a marine robotics point of view for coastal … · robotics and oceanography ... embedded system...
TRANSCRIPT

A Marine Robotics point of view
for Coastal Oceanography
Benoît CLEMENT

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 2
Outline
• Various robots
• Scientific issues linked to marine robotics
• Focus on VAIMOS, a sailboat robot
(collaboration Ifremer / Ensta Bretagne)
• Other fields for robotics

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 3
Robotics and Oceanography
• A robot can go where an oceanographic boat cannot
– Forbidden access as caves
– Dangerous areas as glaciers in Greenland
– Very deep
– Access to the first layer of subsurface
• A robot can be more discrete than an oceanographic
boat
– a sailboat robot or a glider has really low acoustic and thermal
signatures
– Robots can be very small
– It can be in a sleeping mode for a long time waiting for an event

Some Marine Robots

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 5
Marine robots 1/5 - ROV
• Remotely Operated Vehicle : need of an experimented
operator
• Commonly used for
– Offshore industry
– Inspection
– manipulation

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 6
Marine Robots 2/5 - AUV
• Autonomous Underwater Vehicle : Autonomous with
high level control
• Usage
– Observation
– Mine detection
– measurements

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 7
Marine Robots 3/5 - Glider
• Variable buoyancy with long term
autonomy
• Mainly used for oceanography

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 8
Marine Robots 4/5 - bio inspired
• Inspired from marine animals
– Jelly fish, snakes, fishes…
• Usage
– Game, animation
– Pure knowledge
– Also some military ideas
Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 9
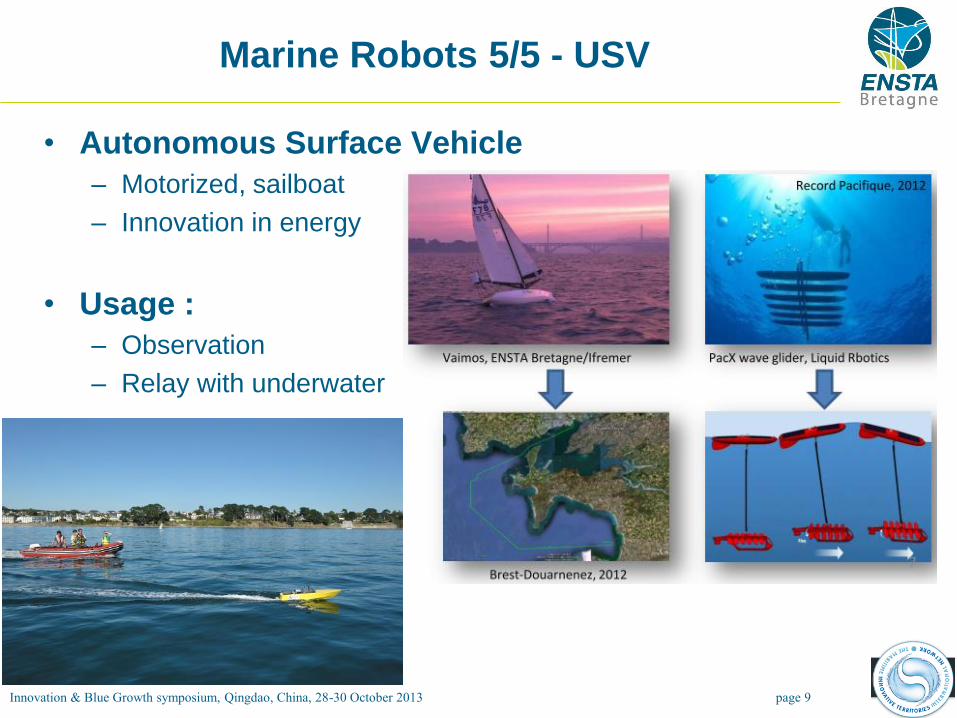
Marine Robots 5/5 - USV
• Autonomous Surface Vehicle
– Motorized, sailboat
– Innovation in energy
• Usage :
– Observation
– Relay with underwater

Robotics limitations

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 11
Scientific issues
Some examples
• Perception
• Localisation
• Communications
• Swarm
• Control
• …

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 12
Issue 1/5 - Perception
• Underwater perception is acoustic or visual:
– Target characterization
– Structure inspection, following
Via
– form recognition
– 3D reconstruction
Sonar issues:
• Technology to be improved
• Low precision
Vision issues:
• Turbidity
• Colors absorption, light
• Classical methods are not
efficient

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 13
Issue 2/5 - Localization
• Objectives : data geolocalisation
• Main difficulties:
– no GPS signal
– Low resolution from sonar data
– Few landmarks (except in specific areas)

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 14
Issue 3/5 - communication
• Information transfer is needed
– Between underwater robots
– With the enduser
• Difficulties
– Very low rate of flow (from few bytes/sec to kbytes/sec)
– Diffraction, attenuation, reflexions

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 15
Issue 4/5 - Swarm
• The use of multiple marine robots
– Reduce the duration of exploration
– Simultanaously geographic and temporal observations
– Cost reduction
• Difficulties
– Communication
– Planification
– Reconfiguration

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 16
Issue 5/5 - Control
• Using small robots (<30kg)
– Ratio power/wheight is high
– Increase sensibility to disturbances, to model parameters
– Coupling between motors and structure
• Need : new control approach as PID control is not
enough anymore
– Adaptive control
– Model based control

VAIMOS : an oceanographic robot

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 18
The boat : VAIMOS
• Modified Miniji : initially for
disabled people

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 19
An oceanographic mission
• Sailing robot
– No thermal signature
– No acoustic signature
– Long term mission
• Oceanographic motivation:
– First layer may present surface singularities for bio-geochemical
parameters (temperature, salinity, turbidity, chlorophyll).
– common view is a homogeneous mixed layer but it remains largely
unknown because of the lack of adequate instruments to sample
the first centimeters of the ocean
• Demonstration with sensors and pumps in the hull

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 20
Embedded system architecture
• 2 Sensors:
– a weather station : wind speed
and direction, air temperature,
atmospheric pressure, GPS
position, heading;
– IMU for reliable kinematic
parameters
• 2 actuators:
– a brushless motor for the
rudder;
– a stepping motor for the sail;
• An embedded Linux
• power supply: 2x12V
marine
Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 21
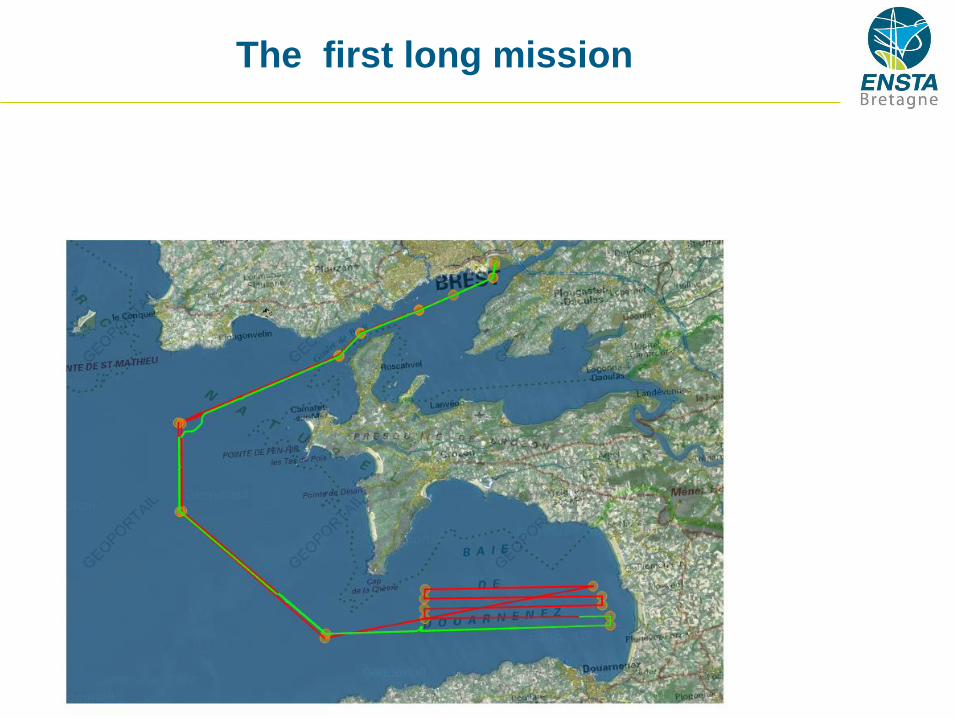
The first long mission

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 22
Concluding remarks
• Robotic concepts are not limited
• Some technological issues are under investigations in
laboratories worldwide
• Other fields of interest for marine robotics

Innovation & Blue Growth symposium, Qingdao, China, 28-30 October 2013 page 23
Questions
• contact :
– Benoît CLEMENT
• Email :
benoit.clement@ensta-
bretagne.fr
• Web : http://www.ensta-
bretagne.fr/clement/