astronauts and robots 2015: mike gernhardt, nasa
TRANSCRIPT

National Aeronautics and Space Administration
Human Exploration of Phobos
Mike Gernhardt PhD.Nasa JSC

Human Spaceflight Architecture Mars Moons Team
• Paul Abell • Andrew Abercromby• Charles Allton• Paul Bielski• Dan Brit• Steve Chappell• Bryan Cloyd• David Coan• Zack Crues• Dan Dexter• Mike Gernhardt• Bill Harris• A. Scott Howe• Steve Hoffman• Sharon Jefferies
• Dina Poncia• David Reeves• Mike Wright• Michelle Rucker• Greg Schmidt• Bill Todd• Pat Troutman• Matt Simon• Larry Toups
• James Johnson• Dave Lee• Pascal Lee• Harry Litaker• Stan Love• Mark Lupisella• Dan Mazanek• Natalie Mary• Fay McKinney• Gabe Merrill• Nathan Moore• Rob Mueller• Tom Percy• Tara Polsgrove• Jason Poffenberger

Phobos/Deimos Human Missions
Phobos27x22x18 km
Deimos15x12x10 km
Human Architecture TeamTask 7C: Mars Moons

Mars Moons - Introduction
• Mars’ moons are interesting scientifically and potentially offer engineering, operational, and public engagement benefits that could enhance subsequent mars surface operationso Mars moons interesting in themselves and would also likely provide
insights into the evolution of Marso Multiple scientific benefits: 1) Moons of Mars, 2) possibly captured
asteroids 3) likely contains Mars surface materials 4) likely collection of materials from asteroid belt 5) near-zero latency tele-operation of Mars surface assets
o Potentially an affordable and productive first-step towards eventual Mars surface operations
• Provides significant radiation protection • Phobos and Deimos are both interesting exploration destinationso With current imagery, we know Phobos is interesting because of craters
and fissures etc. It is also the driving transportation case and therefore the focus of this study
o We are formulating a precursor mission that would look at both moons

Maximum Vertical Jump – 650 lb. Suited Crew (crew + suit + jetpack)
Apollo 16 – John Young’s Jump Salute
Weight on Phobos lbfCrewmember in a Suit 0.3SEV (6,000 kg) 7.7Habitat (15,000 kg) 19.2Lander (50,000 kg) 63.9
Time of Flight Moon 2.5 sec.Phobos 11.7 min.Deimos 22.2 min.
Moon
Phobos
Deimos
0.0
200.0
400.0
600.0
800.0
1.2
350.9
666.7
Maximum Vertical Jump w/
2 m/s Take-Off Veloc-ity
Verti
cal H
eigh
t (m
)
5

Mars Moons Trade Tree Based on Campaign Team & Transportation Team Recommendations &
Discussions
Destinations
Phobos Only
Deimos Only
Phobos + Deimos
Mars Moon Habitat
Phobos / Deimos Surface
Static
Relocatable
Phobos Parking Orbit
L1
L4 / L5
DRO
Pre-Staged Assets
None
Mars Moon Habitat
Mars Moon Habitat
+ PEV(s)
Transportation
Loitering Hab
Dual Hab
Conjunction Class
Direct to Phobos
Earth ↔ Mars Transit Stack
in HMO
Free-Return Trajectory
Work- systems
Jetpacks
SEV-class
Unpressurized Excursion
Vehicle
Pressurized Excursion
Vehicle
Mars Lander Class
6

Radiation Exposure
Cumulative exposure calculated using Phase 1 methodology • i.e. Oltaris exposure estimates adjusted for
occlusion of sky due to Mars and Phobos (incl. 10o crater rim for surface missions)
Total radiation dose reduced by up to 34% for Phobos surface Hab

Updated Regions of Interest on Phobos
1
2 3
4
5
67
8
9
10
11
These are examples of areas of interest on Phobos for investigation:1) Floor of Stickney Crater2) Side wall of Stickney Crater3) Far rim of Stickney Crater4) Overturn of Stickney Crater
and grooves5) Overlap of yellow and
white units6) Overlap of red and white
units with grooves7) Opposite rim of Stickney
and start of grooves 8) Brown outlined unit and
“mid-point” of grooves9) “End point” of grooves10)“Young” fresh crater11)“Deep” groove structure
Very likely in reality that some of these sites (i.e., inside Stickney crater) may have to be expanded to cover larger areas to obtain the desired science.

Phobos Exploration EVA Timeline Analysis
F1
F2
H1
• For analysis purposes, utilize DRAFT science “regions” of interest defined by scientists (1-11)
• Defined 1-km diameter “sites” in each region• Traverses would explore “sites” in each region by performing
activities at 5 smaller “subsites” (~15 m radius) within each “site”
• Standard circuit at each “subsite” consists of a standard series of tasks, e.g. 2 float samples, 1 soil, 1 core, 1 hammer chip, and an instrument deploy task.
• 11 near field survey ( 1km dia each) and 55 standard circuits including drill deploys
• 16 detailed EVA Timelines developed (i.e. standard circuit, near-field survey, drill deploy, etc.) for 4 different Ops Cons / work-system combinations
S1 C1
Standard Circuitat Subsite
Legend• F = float• H = hammer chip• S = soil• C = core• I = instr. deploy
I
15 m1
23
4
5
6
1
2 3
4
5
67
8
9
10
11
500 m
SITE
SUBSITE

Gross translations of 100 ft – 23 miles with ~100 ft accuracy
Intra-site translations < 100 ft with ~1 ft accuracy
Gross manipulations with ~3 in accuracy
Fine manipulations with ~1 in accuracy
Translate with tools and sample collection equipment of up to ~2 ft3 and ~15 lb
Translate with geophysical instruments of up to ~2 ft3 and ~40 lb
Translate with large ORU (e.g. ISRU experiment or drill) of up to ~35 ft3 and ~1,000lb
Provide worksite reaction force stabilization of up to ~15 lb
Provide access to SPE radiation protection within 20 min
Provide for incapacitated crewmember rescue
Provide for Gigapan, video, still, laser designator & other spectral sensors
TaskDecomposition
FunctionalRequirements
Work-System Concepts

Work-System Concepts
Unpressurized Excursion VehicleJetpacks (+ Mobile Payload Carrier)
Pressurized Excursion Vehicle
11

Low Energy Escapes from the Surface of Phobos
Dots along trajectories indicate 1 hour marks out to 6 hours. The dashed segments then
extend out to 1 day.
12

Contingency Return Estimates
• Assume return to radiation shelter required within 20 minutes (CxP requirement)
– Green indicates < 20 mins• Estimates assume uniform Phobos gravitational effects
and neglect curvature of Phobos• Assumes 0.1 ms-2 max acceleration / deceleration
Never reach max allowable speed
13

PEV Options
• SEV-class vehicle with RCS Sled & Hopper
• SEV-class vehicle with RCS sled only
• SEV-based taxi/lander
• MAV derived
SEV/HAL-Derived
SEV + RCS Sled
SEV + RCS Sled +
Hopper
MAV-Derived Taxi/Lander(horizontal)
MAV-Derived Taxi/ Lander(vertical)

PEV based EVA on Phobos
15
Zack Crues/ER7, Guy de Carufel/OSR, Dan Dexter/ER7
August 20, 2014


17
Core Cabin
Begin with cabin design for Mars surface and then work backwards to Mars moons, ARM, etc
Expl. Atmos. Validation
HAL-Taxi-PEV-MAV-SPR
Standard Interface
ECLSS
Mars Transit Vehicle
Habitat
Dust Tolerance & Mitigation
EVA Systems
Common Cabin Approach with Standard Interfaces

Human Spaceflight Architecture Team 18NASA Internal Use Only – Not for Distribution
Integrated Phobos Model
Combines the following data:• Copernicus estimates of Delta-V for DRO ↔ Surface and Surface ↔ Surface gross
translations (Dave Lee)• NExSys estimates of Delta-V for 5m to 500m surface translations (Zack Crues, Dan Dexter
& NExSys team)• Logistics estimates (Kandyce Goodliff’s calculator)• Habitat estimates (Matt Simon, David Reeves)• Detailed EVA timelines (Steve Chappell)• HMO ↔ Phobos service module estimates (based on data from Tara Polsgrove)• Identified regions of scientific interest (Paul Abell)
Generates mission-level estimates and comparisons of 70+ figures of merit including system masses, logistics, crew time, EVA time, EVA overhead, EVA productivity, and propellant

19
HAT Task 7C: Moons of Mars
Crew/ Duration @ Phobos
2 crew / 50 days
4 crew / 50 days
4 crew / 500 days [1000 d]
4 crew / 500 days [1000 d]
2 crew / 50 days
4 crew / 500 days [1000 d]
Pre-Staged to Phobos Nothing -PEV+RCS Sled
-Log. Modules-PEV + RCS sled -Habitat
-PEV + RCS Sled -Habitat Nothing - Mobile Hab
(incl. prop)
Pre-Staged Mass (kg) - 11,021kg 33,536 kg
[45,246 kg]31,893 - 37,383
[40,509 - 46,098] - 32,000 kg[43,943kg]
Launched to HMO
-PEV Taxi+SM-Log Modules -PEV Taxi + SM - PEV-Taxi + SM - PEV-Taxi + SM
-Minimal Taxi / Lander +
SM-Log Modules
-Minimal Taxi + SM
Mass to HMO 35,703 kg 25,305 kg 25,305 kg 25,305 kg 24,303 kg 13,579 kg
% Science Sites achieved 100% 100% 100% [200%] 100% [200%] 20% 100% [200%]
Radiation Dose vs. HMO-only 97% 97% 94-96% 66-80% 97% 66-80%
Phobos-specific elements
RCS Sled, optional Hopper
RCS Sled, optional Hopper
RCS Sled, optional Hopper
Hab landing legs, RCS Sled,
optional Hopper- Hab landing
legs
Surface HabDRO Habitat
2x PEV(1 as Taxi)
+
2x PEV(1 as Taxi)
+
1x PEV
Log Modules
2x PEV(1 as Taxi)
Minimal Taxi / Lander
Minimal Taxi
+ Mobile Hab

2020
Phobos Mission Mass (deltas to MarsOrbital Mission)

2121
How Long to Complete “Reference Science Content”? (From Phase 1 analysis, 100% = Standard EVA task circuit completed at 11 regions x 5 sites per region)
Cases 2.1, 2.2, 2.3, 2.4, & 2.7
Case 2.6

Phobos Hopper ATHLETE (6 Limbs)
MMSEV cabin
ATHLETE-derived limbs
Ratchet spring for capturing landing energy
Ball joint footpad with passive spring for leveling
Pros:- Existing technology- Footpads can be swapped
for wheels or other implements for Mars surface use
Cons:- Landing strain on ATHLETE
joints- Six limbs good for walking,
but maybe not necessary for hopper
ATHLETE-derived leg MEL (kg) qty Hip yaw 20.8 1 20.80Hip pitch 24.4 1 24.40Lower thigh 4.6 1 4.60Knee pitch 16.4 1 16.40Knee roll 13.8 1 13.80Shin 1.8 1 1.80Ankle pitch 11.2 1 11.20Ankle roll 13.6 1 13.60FT sensor 10 1 10.00Footpad cylinder 55 1 55.00Footpad shaft 3.6 1 3.60Footpad spring 2 1 2.00Footpad 23 1 23.00Avionics 43.3 1 43.33
Total / leg 243.53Total suspension system 6 1461.20

Human Spaceflight Architecture Team 23NASA Internal Use Only – Not for Distribution

Human Spaceflight Architecture Team 24NASA Internal Use Only – Not for Distribution

Mars Moons Task Conceptual Design
• Conceptual design of a mobile surface habitat– Close on concept(s) for mobile Phobos surface habitat; consider cis-
lunar, transit, and Mars surface commonality as much as possible– Include propulsion and legs for landing and for gross and local mobility
once on surface
?
ATHLETE
ARM-Derived
Fixed Legs

1
2 3
4
5
67
8
9
10
11
Mobile Surface Hab Exploration Assumptions
• Assumes a mobile habitat / vehicle that uses thrusters for gross repositioning
• Options for thrusters and/or “walking legs” to move to subsites within a site
Standard Circuitat SubsiteLegend• F = float• H = hammer chip• S = soil• C = core• I = instr. deploy
500 m
SITE
F1
F2
H1
S1 C1
I
15 m1
23
4
5
6
SUBSITE

Surface Hab Descent Motor Cutoff at Altitude to Minimize Surface Plume Contamination
• During descent, the Surface Hab can terminate propulsive thrusting at a maximum altitude of 95 to 155 m to minimize surface plume contamination– Low gravity levels on Phobos allow acceptable touchdown velocities
• Thrust vector during approach may be at an oblique angle to the surface, further minimizing contamination
Kinematic analysis of landing gear motion yields touchdown velocity limit of about 1.08 m/s
NExSyS simulation of Free-Fall in Phobos gravity yields max engine cutoff altitude of 95 to 155 m
depending on location (~4.6 mins)
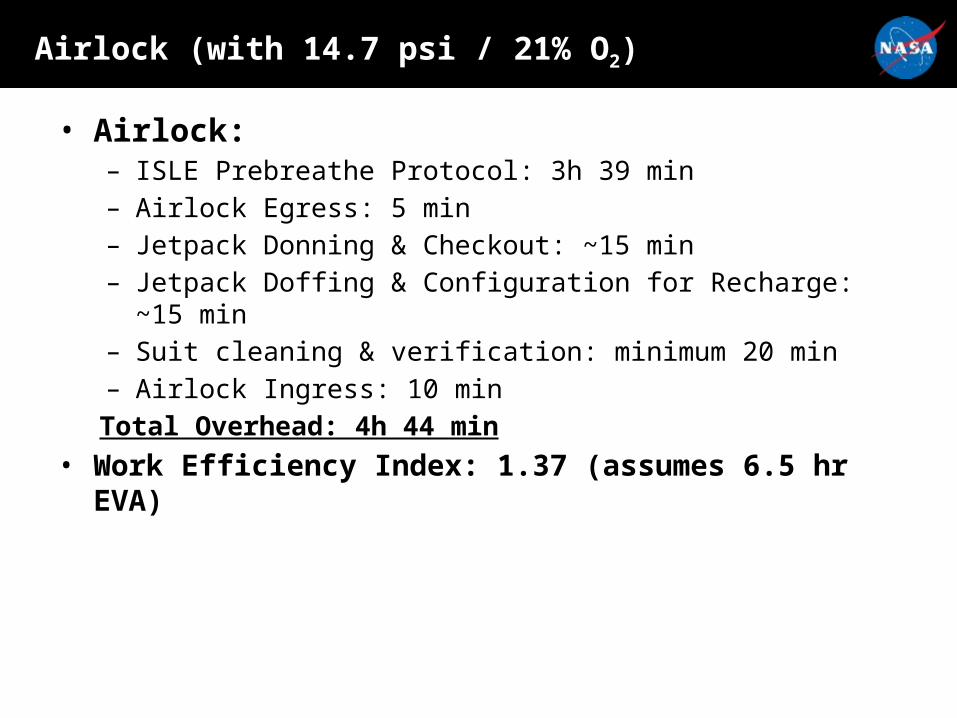
Airlock (with 14.7 psi / 21% O2)
• Airlock:– ISLE Prebreathe Protocol: 3h 39 min– Airlock Egress: 5 min – Jetpack Donning & Checkout: ~15 min– Jetpack Doffing & Configuration for Recharge: ~15 min– Suit cleaning & verification: minimum 20 min– Airlock Ingress: 10 min
Total Overhead: 4h 44 min
• Work Efficiency Index: 1.37 (assumes 6.5 hr EVA)

Suit Port (with Exploration Atmosphere):
¨ Suit Port Egress: 20 min¨ Jetpack Donning & Checkout: ~15 min¨ Jetpack Doffing & Config for Recharge: ~15
min¨ Suit Cleaning: 5 min¨ Suitport Ingress:10 minTotal Overhead: 1h 5 min¨ Work Efficiency Index: 6.0 (assumes 6.5
hr EVA)
• Suit Port Egress• Don Suit: 8 min• Close/lock hatch: 1 min • Mode to PRESS (6.0 PSI): 0.5 min• Leak check in suit: 2 min • Purge: 2 min• Mode to EVA (6 PSI): 0.5 min• Start prebreathe clock • Vestibule depress to 3.5 PSI: 1 min• Leak Check: 1 min• Vestibule depress to 0 PSI: 1 min• Release from Suit Port: 1 min
• Suit Port Ingress:• Engage Suit Port (red)• Vestibule press to 8.0 PSI• Leak Check 1 min• Vestibule-Cabin press equalization• Vestibule-Cabin-Suit equalization• Open PLSS lock• Open hatch (blue)• Close PLSS lock• Egress suit

EVA Crew can work from PFR and/or BRT

Reconfigurable booms increase radius of influence from surface habitat
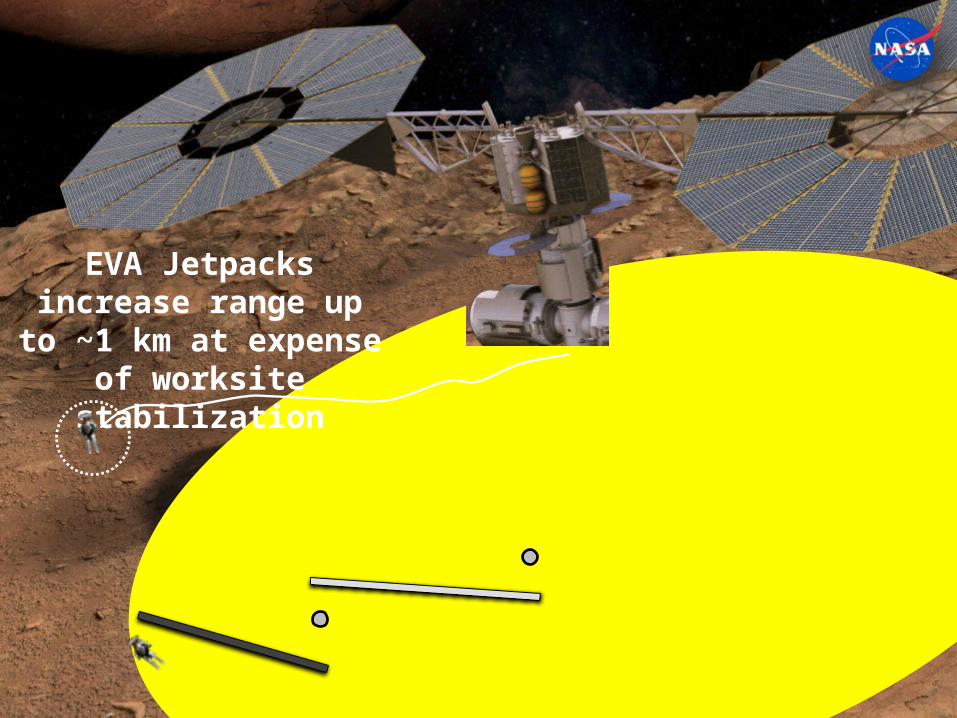
EVA Jetpacks increase range up to ~1 km at expense of
worksite stabilization

Page No. 33 Pre-decisional, For Internal Use Only
Evaluation of Mars Moons Exploration Methods from a Surface Habitat
• NEEMO 20 will investigate the concept of having a deployable structure on a Phobos Habitat.
• This device would allow for translation and body-stabilized activities off a Phobos habitat providing access to a wide area to study from a single landing site on Phobos, which is a body with milligravity.

[email protected] [email protected] /
LLT Sequence Summary
34
LLT SequenceApprox. Durationw/ LOS(days)
Approx. Duration w/ comm
relay(days)
Latency Sensitivity
1. Landing Site Recon & Hazard Assessment 119 91 2
2. Offloading 18 7 3
3. Power Cable Deploy w/o trenching & burying 5 5 1
4. Power Cable Deploy with trenching & burying 138 53 4
5. O2 Production 2 2 2
6. MAV Fuel 3 1.5 2
TOTAL without burying power cable 147 107 *
TOTAL w burying power cable 280 155 **
* Indicates ~ 28% less time for LLT ops if continuous comm available – e.g. comm relay(s).** Indicates cable burying time could be reduced almost by half if continuous comm is available.
Existing timelines provide on the order of 180 days in a 450day mission available for LLT
NASA Pre-Decisional – Internal Use Only – Do Not Distribute

RRM Coolant Valve Panel (CVP): ~100 hours, ~800 pages of procedures, ~10,000+ commands excluding video support. • Does not include MT/SSRMS/SPDM pre-setup or post
relocation.• Checked out 3 tools (SCT, MFT, WCT)• Using Multi Function Tool(MFT) released the 7 MFT adapter
receptacle launch locks• Using the Wire Cutting Tool(WCT) cut T-Valve wire and
Ambient Cap wire• T-Valve removed using MFT and T-Valve Adapter• Ambient Cap removed using MFT and Ambient Cap Adapter• Plug manipulated using MFT and Plug Manipulator Adapter
Refueling Ops: ~80 hours, ~600 pages, ~7,500 commands • Tertiary Cap safety wire cut and Safety Cap safety wire cut
using WCT• Tertiary Cap removed using MFT and Tertiary Cap Adapter• Safety Cap removed using SCT• Plumb valve acquired and actuated using ENT• Refueling ops completed

Evolvability of Phobos Systems from Cis-Lunar
Solar Electric Propulsion(SEP)
Deep Space Habitat(DSH)
Cryogenic PropulsionStage(CPS)
Orion + Service Module
Taxi (shown asHAL/PEV-derived)
Phobos ExplorationVehicle (PEV) (shown
w/ RCS sled)
Phobos SurfaceHabitat w/
Landing System
Suit Ports w/Exploration
Atmospheres
Items evolvable from Cis-Lunar shown in green

Evolvability of Phobos Systems to Mars Surface
Solar Electric Propulsion(SEP)
Deep Space Habitat(DSH)
Cryogenic PropulsionStage(CPS)
Orion + Service Module
Taxi (shown as HAL/PEV-derived)
Phobos ExplorationVehicle (PEV) (shown
w/ RCS sled)
Phobos SurfaceHabitat w/
Landing System
Suit Ports w/Exploration
Atmospheres
Items not Mars-forward are shown in red

Systems Needed for Mars Surface(Systems needed for Phobos in Green)
Solar ElectricPropulsion (SEP)
Deep Space Habitat(DSH)
Cryogenic PropulsionStage(CPS)
Orion + Service Module HAL
Small PressurizedRover (SPR) Surface Habitat
SLS
Suit Ports w/Exploration
AtmospheresAeroshell MAV Lander
UPR
Robotic Rover
ISRU NuclearPower
LogisticsModules Offloading
SystemsPower Cable
SystemsExplorationEVA Suits

Affordability
• Phobos is a step in the direction of Mars surface– Develops the transportation and operations infrastructure– All of the Phobos systems are Mars surface forward except phobos surface mobility systems
• Assuming that SLS, Orion and exploration suits are sunk costs, then Phobos requires:– 7 additional developments: SEP, DSH, CPS, SEV cabin (or equivalent), phobos mobility system,
suit ports, hab landing gear ( probably from ARM)– Phobos draws heavily from the Cis Lunar ARM mission ( SEP, suit ports, microgravity geology,
landing legs etc.)• Mars surface builds heavily on Phobos investment but requires:
– 9 Mars surface specific developments in addition to the Phobos investments: aero shell, MAV, surface habitat, lander, SPR chassis/UPR, ISRU, nuclear power, offloading systems, power cable management system, robotic rover.
– Many of these are expensive low TRL developments i.e. MAV, Lander, Aero shell, Nuclear power etc.
• Within a Evolvable Mars Campaign that starts with ARM and Cislunar infrastructure, Phobos is viable human target that is a sensible and relatively affordable step to Mars surface.
– provides meaningful science return– Enhances and possibly enables the Human Mars surface mission via low latency telerobotics


Robotic Precursor Missionsfor Phobos and Deimos
Stan Love,Paul Abell, Mike Gernhardt David Lee, AndrewAbercromby, Steve Chappell, Bill Harris, Scott Howe, and Brian Wilcox
Robotic Precursor Mission to Phobos and Deimos

Robotic Precursor Mission to Phobos and Deimos
Rationale
“A human mission to the Phobos/Deimos surface would require a precursor mission that would land on
one or both moons.”
-- Finding #2 of the Precursor Strategy Analysis Group

Robotic Precursor Mission to Phobos and Deimos
Objectives1.Characterize the gravitational field ( for GNC,
traverse planning, consumable estimates)2. Identify regions of scientific interest and hazards3.Characterize the soil mechanics for analysis of
hopper efficiency and dust environment.4. Identify and characterize any useful materials
that could be used for in situ resource utilization.5.To the extent possible incorporate assets that
have residual value to the human mission

Robotic Precursor Mission to Phobos and Deimos
Strategic Knowledge Gap(P-SAG, 2012)
Relevant Measurements(Murchie et al, 2014)
A3 1. Orbital particulate environment‐
Particle size frequency and distribution of dust belts‐
C1 1. Surface composition and potential for ‐ISRU (C, H)
Elemental composition, including C and H Mineral composition, including hydrous phases Global spectral imaging, or elemental abundance
mapping, for geological context
C2 1. Charged particle environment‐ Near surface total dose and energy measurements‐
C2 2. Gravitational fields‐
Overall mass and mass distributions/concentrations from radio science
Global shape through stereo imaging and/or lidar measurements
C2 3. Regolith geotechnical properties‐
Thickness and rock abundance from imaging and/or radar
Particle size distribution, μm to cm scale structure Regolith mechanical properties experiment

Robotic Precursor Mission to Phobos and Deimos
Science Questions1. What is the composition of both moons?
2. What are their origins? Are they related to Mars?
3. Are Phobos and Deimos related to each other? And if so how?
4. How have these bodies evolved over time?
5. What are the internal structures of Phobos and Deimos?

Robotic Precursor Mission to Phobos and Deimos
Which Moon?Phobos and Deimos are equally interesting from a science perspective. There's no compelling reason to prefer one or the other for close study.
Phobos offers more area (1500 km2) to explore, plus scientifically interesting linear grooves, some spectrally diverse terrains, and a large crater (Stickney).
Deimos is smaller (500 km2), but less well studied which increases its priority for reconnaissance.
Both moons have the potential to contain material from Mars in their regoliths.
Given only what we know to date, Phobos would be the preferred target from an exploration perspective. Note that with additional information on both moons, this situation could change.

Robotic Precursor Mission to Phobos and Deimos
Remote Sensing(Measurements made from orbit)
Radio science is needed to measure the moon's mass, mass distribution, and gravity field for trajectory planning. No dedicated instrument needed; these measurements come for "free" by analyzing the spacecraft's downlink signal.
A laser altimeter is needed to precisely measure the moon's shape and add range data that helps with radio science measurements. TRL 9, moderate power, low data rate.
A telescopic imaging camera is needed to map the entire moon at sub-meter resolution and photograph selected areas of interest at sub-centimeter resolution. TRL 9, moderate power, high data rate.

Robotic Precursor Mission to Phobos and Deimos
Remote Sensing(Continued)
A visible and near-infrared (0.4-3.0 mm) imaging spectrograph is needed to produce a global map of mineral composition variations at a resolution of tens of meters, and maps of selected areas of interest at meter resolution. TRL 9, moderate power, high data rate.
A thermal infrared imager is desired to measure heat flow, thermal inertia, and grain size distributions at a resolution of tens of meters.TRL 9, low power, moderate data rate.
A gamma-ray and neutron detector is desired to measure atomic composition at a resolution of hundreds of meters. TRL 9, low power, low data rate.
A magnetometer and a Langmuir probe would be nice to map the magnetic properties and plasma field of the moon. TRL 9, low power, low data rate.

Robotic Precursor Mission to Phobos and Deimos
Remote Sensing(Continued)
A ground-penetrating radar would be nice to measure the depth of the regolith and to map the moon's internal structure. TRL 7, high power, high data rate.

Robotic Precursor Mission to Phobos and Deimos
In-Situ Investigations(Measurements made after landing)
A penetrometer is needed to measure the compressive strength of the regolith under loads of a few pounds. TRL 7, very low power, low data rate.
A motion-imagery camera is needed to observe the penetrometer tests, recording imagery before, during, and after contact. Its resolution should be less than 1 mm. TRL 9, low power, high data rate.
A dust-adhesion witness plate and camera are needed to characterize any dust raised by surface contact and thruster firings. This experiment could use the same camera as the penetrometer. TRL 9, low power, high data rate.
A microimager is needed to assess the sizes and shapes of dust particles, and thus their threat to human health. TRL 9, low power, moderate data rate.

Robotic Precursor Mission to Phobos and Deimos
In-Situ Investigations(Continued)
An alpha-proton-X-ray, X-ray fluorescence, Mössbauer, or Raman spectrometer is needed to precisely measure the atomic and mineral composition of surface materials. TRL 8-9, low to moderate power, low data rate.
A temperature probe would be nice to pinpoint the thermal properties of the regolith. TRL 9, very low power, very low data rate.

Human Spaceflight Architecture Team 52NASA Internal Use Only – Not for Distribution
Robotic Precursor Mission to Phobos and Deimos
DRAFT Technical Data for Notional Remote Sensing Instruments
Type Dimensions Mass Power Heritage(cm) (kg) (W)
Laser altimeter* 28x17x12 12.6 34 LOLA on LRO+ 45x51x36
Telescopic imager* 70x26x27 16.4 9.3 LROC on LROVis-IR imaging spectrograph* 30x30x30 10.3 6.3 Ralph on New HorizonsThermal IR imager* 10x20x30 4.5 4.4 Alice on New HorizonsGamma-neutron detector* 46x46x44 26.3 13 LEND on LROMagnetometer 10x10x20 3.3 2.3 SWAP on New HorizonsLangmuir probe 5x10x20 1.5 2.5 PEPSSI on New HorizonsGround-penetrating radar 400x400x100 41.4 108 RADAR on Cassini
*Note that we should be able to leverage instruments from other small body missions such as Dawn, Hayabusa 1 & 2, and OSIRIS REx missions.

Human Spaceflight Architecture Team 53NASA Internal Use Only – Not for Distribution
Robotic Precursor Mission to Phobos and Deimos
DRAFT Technical Data for Notional In Situ Instruments
Type Dimensions Mass Power Heritage(cm) (kg) (W)
Penetrometer 15x15x20 2.4 est. 1 Deep Space 2Motion-imagery camera 10x10x10 est. 1 est. 5 MAHLI on MSLDust-adhesion witness plate 1x20x20 est. 1 0 ---Micro-imager 10x10x10 est. 1 est. 5 MAHLI on MSLAlpha Particle X-ray detector 15x15x10 est. 1.5 est. 3 APXS on Mars PathfinderTemperature probe est. 10x10x30 est. 3 est. 1 ---
MINERVA rover 12x12x10 0.6 2 Hayabusa 1 & 2(MIcro/Nano Experimental Robot Vehicle for Asteroid)3 CCD cameras, 6 thermometers, 6 photodiodes
MASCOT rover 29x20x28 10.8 20 Hayabusa 2(Mobile Asteroid Surface Scout)MicroOmega – near-infrared imaging spectrometer/microscopeMARA – radiometerMAG – magnetometerCAM – wide angle camera

Robotic Precursor Mission to Phobos and Deimos
Orbiters or Landers?Option 1. All-in-one spacecraft that surveys the moon from orbit, then touches down in one or more places for in-situ investigations.
Option 2. Separate orbiter and lander.
Option 3. Orbiter plus a number of small landers or hoppers.
Other possibilities?
Good question.

miniATHLETE Hopper Auger Anchor Stowed
Solar cells (also on bottom) 165W capacity total each side
Stereo cameras
Limb with auger anchor stowed
1.0m (39”)

miniATHLETE Hopper Auger Anchor Deployed
Solar cells (also on bottom)
Stereo cameras symmetrical
4 DOF leg with identical motors, planetaries, and CSF20 harmonics
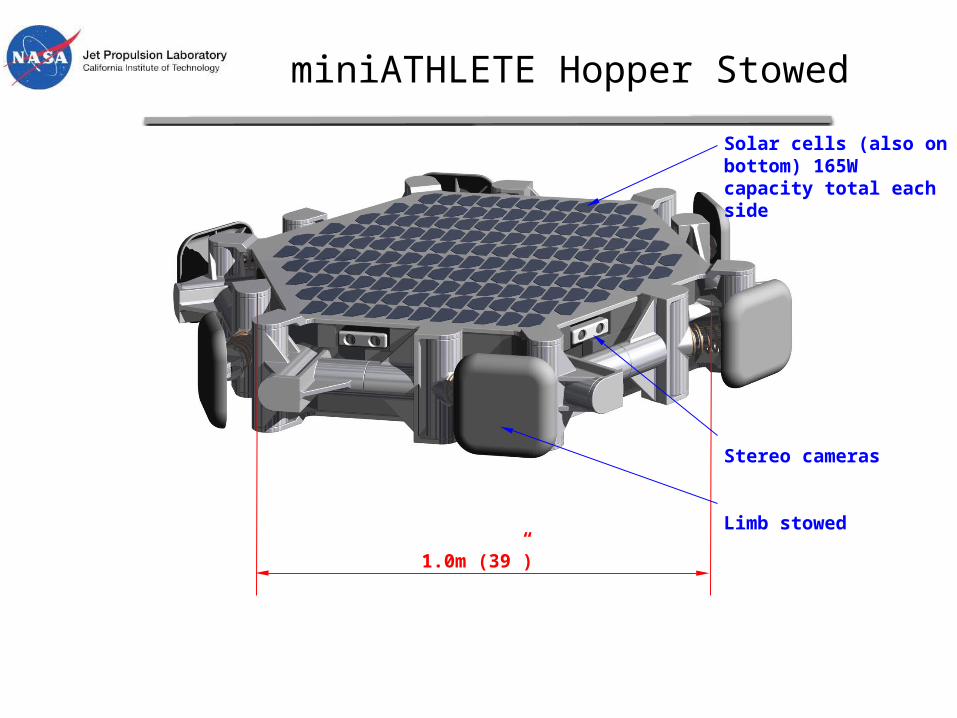
miniATHLETE Hopper Stowed
Solar cells (also on bottom) 165W capacity total each side
Stereo cameras
Limb stowed
1.0m (39”)

miniATHLETE Hopper Deployed
Solar cells (also on bottom)
Stereo cameras symmetrical
4 DOF leg with identical motors, planetaries, and CSF20 harmonics

miniATHLETE Hopper Deployed
Symmetrical limbs
Solar cells (also on bottom)
Stereo cameras symmetrical
Hip-yaw
Thigh
Knee-roll
Spring mechanism
Foot pod
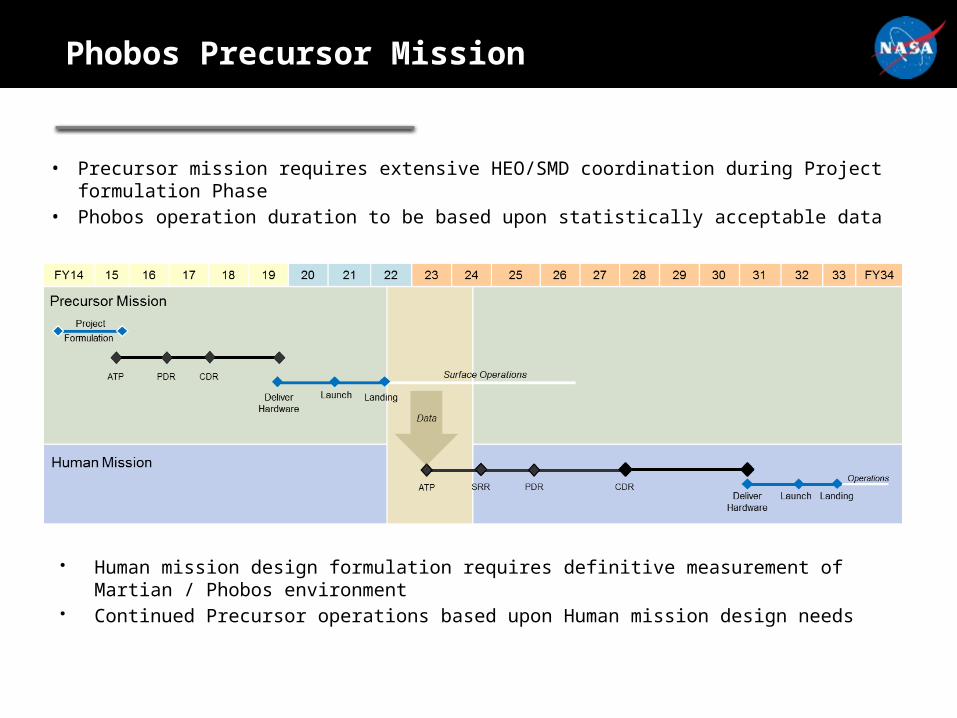
• Precursor mission requires extensive HEO/SMD coordination during Project formulation Phase
• Phobos operation duration to be based upon statistically acceptable data
Human mission design formulation requires definitive measurement of Martian / Phobos environment
Continued Precursor operations based upon Human mission design needs
Phobos Precursor Mission

3-Burn Sequence at Mars Arrival
Phobos’ Orbit
Approach Direction
Mars Orbit Insertion (MOI) /Periapsis
Plane Change and RaisePeriapsis
Phobos OrbitInsertion

Earth-Phobos Transfer Opportunities:Optimized for Arrival 3-Burn Vs Optimized for TMI

ELV Injection Mass Capability as a Function of V-Infinity
Falcon 9 v1.1
Atlas V 501
Atlas V 551
Atlas V 431
Atlas V 401
Data from NASA Launch Services Program Launch Vehicle Performance Website.
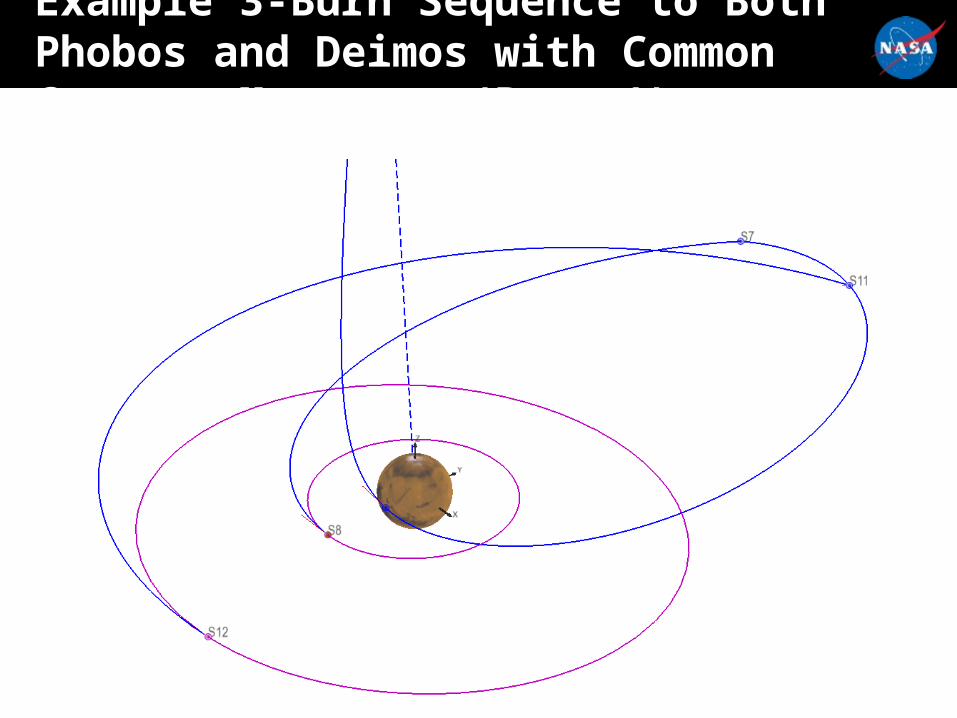
Example 3-Burn Sequence to Both Phobos and Deimos with Common Capture Maneuver (Burn 1)

Results/Conclusion
• Performance requirements depend on which opportunities are selected• Very preliminary “All Opportunites” performance numbers might be roughly:
– 4 km/s TMI V-infinity– 1.8 km/s Arrival 3-burn sequence– Should be taken as “ballpark” numbers
• Current capability ELVs can inject over 4000 kg to 4 km/s V-infinity• Arrival 3-Burn sequence will require from 38% to 46% of initial vehicle mass
in propellant– Assuming single stage and storable bipropellant or LOX/methane– A separate Capture stage or aerobraking may also be options
• Sending probes to Phobos and Deimos on the same launch appears feasible from a trajectory standpoint. 3-burn sequences with common capture maneuvers have been modelled.

National Aeronautics and Space Administration
Backup

Surface Hab Descent Motor Cutoff at Altitude to Minimize Surface Plume Contamination
• During descent, the Surface Hab can terminate propulsive thrusting at a maximum altitude of 95 to 155 m to minimize surface plume contamination– Low gravity levels on Phobos allow acceptable touchdown velocities
• Thrust vector during approach may be at an oblique angle to the surface, further minimizing contamination
Kinematic analysis of landing gear motion yields touchdown velocity limit of about 1.08 m/s
NExSyS simulation of Free-Fall in Phobos gravity yields max engine cutoff altitude of 95 to 155 m
depending on location (~4.6 mins)

National Aeronautics and Space Administration
Modular Phobos Habitat Trade Options
Matthew Simon - LaRC
04/14/2023 68

Modular Phobos Habitat Trade Options
Monolithic Pre-deployed Phobos Surface Habitat• 1 PEV (contingency EVA) and 2
PEV (No EVA) cases • 100, 250, 500, 500+500 day
cases
69
Core Modul
e
Habitation
Module(s)
PEV
PEV
Monolithic Habitat
PEV
PEV
Modular Phobos Surface Habitat: Core Module + Habitable Module +2 PEVs• Contingency EVA and no EVA
cases • 100, 250, 500, 500+500 day
cases
PEV + ECLSS Module + Habitation Module• Water reclamation,
filtration, and O2 Generation + access space ~ 1 m3) + inflatable module or core module structure derived module
• EVA and suit maintenance from PEV
• 100, 250, 500 day cases
2 Tuna Can Modular Case (in work)• Aim for <20 ton chunks• Maximize diameter use
for launch vehicle utilization
< 20 T Half-Habitat
PEV
PEV
< 20 T Half-Habitat
Habitation
Module(s)
PEV ECLSS
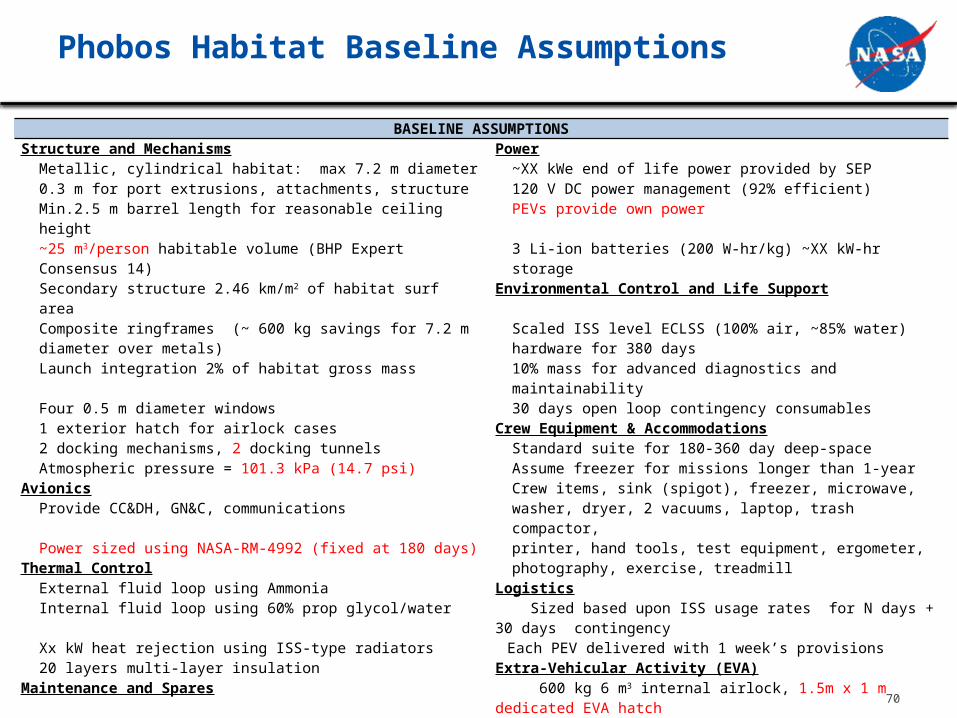
Phobos Habitat Baseline Assumptions
BASELINE ASSUMPTIONSStructure and Mechanisms Power
Metallic, cylindrical habitat: max 7.2 m diameter ~XX kWe end of life power provided by SEP0.3 m for port extrusions, attachments, structure 120 V DC power management (92% efficient)Min.2.5 m barrel length for reasonable ceiling height PEVs provide own power~25 m3/person habitable volume (BHP Expert Consensus 14) 3 Li-ion batteries (200 W-hr/kg) ~XX kW-hr storageSecondary structure 2.46 km/m2 of habitat surf area Environmental Control and Life SupportComposite ringframes (~ 600 kg savings for 7.2 m diameter over metals) Scaled ISS level ECLSS (100% air, ~85% water) hardware for 380 daysLaunch integration 2% of habitat gross mass 10% mass for advanced diagnostics and maintainabilityFour 0.5 m diameter windows 30 days open loop contingency consumables1 exterior hatch for airlock cases Crew Equipment & Accommodations2 docking mechanisms, 2 docking tunnels Standard suite for 180-360 day deep-spaceAtmospheric pressure = 101.3 kPa (14.7 psi) Assume freezer for missions longer than 1-year
Avionics Crew items, sink (spigot), freezer, microwave, Provide CC&DH, GN&C, communications washer, dryer, 2 vacuums, laptop, trash compactor,Power sized using NASA-RM-4992 (fixed at 180 days) printer, hand tools, test equipment, ergometer,
Thermal Control photography, exercise, treadmillExternal fluid loop using Ammonia LogisticsInternal fluid loop using 60% prop glycol/water Sized based upon ISS usage rates for N days + 30 days contingencyXx kW heat rejection using ISS-type radiators Each PEV delivered with 1 week’s provisions20 layers multi-layer insulation Extra-Vehicular Activity (EVA)
Maintenance and Spares 600 kg 6 m3 internal airlock, 1.5m x 1 m dedicated EVA hatchSized using Monte Carlo simulation engine (EMAT) 2 person EVAs using shuttle-class internal airlock
Reserves 2 spare per suit for every suit componentMargin Growth Allowance: 20% of basic mass 1 EVA per 30 days (contingency)Project Manager’s Reserve: 10% of basic mass Utilization
Protection 500 kg (1.8 m3) unallocated science payloadMMOD protection 130 kg (2.34 m3) Valkyrie style IVA robotNo additional radiation protection beyond logistics
70

Monolithic Cases
PEVs Option Mass, kg Volume, m3 Diameter, m Length, m
1
Monolithic, 100, Contingency EVA* 19,820 137.7 7.20 4.13Monolithic, 250, Contingency EVA 22,942 152.2 7.20 4.49Monolithic, 500, Contingency EVA 28,261 176.9 7.20 5.09Monolithic, 500+500, Contingency EVA 36,877 220.2 7.20 6.16
2
Monolithic, 100, No EVA* 16,817 120.8 6.90 3.95Monolithic, 250, No EVA 20,084 135.3 7.20 4.07Monolithic, 500, No EVA 25,393 160.0 7.20 4.68Monolithic, 500+500, No EVA 34,009 203.4 7.20 5.74
71
* Overall 100 day estimates are likely overly conservative• Partially Closed ECLSS may be non-optimal for mission durations under 6
months in length.• Spares mass, may be greatly conservative for 100 days using regression• Maintenance mass conservatively held at 250 days value • Habitable volume maintained at long duration level since functionality hasn’t
really changed
25-28T for 500 day Monolithic

Core + Habitable Cases New Assumptions
Functionality Split:
Core Module:• Add docking mechanism and docking tunnel to baseline assumptions (3 and 2) (1 active ~350 kg, 1 passive~120 kg)• No crew quarters• Supports Habitation/Logistics module in battery power• ECLSS supports both core and habitation modules• Independent thermal rejection system• Avionics power sized using NASA-RM-4992 (fixed at 180 days)
Habitable Module:• 2 docking mechanisms (all passive), 2 docking tunnels, 1 external hatches without docking mechanism if EVA is included)• Removed all avionics since a second set is included in spares estimates on Core module (revisit assumption and location of avionics later)• Removed Batteries• Storage for all logistics and spares• Leveraged PEVs for crew quarters (only if PEV is located below habitat)• Independent thermal rejection system 72
Core Module Habitable Module
• ECLSS and fluid storage• Thermal• Power (PMAD and storage)• Galley• Hygiene• Avionics
• ECLSS (distribution)• Thermal• Power (PMAD)• Meeting areas• Crew Quarters• Exercise• Medical• Utilization• Spares• EVA

Modular Core + Habitable Modules Cases (2 PEV)
EVA Strategy Option Mass, kg Volume, m3 Diameter, m Length, m
Contingency EVA
Core Module, 100 days, Contingency EVA* 8,048 41.8 4.42 3.18Habitable Module, 100 days, Contingency EVA* 13,661 87.7 6.04 3.69Core Module, 250 days, Contingency EVA 8,889 43.3 4.49 3.20Habitable Module, 250 days, Contingency EVA 16,262 101.1 6.41 3.80Core Module, 500 days, Contingency EVA 9,663 44.6 4.55 3.22Habitable Module, 500 days, Contingency EVA 21,220 124.8 6.99 3.98Core Module, 500+500 days, Contingency EVA 9,802 44.6 4.55 3.22Habitable Module, 500+500 days, Contingency EVA 29,796 168.2 7.20 4.88
No EVA
Core Module, 100 days, No EVA* 8,025 41.8 4.42 3.18Habitable Module, 100 days, No EVA* 11,275 81.7 5.87 3.63Core Module, 250 days, No EVA 8,866 43.3 4.49 3.20Habitable Module, 250 days, No EVA 13,959 95.1 6.25 3.75Core Module, 500 days, No EVA 9,639 44.6 4.55 3.22Habitable Module, 500 days, No EVA 18,918 118.8 6.85 3.94Core Module, 500+500 days, No EVA 9,779 44.6 4.55 3.22Habitable Module, 500+500 days, No EVA 27,564 162.1 7.20 4.73
73
* Overall 100 day estimates are likely overly conservative• Partially Closed ECLSS may be non-optimal for mission durations under 6 months in length.• Spares mass, may be greatly conservative for 100 days using regression• Maintenance mass conservatively held at 250 days value • Habitable volume maintained at long duration level since functionality hasn’t really changed
28-31T for 500 day Core + Habitation Module

ECLSS Module + 2 PEVs + Habitable Module Cases New Assumptions
Functionality Split:
ECLSS Module• 1 docking mechanism/suitport• 1m3 habitable volume• ECLSS supports both PEVs and habitation modules• Independent thermal rejection system• Assumes no Sabatier system available
Habitation/Logistics Module:• 2 docking mechanisms (all passive), 2 docking tunnels,• Included Avionics since PEV avionics will probably be insufficient for stack control and comm• Added Batteries• Storage for all logistics and spares• Leveraged PEVs for crew quarters (only if PEV is located below habitat)• Independent thermal rejection system
74
ECLSS Module Habitable Module
• Partially Closed Loop Water
• O2 Generation• Water and O2 storage• Thermal including
minimal air circulation• Power (PMAD)
• Avionics• ECLSS (distribution)• Thermal• Power (PMAD and Storage)• Meeting areas• Exercise• Medical• Utilization• Spares
PEV
• Partially closed CO2 Removal• Fire Detection, Suppression• Thermal • Power (PMAD and Storage)• Hygiene• Crew Quarters• EVA and Suit Maintenance

ECLSS Module + Habitable Module Cases (2 PEV)
Option Mass, kg Volume, m3 Diameter, m Length, mECLSS Module, 100 day, No EVA 3,863 7.2 3.54 1.10Habitable Module, 100 day, No EVA 13,640 114.2 6.74 3.90
ECLSS Module, 250 day, No EVA 4,611 8.7 3.77 1.18Habitable Module, 250 day, No EVA 16,235 127.6 7.05 4.00ECLSS Module, 500 day, No EVA 5,261 10.0 3.94 1.23Habitable Module, 500 day, No EVA 20,996 151.3 7.20 4.47
75
* Assumes CO2 Removal contingency backups and resupply masses are carried by PEV (Spares are carried by Habitable Module)
* ECLSS Module + 2 PEVs + Habitable module are required for full habitation capability (functionality semi-tradeable at shorter duration)
* Overall 100 day estimates are likely overly conservative• Partially Closed ECLSS may be non-optimal for mission durations under 6 months in
length.• Spares mass, may be greatly conservative for 100 days using regression• Maintenance mass conservatively held at 250 days value • Habitable volume maintained at long duration level since functionality hasn’t really
changed
26T for 500 day Habitation Module + ECLSS Module

Human Spaceflight Architecture Team 76NASA Internal Use Only – Not for Distribution
Comparison of Habitation Options (excluding PEV masses)
100 days 250 days 500 days 500 + 500 days
Monolithic (1 PEV) 19820 22942 28261 36877
Monolithic (2 PEVs) 16817 20084 25393 34009
Core + Habitation (2 PEVs) 21709 25151 30883 39598
Habitation Mod. + ECLSS Mod. (2 PEVs)
17503 20846 26257 NaN
2500
7500
12500
17500
22500
27500
32500
37500
42500
Mas
s(kg
)ex
clud
ing
PEVs

Human Spaceflight Architecture Team 77NASA Internal Use Only – Not for Distribution
Comparison of Habitation Options (including PEV masses)
100 days 250 days 500 days 500 + 500 days
Monolithic (1 PEV) 26320 29442 34761 43377
Monolithic (2 PEVs) 29817 33084 38393 47009
Core + Habitation (2 PEVs) 34709 38151 43883 52598
Habitation Mod. + ECLSS Mod. (2 PEVs)
30503 33846 39257 NaN
5000
15000
25000
35000
45000
55000
Mas
s(kg
)in
clud
ing
PEVs

Human Spaceflight Architecture Team 78NASA Internal Use Only – Not for Distribution
Pre-Deployed Mass Comparison of Habitation Options (including Pre-Deployed PEV masses)
100 days 250 days 500 days 500 + 500 days
Monolithic (1 PEV) 19820 22942 28261 36877
Monolithic (2 PEVs) 23317 26584 31893 40509
Core + Habitation (2 PEVs) 28209 31651 37383 46098
Habitation Mod. + ECLSS Mod. (2 PEVs)
24003 27346 32757 NaN
2500
7500
12500
17500
22500
27500
32500
37500
42500
47500
Pre-
Depl
oyed
Mas
s(kg
)
1 PEV pre-staged with these cases

Human Spaceflight Architecture Team 79NASA Internal Use Only – Not for Distribution
Habitation Findings
Monolithic habitats are most mass efficient: • 25T for Monolithic (500 days, No EVA)• 26T for ECLSS Module + Habitation Module
- Largely closes ECLSS for whichever vehicle it is attached to- Flexibility to add capability after initial simpler semi-closed ECLSS for shorter duration missions- Saves ~5lb water/p/day does not pay for itself until > 250-400 day missions
• 28T for Core Module + Habitation Module: gives options for mission appropriate sizing- Does not optimize launch packaging
Minimizing core results in very small module which doesn’t fully utilize diameter of launch vehicle or provide a similar size as other modules in the architecture• Future Work: Trade a fixed volume, 2-module case which allocates functionality to arrive at roughly
equal Core and Habitable Module masses and sizes (2 Tuna Cans) ECLSS Module estimates are approximate but appear comparable to Monolithic options
• Should not introduce significant operational complexity but will add some weight vs. fully-integrating with other ECLSS
• Benefit to decoupling logistics from habitation, particularly if habitat is to be resupplied and/or mission durations are variable or uncertain
• Future work: Refine mass and volume estimates, packaging, interfaces, and further evaluate architectural, engineering, and operational implications including possibility of dual ECLSS modules

Human Spaceflight Architecture Team 80NASA Internal Use Only – Not for Distribution
Habitation Findings
With 27T Mars surface lander, smaller sizes provide options for landing systems on Mars with mobility
For Mars surface ops, if hab is not mobile, presents challenges for docking with PEVs / crew transfer• Need mobile off-loading capability
For steady-state Mars campaign, logistics resupply will be required, which may warrant an appropriately sized logistics module vs. sizing habs to incorporate 500 days of logistics• Volume estimates suggest possible commonality between ECLSS module,
logistics module, rover cabin, lander cabin, MAV cabin, airlock, crew taxi cabin Could start a surface campaign with smaller, lower mass hab
modules for shorter durations, then later deliver ECLSS module(s) and logistics module(s) to enable extended durations and increased redundancy

Human Spaceflight Architecture Team 81NASA Internal Use Only – Not for Distribution
Straw Man Habitation Framework for Discussion
Mars Transit Hab:• Hab module ~100m3 (optional ECLSS module)• Logistics module(s) as needed• Habitable Airlock (HAL); used for supplemental habitation and contingency EVA during transit
phases (and also used at Phobos, as described below) Phobos Hab:
• Hab module (same design as Mars Transit Hab module)• Logistics module(s) as needed (same design as Mars Transit Hab, optional ECLSS module)• HAL-Taxi from Mars Transit vehicle used with Service Module as crew taxi between HMO and
Phobos - Can use HAL-taxi as habitable airlock for Phobos habitat - Option to include suitports and RCS sled to enable use as PEV for Phobos exploration
Mars Surface:• Hab module (same design as above)• Logistics modules (same design) arrive with crew, right-sized for mission duration• ECLSS module(s) would make hab modules smaller and provide mass margin for mobility
elements on early shorter duration missions, if desired• HAL-derived Pressurized Rovers

Exploration Assumptions & Concept Options
• Combination of a mobile surface habitat with jetpacks and tethers to extend exploration range
• Could be combined with other options (i.e. triangle booms) to provide further capability
• Microspine and other anchoring technology for stabilization away from habitat
JPL Microspine Anchoring Technology