connected autonomous ehicle control optimization …
TRANSCRIPT
CONNECTED AUTONOMOUS VEHICLE
CONTROL OPTIMIZATION AT
INTERSECTIONS
Guohui Zhang
University of New Mexico
Department of Civil Engineering
December 11, 2015
CONTENT
Background Information
Connected Autonomous Vehicle System Operation
Autonomous Intersection Control Optimization
Interoperable Arterial Management
Summary
From: Google
3
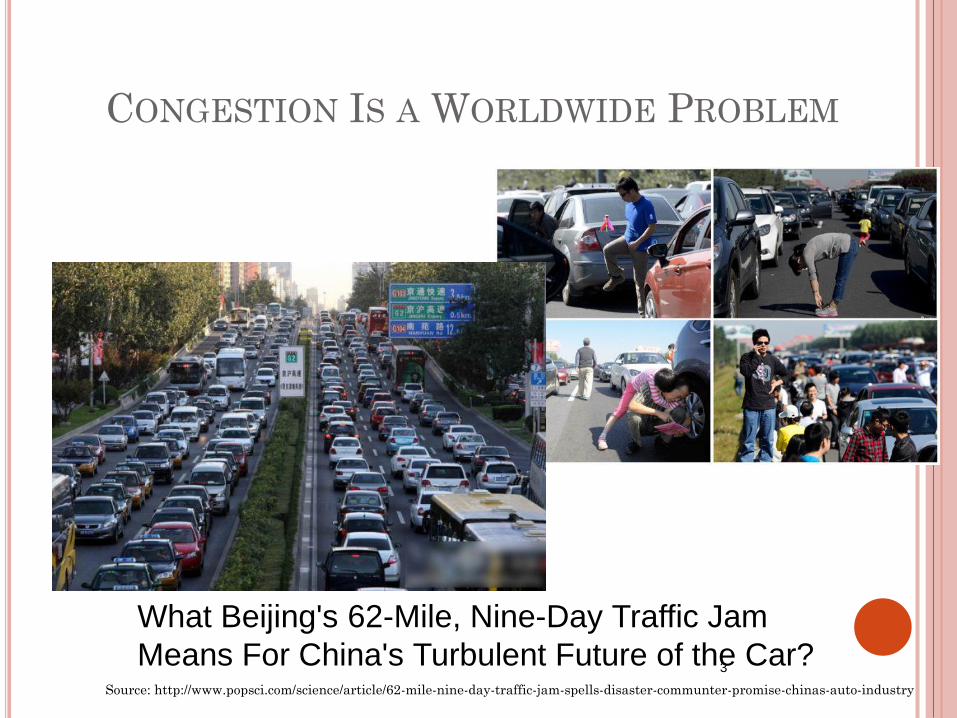
CONGESTION IS A WORLDWIDE PROBLEM
What Beijing's 62-Mile, Nine-Day Traffic Jam
Means For China's Turbulent Future of the Car? Source: http://www.popsci.com/science/article/62-mile-nine-day-traffic-jam-spells-disaster-communter-promise-chinas-auto-industry

CONGESTION IS A WORLDWIDE PROBLEM
Traffic congestion in
Albuquerque at 5 pm.
Delays at intersections
Account for 15% to 30% of all
traffic delays
295 million vehicle-hours of
delay on major roadways
Traffic Volume Map in Albuquerque at 5 pm
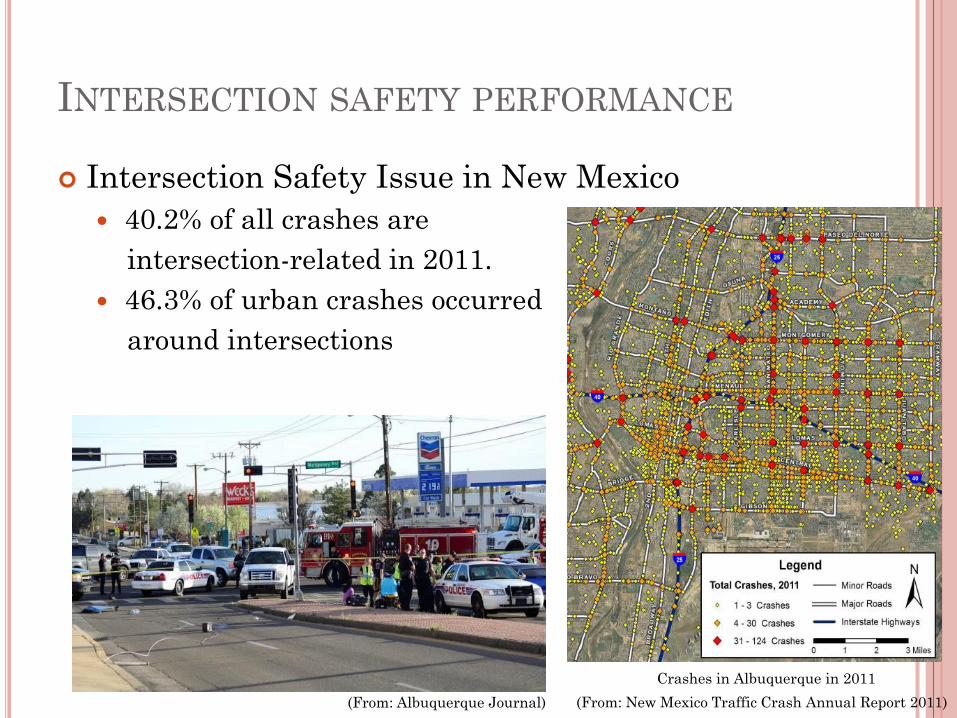
INTERSECTION SAFETY PERFORMANCE
Intersection Safety Issue in New Mexico
40.2% of all crashes are
intersection-related in 2011.
46.3% of urban crashes occurred
around intersections
(From: Albuquerque Journal) (From: New Mexico Traffic Crash Annual Report 2011)
Crashes in Albuquerque in 2011
INTERSECTION SAFETY PERFORMANCE
Intersection Safety Issues
90% roadway crashes are caused by human errors
Fail to yield right of way
Passed stop sign
Disregarded traffic signal
Use cellphone
Driver Fatigue
Alcohol involved, etc.
From: Google
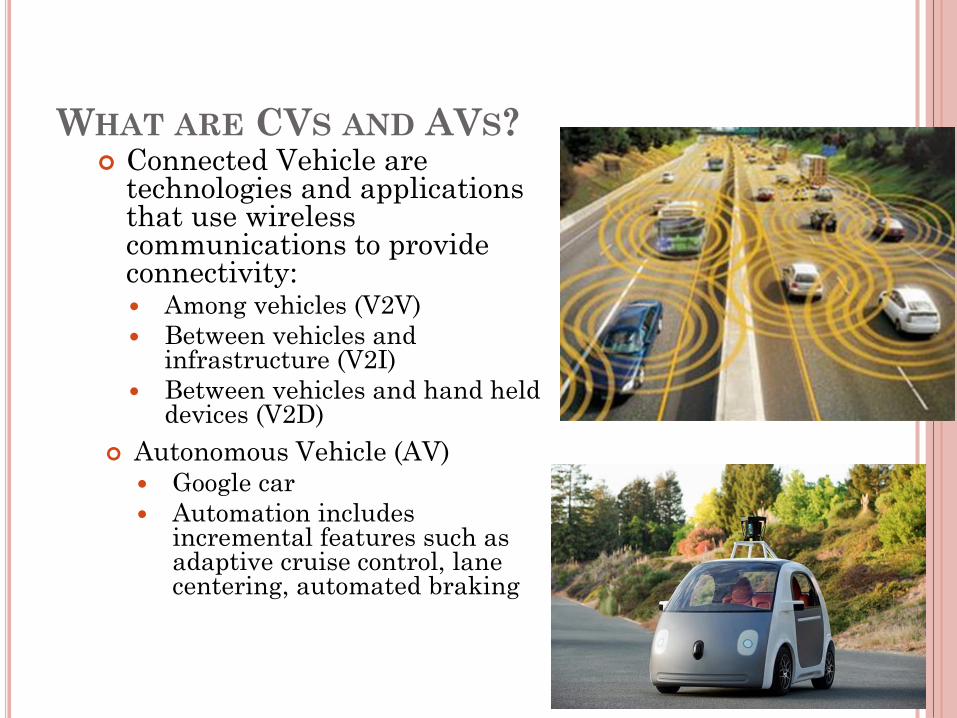
WHAT ARE CVS AND AVS? Connected Vehicle are
technologies and applications that use wireless communications to provide connectivity: Among vehicles (V2V)
Between vehicles and infrastructure (V2I)
Between vehicles and hand held devices (V2D)
Autonomous Vehicle (AV) Google car
Automation includes incremental features such as adaptive cruise control, lane centering, automated braking
CAV-ENABLED TRAFFIC OPERATIONS
Autonomous Vehicle
Also known as a driverless vehicle, self-driving
vehicle and robotic vehicle
Capable of sensing its environment and navigating
without human input
According to the U.S. Department of Transportation
(USDOT) Research and Innovative Technology
Administration (RITA), 81% of all vehicle-involved
crashes can be avoided or mitigated based on
connected vehicle technologies. navigating without
human input
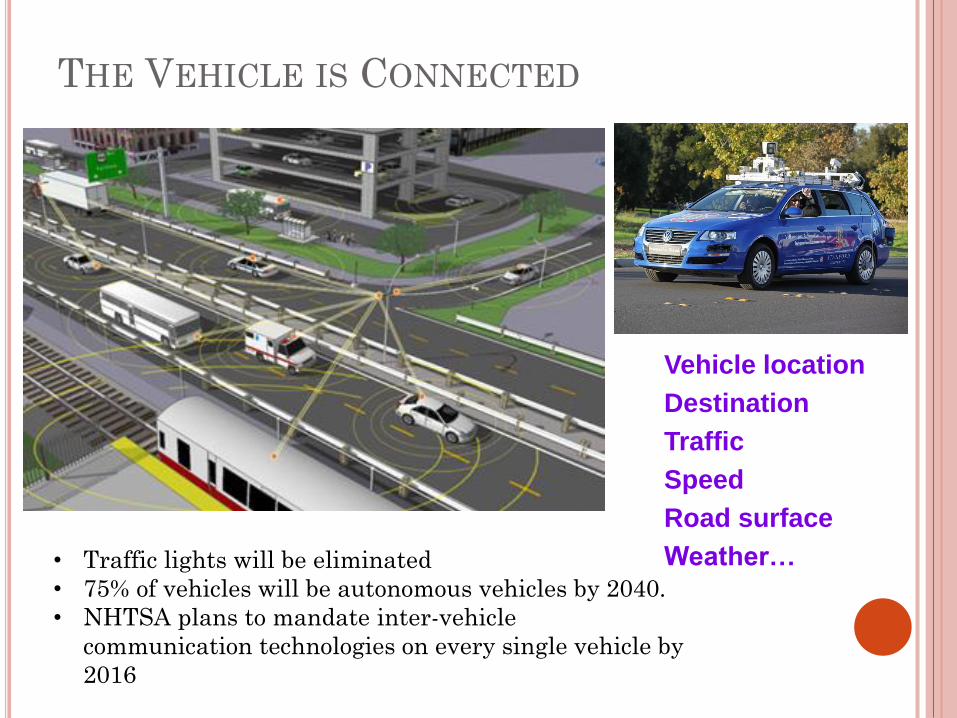
THE VEHICLE IS CONNECTED
Vehicle location
Destination
Traffic
Speed
Road surface
Weather…• Traffic lights will be eliminated
• 75% of vehicles will be autonomous vehicles by 2040.
• NHTSA plans to mandate inter-vehicle
communication technologies on every single vehicle by
2016
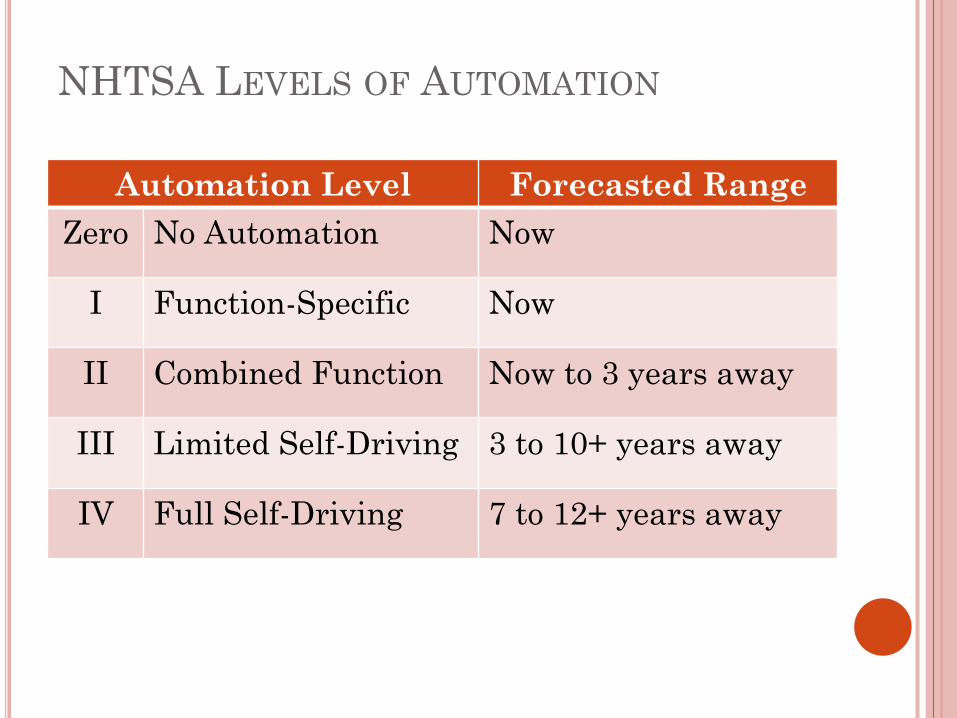
NHTSA LEVELS OF AUTOMATION
Automation Level Forecasted Range
Zero No Automation Now
I Function-Specific Now
II Combined Function Now to 3 years away
III Limited Self-Driving 3 to 10+ years away
IV Full Self-Driving 7 to 12+ years away
RESEARCH OBJECTIVES
Research Objectives
Innovative autonomous intersection control mechanism
Optimize autonomous vehicle operations at intersection
without signal control
Increase Intersection Capacity
Reduce Traffic Delay at intersection
Improve safety performance of intersections
Interoperable arterial management
From: USDOT
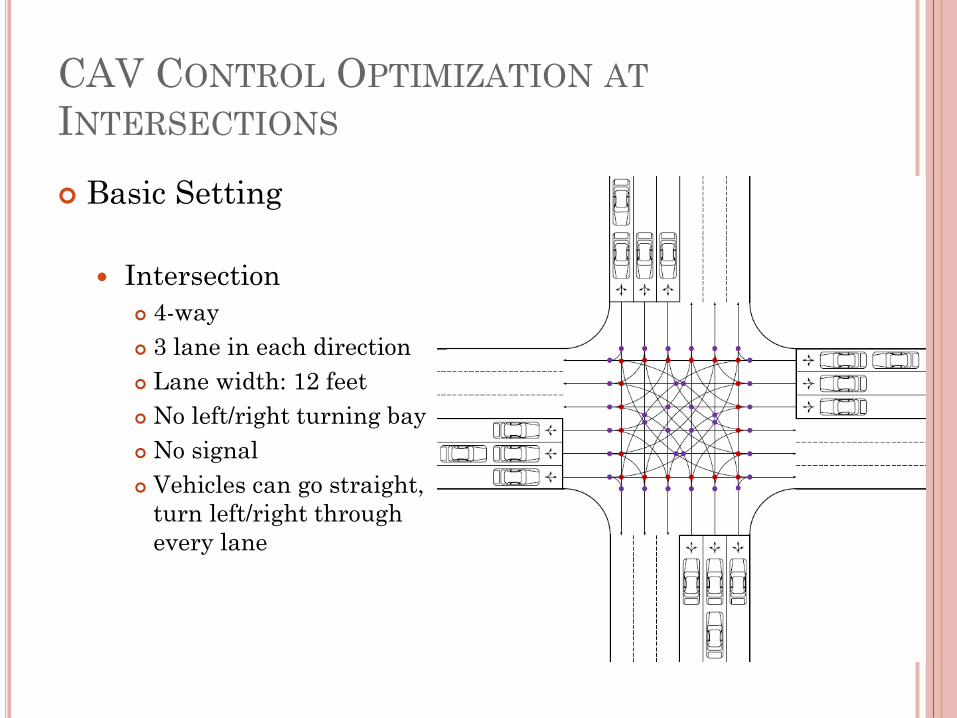
CAV CONTROL OPTIMIZATION AT
INTERSECTIONS
Basic Setting
Intersection
4-way
3 lane in each direction
Lane width: 12 feet
No left/right turning bay
No signal
Vehicles can go straight,
turn left/right through
every lane
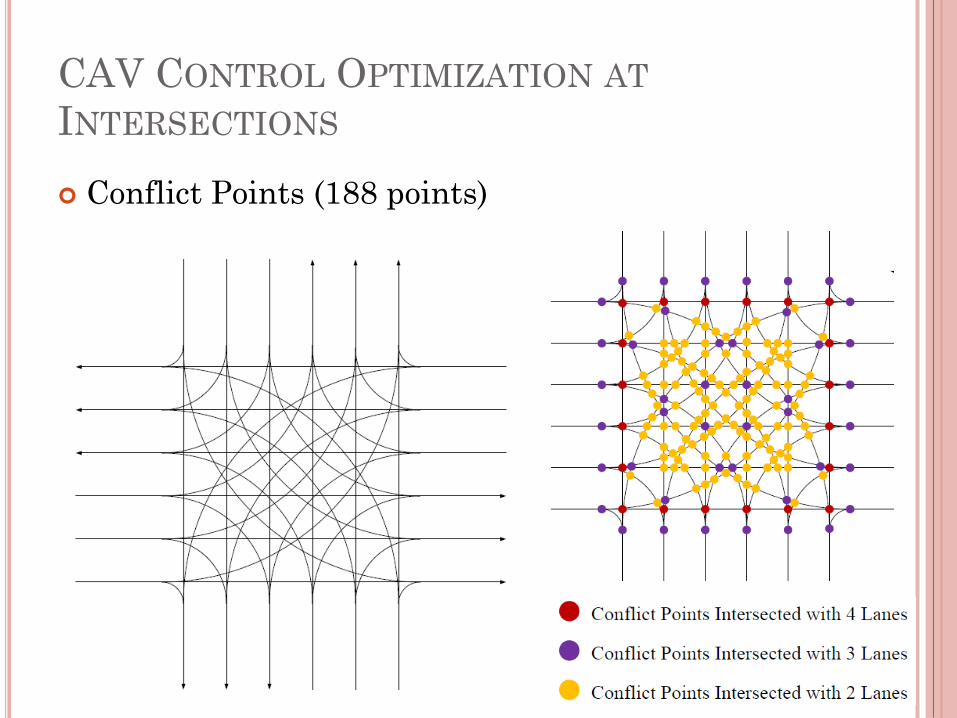
CAV CONTROL OPTIMIZATION AT
INTERSECTIONS
Conflict Points (188 points)
CAV CONTROL OPTIMIZATION AT
INTERSECTIONS
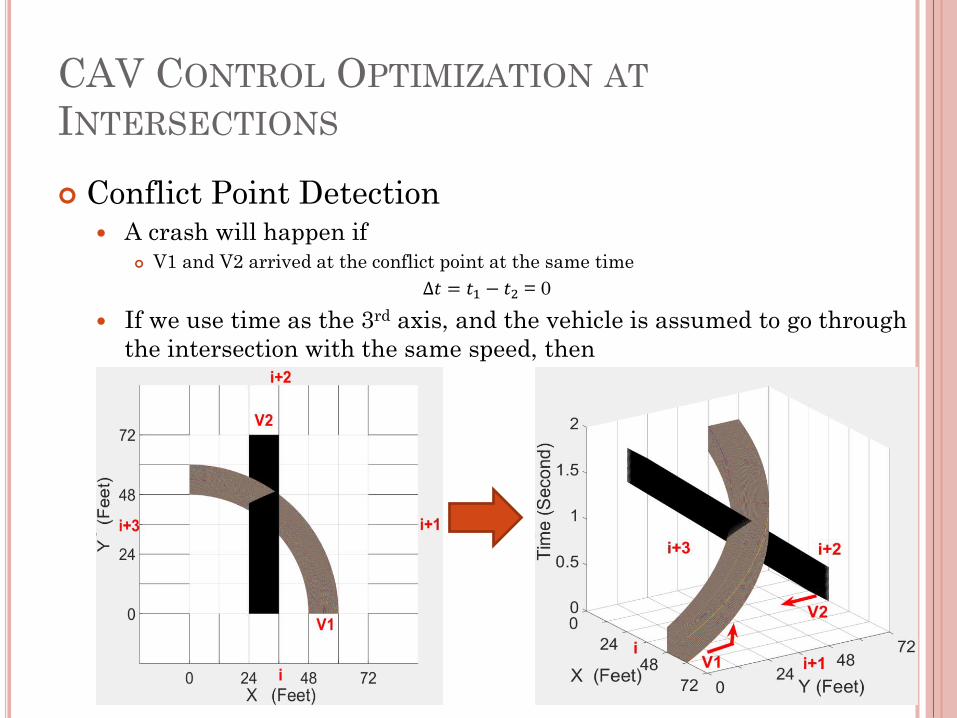
Conflict Point Detection A crash will happen if
V1 and V2 arrived at the conflict point at the same time
∆𝑡 = 𝑡1 − 𝑡2 = 0
If we use time as the 3rd axis, and the vehicle is assumed to go through
the intersection with the same speed, then
CAV CONTROL OPTIMIZATION AT
INTERSECTIONS
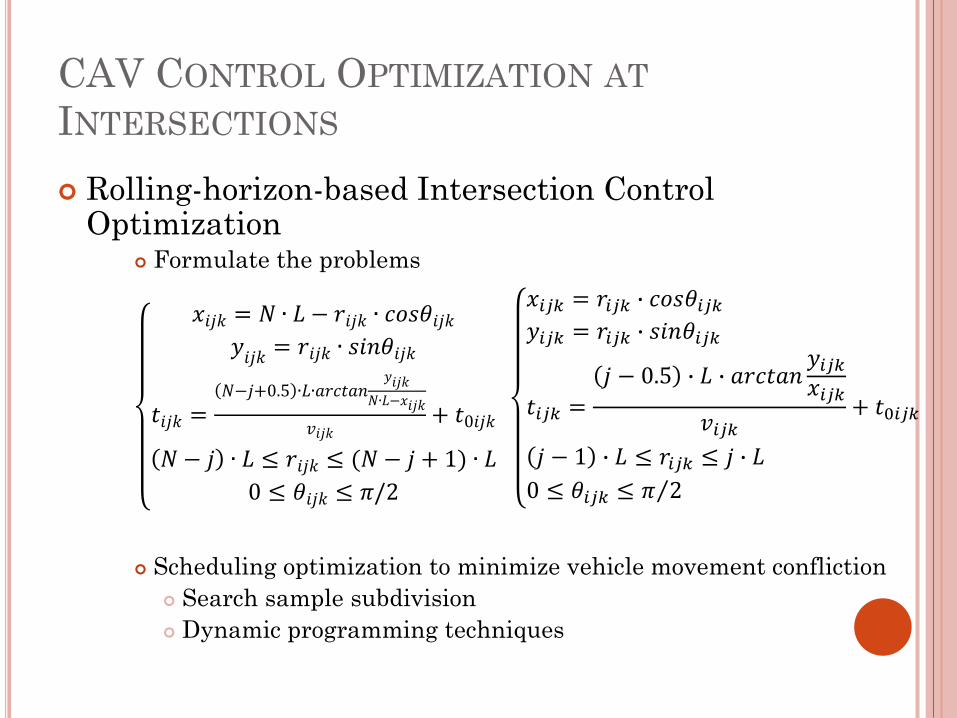
Rolling-horizon-based Intersection Control Optimization
Formulate the problems
𝑥𝑖𝑗𝑘 = 𝑁 ∙ 𝐿 − 𝑟𝑖𝑗𝑘 ∙ 𝑐𝑜𝑠𝜃𝑖𝑗𝑘𝑦𝑖𝑗𝑘 = 𝑟𝑖𝑗𝑘 ∙ 𝑠𝑖𝑛𝜃𝑖𝑗𝑘
𝑡𝑖𝑗𝑘 =𝑁−𝑗+0.5 ∙𝐿∙𝑎𝑟𝑐𝑡𝑎𝑛
𝑦𝑖𝑗𝑘
𝑁∙𝐿−𝑥𝑖𝑗𝑘
𝑣𝑖𝑗𝑘+ 𝑡0𝑖𝑗𝑘
𝑁− 𝑗 ∙ 𝐿 ≤ 𝑟𝑖𝑗𝑘 ≤ (𝑁 − 𝑗 + 1) ∙ 𝐿
0 ≤ 𝜃𝑖𝑗𝑘 ≤ 𝜋/2
Scheduling optimization to minimize vehicle movement confliction
Search sample subdivision
Dynamic programming techniques
𝑥𝑖𝑗𝑘 = 𝑟𝑖𝑗𝑘 ∙ 𝑐𝑜𝑠𝜃𝑖𝑗𝑘𝑦𝑖𝑗𝑘 = 𝑟𝑖𝑗𝑘 ∙ 𝑠𝑖𝑛𝜃𝑖𝑗𝑘
𝑡𝑖𝑗𝑘 =
𝑗 − 0.5 ∙ 𝐿 ∙ 𝑎𝑟𝑐𝑡𝑎𝑛𝑦𝑖𝑗𝑘𝑥𝑖𝑗𝑘
𝑣𝑖𝑗𝑘+ 𝑡0𝑖𝑗𝑘
𝑗 − 1 ∙ 𝐿 ≤ 𝑟𝑖𝑗𝑘 ≤ 𝑗 ∙ 𝐿
0 ≤ 𝜃𝑖𝑗𝑘 ≤ 𝜋 2
CAV CONTROL OPTIMIZATION AT
INTERSECTIONS
Intersection Control Protocol
Centralized intersection controller
Accept vehicle requests
Calculate and check conflict points among vehicles
Determine the passing sequence of all vehicles
Follow the principal: first come first serve
CAVs
Send requests
Follow the order of sequence to go through the intersection
SIMULATION
Simulation-based Analysis
Simulation-based investigation on traffic system operations
provides a cost-effective, risk-free means of
Exploring optimal management strategies,
Identifying potential problems,
Evaluating various alternatives.
From: Google
SIMULATION
Software--------PTV Vissim
PTV Vissim is a microscopic multi-
modal traffic flow simulation software
package developed by PTV Planung
Transport Verkehr AG in Karlsruhe,
Germany.
The name is derived from "Verkehr In
Städten - SIMulationsmodell" (German
for "Traffic in cities - simulation
model").
VISSIM was first developed in 1992
and is today a global market leader.
From: Google
SIMULATION
Simulation Video
SIMULATION
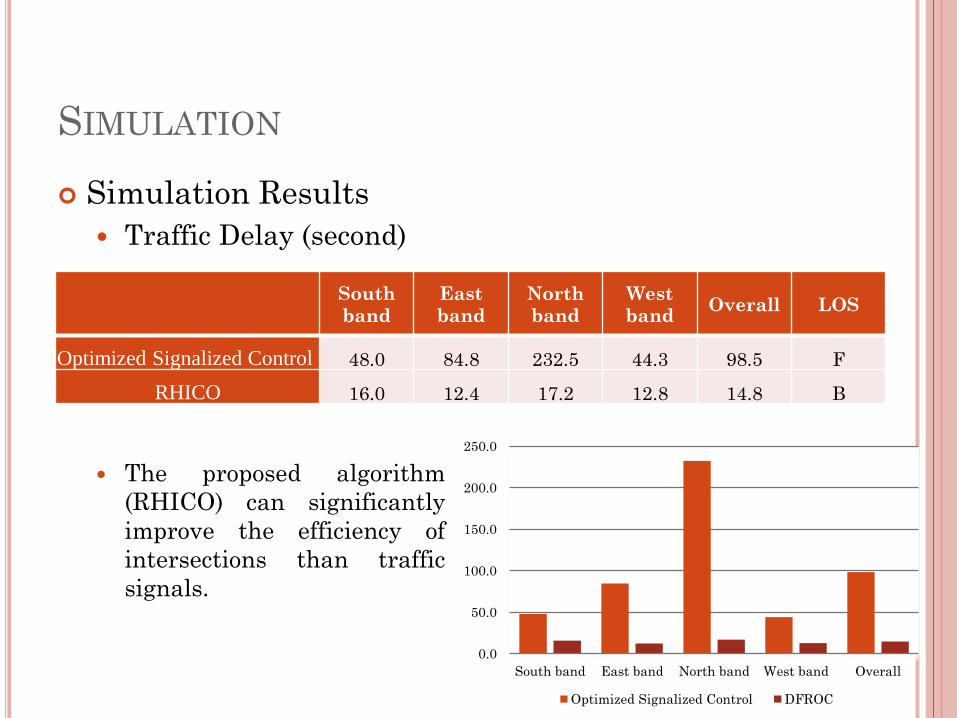
Simulation Results
Traffic Delay (second)
The proposed algorithm
(RHICO) can significantly
improve the efficiency of
intersections than traffic
signals.
South
band
East
band
North
band
West
bandOverall LOS
Optimized Signalized Control 48.0 84.8 232.5 44.3 98.5 F
RHICO 16.0 12.4 17.2 12.8 14.8 B
0.0
50.0
100.0
150.0
200.0
250.0
South band East band North band West band Overall
Optimized Signalized Control DFROC
MOBILITY UNDER CAV ENVIRONMENT ON
ARTERIALS
Arterial CAV Operation Strategy
Arterial traffic operation coordination
Dynamic routing
Speed harmonization
Transit priority signal control
Reversible lanes
Managed lane systems
Coordinated corridor management
SUMMARY ON KEY ISSUES
Autonomous Intersection and Arterial Management
Different types of vehicle: truck, bus, pickup, van, etc.
Different traffic scenarios: evaluate the performance
Allow acceleration / deceleration in the intersection
Advanced control coordination strategy optimization
Mixed traffic composition demand
Q & A