craig weber fall 2004 - information technologycsw24/academic/papers/weber-craig-me… · segment...
TRANSCRIPT
Craig Weber Fall 2004
MEM 800 Final Project
Vehicle Cab Displacement versus Suspension Spring Constants
Problem Statement:
It is desired to collect max displacement data for a vehicle suspension system. Selecting
damping coefficients and mass displacements allows the suspension system to be
analyzed by varying two separate spring constants. The desired end product is a surface
graph representing the max displacements such that the correct spring constant values can
be selected for an optimized design.
System Description:
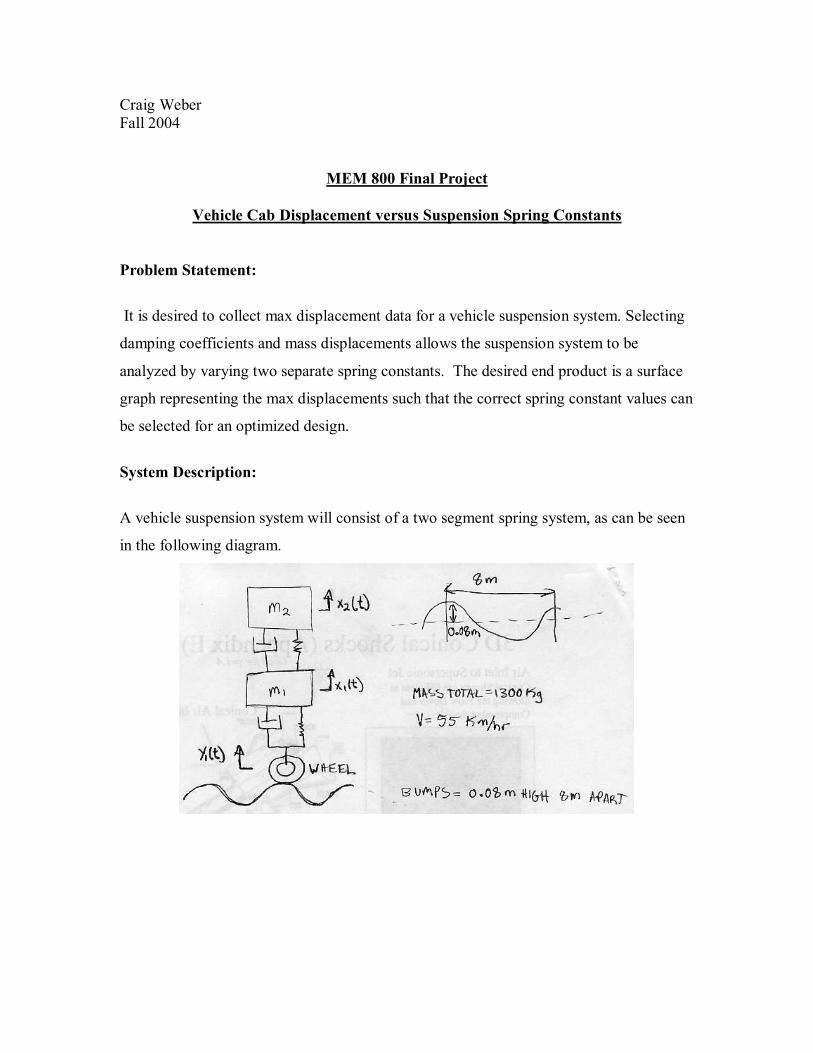
A vehicle suspension system will consist of a two segment spring system, as can be seen
in the following diagram.

The main cab will consist of seventy five percent of the overall vehicle mass and the sub-
carriage will consist of the remaining twenty five percent of the vehicle mass. Each
segment consists of its own mass, spring and damper. The two segments will be in series
creating the overall vehicle suspension system. With the following system values a full
analysis can be performed.
Known System Values
KgmVehicle 1300=
sKNmCficientDampingCoe 100)1( =
sKNmCficientDampingCoe 55)2( =
mKNK 30090 1 ≤≤
mKNK 255150 2 ≤≤
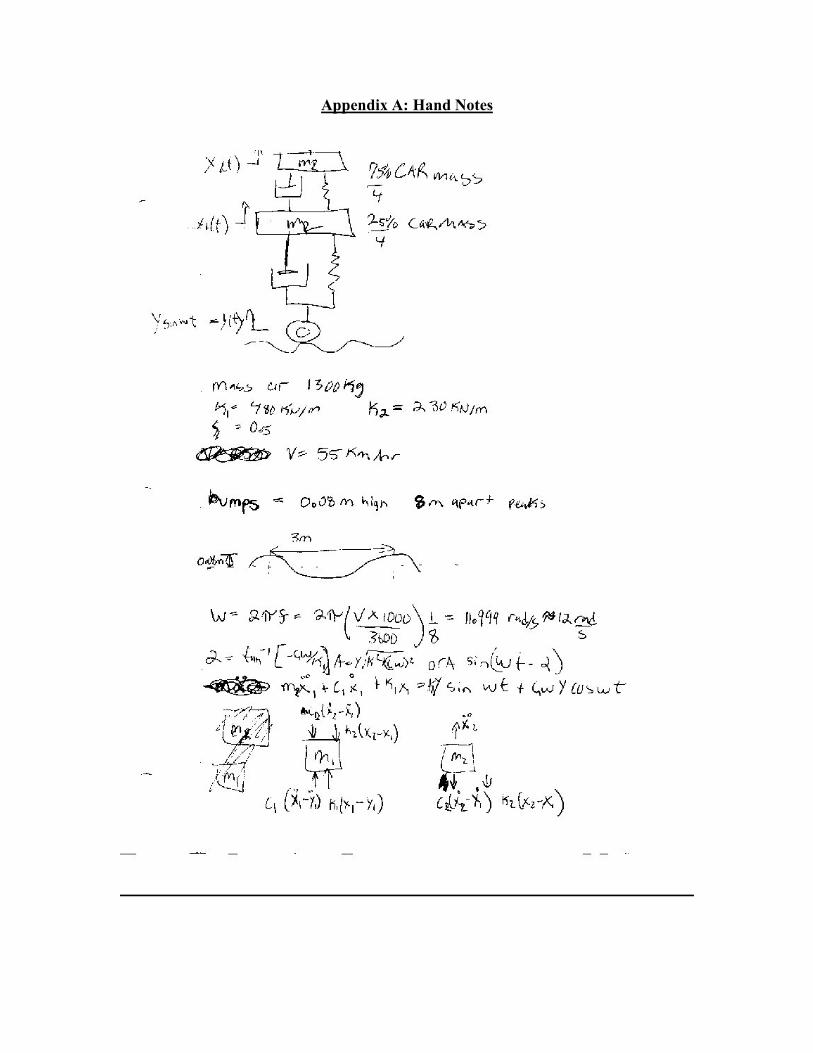
System Analysis and Equation Formulation:
From the above diagram free body theory was applied to formulate force balance
equations for each mass. These two equations were converted to a mechanical impedance
system (Rao 239,406). From this Forced Vibration Theory an equation for the
displacement of mass two has already been formed. All hand calculations and formulas
used can be located in appendix A.
MATLab Analysis: Upon completing the system analysis and equation formulation found in appendix A,
MATLab is used to simplify computation of the desired raw data. The most desirable use
of MATLab would be to formulate an M-file function designed to compute all
displacement values due to the varying spring constants. An M-file was started for this

computation but has not come to completion. All MATLab coding including M-file
design work can be found in appendix B.
Results: As previously stated the M-file design did not work so each calculation was
repeated by hand. Once the Z equations and their determinant equation were formulated a
combination of equations could just be copied and pasted back into MATLab while
varying k1 and k2. To obtain all desired values k1 was held constant and k2 was varied
through its range while recalculating each displacement. Once all k2 values were varied
while holding k1 constant k1 was then changed to its next value and the process was
repeated. From this process a data set was created in excel to graph the results.
150
180
210
240
90.00150.00
210.00270.00
0
0.002
0.004
0.006
0.008
0.01
Dsiplacement (m)
Spring 1 (KN/m)
Spring 2 (KN/m)
Vehicle Displacement Vs. Spring Coeficient
0.008-0.010.006-0.0080.004-0.0060.002-0.0040-0.002
This graph can now be used to choose the desired spring constant ranges for any set
displacement criteria. For most applications cab displacement of a car is not desired so

the smallest values on the graph would be used. The smallest displacement was found
with a spring constant combination of 255 and 300 KN/m. This Combination only
yielded a cab displacement of 0.0017 meters. However any range or acceptable
displacement value could be set and then the graphed could be utilized to make the spring
selections.
Future Potential Research
This current term did not afford enough time for an extensive cost analysis to be
conducted based on the initial findings of this computational analysis. However future
research of the overall system could be improved by adding a cost analysis. Ratios of
displacement versus increases in spring costs could be shown to give a better handle on
the design. To do so one would have to research the costs of similar springs and find the
cost versus spring constants. Then the displacements of the cab could be compared to the
cost of the required spring combination. This would be useful for anyone who not only
has to meet displacement criteria but must also meet cost criteria as well. Due to time
constraints I was only able to do a basic cost analysis based on linear spring costs. I found
the cost of several spring in the range of which I used to conduct this experiment and the
recorded their cost and lengths. To normalize the data set I divided each spring cost by a
common 4 inch length to get a cost per 4 inch unit value. Then the data was graphed and I
used a linearization to get the linear slope of the cost system. The following graph shows
this clearly.

Spring Cost Vs. Spring Rate y = 0.7375x + 5.1481R2 = 0.8945
0
24
68
10
12
575 637.5 697 831 1217 1228 1310
Spring Rate (Kn/m)
Sprin
g Co
st ($
)
Next I created a matrix consisting of the above slope multiplied by the summation of
each spring rate combination. This forms a total cost for the spring combination at each
location in the matrix. Finally the displacement matrix was divided by the cost matrix to
form the desired displacement versus cost ratios. This data was used to create the
following surface graph. Other related graphs can also be found in appendix C.
150
180
210
240
90
150
210
270
0.00E+00
5.00E-06
1.00E-05
1.50E-05
2.00E-05
2.50E-05
Ratio
Spring Constant 2
(Kn/m)Spring Constant 1
(Kn/m)
Displacement Vs. Spring Cost
Appendix A: Hand Notes





Appendix B: MATLab Code Solving for omega: >> syms Z Z11 Z12 Z21 Z22 g g1 k1 k2 r l l2 A w >> Z11=(-81.25*w^2)+(155*i*w)+(k1+k2) Z11 = -325/4*w^2+155*i*w+k1+k2 >> Z12=(-55*i*w)-k2 Z12 = -55*i*w-k2 >> Z21=(-243.75*w^2)-(55*i*w)-k2 Z21 = -975/4*w^2-55*i*w-k2 >> Z22=(55*i*w)+k2 Z22 = 55*i*w+k2 >> Z=[Z11 Z12;Z21 Z22] Z = [ -325/4*w^2+155*i*w+k1+k2, -55*i*w-k2] [ -975/4*w^2-55*i*w-k2, 55*i*w+k2] >> g=det(Z) g = -17875*i*w^3-325*w^2*k2-5500*w^2+100*i*w*k2+55*i*k1*w+k1*k2 >> k2=255 k2 = 255 >> k1=90 k1 = 90 >> g1=[(-17875*i) -(325*k2+5500) (45*i*k2 +55*i*k1*k2) (k1*k2^2-k2^2)] g1 = 1.0e+006 * 0 - 0.0179i -0.0884 0 + 1.2737i 5.7872 >> w=max(abs(roots(g1))) w = 8.3565

Solving for Displacement: >> Z11=(-81.25*w^2+155*i*w+(k1*k2)) Z11 = 1.7276e+004 +1.2953e+003i >> Z21=(-243.75*w^2-55*i*w-k2) Z21 = -1.7276e+004 -4.5961e+002i >> Z22=(55*i*w+k2) Z22 = 2.5500e+002 +4.5961e+002i >> Z12=(-55*i*w-k2) Z12 = -2.5500e+002 -4.5961e+002i >> A=.08*((k1^2+1200^2)^.5) A = 96.2696 >> l=(-Z12*A/(Z11*Z22-(Z12*Z12))) l = 0.0056 - 0.0003i >> abs(l) ans = 0.0056

M-file Data: function [X] = abs(l) k1=(linspace(90,300,30))' k2=(linspace(150,255,30))' d=[1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1;1] e=ones(1,30) e1=ones(30) o1=-17875*i*e1 p=325*k2+5500*d o2=[p p p p p p p p p p p p p p p p p p p p p p p p p p p p p p] u=45*i*k2+55*i*k1.*k2 o3=[u u u u u u u u u u u u u u u u u u u u u u u u u u u u u u] v=k1.*k2.*k2-k2.*k2 o4=[v v v v v v v v v v v v v v v v v v v v v v v v v v v v v v] g1=o1-o2+o3+o4 for j = 1:length(g1) w(j, :) = max(abs(roots(g1(j, :)))); end for l=1:length(w) Z11(l,:)=(((-81.25*w.*e).^2)+(155*i*w.*e)+(k1.*k2).*e) end for p=1:length(w) Z21(p,:)=((-243.75*(w.^2).*e)-(55*i*w).*e-k2.*e) end for s=1:length(w) Z22(s,:)=((55*i*w.*e)+k2.*e) end for v=1:length(w) Z12(v,:)=((-55*i*w.*e)-k2.*e) end for c=1:length(k1) f(l,:)=k1.*e end A=(0.08)*(((f.^2)+(1200^2*e)).^.5) l=((-Z12*A)/((Z11*Z22)-(Z12*Z12))) This M-file was created in an attempt to compute all values that were calculated by the
repetitive process mentioned earlier but with one function command. The file is
structured to calculate these values as if the equations were being applied to system of
equations located in a 30 by 30 matrix. My ability to write the MATLab code weakens as

I try to filter the 30 by 90 matrix g1 into a 30 by 30 matrix consisting of the max roots of
30 separate 2nd order polynomial vectors that are formed by the 30 by 90 matrix. (ie�
columns 1,30,60 of g1 would make up the first column of polynomial vectors and then
columns 2,31,61 would make up the second column of g1 etc� I have tried off and on
for several weeks but cannot write the code properly. None the less the desired
computations were able to be obtained the repetitive data entry way and therefore the M-
File no longer matters.

Appendix C: Graphs of Results
150
195
240
90.0
012
0.00
150.
0018
0.00
210.
0024
0.00
270.
0030
0.00
0
0.002
0.004
0.006
0.008
0.01
Dsiplacement (m)
Spring 1 (KN/m)
Spring 2 (KN/m)
Vehicle Displacement Vs. Spring Coeficient
0.008-0.010.006-0.0080.004-0.0060.002-0.0040-0.002
150 165 180 195 210 225 240 25590.00
120.00
150.00
180.00
210.00
240.00
270.00
300.00
Dsiplacement (m)
Spring 1 (KN/m)
Spring 2 (KN/m)
Vehicle Displacement Vs. Spring Coeficient
0.008-0.010.006-0.0080.004-0.0060.002-0.0040-0.002

150
180
210
240
90
150
210
270
0.00E+00
5.00E-06
1.00E-05
1.50E-05
2.00E-05
2.50E-05
Ratio
Spring Constant 2
(Kn/m)Spring Constant 1
(Kn/m)
Displacement Vs. Spring Cost
150 165 180 195 210 225 240 25590
120
150
180
210
240
270
300
Ratio
Spring Constant 2 (Kn/m)
Spring Constant 1 (Kn/m)
Displacement Vs. Spring Cost

References Battles, Zachary and Trefethen, Lloyd. �An Extension of MATLAB to Continuous Functions and Operators.� SIAM J. Sci. Comput Vol. 25 No. 5 (2004): 1743-1770. Gobbi, M., and Mastinu, G. �Analytical Description and Optimization of the Dynamic Behaviour of Passiveley Suspended Road Vehicles.� Journal of Sound and Vibration 254 (2001): 457-481 Hrovat, D., Tseng, T. �Some characteristics of optimal vehicle suspensions based on quarter-car models� Proceedings of the IEEE Conference on Decision and Control Vol. 4 (1990): 2232-2237 Rao, Singiresu. Mechanical Vibrations Fourth Edition New Jersey. Pearson Education, 2004