2+m``2migl2m` hgl2irq`fb *qmpqhmibqm hgl2m`...
TRANSCRIPT

NPFL114, Lecture 6
Convolutional Neural Networks III,
Recurrent Neural NetworksMilan Straka
April 08, 2019
Charles University in Prague Faculty of Mathematics and Physics Institute of Formal and Applied Linguistics
unless otherwise stated

Fast R-CNN
Figure 1 of paper "Fast R-CNN", https://arxiv.org/abs/1504.08083.
2/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Fast R-CNN
The bounding box is parametrized as follows. Let be center coordinates and
width and height of the RoI, and let be parameters of the bounding box. We
represent them as follows:
Usually a loss, or Huber loss, is employed for bounding box parameters
The complete loss is then
x , y ,w ,h r r r r
x, y,w,h
t x
t w
= (x − x )/w ,r r
= log(w/w ),r
t y
t h
= (y − y )/h r r
= log(h/h )r
smooth L 1
smooth (x) =L 1 {0.5x2
∣x∣ − 0.5if ∣x∣ < 1otherwise
L( , , c, t) =c t L ( , c) +cls c λ[c ≥ 1] smooth ( −i∈{x,y,w,h}
∑ L 1 ti t ).i
3/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Fast R-CNN
Intersection over unionFor two bounding boxes (or two masks) the intersection over union (IoU) is a ration of theintersection of the boxes (or masks) and the union of the boxes (or masks).
Choosing RoIs for trainingDuring training, we use images with RoIs each. The RoIs are selected so that have
intersection over union (IoU) overlap with ground-truth boxes at least 0.5; the others arechosen to have the IoU in range .
Choosing RoIs during inferenceSingle object can be found in multiple RoIs. To choose the most salient one, we perform non-maximum suppression -- we ignore RoIs which have an overlap with a higher scoring RoI of thesame type, where the IoU is larger than a given threshold (usually, 0.3 is used). Higher scoringRoI is the one with higher probability from the classification head.
2 64 25%
[0.1, 0.5)
4/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Object Detection Evaluation
Average PrecisionEvaluation is performed using Average Precision (AP).
We assume all bounding boxes (or masks) produced by a system have confidence values whichcan be used to rank them. Then, for a single class, we take the boxes (or masks) in the orderof the ranks and generate precision/recall curve, considering a bounding box correct if it hasIoU at least 0.5 with any ground-truth box. We define AP as an average of precisions for recalllevels .
Figure 6 of paper "The PASCAL Visual Object Classes (VOC) Challenge",http://homepages.inf.ed.ac.uk/ckiw/postscript/ijcv_voc09.pdf.
Figure 6 of paper "The PASCAL Visual Object Classes (VOC) Challenge",http://homepages.inf.ed.ac.uk/ckiw/postscript/ijcv_voc09.pdf.
0, 0.1, 0.2, … , 1
5/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Faster R-CNN
For Fast R-CNN, the most time consuming part is generating the RoIs.
Therefore, Faster R-CNN jointly generates regions of interest using a region proposal networkand performs object detection.
Figure 2 of paper "Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks", https://arxiv.org/abs/1506.01497
6/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Mask R-CNN
Figure 1 of paper "Mask R-CNN", https://arxiv.org/abs/1703.06870.
7/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Mask R-CNN
RoIAlignMore precise alignment is required for the RoI in order to predict the masks. Therefore, insteadof max-pooling used in the RoI pooling, RoIAlign with bilinear interpolation is used.
Figure 3 of paper "Mask R-CNN", https://arxiv.org/abs/1703.06870.
8/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Mask R-CNN
Masks are predicted in a third branch of the object detector.
Usually higher resolution is needed ( instead of ).
The masks are predicted for each class separately.The masks are predicted using convolutions instead of fully connected layers.
Figure 4 of paper "Mask R-CNN", https://arxiv.org/abs/1703.06870.
14 × 14 7 × 7
9/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Mask R-CNN
Table 2 of paper "Mask R-CNN", https://arxiv.org/abs/1703.06870.
10/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Mask R-CNN – Human Pose Estimation
Figure 7 of paper "Mask R-CNN", https://arxiv.org/abs/1703.06870.
Testing applicability of Mask R-CNN architecture.
Keypoints (e.g., left shoulder, right elbow, …) are detected as independent one-hot masks ofsize with output function.
Table 4 of paper "Mask R-CNN", https://arxiv.org/abs/1703.06870.
56 × 56 softmax
11/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Feature Pyramid Networks
(a) Featurized image pyramid
predict
predict
predict
predict
(b) Single feature map
predict
(d) Feature Pyramid Network
predict
predict
predict
(c) Pyramidal feature hierarchy
predict
predict
predict
Figure 1 of paper "Feature Pyramid Networks for Object Detection", https://arxiv.org/abs/1612.03144.
12/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Feature Pyramid Networks
predict
predict
predict
predict
Figure 2 of paper "Feature Pyramid Networks for Object Detection", https://arxiv.org/abs/1612.03144.
13/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Feature Pyramid Networks
2x up
1x1 conv +
pre dic t
pre dic t
pre dic t
Figure 3 of paper "Feature Pyramid Networks for Object Detection", https://arxiv.org/abs/1612.03144.
14/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Feature Pyramid Networks
image test-dev test-std
method backbone competition pyramid [email protected] AP APs APm APl [email protected] AP APs APm APl
ours, Faster R-CNN on FPN ResNet-101 - 59.1 36.2 18.2 39.0 48.2 58.5 35.8 17.5 38.7 47.8
Competition-winning single-model results follow:
G-RMI† Inception-ResNet 2016 - 34.7 - - - - - - - -
AttractioNet‡ [10] VGG16 + Wide ResNet§ 2016 53.4 35.7 15.6 38.0 52.7 52.9 35.3 14.7 37.6 51.9
Faster R-CNN +++ [16] ResNet-101 2015 55.7 34.9 15.6 38.7 50.9 - - - - -
Multipath [40] (on minival) VGG-16 2015 49.6 31.5 - - - - - - - -
ION‡ [2] VGG-16 2015 53.4 31.2 12.8 32.9 45.2 52.9 30.7 11.8 32.8 44.8
Table 4 of paper "Feature Pyramid Networks for Object Detection", https://arxiv.org/abs/1612.03144.
15/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Focal Loss
0 0.2 0.4 0.6 0.8 1
probability of ground truth class
0
1
2
3
4
5
loss
= 0 = 0.5
= 1 = 2
= 5
we ll- c la s s ifie de x a mple s
we ll- c la s s ifie de x a mple s
CE(pt) = − log(pt)
FL(pt) = −(1− pt)γ log(pt)
Figure 1 of paper "Focal Loss for Dense Object Detection", https://arxiv.org/abs/1708.02002.
For single-stage object detectionarchitectures, class imbalance has beenidentified as the main issue preventing toobtain performance comparable to two-stage detectors. In a single-stage detector,there can be tens of thousands of anchors,with only dozens of useful trainingexamples.
Cross-entropy loss is computed as
Focal-loss (loss focused on hard examples)is proposed as
L =cross-entropy − log p (y∣x).model
L =focal-loss −(1 − p (y∣x)) ⋅modelγ log p (y∣x).model
16/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Focal Loss
0 .2 .4 .6 .8 1
fraction of foreground examples
0
0.2
0.4
0.6
0.8
1
cu
mu
lative
no
rma
lize
d lo
ss
= 0
= 0.5
= 1
= 2
0 .2 .4 .6 .8 1
fraction of background examples
0
0.2
0.4
0.6
0.8
1
cu
mu
lative
no
rma
lize
d lo
ss
= 0
= 0.5
= 1
= 2
Figure 4. Cumulative distribution functions of the normalized loss for positive and negative samples for different values of γ for a converged
model. The effect of changing γ on the distribution of the loss for positive examples is minor. For negatives, however, increasing γ heavily
concentrates the loss on hard examples, focusing nearly all attention away from easy negatives.
Figure 4 of paper "Focal Loss for Dense Object Detection", https://arxiv.org/abs/1708.02002.
17/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

RetinaNet
RetineNet is a single-stage detector, using feature pyramid network architecture. Built on top ofResNet architecture, the feature pyramid contains levels through , with each having
256 channels and resolution lower than the input. On each pyramid level , we consider 9
anchors for every position, with 3 different aspect ratios ( , , ) and with 3 different
sizes ( ). The classification and boundary regression heads do not share
parameters and are fully convolutional, generating sigmoids and
bounding boxes per position.
c la s s+bo x s u bne ts c la s s
s u bne t
bo x s u bne t
W×H×2 5 6
W×H×2 5 6
W×H×4 A
W×H×2 5 6
W×H×2 5 6
W×H×K A×4
×4
+
+
c la s s+bo x s u bne ts
c la s s+bo x s u bne ts
(a ) R e sNe t (b) fe a tu re py ra mid ne t (c ) c la s s s u bne t (to p) (d) bo x s u bne t (bo tto m)
Figure 3 of paper "Focal Loss for Dense Object Detection", https://arxiv.org/abs/1708.02002.
P 3 P 7 P l
2l P l
1 1 : 2 2 : 1{2, 2 , 2 } ⋅1/3 2/3 4 ⋅ 2l
anchors ⋅ classes anchors
18/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

RetinaNet
During training we assign anchors to ground-truth object boxes if IoU is at least 0.5; tobackground if IoU with any ground-truth region is at most 0.4 (the rest of anchors are ignoredduring training). The classification head is trained using focal loss with (but according to
the paper, all values in range works well); the boundary regression head is trained using
loss as in Fast(er) R-CNN.
During inference, we consider at most 1000 objects with at least 0.05 probability from everypyramid level, merging the top predictions from all levels using non-maximum suppression with0.5 threshold.
backbone AP AP50 AP75 APS APM APL
Two-stage methods
Faster R-CNN+++ [16] ResNet-101-C4 34.9 55.7 37.4 15.6 38.7 50.9
Faster R-CNN w FPN [20] ResNet-101-FPN 36.2 59.1 39.0 18.2 39.0 48.2
Faster R-CNN by G-RMI [17] Inception-ResNet-v2 [34] 34.7 55.5 36.7 13.5 38.1 52.0
Faster R-CNN w TDM [32] Inception-ResNet-v2-TDM 36.8 57.7 39.2 16.2 39.8 52.1
One-stage methods
YOLOv2 [27] DarkNet-19 [27] 21.6 44.0 19.2 5.0 22.4 35.5
SSD513 [22, 9] ResNet-101-SSD 31.2 50.4 33.3 10.2 34.5 49.8
DSSD513 [9] ResNet-101-DSSD 33.2 53.3 35.2 13.0 35.4 51.1
RetinaNet (ours) ResNet-101-FPN 39.1 59.1 42.3 21.8 42.7 50.2
RetinaNet (ours) ResNeXt-101-FPN 40.8 61.1 44.1 24.1 44.2 51.2
Table 2 of paper "Focal Loss for Dense Object Detection", https://arxiv.org/abs/1708.02002.
γ = 2[0.5, 5]
smooth L 1
19/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Transfer Learning
In many situations, we would like to utilize a model trained on a different dataset – generally,this cross-dataset usage is called transfer learning.
In image processing, models trained on ImageNet are frequently used as general featureextraction models.
The easiest scenario is to take a ImageNet model, drop the last classification layer, and use theresult of the global average pooling as image features. The ImageNet model is not modifiedduring training.
For efficiency, we may precompute the image features once and reuse it later many times.
20/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Transfer Learning – Finetuning
After we have successfully trained a network employing an ImageNet model, we may improveperformance further by finetuning – training the full network including the ImageNet model,allowing the feature extraction to adapt to the current dataset.
The laters after the ImageNet models must be already trained to convergence.
Usually a smaller learning rate is necessary (for example one tenth of the original one, i.e.,0.0001 for Adam).
We have to think about batch normalization, data augmentation or other regularizationtechniques.
21/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Normalization
Batch NormalizationNeuron value is normalized across the minibatch, and in case of CNN also across all positions.
Layer NormalizationNeuron value is normalized across the layer.
H, W
C N
Batch Norm
H, W
C N
Layer Norm
H, W
C N
Instance Norm
H, W
C N
Group Norm
Figure 2 of paper "Group Normalization", https://arxiv.org/abs/1803.08494.
22/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Group Normalization
Group Normalization is analogous to Layer normalization, but the channels are normalized ingroups (by default, ).
H, W
C N
Batch Norm
H, W
C N
Layer Norm
H, W
C N
Instance Norm
H, W
C N
Group Norm
Figure 2 of paper "Group Normalization", https://arxiv.org/abs/1803.08494.
2481632
batch size (images per worker)
22
24
26
28
30
32
34
36
erro
r (%
)
Batch Norm
Group Norm
Figure 1 of paper "Group Normalization", https://arxiv.org/abs/1803.08494.
G = 32
23/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Group Normalization
0 10 20 30 40 50 60 70 80 90 100
epochs
20
25
30
35
40
45
50
55
60
erro
r (%
)
train error
Batch Norm (BN)
Layer Norm (LN)
Instance Norm (IN)
Group Norm (GN)
BNLN
IN
GN
0 10 20 30 40 50 60 70 80 90 100
epochs
20
25
30
35
40
45
50
55
60
erro
r (%
)
val error
Batch Norm (BN)
Layer Norm (LN)
Instance Norm (IN)
Group Norm (GN)
BN
LN
IN
GN
Figure 4. Compar ison of er ror curves with a batch size of 32 images/GPU. We show the ImageNet training error (left) and validation
error (right) vs. numbers of training epochs. The model is ResNet-50.
0 10 20 30 40 50 60 70 80 90 100
epochs
20
25
30
35
40
45
50
55
60
erro
r (%
)
Batch Norm (BN)
BN, 32 ims/gpu
BN, 16 ims/gpu
BN, 8 ims/gpu
BN, 4 ims/gpu
BN, 2 ims/gpu
0 10 20 30 40 50 60 70 80 90 100
epochs
20
25
30
35
40
45
50
55
60
erro
r (%
)
Group Norm (GN)
GN, 32 ims/gpu
GN, 16 ims/gpu
GN, 8 ims/gpu
GN, 4 ims/gpu
GN, 2 ims/gpu
Figure 5. Sensitivity to batch sizes: ResNet-50’s validation error of BN (left) and GN (right) trained with 32, 16, 8, 4, and 2 images/GPU.
Figures 4 and 5 of paper "Group Normalization", https://arxiv.org/abs/1803.08494.
24/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Group Normalization
Tables 4 and 5 of paper "Group Normalization", https://arxiv.org/abs/1803.08494.
25/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Recurrent Neural Networks
Recurrent Neural Networks
26/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Recurrent Neural Networks
Single RNN cell
input
output
state
Unrolled RNN cells
input 1
output 1
state
input 2
output 2
state
input 3
output 3
state
input 4
output 4
state
27/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Basic RNN Cell
input
previous state
output = new state
Given an input and previous state , the new state is computed as
One of the simplest possibilities is
x(t) s(t−1)
s =(t) f(s ,x ; θ).(t−1) (t)
s =(t) tanh(Us +(t−1) V x +(t) b).
28/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Basic RNN Cell
Basic RNN cells suffer a lot from vanishing/exploding gradients (the challenge of long-termdependencies).
If we simplify the recurrence of states to
we get
If has eigenvalue decomposition of , we get
The main problem is that the same function is iteratively applied many times.
Several more complex RNN cell variants have been proposed, which alleviate this issue to somedegree, namely LSTM and GRU.
s =(t) Us ,(t−1)
s =(t) U s .t (0)
U U = QΛQ−1
s =(t) QΛ Q s .t −1 (0)
29/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Basic RNN Applications
Sequence Element ClassificationUse outputs for individual elements.
input 1
output 1
state
input 2
output 2
state
input 3
output 3
state
input 4
output 4
state
Sequence RepresentationUse state after processing the whole sequence (alternatively, take output of the last element).
30/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Basic RNN Applications
Sequence PredictionDuring training, predict next sequence element.
BOS
x(0)
x(0)
x(1)
x(1)
x(2)
x(2)
x(3)
x(3)
EOS
During inference, use predicted elements as further inputs.
BOS
x(0)
x(1)
x(2)
x(3)
EOS
31/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM
Long Short-Term Memory
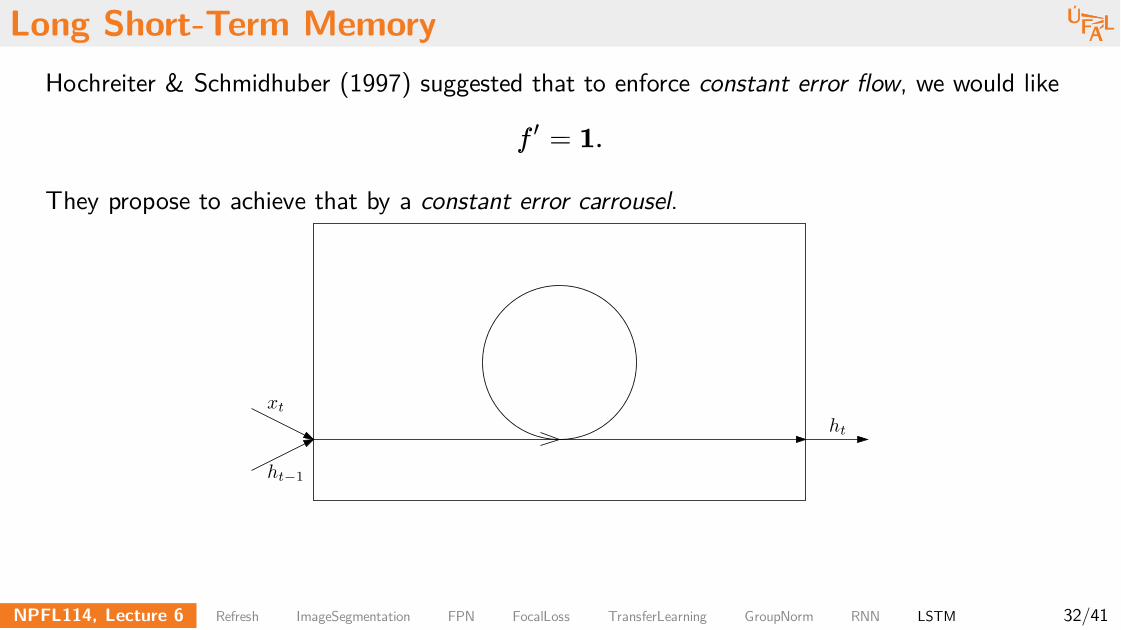
Hochreiter & Schmidhuber (1997) suggested that to enforce constant error flow, we would like
They propose to achieve that by a constant error carrousel.
xt
ht−1
ht
f =′ 1.
32/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Long Short-Term Memory
xt
ht−1
httanh
σ
xt ht−1
tanh
σ
xt ht−1
ct
They also propose an input and output gates which control the flow of information into and outof the carrousel (memory cell ).c t
i t
o t
c t
h t
← σ(W x + V h + b )it
it−1
i
← σ(W x + V h + b )ot
ot−1
o
← c + i ⋅ tanh(W x + V h + b )t−1 ty
ty
t−1y
← o ⋅ tanh(c )t t
33/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Long Short-Term Memory
xt
ht−1
httanh
σ
xt ht−1
tanh
σ
xt ht−1
ct
σ
ht−1xt
Later in Gers, Schmidhuber & Cummins (1999) a possibility to forget information from memorycell was added.c t
i t
f t
o t
c t
h t
← σ(W x + V h + b )it
it−1
i
← σ(W x + V h + b )ft
ft−1
f
← σ(W x + V h + b )ot
ot−1
o
← f ⋅ c + i ⋅ tanh(W x + V h + b )t t−1 ty
ty
t−1y
← o ⋅ tanh(c )t t
34/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Long Short-Term Memory
http://colah.github.io/posts/2015-08-Understanding-LSTMs/img/LSTM3-SimpleRNN.png
35/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Long Short-Term Memory
http://colah.github.io/posts/2015-08-Understanding-LSTMs/img/LSTM3-chain.png
36/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Long Short-Term Memory
http://colah.github.io/posts/2015-08-Understanding-LSTMs/img/LSTM3-C-line.png
37/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Long Short-Term Memory
http://colah.github.io/posts/2015-08-Understanding-LSTMs/img/LSTM3-focus-i.png
38/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Long Short-Term Memory
http://colah.github.io/posts/2015-08-Understanding-LSTMs/img/LSTM3-focus-f.png
39/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Long Short-Term Memory
http://colah.github.io/posts/2015-08-Understanding-LSTMs/img/LSTM3-focus-C.png
40/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM

Long Short-Term Memory
http://colah.github.io/posts/2015-08-Understanding-LSTMs/img/LSTM3-focus-o.png
41/41NPFL114, Lecture 6 Refresh ImageSegmentation FPN FocalLoss TransferLearning GroupNorm RNN LSTM