weather routing for a fishing vessel on the route between
TRANSCRIPT

105水産工学 Fisheries EngineeringVol. 55 No. 2,pp105〜113,2018
【研究論文】
近海かつお一本釣り漁船の往復航海におけるウェザールーティング検証
三 好 潤1*・長谷川 勝 男1・寺 田 大 介2・溝 口 弘 泰1・松 田 秋 彦1・小 河 道 生3・黒 坂 浩 平3・保 尊 脩3・日 高 浩 一3・萩 原 秀 樹4
Weather Routing for a Fishing Vessel on the Route between Fishing Port and Fish Ground
Jun MIYOSHI1*, Katsuo HASEGAWA1, Daisuke TERADA2 , Hiroyasu MIZOGUCHI1, Akihiko MATSUDA1, Michio OGAWA3, Kohei KUROSAKA3, Osamu HOSON3, Kouichi HIDAKA3 and Hideki HAGIWARA4
Abstract For a fishing vessel, weather information is necessary to ensure safe navigation and to obtain fishing information. On board, fishers use the information on waves, winds, currents and water temperature on the basis of their experiences. Weather routing is one of the method to determine minimum time route or minimum fuel consumption route by using weather information. Recently, weather routing has become an important concept not only safe navigation but also energy saving for a fishing vessel. Thus, since 2014, we have been researching and developing a high-resolution weather routing system for a fishing vessel. We modified the weather routing system of merchant ships for fishing vessels by using a detailed grid size of weather information and incorporating a short calculation interval. This study examined the possibility to apply the weather routing to an actual fishing vessel, a skipjack pole and line fishing vessel, on the route between fishing port and fish ground, which is offshore of the Boso Peninsula in Japan. We introduced the high-resolution weather routing system on board. The results demonstrate that the weather routing can influence energy efficiency, and assist in fishing trip planning, to decide a departure time for fishing grounds.
2018年2月22日受付,2018年8月9日受理キーワード: ウェザールーティング,近海かつお一本釣り,漁船Key words: Weather routing, Skipjack Pole and Line Fishing,Fishing vessel1 National Research Institute of Fisheries Engineering, Fisheries Research and Education Agency, Hasaki 7620-7,
Kamisu, Ibaraki 314-0408, Japan(国立研究開発法人 水産研究・教育機構 水産工学研究所 〒314-0408 茨城県神栖市波崎7620-7)
2 National Defense Academy, 1-10-20 Hashirimizu, Yokosuka, Kanagawa, 239-8686, Japan(防衛大学校 〒239-8686 神奈川県横須賀市走水1丁目10番20号)(研究当時 国立研究開発法人 水産研究・教育機構水産工学研究所)
3 Japan Marine Fishery Resources Research Center, Fisheries Research and Education Agency, Queen's Tower B 15F, 2-3-3 Minatomirai, Nishi, Yokohama, Kanagawa 220-6115, Japan(国立研究開発法人 水産研究・教育機構開発調査センター 〒220-6115 神奈川県横浜市西区みなとみらい2-3-3クイーンズタワーB棟15階)
4 Japan Marine Science Inc., SOLID SQUARE WEST TOWER 3F, Horikawa-cho 580, Saiwai, Kawasaki, Kanagawa, 212-0013, Japan(株式会社日本海洋科学 〒212-0013 神奈川県川崎市幸区堀川町580番地ソリッドスクエア西館3階)
* Tel: 0479-44-5929,[email protected]

106 水 産 工 学 Vol. 55 No. 2
1. 緒 言
近海かつお一本釣り漁業は生鮮のカツオKatsuwonus pelamisを供給する主力漁業である。南西諸島海域や伊豆・房総海域,常磐・三陸海域で主にカツオやビンナガを竿釣りにより漁獲する漁業で,宮崎,高知,三重,静岡を中心に平成27年 1 月現在,56隻1)が運用されている。漁船サイズとしては総トン数20トン以上,120トン未満が大臣許可漁業上の近海かつお・まぐろ漁業として登録されている。 1 航海は 1 日〜 1 週間程で,年間60〜80航海行う。乗組員数は15〜20名である。主な水揚げ港は鹿児島,宮崎,勝浦,気仙沼などである。水産研究・教育機構では開発調査センターが中心に当業船を用船し,近海かつお一本釣り漁業において,漁船の小型化による経営改善効果等について調査を行ってきた2),3)。その一環として著者らは近海かつお一本釣り漁船におけるウェザールーティングによる航海の省エネ・安全性向上に関する調査研究を実施している。
ウェザールーティングは風,波,海流といった気象海象情報を利用し安全な航路や最少燃料航路,最短時間航路といった最適航路を見出す方法で,主に商船を対象として研究が進められ実用化されている4)~9)。他方,漁船のウェザールーティング導入による効果検証が実施された事例は多くない。著者らは漁船の燃油削減に対するニーズから,平成26年度より,遠洋かつお一本釣り漁船を対象に,太平洋を横断するような外航航路の商船向けに開発され,船上で乗組員がウェザールーティングを実行できるシステムを用いて,省エネ航海の可能性を検討してきた10),11)。その結果,遠洋かつお一本釣り漁船の12月〜 3 月の漁場である中西部太平洋漁場やタスマン海公海漁場からの復航,約 8 日間,2,200 mileの航海で約2 kLの燃料削減効果が試算された。他方,太平洋横断に比べるとはるかに航海距離の短い 5 月〜11月の主力漁場である三陸東沖からの復航150〜600 mile程の航海においては,気象データの格子間隔や針路や船速,プロペラ回転数の計算間隔をより詳細化する必要があった。
そこで本稿では,わが国漁船の多くが活動している日本近海域でウェザールーティングを利用することを目的として,既存システムの気象データ間隔や航路計算を詳細化(以下,高解像度ウェザールーティングと記す)し,日本近海で運用される近海かつお一本釣り漁船への適用の可能性を調査した。またウェザールーティングの目的である安全・省エネ向上に加えて,近海かつお一本釣り漁船に適合したウェザールーティング活用方法,すなわち最短時間航路による操業時間確保の可能性について検討した。
2. 方 法
1) 供試船供試船は水産研究・教育機構調査船として用船した総
トン数71トン近海かつお一本釣り漁船「第五萬漁丸」(登録長Lr=23.65 m,登録幅B=5.27 m,登録深さD=2.51 m,満載喫水d=1.78 m)とした(Fig. 1)。本船の平成28年 4 月 1 日から10月31日までの航海実績をFig. 2に示す。 4 月 1 日〜 5 月24日の間は南西諸島海域, 5 月25日〜 6 月23日の間は伊豆・房総海域, 6 月28日〜10月31日の間は常磐・三陸海域で操業した。2) ウェザールーティングによる航路計算本稿で用いたウェザールーティングシステムの最適航
路計算の流れをFig. 3に示す。はじめにシステムにTable 1に示すような船固有の平
水中速力馬力データ,プロペラ単独性能データ,波浪中抵抗増加データ等の船体情報を作成しシステムに入力する。
供試船の平水中船体抵抗に関するデータは,水産工学研究所漁船推進性能実験棟において行った満載及び回航状態の模型試験により得た。推進性能に係る自航データ
(伴流係数及び推力減少係数)は笹島・呉の式(一軸,満載状態)12)により得た。プロペラ単独性能は回流水槽
Fig. 1 A chartered vessel for examination
Fig. 2 Actual trajectories of a target fishing vessel(Apr.1 – Oct.31, 2016)

107 近海かつお一本釣り漁船の往復航海におけるウェザールーティング検証
実験棟におけるプロペラ単独性能試験により得た。波浪中船体応答運動はボディプランを用いたストリップ法により得た。波浪中抵抗増加は,規則波中の抵抗増加応答関数を船体運動に起因する成分を丸尾法13),14)により,船体反射波成分を藤井・高橋法15)により計算し,それらを加えて規則波中抵抗増加応答関数とし,不規則波中の平均抵抗増加量を規則波中船体応答関数と波スペクトラム(Bretschneider16),方向分布関数con2x,x:船と波との出会い角)の線形重ね合わせ理論14)から算出している。また波浪中船体応答運動の計算から加速度,相対変位・相対速度計算を経て,不規則波中の上下加速度,相対変位・相対速度等の標準偏差を得ている。これから船首上下加速度の限界発生確率,海水打ち込み発生確率,スラミング発生確率等を得ている17)。このような手法で不規則波中短期予測の船体応答として,単位有義波高における各喫水,船速毎の各波向き,各平均波周期の平均抵抗増加量,船首相対変位,速度及び加速度等の標準偏差データテーブルを作成して,システムに入力した。それぞれの平均抵抗増加量等の値は風浪及びうねりを別々に計算したうえで加え合わせている。喫水は満載と,修繕ドックから母港への回航(魚倉は空で最小限の燃料、清水を搭載した本船の最も浅い喫水の航海状態)の 2 状態,船速は 2 knotから20knotの 2 knot刻み,波向きは追い波(波向 0 deg.)から向い波(波向180 deg.)の15 deg.刻み,平均波周期は1秒から14秒までは 1 秒刻みで,14秒の次は20秒として計算している。既存システムではすべて 2 秒刻みであったところを漁船用に短波長域を密にして 1 秒刻みとした。システム利用の際には航海時の有義波高,平均波周期,波との出会い角及び船速から,データテーブルの補完によって平均抵抗増加量等が計算される。
平均抵抗増加量の一例として,有義波高 1 m,10 knot
航走時の追い波から向い波における平均波周期に対する平均抵抗増加をFig. 4(風波)及びFig. 5(うねり)に示す。たとえばFig. 4の風波による平均抵抗増加を見ると,波周期4秒の向かい波では約 3 kNの抵抗増加量となる。
気象データは航海時にその都度,Table 2に示すデータを入手する。風,波については全球数値予報モデル
(Global spectra model, GSM)及び全球波浪予報モデル(Global wave forecast model, GWM)を用いる。また今回,日本近海域における詳細な気象情報として気象庁の 新 沿 岸 波 浪 予 報 モ デ ル(Coastal wave forecast model, CWM)を導入した。新沿岸波浪予報モデルでは20°〜50° N,120°〜150° Eの範囲で,等緯度等経度間隔0.05°〜0.20°のデータを利用する。予報データは 3 時間間隔で72時間先まで提供される。新沿岸波浪予報モデルの範囲外については全球波浪予報モデルの等緯度等経度間隔 2 °データを利用する。海流についてはマイアミ大学提供のHybrid coordinate model(HYCOM)を用いる。全球にわたって0.08°データを24時間更新の実績値として利用する。その他,台風データはJoint Warning Center,氷山,海氷はNOAA提供のデータを用いる。システムを船上で運用する際はメールの添付により気象データを受信するため,通信コストを考慮してデータの等緯度等経度間隔を選択の上,利用する。供試船では船舶電話回線を用いてこれらの気象データを得た。
航路の安全性を確保するため,航行に際してあらかじめ航行限界の有義波高を入力し,限界波高に達しない海域が選択される。供試船では限界波高を 3 mとした。船首上下加速度(1/10最大平均値)の限界値の発生確率や海水打ち込み発生確率,スラミング発生確率の限界値に達すると減速される。なおこれら限界値は供試船に対する詳細値を事前に入手できなかったため,商船や艦艇を
Fig. 3 Calculation flow of weather routing system
Items MethodResistance
and self-propulsion Propeller open testShip motion in wavesAdded resistance in waves
Model test and estimation
Model testNew strip methodAdded resistance in waves -Component due to ship motion : Maruo method - Component due to reflection: Fujii and Takahashi methodAveraged added resistance in irregular waves - Linear superposition principle
by added resistance response function in waves and wave spectrum, Bretschneider
Table 1 Input data for ship performance

108 水 産 工 学 Vol. 55 No. 2
基にした各種実験値18~20)や,計算時の安定性を考慮して適宜決定した。ここでは船首上下加速度(1/10最大平均値)の限界値を0.4g,海水打ち込み限界発生確率を0.02,スラミング限界発生確率を0.20とした。
出発点と目的点の緯度経度とプロペラもしくは主機回転数,喫水及び気象データを与えると,⑴〜⑶式に示す前後方向,横方向及び回頭モーメントの釣り合いの式を満たすように,船速V,横流れ角β,舵角δが繰り返し計算により求められる。まず⑵式及び⑶式から横流れ角β及び舵角δを求め,それらを⑴式に代入し,⑴式を満たすように船速Vを変化させ,再度,横流れ角βと舵角δを計算する。これらを繰り返し,船速V,横流れ角β及び舵角δの最終解を得る。
XH+XD+XA+XR+XW+XP=0 ……⑴
YD+YA+YR=0 ……⑵
ND+NA+NR=0 ……⑶
ここでX,Y及びNは⑷式のように船速V,横流れ角β,舵角δ及び回転数nの関数である。
X,Y,N=f(V,β,δ,n) ……⑷
それぞれの要素は以下に示すとおりである。船体横流れ流体力については井上,貴島ら21),22)の式,舵モデルについては貴島ら23)の式,舵直圧力は藤井24)の式を用いている。風による流体力は類似船の風圧抵抗を用いた。
XH :平水中の船体抵抗XD :前後方向の船体横流れ流体力XA :風による前後方向の流体力Xw :波による船体抵抗XR :舵の前後方向の流体力XP :プロペラ推力 YD :横方向の船体横流れ流体力 YA :風による横方向の流体力 YR :舵の横方向の流体力ND :船体横流れ回頭モーメント NA :風による船体回頭モーメント NR :舵による回頭モーメント
繰り返し計算は等時間曲線法25)により行われる。等時間曲線法は出発点から一定時間後に到達する領域を逐次的に求めて最短時間航路を計算する手法である。既存システムでは船速及びプロペラ回転数を 3 時間毎に,針路を 6 時間毎に計算を行うが,本研究で開発している高
Fig. 4 Added resistance in waves at 10 knots on full load condition.
Fig. 5 Added resistance in swell at 10 knots on full load condition.
Weather information ContentsWind and wave - GPV (GSM), 0.5° or 2.0° at equal
latitude and longitude, 192 hours forecast value
- GPV (GWM), 0.5° or 2.0° at equal latitude and longitude, 192 hours forecast value
- CWM (20°−50° N, 120°−150° E), 0.05° or 0.2° at equal latitude and longitude, 72 hours forecast value
Current Hybrid coordinate ocean model (HYCOM), 0.08° at equal latitude and longitude, 24 hours actual value
Typhoon Joint Typhoon Warning Center,every 6 hours forecast value
Table 2 Weather information used in weather routing system
109 近海かつお一本釣り漁船の往復航海におけるウェザールーティング検証
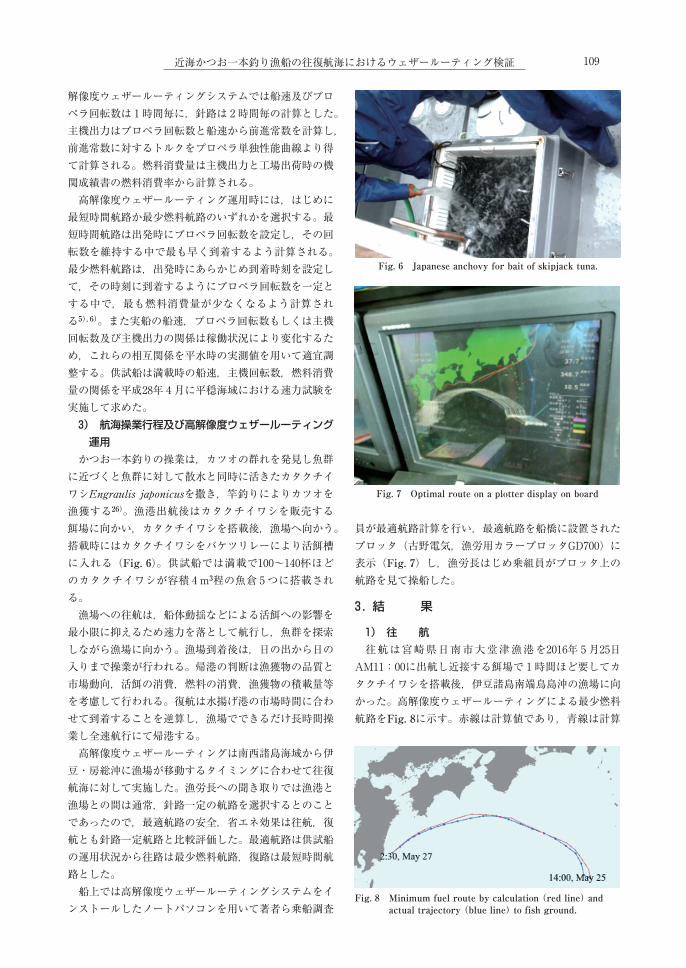
員が最適航路計算を行い,最適航路を船橋に設置されたプロッタ(古野電気,漁労用カラープロッタGD700)に表示(Fig. 7)し,漁労長はじめ乗組員がプロッタ上の航路を見て操船した。
3. 結 果
1) 往 航往航は宮崎県日南市大堂津漁港を2016年 5 月25日
AM11:00に出航し近接する餌場で 1 時間ほど要してカタクチイワシを搭載後,伊豆諸島南端鳥島沖の漁場に向かった。高解像度ウェザールーティングによる最少燃料航路をFig. 8に示す。赤線は計算値であり,青線は計算
解像度ウェザールーティングシステムでは船速及びプロペラ回転数は 1 時間毎に,針路は 2 時間毎の計算とした。主機出力はプロペラ回転数と船速から前進常数を計算し,前進常数に対するトルクをプロペラ単独性能曲線より得て計算される。燃料消費量は主機出力と工場出荷時の機関成績書の燃料消費率から計算される。
高解像度ウェザールーティング運用時には,はじめに最短時間航路か最少燃料航路のいずれかを選択する。最短時間航路は出発時にプロペラ回転数を設定し,その回転数を維持する中で最も早く到着するよう計算される。最少燃料航路は,出発時にあらかじめ到着時刻を設定して,その時刻に到着するようにプロペラ回転数を一定とする中で,最も燃料消費量が少なくなるよう計算される5),6)。また実船の船速,プロペラ回転数もしくは主機回転数及び主機出力の関係は稼働状況により変化するため,これらの相互関係を平水時の実測値を用いて適宜調整する。供試船は満載時の船速,主機回転数,燃料消費量の関係を平成28年 4 月に平穏海域における速力試験を実施して求めた。3) 航海操業行程及び高解像度ウェザールーティング 運用かつお一本釣りの操業は,カツオの群れを発見し魚群
に近づくと魚群に対して散水と同時に活きたカタクチイワシEngraulis japonicusを撒き,竿釣りによりカツオを漁獲する26)。漁港出航後はカタクチイワシを販売する餌場に向かい,カタクチイワシを搭載後,漁場へ向かう。搭載時にはカタクチイワシをバケツリレーにより活餌槽に入れる(Fig. 6)。供試船では満載で100〜140杯ほどのカタクチイワシが容積 4 m3程の魚倉 5 つに搭載される。
漁場への往航は,船体動揺などによる活餌への影響を最小限に抑えるため速力を落として航行し,魚群を探索しながら漁場に向かう。漁場到着後は,日の出から日の入りまで操業が行われる。帰港の判断は漁獲物の品質と市場動向,活餌の消費,燃料の消費,漁獲物の積載量等を考慮して行われる。復航は水揚げ港の市場時間に合わせて到着することを逆算し,漁場でできるだけ長時間操業し全速航行にて帰港する。
高解像度ウェザールーティングは南西諸島海域から伊豆・房総沖に漁場が移動するタイミングに合わせて往復航海に対して実施した。漁労長への聞き取りでは漁港と漁場との間は通常,針路一定の航路を選択するとのことであったので,最適航路の安全,省エネ効果は往航,復航とも針路一定航路と比較評価した。最適航路は供試船の運用状況から往路は最少燃料航路,復路は最短時間航路とした。
船上では高解像度ウェザールーティングシステムをインストールしたノートパソコンを用いて著者ら乗船調査
Fig. 6 Japanese anchovy for bait of skipjack tuna.
Fig. 7 Optimal route on a plotter display on board
Fig. 8 Minimum fuel route by calculation (red line) and actual trajectory (blue line) to fish ground.

110 水 産 工 学 Vol. 55 No. 2
PM19:00,32° 8.7'N,132° 33.8'E)までは,餌場寄港や他船回避等で主機回転数の変動があり,その後は終点まで一定回転数であった。航路計算は主機回転数一定として計算するためFig. 9及びFig. 10の計算値は主機回転数一定となった航海時間 8 時間以降を示した。実績値と計算値の航海中の船速変化をみると概ね傾向は一致している。定量的には計算値が航海時間 8 時間から20時間まではやや大きく,20時間から終点まではやや小さい。主機回転数は全体にわたって計算値がやや大きくなった。
航海時間 8 時間から終点までの平均船速,平均主機回転数及び燃料消費量をTable 3に示す。平均船速及び燃料消費量は実績値と計算値でほぼ同じとなった。全体的にみると実績値と計算値はよく一致しているといえる。
最少燃料航路と針路一定航路(漁労長の通常選択航路としてCaptain’ s route,CRとした)の比較をFig. 11及びTable 4に示す。Fig. 11は海流の流速ベクトルとともに示した。両者を実績値で比較することはできないため,
値を追従した供試船のGPSによる実績値である。始点は餌場を出港してから,浮き漁礁や他船との輻輳海域を通過後の14:00(31° 38.1'N,131° 45.4'E)とした。終点は 5 月27日3:00(30° 51.4'N,138° 52.0'E)に設定した。途中で魚群が発見された場合はウェザールーティングを中断し操業を優先することとしたが,魚群が発見されることなく,ほぼ予定通り計算値を追従して当初の目的とした漁場まで航行した。ただし終点は周辺における漁場選択の関係から設定値より15 mileほど西(30° 53.4'N,138° 38.8'E)となり, 5 月27日AM 2 :30到着となった。最少燃料航路の計算に用いた気象は大堂津出港時AM11:00に取得した 5 月25日 3 :00配信のデータで,風,波は0.20°間隔の予報値,海流は0.08°間隔の実績値である。船体コンディションは出港時の船首喫水2.00mと船尾喫水3.25mを入力した。終点までの約1.5日間における航海中,大きな天候の変化は予想されなかったため途中でリルーティング(気象データの再取得や燃料消費量分の喫水変化を取り入れた最適航路の再計算)は実施せず,始点で計算した最少燃料航路を終点まで用いた。
船速及び主機回転数をFig. 9及びFig. 10に示す。実線は供試船のGPS及び回転計による実績値(サンプリングタイム10秒),破線は計算値である。実績値は出港( 5月25日AM11:00)から漁場到着( 5 月27日 2 :30)までを示した。出港してから航海時間約 8 時間( 5 月25日
Fig. 9 Comparison of ship speed between an actual data and calculation.
Fig. 10 Comparison of engine speed between an actual data and calculation.
Actual Calc. Diff.Average ship speed (knot) 11.70 11.67 − 0.03Average Engine speed (rpm) 1199 1271 72Fuel consumption (kL) 4.04 4.11 0.07
Table 3 Comparison of ship speed, engine speed and fuel consumption between an actual ship and calculation.
MFR(Actual)
CR(Calc.) Diff.
Distance (mile) 364 322 42Average ship speed
(knot) 11.70 10.33 1.37
Average engine speed (rpm) 1199 1323 −124
Fuel consumption (kL) 4.04 4.67 −0.63
Table 4 Comparison of ship performance data between MFR (actual data) and CR (calculation).
Fig. 11 Comparison of trajectories between Minimum fuel route (MFR) by actual data and Captain’ s route
(CR) by calculation, with current velocity.

111 近海かつお一本釣り漁船の往復航海におけるウェザールーティング検証
上述したように実績値と計算値は概ね一致するとの仮定から,実績値の最少燃料航路に対して計算値の針路一定航路を比較した。比較の始点は主機回転数が一定となった 5 月25日PM19:00とした。終点は最少燃料航路の実績値( 5 月27日 2 :30,30° 53.4'N,138° 38.8'E)とした。最少燃料航路は黒潮海流を利用した航路であることが分かる。最少燃料航路は針路一定航路に対して,航海距離は42 mile長いが,平均主機回転数は124 rpm小さく,平均船速は1.37 knot速い。燃料消費量は0.63 kLの減少となった。2) 復 航復航は 5 月28日10:15に漁場(30° 32.7'N,140° 6.71'E)
を出発し 5 月29日 8 :52勝浦港外到着であった。到着時刻は漁労長より市場開場に合わせて 8 :00〜 9 :00到着のリクエストを得たため,それに合わせて最短時間航路によるウェザールーティングを実施した。漁場発の当日は,早朝より漁獲があり,漁場にできるだけ滞在の上,全速力での帰港となった。気象データは, 5 月27日21:00配信のデータで,風,波は0.20°間隔の予報値,海流は0.08°間隔の実績値である。船体コンディションは漁場発時の船首喫水1.75mと船尾喫水3.25mを入力した。往航同様,終点まで大きな天候の変化は予想されなかったため途中でリルーティングは実施せず,始点で計算した最
短燃料航路を終点まで用いた。高解像度ウェザールーティングによる最短時間航路をFig. 12に示す。赤線は計算値であり,青線は計算値を追従した供試船のGPSによる実績値である。
船速及び主機回転数をFig. 13及びFig. 14に示す。実線は供試船のGPS及び回転計による実績値,破線は計算値である。横軸の航海時間は出港時からの航海時間である。漁場発の当日はAM 3 :00頃より魚群探索をはじめ,AM 4 :30頃からAM10:00頃まで操業した。その間,主機回転数及び船速は激しく変動している。漁場発から終点までは主機回転数一定で航行した。実績値と計算値の航海中の船速変化をみると航海時間80時間付近と到着直前で定量的な相違はあるものの,全体的な傾向は概ね一致している。平均船速,平均主機回転数及び燃料消費量をTable 5に示す。平均船速はほぼ同じとなった。主機回転数は16 rpm,燃料消費量は0.22 kL計算値の方が小さい。
最短時間航路と針路一定航路の比較をFig. 15及びTable 6に示す。Fig. 15は海流の流速ベクトルとともに示した。両者を実績値で比較することはできないため,実績値と計算値は概ね一致するとの仮定から,実績値の最短時間航路に対して計算値の針路一定航路を比較した。これから往航と同様,最短時間航路は黒潮海流を利用し
Fig. 12 Minimum time route by calculation (red line) and actual trajectory (blue line) form fish ground to fish landing port.
Fig. 13 Comparison of ship speed between an actual data and calculation.
Fig. 14 Comparison of engine speed between an actual data and calculation.
Actual Calc. Diff.Average ship speed (knot) 12.50 12.49 − 0.01Average Engine speed (rpm) 1366 1350 -16Fuel consumption (kL) 3.63 3.41 − 0.22
Table 5 Comparison of ship performance data between an actual ship and calculation.

112 水 産 工 学 Vol. 55 No. 2
た航路となった。また針路一定航路に対して,航海距離は10 mile長いが,平均船速は1.31 knot大きく,航海時間は 1 時間47分短かった。
4. 考察とまとめ
往航では350 mile前後の距離において0.63 kLの燃料消費削減効果となった。これはたとえばA重油価格を50円/L〜100円/Lとすると31,500円〜63,000円の費用削減になる。CO2排出量にすると2.710kg-CO2/L27)として,1,707 kgのCO2削減になる。最少燃料航路は黒潮海流による大きな追い潮中を航行しており,海流が大きく影響していることが示唆された。ウェザールーティングの計算過程では船首上下加速度が計算される。最少燃料航路と針路一定航路の船首上下加速度をFig.16に示す。最少燃料航路の方が針路一定航路よりも船首上下加速度が小さい。0.4gが乗務員室における限界値18)とされる中,最少燃料航路はより安全な航路であったといえる。また供試船は船首側に魚倉が配置されており,魚倉内のカタクチイワシに対する船体動揺も小さく,斃死率に及ぼす影
響も少ないと推察される。復航について,最短時間航路は黒潮海流による追い潮
中を航行し,約280 mileの距離で 1 時間47分の時間短縮効果となった。針路一定航路を選択する場合は 8 :28に漁場を出発しなければならかったことになる。漁場滞在時間を延長できた分,漁獲量を確保でき収益に貢献したことになる。この間の漁獲量をたとえば300 kg〜600 kg,魚 価 を250円kg〜500円/kgと 仮 定 す る と,75,000円〜300,000円の収益増加になる。
以上のことから,房総沖の往復航海において,ウェザールーティングの安全,省エネ効果の可能性を確認することができた。活餌の生残率向上寄与や,操業時間の確保・帰路のタイミングを図るなど,操業計画での利用といったウェザールーティングの新しい活用方法の可能性を見出すことができた。
5. 今後の課題
今回対象とした航路はFig. 2に示す近海かつお一本釣り漁船の年間航海において,比較的航海距離が長い。今後は周年もしくはより長い期間でのウェザールーティングの効果や活用方法について検討する必要がある。また今回のウェザールーティングは,漁労長ではなく著者らによって実施した。漁船の船上で実施する際には,漁労長より利便性に関するいくつかのニーズがあり,今後,それらに応えるための検討が必要である。安全性指標の船体上下加速度や海水打ち込み発生確率等の限界値については,今後,供試船をはじめ漁船の値を検討したい。
謝 辞本研究は水産研究・教育機構の平成28年度海洋水産資
源開発事業における開発強化連携プロジェクトとして実施されました。ウェザールーティングを実施させていただきました日南市漁業協同組合大堂津支所長の吉田勝明様,(有)日高水産「第五萬漁丸」船主の日高誠悟漁労長様,山本潤二機関長兼冷凍長様はじめ乗組員の皆様,本船の船体設計情報をご提供いただきました(株)ニシエフの綿谷智史様,ウェザールーティングシステムの開
Fig. 15 Comparison of trajectories between Minimum time route (MTR) by actual data and Captain’ s route
(CR) by calculation, with current velocity.
MFR(Actual)
CR(Calc.) Diff.
Departure time 10:15, May 28 8:28, May 28Arrival time 8:52, May 29 8:52, May 29Navigation time 22h 34m 24h 21m −1h47mDistance (mile) 283 273 10Average ship speed (knot) 12.50 11.19 1.31
Average engine speed (rpm) 1366 1350 16
Fuel consumption (kL) 3.63 3.66 − 0.03
Table 6 Comparison of ship performance data between MTR (actual data) and CR (calculation).
Fig. 16 Comparison of vertical acceleration, 1/10 maximum average, at bow between Minimum fuel route
(MFR)and Captain’s route (CR) by calculation.

113 近海かつお一本釣り漁船の往復航海におけるウェザールーティング検証
発・提供及び船体データの作成を行っていただきました(株)日本海洋科学の西澤慶介様,岡田尚樹様,米原章浩様,岡野匡様,船橋プロッタへの最適航路表示及び各種調整を行っていただきました古野電気株式会社の皆様,ウェザールーティング実施調査についてご討論いただいた水産研究・教育機構 開発調査センターの皆様に深く感謝申し上げます。
参 考 文 献 1) 水産総合研究センター開発調査センター:平成26
年度海洋水産資源開発事業(近海かつお釣)報告(速報),No.435,2016.
2) 小河道生:漁船漁業のビジネスモデル構築に向けた挑戦,海洋水産エンジニアリング,第131号,pp.82-95,2017.
3) 水産総合研究センター開発調査センター:平成26年度海洋水産資源開発事業報告書(近海かつお釣:九州周辺〜三陸周辺海域),2016.
4) 萩原秀樹,巻島 勉:最適航路に関する考察,日本航海学会論文集,第62号,pp.77-87,1980.
5) 萩原秀樹:最少燃料航路に関する考察,日本航海学会論文集,第69号,pp.121-131,1983.
6) 萩原秀樹:気象・海象の予測精度情報に基づく確率的なウェザールーティング,日本航海学会論文集,第83号,pp.155-167,1990.
7) 萩原秀樹,庄司るり:確率的なウェザールーティングに関する研究−航海時間と燃料消費量の標準偏差の推定精度−,日本航海学会論文集,第104号,pp.1-11,2001.
8) ウェザー・ルーティング研究グループ:ウェザー・ルーティング−気象情報に基づく最適航法−,成山堂書店,1992.
9) 関根 博,日本海洋科学:実践航海術,3-9 ウェザールーティング,成山堂書店,pp.100-112,2015.
10) 水産総合研究センター開発調査センター:平成26年度海洋水産資源開発事業報告書(遠洋かつお釣:太平洋中・西部海域),2016.
11) 三好 潤,長谷川勝男,寺田大介,溝口弘泰,松田秋彦,伏島一平,大島達樹,木村拓人,萩原秀樹:漁船に適したウェザールーティングについて−遠洋かつお釣漁船の場合−,日本航海学会航法システム研究会報告,日本航海学会誌,第199号, pp.81-82,2017.
12) 笹島英雄,呉 清達:肥大船型の水槽試験結果の整理に関する一つの試み−主として形状影響係数について−,関西造船協会誌,第139,pp. 25-34,
1971. 13) 丸尾 孟:波浪中の船体抵抗増加に関する研究
(第 1 法), 造船協会論文集第101号,pp.33-39,1957.
14) 丸尾 孟:波浪中の船体抵抗増加に関する研究 ( 第 2 報 ), 造 船 協 会 論 文 集 第108号,pp.5-13,1960.
15) 藤井 斉, 高橋 雄:肥大船の波浪中抵抗増加推定法に関する実験的研究,日本造船学会論文集,第137号,pp.132-137,1975.
16) Edward V. Lewis: Princ ipa ls o f Naval Architecture, Second Revision, Volume III, Motions in Waves and Controllability, pp.37-38, 1989.
17) 中村彰一,耐航性の諸要素,耐航性シンポジウムテキスト,日本造船学会,pp.121-141,1969.
18) 造船設計便覧,関西造船協会,海文堂,pp.431,1983.
19) 北沢孝宗,黒井昌明,高木又男:コンテナ船の波浪中での限界速度,日本造船学会論文集,第138号,pp.269-276,1975.
20) 黒田貴子,田口晴邦,宝谷英貴,築山直樹:小型高速旅客船の実船計測と運航限界について,日本船舶海洋工学会講演会論文集,第20号,pp.381-384,2015.
21) 井上正祐,貴島勝郎,平川雄二,向井一浩:等吃水船体の操縦微係数について,西部造船会々報,pp.13-19,1978.
22) 井上正祐,平野雅祥,向井一浩:操縦時船体に働く横力・モーメントの非線形項について,西部造船会々報,第58号,pp.153-160,1979.
23) 藤井斉,津田達雄:自航試験による舵特性の研究 (2),日本造船協会論文集,pp.31-42,1961.
24) Katsuro Kijima, Toshiyuki Katsuno, Yasuaki Nak i r i , Yosh i t aka Furukawa: On the manoeuvring performance of a ship with the parameter of loading condition, Journal of The Society of Naval Architects of Japan, Vol.168, pp.141-148, 1990.
25) J. A. Spaans, Hideki Hagiwara: Computation of Optimum Routes for Ship Weather Routing, Proceedings of the International Seminar on Ship Weather Routing, Tokyo, pp.1-31, 1987.
26) 小河道生,黒坂浩平:水産海洋ハンドブック第 3版,第 4 章漁業技術 4.13.8 かつお一本釣り,生物研究社,pp.286-287,2016.
27) 長谷川勝男:わが国における漁船の燃油使用量とCO2排出量の試算,水産技術,第 2 巻 2 号,pp. 111-121,2010.