1.ベクトル ベクトル:方向を持つ量。 ベクトルに...
TRANSCRIPT

1.ベクトル
ベクトル:方向を持つ量。
ベクトルには、 ①方向 ②大きさ(長さ)
という2つの属性がある。
ベクトルの例:
物体の移動速度、移動量物体の移動速度、移動量
電場、磁場の強さ
風速
力
トルク
など

2.ベクトルの表現
2.1 矢印で表現される。
○ 矢印の長さ: ベクトルの大きさ
○ 矢印の向き: ベクトルの方向
2.2 2個の点を用いて表現する。
○ 始点(A)と終点(B)を結ぶ半直線の向き: ベクトルの方向
○ 2点間の距離がベクトルの大きさを表す。
B
A
V

3.ベクトルの足算
ベクトルUとVの和を求めるために、ある点AにUの始点を
持っていく。次に、ベクトルVの始点をUの終点に持っていく。
この時のVの終点をCとする。 Aを始点とし、 C を終点とする
ベクトルWはUとV の和、つまりU+Vとし、次の式で表す。
上記の操作において、UとVを入替え
W=U+V CW上記の操作において、UとVを入替え
ても、最後の終点の位置は同じなので、
が成り立つ、つまり交換律が成立つ。
A B
VV
U
W
W=U+V=V+U

4.ベクトルの引算
引算は足算の逆計算として定義される。W=U+Vなら、
VはWとUの差として定義され、次の式で表す。
V=W----U
CW=U+V
A B
V=W-UV
U

5.ベクトルと数値との掛算(スカラー積)
ベクトルAと数値kとの積Cは、Aの方向を変えずに、その長
さをk 倍であるベクトルであり、次の式で表す。
C==== kA
C=kA|A|
k|A|
C=kA
A
|A|

6.ベクトルの内積
ベクトルAとBとの内積は、 Aの長さとBの長さと、 AとBの間の角度の余弦との積である。次の式で表す。
θcos|||| BABA =⋅
A
B
θ
θcos||B=l

内積の性質
1111::::
が成立つので、定義により
特例:
2:AとBが直交している場合、
2|| AAA =⋅
)cos(cos θθ −=ABBA ⋅=⋅
BABAABAB ⋅==−=⋅ θθ cos||||)cos(||||
2:AとBが直交している場合、
0)9090cos(|||| =−=⋅ oo或いはBABA

7.ベクトルと3次元座標
ベクトルAの X, Y, Z 座標はそれぞれ , , とし、X, Y, Z 軸の単位ベクトルをそれぞれ i, j, k とすれば、AのX, Y, Z成分 は次のように表現できる。
Ax Ay Az
Y
ZYX vvv ,,
==
jv
iv
AY
AX
y
x
したがって、
A
Ax
Ay
Xv
Yv
ij
X
= kv AZ z
kjivvvA AAAZYX zyx ++=++=

8 3次元ベクトルの足し算、引き算
足し算
+++
=
+
BA
BA
B
B
A
A
zz
yy
xx
z
y
x
z
y
x
引き算
+ BABA zzzz
−−−
=
−
BA
BA
BA
B
B
B
A
A
A
zz
yy
xx
z
y
x
z
y
x

9 直線のベクトル表現
点 と を結ぶ直線を、その直線上の任意の点 を用い
て表現する。
ベクトル は と同じ向きなので、その間の
違いは大きさ(長さ)だけである。従って、両者の関係は
次の式で表現できる。
2p1p
12 pp −
p
1pp −
)( 121 pppp −=− t
ここで、 、 は の長さ、
は の長さである。
とすれば、 が得られ、
P
P1
P2
||
||
12
1
pppp
−−=t || 1pp − || 12 pp −
12 pp −
1pp −
1pvp += t
)( 121 pppp −=− t
12 ppv −= vpp t=− 1
v

10 3次元ベクトルの内積
一方、
kjiA AAA zyx ++= kjiB BBB zyx ++=
kkjkik
kjjjij
kijiiiBA
⋅+⋅+⋅+⋅+⋅+⋅
+⋅+⋅+⋅=⋅
BABABA
BABABA
BABABA
zzyzxz
zyyyxy
zxyxxx
一方、
が成立するため、
0=⋅=⋅=⋅=⋅=⋅=⋅ jkikkjijkiji
1=⋅=⋅=⋅ kkjjii
BABABA zzyyxx ++=⋅BA
10 3次元ベクトルの内積(続き)
とすると、
BABABA zzyyxx ++=⋅BA
=
= B
B
A
A
y
x
y
x
BA
BA zz
ABBABA TT ==⋅

11 3次元空間内の平面
平面の性質:
1.平面上にある平行でない直線と直交する直線は
平面上のすべての直線と直交する。
その直線のことを法線という。
平面planeの法線ベクトルを とし、平面上の既知の1つn
planep0 p
平面planeの法線ベクトルを とし、平面上の既知の1つ
の点を とし、 を平面上の任意の点とする。
ベクトル と と直交するために、
あるいは、
0p
0)( 0 =⋅− nppn
np
0pp − n
00 =⋅−⋅ pnpn

12 平面と直線との交差点
直線の方程式:
平面の方程式:
交差点は平面と直線の両方にあるために、両方の方程式
を満たしている。
00 =⋅−⋅ pnpn1pvp += t
+= 1pvp t
この連立方程式より、
したがって、
=⋅−⋅+=
00
1
pnpn
pvp t
001 =⋅−⋅+⋅ pnpnvnt
vnppn
⋅−⋅= )( 01t
101 )(
pvvn
ppnp +
⋅−⋅=

練習問題1
1.1 点 と点 を通る直線の方程式
を求めなさい。
1.2 点 と点 を通る直線の方程式
を求めなさい。
=4
3
2
1p
=8
6
4
2p
=0
0
0
1p
=4
3
2
2p
2
4 1
1.3 点 と点 を通る直線と点 を通り、ベクトル
と垂直する平面との交差点を求めなさい。
=4
3
2
1p
=8
6
4
2p
=3
2
1
3p
=1
1
4
n

ベクトル、座標軸と座標
P
原点 座標軸
Xxi
θθθθ
θcos|| P=x
PiiP ⋅== θcos||||x
PiPi T=⋅=x

3次元座標系とベクトル(点)の座標
ベクトル(点)Pの x, y, z 座標は、P と X, Y, Z 軸の単位ベクトル i, j, k との内積を表すことができる。
=⋅==⋅=
PjPj
PiPiT
T
y
x
=⋅==⋅=
PkPk
PjPjT
T
z
y(1)

回転変換
PがO-XYZにおける座標が既知
O’-X’Y’Z’ 座標系におけるPの座標を求める問題である。
Y
P= (x, y, z) = (x', y', z')
Y'
y
X
X'
O
= (x', y', z')
y'x'
x

回転変換
前提条件:
● PがO-XYZにおける座標 x,y,z
● O’-X’Y’Z’ 座標系の各軸の単位ベクトルがO-XYZにおける
座標が既知であること。
P
k'
j'
i'
Pk'
Pj'
Pi'
'
'
'
=
=
T
T
T
T
T
T
z
y
x
===
Pk''
Pj''
Pi''
T
T
T
z
y
x

とすると、
=
=
='
'
'
k',
'
'
'
j',
'
'
'
i'
z
y
x
z
y
x
z
y
x
j
j
j
j
j
j
i
i
i
xiiix ''''
=
z
y
x
kkk
jjj
iii
z
y
x
zyx
zyx
zyx
'''
'''
'''
'
'
'
回転行列は変換先の座標軸の単位ベクトルのである

[ ]
=
⋅⋅⋅⋅⋅⋅⋅⋅⋅
=
=100
010
001
k'k'j'k'i'k'
k'j'j'j'i'j'
k'i'j'i'i'i'
k'j'i'
k'
j'
i'
RRT
T
T
T
回転行列の性質
TRR =1-

=='''
'''
'''1
zzz
yyy
xxxT-
kji
kji
kji
RR
=
'
'
'1
z
y
x
z
y
x-R
回転行列の性質
したがって、
=
=
='
'
'
,
'
'
'
,
'
'
'
z
z
z
y
y
y
x
x
x
k
j
i
k
j
i
k
j
i
kji

座標変換
PがO-XYZにおける座標が既知
O’-X’Y’Z’ 座標系におけるPの座標を求める問題である。
Y
X'
Y'
P'= P-O'
XO
P'
O'P

( )( )( )
−⋅=−⋅=−⋅=
O'Pk'
O'Pj'
O'Pi'
'
'
'
z
y
x
したがって
i'i'' TTx
並進ベクトル
O'
k'
j'
i'
P
k'
j'
i'
'
'
'
−
=
T
T
T
T
z
y
x

回転行列の計算
回転軸と回転角度から

3次元ベクトルの外積
=
=
z
y
x
z
y
x
b
b
b
a
a
a
BA 、 とすると、
したがって、したがって、
( ) ( )
kkkjki
jkjjji
ikijii
kjikjiBA
×+×+×
+×+×+×
+×+×+×=
++×++=×
zzxyzx
xzyyyx
xzxyxx
zyxzyx
bababa
bababa
bababa
bbbaaa

iとj, jとk, そしてkとiは垂直である。したがって、
0=×=×=× kkjjii
jkijik
ijkikj
kijkji
−=×=×−=×=×
−=×=×
i, j, kはX, Y, Z 軸の単位ベクトルで、iとi, jとj, そしてkとkは平行である。だから、
したがって、
jkijik −=×=×
kji
BA
)()()( yxxyzxxzzyyz babababababa +−+−++−=×

zyx
zyx
bbb
aaa
kji
BA =×
簡単な記述法として、ベクトルの表現なら
行列の表現なら、まず を下記のように定義すると][×A行列の表現なら、まず を下記のように定義すると][×A
−−
−=×
0
0
0
][
xy
xz
yz
aa
aa
aa
A
+−−+−
==× ×
yxxy
zxxz
zyyz
baba
baba
baba
BABA ][
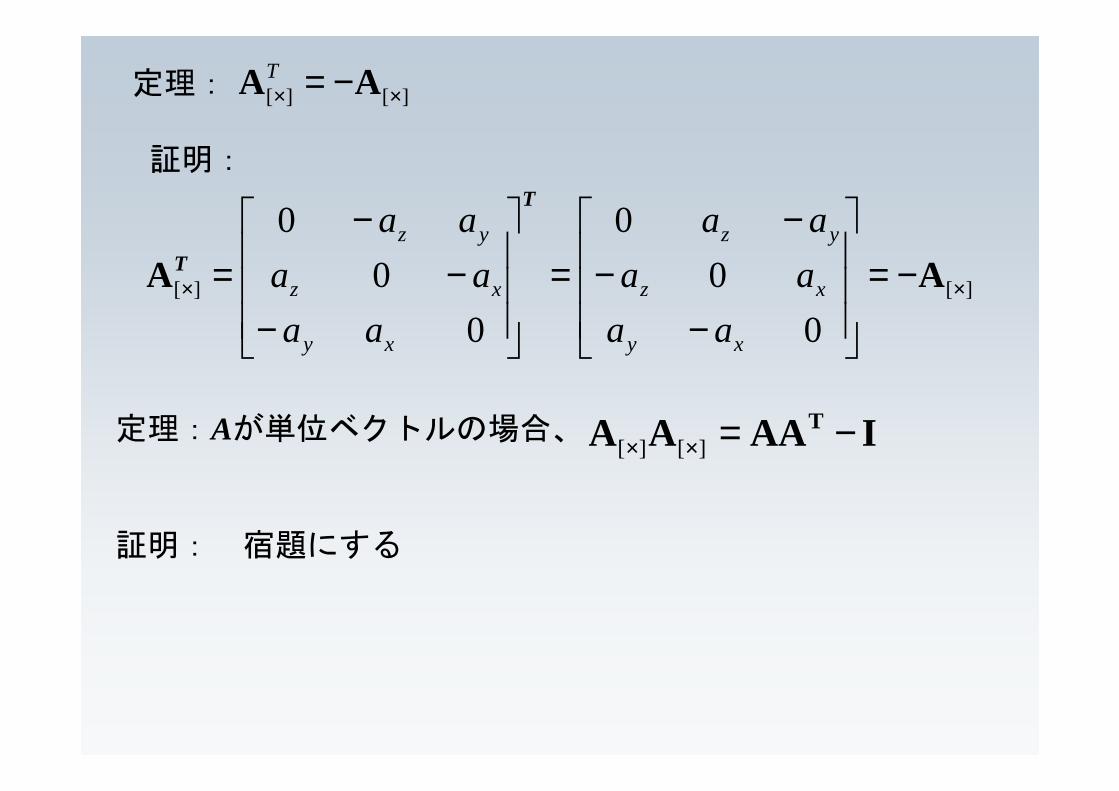
定理:
][][
0
0
0
0
0
0
×× −=
−−
−=
−−
−= AA
xy
xz
yz
xy
xz
yz
aa
aa
aa
aa
aa
aaT
T
][][ ×× −= AAT
証明:
定理:Aが単位ベクトルの場合、
証明: 宿題にする
IAAAA T −=×× ][][

Y
XO
P’= (x’,y’)
P=(x,y)
y’
x’ x
y
θ
α
ρ
ρ
3次元の回転変換:
回転軸がZ軸の場合
===
zz
yy
xx
'
'
'
回転後の
回転後の
+=+=−=+=
θαρθαρθαρθαρθαρθαρ
sin)cos(cos)sin()sin('
sin)sin(cos)cos()cos('
y
x
+=−=
θθθθ
cossin'
sincos'
yxy
yxx
したがって

一般的な場合における回転変換
1.まず、回転軸を Z 軸とする座標系の設定
2.点の座標をその座標系に変換する
3.Z 軸まわりの回転変換を行う
4.変換した後の座標を元の座標系に戻k
P’ 回転後
4.変換した後の座標を元の座標系に戻
す
O
θ
回転軸
i
j
k
P
回転前

ω:回転軸の単位ベクトル、k:新しい座標系のZ軸の単位ベクトル点Pの新しい座標系でのZ座標は
θ
回転軸
j
k
P
P’[ ]PkPk
ωkω
T
Tzyx
z =⋅=
== ωωω
ベクトルPとkと垂直な方向をY軸の方向とすると、
Y軸の単位ベクトルj、そしてPの新しい座標系での
( )0
| TTT
=⋅=
−===
××=
××
×
××
×
××
×
Pj
PkkP
Pk
PkkP
Pk
PkPk
Pk
PkPk
j][][
][
][][
][
][][
][
y
| T
OiY軸の単位ベクトルj、そしてPの新しい座標系での
Y座標は
PkkP
PkkP
Pkkjkkji
][][
][][
××
××
−−=×−=×=
T
T
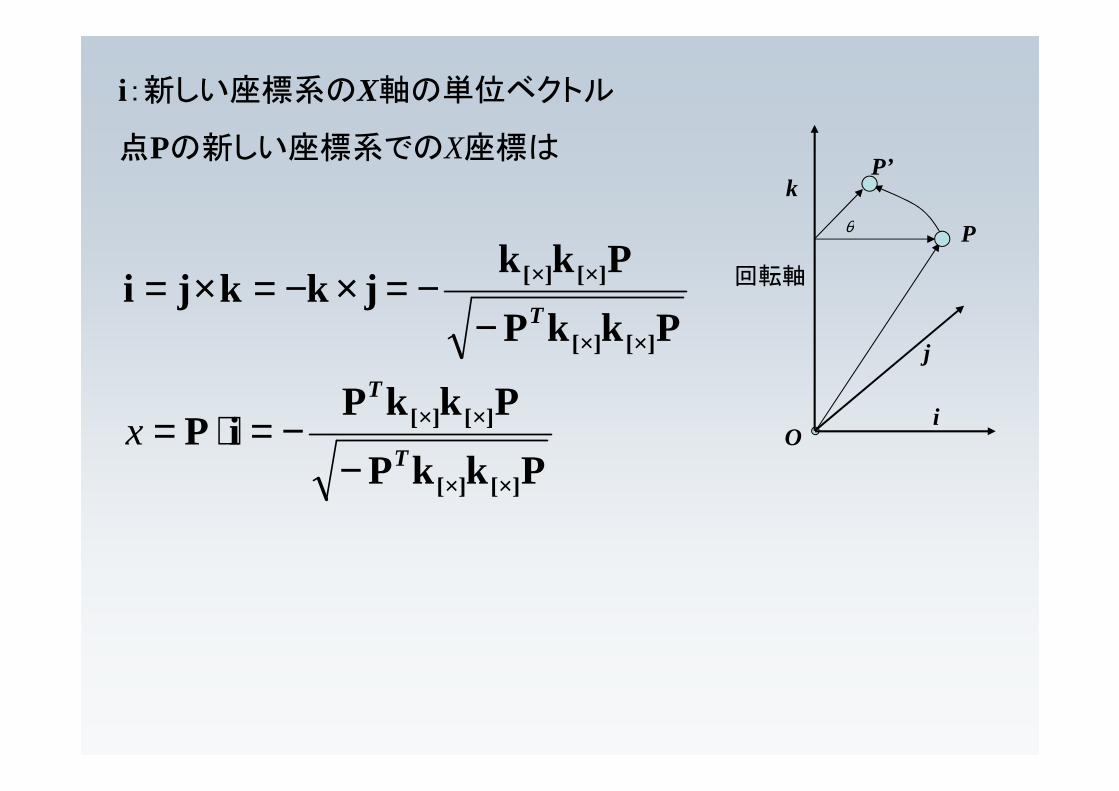
i:新しい座標系のX軸の単位ベクトル
点Pの新しい座標系でのX座標は
θ
回転軸
j
k
P
P’
PkkP
PkkPiP
][][
][][
××
××
−−=⋅=
T
T
x Oi

回転後の座標:
−−=+=
−−=−=
××
××
××
××
PkkP
PkkP
PkkP
PkkP
][][
][][
][][
][][
T
T
T
T
yxy
yxx
sincossin'
cossincos'
θθθ
θθθ
== PkTzz'

回転後の座標:
PkkPkkPPk
PkkPPkk
PkkPPkkkji
][][][
][][][][
][][][][
TT
TT
T
P
+−
−−=++=
×××
××××
××××
θ
θ
sin
cos'''' zyxP
( )( )PkkkkkI
PkkPkPkk
PkkPkkPPkkP
][
][][][
][][][][
TT
T
TT
++−=
++−=
+−−
−
×
×××
××××
θθ
θθ
θ
sincos
sincos
sin

回転行列:
( ) TTωωωωωIR
RPP
][ ++−==
× θθ sincos
'

回転変換
回転行列:
( )( )( ) PωPωωP
PωωPωPωωIRPP
ωωωωωIR
][
][
sincos1cos
sincos'
sincos
T
TT
TT
+−+=
++−==
++−=
×
×
θθθ
θθ
θθ
( )( )
( ) ωPωPPω
PωPωωP
PωPωωP ][
)(cos1cossin
sin)(cos1cos
sincos1cos T
⋅−++×=×+⋅−+=
+−+= ×
θθθθθθ
θθθ