cap 05 medicion de nivel
DESCRIPTION
Cap 05 Medicion de NivelTRANSCRIPT
ÍNDICE
Prólogo..........................................................................................................................XVPrólogo a la sexta edición................................................................................XVII
Capítulo 11.11.2
1.3
Capítulo 22.12.2
2.3
2.42.5
Generalidades ............................................................................... . 1Introducción .................................................................................. . 1Definiciones en control ............................................................... . 21.2.l Campo de medida (range) ............................................. . 31.2.2 Alcance (span) ................................................................. . 41.2.3 Error .................................................................................. . 41.2.4 Incertidumbre de la medida (uncertainty) .................... 51.2.5 Exactitud ........................................................................... . 71.2.6 Precisión (accuracy) ....................................................... .. 71.2.7 Zona muerta (dead zone o dead band) ........................ 81.2.8 Sensibilidad (sensitivity) ................................................. .. 81.2.9 Repetibilidad (repeatibility)"-:........................................... 91.2.10 Histéresis (hysteresis) ...................................................... . 91.2.11 Otros términos....................................................................10Clases de instrumentos..................................................................121.3.1 En función del instrumento...................................................121.3.2 En función de la variable de proceso..................................201.3.3 Código de identificación de instrumentos.........22
Transmisores..................................51Generalidades.................................51Transmisores neumáticos....................................................................532.2.l Bloque amplificador de dos etapas....................................532.2.2 Transmisor de equilibrio de movimientos..........................562.2.3 Transmisor de equilibrio de fuerzas...................................572.2.4 Transmisor de equilibrio de momentos.............................58Transmisores electrónicos...................................................................582.3.1 Transmisores electrónicos de equilibrio de fuerzas..........58
2.3.1.1 Detector de posición de inductancia....................582.3.1.2 Transformador diferencial..............60
2.3.2 Transmisores digitales.....................60Comunicaciones.................................................................................65Comparación de transmisores..........................................................69
VIII Índice
Capítulo 33.13.23.33.4
3.5
"' Capítulo 44.1
4.2
Medidas de presión ...................................................................... .Unidades y clases de presión .................................................... ..Elementos mecánicos ................................................................. ..Elementos neumáticos ........................................................ ..........Elementos electromecánicos ...................................................... .3.4.1 Transmisores electrónicos de equilibrio de fuerzas .... 3.4.2 Transductores resistivos .................................................. . 3.4.3 Transductores magnéticos .............................................. . 3.4.4 Transductores capacitivos ............................................... .3.4.5 Galgas extensométricas (strain gage) ............................ 3.4.6 Transductores piezoeléctricos ........................................ . Elementos electrónicos de vacío .............................................. ..3.5.1 Transductores mecániéos de fuelle y de diafragma .... 3.5.2 Medidor McLeod ............................................................. . 3.5.3 Transductores térmicos ................................................... . 3.5.4 Transductores de ionización .......................................... .
Medidas de caudal ....................................................................... .Medidores volumétricos .............................................................. .4.1.1 Instrumentos de presión diferencial ............................ ..
4.1.1.1 Fórmula general ................................................ .4.1.1.2 Elementos de presión diferencial ...................4.1.1.3 Resumen de las normas ISO 5167-1980 ........ 4.1.1.4 Tubo Pitot .......................................................... . 4.1.1.5 Tubo Annubar .................................................. .4.1.1.6 Transmisores de fuelle y de diafragma .......... 4.1.1.7 Integradores ....................................................... .
4.1.2 Área variable (rotámetros) ............................................ .4.1.3 Velocidad .......................................................................... .
4.1.3.1 Vertederos y Venturi.. .................................... ..4.1.3.2 Turbinas ............................................................. .4.1.3.3 Transductores ultrasónicos .............................
.. 4.1.4 Fuerza (medidor de placa)
............................................ ..4.1.5 Tensión inducida (medidor magnético) ...................... ..
4.1.5.1 Medidor magnético de caudal......................... 4.1.6 Desplazamiento positivo .................................................
. 4.1.6.1 Medidor de disco oscilante ............................ ..4.1.6.2 Medidor de pistón oscilante .......................... ..4.1.6.3 Medidor de pistón alternativo ........................
. 4.1.6.4 Medidor rotativo ............................................... .4.1.6.5 Medidor de paredes deformables ................... 4.1.
Índi I6.6 Accesorios .......................................................... .
4.1.7 Torbellino y Vórtex ........................................................ .4.1.8 Oscilante ............................................................................ .Medidores de caudal masa ........................................................ ..4.2.1
Compensación de variaciones de densidad del fluido en medidores volumétricos ............................................ .
71717375767678798081838484848687
91929292
105107128129130134136146146150151153154154171171172173173175176177179179
180
VIII Índice
4.2.2 Medición directa del caudal-masa ................................. 1854.2.2.1 Medidores térmicos de caudal......................... 1864.2.2.2 Medidores de momento angular..................... 1874.2.2.3 Medidor de Coriolis .......................................... 189
4.3 Comparación de características de los medidores de caudal. 192
Capítulo 5 Medición de nivel. ........................................................................ . 1935.1 Medidores de nivel de líquidos ................................................. . 193
5.1.1 Instrumentos de medida directa .................................... . 1945.1.2 Instrumentos basados en la presión hidrostática. Me-
didor manométrico. Membrana. Burbujeo. Presióndiferencial. ......................................................................... . 197
5.1.3 Instrumento basado en el desplazamiento .................. . 2055.1.4 Instrumentos basados en características eléctricas del
líquido ................................................................................. . 2075.2 Medidores de nivel de sólidos ..................................................... . 213
5.2.1 Detectores de nivel de punto fijo .................................. . 2145.2.2 Detectores de nivel continuos ......................................... . 218
Capítulo 6 Medida de temperatura ............................................................... . 2236.1 Introducción .................................................................................. . 2236.2 Termómetro de vidrio ................................................................. . 2246.3 Termómetro bimetálico ............................................................... . 2256.4 Termómetro de bulbo y capilar ................................................. . 2256.5 Termómetros de resistencia ....................................................... . 2276.6 Termistores .............................................................
v·····················236
6.7 Termopares ................................................................................... . 2376.7.1 Leyes, curvas y tablas características, tubos de pro-
tección y su selección ..................................................... . 2376.7.2 Circuito galvanométrico ................................................. . 2686.7.3 Circuito potenciométrico ................................................ . 2706.7.4 Comparación entre circuitos galvanométricos y po-
tenciométricos .................................................................. . 2766.7.5 Verificación de un instrumento y de un termopar ..... 276
6.8 Pirómetros de radiación .............................................................. . 2776.8.1 Pirómetros ópticos ........................................................... . 2786.8.2 Pirómetro de infrarrojos ................................................. . 2796.8.3 Pirómetro fotoeléctrico ................................................... . 2816.8.4 Pirómetros de radiación total ........................................ . 282
6.9 Velocidad de respuesta de los instrumentos de temperatura 2966.10 Tabla comparativa de características ........................................ . 300
Capítulo 7 Otras variables .............................................................................. . 3017.1 Variables físicas ............................................................................ . 301
7.1.1 Peso .................................................................................... . 3017.1.2 Velocidad .......................................................................... . 307
Índi X
7.2
7.1.2.1 Tacómetros mecánicos ..................................... .7.1.2.2 Tacómetros eléctricos ...................................... .
7.1.3 Densidad y pesó específico ............................................ .
7.1.3.1 Introducción ..................................................... ..7.1.3.2 Areómetros ....................................................... ..
7.1.3.3 Métodos de presión diferencial.. ..................... 7.1.3.4 Método de desplazamiento
.............................. 7.1.3.5 Refractómetro ................................................... . 7.1.3.6 Método de
radiación ........................................ .7.1.3.7 Método de punto de ebullición ....................... 7.1.3.8 Medidor de ultrasonidos ................................ .. 7.1.3.9 Medidores inerciales ........................................ . 7.1.3.10 Medidor de Coriolis ........................................ .. 7.1.3.11 Medidores de balanza ...................................... .
7.1.4 Humedad y punto de rocío ............................................ .
7.1.4.1 Humedad en aire y gases ............................... ..7.1.4.2 Humedad en sólidos ....................................... ..7.1.4.3 Punto de rocío .................................................. ..
7.1.5 Viscosidad y consistencia .............................................. ..7.1.5.1 Introducción ...................................................... .7.1.5.2 Viscosímetros .................................................... .7.1.5.3 Medidores de consistencia .............................. .7.1.5.4 Tabla comparativa ............................................ .
7.1.6 Llama ................................................................................. .7.1.6.1 Detector de calor .............................................. .7.1.6.2 Detectores de ionización-rectificación ........... 7.1.6.3 Detectores de radiación .................................. ..7.1.6.4 Tabla comparativa de detectores .................... 7.1.6.5 Programadores .................................................. .
7.1.7 Oxígeno disuelto .............................................................. .7.1.8 Turbidez ........................................................................... ..7.1.9 Intensidad de radiación solar ........................................ . Variables químicas ...................................................................... ..7.2.1 Conductividad .................................................................. .
7.2.2pH
..........
..........
..........
..........
..........
..........
..........
..........
.. .7.2.3
Redox
(potencial
de oxidación-reducción) ..................
. 7.2.4
Concentrac
ión de
gases .................................................. .
7.2.4.1
Conductivi
dad térmi
ca .................................... ..
7

X Índi.2.4.2 Paramagnetismo del oxígeno .......................... . 7.2.4.3 Analizador de infrarrojos ................................ .
308308310310311312314315316317317319321322323324327329334334
336337339339340340341343343346347348349349353357358358360362
Capítulo 8 Elementos finales de control.. .................................................... . 3658.1 Válvulas de control ...................................................................... . 365
8.1.1 Generalidades ................................................................... . 3658.1.2 Tipos de válvulas ............................................................ .. 366
8.1.2.1 Válvula de globo .............................................. . 366
Índi X
8.1.38.1.48.1.5
8.1.68.1.7
8.1.8
8.1.9
8.1.2.2 Válvula en ángulo ............................................ .8.1.2.3 Válvula de tres vías .......................................... .8.1.2.4 Válvula de jaula ................................................ .8.1.2.5 Válvula de compuerta ...................................... .8.1.2.6 Válvula en Y .................................................... ..8.1.2.7 Válvula de cuerpo partido .............................. . 8.1.2.8 Válvula Saunders .............................................. .8.1.2.9 Válvula de compresión .................................... .8.1.2.10 Válvula de obturador excéntrico rotativo .....8.1.2.11 Válvula de obturador cilíndrico excéntrico ... 8.1.2.12 Válvula de mariposa ........................................ . 8.1.2.13 Válvula de bola ................................................ ..8.1.2.14 Válvula de orificio ajustable .......................... .. 8.1.2.15 Válvula de flujo axial....................................... . Cuerpo de la válvula ...................................................... .. Tapa de la válvula .......................................................... .. Partes internas de la válvula. Obturador y asientos ... 8.1.5.1 Generalidades .................................................... . 8.1.5.2 Materiales .......................................................... .8.1.5.3 Características de caudal inherente ................8.1.5.4 Características de caudal efectivas
.................8.1.5.5 Selección de la característica de la válvula ... Corrosión y erosión en las válvulas. Materiales .......... Servomotores .................................................................... . 8.1.7.1 Servomotor neumático ..................................... . 8.1.7.2 Servomotor eléctrico .......................................
..8.1.7.3 Tipos de acciones en las válvulas de control
Accesorios ......................................................................... . 8.1.8.1 Camisa de calefacción ......................................
. 8.1.8.2 Posicionador ...................................................... .
8.1.8.3 Volante de accionamiento manual ................. 8.1.8.4 Repetidor ........................................................... .8.1.8.5 Transmisores de posición y microrruptores
de final de carrera ............................................ .
8.1.8.6 Válvula de solenoide de tres vías .................. . 8.1.8.7 Válvula de enclavamiento .............................. ..8.1.8.8 Válvula de Kv o Cv o carrera ajustables ........
Dimensionam
iento de la
válvula.
Coeficientes Kv y
Cv 8.1.9.1 Defini
ciones .......................................................
. 8.1.9.2 Fórmul
a general ............................................
... .. 8.1.9.3 Líquidos ..............................................................
. 8.1.9.4 Gases
...........
...........
...........
...........
...........
........... .
8.1.9.5 Vapores .........
X Índi..................................................... . 8.1.9.6
Régimen bifásico
.......................
....................... .
8.1.9.7 Resumen de cálculo de coeficientes de vál-
366368368368368368368369369369369370370370371374377377378379382385
391400400412416 ,.418418419424424
425425425427428428429439450457460
vulas............................................................................463
8.1.10 Ruido en las válvulas de control.................................... 4668.1.10.1 Generalidades..................................................... 4668.1.10.2 Causas del ruido en las válvulas ..................... 4688.1.10.3 Reducción del ruido.......................................... 470
8.2 Elementos finales electrónicos.................................................... 4728.2.1 Amplificador magnético saturable................................. 4728.2.2 Rectificadores controlados de silicio............................. 4748.2.3 Válvula inteligente............................................................ 478
8.3 Otros elementos finales de control ............................................ 478
Capítulo 9 Regulación automática ................................................................ . 4819.1 Introducción .................................................................................. . 4819.2 Características del proceso ......................................................... . 4819.3 Sistemas de control neumáticos y eléctricos ........................... . 487
1 Índi
9.4
9.59.69.79.8
9.3.1 Control todo-nada ........................................................... .9.3.2 Control flotante .............................................................. ..9.3.3 Control proporcional de tiempo variable ..................... 9.3.4 Control proporcional. ...................................................... . 9.3.5 Control proporcional + integral................................... .. 9.3.6 Control P Oporcional + derivado ................................. ..9.3.7 Control proporcional + integral + derivado ................9.3.8 Cambio automático-manual-automático ...................... .9.3.9 Tendencias en los instrumentos neumáticos ................ Sistemas de control electrónicos y digitales ........................... .. 9.4.1 Generalidades .................................................................. .. 9.4.2 Control todo-nada ........................................................... .9.4.3 Control proporcional de tiempo variable ..................... 9.4.4 Control proporcional. ...................................................... . 9.4.5 Control integral ................................................................ . 9.4.6 Control derivativo ........................................................... .9.4.7 Control proporcional + integral + derivativo ..............9.4.8 Cambio automático-manual-automático ...................... . 9.4.9 Controladores digitales ................................................... . Selección del sistema de control .............................................. .. Criterios de estabilidad en el control ....................................... . Métodos de ajuste de controladores ......................................... . Otros tipos de control ................................................................. . 9.8.1 Generalidades ................................................................... . 9.8.2 Control en cascada .......................................................... . 9.8.3 Programadores ................................................................. . 9.8.4 Control de relación ........................................................ .. 9.8.5 Control anticipativo ......................................................... . 9.8.6 Control de gama partida ................................................ . 9.8.7 Control selectivo .............................................................. . 9.8.8 Control de procesos discontinuos ................................. . 9.8.9 Controladores no lineales .............................................. .
487488489490494498502504505506506507508509512513515515515521523525533533534537541543547548549551
Índice
9.8.10 Instrumentos auxiliares ................................................... .
XIII
5529.9 Seguridad intrínseca ..................................................................... . 554
9.9.1 Introducción ...................................................................... . 5549.9.2 Nivel de energía de seguridad ...................................... ..9.9.3 Mecanismos de la ignición en circuitos de baja ten-
555
sión ..................................................................................... . 5569.9.4 Clasificaciones de áreas peligrosas ................................ 5589.9.5 Normas .............................................................................. . 5609.9.6 Barreras Zener ................................................................ .. 5609.9.7 Barreras galvánicas .......................................................... . 5629.9.8 Factores de seguridad ..................................................... . 562
9.10 Control por computador ............................................................. . 5639.10.1 Generalidades ................................................................... . 5639.10.2 Control DDC ................................................................... . 5659.10.3 Control supervisor ........................................................... . 5689.10.4 Control distribuido ......................................................... .. 5709.10.5 Sistemas de control avanzado........................................ . 5749.10.6 Sistemas expertos.............................................. ................. 5809.10.7 Control por redes neuronales ......................................... 5839.10.8 Control por lógica difusa (fuzzy) ................................. .
5859.11 Evolución de la instrumentación .............................................. .. 587
Capítulo 10 Calibración de los instrumentos ................................................ . 60110.1 Introducción .................................................................................. . 60110.2 Errores de los instrumentos. Procedimiento general de cali-
bración ........................................................................................... . 60210.3 Calibración de instrumentos de presión, nivel y caudal......... 61010.4 Calibración de instrumentos de temperatura .......................... . 61410.5 Comprobación de válvulas de control ......................................
.619
10.6 Aparatos electrónicos de comprobación .................................. . 62010.7 Calidad de calibración según Norma ISO 9002 ....................... 621
Capítulo 11 Aplicaciones en la industria. Esquemas típicos de control .... 62511.1 Generalidades ............................................................................... . 62511.2 Calderas de vapor ........................................................................ . 625
11.2.1 Control de combustión .................................................. .. 62611.2.2 Control de nivel .............................................................. .. 62911.2.3 Seguridad de llama .......................................................... . 632
11.3 Secaderos y evaporadores ........................................................... . 63211.4 Horno túnel ................................................................................... . 63511.5 Columnas de destilación ............................................................. . 63711.6 Intercambiadores de calor .......................................................... . 63811.7 Control del reactor en una central nuclear .............................. 641
Apéndice. Análisis dinámico de los instrumentos....................................................645A.1 Generalidades.....................................................................................645A.2 Análisis dinámico de los transmisores..............................................658
A.2.1A.2.2
Elementos fundamentales ............................................... Diagrama de bloques, diagrama de Bode y función
658
de transferencia de un transmisor ................................. 662A.2.2.1 Transmisor neumático....................................... 662A.2.2.2 Transmisor electrónico...................................... 666A.2.2.3 Transmisor digital .............................................. 667
A.2.3 Velocidad de respuesta de los transmisores ................ 667A.2.3.1 Transmisores neumáticos.................................. 667A.2.3.2 Transmisores electrónicos o digitales ............. 670
Análisis dinámico de los controladores........................................671A.3.1 Introducción....................................................................... 671A.3.2 Acción proporcional......................................................... 671A.3.3 Acción proporcional + integral ...................................... 675A.3.4 Acción proporcional + derivada .................................... 677A.3.5 Acción proporcional + integral + derivada.................. 686A.3.6 Ensayo de controladores................................................. 689Iniciación a la optimización de procesos.....................................692A.4.1 Generalidades.................................................................... 692A.4.2 Análisis experimental del proceso................................. 693A.4.3 Estabilidad ......................................................................... 695Control avanzado................................................................................715A.5.1 Correctores ........................................................................ 715A.5.2 Control multivariable....................................................... 717A.5.3 Control óptimo.................................................................. 718A.5.4 Control adaptativo............................................................ 720A.5.5 Control predictivo ............................................................ 723A.5.6 Control por redes neuronales......................................... 726A.5.7 Control por lógica difusa................................................. 727A.5.8 Estructuras del control avanzado................................... 730
1 Índi
A.3
A.4
A.5
Referencias.....................................................................................................................733
Glosario...................................................................................................................741
CAPITULO 5
MEDICION DE NIVEL
En la industria, la medición de nivel es muy importante, tanto desde el punto de vista del funcionamiento correcto del proceso como de la consideración del ba lance adecuado de materias primas o de productos finales.
La utilización de instrumentos electrónicos con microprocesador en la me dida de otras variables, tales como la presión y la temperatura, permite añadir«inteligencia» en la medida del nivel, y obtener precisiones de lectura altas, del orden de ± 0,2 %, en el inventario de materias primas o finales o en transformación en los tanques del proceso. El transmisor de nivel «inteligente» hace posible la interpretación del nivel real (puede .eliminar o compensar la influencia de la espuma en flotación del tanque, en la lectura), la eliminación de las falsas alar mas (tanques con olas en la superficie debido al agitador de paletas en movi miento), y la fácil calibración del aparato en cualquier punto de la línea de transmisión.
El transmisor o varios transmisores pueden conectarse, a través de una cone xión RS-232, a un ordenador personal, que con el software adecuado, es capaz de configurar transmisores inteligentes.
Los instrumentos de nivel pueden dividirse en medidores de nivel de líqui dos y de sólidos que son dos mediciones claramente diferenciadas y que se estu diarán separadamente por sus distintas peculiaridades y las aplicaciones particu lares de las que son objeto.
5.1 Medidores de nivel de líquidos
Los medidores de nivel de líquidos trabajan midiendo, bien directamente la altura de líquido sobre una línea de referencia, bien la presión hidrostática, bien el desplazamiento producido en un flotador por el propio líquido contenido en el tanque del proceso, o bien aprovechando características eléctricas del líquido.
Los primeros instrumentos de medida directa se dividen en: sonda, cinta y plomada, nivel de cristal e instrumentos de flotador.
Los aparatos que miden el nivel aprovechando la presión hidrostática se dividen en:
19 Instrumentación
Medidor manométrico Medidor de membrana Medidor de tipo burbujeoMedidor de presión diferencial de diafragma
El empuje producido por el propio líquido lo aprovecha el medidor de des plazamiento a barra de torsión.
Los instrumentos que utilizan características eléctricas del líquido se clasi fican en:
Medidor resistivo Medidor conductivo Medidor capacitivo Medidor ultrasónico Medidor de radiación Medidor de láser
5.1.1 Instrumentos de medida directa
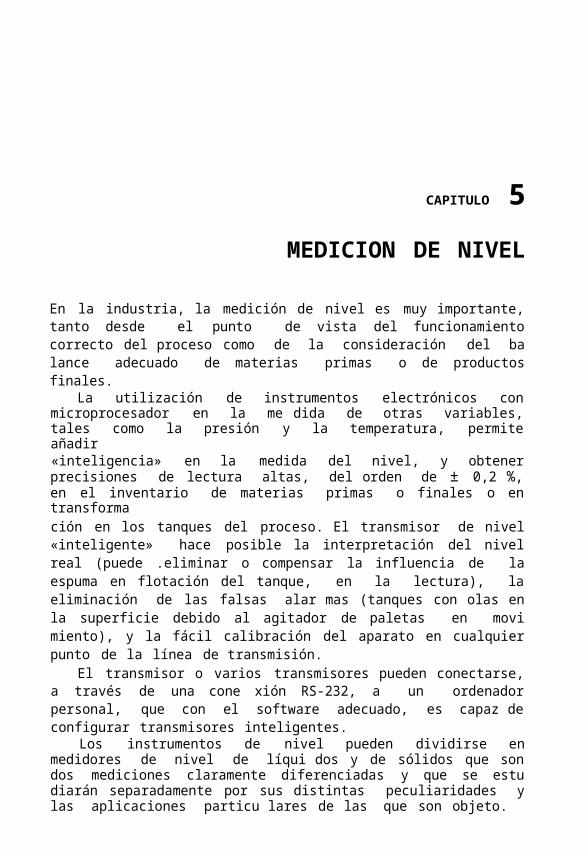
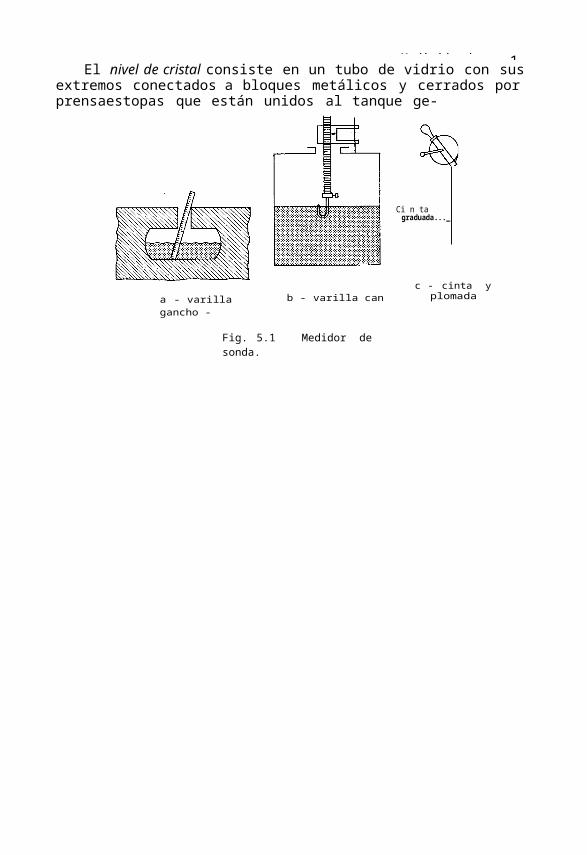
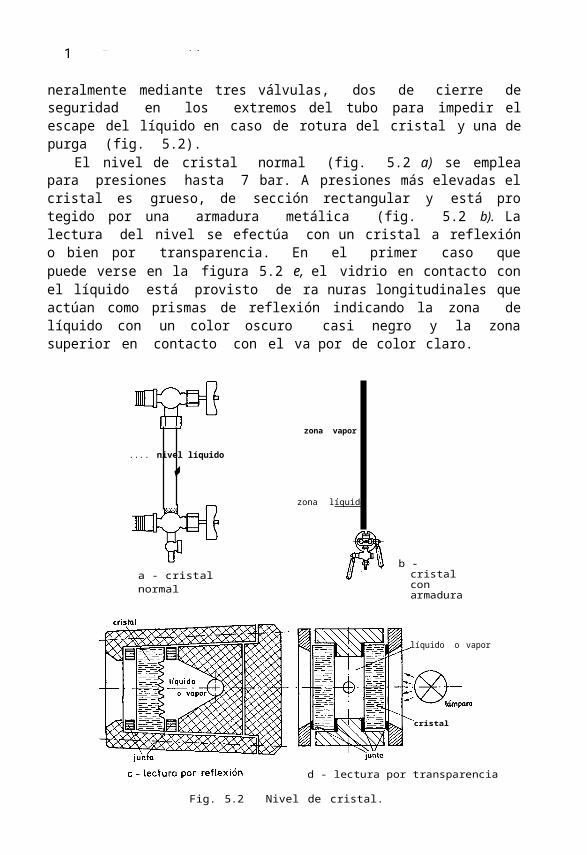
El medidor de sonda (fig. 5.1 a) consiste en una varilla o regla graduada, de la longitud conveniente para introducirla dentro del depósito. La determin,ación del nivel se efectúa por lectura directa de la longitud mojada por el líquido. En el momento de la lectura el tanque debe estar abierto a presión atmosférica. Se utiliza generalmente en tanques de fuel-oil o gasolina. Otro medidor consiste erruna va
rilla graduada, con un gancho que se sumerge en el seno del líquido y se levanta después hasta que el gancho rompe la superficie del líquido. La distancia desde esta superficie hasta la parte superior del tanque representa indirectamente el nivel. Se emplea en tanques de agua a presión atmosférica. Otro sistema parecido es el medidor de cinta graduada y plomada representado en la figura 5.1 e, que se emplea cuando es difícil que la regla graduada tenga acceso al fondo del tanque.
El nivel de cristal consiste en un tubo de vidrio con sus extremos conectados a bloques metálicos y cerrados por prensaestopas que están unidos al tanque ge-
Ci n tagraduada..._
a - varilla b - varilla can gancho -
Fig. 5.1 Medidor de sonda.
c - cinta yplomada
1
Medición de 1
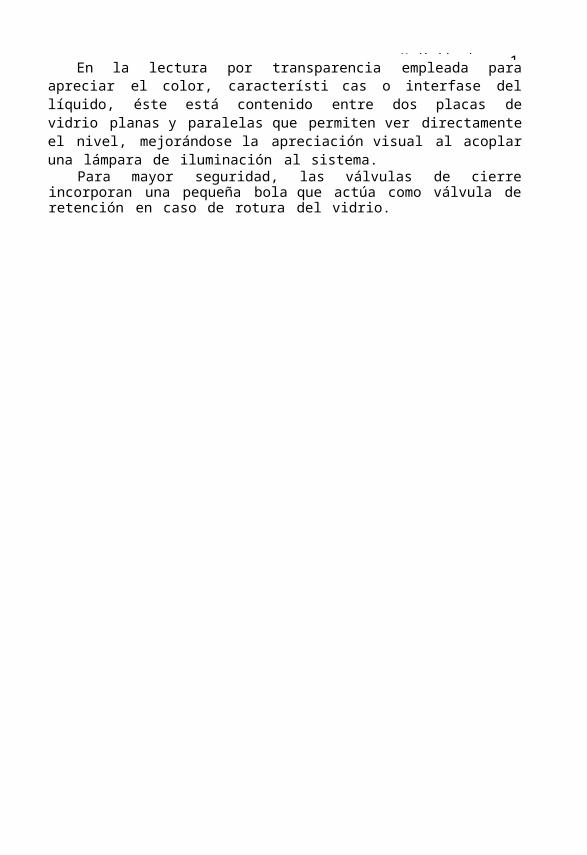
neralmente mediante tres válvulas, dos de cierre de seguridad en los extremos del tubo para impedir el escape del líquido en caso de rotura del cristal y una de purga (fig. 5.2).
El nivel de cristal normal (fig. 5.2 a) se emplea para presiones hasta 7 bar. A presiones más elevadas el cristal es grueso, de sección rectangular y está pro tegido por una armadura metálica (fig. 5.2 b). La lectura del nivel se efectúa con un cristal a reflexión o bien por transparencia. En el primer caso que puede verse en la figura 5.2 e, el vidrio en contacto con el líquido está provisto de ra nuras longitudinales que actúan como prismas de reflexión indicando la zona de líquido con un color oscuro casi negro y la zona superior en contacto con el va por de color claro.
.... nivel líquido
zona vapor
zona líquido
a - cristal normal
b - cristal con armadura
líquido o vapor
cristal
d - lectura por transparencia
Fig. 5.2 Nivel de cristal.
En la lectura por transparencia empleada para apreciar el color, característi cas o interfase del líquido, éste está contenido entre dos placas de vidrio planas y paralelas que permiten ver directamente el nivel, mejorándose la apreciación visual al acoplar una lámpara de iluminación al sistema.
Para mayor seguridad, las válvulas de cierre incorporan una pequeña bola que actúa como válvula de retención en caso de rotura del vidrio.
19 Instrumentación
Los niveles de vidrio son susceptibles de ensuciarse por las características del líquido que miden, impidiendo que el nivel pueda apreciarse claramente. En tre los líquidos que presentan este inconveniente figuran el caramelo y los líquidos pegajosos.
El nivel de vidrio permite sólo una indicación local, si bien pueden em plearse espejos para lectura a distancias limitadas o bien utilizar cámaras de tele visión para mayores distancias de transmisión.
Su ventaja principal es la gran seguridad que ofrece en la lectura del nivel del líquido pudiendo controlar con ellos la lectura de los otros tipos de aparatos de nivel.
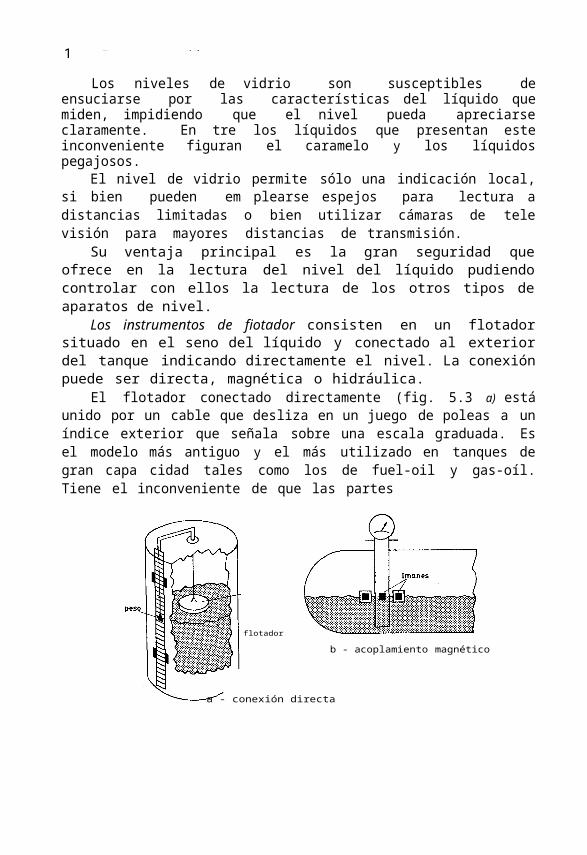
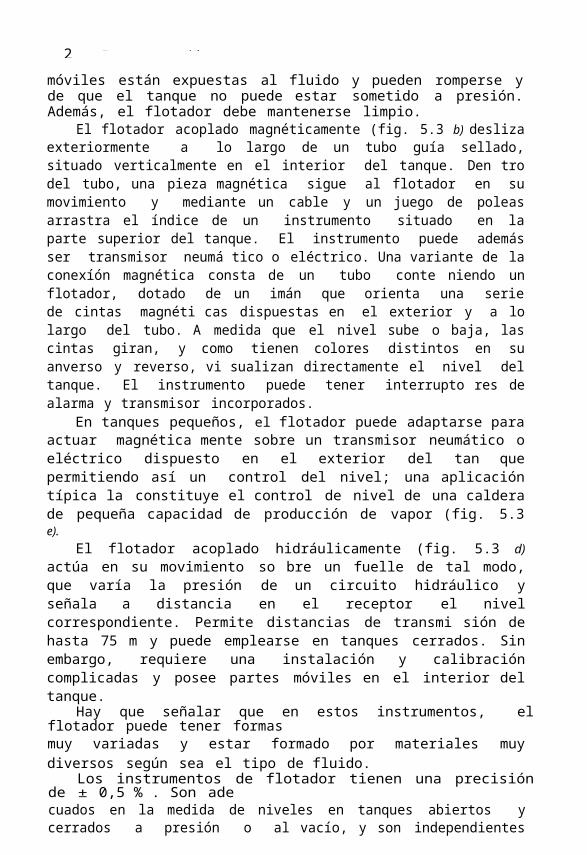
Los instrumentos de fiotador consisten en un flotador situado en el seno del líquido y conectado al exterior del tanque indicando directamente el nivel. La conexión puede ser directa, magnética o hidráulica.
El flotador conectado directamente (fig. 5.3 a) está unido por un cable que desliza en un juego de poleas a un índice exterior que señala sobre una escala graduada. Es el modelo más antiguo y el más utilizado en tanques de gran capa cidad tales como los de fuel-oil y gas-oíl. Tiene el inconveniente de que las partes
flotador
b - acoplamiento magnético
a - conexión directa
c - t ronsmisor
d - acoplamiento hidráulico
Fig. 5.3 Instrumento de flotador.

Medición de 1móviles están expuestas al fluido y pueden romperse y de que el tanque no puede estar sometido a presión. Además, el flotador debe mantenerse limpio.
El flotador acoplado magnéticamente (fig. 5.3 b) desliza exteriormente a lo largo de un tubo guía sellado, situado verticalmente en el interior del tanque. Den tro del tubo, una pieza magnética sigue al flotador en su movimiento y mediante un cable y un juego de poleas arrastra el índice de un instrumento situado en la parte superior del tanque. El instrumento puede además ser transmisor neumá tico o eléctrico. Una variante de la conexíón magnética consta de un tubo conte niendo un flotador, dotado de un imán que orienta una serie de cintas magnéti cas dispuestas en el exterior y a lo largo del tubo. A medida que el nivel sube o baja, las cintas giran, y como tienen colores distintos en su anverso y reverso, vi sualizan directamente el nivel del tanque. El instrumento puede tener interrupto res de alarma y transmisor incorporados.
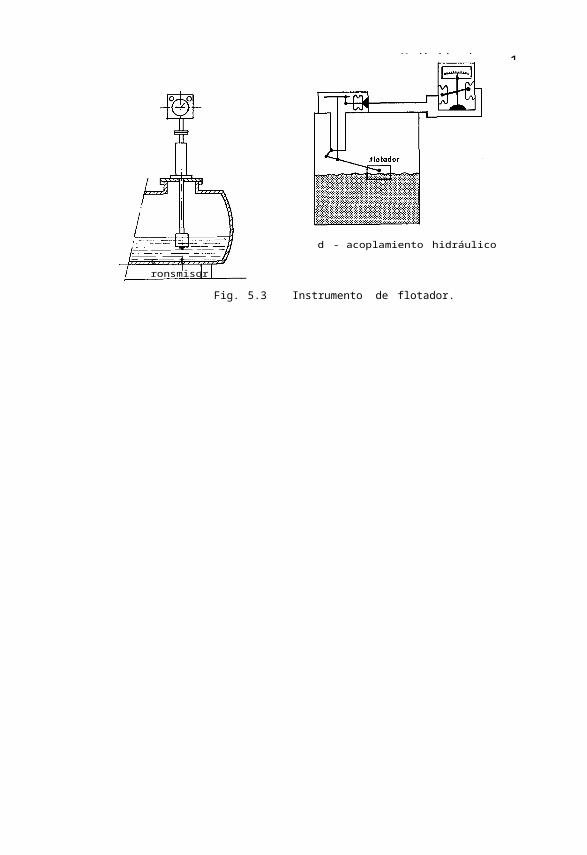
En tanques pequeños, el flotador puede adaptarse para actuar magnética mente sobre un transmisor neumático o eléctrico dispuesto en el exterior del tan que permitiendo así un control del nivel; una aplicación típica la constituye el control de nivel de una caldera de pequeña capacidad de producción de vapor (fig. 5.3 e).
El flotador acoplado hidráulicamente (fig. 5.3 d) actúa en su movimiento so bre un fuelle de tal modo, que varía la presión de un circuito hidráulico y señala a distancia en el receptor el nivel correspondiente. Permite distancias de transmi sión de hasta 75 m y puede emplearse en tanques cerrados. Sin embargo, requiere una instalación y calibración complicadas y posee partes móviles en el interior del tanque.
Hay que señalar que en estos instrumentos, el flotador puede tener formasmuy variadas y estar formado por materiales muy diversos según sea el tipo de fluido.
Los instrumentos de flotador tienen una precisión de ± 0,5 % . Son adecuados en la medida de niveles en tanques abiertos y cerrados a presión o al vacío, y son independientes del peso específico del líquido. Por otro lado, el flo tador puede agarrotarse en el tubo guía por un eventual depósito de los sólidos o cristales que el líquido pueda contener y además los tubos guía muy largos pueden dañarse ante olas bruscas en la superficie del líquido o ante la caída vio- lenta del líquido en el tanque. ·
5.1.2 Instrumentos basados en la pres1on hidrostática.Medidor manométrico. Membrana. Burbujeo. Presión diferencial
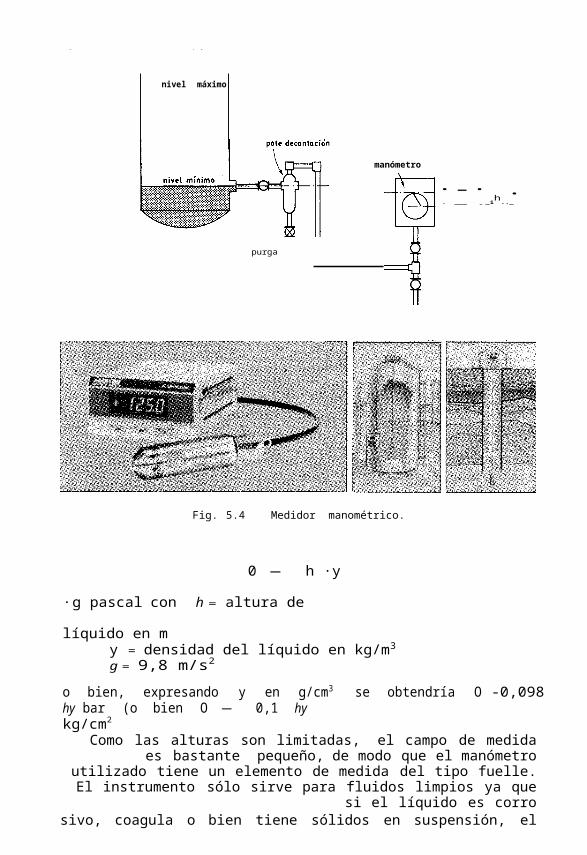
El medidor manométrico consiste en un manómetro conectado directamente a la parte inferior del tanque. En la figura 5.4 puede verse un instrumento de este tipo en el que se observarán varios accesorios como son una válvula de cierre para mantenimiento, y un pote de decantación con una válvula de purga. El manómetro mide la presión debida a la altura de líquido h que existe entre el nivel del tanque y el eje del instrumento. Así pues, el campo de medida del instrumento corresponderá a:
)
1 Instrumentación
nivel máximo
manómetro
·-· .. _ _ _i
h.._
purga
Fig. 5.4 Medidor manométrico.
0 - h ·y ·g
pascal con h = altura de líquido en my = densidad del líquido en kg/m3
g = 9,8 m/s2
o bien, expresando y en g/cm3 se obtendría O -0,098 hy bar (o bien O - 0,1 hykg/cm2
Como las alturas son limitadas, el campo de medida es bastante pequeño, de modo que el manómetro utilizado tiene un elemento de medida del tipo fuelle.
El instrumento sólo sirve para fluidos limpios ya que si el líquido es corrosivo, coagula o bien tiene sólidos en suspensión, el fuelle puede destruirse o bien bloquearse perdiendo su elasticidad; por otra parte, como el campo de medida es pequeño no es posible utilizar sellos de diafragma. La medida está limitada a tanques abiertos y el nivel viene influido por las variaciones de densidad del lí-
/
Medición de 1
quido. Una variante emplea un transductor de presión suspendido de la parte su perior del tanque e inmerso en el líquido, transmitiendo la señal de 4-20 mA e.e. a través de un cable que acompaña al de suspensión. La transmisión o indicación del nivel a través de una comunicación RS-232 permite conectar con la interfaz de un ordenador.
El medidor de membrana utiliza una membrana conectada con un tubo estanco al instrumento receptor.
La fuerza ejercida por la columna de líquido sobre el área de la membrana com prime el aire interno a una presión igual a la ejercida por la columna de líquido. El vo lumen del aire interno es relativamente grande, por lo cual el sistema está limitado a distancias no mayores de unos 15 m debido a la compresibilidad del aire. Como antes, la presión máxima que el líquido ejercerá es 0,098 hy bar. El instrumento es delicado ya que cualquier pequeña fuga del aire contenido en el diafragma destruiría la calibración del instrumento.
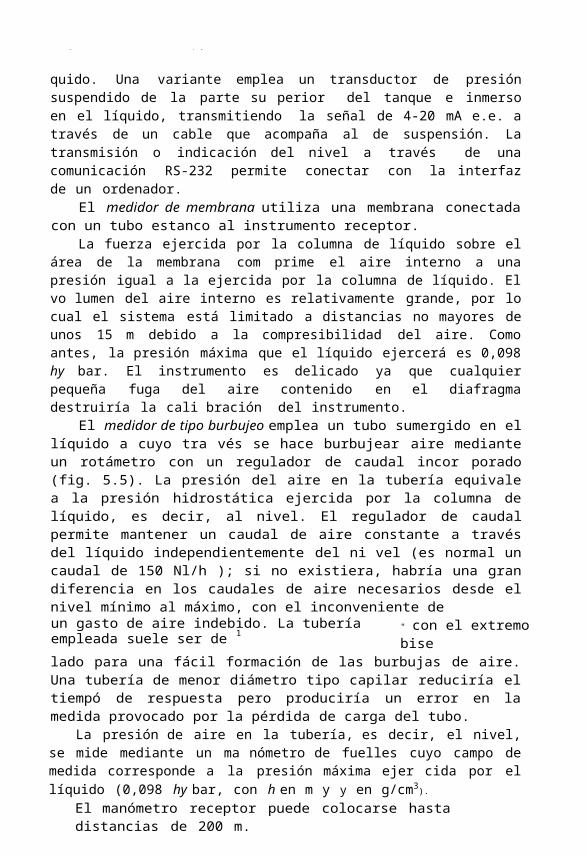
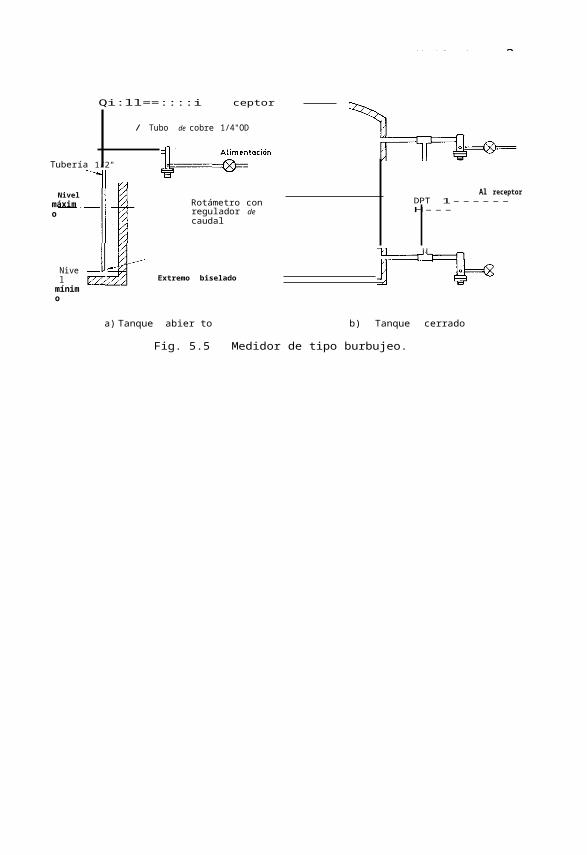
El medidor de tipo burbujeo emplea un tubo sumergido en el líquido a cuyo tra vés se hace burbujear aire mediante un rotámetro con un regulador de caudal incor porado (fig. 5.5). La presión del aire en la tubería equivale a la presión hidrostática ejercida por la columna de líquido, es decir, al nivel. El regulador de caudal permite mantener un caudal de aire constante a través del líquido independientemente del ni vel (es normal un caudal de 150 Nl/h ); si no existiera, habría una gran diferencia en los caudales de aire necesarios desde el nivel mínimo al máximo, con el inconveniente deun gasto de aire indebido. La tubería empleada suele ser de 1
" con el extremo biselado para una fácil formación de las burbujas de aire. Una tubería de menor diámetro tipo capilar reduciría el tiempó de respuesta pero produciría un error en la medida provocado por la pérdida de carga del tubo.
La presión de aire en la tubería, es decir, el nivel, se mide mediante un manómetro de fuelles cuyo campo de medida corresponde a la presión máxima ejer cida por el líquido (0,098 hy bar, con h en m y y en g/cm3).
El manómetro receptor puede colocarse hasta distancias de 200 m.
Qi:ll==::::i ceptor
/ Tubo de cobre 1/4"OD
Tubería 1/2"
Nivelmáximo Rotámetro con
regulador de caudal
Al receptorDPT 1------H---
Nivelmínimo Extremo biselado
a) Tanque abier to b) Tanque cerrado
Fig. 5.5 Medidor de tipo burbujeo.
2 Instrumentación
.
El sistema puede emplearse también en tanques cerrados (fig. 5.5 b) con dos jue gos rotámetro-regulador y con las señales de aire conectadas a un transmisor de pre sión diferencial análogo al estudiado en el capítulo 4 de Instrumentos de caudal. Como es lógico, la presión del aire de purga debe ser superior a la presión interna del tan que.
Señalemos que no sólo puede utilizarse aire sino también otros tipos de gases e incluso líquido como fluido de purga y que el tubo debe tener una longitud adecuada para evitar que las variaciones bruscas del nivel introduzcan en su in terior una cierta columna de líquido que retarde el paso del aire y falsee momen táneamente la lectura.
El método de burbujeo es simple y da buen resultado, en particular, en el caso de líquidos muy corrosivos o con sólidos en suspensión y en emulsiones. No se recomienda su empleo cuando el fluido de purga perjudica al líquido y para fluidos altamente viscosos donde las burbujas formadas del aire o del gas de purga presentan el riesgo de no separarse rápidamente del tubo. Desde el punto de vista de mantenimiento, es muy útil situar una T con un tapón en la parte superior de] tubo para su limpieza periódica.
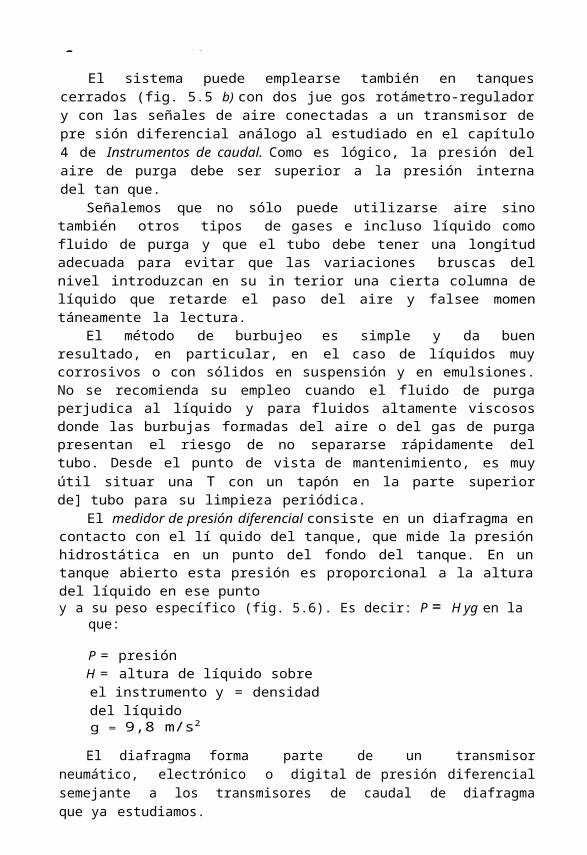
El medidor de presión diferencial consiste en un diafragma en contacto con el lí quido del tanque, que mide la presión hidrostática en un punto del fondo del tanque. En un tanque abierto esta presión es proporcional a la altura del líquido en ese puntoy a su peso específico (fig. 5.6). Es decir: P = H yg en la que:
P = presiónH = altura de líquido sobre el instrumento y = densidad del líquidog = 9,8 m/s2
El diafragma forma parte de un transmisor neumático, electrónico o digital de presión diferencial semejante a los transmisores de caudal de diafragma que ya estudiamos.
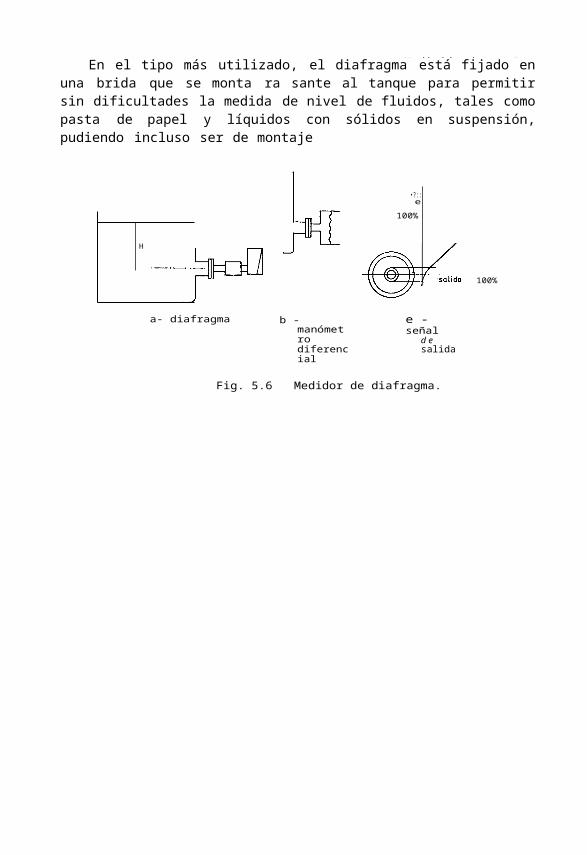
En el tipo más utilizado, el diafragma está fijado en una brida que se monta ra sante al tanque para permitir sin dificultades la medida de nivel de fluidos, tales como pasta de papel y líquidos con sólidos en suspensión, pudiendo incluso ser de montaje
H
a- diafragma b - manómetro diferencial
•?::e
100%
e - señald e salida
100%
Fig. 5.6 Medidor de diafragma.
Medición de 2
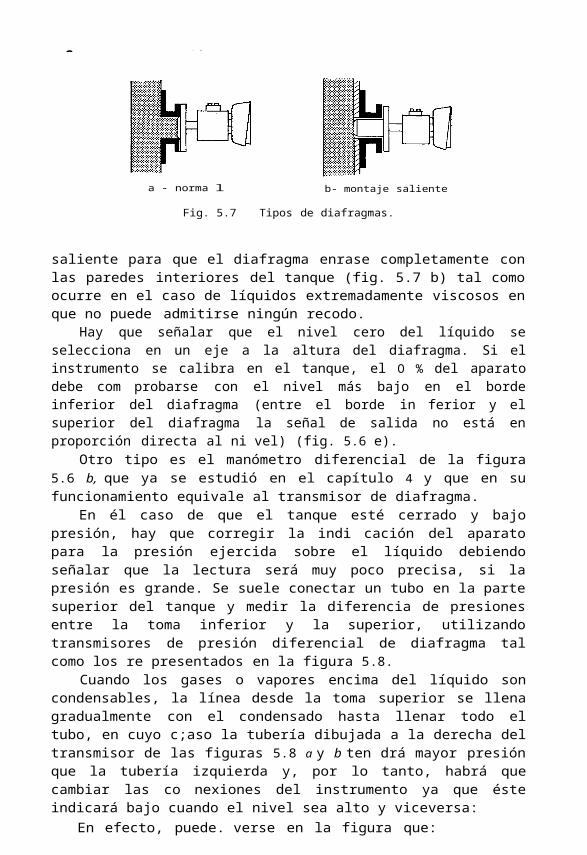
a - norma l b- montaje saliente
Fig. 5.7 Tipos de diafragmas.
saliente para que el diafragma enrase completamente con las paredes interiores del tanque (fig. 5.7 b) tal como ocurre en el caso de líquidos extremadamente viscosos en que no puede admitirse ningún recodo.
Hay que señalar que el nivel cero del líquido se selecciona en un eje a la altura del diafragma. Si el instrumento se calibra en el tanque, el O % del aparato debe com probarse con el nivel más bajo en el borde inferior del diafragma (entre el borde in ferior y el superior del diafragma la señal de salida no está en proporción directa al ni vel) (fig. 5.6 e).
Otro tipo es el manómetro diferencial de la figura 5.6 b, que ya se estudió en el capítulo 4 y que en su funcionamiento equivale al transmisor de diafragma.
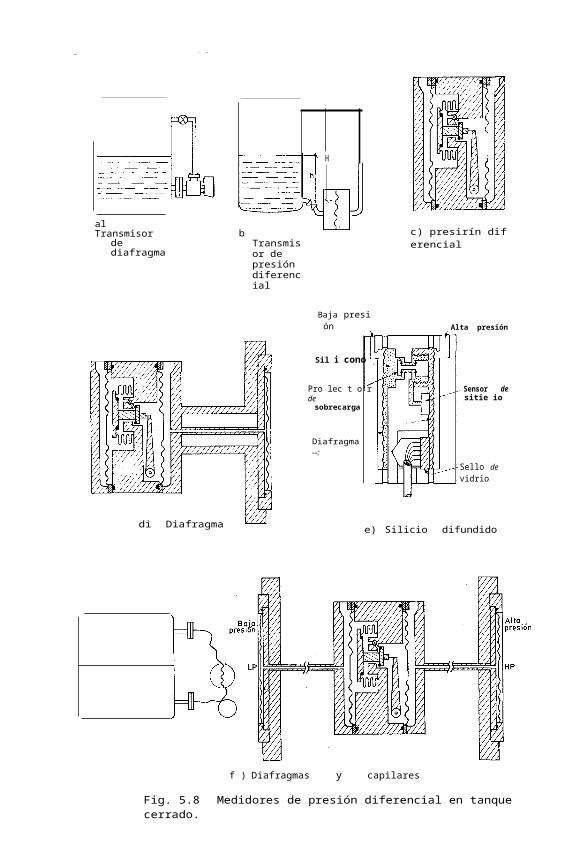
En él caso de que el tanque esté cerrado y bajo presión, hay que corregir la indi cación del aparato para la presión ejercida sobre el líquido debiendo señalar que la lectura será muy poco precisa, si la presión es grande. Se suele conectar un tubo en la parte superior del tanque y medir la diferencia de presiones entre la toma inferior y la superior, utilizando transmisores de presión diferencial de diafragma tal como los re presentados en la figura 5.8.
Cuando los gases o vapores encima del líquido son condensables, la línea desde la toma superior se llena gradualmente con el condensado hasta llenar todo el tubo, en cuyo c;aso la tubería dibujada a la derecha del transmisor de las figuras 5.8 a y b ten drá mayor presión que la tubería izquierda y, por lo tanto, habrá que cambiar las co nexiones del instrumento ya que éste indicará bajo cuando el nivel sea alto y viceversa:
En efecto, puede. verse en la figura que:
P = (H - h)y para h = O
De este modo, el instrumento tendrá que estar graduado a la inversa, es de cir, indicar O % a 3 psi y 100 % a 15 psi en un transmisor neumático, o bien se ñalar O % a 4 mA y 100 % a 20 mA en un transductor de señal de salida 4-20 miliamperios en corriente continua.
Para corregir este inconveniente se utiliza un muelle llamado de supresión que está aplicado a la barra de equilibrio de fuerzas del transmisor y que pro duce una fuerza igual a la diferencia entre el nivel máximo y el mínimo. Como es natural, puede ajustarse la tensión del muelle para cada caso particular (figu ras 5.9 a y b).
Algunos fluidos presentan el riesgo de depósito de cristales o de sólidos en
2 Instrumentación
H
al Transmisorde diafragma b Transmisor
de presión diferencial
Baja presi ón
Sil i cono
Pro lec t o r desobrecarga
Diafragma --:
c) presirín dif erencial
Alta presión
Sensor desitie io
Sello de vidrio
di Diafragmae) Silicio difundido
f ) Diafragmas y capilares
Fig. 5.8 Medidores de presión diferencial en tanque cerrado.
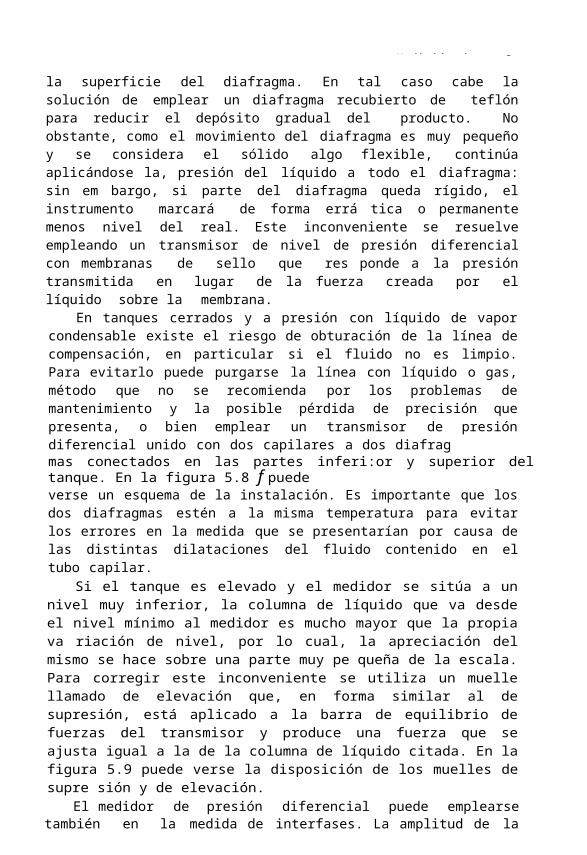
Medición de 20la superficie del diafragma. En tal caso cabe la solución de emplear un diafragma recubierto de teflón para reducir el depósito gradual del producto. No obstante, como el movimiento del diafragma es muy pequeño y se considera el sólido algo flexible, continúa aplicándose la, presión del líquido a todo el diafragma: sin embargo, si parte del diafragma queda rígido, el instrumento marcará de forma errá tica o permanente menos nivel del real. Este inconveniente se resuelve empleando un transmisor de nivel de presión diferencial con membranas de sello que res ponde a la presión transmitida en lugar de la fuerza creada por el líquido sobre la membrana.
En tanques cerrados y a presión con líquido de vapor condensable existe el riesgo de obturación de la línea de compensación, en particular si el fluido no es limpio. Para evitarlo puede purgarse la línea con líquido o gas, método que no se recomienda por los problemas de mantenimiento y la posible pérdida de precisión que presenta, o bien emplear un transmisor de presión diferencial unido con dos capilares a dos diafragmas conectados en las partes inferi:or y superior del tanque. En la figura 5.8 f puedeverse un esquema de la instalación. Es importante que los dos diafragmas estén a la misma temperatura para evitar los errores en la medida que se presentarían por causa de las distintas dilataciones del fluido contenido en el tubo capilar.
Si el tanque es elevado y el medidor se sitúa a un nivel muy inferior, la columna de líquido que va desde el nivel mínimo al medidor es mucho mayor que la propia va riación de nivel, por lo cual, la apreciación del mismo se hace sobre una parte muy pe queña de la escala. Para corregir este inconveniente se utiliza un muelle llamado de elevación que, en forma similar al de supresión, está aplicado a la barra de equilibrio de fuerzas del transmisor y produce una fuerza que se ajusta igual a la de la columna de líquido citada. En la figura 5.9 puede verse la disposición de los muelles de supre sión y de elevación.
El medidor de presión diferencial puede emplearse también en la medida de interfases. La amplitud de la medida vendrá dada por la diferencia de presio nes sobre el diafragma del elemento, primero con el tanque lleno del líquido más denso y después con el líquido menos denso. Por ejemplo, si la interfase es agua keroseno (y = 0,8) y el tanque tiene 3 m de altura, la presión diferencial dispo nible será de:
0,098 X 3 X 1- 0,098 x 3 X 0,8 = 0,0588 bar = 600 mm c. de a.
que puede medirse fácilmente con un transmisor de presión diferencial sensible dotado de resorte de elevación para compensar la presión inicial del líquido me nos denso.
La precisión de los instrumentos de presión diferencial es de ± 0,5 % enlos neumáticos, ± 0,2 % a ± 0,3 % en los electrónics, y de ± 0,15 % en los «inteligentes» con señal de salida de 4-20 mA e.e. y de ± 0,1 % en los quese emplean en los tanques abiertos y cerrados a presión y a vacío, no tienen partes móviles dentro del tanque, son de fácil limpieza, son precisos y confiables, admi ten temperaturas del fluido hasta 120° e y no son influidos por las fluctuaciones de presión. Sin embargo, en tanques cerrados presentan el inconveniente de la posible condensación de los vapores del tanque en el tubo de conexión al instru-
2 Instrumentación
b - supr e sión
a - en transmisores
con muelle sin muelle
e - elevación
Fig. 5.9 Muelles de supresión y de elevación.
mento; este inconveniente se elimina fácilmente con el resorte de supresión des crito. Hay que señalar que el material del diafragma debe ser el adecuado para resistir la corrosión del fluido (existen materiales de acero inoxidable 316, monel, tantalio, hastelloy B, inoxidable recubierto de tefión).
Los instrumentos basados en la presión hidrostática permiten inventariar el tan que. En la figura 5.10 puede verse el montaje de los instrumentos, tres transmi sores de presión situados en las partes inferior, media y superior del tanque, y una sonda de temperatura. Las medidas calculadas son:
P;n¡- p media
Densidad = ------
''
Medición de 20P¡ - Ps
Nivel = ----+ h¡Densidad
Masa = ( P¡ - P,) X Área media del tanque
Masa Volumen = -----
Densidad
La temperatura media tomada entre la parte inferior y la media del tanque per mite corregir la densidad y el volumen calculados.
Otros factores que influyen son la configuración del tanque, los asentamientos del tanque en el terreno, las expansiones térmicas y las variaciones de densidad en las capas del líquido. La precisión en la medida de la masa llega al ± 0,01% .
1-- - - -
1
--...,1
1_ _ J
h ----'
/ '
Fig. 5.10 Inventariado de un tanque.
5.1.3 Instrumento basado en el desplazamiento
El medidor de nivel de tipo desplazamiento (fig. 5.11) consiste en un flotador par cialmente sumergido en el líquido y conectado mediante un brazo a un tubo de torsión unido rígidamente al tanque. Dentro del tubo y unido a su extremo libre se encuentra una varilla que transmite el movimiento de giro a un transmisor ex terior al tanque.
El tubo de torsión se caracteriza fundamentalmente porque el ángulo de rotación de su extremo libre es directamente proporcional a la fuerza aplicada, es decir, al momento ejercido por el flotador. El movimiento angular del extremo libre del tubo de torsión es muy pequeño, del orden de los 9°. El tubo proporcio na además un cierre estanco entre el flotador y el exterior del tanque (donde se dispone el instrumento receptor del par transmitido).
Según el principio de Arquímedes, el flotador sufre un empuje hacia arriba que viene dado por la fórmula
F = S H yg
1
2 Instrumentación
en la que:
F = empuje del líquidoS = sección del flotador
H = altura sumergida del flotador y = densidad del líquidog = 9,8 m/s2
y el momento sobre la barra de torsión es
M = (SH yg - P)l
siendo l el brazo del tubo de torsión y P el peso del flotador.Tal como puede verse en la expresión anterior, al aumentar el nivel, el
líquido ejerce un empuje sobre el flotador igual al volumen de la parte sumer gida multiplicada por la densidad del líquido, tendiendo a neutralizar su peso propio, así que el esfuerzo medido por el tubo de torsión será muy pequeño. Por
palanca1
1
:-flotador1
\ ... ,,I
montaje externo
H 'l r Y2 1- x
p
Y1 X
ss
interfase montaje interno
Fig. 5.11 Medidor de nivel de desplazamiento.
Medición de 20el contrario, al bajar el nivel, menor parte del flotador queda sumergida, y la fuerza de empuje hacia arriba disminuye, resultando una mayor torsión.
El instrumento puede utilizarse tampién en la medida de interfase entre dos líquidos inmiscibles de distinta densidad (por ejemplo, agua y aceite). En este caso el flotador es de pequeño diámetro y de gran longitud y está totalmente su mergido. El peso del volumen desplazado por el flotador, es decir, el empuje, se compone entonces de dos partes, del líquido más denso en la parte inferior y del menos denso en la superior, con una línea de separación (interfase) de la que depende el par de torsión proporcionado al transmisor exterior. En efecto, si x es la zona del flotador inmersa en el líquido de mayor densidad, l es la longitud total del flotador y y 1, y2 son las densidades de los líquidos, resulta:
Empuje hacia arriba = F = Sx · y 1 · g + S ( l - x ) ·Y2 ·g
Se ve claramente que este empuje depende del nivel relativo de separación de los dos líquidos y que la amplitud de medida está determinada por la diferen cia entre las densidades de los líquidos, es decir
Fmax -Fmin = Sl-11 . g - Slyz . g = SI (Y1 -Y2) . g
Las dimensiones relativas del flotador (longitud y diámetro) dependerán pues de la amplitud de medida seleccioncida.
El instrumento sirve también para medir la densidad del líquido. En este caso, el flotador está totalmente sumergido. El campo de medida de densidades es bas tante amplio, de 0,4 a 1,6.
El cuerpo del medidor puede estar montado directamente en el tanque (montaje interno) o en un tubo vertical al lado del tanque (montaje exterioL}.
El movimiento del brazo de torsión puede transmitirse por medio de un eslabón a un transmisor neumático o electrónico de equilibrio de fuerzas, o digital (sensor de efecto Hall en el que al estar una placa o cinta de conductor o semiconductor reco rrida por una corriente, dentro de un campo magnético perpendicular, se genera una
f.e.m. perpendicular a la vez a la intensidad de la corriente y al flujo del campo mag nético), permitiendo en la conexión una compensación mecánica o digital para
el peso específico del líquido. En la figura 5.11se representa un esquema del funcionamientq.
La precisión es del orden de ± 0,5 % a ± 1% y el intervalo de medidapuede variar de 0-300 a O-2000 mm c. de a.
El instrumento puede utilizarse en tanques abiertos y cerrados a presión o a vacío, tiene una buena sensibilidad pero presenta el inconveniente del riesgo de depósito de sólidos o de crecimiento de cristales en el flotador que afectan a la precisión de la medida y es apto sólo para la medida de pequeñas diferencias de nivel (2000 mm máximo estándar). La medida del nivel de interfases requiere flotadores de gran volumen.
5.1.4 Instrumentos basados en características eléctricas del líquido
El medidor de nivel conductivo o resistivo (fig. 5.12) consiste en uno o varios electrodos y un relé eléctrico o electrónico que es excitado cuando el líquido
:
2 Instrumentación
220 V 50 Hz
El•ctrodo
220VSO Hz
Electrodoinferior
-.[:IQ.UlQQ_ CQt!_QU_nQ R
-· -- -- -a - lí quido conductor b - 1 íquido poco conductor
i_ _ _ _ _ _ _ _
Mo torinversor - - - Instrumtnto
registrador
' - - - '----1 11 1
e - nivel de vidrio
- - - - - - - - - - - -- --- - 'V en fusión
Fig. 5.12 Medidor de nivel conductivo.
moja a dichos electrodos. El líquido debe ser lo suficientemente conductor como para excitar el circuito electrónico, y de este modo el aparato puede discriminar la separación entre el líquido y su vapor, tal como ocurre, por ejemplo, en el ni vel de agua de una caldera de vapor. La impedancia mínima es del orden de los20 MQ/ cm, y la tensión de alimentación es alterna para evitar fenómenos de oxidación en las sondas por causa del fenómeno de la electrólisis. Cuando el líquido moja los electrodos se cierra el circuito electrónico y circula una corriente segura del orden de los 2 mA; el relé electrónico dispone de un temporizador de retardo que impide su enclavamiento ante una ola del nivel del líquido o ante cualquier perturbación momentánea o bien en su lugar se disponen dos electro dos poco separados enclavados eléctricamente en el circuito.
El instrumento se emplea como alarma o control de nivel alto y bajo, utiliza relés eléctricos para líquidos con buena conductividad y relés electrónicos para líquidos con baja conductividad. Montado en grupos verticales de 24 o más elec trodos, puede complementar los típicos niveles de vidrio de las calderas, y se presta a la transmisión del nivel a la sala de control y a la adición de las alarmas correspondientes.
Una variante del aparato se utiliza en el control del nivel de vidrio en fusión (fig. 5.12 e): Un sistema electromecánico baja el electrodo hasta que éste en tra en contacto con la superficie del vidrio fundido que a las temperaturas de fusión es conductor. El circuito está proyectado de tal forma que en el momento del contacto, el electrodo queda parado y su posición marcada en un registrador; instantes después invierte su movimiento hasta romper el contacto eléctrico y se repite nuevamente el ciclo.
Medición de 2El instrumento es versátil, sin partes móviles, su campo de medida es grande
con la limitación física de la longitud de los electrodos. El líquido contenido en el tanque debe tener un mínimo de conductividad y si su naturaleza lo exige, la corriente debe ser baja para evitar la deterioración del producto. Por otro lado, conviene que la sensibilidad del aparato sea ajustable para detectar la presencia de espuma en caso necesario.
El medidor de capacidad (fig. 5.13) mide la capacidad del condensador for mado por el electrodo sumergido en el líquido y las paredes del tanque. La capacidad del conjunto depende linealmente del nivel del líquido.
En fluidos no conductores se emplea un electrodo normal (fig. 5.13 a) y la capacidad total del sistema se compone de la del líquido, la del gas superior y la de las conexiones superiores.
En fluidos conductores (fig. 5.13 b) con una conductividad mínima de 100 microhmios/ e.e. el electrodo está aislado usualmente con teflón interviniendo las capacidades adicionales entre el material aislante y el electrodo en la zona del líquido y del gas.
El circuito 1 electrónico (puente de capacidades, fig. 5.13 e) alimenta el elec trodo a una frecuencia elevada, lo cual disminuye la reactancia capacitiva del con junto y permite aliviar en parte el inc'Unveniente del posible recubrimiento del electrodo por el producto.
a - f luido no conductor b - f luido conductor
R = ResiStencia f ija
Ct ' Capa,cidad f i ja.. C ' Capacidad variable
c - puente de capacidades
Fig. 5.13 Medidor de capacidad.
•II
-
2 Instrumentación
El sistema es sencillo y apto para muchas clases de líquidos. Sin embargo, hay que señalar que en los fluidos conductores, los sólidos o líquidos conduc tores que se encuentran en suspensión o emulsión, y las burbujas de aire o de vapor existentes, aumentan y disminuyen respectivamente la constante dieléctrica del fluido dando lugar a un error máximo de 3 % por cada tanto por ciento de desplazamiento volumétrico. Por otro lado, al bajar el nivel, la porción aislante del · electrodo puede quedar recubierta de líquido y la capacidad adicional que ello representa da lugar a un error considerable.
La precisión de los transductores de capacidad es de ± 1 % .Se caracterizan por no tener partes móviles, son ligeros, presentan una buena
re sistencia a la corrosión y son de fácil limpieza. Su campo de medida es prácticamente ilimitado y pueden emplearse en la medida de nivel de interfases. Tienen el inconve niente de que la temperatura puede afectar las constantes dieléctricas (0,1 % de aumento de la constante dieléctrica/ºC) y de que los posibles contaminantes conteni dos en el líquido pueden adherirse al electrodo variando su capacidad y falseando la lectura, en particular en el caso de líquidos conductores. El funcionamiento del sis tema, a una frecuencia elevada, o bien la incorporación de un circuito detector de fase, compensan en parte este inconveniente.
El sistema ultrasónico de medición de nivel (fig. 5.14) se basa en la emisión de un impulso ultrasónico a una superficie reflectante y la recepción del eco del mismo en un receptor. El retardo en la captación del eco depende del nivel del tanque.
Los sensores trabajan a una frecuencia de unos 20 kHz. Estas ondas atraviesan con cierto amortiguamiento o reflexión el medio ambiente de gases o va pores y se reflejan en la superficie del sólido o del líquido.
En la figura 5.14 pueden verse varias disposiciones de montaje de los detectores que se utilizan en los casos de alarmas o de indicación continua del nivel.
En las aplicaciones de alarma de nivel los sensores vibran a una frecuencia de resonancia determinada, que se amortigua cuando el líquido los moja.
iM onta je superior
------
Mont
;aje
1lateral
- --c:_-/t_
=--J -1- -=
---f-"----'--
-r:: ---=
alar ma en aire en líquido indicación continua
Medición de 2
Fig._ 5.14 Transductor ultrasónico de nivel.
2 Instrumentación
En el segundo caso de indicación continua del nivel, la fuente ultrasónica genera impulsos que son detectados por el receptor una vez ha transcurrido el tiempo correspondiente de ida y vuelta de la onda a la superficie del sólido o del líquido.
En la figura 5.15 puede verse el diagrama de bloques de un sistema de me dida de ultrasonidos. El sensor emisor dispone de un oscilador excitador para enviar un impulso ultrasónico a la superficie del fluido y el sensor receptor reci be esta señal reflejada enviando una señal función del tiempo transcurrido, y por lo tanto del nivel, a un oscilógrafo o a un indicador.
RECEPTOR t-----,
COMPUTADOR LEC TURA
TRANSMISOR t----'
Fig. 5.15 Diagrama de bloques de un transductor.
La precisión de estos instrumentos es de -+- 1 a 3 % . Son adecuados para todos los tipos de tanques y de líquidos o fangos pudiendo construirse a prueba de explosión. Presentan el inconveniente de ser sensibles a la densidad de los flui dos y de dar señales erróneas cuando la superficie del nivel del líquido no es ní tida como es el caso de un líquido que forme espuma, ya que se producen falsos ecos de los ultrasonidos.
La utilización del ordenador permite, a través de un programa, almacenar el perfil ultrasónico del nivel, y así tener en cuenta las características particulares dela superficie del líquido, tal como la espuma, con lo cual se mejora la precisión de la medida. Por otro lado, el ordenador facilita la conversión del nivel a volu men del tanque para usos de inventario, y además proporciona características de autocomprobación («self-checking») del instrumento.
El sistema de radar de microondas emplea la propagación de una onda electro magnética que no es influida por la temperatura ni por las variaciones de densidad que puedan existir sobre el líquido. De este modo, la espuma, que es transparente a la se ñal de radar, deja de ser un problema como ocurría en el medidor de ultrasonidos. Un oscilador de estado sólido genera una frecuencia de barrido de 10 a 11 GHz y enfoca la señal sobre el líquido por medio de una antena. La diferencia de frecuencias entre las señales de transmisión y de retorno es proporcional al tiempo empleado por las mismas. Y así:
Vd = --
2 dt
21 Instrumentación
-=---::::: --=s:::- _-
econ v = --
{;
siendo:
d = distancia del emisor al líquidov = señal de velocidaddt = tiempo de recorridoe = velocidad de la luze = constante dieléctrica
Como la constante dieléctrica de los vapores sobre el líquido es casi la unidad, la variación de la velocidad es despreciable, de modo que la señal de velocidad de radar es más constante que la de ultrasonidos.
El sistema de medición por rayos gamma (fig. 5.16) consiste en un emisor de rayos gamma montado verticalmente en un lado del tanque y con un contador Geiger que transforma la radiación gamma recibida en una señal eléctrica de corriente continua. Como la transmisión de los rayos es inversamente proporcio nal a la masa del líquido en el tanque, la radiación captada por el receptor es inversamente proporcional al nivel del líquido ya que el material absorbe parte de la energía emitida.
Los rayos emitidos por la fuente son similares a los rayos X, pero de longitud de onda más corta. La fuente radiactiva pierde igualmente su radiactividad en fiµición exponencial del tiempo. La vida media (es decir, el tiempo necesario para que el emisor pierda la mitad de su actividad) varía según la fuente em pleada. En el cobalto 60 es de 5,5 años y en el cesio 137 es de 33 años y en el americio 241 es de 458 años.
Las paredes del tanque absorben parte de la radiación y al detector llega sólo un pequeño porcentaje. Los detectores son, en general, tubos Geiger o detectores de cá mara iónica y utilizan amplificadores de e.e. o de e.a. El instrumento dispone de com pensación de temperatura, de linealización de la señal de salida, y de reajuste de la pérdida de actividad de la fuente de radiación, extremo este último a tener en cuenta para conservar la misma precisión de la puesta en marcha. Como desventajas en su aplicación figuran el blindaje de la fuente y el cumplimiento de las leyes sobre pro tección de radiación, que en nuestro país están reglamentadas por la Junta de Ener gía Nuclear.
_....._ _ - - -.._ ----=:....... -- -- -
- _,_........
----- --
Fig. 5.16 Medidor de nivel radiactivo.
L
Medición de nivel
La precisión en la medida es de ± 0,5 a ± 2 % , y el instrumento puede emplearse para todo tipo de líquidos ya que no está en contacto con el proceso. Su lectura viene influida por el aire o por los gases disueltos en el líquido.
El sistema se emplea en caso de medida de nivel en tanques de acceso di fícil o peligroso. Es ventajoso cuando existen presiones elevadas en el interior del tanque que impiden el empleo de otros sistemas de medición. Hay que señalar que el sistema es caro y que la instalación no debe ofrecer peligro alguno de contaminación radiactiva siendo necesario señalar debidamente las áreas donde están instalados los instrumentos y realizar inspecciones periódicas de seguridad.
Fuente de luz Fotodetectador dealto resolución
1Distancia deseparación
777777,
Fig. 5.17 Medidor de nivel láser.
En aplicaciones donde las condiciones son muy duras, y donde los instrumentos de nivel convencionales fallan, encuentra su aplicación el medidor de láser (y también el de radiación). Tal es el caso de la medición de metal fundido, donde la medida del nivel debe realizarse sin contacto con el líquido y a la ma yor distancia posible por existir unas condiciones de calor extremas. El sistema consiste en un rayo láser enviado a través de un tubo de acero y dirigido por re flexión en un espejo sobre la superficie del metal fundido. El aparato mide el tiempo que transcurre entre el impulso emitido y el impulso de retorno que es registrado en un fotodetector de alta resolución, y este tiempo es directamente proporcional a la distancia del aparato emisor a la superficie del metal fundido. Un microprocesador convierte este tiempo al valor de la distancia a la superficie del metal en fusión, es decir, da la lectura del nivel.
En la tabla 5.1 figura una comparación entre los tipos estudiados de me dición de nivel.
5.2 Medidores de nivel de sólidos
En los procesos continuos, la industria ha ido exigiendo el desarrollo de instru mentos capaces de medir el nivel de sólidos en puntos fijos o de forma continua,
21 Instrumentación
TABLA 5.1 Medidores de nivel de líquidos
Instrumento
Campo de
medidaPrecisión% escala
Pres. máx bar
Temp. máx. fluido
º C Desventajas Ventajas
Sonda
Cristal Flotador
Manométrico
Membrana Burbujeo
Presióndiferencial
Desplaza- miento
Conductivo Capacitivo
Ultrasónico
Radar
Radiación
Láser
Limit.
))
0-lO m
Alt. tanque
0-25 mAlt. tanque
0,3 m
0-25 m
Ilimitado 0,6 m
0,30 m
0-30 m
0-2,5 m
0-2 m
0,5 mm
))
± 1-2 %
± 1 %
± 1 %± 1 %
± 0,15 % a± 0,5 %
± 0,5 %
-± 1 %
± 1%
± 2,5 mm
± 0,5-2 %
± 0,5-2 %
Atm.
150400
Atm.
))
400
150
100
8080-250
400
-
-
60
200250
60
60200
200
170
200200-400
200
150
1500
Manual, sin olas. Tanques abier- tos
Sin transmisión Posible agarrota-
miento Tanques abiertos,
fluidos limpios Tanques abiertos Mantenimiento,
contaminación líquido
Posible agarrota- miento
Expuesto a corro- sión
Líquido conductor Recubrimiento
electrodo Sensible a densi-
dadSensible a la
cons- tante dieléctrica
Fuente radiactiva
Láser
Barato, preciso
Seguro, preciso Simple, indep. natu-
raleza líq. Barato
BaratoBaranto, versátil
Interfase líquido
Fácil limpieza, ro-busto, interfases
Versátil Resistencia, corro-
siónTodo tipo tanques
y líquidos» y líquidos con
espuma» y sin contacto
líquido» y sin contacto
líquido
en particular en los tanques o silos destinados a contener materias primas o pro ductos finales.
Los detectores de nivel de punto fijo proporcionan una medida en uno o varios puntos fijos determinados. Los sistemas más empleados son el diafragma, el cono suspendido, la varilla flexible, el medidor conductivo, las paletas rotativas y los ultrasonidos.
Los medidores de nivel continuo proporcionan una medida continua del nivel desde el punto más bajo al más alto. Entre los instrumentos empleados se encuentran el de peso móvil, el de báscula, el capacitivo, el de presión diferencfal, el de ultrasonidos y el de radiación.
52.1 Detectores de nivel de punto fijo
El detector de diafragma (fig. 5.18) consiste en una membrana flexible que puede entrar en contacto con el producto dentro del tanque y que contiene en su inte rior un conjunto de palancas con contrapeso que se apoyan sobre un microrrup tor. Cuando el nivel del sólido alcanza el diafragma lo fuerza venciendo el con trapeso y actuando sobre el microrruptor; éste que puede ser mecánico o de
Medición de 2
Fig. 5.18 Medidor de diafragma.
Tanqu e
interruptor
mercurio, puede accionar una alarma o actuar automáticamente sobre un trans portador o maquinaria asociadas al depósito.
El material del diafragma puede ser de tela, goma, neopreno o fibra de vidrío. El medidor de diafragma tiene la ventaja de su bajo coste, puede emplearse en tanques cerrados sometidos a baja presión o vacío gracias a una línea neumática que iguala presiones a ambos lados de la membrana y trabaja bien con materia- les de muy diversa densidad. ·
Tiene la desventaja de no admitir materiales granulares de tamaños supe riores a unos 80 mm de diámetro.
Su precisión es de unos + 50 mm.El cono suspendido (fig. 5.19) consiste en un microrruptor montado dentro
de una caja estanca al polvo, con una cazoleta de goma de la que está suspen dida una varilla que termina en un cono. Cuando el nivel de sólidos alcanza el cono, el interruptor es excitado. La cazoleta de goma permite una flexibilidad en la posición del cono gracias a la cual el aparato puede actuar como alarma de alto o de bajo nivel; conviene tener la precaución de proteger mecánicamente el instrumento cuando se manejan materiales pesados que, en su caída desde la boca de descarga del tanque podrían dañarlo.
El aparato es barato, necesita estar protegido como nivel de baja o en niveles intermedios y se utiliza sólo en tanques abiertos. Su precisión es de unos 50 mm. Sus aplicaciones típicas son la alarma y el cQntrol de nivel en carbón, granos y caliza.
La varilla flexible (fig. 5.20) consiste en una varilla de acero conectada a un diafragma de latón donde está contenido un interruptor. Cuando los sólidos pre sionan, aunque sólo sea ligeramente en la varilla, el interruptor se cierra y actúa sobre una alarma.
2 Instrumentación
- -+-- ---t-" i nterr uptor
cabezal de goma
_ _ i n t err u pt or
1 11 1
-so n da
co no
Fig. 5.19 Medidor de cono suspendido. Fig. 520 Varilla flexible.
El conjunto de la unidad está sellado herméticamente pudiendo construirse a prueba de explosión. El aparato se emplea como alarma de alto nivel estando dispuesto en la parte superior del tanque. Para impedir que la simple caída del producto pueda causar una alarma infundada, incorpora un relé de retardo.
El instrumentó se emplea en tanques abiertos como alarma de nivel alto, tiene una precisión de ± 25 mm, se utiliza para materiales tales como carbón y puede trabajar hasta temperaturas máximas de 300° C.
El medidor conductivo (fig. 5.21) consiste en un electrodo dispuesto en el interior de unas placas puestas a masa y con el circuito eléctrico abierto. Cuando los sólidos alcanzan el aparato se cierra el circuito y la pequeña corriente origi nada es amplificada actuando sobre un relé de alarma. Los sólidos deben poseer una conductividad eléctrica apreciable para poder excitar el circuito.
\''"'" o ''"'"
Fig. 521 Unidad de contacto eléctrico.
El instrumento puede utilizarse en tanques abiertos y a pres1on, trabaja hasta temperaturas máximas de 300° e, está limitado a materiales que tengan unaconductividad de 1 a 1,4 X 10-7 mho y sólo puede emplearse como alarma de nivel alto o de niveles intermedios. Entre los materiales en los que se pueden emplear figuran el carbón y el carbón activo. El medidor capacitivo es un detec tor de proximidad capacitivo, dotado de un circuito oscilante RC, que está ajus-
M o tor
17777
)Y Z Z Z
)
1
i
Medición de 2tado en un punto crítico, y que entra en oscilación cuando se encuentra próximo al lecho del sólido. El aparato se monta en el tanque en posición vertical o incli nada y su sensibilidad se coloca al mínimo para evitar el riesgo de excitación del aparato en el caso de que una mínima cantidad del sólido pueda depositarse en el detector.
Las paletas rotativas (fig. 5.22) consisten en un eje vertical, dotado de pale tas, que gira continuamente a baja velocidad accionado por un motor síncrono. Cuando el producto sólido llega hasta las paletas, las inmoviliza, con lo que el soporte del motor y la caja de engranajes empiezan a girar en sentido contrario.En su giro, el soporte del motor actúa consecutivamente sobre dos interruptores, el primero excita el equipo de protección (por ejemplo, una alarma) y el segundo desconecta la alimentación eléctrica del motor con lo cual ,éste queda bloqueado. Cuando el producto baja de nivel y deja las palas al descubierto, un resorte vuel ve el motor a su posición inicial liberando los dos microrruptores. De este modo, el motor se excita con lo que las palas vuelven a girar, y la alarma queda des conectada.
El eje de las palas puede ser flexible o rígido para adaptarse así a las diver sas condiciones de trabajo dentro del silo (caída de producto, deslizamientos del producto, etc.). Estos aparatos son adecuados en tanques abiertos o a baja pre sión (máximo 10 kg/cm2
, tienen una precisión de unos 25 mm y se emplean pre ferentemente como detectores de nivel de materiales granulares y carbón. Pueden trabajar con materiales de muy diversa densidad y existen modelos a prueba de explosión.
En la figura 5.23 puede verse una aplicación típica de un control de nivel de sólidos en un tanque, que mantiene el nivel entre los dos puntos donde están situados los detectores.
Interruptor de alar maRelé
1
111 11 1
;¿¿¿7
nterruptor aearo de motor
Z? Z r
paletas
L. -1
11
L- --t
o
Fig. 522 Medidor de paletas rotativas. Fig. 523 Control de nivel de sólidos.
2 Instrumentación
...!=ol----
Cuando el material desciende más abajo del detector inferior, éste pone en marcha automáticamente la maquinaria de alimentación del producto en el silo y esta maquinaria se para tan pronto como el producto alcanza el detector de nivel superior. El ciclo vuelve a repetirse cuando, al ir vaciándose el silo, los sólidos descienden a un nivel por debajo del detector inferior.
El medidor de radar de microondas consta de una fuente de microondas, situada a un lado del recipiente, y un detector en el lado opuesto, en la misma horizontal. Cuando el producto alcanza dicha horizontal, la señal deja de recibirse y se excita una alarma. Se aplica en la detección de bajo nivel de sólidos abrasivos.
5.22 Detectores de nivel continuos
El medidor de nivel de sondeo electromecánico representado en la figura 5.24 consiste en un pequeño peso móvil sostenido por un cable desde la parte supe rior del silo mediante poleas. Un motor y un programador situados en el exterior establecen un ciclo de trabajo del peso. Éste baja suavemente en el interior de la tolva hasta que choca contra el lecho de sólidos. En este instante, el cable se afloja, y un detector adecuado invierte el sentido del movimiento del peso con lo que éste asciende hasta la parte superior de la tolva, donde se para, repitiéndose el ciclo nuevamente. Un indicador exterior señala el punto donde el peso ha in vertido su movimiento indicando así el nivel en aquel momento. El instrumento se caracteriza por su sencillez, puede emplearse en el control de nivel, pero debe ser muy robusto mecánicamente para evitar una posible rotura del conjunto den tro de la tolva lo que podría dar lugar a la posible rotura de los mecanismos de vaciado.
El medidor de nivel de báscula (fig. 5.25) mide el nivel de sólidos indirectamente a través del peso del conjunto tolva más producto; como el peso de la tolva es conocido, es fácil determinar el peso del producto y por lo tanto el ni-
Progra madory detec tor 1-
- -8
Fig. 524 Medidor de nivel de sondeo electromecánico. Fig. 525 Medidor de nivel de báscula.
Medición de nivel
vel. La tolva se apoya en una plataforma de carga actuando sobre la palanca de una báscula o bien carga sobre otros elementos de medida neumáticos, hidráuli cos o eléctricos (galga extensométrica y microprocesador).
De estos elementos, uno de los más empleados es el de galga extensométri ca. El lector interesado puede acudir al capítulo 7 donde se estudian estos elementos de medida.
El sistema es relativamente caro, en particular en el caso de grandes tolvas, pudiendo trabajar a altas presiones y temperaturas. Su precisión depende del sen sor utilizado pudiendo variar de -1- 0,5 a + 1% .
El medidor de nivel capacitivo (fig. 5.26) es parecido al estudiado en la me dición de nivel de los líquidos con la diferencia de que tiene más posibilidades de error por la mayor adherencia que puede presentar el sólido en la varilla ca pacitiva. La lectura viene influida además por las variaciones de densidad del só lido. La varilla del medidor está aislada y situada verticalmente en el tanque y bien asegurada mecánicamente para resistir la caída del producto y las fuerzas generadas en los deslizamientos internos.
Fig. 526 Medidor de nivel capacitivo. ' / ./ / /
La medida está limitada a materiales en forma granular o en polvo que sean buenos aislantes, la presión y temperatura máximas de servicio pueden ser de 50 bar y 150º C y el aparato debe calibrarse para cada tipo de material. Su precisión es de unos ± 15 mm aproximadamente.
El medidor de presión diferencial se emplea en la medida y el control conti nuo del nivel de lechos fluidizados. Según puede verse en la figura 5.27 consiste en dos orificios de purga de aire situados en el depósito por debajo y por en cima del lecho. Un instrumento transmisor neumático o electrónico mide la pre sión diferencial posterior de los dos orificios mencionados que depende del nivel del lecho fluidizado. El instrumento puede trabajar a temperaturas superiores a300° e y posee una respuesta rápida.
El medidor de nivel de ultrasonidos (fig. 5.28) consiste en un emisor de ul trasonidos que envía un haz horizontal a un receptor colocado al otro lado del tanque. Si el nivel de sólidos está más bajo que el haz, el sistema entra en osci lación enclavando un relé. Cuando los sólidos interceptan el haz, el sistema deja
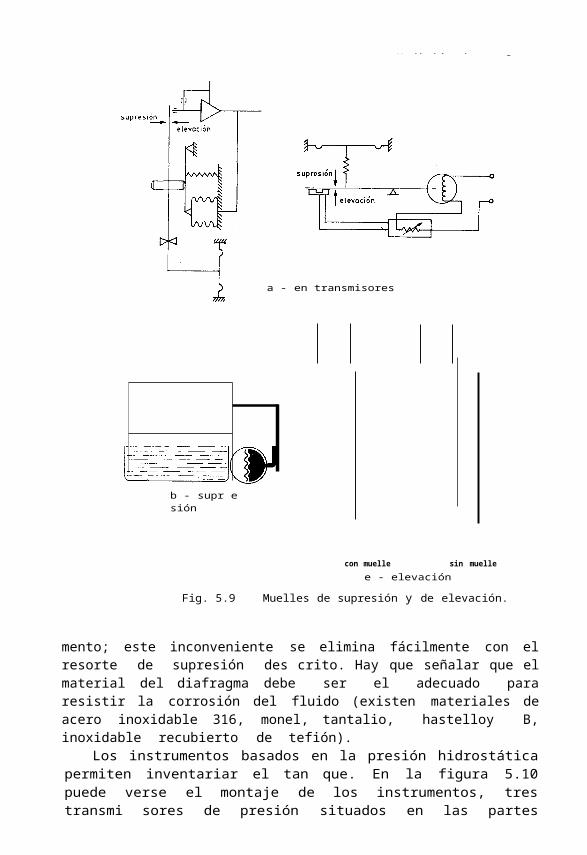
2 Instrumentación
Tanque air e
purga
Transmisor de presión diferencial
Fig. 5.27 Medidor de presión diferencial.
de oscilar y el relé se desexcita actuando sobre una alarma o sobre la maquinaria de descarga del depósito.
Disponiendo el haz de ultrasonidos en dirección vertical, el instrumento pue de actuar como indicación continua del nivel midiendo el tiempo de tránsito de un impulso ultrasónico, entre la fuente emisora, la superficie del producto donde se refleja y el receptor situado en la propia fuente.
Como la superficie de la mayor parte de los productos sólidos reflejan en mayor o menor grado los ultrasonidos, el sistema es adecuado para la mayor parte de los sólidos con mucho polvo, alta humedad, humos o vibraciones, y puede emplearse tanto en materiales opacos como transparentes. Sin embargo, si la superficie del material no es nítida, el sistema es susceptible de dar señales erróneas. El uso del ordenador permite resolver este inconveniente, al 1!1macenar el perfil ultrasónico del lecho del sólido e interpretarlo para obtener el nivel co-
Receptor Emisor
1 1 1 ¡ 1 1 1 1 1 , ,
....._ _r) ( ,.....) ....._
_..........._ _,.........._ ,......
- "'\
Fig. 528 Medidor de nivel de ultrasonidos.

Medición de 2
rrecto del sólido. Asimismo, el ordenador proporciona características de autocom probación («self-checking») del instrumento de medida.
Su precisión es de ± 0,15 a ± 1% , puede construirse a prueba de explosión, pudiendo trabajar a temperaturas de hasta 150° C.
El medidor de radar de microondas consta de una fuente de microondas situada en la parte superior del tanque que emite un haz de microondas que se refleja sobre el sólido y es captado por un detector. El sistema es ideal en productos muy viscosos como el asfalto. Su precisión es de ± 2 mm y su campo de medida puede llegar a 40 metros.
Detector
Fig. 529 Medidor de nivel de radiación.
El medidor de nivel de radiación (fig. 5.29) es parecido al instrumento estu diado en la determinación del nivel de líquidos. Consiste en una fuente radiactiva de rayos gamma, dispuesta al exterior y en la parte inferior del tanque, que emite su radiación a través del lecho de sólidos siendo captada por un detector exterior. El grado de radiación recibida depende del espesor de sólidos que se encuentra entre la fuente y el receptor. La fuente radiactiva y el receptor pueden disponerse también en un. plano horizontal, en cuyo caso el aparato trabaja como detector discontinuo todo-nada.
El instrumento puede trabajar a altas temperaturas hasta unos 1300° C, pre siones máximas de 130 bar, en materiales peligrosos o corrosivos, no requiere ninguna abertura o conexión a través del tanque y admite control neumático o electrónico. Sin embargo, es un sistema de coste elevado que necesita una super visión periódica desde el punto de vista de seguridad, debe calibrarse para cada tanque y no puede aplicarse a materiales a los que afecte la radiactividad.
Su precisión es de + 1 % y su campo de medida de 0,5 m por cada fuente, pudiendo emplearse varias para aumentar el intervalo de medida del nivel.
En la tabla 5.2 figuran las características. principales de los medidores de nivel de sólidos.
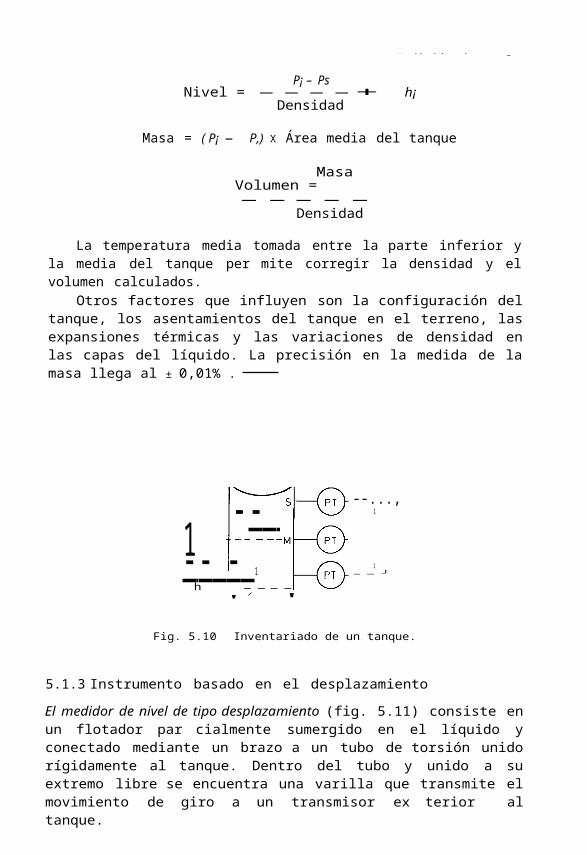
Tabla 5.2 Características de los medidores de nivel de sólidos
TemperaturasPunto fijo Precisión en máxima Tanques
% de toda de servicioTipo Alto Bajo Continuo la escala º C Abiertos Cerrados Desventajas Ventajas
Diafragma Sí Sí No 50 mm 60 Sí Sí No admite materiales gra- Bajo coste, sensible a ma-
nulares > 80 mm. Tanques teriales de variada den- a baja presión sidad
Cono suspendido Sí Sí » 50 mm 60 » No Debe estar protegido Bajo coste
Varilla flexible Sí No » 25 mm 300 » No Relé retardo, sólo nivel alto Muy
sensible
Conductivo Sí Sí » 25 mm 300 » Sí Conductividad materiales Tanques a presión
Paletas rotativas Sí Sí » 25 mm 60 » No Tanques abiertos o a baja Materiales diversos, apresión prueba de explosión
1\)
3"!!l.23CD:::i
5;:::i:;·a.e:!!l.:::!.
Sondeoelectromecánico - - Sí ± 1 % 60 » No Resistencia mecánica media Sencillo
Báscula - - » ±0,5-1 % 900 » Sí Coste elevado Preciso y seguro, altaspresión y temperatura
Capacitivo - - » 15 mm 150 » Sí Materiales aislantes, calibra-ción individual, adheren-cías producto Bajo coste
Presión diferencial - - Sí - 300 » Sí Coste medio, posible obtu-ración orificio purga Respuesta rápida
Ultrasonidos Sí Sí » ± 0,5-1 % 150 » Sí Coste medio Materiales opacos y trans-parentes, a prueba de explosión
Radar Sí Sí » ± 2 mm 150 » Sí Coste medio Productos muy
viscosos Radiación » » » ± 0,5-1 % 1.300 » Sí Coste elevado, supervis. se- Tanque sin aberturas,guridad, calibr. individual productos corrosivos yvarias fuentes peligrosos, altas
presio- nes y temperaturas