3d metamorphosis between different types of …cseweb.ucsd.edu/~jiamao/papers/morphing01.pdf ·...
TRANSCRIPT

EUROGRAPHICS2001/ A. ChalmersandT.-M. Rhyne(GuestEditors)
Volume20 (2001), Number3
3D MetamorphosisBetweenDiffer ent Typesof GeometricModels
David E. Breen
SeanMauch
RossT. Whitaker JiaMao
ComputerGraphicsGroup,CaliforniaInstituteof Technology, Pasadena,CA, USASCI Institute,Schoolof Computing,Universityof Utah,SaltLake City, UT, USA
AbstractWe presenta powerful morphingtechniquebasedon level set methods,that can be combinedwith a varietyof scanconversion/modelprocessingtechniques.Bringing thesetechniquestogethercreatesa general morphingapproach thatallowsa userto morphanumberof geometricmodeltypesin a singleanimation.Wehavedevelopedtechniquesfor convertingseveral typesof geometricmodels(polygonalmeshes,CSGmodelsandMRI scans)intodistancevolumes,thevolumetricrepresentationrequiredbyour levelsetmorphingapproach. Thecombinationofthesetwocapabilitiesallowsa userto createa morphingsequenceregardlessof themodeltypeof thesourceandtarget objects,freeinghim/herto usewhatevermodeltypeis appropriatefor a particular animation.
1. Intr oduction
3D metamorphosisis aprocesswhereonethree-dimensionalmodel(thesource)continuouslychangesinto anotherthree-dimensionalmodel(thetarget).Within thecomputergraph-ics communitymorphing(the vernacularfor metamorpho-sis) hasbeenusedfrequentlyfor specialeffects in movies,advertising,andentertainment.Image morphingtakesa 2Dimageof anobjectandtransformstheappearanceof thatob-ject into the appearanceof anotherobject,with the goal ofproducingnatural-appearing,or at leastsensible,intermedi-ate images.3D morphingalgorithmshave beendevelopedfor both surfacemodelsand volumetric models.The sur-facemodelalgorithmstransformthe surfacepatches(usu-ally polygons)of thesourcemodelinto thesurfacepatchesof thetargetmodel.Thevolume-basedmorphingalgorithmsrepresent3D objectsasvolumesandmanipulatethe voxelvaluesof volumesin orderto make onesolidobjectbecomeanother.
Numerousmorphingalgorithmshave beendevelopedinthepastseveralyears.Thecapabilitiesof all of thesemeth-ods have beendemonstratedwith morphingsequencesin-volving geometricmodelsof the sametype.The morphingsolutionsofferedto datecouldbemoregeneralandflexible.In orderto employ thesetechniquesa useris constrainedtousingonly onetypeof modelfor thesourceandtargetof the
morphingsequence.This limits theselectionof modelsthatmaybeusedfor aparticularmorphinganimation.
In order to addressthis limitation, we presenta power-ful morphingtechniquebasedon level setmethods,thatcanbe combinedwith a variety of scanconversion/modelpro-cessingtechniques.The combinationof level setmorphingwith a numberof volume generationalgorithmscreatesageneralmorphingapproachthatallowsauserto morphava-riety of geometricmodel typesin a singleanimation.Ourlevel setmorphingapproachconsistsof aspectsfrom bothsurfaceandvolumetricmetamorphosis.Themathematicsofourmorphingalgorithmis basedondeformablesurfaces,butits representationandnumericalcomputationsarevolumet-ric in nature,leadingto aflexible approachfor changingone3D object into another. We have developedtechniquesforconverting several typesof geometricmodelsinto distancevolumes,thevolumetricrepresentationrequiredby our levelsetmorphingapproach.Distancevolumesstoreateachvoxeltheshortestdistanceto thesurfaceof theobjectbeingrepre-sentedby thevolume.Thecombinationof thesetwocapabil-ities allows a userto createa morphingsequenceregardlessof the model type of the sourceandtarget objects,freeinghim/herto usewhatever modeltypeis appropriatefor apar-ticularanimation.
Wedemonstrateourmorphingcapabilitieswith ananima-tionof aheadthattransformsbetweenthreedifferentshapes.
c
TheEurographicsAssociationandBlackwellPublishers2001.Publishedby BlackwellPublishers,108 Cowley Road,Oxford OX4 1JF, UK and350 Main Street,Malden,MA02148,USA.

Breen,Mauch, Whitaker andMao/ 3D MetamorphosisBetweenDifferentTypesof GeometricModels
Figure1: Threeheadmodels:polygonalmesh,CSGmodel,andMRI scan(a 2D sliceanda cut-outiso-surface).
SeeFigure1. Theinitial headmodelis definedwith apolyg-onal mesh.The first shapemorphsinto a headthat is de-finedwith aConstructiveSolidGeometry(CSG)model.TheCSG-definedheadchangesinto the shapeof an actualhu-man headextractedfrom an MRI scan.In the final phaseof thesequence,theMRI-definedheadtransformsbackintotheoriginal head,which wasdefinedby a polygonalmodel.We have developed3D scanconversiontechniquesfor gen-eratingdistancevolumesfrom polygonalandCSGmodels.A distancevolumeis generatedfrom theMRI scanby firstfitting a level setmodelto aniso-surfacein thescan.A fastmarchingmethodis thenemployedto calculatetherequiredshortestdistances,thusproducinga distancevolume.Thesethreedistancevolumesarebroughtinto our level setframe-work to producethemorphingsequence.
2. PreviousWork
3D scanconversiontakesa 3D geometricmodel,a surfacein 3D or a solid model,andconverts it into a 3D volumedataset1 2, wherevoxels that contain the original surfaceor solid have a valueof one.The remainingvoxels have avalueof zero.Usingthevolume-samplingmethodsof Wang,Sramekand Kaufman3 4 aliasingartifactsmay be signifi-cantly reduced.Thesemethodsproducevoxels with valuesbetweenzero andone,wherenon-integer valuesrepresentvoxels partially occupiedby the original object.Scancon-vertedprimitivesmaythenbe rendered,or combinedusingCSGoperations.5 PayneandToga6 presentamethodfor cal-culatingdistancevolumesfrom a polygonalmodel.Exten-sionsto discretedistancetransforms7 8, e.g.Chamfermeth-ods,wereconsideredfor ourwork.They weredeemedinsuf-ficient for our needs,becausethey do not provide subvoxelaccuracy.
In recentyearsnumerous3D morphingalgorithmshavebeen reported in the literature. These algorithms gener-ally fall into two categories,surface-basedapproachesandvolume-basedapproaches.A third classof algorithmsin-volvesmorphingimplicit models,eitherby transformingthe
underlyingstructureof “blobby” models9, or by creatinghigherdimensionalinterpolatingimplicit functions.10
Kentet al.11 describedthefundamentalsof morphing3Dpolygonalsurfaces.Thefirst stepis to createa singletopo-logicaldescriptionof vertices,edgesandfacesthatcontainsthe combinedtopologicalstructureof both the sourceandtargetsurfaces.Theverticesof thestructurearetheninterpo-latedbetweentheirpositionontheinitial surfaceto theirpo-sition on thetargetsurface.Leeet al.12 applymany of thesesurface-basedmethodsto morphingmultiresolutionmeshes.RossignacandKaul13 introducethenotionof an interpolat-ing polyhedron,and describea usercontrol methodologybasedon a Bezier curve paradigm.DeCarloand Gallier14
demonstratethat it is possible(with significant effort) tomorphpolygonalmodelsof differinggenus.
Hughes15 demonstratesthatvolumescanbe usedto cre-atea morphbetweenobjectsof differentgenusby utilizingFourier transforms.He et al.16 proposea similar approachusingwaveletsto controlthemorph.Lerioset al.17 describea morphingmethodwhich is a 3D extensionof Beier andNeely’s18 2D (image)morphingtechnique.PayneandToga6
describea methodfor changingonevolumetricmodelintoanotherby interpolatingthe distancefields generatedfromthe two volumes.Cohen-Oret al.8 improve upon this ap-proachby includingatwo-partwarpingstepthatcalculatesarigid transformationandanelasticwarpingbaseduponuser-suppliedanchorpoints.
Our volume-basedmorphing techniquesharesmany ofthe advantagesof previous volume-basedmethods.It caneasilymorphobjectsof differentgenus.It is not burdenedwith the difficult vertex/edge/facebook-keepingof surfacemethods,and level set surfacescannotpassthrougheachother. Additionally, our methodprovides a novel blendingmechanismthat will not producethe ghostingor sponta-neousgenerationof new objectswhich is possiblewhenin-terpolatingvoxel intensityor distancevalues.Our methoddoesnot requireuserinput to producea reasonablemorph,but can easily incorporatepreviously publishedwarpingtechniquesto provide a wide rangeof animatorcontrol.Fi-
c
TheEurographicsAssociationandBlackwellPublishers2001.

Breen,Mauch, Whitaker andMao / 3D MetamorphosisBetweenDifferentTypesof GeometricModels
nally, becausewe calculatethe distancetransformto sub-voxel accuracy and effectively track a deforming surfacewithin voxels, our resultsdo not producethe aliasingarti-factscommonlyfound in other distance-based,volumetricapproaches.
3. Level SetMethods
Level setmethods19 20 areusedin many componentsof ourmorphingapproach.Thefundamentalsof level setmethodsaredescribedhereto provide thenecessarybackgroundforlatersections.
A level set modelspecifiesa surfaceas a level setof ascalarvolumetricfunction,φ : U IR, whereU IR3 is therangeof thesurfacemodel.Thus,asurfaceS is
S s φ s k (1)
andthechoiceof theisovalue,k, is arbitrary. In otherwords,Sis thesetof pointss in IR3 thatcomposesthekth isosurfaceof φ. The embeddingφ canbe specifiedasa regular sam-pling on a rectilineargrid. Thesurfacesmaypropagatewith(time-varying)curvature-dependentspeeds.Level setmeth-odsprovidethemathematicalandnumericalmechanismsforcomputingsurfacedeformationsasisovaluesof φ by solvingapartialdifferentialequationonthe3D grid (U). Thatis, thelevel set formulation provides a set of numericalmethodsthat describeshow to manipulatethe greyscalevaluesin avolume,so that the isosurfacesof φ move in a prescribedmanner. SeeFigure2.
Figure 2: Level set modelsrepresentcurvesand surfacesimplicitly usinggreyscaleimages.For examplean ellipseisrepresentedasthelevel setof an image (left). To change theshapeof the ellipsewe modify the greyscalevaluesof theimage bysolvinga PDE(right).
There are two different approachesto defining a de-formablesurfacefrom a level setof a volumetric functionasdescribedin Equation1. Eitheronecanthink of φ s asastatic functionandchangethe isovaluek t or alternatively
fix k andlet thevolumetricfunctiondynamicallychangeintime, i.e. φ s t . Thus,we canmathematicallyexpressthestaticanddynamicmodelrespectively as
φ s k t (2a)
φ s t k (2b)
To transformthesedefinitionsinto partialdifferentialequa-tions that caneasilybe solved by standardnumericaltech-niques,wedifferentiatebothsidesof Equation2 with respectto time t, andapplythechainrule:
φ s dsdt dk t
dt(3a)
∂φ s t ∂t
φ s t dsdt 0 (3b)
ThestaticEquation3ais oftenreferredto asthe“Eikonal”equationanddefinesaboundaryvalueproblemfor thetime-independentvolumetricfunctionφ. Equation3acanbetrans-formedinto φ dk t
dt(4)
by assumingthatds dt is in thedirectionof thesurfacenor-mal N, andusingthe fact that
φ φ N andN N 1.
This static level set equationcan be solved using a “FastMarchingMethod”.21 22 However Equation2a hasits lim-itations.Sinceφ is asingle-valuedfunction,isosurfacescan-not self intersectover time, i.e. shapesdefinedin the staticmodelarestrictly expandingor contractingover time.How-ever, thedynamiclevel setapproachof Equation3b is muchmore flexible. Equation3b is sometimesreferredto as a“Hamilton-Jacobi-type”equationanddefinesaninitial valueproblemfor thetime-dependentφ.
The dynamiclevel setapproachmay be summarizedasthe following. Let ds dt be the movementof a point on asurfaceasit deforms,suchthatit canbeexpressedin termsof the positionof s U andthe geometryof the surfaceatthatpoint, which is, in turn, a differentialexpressionof theimplicit function,φ. Thisgivesapartialdifferentialequation(PDE)on φ: s s t
∂φ∂t φ ds
dt φ F s Dφ D2φ !!!"# (5)
whereF is a user-defined“speed”termwhichdependson asetof order-n derivativesof φ, Dnφ, evaluatedats, aswell asotherfunctionsof s.
Level setmodelshaveanumberof practicalandtheoreti-caladvantagesover conventionalsurfacemodels,especiallyin the context of deformationand segmentation.Level setmodelsaretopologicallyflexible; they easilyrepresentcom-plicatedsurfaceshapesthat can, form holes,split to formmultiple objects,or mergewith otherobjectsto form a sin-glestructure.Thesemodelscanincorporatemany (millions)of degreesof freedom,andthereforethey canaccommodatecomplex shapes.Indeed,theshapesformedby thelevel setsof φ are restrictedonly by the resolutionof the sampling.
c
TheEurographicsAssociationandBlackwellPublishers2001.

Breen,Mauch, Whitaker andMao/ 3D MetamorphosisBetweenDifferentTypesof GeometricModels
Thus,thereis no needto reparameterizethemodelasit un-dergoessignificantchangesin shape.
4. GeneratingDistanceVolumes
Within our level set morphingframework, sourceand tar-get objectsaredefinedasdistancevolumes.Our ability toconvert a numberof geometricmodeltypesinto this repre-sentationis centralto our morphingapproach.This sectionsdescribesthealgorithmsusedto convert polygonalmodels,CSGmodelsandMRI/CT scansinto distancevolumes.
4.1. ScanConverting PolygonalModels
We have developeda methodfor calculatinga distancevol-umefor a 3D closed,orientablepolygonalmeshcomposedof triangular faces,edges,vertices,and normalspointingoutwards.Thealgorithmcomputestheclosestpoint on andshortestsigneddistanceto themeshby solvingtheEikonalequationby the methodof characteristics.The methodofcharacteristicsis implementedefficiently with the aid ofcomputationalgeometryand polyhedronscan conversionproducinganalgorithmwith computationalcomplexity thatis linearin thenumberof faces,edgesandvertices.
Shortest distance can be shown to be the entropy-satisfying solution or vanishing viscosity solution of anEikonal equation(Equation4). Considera surface S thatmovesin a directionnormalto itself with speedf . Let φ x be the arrival time of the surfaceat the point x. φ hasmagnitude1 f . On thesurfaceS, φ is zero.Thusthearrivaltime is thesolutionof φ $ 1
f φ %% S 0 (6)
If the speedis unity, then the arrival time is the distancefrom thesurface.Thedistancefrom thesurfacesatisfiestheEikonalequation, φ 1 φ %% S 0 (7)
Thesolutionis C0.
Let ξ betheclosestpointonamanifoldto thepointx. Thedistanceto themanifoldis x ξ . x andξ aretheendpointsof theline segmentthat is a characteristicof thesolutionofEquation7. If themanifoldis smooththentheline connect-ing x to ξ is orthogonalto the manifold. If the manifold isnot smoothat ξ thenthe line lies “between”thenormalsofthesmoothpartsof themanifoldsurroundingξ.
Ourmethodof characteristicsfor solvingtheaboveequa-tion for a polygonalsurfacecanbe summarizedasthe fol-lowing. A Voronoidiagramis built for the faces,edgesandverticesof the mesh,with eachVoronoi cell definedby apolyhedron.Scanconversion is then utilized to determinewhichvoxelsof thedistancevolumelie in eachVoronoicell.By definition the face,edgeor vertex associatedwith theVoronoicell is theclosestelementon themeshto thevoxels
in thecell. Theclosestpoint/shortestdistanceto theelementis thencalculatedfor eachvoxel.
Supposethattheclosestpoint ξ to a grid pointx lies on atriangularface.The vectorfrom ξ to x is orthogonalto theface.Thustheclosestpointsto a givenfacemustlie withinatriangularprismdefinedby theedgesandnormalvectoroftheface.Facesproduceprismsof bothpositiveandnegativedistancedependingontheir relationshipto theface’snormalvector. Thesignof thedistancevaluein theprismin thedi-rectionof the normal(outsidethe mesh)is negative andispositive oppositethenormal(insidethemesh).A 2D exam-ple is presentedin Figure3. In two dimensionstheVoronoicellsaredefinedasstripswith negativeandpositivedistance.
Considera grid point x whoseclosestpoint ξ is on anedge.Eachedgein themeshissharedby twofaces.Theclos-estpointsto anedgemustlie in awedgedefinedby theedgeandthe normalsof the two adjacentfaces.We defineonlyoneVoronoicell for eachedgein thedirectionwherethean-gle betweenthe facesis greaterthanπ. Finally, consideragrid point x whoseclosestpoint ξ is on a vertex. Eachver-tex in themeshis sharedby threeor morefaces.Theclosestpointsto a vertex mustlie in a facetedconedefinedby thenormalsto the adjacentfaces.Similar to the edgeVoronoicells, we only defineonepolyhedronfor eachvertex. Theconewill pointoutwardsandcontainnegativedistanceif thesurfaceis convex at thevertex. Theconewill point inwardsandcontainpositive distanceif thesurfaceis concave at thevertex. Figure4 maybethoughtof a 2D cross-sectionof anedgeor a vertex Voronoi cell anddemonstratesthe condi-tionsfor definingonepositive or negative polyhedron.Fig-ure5a shows a Voronoicell (polyhedron)for a singleedge.Figure5b shows all of the vertex polyhedraof an icosahe-dron.
Oncethe Voronoi diagramis constructed,the polyhedraassociatedwith eachcell is scanconvertedin orderto asso-ciatetheclosestface,edgeor vertex with eachvoxel for theshortestdistancecalculation.Eachpolyhedronis intersectedwith theplanesthatcoincidewith thegrid rowsto formpoly-gons.This reducestheproblemto polygonscanconversion.SeeFigure6. For eachgrid row that intersectsthe result-ing polygonwefind theleft andright intersectionpointsandmarkeachgrid point in betweenasbeinginsidethepolygon.ThepolyhedrathatdefinetheVoronoicellsmustbeenlargedslightly to make surethatgrid pointsarenot missedduetofinite precisionarithmetic.Therefore,somegrid pointsmaybescanconvertedmorethanonce.In this case,thesmallerdistanceandthusthecloserpoint is chosen.
4.2. ScanConverting CSG Models
We employ a 3D scanconversiontechniquethatproducesadistancevolumefrom a CSGmodelconsistingof superel-lipsoidsandcalculatesdistanceto subvoxel accuracy.23 Thedistancevolumeis generatedin a two stepprocess.Thefirst
c
TheEurographicsAssociationandBlackwellPublishers2001.

Breen,Mauch, Whitaker andMao / 3D MetamorphosisBetweenDifferentTypesof GeometricModels
ξ
x
Figure 3: Stripscontainingpointswith negative(left) andpositive(right) distanceto edges.
x
ξ
Figure4: Wedgescontainingpointswith negative(left) andpositive(right) distanceto vertices.
(a) (b)
Figure5: (a)Thepolyhedronfor a singleedge. (b) Thepoly-hedra for thevertices.
Figure 6: Scanconversion of a polygonin 2D. Slicing apolyhedron to formpolygons.
stepcalculatesthe shortestdistanceto the CSGmodelat asetof pointswithin anarrow bandaroundtheevaluatedsur-
face.Additionally, a secondsetof points, labeledthe zeroset,which lieson theCSGmodel’s surfacearecomputed.Apoint in thezerosetis associatedwith eachpoint in thenar-row band.Oncethenarrow bandandzerosetarecalculatedafastmarchingmethodis employedto propagatetheshortestdistanceandclosestpoint informationout to the remainingvoxelsin thevolume.
Theinitial narrow bandcalculationsarealsoperformedina two stepprocess,calledthe calculate-and-combinestage.The first stepinvolvescalculatingthe closestpoint to eachsuperellipsoidincludedin the model.This is accomplishedby finding thevaluesof η andω which minimizetheequa-tion for the squareddistancebetweenan arbitrarypoint Panda parameterizedpoint on the surfaceof the superellip-soid,
d2 η ω &' a1cosε1 η cosε2 ω Px 2 a2cosε1 η sinε2 ω Py 2 a3sinε1 η Pz 2 (8)
whereη andω arethe longitudinalandlatitudinalparame-tersof the surface,a1, a2, a3 arethe scalingfactorsin thex, y, andz directions,ε1 andε2 definetheshapein thelon-gitudinal and latitudinal directions.The secondstepof thenarrow bandcalculationcombinesthe closestpoint calcu-lationsfor all of the superellipsoidsto producethe closestpoint to the evaluatedCSG model.The combinationrulesutilized at eachnon-leafnodeof the CSGmodelgrapharesummarizedin Tables1, 2 and3. Thesecombinationrulesdo not alwaysproducevalid results.The computedclosestpoint is thentestedwith theConstructive Cubesalgorithm24
to determineif it actuallyliesontheevaluatedsurfaceof theCSGmodel.If thetestreturnsavalueof 1 ( ε (ε accountsforround-off error)thecomputedpoint is valid andis retained.If it doesnot, it is discardedandis not includedin thezeroset.
Becausethecalculate-and-combinestageproducesaccu-rateresultsonly nearthesurfaceof theevaluatedmodelandis very expensive to calculate,anothermethodis neededtocalculatethe closestpoint and shortestdistanceat voxelsaway from the surface.We thereforeemploy a novel fastmarchingmethodto solve the Eikonal equation,Equation7. This methodcalculatestheclosestpoint information,andthustheshortestdistance,at theremaininggrid pointsof thedistancevolume.Themethodpropagatesthelocationof theclosestpoint in the zeroset to thosegrid points.This pro-videsanalgorithmwhoseaccuracy dependson a discretiza-tion of theoriginalsurfaceandis independentof thevolumegrid spacing,thusproviding user-specified,sub-voxel accu-racy. In onestepof our fastmarchingmethod:
1. Thepoint gp with thesmallestdistanceis removedfromthenarrow bandandits valueis frozen.
2. Points are addedto the narrow band to maintain unitthickness.
3. Theclosestpointsof gp’sneighborswith largerdistances
c
TheEurographicsAssociationandBlackwellPublishers2001.

Breen,Mauch, Whitaker andMao/ 3D MetamorphosisBetweenDifferentTypesof GeometricModels
BA ) B IN OUT ON
IN MIN A AA OUT B MIN B
ON B A A
Table1: Unioncombinationrules.
BA * B IN OUT ON
IN MAX B BA OUT A MAX A
ON A B A
Table2: Intersectioncombinationrules.
BA - B IN OUT ON
IN -B MAX(A,-B) BA OUT MAX(A,-B) A A
ON -B A A
Table3: Differencecombinationrules.
thangp arerecomputedusingtheclosestpoint informa-tion from gp.
Thefinal stepmaybefurtherdetailed.For eachneighborofgp with ashortestdistancegreaterthangp’s
1. Calculatethe distancebetweenthe neighborand eachpoint in thezerosetwithin a user-definedregion aroundgp’s closestpoint.
2. If the calculatedshortestdistanceis smaller than theneighbor’s original distancevalue,updatetheneighbor’sclosestpoint to thecurrentpoint in thezeroset,andcal-culateanew shortestdistance.
A moredetaileddescriptionof our3D CSGscanconversiontechniquemaybefoundin Breenetal.23
4.3. SegmentingMRI Scans
Theprevious two scanconversionmethodsproducea volu-metricrepresentation(adistancevolume)of asingle,simple,closedobject.Weutilize level setmethodsonceagainto ex-tracta single,simple,closedobjectfrom a noisyMRI scanof ahumanhead25. Ourmethodeffectively segmentsthede-siredsurfacefrom theMRI volume,while applyingsmooth-ing in orderto producea satisfactoryresult.Level setseg-mentationrelieson a surface-fittingstrategy, that is abletodealwith bothsmall-scalenoiseandsmootherintensityfluc-tuationsin volumedata.Thelevel setsegmentationmethod,which is well documentedin the literature26 27 28, createsanew volumefrom the input databy solving an initial valuepartial differentialequation(Equation5) with user-definedfeature-extractingterms.
Our level set segmentationapproachconsistsof defin-ing a setof suitablepre-processingtechniquesfor initializa-tion and selecting/tuningdifferent feature-extracting termsin the level setequationto producea surfacedeformation.Within our segmentationframework a varietyof operationsareavailable in eachstage.A usermust “mix-and-match”theseoperationsin orderto producethe desiredresult.Weonly describethoseoperationsneededto producethemodelof thehumanhead.Oncethefinal surfaceis extractedfromtheMRI scan,Sethian’s FastMarchingMethod22 is utilizedto solve the Eikonal equation(Equation7) to producetherequireddistancevolume.
4.3.1. Initialization
Becauselevel setmodelsmove usinggradientdescent,theyseeklocal solutions, and thereforethe resultsare stronglydependenton the initialization, i.e., the startingpositionofthe surface.Thus, one controls the natureof the solutionby specifyingan initial model from which the surfacede-formationprocessproceeds.Weareableto computationallyconstructreasonableinitial estimatesdirectly from theinputdataby combiningavarietyof techniques.
Linear filtering: We canfilter the input datawith a low-passGaussianfilter to blur the dataand therebyreducenoise.This tendsto distort shapes,but the initializationneedonly beapproximate.
Topological/logicaloperations: This is the set of basicvoxel operationsthattakesinto accountpositionandcon-nectivity. It includesunionsor intersectionsof voxel setsto createbetter initializations. Theselogical operationscanalsoincorporateuser-definedprimitives.Topologicaloperationsconsistof connected-componentanalyses(e.g.floodfill) to remove smallpiecesor holesfrom objects.
Mor phological filtering: This includes binary andgreyscale morphologicaloperatorson the initial voxelset. For the results in the paper we implement open-ings andclosingsusingmorphological propagators.29 30
This involves defining offset surfacesof φ by expand-ing/contractingasurfaceaccordingto thefollowing PDE,
∂φ∂t+(, φ (9)
up to a certaintime t. The valueof t controlsthe offsetdistancefrom theoriginal surfaceof φ t 0 . A dilationof sizeα, Dα, correspondsto the solutionof Equation9at t α usingthepositive sign,andlikewiseerosion,Eα,usesthenegativesign.A morphologicalopeningoperatorOα is producedby first applyinganerosionfollowedby adilation of φ, i.e. Oαφ Dα - Eαφ, which removessmallpiecesor thin appendages.A closingis definedasCαφ Eα - Dαφ, andclosessmallgapsor holeswithin objects.
4.3.2. SurfaceDeformation
Theinitializationshouldpositionthemodelnearthedesiredsolutionwhile retainingcertainpropertiessuchassmooth-
c
TheEurographicsAssociationandBlackwellPublishers2001.

Breen,Mauch, Whitaker andMao / 3D MetamorphosisBetweenDifferentTypesof GeometricModels
ness,connectivity, etc. Given a rough initial estimate,thesurfacedeformationprocessmoves the surfacemodel to-ward specificfeaturesin the data.One must choosethosepropertiesof the input datato which the modelwill be at-tractedand what role the shapeof the model will have inthedeformationprocess.Typically, thedeformationprocesscombinesadatatermwith asmoothingterm,whichpreventsthesolutionfrom fitting too closelyto noise-corrupteddata.Thereareavarietyof surface-motiontermsthatcanbeusedin successionor simultaneouslyin a linear combinationtoform F x in Equation5.
Curvature: This is thesmoothingterm.For thework pre-sentedherewe usethe meancurvatureof the isosurfaceH to form a vectorin thedirectionof thesurfacenormaln givenby
F x Hn . φ φ 0/ φ φ (10)
The meancurvature is also the normal variation of thesurfacearea(i.e., minimal surfacearea).Therearea va-riety of optionsfor second-ordersmoothingterms,andthe questionof efficient, effective higher-order smooth-ing termsis the subjectof on-goingresearch.20 For thework in this paper, we combinemeancurvaturewith thefollowing term,weightingit by a factorβ.
Isosurface: Surfacemodelscanalsoexpandor contracttoconformto isosurfacesin the input data.To a first orderapproximation,thedistancefrom a point x U to thek-level surfaceof I is given by I x k12 I . If we letg α bea fuzzy threshold,e.g.,g α 3 α 54 1
α2, then
F x φ φ g . I x k I / (11)
causesthesurfacesof φ to expandor contractto matchthekth isosurfaceof I .
The first imagein Figure 10 shows the result of fittinga level setmodelto the MRI headdatashown in Figure1.The initial modelis producedby smoothingthedata,usinga flood fill on theexterior to remove interior structures,andtreatingthe model with a closing,C5 6 0. The final result isproducedby fitting a level setmodelto anisosurfaceof theMRI datawith thecurvaturetermto ensuresmoothness.Asstatedearlier, Sethian’s FastMarchingMethod is thenuti-lized to produceadistancevolume.
5. Level Set3D Metamorphosis
Morphingstrategiesmaybebuilt uponany numberof under-lying principles.For instance,surfacemetamorphosiscouldconsistof asequenceof timeslicesfrom afour-dimensionalmanifold which optimizessomespace-timecriteria.10 Ourstrategy for objectmetamorphosisis basedon yet anotherprinciple:shapemetamorphosisis theprocessby whichoneobjectseeksto resembleanother.31 32 Thisphilosophyraises
two questions.First, what is the metric by which we canquantify the similarity of two objects?Second,what is theprocessby whichoneobjectseeksto optimizethatmetric?
5.1. Similarity Metric
In orderto createa verygeneralalgorithmfor metamorpho-sis,we work with a very generalnotion of a surface.Con-sideranopensetΩA IR3, whichis thesourceobject,andatargetobjectΩB IR3. Thesource,ΩA, is enclosedby asur-face7 A ∂ΩA, andlikewise 7 B ∂ΩB. Werequirethattheobjectsbe compactandlie in somefinite domainU IR3.Notice that we do not requireany specificconnectivity ortopology, which meansthat eachobjectcould consistof asetof disconnectedpieces(eachwith any numberof holes)all sitting in U .
We proposea very simple metric for comparingtwoshapesthat maximizesthe volume sharedby the interiorsof thetwo objects.Firstdefineaninside-outsidefunctionforthetarget,γB : IR3 IR for ΩB, suchthat
γB x 8 0 9 x :7 BγB x <; 0 9 x ΩBγB x <= 0 otherwise (12)
The inside-outsidefunction γB canbe usedto quantify theextentto which anintermediateobjectΩt overlapswith thetarget,ΩB, with thevolumeintegral>
ΩB ?Ωt +@ Ωt
γB x dx (13)
Notice,this integralachievesits maximum,
Ωm argmaxΩt
. @Ωt
γB x dx/ (14)
whenΩm ΩB, becausein thatcasetheintegral includesallof thepositive partsof γB andnoneof thenegativeparts.
We cancomputethefirst variationof this metricwith re-spectto Ωt by notingthatincrementalchangesin theobjectshapecanbeexpressedin termsof thesurfacethatenclosesit: @
Ωt A dΩt
γB x dx @Ωt
γB x dx
(15)
@1Bt
γB x ε x N x dx whereN : 7 t S3 is theunit surfacenormal.Differentiatingwith respectto ε gives the first variation33 with respecttosurfaceposition:
d> γB x N x# (16)
Usingthefirst variationfrom Equation16 anda hill climb-ing strategy, we obtainthesurfacemotion,definedfor eachsurfacepoint, thatminimizesoursimilarity metric:
dsdt γB s t C N s t CD9 s t EF7 t (17)
c
TheEurographicsAssociationandBlackwellPublishers2001.

Breen,Mauch, Whitaker andMao/ 3D MetamorphosisBetweenDifferentTypesof GeometricModels
Thisequationstatesthateachpointon thesurface7 t movesat eachtime stepdt in the directionof the surfacenormalN s t C with astepsizeproportionalto thevalueof thevalueof theinside-outsidefunctionγB s t C at thepoint location.
5.2. MetamorphosisStrategy
This formulationsuggestsastrategy for shapemetamorpho-sis: constructa family of objectsΩt (with a correspond-ing 7 t), with Ωt t G 0 ΩA that evolve accordingto a hill-climbing strategy, andmaximize
>. If properlyinitialized
(i.e., all of the componentsof ΩB have someoverlapwithΩA) then the deformationwill seekthe global maximum,which is thetargetΩB.
The intermediateshapescontained in Ωt depend,ofcourse,onthechoiceof γB. γB shouldrewardshapesthataresimilar to thetargetbut offsetby somesmalldistance.Thatis γB shouldcarryinformationabouttheshapeof thesurfaceinto 3D sothatshapestendto “look like” thetargetastheyget nearer. This suggeststhat a naturalchoiceof γB is thesigneddistancetransformof the targetsurface 7 B or somemonotonicfunction thereof.Thus, if we let DB : U IRbethesigneddistancetransform,γB x3 f DB x H , wheref 0D 0 and f IJ aK; 0.By tuning f onecancontrolthewaythemetamorphosisbehaveswhenintermediatesurfacesarefar from thetarget.If f a a, then 7 t contractsor expandswith a magnitudethatdependson thesigneddistanceto thetarget.
In order to produceour morphingdeformationequationwe “plug” ds t H dt from Equation17 into Equation3b,yielding
∂φ s∂t φ γB s t H2 (18)
where we have usedthe fact that surface normal is unitlength,i.e. N N 1. Notice,we have not chosena particu-lar k, andthereforethis analysisappliesto every level setofφ. Thuswe aredescribingthedeformationof anembeddedfamily of surfacemodelseachof whichevolvesaccordingtothesameequation:
∂φ x∂tL φ xM γB x# (19)
Theparticularlevel setof interestis theonethatwechoose,by constructionof theinitial conditions,suchthatφ x 0Kk 9 x :7 A.
The completedeformationstrategy is as follows. First,initialize a volumesothat thekth level setis approximatelyalignedwith 7 B. For all of our work we will usethe zero-setasthe level-setmodelandusethedistancevolumesde-scribedin the previous sectionsfor initialization. We usethis initial modelto solve theinitial valueproblemgivenbyEquation19, usingthe distancevolumeof the targetastheγB. Wesolvethisequationusingfinite forwarddifferences.20
ΩB
Ωto
Ωti
ExpansionContraction
Ωt ∩ SB γB = 0
Figure 7: Level setmetamorphosis:onepart of the sourcemodelcontractsto annihilationwhiletheotherexpandsuntilit is equalto thetarget.
Whenthemodelis sufficiently closeto thetarget (a thresh-old ontheRMSdistanceto thetarget),theprocessstopsandthemetamorphosisis complete.
5.3. Controlling the Mor ph
In orderfor our active level-setmodel to deformfrom onesurfaceinto anotherthesourceandtargetobjectsmustover-lap. Theobjectsmaybe interactively positionedin ordertoproduceaparticularmodelalignment.Thesourceobjectwillshrink in thoseareaswhereit is outsidethe target object,andwill expandin thoseareasinside the target model,asshown in Figure 7. Thus, the usercontrols the morph bydefiningthe regionsof overlapbetweenthe sourceandthetarget.This is accomplishedby applyinga coordinatetrans-formationwhich mapsthevoxel locationsof thesourceob-jectinto new locationsin thetargetobject’sdistancevolume.Thetransformationis givenby
xI T x α # (20)
where 0 N α N 1 parameterizesa continuousfamily oftransformationsthat begins with identity, i.e. x T x 0 ,and smoothlybecomesthe user-definedtransformationatT x 1 . Theparameterizationis utilized duringthepolygo-nizationstage.Additional detailsaboutcontrollingtheevo-lution of themorphmaybefoundin BreenandWhitaker32.
5.4. Level-SetDeformation
Oncethe overlapof the sourceandtarget objectshasbeendefined,the level-setdeformationprocess,as describedinSection5.2, is initiated. The processproducesa sequenceof volumedatasetsthatrepresentsthemorphingobject.Theuserdefineshow oftenthelevel-setvolumeis writtento diskduringthedeformationprocess.
c
TheEurographicsAssociationandBlackwellPublishers2001.

Breen,Mauch, Whitaker andMao / 3D MetamorphosisBetweenDifferentTypesof GeometricModels
5.5. Polygonizationand Rendering.
In order to view the morph, we extract a polygonal iso-surface(with the Marching Cubesalgorithm34) from eachvolumeproducedby the level-setdeformationprocess.Thepolygonsarerenderedto producea seriesof images,whicharethencombinedto produceananimation.Oncethelevel-setmodelshave beenconvertedinto polygons,any numberof conventionalrenderingandanimationtechniquesmaybeusedto shadeand view the morphingobject. If a shape-changingtransformationT x α (e.g.,a scaling,or a gen-eralizedwarp)hasbeenutilizedduringthedeformationpro-cess,thetransformationmustbeinterpolatedandincremen-tally appliedto theresultingpolygonalmodelsgeneratedateachtime step.Applying sucha transformationimpliesthatthemorphis a combinationof theuser-definedtransforma-tion andthelevel-setdeformation.
6. Results
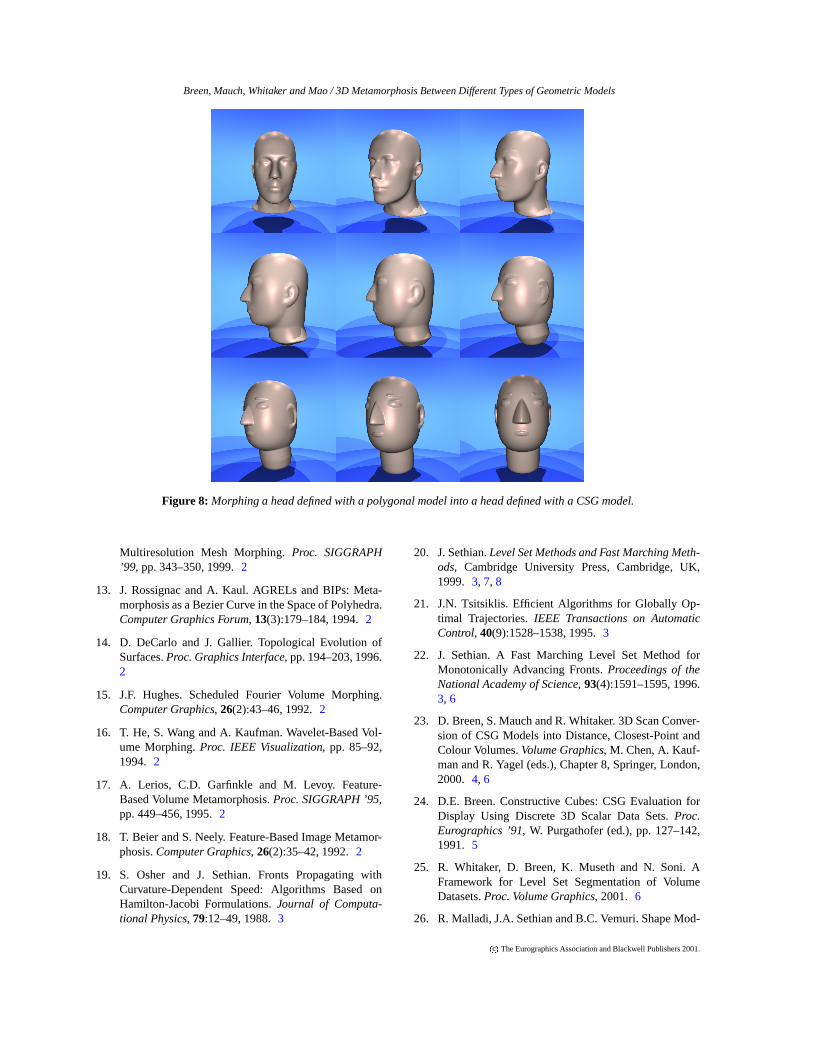
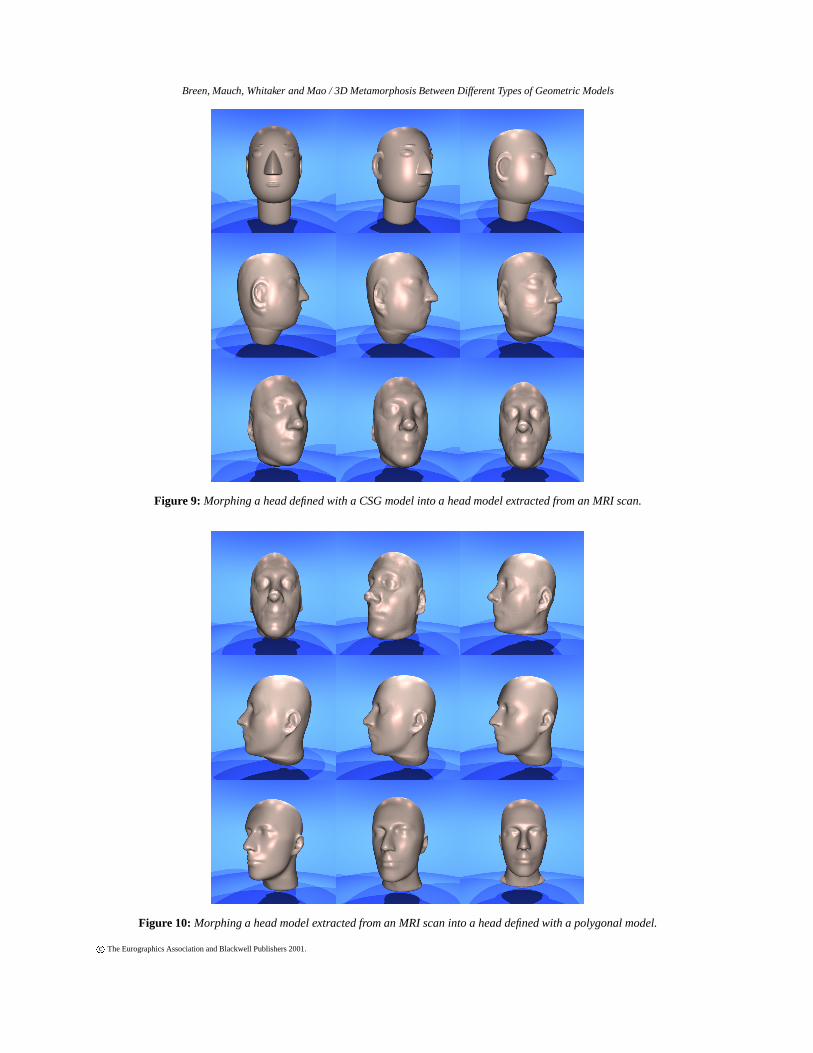
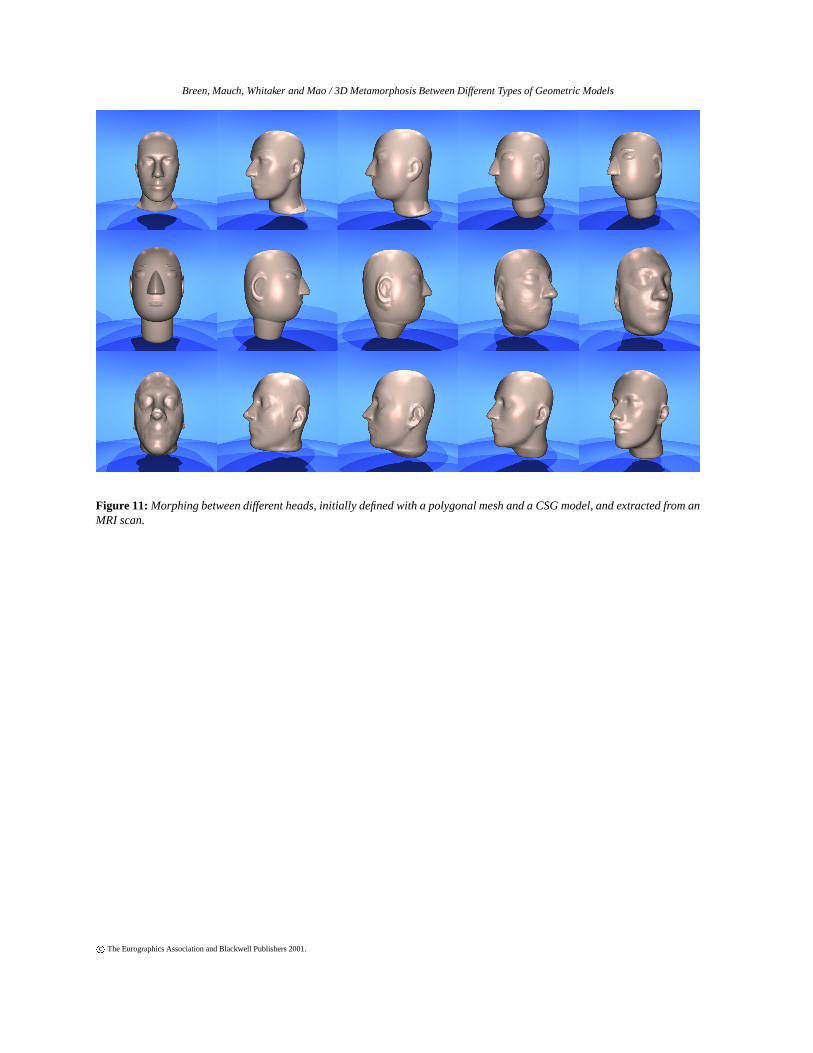
Figures8, 9, 10 and 11 presentseveral framesof an an-imation createdwith our morphingtechnique.They showa head originally defined with a polygonal model firsttransforminginto a headdefined by a CSG model, fol-lowed by a transformationinto a head model extractedfrom an MRI scan.The final sequencemorphsthe MRIheadback into the headdefinedby the polygonalmodel.Quicktime movies of the animation can be found athttp://www.gg.caltech.edu/O david/eg_morph.html.Compu-tation times for the various componentsof our approachrangefrom a few minutes(polygonalmodel scanconver-sionandlevel setsegmentation)to tensof minutes(level setmorphing)to several hours(CSGscanconversion,polygo-nizationandrendering)onanSGI R10000Onyx2.
7. Conclusion
We have presenteda powerful morphingtechniquebasedon level setmethods,that canbe combinedwith a varietyof scanconversion/modelprocessingtechniques.Bringingthesetechniquestogethercreatesa generalmorphingap-proachthat allows a user to morph a numberof geomet-ric model typesin a singleanimation.We have developedtechniquesfor converting several typesof geometricmod-els (polygonalmeshes,CSG modelsand MRI scans)intodistancevolumes,thevolumetricrepresentationrequiredbyour level setmorphingapproach.Thecombinationof thesetwo capabilitiesallowsauserto createamorphingsequenceregardlessof themodeltypeof thesourceandtargetobjects,freeinghim/her to usewhatever model type is appropriatefor aparticularanimation.
Acknowledgements
We would like to thank Dr. Alan Barr for his supportofthis project, Dr. Ken Museth for his contributions to the
segmentationframework, and Ms. KhrysaundtKoenig forher lighting and shadingsuggestionsin our morphingse-quence.Thiswork wassupportedby NationalScienceFoun-dationgrants#ASC-89-20219and#ACI-9982273,OfficeofNaval ResearchVolume Visualizationgrant #N00014-97-0227,theNationalInstituteonDrugAbuse,theNationalIn-stituteof MentalHealthandtheNSF, aspartof theHumanBrain Project,the National Library of Medicine “Insight”Project#N01-LM-0-3503,andtheCaltechSURFProgram.The polygonalmodelwasprovided by HughuesHoppeofMicrosoft Research,andtheMRI scanwasprovidedby theUniversityof Utah’sSCI Institute.
References
1. D. Cohenand A. Kaufman. Scan-Conversion Algo-rithmsfor LinearandQuadraticObjects.VolumeVisu-alization, A. Kaufman(ed.),pp.280–301,1990. 2
2. M.W. Jones.TheProductionof VolumeDatafrom Tri-angularMeshesUsingVoxelisation.ComputerGraph-icsForum, 15(5):311–318,1996. 2
3. S. WangandA. Kaufman.Volume-Sampled3D Mod-eling. IEEE Computer Graphics and Applications,14(5):26–32,1994. 2
4. M. SramekandA. Kaufman.Alias-FreeVoxelizationofGeometricObjects.IEEETransactionsonVisualizationandComputerGraphics, 5(3):251–267,1999. 2
5. S.FangandR.Srinivasan.Volumetric-CSG–A Model-BasedVolume VisualizationApproach.Proc. 6th Int.Conferencein Central Europeon ComputerGraphicsandVisualization, 1998. 2
6. B. PayneandA. Toga.DistanceField ManipulationofSurfaceModels.IEEE ComputerGraphicsandAppli-cations, 12(1):65–71,1992. 2
7. G. Borgefors.DistanceTransformationsin Digital Im-ages.ComputerVision, Graphics,and Image Process-ing, 34:344–371,1986. 2
8. D. Cohen-Or, D. Levin and A. Solomivici. Three-Dimensional Distance Field Metamorphosis.ACMTransactionsonGraphics, 17(2):116–141,1998. 2
9. E. GalinandS.Akkouche.Blob MetamorphosisBasedon Minkowski Sums. Computer Graphics Forum,15(3):143–153,1996. 2
10. G. Turk andJ.F. O’Brien. ShapeTransformationUsingVariationalImplicit Functions.Proc. SIGGRAPH’99,pp.335–342,1999. 2, 7
11. J.R.Kent,W.E. CarlsonandR.E.Parent.ShapeTrans-formationfor PolyhedralObjects.ComputerGraphics,26(2):47–54,1992. 2
12. A.W.F. Lee,D. Dobkin, W. SweldensandP. Schröder.
c
TheEurographicsAssociationandBlackwellPublishers2001.
Breen,Mauch, Whitaker andMao/ 3D MetamorphosisBetweenDifferentTypesof GeometricModels
Figure8: Morphinga headdefinedwith a polygonalmodelinto a headdefinedwith a CSGmodel.
Multiresolution Mesh Morphing. Proc. SIGGRAPH’99, pp.343–350,1999. 2
13. J. RossignacandA. Kaul. AGRELsandBIPs: Meta-morphosisasaBezierCurve in theSpaceof Polyhedra.ComputerGraphicsForum, 13(3):179–184,1994. 2
14. D. DeCarlo and J. Gallier. TopologicalEvolution ofSurfaces.Proc.GraphicsInterface, pp.194–203,1996.2
15. J.F. Hughes. ScheduledFourier Volume Morphing.ComputerGraphics, 26(2):43–46,1992. 2
16. T. He, S. WangandA. Kaufman.Wavelet-BasedVol-ume Morphing. Proc. IEEE Visualization, pp. 85–92,1994. 2
17. A. Lerios, C.D. Garfinkle and M. Levoy. Feature-BasedVolumeMetamorphosis.Proc.SIGGRAPH’95,pp.449–456,1995. 2
18. T. BeierandS.Neely. Feature-BasedImageMetamor-phosis.ComputerGraphics, 26(2):35–42,1992. 2
19. S. Osher and J. Sethian. Fronts PropagatingwithCurvature-DependentSpeed: Algorithms Based onHamilton-JacobiFormulations.Journal of Computa-tional Physics, 79:12–49,1988. 3
20. J.Sethian.LevelSetMethodsandFastMarchingMeth-ods, CambridgeUniversity Press,Cambridge,UK,1999. 3, 7, 8
21. J.N. Tsitsiklis. Efficient Algorithms for Globally Op-timal Trajectories.IEEE Transactionson AutomaticControl, 40(9):1528–1538,1995. 3
22. J. Sethian.A Fast Marching Level Set Method forMonotonically AdvancingFronts.Proceedingsof theNationalAcademyof Science, 93(4):1591–1595,1996.3, 6
23. D. Breen,S.MauchandR. Whitaker. 3D ScanConver-sion of CSGModels into Distance,Closest-PointandColourVolumes.VolumeGraphics, M. Chen,A. Kauf-manandR. Yagel(eds.),Chapter8, Springer, London,2000. 4, 6
24. D.E. Breen.Constructive Cubes:CSG EvaluationforDisplay Using Discrete 3D Scalar Data Sets.Proc.Eurographics’91, W. Purgathofer(ed.),pp. 127–142,1991. 5
25. R. Whitaker, D. Breen, K. Museth and N. Soni. AFramework for Level Set Segmentationof VolumeDatasets.Proc.VolumeGraphics, 2001. 6
26. R. Malladi, J.A.SethianandB.C.Vemuri.ShapeMod-
c
TheEurographicsAssociationandBlackwellPublishers2001.
Breen,Mauch, Whitaker andMao / 3D MetamorphosisBetweenDifferentTypesof GeometricModels
Figure9: Morphinga headdefinedwith a CSGmodelinto a headmodelextractedfroman MRI scan.
Figure10: Morphinga headmodelextractedfroman MRI scaninto a headdefinedwith a polygonalmodel.
c
TheEurographicsAssociationandBlackwellPublishers2001.
Breen,Mauch, Whitaker andMao/ 3D MetamorphosisBetweenDifferentTypesof GeometricModels
eling with Front Propagation:A Level SetApproach.IEEE Transactionson Pattern Analysisand MachineIntelligence, 17(2):158–175,1995. 6
27. M. Leventon, O. Faugeras, W. Grimson andW. Wells III. Level Set Based SegmentationwithIntensity and Curvature Priors. Proc. MathematicalMethods in Biomedical Image Analysis, pp. 4–11,2000. 6
28. L. Staib, X. Zeng, R. Schultzand J. Duncan.ShapeConstraintsin DeformableModels.Handbookof Med-ical Imaging, I. Bankman(ed.),Chapter9, AcademicPress,SanDiego,2000. 6
29. R. van den Boomgaardand A.W.M. Smeulders.TheMorphological Structureof Images,the DifferentialEquationsof MorphologicalScale-Space.IEEETrans-actionson PatternAnalysisandMachine Intelligence,16(11):1101–1113,1994. 6
30. P. Maragos.DifferentialMorphologyand ImagePro-cessing. IEEE Transactions on Image Processing,5(6):922–937,1996. 6
31. R. Whitaker and D. Breen.Level-SetModels for theDeformationof SolidObjects.Proc.3rd Int. Workshopon Implicit Surfaces, pp.19–35,1998. 7
32. D.E. BreenandR.T. Whitaker. A Level-SetApproachfor theMetamorphosisof SolidModels.IEEETransac-tions on Visualizationand ComputerGraphics, 2001.7, 8
33. C. Fox. Introductionto Calculusof Variations, DoverPublications,New York, 1987. 7
34. W.E. Lorensenand H.E. Cline. Marching Cubes:AHigh Resolution3D SurfaceConstructionAlgorithm.ComputerGraphics, 21(4):163–169,1987. 9
c
TheEurographicsAssociationandBlackwellPublishers2001.
Breen,Mauch, Whitaker andMao / 3D MetamorphosisBetweenDifferentTypesof GeometricModels
Figure11: Morphingbetweendifferentheads,initially definedwith a polygonalmeshanda CSGmodel,andextractedfromanMRI scan.
c
TheEurographicsAssociationandBlackwellPublishers2001.