,:. bob revue europeenne des elements...
TRANSCRIPT
,:. boBRevue europeenne des elements finis
Sommaire Volume 12 - n° 6/2003
ESTIMA TEURS D'ERREUR POUR LES ANALYSES ELEMENTS FINIS
L. GALLlMARD, J.-P. PELLE
Editorial . . . . . . . . .
S. PRUDHOMME, J. TINSLEY ODEN
Estimation des erreurs de discretisation pour des problemesde mecanique . . . . . . . . . . . . . . . . . . . . . . . .
P. DfEz, I. MORATA, A. HUERTA
Goal-oriented adaptivity for shell structures. Error assessmentand remeshing criteria . . . . . . . . . . . . . . . . . . . . . .
663
665
691
B.Trn,D.AUBRY,A.BoULLARD
Adaptive computation for elastic wave propagationin plate/shell structures under moving loads .. . . .......... 717
M. KEMPENEERS, P. BECKERS, J. P. MOITINHO DE ALMEIDA,
O. J. B. ALMEIDAPERElRA
Modeles equilibre pour l'analyse duale . . . . . . . . . . . . . . . . . . . . 737
E. FLORENTIN;L. GALLlMARD, J.-P. PELLE
Etude de la qualite locale de differentes versionsde l'estimateur d'erreur en relation de comportement
Volume 12 - n° 6/2003
761

Estimation des erreurs de discretisationpour des problemes de mecanique
Serge Prudhomme - J. Tinsley Oden
Institute for Computational Engineering and SciencesThe University of Texas at AustinI University Station, C0200Austin, Texas 78712 - U.sA.fserge,oden}@ices.utexas.edu
REsuME. Cette notice presente des estimateurs d' erreur dans des grandeurs specifiees pour descalculs elements finis de prob/emes d' elasticite lineaire et de vibrations. II est montre pour cesapplications que /' erreur dans une grandeur specifiee peut etre exprimee en termes des erreurs,dans la norme en energie, dans les approximations des prob/emes primal et dual. Le calculd' estimateurs et de bornes pour /' erreur dans une quantite d' interet peut alors se realiser enfaisant usage d' estimateurs globaux connus. Quelques experiences numiriques prouvent de /abonne peiformance de cette approche.ABSTRACT. This paper presents goal-oriented error estimators for finite element analysis of lin-ear elasticity equations and eigenvalue problems. In these applications. it is shown that theerror in the quantity of interest can be expressed in terms of the errors in the energy norm inthe approximations of the primal and dual problems. Computable estimators and bounds forthe error in the quantity of interest are then derived making use of known global estimators.Performance of this approach is demonstrated on several test problems.MOTS·CLES : estimation d' erreur dans des grandeurs specif;ees, methodes residuelles, bornesin[erieure et superieure. elasticiti lineaire, vibrations.KEYWORDS: goal-oriented error estimation, residual method, lower and upper bounds, linearelasticity, vibrations.
REEF -1212003. Estimateurs d'erreur, pages 665 a 689
2. Preliminaires
2.1. Probleme d'elasticite lineaire statique
Notre motivation a long terme sera d'etudier l'evolution dynamique d'un milieusolide elastique occupant la region bomee n de I' espace IR3 et de frontiere an. Dans Iecas de petites deformations, les champs de deplacement u = u(x, t) et de contrainteu = u(x, t) verifient dans n l'equation d'equilibre et la relation de comportementlineaire suivantes :
une breve description de la methodologie pour I'estimation des erreurs dans des gran-deurs s¢cifi~s que nous appliquons aux deux problemes consideres dans la presentenotice. Nous formulons alors dans la section 4Ies estimateurs d' erreur, et en particulierles barnes inferieure et superieure sur l'erreur dans les quantit6s d'interet. Les resuI-tats theoriques sont illustres par quelques experiences numeriques dans Ia section 5,lesquelles permettent de mettre en evidence I'efficacite des estimateurs presentes ici.Finalement. nous concluons dans la section 6 par quelques remarques et suggestions.
(I)
(2)
(4)
pattu-V'·u=f
u(u) = E €(u)
Dans Ie cas statique,les champs de deplacement et de contrainte ne dependant plusdu temps, Ie precedent probleme se reduit a chercher u = u(x) tel que:
-\I. u(u) = f, in n }u = 0, on rd
u .n= g, on rt
oil u( u) satisfait bien sur la relation de comportement (2).
aU p designe la masse volumique, f la densite volumique d'effort sur Ie domaine n,E l' op6-ateur de Hooke relative au materiau, et € Ie champ de deformation:
1€(u) = 2 (V'u + (V'u)T) (3)
D'autre part, nous supposons que Ie milieu solide est soumis au champ surfacique dedeplacement nul sur une partie r d de la frontiere an et au champ surfacique d'effort9 sur la partie complementaire r t, c' est-a-dire r d n r t = 0 et r d Ur t = an. Entin,a l'instant initial to, l'etat du milieu solide est suppose donne par u(', 0) = Uo etatu(·,O) = Vo·
Nous reportons l'etude de ce systeme a une date uJterieure et nous nous concen-trons a present a l'estimation des erreurs de discretisation dans Ie cadre de deux sous-problemes, a savoir Ie probleme d'elasticite lineaire statique et Ie probleme de vibra-tions.
1. Introduction
Toute approximation elements finis d'un probleme d'equations aux d6rivees par-tielles contient inevitablement des erreurs de discretisation. n est donc souhaitabled'avoir a disposition des outils qui permettent de les estimer et. eventuellement. deles contrOler par adaptation demaillage.Mais l'idee d'6valuer l'erreur directementconduit generalement A un probleme aussi couteux que celui de calculer la solutiondu probleme EDP. L'objectif dans l'estimation d'erreur consiste donc Ii estimer desgrandeurs de I'erreur plutot que I' erreur elle-meme. Nombre de travaux se sont consa-cres jusqu'a maintenant a l'etude d'estimateurs dans des normes du type energie (voirpar exemple les ouvrages [VER 96, AIN 00, BAB 0 I, LAD 0 ID. Cependant, apresavoir realise que ces mesures ne repondaient pas aux besoins des utilisateurs, car tropabstraites, de nouvelles methodes ont ete developpees recemment avec pour objectifd'estimer les erreurs dans des grandeurs ou quantites d'interet ayant un sens physique.De telles grandeurs peuvent etre definies par exemple comme la moyenne du deplace-ment dans une sous-region du milieu solide, comme I'une des composantes du champde contrainte en un point critique, ou bien encore, dans Ie cas de vibrations, commeI'une des frequences propres.
Des resultats precurseurs sur ce sujet sont apparus des 1984 dans [GAR 84), maisce n'est qu'a partir des travaux de Johnson et al. [JOH 92, ERI 95) et de Beckeret Rannacher [BEC 96] que de telles methodes ont suscite un reel inten~t, voir parexemple [pAR 97, CIR 98, RAN 98, STR 00a, ODE 01, ODE 00, WAL 01, LAR 02,BON 02). L'approche est maintenant bien comprise, dans Ie sens ou it est necessairepour obtenirdes estimateurs dans Ies quantites d'interet de resoudre un probleme dual.Par contre, la oilles differentes methodes divergent, c' est dans la maniere dont est ap-proximee la solution de ce probleme dual, et plus encore, dans la maniere dont esttraitee a posteriori cette approximation. En effet, la performance de ces estimateursdepend essentiellement de la precision avec laquelle la solution duate est obtenue.Nous voulons montrer ici que dans certaines situations, il est interessant d'approxi-mer celle-ci dans Ie meme espace elements finis qui est utilise pour approximer lasolution du probleme primal, et d'avoir recours a des estimateurs d'erreur dans lanorme energie pour les deux solutions eh~ments finis, Ie principal avantage de cetteapproche etant de pouvoir reutiliser des methodes connues et eprouvees depuis long-temps. Dans cette notice, no us appliquons la methodologie au probleme d'elasticitelineaire et au probleme de vibrations dans un milieu solide, notre motivation etant desynthetiser certains resultats presentes auparavant dans [PRU 03, ODE 03]. Dans Iecas du probleme de vibrations, nous nous interesserons uniquement a l'estimation deserreurs dans les frequences propres. Des theories similaires ont ete egalement presen-tees dans [MAD 99, CHA 99, BEC 01]. Nous citons aussi les travaux de Ladeveze etai, sur ce sujet dont l'approche est basee sur Ie traitement a posteriori du quotient deRayleigh (voir par exemple [LAD 01]).
La notice est organisee comme suit: dans la section 2, nous presentons les pro-blemes d'elasticite lineaire et de vibrations, leur formulation variationnelle, ainsi queleur discretisation par la methode des elements finis. Dans la section 3, nous donnons

2.2. Probleme de vibrations
oil. les pulsations propres w et frequences propres f se deduisent de >.par w = v'X etf ~ v'X/27r.
Si I'on considere des perturbations de la forme u(x)eiwt et u(x)eiwt it la solutionde (1), par exemple dues it des perturbations dans les conditions initiales, Ie calculdes vibrations revient it rechercher les valeurs propres A et modes propres associesu = u(x), u non nuIs, tels que:
-v· u(u) = Apu,;nQ }
u=O, onrdu'n=O, on rt
(5)
La normalisation M(u, u) = 1 pennet d'assurer l'unicite du vecteur propre u asso-cie a chaque A. D'autre Part. puisque les formes bilineaires sont symetriques et defi-nies positives, nous savons que Ie probleme admet une suite denombrable de valeurspropres An, toutes strictement positives, et telles que limn __co An = +00. Enfin. Ieprobleme (8) peut etre egalement obtenu en minimisant Ie quotient de Rayleigh definipour tout v =1= 0 par R(v) = B( v, v) / M (v, v). Chaque valeur propre A et modepropre u associe verifient alors :
B(u,u)>. = R(u) = M(u, u) (9)
En introduisant la forme semi-lineaire A(-;.) definie sur (V x JR) x (V x JR) :
A«u, A); (v,µ» = -B(u, v) + >'M(u, v) + µ[M(u, u) - 1] (10)
2.3. Formulations variationnelles
(11)
(12)
(13)
(14)et M(uh, Uh) = 1
'r/ v E Vh, B(Uh, v) = F(v)
'r/ (v,µ) E V x JR, A«u,>.); (v,µ» = 0
'r/(V,µ)EVhxJR, A«Uh,>'h),(V,µ»=O
'r/ v E Vh, -B(uh, v) + AhM(uh, v) = 0
nous pouvons egalement ocrire Ie probleme (8) dans Ia forme compacte suivante :
Trouver (u, >') E V x JR tel que:
tandis que Ja recherche des valeurs et modes propres discrets revient a resoudre Ieprobleme de dimension finie :
Trouver (Uh,>'h) E Vh x JR tel que:
Nous utilisons ici la convention usuelle selon laquelle Ie point virgule indique que Aest lineaire en (v, µ) mais eventuellement non lineaire par rapport a (u, >.).
2.4. Discretisation par IUments finis
Soit f2h une partition de f2 en Ne elements. Nous construisons un espace elementsfinis Vh C V a partir de fonctions continues, polyn6miales par morceaux, et de degrePK sur chaque element K. La discretisation par elements finis du probleme statiquepermetde:
Trouver Uh E Vh tel que:
cette derniere equation pouvant etre reecrite. tout comme pour Ie probleme continu :
Supposons maintenant que >'hsoit une approximation de la valeur propre A. PuisqueVh C V, et que>. est un minimum du quotient de Rayleigh sur V. nous en deduisonsimmediatement que A $ Ah.II suit que >'hest une borne superieure a >.et que l'erreurA - Ah est necessairement negative.
(7)
(8)et M(u,u) = 1
'v'VEV, B(u,v)=F(v)
Nous introduisons tout d'abord I'espace vectoriel V des champs de deplacementadmissibles :
V = {v E (H1(f2»3; vex) = 0, x E rd} (6)Nous denotons les formes bilineaires B(.,.) et M(·,.) definies sur V x V:
B(u,v) =1\7v: EVudx
M(u,v) =1pv· udx
et la forme Iineaire continue sur V :
F( v) = r f· v dx + r g. v dsJn Jr,Nous munissons l'espace V de la norme IIvllB = .jB(v, v), communement appeleenorme en energie puisque la quantite B(u, u) vaut simplement Ie double de I'energiede deformation.
La formulation variationnelle du probleme statique se pose donc :Trouver u E V tel que:
Similairement, la formulation variationnelle du probleme aux valeurs propres re-vient a resoudre :
Trouver u E V et >. E JR tels que:
'r/v E V, B(u,v) = AM(u,v),

3.. Erreur,i de discretisation
3.1. Remarques priliminaires
3.2. Approche genirak
Nous montrerons egalement dans eette section que pour les problemes d'elasti-cite lineaire et de vibrations, Ies erreurs £ peuvent aussi etre donnees en fonction del'erreur U - Uh dans la norme en energie.
(20)
(21)
(22)
"Iv E V
VVE V
s = {z E Vj B(zjv) = :F(v), "Iv E V}
B(u; v) = :F(v),
B'(uj v, w) = Q'(u; v),
ou
Trouver U E V tel que
Q(u) = inf Q(z)zES
de u. Par quelconque, nous entendons que Uh n' est pas necessairement une solutionelements finis par la methode de Galerkin du probleme (19). L'objectif est maintenantde mesurer l'erreur £ = Q(u) - Q(Uh). Notons que dans Ie cas particulier ou Q estIineaire, nous avons £ = Q(e) avec e = U - Uh.
Le point de depart consiste ici, en suivant l'approche de Becker et Rannaeher[BEC 01J (genernlisee au cas de l'estimation des erreurs de modele dans [ODE 02]),a considerer Ie probleme de minimisation:
Nous remarquons que si Ie probleme (19) admet une solution unique, l'ensemble Sse reduit a un singleton et Ie probleme de minimisation est aIors trivial. Les equationsd'Euler-Lagrange associees a (20) s'ecrivent :
ou B' (.j " .) et Q' (.j .) denotent les derivees de Frechet :
. 1B'(ujv,w) = lim -O{B(u+Ov;w) -B(u;w)}
9--0
Q'(Uj v) = lim _01{Q(u + Ov) - Q(u)}
9-0
La premiere equation dans (21) represente Ie probleme primal (19). La deuxieme equa-tion definit Ie prob1eme dual ou adjoint avec w E V comme inconnue. Nous avonspris coutume d'appeler w la fonction d'inftuence car elle indique l'inftuence du re-siduel associe au probleme primal np(v) = F(v) - B(Uh; v) sur l'erreur £ (voirresultat ci-dessous). Certains auteurs preferent simplement I' appeler la solution duale.
Le resultat ci-dessous (nous suggerons les references [BEC 01, ODE 02J pour unedemonstration detaillee de ce resultat) nous donne alors une nouvelle representationde I'erreur dans la grandeur specifiee Q :
. i:
(15)
(16)
nh(V) = F(v) - B(Uh,V)
n,,«V,ll» = -A«Uh, Ah); (v,µ»
Dans la suite de la notice, nous nous interessons a l'estimation des erreurs nume-riques produites par la discretisation elements finis, c'est-a-dire aux erreurs U _ Uhpour les problemes d'elasticite lineaire statique, et (u - Uh, A - Ah) pour les pro-blemes de vibrations. Les erreurs d'integration, de resolution des systemes Iineaires.de representation du domaine n par elements (nous supposons en fait que nh = n)seront ici negligees.
Nous souhaitons ici estimer les erreurs dans des grandeurs qui peuvent s' exprimersous forme de fonctionnelles Q(.), lineaires ou non Iineaires, des solutions U ou (u, A)des problemes continus. En bref, des estimateurs de l'erreur £ = Q(u) _ Q(Uh) OU
£ = Q«U,A» - Q«Uh,Ah)) nous permettraient alors d'evaluer la precision deQ(Uh) ou de Q«Uh, Ah» et de controler eventuellement ces erreurs par adaptationde maillage,
Nous allons montrer dans cette section que I' erreur £ peut en fait etre representeeen fonetion de residuels, ee qui nous parait logique puisque Ie residuel s'interpretecomme la source des erreurs numeriques. Pour Ie probleme statique et Ie probleme devibrations, Ie residuel s' ecrit respectivement :
Nous citons des main tenant une propriete fondamentale que verifie Ie residuel, sou ventdenommee la propriete d'orthogonalite ou de Galerkin. Si Uh et (Uh, Ah) sont lessolutions de (12) et de (14), alors respectivement:
nh(V) = 0, V v E Vh (17)
nh«V,µ» = 0, V (v,µ) E Vh X lR (18)
ou B(Uj v) est une forme semi-lineaire et :F( v) une forme Iineaire continue sur V.Dans un premier temps, nous considerons une approximation quelconque Uh E Vh
Nous rappelons brievement la methodologie qui nous permettra de calculer leserreurs dans des grandeurs Q. Dans ce but, nous introduisons Ie probleme abstrait : (23)
Trouver U E V tel que: V v E V; B(u; v) = :F(v) (19)
I £ = Q(u) - Q(Uh) = np(w) + 6.8 + 6.Q Iou les termes 6.8 et /:"Q seront negliges par la suite, puisqu'ils font intervenir lesderivees secondes et troisiemes de B et Q respectivement, et sont done des quantitesdu deuxieme et troisieme ordre de I'erreur e (a condition bien sUr que l' erreur soitpetite).

Dans ce cas, puisque Ie residuel est une forme lineaire et satisfait la condition d'ortho-gonalite, nous avons : .
Nous observons que (23) exprime E en fonction de la solution exacte W du pro-bleme dµa1. Cette expression peut etre simplifiee si I' on dispose des solutions elements'finis Uh et Wh des problemes primal et dual, respectivement:
3.3. Application au probUrIU d'i1asticiti lin/Dire stotique
Dans ce cas nous avonsB(ujV) = B(u,v), et puisque B("') est une formebilineaire, nous avons egalement. B'(uj v, w) = B(v, w) et b.8 = O. Si, en outre, Qest une forme lineaire, alors Q'(u;v) = Q(v) et b.Q = O. Les problemes primal et
dual s' ecrivent donc :B(Uh;V) = .r(v),
B'(Uh;V,Wh) = Q'(Uh;V),
'V v E Vh
'V v E Vh(24)
B(u, v) = F(v),B(v, w) = Q(v),
'VvEV
'VvEV(27)
REMARQUE. - De cette demiere equation, nous prouvons en quelque sorte que:
E = Q(Uh + e) - Q(Uh) ~ 'R.p(e)
'R.p(W) = 'R.p(W - Wh + Wh)
= 'R.p(W - Wh) + 'R.p(Wh)
= 'R.p(W - Wh)
De fait, nous substituons au probleme d'evaluer rerreur e pour estimer E celui decalculer e, qui a premiere vue semble de difficulte comparable. Neanmoins,a la diffe-rence du probleme primal, Ie probleme dual est toujours lineaire, ce qui peut simplifierl'estimation de e. D'autre part, l'avantage de la representation 'R.p(e) vient du fait queIe residuel est une forme integrale definie sur tout Ie domaine n. Cette integrale peutdonc etre d6composee en integrales definies sur chaque element K du maillage. Noussommes alors en mesure de calculer des contributions par e16ment a I' erreur E, les-queUes peuvent servir d'indicateurs de raffinement dans une strategie d'adaptation demaillage.REMARQUE. - Certains auteurs, plutot que de considerer W h, prererent introduire lafonction 'lrhW E Vh, 'lrhdefinissant un operateur d'interpolation ou de projection deV dans Vh, de sorte que;
(32)
(31)
(29)
(28)E = Q(e) = nh(W)
e = ~lIse + s-leIl1- ~lIse + s-lE111
Dans ce cas particulier, a savoir que B(·,·) est un produit scalaire sur V, puisquesymetrique et definie positive, nous pouvons reecrire B(e, e) comme :
r
nous obtenons la nouvelle representation de l'erreur:
£ = B(e,e)
ou s est un nombre reel quelconque. Par la suite, s sera d6fini par une approximationde AeIlB/lieIlB, cette demiere quantite minimisant les termes lise + s-le\lB et
lise + 5-1eIlB'
Si d'autre part, nous considerons les solutions elements finis Uh et Wh comme lesapproximations de u et W par la methode de Galerkin, alors nous avons :
E = nh(W - Wh) = 'R.h(e)
Finalement. puisque l'equation qui gouveme l'erreur d'approximation e dans Uh est
donnee par: B(e,v) = 'R.h(V) (30)
et l' erreur E est donnee par :
(25)., E = Q(u) - Q(Uh) = 'R.p(e) + b.B + b.Q Ide telle sorte que (23) devient, en introduisant l'erreur e = W - Wh :
Nous remarquons que ce resultat ne fait pas intervenir directement la solution elementsfinis Wh. Cependant, puisque W n'est connue explicitement que dans de rares occa-sions, la difference W - 'lrhwest calculee en approximant W dans un espace elementsfinis plus riche que Vh, en utilisant la methode p par exemple, ou bien en se servant del'information foumie par Wh, par exemple en utilisant des methodes d'interpolationde Wh par des fonctions polyn6miales de degre plus eleve. Diverses methodes sontproposees dans [LAR 02, BEC 0 I].
A«u,>'); (v, µ)) = 0,A' «u, >.); (v, µ), (w, .,p)) = Q'«u, >.); (v, µ)),
'R.p(W) = 'R.p(w - 'lrhW) (26)I1-
3.4. Application au probleme de vibrations
Dans ce cas, u est remplace par (u, >.). v par (v, µ). et la forme semi-lineaireB(u; v) par A«u, >.); (v, µ)). Les problemes primal et dual s'ecrivent alors :
'V (v,µ) E V x lR. (33)
'V (v,µ) E V x lR.
.-,----. ------- - -----
De la meme maniere, on peut montrer que l'approximation elements finis de (w, 'IjJ)est donnee par (Wh, 'ljJh)= (Uh, 0) lorsque (Uh, Ah) est solution de (14). Auquel casil suit que:
Nous nous interessons ici au cas ou la quantite d'interet est une valeur propre A. Cecisignifie que Q«u, A)) = A, et puisque Q est une forme lineaire, nous avons imme-diatement Q'«u, A); (v,µ» = Q«v,µ)) = µetAQ = O.
Tout d'abord nous remarquons que la paire (w, 'IjJ)= (u,O) est solution du pro-blcme dual. En effet :
A'«u, A); (v, µ), (u, 0)) = -B(v, u) + AM(v, u) + µM(u, u)
= A«u, A); (v,µ» + µ
=µ
oil la fonction d'influence est mOOntenantla poore (w, 'IjJ)E V x lR, et oil :
A'«U,A);(V,µ), (w,'IjJ» =
- B(v, w) + AM(v, w) + 2'IjJM(u, v) + µM(u, w)
si bien que, en utilisant (36) et (39) :
A - Ah = -B(e, e) + AM(e, e)
4, Estimateurs d'erreur dans les grandeurs specifiees
Nous avons montIi dans la section precedente que Ie problcme de l'estimationd'erreur dans des grandeurs specifiees pouvaient dans certains cas se resumer a l'es-timation d'erreur dans la norme en energie. Ceci presente l'avantage de pouvoir uti-liser des methodes connues et eprouvees comme par exemple les methodes expli-cites [VER 96], les methodes residuelles implicites, par element [BAN 85, LAD 01,AIN 97] (avec ou sans equilibrage) ou par sous-domaines [CAR 00, MOR 01], ainsique les methodes dites de lissage [ZIE 92a, ZIE 92b].
Dans cette notice, nous utilisons une methode residuelle par element sans equili-brage [BAN 85], qui nous apparaIl comme un bon compromis entre precision et effica-cite, s¢cialement pour des calculs en dimension trois. Nous rappelons succinctementla methodologie pour obtenir des homes superieure et inferieure a I' erreur IIe IIB pourIe probleme d'elasticite lineaire statique. Puis nous appliquons ces resultats a l'esti-marion d' erreur dans des grandeurs Q pour les problemes d' elasticite et de vibrations.
Nous aurions pu arriver directement a ce resultat en manipulant judicieusement lesequations (8) et (14).
(36)
(35)
(34)
£ = Rh«e, 0» + AA
(w,t/;) - (Wh,t/;h) = (u - Uh,O) = (e,O)
et nous avons alors :
A«u,A); (v,µ» - A«Uh, Ah); (v,µ)) = Rh«V,µ)) (37)
Maintenant, en partant de la definition du residuel, nous pouvons ecrire que pourtoute poore (v, µ) E V x IR:
A-AhA,A=-M(e,e)
2
D'autre part, comme M(u, u) = M(Uh, Uh) = 1 d'apres (8) et (14), nous pouvonsaisement montrerque M(e, Uh) = -M(e, e)/2, et donc :
4.1. Borne superieure
Soit un element K du maillage et WK l'ensemble des fonctions de fonne de degrePK + 1, oil PK designe Ie degre maximal sur K des fonctions polyn6miales utiliseespour Ie calcul de la solution elements finis. Soit e = U - Uh oil u et Uh sont Iessolutions de (7) et (12). Un estimateur de la nonne IlellB s'obtient en calculant lesfonctions 1/J K E WK sur chaque element K tel que:
BK(1/JK'V) = RK(V) + r 9-y,K·vds, 'v'VEWK (41)18Koil BK(-,') et RKO sont les restrictions de B(·,·) et RO sur K telles que:
BK(U,V) = L V'v: EV'udx
'RK(V) = r f·vdx+ r 9·vds- r V'v: EV'Uhdx1K 18Knrt 1Ket oil les flux 9-y,K sur chaque face 'Y de K sont donnes par :
{!(n. V'UIK - n· '\lulL) si 'Y = oK noL
9 K=-y, 0 si 'Y C on
(39)
(40)
A+AhRh«e,O» = -B(e,e) + ~M(e,e)
1£= A - A/t ~ -B(e,e) = -lIell~ IREMARQUE. - Des calculs simples mais fastidieux (qui impliquent de calculer lesd6rivees deuxicme et troisieme de A) nous permettent d'6valuer A,A comme :
Finalement, les quantites M(e, e) sont en general negligeables par rapport a B(e, e),ce qui nous amene Ie resultat:
Apres avoir developpe cette equation et substitue (e,O) a (v, µ), nous obtenons:
-B(e, e) + AM(e, e) + (A - Ah)M(Uh, e) = 'Rh«e, 0)) (38)
4.2. Borne inferieure
Nbus pouvons alors calculer l'estimateur 17<;UJlde l'erreur dans la norme en energie :
Nous soulignons ici que 17.up produit une borne superieure a l'erreur lIellB si les pro-blemes locaux (41) sont tous resolus exactement sur (Hi (K))3 prives des modes ri-gides (voir (PRU 03, TheOI'eme 4.3]). lei, puisque t/J K est evalue sur I'espace fini WK,
nous ne sommes pas garantis que TJsup soit une borne superieure. Neanmoins, les ex-periences numeriques nous ont montre que c'etait souvent Ie cas lorsque les maillagesetaient choisis suffisamment fins.
?]sup = .ILBK(tPK,tPK)K
(42)
ou'R'k et'R'K se referent aux residuels associes aux problemes dual et primal respectivement:
'Rh(V) = F(v) - B(Uh, v)'R~(v) = Q(v) - B(v, Wh)
Par combinaison lineaire, les bomes "superieures" a lise + s -1e" B et IIse - s -1e IIIsont donnees par :
17;tp = t I~ BK(StP~ + s-1tP'K, stP~ + s-ltP'K)Kr-
17~p = t I~ BK(s1/J'K - S-ltP'K, stP'K - s-1tP'K)K
(43)
La derivation d'une borne inferieure repose sur l'observation suivante (voir de-monstration dans [ODE 01]) :
IRh(V)1IlellB = sup -II II
VEV\{O} v B
Nous en deduisons que toute fonction X E V foumit une borne inferieure TJinf a 1'er-reur puisque :
avec:
)
1/2 (
,~( ~BK("'1(,"'1() I
Nous pouvons aussi construire des fonctions continues XU et XW, de sorte que Ie:
combinaisons sxu + S-lXw et sxu - S-lXW soient dans V, et donc :
Si ron suppose que TJ;tp et 'T1~p sont des bomes superieures garanties, nous obtenon:alors les bomes superieure et inferieure a l'erreur dans la quantile d'interet :
IsRU(sXU + S-lXW) + s-lR,w(SXu + s-lxW)1TJ+ - h hinf - Ilsxu +s-lxWIIB_ IsRh(sxU - S-lXW) - s-lR~(sxU - s-lxW)1
'T1int = IIsxu - s-lxwllB
"Iv E WK
"Iv E WK
Nous pouvons egalement obtenir une estimation de Q(u) - Q(Uh). soit en prenant I.moyenne de 'T1£p et 'T1~, soit en ne considerant que les bomes inferieures ou que Ie:bomes superieures, par exemple :
l'Rh(X)1TJinf = IIxII B ::; IIellB (44)
Dfez et al. ([DIE 03]) ont prouve 1'0ptimaJite de 17inf ainsi calculee, une fois don-nee la fonction x.Bien sUr, Ie choix X = ±e donne une estimation exacte. En pra-tique, on choisit de construire une fonction continue X a partir des fonctions localestP K' solutions de (41), lesqueUes sont discontinues a I'interface des elements puisquecalculees independamment les unes des autres. Cette procedure est expliquee en de-tail dans [PRU 01, PRU 03]. Des methodes similaires sont egalement presentees dans(BAB 99, STR OOb,DIE 03].
4.3. Estimateurs pour Ie probleme d'elasticite
Nous avons montre que l'erreur mesuree dans la quantite d'interet peut etre repre-senteeen fonction de lise + s-lgllB et lise - s-leIIH. OU e = U-Uh ete = W-Wh.Puisque les problemes primal et dual sont ici lineaires. nous pouvons bien sur estimere et e individuellement et combiner Ies resultats pour estimer les quantites ci-dessus.II suffit donc de trouver tP~ E WK et tP'K E WK telles que:
BK(1/J'K,V) = R'k(v) + ( g~,K' vds,18K
BK(1/J'K,V) = R'}«v) + { g~.K·vds,18K
OU:
TJj~f::; Q(u) - Q(Uh) ::; TJ2p
Q _ 1( +)2 1 - 2'T1inf - 4 TJoo - 4 (TJsup)
Q _ 1( + )2 1( - 217sup - 4 TJsup - 4 TJoo)
Q 1( +)2 1( _ )2Q(u) - Q(Uh) ;;::;j TJ = 4 TJsup - 4" TJ.up
(45
(46
(47

-~---_. ---.--.-- - .--.--
REMARQUE. - L'erreur dans la trequence propre fh = ..;>::h/(27r) peut se 'deduirede l'erreur dans la valeur propre -\h en utilisant un developpement limite de Taylor;nous avons alors :
. .Nous observons alors dans ce demier cas que:
17Q = !LBK(81/J'K + 8-11/J';, 81/J'K + 8-11/J';)4 K
1"B (~/.U -1~/.w ~/.U -1~/.W)- 4 ~ K 8o/K - 8 o/K,8o/K - 8 o/KK
= ~L 2BK(1/J'K, 1/J'K) + 2BK(1/J'K, 1/J'K)K
= ~BK(1/J'K,1/JK)K
REMARQUE, - Nous soulignons qu'il est possible de construire ici des bomes supe-rieure et inferieure car la forme bilineaire est symetrique et definie positive. Certainsdes resultats ci-dessus ne peuvent donc etre etendus a des cas plus generaux.
1 1f-fh~, ,.-(-\--\h)= 87r2fh(-\--\h)
et les bomes sur l' erreur en trequence sont donnees par :
1 2f - - ----r"i"" 17supTJinf - 87r J h
1 2J = -~f TJinfTJsup 87r h
(53)
(54)
4.4. Estimateurs pour Ie probleme de vibrations
Nous aurions pu obtenir ce resultat en considerant Q( (u, -\)) = ..;x/ (27r) = f au lieudeQ«u,-\)) =-\,
Une borne inferieure s'obtient apres construction d'une fonction continue X comme :
En definissant TJ~f = -17;up et 17~p = -TJ~, nous avons alors l'encadrement suivant:
Nous notons que Ie residuel ne depend ici que de la variable v puisque M( Uh, Uh) =llorsque (Uh,Ah) est solution de (14). Une bome superieure Ii IIellB est donneecomme auparavant par :
Nous rappelons d' apms Ie resultat (40) que I' erreur dans la valeur propre -\ - Ah aete obtenue en fonction de I' erreur IIe II B que nous estimons maintenant. En procedantcomme precedemment, nous cherchons d' abord Jes fonctions eJementaires 1/JK E WKtelIes que:
Auparavant, nous souhaitons commencer par quelques commentaires quant a laselection des espaces locaux WK definis sur chaque element K, Il est clair que la di-mension de ces espaces, c' est-a-dire Ie nombre de fonctions de forme (a multiplier partrois puisque Ie vecteur deplacement comprend trois composantes) qui seront utiliseespourresoudre les problemes auxiliaires (41), influenceront directement Ie cout de l'es-timateur d'erreur. Dans un soucis d'economie, il est donc souhaitable de minimiser Ienombre de ces fonctions, tout en s'assurant que la precision de la borne superieurene s'en trouve pas excessivement deterioree. Dans Ie cas de fonctions hierarchiques,nous ne prenons en general que les fonctions du type arete de degre p + 1 ou pestIe degre choisi pour calculer Uh ou Who Puisque un hexahedre presente douze aretes,nous avons donc douze fonctions d' arete quelle que soit la valeur de p. A titre de com-paraison, la dimension de l'espace complet des fonctions bulles de degre p +1 (toutesles fonctions associees aux aretes et faces, ainsi que celles definies sur I'interieur del'element) est donnee par Ia formule (p + 2)3 - (p + 1)3 = 3p2 + 9p + 7, Ainsi pourp = 1, nous disposerions de 19 fonctions, mais pour p = 3, de 61 fonctions, d'ouun coilt supptementaire non negligeable. Nous presentons dans Ie cas de la poutreencastree un exemple qui illustre I' influence du chou de WK.
NollS presentons ici quelques applications numeriques afin d'illustrer les resultatstheoriques developpes dans les sections precedentes. Nous avons considere un pro-bleme de poutre encastree, un probleme faisant intervenir un bras de controle, ainsiqu'une plaque plane pour des problemes de vibrations. Ces exemples ont ete dejapartiellement presentes dans [PRU 03, ODE 03].
5. Applications numeriques
(48)
(49)
(50)
(51 )
(52)
\:Iv E WK
l'Rh(X)1TJinf = IIxliB
17~f ~ A - Ah ~ 1]~p
TJsup = J1; BK( 1/JK';,p K)
BK(1/JK'V) = 'RK(V) + r 9"Y,K' vds,J8K
'Rh(V) = -B(Uh, v) - AhM(Uh. v)
ou'RK est la restriction a l'element K du residuel global:
Bomeinf. Borne sup. Bome sup. Estirnateur Erreur "exacte"
Maillage (<rretes) (<rretes) (huiles) (aretes) Q(u - Uh)4xlx2 0.201 0,269 0,351 0.235 0.380
8xlx2 0.095 0.149 0.213 0.122 0.168
16 x 2 x 4 0.022 0.052 0.084 0.036 0.054
32 x 4 x 8 0.002 0.013 0.021 0.007 0.015
Maillage Bomeinf. Bomesup. Estimateur Erreur "exacte"
4xlx2 -1041 547 -247 -308
8xlx2 -1899 1132 -134 -125
16 x 2 x 4 -1357 1251 -52 -39
32 x 4 x 8 -685 655 -15 -10
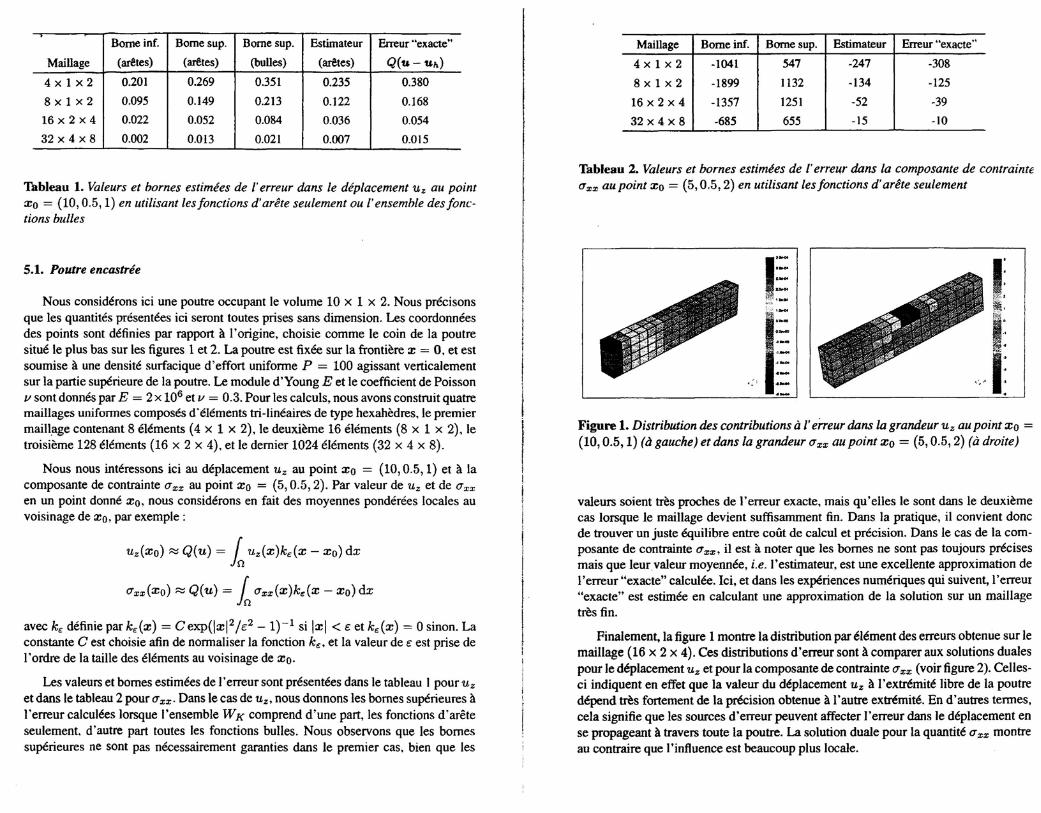
Thbleau 1. Valeurs et barnes estimees de ['erreur dans Ie deplacement Uz au pointXo = (10,0.5,1) en utilisant lesfonctions d' arhe seulement ou /' ensemble desfonc-tions bulles
Tableau 2. Valeurs et homes estimees de /' erreur dans la composante de cOlllrainte(j:r;:r; au point Xo = (5,0.5,2) en utilisant les fonctions d' arete seulement
Figure 1. Distribution des contributions a ['e;Teur dans la grandeur u z au point Xo =(10,0.5,1) (a gauche) et dans la grandeur (jxx au point Xo = (5,0.5,2) (a droite)
valeurs soient tres proches de l'erreur exacte. mais qu' elles Ie sont dans Ie deuxiemecas lorsque Ie maillage devient suffisamment fin. Dans la pratique, il convient donede trouver un juste equilibre entre cout de calcul et precision, Dans Ie cas de la com-posante de contrainte (jxx, it est a noter que Jes homes ne sont pas toujours precisesmais que leur valeur moyennee, i.e. I'estimateur, est une excellente approximation del' erreur "exacte" calculee. lei, et dans les experiences numeriques qui suivent, I' erreUI"exaete" est estimee en calculant une approximation de la solution sur un maillagetres fin,
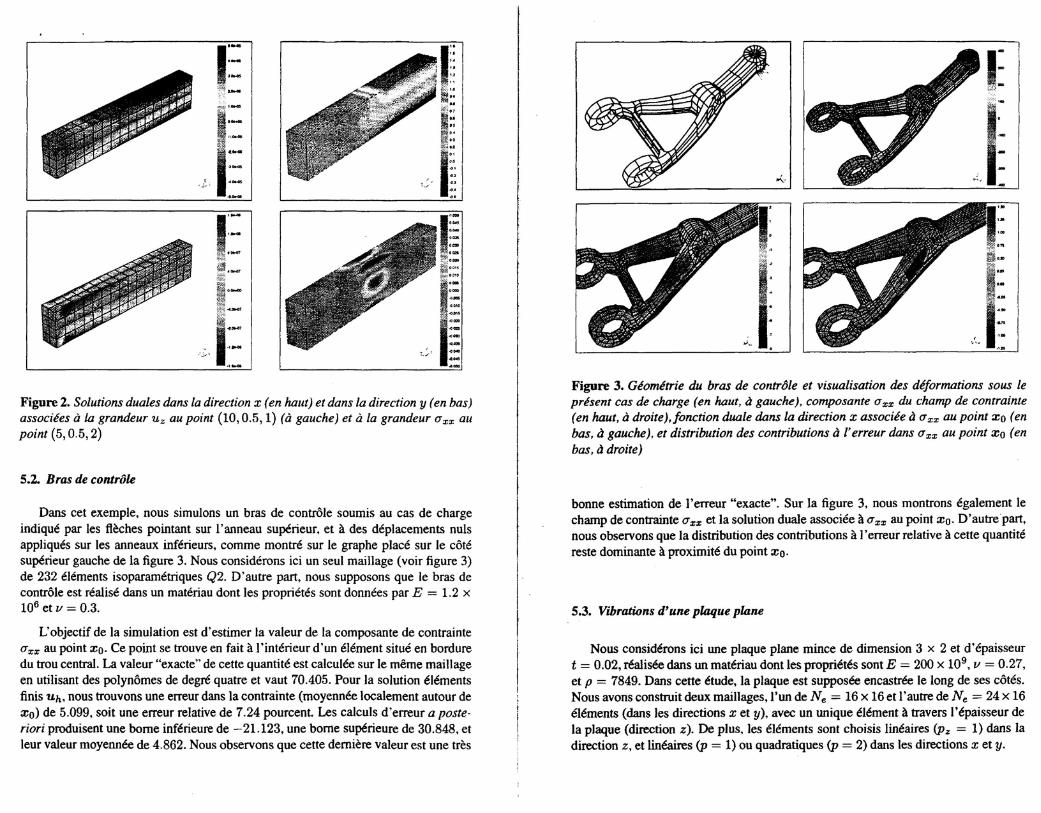
Finalement, la figure 1 montre la distribution par element des erreurs obtenue sur Iemaillage (16 x 2 x 4), Ces distributions d'erreur sont a comparer aux solutions dualespour Ie deplacement Uz et pour la composante de contrainte (jxx (voir figure 2). Celles-ci indiquent en effet que la valeur du deplacement Uz a l'extremite libre de la poutredepend tres fortement de la precision obtenue a l'autre extremite. En d'autres termes,cela signifie que les sources d'erreur peuvent affecter l'erreur dans Ie deplacement ense propageant a travers toute la poutre. La solution duale pour la quantite (jxx montreau contraire que I'influence est beaucoup plus locale.
I:~:l;':~J~,
I~,,·1:
1'-.-.-.-~:i;: , ....,-
uz(Xo) ~ Q(u) = In uz(x)kg(x - xo) dx
O'xx(xo) ~ Q(u) = InO'xx(x)kg(x - xo) dx
avec kg definie par kg(x) = Cexp(lxI2/c:2 _1)-1 si Ix\ < e et kg(x) = 0 sinon. Laconstante C est choisie afin de normaliser la fonction kg. et la valeur de c: est prise deI"ordre de la taille des elements au voisinage de Xo.
Les valeurs et bomes estimees de I' erreur sont presentees dans Ie tableau I pour uz
et dans Ie tableau 2 pour 0' xx' Dans Ie cas de uz, nous donnons les homes superieures al'erreurealculees 10rsque I'ensemble WK comprend d'une part, les fonctions d'areteseulement. d'autre part toutes les fonctions bulles, Nous observons que les bomessuperieures ne sont pa'i necessairement garanties dans Ie premier cas, bien que les
Nous considerons ici une poutre occupant Ie volume 10 x 1 x 2, Nous precisonsque les quantites presentees ici seront toutes prises sans dimension. Les coordonneesdes points sont definies par rapport a I' origine, choisie comme Ie coin de la poutresitue Ie plus bas sur les figures 1 et 2. La poutre est fixee sur la frontiere x = 0, et estsoumise a une densite surfacique d'effort uniforme P = 100 agissant verticalementsur la partie superieure de la poutre. Le module d'Young E et Ie coefficient de Poissonv sont donnes par E = 2 X 106 et v = 0.3. Pour les calculs, nous avons construit quatremaillages uniformes composes d'elements tri-lineaires de type hexahMres.le premiermaillage contenant 8 elements (4 x 1 x 2). Ie deuxieme 16 elements (8 x 1 x 2). Ietroisieme 128 elements (16 x 2 x 4), et Ie demier 1024 elements (32 x 4 x 8).
Nous nous interessons ici au deplacement Uz au point Xo = (10,0.5,1) et a lacomposante de eontrainte (j:r;x au point Xo = (5,0.5,2). Par valeur de Uz et de (jxx
en un point donne Xo, nous considerons en fait des moyennes ponderees locales auvoisinage de Xo. par exemple :
5.1. Poutre encastree
I""'...,......."'"
~aQ2li
f-:::;!UQO~OQI5~~~::
I:fX~-
I~;I:
Ih.~
~'"I.·~.·"IU.
180,"::.m,.
,c. ••
":xc
.'"....
.............
I"""'.
',"." :~~"~::;::~ ..@.....@iU
Ii\~'··~"".,.,....
1.
'- .-,-':~4'.; ......
I::¥\i.. "._~
1":4-......
.l~~ :
I'....,....\*':'DMJl'0/-:";•
~ ......'':i':<-;1~'\;m1.·/' .....f,%"?W'!:
Ilr:.:' ., ...... ...; ....
......
Figure 2. Solutions duales dans la direction x (en haut) et dans la direction y (en bas)associees a La grandeur Uz au point (10,0.5,1) (a gauche) et a la grandeur (1xx aupoint (5,0.5,2)
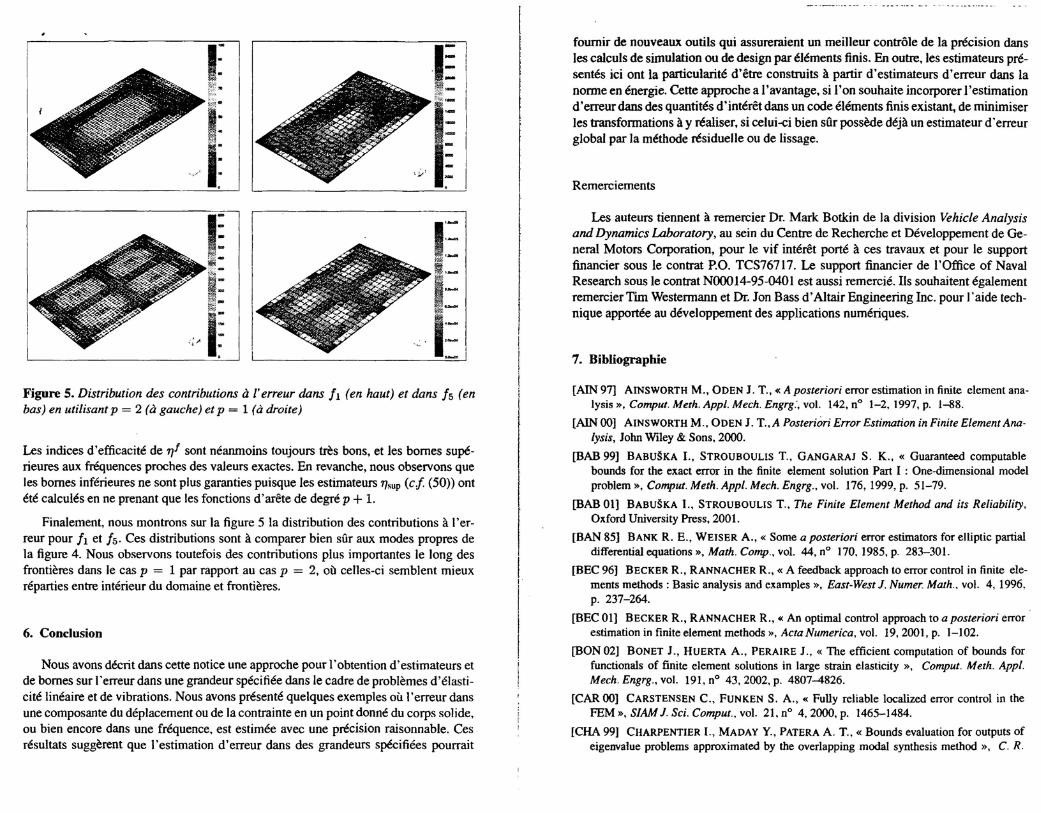
Figure 3. Geometrie du bras de controle et visualisation des deformations sous Iepresent cas de charge (en haut, a gauche), composante (1xx du champ de contrainte(en haut, a droite),fonction duale dans la direction x associee a axx au point Xo (enbas, a gauche), et distribution des contributions a ['erreur dans axx au point Xo (enbas, a droite)
5.2. Bras de contrij[e
Dans cet exemple, nous simulons un bras de contrOle soumis au cas de chargeindique par les fleches pointant sur l'anneau superieur, et a des deplacements nulsappliques sur les anneaux inferieurs, comme montre sur Ie graphe place sur Ie cotesuperieur gauche de la figure 3, Nous considerons ici un seul maillage (voir figure 3)de 232 elements isoparametriques Q2. D'autre part, nous supposons que Ie bras decontrole est realise dans un materiau dont les proprietes sont donnees par E = 1.2 X
106 et v = 0.3.
L'objectif de la simulation est d'estimer la valeur de la composante de contrainte(1xx au point Xo. Ce point se trouve en fait it l'interieur d'un element situe en borduredu trou central. La valeur "exacte" de cette quantite est calculee sur Ie meme maillageen utilisant des polynomes de degre quatre et vaut 70.405. Pour la solution elementsfinis 1J.h, nous trouvons une erreur dans la contrainte (moyennee localement autour dexo) de 5.099, soit une erreur relative de 7.24 pourcent Les calculs d'erreur a poste-riori produisent une borne inferieure de -21.123, une bome sup6rieure de 30,848, etleur valeur moyennee de 4.862. Nom; observons que cette demiere valeur est une tres
III
bonne estimation de l'erreur "exacte". Sur la figure 3, nous montrons egalement Iechamp de contrainte axx et la solution duale associee a (1xx au point Xo. D'autre'part,nous observons que la distribution des contributions a I' erreur relative a cette quantitereste dominante a proximite du point Xo,
5.3. Vibrations d'une plaque plane
Nous considerons ici une plaque plane mince de dimension 3 x 2 et d'epaisseurt = 0,02, realisee dans un materiau dont les proprietes sont E = 200 X 109, V = 0.27,et p = 7849. Dans cette etude, la plaque est supposee encastree Ie long de ses cotes.Nous avons construit deux maillages, I'un de Ne = 16 x 16 et I'autre de Ne = 24 x 16elements (dans les directions x et y), avec un unique element a travers repaisseur dela plaque (direction z). De plus, les elements sont choisis lineaires (Pz = 1) dans ladirection z, et lineaires (p = 1) ou quadratiques (p = 2) dans les directions x et y.

Figure 4. Modes propres associes auxfrequences f1 (en haut, a gauche), 12 (en haut,a droite), 13 (en bas, a gauche) et is (en bas, a droite)
I:iii.";t:.
Ne = 24 x 16. p = 1Frequences /h TJI >.elf Borne info a /h Borne sup. a /h
/1 117.05 -75.53 0.89 18.81 64.24
h 170.52 -103.98 0.86 37.09 95.99
fa 281.51 -167.69 0.83 66.16 161.48
i4 300.55 -195.39 0.89 40.22 170.08
i5 327.60 -208.85 0.90 51.65 185.83
Ne = 16 x 16, p = 1Frequences fh 171 >.en Borne info ~ fh Borne sup. ~ fh
/1 127.60 -106.18 1.12 -24.20 67.05
h 222.08 -142.38 0.82 32.44 126.96
fa 304.81 -277.53 1.23 -115.86 170.41
f4 357.12 -288.94 1.04 -70.24 206.59
f5 401.03 -242,96 0.80 94.80 221.34
Tableau 3. Frequences discrctes Ih, estimateurs d' erreur 1]1avec indice d' efficacireAqJ, et encadrement des frequences exactes sur Ie mail/age 16 x 16 avec p = 1
I:m
1m
I:I:;:1,10
:<:;"!lIl
I:I',.'<
"
,
I:~~~J~
I~:.. -~
I:
Nous nous interessons ici aux cinq premieres trequences propres de ce systemeque nOlls notons Ii. i = 1, ... ,5. Les modes propres associes a f1, 12, 13, et 15sont montres sur la figure 4 (en fait est montree l'intensite du deplacement des modespropres). Les valeurs exactes !i sont calcuIees de maniere precise sur Ie maillage fin24 x 16 en prenant p = 3 el pz = 2. Nous trouvons alors f1 = 32.571,12 = 50.271,13 = 79.702, i4 = 80.140, et i5 = 96.147, lesquelles va leurs seront utilisees pourevaluer la qualite des estimateurs d'erreur.
NOllS reportons dans les tableaux 3, 4, et 5 les resultats obtenus dans trois casdifferents : 1) Ne = 16 x 16 avec p = 1. 2) Ne = 24 x 16 avec p = 1, et 3)Ne = 24 x 16 avec p = 2. Pour faciliter la lecture des resultats, nous ne montrons queles frequences propres discretes in, ]'estimateur d' erreur 1]1 = (rtfm+ 1]!up)/2, I'indiced'efficacite de 1]1defini comme Ie rapport entre l'estimateur 1]1et la valeur exacte del'erreur. ainsi que les homes inferieures et superieures sur les frequences. c'est-a-direin +1]fnf et Ih +1]!up. Nous observons dans les deux premiers cas (voirtableaux 3 et 4)que les frequences discretes ih obtenues sont peu precises avec des erreurs relativesqui atteignentjusqu'a 360 pourcent Neanmoins, nous remarquons que 1]1foumit desestimations voisines de l'erreur exacte, puis que l'indice d'efficacite varie entre 0.80 a1.23 et les bomes encadrent plus fidelement I'erreur sur Ie maillage 24 x 16,
Tableau 4. Frequences discrctes Ih, estimateurs d' erreur 1]1avec indice d' efficaciteAeff' et encadrement des frequences exactes sur Ie maillage 24 x 16 avec p = 1
Ne = 24 x 16, P = 2Frequences Ih rf >.elf Borne info ~ Ih Borne sup. a !h
/1 35.15 -2.45 0.95 32.70 32.71
h 54.29 -3.78 0.94 50.50 50.51
h 86.57 -6.14 0.89 80.41 80.45
14 86.80 -6.09 0.91 80.69 80.73
Is 104.27 -7.37 0.91 96,88 96.93
Tableau 5. Frequences discrctes Ih, estimateurs d' erreur 1]1avec indice d' efficacitiAeff' et encadrement des frequences exactes sur Ie mai/lage 24 X 16 avec p = 2
Dans Ie troisieme cas (voir tableau 5), les trequences discretes obtenues sonl c1ai-rement plus precises. Les erreurs relatives sont maintenantde l'ordre de 8.50 pourcent
I:m71a:;...,,;,
I:I:
Les auteurs tiennent a remercier Dr. Mark Botkin de la division Vehicle Analysisand Dynamics Laboratory, au sein du Centre de Recherche et Developpement de Ge-neral Motors Corporation, pour Ie vif interet porte aces travaux et pour Ie supportfinancier sous Ie contrat P.O, TCS76717. Le support financier de I'Office of NavalResearch sous Ie contrat NOOO14-95-0401 est aussi remercie. lIs souhaitent egalementremercier Tim Westermann et Dr. Jon Bass d' Altair Engineering Inc. pour I' aide tech-nique apportee au developpement des applications numeriques.
Remerciements
7. Bibliographie
foumir de nouveaux outils qui assureraient un meilleur contrOle de la precision dansles calculs de simulation ou de design par elements finis. En outre, les estimateurs pre-sentes ici ont la particularite d'etre construits a partir d'estimateurs d'erreur dans lanorme en energie. Cette approche a I' avantage, si I' on souhaite incorporer I' estimationd' erreur dans des quantites d' interet dans un code elements finis existant, de minimiserles transformations Iiy realiser, si celui-ci bien sur possede deja un estimateur d' erreurglobal par la methode residuelle ou de lissage.
I.' ......-,.....~
I......
11.'......
1=.--
I~~-i-~:
IWi'-
~
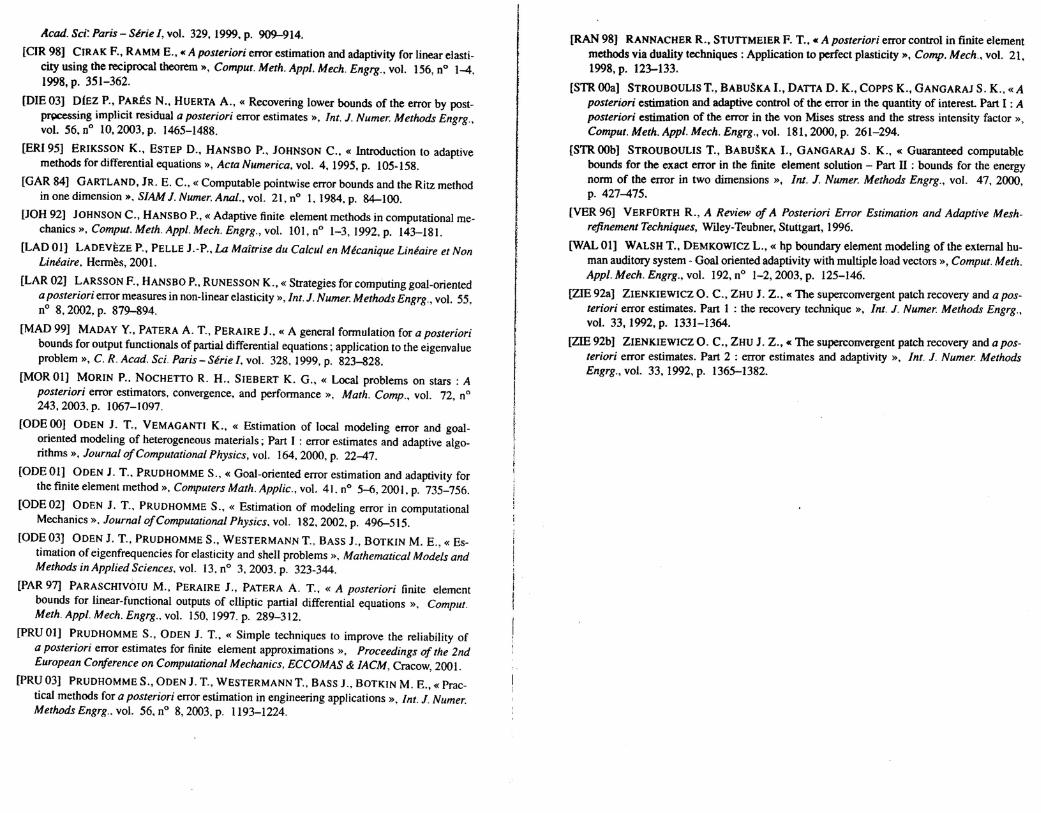
Figure S. Distribution des contributions Ii ['erreur dans !I (en haut) et dans 15 (enbas) en utilisant p = 2 (a gauche) et p = 1 (a droite)
Les indices d'efficacite de r/ sont neanmoins toujours tres bons, et les bomes supe-rieures aux frequences proches des valeurs exactes. En revanche, nous observons queles bomes inferieures ne sont plus garanties puisque les estimateurs 'T/sup (el (50» ontete calcules en ne prenant que les fonctions d'arete de degre p + 1.
Finalement, nous montrons sur la figure 5 la distribution des contributions a J'er-reUTpour It et 15, Ces distributions sont a comparer bien sur aux modes propres dela figure 4. Nous observons toutefois des contributions plus importantes Ie long desfrontieres dans Ie cas p = 1 par rapport au cas p = 2, ou celles-ci semblent mieuxreparties entre interieur du domaine et frontieres,
6. Conclusion
Nous avons decrit dans cette notice une approche pour I'obtention d' estimateurs etde bomes sur I'erreur dans une grandeur specifil~e dans Ie cadre de problemes d'elasti-cite lineaire et de vibrations. Nous avons presente quelques exemples ou I' erreur dansune composante du deplacement ou de la contrainte en un point donne du corps solide,ou bien encore dans une fr6quence, est estimee avec une precision raisonnable. Cesresultats suggerent que l'estimation d'erreur dans des grandeurs specifiees pourrait
[AIN 97] AINSWORTHM., ODENJ. T.,« A posteriori error estimation in finite element ana-lysis », Comput, Meth. Appl. Mech. Engrg:, vol. 142, nO 1-2, 1997,p. 1-88.
[AIN 00] AINSWORTHM., ODENJ. T"A PosterioriError Estimation in Finite Element Ana-lysis, John Wiley & Sons. 2000.
[BAB 99] BABUSKAI., STROUBOULIST., GANGARAJS. K., « Guaranteed computablebounds for the exact error in the finite element solution Part I : One-dimensional modelproblem ». Comput. Meth. Appl. Mech. Engrg., vo\. 176, 1999, p. 51-79.
[BAB 01] BABUSKA1., STROUBOULIST., The Finite Element Method and its Reliability,Oxford University Press, 2001.
[BAN 85] BANKR. E., WEISERA" « Some a posteriori error estimators for elliptic partialdifferential equations », Math, Comp" vo\. 44, nO 170, 1985, p. 283-301.
[BEC 96] BECKERR., RANNACHERR., « A feedback approach to error control in finite ele-ments methods: Basic analysis and examples », East-West J. Numer, Math., vol. 4, 1996.p. 237-264,
[BEC 01] BECKERR" RANNACHERR" « An optimal control approach to a posteriori errorestimation in finite element methods )', Acta Numerica, vol. 19, 2001, p. 1-102.
[BON 02] BONETJ., HUERTAA., PERAIREJ., « The efficient computation of bounds forfunctionals of finite element solutions in large strain elasticity», Comput, Meth. Appl.Mech, Engrg., vol. 191, nO 43,2002, p. 4807-4826.
[CAR 00] CARSTENSENC., FUNKENS. A., « Fully reliable localized error control in theFEM », SIAM J. Sci. Comput., vo\. 21. nO 4,2000, p, 1465-1484.
[CHA 99] CHARPENTIERI., MADAYY., PATERAA. T., « Bounds evaluation for outputs ofeigenvalue problems approximated by the overlapping modal synthesis method », C. R.
Acad. Sci: Paris - Serie I, vol. 329, 1999, p. 909-914.
[CIR 98] CTRAKF., RAMM E., « A posteriori error estimation and adaptivity for linear elasti-city using the reciprocal theorem~, Comput. Meth. Appl. Mech. Engrg., vol. 156, nO 1-4,1998, p, 351-362.
[DIE 03] D(EZ P., PARES N., HUERTA A., « Recovering lower bounds of the error by post-pl'{olCessingimplicit residual a posteriori error estimates », Int. J. Numer. Methods Engrg"vol. 56, n° 10,2003, p. 1465-1488.
[ERI95] ERIKSSON K., ESTEP D., HANSBO P., JOHNSON C., « Introduction to adaptivemethods for differential equations )', Acta Numerica, vol. 4, 1995, p. 105-158.
[GAR 84] GARTLAND, JR. E. C" « Computable pointwise error bounds and the Ritz methodin one dimension ». SIAM J. Numer. Anal., vol. 21, nO 1. 1984, p. 84-100.
[JOH 92] JOHNSON C., HANSBO P.,« Adaptive finite element methods in computational me-chanics », Comput. Meth, Appl. Mech. Engrg., vol. 101, nO 1-3,1992, p. 143-181.
[LAD 01] LADEVEZE P., PELLE J.-P.,lA Maitrise du Calcul en Mecanique Lineaire et NonLiniaire, Hermes, 2001.
[LAR 02] LARSSON F., HANSBO P., RUNESSON K.,« Strategies for computing goal-orienteda posteriori error measures in non-linear elasticity», Int. J. Numer. Methods Engrg" vol. 55,nO 8,2002, p. 879-894.
[MAD 99] MADAY Y., PATERA A. T., PERAIRE J., « A general formulation for a posterioribounds for output functionals of partial differential equations; application to the eigenvalueproblem », C. R. Acad. Sci. Paris - Serie I, vol. 328. 1999, p. 823-828,
[MOR 01] MORIN P.. NOCHETTO R. H .. SIEBERT K. G., « Local problems on stars: Aposteriori error estimators, convergence, and performance », Math. Comp., vol. 72, n°243,2oo3.p. 1067-1097.
[ODE 00] ODEN J. T, VEMAGANTI K., « Estimation of local modeling error and goal-oriented modeling of heterogeneous materia]s; Part 1 : error estimates and adaptive algo-rithms », Journal of Computational Physics, vol. 164,2000, p. 22-47.
[ODE 01] ODEN J. T., PRUDHOMME S., « Goal-oriented error estimation and adaptivity forthe finite element method », Computers Math. Applic., vol. 41. nO 5-6,2001, p. 735-756.
[ODE 02] ODEN J. T., PRUDHOMME S., « Estimation of modeling error in computationalMechanics ». Journal of Computational Physics. vol. 182,2002, p. 496-515.
[ODE 03] ODEN J. T., PRUDHOMMES., WESTERMANN T., BASS J., BOTKIN M. E.,« Es-timation of eigenfrequencies for elasticity and shell problems », Mathematical Models andMethods in Applied Sciences. vol. 13, n° 3.2003. p. 323-344.
[PAR 97] PARASCHIVOIU M., PERAIRE J., PATERA A. T., « A posteriori finite elementbounds for linear-functional outputs of elliptic partial differential equations », Comput,Meth. Appl. Mech. Engrg .. vol. ]50, 1997. p. 289-3] 2.
[PRU 01] PRUDHOMME S., ODEN J. T., « Simple techniques to improve the reliability ofa posteriori error estimates for finite element approximations ». Proceedings of the 2ndEuropean Conference on Computational Mechanics, ECCOMAS & IACM, Cracow, 2001.
[PRU 03] PRUDHOMME S" ODEN J. T., WESTERMANN T., BASS J., BOTKIN M. E.,« Prac-tical methods for a posteriori error estimation in engineering applications », Int. J, Numer.Methods Engrg,. vol. 56, nO 8,2003. p, 1193-1224.
[RAN 98] RANNACHER R., STUTTMEIER F. T., « A posteriori error control in finite elementmethods via duality techniques: Application to perfect plasticity », Comp, Mech., vol. 21,1998, p. 123-133.
[STR 00a] STROUBOULIS T., BABU~KA I.,DATTA D. K., COPPS K., GANGARAI S. K.,«Aposteriori estimation and adaptive control of the error in the quantity of interest. Part 1 : Aposteriori estimation of the error in the von Mises stress and the stress intensity factor »,Comput. Meth. Appl. Mech. Engrg., vol. 181,2000, p. 261-294.
[STR OOb] STROUBOULIS T., BABUSKA I., GANGARAJ S. K., « Guaranteed computablebounds for the exact error in the finite element solution - Part II : bounds for the energynorm of the error in two dimensions », Int. J. Numer. Methods Engrg., vol. 47, 2000.p.427-475,
[VER 96] VERFORTH R., A Review of A Posteriori Error Estimation and Adaptive Mesh-refinement Techniques, Wiley-Teubner, Stuttgart, 1996.
[WAL 01] WALSH T., DEMKOWICZ L.,« hp boundary element modeling of the external hu-man auditory system - Goal oriented adaptivity with multiple load vectors », Comput. Meth.Appl. Mech. Engrg., vol. 192, nO 1-2,2003, p. 125-146,
[ZIE 92a] ZIENKIEWICZ O. C., ZHU J. Z.,« The superconvergent patch recovery and a pos-teriori error estimates. Part 1 : the recovery technique », Tnt, J, Numer. Methods Engrg.,vol. 33,1992, p. 1331-1364.
[ZIE 92b] ZIENKIEWICZ O. C., ZHU J. Z.,« The superconvergent patch recovery and a pos-teriori error estimates. Part 2 : error estimates and adaptivity ». Int, J. Numer. MethodsEngrg., vol. 33,1992, p. 1365-1382.