airborne lasers and integrated weapon systems: design ... lasers and... · airborne lasers and...
TRANSCRIPT
Airborne Lasers and Integrated Weapon
Systems: Design, Development,
Test and Evaluation
San Jose dos Campos, 30th September 2015
NATO UNCLASSIFIED – Approved for Public Release
Prof. Roberto Sabatini, PhD, FRIN Head of Group, Intelligent Transport Systems and Aviation Program Leader
Avionics and ATM Leader, Sir L. Wackett Aerospace Research Centre
School of Aerospace, Mechanical and Manufacturing Engineering
RMIT University, Melbourne, Victoria, Australia
INVITED PLENARY SPEACH

INTRODUCTION
MILITARY REQUIREMENTS
CLDP, GBU-16 AND GBU-24 SYSTEMS DESCRIPTION
CLDP HMI, FUNCTIONS AND EMPLOYMENT
LGB SELF-DESIGNATION AND CO-OPERATIVE ATTACKS
FLIGHT TEST REQUIREMENTS AND METHODS
SOFTWARE DEVELOPMENT AND TESTING
MODELLING AND SIMULATION
FLIGHT TEST ACTIVITY
FINAL REMARKS
SCOPE OF THE PRESENTATION
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
LOAM SYSTEM DESCRIPTION

XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
INTRODUCTION
q Since the beginning of the 90’s, the NATO Defence Forces have been involved in
activities related with:
Laser Guided Weapons;
Laser Designation Systems.
q In the ITAF R&FTC (CSV-RSV) the Thales Convertible Laser Designation Pod
(CLDP), together with Laser Guided Bombs (LGBs), have been integrated on
TORNADO-IDS aircraft.
q A new tailored RDT&E was adopted in order to:
Reduce the costs associated with the development process; Obtain the higher possible level of efficiency.
Laser Navigation Aid and Obstacle Warning Systems
q The Laser Obstacle Avoidance and Monitoring System (LOAM) was developed
under to equip helicopters, with a focus on NH-90 (Eurocopter) rerquirements and
possible further applications to low dynamics platforms (e.g., small size UAVs).
q Modelling and Simulation were essential for correctly planning flight test activities, analysing flight test data and verifying the validity of the models/algorithms loaded in the operational aircraft software.
Store Separation Simulation;
Aerodynamic Simulation;
Guided/Unguided Weapon Simulation;
Masking Algorithms Simulation;
Aircraft Weapon Aiming Simulation;
Laser Performance Simulation;
Ballistic and Laser Safety Areas Simulation.
q Simulation Tools developed during Sub-System integration activities included thefollowing:
INTRODUCTION
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

LTD/LGB MILITARY REQUIREMENTS
q Initial MOD Requirements (“Lesson learned” of the “Desert Storm” operation):
COTS Bang-Bang Laser Guided Bombs; COTS Day-Night Laser Designation Pod.
q Further MOD Requirements:
Improve Sub-System Software capability; Integrate LGBs with a longer operational range and higher accuracy/hit probabilities.
q Operational Requirements for LTD and LGBs included definition of:
Specific Mission Requirements;
Functional Requirements;
Crew Members Workload;
Human-Machine Interface (HMI).
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

q Systems Selection Criteria (LGB’s and LTD):
Proven operational capability; Full compliance with the basic operational requirements; Low risk during the development phase; Commonality with other sub-systems and TORNADO-IDS suspension system; State-of-the-art technology in order to guarantee longer operational life;
q Selected Systems :
THALES Convertible Laser Designation Pod (CLDP); GBU-16 Laser Guided Weapon (Paveway II); GBU-24 Laser Guided Weapon (Paveway III).
LTD/LGBMILITARY REQUIREMENTS
Upgrade potentials for future applications.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
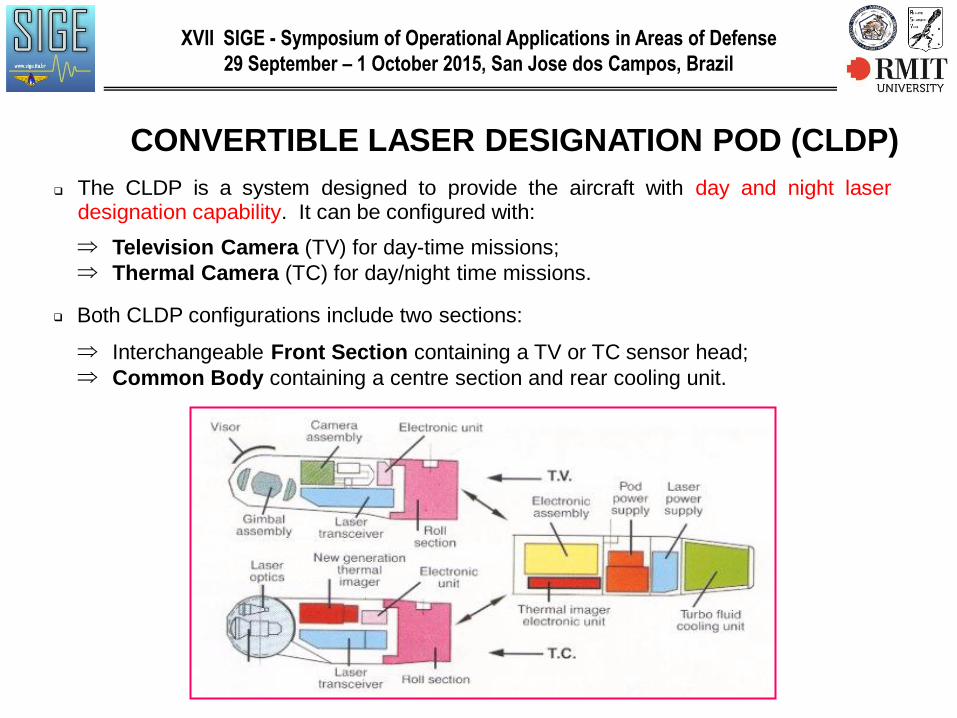
q The CLDP is a system designed to provide the aircraft with day and night laserdesignation capability. It can be configured with:
CONVERTIBLE LASER DESIGNATION POD (CLDP)
q Both CLDP configurations include two sections:
Interchangeable Front Section containing a TV or TC sensor head; Common Body containing a centre section and rear cooling unit.
Television Camera (TV) for day-time missions; Thermal Camera (TC) for day/night time missions.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

GBU-16 LASER GUIDED BOMB (PAVEWAY II)
q The GBU-16 (PAVEWAY II) Laser Guided Bomb consists of:
Forward Computer Control Group (CCG) including control canards and an aftwing assembly;
MK-83 1000 pound warhead.
q The Detector Unit Housing (DUH) is mounted on the front section of the CCG and isfree to gimbal in any direction (aerodynamically stabilised with the velocity vector of theweapon).
q GBU-16 guidance is provided by a system commonly referred to as “Bang-Bang”control.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

q The GBU-24 (PAVEWAY III) is a laser guided munition designed to enhance Low Altitude Delivery. PAVEWAY III consist of:
Nose Mounted Guidance Unit;
Aft Wing Assembly. q The Air Force selected two 2000 pound bombs:
MK-84 2000 pound warhead;
BLU-109 high penetration warhead. q GBU-24 is a “Proportional Guidance” LGB. q The bomb has 4 Operational Modes depending on target characteristics and
desired bomb impact angle. For each mode, the GBU-24 computer unit automatically selects a suitable flight profile.
GBU-24 LASER GUIDED BOMB (PAVEWAY III)
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

CLDP FORMAT
Functions selected
through dedicated SKs
CLDP
CONTROL
PANEL
CLDP MAN - MACHINE INTERFACE
q CLDP main functions are selected by the Weapon System Operator (WSO).Commands and controls are located in the Tornado Rear Cockpit.
q Pod Line of Sight (LOS) controls are located both in Front and Rear Cockpit.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

CLDP BASIC SUB-SYSTEM FUNCTIONS
q CLDP System Status Check
q Slave Modes
q Track Modes
q Computer Rate Track
q Masking
q Reversionary
q Pod-Aircraft Harmonization
q Video-Laser Boresight
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
CLDP OPERATIONAL EMPLOYMENT
q Self Designation Attacks
Aircraft acts as illuminator for the own carried LGBs.
q Co-operative Designation Attacks.
Aircraft acts as illuminator for partner(s) aircraft.
q CLDP Target/Navigation Fixing.
CLDP can be used as a sensor for 2D/3D Navigation/Target Fixing purposes.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
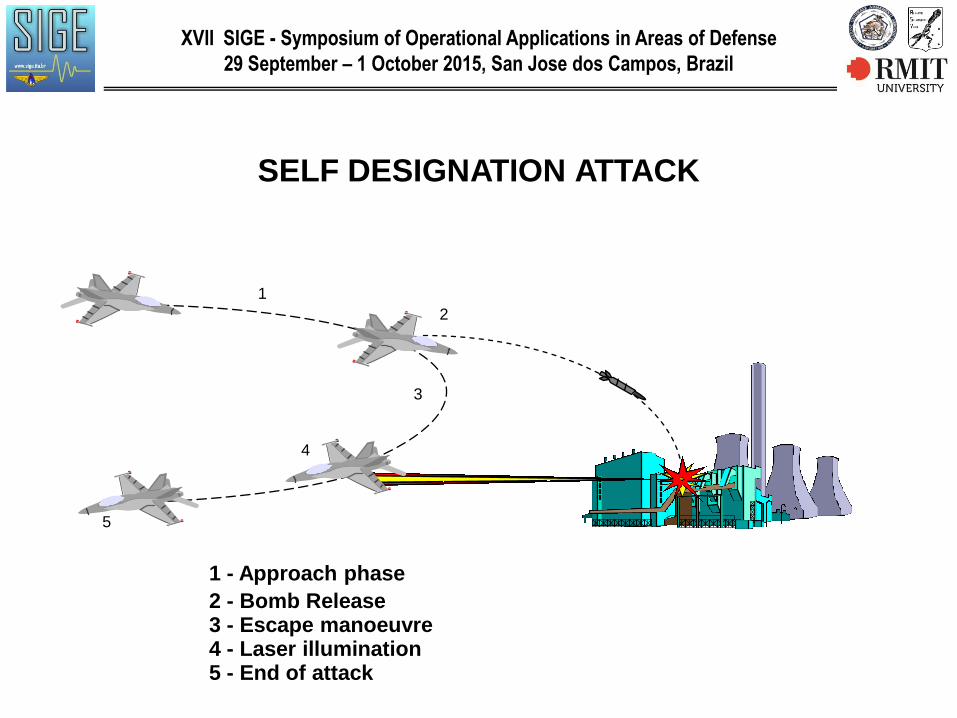
SELF DESIGNATION ATTACK
1
2
3
4
1 - Approach phase
5
2 - Bomb Release
4 - Laser illumination 3 - Escape manoeuvre
5 - End of attack
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
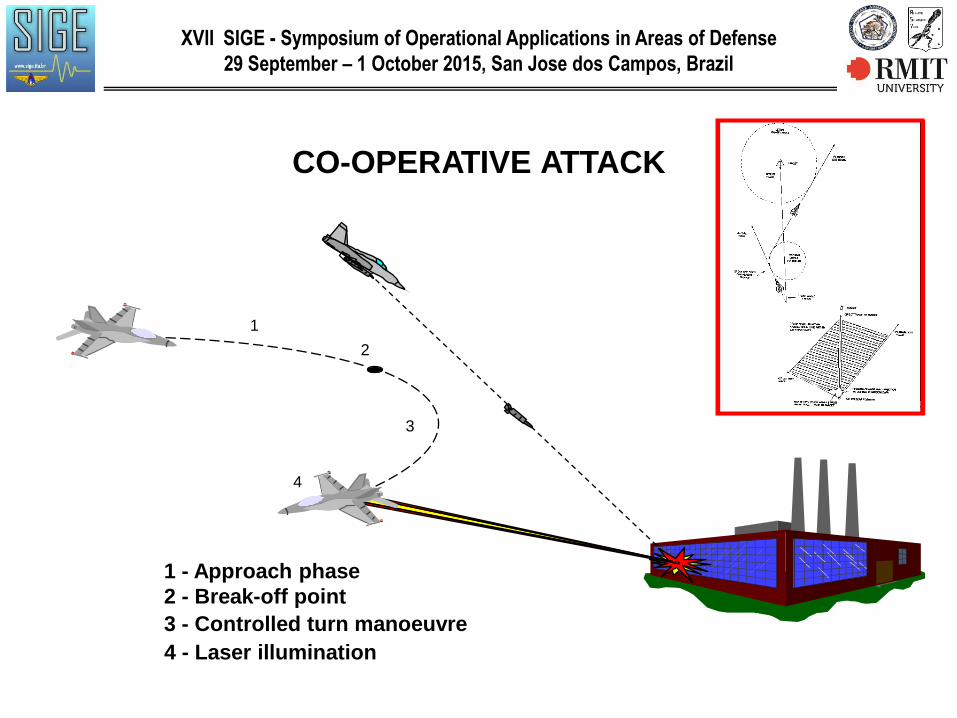
CO-OPERATIVE ATTACK
1 - Approach phase
4 - Laser illumination
2 - Break-off point
3 - Controlled turn manoeuvre
2
1
3
4
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
LTD/LGB SEQUENCE OF OPERATIONS

TEST REQUIREMENTS
q Areas of Testing:
Test RequirementsMathematical ModelsAnalysis Tools
Flight mechanics (handling/vibration); Store separation ( LGB’s);
Software development; Avionics and Sub-systems functions verification.
Data Acquisitionand
Telemetry System
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

FLIGHT MECHANICS TESTING
q Handling
Typical maneuvers were performed to verify aircraft stability and control at theselected flight conditions identified through mathematical models.
q Vibration
Activity needed to measure the actual vibration levels induced on CLDP andAdapter under the selected flight conditions and aircraft external stores configurations.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

STORE SEPARATION TESTING
q LGB Jettison and Releases performed at the selected flight conditions to:
Confirm the store separation predicted by mathematical models;
Verify any possible mechanical interference between ‘dressing’ and TORNADO suspension system;
Verify aerodynamic influence on unguided store trajectory;
Acquire data for optimising ballistic constants;
Optimise attack profiles.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

SOFTWARE DEVELOPMENT AND TESTING
q Development of Avionics Softwarerequired moving into the followingprocess:
SW
Definition
SW
Requirement
Specification
SW
Coding
Ground
Tests
Limits ?
Queries ?
Yes
No
Flight
Trials
Limits ?
Queries ?
Yes
No
In Flight
Final Demo
SW
Delivery
No
Yes
No
Software Definition ;
Software Coding ;
Software Testing .
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

SIMULATION
q Store Separation Simulation
q Aerodynamic Simulation
q Unguided Weapon Ballistics
q Masking Analysis and Simulation
q Weapon Aiming Simulation
q Guided Weapon Simulation
q CLDP Performance Simulation
q Ballistic and Laser Safety Areas
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
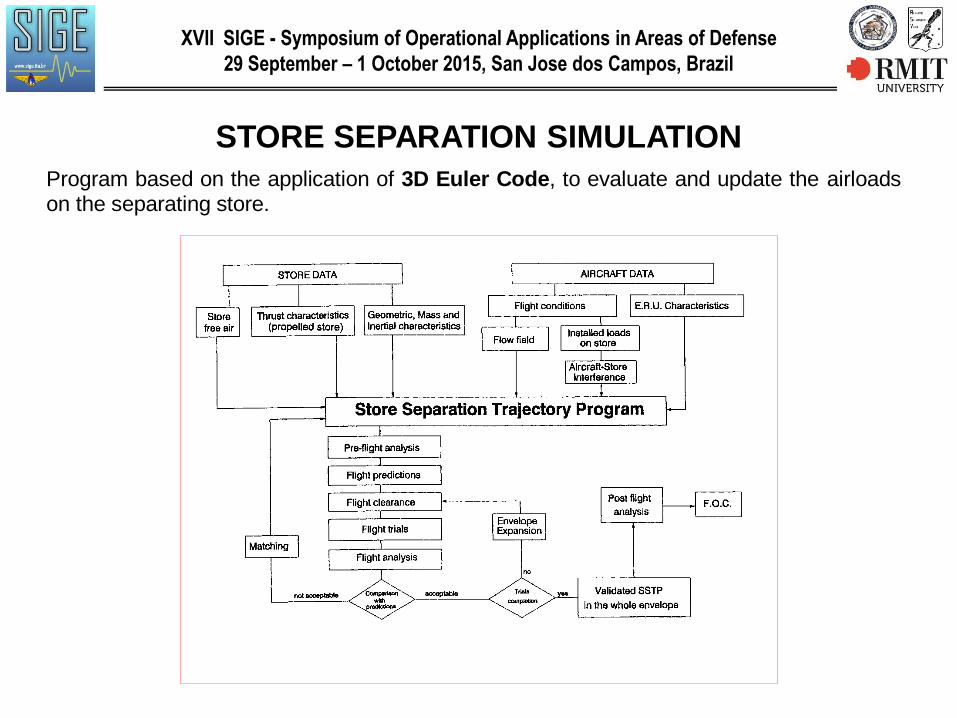
STORE SEPARATION SIMULATION
Program based on the application of 3D Euler Code, to evaluate and update the airloadson the separating store.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
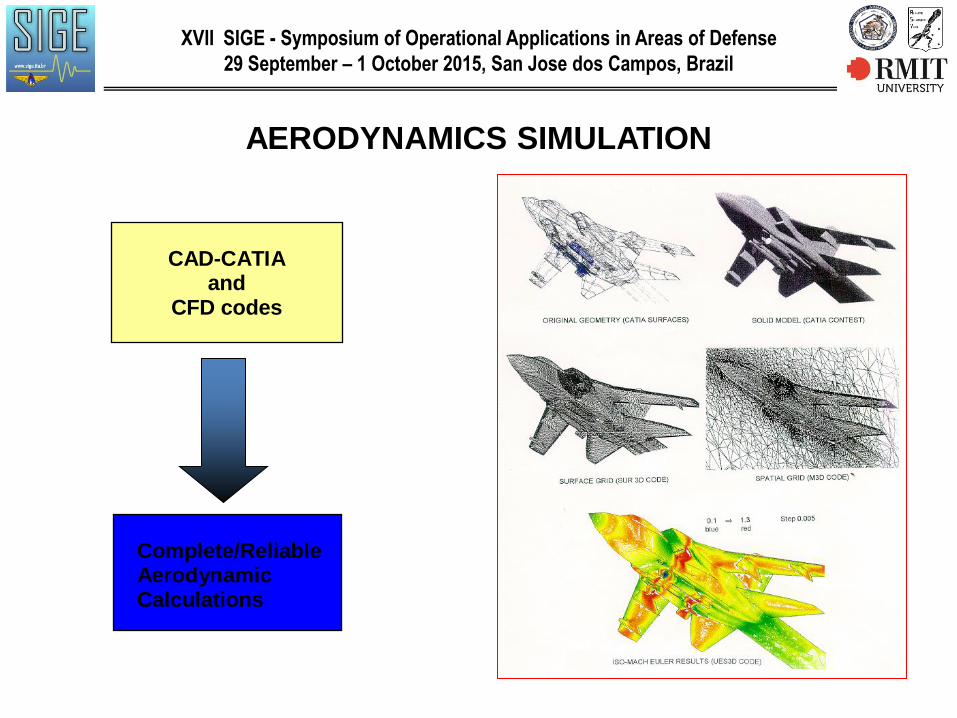
AERODYNAMICS SIMULATION
CAD-CATIAand
CFD codes
Complete/Reliable Aerodynamic Calculations
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
LGB WEAPON BALLISTIC SIMULATION
q Guided Weapon Ballistics Program (GWBP)
Program capable of computing the guided LGB weapon trajectory. GWBP outputs are: - bomb flight conditions where the target enters into the seeker field of view; - bomb flight conditions when the las er starts to fire; - bomb flight condition where the bomb starts the guided trajectory; - bomb flight conditions along the guided trajectory; - impact point with respect the spot laser; - bomb time of flight.
q Unguided Weapon Ballistics Program (UWBP)
The UWBP was developed at RSV in order to compute unguided ballistic tables for any type of bomb released by any type of aircraft, and to define attack release conditions. The output ballistics tables consisted of the following parameters:
- bomb range; - bomb time of flight; - bomb impact angle; - bomb impact velocity; - bomb depression angle relative to the aircraft at time of release.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
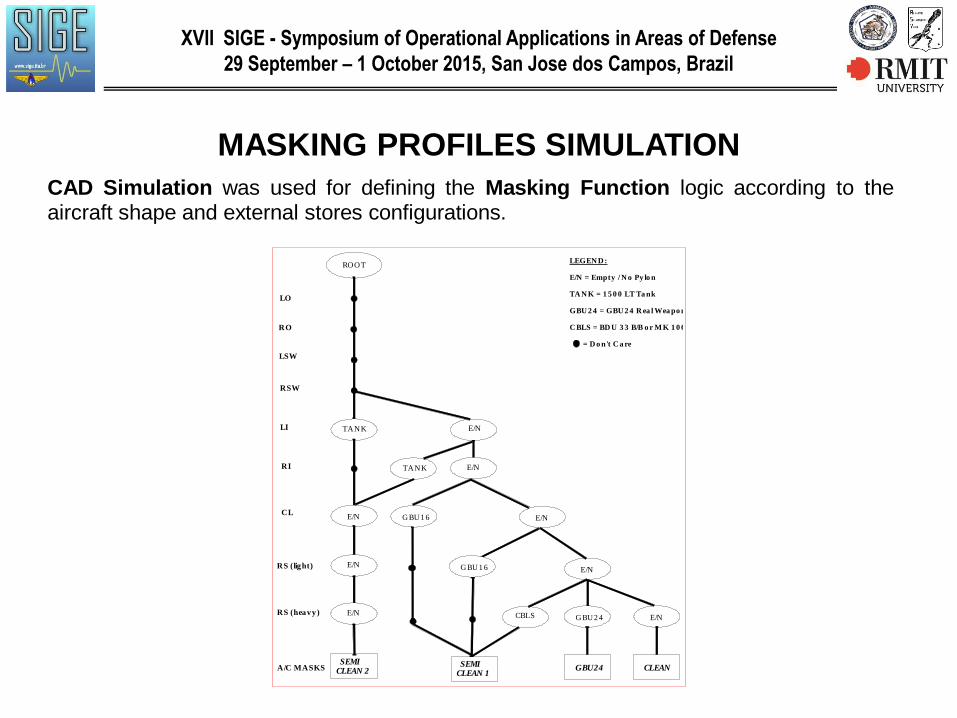
MASKING PROFILES SIMULATION
CAD Simulation was used for defining the Masking Function logic according to theaircraft shape and external stores configurations.
ROOT
LO
RO
LSW
TANKLI
RI
E/NCL
E/N
A/C MASKS SEMICLEAN 2
TANK
E/N
GBU2 4
GBU24
E/N
E/N
E/N
CLEAN
LEGEN D :
E/N = Empty / N o Py lo n
TA N K = 1 5 0 0 LT Ta nk
GBU 2 4 = GBU 2 4 R ea l Wea po n
C BLS = BD U 3 3 B/B o r M K 1 0 6
= D o n't C a re
TANK
RS (light)
CBLS
GBU1 6
RS (heavy) E/N
GBU1 6
SEMICLEAN 1
E/N
RSW
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

ATTACK PROFILES SIMULATION
An Attack Profiles Simulation (APS) tool was developed for monitoring the LOS components (Azimuth and Elevation) during A/C manoeuvres, in an Hammer/Aitoff Diagram where mask and pre-mask profiles were plotted.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
q For Weapon Aiming assessment purposes, a simulation program was developed atRSV. The program used the same models adopted by the TORNADO MainComputer (MC) for execution of the various attacks.
TORNADO WEAPON AIMING SIMULATION
q Two GBU-24 software modules were developed covering specific sub-tasks:
a module for selecting the appropriate set of envelope constants dependingon aircraft flight/release conditions;
a second module, based on neural networks algorithms, for calculating therelease range envelope for a successful bomb release.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

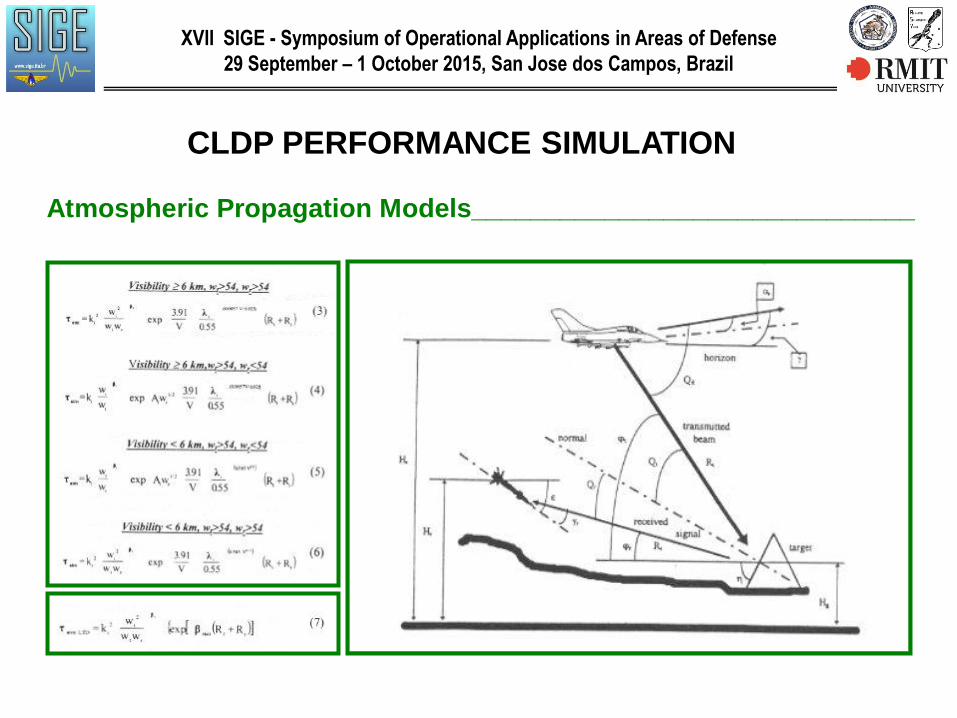
CLDP PERFORMANCE SIMULATION
q The models used for performance calculations were:
Geometric Model
Laser Range Equation
Atmospheric Propagation Models
Reflection Models
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

CLDP PERFORMANCE SIMULATION
Geometric Model________________________________________________
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

CLDP PERFORMANCE SIMULATION
Laser Range Equation_________________________________________
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
CLDP PERFORMANCE SIMULATION
Atmospheric Propagation Models______________________________
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
CLDP PERFORMANCE SIMULATION
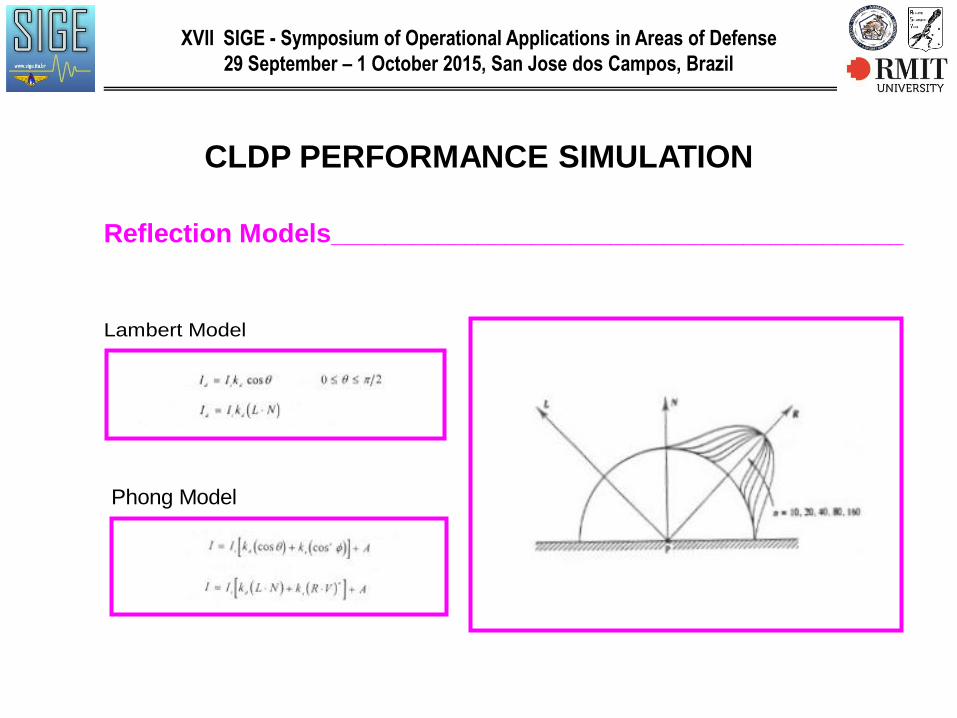
Reflection Models___________________________________________
Lambert Model
Phong Model
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
BALLISTIC SAFETY AREAS
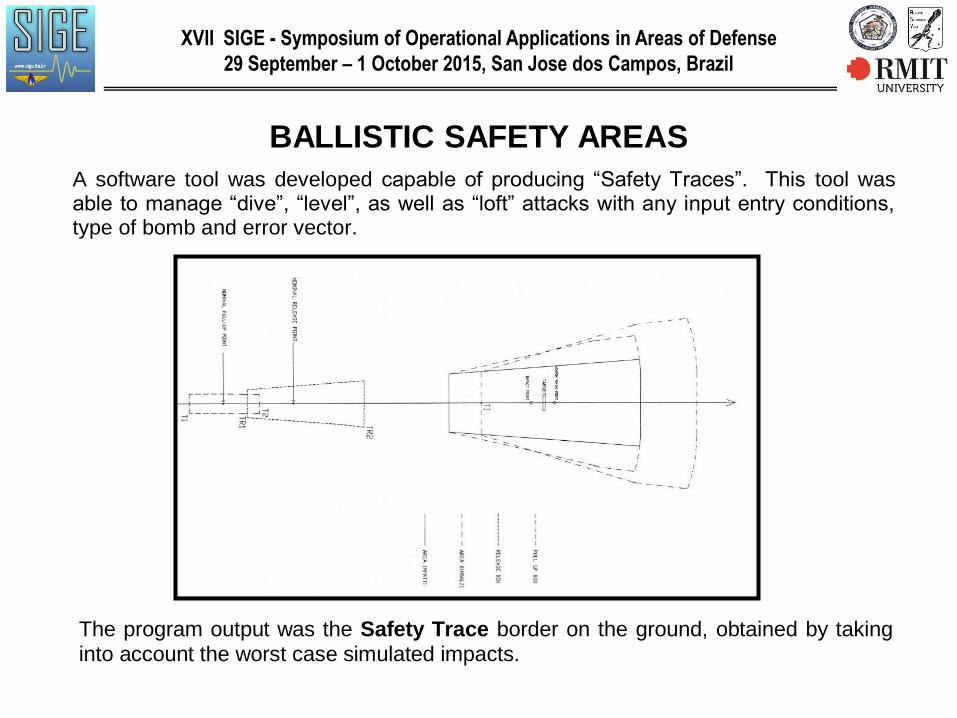
A software tool was developed capable of producing “Safety Traces”. This tool was able to manage “dive”, “level”, as well as “loft” attacks with any input entry conditions, type of bomb and error vector.
The program output was the Safety Trace border on the ground, obtained by takinginto account the worst case simulated impacts.
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

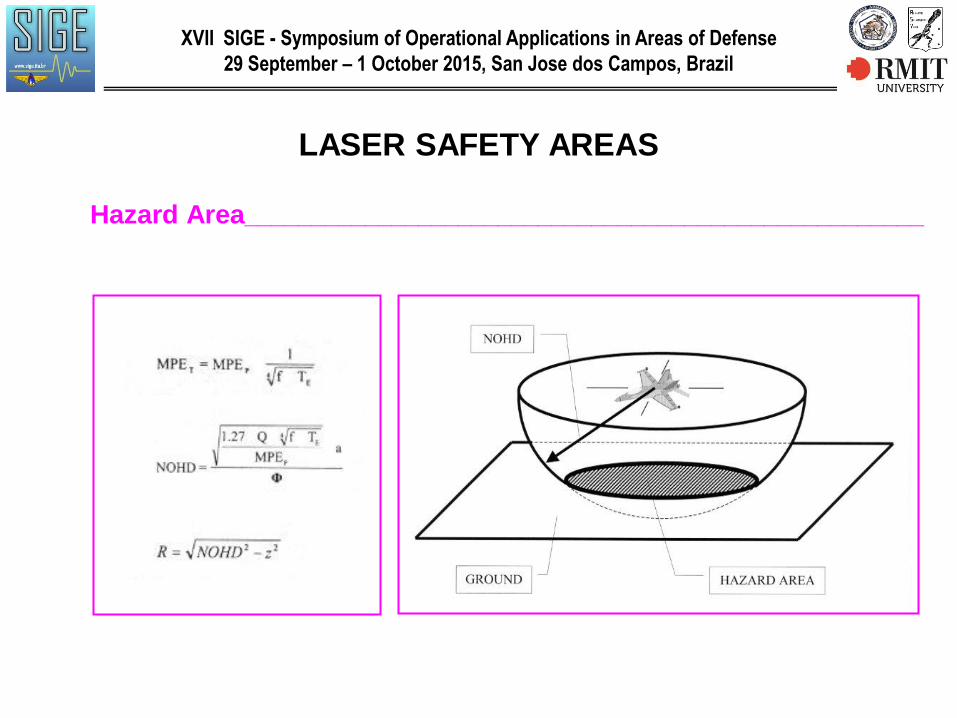
LASER SAFETY AREAS
q A simulation tool was implemented at RSV for laser missions planning andoptimisation. The program was based on the following calculations:
- Laser Characteristics - Aircraft Position and Velocity - Reflection Point Position - Observer Position
Exposure Time Calculation
NOHD Calculation
NOHD >
Distance Observer-Reflection Point +
Reflection point-aircraft
Safe Scenario
Unsafe Scenario
TRUE
FALSE
Nominal Ocular Hazard Distance (NOHD)
Buffer Zone (BZ)
Hazard Area (HA)
Extended Buffer Zone (EBZ)
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
LASER SAFETY AREAS
Hazard Area___________________________________________________
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

Buffer Zone_________________________________________________
LASER SAFETY AREAS
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

Extended Buffer Zone___________________________________________
LASER SAFETY AREAS
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

FLIGHT TEST ACTIVITY
Functional assessment was carried out at the Air Force Sardinia Test Range (PISQ)and included:
‘Dry Attack’ Flights – performed over the PISQ Sea Range (Salto di Quirra);
‘Hot Attack’ Flights – performed over the PISQ Ground Range (Piana del Cardiga).
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

Self Designation Reversionary
FLIGHT TEST ACTIVITY
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

FLIGHT TEST ACTIVITY
Sardinia Test Range currently immediate actions:
PISQ Ground Range ‘Evacuation of Personnel’ – Safety
Safety Officer Monitoring (PISQ Control Room) – Safety and ATC Coordination
Real-time Telemetry Link for CLDP Video – Safety and Accuracy
Sardinia Test Range upgrades (PILASTER):
Laser Spot Tracking System (SAPD) – Safety and Pointing Accuracy
IR Laser Signal Measuring System (IRSM) – Performance Evaluation
Real-Time Encrypted Telemetry Link (ETL) – Safety, Comms and Accuracy
Ground Soft Target – Test/Training “Dry/Hot Attacks” w/o LGB Delivery
Ground Hard Target – Test/Training “Hot Attacks” with LGB Delivery
Control Room Upgrade – SAPD, IRSM and ETL Management
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
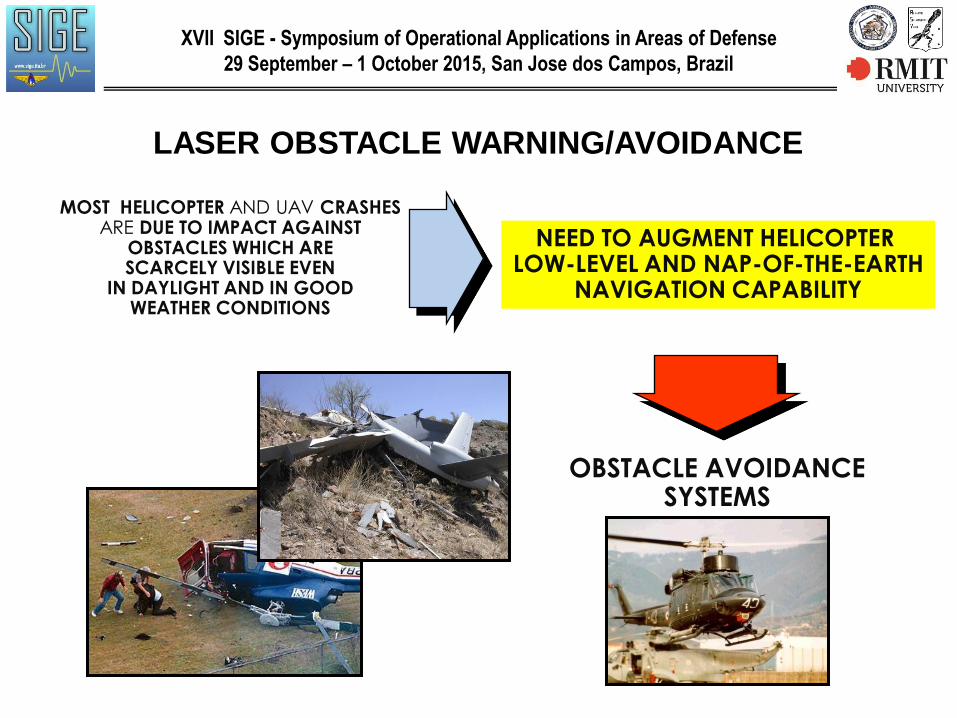
MOST HELICOPTER AND UAV CRASHES ARE DUE TO IMPACT AGAINST
OBSTACLES WHICH ARE SCARCELY VISIBLE EVEN
IN DAYLIGHT AND IN GOOD WEATHER CONDITIONS
NEED TO AUGMENT HELICOPTER LOW-LEVEL AND NAP-OF-THE-EARTH
NAVIGATION CAPABILITY
OBSTACLE AVOIDANCE SYSTEMS
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
LASER OBSTACLE WARNING/AVOIDANCE

WARNING TIME • 10 SECONDS
FLIGHT CONDITIONS
DETECTION • ANY OBSTACLE ALONG FLIGHT PATH • EXPECIALLY WIRES
HMI • TYPE OF OBSTACLE • LOCATION • AVOIDANCE ADVICE
• STRAIGHT FLIGHT (UP TO 260 Km/h)
• TURN (UP TO ABOUT 30 deg)
• TERRAIN FLIGHT
• DAY/NIGHT NVD
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
OPERATIONAL REQUIREMENTS
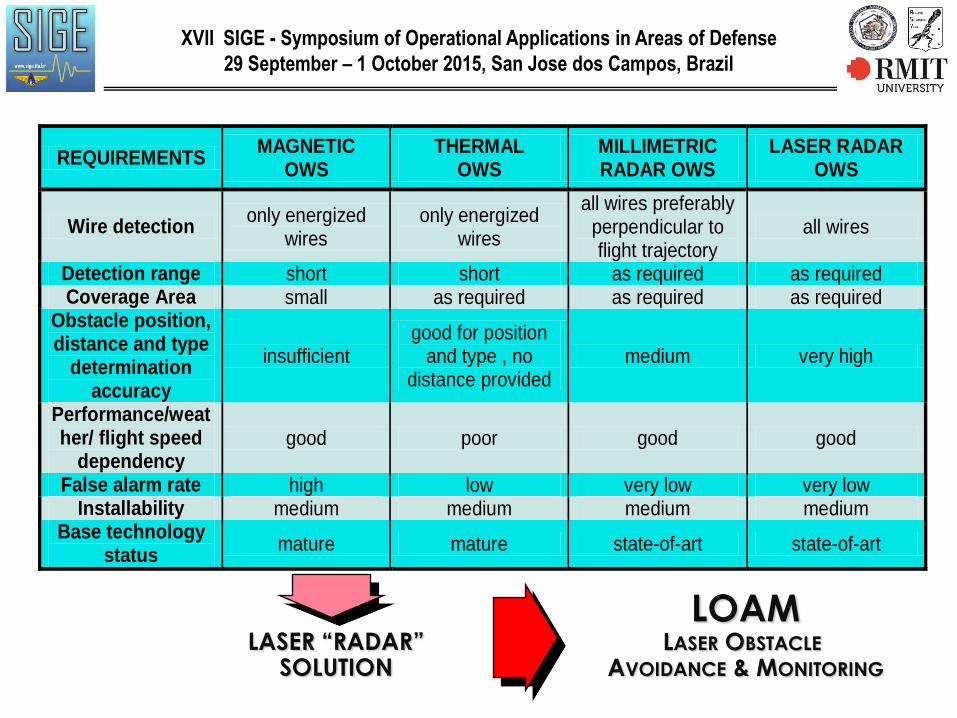
LASER “RADAR” SOLUTION
LOAM LASER OBSTACLE
AVOIDANCE & MONITORING
REQUIREMENTS MAGNETIC
OWS THERMAL
OWS MILLIMETRIC RADAR OWS
LASER RADAR OWS
Wire detection only energized
wires only energized
wires
all wires preferably perpendicular to flight trajectory
all wires
Detection range short short as required as required Coverage Area small as required as required as required
Obstacle position, distance and type
determination accuracy
insufficient good for position
and type , no distance provided
medium very high
Performance/weather/ flight speed
dependency good poor good good
False alarm rate high low very low very low Installability medium medium medium medium
Base technology status
mature mature state-of-art state-of-art
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

OBSTACLES TYPE • WIRES (5 mm)
• PYLONS, POLES, TREES
• BUILDING, WALLS
FLIGHT ENVELOPE
INSTALLATION PLATFORMS
• ANY TYPE OF HELICOPTER AND SMALL UAV • STAND ALONE / INTEGRATED MODES
EYE-SAFETY • STANAG 3606 CLASS I
• STRAIGHT FLIGHT (UP TO 260 Km/h)
• TURN (UP TO ABOUT 30 deg)
• LANDING, TAKE OFF
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
LOAM TECHNICAL REQUIREMENTS

• SCAN BY LASER BEAM THE AREA AROUND THE FLIGHT TRAJECTORY
• OBSTACLES DETECTION AND CLASSIFICATION THROUGH ECHOES ANALYSIS
• DELIVERY OF WARNING AND INFORMATION TO THE CREW
• COMMUNICATE WITH OTHER ON-BOARD EQUIPMENT
SENSOR HEAD UNIT
• SELF TEST
CONTROL PANEL UNIT
LOAM FUNCTIONS
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

PARAMETERS PERFORMANCE
Vertical FOV > 30°
Horizontal FOV > 40°
LOS range Az 20°
LOS range El 20°
Instantaneous FOV < 2 mrad
Scan efficiency per one frame 1:15
Scan efficiency per 0,5 sec. 1:20
Max range 2000 m
Min range < 50 m
Range resolution < 1.5 m
Scanning time 0.5 s
Detection probability per 1 sec. > 99.5 %
False Alarm Rate < 1 per 2 flight hours
SUBSYSTEMDIMENSION
width x height x depth
Sensor Head Unit 320 x 239 x 419 mm
Control Panel Unit 146 x 38.1 x 165 mm
Display Unit (optional)4 ATI or3x4 ATI
Warning Unit (optional) 90 x 22 x 100
SUBSYSTEM WEIGHT (Kg)
Sensor Head Unit 24
Control Panel Unit 0.5
Display Unit (optional) 1.7
Warning Unit (optional) 0.5
PERFORMANCE
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

visibility 800 m
visibility 1500 m
visibility 2000 m
90
75
60
45
30
15 0
-15
-30
-45
-60
-75
-90 1000 900 800 700 600 500 400 300 200 100 0
Detection range for wires, d=5mm
90
75
60
45
30
15 0
-15
-30
-45
-60
-75
-90 1000 900 800 700 600 500 400 300 200 100 0
Detection range for wires, d=10mm
PERFORMANCE
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

TELESCOPE
SUB-ASSY
TX
OPTICS
DETECTOR
SUB-ASSY
LASER
ASSY
SCANNER CONTROL
&
PREPROCESSING ASSY
Blanking signal POWER SUPPLY &
POWER MOTORS
ASSY 28 Vdc
On/Off
Motors control signals
PROCESSING ASSY
HMD PROCESSING & VDU
VIDEO ASSY
MIL-STD 1553
ARINC 429
RS232 Test Link
GYROSCOPE
ASSY
OPTICAL
ASSY
WMC discrete
WOW (TBD)
WU P
(optional)
WU C
(optional)
WIN
DO
W
ELECTRONIC
MECHANIC
OPTIC
SCANNER
ASSEMBLY
CP
(helicopter)
HMD/C
HMD/P
VID
EO
RS
422
FLIR
VDU
VID
EO
VID
EO
RS
422
VID
EO
EXTERNAL
SYSTEM ARCHITECTURE
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
LOAM EQUIPMENT MAKES USE OF
ERBIUM FIBER 1.55 µm LASER
LOAM EQUIPMENT OPERATION IS ACCORDING TO
STANAG 3606 CLASS I(1)
(1) Class I lasers produce radiation that causes no biological damage
LASER SAFETY
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

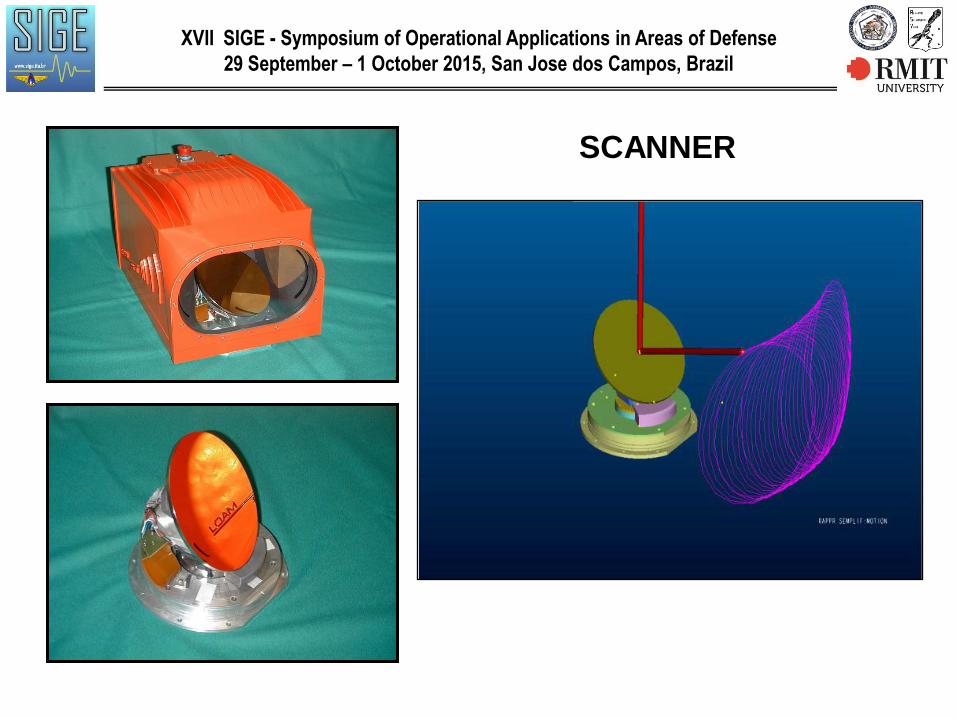
Sensor Head Unit
Control Panel Unit
Display Unit
(for test)
HARDWARE
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
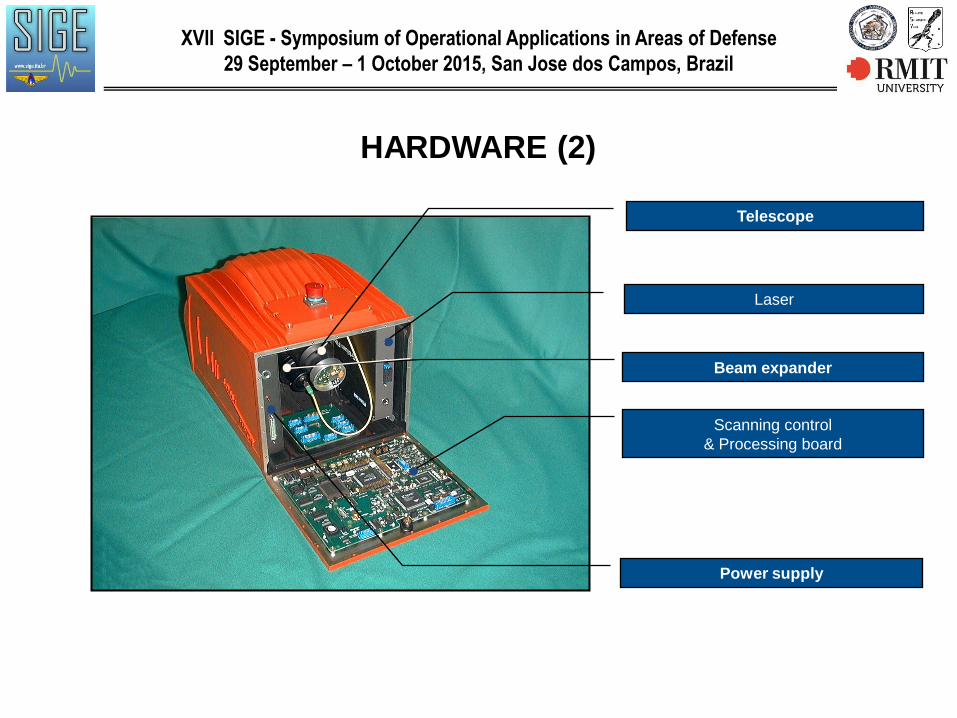
Laser
Beam expander
Scanning control
& Processing board
Telescope
Power supply
HARDWARE (2)
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
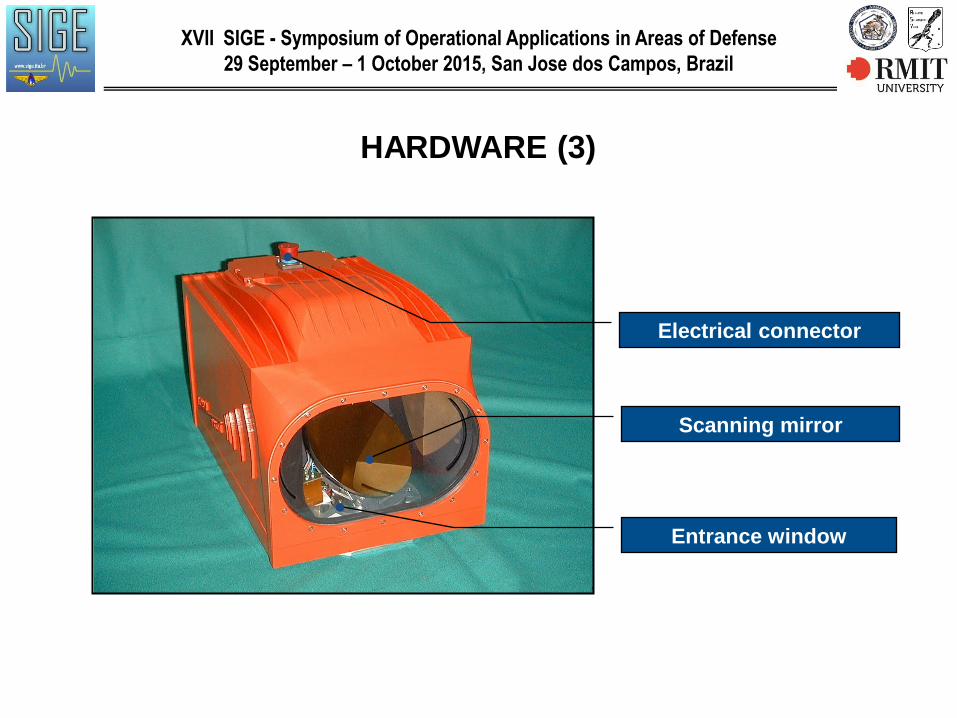
Entrance window
Scanning mirror
Electrical connector
HARDWARE (3)
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
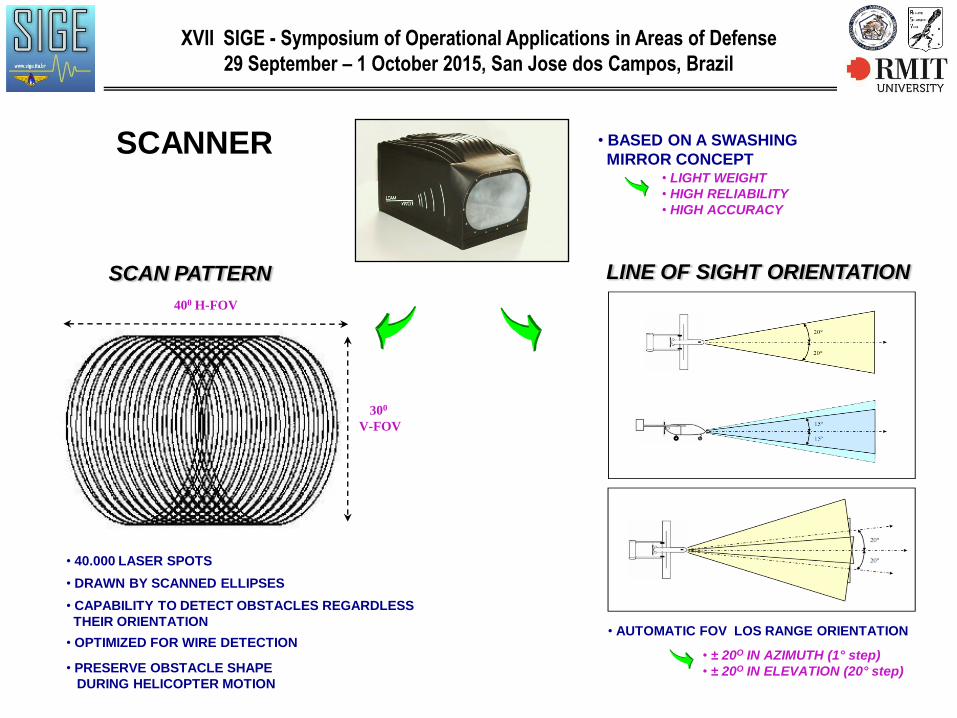
• BASED ON A SWASHING
MIRROR CONCEPT • LIGHT WEIGHT
• HIGH RELIABILITY
• HIGH ACCURACY
LINE OF SIGHT ORIENTATION
• AUTOMATIC FOV LOS RANGE ORIENTATION
• ± 20O IN AZIMUTH (1° step)
• ± 20O IN ELEVATION (20° step)
300
V-FOV
400 H-FOV
SCAN PATTERN
• 40.000 LASER SPOTS
• DRAWN BY SCANNED ELLIPSES
• CAPABILITY TO DETECT OBSTACLES REGARDLESS
THEIR ORIENTATION
• OPTIMIZED FOR WIRE DETECTION
• PRESERVE OBSTACLE SHAPE
DURING HELICOPTER MOTION
SCANNER
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
SCANNER
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

OBSTACLE CLASSIFICATION
OBSTACLE PRIORITYZATION
• CLASS “WIRE” (HORIZONTAL THIN STRUCTURE “WIRE LIKE”)
• CLASS “TREE/POLE” (VERTICAL SINGLE STRUCTURE “TREE OR PILON LIKE”)
• CLASS “EXTENDED OBSTACLE”
(BIDIMENSIONAL STRUCTURE “BUILDING OR HILL LIKE”)
OBSTACLE DETECTION
• ECHO DETECTION (AVALANCHE PHOTODIODE, VARIABLE GAIN AMPLIFIER)
• PRE PROCESSING
(SINGLE ECHO POSITION/DISTANCE ANALYSIS)
• PROCESSING
(PREPROCESSED ECHOES GLOBAL ANALYSIS)
• BASED ON OBSTACLE RANGE AND FLIGHT PATH
• SELECTABLE PHYSICAL ENVELOPE
• NEAREST OBSTACLE AND/OR OBSTACLE POSITIONED WITHIN THE
FLIGHT PATH HIGHTEST PRIORITY
DETECTION AND CLASSIFICATION
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

DETECTION AND CLASSIFICATION
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
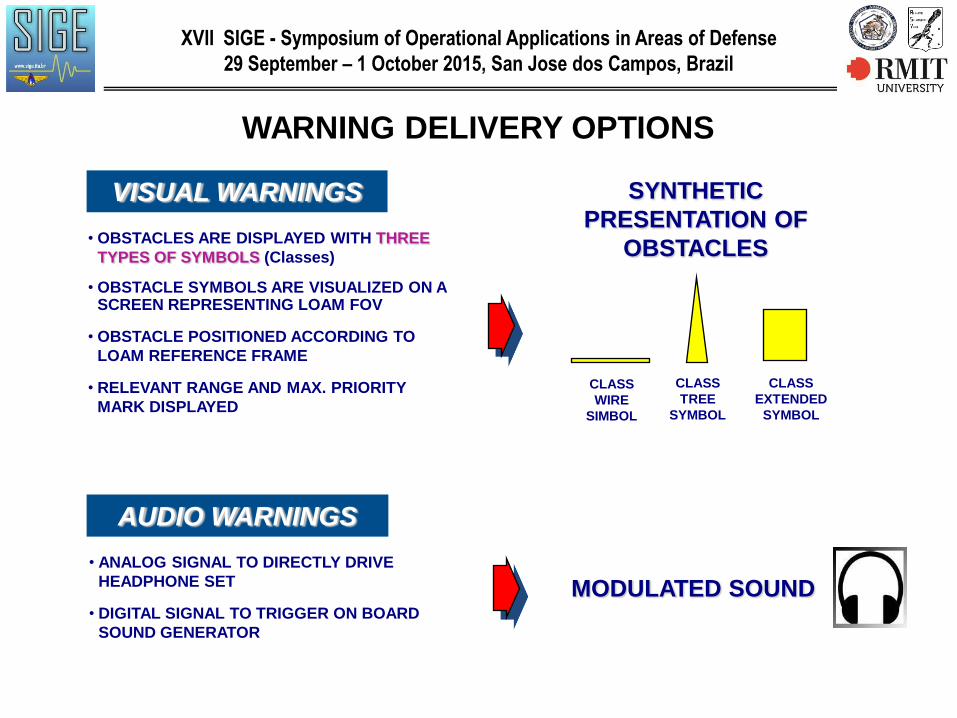
VISUAL WARNINGS
• OBSTACLES ARE DISPLAYED WITH THREE
TYPES OF SYMBOLS (Classes)
• OBSTACLE SYMBOLS ARE VISUALIZED ON A SCREEN REPRESENTING LOAM FOV
• OBSTACLE POSITIONED ACCORDING TO
LOAM REFERENCE FRAME
• RELEVANT RANGE AND MAX. PRIORITY
MARK DISPLAYED
AUDIO WARNINGS
• ANALOG SIGNAL TO DIRECTLY DRIVE
HEADPHONE SET
• DIGITAL SIGNAL TO TRIGGER ON BOARD
SOUND GENERATOR
CLASS
WIRE
SIMBOL
CLASS
EXTENDED
SYMBOL
CLASS
TREE
SYMBOL
MODULATED SOUND
SYNTHETIC
PRESENTATION OF
OBSTACLES
WARNING DELIVERY OPTIONS
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

70º 70°
40°
70°
Scenario (Altitude)
Manned
operations Autonomous operations
Nominal Pilot (AC 90-48c)
Auto LOS BLOS
Low 2.5 0.5 1 1.5
Medium 3.5 1 2 2.5
High 4.0 1 2.5 3
DETECTION RANGE (NM)
FAA Requirements
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
UAV INTEGRATION ARCHITECTURE

DISPLAY OPTIONS
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
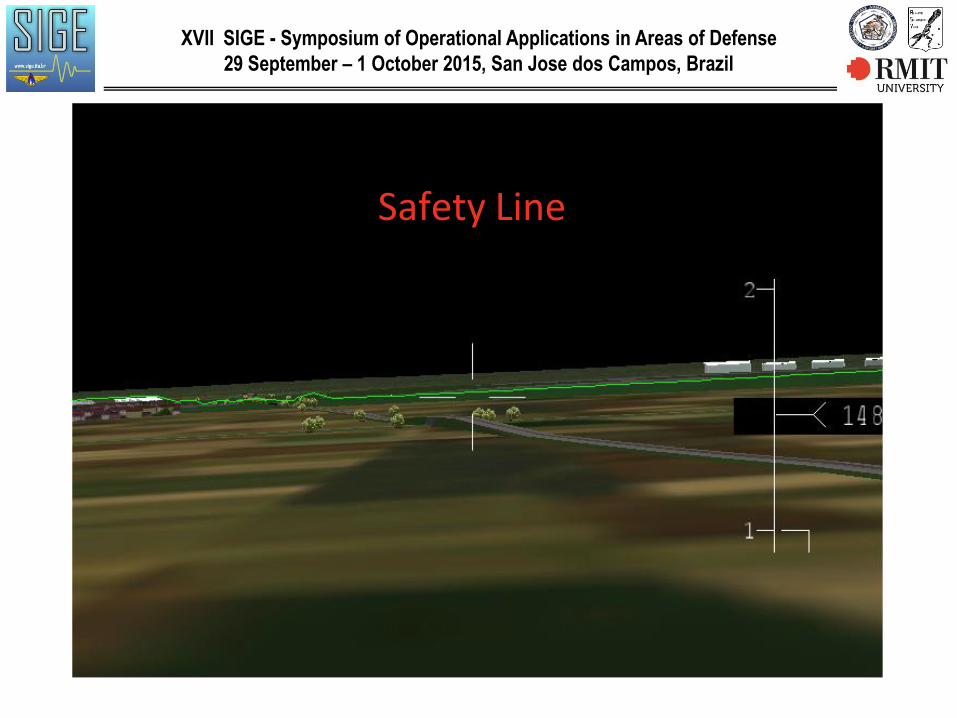
Safety Line
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
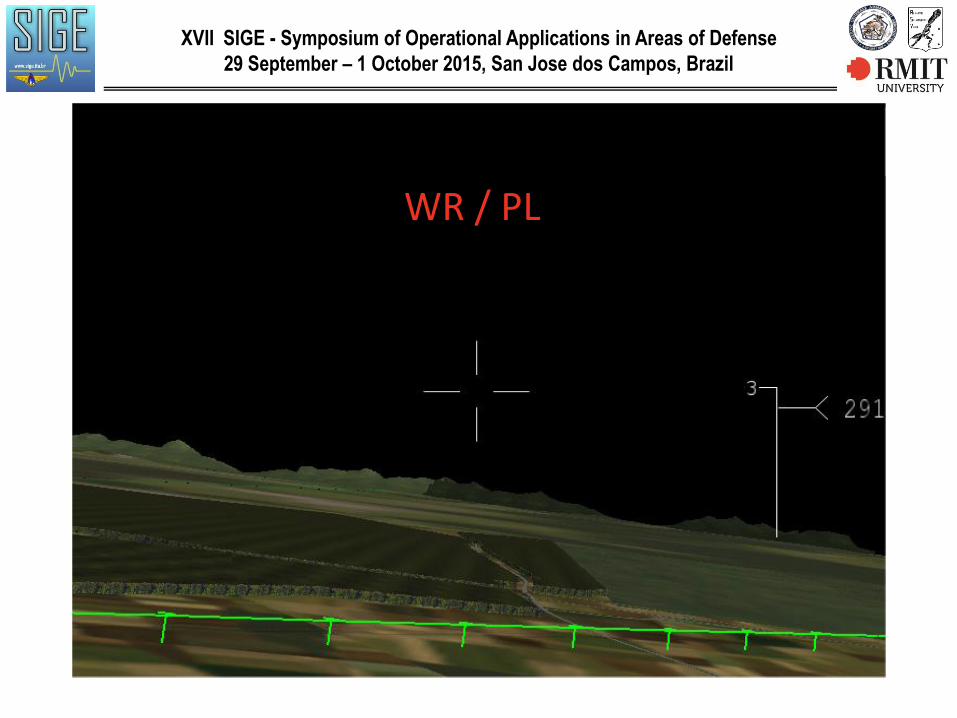
WR / PL
DISPLAY OPTIONS
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
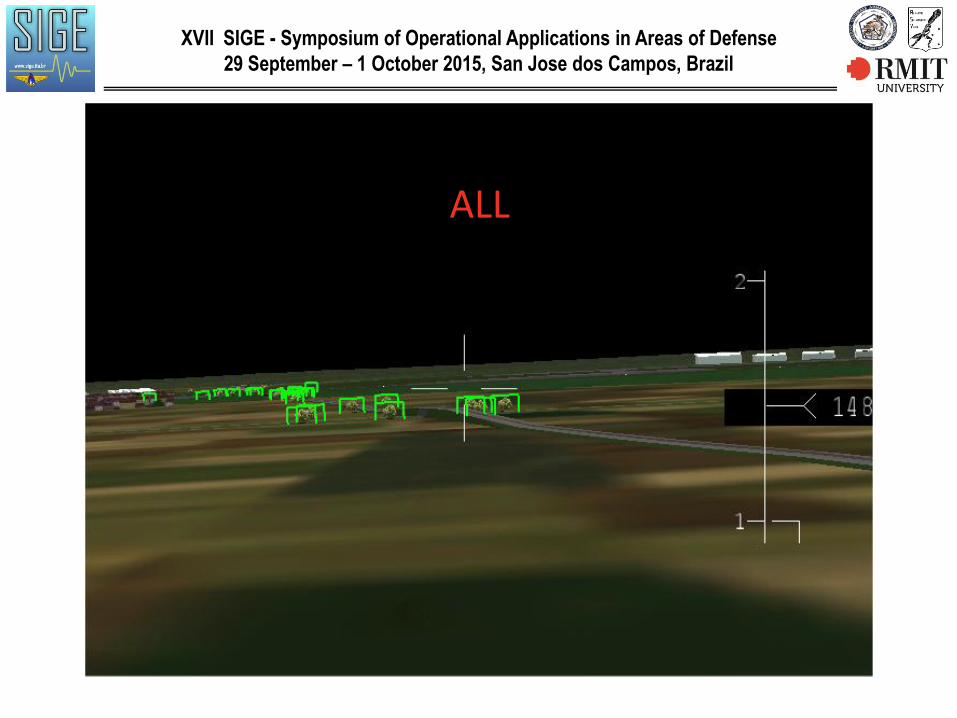
ALL
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
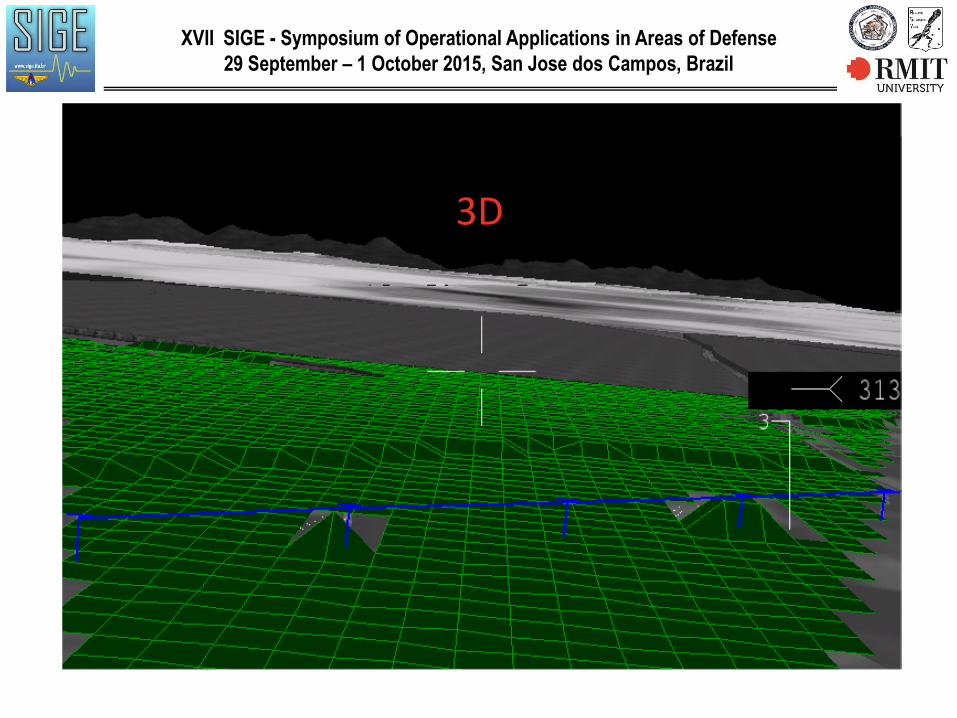
3D
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
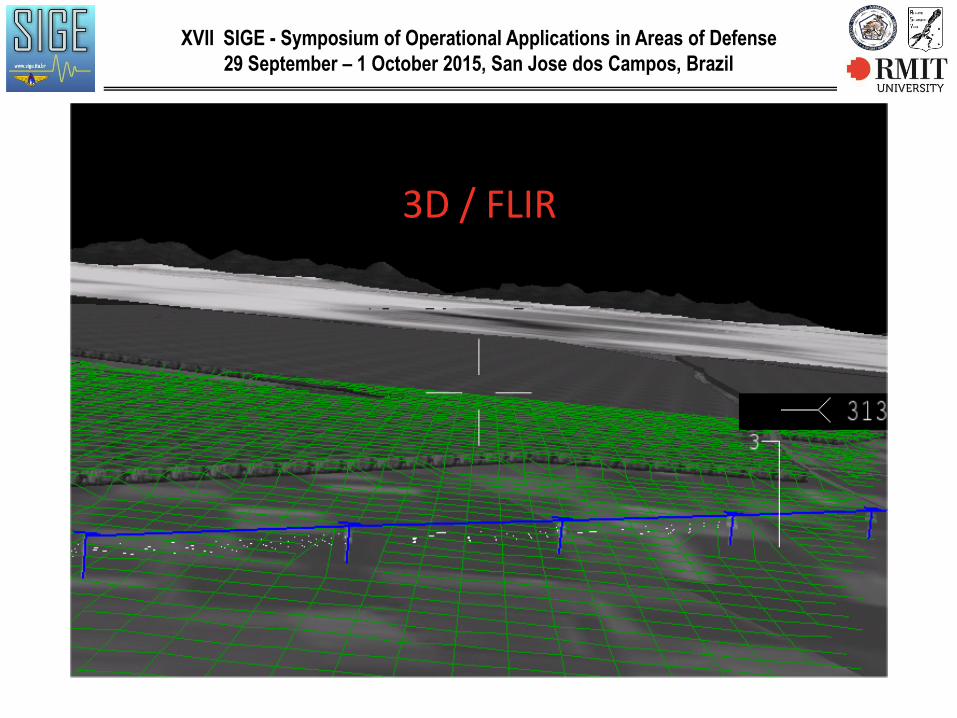
3D / FLIR
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
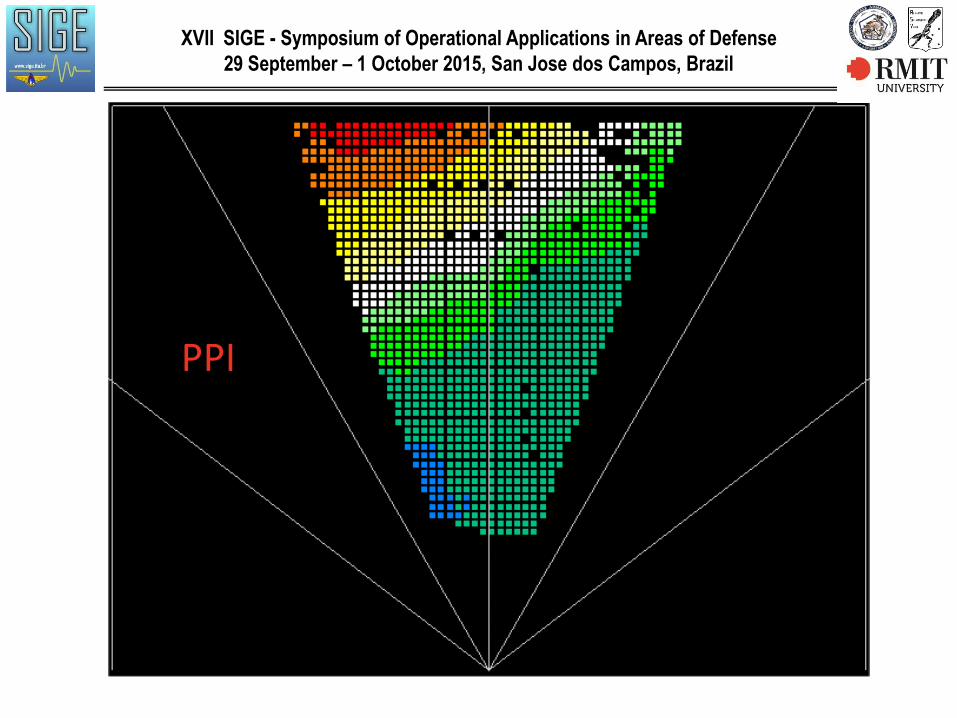
PPI
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
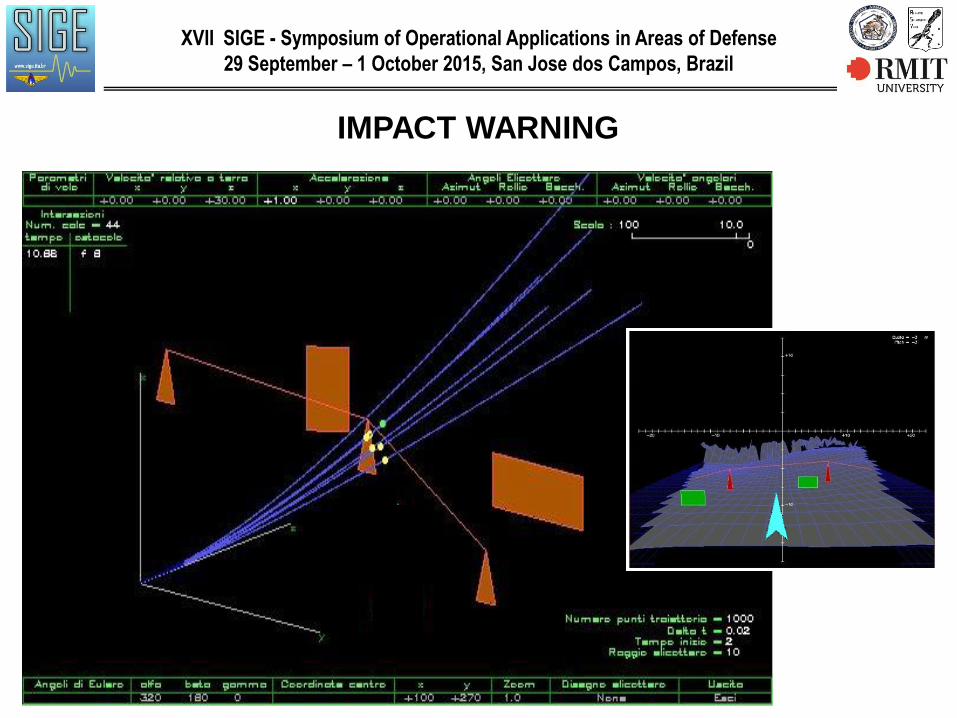
IMPACT WARNING

COMMUNICATION LINES (MIL-BUS-1553B, RS422 SERIAL LINK, ARINC 429)
• OBSTACLE INFORMATION TRANSMISSION Obstacle Class, Priority, Position (Az , El & Distance
according to LOAM reference system, useful for evasive manoeuvre)
• SYSTEM STATUS TRANSMISSION
• EXTERNAL COMMANDS RECEIVE
AUTO TEST FUNCTIONS
• POWER ON BIT: AUTOMATICALLY ACTIVATED ON POWER ON
• INTERRUPTIVE BIT: ACTIVATED ON PILOT’S REQUEST
• CONTINUOUS BIT: PERIODICALLY EXECUTED DURING NORMAL OPERATION CBIT
IBIT
• VIDEO OUTPUT FLIR with obstacle symbols superimposed available
COMMS & AUTO-TEST
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

DISPLAY
UNIT
INHIBIT
LASER EMISSION
RETURN ECHOES
HEAD SET
POWER SUPPLY
POWER SUPPLY CONTROL
PANEL UNIT
SENSOR UNIT
e.g., NH300
INTEGRATION
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

DISPLAY
UNIT
INHIBIT
LASER EMISSION
RETURN ECHOES
HEAD SET
POWER SUPPLY
POWER SUPPLY CONTROL
PANEL UNIT
SENSOR UNIT
IMU
ARINC 429
e.g., AB212/AB412 and Small UAV
PTHROUGH DL IN UAV
INTEGRATION (2)
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

INHIBIT
POWER SUPPLY
MISSION BUS 1553B
CWG
MFD
MC IRS
AR
INC
429
EWS FLIR RS422 (PROVISION)
e.g., EH101 and UAV
LASER EMISSION
RETURN ECHOES
DISPLAY
UNIT
CONTROL
PANEL UNIT
THROUGH DATALINK IN UAV
SENSOR UNIT
INTEGRATION (3)
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
INHIBIT
LASER EMISSION
RETURN ECHOES
POWER SUPPLY
MISSION BUS 1553B
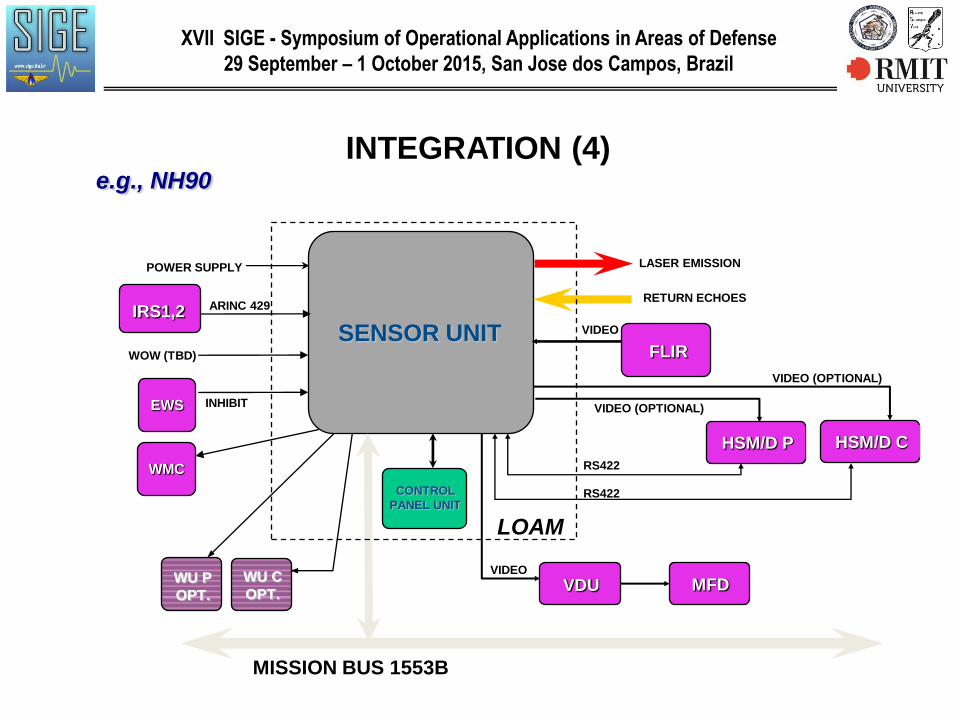
WMC
MFD
LOAM
SENSOR UNIT IRS1,2
EWS
CONTROL
PANEL UNIT
HSM/D P HSM/D C
VIDEO (OPTIONAL)
VIDEO (OPTIONAL)
ARINC 429
RS422
RS422
VDU VIDEO
WU P
OPT.
WU C
OPT.
WOW (TBD)
e.g., NH90
FLIR
VIDEO
INTEGRATION (4)
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

LOAM FOV Centre
Platform Instantaneous
Direction of Flight
Platform axis
HMI OPTIMISATION
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

Altimetric Format
2-D Format
Platform
Instantaneous
Direction of Flight
HMI2 Optimization

DETECTION PERFORMANCE M&S and TEST
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

MINIMUM DETECTION PERFORMANCE ANASYSIS
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

GROUND TEST
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

Clear Weather Rain
V=10km V=12.5km V=15km Light Medium Heavy
SNRP 4.90104 4.95104 5.02104 3.14104 1.83104 1.45104
SNRE 3.35104 3.80104 4.27104 2.87104 2.47104 2.13104
Predicted and Measured Signal-to-Noise Ratios
NEPDRRP
deLLAESNR
D
W
R
rTrp
2
24
EP = output laser pulse energy
A = receiver aperture
LT = transmission losses (including beam shaping)
Lr = reception losses (including optical filter)
= atmospheric extinction coefficient
dW = wire diameter
= wire reflectivity
PD = pulse duration
R = obstacle range
= beam divergence
D = initial beam diameter
NEP = noise equivalent power
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

Display Unit
(for test)
Control Panel Unit
Sensor Head Unit
NH-300
FLIGHT TEST
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
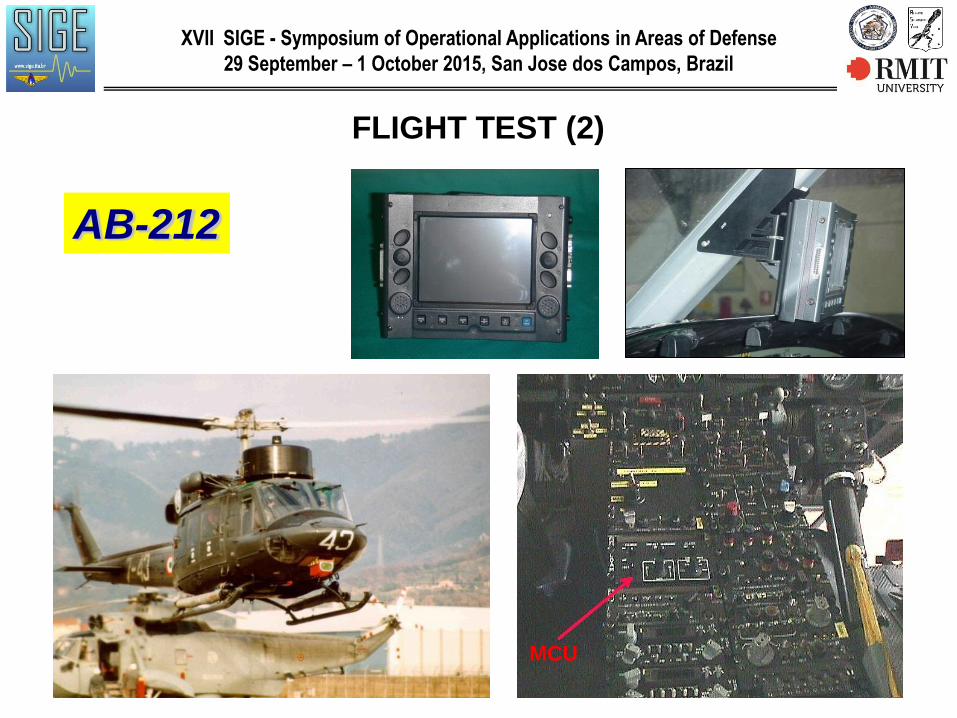
MCU
AB-212
FLIGHT TEST (2)
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
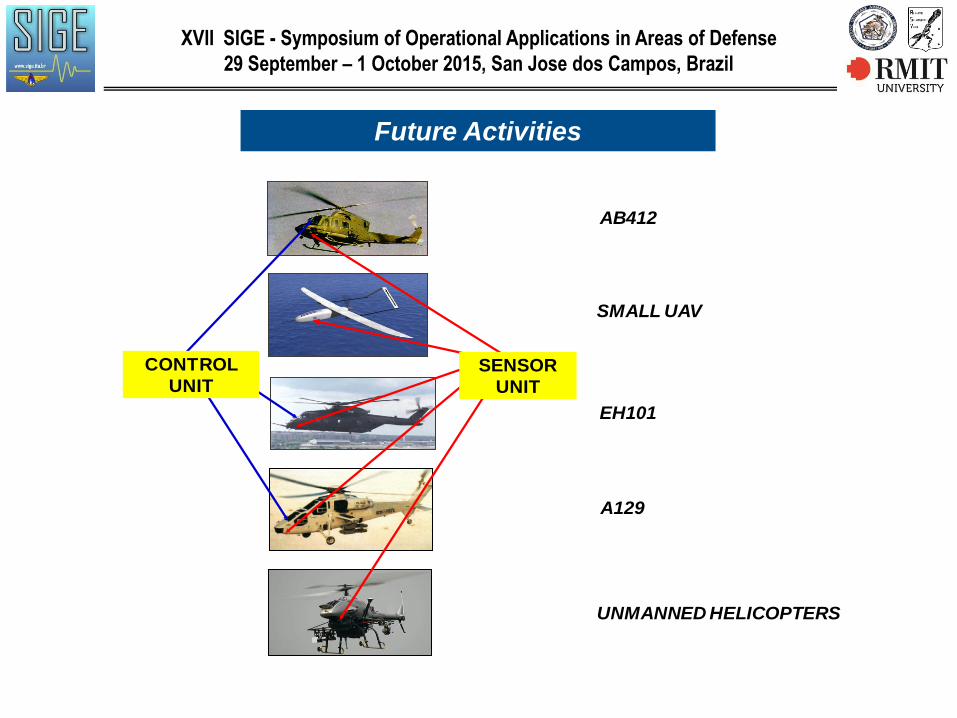
AB412
EH101
A129
SMALL UAV
UNMANNED HELICOPTERS
SENSOR
UNIT
CONTROL
UNIT
Future Activities
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
We have presented the activities carried out for integrating the Convertible Laser Designation Pod and GBU-16/GBU-24 Laser Guided Bombs on the TORNADO-IDS.
A new tailored test philosophy was adopted, consisting in a continuous interaction between ground test, flight test and simulation.
Extensive use of simulation tools allowed a full aerodynamics and safe-separation investigation, weapon aiming analysis, masking characterisation, preliminary performance estimation, laser hazards determination and laser/ballistic safety assessment.
The adopted test philosophy, introduced considerable improvements in the data gathering and analysis activities, reducing costs and saving time. Therefore an increase of efficiency was experienced, with consequent optimisation of the overall development process.
FINAL REMARKS
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

• Laser Obstacle Detection & Collision Avoidance is a mature
technology for low-to-mid dynamics platforms
• The LOAM systems was successfully integrated on various
helicopters and is been tested on UAVs
• A number of low, medium and high-level avionics integration
architectures have been developed
• HMI2 aspects were deeply investigated both in manned and
unmanned configurations
• Ground and flight test activities validated the obstacle
detection, classification and avoidance algorithms
• Future activities will address additional manned and unmanned
aircraft applications with mid-to-high dynamics
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
FINAL REMARKS (cont.)

Airborne Lasers and Integrated Weapon
Systems: Design, Development,
Test and Evaluation
INVITED PLENARY SPEACH
Questions and Discussion

[1] R. Sabatini and M. A. Richardson, RTO AGARDograph AG-300 Vol. 26: Airborne Laser Systems Testing
and Analysis: NATO Science and Technology Organization, 2010.
[2] R. Sabatini, "Tactical Laser Systems Performance Analysis in Various Weather Conditions", presented at
the E-O Propagation, Signature and System Performance under Adverse Meteorological Conditions
Considering Out of Area Operations, Sensors and Electronics Technology (SET) panel, NATO Research
and Technology Organization (RTO), Naples, Italy, 1998.
[3] R. Sabatini and G. B. Palmerini, RTO AGARDograph AG-160 Vol. 21: Differential Global Positioning
System (DGPS) for Flight Testing: NATO Research and Technology Organization, 2008.
[4] R. Sabatini, F. Guercio, and S. Vignola, "Airborne Laser Systems Performance Analysis and Mission
Planning", in RTO-MP-46 - Advanced Mission Management and Systems Integration Technologies for
Improved Tactical Operations, Systems Concepts and Integration (SCI) panel, NATO Research and
Technology Organization (RTO), Florence, Italy, 1999.
[5] R. Sabatini, F. Guercio, G. Campo, and A. Marciante, "Laser Guided Bombs and Convertible Designation
Pod Integration on Italian TORNADO-IDS", presented at the 31st Annual Symposium of the Society of
Flight Test Engineers, Turin, Italy, 2000.
[6] R. Sabatini, F. Guercio, G. Campo, and A. Marciante, "Simulation and Flight Testing for Integration of a
Laser Designation Pod and Laser Guided Bombs on Italian TORNADO-IDS", in RTO-MP-083 -
Integration of Simulation with System Testing, Systems Concepts and Integration (SCI) panel, NATO
Research and Technology Organization (RTO), Toulouse, France, 2001.
[7] R. Sabatini and M. A. Richardson, "A new approach to eye-safety analysis for airborne laser systems
flight test and training operations", Optics and Laser Technology, vol. 35, pp. 191-198, 2003. DOI:
10.1016/S0030-3992(02)00171-8
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
[8] R. Sabatini, L. Aulanier, H. Rutz, M. Martinez, L. Foreman, B. Pour, et al., "Multifunctional information
distribution system (MIDS) integration programs and future developments", in proceedings of IEEE
Military Communications Conference 2009 (MILCOM2009), Boston, MA, 2009. DOI:
10.1109/MILCOM.2009.5379806
[9] R. Sabatini and M. A. Richardson, "Novel atmospheric extinction measurement techniques for aerospace
laser system applications", Infrared Physics and Technology, vol. 56, pp. 30-50, 2013. DOI:
10.1016/j.infrared.2012.10.002
[10] T. Elder and J. Strong, "The infrared transmission of atmospheric windows", Journal of the Franklin
Institute, vol. 255, pp. 189-208, 1953
[11] R. M. Langer, "Report on Signal Corps Contract No. DA-36-039-SC-72351", 1957.
[12] W. E. K. Middleton, "Vision through the Atmosphere", University of Toronto Press1952.
[13] American National Standard Institute ANSI Z136.1, “Safe Use of Laser”, 1976.
[14] American National Standard Institute ANSI Z136.4, “Laser Safety Measurements and Instrumentation”,
1990.
[15] STANAG 3606 - 5th ed., "Evaluation and Control of Laser Hazards", 1991.
[16] International Electrotechnical Commission IEC 825 – (Amendment 2), “Radiation Safety of Laser
Products, Equipment Classification, Requirements and User’s guide”, 1993.
[17] Italian Regulation DL 04.12.1992 - n. 475, “Attuazione della direttiva 89/686/CEE relativa ai dispositivi di
protezione individuale”, 1992.
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

[18] Italian Standard CEI - 76/2 - 2nd ed., "Apparecchi Laser - Sicurezza delle Radiazioni, Classificazione dei
Materiali, prescrizioni e Guida per l'Utilizzatore", 76/2 - ed. II, 1993.
[19] Italian Military Safety Standard SMD-W-001 - 2nd ed., “Regolamento Interforze di Sicurezza per l’Impiego
degli Apparti Laser”, 1995.
[20] UK Ministry of Defence – Ordnance Board D/OB/2407/2, JSP390 – Military Laser Safety, 1998.
[21] R. Sabatini and M. A. Richardson, "Innovative methods for planetary atmospheric sounding by lasers", in
proceedings of AIAA Space 2008 Conference, San Diego, CA, USA, 2008. DOI: 10.2514/6.2008-7670
[22] R. Sabatini, M. A. Richardson, H. Jia, and D. Zammit-Mangion, "Airborne laser systems for atmospheric
sounding in the near infrared", in proceedings of SPIE 8433, Laser Sources and Applications, Photonics
Europe 2012, Brussels, Belgium, 2012. DOI: 10.1117/12.915718
[23] A. Gardi and R. Sabatini, "Unmanned aircraft bistatic lidar for CO2 colum density determination", in
proceedings of IEEE Metrology for Aerospace Conference 2014, Benevento, Italy, 2014
[24] R. Sabatini, E. Roviaro, and M. Cottalasso, "Development of a Laser Collision Avoidance System for
Helicopters: Obstacle Detection/Classification and Calculation of Alternative Flight Paths", in RTO-MP-
092 - Complementarity of Ladar and Radar, Sensors & Electronics Technology (SET) panel, NATO
Research and Technology Organization (RTO), 2002.
[25] R. Sabatini, A. Gardi, and M. A. Richardson, "LIDAR Obstacle Warning and Avoidance System for
Unmanned Aircraft", International Journal of Mechanical, Industrial Science and Engineering, vol. 8, pp.
62-73, 2014
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
[26] R. Sabatini, A. Gardi, S. Ramasamy, and M. A. Richardson, "A laser obstacle warning and avoidance
system for manned and unmanned aircraft", in proceedings of IEEE Metrology for Aerospace
Conference 2014, Benevento, Italy, 2014
[27] R. Sabatini, C. Bartel, A. Kaharkar, and T. Shaid, "Design and integration of vision based sensors for
unmanned aerial vehicles navigation and guidance", in proceedings of SPIE 8439, Optical Sensing and
Detection II, Photonics Europe 2012, Brussels, Belgium, 2012. DOI: 10.1117/12.922776
[28] R. Sabatini, M. A. Richardson, M. Cantiello, M. Toscano, P. Fiorini, H. Jia, et al., "Night Vision Imaging
Systems design, integration and verification in military fighter aircraft", in proceedings of SPIE 8439,
Optical Sensing and Detection II, Photonics Europe 2012, Brussels, Belgium, 2012. DOI:
10.1117/12.915720
[29] R. Sabatini, C. Bartel, A. Kaharkar, T. Shaid, L. Rodriguez Salazar, D. Zammit-Mangion, et al., "Low-cost
navigation and guidance systems for unmanned aerial vehicles - part 1: vision-based and integrated
sensors", Annual of Navigation, vol. 19, pp. 71-98, 2012. DOI: 10.2478/v10367-012-0019-3
[30] R. Sabatini, S. Ramasamy, A. Gardi, and L. Rodriguez Salazar, "Low-cost sensors data fusion for small
size unmanned aerial vehicles navigation and guidance", International Journal of Unmanned Systems
Engineering, vol. 1, pp. 16-47, 2013. DOI: 10.14323/ijuseng.2013.11
[31] R. Sabatini, M. A. Richardson, M. Cantiello, M. Toscano, and P. Fiorini, "A novel approach to night vision
imaging systems development, integration and verification in military aircraft", Aerospace Science and
Technology, 2014. DOI: 10.1016/j.ast.2013.08.021
[32] R. Sabatini, C. Bartel, A. Kaharkar, T. Shaid, and S. Ramasamy, "Navigation and Guidance System
Architectures for Small Unmanned Aircraft Applications", International Journal of Mechanical, Industrial
Science and Engineering, vol. 8, pp. 733-752, 2014
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

[33] L. Rodriguez Salazar, R. Sabatini, A. Gardi, and S. Ramasamy, "A Novel System for Non-Cooperative
UAV Sense-and-Avoid", in proceedings of European Navigation Conference 2013 (ENC2013), Vienna,
Austria, 2013
[34] S. Ramasamy, R. Sabatini, and A. Gardi, "Avionics Sensor Fusion for Small Size Unmanned Aircraft
Sense-and-Avoid", in proceedings of IEEE Metrology for Aerospace Conference 2014, Benevento, Italy,
2014
[35] R. Sabatini, T. Moore, and C. Hill, "A new avionics-based GNSS integrity augmentation system: Part 1 -
Fundamentals", Journal of Navigation, vol. 66, pp. 363-384, 2013. DOI: 10.1017/S0373463313000027
[36] R. Sabatini, T. Moore, and C. Hill, "A new avionics-based GNSS integrity augmentation system: Part 2 -
Integrity flags", Journal of Navigation, vol. 66, pp. 501-522, 2013. DOI: 10.1017/S0373463313000143
[37] R. Sabatini, T. Moore, and C. Hill, "Avionics-based integrity augmentation system for mission- and
safety-critical GNSS applications", in proceedings of 25th International Technical Meeting of the Satellite
Division of the Institute of Navigation 2012, (ION GNSS 2012), Nashville, TN, 2012, pp. 743-763
[38] K. Chircop, D. Zammit-Mangion, and R. Sabatini, "Bi-objective pseudospectral optimal control
techniques for aircraft trajectory optimisation", in proceedings of 28th Congress of the International
Council of the Aeronautical Sciences 2012 (ICAS2012), Brisbane, Australia, 2012, pp. 3546-3555
[39] W. Camilleri, K. Chircop, D. Zammit-Mangion, R. Sabatini, and V. Sethi, "Design and validation of a
detailed aircraft performance model for trajectory optimization", in proceedings of AIAA Modeling and
Simulation Technologies Conference 2012 (MST2012), Minneapolis, MN, USA, 2012. DOI:
10.2514/6.2012-4566
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

[40] S. Ramasamy, R. Sabatini, A. Gardi, and Y. Liu, "Novel flight management system for real-time 4-
dimensional trajectory based operations", in proceedings of AIAA Guidance, Navigation, and Control
Conference 2013 (GNC2013), Boston, MA, USA, 2013. DOI: 10.2514/6.2013-4763
[41] R. Sabatini, “Performance Prediction and Flight Testing of Tactical Laser Systems.” 1st NATO Tactical
Leadership Program (TLP) Conference. Invited Plenary Paper. Florenne (Belgium), January 2000.
[42] R. Sabatini, “Aviation Electro-Optical Sensor Systems.” Chosun University. Gwangju (South Korea),
October 2013.
[43] R. Sabatini, “Avionics RADAR and Electro-Optical Sensor Systems." Cranfield University Tutorial.
Cranfield (United Kingdom), March 2013.
[44] R. Sabatini, “Airborne Laser Systems Performance Modelling, Safety Analysis and flight Testing.” Italian
Air Force Production Test Pilot School Seminar. Rome (Italy), May 2006.
[45] R. Sabatini, “Laser Beam Propagation in the Atmosphere – Flight Test and Remote Sensing
Applications.” University of Rome “La Sapienza” and ITAF Research and Flight Test Centre Seminar.
Rome (Italy), February 2005.
[46] R. Sabatini, “Innovative Infrared Non-destructive Test (IR-NDT) Techniques.” University of Rome “La
Sapienza” Research Seminar. Rome (Italy), February 2004.
[47] R. Sabatini, “Laser Systems Safety Analysis for Airborne Applications: Mathematical Models and
Simulation Results.” University of Rome "La Sapienza" and ITAF Research and Flight Test Centre
Seminar. Rome (Italy), May 2001.
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

[48] R. Sabatini. “Mathematical Models and Simulation Results for Eye-safe Laser Attacks and Test/Training
Missions Planning with High Power/Low Divergence Ground Laser Systems.” Technical Report – ITAF
Research and Flight Test Centre (CSV-RSV). 2005.
[49] R. Sabatini. “Laser Beam Propagation in the Atmosphere – Flight Test and Remote Sensing
Applications.” Research Report – ITAF Research and Flight Test Centre. 2005.
[50] R. Sabatini. “AMX Night Vision Goggles (NVG) Compatible Systems Development: Final Report for the
Certification Authorities.” Technical Report – ITAF Research and Flight Test Centre (CSV-RSV). 2004.
[51] R. Sabatini, I. Bruni and E. Pederzolli. “AMX Night Vision Goggles (NVG) Compatible Systems
Development: Ground and Flight Test Campaign.” Test Report – ITAF Research and Flight Test Centre
(CSV-RSV). 2004.
[52] R. Sabatini, I. Bruni and F. Martiradonna. “AMX Night Vision Goggles (NVG) Compatible Systems
Development: NVG/Helmet, Cockpit and External Lights Modifications.” Technical Report – ITAF
Research and Flight Test Centre (CSV-RSV). 2003.
[53] R. Sabatini. “Development and Initial Ground/Flight Test of the SELEX-COMMUNICATIONS Laser
Obstacle Warning System (LOAS) Technology Demonstrator.” Technical Report – ITAF Research and
Flight Test Centre (CSV-RSV). 2003.
[54] R. Sabatini. “Developed of a Laser Test Range for the Italian Air Force: Design, Development, Test and
Evaluation – Final Report.” Technical Report – ITAF Research and Flight Test Centre (CSV-RSV).
2003.
[55] R. Sabatini, A. Pellegrini and M. Locatelli. “Operational Test and Evaluation of the MB-339CD (Full
Digital) Avionics and Armament Systems – Final Operational Clearance (FOC) Version.” ITAF Research
and Flight Test Centre (CSV-RSV). 2002.
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
[56] R. Sabatini and E. Dati. “Laboratory Experimental Activities with Near Infrared Cameras, Integrating
Spheres, Piro-electric Probe Sensors and the SELEX-Communications RALM-01 Laser Warning
Receiver to Support the Development of the PILASTER Laser Test Range.” Technical Report – ITAF
Research and Flight Test Centre (CSV-RSV/RC). 2002.
[57] R. Sabatini and M. Locatelli. “MB-339CD Night Vision Imaging System (NVIS) Development:
Operational Requirements and Viable Technical Solutions.” Technical Report – ITAF Research and
Flight Test Centre (CSV-RSV). 2002.
[58] R. Sabatini. “TORNADO-ECR Night Vision Goggles (NVG) Compatible Systems Development: Final
Report for the Certification Authorities.” Technical Report – ITAF Research and Flight Test Centre (CSV-
RSV). 2001.
[59] R. Sabatini, M. Toscano and M. Cantiello. “TORNADO-ECR Night Vision Goggles (NVG) Compatible
Systems Development: Ground and Flight Test Campaign.” Test Report – ITAF Research and Flight Test
Centre (CSV-RSV). 2001.
[60] R. Sabatini and F. Martiradonna. “TORNADO-ECR Night Vision Goggles (NVG) Compatible Systems
Development: NVG/Helmet, Cockpit and External Lights Modifications.” Technical Report – ITAF
Research and Flight Test Centre (CSV-RSV). 2001.
[61] R. Sabatini, F. Guercio and S. Vignola. “Laser Systems Safety Analysis for Airborne Applications:
Mathematical Models and Simulation Results.” Technical Report - ITAF Research and Flight Test Centre
(CSV-RSV). 2001.
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

[62] R. Sabatini. “Developed of a Laser Test Range for the Italian Air Force: Laser Systems Performance
Prediction, Safety Analysis and Hardware/Software Developments.” Technical Report – ITAF Research
and Flight Test Centre (CSV-RSV). 2001.
[63] R. Sabatini and E. Dati. “Construction of a Near Infrared Laser Scatterometer and Laboratory
Measurements of the Bidirectional Reflectance Distribution Function (BRDF) of Various Materials and
Paints.” Technical Report – ITAF Research and Flight Test Centre (CSV-RSV/RC). 2000.
[64] R. Sabatini, F. Simei, M. Vitale and P. Cuppone. “Integration of the Convertible Laser Designation Pod
(CLDP) on the TORNADO-IDS Aircraft with Advanced System SW TORNADO ADA (ASSTA) version 1.”
Flight Test Report – ITAF Research and Flight Test Centre (CSV-RSV). 2000.
[65] R. Sabatini. “Developed of a Laser Test Range for the Italian Air Force: Definition of the Operational
and Technical Requirements.” Technical Report – ITAF Research and Flight Test Centre (CSV-RSV).
1999.
[66] R. Sabatini, M. Vitale, M. Mutti and P. Cuppone. “TORNADO-IDS Night Vision Goggles (NVG)
Compatible Systems Development: Ground and Flight Test Campaign.” Test Report – ITAF Research
and Flight Test Centre (CSV-RSV). 1999.
[67] R. Sabatini, M. Vitale and F. Martiradonna. “TORNADO-IDS Night Vision Goggles (NVG) Compatible
Systems Development: NVG/Helmet, Cockpit and External Lights Modifications.” Technical Report –
ITAF Research and Flight Test Centre (CSV-RSV). 1999.
[68] R. Sabatini, S. Vignola and F. Guercio. “Mathematical Models and Simulation Tools for Eye-safe Laser
Attacks and Test/Training Missions Planning with Airborne Laser Systems.” Technical Report – ITAF
Research and Flight Test Centre (CSV-RSV). 1998.
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil

[69] R. Melosi and R. Sabatini. “Laboratory Measurements of PAVEWAY Laser Guided Bomb Seeker-heads
Minimum Detectable Power Densities.” Technical Report – ITAF Research and Flight Test Centre (CSV-
RSV/RC). 1997.
[70] R. Sabatini. “Mathematical Models for Calculating the Range Performance of the THALES-Optronics
Convertible Laser Designation Pod (CLDP) in Various Operational Scenarios and Weather Conditions.”
Technical Report – ITAF Research and Flight Test Centre (CSV-RSV). 1995.
[71] Kneizys F.X., Shuttle E.P., Abreau L.W., Chetwynd J.H., Anderson G.P., Gallery W.O., Selby J.E.A., and
Clough S.A., “Users Guide to LOWTRAN 7”. Air Force Geophysical Laboratory Report AFGL-TR-88-
0177. Hansom AFB (MA). 1988.
[72] Hudson R.D., “Infrared Systems Engineering”. Wiley & Sons. 1969.
[73] Strohbehn J.W. et al., “Laser Beam Propagation in the Atmosphere“. Topics in Applied Physics Series –
Vol. 25. Sprienger-Verlag. 1978.
[74] Keith G.G., Otten L. J., and Rose W.C., “Aerodynamic Effects”. ERIM-SPIE IR&EO Systems Handbook
(Vol. 2 – Chapter 3). Second Printing. 1996.
[75] La Rocca A.J. and Turner R.E., “Atmospheric Transmittance and Radiance: Methods of Calculations”.
Environmental Research Institute of Michigan Ann Arbor. 1975.
[76] Weichel H., “Laser Beam Propagation in the Atmosphere”. SPIE Optical Engineering Press. Second
Printing. 1990.
[77] Langer R.M., Signal Corps Report n° DA-36-039-SC-72351. May 1957.
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil
[78] R. Sabatini, M. A. Richardson, A. Gardi and S. Ramasamy, “Airborne Laser Sensors and Integrated
Systems.” Progress in Aerospace Sciences. 2015.
[79] R. Sabatini, F. Cappello, S. Ramasamy, A. Gardi and R. Clothier, “An Innovative Navigation and
Guidance System for Small Unmanned Aircraft using Low-Cost Sensors.” Aircraft Engineering and
Aerospace Technology, 2015.
[80] F. Cappello, R. Sabatini, S. Ramasamy, "Low-Cost Multi-Sensor Data Fusion for Unmanned Aircraft
Navigation and Guidance." In press, Journal of Science and Engineering Investigations, Vol. 4, Issue
43, August 2015.
[81] A. Gardi and R. Sabatini, " Design and Development of a Novel Bistatic DIAL Measurement System for
Aviation Pollutant Concentrations." International Journal of Science and Engineering Investigations, Vol.
4, Issue 41, June 2015. http://www.ijsei.com/papers/ijsei-44115-10.pdf
[83] R. Sabatini, A. Gardi and S. Ramasamy, “A Laser Obstacle Warning and Avoidance System for
Unmanned Aircraft Sense-and-Avoid.” Applied Mechanics and Materials, Vol. 629, pp. 355-360, October
2014. DOI: 10.4028/www.scientific.net/AMM.629.355
[84] A. Gardi, R. Sabatini and S. Ramasamy, “Bistatic LIDAR System for the Characterisation of Aviation-
Related Pollutant Column Densities.” Applied Mechanics and Materials, Vol. 629, pp. 257-262, October
2014. DOI: 10.4028/www.scientific.net/AMM.629.257
References
XVII SIGE - Symposium of Operational Applications in Areas of Defense
29 September – 1 October 2015, San Jose dos Campos, Brazil