xv comrob 2013, facultad de … · ... tambi´ ´en se muestra un ... en este art´ıculo se...
TRANSCRIPT
XV COMROB 2013, FACULTAD DE ELECTROMECANICA, UNIVERSIDAD DE COLIMA, MANZANILLO, COLIMA, 1-4 OCTUBRE 2013 1
Analisis y diseno de un prototipo virtual de tipoexoesqueleto para rehabilitacion de codo
Mauro A. Montenegro-Meza, M. Alejandro Lugo-Villeda, J. Vıctor Nunez-Nalda,R. Karina Gonzalez-Trigueros, Ulises Zaldivar-Colado
Resumen—En el presente artıculo se muestra el analisis ydiseno de un robot de tipo exoesqueleto para rehabilitacionmotriz de codo izquierdo. El diseno del exoesqueleto esta basadoprincipalmente en cosideraciones antropomorficas y clınicas.Las consideraciones antropomorficas consisten en el analisis demovimiento biomecanico y su representacion cinematica articular,la cual, fue analizada mediante tecnicas de robotica, tambien semuestra un estudio de antropometrıa obtenida de un grupo depersonas de la poblacion local. A traves del modelo cinematicodel miembro superior se propone el modelo cinematico delexoesqueleto con el objetivo de reproducir los movimientos y elespacio de trabajo de la extremidad superior. Las consideracionesclınicas contemplan ejercicios terapeuticos activos en el codocon movimientos pasivos en hombro y antebrazo. Se presenta elmodelo en CAD el cual representa principalmente la movilidaddel exoesqueleto como parte importante. Se presentan resultadosy conclusiones.
Palabras clave. Diseno de robots, Rehabilitacion robotica,Robotica medica, Exoesqueleto de miembro superior.
I. INTRODUCCION
En Mexico, al ano 2010, 5.7 millones de personas padecıande alguna discapacidad, esto representaba el 5.1% de lapoblacion total (el 49% son hombres y el 51 % son mujeres).Ahora bien, la discapacidad, el instituto nacional de estadısticay geografıa (INEGI) la clasifica con base en las limitacionespara realizar actividades, tales como caminar o moverse, ver,escuchar, hablar o comunicarse, de atencion y aprendizaje, deautocuidado o bien tener alguna limitacion mental, de estas, ladiscapacidad con mayor incidencia es la de caminar o moverse,de la poblacion total con discapacidad. La discapacidad sedivide en las extremidades inferiores, extremidades superiores,en tronco, cuello y cabeza. En el presente trabajo se hacereferencia a la discapacidad en miembro superior, en codoespecıficamente, que considera afecciones en la manipulacionde objetos y la coordinacion de movimientos [1].
La articulacion del codo es la articulacion pivote del miem-bro superior, situada entre el hombro y la mano. El rangonormal de movimiento del codo es de 0 a 135 grados demodo activo, y de 0 a 150 grados pasivamente. Mucha de esta
Mauro A. Montenegro-Meza, M. Alejandro Lugo-Villeda y J. Vıctor Nunez-Nalda del departamento de Ing. Mecatronica de la Universidad Politecnicade Sinaloa. (e-mail: [email protected], [email protected] [email protected])
R. Karina Gonzalez-Trigueros del departamento de Ing. en Informatica dela Universidad Politecnica de Sinaloa. (e-mail: [email protected])
Ulises Zaldivar Colado, de la Universidad Autonoma de Sinaloa (e-mail:[email protected]).
movilidad es necesaria para las actividades normales de la vidadiaria. Sin embargo existen diversas lesiones o patologıas quepueden deteriorar la capacidad de la persona para producirla fuerza necesaria para realizar alguna actividad. Fracturas,luxaciones, contusiones, quemaduras, problemas patologicos oneurologicos, son algunas de las causas o afecciones que lim-itan la capacidad de produccion de fuerza, y por consecuenciala falta de movilidad. Para la recuperacion motriz, se empleanejercicios de rehabilitacion especıficos para el fortalecimientomuscular y el mejoramiento de la coordinacion motriz [2][3].
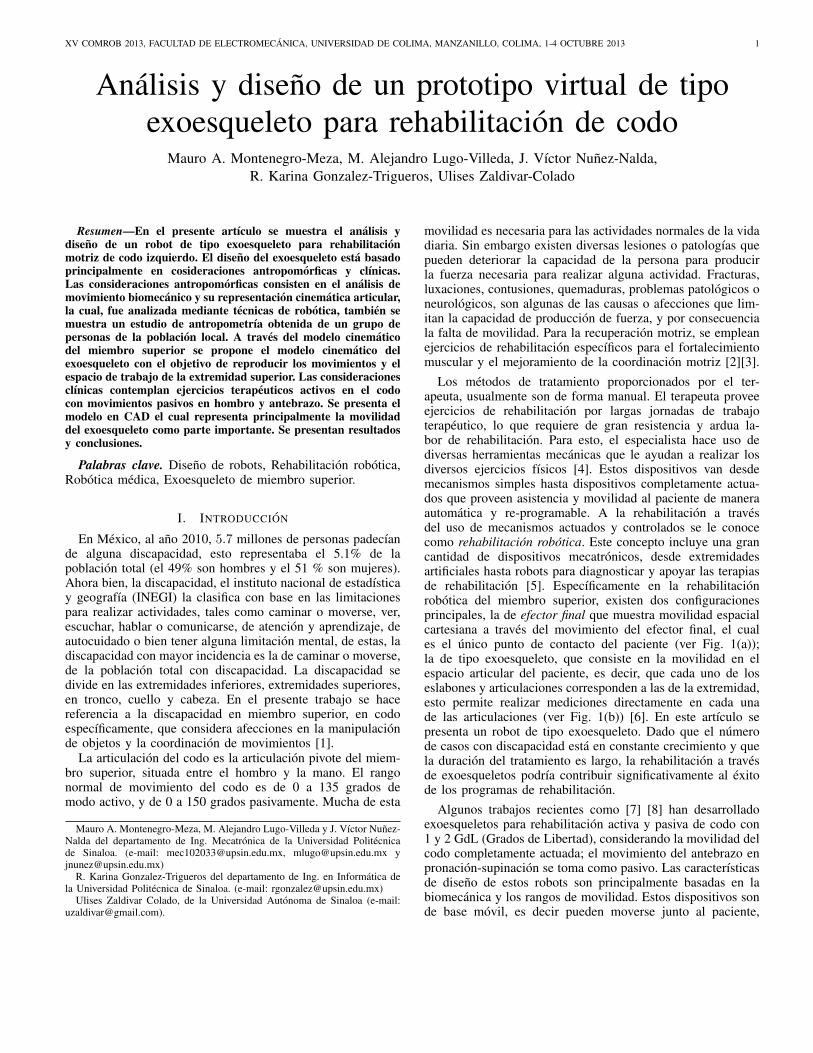
Los metodos de tratamiento proporcionados por el ter-apeuta, usualmente son de forma manual. El terapeuta proveeejercicios de rehabilitacion por largas jornadas de trabajoterapeutico, lo que requiere de gran resistencia y ardua la-bor de rehabilitacion. Para esto, el especialista hace uso dediversas herramientas mecanicas que le ayudan a realizar losdiversos ejercicios fısicos [4]. Estos dispositivos van desdemecanismos simples hasta dispositivos completamente actua-dos que proveen asistencia y movilidad al paciente de maneraautomatica y re-programable. A la rehabilitacion a travesdel uso de mecanismos actuados y controlados se le conocecomo rehabilitacion robotica. Este concepto incluye una grancantidad de dispositivos mecatronicos, desde extremidadesartificiales hasta robots para diagnosticar y apoyar las terapiasde rehabilitacion [5]. Especıficamente en la rehabilitacionrobotica del miembro superior, existen dos configuracionesprincipales, la de efector final que muestra movilidad espacialcartesiana a traves del movimiento del efector final, el cuales el unico punto de contacto del paciente (ver Fig. 1(a));la de tipo exoesqueleto, que consiste en la movilidad en elespacio articular del paciente, es decir, que cada uno de loseslabones y articulaciones corresponden a las de la extremidad,esto permite realizar mediciones directamente en cada unade las articulaciones (ver Fig. 1(b)) [6]. En este artıculo sepresenta un robot de tipo exoesqueleto. Dado que el numerode casos con discapacidad esta en constante crecimiento y quela duracion del tratamiento es largo, la rehabilitacion a travesde exoesqueletos podrıa contribuir significativamente al exitode los programas de rehabilitacion.
Algunos trabajos recientes como [7] [8] han desarrolladoexoesqueletos para rehabilitacion activa y pasiva de codo con1 y 2 GdL (Grados de Libertad), considerando la movilidad delcodo completamente actuada; el movimiento del antebrazo enpronacion-supinacion se toma como pasivo. Las caracterısticasde diseno de estos robots son principalmente basadas en labiomecanica y los rangos de movilidad. Estos dispositivos sonde base movil, es decir pueden moverse junto al paciente,
XV COMROB 2013, FACULTAD DE ELECTROMECANICA, UNIVERSIDAD DE COLIMA, MANZANILLO, COLIMA, 1-4 OCTUBRE 2013 2
(a) (b)
Fig. 1. Configuraciones de robots para rehabilitacion (a) De efector final (b)Exoesqueleto de base fija.
a diferencia de [9] y [10] que muestran exoesqueletos de2 GdL y 1 GdL respectivamente, ambos trabajan directa-mente en el codo para aplicacion de ejercicios activos, ambosexoesqueletos son de base fija. Uno de los exoesqueletosmas avanzados para rehabilitacion de codo es presentado por[11], este exoesqueleto presenta un modelo ergonomico ensu diseno, ademas de una interaccion confortable para elpaciente. Con sus 4 GdL, el exoesqueleto puede rotar en losplanos frontal y horizontal con la finalidad de tener una mayorflexibilidad en los movimientos del paciente durante la sesionde rehabilitacion.
En este artıculo se presenta el diseno de un exoesqueletopara rehabilitacion de codo de 3 GdL, movimiento de flexion-extension de hombro pasivo, movimiento de flexion-extensionde codo activo y el movimiento de pronacion-supinacionpasivo. Las consideraciones del diseno se basan en criteriosclınicos y antropomorficos. Primero se realiza un analisisanatomico y biomecanico del hombro, codo y antebrazo conla finalidad de distinguir las partes principales que lo com-ponen y establecer la movilidad articular. Posteriormente serealiza un analisis cinematico de la extremidad con el cual seestablecen las bases de los parametros de diseno, considerandola antropometrıa humana y las restricciones articulares. Final-mente se presentan los resultados del diseno de un prototipovirtual y conclusiones.
II. ANALISIS ANATOMICO DEL MIEMBRO SUPERIOR:HOMBRO, CODO Y ANTEBRAZO
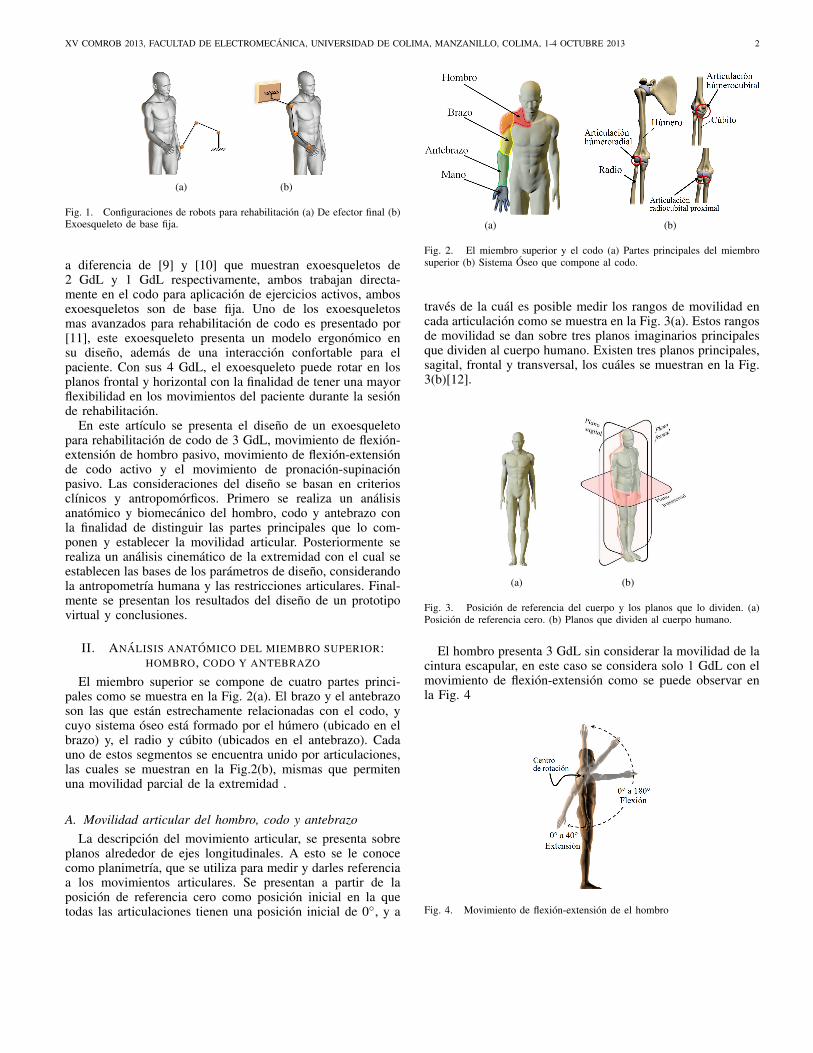
El miembro superior se compone de cuatro partes princi-pales como se muestra en la Fig. 2(a). El brazo y el antebrazoson las que estan estrechamente relacionadas con el codo, ycuyo sistema oseo esta formado por el humero (ubicado en elbrazo) y, el radio y cubito (ubicados en el antebrazo). Cadauno de estos segmentos se encuentra unido por articulaciones,las cuales se muestran en la Fig.2(b), mismas que permitenuna movilidad parcial de la extremidad .
A. Movilidad articular del hombro, codo y antebrazoLa descripcion del movimiento articular, se presenta sobre
planos alrededor de ejes longitudinales. A esto se le conocecomo planimetrıa, que se utiliza para medir y darles referenciaa los movimientos articulares. Se presentan a partir de laposicion de referencia cero como posicion inicial en la quetodas las articulaciones tienen una posicion inicial de 0◦, y a
(a) (b)
Fig. 2. El miembro superior y el codo (a) Partes principales del miembrosuperior (b) Sistema Oseo que compone al codo.
traves de la cual es posible medir los rangos de movilidad encada articulacion como se muestra en la Fig. 3(a). Estos rangosde movilidad se dan sobre tres planos imaginarios principalesque dividen al cuerpo humano. Existen tres planos principales,sagital, frontal y transversal, los cuales se muestran en la Fig.3(b)[12].
(a) (b)
Fig. 3. Posicion de referencia del cuerpo y los planos que lo dividen. (a)Posicion de referencia cero. (b) Planos que dividen al cuerpo humano.
El hombro presenta 3 GdL sin considerar la movilidad de lacintura escapular, en este caso se considera solo 1 GdL con elmovimiento de flexion-extension como se puede observar enla Fig. 4
Fig. 4. Movimiento de flexion-extension de el hombro
XV COMROB 2013, FACULTAD DE ELECTROMECANICA, UNIVERSIDAD DE COLIMA, MANZANILLO, COLIMA, 1-4 OCTUBRE 2013 3
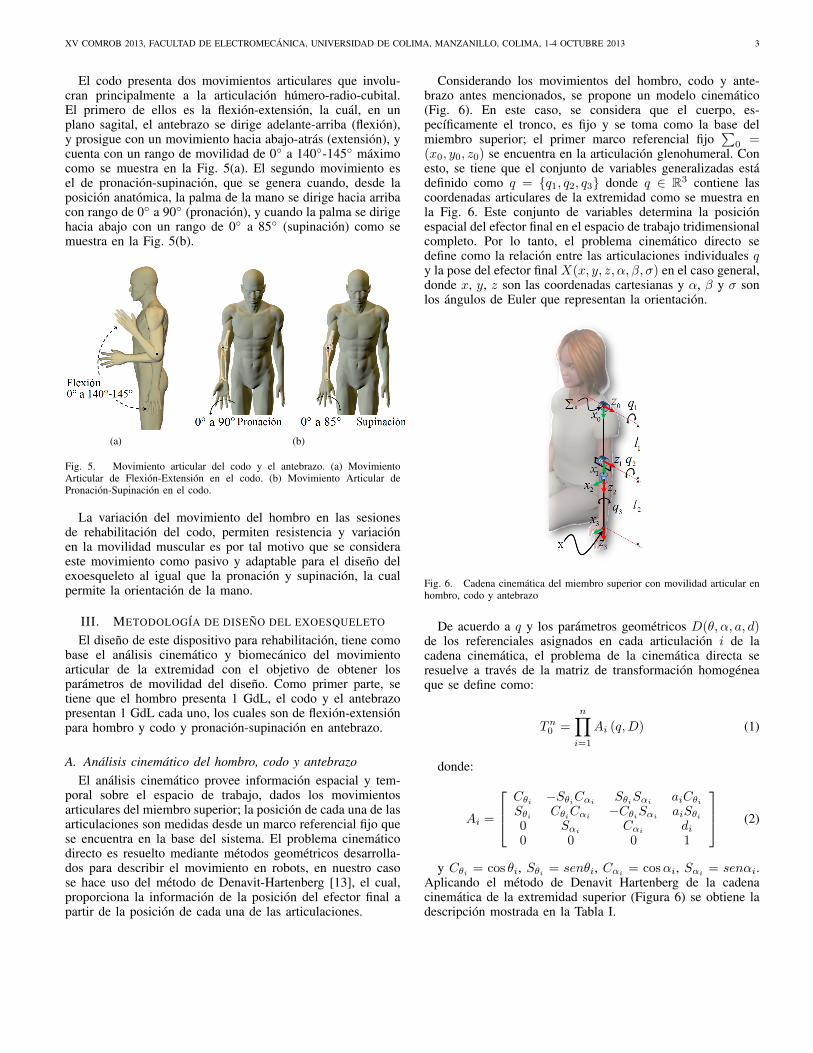
El codo presenta dos movimientos articulares que involu-cran principalmente a la articulacion humero-radio-cubital.El primero de ellos es la flexion-extension, la cual, en unplano sagital, el antebrazo se dirige adelante-arriba (flexion),y prosigue con un movimiento hacia abajo-atras (extension), ycuenta con un rango de movilidad de 0◦ a 140◦-145◦ maximocomo se muestra en la Fig. 5(a). El segundo movimiento esel de pronacion-supinacion, que se genera cuando, desde laposicion anatomica, la palma de la mano se dirige hacia arribacon rango de 0◦ a 90◦ (pronacion), y cuando la palma se dirigehacia abajo con un rango de 0◦ a 85◦ (supinacion) como semuestra en la Fig. 5(b).
(a) (b)
Fig. 5. Movimiento articular del codo y el antebrazo. (a) MovimientoArticular de Flexion-Extension en el codo. (b) Movimiento Articular dePronacion-Supinacion en el codo.
La variacion del movimiento del hombro en las sesionesde rehabilitacion del codo, permiten resistencia y variacionen la movilidad muscular es por tal motivo que se consideraeste movimiento como pasivo y adaptable para el diseno delexoesqueleto al igual que la pronacion y supinacion, la cualpermite la orientacion de la mano.
III. METODOLOGIA DE DISENO DEL EXOESQUELETO
El diseno de este dispositivo para rehabilitacion, tiene comobase el analisis cinematico y biomecanico del movimientoarticular de la extremidad con el objetivo de obtener losparametros de movilidad del diseno. Como primer parte, setiene que el hombro presenta 1 GdL, el codo y el antebrazopresentan 1 GdL cada uno, los cuales son de flexion-extensionpara hombro y codo y pronacion-supinacion en antebrazo.
A. Analisis cinematico del hombro, codo y antebrazoEl analisis cinematico provee informacion espacial y tem-
poral sobre el espacio de trabajo, dados los movimientosarticulares del miembro superior; la posicion de cada una de lasarticulaciones son medidas desde un marco referencial fijo quese encuentra en la base del sistema. El problema cinematicodirecto es resuelto mediante metodos geometricos desarrolla-dos para describir el movimiento en robots, en nuestro casose hace uso del metodo de Denavit-Hartenberg [13], el cual,proporciona la informacion de la posicion del efector final apartir de la posicion de cada una de las articulaciones.
Considerando los movimientos del hombro, codo y ante-brazo antes mencionados, se propone un modelo cinematico(Fig. 6). En este caso, se considera que el cuerpo, es-pecıficamente el tronco, es fijo y se toma como la base delmiembro superior; el primer marco referencial fijo
∑0 =
(x0, y0, z0) se encuentra en la articulacion glenohumeral. Conesto, se tiene que el conjunto de variables generalizadas estadefinido como q = {q1, q2, q3} donde q ∈ R3 contiene lascoordenadas articulares de la extremidad como se muestra enla Fig. 6. Este conjunto de variables determina la posicionespacial del efector final en el espacio de trabajo tridimensionalcompleto. Por lo tanto, el problema cinematico directo sedefine como la relacion entre las articulaciones individuales qy la pose del efector final X(x, y, z, α, β, σ) en el caso general,donde x, y, z son las coordenadas cartesianas y α, β y σ sonlos angulos de Euler que representan la orientacion.
Fig. 6. Cadena cinematica del miembro superior con movilidad articular enhombro, codo y antebrazo
De acuerdo a q y los parametros geometricos D(θ, α, a, d)de los referenciales asignados en cada articulacion i de lacadena cinematica, el problema de la cinematica directa seresuelve a traves de la matriz de transformacion homogeneaque se define como:
Tn0 =
n∏i=1
Ai (q,D) (1)
donde:
Ai =
Cθi −SθiCαi SθiSαi aiCθiSθi CθiCαi −CθiSαi aiSθi0 Sαi Cαi di0 0 0 1
(2)
y Cθi = cos θi, Sθi = senθi, Cαi = cosαi, Sαi = senαi.Aplicando el metodo de Denavit Hartenberg de la cadenacinematica de la extremidad superior (Figura 6) se obtiene ladescripcion mostrada en la Tabla I.

XV COMROB 2013, FACULTAD DE ELECTROMECANICA, UNIVERSIDAD DE COLIMA, MANZANILLO, COLIMA, 1-4 OCTUBRE 2013 4
TABLA I. PARAMETROS DENAVIT-HARTENBERG DE LA CADENACINEMATICA DE LA EXTREMIDAD SUPERIOR BRAZO-ANTEBRAZO-MANO.
Link i ai di αi θi1 l1 0 0 q12 0 0 −π
2 q2 − π2
3 0 l2 0 q3
La matriz de transformacion homogenea que representala cinematica directa del miembro superior a partir de losparametros D-H se define como
T 30 =
[R3
0 d30
0 1
]. (3)
En donde, el vector d30 define la posicion de la palma de
la mano respecto al primer marco referencial fijo∑
0, enlas coordenadas espaciales. Las coordenadas de la palma dela mano d3
0 = (x30, y30 , z
30)T se obtienen por medio de las
siguientes ecuaciones:
x30 = l2 cos (q1 + q2) + l1 cos (q1)y30 = l2sen (q1 + q2) + l1sen (q1)z30 = 0
(4)
A traves del calculo numerico de la cinematica directa sepuede obtener el espacio de trabajo de la extremidad, esto es,a partir de una descomposicion de la matriz de transformacionhomogenea como se muestra en la ecuacion 5 de la que seextrae el vector de posicion dni−1 = (xni−1, y
ni−1, z
ni−1)
T paracada complejo articular
T 30 = A1
0︸︷︷︸Hombro
A21︸︷︷︸
Codo
A32︸︷︷︸
Antebrazo
=
[Rni−1 dni−10 1
]. (5)
En donde i es la articulacion y n es el numero de gradosde libertad totales. Ahora bien, cada uno de los grados delibertad tiene un rango de accion limitado debido a que losmovimientos de la extremidad estan restringidos fısicamentepor la articulacion, los musculos y tendones, y la configuraciondel cuerpo. La Academia Americana de Cirujanos Ortopedicos(AAOS) y la Asociacion para el Estudio de Osteosıntesis(AO) proponen los rangos de movilidad para cada articulacion,presentados en la Tabla II, basados en sus movimientos basicos[12].
TABLA II. RANGOS DE MOVILIDAD MAXIMOS DE LASARTICULACIONES DEL MIEMBRO SUPERIOR.
Movimiento AO AAOSFlexion (Hombro) 0 a 150◦/170◦ 0 a 180◦
Extension (Hombro) 0 a 40◦ 0 a 60◦
Flexion (Codo) 0 a 150◦ 0 a 150◦
Extension (Codo) 0 a 10◦ 0◦ a 10Pronacion (Codo) 0 a 90◦ 0 a 80◦
Supinacion (Codo) 0 a 90◦ 0 a 80◦
Para efectos de simulacion, se propuso usar los valoresmaximos permitidos en cada articulacion incluidos en la TablaII; para las longitudes entre articulaciones, se utilizaron datos
antropometricos que se obtuvieron experimentalmente de unamuestra de la poblacion como parte de este trabajo.
El analisis de simulacion se realizo al modelo de extremidadsuperior con base fija para determinar sus movimientos encondiciones normales. El analisis se hizo de manera individualconsiderando cada una de las articulaciones principales, artic-ulacion del hombro, del codo y el antebrazo. Para el modelocinematico del exoesqueleto, el analisis se realiza de la mismaforma que el modelo presentado en esta seccion, medianteDenavit Hartenberg, por lo que solo se utilizan las ecuacionesque representan el movimiento.
El analisis anatomico del miembro superior inicia en elhombro, de el cual solo se ha tomado en cuenta la flexion yla extension. Este movimiento se puede visualizar en la Fig.7
−0.2 −0.1 0 0.1 0.2 0.3
−0.5−0.3
−0.10.1
0.30.50.5
−0.5
−0.3
−0.1
0.1
0.3
0.50.5
Z
Flexión−extensión del hombro
Y
X
Flexión−extensión
Fig. 7. Simulacion del espacio de trabajo del hombro
Ahora bien, el codo presenta el movimiento de flexion-extension y utilizando la Tabla II de los rangos maximos demovilidad articular se obtiene la simulacion de movimiento delcodo, cabe mencionar que no se considera la hiperextensiondel codo.
−0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5
−0.4−0.2
00.2
−0.5
0
0.5
Z
Movimiento de flexión y extensión en la articulación del codo
Y
X
Flexión−extensión del antebrazo
Fig. 8. Simulacion del espacio de trabajo del codo
El movimiento de pronacion-supinacion no es posible visu-alizarlo ya que el giro se encuentra sobre el eje del antebrazo,este solo permite la variacion de la orientacion del efector final.Finalmente, a partir de los movimientos del hombro, codo yantebrazo y sus restricciones de movimiento angular se obtuvoel espacio de trabajo que el exoesqueleto debe cubrir (ver Fig.9).
B. Analisis cinematico del exoesqueletoA partir de la movilidad de cada una de las articulaciones
contempladas (hombro, codo y antebrazo), se propone el

XV COMROB 2013, FACULTAD DE ELECTROMECANICA, UNIVERSIDAD DE COLIMA, MANZANILLO, COLIMA, 1-4 OCTUBRE 2013 5
−0.5−0.4−0.3−0.2−0.100.10.20.30.40.5−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
Y
Espacio de trabajo de la extremidad con movimientos de hombro y codo bajo parámetros de restricción
X
Articulación del hombro (q1)
Antebrazo (q3)
Articulación del codo (q2)
Fig. 9. Simulacion del espacio de trabajo del miembro superior
modelo cinematico del exoesqueleto, el conjunto de variablesgeneralizadas esta definido como θ = {θ1, θ2, θ3} en dondeθ ∈ R3 y contiene las coordenadas articulares del exoesqueletocomo se muestra en la Fig. 10. A traves del metodo deDenavit-Hartemberg, la cadena cinematica propuesta se puedevisualizar en la Fig. 10.
Fig. 10. Modelo cinematico de 3 GDL propuesto para el exoesqueleto
Con los marcos referenciales establecidos se determinanlos parametros D(a,d,α,θ) para cada una de las articulaciones.
TABLA III. TABLA DENAVIT-HARTENBERG DEL MODELOCINEMATICO PROPUESTO DEL EXOESQUELETO
Link i ai di αi θi
1 l1 0 0 θ1
2 0 l2π2 θ2 − π
2
3 0 l3 0 θ3
Ya obtenidos los parametros Denavit-Hartenberg, se ob-tienen los tres primeros elementos de la ultima columna de lamatriz T3
0, estos son el vector de posicion d30 del exoesqueletoy determina la posicion del efector final en funcion de los
angulos de rotacion del dispositivo en los tres ejes de referenciadel marco inicial(x0, y0, z0) . De esta manera la posicion delefector final del dispositivo esta determinada por las siguientesecuaciones:
x30 = l3 cos (θ1 + θ2) + l1 cos (θ1)y30 = l3sen (θ1 + θ2) + l1sen (θ1)z30 = l2
(6)
Con los parametros anteriores se tiene resuelta la cinematicadirecta del prototipo, con la cual se puede obtener la posiciondel efector final conforme se varıan los angulos de cadaarticulacion, a partir de los cuales es posible encontrar elespacio de trabajo total del exoesqueleto (ver Fig. 11).
−0.3−0.2−0.100.10.20.30.4−0.5
−0.35
−0.2
−0.05
0.1
0.25
0.4
0.5
Y
Modelo cinemático del exoesqueleto y su espacio de trabajo.
X
Espacio de trabajo del exoesqueleto
Eslabon del exoesqueleto para el brazo (azul)
Articulación del hombro
Articulación del codo (verde)
Antebrazo(rojo)
Eslabón del exoesqueletopara el antebrazo (azul)
Fig. 11. Simulacion del espacio de trabajo del exoesqueleto
Finalmente se realizo un modelo comparativo del espaciode trabajo del miembro superior con el espacio de trabajodel exoesqueleto con la finalidad de validar la propuesta demovimientos del exoesqueleto. En la Fig. 12 se puede observarque la articulacion θ1 representa la articulacion del hombro yque ademas es el punto de la base fija del exoesqueleto. Eleslabon del antebrazo se encuentra en la misma posicion quedel antebrazo, ya que el giro de la articulacion del antebrazo(pronacion-supinacion) esta sobre su eje.
−0.2−0.100.10.20.3−0.2
−0.10
0.10.2
−0.2
−0.05
0.1
0.25
Y
Espacio de trabajo del exoesqueletoy del miembro superior con restricciones de movilidad
en hombro (flexión−extensión) y en codo (flexión−extensión)
Z
X
Articulación θ1 y base fija
del exoesqueleto
Fig. 12. Simulacion del espacio de trabajo del exoesqueleto y el miembrosuperior
C. Antropometrıa del miembro superiorLa antropometrıa es un area encargada de las mediciones
corporales humanas. Su objetivo es aplicar diversas tecnicas demedicion para la obtencion de datos para el diseno de sistemasergonomicos y adaptables, en nuestro caso, del exoesqueleto
XV COMROB 2013, FACULTAD DE ELECTROMECANICA, UNIVERSIDAD DE COLIMA, MANZANILLO, COLIMA, 1-4 OCTUBRE 2013 6
que se encuentren en contacto directo con el paciente [14]. Eldiseno adaptable del exoesqueleto, esta basado principalmenteen las mediciones longitudinales y diametrales. Para esto,se tomaron muestras de 30 personas adultas cuyo rango deedad comprende de los 15 a los 35 anos y se determinaronlas holguras y ajustes que el dispositivo toma en cuenta almomento de su diseno, con la finalidad de que sea ergonomicoadaptandose a las caracterısticas del paciente. Se tomaronmedidas de longitud del brazo y del antebrazo como se puedeobservar en las Fig. 13(a) y 13(b), ası como medidas dediametros en las partes del hombro(1), brazo(2), antebrazo(3)y muneca(4) como se muestra en la Fig. 13(c).
(a) (b) (c)
Fig. 13. Antropometrıa del miembro superior. (a) Acromial-Radial. (b)Radial-Estiloidea. (c) Mediciones diametrales
IV. MODELO MECANICO DEL EXOESQUELETO
El modelo del exoesqueleto debe de reproducir la movilidaddel hombro, codo y antebrazo, abarcando el espacio de trabajotal y como se evaluo en el modelo cinematico del dispositivo,considerando las limitaciones articulares. En base a lo anterior,el diseno mecanico esta basado en los parametros obtenidosde las medidas antropometricas para la construccion de loseslabones y mecanismos. El dispositivo contiene adaptadoresantropometricos para las longitudes del brazo,antebrazo ymuneca en relacion al rango de medidas obtenidas.
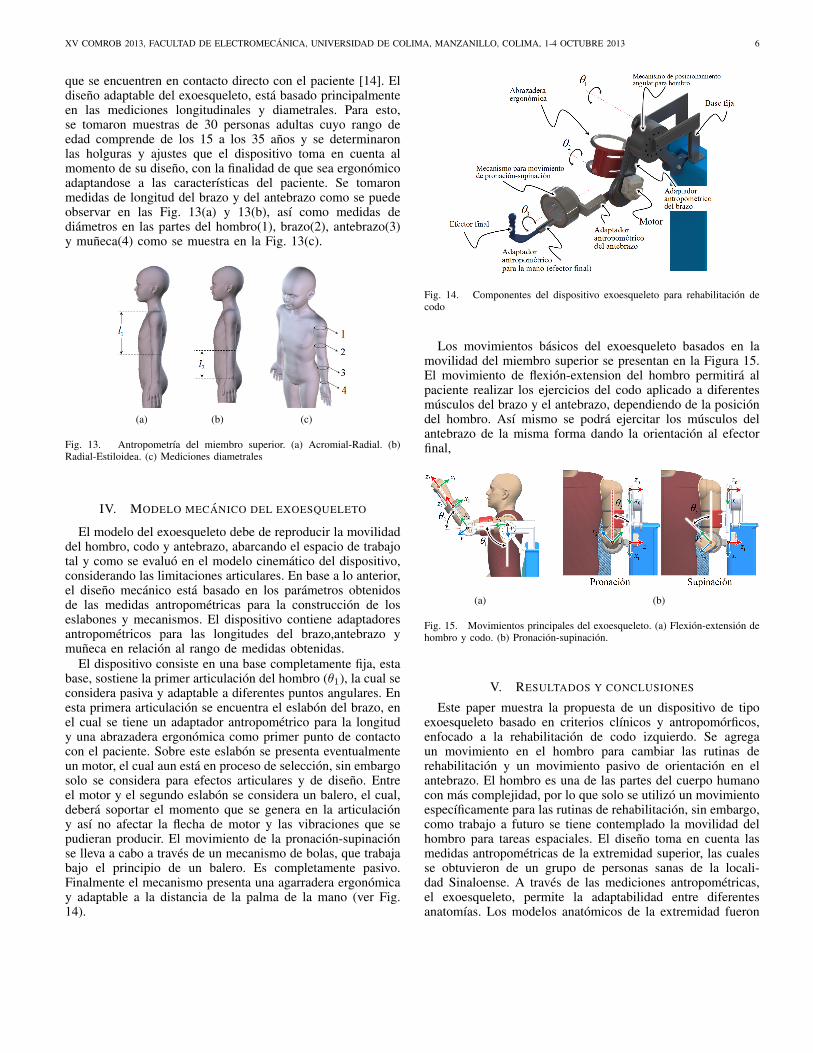
El dispositivo consiste en una base completamente fija, estabase, sostiene la primer articulacion del hombro (θ1), la cual seconsidera pasiva y adaptable a diferentes puntos angulares. Enesta primera articulacion se encuentra el eslabon del brazo, enel cual se tiene un adaptador antropometrico para la longitudy una abrazadera ergonomica como primer punto de contactocon el paciente. Sobre este eslabon se presenta eventualmenteun motor, el cual aun esta en proceso de seleccion, sin embargosolo se considera para efectos articulares y de diseno. Entreel motor y el segundo eslabon se considera un balero, el cual,debera soportar el momento que se genera en la articulaciony ası no afectar la flecha de motor y las vibraciones que sepudieran producir. El movimiento de la pronacion-supinacionse lleva a cabo a traves de un mecanismo de bolas, que trabajabajo el principio de un balero. Es completamente pasivo.Finalmente el mecanismo presenta una agarradera ergonomicay adaptable a la distancia de la palma de la mano (ver Fig.14).
Fig. 14. Componentes del dispositivo exoesqueleto para rehabilitacion decodo
Los movimientos basicos del exoesqueleto basados en lamovilidad del miembro superior se presentan en la Figura 15.El movimiento de flexion-extension del hombro permitira alpaciente realizar los ejercicios del codo aplicado a diferentesmusculos del brazo y el antebrazo, dependiendo de la posiciondel hombro. Ası mismo se podra ejercitar los musculos delantebrazo de la misma forma dando la orientacion al efectorfinal,
(a) (b)
Fig. 15. Movimientos principales del exoesqueleto. (a) Flexion-extension dehombro y codo. (b) Pronacion-supinacion.
V. RESULTADOS Y CONCLUSIONES
Este paper muestra la propuesta de un dispositivo de tipoexoesqueleto basado en criterios clınicos y antropomorficos,enfocado a la rehabilitacion de codo izquierdo. Se agregaun movimiento en el hombro para cambiar las rutinas derehabilitacion y un movimiento pasivo de orientacion en elantebrazo. El hombro es una de las partes del cuerpo humanocon mas complejidad, por lo que solo se utilizo un movimientoespecıficamente para las rutinas de rehabilitacion, sin embargo,como trabajo a futuro se tiene contemplado la movilidad delhombro para tareas espaciales. El diseno toma en cuenta lasmedidas antropometricas de la extremidad superior, las cualesse obtuvieron de un grupo de personas sanas de la locali-dad Sinaloense. A traves de las mediciones antropometricas,el exoesqueleto, permite la adaptabilidad entre diferentesanatomıas. Los modelos anatomicos de la extremidad fueron
XV COMROB 2013, FACULTAD DE ELECTROMECANICA, UNIVERSIDAD DE COLIMA, MANZANILLO, COLIMA, 1-4 OCTUBRE 2013 7
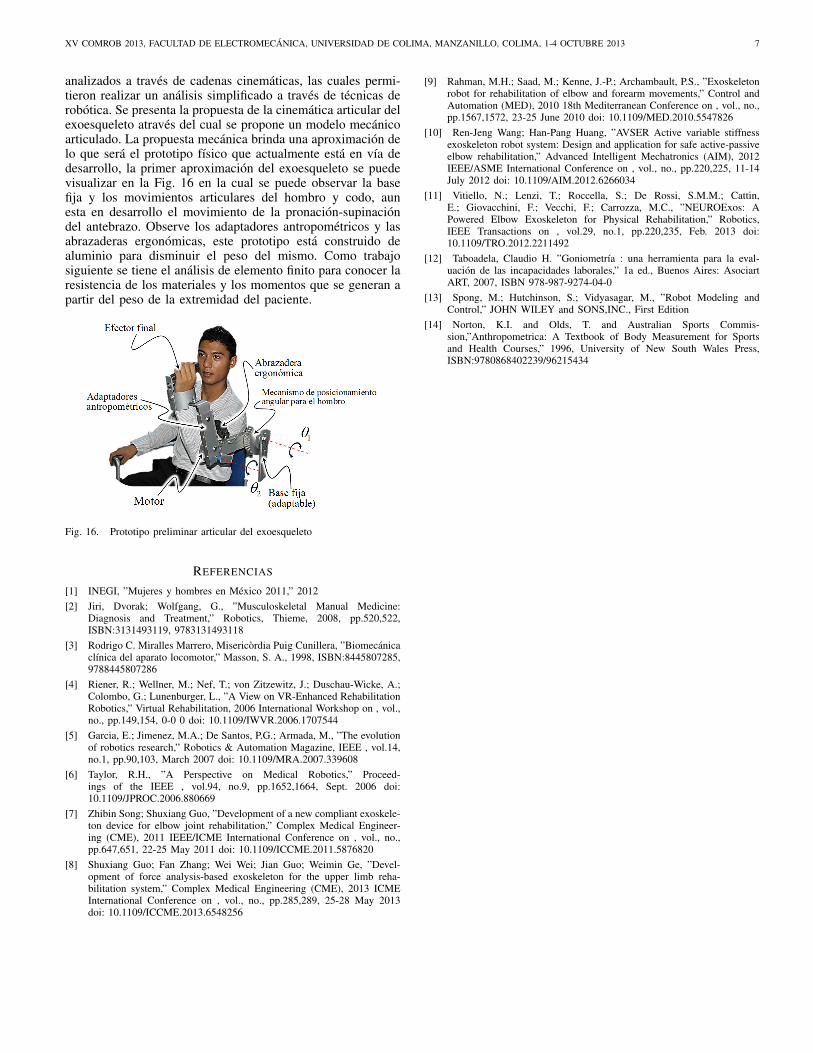
analizados a traves de cadenas cinematicas, las cuales permi-tieron realizar un analisis simplificado a traves de tecnicas derobotica. Se presenta la propuesta de la cinematica articular delexoesqueleto atraves del cual se propone un modelo mecanicoarticulado. La propuesta mecanica brinda una aproximacion delo que sera el prototipo fısico que actualmente esta en vıa dedesarrollo, la primer aproximacion del exoesqueleto se puedevisualizar en la Fig. 16 en la cual se puede observar la basefija y los movimientos articulares del hombro y codo, aunesta en desarrollo el movimiento de la pronacion-supinaciondel antebrazo. Observe los adaptadores antropometricos y lasabrazaderas ergonomicas, este prototipo esta construido dealuminio para disminuir el peso del mismo. Como trabajosiguiente se tiene el analisis de elemento finito para conocer laresistencia de los materiales y los momentos que se generan apartir del peso de la extremidad del paciente.
Fig. 16. Prototipo preliminar articular del exoesqueleto
REFERENCIAS
[1] INEGI, ”Mujeres y hombres en Mexico 2011,” 2012[2] Jiri, Dvorak; Wolfgang, G., ”Musculoskeletal Manual Medicine:
Diagnosis and Treatment,” Robotics, Thieme, 2008, pp.520,522,ISBN:3131493119, 9783131493118
[3] Rodrigo C. Miralles Marrero, Misericordia Puig Cunillera, ”Biomecanicaclınica del aparato locomotor,” Masson, S. A., 1998, ISBN:8445807285,9788445807286
[4] Riener, R.; Wellner, M.; Nef, T.; von Zitzewitz, J.; Duschau-Wicke, A.;Colombo, G.; Lunenburger, L., ”A View on VR-Enhanced RehabilitationRobotics,” Virtual Rehabilitation, 2006 International Workshop on , vol.,no., pp.149,154, 0-0 0 doi: 10.1109/IWVR.2006.1707544
[5] Garcia, E.; Jimenez, M.A.; De Santos, P.G.; Armada, M., ”The evolutionof robotics research,” Robotics & Automation Magazine, IEEE , vol.14,no.1, pp.90,103, March 2007 doi: 10.1109/MRA.2007.339608
[6] Taylor, R.H., ”A Perspective on Medical Robotics,” Proceed-ings of the IEEE , vol.94, no.9, pp.1652,1664, Sept. 2006 doi:10.1109/JPROC.2006.880669
[7] Zhibin Song; Shuxiang Guo, ”Development of a new compliant exoskele-ton device for elbow joint rehabilitation,” Complex Medical Engineer-ing (CME), 2011 IEEE/ICME International Conference on , vol., no.,pp.647,651, 22-25 May 2011 doi: 10.1109/ICCME.2011.5876820
[8] Shuxiang Guo; Fan Zhang; Wei Wei; Jian Guo; Weimin Ge, ”Devel-opment of force analysis-based exoskeleton for the upper limb reha-bilitation system,” Complex Medical Engineering (CME), 2013 ICMEInternational Conference on , vol., no., pp.285,289, 25-28 May 2013doi: 10.1109/ICCME.2013.6548256
[9] Rahman, M.H.; Saad, M.; Kenne, J.-P.; Archambault, P.S., ”Exoskeletonrobot for rehabilitation of elbow and forearm movements,” Control andAutomation (MED), 2010 18th Mediterranean Conference on , vol., no.,pp.1567,1572, 23-25 June 2010 doi: 10.1109/MED.2010.5547826
[10] Ren-Jeng Wang; Han-Pang Huang, ”AVSER Active variable stiffnessexoskeleton robot system: Design and application for safe active-passiveelbow rehabilitation,” Advanced Intelligent Mechatronics (AIM), 2012IEEE/ASME International Conference on , vol., no., pp.220,225, 11-14July 2012 doi: 10.1109/AIM.2012.6266034
[11] Vitiello, N.; Lenzi, T.; Roccella, S.; De Rossi, S.M.M.; Cattin,E.; Giovacchini, F.; Vecchi, F.; Carrozza, M.C., ”NEUROExos: APowered Elbow Exoskeleton for Physical Rehabilitation,” Robotics,IEEE Transactions on , vol.29, no.1, pp.220,235, Feb. 2013 doi:10.1109/TRO.2012.2211492
[12] Taboadela, Claudio H. ”Goniometrıa : una herramienta para la eval-uacion de las incapacidades laborales,” 1a ed., Buenos Aires: AsociartART, 2007, ISBN 978-987-9274-04-0
[13] Spong, M.; Hutchinson, S.; Vidyasagar, M., ”Robot Modeling andControl,” JOHN WILEY and SONS,INC., First Edition
[14] Norton, K.I. and Olds, T. and Australian Sports Commis-sion,”Anthropometrica: A Textbook of Body Measurement for Sportsand Health Courses,” 1996, University of New South Wales Press,ISBN:9780868402239/96215434