atlas & ps2 asteroid retrieval mission target detection capability ... · the ps2 survey system...
TRANSCRIPT

ATLAS & PS2
asteroid retrieval missiontarget detection capability study
prepared for NASA HEOMD
and the Jet Propulsion Laboratory
by
Robert Jedicke1 & Eva Schunova1
with
Peter Veres1, Larry Denneau1
2013 April 25
1Institute for Astronomy, University of Hawaii, 2680 Woodlawn Drive, Honolulu, HI,
96822, [email protected], 808.956.8080 (office), 808.988.3893 (fax)
– 2 –
1. Executive Summary
We have performed detailed good-fidelity simulations of the Asteroid Terrestrial-impact
Last Alert System (ATLAS, Tonry 2011) and the 2nd telescope of the Panoramic Survey
Telescope and Rapid Response System (PS2, e.g. Morgan et al. 2012) for detecting a set
of small asteroids that are accessible for robotic spacecraft retrieval. The small asteroids
(referred to as ‘pop1’ objects) have absolute magnitudes in the range 27 < H < 31
corresponding to diameters D ranging from 2 m< D < 30 m depending on their albedo.
They are on Earth-like heliocentric orbits with semi-major axis 0.7 AU< a < 1.45 AU,
eccentricity e < 0.2 and inclination i < 8◦. The combination of all the dynamical
requirements on the pop1 objects leaves a population with mean ∆v ∼ 4.2 km/s and
∆v . 6 km/s (Shoemaker and Helin 1978).
The ATLAS survey system is under construction and was proposed to include 2 sites
each with 1-4 telescopes. The system is expected to begin survey operations in a couple
years, i.e. early 2015, and is 100% funded by NASA’s NEOO program and 100% dedicated
to identifying NEOs. The nominal limiting magnitude is Vlim = 20.0 with the capability
of surveying 40,000 deg2/night — sufficient to image most of the night sky visible from
Hawaii 4× each night. Current designs for the ATLAS system may more than double that
capability with concomitant implications for the pop1 discovery rate. We modeled the
performance of a northern hemisphere version of ATLAS situated on Haleakala, Maui, HI,
and also a southern hemisphere realization situated on Cerro Tololo, Chile.
The PS2 survey system is the successor to the currently operational PS1 system (e.g.
Chambers 2007) on Haleakala, Maui, HI. PS2 may be operational in mid-2014 and its
survey operations are currently under negotiation. This study assumes that PS2 is a 100%
NEO-dedicated survey and actual performance should be scaled to the realized fraction of
the survey that will be suitable for identifying NEOs. PS2 will correct many of the issues

– 3 –
identified with PS1 and will benefit from a mature hardware and software system. It is
expected to have a limiting magnitude of Vlim = 22.0 and its 7 deg2 field-of-view and rapid
readout time will allow it to image about 3,600 deg2/night. While this is only about 1/11th
the coverage of the ATLAS system the 2 magnitudes greater depth allows the system to
detect the same objects ∼ 2.5× further away than ATLAS. The simulated survey images
the entire night sky visible from Hawaii twice per month.
For each of the simulated systems we studied the impact of both an increase and
decrease of 0.5 mag in the system limiting magnitudes. The decrease in the limiting
magnitude will occur if the systems fail to achieve their specified requirements. An increase
in the limiting magnitude might occur if the surveys were provided extra funding (this is
probably more applicable to ATLAS because it is still at an early enough stage that an extra
infusion of funds could modify the system design) or if they modified their survey strategy
(e.g. longer exposures concentrated near opposition). It must be noted that increasing the
exposure time will increase the limiting magnitude for the detection of stationary objects
but will have less impact on the limiting magnitude for the detection of moving pop1
objects.
Our results suggest that the ATLAS and PS2 surveys will be complementary in
the discovery of pop1 objects assuming that PS2 devotes 100% of its time to the NEO
search. ATLAS will be more effective at finding the pop1 objects but PS2 could improve
its capabilities if more aggressive software algorithms can be implemented to increase
the trail detection efficiency. The nominal pop1 discovery rate should be > 2/month for
ATLAS and about half that rate for the 100% NEO-dedicated PS2 system. Operating an
ATLAS-North and ATLAS-South system in parallel should increase the number of ATLAS
pop1 discoveries by ≥20%.
The pop1 objects are typically discovered in the direction towards opposition but there

– 4 –
is a broad distribution in the discovery location. This is mostly due to the phase angle effect
where objects are brightest towards opposition because they are nearly fully illuminated
(like the full moon). However, ATLAS’s synoptic nightly sky coverage allows it to discover
the pop1 objects at an average angular distance of about 40◦ from opposition while, perhaps
surprisingly, PS2 detects them at an average angular distance of ∼ 30◦ from opposition.
One serious problem was discovered while performing these simulations — the raw
predicted number of synthetic pop1 objects was far too low. The simulations suggest
that the existing PS1 survey should never have found any pop1 objects but it has already
identified several. We attribute the disparity to problems with the NEO orbit element and
size-frequency distribution in the size range of the pop1 objects. The NEO orbit element
model of Greenstreet and Gladman (2012) is strictly applicable only to kilometer-scale
NEOs and the Brown et al. (2002) size-frequency distribution could easily be uncertain by
a factor of a few to an order of magnitude. To reconcile the difference between the model
and the PS1 observations we simply normalized our simulations to the PS1 results. The
normalization factor of ∼ 8 is well within the expected systematic errors in our assumptions,
especially when considering that the PS1 pop1 detection efficiency is essentially unknown.
Most of the results presented herein are after accounting for this normalization factor.
Optical spectroscopic followup of the detected pop1 objects will be challenging. The
best opportunities for pop1 followup will be delivered by the ATLAS system. Only about
30% of the nominal ATLAS system pop1 detections are IRTF-recoverable and the fraction
for PS2 is only 10%. This is because the PS2 system’s deeper limiting magnitude allows
it to detect fainter objects when they are further away but these objects are less likely to
approach close to Earth and become bright enough for IRTF followup. This suggests that
PS2 may find 1-2 IRTF followup targets per year and ATLAS may find 5-10× that number.
The objects are typically available to IRTF for about 4 days during a week long period for

– 5 –
ATLAS and ∼ 12 days for the objects discovered by PS2.
The prospects for radar recovery of the pop1 objects is much better. Essentially all the
ATLAS-discovered pop1 objects are radar-detectable while slightly more than half of the
PS2-discovered objects are also radar-detectable. The objects are typically available for 2-3
weeks after discovery so that scheduling radar followup should not be onerous.
There is a strong bias towards discovering low-∆v objects with the current surveys and
this works to the advantage of the Asteroid Retrieval Mission.

– 6 –
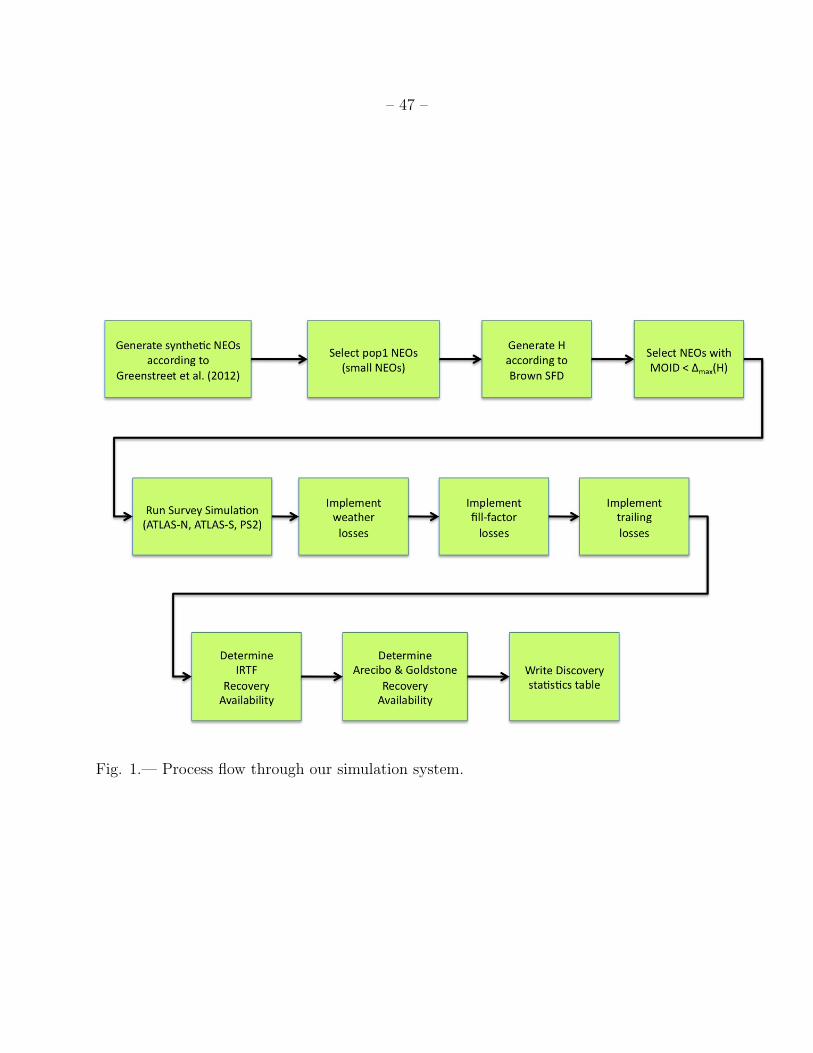
2. Processing pipeline
The high-level processing of the simulation is illustrated in fig. 1. Each of the steps is
described in detail below.
3. The NEO Model
We generated synthetic NEOs for this study according to the Greenstreet and Gladman
(2012) NEO orbit distribution that is currently the best orbit element model for the
NEOs. It corrects several deficiencies of the Bottke et al. (2002) NEO model including 1)
having higher resolution in semi-major axis (a), eccentricity (e), and inclination (i) and 2)
incorporating retrograde NEOs. The first point is particularly important to the detection
of NEOs accessible to human space missions because the Bottke et al. (2002) NEO model
includes relatively few bins covering the range of interesting NEOs.
The Greenstreet and Gladman (2012) NEO model uses the same weighting of the
different NEO sources as the Bottke et al. (2002) model but they used higher resolution,
higher statistics integrations. The differences between the orbit distributions in the models
are typically small as illustrated in fig. 2. The biggest difference is at small inclinations
(i < 10◦) where the Greenstreet and Gladman (2012) NEO model predicts fewer NEOs
than Bottke et al. (2002). This is in the opposite direction of the Mainzer et al. (2011) NEO
results that suggests that there are more NEOs at small inclination than predicted in the
Bottke et al. (2002) NEO model. So both the Bottke et al. (2002) and the Mainzer et al.
(2011) NEO models would yield more objects in the i < 10◦ bins of interest to this study.

– 7 –
3.1. Population 1 (pop1) - robotic retrieval mission targets
The synthetic NEOs were restricted to dynamically accessible mission targets (pop1)
based on 5 criteria provided by Chodas et al. (personal communication):
1. 0.7 AU < p < 1.05 AU
2. 0.95 AU < q < 1.45 AU
3. 2.99233 < TE < 3.01
4. e > −1.40591 aAU
+ 1.33562
5. e > +0.89132 aAU− 0.93588
where p = a(1 − e) and q = a(1 + e) are the object’s perihelion and aphelion distances
respectively, and TE is the object’s Tisserand parameter with respect to Earth given by
TE =AU
a+ 2 cos i
√a
AU(1− e2). (1)
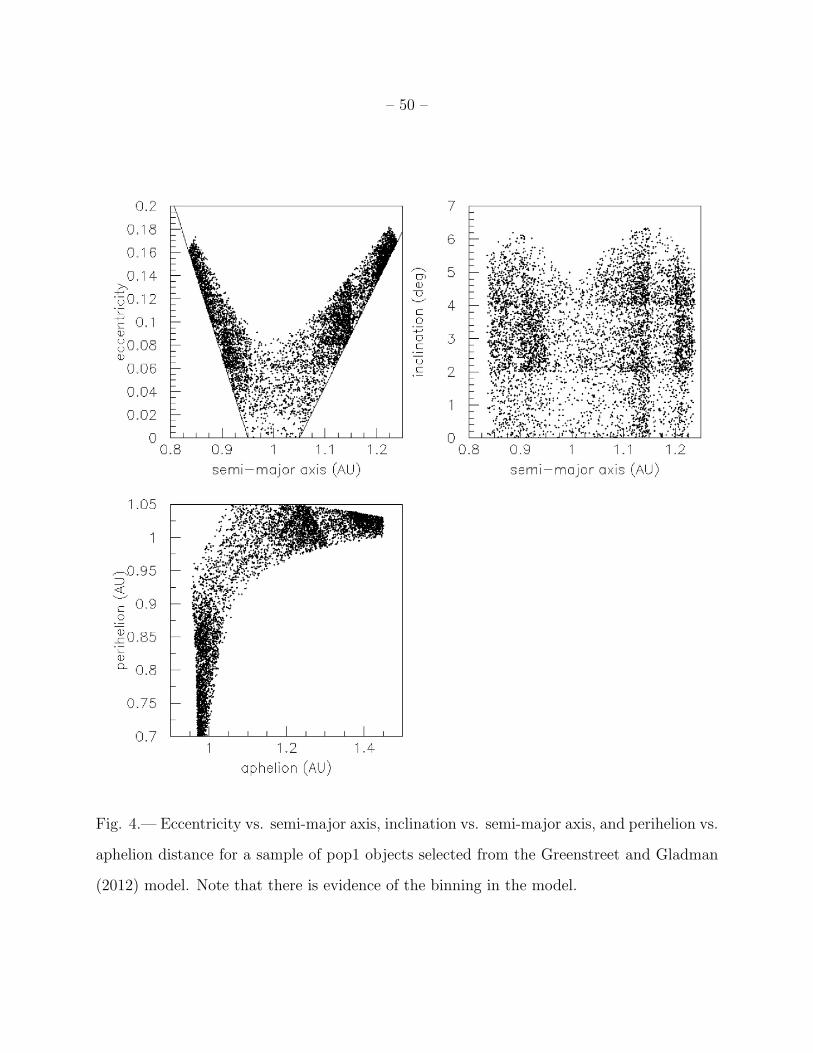
The dynamical cuts eliminate ∼99.9970% of NEOs in the model (fig. 3) and select
NEOs with semi-major axis close to Earth’s (a ∼ 1 AU), small eccentricity and low
inclination as illustrated in fig. 4. i.e. a fraction fpop1 = 0.000030 of NEOs pass the pop1
selection cuts. There is still evidence of the binning in the Greenstreet NEO model in the
latter figure.
3.2. smooth pop1
JPL was concerned about the residual binning evident in fig. 4 so we developed a
smoothed pop1 model that is used throughout the remainder of this report.

– 8 –
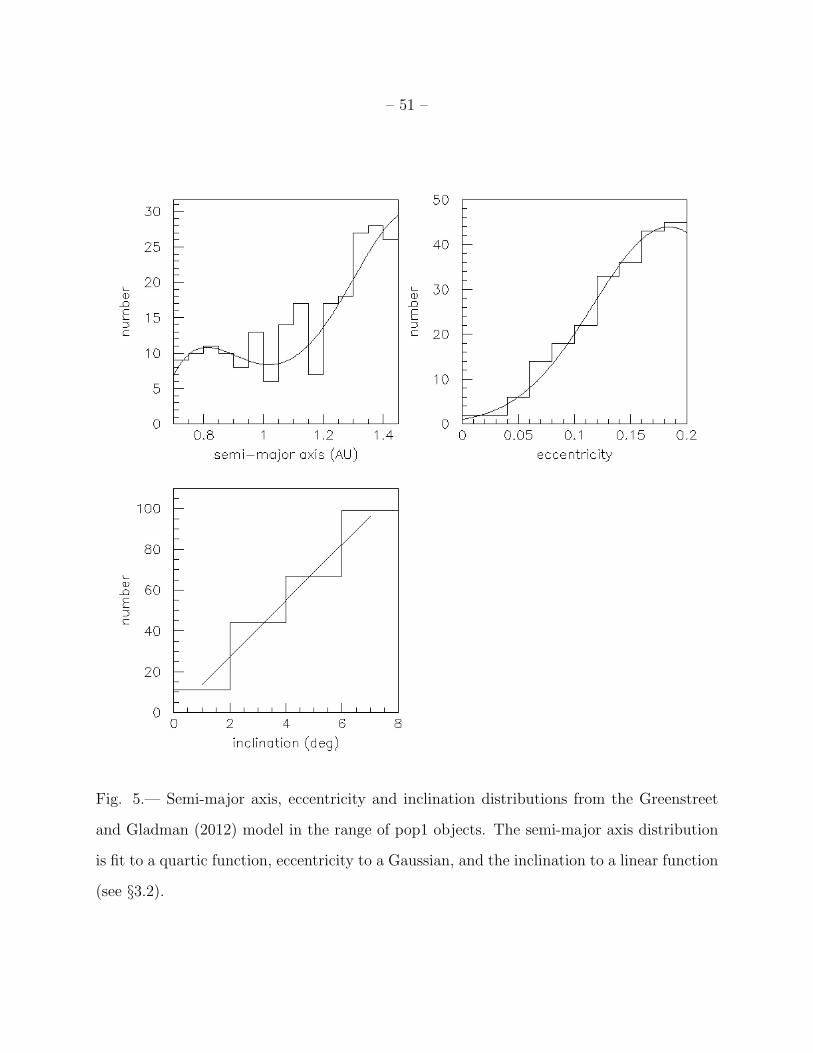
Figure 5 shows fits to the semi-major axis, eccentricity and inclination distributions
for the Greenstreet and Gladman (2012) NEO model in the range of pop1 objects. The
semi-major axis distribution was fit to a quartic function of the form
fa(a) = −893.337 + 3563.68 (a/AU)1 − 5141.61 (a/AU)2 + 3204.28 (a/AU)3 − 724.582 (a/AU)4,
(2)
the eccentricity to a gaussian of the form
fe(e) = 43.9115 exp−12( e−0.184212
0.067361)2
, (3)
and the inclination to a line forced to be zero at i = 0◦
fi(i) = 13.7509 (i/deg)1. (4)
Of course, the normalization of each of the functions is immaterial when generating random
a, e and i. We verified that the distributions in each parameter are roughly independent of
the others and then generated random sets of (a, e, i) and applied the pop1 dynamical cuts
to select NEOs in our smooth-pop1 sample. The distribution of the smooth-pop1 sample is
illustrated in fig. 6.
The purpose of the pop1 sample is to select NEOs with low ∆v as amply illustrated in
fig. 7. The pop1 NEOs are not representative of the orbit and ∆v distribution of the entire
NEO sample.
3.3. pop1 absolute magnitudes (H)
The absolute magnitudes of the pop1 NEOs is restricted to the range 27 ≤ H < 31
corresponding to diameters (D) in the range 2 m< D < 30 mdepending on their albedo. We
generated synthetic objects in each of eight 0.5 magnitude wide bins and assigned each an
absolute magnitude within the bin with a probability ∝ 100.54H appropriate for objects in

– 9 –
the size range as measured by Brown et al. (2002) (see fig. 9). The number of generated
pop1 NEOs (table C) was selected so that the survey simulation (see §4 below) would
detect about 100 objects per bin.
It is important to stress that the SFD of NEOs in the pop1 range is not well determined
with a factor of 10 uncertainty being entirely possible. While we were instructed to use
the Brown et al. (2002) NEO SFD there are other options as illustrated in fig. 8 (Stuart,
personal communication). The Mainzer 2011 distribution (Mainzer et al. 2011) was never
intended to be extrapolated down to the pop1 size range but is included to illustrate that
this type of extrapolation is typically unjustified. The Stuart 2001 distribution (Stuart
2001) is also an extrapolation to the pop1 size range from larger sizes but in this case could
be considered a lower bound to the number of objects in the pop1 range. The Brown 2002
distribution (Brown et al. 2002) is used in this work. We regard it is as best measurement
of the SFD in the pop1 range but would not be surprised to learn that the real distribution
is considerably different due to problems with debiasing the space sensor data or difficulties
in converting from the detected radiant energy to absolute magnitude. The Harris 2009
distribution is a fit to Alan Harris’ (unpublished but widely distributed) 2009 population
model using 3 straight lines. Finally, the Harris 2012 distribution is from Alan Harris’
(unpublished) 2012 population model.2 Finally, the JPL distribution corresponds to the
H = 24 distribution from fig. 20. It is included here because it i) appears to be a good
representation of the Harris 2012 distribution and ii) was the ‘original’ SFD used in the
preliminary powerpoint reports provided in this work effort.
2presented at the 2013 Planetary Defense Conference, Flagstaff, AZ

– 10 –
3.4. pop1 MOID selection
Most of the generated pop1 objects are impossible to detect with existing ground
based facilities because of their small sizes despite being selected for low ∆v. Thus, to
reduce the computation time for the survey simulations described in §4, we eliminated all
generated pop1 objects with Minimum Orbit Intersection Distance (MOID) greater than
the maximum distance at which an object with the generated absolute magnitude can be
detected. The maximum distance is (usually) determined by the object having its brightest
apparent magnitude (V ) when fully illuminated at opposition (i.e. zero phase angle (α),
Jedicke et al. 2003). Thus, we select objects from the pop1 sample that satisfy
V (H,∆ = MOID, α = 0) < Vlimit (5)
before running them through the survey simulation where Vlimit is the limiting magnitude
of the surveying system. This is equivalent to requiring that MOID < ∆(H) where ∆(H) is
the H-dependent maximum distance at which the object can be detected.
3.5. Population 2 (pop2) - Human Mission Targets
We were instructed by JPL to defer the pop2 study. They will not be mentioned again
in this report.
4. Survey Simulations
In this section we describe how we modeled the performance of the upcoming ATLAS
and PS2 surveys (see Tonry et al. (2012) and Morgan et al. (2012) respectively).
Each of the simulations is run in 3 different modes because neither of the surveys
is operational or fully constructed: a ‘nominal’ configuration at the expected limiting

– 11 –
magnitude, an ‘optimistic’ configuration with a limiting magnitude 0.5 mags higher than
expected, and a ‘pessimistic’ configuration with a limiting magnitude 0.5 mags lower than
expected. The ‘+0.5’ configuration might actually be achieved with system improvements
while the ‘-0.5’ configuration could reflect reality if there are problems with the system.
4.1. ATLAS
The Asteroid Terrestrial-impact Last Alert System (ATLAS, Tonry et al. 2012) has
the ambitious goal of surveying the entire night sky visible from its location 4×/night. The
design of the system is not yet finalized but it will use two sets of 1 to 4 small telescopes
with extremely wide fields-of-view (FOV). Each set may image 80 deg2 in each exposure
and reach Vlimit ∼ 20.0 (after stacking images from the telescopes within a set). Since the
system is not yet designed (let alone built) we have developed a survey simulation that
is relatively modest compared to what is expected. The baseline ATLAS system will cost
about $5M to design, build and operate over 5 years with all the funding provided by
NASA’s NEOO Program Office.
ATLAS is envisioned as an expandable system at a modest cost of roughly $1M/unit.
With more of these system distributed around the world in both longitude and latitude
it could achieve truly continuous coverage of the entire sky. With this in mind, we have
modeled both an ATLAS-North (ATLAS-N) and ATLAS-South (ATLAS-S) system as
described in the next subsection.
The key aspects of the nominal ATLAS-N survey simulation are
• situated on Halekala, Maui, at the location of PS1 (observatory code F51)
The actual location is still TBD but sites in Hawaii are most likely.
• 30 s exposures with 10 s readout time

– 12 –
• Vlimit = 20.0 (nominal)
we assume that the detection efficiency is constant for V < Vlimit and zero for
V ≥ Vlimit. The detection efficiency at bright magnitudes is determined by the fill
factor, image processing system and trailing losses described below.
• 40 deg2 FOV
This is the nominal design specification for the ATLAS system. They are currently
considering optical system designs that can deliver twice the FOV.
• 2 year simulation beginning 2015 January 1
• bore sites arranged so that FOVs cover the entire sky
• 10,000 deg2/night (i.e. imaged 4×)
Surveying most of the night sky every night.
• Transient Time Interval (TTI) ∼15 minutes The average time between
successive exposures at the same bore site.
• phase-dependent moon avoidance angle The minimum angular distance to the
moon increases with the moon’s phase.
• favor ecliptic fields
• no avoidance of galactic equator
• > 30◦ altitude
• nightly scheduling performed with Tools for Automated Observing (TAO3)
All the above are implemented in TAO so we have a nightly stream of bore site
3http://sites.mpc.com.br/holvorcem/tao/readme.html

– 13 –
locations and times specific to the night, moon, etc. Figure 10 shows the realized
survey pattern on four nights.
• Moving Object Processing System (MOPS, Denneau et al. (2013))
We used the PS1 MOPS to simulate the performance of the ATLAS survey. It takes
as input a list of boresites and times, FOV, the list of orbit elements and absolute
magnitudes for the objects, and determines which objects appear in which fields and
their apparent magnitudes and rates of motion. MOPS was designed to account for
many surveying factors like tracklet identification efficiency, fill-factor, weather, etc.,
but we accounted for these factors in post-MOPS processing as described in the next
three items.
• tracklet identification efficiency
Tracklets are sets of detections obtained in a short period of time (usually within 1-2
hours) associated with an individual object. They are the ‘units’ that are reported
to the MPC as candidate asteroid observations. Tracklet identification efficiency is a
combination of several factors including the camera’s fill factor, the stellar sky-plane
density, image processing detection efficiency, etc. ATLAS will use either a single
monolithic CCD or a small number of large CCDS so the fill factor, the fraction of
the focal plane instrumented with live pixels, will be close to unity. Most modern
asteroid surveys achieve very high detection efficiency for sources that are brighter
than the limiting magnitude when they appear on live pixels. Therefore, we assumed
95% detection efficiency for ATLAS brighter than the limiting magnitude — almost
certainly an underestimate.
• trailing losses
An object can move across the image so fast that it leaves a small ‘trail’ during even
short exposures. We refer to the reduction in tracklet identification efficiency due

– 14 –
only to its rate of motion as ‘trailing losses’. The effect is evident in real data as
illustrated for PS1 in fig. 12 — PS1 has never4 reported an NEO to the MPC that is
moving faster than 5◦/day. ATLAS will have ∼ 4′′ pixels and ∼ 3′′ PSF so trailing
losses begin when the source moves ∼ 2 pixels during the exposure. ATLAS will have
trail detection software so we expect that trailing losses will not be important for
objects moving at < 10◦/day. At faster rates of motion we assume a trailing loss as a
function of rate that is half that of the PS1 system as shown in fig. 11. We think this
is justified by the larger pixel scale and the anticipated use of trail-detection software.
• NEO identification
Contemporary asteroid surveys rely on the MPC NEO ‘digest’ score that is, essentially,
the probability that a real tracklet is a NEO if it can not be associated with a known
asteroid. The surveys typically submit and follow-up NEO candidates only when the
NEO digest score passes a threshold (like 50% or 90%). Thus, some NEOs ‘hide in
plain sight’ by virtue of being detected but having otherwise mundane locations and
rates of motion. This is not an issue for pop1 objects as shown in fig. 12 — virtually
all pop1 NEOs are moving so fast when they are detected that their digest score will
always be ∼ 100. We therefore do not need to ensure that the pop1 objects in our
simulations will be identified as NEOs.
• realistic weather & system downtime
4During the writing of this report, after more than two years of operations, the PS1 false
detection rate dropped low enough that the MOPS was able to relax an internal constraint
on a tracklet’s great circle residual (GCR). The relaxed threshold now allows faster moving
trails to be detected. Since the ATLAS & PS2 trailing losses are tied to the PS1 trailing
losses it will have little effect on the relative results reported here but will cause an (small)
increase in the overall discovery rate.

– 15 –
We use a realistic weather stream measured for Haleakala as shown in fig. 13. The
weather stream and observing metric are provided nearly continuously in 5 minute
time steps. We also know that over the course of roughly two years PS1 realized
a 53% observing efficiency i.e. 53% of the night time was used for observing after
accounting for all losses including weather and system downtime. We therefore utilize
the weather stream to select the 53% of half-night intervals that are ‘observable’ and
this simply requires that we require the observing metric to be > 0.07 as illustrated
in fig. 14. We note that it may not be fair to hobble ATLAS by forcing it to have the
same system downtime as PS1. ATLAS is a considerably simpler system that will be
designed from the outset for remote and robotic automated operations. We do not
anticipate that it will suffer from the same downtime as PS1
4.2. ATLAS-South
We have also implemented an ATLAS-South survey with exactly the same performance
characteristics as those described above except that the survey is located at Cerro Tololo
in Chile with observatory code 807. The survey pattern for a single full moon night is
illustrated in fig. 15 but we stress that this is not the pattern that would be used if there
really were multiple ATLAS sites in the two hemispheres. The current pattern has far too
much overlap with the ATLAS-North survey. A more rational coverage would require each
site to survey only north or south of the equator unless the other site is clouded out, in
which case the clear site should survey as much of the ecliptic as possible. Furthermore, the
entire sky will be easy to cover with ATLAS systems operating in both hemispheres and so
the entire sky could be imaged to a fainter limiting magnitude.

– 16 –
4.3. Caveats
Finally, we stress that we have purposefully under-estimated ATLAS tracklet detection
efficiency and the anticipated survey coverage, and over-estimated the system downtime so
as not to exaggerate the system’s simulated performance.
4.4. PS2 (Morgan et al. 2012)
PS2 is the successor to the currently operational Pan-STARRS prototype telescope
(PS1) on Haleakala, Hawaii (e.g. Chambers 2012). PS1 is widely believed to be an asteroid
survey but is actually a multi-purpose survey. The specifications of this study were that we
consider a NEO-dedicated PS2 system.
It is expected that PS2 will correct many of the issues discovered with the prototype
especially with regard to the CCD focal plane. Furthermore, it is expected that the image
processing pipeline will be improved and they should achieve a limiting magnitude of
V = 22.0 for their 1.8 m diameter primary.
The NEO-dedicated PS2 survey simulation was developed by PS2 personnel. The key
aspects of the nominal PS2 survey simulation are:
• situated on Halekala, Maui, at the location of PS1 (observatory code F51)
The real PS2 system will be located only a few tens of meters from the PS1 dome.
• 30 s exposures with 10 s readout time
• Vw,limit = 22.0 and Vz,limit = 21.0 (nominal)
PS2 will be outfitted with six filters but the survey simulation uses only two that
are optimized for NEO discovery under dark and moon-lit conditions — the wP1
and zP1 filters respectively. The wP1 filter is a very wide filter (= gP1 + rP1 + zP1)

– 17 –
optimized for asteroid detection while the zP1 filter is a near-IR filter suitable for high
sky-background conditions. We assume that the detection efficiency is constant for
V < Vlimit and zero for V ≥ Vlimit. The detection efficiency at bright magnitudes is
determined by the fill factor, image processing system and trailing losses described
below.
• 7 deg2 FOV
• 2 year simulation beginning 2015 January 1
• bore sites arranged so that FOVs cover the entire sky
The PS2 survey simulation includes special surveys of the ‘sweet spots’ for the
detection of Potentially Hazardous Objects (PHO). The sweet spots are two patches
of sky from 60◦ to 90◦ from the Sun and within 20◦ of the ecliptic.
• 900 deg2/night (i.e. imaged 4×/night)
The actual survey pattern and algorithm are complicated but the basic idea is that,
assuming perfect weather, the entire night sky is imaged on two nights in each
lunation. Visits to the same bore site within a lunation are separated by 3 nights.
• Transient Time Interval (TTI)
Typically ∼20 minutes except for images in the sweet spots with TTI∼8 min. The
TTI is also shortened slightly when surveying more than 90◦ from opposition and
more than 20◦ from the ecliptic.
• phase-dependent moon avoidance angle
At full moon wP1 survey fields are no closer than 120◦ to the moon while the zP1
survey fields are no closer than 60◦. The minimum angular separation of the field
from the moon decreases with the moon’s phase angle.

– 18 –
• no surveying within 10◦ of the galactic equator
The stellar sky-plane density is so high in the galactic plane at PS2’s limiting
magnitude that the asteroid detection efficiency drops dramatically.
• > 30◦ altitude
• nightly scheduling performed with Tools for Automated Observing (TAO5)
All the above are implemented in TAO so we have a nightly stream of bore site
locations and times specific to the night, moon, etc. Figure 16 shows the realized
survey pattern for a single night.
• Moving Object Processing System (MOPS, Denneau et al. 2013)
We used the PS1 MOPS to simulate the performance of the PS2 survey.
• tracklet identification efficiency
The realized PS1 tracklet efficiency at bright magnitudes is about 75% due mostly to
the fill factor — about 20% of the PS1 camera focal plane is occupied by gaps between
the CCDs, gaps on the CCDs themselves, and dead or inactive pixels. It is expected
that the PS2 camera will be cosmetically superior to the PS1 camera and we assumed
80% detection efficiency for PS2 detections brighter than the limiting magnitude.
• trailing losses
We assume that PS2 trailing losses will be similar to those measured for PS1 as shown
in fig. 11. Trailing losses begin at about 0.5◦/day due to the over-sampling of the PS2
PSF. (see footnote 4)
• NEO identification
PS2’s fainter limiting magnitude relative to ATLAS allows it to detect objects when
5http://sites.mpc.com.br/holvorcem/tao/readme.html

– 19 –
they are further away and therefore moving slower (in part alleviating trailing loss
affects described above) but they are still moving fast enough to be easily and mostly
unmistakably identified as NEOs. (See fig. 11.)
• realistic weather & system downtime
We use the same technique as described for ATLAS.
The PS2 survey simulation is in some respects of higher fidelity than the ATLAS
survey simulation. In particular it 1) uses separate filters and limiting magnitudes under
bright sky conditions when surveying close to the moon and 2) is based on the measured
pedigree of the operational PS1 system. We hope that PS2 will have a higher than 53%
overall operational efficiency but since this efficiency was applied to both the ATLAS and
PS2 simulations at least the relative performance of the two surveys in this study can be
easily compared.
5. Discussion
5.1. MOID selection effects
Only those pop1 objects that can possibly be detected by each of the systems described
above were pre-selected before running them through the survey’s MOPS simulation (based
on their MOID as described in §3.4). Figure 17 shows that roughly twice as many pop1
objects in each H bin are detectable by PS2 as compared to ATLAS by virtue of PS2’s
fainter limiting magnitude.

– 20 –
5.2. Detection efficiency & survey strategies
The pop1 objects are so small and pass by Earth so quickly that detecting them is very
difficult as illustrated in fig. 18 that shows the annual pop1 detection efficiency as a function
of H: εpop1(H). Our results suggest that only ∼0.1% of even the largest pop1 objects
are detected annually. We will show below that this results in very few pop1 discoveries
according to our simulations but there is an inconsistency between our model and the
current results from the PS1 system. There is good agreement between the calculated
efficiencies for ATLAS-North and South because the systems are essentially identical except
for their location and they survey mostly the same region of sky.
The ATLAS system has a higher overall pop1 detection efficiency than PS2 due to
being less sensitive to weather and trailing losses as illustrated in fig. 19. PS2 detects more
pop1 objects than ATLAS when we do not account for weather, system losses, tracklet
detection efficiency and trailing losses because it images the entire sky twice per month at
a greater depth than can be achieved by ATLAS each night. The problem is that PS2 will
not find the pop1 object if it is not in the field when the weather is good and the system is
operational or if it is moving too fast — and it only has a couple opportunities each month
to detect an object. While ATLAS does not image the sky as deeply, its nightly coverage of
the entire sky and large pixels yield an overall better efficiency than PS2.
There is nothing that can be done about the weather. Furthermore, as described above,
we expect both ATLAS and PS2 to have less system downtime than PS1 (that was used to
model the system behavior). But both effects will affect our ATLAS and PS2 simulations
identically and therefore not affect the relative performance comparison. Furthermore, in
our simulations there is only ∼ 15% difference in the tracklet detection efficiency (80% vs.
95%) and even if we invoke a claim that ATLAS will actually perform even better than the
nominal 95% it still makes only a small difference on the relative performance.

– 21 –
We think that PS2 has two opportunities for improving its overall efficiency: 1) modify
the survey strategy or 2) implement an aggressive trail identification algorithm. There are
numerous ways to modify the PS2 survey strategy to make it more effective for identifying
pop1 targets and the two most obvious are: A) eliminate field coverage far from opposition
and the ecliptic poles in order to provide 3× coverage of each field that remains and/or B)
decrease the exposure time to obtain more visits to each bore site during each lunation.
Option A should provide less susceptibility to weather and compensate for the tracklet
detection efficiency. Selecting optimal ranges in ecliptic longitude and latitude should be
relatively straightforward. Option B basically turns PS2 into ATLAS and is an ineffective
use of the system’s design characteristics.
There are also opportunities for improving ATLAS pop1 discovery performance. The
ATLAS survey specification in §4.1 reproduces the expectations at the time of the original
NASA NEOO proposal. Current ATLAS telescope and camera designs suggest that the
survey speed could be improved by a factor of ∼ 2. i.e. ATLAS could double the amount of
sky surveyed per night or increase the exposure time per field. Since the modeled ATLAS
survey already covers most of the sky of concern for pop1 objects it makes more sense to
devote the increased survey speed to increasing the system limiting magnitude. Similarly,
ATLAS could improve the survey limiting magnitude by foregoing surveying at high ecliptic
latitude or longitudes far from opposition. Furthermore, as mentioned in §4.2 there are
better ways to co-ordinate observations between an ATLAS-North and ATLAS-South
system that would certainly yield a higher pop1 detection efficiency.
5.3. Predicted annual discovery rates
The overall annual pop1 detection efficiency as a function of absolute magnitude with
respect to the entire NEO population is given by ε(H) = fpop1 εpop1(H). (fpop1 = 0.000030

– 22 –
was introduced in §3.1 and is the fraction of NEOs that pass the pop1 selection cuts.) The
annual number of detections in bins of width ∆H is simply
n(H) ∆H = ε(H) N(H) ∆H (6)
where n(H) and N(H) are the observed and actual number density of objects with respect
to H in the NEO population.
The debiased number of NEOs as a function of absolute magnitude has been measured
by various groups but the Statement of Work (see §A) requires that this study use the
distribution measured by Brown et al. (2002) for Earth-impacting asteroids. They calculate
that the cumulative number of impacting asteroids larger than diameter D (in meters) is
given by
logNimp(D) = c0 − d0 log(Dm
)(7)
with c0 = 1.57±0.03 and d0 = 2.70±0.08 valid for 22 < H < 30. We convert from diameter
to absolute magnitude (H) using
D
m=
106.1295
10H/5√p
(8)
where p is the geometric albedo. Our convention follows standard usage where an H = 17.75
object corresponds to an average diameter of 1 km which requires that p = 0.14421. We
then find that the cumulative number of objects with absolute magnitude < H impacting
Earth per year is given by
logNimp(H) = −16.117 + 0.54H. (9)
Brown et al. (2002) also claim that the annual impact frequency for NEOs is 2× 10−9/year
so that the total number of NEOs with absolute magnitude < H in the NEO population is
logNC(H) = −7.117 + 0.54H (10)
where NC represents the cumulative number as compared to the number density N(H)
from eq. 6. Clearly, N(H) ≡ dNC(H)/dH.

– 23 –
We consider the normalization factor (2×10−9/year) from the small impacting asteroids
to the entire NEO population to be a major source of systematic error in this analysis. The
normalization factor was calculated from ‘the average probability of impact for the 1,000
largest known near-Earth asteroids’ in 2002. Due to the different orbit distributions of the
small impacting asteroids compared to the large (and mostly non-impacting) 1,000 largest
known NEOs that certainly have a very different impact probability than the small NEOs
in this and the Brown et al. (2002) study.
Consider that the Bottke et al. (2002) NEO SFD for objects with H < 23 is ∝ 100.35
but the Brown et al. (2002) study states that the SFD is ∝ 100.54 for 22 < H < 30.
Furthermore, Mainzer et al. (2011) suggest that the SFD becomes shallower than the
Bottke et al. (2002) model for 100 m < D < 1,000 m. Thus, there must be a transition
from a shallow to steep slope somewhere in the range 22 < H < 27. Granvik et al. (2012)
reconciled the difference in slope between the Brown et al. (2002) and Bottke et al. (2002)
NEO distributions by assuming that the break in the SFD occurs at H = 24 as shown in
fig. 20. i.e. the SFD follows Bottke et al. (2002) to H = 24 and the Brown et al. (2002) SFD
for H ≥ 24. If the break and normalization were at smaller H than the predicted number
of objects at absolute magnitudes larger than the break would be higher (see fig. 20). If
the break occurs at H = 22 the predicted number of NEOs increases by a factor of ∼ 2.5
compared to the number with a break at H = 24. There is about a factor of 6 difference
between the nominal Brown et al. (2002) SFD and the model with the break at H = 24.
Despite our concerns about the NEO model normalization our model from the
Statement of Work is the nominal Brown et al. (2002) SFD. Using that distribution, our
calculated annual detected number of pop1 objects as a function of absolute magnitude
(n(H), see fig. 21) peaks near H = 28.25 for ATLAS and near H = 27.25 for PS2 and shows
that ATLAS detects more pop1 objects than PS2 in every bin. The peak exists because

– 24 –
the detection efficiency decreases faster with H than the size of the population increases
and the location of the peak is determined by each system’s efficiency (see fig. 18). The
total annual number of discovered pop1 objects is predicted to be about 4 for the ATLAS
systems and ∼ 2 for PS2 as shown in fig. 22.
5.4. Comparison with PS1 observations
‘The PS1 system limiting magnitude’ is difficult to quote because the survey uses
multiple filters under widely varying observing conditions but the limiting magnitude in
the wP1 filter, used to make the vast majority of asteroid discoveries, is . 21.5 in V . It can
therefore be loosely compared with the results of the PS2-0.5 survey simulation described
herein. PS1 has actually discovered 3 NEOs that meet the pop1 criteria even but our
PS2-0.5 simulation predicts that it should discover ∼ 0.7/year. At first glance the values are
not necessarily inconsistent but we will show that they reveal a discrepancy in the fidelity
of our simulation.
First, PS1 is not a dedicated NEO survey. While the non-NEO survey component of
the PS1 survey can be used to identify NEOs it is much less efficient at doing so and the
fraction of time devoted to the solar system survey has changed with time. We estimate
that the effective fraction of PS1 solar system survey time is about 25% i.e. the system
could discover about 4× more NEOs if it was dedicated to the NEO program. Furthermore,
it is difficult to quantify the effective duration of the survey because the system has ramped
up its capabilities over time. We estimate that the effective survey duration is about 2 years
for comparison with this work. Thus, a NEO-dedicated PS1 telescope might have detected
6 pop1 objects per year (= 3 pop1 object in 2 years of surveying at 25% efficiency6). Note
6Our estimates for the effective surveying time and NEO survey fraction are simply

– 25 –
that this is ∼ 8× our predicted value!7
We regard the factor of 8 discrepancy between our PS2-0.5 simulation and the actual
PS1 performance as explicable by factors already described above:
1. a factor of ∼ 4 due to the differences between the Greenstreet and Gladman (2012),
Bottke et al. (2002) and Mainzer et al. (2011) orbit distribution models (particularly
at low inclination),
2. the adoption of the Bottke et al. (2002) orbit distribution model suitable for large
NEOs for the small pop1 objects,
3. our estimate of the ‘effective’ PS1 NEO survey efficiency and comparison to the
PS2-0.5 survey simulation.
5.5. Normalized annual discovery rates
We have implemented a normalization to our predicted annual discovery rates to
account for the discrepancy between our simulation and the PS1 pop1 discoveries such
that the PS2-0.5 simulation discovers 6 pop1 objects annually as shown in fig. 23. With
educated guesses. Both may be in error by up to about 50%.
7Careful readers will note that the preliminary reports had much larger disparities. There
are 2 reasons for the drop from the previously reported value of ∼ 100 to ∼ 8: 1) we identified
a bug in the MOPS software that caused a failure to load all the zP1 survey fields (a factor
of 2) and 2) we adopted the Brown et al. (2002) NEO SFD rather than the Granvik et al.
(2012) implementation of the Brown et al. (2002) NEO SFD (another factor of 6 as described
in §5.3).

– 26 –
this normalization factor the nominal PS2 system identifies more than one pop1 object per
month while ATLAS identifies about half a dozen per month.
We note that if ATLAS can achieve an increase in limiting magnitude by 0.5 mags that
it will double its discovery rate to about a dozen pop1 targets per month. A similar 0.5 mag
increase in the PS2 limiting magnitude will more than double its pop1 discovery rate but
even so it will find only about as many pop1 objects as the nominal ATLAS system.
The normalized annual discovery rate as a function of absolute magnitude is shown in
fig. 23.
5.6. ATLAS-North + ATLAS-South
Figures 21-24 show that our simulated crude version of a dual-hemisphere ATLAS
system would detect 10-20% more pop1 objects than either single-hemisphere system. We
stress that our estimate is clearly a lower limit to the benefits of dual-hemispheric coverage
as our ATLAS-North and ATLAS-South survey strategies do not take advantage of the
other as described in §4.2. The impact of our inefficient survey strategy is two-fold: 1)
when one site is weathered out the other site can survey the most important region of the
sky near opposition ensuring ‘continuous’ surveying and 2) when both sites are operational
they can avoid each other’s survey region to maximize the total sky coverage or increase
the survey depth to identify pop1 objects at larger distances.
5.7. Survey overlap
ATLAS has been promoted as being complementary to the Pan-STARRS NEO effort
and this claim is supported by our analysis of the overlap in detected objects between the

– 27 –
ATLAS-North, ATLAS-South and PS2 systems in each of the nominal and nominal±0.5
configurations as illustrated in fig. 25. In this analysis we assume that all 3 systems are
surveying at the same time in the same configuration with respect to their nominal limiting
magnitudes.
The ATLAS-North and ATLAS-South systems each uniquely identify about 10% of all
the detected pop1 objects regardless of the limiting magnitude configuration. Furthermore,
about 11% of all the discovered pop1 objects are detected by all 3 systems, again without
regard to configuration. The biggest effect is that as the systems’ limiting magnitudes
are increased in tandem from -0.5 mag, to 0 mag, to +0.5 mag the fraction of uniquely
discovered objects by PS2 increases from 19%, to 22%, and 28% respectively.
5.8. ∆v selection effects within pop1
Figure 26 shows that there is a strong selection effect for the simulated systems to
discover lower ∆v objects within pop1. This is presumably because the lower ∆v objects
are moving slower when near the Earth and spending more time in the surveys’ search
volumes.
However, fig. 27 shows that the mean ∆v of synthetic discovered objects with the
ATLAS-S+0.5 system is close to the pop1 average and there is not a strong trend with
absolute magnitude. We note that the faintest/smallest two H bins have the smallest
RMS and the mean in those bins is many σ from the pop1 mean but it is not clear that
the standard error on the mean should be considered as a definitive test given that that
distribution is strongly non-guassian.
In other words, the systems identify objects with lower ∆v but the ∆v distribution is
only weakly dependent on the absolute magnitude.

– 28 –
5.9. IRTF spectroscopic follow up
Once a pop1 object is identified it will be important to obtain follow up spectroscopic
observations. We were instructed to examine the follow up windows with the IRTF after
discovery. We used an IRTF spectroscopic follow up limiting magnitude of V = 18.5 (Bin
Yang, personal communication).
Figure 28 shows several observable properties for a particular pop1 object after
discovery with the nominal ATLAS-North system. The general behavior is common to
many objects discovered by the system that subsequently become observable with IRTF.
The discovered object typically (but not always) becomes brighter — it usually must do so
in order to be brighter than the IRTF limiting magnitude unless the object happens to be
discovered near peak brightness. Furthermore, because the objects are so small, they are
typically discovered near opposition at small phase angles and large solar elongation.
We were initially surprised that the fraction of targets discovered by each system that
are accessible for followup by IRTF decreases as the system’s limiting magnitude increases
(see fig. 29). We attribute this effect to the fact that a deeper limiting magnitude allows
detection of the small objects at larger distances but this does not mean that they will
necessarily enter into the followup volume accessible to IRTF. Indeed, the objects discovered
with the more capable systems are less likely to be recovered by IRTF.
The effect is particularly important for the followup of objects discovered by PS2. It’s
2 magnitude fainter limit allows it to detect small objects when they are much further
away but this means that a larger fraction of the discovered objects are too faint for IRTF
followup.
The total number of followup targets increases with the system limiting magnitude
despite the reduction in the fraction of recoverable objects as illustrated in fig. 29. The
– 29 –
simulations suggest that the ATLAS systems might detect about one pop1 object per month
that can be characterized with IRTF but the PS2 system might detect only a few per year.
Once an object is available for IRTF followup it is desirable that it remain available for
as long as possible. We find that the average window ‘width’ for IRTF followup is about
4 to 5 days independent of the survey system and the survey system limiting magnitude.
There is a small but statistically significant decrease in the average window length as the
survey system’s limiting magnitude improves (goes to larger values). We again attribute
this to the fact that the improved systems detect the objects when they are further away
and less likely to spend time in the volume accessible to IRTF.
The ATLAS-South performance is typically slightly less than the ATLAS-North
performance because some of the pop1 objects detected in the southern hemisphere simply
never appear in the northern hemisphere’s sky or have dropped in brightness before they
do.
Finally, the length of time during which IRTF followup is possible is different than
the time between discovery and the closing of the followup window (window ‘duration’) as
illustrated in fig. 30. The duration is significantly longer for the PS2 survey because when
PS2 discovers a pop1 object that will become observable with IRTF, it does so when the
objects are further away and the window opens up a few days after discovery. This could
provide an advantage over ATLAS in that it allows more time to react to the discovery to
schedule the followup.
The relative fraction of discovered pop1 objects discovered by the ATLAS and PS2
systems as shown in fig. 25 would change dramatically in favor of the ATLAS system if
IRTF followup was required.

– 30 –
5.10. Arecibo & Goldstone radar follow up
Paul Chodas provided us some pseudo-code to calculate radar signal-to-
noise ratio (SNR) for both the Arecibo and Goldstone facilities but we never
succeeded in converting it to operational code. Instead, we resorted to a sim-
ple fit to the Arecibo SNR from a figure available online from Lance Benner
(http://echo.jpl.nasa.gov/ lance/snr/far asnr18.gif) reproduced in fig. 31.
We found that we can reproduce the H = 26 curve (most appropriate to the lowest range
of the pop1 objects) using an S-class albedo of p = 0.155 and
SNRArecibo =1
2.5
(Dkm
)2(AU∆
)4
(11)
where D is the object’s diameter and ∆ is its geocentric distance. Substituting for D we
find
SNRArecibo =1
2.5
( 1347
10H/5√p
)2(AU∆
)4
(12)
In our simulations we use p = 0.14421 as in §5.3. Since the area of the Goldstone
facility is about 1/20th the area of the Arecibo facility we assume that
SNRGoldstone =SNRArecibo√
20(13)
since we are assuming a minimum SNR=10. We understand that the actual usable area of
the Arecibo facility is dependent on the target object’s altitude, and we understand that
there are many other factors that affect a small asteroid’s SNR at both facilities, but we
think that the formulae above provide enough fidelity for this study.
A large fraction of the discovered pop1 objects will be recoverable with the radar
facilities as illustrated in fig. 34, unlike optical spectroscopic followup with IRTF. Indeed,
70-80% of all ATLAS-discovered pop1 objects will be recoverable with Arecibo and
essentially 100% of them will be recoverable from Goldstone. The fraction of PS2

– 31 –
discoveries that are radar-recoverable is not as good but is still in the 50-60% range.
The high-fraction translates into a large annual number of recoverable objects with
perhaps 2-3 ATLAS-discovered objects recoverable per month and about 1 PS2-discovered
object/month.
Mirroring the optical followup, those objects that are detected by PS2 tend to be
visible in longer windows and for longer durations than those detected by ATLAS. However,
the difference is not large and in each case there are about 3 weeks of time after discovery
by either system to schedule radar followup.
It appears that radar recovery and physical characterization of the pop1 objects should
be straightforward.
6. Conclusions
We think that the major utility of this study is the relative performance of the different
surveys because it is clear that there are issues with both the NEO orbit and size-frequency
distribution in the pop1 size range. We needed to employ a large and ad-hoc normalization
to our survey simulations to match the observed PS1 discovery rate that is probably
due to both the inadequate orbit distribution of the small objects and their SFD. The
normalization factor was ∼ 8 but even this value could be an underestimate because of all
the incorporated uncertainties. We would not be surprised if the actual correction factor is
an order of magnitude larger.
The ATLAS system(s) will make a significant contribution to the pop1 discovery effort.
Their all-sky every-night coverage combined with their large pixel scale is well-suited to the
detection of the fast moving pop1 objects. The systems’ modest limiting magnitude (at
least in comparison to the PS2 survey) turns out to be an extra benefit when restricting

– 32 –
the desirable pop1 objects to those that are accessible for spectroscopic followup by IRTF.
Since ATLAS has Vlim = 20.0 any discovered object must be brighter than this limit and
is all the more likely to become brighter than the IRTF’s limiting magnitude during its
apparition.
The PS2 system will also contribute to the pop1 discovery effort and contribute a
sub-set of objects that it can uniquely identify by virtue of its deeper limiting magnitude
if a significant fraction of its time can be devoted to the effort (this study assumed that
it would be a 100% NEO survey). On the other hand, its Vlim = 22.0 allows it to detect
the small pop1 objects when they are far from Earth and on trajectories that make them
less likely to reach an apparent magnitude accessible for IRTF followup. The PS2 camera
has a relatively small pixel scale of ∼ 0.25′′ so the PSF is over-sampled and this makes
trailing losses particularly acute. An aggressive and CPU-intensive software algorithm
could be deployed to identify trails corresponding to pop1 objects to compensate for the
trailing losses. Furthermore, it is likely that PS2 would be more efficient at detecting pop1
objects if it was dedicated specifically to identifying them rather than all NEOs. e.g. the
survey pattern could be targeted towards opposition with more repeat visits to the same
location and/or longer exposure times (though the latter would exacerbate the trailing loss
problem).
Detecting the small and fast moving pop1 objects is a challenging endeavor and
obtaining spectroscopic followup makes the problem all the more difficult. While 20-50% of
the ATLAS-detected pop1 objects come within range of the IRTF facility only 5-20% of the
PS2-detected objects achieve the same (depending on the limiting magnitude configuration
of the survey simulation).
Finally, we would like to take the opportunity of directing the reader’s attention to
the work of Granvik et al. (2012) who claim that there exists a population of asteroids in

– 33 –
temporary geocentric orbits. These objects have very low ∆v and they predict that there
one or two 1 to 2 meter diameter objects in orbit around Earth at any time. Like the
heliocentric pop1 objects, the geocentric ‘minimoons’ would make excellent targets for an
asteroid retrieval mission. The problem with the minimoons is detecting them. But we
believe that dedicated, targeted surveys could be developed to identify the most interesting
largest objects in orbit.

– 34 –
A. Appendix: Comparison to original SOW
This section compares the delivered products to the last statement of work on 2013
Jan 10 titled Jedicke work statement 01102013.
Population 1 The set of NEOs to be output should have absolute magnitudes
in the range 31 <= H <= 27, and orbits with v∞ < 2.6 km/s with respect to
Earth. A simple estimate of the v∞ could be computed from the objects
Tisserand parameter TE with respect to the Earth. In (a, e, i) orbital
element phase space, these objects would likely be bounded by the limits
0.8 < a < 1.3 AU, e < 0.3 and i < 5◦.
COMPLETE The pop1 specification was substantially modified during a series of
emails and telecons with Chodas, Chesley and others. The final pop1 specification
described in §3.1 was delivered on 2013 March 1.
Population 2 The set of NEOs to be output should have absolute magnitudes
in the range 19.5 <= H <= 25, and orbits that allow missions with a total
∆v < 5 km/s. The cutoff limits in (a, e, i) orbital phase space should be
enlarged to 0.6 <= a <= 2 AU, e <= 0.7, i <= 20◦, which are the limits used
by Zimmer & Messerschmid (2011)8.
N/A We were instructed to ignore pop2 as described in §3.5.
0 The main output of the simulations will be a realistic estimate of the expected
discovery rates of these target bodies as a function of size bins.
8We were unable to locate this reference.

– 35 –
COMPLETE The discovery rates for all systems are discussed in §5.3 and §5.5.
A The NEOSSat-1.0 NEO population model (Greenstreet and Gladman 2012)
should be used, since it has finer resolution in (a, e, i) Population space
than the old Bottke et al. (2002) model.
COMPLETE We have used the Greenstreet and Gladman (2012) as described
in §3 but implemented an improvement to remove residual binning as described in §3.2.
B The discovery simulations should be run for an all-sky ATLAS survey and a
deeper NEO-dedicated Pan-STARRS-2 ecliptic survey.
COMPLETE We have implemented both as described in §4.
C The statistics of the length of time between discovery and the closing of the
radar, photometry and spectrophotometry windows should be examined.
COMPLETE We provide an analysis of the IRTF and radar followup windows in
§5.9 and §5.10 respectively.
D The ATLAS and Pan-STARRS limiting magnitude assumptions should be
varied to surround the expected limiting magnitude. For example, the
ATLAS limiting magnitudes should include values of 19.5, 20.0, and 20.5.
COMPLETE We have implemented nominal and nominal±0.5 mag limiting magni-
tudes for each of the ATLAS-North, ATLAS-South and PS2 systems as described in §4.

– 36 –
E The benefit of a second ATLAS system — possibly in southern hemisphere
— should be examined.
COMPLETE We have performed all our simulations for a southern hemisphere
ATLAS system as described in §4.2.
F The simulation should be for at least one month for both surveys (the same
month) but it is desirable to simulate at least one year and preferably two
years of operations.
COMPLETE We have performed all our simulations for two years for all three
surveys as described in §4.
G The simulation should make the best effort at incorporating the effects of
weather on the survey strategy.
COMPLETE We have incorporated a full weather stream into our models that also
incorporates system downtime as described in §4
H The final report should provide synthetic results for the observability of at
least 1,000 NEOs in the desired range of absolute magnitudes.
COMPLETE The nominal+0.5 simulations provide results for 1,225 pop1 objects.
The nominal simulations yielded 625 pop1 objects. The nominal-0.5 simulations
yielded 279 objects.
I The discovery rate should be estimated separately in bins 0.5 absolute
magnitudes width.
– 37 –
COMPLETE The discovery rate was measured separately in bins 0.5 absolute
magnitudes width as described in §5.3 and §5.5.
J Discovery rate statistics should be plotted against v∞ bins in order to assess
whether the lower v∞ objects are more likely to be discovered than the
higher v∞ objects.
COMPLETE Discussions with the JPL NEO office after the creation of the State-
ment of Work (SoW) suggested that v∞ was not a useful measure for this study. The
SoW was not re-written so we have interpreted this requirement in terms of ∆v which
we believe to be a more useful independent parameter. The analysis is described in §5.8.
K The output of each simulation should be a file of data for each simulated
object that gets discovered. The file should include orbital elements,
discovery circumstances and observability circumstances for the relevant
discovery follow-up.
COMPLETE The tabular results are available at
http://www.ifa.hawaii.edu/users/jedicke/data/ARM analysis results.zip.
The delivered package is described in §C.
B. Delivery Schedule
The agreed delivery schedule and actual delivery date are provided in table 2. The
only report that was delivered late is this final report. We were told that delivery by the
morning of 2013 April 24 would be acceptable. A trivial update of the final report was

– 38 –
provided the next day — 2013 April 25.
C. Delivered Package
All the results of this study are available at
http://www.ifa.hawaii.edu/users/jedicke/data/ARM analysis results.zip.
The zip file contains the following directories:
OUTPUT-TABLES
Figures-Atlas-North-V19.5
Figures-Atlas-North-V20.0
Figures-Atlas-North-V20.5
Figures-Atlas-South-V19.5
Figures-Atlas-South-V20.0
Figures-Atlas-South-V20.5
Figures-PS2-21.5
Figures-PS2-V22.0
Figures-PS2-V22.5
Jedicke-Schunova-ATLAS-PS2-ARM-study-2013-04-25.pdf
Jedicke-Schunova-ATLAS-PS2-ARM-study-2013-04-24.xlsx
generate-greenstreet-neos-v2.1.py
The top level directory contains this report, an excel spreadsheet
(Jedicke-Schunova-ATLAS-PS2-ARM-study-2013-04-25.xlsx)
containing most of the data and many of the figures in this report, and the python code
(generate-greenstreet-neos-v2.1.py) required to generate the smoothed pop1 NEOs
from the Greenstreet and Gladman (2012) NEO model. The python code usage can be
found by executing the command python generate-greenstreet-neos-v2.1.py -h.

– 39 –
The Figures* directories include figures showing the observability circumstances for
all the synthetic pop1 objects discovered with each survey simulation from the perspective
of followup with IRTF, Arecibo and Goldstone. We think the nomenclature for the 9 survey
simulation sub-directories is self-explanatory.
The OUTPUT-TABLES directory contains the following survey-simulation sub-directories:
ATLAS N 19.5 SMOOTH POP1/
ATLAS N 20.0 SMOOTH POP1/
ATLAS N 20.5 SMOOTH POP1/
ATLAS N+S/
ATLAS S 19.5 SMOOTH POP1/
ATLAS S 20.0 SMOOTH POP1/
ATLAS S 20.5 SMOOTH POP1/
PS2 21.5 SMOOTH POP1/
PS2 22.0 SMOOTH POP1/
PS2 22.5 SMOOTH POP1/
Each survey simulation directory contains 3 files. For instance, the
ATLAS N 19.5 SMOOTH POP1 directory contains:
POP1.ATLAS.195 complete table.dat
README.txt
pop1.atlas.195 complete table.dat.paw
The *.dat file is the output table for objects discovered in the simulation corresponding
to the current directory. The *.paw can be ignored. It is essentially the *.dat file with
all non-numeric characters removed. It could be useful for software that is not capable of
handling non-numeric values.

– 40 –
The README.txt file provides a short description of the current simulation and the
meaning of the 22 columns in the *.dat file. The columns are:
1. Name of object
2. Discovery date [MJD]
3. V at discovery [mag]
4. Topocentric Opposition-centered longitude at discovery [deg]
5. Topocentric Opposition-centered lattitude at discovery[deg]
6. Orbit epoch [MJD]
7. Semi-major axis [AU]
8. Eccentricity
9. Inclination [deg]
10. Argument of perihelion [deg]
11. Longitude of Ascending node [deg]
12. Main anomaly [deg]
13. Absolute magnitude [mag]
14. IRTF window - Beginning [MJD]
15. IRTF window - End [MJD]
16. IRTF window - Length [days]
17. Arecibo window - Beginning [MJD]
18. Arecibo window - End [MJD]
19. Arecibo window - Length [days]
20. Goldstone window - Beginning [MJD]
21. Goldstone window - End [MJD]
22. Goldstone window - Length [days]

– 41 –
Acknowledgments
We thank Richard Wainscoat, co-lead on the PS1 Inner Solar System Key Project, and
John Tonry, the ATLAS PI, both from the University of Hawaii’s Institute for Astronomy,
for their insights into operations envisioned for PS2 and ATLAS respectively. We thank
Scott Stuart, MIT Lincoln Laboratory, for helpful discussions on the pop1 size-frequency
distribution.

– 42 –
REFERENCES
Bottke, W. F., A. Morbidelli, R. Jedicke, J.-M. Petit, H. F. Levison, P. Michel, and
T. S. Metcalfe 2002. Debiased Orbital and Absolute Magnitude Distribution of the
Near-Earth Objects. Icarus 156, 399–433.
Bottke, W. F., Jr., A. Cellino, P. Paolicchi, and R. P. Binzel 2002. Asteroids III. Asteroids
III .
Brown, P., R. E. Spalding, D. O. ReVelle, E. Tagliaferri, and S. P. Worden 2002. The flux
of small near-Earth objects colliding with the Earth. Nature 420, 294–296.
Chambers, K. C. 2007. The PS1 System and Science Mission. In American Astronomical
Society Meeting Abstracts, Volume 39 of Bulletin of the American Astronomical
Society, pp. #142.06.
Chambers, K. C. 2012. Pan-STARRS1 Science Mission, Status and Results. In American
Astronomical Society Meeting Abstracts #220, Volume 220 of American Astronomical
Society Meeting Abstracts, pp. #107.04.
Denneau, L., R. Jedicke, T. Grav, M. Granvik, J. Kubica, A. Milani, P. Veres, R. Wainscoat,
D. Chang, F. Pierfederici, N. Kaiser, K. C. Chambers, J. N. Heasley, E. A. Magnier,
P. A. Price, J. Myers, J. Kleyna, H. Hsieh, D. Farnocchia, C. Waters, W. H.
Sweeney, D. Green, B. Bolin, W. S. Burgett, J. S. Morgan, J. L. Tonry, K. W.
Hodapp, S. Chastel, S. Chesley, A. Fitzsimmons, M. Holman, T. Spahr, D. Tholen,
G. V. Williams, S. Abe, J. D. Armstrong, T. H. Bressi, R. Holmes, T. Lister,
R. S. McMillan, M. Micheli, E. V. Ryan, W. H. Ryan, and J. V. Scotti 2013. The
Pan-STARRS Moving Object Processing System. ArXiv e-prints .
Granvik, M., J. Vaubaillon, and R. Jedicke 2012. The population of natural Earth satellites.
Icarus 218, 262–277.

– 43 –
Greenstreet, S., and B. Gladman 2012. High-inclination Atens ARE Rare. In AAS/Division
for Planetary Sciences Meeting Abstracts, Volume 44 of AAS/Division for Planetary
Sciences Meeting Abstracts, pp. 305.05.
Jedicke, R., A. Morbidelli, T. Spahr, J. M. Petit, and W. F. Bottke 2003. Earth and
space-based NEO survey simulations: prospects for achieving the spaceguard goal.
Icarus 161, 17–33.
Mainzer, A., T. Grav, J. Bauer, J. Masiero, R. S. McMillan, R. M. Cutri, R. Walker,
E. Wright, P. Eisenhardt, D. J. Tholen, T. Spahr, R. Jedicke, L. Denneau,
E. DeBaun, D. Elsbury, T. Gautier, S. Gomillion, E. Hand, W. Mo, J. Watkins,
A. Wilkins, G. L. Bryngelson, A. Del Pino Molina, S. Desai, M. Gomez Camus, S. L.
Hidalgo, I. Konstantopoulos, J. A. Larsen, C. Maleszewski, M. A. Malkan, J.-C.
Mauduit, B. L. Mullan, E. W. Olszewski, J. Pforr, A. Saro, J. V. Scotti, and L. H.
Wasserman 2011. NEOWISE Observations of Near-Earth Objects: Preliminary
Results. ApJ 743, 156.
Morgan, J. S., N. Kaiser, V. Moreau, D. Anderson, and W. Burgett 2012. Design differences
between the Pan-STARRS PS1 and PS2 telescopes. In Society of Photo-Optical
Instrumentation Engineers (SPIE) Conference Series, Volume 8444 of Society of
Photo-Optical Instrumentation Engineers (SPIE) Conference Series.
Shoemaker, E. M., and E. F. Helin 1978. Earth-approaching asteroids as targets for
exploration. In D. Morrison and W. C. Wells (Eds.), NASA Conference Publication,
Volume 2053 of NASA Conference Publication, pp. 245–256.
Stuart, J. S. 2001. A Near-Earth Asteroid Population Estimate from the LINEAR Survey.
Science 294, 1691–1693.
Tonry, J. L. 2011. An Early Warning System for Asteroid Impact. PASP 123, 58–73.

– 44 –
Tonry, J. L., C. W. Stubbs, K. R. Lykke, P. Doherty, I. S. Shivvers, W. S. Burgett, K. C.
Chambers, K. W. Hodapp, N. Kaiser, R.-P. Kudritzki, E. A. Magnier, J. S. Morgan,
P. A. Price, and R. J. Wainscoat 2012. The Pan-STARRS1 Photometric System.
ApJ 750, 99.
This manuscript was prepared with the AAS LATEX macros v5.2.
– 45 –
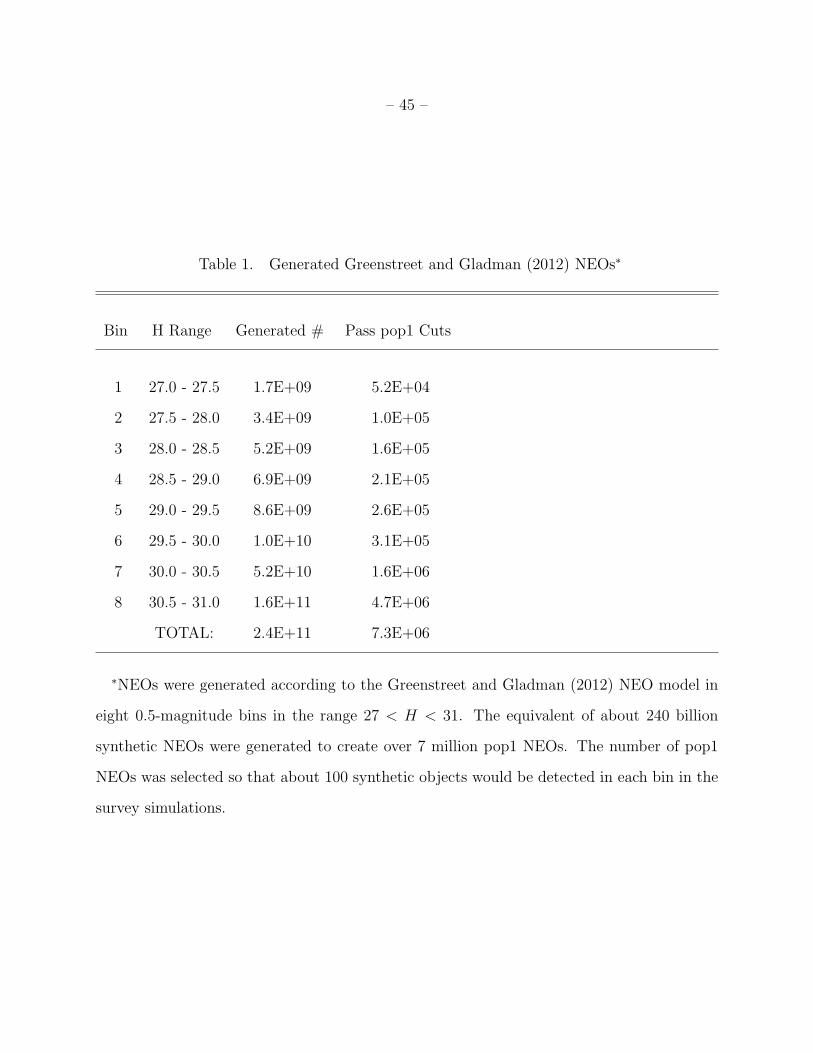
Table 1. Generated Greenstreet and Gladman (2012) NEOs∗
Bin H Range Generated # Pass pop1 Cuts
1 27.0 - 27.5 1.7E+09 5.2E+04
2 27.5 - 28.0 3.4E+09 1.0E+05
3 28.0 - 28.5 5.2E+09 1.6E+05
4 28.5 - 29.0 6.9E+09 2.1E+05
5 29.0 - 29.5 8.6E+09 2.6E+05
6 29.5 - 30.0 1.0E+10 3.1E+05
7 30.0 - 30.5 5.2E+10 1.6E+06
8 30.5 - 31.0 1.6E+11 4.7E+06
TOTAL: 2.4E+11 7.3E+06
∗NEOs were generated according to the Greenstreet and Gladman (2012) NEO model in
eight 0.5-magnitude bins in the range 27 < H < 31. The equivalent of about 240 billion
synthetic NEOs were generated to create over 7 million pop1 NEOs. The number of pop1
NEOs was selected so that about 100 synthetic objects would be detected in each bin in the
survey simulations.
– 46 –
Table 2. Delivery Schedule
Report Item Format Expected Date Delivery Date On Schedule
1 Status Update e-mail 22 Jan 2013 22 Jan 2013 Yes
2 Status Update e-mail 6 Feb 2013 6 Feb 2013 Yes
3 Prelim Report ppt 26 Feb 2013 25 Feb 2013 Yes
4 Prelim Report ppt 12 Mar 2013 12 Mar 2013 Yes
5 Prelim Report ppt 26 Mar 2013 26 Mar 2013 Yes
6 Final Report written 5 Apr 2013 24 Apr 2013 No
– 47 –
Fig. 1.— Process flow through our simulation system.

– 48 –
Fig. 2.— Semi-major axis, eccentricity and inclination distributions from the Greenstreet
and Gladman (2012) and Bottke et al. (2002) NEO models.

– 49 –
Fig. 3.— Eccentricity vs. semi-major axis distribution for 190, 499 NEOs generated from
the Greenstreet and Gladman (2012) model. The binning in the model is evident along the
right edge of the distribution where p = a(1 − e) = 1.3 AU. The five red dots are the only
mission accessible targets according to the 5 criteria provided in §3.
– 50 –
Fig. 4.— Eccentricity vs. semi-major axis, inclination vs. semi-major axis, and perihelion vs.
aphelion distance for a sample of pop1 objects selected from the Greenstreet and Gladman
(2012) model. Note that there is evidence of the binning in the model.
– 51 –
Fig. 5.— Semi-major axis, eccentricity and inclination distributions from the Greenstreet
and Gladman (2012) model in the range of pop1 objects. The semi-major axis distribution
is fit to a quartic function, eccentricity to a Gaussian, and the inclination to a linear function
(see §3.2).

– 52 –
Fig. 6.— Semi-major axis, eccentricity and inclination distributions from the smooth-pop1
sample for comparison with fig. 4. Note that there are no bin edge effects within the sample.

– 53 –
Fig. 7.— Fractional distribution of ∆v for the pop1-smooth sample (left) and NEOs from
the entire Greenstreet and Gladman (2012) model. ∆v was calculated using the algorithm
of Shoemaker and Helin (1978).

– 54 –
Fig. 8.— (courtesy of Scott Stuart, MIT Lincoln Laboratory) Cumulative absolute magni-
tude distribution according to several NEO models. See §3.3 for a detailed discussion.

– 55 –
Fig. 9.— Normalized fraction of objects in each H bin in the pop1 NEO sample showing
that within each H bin the objects are distributed according to the Brown et al. (2002) NEO
size-frequency distribution (∝ 100.54(H−24)) appropriate for objects with H > 18. i.e. within
a bin the ratio of the number of objects on the right and left sides of the 0.5 mag wide bin is
1.86 ∼ 100.54×0.5 and the total number of objects increases dramatically as H increases from
left to right.

– 56 –
Fig. 10.— ATLAS-North survey pattern on 4 nights. Each red square represents a single
boresite that is imaged 4 times with roughly a TTI between each image. The squares each
represent the central portion of the 40 deg2 image so that the sky between each red square is
fully imaged. The red line represents the ecliptic while the blue line represents the galactic
equator. The positions of the Sun, Moon and planets are represented by little images of
each near the ecliptic. The top 2 images are for the winter nights of 22 and 6 January 2015
respectively. The bottom 2 images are for the summer nights of 19 and 3 June respectively.
The left images are at new moon and the images on the right are at full moon. Note that
long winter nights allow the opportunity to cover most of the sky but on shorter summer
nights the survey coverage does not go as far north with the more southerly ecliptic.

– 57 –
Fig. 11.— (top left) Apparent V magnitude vs. rate of motion (ω) for asteroids detected with
the PS1 telescope. i.e. real asteroids detected by the actual PS1 system. Main belt asteroids
dominate the number statistics for ω . 0.5◦/day. The red line represents the empirical
trailing loss limit above which asteroids are too faint to be reliably detected. Trailing losses
begin at about 0.5◦/day. ALL THE REMAINING FIGURES CORRESPOND TO THE
SIMULATED NOMINAL+0.5 LIMITING MAGNITUDE SYSTEMS (top right). Apparent
V magnitude vs. rate of motion for synthetic pop1 NEOs detected by PS2 in this study.
(bottom left) Apparent V magnitude vs. rate of motion for synthetic pop1 NEOs detected
by ATLAS-North in this study. (bottom right) Apparent V magnitude vs. rate of motion
for synthetic pop1 NEOs detected by ATLAS-South in this study.

– 58 –
Fig. 12.— (top left) Rates of motion for asteroids detected with the actual PS1 telescope.
Note the logarithmic number scale. The spike at small rates is due to main belt asteroids
that dominate the number statistics. The NEOs extend to the highest rates of motion
though PS1 has not yet reported a NEO with a rate > 5◦/day (see footnote 4). ALL
THE REMAINING FIGURES CORRESPOND TO THE SIMULATED NOMINAL+0.5
LIMITING MAGNITUDE SYSTEMS INCLUDING THE EFFECTS OF WEATHER, FILL
FACTOR, AND TRAILING. (top right) Rates of motion for synthetic pop1 NEOs detected
by PS2 in this study. (bottom left) Rates of motion for synthetic pop1 NEOs detected
by ATLAS-North in this study. (bottom right) Rates of motion for synthetic pop1 NEOs
detected by ATLAS-South in this study. The distribution for ATLAS-South is essentially
identical to that for ATLAS-North as expected.

– 59 –
Fig. 13.— PS1 observing metric as a function of time (top) and a histogram of the average
observing metric in half-night intervals (bottom). The metric can be roughly interpreted as:
1.0 — photometric, 0.5 — acceptable, 0.0 — no observing.

– 60 –
Fig. 14.— Cumulative fractional observing metric in half-night intervals. More than 53% of
half-nights have an average observing metric of ≥ 0.07.

– 61 –
Fig. 15.— Survey pattern for the full moon night of 2015 Jan 6 for the ATLAS-South
survey. The figure is identical to the upper right panel in fig. 10 except for the survey being
performed from Cerro Tololo in Chile (observatory code 807). The southerly location of the
ATLAS-S site means that the Moon, located well above the equator, is not such a problem
for the ATLAS-South site on this night. More of the fields are close to the equator and the
survey is truncated close to the south celestial pole.

– 62 –
Fig. 16.— (top) PS2 survey pattern for an entire lunation. PS2 will image each boresite
4×/night and 2×/lunation. The entire visible night sky is imaged in the absence of losses
due to weather. (bottom) PS2 survey pattern for the full moon night of 6 January 2015 —
the same night as the upper right panel in fig. 10. The blue fields are imaged in the zP1
band due to their proximity to the moon while the white fields are imaged in wP1. The
‘patchiness’ compared to fig. 10 is due to PS2’s smaller FOV and the attempt to image the
entire sky each lunation.

– 63 –
Fig. 17.— The fraction of pop1 objects that become bright enough to be detectable by
ATLAS and PS2 based only on the objects’ MOID and absolute magnitude. i.e. about 40%
of pop1 objects with H ∼ 30.25 are detectable by the PS2+0.5 system.

– 64 –
Fig. 18.— Annual pop1 detection efficiency as a function of absolute magnitude for the
nominal (top) and nominal∓0.5 mag ATLAS-North, ATLAS-South and PS2 survey systems.

– 65 –
Fig. 19.— Raw number of synthetic pop1 discoveries in a 2 year simulation for the nomi-
nal+0.5 versions of the ATLAS-North, ATLAS-South and PS2 survey systems. Each column
represents the number of discoveries at the specified step in the pipeline. ‘Detected’ refers to
raw detections from the simulation — the object appeared in a field of view and was brighter
than the limiting magnitude. ‘w/ weather & system’ is the number of discoveries after ac-
counting for weather and system downtime. ‘w/ tracklet efficiency’ accounts for losses due
to tracklet detection efficiency. ‘w/trailing loss’ accounts for trailing losses due to the motion
of the object during an exposure.
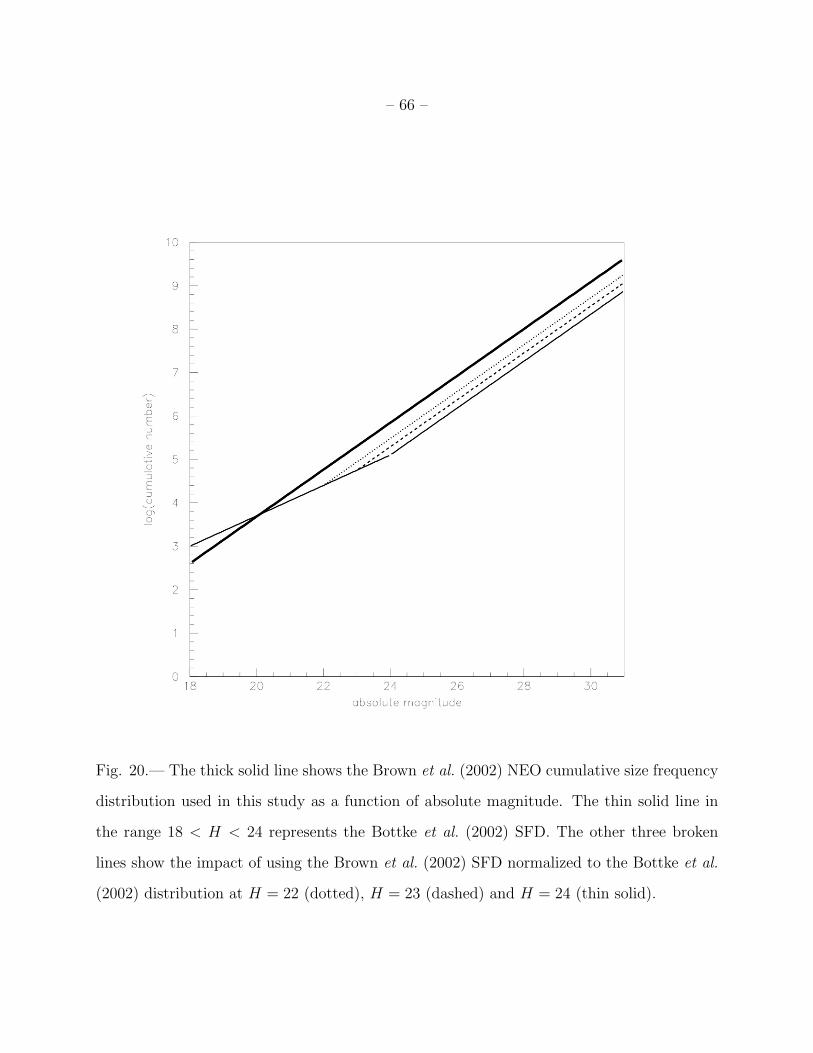
– 66 –
Fig. 20.— The thick solid line shows the Brown et al. (2002) NEO cumulative size frequency
distribution used in this study as a function of absolute magnitude. The thin solid line in
the range 18 < H < 24 represents the Bottke et al. (2002) SFD. The other three broken
lines show the impact of using the Brown et al. (2002) SFD normalized to the Bottke et al.
(2002) distribution at H = 22 (dotted), H = 23 (dashed) and H = 24 (thin solid).
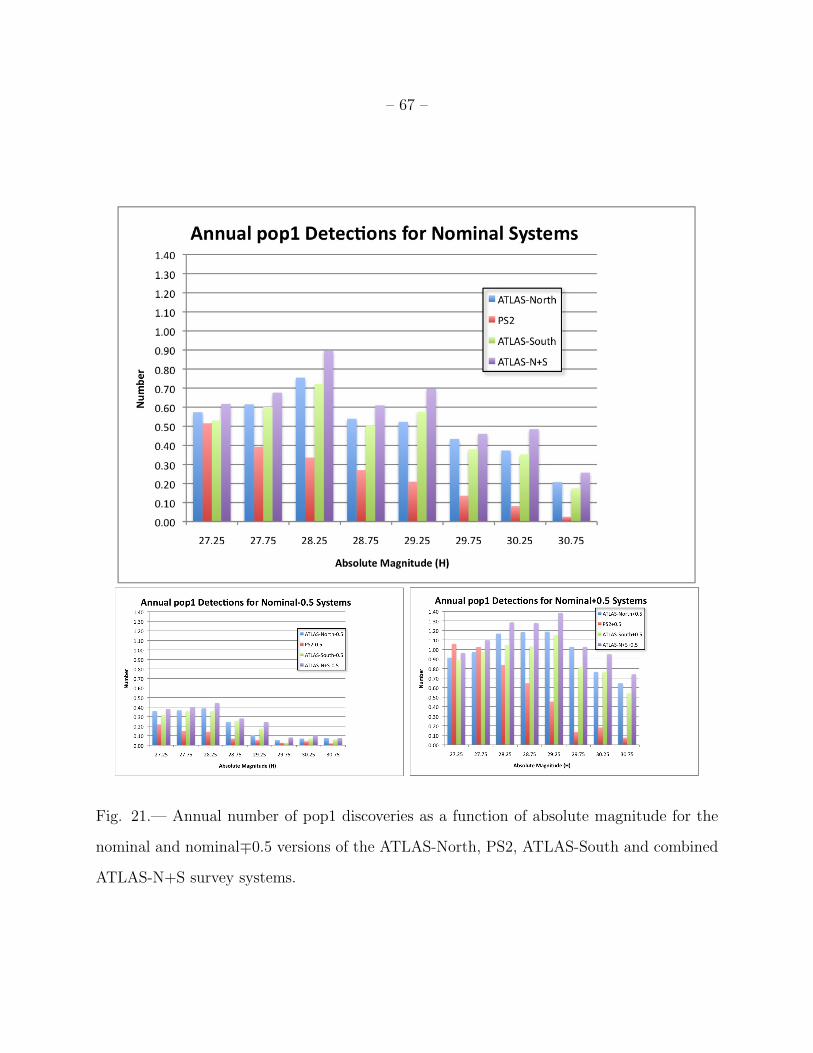
– 67 –
Fig. 21.— Annual number of pop1 discoveries as a function of absolute magnitude for the
nominal and nominal∓0.5 versions of the ATLAS-North, PS2, ATLAS-South and combined
ATLAS-N+S survey systems.

– 68 –
Fig. 22.— Annual number of pop1 discoveries for the nominal and nominal±0.5 versions of
the ATLAS-North, PS2, ATLAS-South and combined ATLAS-N+S survey systems

– 69 –
Fig. 23.— Normalized annual number of pop1 discoveries for the nominal and nominal±0.5
versions of the ATLAS-North, PS2, ATLAS-South and combined ATLAS-N+S survey sys-
tems. The PS2-0.5 system now discovers 6 objects to be consistent with the estimated
annualized 6 pop1 objects discovered by the PS1 system. NOTE: the scale on this figure is
4× the scale on fig. 22.

– 70 –
Fig. 24.— Normalized annual number of pop1 discoveries as a function of absolute magnitude
for the nominal and nominal±0.5 versions of the ATLAS-North, PS2, ATLAS-South and
combined ATLAS-N+S survey systems.

– 71 –
Fig. 25.— All these figures illustrate the fraction of detected pop1 objects that are unique
to a particular survey or identified by 2 of the surveys assuming that all the surveys were
operating at the same time. i.e. the top (nominal) pie chart assumes that the nominal
ATLAS-North, ATLAS-South and PS2 systems are all operational at the same time and in
this circumstance about 22% of all detected objects are uniquely detected by PS2. The 3
different pie charts represent the results for the nominal and nominal∓0.5 configurations.
About 11% of all objects are detected by all 3 surveys regardless of the configuration with
respect to nominal.

– 72 –
Fig. 26.— Normalized relative efficiency for detecting pop1 objects with the PS2+0.5 system
as a function of ∆v (Shoemaker and Helin 1978). i.e. this is not the absolute efficiency relative
to the pop1 objects.
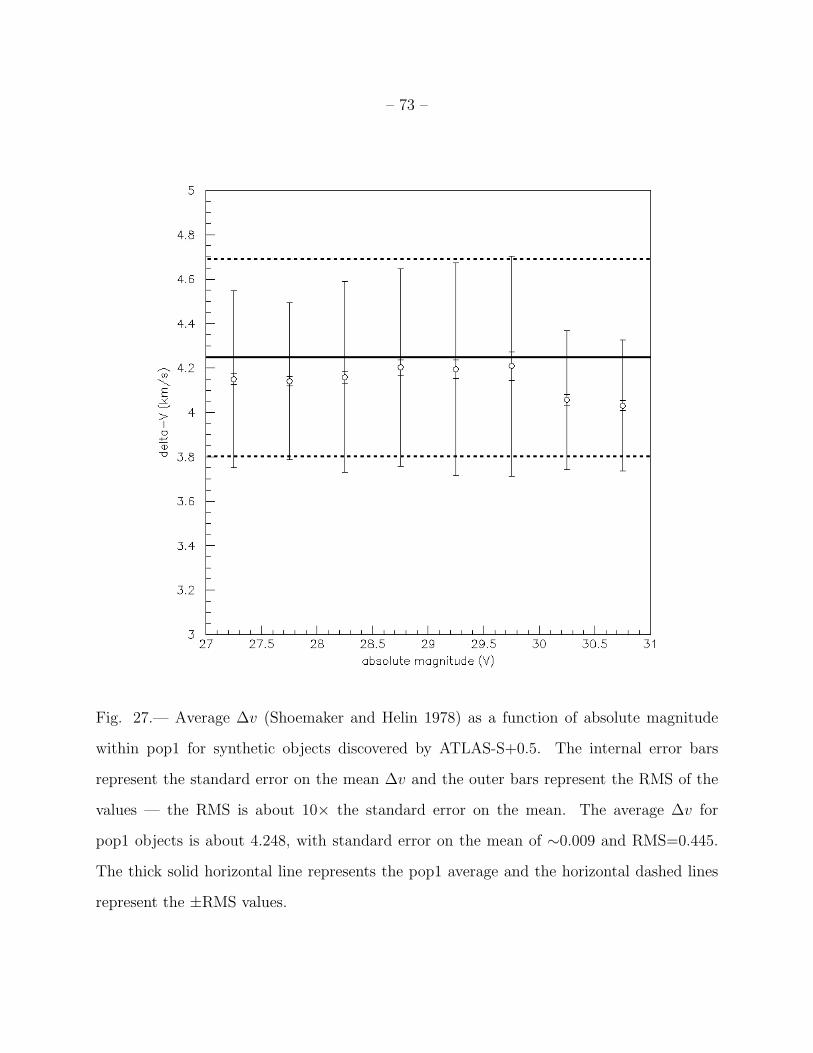
– 73 –
Fig. 27.— Average ∆v (Shoemaker and Helin 1978) as a function of absolute magnitude
within pop1 for synthetic objects discovered by ATLAS-S+0.5. The internal error bars
represent the standard error on the mean ∆v and the outer bars represent the RMS of the
values — the RMS is about 10× the standard error on the mean. The average ∆v for
pop1 objects is about 4.248, with standard error on the mean of ∼0.009 and RMS=0.445.
The thick solid horizontal line represents the pop1 average and the horizontal dashed lines
represent the ±RMS values.

– 74 –
Fig. 28.— The black dots (some times dense enough that they appear to be a line) in
each panel represent the properties of an individual NEO for 100 days after discovery by
the nominal ATLAS-North system. The red lines represent the detection threshold for that
property with the IRTF for spectroscopic followup and the gray regions represent when an
object is unobservable with IRTF. This object is observable with the IRTF for only 3 days
beginning a few days after discovery by the nominal ATLAS system. The red star and
triangles in the Dec. vs. R.A. and topocentric ecliptic latitude vs. topocentric ecliptic
longitude figures represent the location of the object on the day of discovery and on the
100th day after discovery respectively.

– 75 –
Fig. 29.— (left) The fraction of detected targets accessible for followup by IRTF by each of
the 3 surveys as a function of the offset from the nominal limiting magnitude. (right) The
annual number of detected targets accessible for followup by IRTF by each of the 3 surveys
as a function of the offset from the nominal limiting magnitude. To ease comparison with
the radar followup capability the number scale is identical to that in fig. 35.

– 76 –
Fig. 30.— (left) Average length in days of the followup window with IRTF for those followup
windows that are not zero by each of the 3 surveys as a function of the offset from the nominal
limiting magnitude. (right) Average time in days between discovery and the closing of the
followup window with IRTF for those followup windows that are not zero by each of the 3
surveys as a function of the offset from the nominal limiting magnitude.

– 77 –
Fig. 31.— (reproduced from http://echo.jpl.nasa.gov/ lance/snr/far asnr18.gif)
The SNR delivered by the Arecibo radar as a function of absolute magnitude for S-class
asteroids.

– 78 –
Fig. 32.— The black lines in each panel represent the properties of an individual NEO
for 100 days after discovery by the nominal ATLAS-North system (the same object as in
fig. 28). The red lines and gray regions represent when that property renders the object
undetectable at Arecibo for radar followup. This object is observable with Arecibo for 4 days
beginning about 10 days after discovery. The red star and triangles in the Dec. vs. R.A. and
topocentric ecliptic latitude vs. topocentric ecliptic longitude figures represent the location
of the object on the 1st and 100th day after discovery respectively.

– 79 –
Fig. 33.— The black lines in each panel represent the properties of an individual NEO
for 100 days after discovery by the nominal ATLAS-North system (the same object as in
fig. 28). The red lines and gray regions represent when that property renders the object
undetectable at Goldstone for radar followup. This object is observable with Goldstone for
17 days beginning about 10 days after discovery. The red star and triangles in the Dec. vs.
R.A. and topocentric ecliptic latitude vs. topocentric ecliptic longitude figures represent the
location of the object on the 1st and 100th day after discovery respectively.

– 80 –
Fig. 34.— (left) The fraction of targets accessible for followup by (top) Arecibo and (bottom)
Goldstone detected by each of the 3 surveys as a function of the offset from the nominal
limiting magnitude. (right) The annual number of detected targets accessible for followup
by (top) Arecibo and (bottom) Goldstone detected by each of the 3 surveys as a function of
the offset from the nominal limiting magnitude. To ease comparison with the radar followup
capability the number scale is identical to that in fig. 35.

– 81 –
Fig. 35.— (left) Average width in days of the followup window with (top) Arecibo and
(bottom) Goldstone for those followup windows that are not zero by each of the 3 surveys as
a function of the offset from the nominal limiting magnitude. (right) Average time in days
between discovery and the closing of the followup window with (top) Arecibo and (bottom)
Goldstone for those followup windows that are not zero by each of the 3 surveys as a function
of the offset from the nominal limiting magnitude.