chapter 3users.dsic.upv.es/~jlinares/grafics/chapter 3.pdf · computer graphics tema 3. ... – the...
TRANSCRIPT

Tema 3. Transformaciones 2D 1Computer Graphics Chapter 3. 2D Transformations 1
Chapter 3Chapter 3
Chapter 3. 2D Transformations3.1 Introduction3.2 2D Transformation3.3 Composing transformations3.4 Geometric transformations around a point3.5 Coordinate system transformations

Tema 3. Transformaciones 2D 2Computer Graphics Chapter 3. 2D Transformations 2
3.1 Introduction
• The model to visualize is on 2D or 3D geometric space
• Geometric transformations are generally compulsory in order to visualize our model into a device
• Geometric transformations are also compulsory in CAD systems, simulation, computer games etc.
• The transformations we are going to study are: translation, rotation and scaling

Tema 3. Transformaciones 2D 3Computer Graphics Chapter 3. 2D Transformations 3
3.1 Introduction
2D and 3D coordinate systems
Y
Point at (2,-2,2)
R3
Right-handedcoordinate system
Z
X
Point at (2,3)R2
Y
X

Tema 3. Transformaciones 2D 4Computer Graphics Chapter 3. 2D Transformations 4
3.1 Introduction
Y
Operation to movesum 5 to x, sum 4 to y
R2
X
Here=(2,3)
There=(7,7)
An example of geometric transformation

Tema 3. Transformaciones 2D 5Computer Graphics Chapter 3. 2D Transformations 5
3.1 Introduction
• How can relate different objects?– Object position can be considered
respecting a central reference point called origin
– A vector indicates which is the direction to follow from origin and the path length to reach the point
• Notation: row or column – Ex.: the vector pointing to the center of
the car
• We will use column notation and transformation matrices will be pre-multiplied
X
Y
(2,3)(10,2)
(8,7.5)
⎥⎦
⎤⎢⎣
⎡2
10[ ]210

Tema 3. Transformaciones 2D 6Computer Graphics Chapter 3. 2D Transformations 6
3.1 Introduction
• Vectors are used in computer graphics to:– Represent vertices positions– Determine a surface orientation
• Surface normal vector– Model light interaction
• Light vector
L
N
θγ
L’
N

Tema 3. Transformaciones 2D 7Computer Graphics Chapter 3. 2D Transformations 7
3.1 Introduction
Sum of vectors
X
Y
P
P’
P+P’Y
X
⎥⎦
⎤⎢⎣
⎡=
32
P
⎥⎦
⎤⎢⎣
⎡=
24
P'
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡=+=
56
24
32
P'P'P'

Tema 3. Transformaciones 2D 8Computer Graphics Chapter 3. 2D Transformations 8
3.1 Introduction
• Product by a scalar• Linear dependency
– Two vector are linearly dependents when one is multiple of the other
X
Y
-P
2P
P
αPY
X
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
23
yx
P
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⋅⋅
=⎥⎦
⎤⎢⎣
⎡=
46
2232
2y2x
P2

Tema 3. Transformaciones 2D 9Computer Graphics Chapter 3. 2D Transformations 9
3.1 Introduction
• Base vectors of the plane– The unit vectors (of length 1) in x and y axes are called standard base vectors of
the plane– The collection of all the scalar multiples of [1 0] give us the first coordinate axis– The collection of all the scalar multiples of [0 1] give us the second coordinate
axis• Non-orthogonal base vectors
– Can we get any [n m] vector as a combination of two arbitrary vectors [a b] and [c d]?
– It is always possible to find α and β meanwhile [a b] and [c d] do not be linearly dependents
⎥⎦
⎤⎢⎣
⎡⋅+⋅⋅+⋅
=⎥⎦
⎤⎢⎣
⎡⋅+⎥
⎦
⎤⎢⎣
⎡⋅=⎥
⎦
⎤⎢⎣
⎡dbca
ba
mn
βαβα
βαdc

Tema 3. Transformaciones 2D 10Computer Graphics Chapter 3. 2D Transformations 10
3.1 Introduction
• Algebraic properties of vectors:– Commutative
• P + Q = Q + P– Associative
• (P + Q) + R = P + (Q + R)– Identity (sum)
• There is a vector 0 / (P+0)=(0+P)=P for all P
– Reverse• For any P exists a vector
-P / P + (-P) = 0
– Distributive (vector):• r (P+Q)=rP+rQ
– Distributic (scalar):• (r + s)P=rP+sP
– Associative (scalar): • r(sP)=(rs)P
– Identity (product): • For the real number 1,
1P=P for all P

Tema 3. Transformaciones 2D 11Computer Graphics Chapter 3. 2D Transformations 11
3.1 Introduction
• Dot product of two vectors– The result is a scalar– Defines the length of a vector
(P*P)=x2 + y2 is the square of the length
– Allows to normalize vectors• The norm of a vector is its length• The vector is unitary if |P|=1• To normalize: P/|P|
– Measures the angles between two vectors
• If P and P’ are different of 0 then P*P’ = |P||P’|cos(θ−φ)
P
P’θ
φ
(θ−φ)
|P|sinθ
|P|cosθ
P
y'yx'xy'x'
yx
P'P ⋅+⋅=⎥⎦
⎤⎢⎣
⎡•⎥⎦
⎤⎢⎣
⎡=•
PPP •=+
Tema 3. Transformaciones 2D 12Computer Graphics Chapter 3. 2D Transformations 12
3.1 Introduction
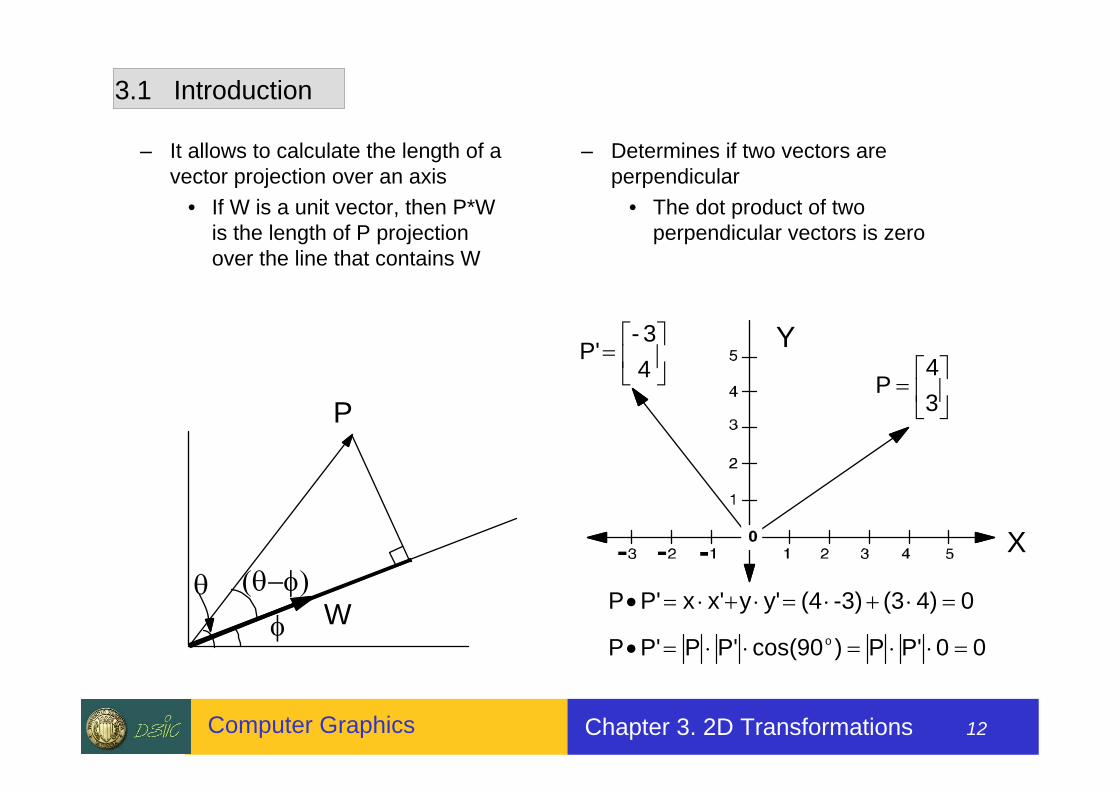
– It allows to calculate the length of a vector projection over an axis
• If W is a unit vector, then P*W is the length of P projection over the line that contains W
– Determines if two vectors are perpendicular
• The dot product of two perpendicular vectors is zero
P
Wθ
φ
(θ−φ)
⎥⎦
⎤⎢⎣
⎡=
43-
P'
⎥⎦
⎤⎢⎣
⎡=
34
P
Y
X
04)(3-3)(4y'yx'xP'P =⋅+⋅=⋅+⋅=•
00P'P)cos(90P'PP'P o =⋅⋅=⋅⋅=•

Tema 3. Transformaciones 2D 13Computer Graphics Chapter 3. 2D Transformations 13
3.1 Introduction
• Cross product– The result is a vector (orthogonal to the
two input vectors)– Measures the angle between two vectors
• If P and P’ are different to 0 then |PxP’|= |P||P’|sen(θ−φ)
– Allows to calculate the point-to-line distance
• If W is a unit vector, then |PxW| is the distance from P to the line that contains W
– Determine is two vectors are parallel• The cross product modulus of two
parallel vectors is 0
z'y'x'zyxkji
P'P
→→→
=×
P
P’θφ
(θ−φ)
P
Wθ
φ(θ−φ)

Tema 3. Transformaciones 2D 14Computer Graphics Chapter 3. 2D Transformations 14
3.2 2D Transformations
• 2D Points: as column vectors
• Transformations: square matrices that pre-multiply the vector
• In case of considering the points as row columns, we will use the transpose matrices (and post-multiplications)

Tema 3. Transformaciones 2D 15Computer Graphics Chapter 3. 2D Transformations 15
3.2 2D Transformations
• Translation– To move an object from one position to another different
X’ = X + Tx; Y’ = Y + Ty;
P’ = P + T
• Delete primitives of current position• Sum shift to control points• Redraw primitives in the new position
PXY
PXY
TTT
x
y
=⎡
⎣⎢⎤
⎦⎥′ =
′′
⎡
⎣⎢
⎤
⎦⎥ =
⎡
⎣⎢
⎤
⎦⎥
Tema 3. Transformaciones 2D 16Computer Graphics Chapter 3. 2D Transformations 16
3.2 2D Transformations
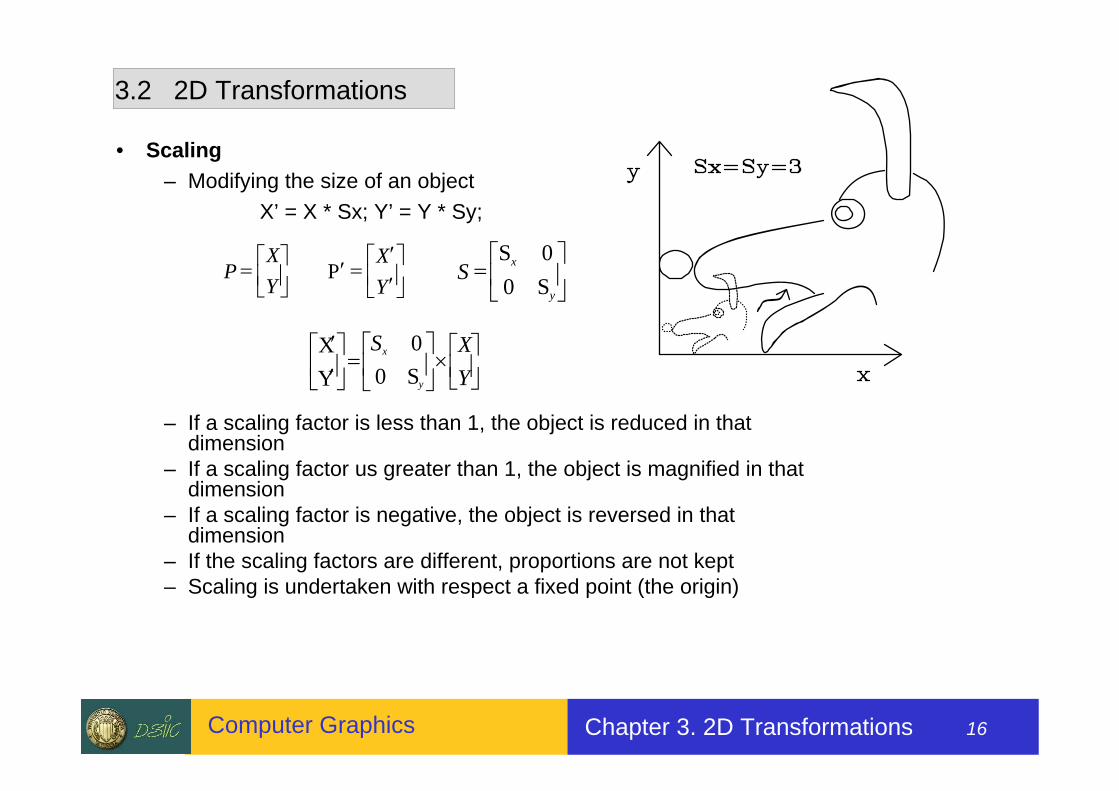
• Scaling– Modifying the size of an object
X’ = X * Sx; Y’ = Y * Sy;
– If a scaling factor is less than 1, the object is reduced in that dimension
– If a scaling factor us greater than 1, the object is magnified in that dimension
– If a scaling factor is negative, the object is reversed in that dimension
– If the scaling factors are different, proportions are not kept– Scaling is undertaken with respect a fixed point (the origin)
SS
Sx
y
=⎡
⎣⎢
⎤
⎦⎥
00
PXY
PXY
= ⎡⎣⎢⎤⎦⎥
′ =′′
⎡
⎣⎢⎤
⎦⎥
′′
⎡
⎣⎢⎤
⎦⎥=⎡
⎣⎢
⎤
⎦⎥×⎡⎣⎢⎤⎦⎥
XY
SS
XY
x
y
00

Tema 3. Transformaciones 2D 17Computer Graphics Chapter 3. 2D Transformations 17
3.2 2D Transformations
• Scaling

Tema 3. Transformaciones 2D 18Computer Graphics Chapter 3. 2D Transformations 18
3.2 2D Transformations
• Rotation– Rotation of a point with respect another one (in this case the origin)– If a point in polar coordinates (r, β) a rotation is applied:
X’ = r*cos(β+α) = r*(cos(β)*cos(α) - sen(β)*sen (α)) = (r*cos(β))*cos(α) - (r*sen(β))*sen (α) = X*cos(α) - Y*sen (α)
Y’ = r*sen(β+α) = r*(sen(β)*cos(α) + cos(β)*sen (α)) = (r*sen(β))*cos(α) - (r*cos(β))*sen (α) = Y*cos(α) + X*sen (α)
P’ = R * P
( )R =
−⎡
⎣⎢
⎤
⎦⎥
cos sen( )sen( ) cos( )
α αα αr
Tema 3. Transformaciones 2D 19Computer Graphics Chapter 3. 2D Transformations 19
3.3 Composing transformations
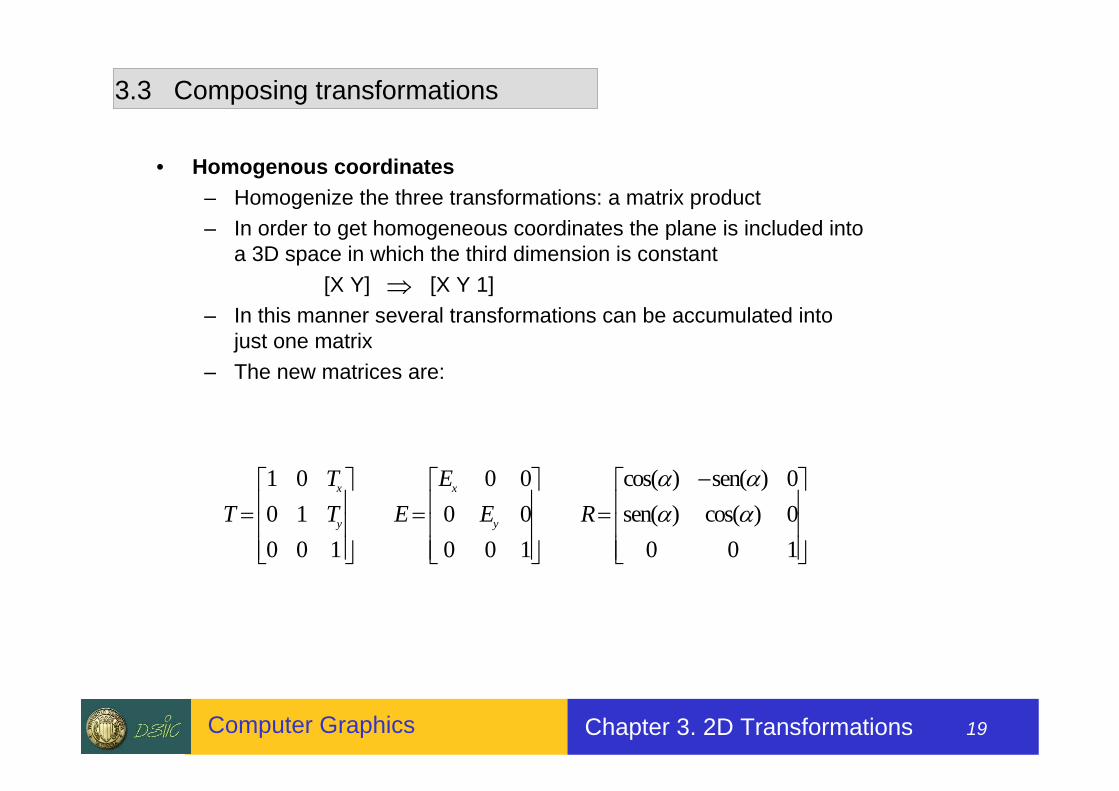
• Homogenous coordinates– Homogenize the three transformations: a matrix product– In order to get homogeneous coordinates the plane is included into
a 3D space in which the third dimension is constant[X Y] [X Y 1]
– In this manner several transformations can be accumulated into just one matrix
– The new matrices are:
⇒
TTT E
EE R
x
y
x
y=⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
=⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
=−⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
1 00 10 0 1
0 00 00 0 1
00
0 0 1
cos( ) sen( )sen( ) cos( )
α αα α
Tema 3. Transformaciones 2D 20Computer Graphics Chapter 3. 2D Transformations 20
3.3 Composing transformations
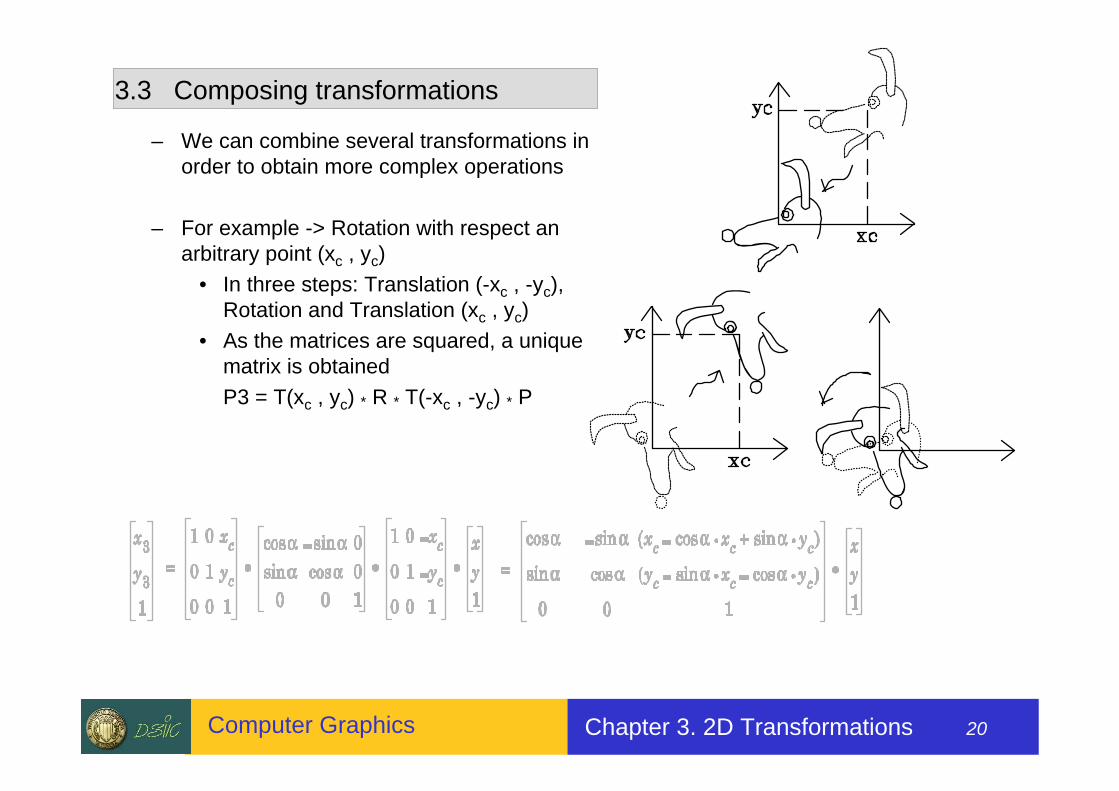
– We can combine several transformations in order to obtain more complex operations
– For example -> Rotation with respect an arbitrary point (xc , yc)
• In three steps: Translation (-xc , -yc), Rotation and Translation (xc , yc)
• As the matrices are squared, a unique matrix is obtainedP3 = T(xc , yc) * R * T(-xc , -yc) * P

Tema 3. Transformaciones 2D 21Computer Graphics Chapter 3. 2D Transformations 21
3.3 Composing transformations
• Order of transformations– The matrix product is not commutative
M1*M2<>M2*M1– Transformations either– Transformations that are commutative
• Translation-Translation• Scaling-Scaling• Rotation-Rotation• Proportional scaling-Rotation
– Non-commutative transformations• Translation-Scaling• Traslation-Rotation• Non-proportional scaling-Rotation
Translation after rotation
Rotation after translation

Tema 3. Transformaciones 2D 22Computer Graphics Chapter 3. 2D Transformations 22
3.4 Geometric transformations around a point
• Complex operations are divided into more simple ones
• Traslation: Translation does not depend on a reference point
• Scaling: Scaling around a reference point (x,y)– Translating the object (-x,-y)– Scaling– Undo translation
• Rotation: Rotations around a center of rotation (CR)– Translating the object(-CR)– Rotation– Undo translation

Tema 3. Transformaciones 2D 23Computer Graphics Chapter 3. 2D Transformations 23
3.5 Coordinate system transformations
• Real world coordinate system (RWC)– Description of real physic system– Metric units depend on the representation– They have to be converted into device metrics (mapping)– The mapping is composed by a scaling and a shift
• Device coordinate system (DC)– Depends on the device
• Screen size, in pixels• Where the origin is• Positive direction of each coordinate
• Normalized device coordinate system (NDC)– In order to carry out a normalized mapping, a ficticious device of
width and height 1 is used

Tema 3. Transformaciones 2D 24Computer Graphics Chapter 3. 2D Transformations 24
• How can we go from a coordinate system to another in the most efficient and normalized way
• An area of the real world is defined: window• An area of the device is defined: viewport
– The viewport size goes from a pixel to all the screen– What it is outside the windows goes outside the
viewport• The coordinate transformation from RWC to DC is
carried out into two steps:– From RWC to NCD
• Normalized transformation– From NCD to DC
• Device transformation
Real world coordinates
Normalized coordinate system
windows
viewport
3.5 Coordinate system transformations

Tema 3. Transformaciones 2D 25Computer Graphics Chapter 3. 2D Transformations 25
• Window-viewport transformation:– Windows bottom-left corner is moved to origin– Scaling factor are applied in order to force window
an viewport identical sizes– Origin is translated to viewport bottom-left corner
vxmax
vymin
vymax
vxmin
Viewport
wymax
wymin
wxmin wxmax
Window
Real world coordinates
Normalized device coordinates
3.5 Coordinate system transformations

Tema 3. Transformaciones 2D 26Computer Graphics Chapter 3. 2D Transformations 26
• NDC to DC is similar to the previous one• In general, windows and viewports are rectangular• Types of transformations between systems:
• Isotropic (keeping proportions, 1 scaling factor) or anisotropic (2 scaling factors). To achieve the isotropic, viewport definition has to be proportional to the window
ISOTROPIC
ANISOTROPIC
Viewport
With clipping
Without clipping
Window
3.5 Coordinate system transformations