热传导问题 基本算法 heat conduction algorithms
TRANSCRIPT

热传导问题 · 基本算法Heat Conduction · Algorithms
Dongke Sun (孙东科)[email protected]
东南大学机械工程学院School of Mechanical Engineering
Southeast University
January 31, 2019

Introduction
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 2 / 64

Introduction
Introduction
Heat conduction in the steady state
The governing equation can easily be derived𝜕𝑇
𝜕𝑡= ∇ · (𝑘∇𝑇 ) + 𝑆𝑇
Dongke Sun (Southeast University) January 31, 2019 3 / 64

Steady One-dimensional Conduction
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 4 / 64

Steady One-dimensional Conduction Basic Equations, Grid Spacing and Interface Conductivity
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 5 / 64

Steady One-dimensional Conduction Basic Equations, Grid Spacing and Interface Conductivity
The Basic Equations
Application of the method is 1-D steady state heat transfer problems
d
d𝑥
(︂𝑘
d𝑇
d𝑥
)︂+ 𝑆 = 0 (1)
This leads to the discretization equation
𝑎𝑃𝑇𝑃 = 𝑎𝐸𝑇𝐸 + 𝑎𝑊𝑇𝑊 + 𝑏 (2)
where
𝑎𝐸 =𝑘𝑒
(𝛿𝑥)𝑒, 𝑎𝑊 =
𝑘𝑒(𝛿𝑥)𝑤
, 𝑎𝑃 = 𝑎𝐸 + 𝑎𝑊 − 𝑆𝑃∆𝑥, 𝑏 = 𝑆𝐶∆𝑥 (3)
The quantities 𝑆𝐶 and 𝑆𝑃 arise from the source-term linearization of theform
𝑆 = 𝑆𝐶 + 𝑆𝑃𝑇𝑃 (4)
The value 𝑇𝑃 is assumed to be prevail throughout the control volume.
Dongke Sun (Southeast University) January 31, 2019 6 / 64

Steady One-dimensional Conduction Basic Equations, Grid Spacing and Interface Conductivity
The Grid Spacing
Grid-point cluster for the 1-D problemIt is now necessary that he distances (𝛿𝑥)𝑒 and (𝛿𝑥)𝑤 be equal.A fine grid is required where the 𝑇 ∼ 𝑥 variation is steep.
Since the 𝑇 ∼ 𝑥 distribution is unknown before the problem is solved, howcan we design an appropriate nun-uniform grid?
1 We normally has some qualitative expectations about the solution,from which some guidance can be obtained.
2 Preliminary coarse-grid solutions can be used to find pattern of the𝑇 ∼ 𝑥 variation; a suitable non-uniform grid can be used toconstructed.
Dongke Sun (Southeast University) January 31, 2019 7 / 64
Steady One-dimensional Conduction Basic Equations, Grid Spacing and Interface Conductivity
The Interface Conductivity
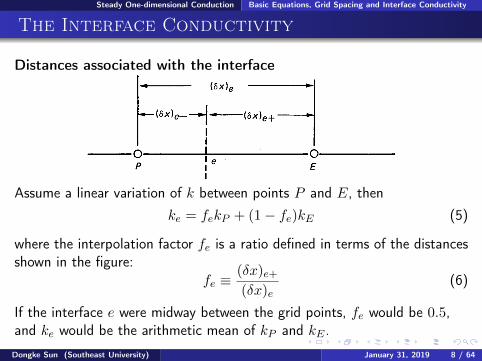
Distances associated with the interface
Assume a linear variation of 𝑘 between points 𝑃 and 𝐸, then
𝑘𝑒 = 𝑓𝑒𝑘𝑃 + (1 − 𝑓𝑒)𝑘𝐸 (5)
where the interpolation factor 𝑓𝑒 is a ratio defined in terms of the distancesshown in the figure:
𝑓𝑒 ≡(𝛿𝑥)𝑒+(𝛿𝑥)𝑒
(6)
If the interface 𝑒 were midway between the grid points, 𝑓𝑒 would be 0.5,and 𝑘𝑒 would be the arithmetic mean of 𝑘𝑃 and 𝑘𝐸 .
Dongke Sun (Southeast University) January 31, 2019 8 / 64

Steady One-dimensional Conduction Basic Equations, Grid Spacing and Interface Conductivity
The Interface Conductivity
A problem: This simple-minded approach leads to rather incorrectimplications in some cases and cannot accurately handle the abruptchanges of conductivity that may occur in composite materials.
Our main objective is to obtain a good representation for the heat flux𝑞𝑒 at the interface via
𝑞𝑒 =𝑘𝑒(𝑇𝑃 − 𝑇𝐸)
(𝛿𝑥)𝑒(7)
A steady 1-D anaylysis (without sources) leads to
𝑞𝑒 =𝑇𝑃 − 𝑇𝐸
(𝛿𝑥)𝑒−/𝑘𝑃 + (𝛿𝑥)𝑒+/𝑘𝐸(8)
Combination of above Eqs yields
𝑞𝑒 =
(︂1 − 𝑓𝑒𝑘𝑃
+𝑓𝑒𝑘𝐸
)︂−1
. (9)
When the interface 𝑒 is placed midway between 𝑃 and 𝐸, 𝑓𝑒 = 0.5.
Dongke Sun (Southeast University) January 31, 2019 9 / 64

Steady One-dimensional Conduction Basic Equations, Grid Spacing and Interface Conductivity
The Interface Conductivity
Then𝑘−1𝑒 = 0.5(𝑘−1
𝑃 + 𝑘−1𝐸 ) or 𝑘𝑒 =
2𝑘𝑃𝑘𝐸𝑘𝑃 + 𝑘𝐸
. (10)
It shows that the 𝑘𝑒 is the harmonic mean of 𝑘𝑃 and 𝑘𝐸 , rather than thearithmetic mean.The use of Eq.(9) leads to the following expression for 𝑎𝐸
𝑎𝐸 =
[︂(𝛿𝑥)𝑒−𝑘𝑃
+(𝛿𝑥)𝑒+𝑘𝐸
]︂(11)
Clearly, 𝑎𝐸 represent the conductace of the materials between points 𝑃 and𝐸. A similar expression can be written for 𝑎𝑊
𝑎𝑊 =
[︂(𝛿𝑥)𝑤−𝑘𝑊
+(𝛿𝑥)𝑤+
𝑘𝑃
]︂The effectiveness of this formulation can be quickly seen in the twofollowing limiting cases.
Dongke Sun (Southeast University) January 31, 2019 10 / 64

Steady One-dimensional Conduction Basic Equations, Grid Spacing and Interface Conductivity
The Interface Conductivity
1 Let 𝑘𝐸 → 0. Then, from Eq. (9)
𝑘𝑒 → 0 (12)
It implies that the heat flux at the face of an insulator becomes zero.The arithmetic mean formulation have given a nonzero flux in thissituation.
2 Let 𝑘𝑃 ≫ 𝑘𝐸 . Then
𝑘𝑒 →𝑘𝐸𝑓𝑒
(13)
It implies that 𝑘𝑒 is not equal to 𝑘𝐸 , but rather 1/𝑓𝑒 times it. Ourpurpose is to get a correct value of 𝑞𝑒 via Eq. (7). The use of Eq.(13) yields
𝑞𝑒 =𝑘𝐸(𝑇𝑃 − 𝑇𝐸)
(𝛿𝑥)𝑒+. (14)
When 𝑘𝑃 ≪ 𝑘𝐸 , the 𝑇𝑃 will prevail right up to the interface 𝑒.
Dongke Sun (Southeast University) January 31, 2019 11 / 64

Steady One-dimensional Conduction Nonlinearity and Source Term Linearization
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 12 / 64

Steady One-dimensional Conduction Nonlinearity and Source Term Linearization
Nonlinearity
The discretization equation 𝑎𝑃𝑇𝑃 = 𝑎𝐸𝑇𝐸 + 𝑎𝑊𝑇𝑊 + 𝑏 is a linearalgebraic equation, and we shall solve the set of such equations for linearequations. However, we shall frequently encounter nonlinear situationseven in heat conduction. The conductivity 𝑘 may depend on 𝑇 , or thesource 𝑆 may be a nonlinear function of 𝑇 .We shall handle such situations by iteration.
1 Start with a guess or estimate for the values of 𝑇 at all grid points.2 From these guessed 𝑇 s, calculate tentative values of the coefficients in
the discretization equation.3 Solve the nominally linear set of algebraic equations to get new values
of 𝑇 .4 With these 𝑇 s as better guesses, return step 2 and repeat the process
until further repetitions (called iterations) cease to produce anysignificant changes in the values of 𝑇 .
The final unchanging state if called the convergence of the iterations.
Dongke Sun (Southeast University) January 31, 2019 13 / 64

Steady One-dimensional Conduction Nonlinearity and Source Term Linearization
Source Term Linearization
The four possible linearizations for the example.
Dongke Sun (Southeast University) January 31, 2019 14 / 64

Steady One-dimensional Conduction Boundary Conditions and Solutions of the LA Equations
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 15 / 64

Steady One-dimensional Conduction Boundary Conditions and Solutions of the LA Equations
Boundary Conditions
Control volumes for the internal and boundary points.
Typically, three kinds of boundary conditions are encountered:Given boundary temperatureGiven boundary heat fluxBoundary heat flux specified via a heat transfer coefficient and thetemperature of surrounding fluid
Intergrating Eq (1) over the CV and noting that 𝑞 stands for −𝑘d𝑇/d𝑥, weget
𝑞𝐵 − 𝑞𝑖 + (𝑆𝐶 + 𝑆𝑃𝑇𝐵)∆𝑥 = 0 (15)
The interface heat flux 𝑞𝑖 can be written as 𝑞𝑖 = 𝑘𝑒(𝑇𝐵 − 𝑇𝐼)/(𝛿𝑥)𝑖. So,
𝑞𝐵 − 𝑘𝑖(𝑇𝐵 − 𝑇𝐼)
(𝛿𝑥)𝑖+ (𝑆𝐶 + 𝑆𝑃𝑇𝐵)∆𝑥 = 0 (16)
Dongke Sun (Southeast University) January 31, 2019 16 / 64

Steady One-dimensional Conduction Boundary Conditions and Solutions of the LA Equations
Boundary Conditions
If the value of 𝑞𝐵 itself is given, the required equation for 𝑇𝐵 becomes
𝑎𝐵𝑇𝐵 = 𝑎𝐼𝑇𝐼 + 𝑏 (17)
where𝑎𝐼 =
𝑘𝑖(𝛿𝑥)𝑖
, 𝑏 = 𝑆𝐶∆𝑥 + 𝑞𝐵, 𝑎𝐵 = 𝑎𝐼 − 𝑆𝑃∆𝑥 (18)
If the value of 𝑞𝐵 is specified in terms of a heat transfer coefficient ℎ and asurrounding-fluid temperature 𝑇𝑓 such that
𝑞𝐵 = ℎ(𝑇𝑓 − 𝑇𝐵) (19)
then the equation for 𝑇𝐵 becomes
𝑎𝐵𝑇𝐵 = 𝑎(𝑇𝐼 + 𝑏) (20)
where
𝑎𝐼 =𝑘𝑖
(𝛿𝑥)𝑖, 𝑏 = 𝑆𝐶∆𝑥 + ℎ𝑇𝑓 , 𝑎𝐵 = 𝑎𝐼 − 𝑆𝑃∆𝑥 + ℎ (21)
Dongke Sun (Southeast University) January 31, 2019 17 / 64

Steady One-dimensional Conduction Boundary Conditions and Solutions of the LA Equations
Solutions of the Linear Algebraic Equations
The TDMA (TriDiagonal-Matrix Algorithm)The discretization equations can be written as
𝑎𝑖𝑇𝑖 = 𝑏𝑖𝑇𝑖+1 + 𝑐𝑖𝑇𝑖−1 + 𝑑𝑖 (22)
To account for the special form of the boundary-point equations, let us set
𝑐1 = 0 and 𝑏𝑁 = 0 (23)
Suppose, in the forward-substitution process, we seek a relation
𝑇𝑖 = 𝑃𝑖𝑇𝑖+1 + 𝑄𝑖 (24)
after we have just obtained
𝑇𝑖−1 = 𝑃𝑖−1𝑇𝑖 + 𝑄𝑖−1 (25)
Substitution of Eq. (25) into Eq. (22) leads to
𝑎𝑖𝑇𝑖 = 𝑏𝑖𝑇𝑖+1 + 𝑐𝑖(𝑃𝑖−1𝑇𝑖 + 𝑄𝑖−1) + 𝑑𝑖 (26)
Dongke Sun (Southeast University) January 31, 2019 18 / 64

Steady One-dimensional Conduction Boundary Conditions and Solutions of the LA Equations
Solutions of the Linear Algebraic Equations
The coefficients 𝑃𝑖 and 𝑄𝑖 stand for
𝑃𝑖 =𝑏𝑖
𝑎𝑖 − 𝑐𝑖𝑃𝑖−1𝑄𝑖 =
𝑑𝑖 + 𝑐𝑖𝑄𝑖−1
𝑎𝑖 − 𝑐𝑖𝑃𝑖−1(27)
To start the recurrence process, we note that Eq. (22) for 𝑖 = 1 is almostof the form (24). Thus, the values of 𝑃1 and 𝑄1 are given by
𝑃1 =𝑏1𝑎1
and 𝑄1 =𝑑1𝑎1
(28)
It is interesting to note that these expressions do follow Eq. (27) after thesubstitution 𝑐𝑖 = 0.At the other end of the 𝑃𝑖, 𝑄𝑖 sequence, we note that 𝑏𝑁 = 0. This leadsto 𝑃𝑁 = 0, and hence from Eq. (24) we obtain
𝑇𝑁 = 𝑄𝑁 (29)
Now we are in a position to start the back substitution via Eq. (24).
Dongke Sun (Southeast University) January 31, 2019 19 / 64

Steady One-dimensional Conduction Boundary Conditions and Solutions of the LA Equations
Solutions of the Linear Algebraic EquationsSummary of the algorithm
1 Calculate 𝑃1 and 𝑄1 from Eq. (28).2 Use the recurrence relations (27), i.e.
𝑃𝑖 =𝑏𝑖
𝑎𝑖 − 𝑐𝑖𝑃𝑖−1𝑄𝑖 =
𝑑𝑖 + 𝑐𝑖𝑄𝑖−1
𝑎𝑖 − 𝑐𝑖𝑃𝑖−1
to obtain 𝑃𝑖 and 𝑄𝑖 for 𝑖 = 1, 2, 3, ..., 𝑁 .3 Set 𝑇𝑁 = 𝑄𝑁 .4 Use Eq. (24), i.e. 𝑇𝑖−1 = 𝑃𝑖−1𝑇𝑖 + 𝑄𝑖−1, for
𝑖 = 𝑁 − 1, 𝑁 − 2, 𝑁 − 3, ..., 3, 2, 1 to obtain𝑇𝑁−1, 𝑇𝑁−2, ..., 𝑇3, 𝑇2, 𝑇1.
The algorithm is a very powerful and convenient equation solverwhenever the algebraic equations can be represented in the form of Eq.(22).
Unlike general matrix methods, the TDMA requires computer storageand computer time proportional only to 𝑁 , rather than to 𝑁2 or 𝑁3.
Dongke Sun (Southeast University) January 31, 2019 20 / 64

Unsteady One-dimensional Conduction
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 21 / 64

Unsteady One-dimensional Conduction The General Discretization Equation
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 22 / 64

Unsteady One-dimensional Conduction The General Discretization Equation
The General Discretization Equation
The unsteady one-dimensional heat-conduction equation
𝜌𝑐𝜕𝑇
𝜕𝑡=
𝜕
𝜕𝑥
(︂𝑘𝜕𝑇
𝜕𝑥
)︂(30)
The discretization equation is now derived by integrating Eq. (30) over thecontrol volume and over the time interval from 𝑡 to 𝑡 + ∆𝑡. Thus,
𝜌𝑐
ˆ 𝑒
𝑤
ˆ 𝑡+Δ𝑡
𝑡
𝜕𝑇
𝜕𝑡d𝑡d𝑥 =
ˆ 𝑡+Δ𝑡
𝑡
ˆ 𝑒
𝑤
𝜕
𝜕𝑥
(︂𝜕𝑇
𝜕𝑥
)︂d𝑥d𝑡 (31)
For the representation of the term 𝜕𝑇/𝜕𝑡, we shall assume that thegrid-point value of 𝑇 prevails throughout the control volume. Then
𝜌𝑐
ˆ 𝑒
𝑤
ˆ 𝑡+Δ𝑡
𝑡
𝜕𝑇
𝜕𝑡d𝑡d𝑥 = 𝜌𝑐∆𝑥(𝑇 1
𝑃 − 𝑇 0𝑃 ) (32)
Dongke Sun (Southeast University) January 31, 2019 23 / 64

Unsteady One-dimensional Conduction The General Discretization Equation
The General Discretization Equation
Following our steady-state practice for 𝑘𝜕𝑇/𝜕𝑥, we obtain
𝜌𝑐∆𝑥(𝑇 1𝑃 − 𝑇 0
𝑃 ) =
ˆ 𝑡+Δ𝑡
𝑡
[︂𝑘𝑒(𝑇𝐸 − 𝑇𝑃 )
(𝛿𝑥)𝑒− 𝑘𝑤(𝑇𝑃 − 𝑇𝑊 )
(𝛿𝑥)𝑤
]︂d𝑡 (33)
It is at this point that we need assumptions about how 𝑇𝑃 , 𝑇𝐸 and 𝑇𝑊
vary with time from 𝑡 to 𝑡 + ∆𝑡. Some of assumptions can be generalizedby proposing ˆ 𝑡+Δ𝑡
𝑡𝑇𝑝d𝑡 = [𝑓𝑇 1
𝑝 + (1 − 𝑓)𝑇 0𝑃 ]∆𝑡 (34)
where 𝑓 is a weighting factor between 0 and 1.
𝜌𝑐∆𝑥
∆𝑡(𝑇 1
𝑃 − 𝑇 0𝑃 ) = 𝑓
[︂𝑘𝑒(𝑇
1𝐸 − 𝑇 1
𝑃 )
(𝛿𝑥)𝑒−
𝑘𝑤(𝑇 1𝑃 − 𝑇 1
𝑊 )
(𝛿𝑥)𝑤
]︂+
(1 − 𝑓)
[︂𝑘𝑒(𝑇
0𝐸 − 𝑇 0
𝑃 )
(𝛿𝑥)𝑒−
𝑘𝑤(𝑇 0𝑃 − 𝑇 0
𝑊 )
(𝛿𝑥)𝑤
]︂ (35)
Dongke Sun (Southeast University) January 31, 2019 24 / 64

Unsteady One-dimensional Conduction Explicit, Crank-Nicolson, and Fully Implicit Schemes
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 25 / 64

Unsteady One-dimensional Conduction Explicit, Crank-Nicolson, and Fully Implicit Schemes
The General Discretization Equation
After rearrangement the above equation, we have
𝑎𝑃𝑇𝑃 = 𝑎𝐸 [𝑓𝑇𝐸 + (1 − 𝑓)𝑇 0𝐸 ] + 𝑎𝑊 [𝑓𝑇𝑊 + (1 − 𝑓)𝑇 0
𝑊 ]
+ [𝑎0𝑃 − (1 − 𝑓)𝑎𝐸 − (1 − 𝑓)𝑎𝑊 ]𝑇 0𝑃
(36)
where𝑎𝐸 =
𝑘𝑒(𝛿𝑥)𝑒
, 𝑎𝑊 =𝑘𝑤
(𝛿𝑥)𝑤, 𝑎0𝑃 =
𝜌𝑐∆𝑥
∆𝑡
𝑎𝑃 = 𝑓𝑎𝐸 + 𝑓𝑎𝑊 + 𝑎0𝑃
(37)
For certain specific values of the weighting factor 𝑓 , the discretizationequation reduces to one of the well-known schemes for parabolic equations.In particular.
𝑓 = 0 leads to the explicit scheme,𝑓 = 1/2 to the Crank-Nicolson scheme,𝑓 = 1 to the fully implicit scheme.
Dongke Sun (Southeast University) January 31, 2019 26 / 64

Unsteady One-dimensional Conduction Explicit, Crank-Nicolson, and Fully Implicit Schemes
Three Different Schemes
Variation of temperature with time for three different schemes
Dongke Sun (Southeast University) January 31, 2019 27 / 64

Unsteady One-dimensional Conduction Explicit, Crank-Nicolson, and Fully Implicit Schemes
Three Different Schemes
Variation of temperature with time for three different schemes
The explicit scheme assumes that the old value 𝑇 0𝑃 prevails throughout
the entire time step except at time 𝑡 + ∆𝑡.The Crank-Nicolson scheme assumes a linear variation of 𝑇𝑃 .The fully implicit scheme postulates that 𝑇𝑃 suddenly drops from 𝑇 0
𝑃
to 𝑇 1𝑃 at time 𝑡, and then stays at 𝑇 1
𝑃 over the whole of the time step.
Dongke Sun (Southeast University) January 31, 2019 28 / 64

Unsteady One-dimensional Conduction Explicit, Crank-Nicolson, and Fully Implicit Schemes
Explicit Scheme and Full Implicit Scheme
For the Explicit Scheme, Eq. (36) becomes
𝑎𝑃𝑇𝑃 = 𝑎𝐸𝑇0𝐸 + 𝑎𝑊𝑇 0
𝑊 + (𝑎0𝑃 − 𝑎𝐸 − 𝑎𝑊 )𝑇 0𝑃 (38)
For uniform conductivity and ∆𝑥 = (𝛿𝑥)𝑒 = (𝛿𝑥)𝑤, the condition can beexpressed as
∆𝑡 <𝜌𝑐(∆𝑥)2
2𝑘(39)
Here we record the Full Implicit Scheme of Eq. (36). We shall introducethe linearized source term, which we had temporarily dropped. The result is
𝑎𝑃𝑇𝑃 = 𝑎𝐸𝑇𝐸 + 𝑎𝑊𝑇𝑊 + 𝑏 (40)
with
𝑎𝐸 =𝑘𝑒
(𝛿𝑥)𝑒, 𝑎𝑊 =
𝑘𝑤(𝛿𝑥)𝑤
, 𝑎0𝑃 =𝜌𝑐∆𝑥
∆𝑡, 𝑏 = 𝑆𝐶∆𝑥 + 𝑎0𝑃𝑇
0𝑃
𝑎𝑃 = 𝑎𝐸 + 𝑎𝑊 + 𝑎0𝑃 − 𝑆𝑃∆𝑥
(41)
Dongke Sun (Southeast University) January 31, 2019 29 / 64

Two- and Three-dimensional Situations
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 30 / 64

Two- and Three-dimensional Situations Discretization Equation for Two Dimensions
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 31 / 64

Two- and Three-dimensional Situations Discretization Equation for Two Dimensions
Discretization Equation for Two Dimensions
The differential equation for two-dimensional situation is
𝜌𝑐𝜕𝑇
𝜕𝑡=
𝜕
𝜕𝑥
(︂𝑘𝜕𝑇
𝜕𝑥
)︂+
𝜕
𝜕𝑦
(︂𝑘𝜕𝑇
𝜕𝑦
)︂+ 𝑆 (42)
Dongke Sun (Southeast University) January 31, 2019 32 / 64

Two- and Three-dimensional Situations Discretization Equation for Two Dimensions
Discretization Equation for Two Dimensions
The differential equation for two-dimensional situation is
𝜌𝑐𝜕𝑇
𝜕𝑡=
𝜕
𝜕𝑥
(︂𝑘𝜕𝑇
𝜕𝑥
)︂+
𝜕
𝜕𝑦
(︂𝑘𝜕𝑇
𝜕𝑦
)︂+ 𝑆 (42)
The discretization equation
𝑎𝑃𝑇𝑃 = 𝑎𝐸𝑇𝐸 + 𝑎𝑊𝑇𝑊 + 𝑎𝑁𝑇𝑁 + 𝑎𝑆𝑇𝑆 + 𝑏 (43)
where𝑎𝐸 =
𝑘𝑒∆𝑦
(𝛿𝑥)𝑒𝑎𝑁 =
𝑘𝑛∆𝑥
(𝛿𝑥)𝑛
𝑎𝑊 =𝑘𝑤∆𝑦
(𝛿𝑥)𝑤𝑎𝑆 =
𝑘𝑠∆𝑥
(𝛿𝑥)𝑠
𝑎0𝑃 =𝜌𝑐∆𝑥∆𝑦
∆𝑡𝑏 = 𝑆𝐶∆𝑥∆𝑦 + 𝑎0𝑃𝑇
0𝑃
𝑎𝑃 = 𝑎𝐸 + 𝑎𝑊 + 𝑎𝑁 + 𝑎𝑆 + 𝑎0𝑃 − 𝑆𝑃∆𝑥∆𝑦
(44)
The product ∆𝑥∆𝑦 is the volume of the control volume.
Dongke Sun (Southeast University) January 31, 2019 32 / 64

Two- and Three-dimensional Situations Discretization Equation for Three Dimensions
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 33 / 64

Two- and Three-dimensional Situations Discretization Equation for Three Dimensions
Discretization Equation for Three Dimensions
The differential equation for three-dimensional situation is
𝜌𝑐𝜕𝑇
𝜕𝑡=
𝜕
𝜕𝑥
(︂𝑘𝜕𝑇
𝜕𝑥
)︂+
𝜕
𝜕𝑦
(︂𝑘𝜕𝑇
𝜕𝑦
)︂+
𝜕
𝜕𝑧
(︂𝑘𝜕𝑇
𝜕𝑧
)︂+ 𝑆
The discretization equation
𝑎𝑃𝑇𝑃 = 𝑎𝐸𝑇𝐸 + 𝑎𝑊𝑇𝑊 + 𝑎𝑁𝑇𝑁 + 𝑎𝑆𝑇𝑆 + 𝑎𝑇𝑇𝑇 + 𝑎𝐵𝑇𝐵 + 𝑏 (45)
where
𝑎𝐸 =𝑘𝑒∆𝑦∆𝑧
(𝛿𝑥)𝑒𝑎𝑁 =
𝑘𝑛∆𝑧∆𝑥
(𝛿𝑥)𝑛𝑎𝑇 =
𝑘𝑡∆𝑥∆𝑦
(𝛿𝑥)𝑡
𝑎𝑊 =𝑘𝑤∆𝑦∆𝑧
(𝛿𝑥)𝑤𝑎𝑆 =
𝑘𝑠∆𝑧∆𝑥
(𝛿𝑥)𝑠𝑎𝐵 =
𝑘𝑏∆𝑥∆𝑦
(𝛿𝑥)𝑏
𝑎0𝑃 =𝜌𝑐∆𝑥∆𝑦∆𝑧
∆𝑡𝑏 = 𝑆𝐶∆𝑥∆𝑦∆𝑧 + 𝑎0𝑃𝑇
0𝑃
𝑎𝑃 = 𝑎𝐸 + 𝑎𝑊 + 𝑎𝑁 + 𝑎𝑆 + 𝑎𝑇 + 𝑎𝐵 + 𝑎0𝑃 − 𝑆𝑃∆𝑥∆𝑦∆𝑧
(46)
Dongke Sun (Southeast University) January 31, 2019 34 / 64

Two- and Three-dimensional Situations Solution of the Linear Algebraic Equations
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 35 / 64

Two- and Three-dimensional Situations Solution of the Linear Algebraic Equations
The Gauss-Seidel Point-by-Point Method
The simplest of all iterative methods is the Gauss-Seidel method in whichthe values of the variable are calculated by visiting each grid point in acertain order. The discretization equation is written as
𝑎𝑃𝑇𝑃 =∑︁
𝑎nb𝑇nb + 𝑏 (47)
where the subscript nb denotes a neighbor point, the 𝑇𝑃 at the visited gridpoint is calculated from
𝑇𝑃 =
∑︀𝑎nb𝑇
*nb + 𝑏
𝑎𝑃(48)
where 𝑇 *nb stands for the neighbor-point value present in the computer
storage. In any case, 𝑇 *nb is the latest available value for the neighbor-point
temperature.When all grid points have been visited in this manner, one iteration of theGauss-Seidel method is complete.Dongke Sun (Southeast University) January 31, 2019 36 / 64

Two- and Three-dimensional Situations Solution of the Linear Algebraic Equations
The Gauss-Seidel Point-by-Point Method
To illustrate the method, we shall consider two very simple exampleCase 1:Equations 𝑇1 = 0.4𝑇2 + 0.2, 𝑇2 = 𝑇1 + 1 (49)
Solution————————————————————————————–
————————————————————————————–
Case 2:Equations 𝑇1 = 𝑇2 − 1, 𝑇2 = 2.5𝑇1 − 0.5 (50)
Solution————————————————————————————–
————————————————————————————–
Dongke Sun (Southeast University) January 31, 2019 37 / 64

Two- and Three-dimensional Situations Solution of the Linear Algebraic Equations
The Gauss-Seidel Point-by-Point Method
To illustrate the method, we shall consider two very simple exampleCase 1:Equations 𝑇1 = 0.4𝑇2 + 0.2, 𝑇2 = 𝑇1 + 1 (49)
Solution————————————————————————————–
————————————————————————————–
Case 2:Equations 𝑇1 = 𝑇2 − 1, 𝑇2 = 2.5𝑇1 − 0.5 (50)
Solution————————————————————————————–
————————————————————————————–Dongke Sun (Southeast University) January 31, 2019 37 / 64

Two- and Three-dimensional Situations Solution of the Linear Algebraic Equations
The Gauss-Seidel Point-by-Point Method
The Causs-Seidel method does not always converge. The Scarboroughcriterion has been formulated∑︀
|𝑎nb||𝑎𝑃 |
=
{︂6 1 for all equations< 1 for at least one equation. (51)
Comments1 The criterion is a sufficient condition, not a necessary one.2 Although we shall not advocate the use of Gauss-Seidel method, it
seems desirable that our discretization equations should satisfy theScarborough criterion.
3 The presentce of a negative 𝑆𝑃 leads to∑︀
𝑎nb/𝑎𝑃 < 1 (𝑎𝑃 oftenequals
∑︀𝑎nb,
∑︀𝑎nb <
∑︀|𝑎nb|), which leads to a violation of the
criterion.4 when 𝑎𝑃 =
∑︀𝑎nb and all the coefficients are positive, we obtain∑︀
|𝑎nb|/|𝑎𝑃 | = 1 for all equations. The equation on boundaryconditions should satisfy
∑︀|𝑎nb|/|𝑎𝑃 | < 1.
Dongke Sun (Southeast University) January 31, 2019 38 / 64

Over-Relaxation and Under-Relaxation
OUTLINE
1 Introduction
2 Steady One-dimensional ConductionBasic Equations, Grid Spacing and Interface ConductivityNonlinearity and Source Term LinearizationBoundary Conditions and Solutions of the LA Equations
3 Unsteady One-dimensional ConductionThe General Discretization EquationExplicit, Crank-Nicolson, and Fully Implicit Schemes
4 Two- and Three-dimensional SituationsDiscretization Equation for Two DimensionsDiscretization Equation for Three DimensionsSolution of the Linear Algebraic Equations
5 Over-Relaxation and Under-Relaxation
Dongke Sun (Southeast University) January 31, 2019 39 / 64

Over-Relaxation and Under-Relaxation
Over-Relaxation and Under-Relaxation
Use of a relaxation factorWe shall introduce over-relaxation or under-relaxation with the generaldiscretization equation of the form
𝑎𝑃𝑇𝑃 =∑︁
𝑎nb𝑇nb + 𝑏 (52)
Further, 𝑇 *𝑃 will be taken as the value of 𝑇𝑃 from the previous iterations.
Eq. (52) can be written as
𝑇𝑃 =
∑︀𝑎nb𝑇nb + 𝑏
𝑎𝑃(53)
If we add 𝑇 *𝑃 to the right-hand side and subtract it, we have
𝑇𝑃 = 𝑇 *𝑃 +
(︂∑︀𝑎nb𝑇nb + 𝑏
𝑎𝑃− 𝑇 *
𝑃
)︂(54)
where the contents of the parentheses represent the change in 𝑇𝑃 producedby the current iteration.Dongke Sun (Southeast University) January 31, 2019 40 / 64

Over-Relaxation and Under-Relaxation
Over-Relaxation and Under-Relaxation
This change can be modified by the introduction of a relaxation factor 𝛼,so that
𝑇𝑃 = 𝑇 *𝑃 + 𝛼
(︂∑︀𝑎nb𝑇nb + 𝑏
𝑎𝑃− 𝑇 *
𝑃
)︂or
𝑎𝑃𝛼
𝑇𝑃 =∑︁
𝑎nb𝑇nb + 𝑏 + (1 − 𝛼)𝑎𝑃𝛼
𝑇 *𝑃
(55)
When the iterations converge, 𝑇𝑃 becomes equal to 𝑇 *𝑃 . The above
equation implies that the converged values do satisfy the originalequation.When the relaxation factor 𝛼 is between 0 and 1, its effect is under-relaxation. That is, the values of 𝑇𝑃 stay closer to 𝑇 *
𝑃 . When 𝛼 isgreater than 1, over-relaxation is produced.There is no need to maintain the same value of 𝛼 during the entirecomputation.It is permissible, though not very convenient, to choose a differentvalue of 𝛼 for each gird point.
Dongke Sun (Southeast University) January 31, 2019 41 / 64

Over-Relaxation and Under-Relaxation
Over-Relaxation and Under-Relaxation
Relaxation through inertiaAnother technique of over-Relaxation or under-Relaxation is to replace thediscretization equation (52) with
(𝑎𝑃 + 𝑖)𝑇𝑃 =∑︁
𝑎nb𝑇nb + 𝑏 + 𝑖𝑇 *𝑃 (56)
where 𝑖 is the so-called inertia.For positive values of 𝑖, Eq. (56) has the effect of under-relaxation,
while negative values of 𝑖 produce over-relaxation.There is no general rules for finding the optimum value of the inertia 𝑖.From Eq. (56), we can deduce that 𝑖 should be comparable to 𝑎𝑃 ,and the greater the magnitude of 𝑖 the stronger will be the effect ofthe relaxation.
The practice of solving a steady-state problem via the unsteadyformulation can now be recognized as simply a particular kind ofunder-relaxation procedure.
Dongke Sun (Southeast University) January 31, 2019 42 / 64

热传导问题 · 潜热处理Heat Conduction · Latent Heat
Dongke Sun (孙东科)[email protected]
东南大学机械工程学院School of Mechanical Engineering
Southeast University
January 31, 2019
Introduction
OUTLINE
6 Introduction
7 Governing Equation
8 In the Polar Coordinates
9 Worked Examples
10 Summary
Dongke Sun (Southeast University) January 31, 2019 44 / 64

Introduction
Introduction
Heat Transfer with Phase ChangeMelting/freezing/boiling/condensing takes place over an extended range oftemperatures.
The solid and liquid phases are separate by a two-phase moving region,"mushy zone".
Dongke Sun (Southeast University) January 31, 2019 45 / 64

Introduction
Introduction
Solidification of Metals and AlloysWe will describe the methods for solving alloy solidification problems inmultidimensional coordinate systems.
For the sake of simplicity, we will consider solidification problems withoutfluid flows.Dongke Sun (Southeast University) January 31, 2019 46 / 64

Introduction
Introduction
Solidification of Metals and AlloysWe will describe the methods for solving alloy solidification problems inmultidimensional coordinate systems.
For the sake of simplicity, we will consider solidification problems withoutfluid flows.Dongke Sun (Southeast University) January 31, 2019 46 / 64

Governing Equation
OUTLINE
6 Introduction
7 Governing Equation
8 In the Polar Coordinates
9 Worked Examples
10 Summary
Dongke Sun (Southeast University) January 31, 2019 47 / 64

Governing Equation
Governing equation with a source term
Governing equation involving latent heatThe governing heat conduction equation can be cast into the weak form
𝜕(𝜌𝐻)
𝜕𝑡= ∇ · (𝑘∇𝑇 ) . (57)
The total enthalpy 𝐻 and the temperature 𝑇 can be interpreted asaveraged values within a control volume. Then,
𝐻 = 𝑐𝑝𝑇 + 𝑓𝑙𝐿ℎ (58)
where 𝑓𝑙 is the liquid phase fraction. For a system with liquid and solidphases, we have 𝑓𝑙 + 𝑓𝑠 = 1. Supposing 𝑐𝑝, 𝜌 = const, we obtain
𝜌𝑐𝑝𝜕𝑇
𝜕𝑡= ∇ · (𝜆∇𝑇 ) + 𝜌𝐿ℎ
𝜕𝑓𝑠𝜕𝑡
. (59)
The are three methods for solving the source term.
Dongke Sun (Southeast University) January 31, 2019 48 / 64

Governing Equation
Methods for solving source term
1 Equivalent Specific Heat Method
𝜌𝑐𝑝𝜕𝑇
𝜕𝑡= ∇ · (𝜆∇𝑇 ) + 𝜌𝐿ℎ
𝜕𝑓𝑠𝜕𝑡
(3)
Let make a variation𝜌𝐿ℎ
𝜕𝑓𝑠𝜕𝑡
= 𝜌𝐿ℎ𝜕𝑓𝑠𝜕𝑇
𝜕𝑇
𝜕𝑡(4)
After substitution, we have
𝜌
(︂𝑐𝑝 − 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇
)︂𝜕𝑇
𝜕𝑡= ∇ · (𝜆∇𝑇 ) (5)
Rearrange it. Then
𝜌𝑐𝑝𝑒𝜕𝑇
𝜕𝑡= ∇ · (𝜆∇𝑇 ) with 𝑐𝑝𝑒 = 𝑐𝑝 − 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇
(6)
How can we get the relation between solid fraction and 𝑇 , 𝑓𝑠 ∼ 𝑇?
Dongke Sun (Southeast University) January 31, 2019 49 / 64

Governing Equation
Heat Transfer with Phase Change
2 Temperature Recovery Method
𝜌𝑐𝑝𝜕𝑇 ′
𝜕𝑡= ∇ · (𝜆∇𝑇 ) ⇒
𝑇2 =𝑐𝑝𝑇
′2 + 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇 (𝑇1 − 𝑇 ′
2)
𝑐𝑝 − 𝐿ℎ𝜕𝑓𝑠𝜕𝑇
for (a)
𝑇2 =𝑐𝑝𝑇
′2 + 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇 (𝑇𝑙 − 𝑇 ′
2)
𝑐𝑝 − 𝐿ℎ𝜕𝑓𝑠𝜕𝑇
for (b)
Dongke Sun (Southeast University) January 31, 2019 50 / 64

Governing Equation
Heat Transfer with Phase Change
2 Temperature Recovery Method
𝜌𝑐𝑝𝜕𝑇 ′
𝜕𝑡= ∇ · (𝜆∇𝑇 ) ⇒
𝑇2 =𝑐𝑝𝑇
′2 + 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇 (𝑇𝑙 − 𝑇𝑠)
𝑐𝑝 − 𝐿ℎ𝜕𝑓𝑠𝜕𝑇
for (c)
𝑇2 =𝑐𝑝𝑇
′2 + 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇 (𝑇1 − 𝑇𝑠)
𝑐𝑝 − 𝐿ℎ𝜕𝑓𝑠𝜕𝑇
for (d)
Dongke Sun (Southeast University) January 31, 2019 50 / 64

Governing Equation
Heat Transfer with Phase Change
2 Temperature Recovery Method
𝑇2 =𝑐𝑝𝑇
′2 + 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇 (𝑇1 − 𝑇 ′
2)
𝑐𝑝 − 𝐿ℎ𝜕𝑓𝑠𝜕𝑇
for (a) 𝑇2 =𝑐𝑝𝑇
′2 + 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇 (𝑇𝑙 − 𝑇 ′
2)
𝑐𝑝 − 𝐿ℎ𝜕𝑓𝑠𝜕𝑇
for (b)
𝑇2 =𝑐𝑝𝑇
′2 + 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇 (𝑇𝑙 − 𝑇𝑠)
𝑐𝑝 − 𝐿ℎ𝜕𝑓𝑠𝜕𝑇
for (c) 𝑇2 =𝑐𝑝𝑇
′2 + 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇 (𝑇1 − 𝑇𝑠)
𝑐𝑝for (d)
Dongke Sun (Southeast University) January 31, 2019 50 / 64

Governing Equation
Heat Transfer with Phase Change
3 Enthalpy Method
Substitute𝜕𝐻
𝜕𝑇= 𝑐𝑝 − 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇
into 𝜌
(︂𝑐𝑝 − 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇
)︂𝜕𝑇
𝜕𝑡= ∇ · (𝜆∇𝑇 )
we obtain 𝜌𝜕𝐻
𝜕𝑇
𝜕𝑇
𝜕𝑡= ∇ · (𝜆∇𝑇 ) ⇒ 𝜌
𝜕𝐻
𝜕𝑡= ∇ · (𝜆∇𝑇 ) (7)
Then,𝐻𝑡+Δ𝑡
𝑖 −𝐻𝑡𝑖
∆𝑡=
𝜆
𝜌
𝑇 𝑡𝑖−1 − 2𝑇 𝑡
𝑖 + 𝑇 𝑡𝑖+1
(∆𝑥)2with ∆𝑡 6
𝜌𝑐𝑝(∆𝑥)2
2𝜆(8)
(a) Pure metals or eutectic (b) carbon steels (c) Al-4.5wt%Cu
Dongke Sun (Southeast University) January 31, 2019 51 / 64

Governing Equation
Heat Transfer with Phase Change
3 Enthalpy Method
Substitute𝜕𝐻
𝜕𝑇= 𝑐𝑝 − 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇
into 𝜌
(︂𝑐𝑝 − 𝐿ℎ
𝜕𝑓𝑠𝜕𝑇
)︂𝜕𝑇
𝜕𝑡= ∇ · (𝜆∇𝑇 )
we obtain 𝜌𝜕𝐻
𝜕𝑇
𝜕𝑇
𝜕𝑡= ∇ · (𝜆∇𝑇 ) ⇒ 𝜌
𝜕𝐻
𝜕𝑡= ∇ · (𝜆∇𝑇 ) (7)
Then,𝐻𝑡+Δ𝑡
𝑖 −𝐻𝑡𝑖
∆𝑡=
𝜆
𝜌
𝑇 𝑡𝑖−1 − 2𝑇 𝑡
𝑖 + 𝑇 𝑡𝑖+1
(∆𝑥)2with ∆𝑡 6
𝜌𝑐𝑝(∆𝑥)2
2𝜆(8)
(a) Pure metals or eutectic (b) carbon steels (c) Al-4.5wt%Cu
Dongke Sun (Southeast University) January 31, 2019 51 / 64

Governing Equation
Heat Transfer with Phase Change
Solid fraction and TemperatureLinear distribution of latent heat
𝑇 = 𝑇𝐿 − (𝑇𝐿 − 𝑇𝑆)𝑓𝑠 ⇒ 𝜕𝑓𝑠𝜕𝑇
= − 1
𝑇𝐿 − 𝑇𝑆(9)
Lever rule (Equilibrium solidification model)
𝑓𝑠 =1
1 − 𝑘0
𝑇𝑙 − 𝑇
𝑇𝑚 − 𝑇⇒ 𝜕𝑓𝑠
𝜕𝑇=
1
𝑘0 − 1
𝑇𝑚 − 𝑇𝑙
(𝑇𝑚 − 𝑇 )2(10)
Scheil model
𝑓𝑠 = 1 −(︂
𝐶𝑆
𝑘0𝐶0
)︂1/(𝑘0−1)
= 1 −(︂𝑇𝑚 − 𝑇
𝑇𝑚 − 𝑇𝑙
)︂1/(𝑘0−1)
⇒ 𝜕𝑓𝑠𝜕𝑇
=1
𝑘0 − 1
(𝑇𝑚 − 𝑇 )(2−𝑘0)/(𝑘0−1)
(𝑇𝑚 − 𝑇𝑙)1/(𝑘0−1)
(11)
Dongke Sun (Southeast University) January 31, 2019 52 / 64

In the Polar Coordinates
OUTLINE
6 Introduction
7 Governing Equation
8 In the Polar Coordinates
9 Worked Examples
10 Summary
Dongke Sun (Southeast University) January 31, 2019 53 / 64

In the Polar Coordinates
Heat Conduction in Polar Coordinates
A Two-Dimensional Situation in Polar Coordinates
𝜌𝑐𝜕𝑇
𝜕𝑡=
1
𝑟
𝜕
𝜕𝑟
(︂𝑟𝑘
𝜕𝑇
𝜕𝑟
)︂+
1
𝑟
𝜕
𝜕𝜃
(︂𝑘
𝑟
𝜕𝑇
𝜕𝑟
)︂+ 𝑆 (57)
Dongke Sun (Southeast University) January 31, 2019 54 / 64

In the Polar Coordinates
Heat Conduction in Polar Coordinates
Following the same procedure as in Coordinates, we obtain thediscretization equation
𝑎𝑃𝑇𝑃 = 𝑎𝐸𝑇𝐸 + 𝑎𝑊𝑇𝑊 + 𝑎𝑁𝑇𝑁 + 𝑎𝑆𝑇𝑆 + 𝑏 (58)
where𝑎𝐸 =
𝑘𝑒∆𝑟
𝑟𝑒(𝛿𝜃)𝑒𝑎𝑁 =
𝑘𝑛𝑟𝑛∆𝜃
(𝛿𝑟)𝑛
𝑎𝑊 =𝑘𝑤∆𝑟
𝑟𝑤(𝛿𝜃)𝑤𝑎𝑆 =
𝑘𝑠𝑟𝑠∆𝜃
(𝛿𝑟)𝑠
𝑎0𝑃 =𝜌𝑐∆𝑉
∆𝑡𝑏 = 𝑆𝐶∆𝑉 + 𝑎0𝑃𝑇
0𝑃
𝑎𝑃 = 𝑎𝐸 + 𝑎𝑊 + 𝑎𝑁 + 𝑎𝑆 + 𝑎0𝑃 − 𝑆𝑃∆𝑉
(59)
Here ∆𝑉 is the volume of the control volume. ∆𝑉 = 0.5(𝑟𝑛 + 𝑟𝑠)∆𝜃∆𝑟. Itis not necessarily equal to 𝑟𝑝∆𝜃∆𝑟, unless 𝑃 lies midway between 𝑛 and 𝑠.
Dongke Sun (Southeast University) January 31, 2019 55 / 64

Worked Examples
OUTLINE
6 Introduction
7 Governing Equation
8 In the Polar Coordinates
9 Worked Examples
10 Summary
Dongke Sun (Southeast University) January 31, 2019 56 / 64

Worked Examples
Worked Examples
Example 1: A plane wall
Example 2: 1-D transient heat conduction with two sub-domains
Dongke Sun (Southeast University) January 31, 2019 57 / 64

Worked Examples
Worked Examples
Example 3: Directional solidification 2-D, ∆𝑥 = ∆𝑦
Dongke Sun (Southeast University) January 31, 2019 58 / 64

Worked Examples
Worked Examples
Example 4: Conventional casting 2-D, ∆𝑥 = ∆𝑦
Dongke Sun (Southeast University) January 31, 2019 59 / 64

Worked Examples
Worked Examples
Example 5: A hollow sphere
Dongke Sun (Southeast University) January 31, 2019 60 / 64

Worked Examples
Worked Examples
Example 6: Cylindrical metal mold 3-D, ∆𝑟 = ∆𝑧
Dongke Sun (Southeast University) January 31, 2019 61 / 64
Summary
OUTLINE
6 Introduction
7 Governing Equation
8 In the Polar Coordinates
9 Worked Examples
10 Summary
Dongke Sun (Southeast University) January 31, 2019 62 / 64

Summary
Summary of Heat Conduction
The governing equation with a source term
𝜌𝑐𝑝𝜕𝑇
𝜕𝑡= ∇ · (𝜆∇𝑇 ) + 𝜌𝐿ℎ
𝜕𝑓𝑠𝜕𝑡
.
1 Briefly explain the equivalent specific heat method and temperaturerecovery method for solving source term.
2 Explain the approaches to increase computational efficiency of explicitmethod.
3 Draw the flowcharts in which the latent heat is treated using theequivalent specific heat method and temperature recovery method.
4 Based on node 5 calculate the time step (1-D transient heatconduction problems with two sub-domains).
5 Using finite volume method to write down the finite differenceequation for the temperature field calculation, including coefficientterms of each node (2-D Conventional metal mold).
Dongke Sun (Southeast University) January 31, 2019 63 / 64

谢谢!
欢迎提问
Dongke Sun (Southeast University) January 31, 2019 64 / 64