ananthasuresh, iisc, dec. 2013nacomm2013.org/cmpart1.pdfananthasuresh, iisc, dec. 2013...
TRANSCRIPT

Ananthasuresh, IISc, Dec. 2013
G.K. AnanthasureshandAll the current and past members of the M2D2 LaboratoryMechanical EngineeringIndian Institute of ScienceBangalore
Motion without Hinges and Sliders
1

Ananthasuresh, IISc, Dec. 2013
G.K. AnanthasureshandAll the current and past members of the M2D2 LaboratoryMechanical EngineeringIndian Institute of ScienceBangalore
Mobility, Analysis, and Synthesis
2

Compliant mechanisms
Rigid-body mechanisms
Equivalent compliant mechanism
Int. J. Solids and Structures44(2007), pp. 6279-6298With Jiten Patel

Ananthasuresh, IISc, Dec. 2013
Smooth transition
Rigid closed chain
Rigid serial chain
Elastic chain

Ananthasuresh, IISc, Dec. 2013
Kinematic pairs
Rigid bodies
Elastic segments
Elastic pairs
rigid chains
elastic chains

Ananthasuresh, IISc, Dec. 2013
Kinematic pairs
• Lower pairs with surface contact
– Revolute (hinge-1 dof)• Surface of revolution
– Prismatic (slider-1 dof)• Prismatic surface
– Helical (screw-1 dof)
– Cylindrical (2 dof)
– Toroidal (2 dof)
– Spherical (ball-socket-3 dof)
– Planar (3 dof)
• And there are many, many higher pairs with line or point contact
Specific shapes
for contact
surfaces

Ananthasuresh, IISc, Dec. 2013
Elastic pairsNo specific
shape
Elastic 1-dof rotational pairs
Elastic 1-dof sliding pairs
Elastic 2-dof rotational pairs
WithAshwin RaoSantosh Bhargav

Ananthasuresh, IISc, Dec. 2013
1-dof rotational
elastic pairs
More than a dozen shapes for 1-dof elastic rotational pairs!
Bendix elastic rotational pair
Ananthasuresh, IISc, Dec. 2013
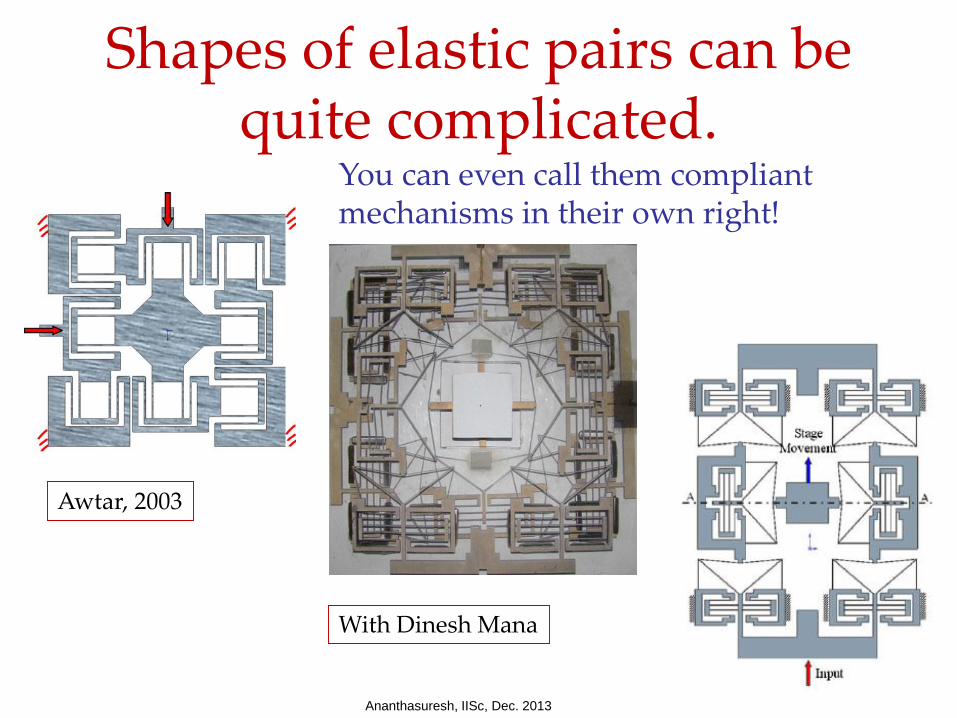
Shapes of elastic pairs can be quite complicated.
You can even call them compliant mechanisms in their own right!
With Dinesh Mana
Awtar, 2003

Ananthasuresh, IISc, Dec. 2013
Distinguishing pairs quantitatively
Kinematic
• Ideally…– Zero stiffness along
or about the intended axis.
– Infinite stiffness along or about all other five axes.
– Almost no cross-axis errors.
• Friction and backlash cause deviation from the ideal condition.
Elastic
• Ideally and realistically…– Finite but low stiffness along or
about the intended axis.
– Finitely large stiffness along or about all other five axes.
– Finite cross-axis errors
• Friction and backlash are absent.
• Viscoelastic behavior may cause deviations.
• Axis may drift.

Ananthasuresh, IISc, Dec. 2013
Multi-axis stiffness of an elastic pair
xx xy xz x x x
yy yz y y y
zz z z z
xx
yy
zz
x
y
z
k k k k k k
k k k k k
k k k k
k k k
k
Fu
F
Fu
M
k
u
k
M
M
Ku f
Elastic deformation analysis, analytical or numerical, via the compliance matrix can be used to compute K.

Ananthasuresh, IISc, Dec. 2013
Computing the multi-axis compliance matrix
1
xx xy xz x x x x x
y yyy
z z
x
y
yz y y y
zz z
z
z z
c c c c c c
c c c c c
c c c c
c c c
c c
F u
F u
F u
M
c
M
M
K C
Up to six analysis runs…Three finite element analysis runs in 2D.Six finite element analysis runs in 3D.

Ananthasuresh, IISc, Dec. 2013
No joints (pairs) at all
AnchoredForce
Displacement
A compliant mechanism with elastic segments
Distributed complianceNo elastic pairs.Uniformly distributed deformation.Large displacement with small strain.Stronger than elastic pairs.Enhanced scope for design.
Elastic segments instead of elastic pairs.
Ananthasuresh, IISc, Dec. 2013
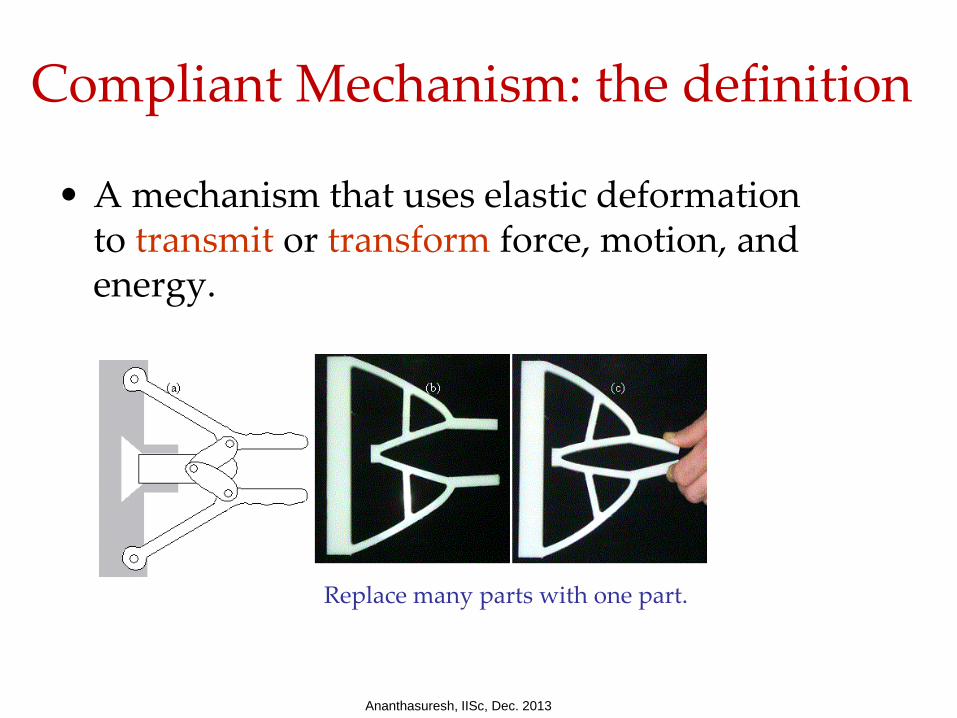
Compliant Mechanism: the definition
• A mechanism that uses elastic deformation to transmit or transform force, motion, and energy.
Replace many parts with one part.

Ananthasuresh, IISc, Dec. 2013
Transmission is fine;transformation?
Change
• Amplify force or motion
• Change direction
• Change the dynamics
• Change state
Transduce
• Convert non-mechanical energy into mechanical energy and vice versa.
• Smart or active materials
With Moulton
WithAnupam Saxena and LuzhongYin

Ananthasuresh, IISc, Dec. 2013
And then there is semantics!
Compliant
Accommodating
Acquiescent
Agreeable
Amenable
Complaisant
Non-resistant
Obedient
Obliging
Yielding
…
Deformable
Elastic
Flexible
Lithe
Limber
Lissome
Pliable
Pliant
Supple
…
Two connotations and one concept

Ananthasuresh, IISc, Dec. 2013
A picture is worth 1000 words!
Steven Vogel, Discover, May 1995
Tension leg platform
Compliant offshore structuresBar-Avi and Benaroya, 1998
Being compliant and strong is an equally, if not more, attractive alternative to beingstiff and strong.
Platform
Pontoon
Co
lum
n

Ananthasuresh, IISc, Dec. 2013
The importance of being compliant
http://www.fao.org/docrep/006/x8234e/x8234e08.htm
How wheat plants avoid “lodging” by being compliant.
Struct Multidisc
Optm’n (2009)
39:327–336
WithP. Sivanagenrda

Ananthasuresh, IISc, Dec. 2013
Monolithic (uni-body; single-piece) construction
• Ease of manufacture – reduced or no assembly
Ananthasuresh and Saggere, 1994
Elastic pairElastic segment

Ananthasuresh, IISc, Dec. 2013
Tune your stiffness as needed.
By adding intermittent contacts, stiffness can be changed.
We call them contact-aided compliant mechanisms.
WithNilesh Mankame

Ananthasuresh, IISc, Dec. 2013
Tuning stiffness…
Gripper + bistable mechanism =>
Stiffness reduction + discerning specimen’s stiffness
F
uout
Soft gripper
with negative stiffness
WithSantosh Bhargav and Gaurav Singh
Ananthasuresh, IISc, Dec. 2013
One inside the other…multi-scale graspers
WithNandan Maheswari
Ananthasuresh, IISc, Dec. 2013
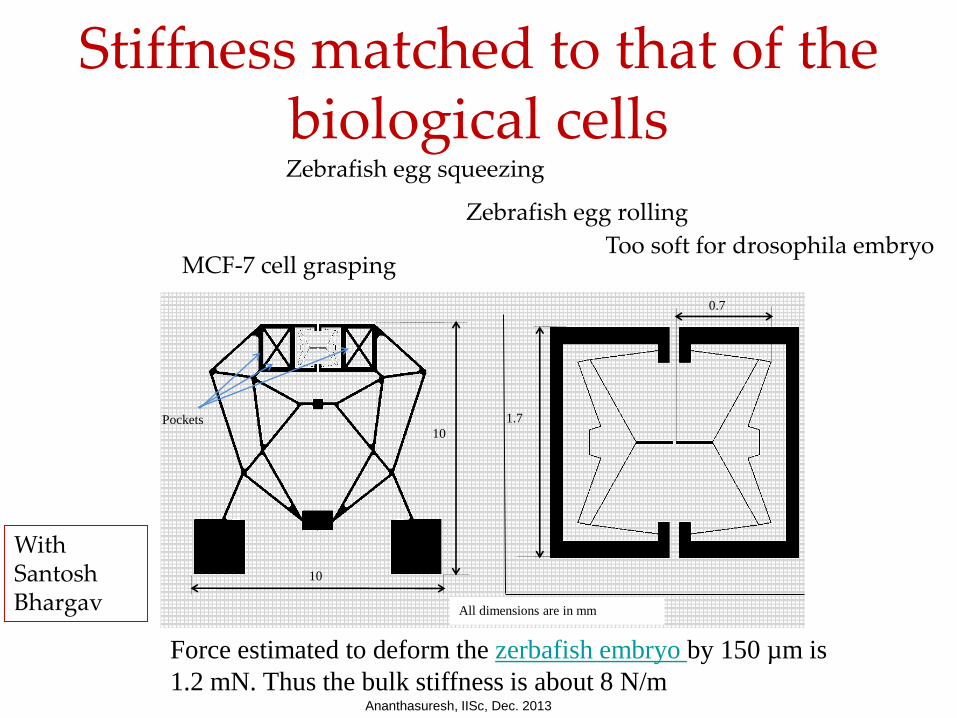
Stiffness matched to that of the biological cells
Force estimated to deform the zerbafish embryo by 150 µm is
1.2 mN. Thus the bulk stiffness is about 8 N/m
All dimensions are in mm
10
10
1.7
0.7
Pockets
Zebrafish egg squeezing
Zebrafish egg rolling
Too soft for drosophila embryoMCF-7 cell grasping
WithSantosh Bhargav

Ananthasuresh, IISc, Dec. 2013
Tuning stiffness… by combining
Gripper + DaCM =>
Stiffness tuning + GA
Contact
points
Pulling
mechanism
Compliant
clamp
Suspension
beams
Stretch too…
WithSantosh Bhargav

Ananthasuresh, IISc, Dec. 2013
Composite compliant mechanisms
FaCM + DaCM => MA + GA
Crush cement blocks and measure breaking force.
WithSantosh Bhargav
Ananthasuresh, IISc, Dec. 2013
Don’t they break?
But flexibility does not imply the lack of strength.
And, rigidity does not imply strength either!
• Ease of manufacture – reduced or no assembly
• Ability to withstand overloads –“I bend but I break not.”
Yes, they do…like all others that are not designed well.
It is a question of choosing the right material and having a suitable design.

Ananthasuresh, IISc, Dec. 2013
Flexibility and shape
Cut a spiral in an acrylic sheet and pull up the centre. This shows that flexibility is a matter of design.

Ananthasuresh, IISc, Dec. 2013
No more rubbing the wrong way
Input force
Output motion
• Ease of manufacture – reduced or no assembly
• Ability to withstand overloads –“I bend but I break not.”
• Less or no friction and wear
• No backlash problem – more precision
Prefer hinges to sliders,flexures to either.- M. J. French

Ananthasuresh, IISc, Dec. 2013
Is compliant design difficult?
• Some people think so. It may be because…
– you need to deal with elastic deformation.
– you need to deal with elastic pairs and elastic segments as opposed to discrete rigid bodies.
• It is in fact easy once we pay attention to…
– what benefits we can achieve with deformation
– deformation mechanics in addition to kinematics

Ananthasuresh, IISc, Dec. 2013
Is compliant design new? No, it isn’t.
We find them all around in simple products.
Nature has been using them for a long time!
An ancient compliant mechanism

Ananthasuresh, IISc, Dec. 2013
One-piece clothes peg holds clothes in gales!
Imagine a clothes peg which:. Is a single moulded item. Has no metal parts to rust. No wood to stain clothes. Will not break, made of polypropylene. Grips your clothes even in gales
This BRITISH product which is UNIQUE in design has a POWERFUL integral spring action. Being made in 100% PLASTIC they are totally RUST FREE
Up to 3 times stronger than metal sprung pegs.From the product description…
Ananthasuresh, IISc, Dec. 2013
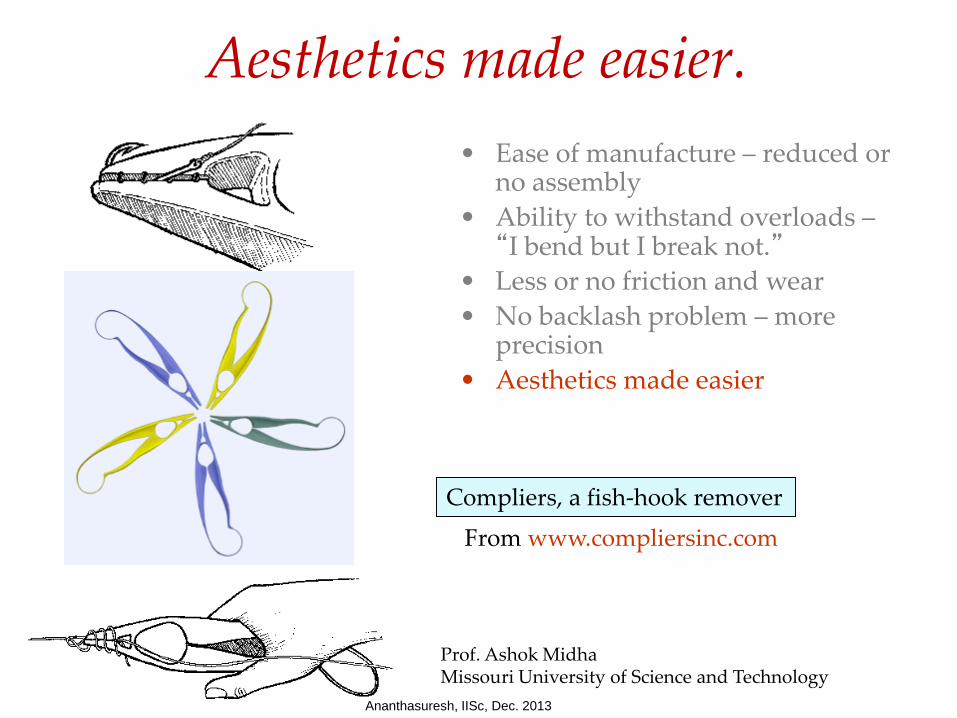
Aesthetics made easier.
From www.compliersinc.com
Prof. Ashok MidhaMissouri University of Science and Technology
Compliers, a fish-hook remover
• Ease of manufacture – reduced or no assembly
• Ability to withstand overloads –“I bend but I break not.”
• Less or no friction and wear
• No backlash problem – more precision
• Aesthetics made easier

Ananthasuresh, IISc, Dec. 2013
Which one will you buy?
Audrey
Preo
Tweezerman
Beautyimpex

Ananthasuresh, IISc, Dec. 2013
Real applications• Ease of manufacture – reduced or
no assembly
• Ability to withstand overloads –“I bend but I break not.”
• Less or no friction and wear
• No backlash problem – more precision
• Aesthetics made easier
• Economy of material and less cost for better performance
Prof. Larry HowellBrigham Young University
Over-running and one-way clutches
Gahring and Ananthasuresh

Ananthasuresh, IISc, Dec. 2013
Mission-adaptive compliant wings
Prof. Sridhar Kota, University of Michigan
Ananthasuresh, IISc, Dec. 2013
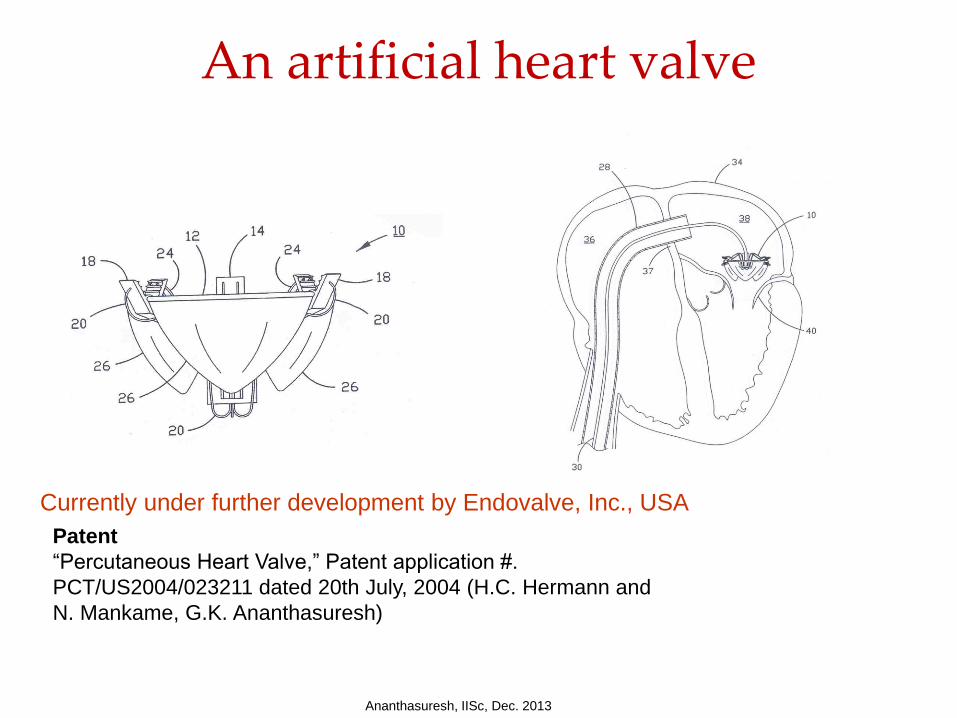
Currently under further development by Endovalve, Inc., USA
Patent
“Percutaneous Heart Valve,” Patent application #.
PCT/US2004/023211 dated 20th July, 2004 (H.C. Hermann and
N. Mankame, G.K. Ananthasuresh)
An artificial heart valve
Ananthasuresh, IISc, Dec. 2013
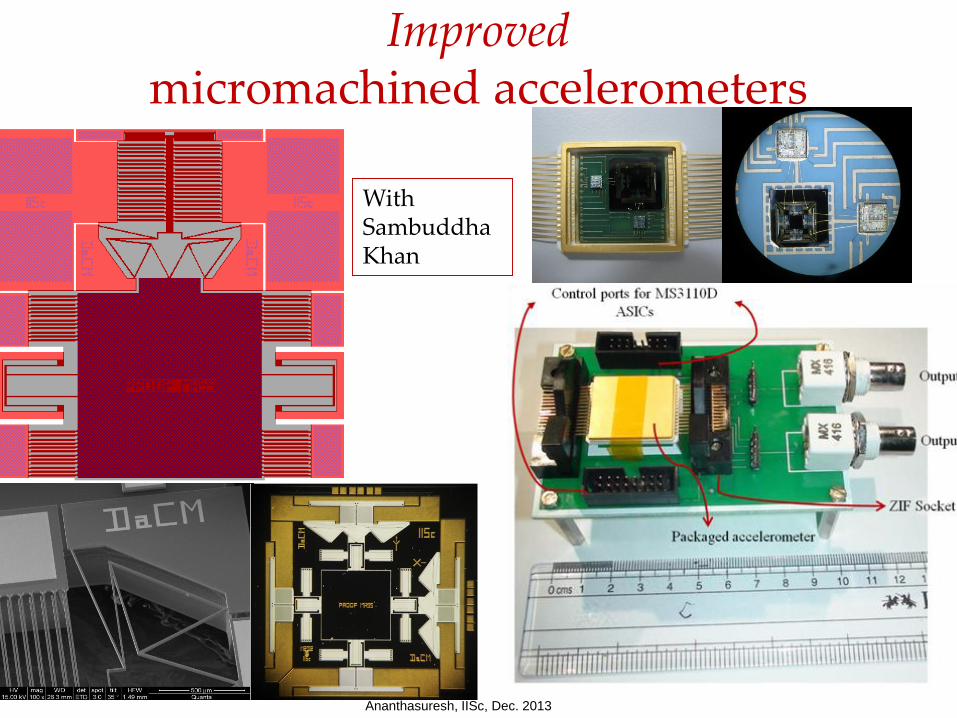
Improved micromachined accelerometers
WithSambuddha Khan

Ananthasuresh, IISc, Dec. 2013
External pipe-crawler
A compact ring-actuator
Inchworm concept
WithPuneet Singh et al.

Ananthasuresh, IISc, Dec. 2013
Micron: a force sensor
Output
Input
Deformation analysis
Evaluation: effective stiffness of 26.N/m or
2.6uN /um
~2 mN resolution~ 1 mN range
Baichapur, Bhargav, Gulati, Maheswari, and Ananthasureh, 2012

Ananthasuresh, IISc, Dec. 2013
These are good wheels!
Tweel from Michelin.Non-pneumatic tire from IISc.
ME project report, G. Bhargav, 2008.

Ananthasuresh, IISc, Dec. 2013
Almost any type of motion
• Displacement amplification
• Curved paths
• Non-smooth paths
• Frequency tuning
• Constant-force
• Actuator characteristic modification
• Etc.
• Ease of manufacture – reduced or no assembly
• Ability to withstand overloads –“I bend but I break not.”
• Less or no friction and wear
• No backlash problem – more precision
• Aesthetics made easier
• Economy of material and less cost for better performance
• Any type of motion
Ananthasuresh, IISc, Dec. 2013
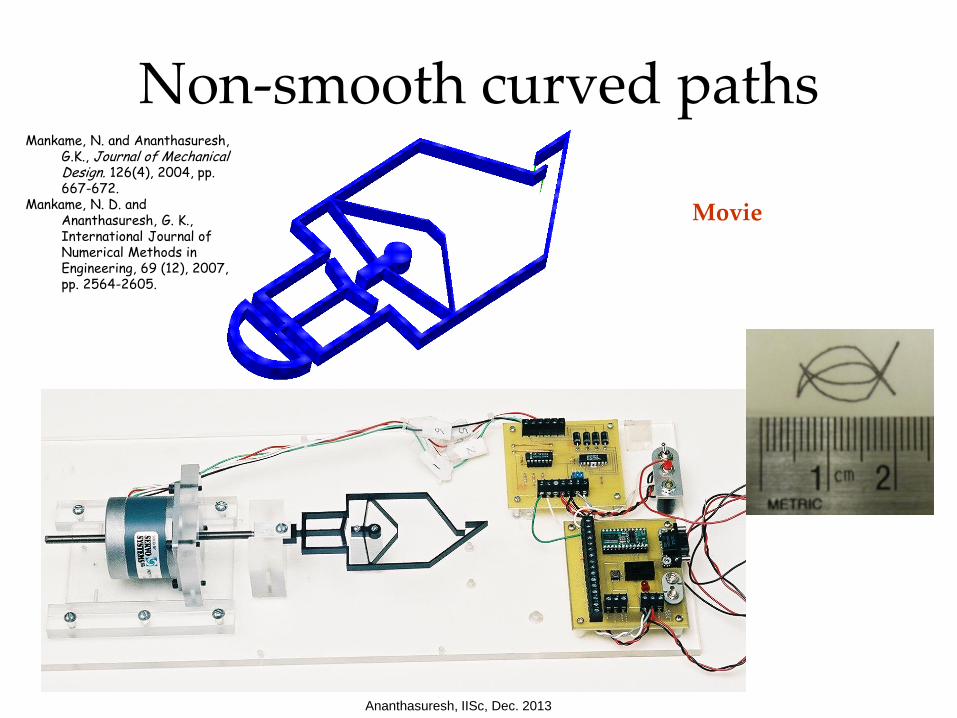
Non-smooth curved pathsMankame, N. and Ananthasuresh,
G.K., Journal of Mechanical Design. 126(4), 2004, pp. 667-672.
Mankame, N. D. and Ananthasuresh, G. K., International Journal of Numerical Methods in Engineering, 69 (12), 2007, pp. 2564-2605.
Movie
Ananthasuresh, IISc, Dec. 2013
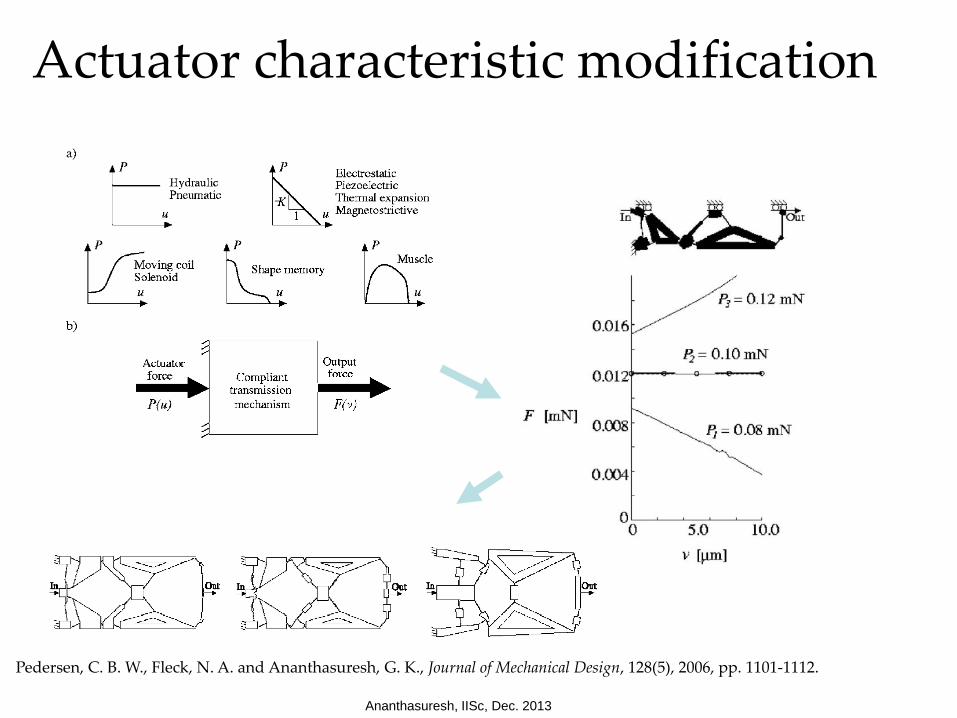
Actuator characteristic modification
Pedersen, C. B. W., Fleck, N. A. and Ananthasuresh, G. K., Journal of Mechanical Design, 128(5), 2006, pp. 1101-1112.

Ananthasuresh, IISc, Dec. 2013
Signal processing−band-pass filter

Ananthasuresh, IISc, Dec. 2013
Micromechaical signal processors
• Band-pass filters
• Switches and relays
• Amplifiers
• Frequency-translators
• Clocks
Output side
input side
WithSambuddha Khan and Nirmit Dave

Ananthasuresh, IISc, Dec. 2013
Size no bar!• Ease of manufacture – reduced or
no assembly
• Ability to withstand overloads –“I bend but I break not.”
• Less or no friction and wear
• No backlash problem – more precision
• Aesthetics made easier
• Economy of material and less cost for better performance
• Any type of motion
• Suitable for any size
Micromachined accelerometer

Ananthasuresh, IISc, Dec. 2013
Miniature grippers
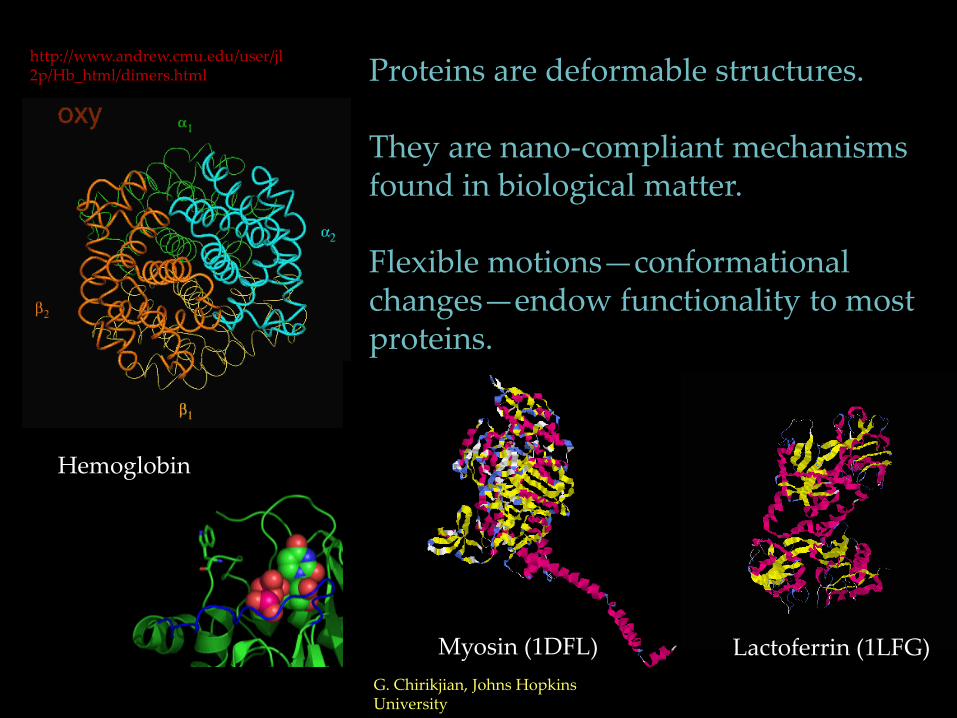
Proteins are deformable structures.
They are nano-compliant mechanisms found in biological matter.
Flexible motions—conformational changes—endow functionality to most proteins.
Myosin (1DFL)
Hemoglobin
Lactoferrin (1LFG)
http://www.andrew.cmu.edu/user/jl2p/Hb_html/dimers.html
G. Chirikjian, Johns Hopkins University

Ananthasuresh, IISc, Dec. 2013
3D too…

Ananthasuresh, IISc, Dec. 2013
Small CMs with steel
Shishira Nagesh, summer intern from NIT-Surathkal

Ananthasuresh, IISc, Dec. 2013
Miniature metal gripper
Fourth stage on spark erosionTop view
of the punch
Punched out of spring steel sheet.
Journal of Manufacturing Processes 15 (2013) 108–114With Rakesh Pathk and Ravi Kumar

Ananthasuresh, IISc, Dec. 2013
Meta-materials• Ease of manufacture – reduced or
no assembly
• Ability to withstand overloads –“I bend but I break not.”
• Less or no friction and wear
• No backlash problem – more precision
• Aesthetics made easier
• Economy of material and less cost for better performance
• Any type of motion
• Suitable for any size
• Amenable for non-mechanical actuation
• Material microstructure design
(Almgren, 1982)
(Made by Hsu using MIT’s wafer bonding, 1996)

Ananthasuresh, IISc, Dec. 2013
Negative thermal expansion coefficient
(Sigmund, Denmark Technical University)

Ananthasuresh, IISc, Dec. 2013
Are there any disadvantages to compliant mechanisms?
Ananthasuresh, IISc, Dec. 2013
Efficiency and mechanical advantage compromised!
2 2
in outin in out out
in in out out
out out in in
out in
in out in out
r c
F FW F F
F F
SE
F F SE
F SE
F F
MA MA MA
More about it in a paper
(Salamon and Midha, 1998)

Ananthasuresh, IISc, Dec. 2013
Static balancing: why?
Professor Just Herder, Delft University, The Netherlands

Ananthasuresh, IISc, Dec. 2013
Static balancing of a compliant mechanism
With Amrit Hansogi and Sanagemsh Deepak

Ananthasuresh, IISc, Dec. 2013
High speed motion
• Too many cycles
• Too low a frequency
• Nonlinear inertial effects
• Parametric resonance
• Viscoelastic effects
Ananthasuresh, IISc, Dec. 2013
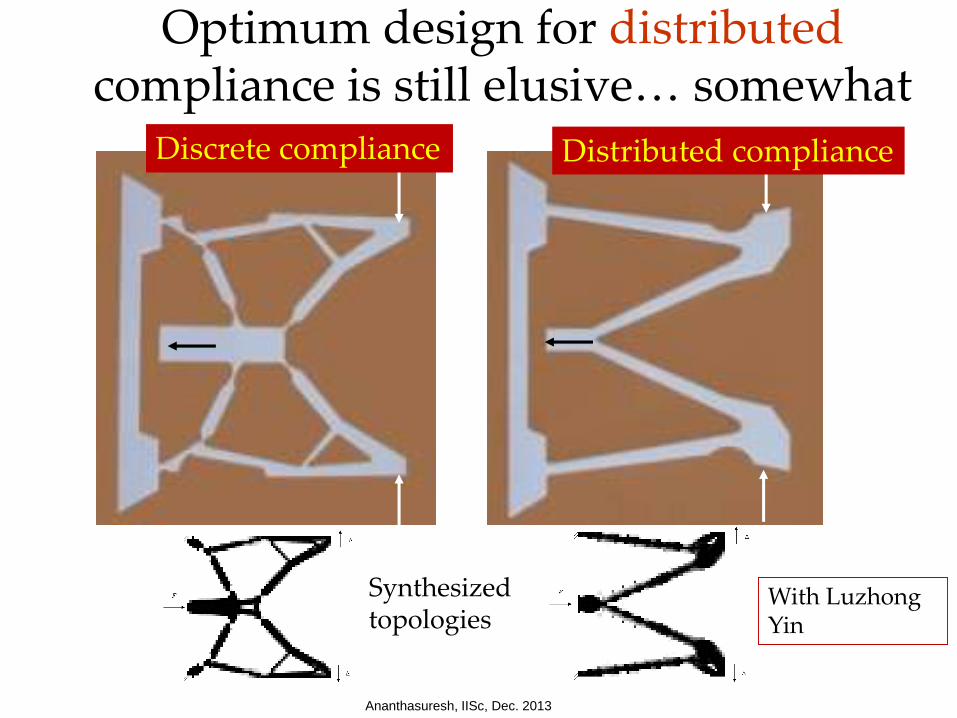
Optimum design for distributedcompliance is still elusive… somewhat
Discrete compliance Distributed compliance
Synthesized topologies
With Luzhong Yin

Ananthasuresh, IISc, Dec. 2013
Prefer hinges to sliders,flexures to either.
Prefer hinges to sliders,flexures to either,distributed compliance to all.
M. J. French

Ananthasuresh, IISc, Dec. 2013
Compliant utopia
• Distributed compliance
– Geometry Uniform geometry.
– Kinematics Equal deformation.
– Stress Evenly stressed.
• Helical spring is a good candidate.
Ananthasuresh, IISc, Dec. 2013
Multi-disciplinary and Multi-scale Device and Design Lab

Ananthasuresh, IISc, Dec. 2013
Look, Sci-Walker with compliant legs!
Pulkit Kapur, summer intern in IISc.

Ananthasuresh, IISc, Dec. 2013
PhD studentsA Narayana Reddy
Sourav Rakshit Sudarshan Hegde
Sangamesh Deepak RSambuddha KhanSantosh Bhargav
Sudhanshu SekharKiran AkellaBiplab Sarkar
T. J. Ramnath BabuNandhini Nehru
Shantanu ChakravarthyAnasuya DigheG. vasundhara
Sreenath BalakrishnanM. S. Suma
Administrative AssistantsT. S. DeepaT. Bharath K. Bindhu
Faculty CollaboratorsAshitava Goshal (ME)H.S.Jamdagni (CEDT)Navakanta Bhat (ECE)
Saraswathi Vishveshwara(MBU)
K.J.Vinoy (ECE)Saumitra Das (MRDG)
G. Mohan Rao (ISU)C. S. Jog (ME)
Utpal Nath (MCB)
Multi-disciplinary and Multi-scale Device and Design Lab
SponsorsDST, BRNS,
NPOL, ADA,
NPSM, DRDO, ISRO, SBMT,
NPMASS, and
industries.
Thank you!
Project staffG. Balaji, Shantanu
Chakravarthy, B. Manjunath, M. S. .
Deepika, B. K. Deepthi, P. Dinesh, B. Pradeep, A.
Singh, A. Alwan, M. Kulkarni, R. Ganesh, K. Girish, Siddharth Sanan,
K. Manjunath, Vinod Kumar, Vedanandan, A. Ravi Kumar, Manoj Raj,
Chetan Kumar, G. Ramu, Duely Rakshit, Vijay Prakash, G. Ramu, A. Sajeesh Kumar, M. S.
Suma, Meenakshi Sundaram, Vishwaman Malaviya, R. Genesh,
Krishna Pavan, B. Varun, Mukund Madhav Nath,
Puneet Singh, Shilpa, Ashwin Rao, Gaurah
Singh, Gautham Kumar, Gautham Baichapur,
Nikhil Jorapur, Avinash Kumar, Kunal Patil.
Masters studentsGirish KrishnanV. S. S. Srinivas
M. DineshShyam Madhavan
Harish VarmaJagdish SinghSaurabh Mitta
Saurav RakshitP. Sivanagendra
Manish AgrawalM. Rajesh
Deepak SahuG. Bhargav
P. Mallikarjuna RaoPadmanabh Limaye
Meenakshi SundaramPakeeruraju Podugu
Subhajit BenerjeeNirmit DaveGaurav Nair
Rakesh PathakNavaneet Krishna
P. SandeepMohit Mathur