cse466 autumn ‘00 review card key access…see kathleen goforth mail archive…working on...
TRANSCRIPT

CSE466 Autumn ‘00
Review
Card Key Access…See Kathleen Goforth
Mail Archive…working on it…are you getting my messeges?
Why do we connect the speaker to 5V instead of ground?
Frequency range … what did you discover?
Debugger – shows you elapsed simulation time, can set watch variables, etc, etc. Learn more about the debugger!

CSE466 Autumn ‘00
Simple Princeton Architecture
ALUROMLinear
AddressSpace
W/ MemMapped
IO
PC SPGPRsIR
mux
Control
IR
I/O PortTimer, SFR’s
Status
Reset VectorInterrupt Vect
RAMaddress
data

CSE466 Autumn ‘00
Analysis
Bottleneck into and out of memory for data and code
Use of critical 8-bit address space (256) for memory mapped I/O and special function registers (timers and their controllers, interrupt controllers, serial port buffers, stack pointers, PC, etc). For example, the Motorola 6805 processor has only 187 RAM locations.
But, easy to program and debug. Compiler is simple too.

CSE466 Autumn ‘00
8051: Modified Harvard Architecture
ALU
PC
Internals
Control
Status
Reset VectorInterrupt VectInterrupt VectInterrupt Vect
RAM
SFR’s(direct)
UsuallyStack
(indirect)
Bit Addressable
Reg. Banks
addressmux
data
(indirect orDirect)
8051 standard +Enhancements
PSW – 2-bits bank sel.
4x8
instruction 3 bits reg sel ------------------ 5 bits of reg. addr
CSE466 Autumn ‘00
8051 Memory Architecture
Advantages Simultaneous access to Program and Data store Register banks great for avoiding context switching on interrupt and for
code compression 8-bit address space extended to 256+128 = 384 registers by
distinguishing between direct and indirect addressing for upper 128 bytes. Good for code compression
Bit addressable great for managing status flags
Disadvantage A little bit confusing, with potential for errors.

CSE466 Autumn ‘00
Segments control address space…same in C
NAME example
PROG SEGMENT CODECONST SEGMENT CODEVAR1 SEGMENT DATABITVAR SEGMENT BITSTACK SEGMENT IDATA
RSEG BITVAR ; relocatable segmentflag: DBIT 1 ; single bit variables
RSEG VAR1 ; relocatable segmentih: DS 1 ; integer i is two bytesil: DS 1
RSEG STACK ; relocatable segmentDS 10H ; 16 Bytes
CSEG AT 0 ; absolute segment JMP START ; Execution starts here on reset.
RSEG PROG ; relocatable segmentSTART: MOV SP,#STACK-1 ; first set Stack Pointer
MOV PSW,#00 ; use register bank O;rest of main program here
what would you add toinclude an interrupt routine?
CSEG AT 0BH<code>rti

CSE466 Autumn ‘00
Instruction Execution
6 States/Machine Cycle, 2 Osc. Cycles/State = 12 Cycles/Machine Cycle Most instructions are 1 machine cycle, some are 2 or more
Can make two ROM accesses in on memory cycle (two byte/one cycle instructions, such as ADD A,#10H. ALE – address latch enable, used when referencing external memory which can
happen twice per machine cycle. Its a Micro-coded CISC processor (sort of an old architecture) Interesting features
No Zero flag (test accumulator instead) Bit operations, Bit accessible RAM Read Modify Write operations (ports) Register to Register Moves Multiply and Divide operations (many 8-bit MCU’s don’t have these) Byte and Register Exchange operations Register banks Data pointer registers Addressing Modes (careful when using upper 128 bytes of RAM) BCD oriented instructions

CSE466 Autumn ‘00
Assembly Programming
Declare Segments and Segment types Segments define what address space you are in. Assembler converts to machine code, with relocatable segments. Linker perform absolute code location
Segments DATA -- Internal Data Address Space (0-7F direct or indirect) IDATA -- Indirect Data Address Space (80-FF for stack, arrays)
– Address is in R0 or R1 BIT – Bit addressable RAM space XDATA -- External Data Address Space CODE – Internal or external code space CONST – Internal or external code space
Example Assembly Program

CSE466 Autumn ‘00
Last Term’s Lab1
8051MCUAtmel89C55
+5V
P2
Resistor Pack
+5V
Value on DIP switch controls LED frequency
GND, VCC, XTAL, EA, Reset
P1.1

CSE466 Autumn ‘00
Anatomy of an Assembly Program
unsigned int i;
void main (void) { register unsigned int tmp; while (1) {
P1^= 0x01;i = 0;
do { tmp = i; i += P2;} while (tmp < i);
}}
Look for overflow in C – difficult to do
Note i is global and tmp is local. What happens to local variables?How are registers used? What happens in a subroutine call?

CSE466 Autumn ‘00
Compiled C
?C0001: XRL P1,#01HCLR AMOV i,AMOV i+01H,A
?C0005:MOV R7,i+01HMOV R6,iMOV R5,P2MOV A,R5ADD A,i+01HMOV i+01H,ACLR AADDC A,iMOV i,ACLR CMOV A,R7SUBB A,i+01HMOV A,R6SUBB A,iJC ?C0005SJMP ?C0001
But, here is the optimizedCompiled C
CSE466 Autumn ‘00
Now in Assembly
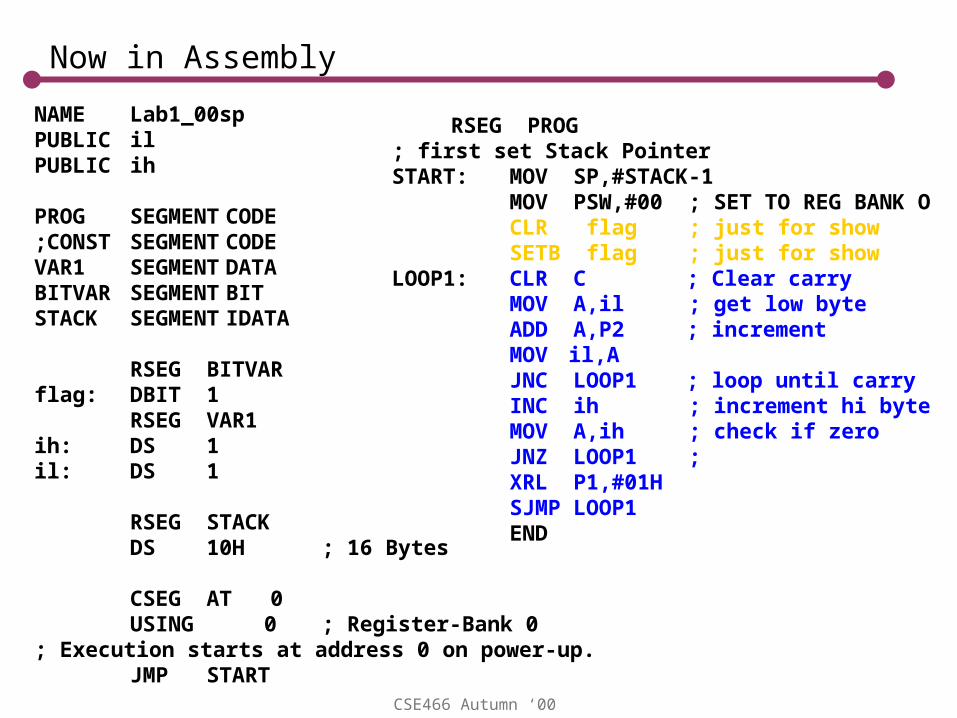
RSEG PROG; first set Stack PointerSTART: MOV SP,#STACK-1
MOV PSW,#00 ; SET TO REG BANK OCLR flag ; just for showSETB flag ; just for show
LOOP1: CLR C ; Clear carryMOV A,il ; get low byteADD A,P2 ; increment
MOV il,AJNC LOOP1 ; loop until carryINC ih ; increment hi byteMOV A,ih ; check if zeroJNZ LOOP1 ; XRL P1,#01HSJMP LOOP1END
NAME Lab1_00spPUBLIC ilPUBLIC ih
PROG SEGMENT CODE;CONST SEGMENT CODEVAR1 SEGMENT DATABITVAR SEGMENT BITSTACK SEGMENT IDATA
RSEG BITVARflag: DBIT 1
RSEG VAR1ih: DS 1il: DS 1
RSEG STACKDS 10H ; 16 Bytes
CSEG AT 0USING 0 ; Register-Bank 0
; Execution starts at address 0 on power-up.JMP START

CSE466 Autumn ‘00
Embedded Hardware
Microcontrollers Smallest: PIC 8-Pin (8-bit) PIC 8-pin Microcontroller Middle: 6805 (8 bit) Example Flash Based 8051 Many 16-bit DSP Microcontrollers
HW support for MAC, Filter Algorithms High End: StrongArm (32 bit) Intel Compare to pentium
External memory Data Address Multiplexing Memory Mapped I/O – talking to external devices
Typical Devices Resistive Sensors (Strain, Temp, Gas, etc.) Motion sensors (accelerometer) Valve Motor (Stepper, DC, Servo)\ Speaker LCD Display LED Latches Gas Sensors

CSE466 Autumn ‘00
Reset processor 1ms after powerup
1ms = 1/32 sec ~ 31ms
Let R = 10K, so C = .031/10K = 3.1uF
+
-
8051RST
10K
3.2u
what is the waveformon RST?

CSE466 Autumn ‘00
An output port
WriteReg
Pin
bus

CSE466 Autumn ‘00
What’s Inside the Buffer?
Ih
Il
WriteReg
This device always “drives”either high or low.
Current is a function of pin voltage
Never High Impedence ‘Z’
Note: this one inverts the signal, but its just an example…

CSE466 Autumn ‘00
A Bi-direction Port?
WriteReg
ReadReg
Pin
bus

CSE466 Autumn ‘00
I/O Ports
WriteReg
ReadReg
Pin
bus
DirCtl
Output driver can be disconnected from the pin so that input buffer can sense only the input signal
This kind of bi-directional portrequires a direction control register (SFR) for each bit of output (like StrongArm…

CSE466 Autumn ‘00
The 8051 (always has to be different)
Eliminate the need for configuration bits by making outputsthat can only drive strongly low (sink). There are three kinds of pins on the 8051 (of course)• No pull up• Weak pull up• Weak pull up with momentary strong pullup
To use a input pin, set output value to 1 (weak or no pullup). External signals just have to overpower the weak pull up (low resistance to ground). As output, will go from 0 to 1 slowly unless you add an external pullup
Data sheet doesn’t spec the resistance of the pull up, but it specs theAmount of current that will result in a given voltage at the pin. ForExample, in Ports 1,2,3 Ioh = -25uA at .75Vcc.

CSE466 Autumn ‘00
Application: Wired NOR
8051
8051
8051
Communication bus:Each processor tries to send data, but detects collision. If collision, then stop transmitting
Collisions are safe because nobody drives high. The one who writes the zero first gets the bus!
Q1) How can a processor detect a collision?

CSE466 Autumn ‘00
Summary
Port 0: used as address bus for external address/data bus. Uses active
pullup in this mode. Fast Can use as GPIO. Must use external pullup. Pullup size is
power/speed tradeoff, up to 3.2mA
Port 1 and 3: GPIO only. External pullups are optional. Power/speed tradeoff, up
to 1.6mA.
Port 2: Also used for external address bus. Has active and passive internal
pullups. External pullups are optional in GPIO mode, up to 1.6mA.
CSE466 Autumn ‘00
Example Problem
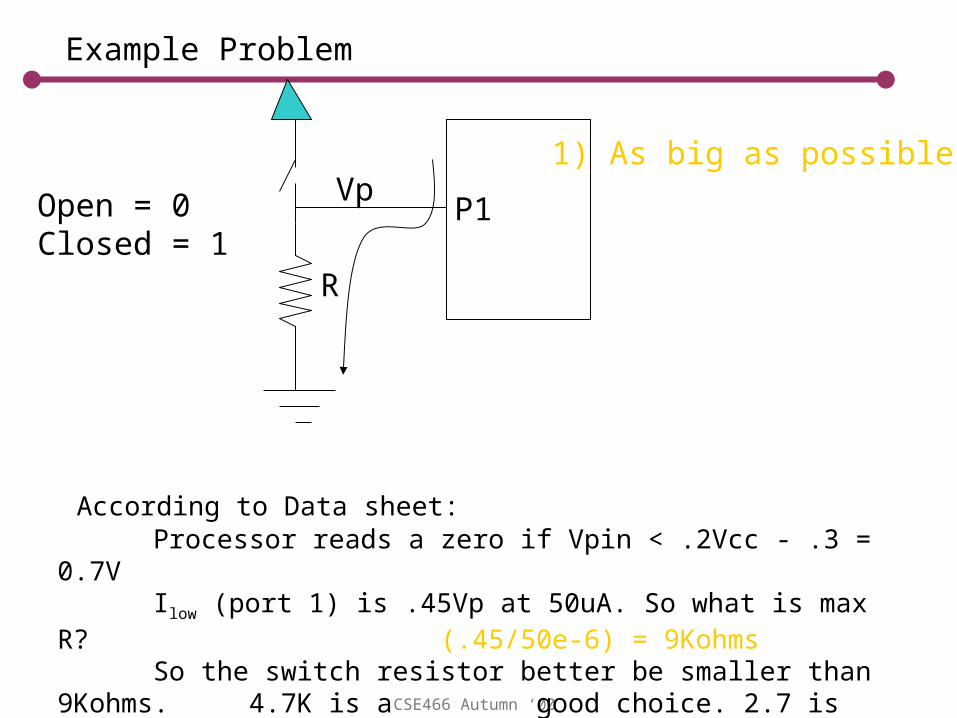
P1Open = 0Closed = 1
R
1) As big as possible!
According to Data sheet:Processor reads a zero if Vpin < .2Vcc - .3 = 0.7VIlow (port 1) is .45Vp at 50uA. So what is max R?
(.45/50e-6) = 9Kohms So the switch resistor better be smaller than 9Kohms. 4.7K
is a good choice. 2.7 is okay but higher power!
Vp

CSE466 Autumn ‘00
Careful w/ Coils (motors, etc)
Current limiterR = 50Ohms
Coil (L)
MOSFETSwitch
8051
Steady state on current: Vcc/RVds ~ 0 (Rds ~ 4mOhm)But, when we try to turn off theMosfet quickly, what happens?
•Rds goes up quickly, but Ids drops slowly)•If Rds becomes 1K, then Vds becomes 100V•And instantaneous power becomes 10W
I =0 .1A
Vds

CSE466 Autumn ‘00
I/O Ports
Input ports: Hi Input impedance (like CMOS transistor gate)
Output ports: Hi drive (current source/sink) capability (like CMOS transistor channel)
Bidirectional Ports?
Weak Pullup Approach used in the 8051
Configuration bits (used in other MCU’s)

CSE466 Autumn ‘00
Basic Electronics
Speaker Interface. Design a direct drive circuit for the speakers. How much power are we dissipating in the speaker if we stay within current rating of chip?
How can we get more power to the speaker?
Note to self: Saturation v. Linear operation

CSE466 Autumn ‘00
Design Meeting – Speaker Driver
Problems multiple tones amplification