csl5 23 j15
TRANSCRIPT
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Control Systems
DC motor

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Transfer Function of DC Motor
22 February 2015 2

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Electromechanical system?
22 February 2015 3
• System consists of electrical
and mechanical components
• System whereby power flows
between electrical and
mechanical components
• Sometimes called
mechatronic system

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
Examples of electromechanical systems
22 February 2015 4
• Speaker
• Motor

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Schematic Diagram
22 February 2015 5
Electrical
Components
Mechanical
Components
Magnetic
Field

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Transfer Function Objective
22 February 2015 6
Electrical
variable
Mechanical
variable
Electrical variable CONTROLS mechanical variable
Input: Electrical variable (applied voltage)
Output: mechanical variable (angular position)

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Electrical Components
22 February 2015 7
aaR Rtiv )(
)()( tKtv mbb
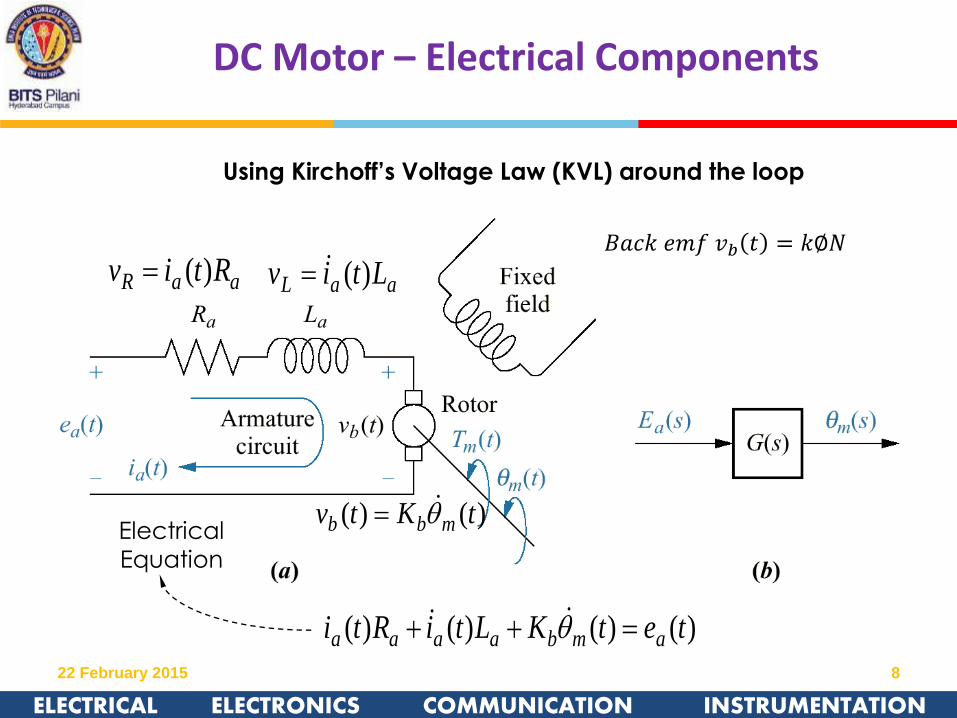
Using Kirchoff’s Voltage Law (KVL) around the loop
Electromotive
force (emf)
aaL Ltiv )(
Applied
Voltage
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Electrical Components
22 February 2015 8
aaR Rtiv )(
)()( tKtv mbb
Using Kirchoff’s Voltage Law (KVL) around the loop
aaL Ltiv )(
)()()()( tetKLtiRti ambaaaa
Electrical
Equation
𝐵𝑎𝑐𝑘 𝑒𝑚𝑓 𝑣𝑏 𝑡 = 𝑘∅𝑁
ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Mechanical Component
22 February 2015 9
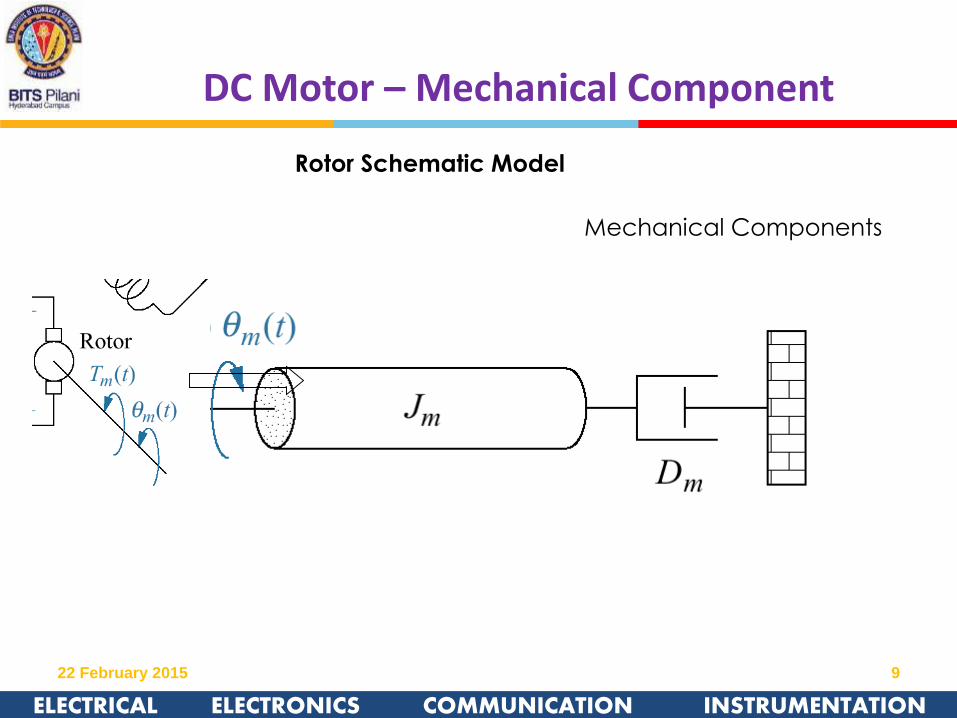
Rotor Schematic Model
Mechanical Components

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Mechanical Component
22 February 2015 10
Use Newton’s Second Law and
Free Body Diagram
mmJ
mJmmD
mT
mmmmm TDJ m
Mechanical
Equation

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Electromechanical System
22 February 2015 11
Torque-Current
Equation
mmmmm TDJ
Mechanical Equation
ambaaaa eKLiRi
Electrical Equation
atm iKT
Electromechanical
Equation

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Electromechanical System
22 February 2015 12
Combined Equation in
order to obtain the transfer
function
mmmmm TDJ Mechanical Equation
ambaaaa eKLiRi Electrical Equation
atm iKT Electromechanical Equation

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Electromechanical System
22 February 2015 13
Transform differential equations into frequency domain
mmmmm TDJ
ambaaaa eKLiRi )()()()( sEKssLssIRsI abmaaaa
)()()(2 sTssDsJs mmmmm
)()( sIKsT atm
)()()()( sEKssLssIRsI abmaaaa
Actual condition is that Resistor is much greater than Inductor

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Electromechanical System
22 February 2015 14
Combine Equations
)()()()( sEKssLssIRsI abmaaaa
)()()(2 sTssDsJs mmmmm
)()( sIKsT atm
)()()()(
sEKsssLRK
sTabmaa
t
m
)()()()()(2
sEKsssLRK
ssDsJsabmaa
t
mmmm

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Electromechanical System
22 February 2015 15
Combine Equations
)()()()()(2
sEKsssLRK
ssDsJsabmaa
t
mmmm
b
t
aam
t
aam
a
m
sKK
sLRsD
K
sLRJs
sE
s
2
1
)(
)(
)()()())(( 2
sEKsssK
sLRsDJsabmm
t
aamm

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Transfer Function Without Load
22 February 2015 16
b
t
aam
t
aam
a
m
sKK
sLRsD
K
sLRJs
sE
s
2
1
)(
)(

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Transfer Function Without Load
))/(
)/(
)(
)(
1
)(
)(
2
2
aabtmm
aat
a
m
b
t
aam
t
aam
a
m
sLRKKDssJ
sLRK
sE
s
sKK
sLRsD
K
sLRJs
sE
s
22 February 2015 17

ELECTRICAL ELECTRONICS COMMUNICATION INSTRUMENTATION
DC Motor – Transfer Function Without Load
constant motor time/
constantgain motor /
)1()(
)(
)(
/
)(
)(
,/ If
system. theof
friction viscous theincreasesy effectivelmotor theof
emfback that theindicates / termThe
DJ
DRKK
ss
K
sE
s
DsJs
RK
sE
s
RKKDD
RKKD
mm
atm
m
m
a
m
m
at
a
m
abtm
abtm
22 February 2015 18