capitolo 7 analisi dei dati sperimentali - libero...
TRANSCRIPT
Capitolo 7
Analisi dei dati sperimentali
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
102
Capitolo 7
7.1 Introduzione
A partire da test sperimentali, attraverso l’analisi modale è possibile identificare le
caratteristiche dinamiche di una struttura definite generalmente dalle frequenze proprie
e dai modi di vibrare. La conoscenza di questi parametri, ottenuti sottoponendo la
struttura a vibrazioni, consente di avere informazioni a livello globale o locale sul
comportamento (risposta alla sollecitazione) o sullo stato (livello di danneggiamento)
della struttura.
In questo capitolo è stata analizzata la metodica di come, partendo da acquisizioni
sperimentali, è possibile risalire alle caratteristiche dinamiche della struttura.
Grazie ad una collaborazione tra l’Università di Pavia e l’ELSA Laboratory (European
Laboratory for Structural Assestement) del JRC (Joint Research Centre) ad Ispra, è stato
possibile accedere, tramite una password, al loro database e analizzare dati sperimentali
relative alla prove DamDet Pavia (Steel Frame Plate, struttura danneggiata senza
controventi e Steel Frame struttura con i controventi) e Dispass ELSA (prove con Snap
Back e TMD).
I dati analizzati sono relativi alla struttura denominata Baby Frame realizzata e testata in
questo laboratorio, oggetto negli ultimi anni di numerose campagne di prove. Le
acquisizioni analizzate in questa tesi sono di tipo dinamico. Tuttavia all’ELSA
Laboratory, che si occupa della ricerca nel campo del patrimonio artistico e culturale,
vengono eseguite prove pseudodinamiche, dinamiche, cicliche, di carico e a fatica,
ovvero tutte quelle prove necessarie per la verifica di una struttura in ca, acciaio, mista e
in muratura. L’obiettivo principale di questo laboratorio è quello di contribuire alla
definizione di metodologie di intervento per il sistema diagnostico strutturale.
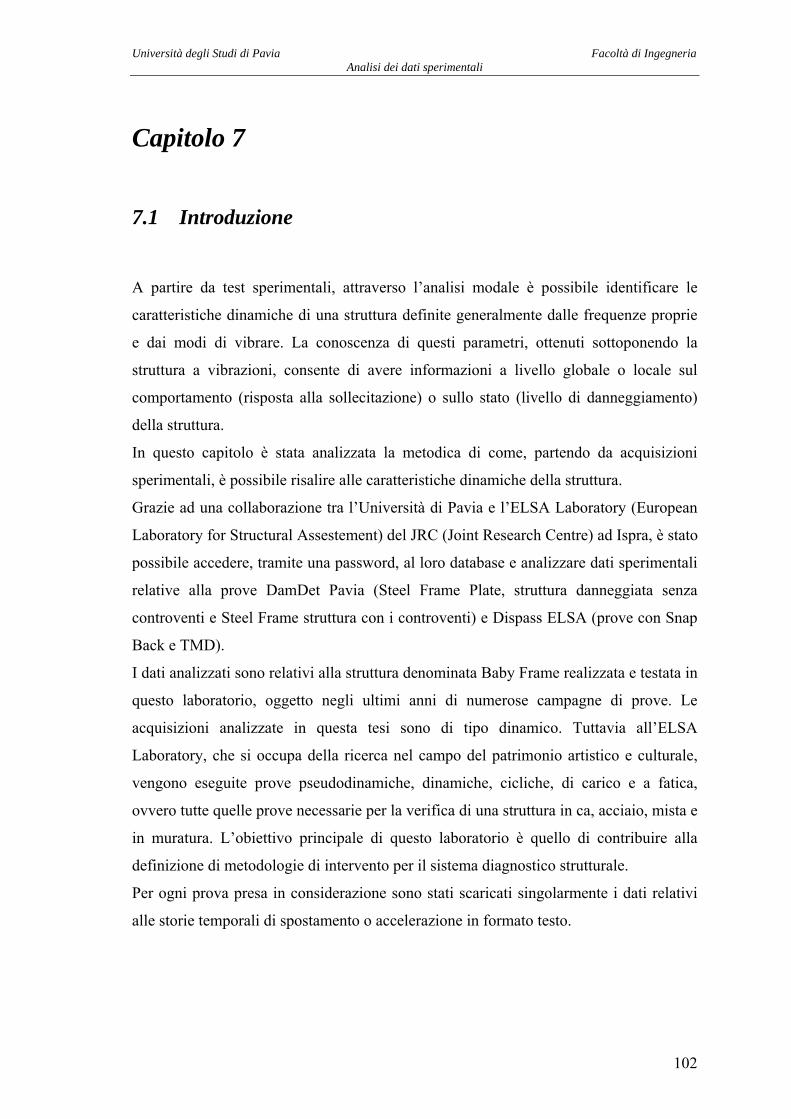
Per ogni prova presa in considerazione sono stati scaricati singolarmente i dati relativi
alle storie temporali di spostamento o accelerazione in formato testo.
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
103
Figura 7.1: Database dell’ELSA da cui sono state scaricate le prove
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
104
7.2 Descrizione del modello fisico
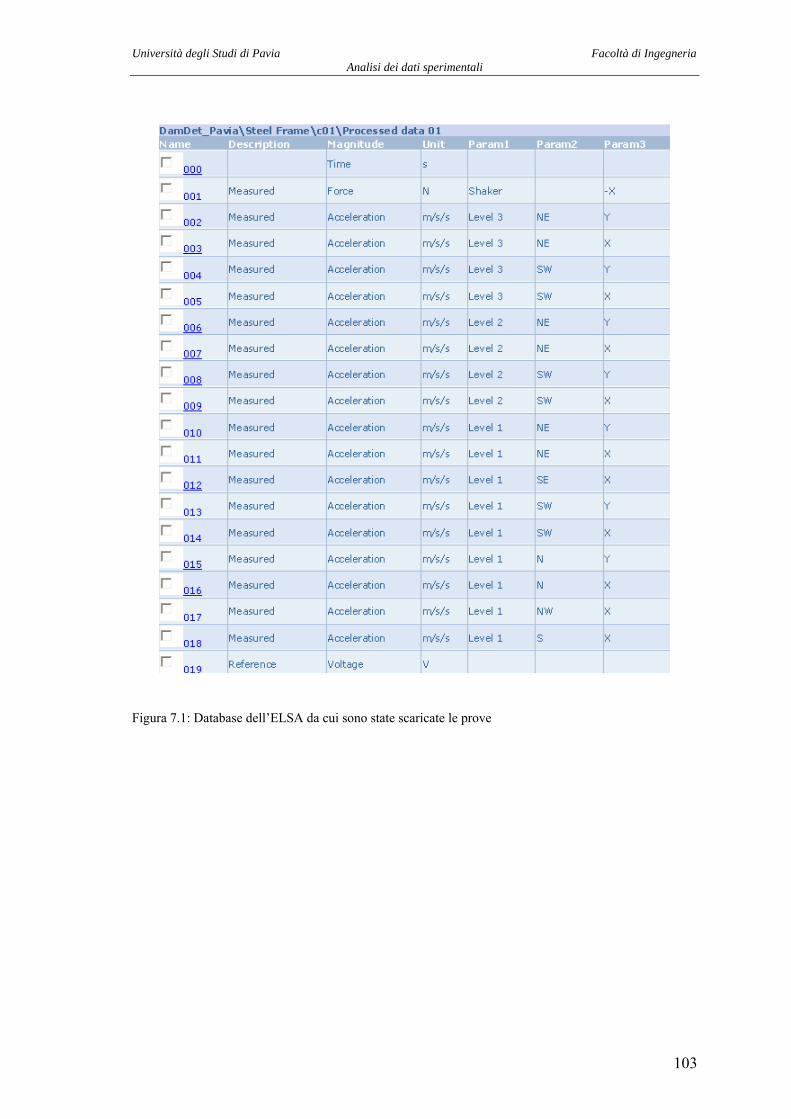
Il Baby Frame è costituito da un telaio in acciaio con solai in cemento e lamiera grecata
(con nervature in direzione trasversale). La struttura è formata da due campate
longitudinali di 4 m ciascuna (in direzione X) e da una campata trasversale di 2,5 m (in
direzione Y). L’altezza di ogni piano è di 2 m. Le colonne sono costituite da profilati in
acciaio Fe360 HEB140 e le travi longitudinali e trasversali sono costituite da IPE180
sempre in acciaio del tipo Fe360, saldate tra loro.
Figura 7.2: Visione generale del Baby Frame
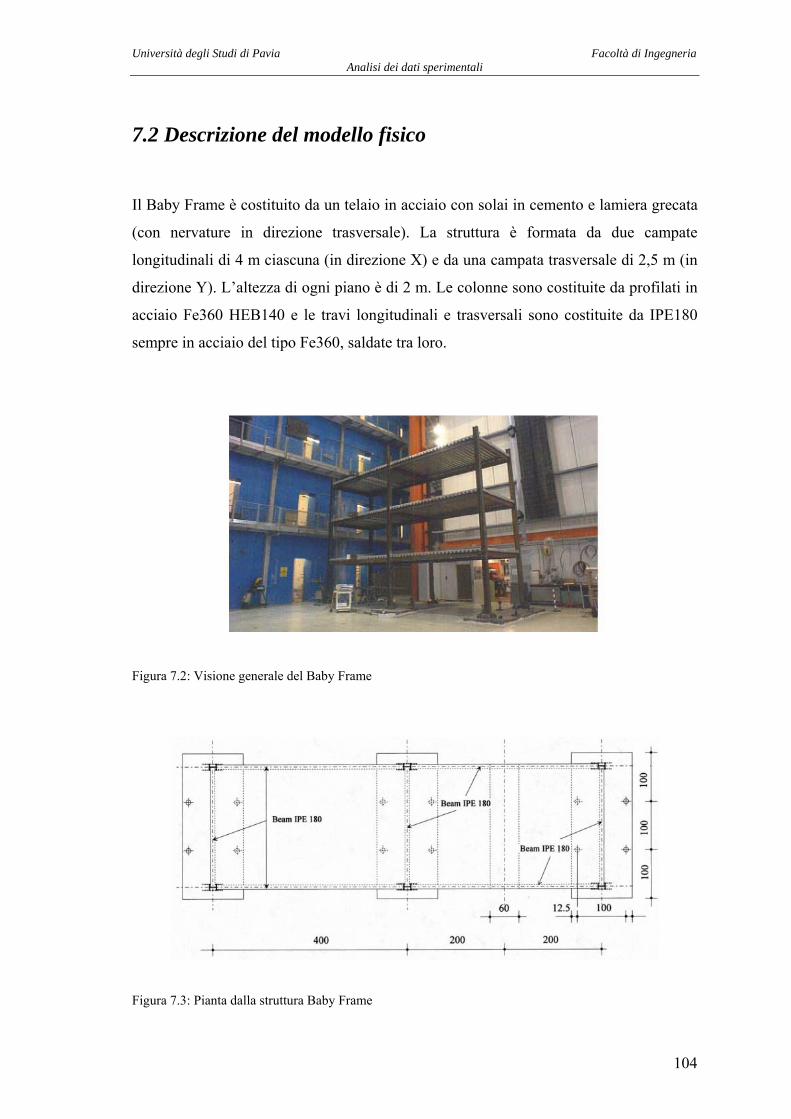
Figura 7.3: Pianta dalla struttura Baby Frame
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
105
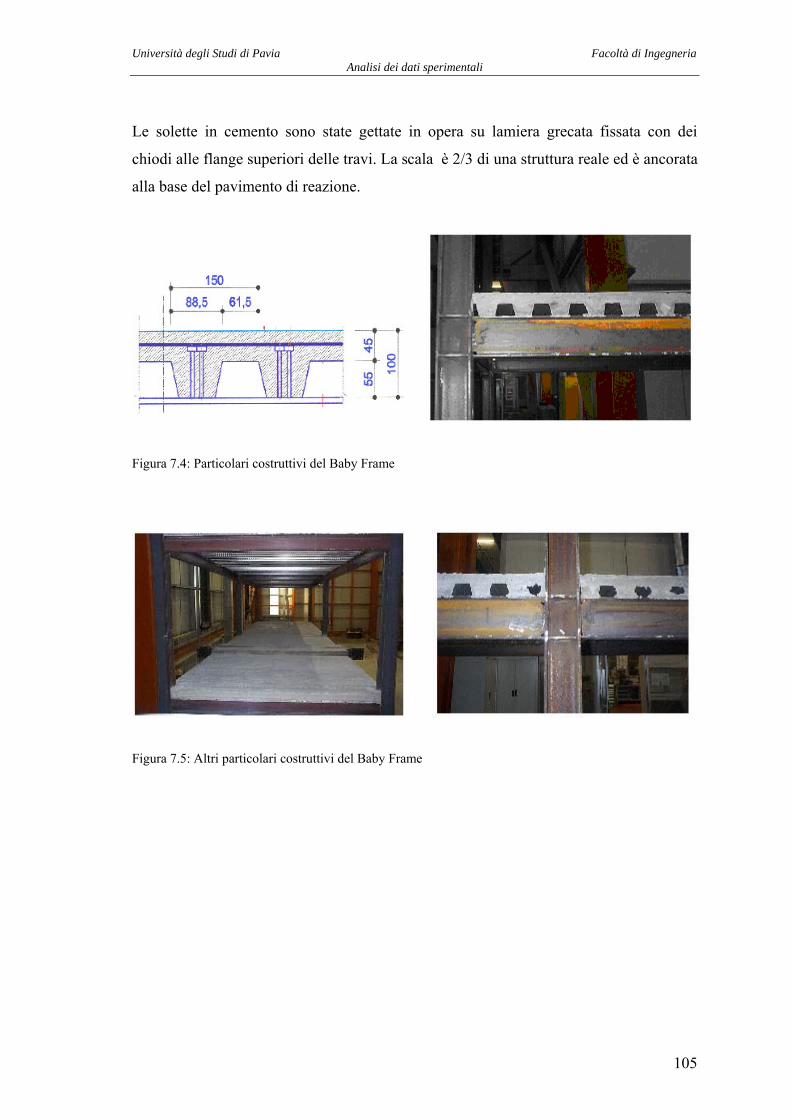
Le solette in cemento sono state gettate in opera su lamiera grecata fissata con dei
chiodi alle flange superiori delle travi. La scala è 2/3 di una struttura reale ed è ancorata
alla base del pavimento di reazione.
Figura 7.4: Particolari costruttivi del Baby Frame
Figura 7.5: Altri particolari costruttivi del Baby Frame
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
106
7.3 Prima campagna di prove
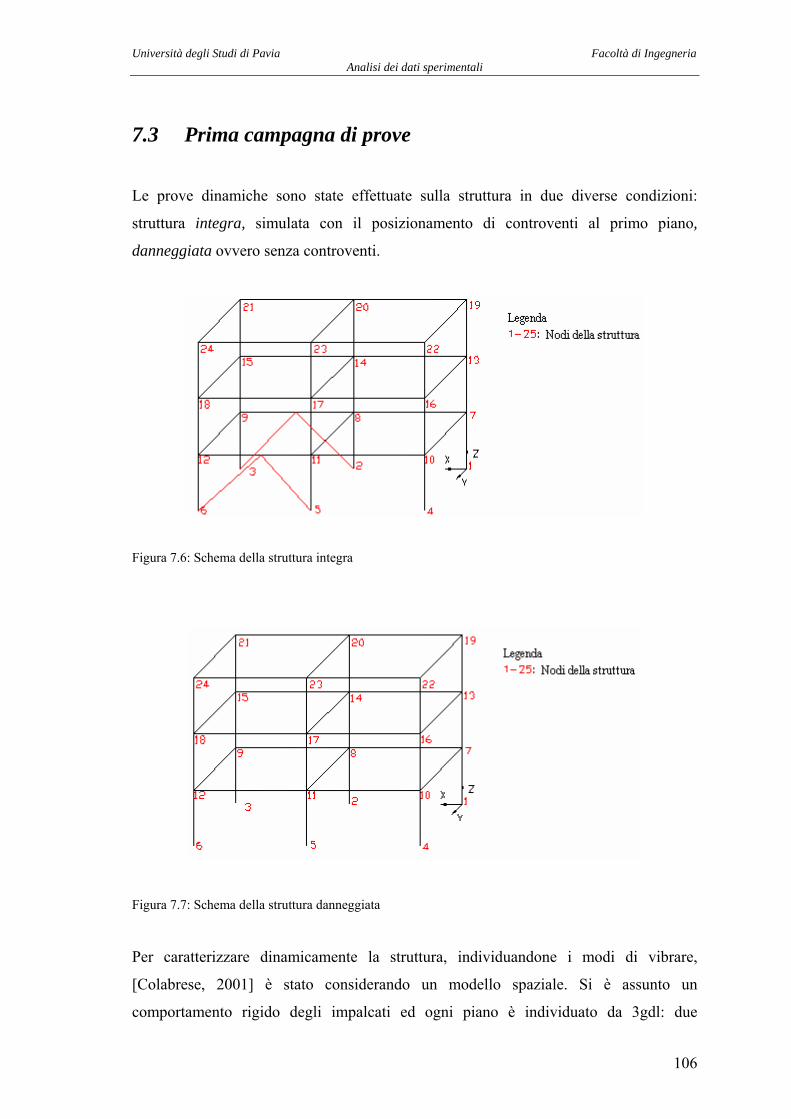
Le prove dinamiche sono state effettuate sulla struttura in due diverse condizioni:
struttura integra, simulata con il posizionamento di controventi al primo piano,
danneggiata ovvero senza controventi.
Figura 7.6: Schema della struttura integra
Figura 7.7: Schema della struttura danneggiata
Per caratterizzare dinamicamente la struttura, individuandone i modi di vibrare,
[Colabrese, 2001] è stato considerando un modello spaziale. Si è assunto un
comportamento rigido degli impalcati ed ogni piano è individuato da 3gdl: due
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
107
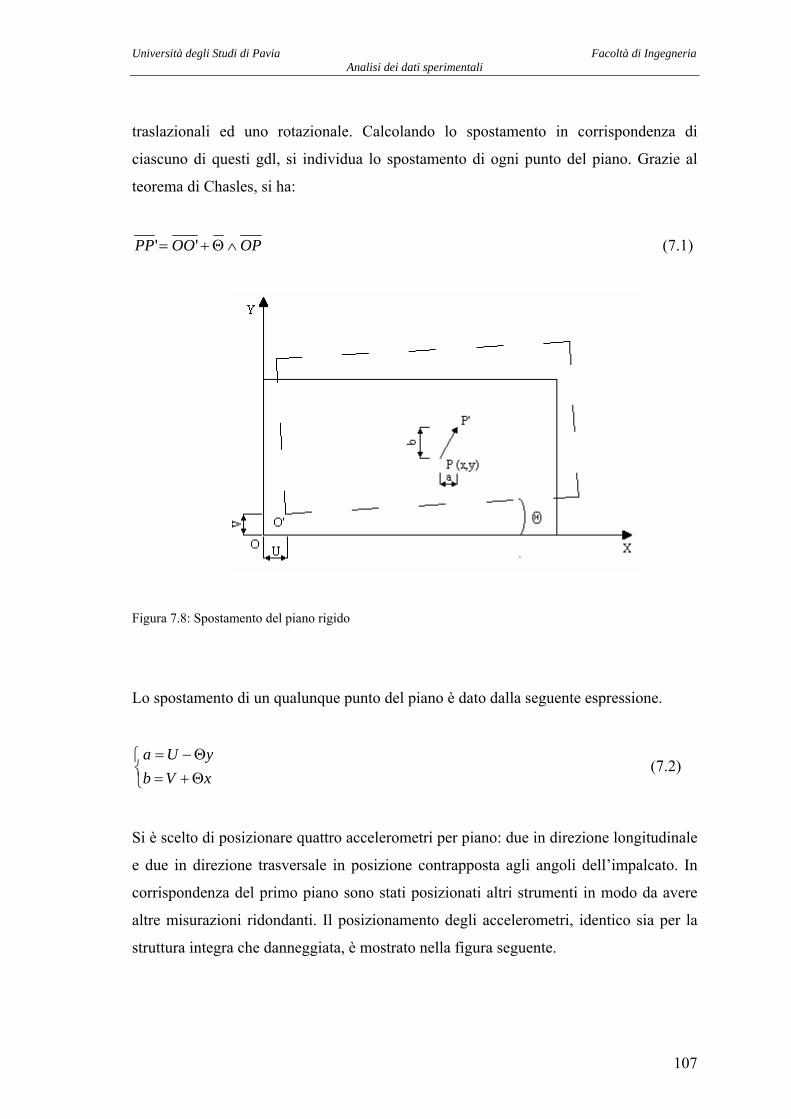
traslazionali ed uno rotazionale. Calcolando lo spostamento in corrispondenza di
ciascuno di questi gdl, si individua lo spostamento di ogni punto del piano. Grazie al
teorema di Chasles, si ha:
OPOOPP ∧Θ+= '' (7.1)
Figura 7.8: Spostamento del piano rigido
Lo spostamento di un qualunque punto del piano è dato dalla seguente espressione.
a U yb V x= −Θ⎧
⎨ = + Θ⎩ (7.2)
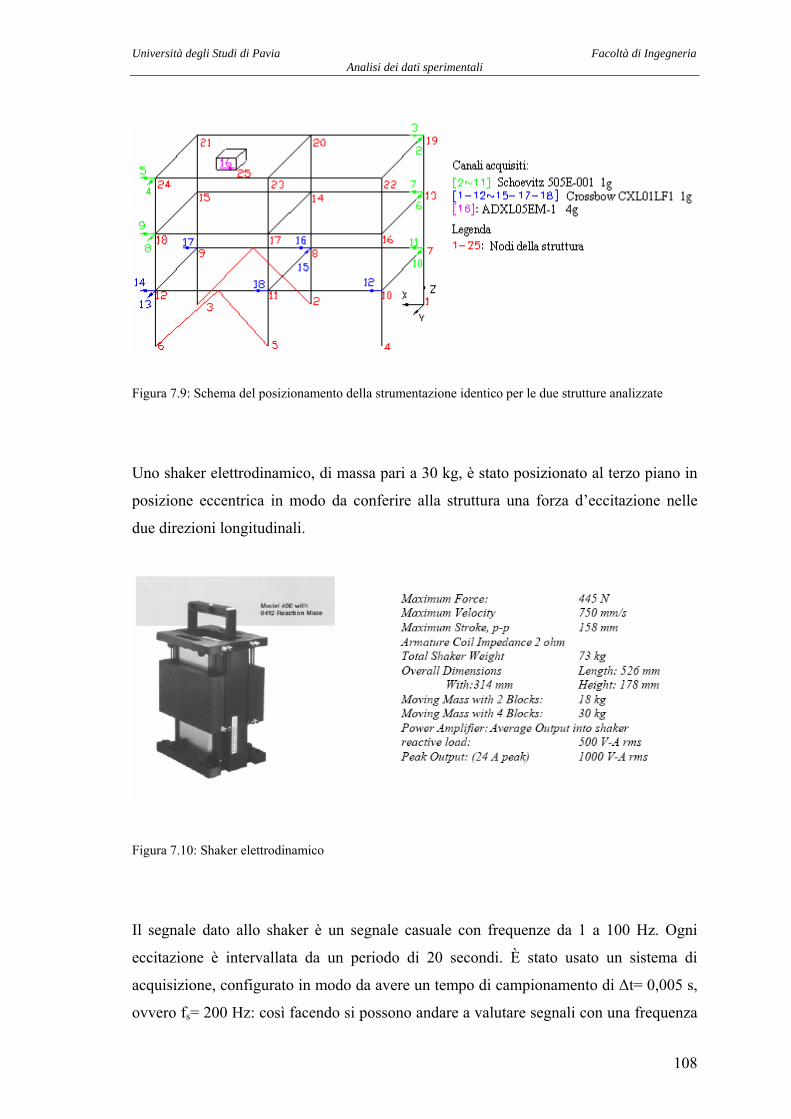
Si è scelto di posizionare quattro accelerometri per piano: due in direzione longitudinale
e due in direzione trasversale in posizione contrapposta agli angoli dell’impalcato. In
corrispondenza del primo piano sono stati posizionati altri strumenti in modo da avere
altre misurazioni ridondanti. Il posizionamento degli accelerometri, identico sia per la
struttura integra che danneggiata, è mostrato nella figura seguente.
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
108
Figura 7.9: Schema del posizionamento della strumentazione identico per le due strutture analizzate
Uno shaker elettrodinamico, di massa pari a 30 kg, è stato posizionato al terzo piano in
posizione eccentrica in modo da conferire alla struttura una forza d’eccitazione nelle
due direzioni longitudinali.
Figura 7.10: Shaker elettrodinamico
Il segnale dato allo shaker è un segnale casuale con frequenze da 1 a 100 Hz. Ogni
eccitazione è intervallata da un periodo di 20 secondi. È stato usato un sistema di
acquisizione, configurato in modo da avere un tempo di campionamento di ∆t= 0,005 s,
ovvero fs= 200 Hz: così facendo si possono andare a valutare segnali con una frequenza
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
109
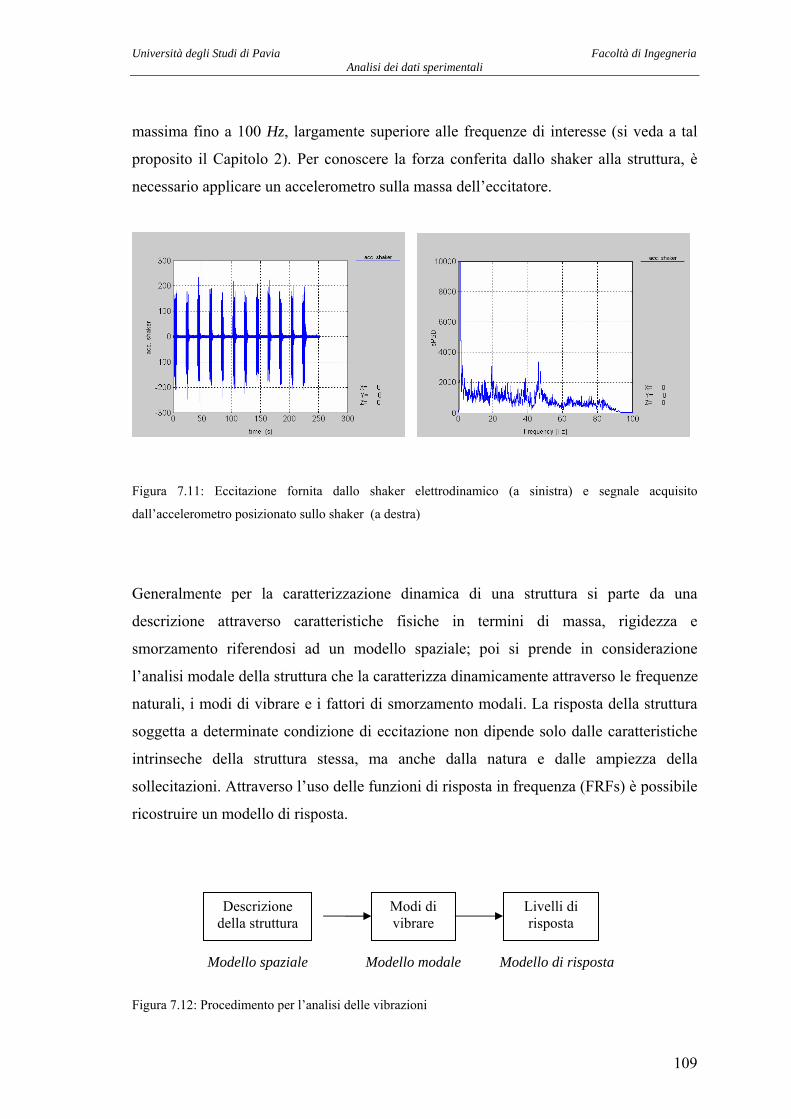
massima fino a 100 Hz, largamente superiore alle frequenze di interesse (si veda a tal
proposito il Capitolo 2). Per conoscere la forza conferita dallo shaker alla struttura, è
necessario applicare un accelerometro sulla massa dell’eccitatore.
Figura 7.11: Eccitazione fornita dallo shaker elettrodinamico (a sinistra) e segnale acquisito
dall’accelerometro posizionato sullo shaker (a destra)
Generalmente per la caratterizzazione dinamica di una struttura si parte da una
descrizione attraverso caratteristiche fisiche in termini di massa, rigidezza e
smorzamento riferendosi ad un modello spaziale; poi si prende in considerazione
l’analisi modale della struttura che la caratterizza dinamicamente attraverso le frequenze
naturali, i modi di vibrare e i fattori di smorzamento modali. La risposta della struttura
soggetta a determinate condizione di eccitazione non dipende solo dalle caratteristiche
intrinseche della struttura stessa, ma anche dalla natura e dalle ampiezza della
sollecitazioni. Attraverso l’uso delle funzioni di risposta in frequenza (FRFs) è possibile
ricostruire un modello di risposta.
Figura 7.12: Procedimento per l’analisi delle vibrazioni
Descrizione della struttura
Modi di vibrare
Livelli di risposta
Modello spaziale Modello modale Modello di risposta
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
110
La funzione di risposta in frequenza permette di conoscere il valore dell’uscita note
l’ampiezza e la pulsazione ω dell’ingresso. Si può procedere anche in senso inverso:
attraverso le FRF (che sono ricavabili in via sperimentale) è possibile ricavare le
frequenze proprie e i modi di vibrare della struttura. Quest’ultimo è l’approccio seguito
in questa tesi.
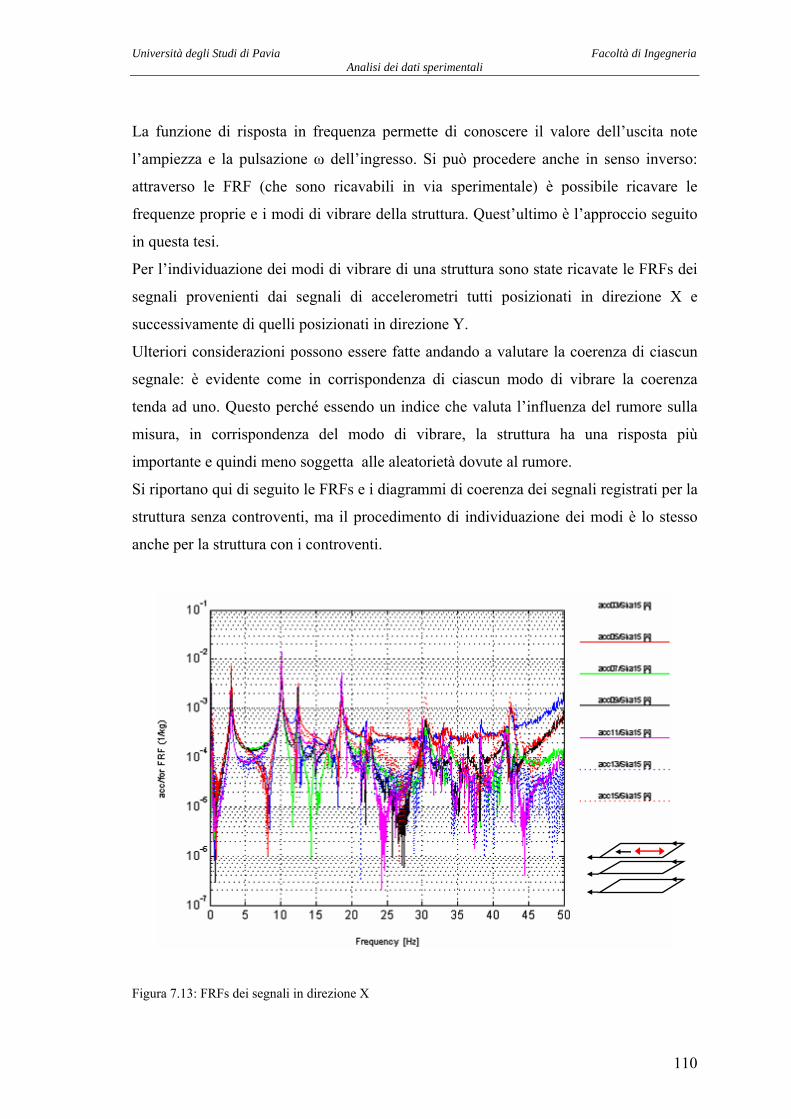
Per l’individuazione dei modi di vibrare di una struttura sono state ricavate le FRFs dei
segnali provenienti dai segnali di accelerometri tutti posizionati in direzione X e
successivamente di quelli posizionati in direzione Y.
Ulteriori considerazioni possono essere fatte andando a valutare la coerenza di ciascun
segnale: è evidente come in corrispondenza di ciascun modo di vibrare la coerenza
tenda ad uno. Questo perché essendo un indice che valuta l’influenza del rumore sulla
misura, in corrispondenza del modo di vibrare, la struttura ha una risposta più
importante e quindi meno soggetta alle aleatorietà dovute al rumore.
Si riportano qui di seguito le FRFs e i diagrammi di coerenza dei segnali registrati per la
struttura senza controventi, ma il procedimento di individuazione dei modi è lo stesso
anche per la struttura con i controventi.
Figura 7.13: FRFs dei segnali in direzione X
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
111
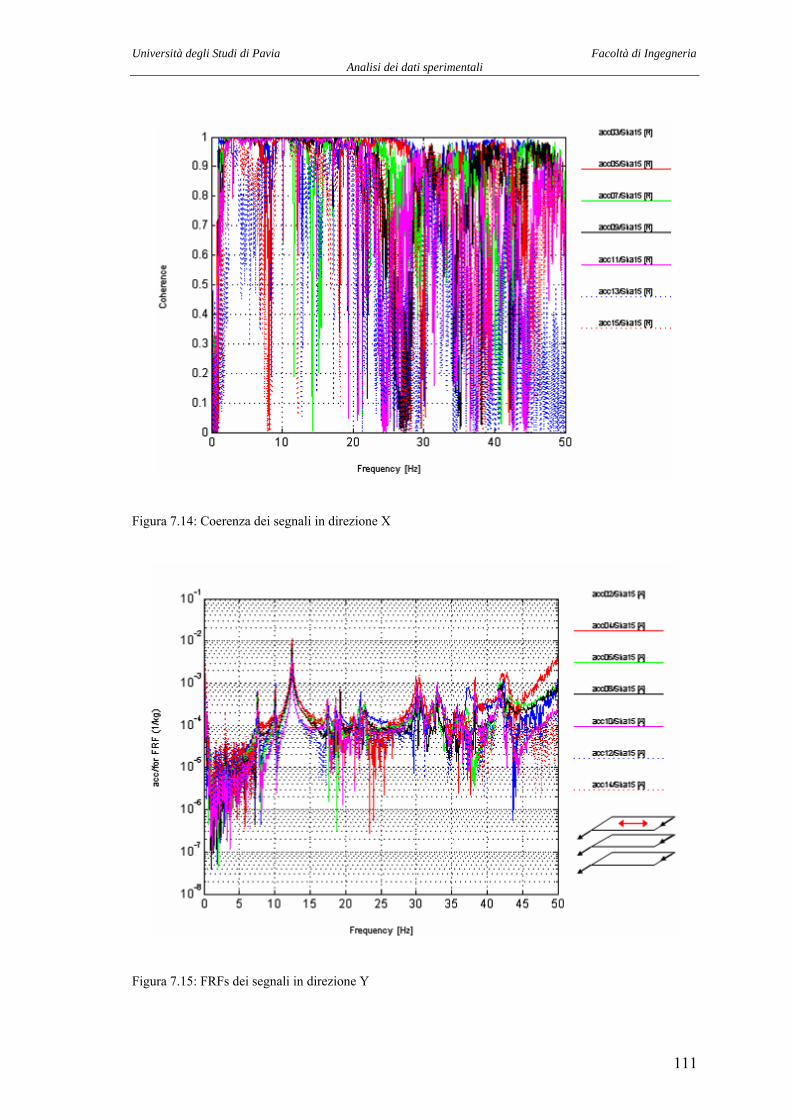
Figura 7.14: Coerenza dei segnali in direzione X
Figura 7.15: FRFs dei segnali in direzione Y

Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
112
Figura 7.16: Coerenza dei segnali in direzione Y
Partendo dalle basse frequenze si nota un picco di risposta intorno ai 3 Hz evidente nelle
FRFs degli accelerometri in direzione X e con la forza di eccitazione dello shaker nella
stessa direzione. Da queste osservazioni si può ipotizzare che in quell’intorno ci sia un
modo traslatorio in X. Stesso discorso può essere fatto per i picchi a 10 Hz e 18 Hz
prevalenti in direzione X. Il picco intorno a 7 Hz può essere attribuito ad un modo
traslazionale in direzione Y, mentre quello intorno a 11 Hz essendo presente quasi con
la stessa ampiezza nelle FRFs delle due direzioni può essere considerato un modo
torsionale. Procedendo con queste considerazioni preliminari si è però riscontrata una
certa difficoltà ad individuare gli altri modi flessionali nella direzione trasversale e
torsionali per la struttura.
Un indagine visiva e approssimativa di questo genere delle FRFs permette solo di fare
delle considerazioni sui possibili modi di vibrare .
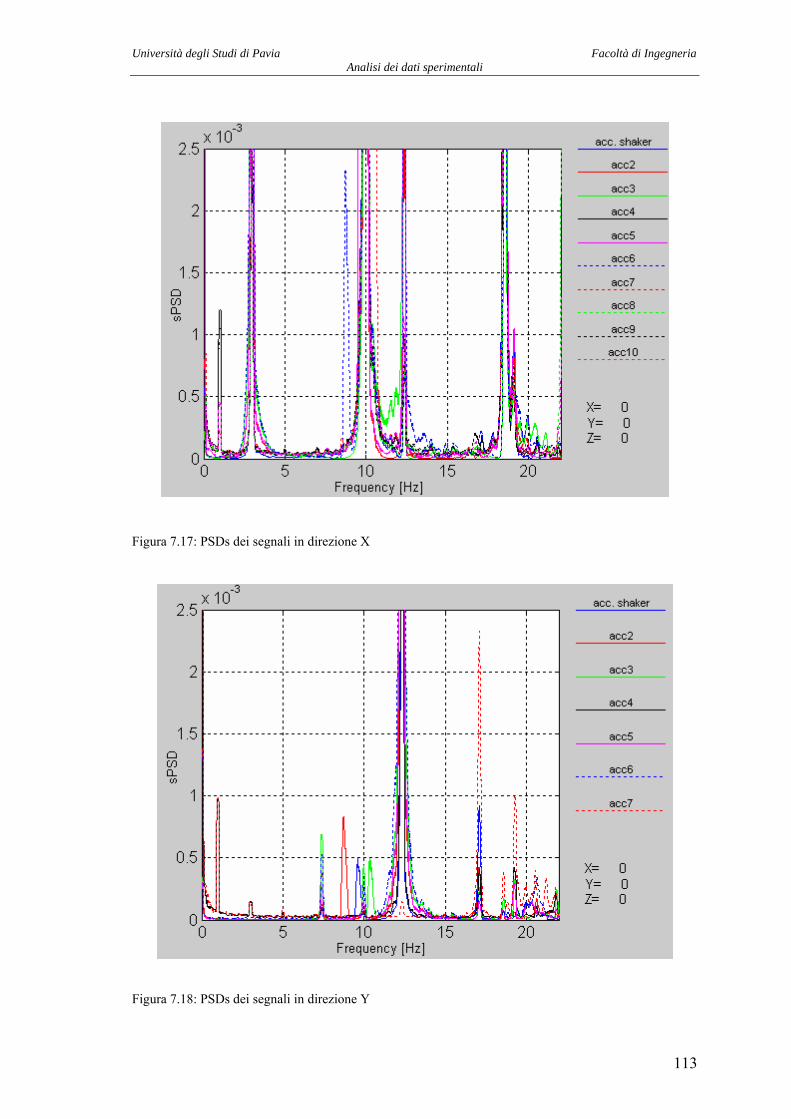
Ulteriori, ma analoghe supposizioni, possono essere fatte andando a visionare le PSD
dei segnali nelle due diverse direzioni di acquisizione. Di seguito si riportano le PSD
relative ai segnali sempre per la struttura senza controventi.
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
113
Figura 7.17: PSDs dei segnali in direzione X
Figura 7.18: PSDs dei segnali in direzione Y
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
114
Dall’analisi visiva delle PSD si può ipotizzare per le frequenze intorno a 3 Hz, 10 Hz e
18 Hz modi traslatori in X; 7 Hz e 12 Hz modi traslatori in direzione Y; al picco di 18
Hz potrebbe essere attribuito un modo torsionale. Ci sono alcune difficoltà ad
individuare i modi mancanti soprattutto quelli flessionali in Y: ciò è dovuto al fatto che
lo shaker al terzo piano eccita la struttura solo in direzione longitudinale e la visione
quindi dei modi in direzione Y risulta complicata.
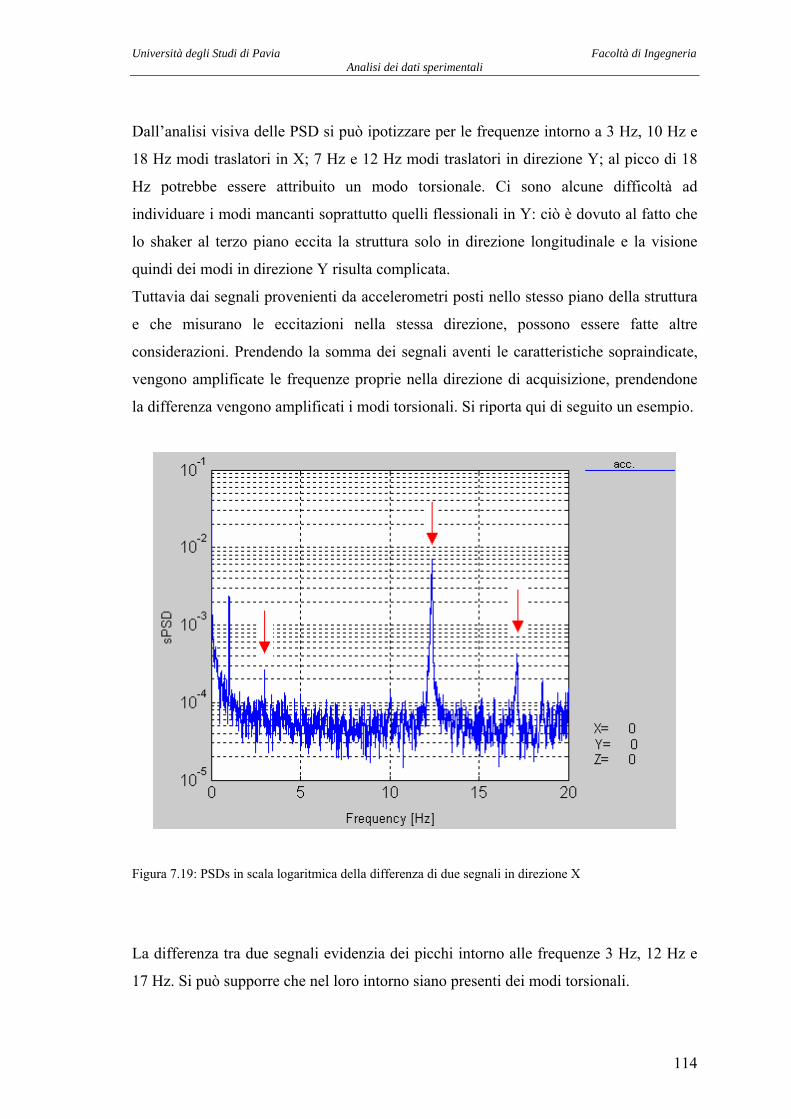
Tuttavia dai segnali provenienti da accelerometri posti nello stesso piano della struttura
e che misurano le eccitazioni nella stessa direzione, possono essere fatte altre
considerazioni. Prendendo la somma dei segnali aventi le caratteristiche sopraindicate,
vengono amplificate le frequenze proprie nella direzione di acquisizione, prendendone
la differenza vengono amplificati i modi torsionali. Si riporta qui di seguito un esempio.
Figura 7.19: PSDs in scala logaritmica della differenza di due segnali in direzione X
La differenza tra due segnali evidenzia dei picchi intorno alle frequenze 3 Hz, 12 Hz e
17 Hz. Si può supporre che nel loro intorno siano presenti dei modi torsionali.
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
115
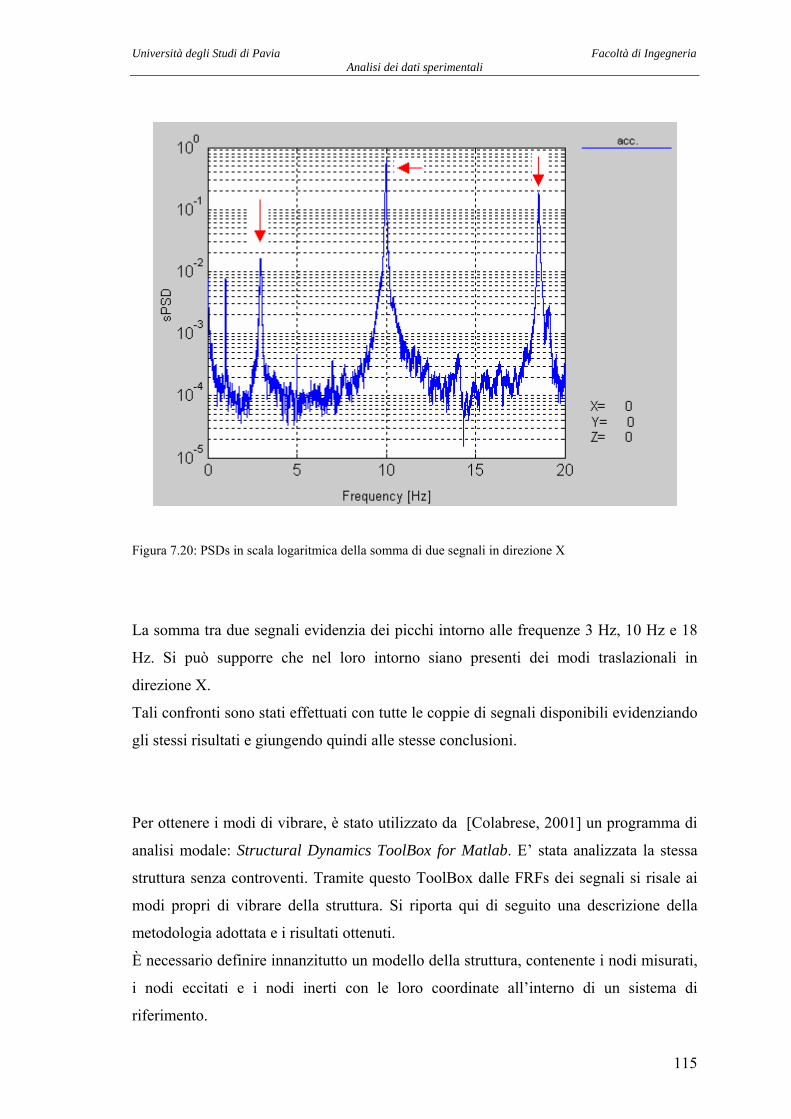
Figura 7.20: PSDs in scala logaritmica della somma di due segnali in direzione X
La somma tra due segnali evidenzia dei picchi intorno alle frequenze 3 Hz, 10 Hz e 18
Hz. Si può supporre che nel loro intorno siano presenti dei modi traslazionali in
direzione X.
Tali confronti sono stati effettuati con tutte le coppie di segnali disponibili evidenziando
gli stessi risultati e giungendo quindi alle stesse conclusioni.
Per ottenere i modi di vibrare, è stato utilizzato da [Colabrese, 2001] un programma di
analisi modale: Structural Dynamics ToolBox for Matlab. E’ stata analizzata la stessa
struttura senza controventi. Tramite questo ToolBox dalle FRFs dei segnali si risale ai
modi propri di vibrare della struttura. Si riporta qui di seguito una descrizione della
metodologia adottata e i risultati ottenuti.
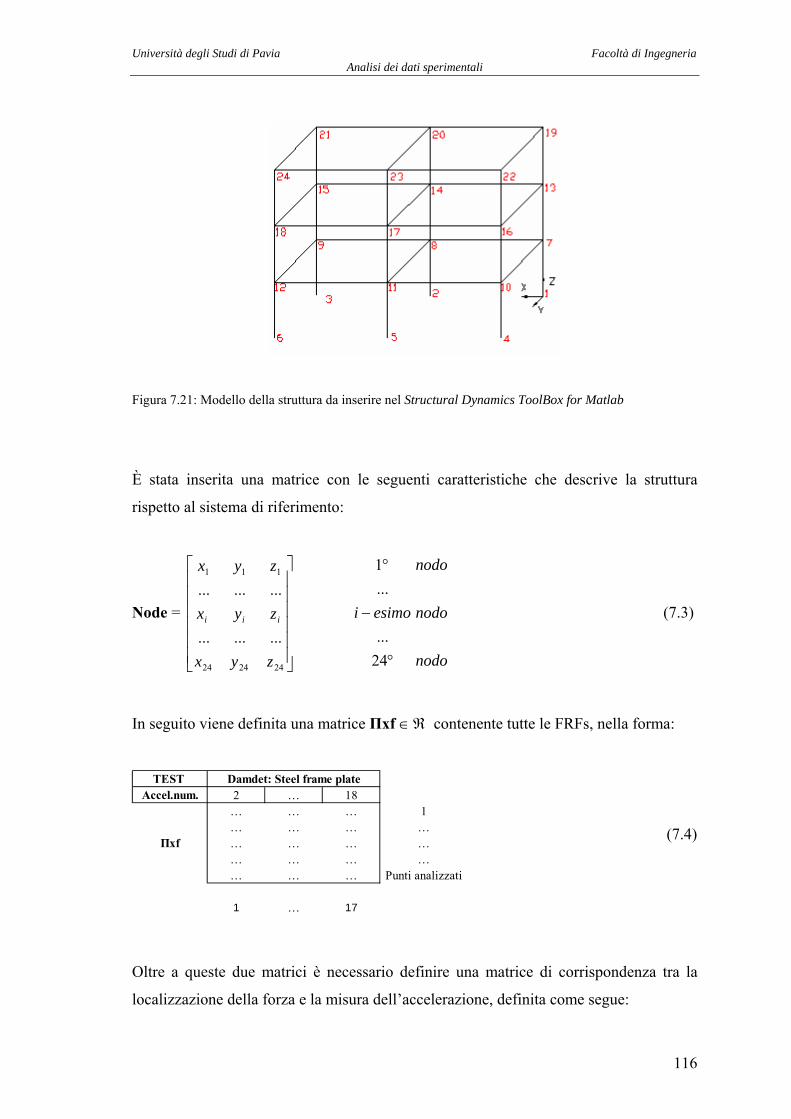
È necessario definire innanzitutto un modello della struttura, contenente i nodi misurati,
i nodi eccitati e i nodi inerti con le loro coordinate all’interno di un sistema di
riferimento.
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
116
Figura 7.21: Modello della struttura da inserire nel Structural Dynamics ToolBox for Matlab
È stata inserita una matrice con le seguenti caratteristiche che descrive la struttura
rispetto al sistema di riferimento:
Node =
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
242424
111
.........
.........
zyx
zyx
zyx
iii
°
−
°
24...
...1
esimoi
nodo
nodo
nodo
(7.3)
In seguito viene definita una matrice Πxf ℜ∈ contenente tutte le FRFs, nella forma:
(7.4)
Oltre a queste due matrici è necessario definire una matrice di corrispondenza tra la
localizzazione della forza e la misura dell’accelerazione, definita come segue:
TEST Accel.num. 2 … 18
… … … 1… … … …
Πxf … … … …… … … …… … … Punti analizzati
1 … 17
Damdet: Steel frame plate
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
117
[ ]ne.de na.da nc 0 0 0 0=XFdof (7.5)
dove:
ne = numero del nodo d’eccitazione;
de = direzione dell’eccitazione;
na = numero del nodo dove si misura l’accelerazione;
da = direzione di misura dell’accelerazione;
nc = numero colonna della FRF corrispondente nella matrice IIxf.
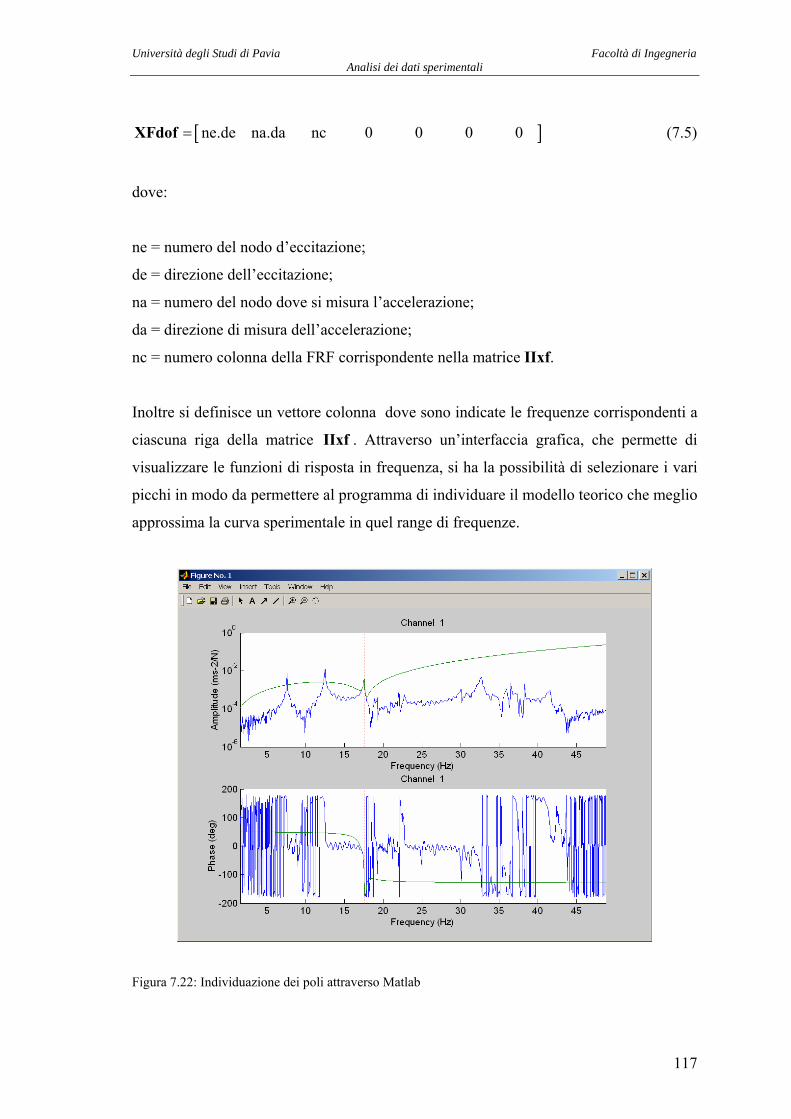
Inoltre si definisce un vettore colonna dove sono indicate le frequenze corrispondenti a
ciascuna riga della matrice IIxf . Attraverso un’interfaccia grafica, che permette di
visualizzare le funzioni di risposta in frequenza, si ha la possibilità di selezionare i vari
picchi in modo da permettere al programma di individuare il modello teorico che meglio
approssima la curva sperimentale in quel range di frequenze.
Figura 7.22: Individuazione dei poli attraverso Matlab

Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
118
Nella Figura 7.22 viene evidenziata la curva verde corrispondente al modello teorico
che meglio approssima la FRF in quel polo, dove per polo si intende uno degli zeri del
denominatore della funzione di trasferimento. Una volta identificati tutti i poli, abbiamo
a disposizione una matrice IIpo costituita da:
IIpo =
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
99
11
......
......
ς
ς
ς
f
f
f
ii
°
−
°
9...
...1
esimoi
Modo
Modo
Modo
...
... (7.6)
dove le frequenze sono espresse in Hz. A questo punto il programma ottimizza il
modello trovato in modo da minimizzare i valori dei residui delle frazioni dei polinomi
individuati. Risultato di questa operazione è una nuova matrice delle frequenze IIpo.
Una volta individuato il modello che più approssima i dati sperimentali, si conoscono le
deformate modali dei punti dove sono state prese le misure. Per conoscere gli
spostamenti degli altri punti (inerti) della struttura, si deve utilizzare una matrice
=Node_Dof A che relaziona lo spostamento di qualunque nodo in funzione dello
spostamento di un gdl (ovvero di un nodo misurato).
d u= A% %
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
14
2
24
24
1
1
...
.........
u
u
A
dd
dd
y
x
y
x
(7.7)
dove id è lo spostamento del nodo i-esimo, iu è lo spostamento del nodo (in direzione
di misura dell’accelerazione) in cui è presente l’accelerometro i-esimo. Una volta
completata la matrice Node_Dof si conoscono gli spostamenti di tutti i nodi della
struttura in corrispondenza di ciascun modo di vibrare, per cui è possibile disegnare le
deformate modali:
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
119
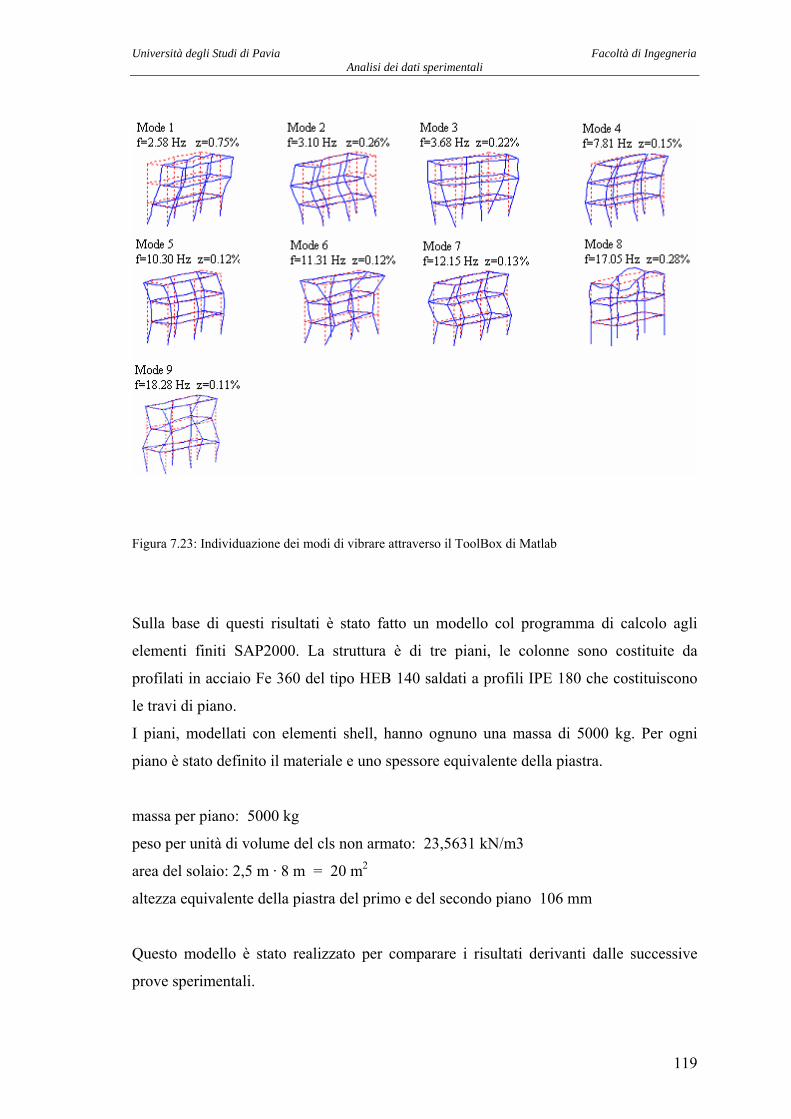
Figura 7.23: Individuazione dei modi di vibrare attraverso il ToolBox di Matlab
Sulla base di questi risultati è stato fatto un modello col programma di calcolo agli
elementi finiti SAP2000. La struttura è di tre piani, le colonne sono costituite da
profilati in acciaio Fe 360 del tipo HEB 140 saldati a profili IPE 180 che costituiscono
le travi di piano.
I piani, modellati con elementi shell, hanno ognuno una massa di 5000 kg. Per ogni
piano è stato definito il materiale e uno spessore equivalente della piastra.
massa per piano: 5000 kg
peso per unità di volume del cls non armato: 23,5631 kN/m3
area del solaio: 2,5 m · 8 m = 20 m2
altezza equivalente della piastra del primo e del secondo piano 106 mm
Questo modello è stato realizzato per comparare i risultati derivanti dalle successive
prove sperimentali.
Università degli Studi di Pavia Facoltà di Ingegneria Analisi dei dati sperimentali
120
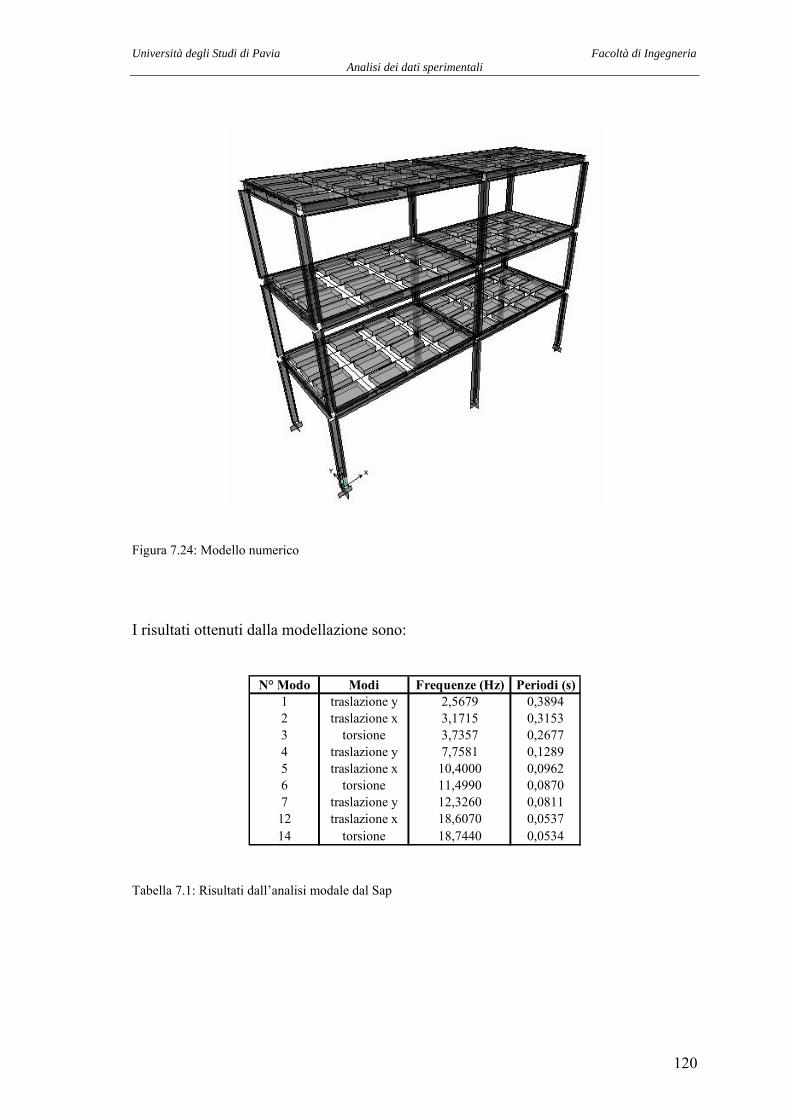
Figura 7.24: Modello numerico
I risultati ottenuti dalla modellazione sono:
N° Modo Modi Frequenze (Hz) Periodi (s)1 traslazione y 2,5679 0,38942 traslazione x 3,1715 0,31533 torsione 3,7357 0,26774 traslazione y 7,7581 0,12895 traslazione x 10,4000 0,09626 torsione 11,4990 0,08707 traslazione y 12,3260 0,0811
12 traslazione x 18,6070 0,053714 torsione 18,7440 0,0534
Tabella 7.1: Risultati dall’analisi modale dal Sap