week chapter - physics & astronomyseidel/phys304-spring2016/phys304...an overview of the course...
TRANSCRIPT

An overview of the courseWeek Chapter1 Ch. 7, Sections 10-132 Ch. 9, Sections 1-53 Ch. 9, Sections 6-8; Ch. 8, Sections 3-64 Ch. 9, Section 10; Ch. 10, Sections 1-35 Ch. 10, Section 4; Ch. 11, Sections 1-36 Linear algebra review; Ch. 11, Sections 4-77 Rotation matrix review; Ch. 11, Sections 8-108 Ch. 11, Sections 11-12; Ch. 12, Section 19 Ch. 12, Sections 2-310 Ch. 12, Sections 4-911 Ch. 13, Sections 1-412 Ch. 13, Sections 5-813 Ch. 13, Section 9; online pages 232-251 14 online pages 313-34915 online pages 313-349, continued 1

2
Please read Thornton Chapter 7, Sections 10-13.
I. Hamilton's Equations of MotionII. Generalized coordinates and the importance of the Hamiltonian
3
I. Hamilton's EquationsPlan: (1) derive them, then (2) explain why they are useful
(1) They are an alternative to Lagrange's Equation and to Newton's Laws.
Recall the Lagrangian L = m2x2 + y2 + z2( )−U x, y, z( )
Then ∂L∂ xi
= mxi = pi regular linear momentum
Generalize this from "xi " to "qi " where qi may or may not have units of length.For example, if we transform to spherical coordinates, (x,y,z)→ (r,θ ,φ). Anglesθ and φ are valid qi but do not have units of length.qi is called a generalized coordinate.
Then by definition, ∂L∂ qi
= pi
pi is called generalized momentum, unfortunately with the same symbol asregular linear momentum.

4
Note that the units of pi depend upon the units of qi so they may not be kg -m2 / s2.Now use this definition of pi to derive an alternative form of Lagrange's Eq:
∂L∂qi
− ddt
∂L∂ qi
⎛⎝⎜
⎞⎠⎟= 0
∂L∂qi
= ddt
∂L∂ qi
⎛⎝⎜
⎞⎠⎟
∂L∂qi
= ddt
pi( )∂L∂qi
= pi Alternative form of Lagrange's Eq, using generalized momentum.
Compare Lagrangians and HamiltoniansL = L qi , qi ,t( ). Lagrangian is always expressed as a function of q, q, and t.
H ≡ pi qi − Li∑ qi , qi ,t( ) : so the Hamiltonian appears to require 4 arguments:
p, q, q, t. This would be redundant because p = ∂L∂ qi
= p q( ).

5
Removing this redundancy: by convention, when writing H , we solve for the qi in terms of pi . ALWAYS write H = H qi , pi ,t( ). Answers containingH ( qi ) will usually be marked wrong.
To derive Hamilton's Equations of motion, compare 2 equally true expressions:
H = H qi , pi ,t( ) H = pi qi − L qi , qi ,t( )i∑
-Take the total derivative of each-
dH = ∂H∂qi
dqi +∂H∂pi
dpi +∂H∂t∑
i∑ dH = qidpi + pid qi −
∂L∂qi
dqii∑
i∑ −
i∑ ∂L
∂ qid qi
i∑ − ∂L
∂t
Plug in: ∂L∂qi
= pi and ∂L∂ qi
= pi
dH = qidpi + pid qi − pidqii∑
i∑ −
i∑ pid qi
i∑ − ∂L
∂t
The 2 expressions for dH must mean the same thing, so we can identify coefficients of similar terms.

6
Coef. of LHS RHS Conclude :
dqi ∂H∂qi
− pi − pi =∂H∂qi
dpi ∂H∂pi
qi qi =∂H∂pi
These are Hamilton's Equations of Motion, also called "Canonical Equations of Motion."

7
II. The importance of generalized coordinates and Hamilton's Equations1) We see that for every generalized coordinate qi that we can think of,there is a conjugate momentum pi . They can be grouped in pairs.
Recall Heisenberg's Uncertainty Principle,
Δx ⋅ Δp ≥
which means, 'we cannot simultaneously measure position and momentum with perfect precision. The product of their uncertainties will always begreater than .'
This follows from the wave character of things.

8
In Phys 491 this will be extended to:
Δqi ⋅ Δpi ≥ which can mean:
Δx ⋅ Δp ≥ Δt ⋅ ΔE ≥ Δθ ⋅ΔL ≥
The conjugate quantity that is conserved. The feature of space that is homogeneous/isotropic.
2) In quantum mechanics, the Hamiltonian is the operator that evolves
states forward in time: ψ (t) = e− itH ψ (0)
3) They introduce the idea of phase space, which is conserved.
9
I. Phase spaceII. Virial TheoremIII. Systems of particlesIV. Reminder about center-of-mass for continuous substancesV. Newton's Third Law
10
I. Phase spaceSuppose a system can be described by a set of generalized coordinates with s members: q1, q2, q3, .... qs We say "the configuration space for this system is s-dimensional."
For each qi there is a generalized momentum pi ≡∂L∂ qi
.
So there are also s pi's.The space of the qi is "configuration space" (s-dimensional).The space of the pi is "momentum space" (s-dimensional).The combined space is "phase space" (2s-dimensional).
If we can visualize six dimensions (for example x, y, z, px , py , pz ) we can imagine
representing the state of a system by plotting its values of x, y, z, px , py , pz( ) on a
graph at any time t that we are interested in.
If the system is only 1 object, it will have a unique set x, y, z, px , py , pz( ) at each t.
In principle they can all be known for a Newtonian particle.Every point on the graph is an allowed state of the system.

11
If the system is a large number n of objects (such as a cloud of gas or a particle beamin an accelerator), it is i) impractical to know the 6-coordinates of all n objects simultaneously.ii) possible to get the same phase space state in more than one way.
Example - consider a system of n = 3 particles named (A, B, C)existing in s = 3 dimensions (x, y, z).
Define the state as "1 particle has xyzpx py pz = xα yα zα px,α py,α pz,α another particle has xyzpx py pz = xβyβzβ px,β py,β pz,β and the remaining one has xyzpx py pz = xγ yγ zγ px,γ py,γ pz,γ "There are N = 6 ways to achieve this:A A B B C CB C A C A BC B C A B A
As n increases, the number of ways N to interchange equivalent particles becomes immense.
Also called the ensemble of equivalent systems

12
Consider a differential generalized length dq1. Suppose it spans the values thatq1 can have for a system.Consider similar ranges for all the other dimensions:dq2, dq3, ....dqs , dp1, dp2, ...dps .
The product dq1 ⋅dq2 ⋅dq3 ⋅....⋅dqs ⋅dp1 ⋅dp2 ⋅...⋅dps is a 2s-dimensional volumethat spans the allowed values that the system can have. Call it dv.
We can define the density of phase space:
ρ ≡ Ndv
.
Why this is useful: because ∂ρ∂t
= 0. The density of representative points in phase
space corresponding to motion and position of the elements of a system is constantin time. This is called Liouville's Theorem.

13
So for example consider a box of gas with range of particle positions andmomenta. Expand the box so the range of allowed values dqi increases. The dpi must decrease to compensate. We detect this as cooling.

14
II. Virial theoremGoal: show that for a system of many particles, with average KE = Tand responding to a potential U = krn+1,
T and U are related by T = n +12
U
For gravitation, U ∝ 1r
, so n = −2.
Then for gravitationally interacting particles: T = − 12U
Show this:Consider a group of objects indexed by α (α=1, 2, ..., to the total # of objects)Each object has a momentum p and a location r.
Invent a function S ≡ pα ⋅rα (unmotivated!)
α∑
Then dSdt
= pα ⋅ rα + pα ⋅rα( )α∑ (leaving off vector arrows for simplified notation)

15
Average dSdt
over some time period τ .
dSdt⇓
= pα ⋅ rα + pα ⋅rα( )α∑
1τ
dSdtdt
0
τ
∫S τ( )− S 0( )
τNow let τ → ∞, so the LHS→ 0.In that case the RHS must also = 0:
pα ⋅ rα + pα ⋅rα( )α∑ = 0
pα ⋅ rα( )α∑ = − pα ⋅rα( )
α∑

16
pα ⋅ rα( )α∑ = − pα ⋅rα( )
α∑
Notice:
T = mv2
2, so F = ma = dp
dt= p
2T = mv ⋅v so p ⋅r⇒ F ⋅r2T = p ⋅v2T = p ⋅ r
2Tαα∑ = − Fα ⋅rα
α∑
Tαα∑ = − 1
2Fα ⋅rα
α∑
Carry out the LHS sum, then for the whole system
T = − 12
Fα ⋅rαα∑ "Eq 1"

17
Consider the case where F = -∇U
Then T = 12
∇Uα ⋅rαα∑
Suppose F ∝ rn
Then U=krn+1
∇U ⋅r = dUdr
⋅r
= k n +1( )rn ⋅r = k n +1( )rn+1
= n +1( )U
Then T = 12
n +1( )Uαα∑
T =n +1( )
2U

18
Remember: when F ∝ r−2 (i.e., gravity, EM), then n = −2, so
T = − 12U .
An interesting application...Look back at it in the form
T = − 12
Fα ⋅rα
α=1
N
∑ Eq 1, slide 16
This allows calculation of T for statistically large numbers of bodies.We see that the virial theorem does not show a dependence on temperatureor even thermal equilibrium.At the same time we know that T must be related to temperature.These facts are used to infer the existence of dark matter and of the Chandrasekhar (mass) limit of white dwarfs.
Please read Thornton Chapter 9.
19
III. Systems of particlesConsider a system of N particles. We will see (Chapters 10&11) that it isconvenient to describe the - motion - energy - linear momentum p - angular momentum
L
and moreas a combination of: behavior of the center of mass relativeto some fixed coordinate system⎡
⎣⎢
⎤
⎦⎥ +
motion of individual membersrelative to the center of mass⎡
⎣⎢
⎤
⎦⎥.
The first part of Chapter 9 sets up the formalism for using this relation.

20
IV. Reminder about center-of-mass for continuous substancesRecall center of mass:
R ≡
miri
i∑
mii∑ = 1
Mmiri
i∑
If the mass is continuously distributed (not discrete),
mi ⇒ dmx,y,z∫∫∫
i∑
If the mass has density ρ = dmdVol
, then dm = ρdVol, and then
R = 1
Mρr dVol.
x,y,z∫∫∫
For a totally symmetric object of uniform ρ, R is at the center.
For a totally asymmetric object, R is hard to compute.

21
Here is a 5-step method for find R of a semi-symmetric object like a hemisphere
of radius "a":
1) Identify the axis of symmetry (call it z)
2) R i along the axes ⊥ to the symmetry axis R x = 0are probably zero. R y = 0
3) Slice object ⊥ to symmetry axis.dVol = dz ⋅ area of slice( )
Look down at this slice:
z
a
az
a2 − z2
dz

22
Disk of radius r = a2 − z2
has area πr2 = π a2 − z2( ) dVol = dz ⋅π a2 − z2( )4) Integrate Ri =
1M
ρri dVol∫ . Rz =1M
ρzdz ⋅π a2 − z2( )0
a
∫
This "i" could be x, y, or z depending = ρπM
zdz a2 − z2( )0
a
∫
on the symmetry axis. =πa4
4⋅ ρM
a2 − z2
23
5) Notice ρ ⋅dVol = M Notice 12
ρ ⋅ 43πa3⎛
⎝⎜⎞⎠⎟ = M
hemisphere
So ρM
= 32πa3
Then R z =πa4
4⋅ 3
2πa3⎛⎝⎜
⎞⎠⎟
R z =3a8

24
V. Newton's Third Law: "Strong Form"Consider a system of N particles.Concentrate on 2 of them, Particle α and Particle β.
1) The Weak Form of Newton's Third Law:
The force of α on β is fβα
The force of β on α is fαβ
fαβ = −
fβα
Notice this allows for the possibility that the force does not point along the line between the particles, i.e., this would be allowed:
fαβ •α β • fβα
25
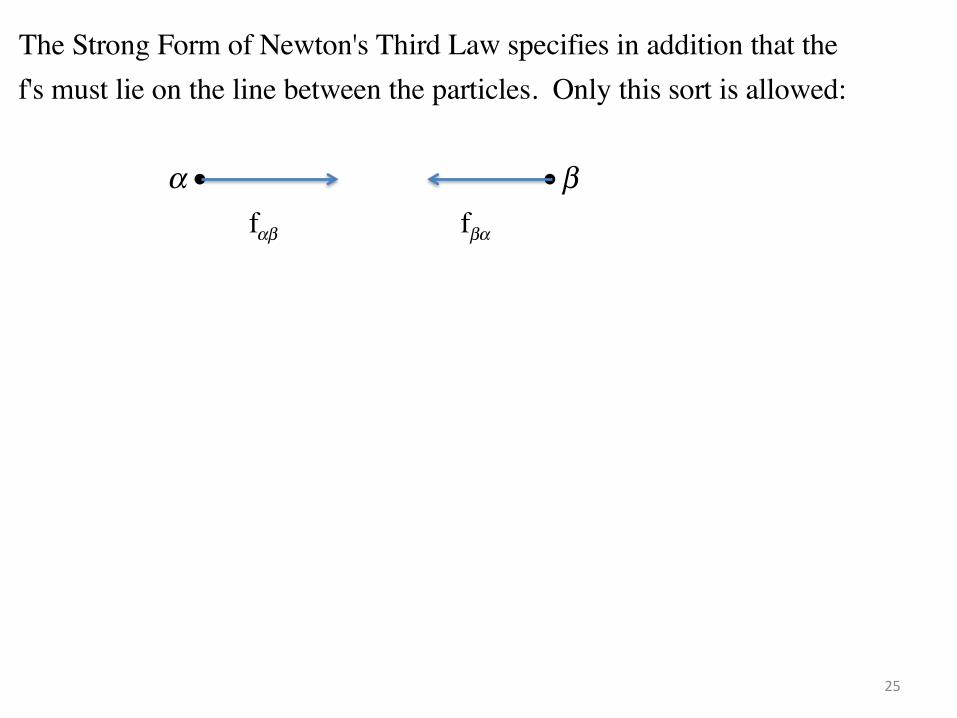
The Strong Form of Newton's Third Law specifies in addition that thef's must lie on the line between the particles. Only this sort is allowed:
α • •β fαβ fβα

26
I. Linear momentum of a systemII. Angular momentum of a systemIII. Torque of a system
27
I. Linear momentum of a systemConsider a system of N particles. Consider 1 particle in the system: Particle α .Particle α may experience 2 types of forces:1) Fα
external : forces on α due to some source that is not one of the other members of the system2) fαβ : force on α due to another particle β in the system
Let fα = fαββ∑ be the sum of all the internal forces on Particle α .
Then Fαtotal = Fα
external + fα
Consider Newton's Second Law, for constant mass:F = ma = d 2
dt 2 mr( )For Particle α this is:
Fαexternal + fαβ
β∑ = d 2
dt 2 mαrα( )

28
Now sum over all α :
Fαexternal
α∑
+ fαββ∑
α∑
= d 2
dt 2 mαrα( )α∑
"Eq 2"
Call this F d
2
dt 2 mαrα( )α∑
But R ≡ 1
Mmαrα( )
α∑
d2
dt 2 MR( )
MR
Consider THIS term. We will show that it = 0.

29
We can write fαββ∑
α∑ as fαβ
β≠α∑
α∑ because fαα = 0, particle does not interact with itself.
Then fαββ∑
α∑ = fαβ + fβα( )
α<β∑
To demonstrate this, compare both sides for α ∈ 1,2,3{ } and β ∈ 1,2,3{ } :
fαββ∑
α∑ = f11 + f12 + f13 + f21 + f22 + f23 + f31 + f32 + f33
= f12 + f13 + f21 + f23 + f31 + f32
fαβ + fβα( )α<β∑ = fαβ
α<β∑ + fβα
α<β∑ = f12 + f13 + f23[ ]+ f21 + f31 + f32[ ]
Thus rewrite Eq 2:F + fαβ + fβα( )
α<β∑ = M
R
But from Newton's Third Law, fαβ = −
fβα
F = M
R

30
Conclusions:
1) The center of mass ("CM") moves as if it were a single particle of mass M = mαα∑
acted on by a force F = Fαexternal
α∑ .
The internal forces fαβ have no effect upon the CM.
2) F = MR = P, where P is the momentum of the CM.So if F = 0 then P = 0, so P = constant.Also:P = mα
rα = mαddtrα
α∑
α∑ This is the definition of the total momentum of the system
= ddt
mαrα
α∑
= ddt
MR( )
= M dRdt
= M R This is the definition of the momentum of the CM3) The total momentum and the momentum of the CM are the same thing.
31
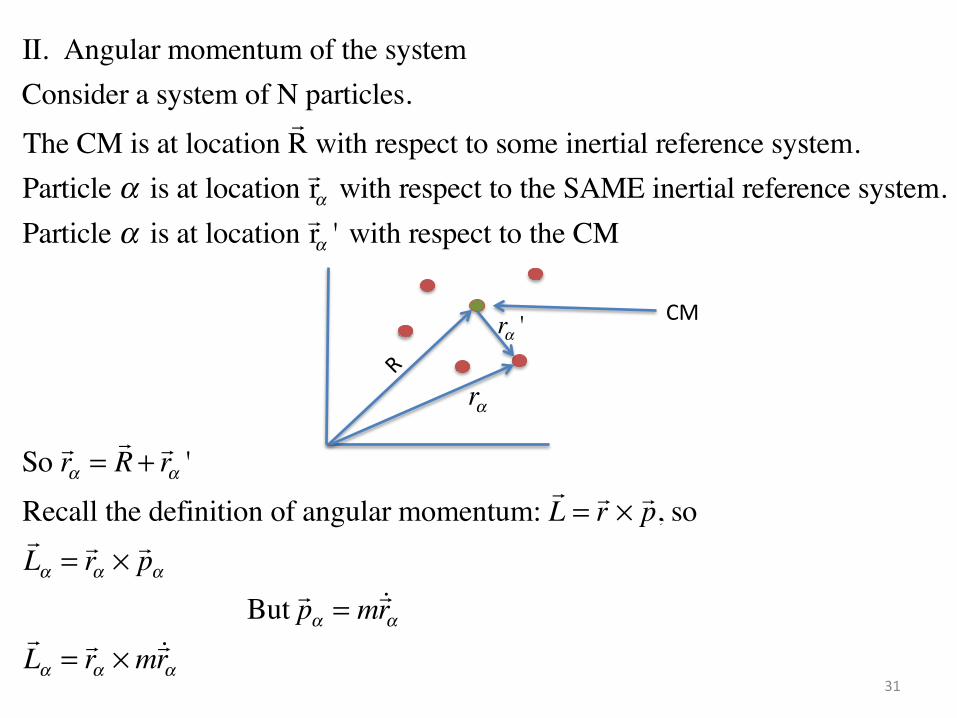
II. Angular momentum of the systemConsider a system of N particles.The CM is at location
R with respect to some inertial reference system.
Particle α is at location rα with respect to the SAME inertial reference system.Particle α is at location rα ' with respect to the CM
So rα =R + rα '
Recall the definition of angular momentum: L = r × p, so
Lα = rα ×
pα But pα = mrαLα = rα ×m
rα
CM rα '
rα

32
Sum over all the particles:
Ltot = Lαα∑ = rα ×mα rα( )
α∑
Plug in rα = R + rα '
Ltot = R + rα '( )×mαR + rα '( )⎡⎣ ⎤⎦
α∑
= mα R + rα '( )× R + rα '( )⎡⎣ ⎤⎦α∑
= mαrα 'α∑ × R + mαR
α∑ × rα '+ mαR × R
α∑ + mαrα '
α∑ × rα '
Term1 Term2 Term3 Term4

33
Term1 = mαrα 'α∑⎛⎝⎜
⎞⎠⎟× R
= mα rα − R( )α∑ × R
= mαrα − R mαα∑
α∑⎡⎣⎢
⎤⎦⎥ × R
Notice: R ≡mαrα
α∑
mαα∑ =
mαrαα∑M
So MR = mαrαα∑
= MR − RM[ ]× R = 0 × R = 0 Thus Term1 = 0.
Conclude: mαrα 'α∑ = 0 "Eq 1"

34
Term2 = mαR × rα 'α∑
= R × mα rα 'α∑
=R × ddt
mαrα 'α∑
= 0 from Eq 1.Thus Term2 = 0
Term3 = mαα∑⎛⎝⎜
⎞⎠⎟R × R
= MR × R = R ×M R = R × P = L of the Center of Mass

35
Term4 = mαrα '× rα 'α∑
= rα '× mα rα '( )α∑
= rα '× pα 'α∑
= Lα = the sum of Lα of each particle ABOUT the center of massα∑
Rewrite all 4 terms:For a system of particles,Ltot = 0 + 0 +
R ×P + rα '× pα '
α∑
"The total angular momentum of a system of N particles is the sum of theangular momentum of the center of mass and the angular momentum of the individual particles about the center of mass."

36
III. Torque of a systemConsider again the system of N particlesThe angular momentum of particle α is:Lα = rα × pαTake its time derivative:
Lα = ddt
rα × pα( ) = r × p + r × p = r ×mr + r × p = m r × r( ) + r × p
0So Lα = rα × pα Recall F = Fext + F int = ma = p
So Fαext + fαβ
β≠α∑ = pα
Lα = rα × Fαext + fαβ
β≠α∑
⎛
⎝⎜⎞
⎠⎟

37
Sum over all α (i.e., over all particles):Ltot = Lα = rα × Fα
ext( ) + rα × fαβ( )β≠α∑
α∑
α∑
α∑
Total torque(Marion callstorque "N")
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
External torque"Term A"⎡
⎣⎢
⎤
⎦⎥
Internal torque"Term B"⎡
⎣⎢
⎤
⎦⎥
Examine Term B:
We showed explicitly on Slide 30 that vαβ = vαβ + vβα( )α<β∑
β∑
α∑
So write Term B as
Term B= rα × fαβ( ) + rβ × fβα( )⎡⎣ ⎤⎦α<β∑
Recall Newton's Third Law: fαβ = −
fβα .

38
Then Term B = rα × fαβ( ) + rβ × − fαβ( )( )⎡⎣
⎤⎦
α<β∑
= rα × fαβ( )− rβ × fαβ( )⎡⎣ ⎤⎦α<β∑
= rα − rβ( )× fαβ⎡⎣ ⎤⎦α<β∑
Plot particles α and β:
rα
rβ
rαβ ≡
rα −rβ

39
So Term B= rαβ × fαβ 'Eq 2'α<β∑
Now recall the strong form of Newton's Third Law:
"fαβ = −
fβα AND they point along the same direction":
i.e.,
fαβ
fβα
NOT
fαβ
fβα
so: rαβ || fαβso rαβ × fαβ = 0 for every α ,β.

40
Rewrite:Term B, the internal torque of the system, equal to the sum of torques appliedon particles in the system by other particles in the system,equals zero if the forces are central (i.e. if the forces manifest the strong formof Newton's Third Law).
Thus the total angular momentum L of a system is not affected by Term B.The total angular momentum L of a system is not affected by internal torques.
τ = Ltot = Lα = rα × Fαexternal( )
α∑
α∑ = τα
external
α∑
Term A only
The total torque on a system is the sum of the external torques.
41
I. Energy of a systemII. Conservation of energy of a system

42
I. Energy of a systemConsider again the system of N particles indexed by α .The system initially has Configuration "1".Suppose some forces Fα act on the particles, doing work.This could shift the whole system to a new position or rearrange the particlesabout the center of mass, or both. The new configuration = "2".
Work done is
W12 =Fα ⋅drα
config1
config2
∫α∑ [now temporarily ignore subscripts α ]
m dvdt
drdtdt
W12 = mdvdt
⋅ vdt
= m ⋅ 12ddtv ⋅ v( )dt

43
W12 =m2ddt
v2( )dt
= d mv2
2⎛⎝⎜
⎞⎠⎟
= dT kinetic energy
So W12 = dTαconfig1
config2
∫α∑ = Tconfig2 −Tconfig1
Choose a reference frame such that Tconfig1 = 0.Then W12 = Tconfig2. Work done = change in total kinetic energy.
W12 = Tαα∑
= 12 mαvα
2
α∑
= 12 mα rα ⋅ rα( )
α∑

44
Recall rα = rα '+ Rso rα = rα '+ R
So W12 = 12 mα rα '+ R( ) ⋅ rα '+ R( )⎡⎣ ⎤⎦
α∑
= 12 mα rα '⋅ rα '( )
+ 2 rα '⋅ R( ) + R ⋅ R( )
⎡
⎣⎢⎢
⎤
⎦⎥⎥α
∑
v'α( )2 , velocity of particle α about the CM
⎡
⎣⎢⎢
⎤
⎦⎥⎥
V 2, velocity of CM⎡⎣ ⎤⎦
R
r 'α
rα
COM
45
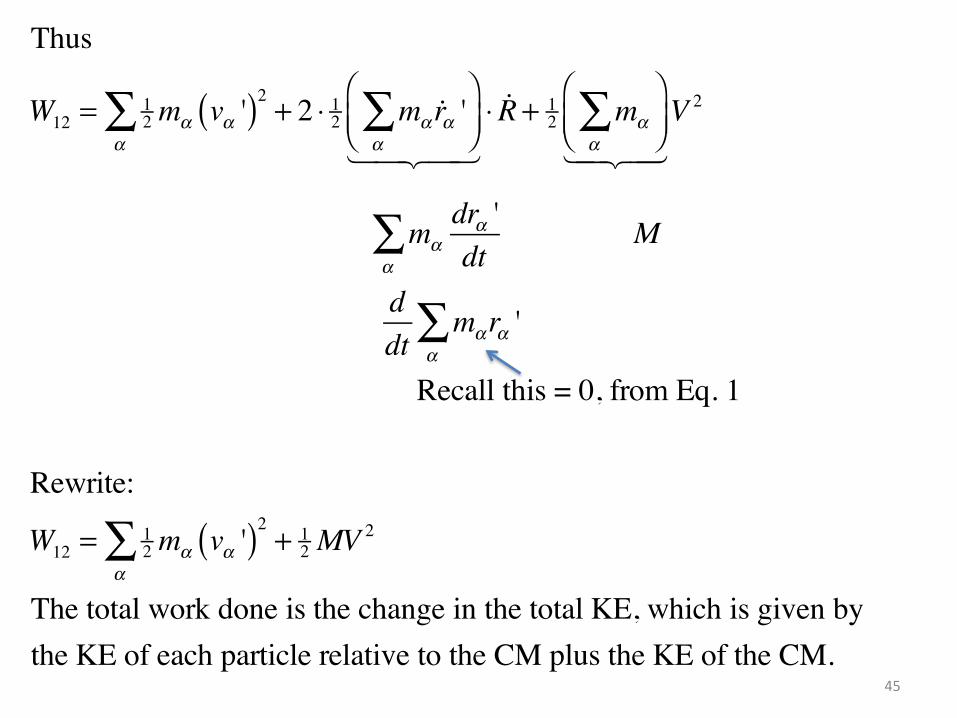
Thus
W12 = 12 mα vα '( )2 + 2 ⋅ 1
2 mα rα 'α∑⎛⎝⎜
⎞⎠⎟ α
∑ ⋅ R + 12 mα
α∑⎛⎝⎜
⎞⎠⎟ V 2
mαdrα 'dtα
∑ M
ddt
mαrα 'α∑
Recall this = 0, from Eq. 1
Rewrite:
W12 = 12 mα vα '( )
α∑ 2
+ 12 MV
2
The total work done is the change in the total KE, which is given bythe KE of each particle relative to the CM plus the KE of the CM.
46
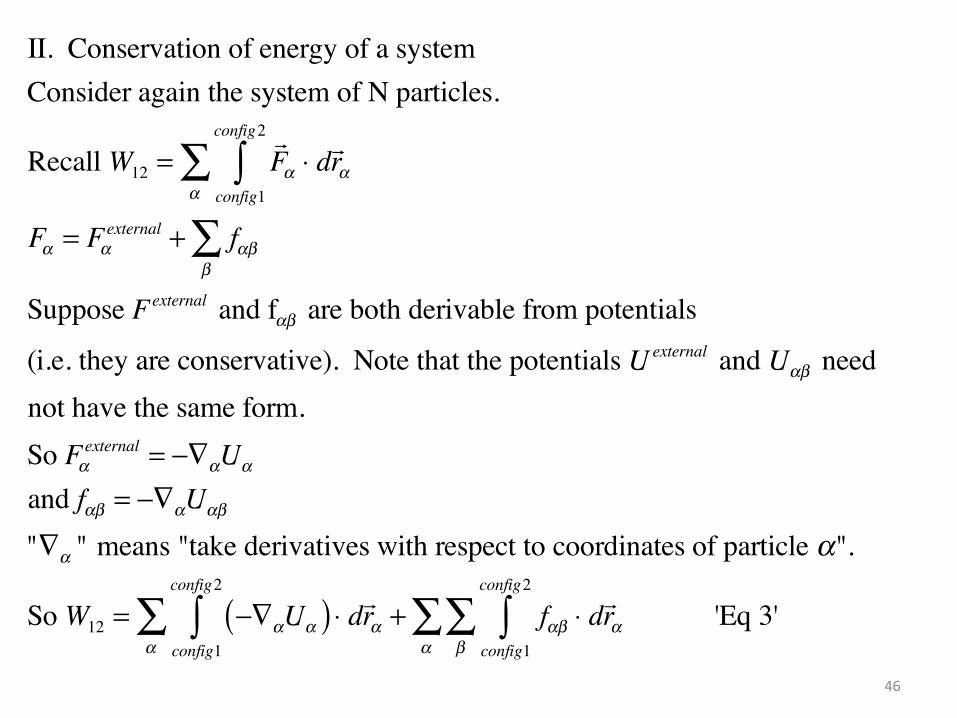
II. Conservation of energy of a systemConsider again the system of N particles.
Recall W12 =Fα ⋅
config1
config2
∫α∑ drα
Fα = Fαexternal + fαβ
β∑
Suppose Fexternal and fαβ are both derivable from potentials
(i.e. they are conservative). Note that the potentials Uexternal and Uαβ neednot have the same form.So Fα
external = −∇αUα
and fαβ = −∇αUαβ
"∇α " means "take derivatives with respect to coordinates of particle α".
So W12 = −∇αUα( ) ⋅config1
config2
∫α∑ drα + fαβ ⋅
config1
config2
∫β∑
α∑ drα 'Eq 3'

47
rα
rβ
rαβ
drα
drβ
drαβ
fαβconfig1
config2
∫ ⋅drα = fαβconfig1
config2
∫α<β∑
β∑
α∑ ⋅drαβ analogously to Eq. 2 on slide 39
drαβ ≡ drα − drβ
Uαβ = − fαβ ⋅drαβ∫ = dUαβ∫Thus
fαβconfig1
config2
∫α<β∑ ⋅drαβ = −dUαβ( )
config1
config2
∫α<β∑
Thus Eq 3 becomes:
W12 = −∇αUα( ) ⋅drα +config1
config2
∫α∑ −dUαβ( )
config1
config2
∫α<β∑
=− Uαα∑
config1
config2
− Uαβα<β∑
config1
config2

48
Thus Eq 3 becomes:
W12 =− Uαα∑ + Uαβ
α<β∑⎡
⎣⎢
⎤
⎦⎥
config1
config2
"U", the sum of PE for every particle α with respect to the external source, plus PE of every particle with respect to other particles in the system .
"internal PE"
So W12 =−U 12 =U1 −U2
We already showed that W12 = T2 −T1 [slide 42]Thus T2 −T1 =U1 −U2
So T2 +U2 = T1 +U1
E2 = E1, energy is conserved