8 introduction to ai robotics (mit press), copyright robin murphy 2000 chapter 8: multi-agents1...
TRANSCRIPT

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 1
8Chapter 8:
Multi-agents, HRI, & Affective Computing

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 2
8 Objectives• List and describe the dimensions of a multi-agent system:
heterogeneity, control regime, cooperation, and goals
• List and describe the axes for describing a MAS task (time, subject of action, movement, dependency)
• List and describe the axes for describing a MAS collective (composition, size, communications, reconfigurability)
• Given a description of an intended task, a collection of robots, and the permitted interactions between robots, design a multi-agent system and describe the system in terms of heterogeneity, control, cooperation, and goals.

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 3
8 Objectives (cont.)
• Compute the social entropy of a team.
• Be able to program a set of homogeneous reactive robots to accomplish a foraging task.
• Describe the use of social rules and internal motivation for emergent social behavior.
• Be able to diagram the steps of robots in a team using Mataric’s social rules
Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 4
8 Objectives (cont.)
• Given a layout of robots and tasks and a table such as Fig. 8.6 partially filled in, be able– Fill in the change in impatience and acquiescence
• Given a layout of robots and tasks and a table such as Fig. 8.6 with t0 through tn:– show the next two moves and corresponding changes to the
level of impatience and acquiescence of each task and the task list for robots in a team using ALLIANCE

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 5
8 The Study of Multiple Robots
DistributedArtificial
Intelligence
DistributedProblemSolving
Multi-Agent
Systems

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 6
8 The Study of Agency(after Stone and Veloso 2002)
DistributedArtificial
Intelligence
DistributedProblemSolving
Multi-Agent
Systems
How to solve problemsOr meet goals by
“divide and conquer”
Single computer:•How to decompose task?•How to synthesize solutions?
Divide among agents:•Who to subcontract to?•How do they cooperate?

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 7
8 4 Dimensions of a Multi-agent System
• Heterogeneity– Same (homogeneous) vs. different (heterogeneous)– Can be different on either software or hardware
• Control Regime– Centralized (Phantom Menance) vs. Distributed
• Cooperation– Active (acknowledge each other) vs. Non-active (cooperation
emerges, not explicit)– Communicating or non-communicating
• Goals– Single goal (same, explicit) vs. Individual
Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 8
8 The Ecological Niche of a Multi-Agent System
Remember….
• Single Robot– Task
– Environment
– Agent

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 9
8 The Ecological Niche of a Multi-Agent System
• Multi-agent system– Task
– Environment
– Individual Agent
– Collective
emphasis

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 10
8 MAS Ecological Niche: Task(after Balch 02)
• There are 4 axes of a MAS Task– Time– Subject of Action– Movement– Dependency

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 11
8 4 Categories of Time
1. Fixed time – ex. Collect as many cans in 10 minutes
2. Minimum time – ex. Visit all rooms as fast as possible (minimize the time)
3. Unlimited time – ex. Patrol the building
4. Synchronization required – ex. Push two buttons at same time

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 12
8 Class Question
• Recall the “Call a Conference” task on the Scientific Amercian Frontiers’ Robots Alive! In that task robot(s) had to find an empty conference room, then let professors know where and when the meeting was
• This task falls into what category of time?– Fixed
– Minimum
– Unlimited
– Synchronized

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 13
8 Class Question
• Consider the task of humanitarian demining– clearing a complex terrain of land mines- with robots.
• This task falls into what category of time?– Fixed
– Minimum
– Unlimited
– Synchronized

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 14
8 2 Categories of Subject of Action
Subject of Action:
– Object-based • robots place a single object- ex. soccer
– Robot-based • robots place themselves- ex. mapping

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 15
8 Soccer
U-freiberg

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 16
8 Collaborative Mapping

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 17
8 Class Question
• Recall the “Call a Conference” task on the Scientific Amercian Frontiers’ Robots Alive! In that task robot(s) had to find an empty conference room, then let professors know where and when the meeting was
• This task falls into what category of subject of action?– Object-based
– Robot-based

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 18
8 Class Question
• Consider the task of humanitarian demining– clearing a complex terrain of land mines- with robots.
• This task falls into what category of time?– Object-based
– Robot-based

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 19
8 4 Categories of Movement
1. Coverage – Spread out to cover as much as possible
2. Convergence – Robots meet from different start positions
3. Movement-to – Going to a single location
4. Movement-while – Formation control

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 20
8 Class Question
• Recall the “Call a Conference” task on the Scientific Amercian Frontiers’ Robots Alive! In that task robot(s) had to find an empty conference room, then let professors know where and when the meeting was
• This task falls into what category of subject of action?– Coverage
– Convergence
– Movement-to
– Movement-with

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 21
8 Class Question
• Consider the task of humanitarian demining– clearing a complex terrain of land mines- with robots.
• This task falls into what category of time?– Coverage
– Convergence
– Movement-to
– Movement-with

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 22
8 3 Categories of Dependency
1. Independent– Robots don’t have to work directly or be aware of
others
2. Dependent– Must work together for efficiency ex. Box pushing
3. Interdependent– Cyclic dependency ex. resupply

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 23
8 Box-Pushing

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 24
8 MAS Task Summary• Time
– Fixed time task (ex. Collect as many cans in 10 minutes)– Minimum time (ex. Visit all rooms as fast as possible)– Unlimited time (ex. Patrol the building)– Synchronization required (ex. Push two buttons at same time)
• Subject of Action– Object-based (e.g., robots place a single object- soccer)– Robot-based (e.g., robots place themselves- mapping)
• Movement– Coverage (ex. Spread out to cover as much as possible)– Convergence (ex. Robots meet from different start positions)– Movement-to (ex. Going to a single location)– Movement-while (ex. Formation control)
• Dependency– Independent (ex. Doesn’t require agents to know about others)– Dependent (ex. Task requires multiple agents)– Interdependent (ex. Agents depend on each other cyclically)

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 25
8 Class Question
• Consider the task of search and rescue, where multiple robots are to be used to search a collapsed building.
• Describe the task in terms of the 3 axes of a collective task– Time
– Subject of action
– Movement
– Dependency

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 26
8 Class Question
• Consider the task of forensic sampling, where robots are to enter the floor a building where a crime has been committed, and then photograph and scan the entire floor as accurately as possible.
• Describe the task in terms of the 3 axes of a collective task– Time
– Subject of action
– Movement
– Dependency

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 27
8 MAS Ecological Niche: Collective (after Dudek, Jenkin, and Milios 02)
There are 4 axes of a collective:– Composition– Size of the collective– Communication– Collective reconfigurability

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 28
8 2 Categories of Composition
• Composition– Homogeneous
– Heterogeneous

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 29
8 Case Studies• Georgia Tech 1994 AAAI
Mobile Robot Competition team
• Each robot hardware and software homogeneous
• Reactive behaviors– Wander-for-goal– Move-to-goal– Avoid– Avoid-other-robots– Grab-trash– Drop-trash
• Affordances– Orange=goal– Green=robot– Blue=trashcan
Dimensional score:HomogeneousDistributed controlActive cooperation (though minimal)Individual goal

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 30
8 Example of Heterogeneous Team• USF USAR team
• Robot had different hardware, software
• Currently teleoped navigation with autonomous reactive victim detection
• Single goal, active cooperation– Confirm a victim with
distributed sensors
– Open door, “spotting” for navigation in confined spaces
Dimensional score:HeterogeneousDistributed control (could be central.)Active cooperation Single goal

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 31
8 Social Entropy
• Way to measure heterogeneity of a collective
• (go to board-> 4 identical, 4 marsupial)

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 32
8 Example of Heterogeneous Team• USC UAV/UGV team
• Currently teleoped
• Single goal, active cooperation

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 33
8 4 Categories of Size
• Size of the collective– Alone– Pair– Limited
• n<<than size of task or environment
– Infinite • n>>than size of task or environment)

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 34
8 3 Categories of Reconfigurability
• Collective reconfigurability– Static
• The organization doesn’t change, no matter what
– Communicated• Coordinated rearrangement
• Ex. Ordered to change formation
– Dynamically• Changes arbitrarily (esp. due to failure)
• Ex. A robot fails

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 35
8 Box Pushing: Dynamic Reconfigurability

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 36
8 Ex. Dynamic Reconfigurability

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 37
8 Ex. Dynamic Reconfigurability

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 38
8 Physically Reconfigurable Robots

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 39
8 5 Categories of Communication
• Communication (1 robot causes an external change in world that can be observed by another robot)
• Can minimize interference

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 40
8 5 Categories
– Infinite• comms are free
– Motion • costs as much to communicate as it would to move
– ex. Box pushing (if other robot can feel the box, it’s comms)
– Low • comms costs more than moving from one location to
another
– Zero• no communication between agents
– Topology• Broadcast, address, tree, graph
Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 41
8 What Do Robots Say to Each Other?
• How do they “talk”?– Implicit: signaling, postures, smell
– Explicit: language
• Who does the talking?– “the boss” -Centralized control
– Everybody - Distributed control

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 42
8 What do Robots Say? (after Jung and Zelinsky 02)
• Communication without meaning preservation– Emitter can’t interpret its own signal
– Receiver reacts in a specific way (stimulus-response)
– Ex. Mating displays, bacteria emit chemicals
• Communication with meaning preservation– Shared common representation
– Ex. Ant leaves pheromone trail to food, itself & peers can follow
– Ex. Wolves leave scent markings

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 43
8 Summary: Collective• Composition
– Homogeneous, Heterogeneous
• Size of the collective– Alone, Pair, Limited, Infinite
• Communication– Infinite- comms are free– Motion – costs as much to communicate as it would to move– Low – comms costs more than moving from one location to another– Zero – no communication between agents– Topology
• Broadcast, address, tree, graph
• Collective reconfigurability– Static, Communicated, Dynamically

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 44
8 Class Exercise
• Consider the case of resupply, where many multiple vehicles are in the field and a lesser number of smaller vehicles exist to carry fuel to them, return to base, and then carry more fuel out on demand. A field vehicle emits a message that it needs to be refueled. The message intensity increases inversely proportional to the amount of remaining fuel.
• Describe the MAS task.
• Describe the MAS collective.

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 45
8 In the end…most popular
• Homogeneous Non-communicating agents
• Heterogeneous Non-communicating agents
• Homogeneous communicating agents
• Heterogeneous communicating agents

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 46
8 Class Exercise
• Design a multi-agent team for USAR in terms of – Heterogeneity
– Control
– Cooperation
– Goals

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 47
8 How to Get “Right” Emergent Behavior
• Societal Rules vs. behaviors– Nerd Herd, Maja Mataric
• What if homogeneous, individual goals operating in the same area?: example-- traffic and traffic jams
• Motivation– ALLIANCE, Lynn Parker
• What if have single goal, divided among homogeneous agents and one robot breaks?: example—cleaning up a nuclear spill

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 48
8 Explicit Social Rules vs. Behaviors
• Societal Rules– Ignorant Coexistence
• Basic reactive approach, except robots couldn’t recognize other robots
• High degree of task interference
– Informed Coexistence• Recognize each other PLUS simple social rule: if detect robot,
stop and wait P; if still there, turn left then resume move to goal
• Better
– Intelligent Coexistence• Recognize each other PLUS behavior: repulsed by other robots
concurrent with attraction to move in same direction as the majority
• Best

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 49
8 Mataric’s Nerd Herd and Social Rules

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 50
8 Motivation: ALLIANCE
• Divide and conquer works until a robot fails; then what about the failed robot’s area
• Robot A fails:– It may realize that its not doing a good job: becomes
increasingly FRUSTRATED and change behavior (give up) called ACQUIESCENCE
• Allows other robots to help without task interference
– It may be clueless• Other robots can help, but not as efficiently
• Robot B is finished with its task– Sees that waiting on Robot A, and becomes increasingly
FRUSTRATED until it decides to help IMPATIENCE
– Goes and helps

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 51
8 ALLIANCE

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 52
8 Summary
• Many, cheap robots is often better than single, expensive robot
• Multi-agents are generally at least reactive, sometimes hybrid deliberative/reactive
• Dimensions for categorizing:– Heterogeneity, control, cooperation, and goals
– (may change dynamically)
• Interference is a big problem– Social rules
– Emotions, Motivation
• Social entropy can be used to measure heterogeneity
Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 53
8 Review Questions
• What are the dimensions of a multi-agent system?– Heterogeneity, control regime, cooperation, goals
• What are the four axes of a task in a collective?– time, subject of action, movement, dependency
• What are the four axes of a collective?– composition, size, communications, reconfigurability
• Which is more likely to fail to in the field?– a team R with 1 member of caste 1 and 5 members of caste 2
– A team R with 6 members of caste 1

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 54
8 New Material: Affective Computing
• Motivation for HRI• Key ideas: social informatics and
communication• Affective computing (emotions)
– Purpose of emotions
– Emotions in robots• Control/self-regulation
• Naturalistic interfaces
– Examples of robots with naturalistic interfaces

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 55
8 Motivation
• Robots often have to team with people or work in close proximity
• Key questions– How to divide up responsibilities or roles?
– How to change them dynamically?
– How do people like to interact with robots?
– How do they interact most effectively?
– Do robots and people need to “understand” each other (e.g., have a shared cognitive model)?

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 56
8 HCI
• Human-computer interfaces (HCI)– HCI: How people interact with computers– Many sub-areas
• Ergonomics
• Human Factors
• Usability
– Designers of computer interfaces have to have a model of what the user wants to do and their preferences/expectations in how to do it

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 57
8 HRI: Human-robot interaction• Human-robot interaction (HRI)
– How humans and robots interact with each other
– the space in which the agent system works including the task, agents and skills, environment and conditions, social informatics, and communication.
– Bi-directional HCI plus industrial organization theory
• Social informatics– Who has what role? When? How do they interact and change
roles/responsibilities? How do the agents fit into an organization?• Ex. Tool? Dog or horse? Peer?
• Communication– How do they communicate (verbal, signals, etc.)? What do they say to
each other? When?

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 58
8 Affective Computing
• Affect: – phenomena manifesting itself under the form of
feelings or emotions
• Affective computing: – Where computers take into account that users have
emotions
– … computers are exhibit emotions

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 59
8 Why Affective Robots? (Breazeal, Murphy)
• To provide naturalistic (or social) interfaces – Make interactions more enjoyable
– Make interactions more natural (see Nass)
– Facilitate social learning
• To simplify complex control issues – Emotions as Performance Monitor (and feedback)
– Sorting out among multiple processes• Knowing what matters
• Knowing what action to try
• Correcting errors and recognizing successes

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 60
8 Emotions: Appraisal Mechanism
• A mechanism for adapting to the world– Unconscious information processing of stimulus
significance
– Leads to a conscious, subjective experience
• Ex., fear– See a predator, start running
– Later, say “I felt scared”
• Ex. Standfast in cold– Reflex is to find shelter
– Emotions help adapt, overcome reflex

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 61
8 A Simplified Neurological Model(Scherer, Ortony)
Amygdala
Percepts(from cognitive areas)
Raw Signals(from senses)

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 62
8 Can Rapidly Change Behavior
Percepts(from cognitive areas)
Raw Signals(from senses)
Motivational-Behavioral(facial expressions,
Actions)
Amygdala

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 63
8 Can Cause a Physiological Response
Amygdala
Percepts(from cognitive areas)
Raw Signals(from senses)
Motivational-Behavioral(facial expressions,
Actions)
Somatic (endocrine system)

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 64
8 Can Lead to a “Feeling”
Amygdala
Percepts(from cognitive areas)
Raw Signals(from senses)
Motivational-Behavioral(facial expressions,
Actions)
Conscious-Interpretative(subjective emotion)
Somatic (endocrine system)

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 65
8 Appraising What? (Ortony)
Event,Agent
GoalsNorms/
StandardsTastes/
Attitudes
Goal-BasedEmotions
CompoundEmotions
Norm-BasedEmotions
Taste-BasedEmotions
Joy/DistressHope/FearRelief/
Disappoint.
Anger/Gratitude
Gratification/Remorse
Pride/Shame
Admiration/Reproach
Love/Hate
desirability praiseworthiness appealingness

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 66
8 Subjective Nature of Emotions
• “Fuzzy” subjective experience
• More of a spectrum than a single state– Joy/distress
– Hope/fear
• This spectrum can be broken into– Valence (where it is on the positive or negative side
of the spectrum)
– Intensity (what the value is: a little? A lot?)

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 67
8 Social Expression (Breazeal)
• We show emotions to– Share control between agents
• Taking turns
• Expressing intent
• Does this require a shared cognitive model?
– Invoke a response• Communicate intent and confirm message was
sent and received

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 68
8 Kismet

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 69
8 Multilevel Process Theory of Emotions (Leventhal and Scherer, 1987)
Levels: Emotional Processes
• Sensory-motor– Emotions modify the
motor outputs of active behaviors
• Schematic– Emotions control which
behaviors are active through prototypical schemas
– Can be implemented with scripts (Lisetti 97)
• Conceptual– Agent reasons about
emotions and projects into the future
Failure to make progress on tasks/goals changes emotional statewhich then produces multilevel response
Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 70
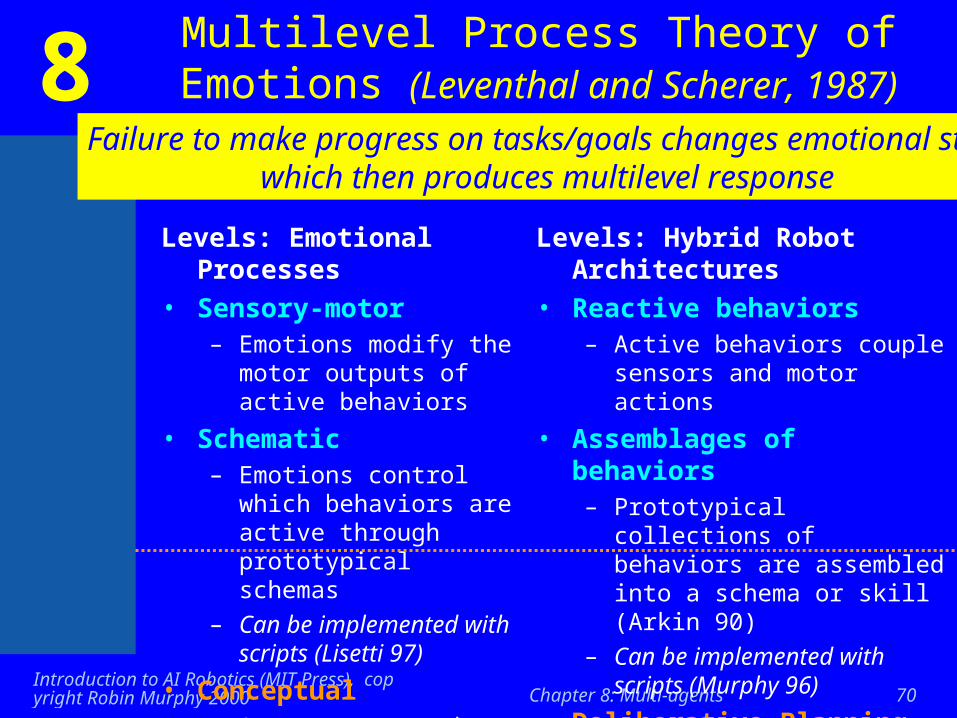
8 Multilevel Process Theory of Emotions (Leventhal and Scherer, 1987)
Levels: Emotional Processes
• Sensory-motor– Emotions modify the
motor outputs of active behaviors
• Schematic– Emotions control which
behaviors are active through prototypical schemas
– Can be implemented with scripts (Lisetti 97)
• Conceptual– Agent reasons about
emotions and projects into the future
Levels: Hybrid Robot Architectures
• Reactive behaviors– Active behaviors couple
sensors and motor actions
• Assemblages of behaviors– Prototypical collections of
behaviors are assembled into a schema or skill (Arkin 90)
– Can be implemented with scripts (Murphy 96)
• Deliberative Planning– Can reason about past,
present, and future
Failure to make progress on tasks/goals changes emotional statewhich then produces multilevel response

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 71
8 Case Study of Multi-Process Theory: USF Waiters
• Hors D’euvres Anyone? Event– Cover the most area while
serving food at a reception– Fully autonomous– Interact with humans
• Approach– Two robots, one with more
sensors than the others– Sensor-endowed robot is waiter
because can interact with people better
– Less-endowed robot acts as a refiller, bringing trays upon request to maximize coverage by waiter
– 1999: people trapped refiller (deadlock

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 72
8 “Normal” Implementation
BSG uses a FSA to instantiate behaviorswith a set of parametersand monitors based on a causal chain, or sequence triggered by task progress(if X achieved, then B2)

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 73
8 With Emotions
ESG uses a FSA to provide feedback: sensory-motor level “tweaks” parameters, while schematic level triggers alternative instantiations (escalating behavior)
The set of possible behaviors remains the same, but the activation and dynamic adaptation make it more reactive and opportunistic

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 74
8 Results: Hurried Refill• Claims
– The TMon has indicated a condition that requires the Refiller to hurry up.
– Waiter sends a “Hurry” message to Refiller
• Demonstrates– Refiller has a sensory-motor
level change affected by a change in ESG (speeds up).

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 75
8 Timeline - Hurried Refill

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 76
8 Results: Intercept• Claims
– Waiter has a Schematic level change, e.g. SERVE to INTERCEPT.
– TMon recognizes the “condition” that the Refiller is not going to arrive in time to avoid the Waiter having to wait without the required resource.
– This “condition” leads to the Emotional state change.
• Demonstrates– Emotional state change from
Concerned to Frustrated causes Waiter to have a schematic level change.
– This modification of behavior proactively avoids deadlock situation

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 77
8 Timeline - Intercept

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 78
8 Results: GoHome• Claims
– Waiter has a Schematic and Sensory-motor level changes in response to Anger.
• Demonstrates– Waiter experiences Anger
when Refiller is unable to successfully complete its assignment. Waiter essentially ‘fires’ the Refiller. Changes from SERVING to GOHOME.
– Waiter avoids deadlock by completing resupply itself.
– Waiter travels at the fastest speed possible.

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 79
8 Timeline - GoHome

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 80
8 Another Example: Grace• Winner AAAI 2002
Challenge Problem
• CMU (Reid Simmons), Metrica (David Kortenkamp), NRL (Alan Schultz), Swathmore (Bruce Maxwell)
• Navigate from lobby, go to registration desk, ask for packet, then go and give a talk in exhibition hall
• Expressions generated ad hoc, no formal model of emotions

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 81
8 Other Interesting Work
• Affective Software Agents– Valesquez (MIT)
• Museum robots– Sebastian Thrun (CMU)
– Illah Nourbaksh (CMU)
• Affective control of teams– Michaud (Sherbrooke)
– Lisetti (UCF)

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 82
8 Review Questions: HRI & Affective Computing
• What is HRI?– How humans and robots interact with each other
• Define affective computing
– Where computers take into account that users have emotions
• Give two uses of affective computing in robotics– Control or self-regulation
– Naturalistic interfaces
• Can you have an emotional response without be conscious of it?– Yes
Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 83
8 Review (Cont.)
• What is valence and intensity of a emotion?– Valence is where the affect is on the emotion’s spectrum
– Intensity is how strong the emotion is
• What are the three layers of multi-level process theory of emotions? What layers in a hybrid architecture do they correspond to?– Sensorimotor, Schematic, Conceptual
– Sensorimotor, Schematic -> reactive, Conceptual -> deliberative

Introduction to AI Robotics (MIT Press), copyright Robin Murphy 2000 Chapter 8: Multi-agents 84
8 Review (Cont.)
• What did the following systems contribute in terms of emotions?– Kismet
• Social interface
– USF Waiters• Self-regulation, implementation of multi-process theory of
emotions
– Grace• Ad hoc use of emotions for naturalistic interface