1. 2 2004 team jared schott josh shreve caitlin vanderbush nate stockey john shoots mike wilson...
Post on 19-Dec-2015
213 views
TRANSCRIPT

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
1

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
2
2004 TeamJared Schott
Josh Shreve
Caitlin
Vanderbush
Nate StockeyJohn Shoots
Mike Wilson
Stephanie Sprague

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
3
METEOR BACKGROUND
• To our knowledge, METEOR is the first, university-based, project in the world whose ultimate goal is to launch and place small payloads:– (1) In low Earth Orbit, – (2) on near Earth asteroids, and – (3) lunar surfaces will serve as launching point for future projects,
experiments, and research
• Benefits of Launching from upper atmosphere– <1% atmospheric density of sea level
• Less parasitic drag. Rockets can be launched without payload caps– Eliminates the need for permanent ground launch facilities– Enables launches from different latitudes

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
4
Project Objective:
Design a recoverable, airborne, high altitude, balloon tethered, 3-axes
stabilized platform for future small rocket launches and near space
scientific experiments
Challenges:To design a system for the rigors of near space (>80,000’),
• <1% atmospheric density
• High temperature range
• Fast and high temperature changes
• Radiation
• Limited weight

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
5
Balloon System Architecture
Zero Pressure Balloon
Cut-Down Device
Parachute
Platform

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
6
– Accommodate 2 lb Rocket
– Stepper Motor Orientation Device
– 6 lb platform/payload weight limit
– Simulated payload• High Definition Digital
Camera
Design

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
7
System Block Diagram
Digital Compass
M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
8
Flight Computer/FPGA• Altera Apex 20K Development Board
– Nios Processor @ 33.33 MHz• 32 bit Processor Core• Virtually Unlimited Serial Ports• Architecture is Defined via GUI/Block Diagram
– 5V Digital I/Os through custom daughter-card– 1 Mbyte FLASH Memory
• 512 Kbytes Data Memory• Allows Storage of Two Processor Layouts

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
9
Communications• Kenwood TH-D7A(G)
– Built in TNC – APRS Capable
• Global Positioning System (GPS)– Navman Jupiter 8 – NMEA Compatible
• Non-System beacon– 147.80 MHz
• 7 messages in Morse Code

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
10
ATV and High Resolution Camera• Amateur Television (ATV)
– Downlink Only: 439.25 MHz (Cable Channel 60)• Low Resolution Board Camera
– Monitor payload
• Video TX• Video OSD
• High Resolution Camera• 5 Mega Pixel Camera Donated by• Payload (first mission)
M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
11
Cut-down Device• Why do we need a cut-down device?
– Detach balloon from system after mission phase is complete– Satisfy FAA requirements
• NiChrome wire– Melts through fishing line when sufficient current passed
through• 2 Methods of current activation for redundancy
– Wireless System• KEYFOB TX on platform, RX on cut-down device• Passes current through NiChrome upon command
– PIC Controller (Microchip 12F675)• Redundancy in case of system failure• Cuts down after pre-programmed time

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
12
Power• Batteries
– Three Battery Packs• UltraLife 9 Volt Lithium Batteries• Regulated to 5 Volts
– 2 batteries in parallel» Stepper Motor
• 9 Volts– 6 batteries in parallel
» Nios and connected circuitry
• Regulated to 12 Volts– 3 sets of 2 batteries in series in parallel
» ATV (Video TX, OSD, Low-Res Camera)
– Donated by

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
13
Sensors• Magnetic Compass
– Heading information• Pressure• Temperature (Internal, External)• Accelerometer
– X,Y,Z acceleration
– Donated by

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
14
Tracking/Recovery• Ground Station
– Mobile Equipment Used• Van, Laptops, 2m XCVR, GPS, Antennas (Mobile,
Yagi), Maps (Aeronautical, Road), TV/VCR, Cell Phones
– Positions• Range Officer, Flight Director, Communications,
Sensors, Dynamics, Payload, CapCom, Recovery Teams

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
15
Dynamic Simulation
•Atmospheric Soundings for
current wind conditions
•Updatable APRS data from
the platform
•Flight Predictions
•Buoyant forces
•Velocity based drag
•Elevation based gas
property lookups

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
16
•Descent path, landing
position and mapping
•Location recalculated to
Longitude and Latitude
•Necessary to assess
optimal cut-down time and
landing location
•Post-Mission analysis for
improvement of model
M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
17
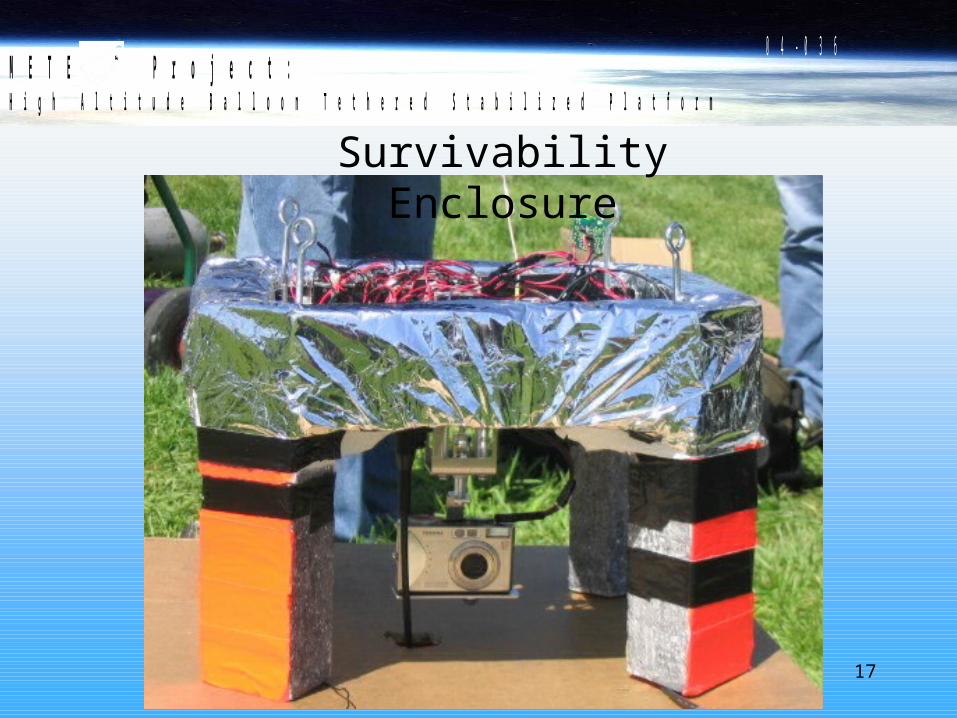
Survivability Enclosure

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
18
Conclusions• Senior Design Requirements
– Provided a prototype of launch platform– Includes necessary hardware to conduct successful
launch
• Improvements/Suggestions– Carbon Fiber Structure– Batteries that can provide more current– Lower power consumption– Integrated orientation control system

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
19
Questions?

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
20
BACKUP

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
21
Motivation for New Design
• Motivation– Smaller Rocket– Federal Aviation Administration Regulations
• Ease of launching
– Senior Design Schedule

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
22
RS-232 Interface
LAPTOPAX.25 Packet
Decoder
AX.25 Packet
EncoderMobile
144 MHz Transceiver
Handheld144 MHz
Transceiver
AX.25 Packet
Encoder
AX.25 Packet
Decoder
RS-232 Interface
Nios
2 m
LNA
70 cm
Amateur TVTransmitter
Video OSDLR CamAmateur TV
ReceiverTV
DisplayVCR
Emergency DF Setup
2m Beacon
RS-232
Packet Modem Packet Modem
GROUND PLATFORM

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
23
• Ascent and Recovery Stage– Balloon
• Zero-Pressure Balloon– Allows for pressure to equilibrate
• Initial Volume of 357.9 ft2
• Final Volume of 19,000 ft2
– Parachute• 5 ft diameter nylon
• Terminal Velocity of 22 ft/s

M E T E R P r o j e c t :H i g h A l t i t u d e B a l l o o n T e t h e r e d S t a b i l i z e d P l a t f o r m
0 4 - 0 3 6
24
Rules & Regulations
•Title 14 of the Code of Federal Regulations• Part 101: Moored Balloons, Kites, Unmanned Rockets and Unmanned Free Balloons
•Title 47 of the Code of Federal Regulations
• Part 97: Amateur Radio Service