welcome to critical design review project legacy€¦ · · 2016-04-27welcome to critical design...
TRANSCRIPT
WELCOME TO CRITICAL DESIGN REVIEW
PROJECT LEGACY Project Manager: Trevor Jahn
Assistant Project Manager: Michael Young

PROJECT OVERVIEW
Photo Credit: (NASA, 2016)
Design a proving ground mission for a lunar base which functions to understand the effects of long term crewed missions, to achieve science objectives and to advance technologies for the eventual
establishment of a crewed Mars base.

PROJECT LEGACY Project Specifications – Lunar Surface
• 9 habs
• Radiation Shielding
• 2 autonomous/crewed rovers
• In-Situ Resource Utilization (ISRU)
• Fuel Depot
• 4 Science Probes
• 3 Science Rovers (Range of +1200 km)
• +3 Nuclear Reactors
• JPL’s ATHLETE and JVA

PROJECT LEGACY Project Specifications – Lunar Orbit
• 1 Impact vehicle
• 2 Ferrying Landers for crew of 8
• XM2 Space Habitat
• 3 Com Sats (24/7 HD coverage)

MISSION ARCHITECTURE Project Manager: Trevor Jahn
Assistant Project Manager: Michael Young

MISSION ARCHITECTURE
Washington Series (2022-2023, 4 missions)
Testing and XM2 Phase
• Raising TRL of power/orbiters
• XM2 Delivered to CLO
• Moon Impact Mission for habitat foundation
Adams Series (2023-2029, 12 missions)
First Construction Phase
• Deliver crew to orbiter for shakedown
• Validate life-support systems and resources
• Landing first five habs, ISRU equipment, consumables, rovers
• Crew construction mission 1
Jefferson Series (2029-2031, 5 missions)
Second Construction Phase
• Landing remaining four habs
• Crew construction mission 2
TIMELINE, MISSION COUNT
Madison Series (2032-2035, 11 missions)
Crew and Resupply
• Deliver personal items and consumables
• Crew delivery and rotation via Orion
capsule
Monroe Series (2035+)
• Crew to cycler rendezvous
• Crew rotation

WASHINGTON SERIES
2022-2023, 4 MISSIONS
Project Manager: Trevor Jahn
Assistant Project Manager: Michael Young

2022-2023 WASHINGTON 1-4 Washington (2022-2023, 4 missions)
• 2022 Mission 1: Moon Impactor Mission Launch
• 2022 Mission 2: 3 Com Sats
• 2023 Mission 3: XM2 Space Hab, Orion Docking Mechanism, Nuclear
Reactor Test 1 (TRL 7 – 8)
• 2020 Mission 4: 3 Science Rovers, Nuclear Reactor Test 2 (TRL 8 – 9), 4
Science Probes

2022 WASHINGTON 1: MOON IMPACTOR MISSION LAUNCH
Crater Model
Excavated Mass 5202 [Mg]
Excavated Volume
Mass of Impactors 2.925 [Mg]
Volume of Impactors
Dr. Aldrin’s habitat layout
Dr. Aldrin Habitat Layout
Required Mass 12210 [Mg]
Required Volume
Crater Model

Requirement: 24-hour HD video communication with crew throughout mission
Communication Satellite Specifications:
• Number of satellites: 3
• Orbit altitude: 1,200 km
• Period: 4 hours
• Inclination: 88 degrees (polar orbit)
• Relays data from Earth to Moon or from Moon to Earth
Control Characteristics: - 3 axis stabilization - Using 3 reaction wheels - Desaturate about once every half year - Thrusters are used for small
maneuver changes
2022 WASHINGTON 2: COM SATS

2023 WASHINGTON 3: XM2
Purpose: A go-between from Earth
and the Moon Base
Dimensions based on Bigelow
Aerospace B330:
• Deployed Volume: 330 m3
• Deployed Mass: 20 Mg
• Power: TBD
• Lifespan: 20 years

2023 WASHINGTON 4: CARGO LANDER - For the 20 Mg lander, the total DeltaV to land from our 4500 km orbiting radius will be 2.5
km/s.
- Both landers are powered by 1 Aerojet Rocketdyne RL10B-2 Engine.
- 20 Mg Lander is 10.5 meters tall 7 meters wide at the top and 14 meters wide at the struts
Variant LHy Vol. (m3)
LHy Mass (Mg)
LOx. Vol. (m3)
LOx. Mass (Mg)
5 Mg 8.31 0.589 3.03 3.465
20 Mg 33.29 2.357 12.15 13.860
Hab and Lander in SLS Fairing
Cargo Lander with Extended Struts

2023 WASHINGTON 4: SCIENCE TRACEABILITY MATRIX
Science Objective Justification Measurement Objective
Measurement Requirement
Instrument Selected
Constrain Bulk Composition of
the Moon
Constrain age of SPA and Late
Heavy Bombardment (LHB) theory
Sample return from SPA to
analyze mineralogy and
volatile distributions
Age SPA melt sheet within 20 My ppb level –
measure high FeO areas
Drill, Sample, NSS, SuperCam, hand
lens
Example of one row from the STM. Full STM encompasses 3 goals.
The South Pole-Aitken Basin (SPA) has high Iron Oxide levels (yellow) that we want to sample.
SPA Basin

2023 WASHINGTON 4: TRAVERSE MAP FOR SCIENCE ROVER CABEUS CRATER TO SCHRÖDINGER BASIN = ~600 KM. TOTAL TRAVEL DISTANCE ~1200 KM

2023 WASHINGTON 4: SCIENCE PROBES
4 science probes sent to lunar surface for condition assessment
1 Launch from LEO to CLO using Falcon heavy
Science Instruments and Objectives: ● Determine inner structure of Moon ● Measure global heat flow ● Examine Moon’s magnetic field ● Seismic activity
Science Probe Overview:
Mass (kg) 149.6
Power (W) 157.6
Volume (m^3) 0.783
*Totals for one probe

2023 WASHINGTON 4: SCIENCE PROBES ACS Requirements: • Accommodate Precision Landing • Efficient use of fuel
ACS: • Use variable thrust main engines • Use Control Moment Gyroscope
(CMG) system Overall Propulsion System: Aerojet Rocketdyne R-6D (x3)
Mass (kg) Volume (m^3)
Propulsion 89.54 0.069
Total 149.6 0.783
* for one probe

ADAMS SERIES
2023-2029, 12 MISSIONS
Project Manager: Trevor Jahn
Assistant Project Manager: Michael Young

2023-2029 ADAMS 1 – 12 Adams Series (2023-2029, 12 missions)
• 2023 Mission 1: Crew of 2 to XM2 (1 week duration), docking test, and return to Earth
• 2025 Mission 2: Modular Rover / Attachments, 2 reactors, and ATHLETE
• 2025 Mission 3: Hab 1L (Living)
• 2026 Mission 4: Hab 2L (Living)
• 2026 Mission 5: Fuel Depot
• 2027 Mission 6: ISRU, 2 Reactors
• 2027 Mission 7: Hab 3R (Rec center)
• 2027 Mission 8: Hab 4R (Rec center)
• 2028 Mission 9: Hab 5W (Wast/Water)
• 2028 Mission 10: Ferrying Lander to XM2
• 2028 Mission 11: Ferrying Lander to lunar surface
• 2029 Mission 12: Crew of 2 to XM2, and 2 Crew to Surface (1 week): test systems

LUNAR SURFACE LOCATIONS
14.3 Km
2025 ADAMS 2: NUCLEAR POWER
SYSTEM
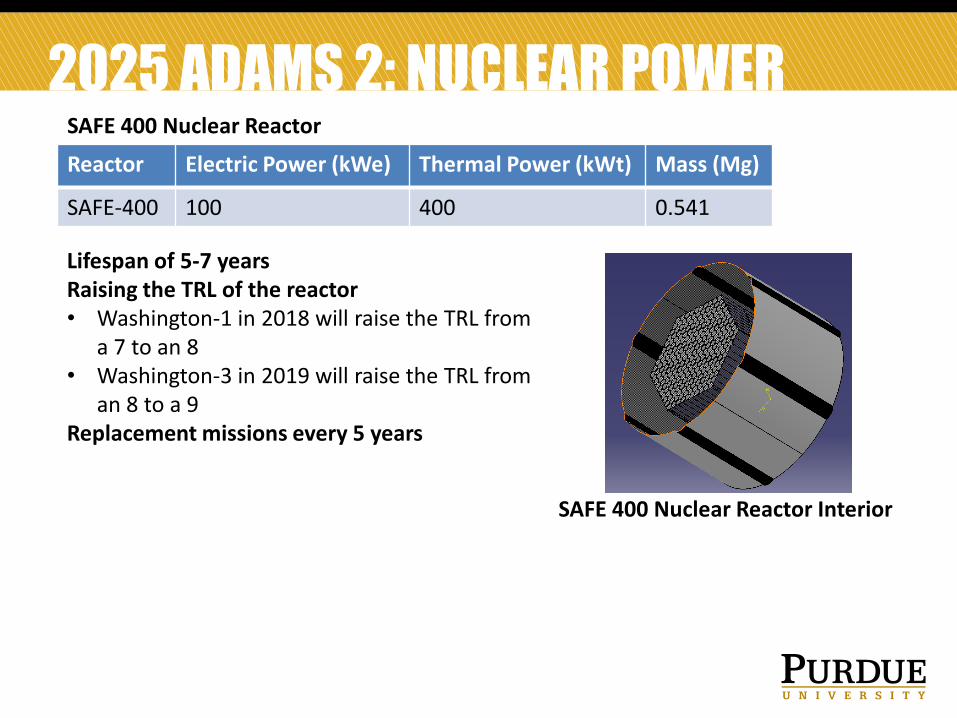
Reactor Electric Power (kWe) Thermal Power (kWt) Mass (Mg)
SAFE-400 100 400 0.541
Lifespan of 5-7 years Raising the TRL of the reactor • Washington-1 in 2018 will raise the TRL from
a 7 to an 8 • Washington-3 in 2019 will raise the TRL from
an 8 to a 9 Replacement missions every 5 years
SAFE 400 Nuclear Reactor
SAFE 400 Nuclear Reactor Interior

2025 ADAMS 2: UNIFIED ROVER SYSTEM Operation Parameter
Value
Max Speed 30 [km/h]
Cross country Speed
20 [km/h]
Range 200 [km]
Carrying Capacity
3.5 [Mg]
Science Bay: Volume: 17.08 [m3] Mass: 0.912 [Mg]
Fluid Storage Module: Volume: 3.80 [m3] Mass: 0.709 [Mg]
Rover Arms: Volume: 8.9x10-3 [m3] Mass: 0.021 [Mg/arm]

Scoop: Volume: 0.66 [m3] Mass: 1.987 [Mg/arm]
2025 ADAMS 2: UNIFIED ROVER SYSTEM
Universal Pallets
JVA Bed
JVA-01: Volume: 14 [m3] Mass: 1.2 [Mg] Power: 390 [W]

RADIATION
Radiation Type Unmitigated Dose Dose after Mitigation
Top Sides
Galactic Cosmic Rays 0.75-1.0 Sv 0.0255 Sv 0.031 Sv
Solar Cosmic Rays 80-300 Sv 0.330 mSv 0.271 mSv
Total 81 – 301 Sv 0.0565 Sv
Table 2: Habitat radiation dosage. Comparison of the unmitigated and mitigated dosage from the most harmful sources of radiation (over 2 years).
Mass: 11,200 Mg Regolith, 8 Mg bags, 22440 kg of water necessary Volume: 7,450 m3 Total Dose: 0.0565 Sv over 2 years
2 major sources of radiation on the moon:
• Galactic Cosmic Rays [1 Sv]
• Solar Proton Events [~150 Sv]

RADIATION SHIELDING
Habitat Radiation Mitigation Design. Cross section and top down views.
lower
Inter-hab connector
Lunar ground
level Water Tank
Reg. bags
ground
storage
GCR
SCR

REGOLITH BAGGING
Fill Process: 1) Roll bag
2) Catch opening
3) Fill
4) Cut perforations
5) Cinch
6) Drop
This system is one
of our rover pallets
which can moved
on/off our rover.
Bag Spool
Fill Tube
Spring loaded hook
[1]
[3]
[6] [5]
[4]

Leveraging current technology of
JPL’s ATHLETE (All Terrain Hex-
Limbed Extra-Terrestrial Explorer)
and modifying to fit requirements.
Linking Points
Cargo Lifting Wheels
2025 ADAMS 2: NASA’S ATHLETE

2025 – 2027 ADAMS 3 – 9: HABS 1 – 5
Hab 3R (Rec Center) Wally ball/Multipurpose Court
Hab 4R (Rec Center) Exercise Equipment
Hab 1L (Living) Residential Areas
Hab 2L (Living) Residential Areas
Hab 5W (Waste/Water) Water Reclamation

2026 ADAMS 5: FUEL DEPOT
• Location: PSR At mining site • Function: Processes water
into fuel/oxidizer • Mass (dry): 16.64Mg • Power: 300 Watts • Volume: 313.9m^3
LOX
Tank
LH2
Tank
H2O Tank
Heat
Exchanger
MLI
Insulation
Aluminum
Support 1
5
4
3 2
Tube # Service
1 Liquid Water to H2O
Tank
2 Gaseous Hydrogen to
LH2 Tank
3 Liquid Hydrogen output
line
4 Gaseous Oxygen to LOX
Tank
5 Liquid Oxygen output
line

2027 ADAMS 6: ISRU SYSTEM • Heats up regolith to sublimate out “ice material” • Cool gases to slowly separate components into
liquids • Expels waste regolith and “ice material” out of
the system • Holds important materials (CO2, CH4, H2O) to be
picked up by the fuel rover
Regolith tank
Mixture gas tank
CO2 tank H2O tank CH4 tank
Microwave
Vent lines
Vacuum pump
Solenoid valves

2027 ADAMS 6: ISRU CONCEPT PATENT INFO
• Edwin C. Ethridge ([email protected])
• William F. Kaukler ([email protected])
• Capable of sublimating 10cm of water per minute (2D application)
• We plan to modify and scale up this version
SYSTEM REQUIREMENTS
• Microwave
• Boring cylinder (auger)
• Cold trap (collection chamber)
CHANGES FROM PREVIOUS SYSTEM
• Doesn’t require moving regolith
• Doesn’t require vacuum pumps
• Only has 1 collection tank
• Doesn’t require any separation of the volatiles
• Decreases IMLEO

JEFFERSON SERIES
2029-2031, 5 MISSIONS
Project Manager: Trevor Jahn
Assistant Project Manager: Michael Young

2029-2031 JEFFERSON 1-5 Jefferson Series (2029-2031, 5 missions)
• 2029 Mission 1: Hab 6LL (Laboratory), Spacesuits, Laboratory Supplies
• 2030 Mission 2: Hab 7M (Medical), Medical Hab Supplies
• 2030 Mission 3: Hab 8A (Aeroponics), Aeroponics equipment
• 2031 Mission 4: Hab 9F (Food Prep/Storage)
• 2031 Mission 5: Crew of 2 to XM2, and 2 Crew to Surface (1 week): test
systems

2029 – 2031 JEFFERSON 1 – 4: HABS 6 – 9
Hab 8A (Aeroponics) Aeroponics Facility
Hab 6LL (Laboratory) Science Lab
Hab 9F (Food Prep/Storage) Food Storage and Preperation
Hab 7M (Medical) Medical Research

MADISON SERIES
2032-2035, 11 MISSIONS
Project Manager: Trevor Jahn
Assistant Project Manager: Michael Young
2032-2035 MADISON 1-11: FOOD/WATER/CREW
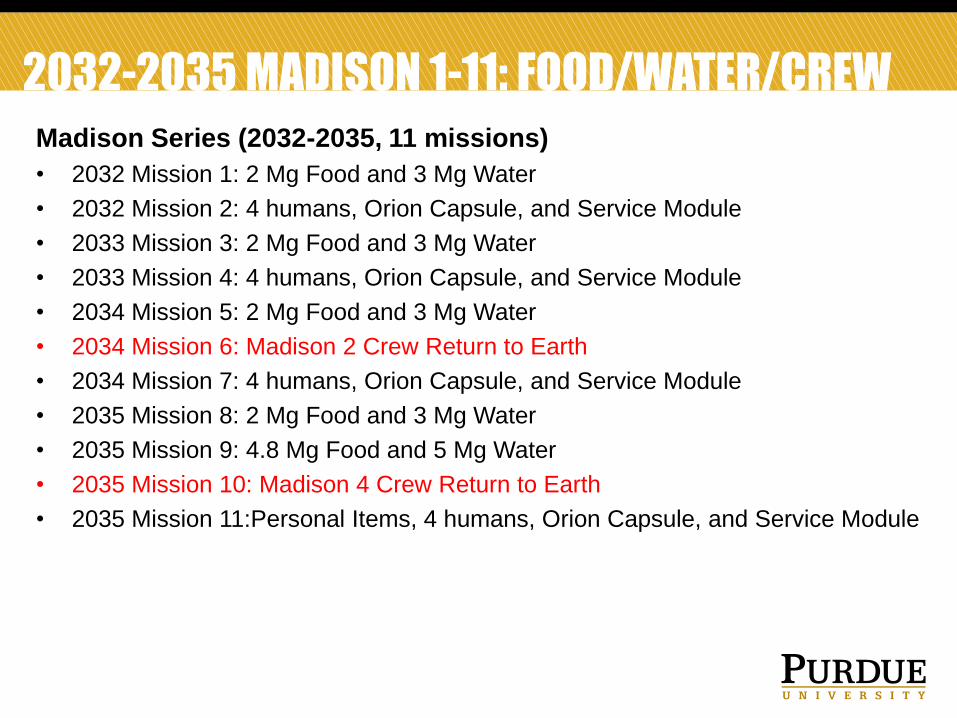
Madison Series (2032-2035, 11 missions)
• 2032 Mission 1: 2 Mg Food and 3 Mg Water
• 2032 Mission 2: 4 humans, Orion Capsule, and Service Module
• 2033 Mission 3: 2 Mg Food and 3 Mg Water
• 2033 Mission 4: 4 humans, Orion Capsule, and Service Module
• 2034 Mission 5: 2 Mg Food and 3 Mg Water
• 2034 Mission 6: Madison 2 Crew Return to Earth
• 2034 Mission 7: 4 humans, Orion Capsule, and Service Module
• 2035 Mission 8: 2 Mg Food and 3 Mg Water
• 2035 Mission 9: 4.8 Mg Food and 5 Mg Water
• 2035 Mission 10: Madison 4 Crew Return to Earth
• 2035 Mission 11:Personal Items, 4 humans, Orion Capsule, and Service Module

MONROE SERIES
2035+
Project Manager: Trevor Jahn
Assistant Project Manager: Michael Young

2035 MONROE 1: FERRY TO CYCLER Objective: Design ferry to mars cycler to carry payload of 20Mg with safety option Reasoning: To make the hyperbolic rendezvous as safe as possible.
EUS, Exploration Upper Stage • Provide delta-v required to make
Hohmann transfer & initial stage of hyperbolic transfer
Booster • Provide delta-v required after EUS burn • Continue and finish hyperbolic transfer and perform approach maneuver
Service Module • Capable of doing same maneuver as
the Booster stage • Only used in Booster failure
Service Module • 20Mg, carries 4 crews • Has docking thruster and heat shield
FEMAC(Ferry to Mars Cycler) stage configuration:

2035 MONROE 1: FERRY TO CYCLER Maneuver breakdown:
1. EUS burn: Hohmann transfer to 1000 km altitude – 0.32 km/s
2. EUS burn: Transfer to high energy ellipse – 2.09km/s
3. EUS jettison
4. Booster Burn: Inject into hyperbolic departure orbit – 1.69 km/s
5. Booster Burn: Trajectory correction maneuver – 0.066 km/s
6. Booster and Service Module jettison
7. Ferry RCS burn: Rendezvous/dock with cycler – 0.0300 km/s
*Booster burn can be also done by service module in emergency case
Launch Vehicle SLS Block 2
IMLEO 175.34 Mg
IVLEO 1040 m^3
Total Delta-V from LEO
4.1941 km/s
Time of Flight 46.11 hr
Basic specification of the FEMAC Configuration allows us to achieve; • Crew Survival rate: 96.96% • Mission Success rate: 93.96% Abort Options • Safe return 0.7 hr (2039) to 2.4 hr (2035)
after insertion • Prevent escape 2.6 hr (2039) to 84 hr
(2035) after insertion

APPENDIX
Project Manager: Trevor Jahn
Assistant Project Manager: Michael Young

APPENDIX: JVA-01 DESIGN Objective: Design mechanism to attach and remove rover attachments
Reasoning: Shirt-sleeve pressurized environment and radiation exposure prevents astronauts from attaching and detaching the rover attachments
• Miniaturization and redesign of
ATHLETE (1/4th scale)
• Universal pallet design for ease of
addition and removal
• Pallet will attach to rover
• Slides on rail
• Universal pallet design for ease of
addition and removal
Detailed design for JVA bed:
* CAD design and concept art by Amit Soni
Universal Pallets
Part Material Mass (Mg) Volume (m3)
Slide Bar (x2) Al 2090 0.1023 3.542*10-2
Slant Torsion Bar (x2)
Al 2090 0.01872 3.542*10-2
Torsion Bar Al 2090 0.008320 2.879*10-3
Pallet Al 2090 0.4483 0.1551
Total ---- 0.5776 0.2289
JVA Bed

APPENDIX: METHOD COMPARISON What is needed?
• Need to find the most efficient method to move regolith for hab construction
• Need a construction schedule to reflect the recommended method
Assumptions:
• Time numbers are assuming rover is constantly moving regolith or charging
• Full list of assumptions is located on slide 47
Rectangle Dig Only
Rectangle Impact
Aldrin Dig Only
Aldrin Impact
Mass (Mg) 3676.8 3468.4 3542.6 3634.3
Power Required (kW) 1857.0 1542.6 1789.2 1101.3
Volume (m^3) 2451.2 2312.3 2361.8 2422.9
Excavation Time (days) 291.36 222.20 283.91 176.46
Fill in Time (days) 117.18 117.18 109.72 65.833
Recommendation: We use the impactors with Dr. Aldrin’s layout

APPENDIX: CONSTRUCTION SCHEDULE The Procedure
1. The impactors hit
2. Rovers fill in the craters to create pits
3. The first hab lands and is positioned in the pit closest to landing site
4. Rover fills in regolith around hab
5. First connector is positioned and attached
6. Regolith bag wall is built between pit and landing site
7. Repeat steps 3 – 5 for other two habs and connectors in cluster
8. Repeat steps 3 - 7 for the other 2 hab clusters
9. Position and attach the intermediate connectors
10.Create the remainder of the regolith bag wall
Figure 1: First Hab Cluster
Figure 2: Full Layout

APPENDIX: CONSTRUCTION SCHEDULE
The rover:
• The ramps giving access to the pits all have an incline of 16°
• Volume of rover scoop: 0.66 m^3
• Power for a low work trip: 300 W
• Power for a high work trip: 500 W
• Battery charge time: 28.8 hrs
• Battery Life: 10000 W and 24 hrs
The habs:
• 7.4 m diameter
• Short connectors are 0.5 m long
• Habs are buried 2.7m
The Moon
• Regolith density: 1500 kg/m^3
• Rectangle crater is 32 x 32 x 3.11 m initially with 4 m long sloping walls
• Aldrin crater has diameter of 20 m that slopes into a diameter of 5 m over a depth of 4.17 m
LIST OF ASSUMPTIONS/GATHERED VALUES
Figure 4: One of Three Pits for Dr. Aldrin’s Hab Layout
Figure 3: Pit for Rectangular Hab Layout

APPENDIX: VEHICLE CONTROLS AFFECTING FORCES AND CONTROL METHODS
Vehicle Control Method Mass [Mg] Power [W] Volume [m3 ]
Ferrying Lander
CMG/Reaction Wheels
0.292 356 1.627
Ferry to Cycler
CMG 0.544 552 3.240
XM CMG/Thrusters 0.010 200 1.000
Environmental forces:
• Gravitational forces
• Reflected solar radiation
• Solar radiation
• Gravity gradient
• Particle collision forces
• Magnetic field force
Nonenvironmental forces
• Nonpropulsive mass expulsion force
• Damping and structural flexing
• Propulsive maneuvers
• Fuel sloshing
• Other non-environmental movement

APPENDIX: TRAJECTORY OVERVIEW
High Altitude Retrograde Orbit
Trans-Lunar Injection Orbit
Impactor Vehicle Separation and Trajectories
Moon’s Velocity

APPENDIX: VEHICLE MASS/VOLUME BREAKDOWN
IMPACTOR VEHICLE Quantity: 3
Payload Mass 0.975 Mg
Fuel Mass 1.220 Mg
Inert Mass 0.387 Mg
ISP 320 s
2.0 km/s
Unloaded Mass 1.362 Mg
Loaded Mass 2.582 Mg
Volume
TLI STAGE Quantity: 1
Payload Mass 7.747 Mg
Fuel Mass 5.500 Mg
Inert Mass 1.912 Mg
ISP 320 s
1.314 km/s
Unloaded Mass 9.659 Mg
Loaded Mass 14.71 Mg
Volume
IMLEO: 14.71 Mg

APPENDIX: IMPACT TRAJECTORY
FINDER PROGRAM OUTPUT

APPENDIX: IMPACTING MINING SITE
Recommendation: Mine/dig the mining site
Area under the impact site will heat to > 373 K
Assuming the first 2 meters is removed: • 9.424 m2 of floor is exposed • Next ~0.75 m is heated to > 373 K • Rocks are not melted, but volatiles will evaporate
Objective: Determine whether it is possible to excavate material from mining site Reasoning: We want to minimize digging by rovers

APPENDIX: IMPACTOR AND CRATER PARAMETERS
Individual Impactor Parameters
Number of impactors: 4
Mass: 975 kg
Density: 2700 kg m-3
Volume: 0.36 m-3
Velocity: 4600 m s-1
Impact angle: 40°
Individual Crater Properties
Diameter: 20.67m
Depth: 4.17 m
Volume: 1,156 m3
Total IMLEO: 12.104 Mg See Jay Millane’s slides from 2/25/16

APPENDIX: ISALE MATERIAL FILE #ISMAT ---------------------------------------------------------------- MATNAME Material name : crust__ : aluminu EOSNAME EOS name : miesand : aluminu EOSTYPE EOS type : tillo : tillo STRMOD Strength model : DRPR : ROCK DILMOD Dilatancy model : ALPHAPT : ALPHAPT DAMMOD Damage model : IVANOV : IVANOV ACFL Acoustic fluidisation : BLOCK : BLOCK PORMOD Porosity model : WUNNEMA : NONE THSOFT Thermal softening : OHNAKA : OHNAKA LDWEAK Low density weakening : POLY : POLY ------------------------------------------------------------------------------ POIS pois : 2.5000D-01 : 3.000D-01 ------------------------------------------------------------------------------ TMELT0 tmelt0 : 1.5130D+03 : 1.673D+03 CHEAT C_heat : 5.9000D+02 : 1.D+03 TFRAC tfrac : 1.2000D+00 : 1.2D+00 ASIMON a_simon : 1.8400D+09 : 6.D+09 CSIMON c_simon : 7.2700D+00 : 3.D+00 ------------------------------------------------------------------------------ YDAM0 ydam0 (ycoh) : 1.0000D+05 : 1.D+04 FRICDAM fricdam : 7.1000D-01 : 8.D-01 YLIMDAM ylimdam : 2.4700D+09 : 2.D+09 ---------------------------------------------------------------------------- YINT0 yint0 : 3.1900D+07 : 1.D+07 FRICINT fricint : 1.1000D+00 : 1.1D+00 YLIMINT ylimint : 2.4700D+09 : 2.5D+09 ------------------------------------------------------------------------------ IVANOV_A Damage parameter : 1.0000D-04 : 1.0000D-04 IVANOV_B Damage parameter : 1.0000D-11 : 1.0000D-11 IVANOV_C Damage parameter : 3.0000D+08 : 3.0000D+08 ------------------------------------------------------------------------------ GAMETA gam_eta : 2.0000D-02 : 8.D-03 GAMBETA gam_beta : 3.0000D+02 : 1.15D+02 ------------------------------------------------------------------------------ ALPHACRIT Zero dil angle distension : 1.2D0 : 1.2D0 DILATCOEF Max. dil angle : 0.0450 : 0.045D0 DILATPLIM Zero dil angle pressure : 2.0D8 : 2.0D8 DILATFRIC dam dist fric : 0.4D0 : 0.4D0 ------------------------------------------------------------------------------ ALPHA0 Initial porosity : 1.0730D+0 : 0.0000D+0 EPSE0 Elastic threshold : -1.0000D-2 : 0.0000D+0 ALPHAX Transition : 1.0898D+0 : 0.0000D+0 KAPPA Exp coefficient : 0.9800D+0 : 0.0000D+0 CHI Sound speed ratio : 1.0000D+0 : 0.0000D+0 ------------------------------------------------------------------------------- <<END

APPENDIX: METHOD COMPARISON What is needed?
• Need to find the most efficient method to move regolith for hab construction
• Need a construction schedule to reflect the recommended method
Assumptions:
• Time numbers are assuming rover is constantly moving regolith or charging
• More assumptions are located in backup slide
Rectangle Dig Only
Rectangle Impact
Aldrin Dig Only
Aldrin Impact
Mass (Mg) 4638.8 4476.4 4347.3 4845.8
Power Required (kW) 2342.8 1960.4 2195.6 1468.4
Volume (m^3) 3092.6 2984.3 2898.2 3230.5
Excavation Time (days) 373.84 289.69 357.64 247.82
Fill in Time (days) 141.59 141.59 125.39 75.235
Recommendation: We use the impactors with Dr. Aldrin’s layout
Table 1: Comparison of Mass, Power, Volume and Time for Regolith Moving

APPENDIX: NUCLEAR POWER ESTIMATES CHARGED SPHERES AS A POTENTIAL METHOD OF RADIATION SHIELDING
Power Estimates for Charged Spheres
• Chose a sphere radius of 1 m
• To charge 35 spheres we need 0.0131 kWh of energy
• 35 spheres would then take up a volume of 146.6077 m3
• Spheres must be 50 MV each

APPENDIX: COMMUNICATIONS MAP EARTH – MOON SYSTEM
Objective: To create a communications map
Reasoning: To visually understand how the communication system will be positioned and operated

APPENDIX: COMMUNICATIONS MAP MOON SYSTEM

APPENDIX: COMMUNICATIONS
Vehicle Antenna / Location Mass [Mg] Power [W] Diameter [m]
Ferrying Lander 0.003 25 0.1313
Cargo Lander 0.003 8 0.1875
Ferry-Cycler 0.003 65 1.22
ComSat (to Earth, x3) 0.047 55 1.3125
Comsat (to Moon, x3) 0.047 18 0.0438
Pressurized Rover (X-band) 0.001 2 0.7698
Pressurized Rover (HGA) 0.001 1 1.3125
Moon Base 1.500 25 3.00
Earth Base (x4) 4.700 100 9.4
XM2 0.047 50 0.0875

APPENDIX: CARGO LANDER
-10 and 20 Mg cargo landers are both powered by RL10B-2 Hydrolox Engines
-20 Mg lander and payload has a total mass of 45 Mg: 3.3 Mg inert mass, 20 Mg payload,
and 21.7 Mg of propellant. The volume of the fuel tank is 44.55 cubic meters while the
volume of the oxidizer tank is 16.25 cubic meters.
-The 10 Mg lander and payload has a total mass of 25 Mg: 2.9 Mg inert mass, 10 Mg
payload, and 12.1 Mg of propellant. The volume of the fuel tank is 24.84 cubic meters
while the volume of the oxidizer tank is 9.06 cubic meters.
- For the 20 Mg lander, the landing struts require an outer radius of 0.15m, an inner radius
of 0.13m, a total strut mass of 112.6 kg, and a volume of 1.2 m^3
- For the 10 Mg lander, the landing struts require an outer radius of 0.15m, an inner radius
of 0.145m, a total strut mass of 29.6 kg, and a volume of 1.2 m^3
- For the 20 Mg lander, the total DeltaV to land from our 4500 km orbiting radius will be
2.8031 km/s. This will include a 0.2761 km/s Descent Orbit Insertion, a 2.183 km/s
Braking and Rotation phase, and a .344 km/s Vertical Descent phase.

APPENDIX: UNIFIED ROVER SYSTEM FOR ASTRONAUTS
Operation Paramete
r
Value
Max Speed
30 [kph]
Cross country Speed
20 [kph]
Range 200 [km]
Height 2.765 [m]
Length 6.9 [m]
Width 2.6 [m]
Carrying Capacity
3.5 [Mg]

APPENDIX: SCIENCE ROVER ARM DESIGN • Powered by geared motors motors for movement.
• 6 degrees of freedom
• 1.8 m fully extended
• Attachment barrel for multiple science tools
• Camera, drill, scoop, claw, etc.
• Can attach to multiple attachment points on rover with electrical access.
*Science Arms CAD designs by Amit Soni
Shoulder
Attachment Barrel
Arm
Wrist
Geared motor
(x4)
Part Material Qty. Mass (kg) Volume (m3)
Shoulder Al 2090 1 6.72 2.59*10-3
Arm Zoltek™ PX 35 2 7.25 4.01*10-3
Wrist Zoltek™ PX 35 1 0.45 2.46*10-4
Barrel Al 2090 1 2.64 1.02*10-3
Geared Motor ---- 4 2 7.32*10-4
Holder Al 2090 1 0.4 1.59*10-4
Holder Motor ---- 1 1 1.12*10-4
Bolts A286 Steel 4 0.72 1.0*10-4
Mass: 0.021 Mg/arm
Volume: 8.9x10-3 m3
Power: 10W
Recommendation: Scale up science arm design for industrial applications.

APPENDIX: ROVER ATTACHMENTS
OTHER ATTACHMENTS PLANNED: SCOOP SHOVEL, MINING IMPLEMENT, BULLDOZER BLADE
Fluid Storage Module: Tank Volume: 3.80 [m3] Tank Mass: 0.709 [Mg]
Science Bay: Volume: 17.08 [m3] Mass: 0.912 [Mg]

APPENDIX: FERRYING LANDER MISSION PARAMETERS
Maneuver ΔV (km/s) Number Required
Takeoff 1.962 1
Circularizing Burn to Enter CLO
0.231 1
15o Plane Change 0.271 2
Descent Hohmann and Landing
2.459 1
Total 5.194
Component TOF
Takeoff 6.7 min
Hohmann to CLO 2 hours, 19 min
Hohmann from CLO 2 hours, 19 min
Landing 13 min
Total 4 hours, 58 min
Purpose: To carry crew members between the Lunar Surface and the XM-2 module orbiting in CLO. To fulfill its mission it must be able to perform the following maneuvers.

APPENDIX: RISK TOP MISSION RISKS
Risk Risk Ranks
Launch Failure 1
Radiation 2
Hyperbolic Rendezvous
3
Communications Failure
4
Pressurized Rover Failure
5
ISRU Failure 6
Fuel Depot Failure 7
XM Failure 8
Crewed Lander Failure
9
1 2 3
4 5 6 7 8 9
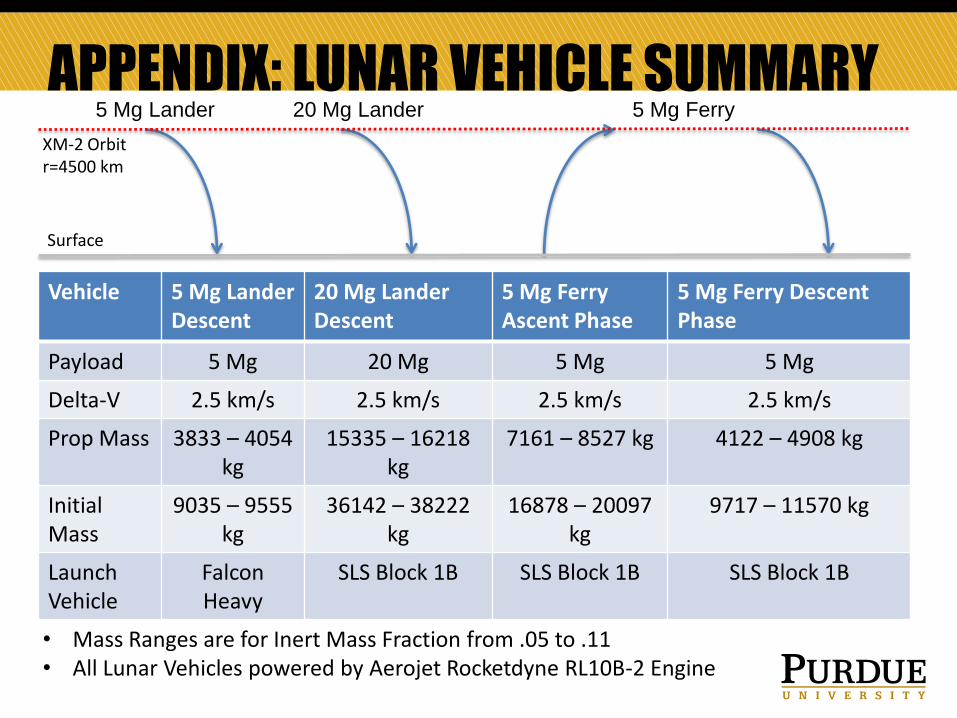
APPENDIX: LUNAR VEHICLE SUMMARY 5 Mg Lander
20 Mg Lander
5 Mg Ferry
Vehicle 5 Mg Lander Descent
20 Mg Lander Descent
5 Mg Ferry Ascent Phase
5 Mg Ferry Descent Phase
Payload 5 Mg 20 Mg 5 Mg 5 Mg
Delta-V 2.5 km/s 2.5 km/s 2.5 km/s 2.5 km/s
Prop Mass 3833 – 4054 kg
15335 – 16218 kg
7161 – 8527 kg 4122 – 4908 kg
Initial Mass
9035 – 9555 kg
36142 – 38222 kg
16878 – 20097 kg
9717 – 11570 kg
Launch Vehicle
Falcon Heavy
SLS Block 1B SLS Block 1B SLS Block 1B
Surface
XM-2 Orbit r=4500 km
• Mass Ranges are for Inert Mass Fraction from .05 to .11 • All Lunar Vehicles powered by Aerojet Rocketdyne RL10B-2 Engine
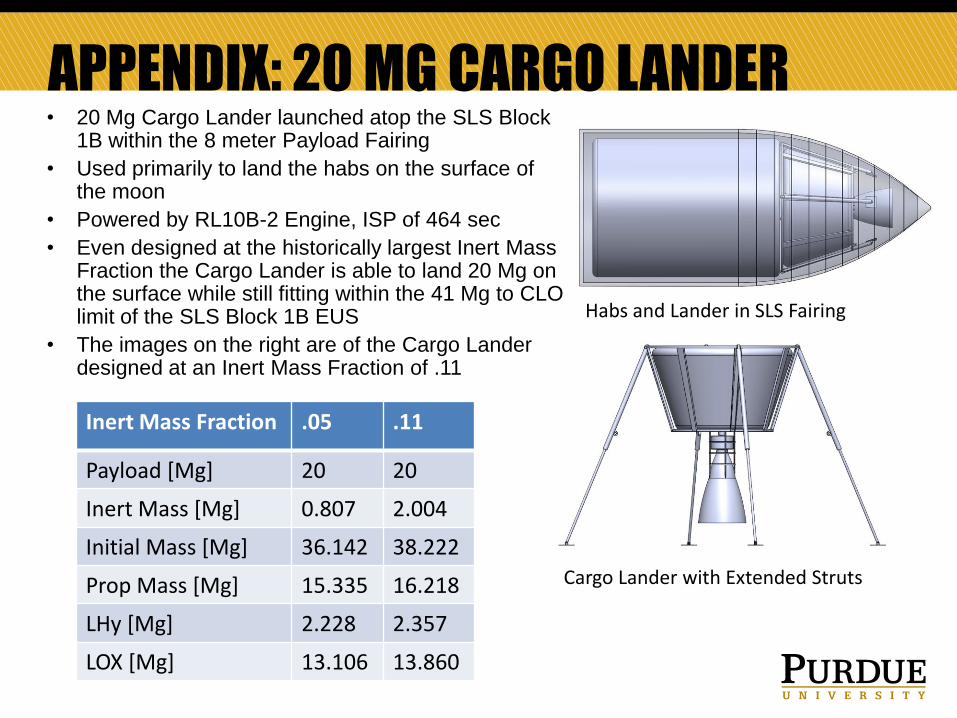
APPENDIX: 20 MG CARGO LANDER • 20 Mg Cargo Lander launched atop the SLS Block
1B within the 8 meter Payload Fairing
• Used primarily to land the habs on the surface of the moon
• Powered by RL10B-2 Engine, ISP of 464 sec
• Even designed at the historically largest Inert Mass Fraction the Cargo Lander is able to land 20 Mg on the surface while still fitting within the 41 Mg to CLO limit of the SLS Block 1B EUS
• The images on the right are of the Cargo Lander designed at an Inert Mass Fraction of .11
Habs and Lander in SLS Fairing
Cargo Lander with Extended Struts
Inert Mass Fraction .05 .11
Payload [Mg] 20 20
Inert Mass [Mg] 0.807 2.004
Initial Mass [Mg] 36.142 38.222
Prop Mass [Mg] 15.335 16.218
LHy [Mg] 2.228 2.357
LOX [Mg] 13.106 13.860

APPENDIX: FERRYING LANDER PROPULSION PARAMETERS
Ferrying Lander Propulsion System
Propellant Choice Liquid Hydrogen Liquid Oxygen
Engine RL10B2
Payload Mass 5 Mg
Inert Mass 0.9-2.6 Mg
Hydrogen Mass 1.8-2.4Mg
Hydrogen Volume 25.6-33.2m3
LOX Mass 10.7-13.8Mg
LOX Volume 9.3-12.1 m3
Total Mass 18.4-23.8 Mg
# of Engines 1
OX PUMP FUEL PUMP
FUEL TURBINE OX TURBINE
BELL NOZZLE

APPENDIX: ISRU PATENT INFO
65
http://arc.aiaa.org/doi/pdf/10.2514/6.2012-801 https://patents.google.com/patent/US8357884B1/en

APPENDIX: ISRU PATENT INFO
66
http://arc.aiaa.org/doi/pdf/10.2514/6.2012-801 https://patents.google.com/patent/US8357884B1/en

APPENDIX: ISRU PATENT INFO
FIG. 1 illustrates a side view of an
exemplary embodiment of volatile
extraction and collection device 100 for
extraction of volatiles from soil using
microwaves. In the embodiment shown,
volatile extraction and collection
device 100 is comprised of microwave
source 10, microwave delivery
component 20, collection chamber 30,
boring component 50, and wave dipole
antenna 45.
67
http://arc.aiaa.org/doi/pdf/10.2514/6.2012-801 https://patents.google.com/patent/US8357884B1/en

APPENDIX: LUNAR BASE POWER CONSUMPTION
At the beginning of the Madison series, steady operation of the lunar base will require a total of 154 kW.