Популярная робототехника и 3д-печать
TRANSCRIPT

Последние два-три года можно охарактеризовать повышенным интересом к роботам. Точнее, мечты об умных механизмах влекли людей многие столетия (здесь принято вспоминать бронзового великана Талоса из мифов Древней Греции). Но сейчас ажиотаж вызван не новой волной мимолетной моды на очередной фильм или литературное произведение, процессы гораздо более глубокие. Всё больше команд начинает новые проекты в области робототехники, многие уже достигли впечатляющих результатов, роботы появляются на ставших регулярными робототехнических выставках, всё чаще появляются анонсы новых умных коммерческих устройств, которые имеют все шансы войти в нашу повседневную жизнь.
Для бурного роста коммерческой робототехники есть все предпосылки, современные технологии уже создали для этого необходимую почву: на рынке представлены высокопроизводительные мобильные процессоры, дешевые электронные компоненты и, самое интересное, технологии 3Д-печати стали доступны массовым потребителям. Участникам новой высокотехнологичной гонки остаётся только собрать вместе нужные компоненты и сделать очередное полезное (или бесполезное) устройство.
Стоит отдельно сказать про 3Д-печать, вокруг которой наблюдается не меньший ажиотаж, а 3Д-принтеры следуют рука об руку с роботами по всем выставкам. Отметим, что технологии 3Д-печати были изобретены еще в 80 годы XX века в США [1], однако до недавнего времени они были реализованы лишь в дорогостоящем промышленном оборудовании. Отсчет новой эры массовой 3Д-печати ведут с 2009 года, когда истекли первые патенты на технологию послойного наплавления пластика [2], что почти сразу привело к появлению огромного количества новых игроков, предлагающих разнообразные настольные 3Д-принтеры лёгкие в освоении по доступной для среднего потребителя цене. При появлении более совершенных 3Д-принтеров роль 3Д-печати в повседневной жизни будет увеличиваться, её влияние — расти.
Авторитетные исследователи считают, что мир ощутит серьезные изменения от распространения технологий цифрового производства и робототехники уже в ближайшие годы. По прогнозам компании IBM, через 10 лет значительная часть деталей для электронных приборов будет печататься на 3Д-принтерах (слуховой аппарат можно будет напечатать целиком), а компактные центры производства будут равномерно распределены по территориям стран [3], у которых хватит мудрости и сил реализовать у себя очередной виток новой индустриализации. Эксперты компании Gartner предсказывают, что к 2020 году машины будут вытеснять людей с узкоспециализированных низкоквалифицированных рабочих мест [4]. А исследование Международной ассоциации робототехники (IFR) показало, что каждое внедрение промышленного робота в среднем создаёт 3 новых высококвалифицированных рабочих места [5].
Логистические цепочки и центры производства в США сейчас, через 5 и через 10 лет попрогнозам IBM. Изображение с сайта scdigest.com
Распространение большого количества небольших автоматизированных центров
мелкосерийного производства приведёт к появлению спроса на людей, которые смогут создавать и дорабатывать модели вещей и сразу готовить их для производства, дополнительному спросу на программистов и наладчиков нового производственного оборудования, ну и конечно на людей, которые смогут новые станки проектировать и создавать.
В США правительство верит, что 3Д-печать вернёт в Америку высокотехнологичные рабочиеместа [6], в 2013 году там была запущена программа «3Д-принтер в каждую школу США» [7]. Япония, Англия, Австралия тоже не отстают и реализуют собственные программы по внедрению 3Д-печати в школах и университетах.
Россия в этом направлении хотя и не задаёт моду, но уверенно держится в тренде. Министерство экономического развития при участии Фонда содействия развитию малых форм инновационного предпринимательства (в народе «Фонд Бортника») и РВК (Российская венчурная компания) запустило программу по созданию сети региональных Центров молодежного инновационного творчества (ЦМИТ) и лабораторий в формате Фаблаб (ЦМИТы ориентированы на школьников, а Фаблабы — на университеты) [8]. Типовая лаборатория Фаблаб (или ЦМИТ) включает набор современного оборудования для цифрового производства и предполагает свободный доступ для учителей, преподавателей, школьников и студентов. Оборудование включает 3Д-принтеры, станки для фрезерования и лазерной резки дерева и пластика, а также инструменты для проектирования, производства и программирования электронных устройств такие, как наборы микроконтроллерных плат семейства Arduino.
По программе Минэкономразвития, регион, принявший решение создать у себя лабораторию ЦМИТ, должен выделить в среднем 20% её стоимости из собственных средств, в этом случае федеральный бюджет добавит к ним остальные 80%. Стоимость лаборатории составляет 10 миллионов рублей, большая часть этих денег тратится на оборудование.
Подобные центры уже созданы в ряде регионов России: в Москве, Санкт-Петербурге, Астрахани, Пензе, Екатеринбурге, Томске, Красноярске, Уфе, Казани, Иркутске, Дрожжаном, Краснодаре [9], подключаются новые города.

Фаблаб Политех в Санкт-Петербурге. Фото с сайта fablab.spbstu.ru
На конференции «Дни робототехники в городе Сочи», прошедшей в ноябре 2014, министр образования России Дмитрий Ливанов сообщил, что курс робототехники может войти в школьную программу предмета «технология» в российских школах уже с сентября учебного года 2015 [10]. По его словам, в министерстве образования считают образовательную робототехнику важным направлением работы, которое позволяет развивать межпредметные учебные результаты у школьников.
Действительно, для того, чтобы создавать мехатронные устройства, необходимо обладать знаниями и умениями пожалуй, во всех науках: математика, информатика, физика, электроника, механика, геометрия, черчение, список можно продолжать. Даже русский язык и литература обязательно понадобятся там, где необходимо организовать естественное общение между человеком и машиной.
Самый простой способ войти в мир робототехники — это работа с робототехническим конструктором. В российских кружках и школах довольно популярны робототехнические наборы под маркой Лего. Существуют очень хорошие отечественные разработки — конструкторы ТРИК и СкретчДуино (оба родом из Санкт-Петербурга). Конструкторы позволяют легко собрать модель из готовых деталей и запрограммировать её для решения заданий, например, для соревнования роботов.

Модель робота из конструктора ТРИК. Фото с сайта trikset.com
Следующий этап — это научиться проектировать и создавать детали для роботов самостоятельно. Такой подход может показаться немного сложнее, чем работа с конструктором, но в конечном итоге он предоставит гораздо больше свободы и направлений для творчества.
Попробуем сделать первые шаги в этом направлении и рассмотрим процесс создания простого мехатронного устройства — небольшого робота на колесах. Пройдем путь от компьютерного моделирования деталей до сборки и программирования нашего робота, научимся работать с 3Д-принтером и программировать взрослые микроконтроллеры, управлять моторчиками и датчиками, то есть получим в руки все необходимые инструменты для того, чтобы создавать собственные устройства. Серия уроков включает знакомство с трёхмерным моделированием и 3Д-печатью, знакомство с двумерным моделированием и цифровым производством плоских деталей, знакомство с программированием микроконтроллеров семейства Arduino; далее — проектирование деталей для робота-машинки, производство деталей на оборудовании Фаблаба, сборка робота, подключение электроники — микроконтроллера, моторчиков и датчиков, и, наконец, программирование робота для выполнения заданий.
Результатом финального занятия серии будет вот такой робот-машинка, спроектированный и собранный полностью по нашим чертежам:

Колёса машинки смоделированы на компьютере в специальной программе для создания трёхмерных моделей и «распечатаны» на обычном 3Д-принтере, плоские детали корпуса смоделированы в программе для создания двумерных электронных чертежей и вырезаны лазером из пластика (это также может быть дерево или металл). Управляет роботом микроконтроллер на плате семейства Arduino, его легко программировать с любого компьютера через обычный шнур USB; моторчики, датчики и прочие электронные компоненты придётся купить отдельно.
Урок 1: трёхмерное моделирование и трёхмерная печать
Выделяют четыре основные технологии трёхмерной печати: стереолитография (жидкий полимер затвердевает под действием лазерного луча), лазерное спекание порошка из металлаили пластика, послойное наплавление пластика и послойное склеивание порошка. Устройство, создающее физические детали из компьютерной модели по технологии трёхмерной печати, называют 3Д-принтером. В каждом случае модель создаётся слой за слоем при помощи постепенного добавления материала к уже воспроизведенной части, поэтому такие технологии производства также называют аддитивными (англ. add – добавлять). Так как для «печати» (специалисты предпочитают термин выращивание) изделия 3Д-принтер использует трёхмерную компьютерную (то есть цифровую) модель, трёхмерную печать также относят к технологиям цифрового производства.

Модель турбины, изготовленная по технологии промышленной трёхмерной печати. Фото ссайта eos.info
Как было отмечено ранее, технологии трёхмерной печати появились еще в начале 80 годов XX века в США [1]. Однако до недавнего времени они были доступны лишь для владельцев дорогостоящего промышленного оборудования и не были известны широкой аудитории. Всё изменилось в 2009 году, когда истекли первые патенты на технологию послойного наплавления (англ.: fused deposition modeling, FDM) [2]. Это привело к появлению большого количества новых и, главное, доступных по цене 3Д-принтеров, работающих по технологии послойного наплавления пластика, от разных производителей по всему миру. Таким образом, 3Д-печать из технологии дорогостоящего специализированного производства превратилась в технологичное развлечение, доступное широкому кругу увлечённых людей.
Один из самых известных производителей недорогих настольных 3Д-принтеров «новой волны» – американская компания MakerBot с линейкой устройств «MakerBot Replicator», была основана как раз в 2009 году. На сайте международного сообщества RepRap reprap.org воткрытый доступ выложены чертежи и инструкции для самостоятельного создания персональных 3Д-принтеров в домашних условиях. Из российских команд стоит отметить компании PICASO 3D из Зеленограда и RUBOT из Санкт-Петербурга, которые производят и продают оригинальные модели 3Д-принтеров собственной разработки.

Настольный 3Д-принтер Mendel с открытым исходным кодом и чертежами,опубликованными на сайте RepRap.org. Фото с сайта reprap.org
Однако технология послойного наплавления пластика обладает рядом серьёзных недостатков— в первую очередь это относительно низкое качество производимых изделий, от которого страдают как дешевые настольные, так и дорогие промышленные 3Д-принтеры. Детали, созданные на таких 3Д-принтерах, вполне годятся для демонстрационных и экспериментальных моделей, но уже не подходят для использования в финальных коммерческих изделиях, так как сильно уступают традиционным технологиям серийного производства. Стереолитография и лазерное спекание металлического или пластикового порошка дают гораздо лучший результат, но они пока еще не получили широкого распространения среди массовых потребителей.
В 2012 году компания Formlabs объявила о создании первого настольного 3Д-принтера, работающего по технологии стереолитографии (англ.: stereolithography, SLA), — Form1, первые устройства поступили в продажу в 2013 году. Принтер получил хорошие отзывы, качество и точность изготавливаемых на нем изделий на порядок превосходят результаты, получаемые при послойном наплавлении. Однако стереолитография также имеет серьезное ограничение — набор материалов, которые подходят для использования с этой технологией, сильно ограничен.
Специалисты прогнозировали истечение ключевых патентов на технологии выборочного лазерного спекания (англ.: selective laser sintering, SLS) уже в 2014 году [2]. Многие связывают с этим надежды на появление в обозримом будущем новых недорогих 3Д-принтеров, которые смогут создавать качественные изделия из пластика или металла, предназначенные для повседневного использования [11]. В том случае, если эти надежды оправдаются, можно ожидать новой волны распространения технологий трёхмерной печати иих глубокого проникновения в повседневную жизнь людей, даже далёких от высоких

технологий.
Первый настольный 3Д-принтер, работающий по технологии стереолитографии, FormlabsForm1. Фото с сайта formlabs.com
Так или иначе, для того, чтобы инженер или художник мог использовать 3Д-принтер по назначению, он должен уметь создавать виртуальные трёхмерные модели, которые принтер будет превращать в реальные физические изделия. Для создания и редактирования цифровыхтрёхмерных моделей на компьютере существуют специальные программы, которые можно условно разделить на два больших класса: редакторы трёхмерной графики для художников и системы автоматического проектирования трёхмерных моделей для инженеров.
3Д редакторы «для художников» обычно используют при создании компьютерных моделей для фильмов, мультфильмов, компьютерных игр, дизайна интерьеров, красивых картинок. Они содержат базовые инструменты, позволяющие облегчить создание сложных объемных моделей произвольной формы. В число расширенных возможностей редактора могут входитьинструменты для наложения текстур, анимации, отрисовки сцены в фотореалистичное изображение. Можно сказать, что в таких редакторах во главу угла ставится внешний вид модели, а не её функциональные свойства. Среди популярных программ для редактирования трёхмерной графики можно перечислить Blender, Autodesk 3ds Max, Autodesk Maya, Google SketchUp.
Системы автоматического проектирования (САПР; англ.: computer-aided design, CAD) «для инженеров» используют для создания электронных моделей деталей и устройств, которые планируется отправить в производство. Поэтому такой редактор позволит задать точные размеры, положение и форму для каждого элемента модели. Продвинутые системы могут даже разрешить указать материал, из которого планируется сделать детали, собрать из них виртуальную конструкцию и провести испытания на прочность (конечно, в виде симуляции)

прямо на компьютере. Программ семейства 3Д-САПР выпущено довольно много, можно перечислить некоторые: коммерческие тяжеловесы КОМПАС-3D, Autodesk Inventor, SolidWorks, BricsCAD; с открытым исходным кодом FreeCAD, BRL-CAD, OpenSCAD.
Решение, какую именно программу для моделирования использовать, следует принимать исходя из особенностей поставленной задачи и ваших умений в моделировании. Но какую бысистему вы ни выбрали, она скорее всего позволит экспортировать созданную трёхмерную модель в универсальный формат для производства на 3Д-принтере.
Итак, наконец приступим к моделированию. Так как мы делаем детали для робота, а конструкция робота требует точных размеров, будем работать в программе класса 3Д-САПР. Опытные инженеры годами изучают возможности, предоставляемые профессиональными дорогостоящими 3Д-САПРами, но далеко не каждому из них суждено достигнуть вершин мастерства. Однако мы для себя (конечно, только на первых порах) ставим задачи поскромнее, поэтому начнем знакомство с системами автоматического проектирования пожалуй с самой простой (но в умелых руках довольно могущественной) программы в этой области, которая называется OpenSCAD.
Установочный файл OpenSCAD для операционной системы Windows занимает всего 8 мегабайт, его можно бесплатно скачать с официального сайта проекта openscad.org; программа также работает в операционных системах семейства Linux и Mac OS X. OpenSCAD является свободным программным обеспечением с открытым исходным кодом; это значит, что его можно скачивать, распространять и абсолютно легально устанавливать на любое количество компьютеров, а при желании и должном умении можно принять участие в развитии проекта, внося улучшения и исправления прямо в исходный код.
Любая модель в OpenSCAD состоит из набора простых геометрических тел: прямоугольный параллелепипед, шар, цилиндр, призма. Объекты можно произвольно перемещать на трёхмерной рабочей сцене, поворачивать, масштабировать, объединять друг с другом, вычитать друг из друга. Это не все возможности OpenSCAD, но их вполне хватит, чтобы проектировать сложные функциональные детали. Перед началом моделирования всегда стоитмысленно представить деталь в виде комбинации шаров, кубов и цилиндров, расположенныхв трёхмерном пространстве, после этого процесс создания модели становится делом терпения и техники.
Технически процесс моделирования в OpenSCAD отличается от процесса моделирования во многих других редакторах, в нём модель создаётся при помощи последовательности специальных команд, которые пользователь вводит как обычный текст прямо с клавиатуры; трёхмерная модель рядом с редактором текста только показывает результат. Такой процесс моделирования очень похож на процесс программирования, чем он по сути и является.
Рассмотрим всю процедуру — создадим трёхмерную модель робота с планеты Шелезяка, который спас птицу говоруна от космических пиратов в мультфильме «Тайна третьей планеты».

Мы видим, что редактор состоит из двух главных областей: слева редактор кода для создания модели, справа — вид трёхмерной модели. Для того, чтобы построить и отобразить модель по введённому коду, нужно выполнить команду меню «Design / Compile» (горячая клавиша F5) или «Design / Compile and Render» (горячая клавиша F6).
Создадим сферу — введём в редактор команду sphere, внутри круглых скобок указываем параметр — радиус 25 миллиметров. Каждая команда должна обязательно завершаться точкой с запятой. Двойная наклонная черта начинает комментарий, после неё можно писать любой текст до завершения строки. Нажимаем F5 и справа наблюдаем результат.
Трёхмерную модель в области справа можно приближать и отдалять прокруткой колеса мыши, вращать мышью с зажатой левой кнопкой, перемещать точку обзора мышью с зажатойправой кнопкой.
Добавим на сцену куб (команда cube) и переместим его вниз при помощи команды translate

так, чтобы он закрыл сферу наполовину (команда translate применяет своё действие к следующей после неё фигуре; их можно написать в одну линию или перенести на разные строки; важно, чтобы их не разделяла точка с запятой).
Вычтем из сферы куб при помощи команды difference. Обратите внимание на синтаксис команды: она принимает в качестве аргументов две геометрических фигуры, которые следуют одна за другой внутри фигурных скобок, и вычитает из первой фигуры вторую. Получили полусферу — это будет туловище нашего робота.
Уберём на время код для туловища в безопасное место и нарисуем голову. Добавляем цилиндр при помощи команды cylinder с высотой 26 мм (h=26) и радиусом 23 мм (r=23).

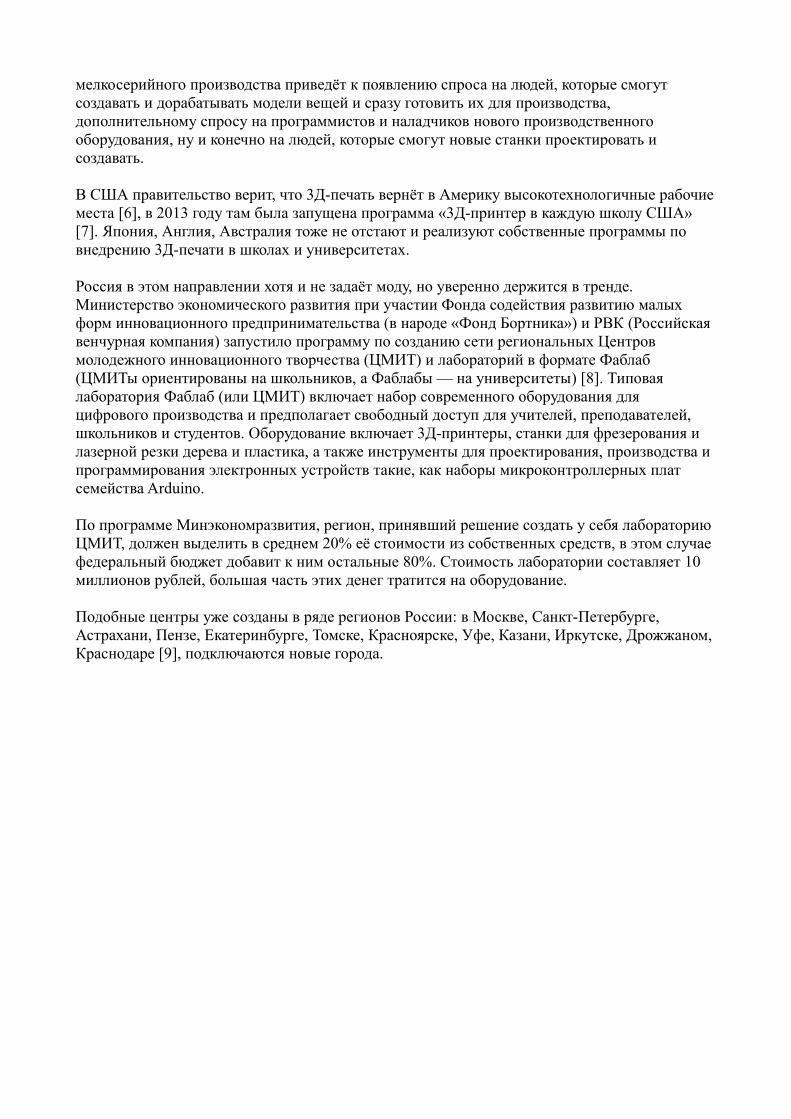
Сплюснем, то есть масштабируем цилиндр наполовину по оси x при помощи команды scale (команда scale применяет своё действие к следующей за ней геометрической фигуре также, как команда translate; важно, чтобы между ними не было разделителя точки с запятой).
Добавим треугольный рот — призма с треугольником в основании. Создаётся в два этапа: на плоскости (x, y) рисуется двумерный треугольник при помощи команды polygon, и потом этоттреугольник «выдавливается» наверх на 27 мм в призму при помощи команды linear_extrude.
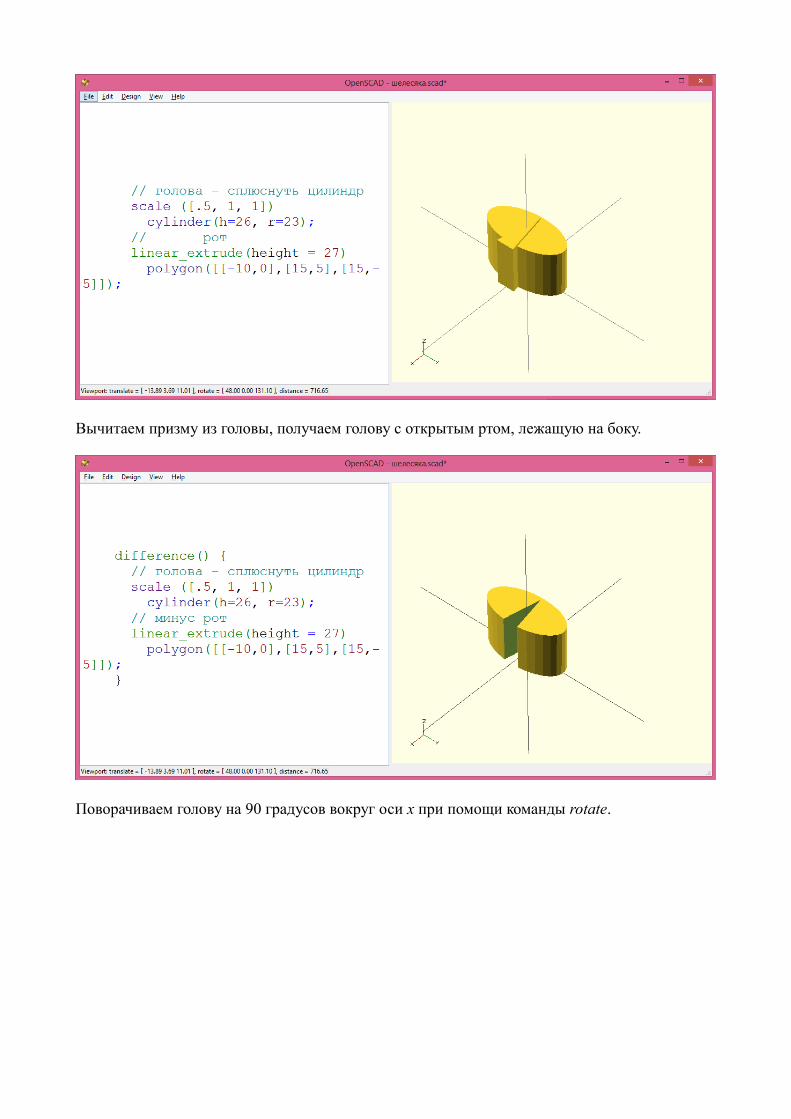
Вычитаем призму из головы, получаем голову с открытым ртом, лежащую на боку.
Поворачиваем голову на 90 градусов вокруг оси x при помощи команды rotate.

И поднимаем наверх при помощи уже известной команды translate (обратите внимание, как записана цепочка вызовов: rotate применяется к результату difference, translate в свою очередь применяется к результату rotate).
Вернем обратно тело, посмотрим, что получается.

И опять всё спрячем вместе с головой, будем рисовать ногу.
Нога состоит из одного тонкого длинного цилиндра, коленного сустава в виде шара и ступни в виде половины шара. Мы уже умеем рисовать и манипулировать всеми этими фигурами.
Теперь мы хотим нарисовать вторую ногу, для этого сделаем небольшой фокус. Так как у нас обе ноги абсолютно одинаковые, мы хотим использовать код уже нарисованной первой ноги для того, чтобы нарисовать вторую. Можно просто скопировать код первой ноги и вставить рядом, но это не самый удачный подход. Вместо этого мы обозначим код, рисующий одну ногу, как модуль (или подпрограмму) при помощи ключевого слова module и дадим ему имя «leg» (то есть «нога», имя может быть любым). После того, как мы поместили процедуру рисования составного объекта в модуль, мы можем вызывать его по имени в коде модели сколько угодно раз и применять к нему уже известные нам трансформации типа вращения и перемещения абсолютно также, как мы делали с базовыми геометрическими фигурами (примитивами).

Нарисуем две ноги и должным образом разместим их на сцене.
Аналогичным образом нарисуем две руки.
Вернём тело и голову, робот почти готов.
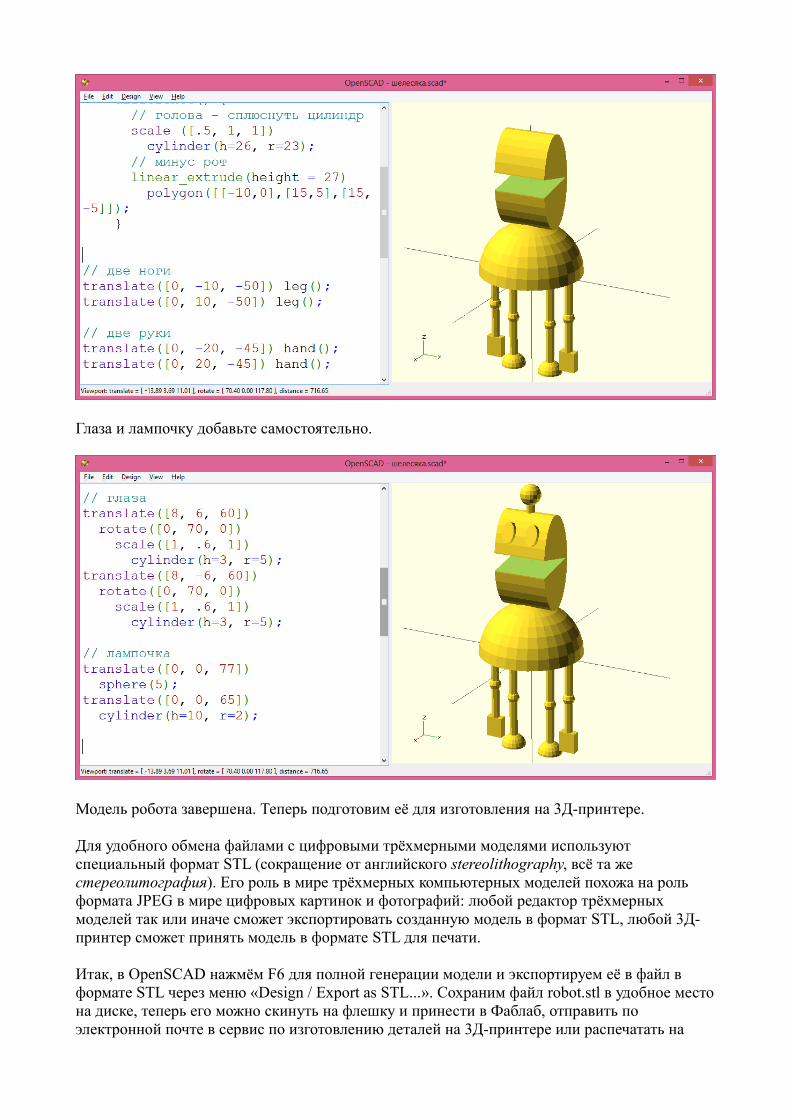
Глаза и лампочку добавьте самостоятельно.
Модель робота завершена. Теперь подготовим её для изготовления на 3Д-принтере.
Для удобного обмена файлами с цифровыми трёхмерными моделями используют специальный формат STL (сокращение от английского stereolithography, всё та же стереолитография). Его роль в мире трёхмерных компьютерных моделей похожа на роль формата JPEG в мире цифровых картинок и фотографий: любой редактор трёхмерных моделей так или иначе сможет экспортировать созданную модель в формат STL, любой 3Д-принтер сможет принять модель в формате STL для печати.
Итак, в OpenSCAD нажмём F6 для полной генерации модели и экспортируем её в файл в формате STL через меню «Design / Export as STL...». Сохраним файл robot.stl в удобное местона диске, теперь его можно скинуть на флешку и принести в Фаблаб, отправить по электронной почте в сервис по изготовлению деталей на 3Д-принтере или распечатать на

собственном 3Д-принтере, если он у вас уже есть.
При работе с 3Д-принтером обычно используют специальную программу, которую предлагает производитель принтера. Она позволит импортировать трёхмерную модель из файла STL и настроить параметры изготовления изделия: разместить модель на рабочей области, выбрать качество и скорость печати, процент внутреннего заполнения изделия пластиком и так далее.

Трёхмерная модель, загруженная в программу Polygon для подготовки к изготовлению на 3Д-принтере PICASO 3D Designer
Затем из модели с учетом дополнительных параметров генерируется задание для принтера и устройство начинает работу: слой за слоем выращивает модель, рисуя контуры тонкой ниткойрасплавленного пластика.
3Д-принтер выращивает изделие по трёхмерной модели
Через пару часов получаем готовое изделие.

Теперь вы умеете создавать виртуальные трёхмерные модели и превращать их в настоящие предметы. Однако помните, что и 3Д-редактор, и 3Д-принтер — это всего лишь инструменты: они помогут воплотить ваши замыслы, но источником идей для творчества являетесь вы сами.
Ссылки
[1] Selective Laser Sintering, Birth of an Industry, Alex Lou & Carol Grosvenor from interviews with Dr. Carl Deckard, Dr. Joe Beaman, and Dr. Dave Bourell, 7 декабря 2012 http://www.me.utexas.edu/news/2012/0712_sls_history.php[2] Patents and 3D Printing, Paul Banwatt, 20 февраля 2013, http://lawitm.com/post-one-part-one-patents-and-3d-printing/[3] 3D Printing and Robotics—Disrupting the Dominant Supply Chain Model, Dr. Michael Watson,27 августа 2013, http://www.scdigest.com/EXPERTS/DRWATSON_13-08-27.PHP?cid=7350&ctype=content[4] Gartner Says Smart Machines Will Have Widespread and Deep Business Impact Through 2020, 10 октября 2013, http://www.gartner.com/newsroom/id/2605015[5] Robots Create Jobs, IFR International Federation of Robotics, 2013, http://www.ifr.org/robots-create-jobs/[6] President Barack Obama's State of the Union Address -- As Prepared for Delivery, 12 февраля 2013, http://www.whitehouse.gov/the-press-office/2013/02/12/president-barack-obamas-state-union-address[7] MakerBot Academy and America’s Classrooms, an educational mission to put a MakerBot Desktop 3D Printer in every school in the United States of America, 12 ноября 2013, http://www.makerbot.com/blog/2013/11/12/announcement-makerbot-academy-and-americas-

classrooms/ [8] Эксперты РВК и МИСиС при содействии АИРР разработали рекомендации для создания российских ЦМИТ, 15 июня 2012, http://www.rusventure.ru/ru/press-service/news/detail.php?ID=10829&sphrase_id=50892[9] Мы будем делать ЦМИТ. Опыт создания, перспективы, Анатолий Гармашов, 26 декабря 2013, http://megamozg.ru/post/2006/[10] Итоги форума «Дни робототехники в г. Сочи»: ключевые игроки, заинтересованные в развитии робототехники, договорились о совместных действиях, 27 ноября 2014, http://edurobotics.ru/archives/1633[11] 13 Key developments in the 3D printing industry, Leslie Langnau, 7 июня 2012, http://www.makepartsfast.com/2012/06/3855/13-key-developments-in-the-3d-printing-industry/
Полезные ресурсы
[1] Фаблаб МИСиС http://fablab77.ru[2] Фаблаб Политех (СПбГПУ) http://fablab.spbstu.ru/[3] Робототехнический конструктор ТРИК http://trikset.com/[4] Робототехнический конструктор ScratchDuino http://scratchduino.ru/[5] Международный открытый проект RepRap http://reprap.org/[6] Производитель 3Д-принтеров MakerBot http://makerbot.com/[7] Производитель 3Д-принтеров Picaso 3D http://scratchduino.ru/[8] Производитель 3Д-принтеров RUBOT http://www.rubot.org/[9] Производитель 3Д-принтеров Formlabs http://formlabs.com[10] 3Д-САПР OpenSCAD http://www.openscad.org/