automated software synthesis for complex robotic … saha.pdf · · 2016-03-22automated software...
TRANSCRIPT

Automated Software Synthesis forComplex Robotic Systems
Indranil Saha
Department of Computer Science and EngineeringIndian Institute of Technology Kanpur
Indranil Saha Automated Software Synthesis for Robotic Systems 1/48

Complex Robotic Systems
Indranil Saha Automated Software Synthesis for Robotic Systems 2/48

Complex Robotic Systems
The systems are mostlylife-critical or mission-critical
Indranil Saha Automated Software Synthesis for Robotic Systems 2/48

Embedded Control Software: The Weak LinkPlant
x' = f(x, u)
Controlleru = k(x)
xu
Actuator Sensor
Control System
Plant
Controller
Indranil Saha Automated Software Synthesis for Robotic Systems 3/48

Embedded Control Software: The Weak LinkPlant
x' = f(x, u)
Controlleru = k(x)
xu
Actuator Sensor
Control System
Plant
Controller
1962 – Mariner I Space Probe Malfunction
Indranil Saha Automated Software Synthesis for Robotic Systems 3/48

Embedded Control Software: The Weak LinkPlant
x' = f(x, u)
Controlleru = k(x)
xu
Actuator Sensor
Control System
Plant
Controller
1962 – Mariner I Space Probe Malfunction
1991 – The Patriot Missile Failure
Indranil Saha Automated Software Synthesis for Robotic Systems 3/48

Embedded Control Software: The Weak LinkPlant
x' = f(x, u)
Controlleru = k(x)
xu
Actuator Sensor
Control System
Plant
Controller
1962 – Mariner I Space Probe Malfunction
1991 – The Patriot Missile Failure
1995 – Ariane 5 Flight 501 Explosion
Indranil Saha Automated Software Synthesis for Robotic Systems 3/48

Embedded Control Software: The Weak LinkPlant
x' = f(x, u)
Controlleru = k(x)
xu
Actuator Sensor
Control System
Plant
Controller
1962 – Mariner I Space Probe Malfunction
1991 – The Patriot Missile Failure
1995 – Ariane 5 Flight 501 Explosion
2014 – Toyota Prius Recall
Indranil Saha Automated Software Synthesis for Robotic Systems 3/48

Embedded Control Software: The Weak Link
Today in aerospace industry, control software design, implementation, andtesting account for over 60% of the total development cost of an aircraft(Source: Lockheed Martin Aeronautics Company)
Plantx' = f(x, u)
Controlleru = k(x)
xu
Actuator Sensor
Control System
Plant
Controller
1962 – Mariner I Space Probe Malfunction
1991 – The Patriot Missile Failure
1995 – Ariane 5 Flight 501 Explosion
2014 – Toyota Prius Recall
....
Indranil Saha Automated Software Synthesis for Robotic Systems 3/48

Future Robotic SystemsAerospace
Automatic air-traffic controllerAutomotive
Self driving carDelivery
Delivery by UAVsHealthCare
Surgery by robot armsAgriculture
Automatic crop and fruit harvestatingEntertainment
Robot soccer, robot music band
Indranil Saha Automated Software Synthesis for Robotic Systems 4/48

Future Robotic SystemsAerospace
Automatic air-traffic controllerAutomotive
Self driving carDelivery
Delivery by UAVsHealthCare
Surgery by robot armsAgriculture
Automatic crop and fruit harvestatingEntertainment
Robot soccer, robot music band
More Automation.. More reliance on Software..
Indranil Saha Automated Software Synthesis for Robotic Systems 4/48

Future Robotic SystemsAerospace
Automatic air-traffic controllerAutomotive
Self driving carDelivery
Delivery by UAVsHealthCare
Surgery by robot armsAgriculture
Automatic crop and fruit harvestatingEntertainment
Robot soccer, robot music band
More Automation.. More reliance on Software..
Need of the hour: More Automation in Software Development
Indranil Saha Automated Software Synthesis for Robotic Systems 4/48

Research Goal
Research GoalTo devise tools and technologies to build high-assurancesoftware for complex robotic systems
FocusAutomated Software Synthesis
Indranil Saha Automated Software Synthesis for Robotic Systems 5/48

Example: Multi-Robot Motion Planning
I2
I1 I4
I3
F1
F2 F3
F4
x
y
Goal: I1→ F1, I2→ F2,I3→ F3, I4→ F4
Requirements:Maintain a rectangular formation
Maintain a precedence relationshipMaintain a minimum distance
Indranil Saha Automated Software Synthesis for Robotic Systems 6/48

Planning, Control and Computing Hierarchy
High-Level Planning
Control Algorithm
Design
Real-Time Software
Implementation
Artificial IntelligenceFormal Methods
Control Theory
Scheduling TheorySoftware Engineering
Compositional motionplanning for dynamicrobots
Synthesis of EmbeddedControl Software
Indranil Saha Automated Software Synthesis for Robotic Systems 7/48

Planning, Control and Computing Hierarchy
High-Level Planning
Control Algorithm
Design
Real-Time Software
Implementation
Artificial IntelligenceFormal Methods
Control Theory
Scheduling TheorySoftware Engineering
Compositional motionplanning for dynamicrobots
Synthesis of EmbeddedControl Software
Research Focus
Automated Synthesiswith the aid of
Formal Methods + Control Theory + Scheduling Theory + Software Engineering
Indranil Saha Automated Software Synthesis for Robotic Systems 7/48

Outline
Background on Synthesis
Compositional Motion Planning
Control Software Synthesis
Ongoing and Future Work
Indranil Saha Automated Software Synthesis for Robotic Systems 8/48

Outline
Background on Synthesis
Compositional Motion Planning
Control Software Synthesis
Ongoing and Future Work
Indranil Saha Automated Software Synthesis for Robotic Systems 9/48

Program Synthesis
Specification
SystemInformation
Program
SynthesisTool
(SMT Solver)
Indranil Saha Automated Software Synthesis for Robotic Systems 10/48

Program Synthesis
Specification
SystemInformation
Program
SynthesisTool
(SMT Solver)
Synthesized program is correct-by-construction
Indranil Saha Automated Software Synthesis for Robotic Systems 10/48

Program Synthesis - Specification
Specification
SystemInformation
Program
SynthesisTool
(SMT Solver)
Indranil Saha Automated Software Synthesis for Robotic Systems 11/48

Specification Language
R1
R3 R4
R2
3/2/15
Temporal logics as a task language
π1
π3 π4
π2
Should be expressive to capture temporal relationships amongthe events
Example: Visit area R2, then area R3, then area R4, and finally,return and remain in region R1 while avoiding areas R2 and R3
Linear Temporal Logic
Indranil Saha Automated Software Synthesis for Robotic Systems 12/48

Linear Temporal Logic (LTL)LTL Grammar:
φ ::= π | ¬φ | φ ∧ φ | © φ | � φ | ♦ φ | φ U φ
π - atomic proposition
Example: π1 - The robot is in Room 1
3/2/15
Go to goal (reachability)
Coverage
Sequencingπ1
π3 π4
π2
Reachability with avoidance
Recurrent Sequencing
“Visit area π2 then area π3 then area π4 and, finally, return and remain in region π1 while avoiding areas π2 and π3”
Temporal logics as a task language
(next)©φ φ
(always)�φ φ φ φ φ
(eventually)♦φ φ
(until)φ1 U φ2 φ1 φ1 φ2
Indranil Saha Automated Software Synthesis for Robotic Systems 13/48

Examples of LTL Specifications
3/2/15
Go to goal (reachability)
Coverage
Sequencingπ1
π3 π4
π2
Reachability with avoidance
Recurrent Sequencing
“Visit area π2 then area π3 then area π4 and, finally, return and remain in region π1 while avoiding areas π2 and π3”
Temporal logics as a task language
1 Reachabilityϕ = ♦π2
2 Coverageϕ = ♦π2 ∧ ♦π3 ∧ ♦π4
3 Sequencing♦(π2 ∧ ♦π3)
4 Reachability with avoidance(¬π2 ∧ ¬π3) U π4
5 Recurrent sequencing�♦(π2 ∧ ♦π3)
Visit area R2, then area R3, then area R4, and finally, return andremain in region R1 while avoiding areas R2 and R3
ϕ = ♦(π2 ∧ ♦(π3 ∧ ♦(π4 ∧ (¬π2 ∧ ¬π3) U �π1)))
Indranil Saha Automated Software Synthesis for Robotic Systems 14/48

Program Synthesis - SMT Solver
Specification
SystemInformation
Program
SynthesisTool
(SMT Solver)
Indranil Saha Automated Software Synthesis for Robotic Systems 15/48

Program Synthesis - SMT Solver
Specification
SystemInformation
Program
SynthesisTool
(SMT Solver)
Indranil Saha Automated Software Synthesis for Robotic Systems 15/48

SMT Solver
SAT solver: Checks satisfiability of Boolean formulas
Example: b1 ∧ b2 ∧ (b2→ ¬b1)
SMT Solver: SAT solver empowered with Theory solvers
Example Theories: LRA (Linear Real Arithmetic), EUF(Equality with Uninterpreted Functions), . . .Example: x0 = 0 ∧ y0 = 0 ∧ f (2, 1) = true ∧((x1 = x0 + 2) ∧ (y1 = y0 + 1)) ∨ ((x1 = x0 + 1) ∧ (y1 = y0 + 2))∧((x2 = x1 + 2) ∧ (y2 = y1 + 1)) ∨ ((x2 = x1 + 1) ∧ (y2 = y1 + 2))∧f (x1, y1) 6= true ∧ x2 ≥ 4 ∧ y2 ≥ 3
Formula is satisfiable⇒ generates a modelFormula is unsatisfiable⇒ generates an unsatisfiable core
An SMT solver can be used as an optimization engine- Iteratively search for better solution using binary search
Indranil Saha Automated Software Synthesis for Robotic Systems 16/48

Architecture of a Program Synthesis Tool
Specification
SystemInformation
Program
Constraint Generator
Specification Refinement Tool
SMT Solver
Constraints
Model
Program Generator
Unsat Core
Indranil Saha Automated Software Synthesis for Robotic Systems 17/48

Outline
Background on Synthesis
Compositional Motion Planning
Control Software Synthesis
Ongoing and Future Work
Indranil Saha Automated Software Synthesis for Robotic Systems 18/48

Motion Plan Synthesis
High-Level Planning
Control Algorithm
Design
Real-Time Software
Implementation
Compositional motionplanning for dynamic robots
Synthesis of EmbeddedControl Software
Indranil Saha Automated Software Synthesis for Robotic Systems 19/48

Motion Plan Synthesis
High-Level Planning
Control Algorithm
Design
Real-Time Software
Implementation
Compositional motionplanning for dynamic robots
Synthesis of EmbeddedControl Software
Specification
(LTL formula)
System Information
(Dynamics)
SynthesisTool
Program
(Motion Plan)
Indranil Saha Automated Software Synthesis for Robotic Systems 19/48

Motion PrimitivesShort, kinematically feasible motions forming the basis ofmovements of the robot
Components:u - a precomputed control input
τ - the duration for which the control signalis applied
qi - initial velocity configuration
qf - final velocity configuration
Xrf - relative final position
W - the set of relative blocks through whichthe robot may pass
cost - an estimated energy consumption forexecuting the control law
I F
I
(a) (b)
(c) (d)
F
I F
(a) (b)
I
(c) (d)
F
I F
I
(a) (b)
(c) (d)
F
I F
(a) (b)
I
(c) (d)
F
Note: Motion Primitives are position oblivious
Indranil Saha Automated Software Synthesis for Robotic Systems 20/48

Motion Planning Problem
An input problem instance P = 〈R, I,PRIM,Workspace, ξ,L〉
R - The set of robots
I - Initial state of the group of robots
PRIM = [PRIM1,PRIM2, . . . ,PRIM|R|]
Workspace - Workspace dimension, position of obstacles
ξ - Specification given in Linear Temporal Logic
L - Number of hops in the trajectory
Definition (Motion Planning Problem)
Given an input problem P, synthesize a trajectory of length L
Indranil Saha Automated Software Synthesis for Robotic Systems 21/48

Trajectory Synthesis via SMT Solving [IROS 2014]
Complan(COmpositional Motion PLANner)
http://www.cse.iitk.ac.in/∼isaha/complan.shtml
Φ(0)Prim1−−−→ Φ(1)
Prim2−−−→ Φ(2) . . .Φ(L− 1)PrimL−−−→ Φ(L)
Constraints: (Φ(0) ∈ I) ∧ ‖Transition‖ ∧ ‖Specification‖
Boolean combination of constraints from Linear Arithmetic andEquality with Uninterpreted Functions theories
Complan solves for the L motion primitives using an SMT solver
Indranil Saha Automated Software Synthesis for Robotic Systems 22/48

Example: Satisfy Invariants before Reaching Goal
I2
I1 I4
I3
A B
x
y
Goal: (I1 and I2)→ B(I3 and I4)→ A
Invariants:Maintain a rectangular or linearformation
Maintain a minimum distance
Indranil Saha Automated Software Synthesis for Robotic Systems 23/48

Example: Satisfy Invariants before Reaching Goal
I2
I1 I4
I3
A B
x
y
Goal: (I1 and I2)→ B(I3 and I4)→ A
Invariants:Maintain a rectangular or linearformation
Maintain a minimum distance
No motion plan that satisfies the formation constraint exists
Unsatisfiable Core helps us refining the specification
Indranil Saha Automated Software Synthesis for Robotic Systems 23/48

Example: Satisfy Invariants before Reaching Goal
I2
I1 I4
I3
A B
x
y
Goal: (I1 and I2)→ B(I3 and I4)→ A
Invariants:Maintain a minimum distance
The distance between two quadrotorsis always greater than one unit
Indranil Saha Automated Software Synthesis for Robotic Systems 24/48

Example: Satisfy Invariants before Reaching Goal
I2
I1 I4
I3
A B
x
y
Goal: (I1 and I2)→ B(I3 and I4)→ A
Invariants:Maintain a minimum distance
The distance between two quadrotorsis always greater than one unit
Indranil Saha Automated Software Synthesis for Robotic Systems 24/48

Finding Optimal Trajectory
Find the least number of motion primitives that cangenerate a valid trajectory
Among all trajectories that use the least number of motionprimitives, find the one that incurs the least cost
Indranil Saha Automated Software Synthesis for Robotic Systems 25/48

Example: Satisfy Invariants before Reaching Goal
I2
I1 I4
I3
A B
x
y
Goal: (I1 and I2)→ B(I3 and I4)→ A
Invariants:Maintain a minimum distance
The distance between two quadrotorsis always greater than one unit
Indranil Saha Automated Software Synthesis for Robotic Systems 26/48

Example: Satisfy Invariants before Reaching Goal
I2
I1 I4
I3
A B
x
y
Goal: (I1 and I2)→ B(I3 and I4)→ A
Invariants:Maintain a minimum distance
The distance between two quadrotorsis always greater than one unit
Indranil Saha Automated Software Synthesis for Robotic Systems 26/48
Example: Persistent Surveillance
I1
x
y
G1
G2G4
G3
U2
U1
0 1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
10
11
12
13
14
15
16
9
11 12 13 14
0
U1U1
U2U2
15 16 1718
17
18
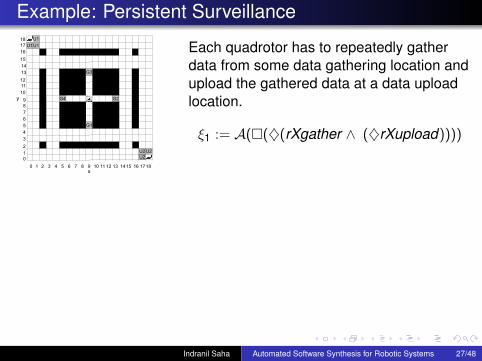
Each quadrotor has to repeatedly gatherdata from some data gathering location andupload the gathered data at a data uploadlocation.
ξ1 := A(�(♦(rXgather ∧ (♦rXupload))))
Indranil Saha Automated Software Synthesis for Robotic Systems 27/48

Example: Persistent Surveillance
I1
x
y
G1
G2G4
G3
U2
U1
0 1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
10
11
12
13
14
15
16
9
11 12 13 14
0
U1U1
U2U2
15 16 1718
17
18
Each quadrotor has to repeatedly gatherdata from some data gathering location andupload the gathered data at a data uploadlocation.
ξ1 := A(�(♦(rXgather ∧ (♦rXupload))))
Indranil Saha Automated Software Synthesis for Robotic Systems 27/48

Motion Plan Synthesis for a Swarm of Robots [ICCPS 2016]
Specification: ¬obstacles U reach
Indranil Saha Automated Software Synthesis for Robotic Systems 28/48

Motion Plan Synthesis for a Swarm of Robots [ICCPS 2016]
Specification: ¬obstacles U reach
Main Idea:Synthesize optimal trajectory for eachrobot independently
Indranil Saha Automated Software Synthesis for Robotic Systems 28/48

Motion Plan Synthesis for a Swarm of Robots [ICCPS 2016]
Specification: ¬obstacles U reach
R2 R2'
R1
R1'
R2 R2'R1 R1'
Main Idea:Synthesize optimal trajectory for eachrobot independently
Indranil Saha Automated Software Synthesis for Robotic Systems 28/48

Motion Plan Synthesis for a Swarm of Robots [ICCPS 2016]
Specification: ¬obstacles U reach
R2 R2'
R1
R1'
R2 R2'R1 R1'
Main Idea:Synthesize optimal trajectory for eachrobot independentlyFind a feasible ordering for the robots
Indranil Saha Automated Software Synthesis for Robotic Systems 28/48

Motion Plan Synthesis for a Swarm of Robots [ICCPS 2016]
Specification: ¬obstacles U reach
R2 R2'
R1
R1'
R2 R2'R1 R1'
Main Idea:Synthesize optimal trajectory for eachrobot independentlyFind a feasible ordering for the robotsSynthesize final trajectories accordingto the assigned priorities
Treat the robots with higher prioritiesas dynamic obstaclesIntroduce minimum delay to executethe optional trajectory to avoidcollision
Indranil Saha Automated Software Synthesis for Robotic Systems 28/48

Motion Plan Synthesis for a Swarm of Robots [ICCPS 2016]
Specification: ¬obstacles U reach
Implan(Incremental Motion PLANner)
R2 R2'
R1
R1'
R2 R2'R1 R1'
Main Idea:Synthesize optimal trajectory for eachrobot independentlyFind a feasible ordering for the robotsSynthesize final trajectories accordingto the assigned priorities
Treat the robots with higher prioritiesas dynamic obstaclesIntroduce minimum delay to executethe optional trajectory to avoidcollision
Indranil Saha Automated Software Synthesis for Robotic Systems 28/48

Motion Plan Synthesis for a Swarm of Robots
x
y
0 1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
10
11
12
13
14
9
11 12 13 14
0
15
15 i1 i2
i3
i4
i5 i6
f1
f2
f3f4
f5
f4
f6
Ordering:1: R3 2: R6 3: R24: R4 5: R1 6: R5
Indranil Saha Automated Software Synthesis for Robotic Systems 29/48

Motion Plan Synthesis for a Swarm of Robots
x
y
0 1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
10
11
12
13
14
9
11 12 13 14
0
15
15 i1 i2
i3
i4
i5 i6
f1
f2
f3f4
f5
f4
f6
Ordering:1: R3 2: R6 3: R24: R4 5: R1 6: R5
Challenge:What if an ordering does notexist?
Indranil Saha Automated Software Synthesis for Robotic Systems 29/48

Motion Plan Synthesis for a Swarm of Robots
x
y
0 1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
10
11
12
13
14
9
11 12 13 14
0
15
15 i1 i2
i3
i4
i5 i6
f1
f2
f3f4
f5
f4
f6
Ordering:1: R3 2: R6 3: R24: R4 5: R1 6: R5
Challenge:What if an ordering does notexist?
R2 R2'
R1
R1'
R2 R2'R1 R1'
Indranil Saha Automated Software Synthesis for Robotic Systems 29/48

Example: Motion Planning in a Compact Workspace
Figure: caption
25 quadrotors movingin a closed place
Specification:¬obstacles U reach
Indranil Saha Automated Software Synthesis for Robotic Systems 30/48

Outline
Background on Synthesis
Compositional Motion Planning
Control Software Synthesis
Ongoing and Future Work
Indranil Saha Automated Software Synthesis for Robotic Systems 31/48

Control Software Synthesis
High-Level Planning
Control Algorithm
Design
Real-Time Software
Implementation
Compositional motionplanning for dynamic robots
Synthesis of EmbeddedControl Software
Indranil Saha Automated Software Synthesis for Robotic Systems 32/48

Control Software Synthesis
High-Level Planning
Control Algorithm
Design
Real-Time Software
Implementation
Compositional motionplanning for dynamic robots
Synthesis of EmbeddedControl Software
Specification
(Stability)
System Information
(Model of the Plant)Synthesis
Tool
Program
(Controller Software)
Platform Information
(Number of Bits)
Indranil Saha Automated Software Synthesis for Robotic Systems 32/48

Specification for Ideal Controller: Exponential Stability
The plant converges to a desired behavior under the actions ofthe controller
I
ρ
R
II'
RR'
Indranil Saha Automated Software Synthesis for Robotic Systems 33/48

Specification for Ideal Controller: Exponential Stability
The plant converges to a desired behavior under the actions ofthe controller
I
ρ
R
II'
RR'
Example:In the steady state, the quadrotor will be at 4m away from
the x-axis and 6m away from the y-axis
Indranil Saha Automated Software Synthesis for Robotic Systems 33/48

Specification for Implemented Controller: PracticalStability
I
ρ
R
II'
RR'
Mathematical Model
I ρI
R
II'
RR'
Software Implementation
The state of the plant eventually reaches a bounded region andremains there under the action of the controller
Specification is given in terms of Region of Practical Stability
Indranil Saha Automated Software Synthesis for Robotic Systems 34/48

Specification for Implemented Controller: PracticalStability
I
ρ
R
II'
RR'
Mathematical Model
I ρI
R
II'
RR'
Software Implementation
The state of the plant eventually reaches a bounded region andremains there under the action of the controller
Specification is given in terms of Region of Practical Stability
Example:In the steady state, the quadrotor will be between 3.9-4.1m away
from the x-axis and 5.8-6.2m away from the y-axisIndranil Saha Automated Software Synthesis for Robotic Systems 34/48

Verification Question [EMSOFT2010]
Given:Dynamics of the plantA stabilizing controllerThe number of bits of the target processorSpecification on practical stability
Verify: If the software implementation of the controller satisfiesthe specification on practical stability
Reduces to computing the upper bound on the region ofpractical stability
Indranil Saha Automated Software Synthesis for Robotic Systems 35/48

Bound on the Region of Practical Stability
I
ρ
R
II'
RR'
Mathematical Model
I ρI
R
II'
RR'
Software Implementation
Indranil Saha Automated Software Synthesis for Robotic Systems 36/48

Bound on the Region of Practical Stability
I
ρ
R
II'
RR'
Mathematical Model
I ρI
R
II'
RR'
Software Implementation
Theorem[EMSOFT2010] If γ is the L2-Gain of a control system, b is abound on the implementation error, then
ρ ≤ γ × b
Indranil Saha Automated Software Synthesis for Robotic Systems 36/48

Bound on the Region of Practical Stability
I
ρ
R
II'
RR'
Mathematical Model
I ρI
R
II'
RR'
Software Implementation
Theorem[EMSOFT2010] If γ is the L2-Gain of a control system, b is abound on the implementation error, then
ρ ≤ γ × b
Separation of concerns:
Compute L2-gain from the mathematical model(standard problem in control theory)
Compute the bound on implementation error(analysis of the implementation)
Indranil Saha Automated Software Synthesis for Robotic Systems 36/48

Example of Controller Program
Control Law (Vehicle Steering) :u = 0.81× (In1− In2)− 1.017× In3
Real-valued programReal In1, In2, In3;Real Subtract, Gain, Gain2, Out1;
static void output(void) {Subtract = In1 - In2;Gain = 0.81 * Subtract;Gain2 = 1.017 * In3;Out1 = Gain - Gain2;
}
Fixed-point implementation (16-bit):short int In1, In2, In3;short int Subtract, Gain, Gain2, Out1;
static void output(void) {Subtract = (short int)(In1 - In2);Gain = (short int)(26542 * Subtract� 15);Gain2 = (short int)(16663 * In3� 14);Out1 = (short int)(((Gain� 1) - Gain2)� 1);
}
Indranil Saha Automated Software Synthesis for Robotic Systems 37/48

Example of Controller Program
Control Law (Vehicle Steering) :u = 0.81× (In1− In2)− 1.017× In3
Real-valued programReal In1, In2, In3;Real Subtract, Gain, Gain2, Out1;
static void output(void) {Subtract = In1 - In2;Gain = 0.81 * Subtract;Gain2 = 1.017 * In3;Out1 = Gain - Gain2;
}
Fixed-point implementation (16-bit):short int In1, In2, In3;short int Subtract, Gain, Gain2, Out1;
static void output(void) {Subtract = (short int)(In1 - In2);Gain = (short int)(26542 * Subtract� 15);Gain2 = (short int)(16663 * In3� 14);Out1 = (short int)(((Gain� 1) - Gain2)� 1);
}
What is the bound on the error?
Can be formulated as an SMT solving problem over Booleancombination of linear arithmetic constraints
Indranil Saha Automated Software Synthesis for Robotic Systems 37/48

Controller Stability Analyzer: Costan
An automatic tool to computethe bound on the region ofpractical stability
Supports both linear andnonlinear controllers, fornonlinear controllers bothpolynomial implementation andlookup table basedimplementation
Model of
Plant
ModelOf
Controller
Fixed-point Code generator
ImplementationOf
Controller
StrongestPost-conditionComputation
L2 Gain Computation
Error-boundComputation
Bound onStability Region
Computation
Computed Bound
Control Theory
Indranil Saha Automated Software Synthesis for Robotic Systems 38/48

Synthesis Question [EMSOFT 2012]
Is it possible to synthesize a controller that minimizes the regionof practical stability?
Indranil Saha Automated Software Synthesis for Robotic Systems 39/48

Synthesis Question [EMSOFT 2012]
Is it possible to synthesize a controller that minimizes the regionof practical stability?
Traditionally, controllers are synthesized minimizing LQR costfunction
LQR cost = state cost + control coststate cost = sum of the deviations of the states from their desiredvaluescontrol cost = energy expended by the control action
Indranil Saha Automated Software Synthesis for Robotic Systems 39/48

ExampleModel of a Vehicle Steering:[
ξ̇1
ξ̇2
]=
[0 g
h1 0
] [ξ1ξ2
]+
[10
](υ + ω)
y =[
av0bh
v20
bh
] [ ξ1ξ2
]+ ν
LQR Controller:
K1 = [5.1538, 12.9724]
LQR cost function is 264.1908
Another Controller:
K2 = [3.0253, 12.6089]
LQR cost function is 284.1578
Indranil Saha Automated Software Synthesis for Robotic Systems 40/48

Example (Cont.)
0 5 10 15−0.5
0
0.5
1
y
5 10 150
0.005
0.01
0.015
time
y
K2 and L2K1 and L1
K2 and L2K1 and L1
There is a trade-off between LQR cost and the region of practicalstability
Indranil Saha Automated Software Synthesis for Robotic Systems 41/48

Problem Statement
Design a controller optimizing the following objectives:
The LQR cost
The bound on the region of practical stability
Indranil Saha Automated Software Synthesis for Robotic Systems 42/48

Controller Synthesis Tool: Ocsyn
Co-optimizes LQR cost and the bound on region ofpractical stability
Employs stochastic optimization — needs to compute thevalue of the objective functions for many differentcontrollers
Employs a convex optimization tool to compute LQR cost
Uses Costan to compute the region of practical stability
Synthesizes controller
with significant improvement on the bound on region ofpractical stability
without significant degradation on the LQR cost
Example: vehicle steeringA factor of 10 improvement in the region of practical
stability with only 10% degradation in LQR costIndranil Saha Automated Software Synthesis for Robotic Systems 43/48

Outline
Background on Synthesis
Compositional Motion Planning
Control Software Synthesis
Ongoing and Future Work
Indranil Saha Automated Software Synthesis for Robotic Systems 44/48

Ongoing Research
Complan:
New class of properties
Timing specification
New System Model
Mixed Logical Dynamical SystemTime varying motion primitives
Implan:
Linear Temporal Logic Motion Planning for large number ofrobots
Indranil Saha Automated Software Synthesis for Robotic Systems 45/48

Reactive, Robust and Distributed Motion Planning
Goal: Devise tools and techniques for synthesizing motionplanner that is
ReactiveSelf-Driven Car, Robocup
RobustPath planning for a drone in the presence of gust of wind
DistributedPath planning for an aircraft in a congested airspace
Challenges:How to make existing solvers more amenable to solveplanning problems?How to build domain specific solvers? (e.g., a solver thathas control theoretic intelligence)
Indranil Saha Automated Software Synthesis for Robotic Systems 46/48

Big Data Analytics and Security for CPS
Application of Big Data analytics in cyber-physical systemsAutomatic air-traffic controllerReal-time decision making by unmanned vehicles
Security for cyber-physical systemsDevise defense against attacks on unmanned aerialvehicles
Indranil Saha Automated Software Synthesis for Robotic Systems 47/48

Thank You!!http://www.cse.iitk.ac.in/∼isaha
Indranil Saha Automated Software Synthesis for Robotic Systems 48/48