compact low power avionics for the europa lander … · two step approach • step 1: advanced...
TRANSCRIPT

February 30, 2018
© 2018 California Institute of Technology. Government sponsorship acknowledged.Pre-Decisional Information -- For Planning and Discussion Purposes Only
Compact Low Power Avionics for the Europa Lander Concept
and Other Missions to Ocean Worlds
Gary Bolotin, Donald Hunter, Doug Sheldon, Yutao He, David Foor Jet Propulsion Laboratory, California Institute of Technology
4800 Oak Grove Dr.Pasadena, CA 91109
[email protected], [email protected], [email protected], David [email protected]

Two Step Approach• Step 1: Advanced packaging – Mass, Volume & Power
Savings• Europa Lander Project Baseline
• Step 2: Cold survivable electronics – Harness mass savings, along with power saving for heating
100mm x 160mm x 74mm
© 2018 California Institute of Technology. Government sponsorship acknowledged.Pre-Decisional Information -- For Planning and Discussion Purposes Only
Reduce electronics mass/volumeEuropa Lander Baseline
MSL Motor ControllerReduce harness complexity and mass
NASA: COLDTECH
Actuator
Actuator
Actuator
Actuator
Actuator
ActuatorWarm Electronics Box (WEB)
Flight Computer
Distributed Controller
Distributed Controller
Distributed Controller
Distributed Controller
Distributed Controller
Distributed Controller
Motor Interface Card
Focus of our work
Step 2Step 1
Our motor control approach:Step 1 reduce electronics volume 10x
Step 2 reduce cable mass and comlexity
2
Step 1
Advanced packaging – Electronics Mass & Volume Savings
3

Advanced Packaging and Electronics Technologies
Leverage advanced packaging, cold capable electronics and system on a chip technology to maximize the science return from the baseline Europa Lander.
© 2018 California Institute of Technology. Government sponsorship acknowledged. 4
Chip On Board Technology
Enables a >10X improvement in board density
Slice Based Design
Eliminates backplane and chassis mass
Allows for a single board command and data handling system
Cold Capable ElectronicsConductive Epoxy
Allows for -200C survival temperatures
Advanced Electronic PackagingHigh Density Connectors
Up to 500 pins per connector3x density of standard micro-D
System On A ChipSingle Chip Computer Single Chip Telemetry Collection
Advanced packaging, methods and electronic technology enable us to meet our volume, mass and power reduction goals

Centralized DesignEuropa Lander Concept Baseline
5
• A 10x reduction in volume compared to conventional electronics• 300Krad tolerant• Control of 12 3A brushless DC motors• Cobham Aeroflex dual core processor as the motor control
processor• Finer measurement and control of currents compared to MSL
Lander ComputerComputer Card
Telemetry Card
Motor Control Card
Power Conversion Card
Power Distribution
Primary Battery
Motor Control CardMotor Control CardMotor Control Card
SP
I
Mot
or I/
F B
us
Pow
er D
istri
butio
n B
us –
Prim
ary
Gnd
ref
Pow
er D
istri
butio
n B
us -
Sec
onda
ry G
nd re
f
Pow
er I/
F B
us
Power Distribution
© 2018 California Institute of Technology. Government sponsorship acknowledged.
A Complete Motor Control solution in a 100mm x 160mm x 74mm enclosure

Motor Control Card
6© 2018 California Institute of Technology. Government sponsorship acknowledged.
A Single 10cm x 16cm card controlling 3 motors

Motor Control Card ModuleStatus
7© 2018 California Institute of Technology. Government sponsorship acknowledged.
The modules needed for motor control leverage existing and current funding sources

Resolver Module 1 of 2
8
• Resolvers are used to measure position of actuators• Single provides interface to 3 resolvers
Conventional Packaging
Advanced Multi-Chip Module
Packaging
© 2018 California Institute of Technology. Government sponsorship acknowledged.
This module is an example of how we achieve a 10x reduction in volume over conventional packaging

Resolver Module 2 of 2
9
• Device contains 3 excitation die, 3 analog to digital converters, 36 diodes and numerous discrete devices
© 2018 California Institute of Technology. Government sponsorship acknowledged.
Advanced packaging enables our high density motor control card.

Manx: Low Power Computer
10© 2018 California Institute of Technology. Government sponsorship acknowledged.
A 10cm x 10cm single board command and data handling systemA 10cm x 10cm single board command and data handling system

Step 2
Cold survivable electronics –Harness mass savings, along with
power saving for heating
11

F
The Problem We Are Trying to Solve• Conventional practice is to house actuator electronics in a
protected, centralized, warm electronics box (WEB), requiring highly complex, point-to-point wiring to connect the drive and control electronics to the actuators and instruments, usually located at the system appendages.
MSL Wiring Harness Integration and Test MSL’s Robotic Arm
Illustration of cabling mass and complexity in current landed mission architectures across all subsystems and phases of development.
Harness Mass Harness Complexity Harness rigidity
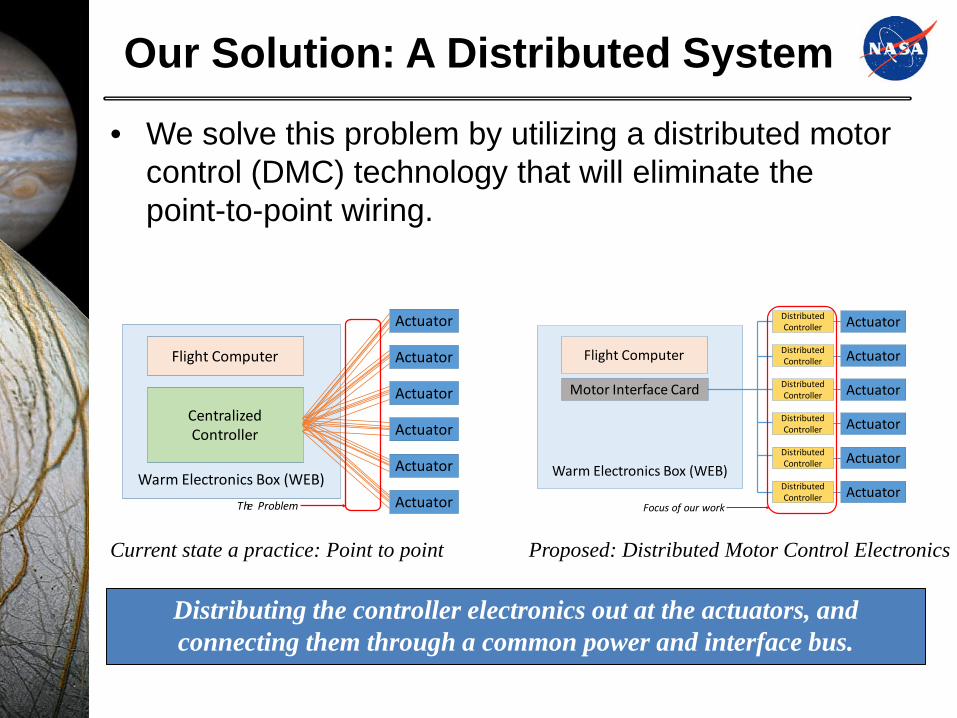
Our Solution: A Distributed System
• We solve this problem by utilizing a distributed motor control (DMC) technology that will eliminate the point-to-point wiring.
Current state a practice: Point to point Proposed: Distributed Motor Control Electronics
Distributing the controller electronics out at the actuators, and connecting them through a common power and interface bus.
Actuator
Actuator
Actuator
Actuator
Actuator
ActuatorWarm Electronics Box (WEB)
Centralized Controller
Flight Computer
The Problem
Actuator
Actuator
Actuator
Actuator
Actuator
ActuatorWarm Electronics Box (WEB)
Flight Computer
Distributed Controller
Distributed Controller
Distributed Controller
Distributed Controller
Distributed Controller
Distributed Controller
Motor Interface Card
Focus of our work

Cold Capable Electronics• Work in the area of cold cable electronics consists of three
major thrust areas. – The first is cryogenic testing of key components. – The second area is thermal cycle testing of packages
representative of the type of packages proposed for the Europa Lander.
– The third area is a recommendation of design rules for cryogenic temperature cycles.
• The goal is to survive 33+ cycles from -190C to +85C.• Preliminary test results are positive
– We tested a single resolver and motor driver module through 100 cycles. Both devices have passed functional tests post exposure.
– Daisy chain test using SN63 (standard JPL solder) with and w/o underfill'spassed 100 thermal cycles from -190C to +85C
© 2018 California Institute of Technology. Government sponsorship acknowledged.
Our design rules and packaging methods for cold survivability are applicable to any electronics outside of the warm electronics box.
Such as instruments and cameras.

jpl.nasa.gov
© 2018 California Institute of Technology. Government sponsorship acknowledged.