curso de análise matemática ii parte - ime-usp · É claro que o caráter de uma sucessão não...
TRANSCRIPT
Curso de Análise Matemática
II Parte
Omar Catunda


Sumário
Capítulo V. Sucessões e séries numéricas 1
§ 1. Definição de sucessão e de série 1
§ 2. Critério de convergência de CAUCHY 2
§ 3. Limite máximo e limite mínimo. Oscilação 4
§ 4. Séries de termos positivos 5
§ 5. Séries de comparação 6
§ 6. Critérios de convergência para séries de termos positivos 7
§ 7. Série alternada 10
§ 8. Série de termos reais quaisquer 11
§ 9. Séries de termos complexos 14
§ 10. Produto de séries 17
§ 11. Séries duplas 18
§ 12. Produtos infinitos 22
Exercícios e complementos 25
Capítulo VI. Derivadas 29
§ 1. Definição. Derivadas sucessivas 29
§ 2. Interpretação geométrica 30
§ 3. Interpretação mecânica da primeira e da segunda derivada 32
§ 4. Derivada à esquerda e à direita. Números derivados 33
§ 5. Regras de derivação 34
§ 6. Derivada de função de função e de função inversa 37
§ 7. Derivadas das funções racionais 38
§ 8. Derivadas das outras funções elementares 39
§ 9. Exemplos 42
§ 10. Regra de LEIBNIZ 43
§ 11. Funções com valores complexos 44
§ 12. Funções de variáveis complexas 45
§ 13. Infinitésimos e infinitos. Ordem infinitesimal 45
§ 14. Infinitésimos equivalentes 48
§ 15. Diferencial 49
§ 16. Invariância da primeira diferencial 51
i

ii SUMÁRIO
§ 17. Teorema de ROLLE 52
§ 18. Teorema de CAUCHY ou dos acréscimos finitos 53
§ 19. Regras de L’HOSPITAL 55
§ 20. Regra de L’HOSPITAL. Continuação 57
§ 21. Aplicações da regra de L’HOSPITAL 59
§ 22. Raízes ou zeros múltiplos 61
§ 23. Máximos e mínimos 62
§ 24. Contatos das curvas planas 63
§ 25. Sentido de concavidade 65
§ 26. Círculo osculador 65
§ 27. Fórmulas de TAYLOR e de MACLAURIN 66
§ 28. Outras fórmulas do resto 68
Exercícios e complementos 70
Índice Remissivo 73
CAPÍTULO V
Sucessões e séries numéricas
§ 1. Definição de sucessão e de série. Já demos no capítulo anterior (§ 8,
ex. 10) o conceito de sucessão numérica, que é simplesmente uma função
do número natural n. Tendo em vista a simplicidade deste campo de defi-
nição, compreende-se facilmente que as sucessões podem ser estudadas, de
uma maneira elementar, muito mais extensamente que as funções em geral, e
mesmo pode-se dizer que o conceito de sucessão é muito mais antigo que o
de função.
A toda sucessão
(1) a1, a2, a3, . . . , an, . . . ou tanu
se pode associar outra, formada pelas somas parciais
s1 “ a1, s2 “ a1 ` a2, . . . , sn “ a1 ` a2 ` ¨ ¨ ¨ ` an, . . . ;
esta última sucessão chama-se série e se designa com uma das notações
(2) a1 ` a2 ` ¨ ¨ ¨ ` an ` . . . ou8ÿ
1nan.
Os números a1, a2, . . . são então chamados os termos da série, e as somas
s1, s2, . . . , são as reduzidas. Por outro lado, qualquer sucessão (1) pode ser
considerada como uma série, cujos termos são a1, a2 ´ a1, a3 ´ a2, . . . ,
an ´ an´1, . . . , pois a soma dos n primeiros elementos desta sucessão, isto
é, a reduzida nma da série formada com estes termos é exatamente an.
Os conceitos de sucessão ou série convergente, divergente e indetermi-
nada são os que já demos para funções em geral (Cap. IV, § 10) e referem-se,
naturalmente, ao único ponto de acumulação do campo dos números natu-
rais, `8. Por esta razão, sempre que se tratar de limite de sucessão, escre-
veremos simplesmente liman. Se uma sucessão é convergente e tem limite 0,
diz-se que ela é infinitésima.
Todos os teoremas sobre limites também se aplicam neste caso particular,
mas devido ao caráter especial do campo de definição, algumas noções e
demonstrações se simplificam notavelmente. Assim, por exemplo, pode-se
dizer que o limite de uma sucessão (1) é um ponto b tal que qualquer entorno
1
2 V. SUCESSÕES E SÉRIES NUMÉRICAS
de b deixa externamente um número finito de pontos da sucessão, pois se esta
condição está satisfeita, dado um entorno arbitrário de b existe um número
n0 (último índice dos elementos que não pertencem a esse entorno) tal que
para n ą n0, o ponto an está no entorno dado.
É claro que o caráter de uma sucessão não se altera se se suprime um nú-
mero finito de elementos, ou se a cada elemento se acrescenta uma constante,
ou se se multiplica cada elemento por um mesmo número diferente de zero.
Daqui se deduz que o caráter de uma série não se altera se nos limitarmos a
considerar as reduzidas de ordem maior que um certo númeroN, ou se supri-
mirmos da série (e portanto de cada reduzida além de uma certa ordem) um
número finito de termos, ou ainda, se multiplicarmos cada termo por uma
mesma constante diferente de zero. Quando uma série é convergente, o limite
(finito) da reduzida na para n Ñ 8 chama-se soma da série e indica-se com
a mesma notação usada para a série, isto é, uma qualquer das notações (2).
Note-se que em qualquer outro caso, quando se fala em soma subentende-se
que o número de parcelas é finito.
§ 2. Critério de convergência de CAUCHY. Vamos dar uma demonstra-
ção mais simples desse critério (cf. Cap. IV, § 21) baseada no conceito de
“ponto limite” de uma sucessão. Observemos primeiramente que o conceito
de sucessão, a1, a2, . . . não é o mesmo que o conceito do conjunto de pontos
representativos dos seus elementos, e isto por duas razões:
a) os pontos de um conjunto não estão forçosamente ordenados, ao con-
trário dos elementos de uma sucessão;
b) elementos distintos de uma sucessão são os que correspondem a índices
distintos, podendo eventualmente ter o mesmo valor, isto é, ser representados
pelo mesmo ponto do conjunto.
Posto isto, diremos que b é um ponto limite da sucessão
(1) a1, a2, . . . , an, . . .
se em qualquer entorno de b caem infinitos elementos desta sucessão. Esta
definição compreende, além dos pontos de acumulação do conjunto de pon-
tos representativos, todos os pontos nos quais coincidem infinitos elementos
da sucessão; estendemos também esta definição ao ponto 8, que é ponto
limite de qualquer sucessão ilimitada.
É claro que toda sucessão tem pelo menos um ponto limite, pois se os seus
pontos representativos forem em número finito, ao menos um desses pontos
deve comparecer infinitas vezes como elemento da sucessão, e se forem em
número infinito, existirá pelo teorema de BOLZANO ao menos um ponto de
acumulação, que é também ponto limite.

V. SUCESSÕES E SÉRIES NUMÉRICAS 3
Uma sucessão é convergente se tiver um único ponto limite, que seja
finito, pois neste caso, qualquer entorno deste ponto deixa externamente um
número finito de elementos (do contrário haveria certamente outro ponto
limite, além do ponto dado).
Enunciaremos o critério de convergência de CAUCHY sob a forma mais
simples: A condição necessária e suficiente para que a sucessão (1) seja con-
vergente é que dado arbitrariamente o número ε ą 0, se possa determinar em
correspondência o número n tal que para qualquer valor inteiro e positivo
de p se tenha
(2) |an`p ´ an| ă ε.
Com efeito:
a) se a sucessão tem um limite finito b, existirá um número n´ 1 tal que
para m ą n´ 1 se tenha |am ´ b| ă ε2, e portanto,
|an ´ b| ă ε
2e |an`p ´ b| ă ε
2,
donde se deduz (2);
b) suponhamos por outro lado a condição satisfeita, e vamos demons-
trar que neste caso só pode haver um único ponto limite. Com efeito, da
hipótese se deduz que a sucessão é limitada, logo não pode ter ponto limite
infinito; admitamos que haja dois pontos limites finitos b e b 1; haverá então,
certamente, números p e q tais que se tenha
(3) |an`p ´ b| ă ε e |an`q ´ b 1| ă ε.
Ora, podemos escrever
b´ b 1 “ pb´ an`pq ` pan`p ´ anq ` pan ´ an`qq ` pan`q ´ b 1q
donde, pelas desigualdades (2) e (3),
|b´ b 1| ă 4ε
e sendo ε arbitrário, temos forçosamente b “ b 1, o que demonstra que o
ponto limite é finito e é único, isto é, que a sucessão é convergente.
No caso de uma série a1 ` a2 ` . . . , basta substituir o primeiro membro
de (2) pelo valor absoluto da diferença de duas reduzidas, isto é, por
|sn`p ´ sn| “ |an`1 ` an`2 ` ¨ ¨ ¨ ` an`p|.
Do teorema demonstrado se deduz em particular, fazendo p “ 1, que
uma condição necessária para que uma série seja convergente é que o seu
termo geral an tenda a zero.

4 V. SUCESSÕES E SÉRIES NUMÉRICAS
§ 3. Limite máximo e limite mínimo. Oscilação. Seja ainda a sucessão
(1) a1, a2, . . . , an, . . .
Consideremos também, para cada valor de n, o extremo inferior ln e o
extremo superior Ln do conjunto de elementos da sucessão
(2) an`1, an`2, . . .
que se obtém da anterior suprimindo os seus n primeiros elementos.
É claro que, sendo o conjunto pan`2, an`3, . . . q uma parte do anterior,
ln`1 não pode ser menor que ln, logo temos, qualquer que seja n, ln ď ln`1,
isto é, a sucessão l1, l2, . . . é não decrescente, ao passo que, por uma razão
análoga, a sucessão L1, L2, . . . é não crescente; por conseguinte, essas duas
sucessões monótonas têm limites l e L, que são chamados, respectivamente,
o limite mínimo e o limite máximo da sucessão (1), que podem ser finitos ou
infinitos. Tais limites se designam, respectivamente, com as notações
l “ liman e L “ liman.
É evidente que temos sempre l ď L, e a igualdade só é possível quando
a sucessão tem limite. Se L e l são finitos, a diferença L ´ l “ Ω, que é o
limite da diferença Ln ´ ln “ Ωn, chama-se oscilação da sucessão. Se um
desses dois limites é infinito, dizemos que a oscilação é infinita. Para que
uma sucessão seja convergente, é necessário e suficiente que a sua oscilação
seja nula.
Tomemos alguns exemplos:
a) 0, 1, ´2, 2, ´2, . . . , a2p “ p, a2p`1 “ ´p; liman “ 8, liman “´8.
b) sen 1, sen 2, . . . , senn, . . . ; lim senn “ 1, lim senn “ ´1.
c) ´1, 1, ´2, 12, ´3, 13, . . . ; a2p´1 “ ´p, a2p “ 1p; liman “ 0,
liman “ ´8.
Se o limite máximo L é finito, ele pode ser também caracterizado pela se-
guinte propriedade: qualquer que seja ε ą 0, existem na sucessão (1) infinitos
termos maiores que L´ ε ao passo que só existe um número finito (ou nulo)
de termos maiores que L` ε. Com efeito, sendo L o extremo inferior dos Ln,
temos Ln ě L, e pelas propriedades do extremo superior, qualquer que seja
n existem termos na sucessão (2), que superam Ln ´ ε, e portanto também
L ´ ε, logo os termos que gozam desta propriedade são infinitos. Por outro
lado, sendo L o extremo inferior dos Ln, existe um valor de n para o qual
temos Ln ă L` ε, e portanto, para m ą n temos sempre am ď Ln ă L` ε,isto é, os termos que superam L` ε são no máximo em número de n.

V. SUCESSÕES E SÉRIES NUMÉRICAS 5
Da mesma forma se demonstra que o limite mínimo l é um número tal
que qualquer que seja ε ą 0, l ` ε supera uma infinidade de termos da
sucessão, ao passo que l´ ε só supera um número finito. Verifica-se também
facilmente que l é o menor e L o maior dos pontos limites da sucessão dada.
§ 4. Séries de termos positivos. Tomemos agora uma série qualquer
(1) b1 ` b2 ` ¨ ¨ ¨ ` bn ` . . .
em que tenhamos sempre bn ą 0, isto é, uma série de termos positivos.
Evidentemente, a sucessão das reduzidas desta série é monótona crescente, e
portanto não pode ser indeterminada. O seu limite, como sabemos, coincide
com o extremo superior dessas reduzidas, donde se deduz que a série (1) é
convergente se o conjunto das reduzidas é limitada superiormente. Esse li-
mite L coincide também com o extremo superior de todas as somas parciais
de termos da série, pois qualquer destas somas parciais é parte de uma redu-
zida. Daqui se deduz o seguinte: escrevamos os termos da série (1) em uma
outra ordem qualquer e seja
(2) b 11 ` b 1
2 ` ¨ ¨ ¨ ` b 1n ` . . .
a série obtida, de soma L 1. Como as reduzidas desta série (2) são particulares
somas parciais de termos da série (1) temos evidentemente L 1 ď L; mas por
uma razão análoga devemos ter também L ď L 1, logo L “ L 1, isto é: A
soma de uma série de termos positivos não se altera se alterarmos de maneira
arbitrária a ordem dos seus termos. Veremos mais adiante que nem todas as
séries gozam desta propriedade.
Suponhamos que se tenha outra série de termos positivos
(3) c1 ` c2 ` ¨ ¨ ¨ ` cn ` . . .
e que de um certo índice N em diante se tenha sempre
(4) bn ď cn.
Nestas condições, diz-se que a série (3) é majorante em relação à série
(1), e que esta é minorante em relação à (3). Neste caso, se a série (3) é
convergente, a série (1) também o é, e se a série (1) é divergente, o mesmo
acontece com a série (3). Com efeito, se a série (3) é convergente, as suas
reduzidas formam um conjunto limitado, e pela condição (4), concluimos que
as somas bN`bN`1`¨ ¨ ¨`bN`p têm um limite superior finito, logo o mesmo
acontece com as reduzidas da série (1), a qual é portanto convergente. Como
para série de termos positivos só há as duas alternativas de convergência e
divergência, segue-se que se a série (1) é divergente, a série (3) também o será.
6 V. SUCESSÕES E SÉRIES NUMÉRICAS
Este teorema também se aplica se a partir de certo índice for satisfeita a
condição bn ď kcn, com k ą 0, independente de n, pois, como já fizemos
notar, a série kc1 ` kc2 ` . . . tem o mesmo caráter da série (3).
§ 5. Séries de comparação. Vamos estudar algumas séries simples que
pela aplicação do teorema precedente servem para o estudo da convergência
ou divergência de séries de termos positivos.
Seja em primeiro lugar a chamada série geométrica de razão r:
(1) 1 ` r` r2 ` ¨ ¨ ¨ ` rn ` . . .
Se tivermos r ě 1, o termo geral não tende a zero, logo a série não pode
ser convergente. A reduzida pn ` 1qa desta série para r ‰ 1 é dada pela
conhecida fórmula de álgebra
1 ` r` r2 ` ¨ ¨ ¨ ` rn “ 1 ´ rn`1
1 ´ re é evidente que se for 0 ď r ă 1, rn`1 tende a zero, logo a série é convergente
e tem por soma1
1 ´ r .
Consideremos em segundo lugar a série harmônica
(2) 1 ` 12
` 13
` ¨ ¨ ¨ ` 1n
` . . .
Pode-se ver facilmente que esta série é divergente, reunindo os seus ter-
mos da seguinte maneira:
1 ``
12 ` 1
3
˘
``
14 ` ¨ ¨ ¨ ` 1
7
˘
` ¨ ¨ ¨ `´
12n ` 1
2n`1 ` ¨ ¨ ¨ ` 12n`1´1
¯
` . . . ;
com efeito, no último parêntesis todos os termos são maiores que 12n`1, e
como o número de termos é 2n, esse parêntesis é maior do que 2n2n`1 “12. Vemos assim que tomando n suficientemente grande, obtemos reduzidas
maiores que N2, qualquer que seja N, e portanto, a série dada é divergente.
Por outro lado, consideremos a série
(3) 1 ` 12s
` 13s
` ¨ ¨ ¨ ` 1ns
` . . .
Para s ď 1, esta série ou é a harmônica ou é majorante desta, e portanto
divergente. Vamos demonstrar que para s ą 1, a série (3) é convergente. Para
isto, basta fazer um agrupamento dos termos como o que fizemos acima:
1 `ˆ
12s
` 13s
˙
` ¨ ¨ ¨ `ˆ
1p2nqs ` 1
p2n ` 1qs ` ¨ ¨ ¨ ` 1p2n`1 ´ 1qs
˙
` . . . ;

V. SUCESSÕES E SÉRIES NUMÉRICAS 7
no último parêntesis escrito, o primeiro termo é maior que todos os outros,
logo a soma desses 2n termos é menor que
2n 12ns
“ˆ
12s´1
˙n
,
que é o termo geral de uma série geométrica de razão menor que 1, e portanto
convergente, pois sendo s ą 1, temos 2s´1 ą 1. Deduz-se assim que a série
dada é convergente.
§ 6. Critérios de convergência para séries de termos positivos. Aplicando
os resultados do parágrafo anterior, podem-se deduzir os seguintes critérios
de convergência para a série de termos positivos
(1) b1 ` b2 ` ¨ ¨ ¨ ` bn ` . . .
a) Critério da razão ou de D’ALEMBERT: Uma série de termos positivos
é convergente se, a partir de um certo índice, a razão de um termo para
o precedente é menor ou igual a um número r ă 1, e é divergente se essa
mesma razão é, de um certo termo em diante, sempre maior ou igual a um.
Com efeito, se tivermos para n ě m, bn`1bn ď r ă 1, teremos
bm`1 ď bmr, bm`2 ď bm`1r ď bmr2, . . . , bm`p ď bmr
p, . . .
e portanto a série dada admite como majorante, a partir do termo bm, a série
bm ` bmr` bmr2 ` ¨ ¨ ¨ “ bmp1 ` r` r2 ` . . . q
que é convergente. Se tivéssemos sempre bn`1bn ě 1, para n ą m teríamos
também bn ě bm; os termos da série não teriam limite zero, e a série seria
divergente.
Em particular, se a razão bn`1bn tem, para n Ñ 8, um limite b ă 1, a
série (1) é convergente, pois neste caso, tomando ε ă 1 ´ b, a partir de um
certo índice teremos certamente, bn`1bn ă b ` ε ă 1. Vê-se também que
se tivermos limbn`1bn ą 1, a série é divergente.
Desta maneira, se verifica a convergência de cada uma das séries
1) 1 ` a` a2
2! ` ¨ ¨ ¨ ` an
n! ` . . . , qualquer que seja a
2) 1 ` a` 4a2 ` 9a3 ` ¨ ¨ ¨ ` n2an ` . . . para 0 ď a ă 1
3) 1 ` 2 sen π3 ` 4 sen π
9 ` ¨ ¨ ¨ ` 2n sen π3n ` . . .
b) Critério da raiz ou de CAUCHY: Uma série de termos positivos é con-
vergente se a partir de um certo índice N a raiz na do termo geral bn for
menor ou igual a um número r ă 1, e é divergente se essa raiz for maior ou
igual a 1 para uma infinidade de termos.
Com efeito, se para n ě N tivermos n?bn ď r ă 1, deduzimos bn ď rn,
e a série dada admite como majorante a série geométrica convergente 1 ` r`

8 V. SUCESSÕES E SÉRIES NUMÉRICAS
r2 ` . . . Se para uma infinidade de termos tivermos n?bn ě 1, ou bn ě 1, o
termos geral não pode tender a zero, e a série não pode ser convergente.
Este critério de CAUCHY pode ser posto sob forma mais precisa se consi-
derarmos o limite superior (que sempre existe, como vimos no § 3) da suces-
são cujo elemento nmo é n?bn. Seja então
(2) lim na
bn “ B;
a série será convergente se tivermos B ă 1, e divergente se B ą 1. Com
efeito, no primeiro caso, dado o número positivo ε ă 1 ´ B, só pode haver
um número finito de elementos desta sucessão maiores que B` ε, e portanto
temos, a partir de um certo índice,
na
bn ď B` ε ă 1,
e a condição do critério de CAUCHY está satisfeita. Por outro lado, se for
B ą 1, haverá uma infinidade de elementos da sucessão, e portanto de termos
da série dada, maiores que 1 logo a série será divergente. Nada se pode
afirmar se o limite (2) for igual a 1.
Por exemplo, a série
1 `ˆ
12
˙4
`ˆ
23
˙9
` ¨ ¨ ¨ `ˆ
n´ 1n
˙n2
` . . . ,
pondo an “`
n´1n
˘n2
, temos n?an “
`
1 ´ 1n
˘n, cujo limite e´1, que é menor
que 1, logo a série é convergente.
c) Se compararmos a série (1) com a última série (3) do parágrafo an-
terior, deduzimos o seguinte critério: A série (1) é convergente se existe um
número s ą 1 e um número positivo k tais que a partir de um certo índice,
tenhamos
nsbn ă k,
pois neste caso, a série será minorante em relação à série convergenteř
kns.
Por outro lado, basta a comparação com a série harmônica para se chegar à
conclusão de que se existe um número positivo k tal que de um certo índice
em diante se tenha nbn ą k, a série é divergente. Este critério se aplica em
particular quando os primeiros membros das duas desigualdades precedentes
têm limites, sendo o primeiro, finito e o segundo diferente de zero.
Com este critério, verifica-se, por exemplo, que das séries
ÿ n2 ` 1n3p?
n` 1qÿ
?n
n3
?n2 ` 2
ÿ 1n n
?n
as duas primeiras são convergentes e a última, divergente.

V. SUCESSÕES E SÉRIES NUMÉRICAS 9
d) Critérios de KUMMER e de RAABE. A série de termos positivos (1) é
convergente se existe uma sucessão de números positivos c1, c2, . . . , cn, . . . e
um número positivo k tais que a partir de um certo valor de n se tenha
(3) cn ´ cn`1bn`1
bně k
e é divergente se, sendo divergente a sérieř
1cn, tivermos, a partir de um
certo índice,
cn ´ cn`1bn`1
bnď 0
(critério de KUMMER).
Com efeito, no primeiro caso, temos, para um certo n,
cnbn ´ cn`1bn`1 ě kbn
cn`1bn`1 ´ cn`2bn`2 ě kbn`1
. . .
cn`pbn`p ´ cn`p`1bn`p`1 ě kbn`p
donde, somando e dividindo por k,
bn ` bn`1 ` ¨ ¨ ¨ ` bn`p ď 1k
rcnbn ´ cn`pbn`ps ď 1kcnbn,
logo, as reduzidas da série bn ` ¨ ¨ ¨ ` bn`p ` . . . são limitadas, e portanto
esta série e a série (1) são convergentes.
No segundo caso, temos evidentemente, para qualquer valor de p e para
um valor conveniente de n, cn`pbn`p ě cnbn, donde
bn`p ě cnbn1
cn`p
e a série dada admite uma série minorante que, pela hipótese feita, é diver-
gente, logo aquela também o é.
Tomando-se em particular cn “ 1, obtemos o critério de D’ALEMBERT.
Se tomarmos cn “ n ´ 1, que satisfaz a condição para o critério de diver-
gência, obtemos o critério de RAABE: A série (1) converge se, a partir de um
certo índice, tivermos:
n
„
1 ´ bn`1
bn
ě 1 ` k pk ą 0q
e diverge se, a partir de um certo índice, tivermos
n
„
1 ´ bn`1
bn
ď 1.

10 V. SUCESSÕES E SÉRIES NUMÉRICAS
Vamos dar ainda um critério baseado na noção da integral imprópria (vd.
Cap. VII).
e) Critério da integral de Cauchy: Se a sucessão dos termos an é decres-
cente e infinitésima e se fpxq é uma função contínua e decrescente e tal que se
tenha fpnq “ an, então a série (1) converge ou diverge ao mesmo tempo que
a integral imprópriaż 8
1fpxqdx.
Com efeito, em cada intervalo n $% n ` 1 temos pela hipótese, an ěfpxq ě an`1, donde integrando nesse intervalo, que tem amplitude 1,
an ěż n`1
n
fpxqdx ě an`1
e somando em relação a n, de 1 até n,
a1 ` ¨ ¨ ¨ ` an ěż n`1
1fpxqdx ě a2 ` ¨ ¨ ¨ ` an`1.
Se a integral converge para n Ñ 8, a segunda desigualdade mostra que
a série é limitada e portanto convergente; a recíproca se deduz da primeira
desigualdade. É claro que para a validade do teorema, basta que as condições
estejam satisfeitas em um entorno esquerdo do infinito, B $ 8.
§ 7. Série alternada. Chama-se assim uma série cujos termos são alter-
nadamente positivos e negativos:
(1) b1 ´ b2 ` b3 ´ ¨ ¨ ¨ ´ p´1qnbn ` . . . pbn ą 0q.
TEOREMA: Se a sucessão dos termos de uma série alternada é não cres-
cente e infinitésima, essa série é convergente. Com efeito, a reduzida de or-
dem par s2n dessa série pode ser escrita de duas maneiras:
s2n “ pb1 ´ b2q ` pb3 ´ b4q ` ¨ ¨ ¨ ` pb2n´1 ´ b2nq ““ b1 ´ pb2 ´ b3q ´ ¨ ¨ ¨ ´ pb2n´2 ´ b2n´1q ´ b2n.
Como, pela hipótese feita, (bn ě bn`1) todas as diferenças escritas são
não negativas, vê-se, pela primeira expressão, que s2n é uma sucessão não
decrescente e pela segunda, que ela é limitada superiormente (s2n ă b1), logo
existe o limite s de s2n. Por outro lado, a reduzida de ordem ímpar s2n`1 é
igual a s2n ` b2n`1, e como, pela hipótese, b2n`1 tende a zero, temos
lim s2n`1 “ lim s2n “ s,
o que demonstra o teorema.

V. SUCESSÕES E SÉRIES NUMÉRICAS 11
Além disto, podemos observar que a soma s da série é ao mesmo tempo
extremo superior das reduzidas de ordem par e o extremo inferior das redu-
zidas de ordem ímpar, logo temos
s2n ď s ď s2n`1 e s2n`2 ď s ď s2n`1;
destas desigualdades se deduz que o erro cometido quando se toma como
valor aproximado da série uma reduzida qualquer e menor que o valor abso-
luto da diferença entre essa reduzida e a seguinte, isto é, que o valor absoluto
do primeiro termo desprezado. É evidente também que o teorema continua
válido se todas as condições enunciadas forem satisfeitas somente a partir de
um certo índice.
como exemplo, podemos citar a série harmônica alternada
1 ´ 12
` 13
´ ¨ ¨ ¨ ´ p´1qn 1n
` . . .
cuja soma veremos mais adiante que é log 2.
§ 8. Série de termos reais quaisquer. Suponhamos dada a série de núme-
ros reais
(1) a1 ` a2 ` ¨ ¨ ¨ ` an ` . . .
Diz-se que esta série é absolutamente convergente quando é convergente
a série
(2) |a1| ` |a2| ` ¨ ¨ ¨ ` |an| ` . . .
formada com os valores absolutos dos termos da série dada. Se a série (1)
é convergente e (2) divergente, diz-se que a primeira é simplesmente conver-
gente. Neste parágrafo vamos demonstrar o seguinte:
TEOREMA DE DIRICHLET. A condição necessária e suficiente para que
uma série seja convergente qualquer que seja a ordem dos seus termos, é que
ela seja absolutamente convergente. Neste caso, a soma da série é também
independente da ordem dos termos.
Com efeito, suponhamos que a série (2) seja convergente e tenha por
soma T . A enésima reduzida Sn de (1) pode ser escrita como a diferença
entre a soma Pn dos termos positivos e a soma Qn dos valores absolutos dos
termos negativos, contidos nessa reduzida:
(3) Sn “ Pn ´Qn;
por outro lado, a enésima reduzida Tn da série (2) é evidentemente igual à
soma dessas mesmas quantidades, isto é,
(4) Tn “ Pn `Qn.

12 V. SUCESSÕES E SÉRIES NUMÉRICAS
Se a sucessão tTnu é convergente, o seu limite é, como sabemos, o seu
extremo superior T , e como o segundo membro de (4) é uma soma de parcelas
não negativas, temos, qualquer que seja n, Pn ď Tn ď T e Qn ď Tn ď T ,
logo as somas Pn e Qn, que são funções monótonas não decrescentes de n,
são limitadas superiormente e portanto convergentes; temos pois limPn “ P
e limQn “ Q, donde se deduz, para as somas (3) e (4),
lim Tn “ T “ P `Q e lim Sn “ S “ P ´Q,
o que mostra que a série (1) é convergente. Ora, se escrevermos os termos da
série dada em uma outra ordem qualquer
(5) ai1 ` ai2 ` ¨ ¨ ¨ ` ain ` . . .
e fizermos a mesma decomposição acima da enésima reduzida, temos
S 1n “ ai1 ` ¨ ¨ ¨ ` ain “ P 1
n ´Q 1n
e é claro que, sendo P 1n soma de um número finito de termos positivos da
série (1), temos P 1n ď P e analogamente Q 1
n ď Q; chamando P 1 e Q 1 respec-
tivamente, os limites de P 1n e Q 1
n, segue-se P 1 ď P e Q 1 ď Q. Mas a série
(1) pode-se também considerar como obtida de (5) alterando a ordem dos
termos desta, logo temos, pela mesma razão, P ď P 1 e Q ď Q 1, donde P “ P 1
e Q “ Q 1, o que mostra que a soma da série (5) é
S 1 “ P 1 ´Q 1 “ P ´Q “ S;
portanto, a convergência da série (2) é condição suficiente não só para a
convergência de (1) como para que a soma desta seja independente da ordem
dos termos.
Para provar que a condição também é necessária, vamos demonstrar o
seguinte:
TEOREMA DE RIEMANN-DINI. Se uma série é simplesmente convergente,
é sempre possível ordenar os seus termos de modo a obter ora uma série con-
vergente com soma assinalada a priori, ora uma série divergente, ora uma
série indeterminada.
Com efeito, da hipótese de ser a série (1) simplesmente convergente se
deduz, usando a notação anterior,
(6) liman “ 0, limpPn ´Qnq “ S e limpPn `Qnq “ 8.
Da última igualdade, segue-se que pelo menos uma das somas Pn ou
Qn é divergente. Mas se uma fosse convergente e a outra não, a diferença

V. SUCESSÕES E SÉRIES NUMÉRICAS 13
não poderia ser convergente, logo temos, ao mesmo tempo, limPn “ 8 e
limQn “ 8.
Para simplificar, indiquemos com a 11, a 1
2, . . . os termos positivos, na or-
dem em que aparecem na série dada, e com ´a21 , ´a2
2 , . . . os termos nega-
tivos. Seja λ um número real escolhido arbitrariamente; tomemos na série
dada, na mesma ordem em que estão dispostos, os termos positivos estrita-
mente necessários para se obter uma soma maior que λ;
S 1p1
“ a 11 ` a 1
2 ` ¨ ¨ ¨ ` a 1p1
ą λ, sendo a 11 ` ¨ ¨ ¨ ` a 1
p1´1 ď λ
(se λ fosse negativo, não tomaríamos nenhum termo nessa primeira opera-
ção). Isto é possível, pois podem-se obter somas de termos positivos maiores
que qualquer número dado. Feito isto, acrescentemos termos negativos, na
ordem em que estão colocados, até obter uma soma algébrica menor que λ,
o que é possível pela mesma razão:
S 1p1`q1
“ a 11 ` ¨ ¨ ¨ ` a 1
p1´ a2
1 ´ ¨ ¨ ¨ ´ a2q1
ă λ
sendo
S 1p1`q1´1 “ a 1
1 ` ¨ ¨ ¨ ` a 1p1
´ a21 ´ ¨ ¨ ¨ ´ a2
q1´1 ě λ.
Depois acrescentemos outros termos positivos até obter soma maior que
λ e assim sucessivamente. Ora, de
S 1p1´1 ď λ ď S 1
p1
deduzimos
S 1p1
´ λ ď S 1p1
´ S 1p1´1 “ a 1
p1
e pela construção da soma S 1p1`q1
vemos que todas as somas S 1p1`1, S 1
p1`2,
. . . , S 1p1`q1´1 estão compreendidas entre S 1
p1e λ, ao passo que temos
0 ď λ´ S 1p1`q1
ď S 1p1`q1´1 ´ S 1
p1`q1“ a2
q1.
Mas esse raciocínio se pode aplicar a todas as reduzidas que se obtêm
sucessivamente com o processo indicado, e portanto, a diferença entre uma
reduzida da série obtida e λ é em valor absoluto menor que um termo da
série dada, cujo índice cresce indefinidamente, e como esse termo tende a
zero, deduzimos que para a reduzida S 1n dessa série,
lim S 1n “ λ.
É fácil agora compreender como se pode construir com os mesmos ter-
mos da série (1), uma série divergente. Basta somar termos positivos até se
obter uma soma maior que 1, e depois somar os termos negativos estrita-
mente necessários para que a soma seja menor que 1; depois, somar termos

14 V. SUCESSÕES E SÉRIES NUMÉRICAS
positivos de modo a obter uma soma maior que 2 e somar os termos negati-
vos necessários para que a soma seja menor que 2, e assim sucessivamente,
pois todas essas operações são possíveis pelas hipóteses (6); é claro que dessa
maneira se obtém uma série divergente, e mais precisamente, com soma `8.
De maneira análoga se pode obter uma série cuja reduzida tenda para ´8ou uma série que tenha uma infinidade de reduzidas maiores que 1 e outra
infinidade menores que 0, isto é, uma série indeterminada.
§ 9. Séries de termos complexos. Assim como consideramos as sucessões
reais como funções reais do número inteiro n, podemos também considerar
sucessões de números complexos (cf. Cap. IV, § 23). Como já vimos, a defini-
ção de entorno pεq de um número complexo α (ε real e ą 0) permite estender
ao campo complexo toda a teoria dos limites, com exceção, naturalmente,
dos teoremas que se baseiam na noção de ordem. Assim, é fácil ver que
os teoremas sobre as operações racionais e o critério geral de convergência
de CAUCHY se aplicam integralmente ao caso de sucessões complexas, pois
as desigualdades que são satisfeitas pelo valor absoluto, em que se baseiam
as demonstrações, são válidas também para módulos dos números comple-
xos. Mas não tem sentido aqui falar de critério de confronto nem de limite
máximo ou limite mínimo de uma sucessão.
Tomemos agora uma sucessão de números complexos α1, α2, . . . , αn,
. . . e suponhamos decomposto cada termo na sua parte real e na parte imagi-
nária: αn “ an ` ibn. Se essa sucessão tem limite α “ a` ib, isso significa
que a diferença
α´ αn “ pa´ anq ` ipb´ bnq
tente a zero, isto é, o seu módulo torna-se menor que um número positivo
fixo qualquer, desde que n seja suficientemente grande. Mas daqui se se-
gue também que tanto a parte real como o coeficiente do imaginário dessa
diferença têm a mesma propriedade, isto é, temos
liman “ a e limbn “ b.
Reciprocamente, se esses limites existem, como temos
|α´ αn| “b
pa´ anq2 ` pb´ bnq2,
é claro que α´ αn também tende a zero para n Ñ 8, isto é,
limαn “ α “ a` ib.
Portanto, para que uma sucessão de números complexos seja convergente
é necessário e suficiente que as sucessões formadas pelas partes reais e pelos

V. SUCESSÕES E SÉRIES NUMÉRICAS 15
coeficientes do imaginário dos elementos dessa sucessão sejam ambas con-
vergentes.
Deduz-se daqui imediatamente que para uma série de termos complexos
(1) α1 ` α2 ` ¨ ¨ ¨ ` αn ` . . .
seja convergente, é necessário e suficiente que sejam convergentes as duas
sériesř
an eř
bn. Como consequência, vale também o teorema de DIRI-
CHLET, isto é, a série (1) tem uma soma finita independente da ordem dos
termos, quando, e somente quando a série formada pelos módulos dos seus
termos é convergente (a série é absolutamente convergente). Note-se porém
que quando se aplica o processo descrito na demonstração do teorema de
RIEMANN-DINI, para impor à série das partes reais um valor real γ, a ordem
dos coeficientes do imaginário fica determinada pela ordem dos termos αn;
daqui se conclui que não é possível, em geral, impor à série (1) uma soma
que seja um número complexo arbitrário.
Vamos agora demonstrar uma desigualdade que tem várias aplicações:
TEOREMA DE ABEL. Sejam b1, b2, . . . , bn n números positivos em or-
dem não crescente e sejam α1, α2, . . . , αn n números complexos quaisquer;
chamando A o máximo módulo das somas Sr “ α1 ` α2 ` ¨ ¨ ¨ ` αr, para
r “ 1, 2, . . . , n, temos (desigualdade de ABEL):
(2) |b1α1 ` b2α2 ` ¨ ¨ ¨ ` bnαn| ď b1A.
Com efeito, temos α1 “ S1, e para r ą 1, αr “ Sr´Sr´1, logo o primeiro
membro de (2) pode-se escrever
nÿ
1
brαr “ b1S1 ` b2pS2 ´ S1q ` b3pS3 ´ S2q ` ¨ ¨ ¨ ` bnpSn ´ Sn´1q
“ pb1 ´ b2qS1 ` pb2 ´ b3qS2 ` ¨ ¨ ¨ ` pbn´1 ´ bnqSn´1 ` bnSn;
tomando o módulo, sendo todas as diferenças números reais não negativos e
sendo |Sr| ď A, para r “ 1, 2, . . . , n, obtemosˇ
ˇ
ˇ
ˇ
ˇ
nÿ
1
brαr
ˇ
ˇ
ˇ
ˇ
ˇ
ď A rpb1 ´ b2q ` pb2 ´ b3q ` ¨ ¨ ¨ ` bns “ Ab1,
como queríamos demonstrar.
Como aplicação desta desigualdade, podemos demonstrar o critério de
convergência de DIRICHLET, chamado por alguns autores critério de ABEL:
Se a1, a2, . . . , an, . . . é uma sucessão de números complexos tais que as

16 V. SUCESSÕES E SÉRIES NUMÉRICAS
somas parciaisn
ÿ
1rar
sejam limitadas em módulo e b1, b2, . . . , bn, . . . é uma sucessão não crescente
e infinitésima de números positivos (limbn “ 0) a série
(3)8ÿ
1
anbn
é convergente. Com efeito, sendo |řn
1 ar| ď A (independente de n), temos
também, quaisquer que sejam os números positivos n e p,
|an ` an`1 ` ¨ ¨ ¨ ` an`p| “ˇ
ˇ
ˇ
ˇ
ˇ
n`pÿ
1rar ´
n´1ÿ
1rar
ˇ
ˇ
ˇ
ˇ
ˇ
ď 2A;
por outro lado, dado arbitrariamente ε ą 0, existe pela hipótese um número
bn ă ε
2A,
donde, pela desigualdade de ABEL,
|anbn ` an`1bn`1 ` ¨ ¨ ¨ ` an`pbn`p| ď 2Abn ă ε,
independentemente de p, o que mostra que para a série (3) está satisfeito o
critério geral de convergência de CAUCHY.
Tomando-se αn “ p´1qn´1, deduz-se novamente o teorema das séries
alternadas. Outro exemplo é o da série
(4) 1 ` α` α2
2` α3
3` ¨ ¨ ¨ ` αn
n` . . .
em que α é uma raiz pa da unidade, diferente de 1. Sendo então αp “ 1,
temos
αn ` αn`1 ` ¨ ¨ ¨ ` αn`p´1 “ αnp1 ` α` α2 ` ¨ ¨ ¨ ` αp´1q “
“ αnαp ´ 1α´ 1
“ 0
donde se deduz que em qualquer reduzida da sérieř
αn, todos os grupos de
p termos consecutivos têm soma nula; essas reduzidas só podem pois tomar
um dos p valores 1, 1 ` α, 1 ` α ` α2, . . . , 1 ` α ` α2 ` ¨ ¨ ¨ ` αp´1 “ 0,
e portanto são limitadas em módulo, e podemos aplicar o teorema anterior,
fazendo an “ αn e bn “ 1n, o que demonstra a convergência da série dada
(4).

V. SUCESSÕES E SÉRIES NUMÉRICAS 17
§ 10. Produto de séries. Sejam dadas as duas séries de termos quaisquer,
reais ou complexos:
(1) a0 ` a1 ` a2 ` ¨ ¨ ¨ ` an ` . . .
(2) b0 ` b1 ` b2 ` ¨ ¨ ¨ ` bn ` . . .
e ponhamos
c0 “ a0b0, c1 “ a1b0 `a0b1, . . . , cn “ anb0 `an´1b1 `¨ ¨ ¨`a0bn, . . .
e consideremos a série formada com os elementos obtidos:
(3) c0 ` c1 ` c2 ` ¨ ¨ ¨ ` cn ` . . .
Esta série se chama produto das séries dadas, qualquer que seja a natu-
reza destas. Vamos demonstrar dois teoremas importantes sobre esse produto
de séries:
a) TEOREMA DE CAUCHY: O produto de duas séries absolutamente con-
vergentes é uma série absolutamente convergente que tem por soma o pro-
duto das somas das séries dadas. Ponhamos em geral
a 1n “ |an| b 1
n “ |bn| c 1n “ a 1
nb10 ` a 1
n´1b11 ` ¨ ¨ ¨ ` a 1
0b1n;
chamemos An, Bn, Cn as reduzidas das séries (1), (2), (3) e A 1n, B 1
n, C 1n as
reduzidas das sériesř
a 1n,
ř
b 1n,
ř
c 1n, e para cada valor de n tomemos o
número m tal que m ď n2 ă m ` 1. É fácil ver então que a reduzida C 1n
contém todos os termos do produto A 1mB
1m, ao passo que todos os seus ter-
mos estão contidos no produto A 1nB
1n. Tratando-se de termos não negativos,
temos então,
A 1mB
1m ď C 1
n ď A 1nB
1n.
Fazendo tender n ao infinito,m também tenderá, e os membros extremos
desta desigualdade têm o mesmo limite
limA 1nB
1n “ limA 1
n. limB 1n “ A 1B 1
sendo A 1 e B 1 as somas das sériesř
a 1n e
ř
b 1n; logo, a série
ř
c 1n, de termos
não negativos, é convergente e tem por soma A 1B 1; ora, pela definição dos
seus termos, temos evidentemente |cn| ď c 1n, e portanto a série (3) é absolu-
tamente convergente. Para terminar a demonstração do teorema, basta notar
que se desenvolvermos a diferença A 1nB
1n ´ C 1
n, veremos que cada um dos
seus termos é o módulo do termo correspondente da diferença AnBn ´ Cn,
logo,
|AnBn ´ Cn| ď A 1nB
1n ´ C 1
n,

18 V. SUCESSÕES E SÉRIES NUMÉRICAS
e como o segundo membro desta desigualdade tende a zero, o primeiro tam-
bém tende, donde (chamando A e B as somas das séries (1) e (2))
limCn “ limAnBn “ limAn. limBn “ AB,
o que demonstra o teorema.
b) TEOREMA DE MERTENS: O produto de duas séries convergentes, uma
das quais é absolutamente convergente, é convergente e tem por soma o pro-
duto das somas das séries dadas.
Para a demonstração, suponhamos a série (1) convergente e a série (2)
absolutamente convergente, ambas de termos reais ou complexos e de somas
A e B respectivamente, e mostremos que a diferença Cn ´ABn é infinitésima
para n Ñ 8; ora, como se vê facilmente, a reduzida Cn pode ser escrita sob
a forma Anb0 `An´1b1 ` ¨ ¨ ¨ `A0bn, logo temos
(4) Cn ´ABn “ pAn ´Aqb0 ` pAn´1 ´Aqb1 ` ¨ ¨ ¨ ` pA0 ´Aqbn;
seja então M um limite superior dos módulos de todas as diferenças Aq ´A,
N um limite superior das reduzidas da sérieř
|bn|, limites esses que existem
pelas hipóteses feitas. Dado então o número ε ą 0 arbitrário, existe, por
essas mesmas hipóteses (convergência de (1) e convergência absoluta de (2)),
um número inteiro p tal que para n ą p se tenha ao mesmo tempo
|An ´A| ă ε
2Ne |bn| ` |bn`1| ` ¨ ¨ ¨ ` |bn`q| ă ε
2M.
Para n ą 2p, e portanto n´p ą p, podemos escrever então, decompondo
em duas partes o segundo membro de (4),
|Cn ´ABn| “ |tpAn ´Aqb0 ` ¨ ¨ ¨ ` pAn´p ´Aqbpu`` tpAn´p´1 ´Aqbp`1 ` ¨ ¨ ¨ ` pA0 ´Aqbnu|
ă ε
2NN`M ε
2M“ ε,
o que demonstra a nossa afirmação, e portanto,
limCn “ limABn “ A limBn “ AB.
§ 11. Séries duplas. Seja dada uma correspondência entre cada par de
números naturais pm, nq e um número complexo, isto é, uma função monó-
droma de dois números naturais amn. Ponhamos os valores dessa função na
V. SUCESSÕES E SÉRIES NUMÉRICAS 19
seguinte disposição:
(1)
a11 ` a12 ` . . . ` a1n ` . . .
` a21 ` a22 ` . . . ` a2n ` . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
` am1 ` am2 ` . . . ` amn ` . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
e chamemos Smn a soma de todos os números contidos nas m primeiras
linhas (horizontais) e nas n primeiras colunas. Essa função Smn de dois
números naturais chama-se série dupla, e indica-se também com o símbolo
(2)ÿ
m,namn.
Diz-se que esta série dupla é convergente, quando o número Smn (re-
duzida) tem um limite finito S, para m e n tendendo simultaneamente ao
infinito; mais precisamente, quando, dado o número ε positivo arbitrário, é
possível determinar dois números inteiros M e N tais que para m ą M e
n ą N, se tenha
|Smn ´ S| ă ε;
neste caso, esse limite S chama-se soma da série dada, e se designa também
com as mesmas notações (1) ou (2).
Quando a série dupla formada com os módulos dos elementos amn da
série (1) é convergente, a série dada se diz absolutamente convergente. Po-
nhamos em geral bmn “ |amn|, e suponhamos convergente a série dupla
(3)
b11 ` b12 ` . . . ` b1n ` . . .
` b21 ` b22 ` . . . ` b2n ` . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
` bm1 ` bm2 ` . . . ` bmn ` . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Esta última série só pode ser convergente se todas as somas de termos
tirados da mesma formarem um conjunto limitado; neste caso, a sua soma é
o extremo superior L desse conjunto, pois por um lado, temos Smn ď L, e
por outro lado, dado L 1 ă L, existe uma soma de termos de (3) maior que
L 1, a qual está contida em uma das reduzidas Spq, com p e q suficientemente
grandes; e como se trata de somas de termos não negativos, teremos para
m ě p e n ě q, L 1 ă Smn ď L. Vê-se também que neste caso todas as séries
dos elementos de qualquer linha ou coluna são convergentes, pois em todas

20 V. SUCESSÕES E SÉRIES NUMÉRICAS
essas séries as reduzidas são limitadas superiormente; ponhamos em geral
bm1 ` bm2 ` ¨ ¨ ¨ ` bmn ` . . . “ Bm (soma da ma linha)
b1n ` b2n ` ¨ ¨ ¨ ` bmn ` . . . “ B 1n (soma da na coluna).
Podemos também considerar as séries
B1 ` B2 ` ¨ ¨ ¨ ` Bn ` . . .(4)
B 11 ` B 1
2 ` ¨ ¨ ¨ ` B 1n ` . . .
que se chamam, respectivamente, somas por linhas e por colunas da série
dupla (3). Como cada reduzida B1 ` B2 ` ¨ ¨ ¨ ` Bm da série (4) é o limite da
sucessão não decrescente Sm1, Sm2, . . . , temos evidentemente,
Smn ď B1 ` B2 ` ¨ ¨ ¨ ` Bm ď L,
e sendo L o extremo superior dos números Smn, temos
B1 ` B2 ` ¨ ¨ ¨ ` Bm ` ¨ ¨ ¨ “ L
e analogamente,
B 11 ` B 1
2 ` ¨ ¨ ¨ ` B 1n ` ¨ ¨ ¨ “ L,
isto é, se uma série dupla de termos positivos é convergente, a sua soma pode
ser obtida somando-a por linhas ou por colunas.
Consideremos, por outro lado a série
(5) b11 ` pb21 ` b12q ` pb31 ` b22 ` b13q ` . . .
cujos termos são as somas dos elementos da série (3) que pertencem a cada
diagonal. Esta série (5) se chama série principal da série dupla (3). É claro
que as suas reduzidas tem o mesmo limite superior L e que a sua reduzida na
contém todos os termos de Spq, desde que seja p ` q ď n; conclui-se daqui
facilmente que a série (5) é também convergente e tem por soma L.
Voltando à série (1), supondo primeiramente os seus termos reais, pode-
se, de modo análogo ao que foi feito para as séries de termos reais quaisquer,
decompor cada reduzida Smn na soma Pmn dos seus termos positivos e na
soma ´Qmn doas seus termos negativos: Smn “ Pmn ´Qmn. Neste caso,
a reduzida S 1mn da série dos valores absolutos (3) será S 1
mn “ Pmn `Qmn,
e raciocinando sobre os dois conjuntos dos valores de Pmn e Qmn, que são
evidentemente limitados, chega-se ao resultado:
lim S 1mn “ limPmn ` limQmn “ P `Q e lim Smn “ P ´Q,
V. SUCESSÕES E SÉRIES NUMÉRICAS 21
isto é, uma série dupla absolutamente convergente é convergente. A conside-
ração das funções Pmn e Qmn, que se podem considerar como séries duplas
de termos não negativos, permite também facilmente chegar aos seguintes
resultados:
a) Se uma série dupla é absolutamente convergente, a sua soma pode-se
obter ou somando por linhas, ou somando por colunas, ou somando a série
principal.
b) A soma de uma série dupla absolutamente convergente é independente
da ordem de colocação dos seus termos.
Estes resultados se estendem facilmente às séries duplas de termos com-
plexos, bastando separar em cada termo a parte real e a parte imaginária.
Para séries duplas de termos quaisquer tem importância muito grande o
seguinte
TEOREMA DE PRINGSHEIM: Se a série dupla (1) é convergente e tem
limite S, e se as séries de linhas e de colunas também são convergentes, estas
duas séries também têm por soma S. Com efeito, dado ε ą 0, existe pela
hipótese da convergência um número N tal que para m ą N e n ą N se
tenha |Smn ´ S| ă ε; então, como existem também por hipótese as somas
das séries de linhas, existirá também o limite de Smn para n Ñ 8, qualquer
que seja m, e passando ao limite na desigualdade anterior, temos então,
ˇ
ˇ
ˇlimnÑ8
Smn ´ Sˇ
ˇ
ˇď ε;
mas o limite escrito não é mais do que a reduzida de ordem m da série for-
mada pelas somas das séries de linhas. Como esta última desigualdade vale
desde que seja m ą N, deduz-se então que essa reduzida tem limite S, como
queríamos demonstrar. De maneira análoga se deduz que tem o mesmo limite
a série formada pelas somas das séries de colunas.
Também se podem considerar as séries triplasř
amnp ou séries múltiplas
em geral.
Note-se também que dadas as duas séries simples
a0 ` a1 ` ¨ ¨ ¨ ` an ` . . .
b0 ` b1 ` ¨ ¨ ¨ ` bn ` . . .
podemos construir a série duplař
ambn, cuja série principal éř8
0 m
řm0 papbm´p, isto é, justamente a série simples que definimos como
o produto das duas series dadas (§ 10).

22 V. SUCESSÕES E SÉRIES NUMÉRICAS
§ 12. Produtos infinitos. Tomemos uma sucessão de números todos di-
ferentes de zero, que podemos sempre escrever
(1) 1 ` a1, 1 ` a2, . . . , 1 ` an, . . . pan ‰ ´1q;
chama-se produto infinito formado com esses números, a sucessão dos pro-
dutos parciais 1 ` a1, p1 ` a1qp1 ` a2q, . . . ; esse produto se costuma indicar
com a notação
(2)8
ź
1np1 ` anq “ p1 ` a1q . . . p1 ` anq . . .
notação que também designa o limite, se existe, dos produtos parciais, quan-
do n Ñ 8.
Um produto infinito se diz convergente quando o produto parcial tem,
para n Ñ 8, um limite finito e diferente de zero. O critério de convergência
de CAUCHY diz que a condição necessária e suficiente para que esse limite
exista e seja finito é que dado ε ą 0 arbitrário, seja possível achar um valor
de n tal que para qualquer valor inteiro positivo de p se tenha
|Pn`p ´ Pn| ă ε.
Mas da condição de ser diferente de zero esse limite pode deduzir um
outro teorema: condição necessária e suficiente para que o produto (2) seja
convergente é que dado ε ą 0, seja possível determinar um valor de n tal que
para qualquer valor inteiro e positivo p se tenha
(3)
ˇ
ˇ
ˇ
ˇ
Pn`p
Pn´ 1
ˇ
ˇ
ˇ
ˇ
“ |p1 ` an`1q . . . p1 ` an`pq ´ 1| ă ε.
Com efeito: a) suponhamos primeiramente o produto convergente para
um limite P ‰ 0. Dado então um número positivo k ă |P|, existe um número
n0 tal que para n ą n0 se tenha |Pn| ą k; mas pelo critério de convergência
de CAUCHY, pode-se então determinar um valor de n ą n0 tal que resulte
qualquer que seja p ě 0,
|Pn`p ´ Pn| ă kε,
donde, dividindo membro a membro pela desigualdade |Pn| ą k, obtém-se
(3); fica assim demonstrado que a condição é necessária.
b) suponhamos agora a condição satisfeita; tomemos um número posi-
tivo ε ă 1; existirá então um número n tal que, qualquer que seja p, se tenha
(3), donde se deduz
|Pn`p ´ Pn| ă ε|Pn|,

V. SUCESSÕES E SÉRIES NUMÉRICAS 23
e portanto
|Pn|p1 ´ εq ă |Pn`p| ă |Pn|p1 ` εq;
sendo essa desigualdade satisfeita para qualquer valor de p, segue-se que a
sucessão t|Pm|u para m ą n é limitada superior e inferiormente por dois
números positivos, isto é, temos 0 ă k ă |Pm| ă K; dado então o número
arbitrário ε 1 ą 0, existe um valor de m ą n tal que para qualquer valor
inteiro e positivo de q se tenha também
|Pm`q ´ Pm| ă ε 1
K|Pm| ă ε 1,
logo, pelo critério de CAUCHY essa sucessão Pn tem limite; e como, para
m ą n temos |Pm| ą k ą 0, esse limite é diferente de zero, o que demonstra
que a condição enunciada é suficiente.
Para p “ 1, o teorema mostra que uma condição necessária (mas não
suficiente) para a convergência do produto infinito (2) é que se tenha
(4) liman “ 0.
Convergência absoluta. Efetuando as operações indicadas no segundo
membro de (3), obtém-se um polinômio em an`1, . . . , an`p, com coeficien-
tes positivos, donde se deduz que essa expressão não pode ser maior que
(5) p1 ` |an`1|q . . . p1 ` |an`p|q ´ 1.
Deduz-se daqui e do teorema precedente, que se o produto infinito
(6)8
ź
1np1 ` |an|q
é convergente, o produto dado (2) também o é. Quando essa condição está
satisfeita, o produto (2) se diz absolutamente convergente. Para os produtos
da forma (6), isto é, para os produtos
(7)8
ź
1np1 ` bnq
em que os bn são todos reais e não negativos, subsiste um teorema impor-
tante, que relaciona a sua convergência com a da sérieř
bn. Com efeito,
vê-se imediatamente que o mínimo da expressão ex ´ x é 1, que se obtém
para x “ 0. Tem-se portanto, qualquer que seja x,
ex ě 1 ` x.

24 V. SUCESSÕES E SÉRIES NUMÉRICAS
Temos então,
1 ` b1 ď eb1
1 ` b2 ď eb2
. . .
1 ` bn ď ebn
donde, multiplicando membro a membro e notando que os bn são todos não
negativos, obtém-se
(8) b1 ` b2 ` ¨ ¨ ¨ ` bn ďź
rp1 ` brq ď eb1`b2`¨¨¨`bn .
Da segunda dessas desigualdades se deduz que se a série de termos não
negativosř
bn é convergente, o produto (7) também o é, pois os produtos
parciais formam uma sucessão não decrescente e limitada; a primeira igual-
dade por sua vez mostra que se o produto (7) é convergente, a sérieř
bn
também o é. Desse resultado se deduz que a condição necessária e suficiente
para que o produto infinito (2) seja absolutamente convergente, é que a sérieř
an seja absolutamente convergente.
Mudança da ordem dos fatores de um produto infinito. Vamos demons-
trar que quando um produto (2) de fatores reais é absolutamente conver-
gente, são também convergentes os produtos dos termos em que an ą 0 e
os produtos dos fatores que an ă 0. Antes de tudo, notando que da con-
vergência do produto se deduz liman “ 0, temos, de um certo índice em
diante, |an| ă 1. Podemos então supor esta condição satisfeita para todos os
valores de n, isto é, supor todos os fatores do produto (2) positivos, pois do
contrário bastaria separar como fator constante um produto parcial de um
número finito de fatores.
Posto isto, chamemos Pn o produto dos n primeiros fatores do produto
(2); Rn, o produto dos fatores maiores que 1 que entram nesse produto, e
Qn o produto dos fatores menores que 1. Teremos evidentemente,
(9) Pn “ RnQn.
Por outro lado, sendo o produto absolutamente convergente, também é
convergente o produto
(10)ź
p1 ` |an|q
e chamando Pn o produto parcial deste último, temos
(11) Pn “ RnQn

EXERCÍCIOS E COMPLEMENTOS 25
em que Rn é o mesmo que o anterior e Qn é o produto dos fatores p1 ´ arqpara r ď n e ar ă 0. Sendo todos os fatores de Rn e de Qn maiores que 1,
e sendo a sucessão Pn convergente, serão também convergentes as sucessões
Rn e Qn, pois são ambas crescentes e limitadas. Tem-se portanto Rn Ñ R, e
como Pn Ñ P, deduz-se de (9),
limQn “ limPnlimRn
“ P
R“ Q ‰ 0.
Então, como no caso das séries, vê-se facilmente que os produtos de ter-
mos maiores que 1, Rn, e os produtos dos termos menores que 1, Qn, for-
mando duas sucessões monótonas, os seus limites não dependem da ordem
dos fatores; portanto, o produto infinito (2) não se altera quando se muda a
ordem dos fatores de uma maneira arbitrária.
Exercícios e complementos
1. Dada uma sucessão tanu, e considerada uma sucessão qualquer de
números naturais todos distintos, n1, n2, . . . , nm, . . . dizemos que a sucessão
an1 , an2 , . . . , anm, . . .
é extraída da sucessão dada. Mostrar que se uma sucessão tem um limite,
toda sucessão extraída dessa tem o mesmo limite.
2. Demonstrar que se uma sucessão tanu tem um ponto limite b, existe
uma sucessão extraída de tanu que tem limite b (b pode ser finito ou infinito).
3. (TEOREMA DE CESARO). Sendo a1, . . . , an, . . . uma sucessão real
qualquer e b1, . . . , bn, . . . uma sucessão crescente e divergente, então da
existência do limite
liman ´ an´1
bn ´ bn´1“ L
segue-se
liman
bn“ L.
(Pela hipótese, a cada ε ą 0 corresponde N tal que para n ě N se tenha´
L´ ε
2
¯
pbn ´ bn´1q ď an ´ an´1 ď´
L` ε
2
¯
pbn ´ bn´1q;
escrevendo essas desigualdades para n “ N ` 1, N ` 2, . . . , m, somando e
dividindo por bm, obtém-se
´
L´ ε
2
¯
ˆ
1 ´ bN
bm
˙
` aN
bmď am
bmď
´
L` ε
2
¯
ˆ
1 ´ bN
bm
˙
` aN
bm

26 V. SUCESSÕES E SÉRIES NUMÉRICAS
e como bm Ñ 8, os membros extremos destas desigualdades tendem respec-
tivamente para L ´ ε2 e L ` ε2, logo existe um M tal que para m ě M se
tenha
L´ ε ď am
bmď L` ε
o que demonstra o teorema.)
4. Sendo tanu e tbnu duas sucessões infinitésimas, sendo a segunda sem-
pre decrescente, se existir o limite de pan´1 ´ anqpbn´1 ´ bnq, o mesmo
limite se obtém para a razão anbn.
5. Dada a sucessão tanu, se existe o limpan ´ an´1q, temos
liman
n“ limpan ´ an´1q.
6. Se a sucessão tanu é convergente e tem limite L, também têm o mesmo
limite a média aritmética pa1 ` ¨ ¨ ¨ `anqn e, se os an forem todos positivos,
a média geométrican?a1 . . .an
(cujo logaritmo é a média aritmética dos logar). (Basta substituir, no pro-
blema anterior, an pela soma a1 ` ¨ ¨ ¨ ` an.)
7. Se os an (n “ 1, 2, . . . ) são positivos e existe o limite da razão
an´1an, temos o mesmo limite para
n?an.
8. Se uma função fpxq é contínua num ponto x0 do seu campo de defini-
ção, dada qualquer sucessão x1, x2, . . . de pontos desse campo, com limite x0,
a sucessão fpx1q, fpx2q, . . . tem limite fpx0q. Para demonstrar, por absurdo, a
recíproca desse teorema, é necessário fazer uso do postulado de ZERMELO,
segundo o qual, dada uma sucessão de conjuntos C1, C2, . . . , pode-se definir
uma correspondência unívoca entre cada conjunto Cn e um elemento de Cn.
Admitamos então a condição enunciada acima; se a função não fosse contí-
nua, haveria um número ε ą 0 tal que em cada entorno pδq de x0 se poderia
determinar um ponto x para o qual seria
|fpxq ´ fpx0q| ě ε.
Tomando uma sucessão infinitésima de valores de δ, poderíamos então
construir uma sucessão de pontos xn que não satisfariam à condição admi-
tida.
9. Dadas duas séries de termos positivos,ř
an eř
bn, se, a partir de
um certo índice, temos an`1an ď bn`1bn, então se a segunda série é
convergente, a primeira também o é, e se a primeira é divergente, a segunda
também o é.

EXERCÍCIOS E COMPLEMENTOS 27
10. Demonstrar que para todo valor real de a, temos
ea “ lim´
1 ` a
n
¯n
“ 1 ` a` a2
2!` a3
3!` . . .
e que a série obtida é absolutamente convergente (conforme Capítulo IV,
parágrafo 18).
11. Demonstrar, por meio da série precedente, que para x ą 0, temos
ex ą 1p1 ´ xq, e concluir que para x ‰ 0 temos sempre ex ą 1 ` x.12. Demonstrar a convergência e calcular a soma da série
ř
1npn` 1q.13. Achar o limite da sucessão t
?an2 ` bn` c´
?an2 ` dn` eu.
14. Demonstrar que se da série harmônica suprimimos todos os termos
que contém o algarismo 0 no denominador obtemos uma série convergente
(basta notar que o número de termos da série obtida, compreendidos entre
10´n`1 e 10´n é igual ao número de arranjos com repetição de 9 algarismos,
n a n; agrupando esses termos, obtém-se uma série minorante em relação a
uma série geométrica convergente).
15. Determinar o caráter de convergência ou divergência das seguintes
séries:
a)ÿ n
an´1 ;
b)ÿ 1nan
;
c)ÿ n!na
;
d)ÿ 1
qa
Ppnq(sendo Ppxq um polinômio de grau p, sem zeros inteiros).
16. Demonstrar a convergência da série cujo termo geral é
tga?n
´ sena?n
em que a não é múltiplo de π2.
17. Deduzir do critério de RAABE (§ 6, d) o seguinte critério: Se na série
de termos positivosř
an a razão de um termo ao precedente se pode pôr, a
partir de certo índice, sob a forma
an`1
an“ 1 ´ p
n` An
n1`r

28 V. SUCESSÕES E SÉRIES NUMÉRICAS
em que An é limitado, r ą 0 e p é constante, a série é convergente para p ą 1
e divergente para p ď 1.
18. Aplicar o teorema precedente às séries em que a razão mencionada é
uma função racional de n, com limite 1;
an`1
an“ nm ` b1n
m´1 ` . . .nm ` c1nm´1 ` . . .
.
19. Admitindo conhecida a igualdade 1 ´ 12 ` 1
3 ´ 14 ` ¨ ¨ ¨ “ log 2, de-
monstrar o seguinte resultado:
1 ´ 12
´ 14
` 13
´ 16
´ 18
` 15
´ 110
´ 112
` ¨ ¨ ¨ “ 12
log 2;
(basta calcular o valor de 1n
´ 12n ´ 1
2n`2 , para n ímpar).
20. Calcular o limite do produto infinitoś
p1 ` x2nq.21. Demonstrar a convergência do produto infinito
ź
ˆ
1 ´ a2
n2
˙
,
para valores não inteiros de a.
22. Demonstrar, pela fórmula do produto de séries, que, quaisquer que
sejam os números complexos a e b, temos8ÿ
0
an
n!
8ÿ
0
bn
n!“
8ÿ
0
pa` bqnn!
.
CAPÍTULO VI
Derivadas
§ 1. Definição. Derivadas sucessivas. Seja y “ fpxq uma função definida
em um intervalo a $% b. Em muitos problemas de cálculo é necessário estu-
dar o comportamento dessa função somente nas vizinhanças de um ponto x0
desse intervalo. Para isso, estuda-se diretamente o acréscimo ou incremento
∆y “ y ´ y0 “ fpxq ´ fpx0q dessa função, correspondente ao acréscimo
∆x “ x´ x0 da variável independente. Um dos dados mais importantes para
esse estudo, resulta da consideração da razão incremental
∆y
∆x“ fpxq ´ fpx0q
x´ x0
relativa ao ponto x0. Esta razão é uma função de x, definida em todos os
pontos de a $% b, com exceção de x0. Quando esta razão tem, para x Ñ x0,
ou ∆x Ñ 0, um limite finito chama-se este limite derivada da função fpxq no
ponto x0, e se indica com a notação f 1px0q; diz-se neste caso que a função
fpxq é derivável no ponto x0. Vê-se imediatamente que a derivada de uma
constante é nula, pois o seu acréscimo, e portanto a razão incremental, é
nula qualquer que seja ∆x. Também se vê facilmente que a derivada da
função linear y “ ax` b, em que a e b são constantes, é igual a a.
Note-se que da identidade
y´ y0 “ ∆y
∆x∆x py0 “ fpx0qq
segue-se que, se existe a derivada f 1px0q, limite (finito) do primeiro fator no
segundo membro, quando x tende a x0, y tende a y0, o que mostra que se
uma função é derivável em um ponto, ela é contínua nesse ponto. A recíproca
desta proposição, porém, não é verdadeira, pois existem muitos exemplos de
funções contínuas sem derivada (vd. exercícios).
Se a função fpxq é derivável em todos os pontos de a e b, temos nesse in-
tervalo uma nova função definida e monódroma, que é f 1pxq. Esta se chama
29
30 VI. DERIVADAS
função derivada, ou simplesmente derivada de fpxq, e se indica, indiferente-
mente, com uma qualquer das notações
y 1 ou f 1pxq pLAGRANGEqDy ou Dfpxq pCAUCHYqdy
dxou
dfpxqdx
pLEIBNIZq
9y ou 9fpxq pNEWTONq
sendo esta última usada atualmente só em Mecânica Racional, quando a
variável independente é o tempo.
Se esta nova função tem uma derivada, esta se chamará a segunda deri-
vada de fpxq e se indica com
f2pxq “ D2fpxq “ d2y
dx2 “ :fpxq.
Analogamente se podem definir, se existem, a terceira, a quarta, . . . enfim,
a enésima derivada ou derivada de ordem n de fpxq:
fpnqpxq “ Dnfpxq “ dny
dxn;
diz-se então que a função dada é derivável até à ordem n, nos pontos em que
existe essa derivada, o que tem como consequência a continuidade, nesses
pontos, de cada uma das derivadas de ordem menor que n.
O conceito de derivada pode-se estender ao caso em que fpxq é definida
em um conjunto linear qualquer C, desde que x0 seja ponto de acumulação
de C e pertence a C.
§ 2. Interpretação geométrica. Quando se considera a curva de equação
(1) y “ fpxq
a derivada f 1pxq tem uma significação importante, cujo estudo foi aliás um
dos pontos de partida para a introdução desse conceito. Fixado nessa curva
um ponto P0, de coordenadas x0 e y0 “ fpx0q, a cada valor x ‰ x0 corres-
ponde um ponto P da curva, e portanto, uma secante P0P, cujo coeficiente
angular é dado, em grandeza e sinal, como se vê pela figura, justamente pela
razão
(2)QP
P0Q“ y´ y0
x´ x0“ ∆y
∆x.
Se x tende a x0, o ponto P da curva tende a P0, e se a razão (2) tem um
limite finito f 1px0q ou y 1, a reta P0T de coeficiente angular y 1 é a posição

VI. DERIVADAS 31
O x
y
P0
P
Q
T
x0 x0 ` ∆x
limite para a qual tende a secante variável P0P, isto é, P0T é a tangente à
curva (1), e a sua equação, em coordenadas correntes X e Y é
(3) Y ´ y0 “ y 1pX´ x0q.
No caso de eixos retangulares, a derivada y 1 no ponto x0 é igual à tan-
gente trigonométrica do ângulo que faz com o eixo Ox a tangente à curva no
ponto x0, y0. Neste caso, a equação da normal é
(4) X´ x0 “ y 1pY ´ y0q “ 0.
Se a razão (2) tem limite infinito para x Ñ x0, isto corresponde eviden-
temente a uma tangente paralela a Oy, de equação X “ x0; neste caso, se os
eixos são retangulares, a normal é a paralela a Ox, de equação Y “ y0.
Vemos assim que a condição necessária e suficiente para que uma curva
de equação (1) tenha tangente única em um seu ponto P0px0, y0q é que a
razão incremental ∆y∆x relativa ao ponto x0 tenha limite para ∆x Ñ 0.
Para que a tangente não seja paralela ao eixo Oy é necessário e suficiente que
esse limite seja finito, isto é, que fpxq seja derivável no ponto x0.
O problema da determinação da tangente pode ser posto sob uma forma
mais simétrica e elegante quando a curva é dada em equações paramétricas.
Consideremos mais geralmente uma curva no espaço, lugar geométrico dos
pontos Pptq cujas coordenadas são dadas pelas equações
(5) x “ xptq y “ yptq z “ zptq
em que os segundos membros são funções contínuas e deriváveis de t em
um intervalo a $% b. Dados dois valores t e t ` ∆t nesse intervalo, a esses
valores correspondem dois pontos da curva: P “ Pptq e P 1 “ Ppt ` ∆tq. A
corda que passa por esses pontos tem por equações, sendo X, Y, Z, as suas
coordenadas correntes,
X´ xptq∆x
“ Y ´ yptq∆y
“ Z´ zptq∆z
,

32 VI. DERIVADAS
fazendo-se a convenção que se um dos denominadores é nulo, deve ser nulo
o numerador correspondente (exclui-se naturalmente o caso em que os três
denominadores se anulam simultaneamente, isto é, em que os pontos P e P 1
coincidem). Dividindo-se os três denominadores por ∆t e fazendo ∆t Ñ 0,
vemos que a corda PP 1 tem uma posição limite bem determinada, que é a
tangente à curva no ponto P, a qual tem por equações
(6)X´ xptqx 1ptq “ Y ´ yptq
y 1ptq “ Z´ zptqz 1ptq
em que fazemos a mesma convenção anterior, relativa ao anulamento de um
dos denominadores.
Se o parâmetro é uma das coordenadas, x por exemplo, temos a curva
definida pelas equações y “ fpxq, z “ gpxq, cuja tangente, no ponto corres-
pondente à abcissa x, é a reta de equações
Y ´ y “ f 1pxqpX´ xq, Z´ z “ g 1pxqpX´ xq.
Se a curva é plana, basta fazer nas equações anteriores, zptq “ 0.
§ 3. Interpretação mecânica da primeira e da segunda derivada. Supo-
nhamos que um ponto móvel P se desloque sobre uma reta. O seu movi-
mento pode ser descrito perfeitamente, dando-se o valor da abcissa x de P
(referida a uma certa origem O e a uma unidade de medida) correspondente
a cada instante t (sendo o tempo contado também a partir de um instante
inicial 0). Supomos assim que seja dado o espaço x em função do tempo t
pela relação
(1) x “ fptq
que se chama lei do movimento.
Sendo P0 a posição no tempo t0 e P, a posição no tempo t, chama-se
velocidade média do ponto entre os instantes t0 e t, o quociente
xptq ´ xpt0qt´ t0
;
o limite desse quociente para t Ñ t0 (quando existe) é por definição a velo-
cidade do ponto P no instante t0, e o seu valor é dado pela derivada x 1ptq,ou 9xptq, segundo a notação de NEWTON, comumente usada em Mecânica
Racional. Temos assim, em cada ponto P uma velocidade vptq “ 9xptq, que
é também uma função de t; a sua derivada v 1ptq, isto é, a derivada segunda
x2ptq ou :xptq do espaço em relação ao tempo, que é o limite da razão do
acréscimo de velocidade para o intervalo de tempo decorrido, quando este
intervalo tende a zero, é a aceleração do ponto móvel no instante t. A noção
VI. DERIVADAS 33
de velocidade num instante dado, foi que levou NEWTON, no século 17, a
introduzir na Matemática o conceito de derivada.
Mais geralmente, suponhamos que o ponto P se desloque no espaço,
sendo conhecida a sua posição em cada instante t, o que equivale a dizer que
é conhecia a lei de movimento expressa pelas equações seguintes, que dão as
coordenadas cartesianas ortogonais de P em função do tempo:
(2) x “ xptq y “ yptq z “ zptq
as quais podem ser reunidas na única equação P “ Pptq. Estas equações (2)
podem ser consideradas como as equações paramétricas de uma curva, que é
a trajetória de P.
A dois instantes sucessivos t e t ` ∆t, correspondem duas posições Pptqe Ppt ` ∆tq, e o deslocamento de P é representado pelo vetor ∆P “ Ppt `∆tq ´ Pptq, de componentes ∆x, ∆y, ∆z. A velocidade média é então repre-
sentada pelo vetor ∆P∆t, de componentes ∆x∆t, ∆y∆t, ∆z∆t, e se as
três funções (2) têm derivadas no ponto t, está determinado o vetor P 1ptq,de componentes x 1ptq, y 1ptq, z 1ptq, que representa a velocidade de P nesse
instante; do parágrafo anterior se deduz então que essa velocidade é sempre
paralela à tangente à trajetória de P, no ponto correspondente ao instante
dado.
Suponhamos que existam as segundas derivadas de xptq, yptq, zptq. Se
considerarmos o vetor diferença das velocidades P 1pt`∆tq ´P 1ptq entre dois
pontos, dividindo por ∆t e passando ao limite para ∆t Ñ 0, obtemos ana-
logamente o vetor P2ptq, de componentes x2ptq, y2pyq, z2ptq, que se chama
aceleração do ponto no instante t.
§ 4. Derivada à esquerda e à direita. Números derivados. Chama-se de-
rivada à esquerda de uma função fpxq num ponto x0 do seu campo de defini-
ção C, o limite à esquerda, quando existe e é finito, da razão incremental de
fpxq relativa a x0. Neste caso, x0 deve ser ponto de acumulação à direita de
C. Analogamente se define a derivada à direita. Se x0 é ponto de acumulação
à direita e à esquerda, se existe a derivada f 1px0q, existirão evidentemente as
duas derivadas acima, tendo as duas o mesmo valor f 1px0q; mas estas duas
podem ambas existir e ser diferentes, como acontece, por exemplo, no ponto
0, para a função
y “
$
’
&
’
%
xe1x
e1x ` 1(para x ‰ 0)
0 (para x “ 0)

34 VI. DERIVADAS
com efeito, sendo aqui
∆y
∆x“ y
x“ e1x
e1x ` 1
vemos que essa razão tende a 1, se x Ñ 0` e a zero, se x Ñ 0´; o seu gráfico
é pois uma curva que passa pela origem, mas que tem neste ponto duas
tangentes distintas; um ponto nestas condições chama-se ponto anguloso da
curva.
Enfim, pode-se dar o caso em
que, embora a função fpxq seja con-
tínua no ponto x0, não existe limite
à esquerda nem limite à direita da
razão incremental de fpxq em x0. Em
qualquer caso, porém, se x0 é ponto
de acumulação tanto à direita como
à esquerda, existirão os quatro nú-
mero le, Le, ld e Ld, definidos no § 22 do Capítulo IV, relativos à função
fpxq ´ fpx0qx´ x0
.
Esses quatro números chamam-se, respectivamente, número derivado in-
ferior e superior à esquerda de x0 e número derivado inferior e superior à
direita de x0. Quando, e somente quando esses quatro números coincidem
e têm um valor finito, existirá a derivada f 1px0q, que terá esse valor comum.
Verifica-se, por exemplo, que para a função y “ x sen 1x (“ 0 para x “ 0),
os números derivados superiores tanto à direita como à esquerda de x “ 0
têm o valor `1, e os inferiores, o valor ´1.
§ 5. Regras de derivação. Os teoremas que se seguem, baseados nos te-
oremas sobre limites, valem tanto para a derivada como para a derivada à
esquerda e à direita das funções consideradas.
Sejam y e z duas funções de x definidas num mesmo intervalo e deri-
váveis (e portanto contínuas) num mesmo ponto x. Vamos demonstrar as
igualdades:
a) Dpy˘ zq “ y 1 ˘ z 1;
b) Dky “ kDy (k constante);
c) Dyz “ yz 1 ` zy 1;
d) Dy
z“ zy 1 ´ yz 1
z2 (para z ‰ 0 no ponto x).
As regras a) e b) exprimem que a operação de derivação de uma função
é uma operação linear, isto é, distributiva em relação à soma e permutável
com o produto por uma constante.

VI. DERIVADAS 35
Para a demonstração, indiquemos em geral com ∆f o incremento de uma
função f, relativo ao incremento ∆x da variável independente. Temos assim,
a)
∆py˘ zq∆x
“ py` ∆yq ˘ pz` ∆zq ´ py˘ zq∆x
“ ∆y
∆x˘ ∆z
∆x
e passando ao limite, para ∆x Ñ 0, temos a primeira fórmula, a qual se
estende a um número finito qualquer de parcelas.
b)
∆ky
∆x“ kpy` ∆yq ´ ky
∆x“ k
∆y
∆xÑ k
dy
dx
c)
∆yz
∆x“ py` ∆yqpz` ∆zq ´ yz
∆x“ y∆z` z∆y` ∆y∆z
∆x“
“ y∆z
∆x` z∆y
∆x` ∆y ¨ ∆z
∆x
e como no último termo um dos fatores tem limite finito e o outro tem limite
0, deduz-se imediatamente a fórmula c).
d)
∆y
z∆x
“y` ∆yz` ∆z ´ y
z∆x
“z∆y
∆x´ y∆z
∆xzpz` ∆zq
e como z ` ∆z tende a z, que por hipótese é diferente de zero, passando ao
limite obtemos a fórmula d).
Vejamos como se generaliza a regra de derivação do produto. Seja
y “ y1y2 . . .yn
um produto de funções definidas num mesmo intervalo e deriváveis num
ponto x. Para o acréscimo ∆y, temos
∆y “ py1 ` ∆y1qpy2 ` ∆y2q . . . pyn ` ∆ynq ´ y1y2 . . .yn ““ ∆y1 ¨ y2 . . .yn ` y1 ¨ ∆y2y3 . . .yn ` ¨ ¨ ¨ ` y1y2 . . .yn´1∆yn ` . . .
No último membro estão escritos apenas termos que são de 1º grau em
∆y1, ∆y2, . . . , ∆yn. Dividindo por ∆x, o mesmo raciocínio empregado no
caso de dois fatores mostra que todos os termos seguintes tem limite 0 para
∆x Ñ 0 e portanto temos
(1) y 1 “ y 11 ¨ y2 . . .yn ` y1 ¨ y 1
2 ¨ y3 . . .yn ` ¨ ¨ ¨ ` y1y2 . . .yn´1 ¨ y 1n

36 VI. DERIVADAS
Desta regra se deduz facilmente a regra de derivação de um determinante.
Seja
A “
∣
∣
∣
∣
∣
∣
∣
∣
y11 . . . y1n...
. . ....
yn1 . . . ynn
∣
∣
∣
∣
∣
∣
∣
∣
“ÿ
p´1qpy1p1 . . .ynpn
um determinante cujos elementos sejam todos funções deriváveis de x. Apli-
cando a regra de derivação (1) a cada um dos termos do desenvolvimento e
somando os resultados pela regra de derivação da soma, temos
A 1 “
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
y 111 y 1
12 . . . y 11n
y21 y22 . . . y2n...
.... . .
...
yn1 yn2 . . . ynn
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
`
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
y11 y12 . . . y1n
y 121 y 1
22 . . . y 12n
......
. . ....
yn1 yn2 . . . ynn
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
` ¨ ¨ ¨
¨ ¨ ¨ `
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
y11 y12 . . . y1n
y21 y22 . . . y2n...
.... . .
...
y 1n1 y 1
n2 . . . y 1nn
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
isto é, a derivada de um determinante de ordem n é a soma de n determi-
nantes, cada um dos quais é obtido do determinante dado substituindo os
elementos de uma linha (ou coluna) pelas suas derivadas.
Voltemos à fórmula (1). Sempre que tivermos y ‰ 0, dividindo ambos os
membros dessa igualdade por y “ y1y2 . . .yn vem
(2)y 1
y“ y 1
y1` y 1
y2` ¨ ¨ ¨ ` y 1
yn
Por uma razão que daremos adiante, a expressão y 1y chama-se derivada
logarítmica da função y. Obtivemos assim o teorema:
A derivada logarítmica de um produto é a soma das derivadas logarítmi-
cas dos fatores.
Aliás, se pusermos y “ y1y2, supondo que nem y1 nem y2 se anulem,
da igualdade já demonstrada
y 1 “ y2y11 ´ y1y
12
y22
se deduz facilmente
(3)y 1
y“ y 1
1
y1´ y 1
2
y2
isto é, a derivada logarítmica de um quociente é a diferença entre a derivada
logarítmica do dividendo e a do divisor.
VI. DERIVADAS 37
§ 6. Derivada de função de função e de função inversa. As seguintes re-
gras são de aplicação constante no cálculo das derivadas.
Função de função. Seja y “ ϕpxq uma função definida num intervalo
a $% b, contínua e derivável num ponto x0; ponhamos y0 “ ϕpx0q. Seja
também u “ fpyq uma função definida no conjunto I de valores que toma y
ao variar de x em a $% b. Já vimos que se fpyq é contínua no ponto y0, a
função de função u “ fpϕpxqq é também contínua em x0. Suponhamos agora
que a função fpyq seja também derivável no ponto y0, e vamos demonstrar
a existência e ao mesmo tempo estabelecer o processo de cálculo de derivada
de u em relação a x. Para isto temos três casos a considerar:
a) Suponhamos que em um entorno α de x0, tenhamos, para x ‰ x0,
y ‰ y0. Neste caso temos, empregando os incrementos ∆u e ∆y ‰ 0 corres-
pondentes a x “ x´ x0,∆u
∆x“ ∆u
∆y¨ ∆y∆x
e como para x Ñ x0 cada fator do segundo membro tem um limite, temos
(1)du
dx“ du
dy¨ dydx
“ f 1py0q.ϕ 1px0q.
b) Se houver um entorno α de x0 dentro do qual se tenha constantemente
∆y “ 0, teremos também para qualquer ponto x de α, ∆u “ 0, e portanto as
duas derivadas dudx e dydx são nulas, o que está de acordo com a fórmula
(1).
c) Suponhamos finalmente que em qualquer entorno de x0 haja pontos
em que y “ y0 e pontos em que y ‰ y0; chamemos C e D, respectivamente,
os conjuntos desses pontos; em ambos esses conjuntos x0 é ponto de acumu-
lação, e como eles fazem parte de a $% b
ϕ 1px0q “ limxÑx0
∆y
∆x“ lim
xÑx0 pCq
∆y
∆x“ lim
xÑx0 pDq
∆y
∆x
mas no campo C a razão ∆y∆x é constantemente nula, donde ϕ 1px0q “ 0.
Além disto, no conjunto C está satisfeita a hipótese b) e no conjunto D, a
hipótese a). Em ambos esses conjuntos, o limite da razão incremental ∆u∆xé igual a zero, o que demonstra que ainda neste caso se aplica a fórmula
(1), isto é, a derivada de uma função de função é igual ao produto das de-
rivadas das funções componentes. Este teorema se estende evidentemente
a um número qualquer de funções componentes, isto é, sendo y “ f1py1q,y1 “ f2py2q, . . . , yn “ fpxq, se todas as funções f são deriváveis nos pontos
correspondentes ao ponto x, temos
dy
dx“ f 1py1q.f 1
2py2q. . . . .f 1npynq.f 1pxq.

38 VI. DERIVADAS
Função inversa. Seja y “ fpxq uma função definida num intervalo, con-
tínua e com derivada diferente de zero num ponto x0. Se, nos pontos de
um entorno de x0, esta função é crescente (ou decrescente), a função inversa
x “ ϕpyq é também derivável no ponto y0 “ fpx0q e a sua derivada é o
recíproco da derivada f 1px0q.Com efeito, já vimos que, na hipótese feita, existe a função inversa ϕpyq
que toma o valor x0 para y “ y0, e que é contínua e crescente (ou decres-
cente) num entorno de y0. Como a ∆x ‰ 0 corresponde ∆y ‰ 0, e como ∆x
e ∆y tendem a zero ao mesmo tempo, temos
lim∆yÑ0
∆x
∆y“ lim
∆xÑ0
1∆y∆x
“ 1f 1px0q
conforme queríamos demonstrar. No cálculo da derivada, é conveniente, em
geral, substituir x0 pelo seu valor em função de y0; desta maneira, se obtém
a derivada de uma função de y como uma nova função da mesma variável
independente.
Se fosse f 1px0q “ 0, teríamos evidentemente, nas mesmas hipóteses do
teorema,
limyÑ0
∆x
∆y“ 8.
Todos esses resultados têm uma significação geométrica evidente, cujo
estudo deixamos a cargo do leitor.
§ 7. Derivadas das funções racionais. Para o cálculo das derivadas das
funções elementares aplicam-se, além das regras de cálculo de limites, as re-
gras de derivação a) a d) e a fórmula (1) do § 5. Assim, aplicando-se esta
fórmula ao caso y1 “ y2 “ ¨ ¨ ¨ “ yn “ x, isto é, a função y “ xn, e
lembrando o resultado dxdx “ 1, temos, para qualquer número real x,
(1) Dxn “ nxn´1
igualdade que também vale, evidentemente, para n “ 1 e n “ 0.
Se y é um polinômio em x,
y “ a0xn ` a1x
n´1 ` ¨ ¨ ¨ ` an´1x` an,
temos
y 1 “ na0xn´1 ` pn´ 1qa1x
n´2 ` ¨ ¨ ¨ ` an´1
isto é, a derivada de um polinômio de grau n em x é um polinômio de grau
n ´ 1. Derivando sucessivamente, temos, indicando com yppq a derivada de

VI. DERIVADAS 39
ordem p de y
y2 “ npn´ 1qa0xn´2 ` . . .
yppq “ npn´ 1q . . . pn´ p` 1qa0xn´p ` . . . pp ă nq
e finalmente,
ypnq “ na0
ypn`1q “ 0.
A derivada na de um polinômio de grau n é, pois, uma constante. De-
monstraremos mais adiante a recíproca deste teorema (§ 18).
A regra de derivação de um quociente permite achar a derivada de qual-
quer função racional. Em particular, para y “ 1xn “ x´n, acha-se
Dx´n “ y 1 “ ´nxn´1
x2n “ ´nx´n´1
que não é mais que a fórmula (1), que é válida, pois, para n inteiro relativo
qualquer.
OBSERVAÇÃO. Quando no quociente de duas funções o divisor é dado
como potência de outra função, é mais prático, para o cálculo da derivada,
escrever esse quociente sob forma de produto, usando expoente negativo. É
o que se pode verificar facilmente, derivando, segundo as regras já dadas, a
função
y “ 2x` 1px2 ´ 3q3 .
§ 8. Derivadas das outras funções elementares. Seja dada a função ex-
ponencial y “ ax (a ą 0), definida em todo o campo real. Dando-se a x um
acréscimo h, temos, para a razão incremental,
ax`h ´ axh
“ axah ´ 1h
e recordando um resultado do § 18, Capítulo IV, temos
(1) Dax “ ax loga.
Em particular, temos
Dex “ ex,
donde se deduz, para a derivada de ordem n qualquer,
Dnex “ ex.

40 VI. DERIVADAS
Pela regra de função inversa, temos, sendo y “ loga x (isto é, x “ ay)
y 1 “ D loga x “ 1ay loga
“ loga ex
em particular, se se trata de logaritmos neperianos (a “ e), temos
D log x “ 1x
.
Aplicando a regra de função de função, obtemos também
D logy “ 1y
¨ y 1 “ y 1
y,
o que justifica a denominação de derivada logarítmica dada à expressão y 1y.
Da igualdade logyc “ c logy (c constante) segue-se que a derivada logarít-
mica de uma potência é igual ao produto do expoente pela derivada logarít-
mica da função base.
Também se deduz, para c real qualquer e x ą 0, aplicando a regra de
função de função,
(2) Dxc “ Dec logx “ ec logx ¨ cx
“ cxc´1
que generaliza, para um expoente real qualquer, a fórmula (1) do § 7. É útil
conhecer de cor o caso particular
(3) D n?x “ Dx
1n “ 1
nx
1n´1 “ 1
nn?xn´1
,
fórmula que também se demonstra facilmente pela regra de função inversa.
Consideremos agora as funções v “ sen x e z “ cos x. Usando fórmulas
de trigonometria, obtemos
∆y
∆x“ senpx` ∆xq ´ sen x
∆x“ 2 cos
`
x` ∆x2
˘
sen ∆x2
∆x“
“ cos
ˆ
x` ∆x
2
˙
¨ sen ∆x2
∆x2
∆z
∆x“ cospx` ∆xq ´ cos x
∆x“ ´2 sen
`
x` ∆x2
˘
sen ∆x2
∆x“
“ ´ sen
ˆ
x` ∆x
2
˙
¨ sen ∆x2
∆x2
Fazendo-se ∆x tender a zero, o último fator tende a 1, e levando em conta
a continuidade das funções sen x e cos x vem
(4) y 1 “ D sen x “ cos x e z 1 “ D cos “ ´ sen x

VI. DERIVADAS 41
NOTA. A primeira das derivadas acima pode-se também escrever
D sen x “ sen´
x` π
2
¯
,
donde se tira, sucessivamente,
D2 sen x “ senpx` πq “ ´ sen x
. . . . . . . . . . . .
Dn sen x “ sen´
x` nπ2
¯
(5)
e analogamente
(6) Dn cos x “ cos´
x` nπ2
¯
.
Para as funções tg x e cot x, basta recordar a regra de derivação de um
quociente, obtendo-se
D tg x “ Dsen xcos x
“ cos2 x` sen2 x
cos2 x“ 1cos2x
D cot x “ Dcos xsen x
“ ´ sen x´ cos xsen2 x
“ ´ 1sen2 x
(7)
Consideremos finalmente as funções trigonométricas inversas:
y “ arcsen x, z “ arccos x, u “ arctg x,
sendo as duas primeiras definidas no intervalo ´1 $% `1, e a última em todo
o campo real. Como valor dessas funções, tomaremos sempre, para o seno
e a tangente, a determinação compreendida no intervalo ´π2 $% `π2, e
para o coseno a que está compreendida no intervalo 0 $% π. Pela regra de
derivação das funções inversas, temos, respectivamente,
y 1 “ D arcsen x “ 1cosy
“ 1a
1 ´ sen2 y“ 1
`?
1 ´ x2
z 1 “ D arccos x “ 1´ sen z
“ 1
´?
1 ´ cos2 z“ 1
´?
1 ´ x2
u 1 “ D arctg x “ cos2 u “ 11 ` tg2 u
“ 11 ` x2 .
Os sinais escritos antes do radical nas duas primeiras fórmulas justificam-
se, pois cosy é sempre positivo no intervalo ´π2 $% `π2, e sen x é sempre
positivo no intervalo 0 $% π.
Com o auxílio das derivadas calculadas até agora e das regras de deri-
vação dadas nos parágrafos 5 e 6 podemos calcular a derivada de qualquer
função composta com um número finito de operações elementares, aplicadas
às funções elementares.

42 VI. DERIVADAS
§ 9. Exemplos. Vejamos alguns exemplos interessantes de cálculo de de-
rivada e de derivadas sucessivas:
a) y “ fpxqgpxq, sendo fpxq e gpxq deriváveis e fpxq ą 0. Tomando o
logaritmo, temos
logy “ gpxq. log fpxq,y 1
y“ g 1pxq. log fpxq ` gpxqf
1pxqfpxq
donde
y 1 “ fpxqgpxq
"
g 1pxq log fpxq ` gpxqf1pxqfpxq
*
.
Aplicação:
Dptg xqcosx “ ptg xqcosxˆ
´ sen x log tg x` cos x1
cos2 x tg x
˙
“
“ ptg xqcosxˆ
1sen x
´ sen x log tg x
˙
.
b) y “ eax cosbx
y 1 “ eax.a. cosbx´ eax.b. senbx “
“a
a2 ` b2.eaxˆ
a?a2 ` b2
cosbx´ b?a2 ` b2
senbx
˙
;
como as dunas frações que aparecem no último parêntesis estão compreendi-
das entre ´1 e `1 e a soma dos seus quadrados é 1, pode-se determinar um
ângulo ϕ tal que essas frações sejam iguais, respectivamente, a cosϕ e senϕ.
Temos então
y 1 “a
a2 ` b2.eax cospbx`ϕq.
Uma nova derivação conduz ao resultado
y2 “ pa2 ` b2q.eax cospbx` 2ϕq
e é fácil demonstrar que temos, em geral,
ypnq “ pa2 ` b2qn2 eax cospbx` nϕq.
c)
y “ 3
c
log1 ´ sen x2
sen x2 .
Pondo
y1 “ x2, y2 “ seny1, y3 “ 1 ´ y2
y2, y4 “ logy3,

VI. DERIVADAS 43
teremos y “ 3?y4, donde, aplicando a regra de função de função
y 1 “ 1
3 3
b
y24
¨ 1y3
´1
y22
cosy1 2x “
“ ´23
x cos x2
sen2 x2 1 ´ sen x2
sen x23
d
ˆ
log1 ´ sen x2
sen x2
˙2“
“ ´23
x cot x2
p1 ´ sen x2q 3
d
ˆ
log1 ´ sen x2
sen x2
˙2.
Em geral é mais prático aplicar a regra de função de função diretamente,
sem escrever explicitamente as substituições efetuadas.
§ 10. Regra de LEIBNIZ. Esta fórmula permite achar diretamente qual-
quer das derivadas sucessivas de um produto y “ uv, uma vez admitida a
existência de todas as derivadas das funções u e v que forem necessárias.
Como já vimos, temos
y 1 “ uv 1 ` u 1v.
Derivando novamente, temos
y2 “ uv2 ` 2u 1v 1 ` u2v.
Ora, esta expressão pode ser representada por
puv 1 ` u 1vqp2q
em que o símbolo p2q indica que se deve obter o mesmo desenvolvimento
que no quadrado do binômio u0v1 `u1v0, substituindo sempre u0 por u, u1
por u 1, u2 por u2, e analogamente para v. Suponhamos que essa regra seja
válida até a derivada na, isto é, suponhamos que se tenha
ypnq “ puv 1 ` u 1vqpnq “ uvpnq `ˆ
n
1
˙
u 1vpn´1q ` ¨ ¨ ¨ `
`ˆ
n
p
˙
uppqvpn´pq ` ¨ ¨ ¨ ` upnqv.
(1)
Derivando novamente e tendo em conta a relaçãoˆ
n
p´ 1
˙
`ˆ
n
p
˙
“ˆ
n` 1p
˙
,
44 VI. DERIVADAS
temos
ypn`1q “ uvpn`1q `ˆ
n` 11
˙
u 1vpnq ` ¨ ¨ ¨ `ˆ
n` 1p
˙
uppqvpn´p`1q`
¨ ¨ ¨ ` upn`1qv “ puv 1 ` u 1vqpn`1q
e portanto a fórmula (1), que se chama fórmula de LEIBNIZ, é válida em
geral (desde que existam as derivadas de u e v até à ordem n).
§ 11. Funções com valores complexos. Como já vimos no Capítulo IV,
uma função com valores complexos, Fpxq não é mais que um par de funções
com valores reais.
Fpxq “ fpxq ` igpxq.
Para o cálculo das derivadas basta considerar i como uma constante su-
jeita à condição i2 “ ´1. Todas as definições e regras compatíveis com as
regras de operações sobre números complexos continuam válidas. Mas em
alguns casos, a consideração de tais funções é muito importante: tomemos
por exemplo a função
(1) y “ cos x` i sen x.
Derivando, vem
y 1 “ ´ sen x` i cos x “ ipcos x` i sen xq,
ou, empregando a notação exponencial já introduzida no Capítulo III,
Deix “ ieix,
isto é, a função dada se comporta, na derivação, como a função exponencial
eαx, para α real. Mais geralmente, tomemos a função
y “ epa`biqx “ eax.ebix.
Derivando como produto, pelas regras já dadas, (inclusive introduzindo
a variável auxiliar t “ bx), temos
y 1 “ a.eax.ebix ` eax.biebix “ pa` biqepa`biqx,
isto é, qualquer que seja o número complexo α, temos
(2) Deαx “ αeαx
donde se deduz
(3) Dneαx “ αneαx
VI. DERIVADAS 45
resultado que será de grande utilidade no estudo das equações diferenciais.
Este resultado justifica o uso da mesma letra e para representar as duas fun-
ções de natureza e definição essencialmente distintas, ex e eix. Da última
fórmula (3) se deduz facilmente o resultado do exemplo b) do § 9.
§ 12. Funções de variáveis complexas. Também se pode considerar uma
função de variável complexa Fpzq, sendo z “ x ` iy, com x e y reais. Como
já demos a noção de limite no campo complexo, podemos definir a derivada
de Fpzq como o limite da razão incremental
lim∆zÑ0
Fpz` ∆zq ´ Fpzq∆z
“ F 1pzq
quando esse limite existe e é finito. É fácil ver que as regras de derivação
relativas às operações elementares e a regra de função de função se aplicam
também neste caso; daqui se deduz que a derivada de um polinômio e de uma
função racional se fazem exatamente como no campo real.
Uma função de variável complexa que tenha derivada em um ponto do
seu campo de definição se diz monógena ou analítica no sentido de CAUCHY,
nesse ponto. A teoria das funções analíticas é uma das mais importantes da
Análise Matemática.
§ 13. Infinitésimos e infinitos. Ordem infinitesimal. Diz-se que uma fun-
ção y “ fpxq é infinitésima, ou que é um infinitésimo no ponto a, ou para
x tendendo a a, quando ela tem limite zero para x Ñ a. Para estas defini-
ções supõe-se naturalmente, que a seja ponto de acumulação do campo de
definição de fpxq. No estudo que se segue, supomos que os infinitésimos de
que se trata são funções monódromas de x, definidas num mesmo campo C
contido em um entorno de a, e diferentes de zero nos pontos de C distintos
de a. Neste caso, é sempre possível falar do inverso de um infinitésimo e do
quociente y1y2 de dois infinitésimos, pois esse quociente será também uma
função de x definida em todos os pontos de C distintos de a.
Se o quociente y1y2 de dois infinitésimos y1 e y2 tem um limite finito
e não nulo para x Ñ a, dizemos que eles têm a mesma ordem. Se o limite
é nulo, dizemos que y1 é de ordem maior que a de y2. Se o limite é infi-
nito, dizemos que y1 é de ordem menor que a de y2. A consideração da
razão inversa y2y1 mostra que nas mesmas hipóteses, y2 é de ordem respec-
tivamente igual, menor ou maior que a de y1. A igualdade entre as ordens
infinitésimas goza portanto da propriedade simétrica; a propriedade reflexiva
é evidente e a transitiva é imediata, pois de
limxÑa
y1
y2“ k ‰ 0 e lim
xÑa
y2
y3“ k 1 ‰ 0

46 VI. DERIVADAS
deduz-se
limxÑa
y1
y3“ kk 1 ‰ 0.
Da mesma maneira se demonstra que se a ordem y1 é maior que a de
y2 e a de y2 maior que a de y3, a ordem de y1 é maior que a de y3. Essas
relações de desigualdade entre as ordens infinitésimas servem para dar uma
medida da maior ou menor rapidez com que os infinitésimos tendem a zero,
enquanto x tende a a.
Chama-se soma das ordens infinitesimais de dois infinitésimos, a ordem
infinitesimal do seu produto. É fácil ver que se z1 e z2 são dois infinitésimos
de ordens respectivamente iguais às de y1 e y2, a ordem do produto z1z2 é
igual à de y1y2; basta notar que se cada uma das razões y1z1 e y2z2 tem
limite finito e diferente de zero, o mesmo se dá com o produto
y1
z1¨ y2
z2“ y1y2
z1z2;
isto prova que a soma de ordens infinitesimais que acabamos de definir não
depende das funções particulares y1 e y2, a que correspondem as ordens
dadas. Essa definição se estende imediatamente ao caso de várias ordens in-
finitesimais e verifica-se sem dificuldade que a soma goza das propriedades
comutativa e associativa. Se y1, y2, . . . , yn são infinitésimos da mesma or-
dem, a ordem do produto y1y2 . . .yn é igual a n vezes a ordem infinitesimal
comum e é igual também à ordem yn1 .
O último resultado se generaliza para um expoente c positivo qualquer,
dizendo que a ordem de yc é igual, por definição, a c vezes a ordem do
infinitésimo y.
As operações de diferença de duas ordens infinitesimais (quando a pri-
meira é maior que a segunda) e de divisão por um número real positivo se
definem pelas operações inversas.
Nas definições anteriores, pode-se dispensar a hipótese da existência dos
limites das razões y1y2; diz-se por exemplo que esses infinitésimos são de
mesma ordem, se essa razão está, em um entorno conveniente de a, compre-
endida entre dois números do mesmo sinal, e que a ordem de y1 é não menor
que a de y2, se existe um número k e um entorno de a dentro do qual, para
x ‰ a, seja |y1y2| ě k.
Também pode ser que os infinitésimos y1 e y2 não sejam confrontáveis,
como se dá por exemplo com as funções y1 “ x sen 1x e y3 “ x2, definidas
no campo real, excluindo os pontos x da forma 1nπ, pois a razão y1y2 “psen 1xqx tem limite máximo 8 e limite mínimo zero, para x Ñ 0.

VI. DERIVADAS 47
Vemos assim que a ordem infinitesimal tem todas as propriedades de
uma grandeza, pois para ela estão definidos os conceitos de igual, maior e
menor, assim como a operação soma, que é comutativa e associativa. Com
essas definições fica assim constituída uma espécie de Aritmética análoga à
dos números reais absolutos, mas com uma diferença essencial: nesta nova
Aritmética não é válido o teorema de ARQUIMEDES: existem com efeito,
pares de infinitésimos y e z tais que não é possível obter um múltiplo inteiro
da ordem de y maior que a de z. Basta, por exemplo, considerar os dois
infinitésimos y “ 1 log x e z “ x, e o resultado conhecido
limxÑ0
px log xq “ 0,
pois deste resultado se deduz, qualquer que seja n,
limxÑ0
z
yn“ lim
xÑ0xplog xqn “
"
limxÑ0
x1n log x
*n
“ nn. limxÑ0
´
x1n log x
1n
¯n
“ 0,
isto é, multiplicando-se por qualquer número inteiro n a ordem do infinité-
simo y obtém-se sempre uma ordem infinitesimal menor que a de z, o que
mostra que para esse par de ordens infinitesimais não se aplica o teorema de
ARQUIMEDES.
Quando o número a é finito, chamamos infinitésimo principal a função
x ´ a, e a ela atribuímos a ordem 1. Segundo a definição que demos atrás,
ao infinitésimo px ´ aqα (α ą 0) e a qualquer outro que tenha a mesma
ordem que este, deverá ser atribuída a ordem α.1 “ α. Desta maneira, uma
parte do conjunto das ordens infinitesimais é representada por números reais
absolutos, e é evidente que quanto às operações atrás definidas, essas ordens
estão em isomorfismo com os números reais correspondentes.
Em tudo quando precede supusemos a finito; mas é evidente que as mes-
mas considerações valem para x tendendo ao infinito, exceto quanto à defi-
nição do infinitésimo principal, que será neste caso a função 1x.Chama-se um infinito, para x Ñ a, qualquer função que tenha limite
infinito no ponto a. Podemos definir a ordem de infinito, como o fizemos
para a ordem infinitesimal, estabelecendo as seguintes relações (sendo y1 e
y2 dois infinitos quaisquer para x Ñ a):
Se
y “ limxÑa
y1
y2“ k ‰ 0,
y1 é da mesma ordem que y2;
Se
y “ limxÑa
y1
y2“ 8,

48 VI. DERIVADAS
y1 é de ordem maior que a de y2;
Se
y “ limxÑa
y1
y2“ 0,
y1 de ordem menor que a de y2.
Repetindo as mesmas considerações anteriores, podemos verificar todas
as propriedades da igualdade e das relações de maior e menor entre as ordens
de infinito; também se podem definir aqui a soma, diferença, assim como o
produto e quociente por um número real absoluto. Chama-se infinito prin-
cipal, quando a é finito, a função 1px´ aq, e quando a é infinito, a própria
variável x.
Os conceitos de ordem infinitesimal e da ordem de infinito podem, po-
rém, ser reunidos num só, introduzindo-se a ordem infinitesimal negativa.
Basta observar que o inverso de um infinitésimo é um infinito, e recipro-
camente. Chamando então ω a ordem infinitesimal de um infinitésimo y,
diremos que o infinito 1y tem ordem infinitesimal negativa ´ω. Também
se poderia considerar os infinitésimos como infintos de ordem negativa, mas
como no Cálculo Infinitesimal entram com muito maior frequência quanti-
dades infinitesimais, é preferível considerar como positivas as ordens destas
últimas. Enfim, pode-se definir a ordem infinitesimal zero, como sendo a
de qualquer função que tenha, para x Ñ a, um limite finito diferente de
zero. Com estas definições obtemos um conjunto parcialmente ordenado -
de ordens infinitesimais positivas, nulas e negativas - que compreende como
conjunto parcial o conjunto ordenado dos números reais relativos.
§ 14. Infinitésimos equivalentes. Diz-se que dois infinitésimos y e z são
equivalentes quando o seu quociente yz tem limite 1, para x Ñ a. Neste
caso, da condição
(1) limxÑa
y
z“ 1
deduz-se
(2) limxÑa
y´ zz
“ 0,
isto é, a diferença y ´ z “ h, ou é nula nos pontos x de um entorno de
a, ou é, no conjunto de pontos em que não se anula, um infinitésimo, para
x Ñ a, de ordem maior que a de z, ou de y, pois y e z são da mesma or-
dem. Reciprocamente, se a diferença y ´ z de dois infinitésimos é ou nula
ou de ordem maior que a de um deles, os dois infinitésimos são equivalentes,
pois da condição (2) se deduz (1). É evidente que a relação de equivalência
goza das propriedades reflexiva, simétrica e transitiva. Vê-se também que

VI. DERIVADAS 49
se y1 e y2 são infinitésimos equivalentes, respectivamente, a z1 e z2, o pro-
duto y1y2 e o quociente y1y2, quando este é infinitésimo, são equivalentes,
respectivamente, ao produto z1z2 e ao quociente z1z2, temos
limxÑa
y1y2
z1z2“ lim
xÑa
y1
z1¨ limxÑa
y2
z2“ 1
limxÑa
y1
y2:
z1
z2“ lim
xÑa
y1
z1: limxÑa
y2
z2“ 1.
Estas propriedades são muito úteis no cálculo de certos limites, pois per-
mitem substituir fatores infinitésimos por outros equivalentes que podem ser
de manejo mais fácil. Assim, por exemplo, se se trata do limite para x Ñ 0
de uma expressão que contenha um fator sen x, tg x, ex ´ 1 ou logp1 ` xq,podemos previamente substituir qualquer um desses infinitésimos pelo infi-
nitésimo x, que é equivalente a todos eles. É desnecessário observar que essa
substituição só se pode fazer quando o infinitésimo em questão está em fator
em toda a expressão cujo limite se procura.
§ 15. Diferencial. Dada uma função y “ fpxq, derivável num ponto x,
chama-se diferencial dessa função relativa a esse ponto, o produto da deri-
vada f 1pxq pelo acréscimo arbitrário ∆x da variável independente. Indica-se a
diferencial com a notação dy ou dfpxq. Aplicando-se esta definição à função
z “ x, sendo z 1 “ 1, temos dz “ dx “ ∆x, isto é, a diferencial da variável
independente coincide com o seu acréscimo arbitrário.
Voltemos à função y “ fpxq. Da relação
lim∆xÑ0
∆y
∆x“ f 1pxq
se deduz que a diferença ∆y∆x´ f 1pxq “ ε é um infinitésimo para ∆x Ñ 0.
Pondo então ε∆x “ α, que é infinitésimo de ordem maior que ∆x, temos
(1) ∆y “ f 1pxq∆x` α “ dy` α
isto é: a diferença entre o acréscimo da função e a sua diferencial, corres-
pondente ao mesmo incremento dx da variável independente, é sempre um
infinitésimo de ordem maior que a de dx. Se tivermos f 1pxq ‰ 0, a diferencial
dy é, como o acréscimo ∆y, um infinitésimo de primeira ordem em relação
a dx, e nesse caso dy e ∆y são infinitésimos equivalentes. Em caso contrário
(f 1pxq “ 0), a diferencial é nula.
A significação geométrica da diferencial é evidente, quando o gráfico de
função é uma curva no sentido comum, como a da figura abaixo. Como
já vimos, a derivada y 1 no ponto P é o coeficiente angular da tangente PT .
Daqui se deduz que a diferencial é dy “ y 1dx “ y 1.PQ “ QT , ao passo que,

50 VI. DERIVADAS
para o mesmo dx, temos QP 1 “ ∆y; além disto, temos
TP 1 “ QP 1 ´QT “ ∆y´ dy “ α
e portanto, a distância entre a tangente e a curva, contada sobre uma paralela
a Oy, é um infinitésimo de ordem superior a dx. Em outras palavras, para
o cálculo de infinitésimos de primeira ordem (desprezando-se os de ordem
superior) pode-se substituir a curva pela sua tangente.
O x x
y
P
P 1
QT
x` dx
A construção do Cálculo Infi-
nitesimal, como é universalmente
aceita atualmente, baseia-se no mé-
todo de NEWTON, que introduziu
a derivada de uma função como li-
mite da razão entre o acréscimo da
função e o da variável independente,
quando este último tende a zero.
A concepção de LEIBNIZ, que hoje
está inteiramente abandonada, baseia-se na sua teoria filosófica - a Mona-
dologia. Segundo esta teoria, toda curva seria formada de uma quantidade
infinitamente grande de segmentos retilíneos, cujas projeções sobre os eixos
seriam designadas dx e dy, sendo o coeficiente angular dydx de cada um
dos tais segmentos a derivada da função y “ fpxq que representa a curva. Do
método de LEIBNIZ se conservou o algoritmo, por ser de manejo mais fácil,
mas as quantidades dx e dy correspondem a conceitos inteiramente diferen-
tes: dx é o acréscimo arbitrário da variável independente, e dy é o produto
desse acréscimo pela derivada y 1.
Para achar a diferencial de uma função fpxq basta calcular a derivada e
multiplicá-la por dx. Esta operação de chama diferenciação. Das regras de
derivação e das derivadas das funções elementares se deduz assim, sendo y,
z, etc. funções deriváveis de x,
dpy` zq “ dy` dz, dyz “ ydz` zdy, dy
z“ zdy´ ydz
z2 ,
d logy “ dy
y, etc. . . .
Quando uma função é derivável, podemos dizer que ela é diferenciável.
Esta identidade de conceitos, porém, não se estende às funções de mais de
uma variável, como veremos no Capítulo 8.
Suponhamos que a função y “ fpxq seja definida num intervalo a $% b.
Neste caso, na expressão da diferencial y 1dx, podemos fixar dx e fazer x
variar no mesmo intervalo a $% b, contanto, naturalmente, que x ` dx

VI. DERIVADAS 51
também pertença a este intervalo. A diferencial dy pode portanto ser consi-
derada como uma nova função de x. A diferencial de dy, correspondente ao
mesmo acréscimo dx será
d.dy “ d2y “ f2pxqdx.dx “ f2pxqdx2
e chama-se segunda diferencial ou diferencial de segunda ordem de fpxq. A
diferencial de ordem n se define de um modo geral como a diferencial de
dn´1y, isto é, temos
dny “ fpnqpxqdxn;
daqui tiramos
fpnqpxq “ dny
dxn
onde o segundo membro pode ser encarado como um quociente, e não só
como símbolo da na derivada.
§ 16. Invariância da primeira diferencial. Uma propriedade importan-
tíssima da diferencial dy “ dfpxq consiste em conservar a mesma expressão
quando se faz uma mudança de variável x “ ϕptq, sendo ϕptq uma fun-
ção derivável de outra variável t, cujos valores, ao variar de t, pertençam
ao campo de definição de fpxq. Sejam t e x dois pontos correspondentes;
como já vimos, podemos então considerar y como função de t, fpϕptqq, cuja
derivada édy
dt“ f 1pxqϕ 1ptq,
logo, a diferencial de y, considerada como função de t é
dty “ f 1pxqϕ 1ptqdt.
Mas pela definição temos também ϕ 1ptqdt “ dx, donde
dty “ f 1pxqdx.
Vemos assim que a diferencial de y em relação a t é a mesma que em rela-
ção a x, quando a diferencial dx corresponde a dt. Por esta razão se diz que
a diferencial de uma função é um invariante em relação a qualquer mudança
de variável independente. Em consequência desta propriedade, qualquer re-
lação em que intervenham os valores de uma ou mais funções de uma mesma
variável e as suas diferenciais, conserva o mesmo aspecto qualquer que seja a
variável que se tome como independente. Por exemplo, as regras de diferen-
ciação dadas no parágrafo anterior são independentes da escolha da variável
independente. Em particular, em qualquer relação pode-se tomar como va-
riável independente uma das funções cuja diferencial figure na relação.

52 VI. DERIVADAS
É preciso notar, porém, que as diferenciais sucessivas, a partir da se-
gunda, não são mais invariantes em relação a uma mudança de variável.
Com efeito, quando consideramos x como função de outra variável t, a di-
ferencial dx não pode mais ser considerada como constante, pois é também
uma função de y, e a diferenciação de dy “ f 1pxqdx deve ser feita pela regra
de diferenciação de um produto:
d2ty “ f2pxqdx2 ` f 1pxqd2x,
e assim para as diferenciais seguintes.
§ 17. Teorema de ROLLE. Deste parágrafo em diante daremos as mais
importantes aplicações das derivadas para o estudo de funções definidas em
um intervalo. Quase todas essas aplicações foram descobertas logo depois
da criação do conceito de derivada, nos fins do século XVII e princípios do
século XVIII, principalmente por NEWTON, LEIBNIZ e seus continuadores,
os BERNOULLI, L’HOSPITAL, MACLAURIN, TAYLOR, etc.
Vamos primeiramente definir os conceitos de máximo e mínimo relativos.
Seja y “ fpxq uma função monódroma definida em um campo linear E e x0
um ponto de acumulação de C, contido neste campo. Diz-se que fpx0q é um
máximo relativo de fpxq, ou que x0 é um ponto de máximo para fpxq, quando
se pode determinar um entorno completo de x0 tal que para x ‰ x0 dentro
desse entorno se tenha
(1) fpxq ď fpx0q.
Se, nas mesmas condições, tivermos fpxq ě fpx0q, dizemos que fpx0q é
um mínimo relativo e x0 um ponto de mínimo. É evidente que se o campo
de definição é um conjunto denso em si, como no caso de função definida
em um intervalo, o máximo e o mínimo absolutos, se existem, são também,
respectivamente, máximo e mínimo relativos.
LEMA. Se uma função fpxq definida num intervalo é derivável num ponto
de máximo ou de mínimo interno a esse intervalo, a sua derivada é nula nesse
ponto.
Suponhamos, por exemplo, que fpx0q seja um máximo relativo e determi-
nemos um entorno α de x0 dentro do qual seja sempre satisfeita, para x ‰ x0,
a desigualdade (1).
Dentro desse entorno, teremos para x ą x0 e x ă x0, respectivamente,
fpxq ´ fpx0qx´ x0
ď 0 efpxq ´ fpx0qx´ x0
ě 0.

VI. DERIVADAS 53
Daqui se deduz
limxÑx0`
fpxq ´ fpx0qx´ x0
ď 0 e limxÑx0´
fpxq ´ fpx0qx´ x0
ě 0
e como esses limites devem ser iguais, temos forçosamente f 1px0q “ 0. A
mesma demonstração se repete para o caso do mínimo. Nada se pode afirmar
sobre um máximo ou mínimo em um extremo do intervalo de definição,
onde a derivada pode existir e não se anular. Se se trata de uma função que é
certamente derivável em todo o intervalo, o máximo ou mínimo, se existirem,
serão assumidos nos extremos ou em uma das raízes da equação f 1pxq “ 0.
TEOREMA DE ROLLE. Se uma função contínua num intervalo fechado
a $% b e derivável nos pontos internos ao mesmo tem valores iguais nos
extremos a e b, a sua derivada se anula ao menos em um ponto interno a
esse intervalo.
Com efeito, se fpxq é constante em todo o intervalo a $% b, a sua de-
rivada é nula em todos os pontos do mesmo. Em caso contrário, ao menos
um extremo é diferente de fpaq “ fpbq e portanto, pela continuidade de fpxq,esse extremo é assumido em um ponto ξ interno a a $% b, onde, pelo lema
anterior, teremos f 1pξq “ 0.
§ 18. Teorema de CAUCHY ou dos acréscimos finitos. Se fpxq e ϕpxqsão funções contínuas em todo o intervalo fechado a $% b e deriváveis nos
pontos internos, existe ao menos um ponto ξ interno ao intervalo, tal que
(1) f 1pξqrϕpaq ´ϕpbqs “ ϕ 1pξqrfpaq ´ fpbqs.
Basta considerar o determinante
Fpxq “
∣
∣
∣
∣
∣
∣
∣
fpxq ϕpxq 1
fpaq ϕpaq 1
fpbq ϕpbq 1
∣
∣
∣
∣
∣
∣
∣
que é também uma função contínua em a $% b e derivável nos pontos in-
ternos e que se anula para x “ a e x “ b. Pelo teorema de ROLLE, há um
ponto ξ interno a esse intervalo, onde se anula a derivada, que é, pela regra
de derivação de um determinante,
F 1pxq “
∣
∣
∣
∣
∣
∣
∣
f 1pxq ϕ 1pxq 0
fpaq ϕpaq 1
fpbq ϕpbq 1
∣
∣
∣
∣
∣
∣
∣
.
Desenvolvendo esse determinante segundo os elementos da primeira li-
nha e igualdando a zero para x “ ξ, obtemos (1). Se tivermos ao mesmo

54 VI. DERIVADAS
tempo ϕ 1pξq ‰ 0 e ϕpaq ‰ ϕpbq, temos
(2)fpbq ´ fpaqϕpbq ´ϕpaq “ f 1pξq
ϕ 1pξqisto é, neste caso, a razão dos acréscimos de fpxq e ϕpxq quando x passa de
a para b é igual à razão das derivadas em um mesmo ponto conveniente
interno a a $% b.
No caso particular importante em que ϕpxq “ x e portanto ϕ 1pxq “ 1,
temos
(3)fpbq ´ fpaqb´ a “ f 1pξq
isto é, a razão incremental de fpxq relativa ao ponto a e ao incremento b´ aé exatamente igual ao valor da derivada f 1pxq em um ponto conveniente do
intervalo a $% b. (Teorema de CAVALIERI ou do valor médio.)
O x
y
A
BC
a bξ
É fácil dar a interpretação ge-
ométrica deste teorema: considere-
mos a curva de equação y “ fpxq; o
primeiro membro de (3) é o coefici-
ente angular da cordaAB que liga os
pontos de abcissas a e b; a fórmula
(3) mostra que existe um ponto C
entre A e B sobre a curva (v. fi-
gura) no qual a tangente é paralela
à corda.
As fórmulas (2) e (3) se aplicam
evidentemente ao caso em que a ą b pois basta aplicar os teoremas acima ao
intervalo b $% a no qual se supõem preenchidas as condições enunciadas.
Sejam em geral x e x ` h dois pontos quaisquer. A condição de estar o
ponto ξ entre esses dois, equivale a dizer que ξ´x é de valor absoluto menor
e do mesmo sinal que h, isto é, que pondo ξ ´ x “ θh, temos 0 ă θ ă 1.
Sendo então x e x` h dois pontos quaisquer do intervalo a $% b, em que a
função fpxq é contínua e derivável, temos pela fórmula (3),
(4) fpx` hq ´ fpxq “ hf 1px` θhq, com 0 ă θ ă 1,
fórmula usada frequentemente, que é conhecida como fórmula dos acrésci-
mos finitos.
Aplicação: Se fpxq preenche as condições dos teoremas anteriores e se
a sua derivada é positiva em todo o intervalo aberto a $% b, essa função é
crescente em todo o intervalo a $% b. Com efeito, sendo x e x`h dois pontos

VI. DERIVADAS 55
distintos quaisquer de a $% b (inclusive os extremos), x ` θh é certamente
interno, logo f 1px` θhq ą 0. Segue-se de (4) que o acréscimo da função tem
o mesmo sinal que h, isto é, que fpxq é crescente.
Se a derivada se anula em um único ponto x0 interno a a $% b e é positiva
em todos os outros pontos internos, basta aplicar o teorema aos intervalos
a $% x0 e x0 $% b; sendo a função crescente nesses dois intervalos que têm
um único ponto comum x0, ela será crescente em todo o intervalo a $% b.
Esta conclusão se estende evidentemente a um número qualquer de pontos
isolados em que a derivada é nula.
Da mesma forma se demonstra que quando a derivada de uma função é
negativa em todos os pontos internos a um intervalo, salvo em um conjunto
discreto de pontos, essa função é decrescente em todo o intervalo.
Já vimos que a derivada de uma constante é nula. Reciprocamente, su-
ponhamos que a derivada de uma função fpxq seja nula em todos os pontos
de um intervalo aberto a $% b. Neste caso, sendo x e x ` h dois pontos
quaisquer desse intervalo, temos pela fórmula (4),
fpx` hq “ fpxq
isto é, a função fpxq é constante.
Se duas funções definidas num mesmo intervalo têm neste a mesma de-
rivada, a derivada de sua diferença é nula, e portanto as funções diferem
por uma constante. Daqui se deduz que se a derivada de uma função é um
polinômio de grau n
(5) a0xn ` a1x
n´1 ` ¨ ¨ ¨ ` an´1x` an pa0 ‰ 0q,
essa função é um polinômio de grau n ` 1, pois difere de uma constante do
polinômio
(6)a0
n` 1xn ` a1
nxn ` ¨ ¨ ¨ ` an´1
2x2 ` anx.
Aplicando esta propriedade repetidamente, chegamos à conclusão que
toda função cuja na derivada seja uma constante diferente de zero é um po-
linômio de grau n. Se a na derivada é nula, a função é um polinômio de grau
ď n ´ 1, donde se deduz que se as derivadas nas de duas funções são iguais
estas funções diferem por um polinômio de grau ď n´ 1.
§ 19. Regras de L’HOSPITAL. Frequentemente se encontram nas aplica-
ções de matemática, certas expressões cujo limite não se pode calcular com
a simples aplicação dos teoremas dados no Capítulo IV. Vamos considerar
neste parágrafo o caso mais simples, que é o do quociente de dois infinitési-
mos, para x Ñ a.

56 VI. DERIVADAS
Sejam fpxq e ϕpxq duas funções contínuas em todo o entorno direito a $% a ` ε de a e que se anulam no ponto a. Suponhamos mais, que essas
funções sejam deriváveis em todo o intervalo aberto a $% a ` ε e que se
tenha nesse intervalo ϕ 1pxq ‰ 0; desta última hipótese e do teorema de valor
médio ϕpxq ´ ϕpaq “ px ´ aqϕ 1pξq (a ă ξ ă x), deduz-se que o primeiro
membro é diferente de zero, isto é, que para todo o intervalo a $% a ` ε
temos ϕpxq ‰ 0.
Vamos então demonstrar que se existe o limite de f 1pxqϕ 1pxq para x Ña`, também existirá o limite de fpxqϕpxq, que será igual ao anterior. Com
efeito, temos pela fórmula de CAUCHY, na hipótese fpaq “ ϕpaq “ 0,
fpxqϕpxq “ fpxq ´ fpaq
ϕpxq ´ϕpaq “ f 1pξqϕ 1pξq pa ă ξ ă xq
mas quando x tende a a o mesmo acontece, evidentemente, com ξ, e por-
tanto, se o último membro tem um limite para ξ Ñ a`, temos
(1) limxÑa`
fpxqϕpxq “ lim
xÑa`
f 1pxqϕ 1pxq .
Se as duas funções f 1pxq e ϕ 1pxq tendem também a zero para x Ñ a` e se
elas satisfazem às hipóteses acima, temos também, se existir o
limxÑa` f2pxqϕ2pxq,
limxÑa`
f 1pxqϕ 1pxq “ lim
xÑa`
f2pxqϕ2pxq
e assim por diante. No cálculo efetivo de um limite por meio dessa regra,
repete-se este processo até se obter ou uma expressão cujo limite seja fácil
de calcular por meios elementares ou uma expressão que não tenha limite
para x Ñ a e neste caso a regra torna-se inútil, sendo preciso recorrer a
outros meios. Note-se que da existência do limite de f 1pxqϕ 1pxq se deduz a
do quociente fpxqϕpxq, mas não inversamente: este quociente pode ter um
limite sem que exista o limite do quociente das derivadas.
Se as condições acima estão satisfeitas em um entorno esquerdo de a,
deduz-se uma igualdade análoga a (1) para o limite à esquerda e portanto, de
um modo geral, supondo sempre a existência do limite no 2º membro, temos
limxÑa
fpxqϕpxq “ lim
xÑa
f 1pxqϕ 1pxq .
Note-se que no cálculo de um limite podem-se separar fatores com limi-
tes finitos que se calculam facilmente. Também se pode aplicar o princípio

VI. DERIVADAS 57
da substituição de infinitésimos equivalentes. Seja dada, por exemplo, a ex-
pressão
y “ senp1 ´ cos xqrlogp1 ` 3xqs2
que é evidentemente um quociente de infinitésimos, para x Ñ 0. Para cal-
cular o limite neste ponto, apliquemos a regra de L’HOSPITAL, calculando o
quociente das derivadas:
limxÑ0
y “ cosp1 ´ cos xq. sen x
2 logp1 ` 3xq ¨ 31 ` 3x
notemos agora que as expressões cosp1 ´ cos xq e p1 ` 3xq têm limite 1 e que
sen x pode ser substituído pelo infinitésimo equivalente x. Teremos então,
aplicando a regra à expressão simplificada,
limxÑ0
y “ 16
limxÑ0
x
logp1 ` 3xq “ 16
limxÑ0
13
1 ` 3x
“ 118
.
Até aqui supusemos a finito. Ora, suponhamos que se tenha
limxÑ8
fpxq “ limxÑ8
ϕpxq “ 0
e que, em certo entorno do infinito, ϕ 1pxq conserve um sinal constante. Se
pusermos
x “ 1t
,
as duas funções de t : f`
1t
˘
e ϕ`
1t
˘
terão limite zero no ponto t “ 0; se defi-
nirmos estas funções para t “ 0 dando-lhes o valor comum zero, obteremos
duas funções contínuas num entorno de zero, que satisfarão às condições do
teorema anterior, donde se deduz
limxÑ8
fpxqϕpxq “ lim
tÑ0
f`
1t
˘
ϕ`
1t
˘ “ limtÑ0
1t2 f
1`
1t
˘
1t2ϕ
1`
1t
˘ “ limtÑ0
f 1`
1t
˘
ϕ 1`
1t
˘ limxÑ8
f 1pxqϕ 1pxq .
Se o último limite existir, existirá também e será igual a ele o limite pro-
curado e nas aplicações não é necessário fazer a substituição.
§ 20. Regra de L’HOSPITAL. Continuação. A mesma regra dada no pará-
grafo anterior se estende ao caso do quociente de dois infinitos. Sejam ainda
fpxq e ϕpxq duas funções contínuas e deriváveis no intervalo a $% a` h, no
qual supomos que nem ϕpxq nem ϕ 1pxq se anule. Suponhamos ainda
(1) limxÑa`
fpxq “ 8, limxÑa`
ϕpxq “ 8, e limxÑa`
f 1pxqϕ 1pxq “ A.

58 VI. DERIVADAS
Dado então o número ε ą 0 arbitrário, existirá um ponto x0 entre a e
a` h, tal que se tenha, para a ă x ă x0
(2)
ˇ
ˇ
ˇ
ˇ
f 1pxqϕ 1pxq ´A
ˇ
ˇ
ˇ
ˇ
ă ε
2;
ora, do teorema de CAUCHY se deduz
(3) fpxq ´ fpx0q “ rϕpxq ´ϕpx0qs f1pxqϕ 1pxq px ă x ă x0q
donde, desenvolvendo e dividindo por ϕpxq,
(4)fpxqϕpxq ´ f 1pxq
ϕ 1pxq “ fpx0qϕpxq ´ ϕpx0q
ϕpxqf 1pxqϕ 1pxq “ gpxq.
Mas notando que a fração f 1pxqϕ 1pxq é limitada em valor absoluto,
como mostra a desigualdade (2), vê-se facilmente que fazendo x tender a
a pela direita, a função gpxq tende a zero, logo, existe um número x1 com-
preendido entre a e x0 tal que no intervalo a ´ x1 se tenha |gpxq| ă ε2.
Deduz-se então, para todo esse intervalo, somando membro a membro de
(2) e (4),ˇ
ˇ
ˇ
ˇ
fpxqϕpxq ´A
ˇ
ˇ
ˇ
ˇ
“ˇ
ˇ
ˇ
ˇ
f 1pxqϕ 1pxq ´A` gpxq
ˇ
ˇ
ˇ
ˇ
ďˇ
ˇ
ˇ
ˇ
f 1pxqϕ 1pxq ´A
ˇ
ˇ
ˇ
ˇ
` |gpxq| ă ε
2` ε
2“ ε
donde, finalmente,
limxÑa`
fpxqϕpxq “ A “ lim
xÑa`
f 1pxqϕ 1pxq .
O mesmo raciocínio se pode fazer para o limite à esquerda.
NOTA. É fácil ver que sempre que uma função fpxq tem limite infinito
num ponto a finito, a sua derivada, se existe, ou não tem limite ou é também
infinita para x Ñ a. Basta, para prová-lo, demonstrar que essa derivada
não pode ser limitada em valor absoluto em nenhum entorno de a; se por
exemplo, em um entorno de a tivéssemos |f 1pxq| ă K, sendo K independente
de x, fixado x0 em α, teríamos para todo ponto x compreendido entre x0 e
a,
fpxq ´ fpx0q “ px´ x0qf 1px0 ` θpx´ x0qq p0 ă θ ă 1q,donde
|fpxq| ă |fpx0q| ` |x0 ´ a|.K,
em contradição com a hipótese
limxÑa
fpxq “ 8.

VI. DERIVADAS 59
Por esta observação pode parecer que a regra precedente não tem utili-
dade prática; mas as expressões obtidas pelas derivações indicadas podem ser
mais simples para o cálculo do limite. Tomemos como exemplo, a expressão
y “ log senαxlog senβx
em que α e β são positivos. Os dois termos da fração são infinitos para
x Ñ 0`. Aplicando a regra, obtemos
limxÑ0`
y “ limxÑ0`
α cosαxsenαxβ cosβxsenβx
“ limxÑ0`
α
β¨ cosαx
cosβx¨ senβx
senαx.
No último membro o segundo fator tem limite 1; para calcular o limite
do último fator, substituimos os dois termos pelos infinitésimos equivalentes
βx e αx. Obtemos finalmente,
limxÑ0`
y “ α
β¨ βα
“ 1.
O caso em que as duas funções fpxq e ϕpxq são infinitas para x Ñ 8 se
estuda da mesma maneira que o dos infinitésimos, estudados atrás.
§ 21. Aplicações da regra de L’HOSPITAL. Até aqui estudamos o quoci-
ente de dois infinitésimos ou de dois infinitos, ou, como se diz comumente,
as expressões que se apresentam sob as formas 00 ou 88. Outros limites
que se reduzem facilmente a estes, são os das expressões que se apresentam
sob uma das formas
8 ´ 8, 0.8, 18, 80, 00.
As três últimas formas se reduzem à segunda se calcularmos o limite do
logaritmo da expressão dada. O limite do produto u.v em que
limxÑa
u “ 0 e limxÑa
v “ 8
pode ser calculado transformando o produto num quociente
u.v “ u
1v
“ v
1u
e caímos assim numa das formas já estudadas. Em geral, quando no produto
um dos fatores é uma função transcendente com derivada algébrica, é conve-
niente conservar esse fator no numerador para aplicar a regra de L’HOSPITAL
correspondente. Enfim, a diferença de dois infinitos em geral se transforma
facilmente no quociente de dois infinitésimos. Vamos dar um exemplo de
cada um desses últimos casos:

60 VI. DERIVADAS
1.
limxÑ0
ˆ
1x
´ cot x
˙
“ limxÑ0
tg x´ xx tg x
(quociente de dois infinitésimos).
Substituamos no denominador tg x pelo infinitésimo equivalente x. O
limite proposto é igual a
limxÑ0
1cos2 x
´ 1
2x“ lim
xÑ0
1 ´ cos2 x
2x“ lim
xÑ0
sen2 x
2x“ 0.
2.
limxÑ0
p1 ´ exq. log tg x “ limxÑ0
log tg x1
1´ex
“ limxÑ0
1sen x cos x
ex
p1 ´ exq2
e abandonando os fatores cos x e ex que têm limite 1, obtemos
limxÑ0
p1 ´ exq2
sen x“ lim
xÑ0
´2exp1 ´ exqcos x
“ 0.
3. y “ pcos xq3
1´ex2 . Limite para x Ñ 0 (forma 18).
logy “ 3 log cos x
1 ´ ex2
limxÑ0
logy “ limxÑ0
´3sen xcos x
´2xex2 “ limxÑ0
32
¨ tgxx
1
ex2 “ 3
2donde
limxÑ0
y “?e3.
4. y “ pcot xqe´ 1x . Limite para x Ñ 0` (forma 80).
logy “ log cot x
e1x
(quociente de dois infinitos)
limxÑ0
logy “ limxÑ0
´1sen2 x cot x
´ 1x2 e
1x
“ limxÑ0
x2
sen2 x
1
e1x cot x
“ 0,
pois na última expressão o primeiro fator tem limite 1 e o segundo tem limite
0. Segue-se daqui,
limxÑ0
y “ 1.
5. y “ p1 ` cos xqsenx. Limite para x Ñ π (forma 00).
logy “ sen x logp1 ` cos xq “ logp1 ` cos xq1
sen x

VI. DERIVADAS 61
limxÑπ
logy “ limxÑπ
´ sen x1 ` cos x
´ cos xsen2 x
“ limxÑπ
´ sen3 x
1 ` cos x“ lim
xÑπ
3 sen2 x cos xsen x
“ 0
donde, finalmente,
limxÑπ
y “ 1.
§ 22. Raízes ou zeros múltiplos. É conhecida na álgebra a noção de raiz
múltipla de um polinômio: diz-se que um número a é raiz rpla de um po-
linômio fpxq ou da equação fpxq “ 0, quando esse polinômio é divisível por
px´ aqr, sem ser divisível por px´ aqr`1. Este fato se traduz pela identidade
fpxq “ px´ aqrgpxq,
sendo gpxq um polinômio tal que gpaq ‰ 0. Da continuidade deste polinô-
mio, se deduz
limxÑa
fpxqpx´ aqr “ lim
xÑagpxq “ gpaq ‰ 0
isto é, a função fpxq é um infinitésimo de ordem r para x Ñ a. Sob esta
forma, é possível generalizar o conceito de raiz múltipla de uma função qual-
quer: diz-se que um ponto a é raiz rpla ou de multiplicidade r de uma função
fpxq, ou da equação fpxq “ 0, quando fpxq é um infinitésimo de ordem r
para x Ñ a. Nesta definição, o número r pode ser um número real positivo
qualquer; mas em geral o conceito só se aplica quando r é um número inteiro
positivo. A este caso nos limitaremos em todo este capítulo, pois só a ele se
aplica o seguinte
TEOREMA FUNDAMENTAL. A multiplicidade de uma raiz a de uma equa-
ção fpxq “ 0, é igual à ordem da primeira derivada que não se anula nesse
ponto, desde que essa derivada exista em a e que as anteriores, assim como
a função fpxq, sejam contínuas num entorno de a.
Com efeito, suponhamos satisfeitas, além das condições de existência e
continuidade das derivadas, as igualdades
fpaq “ f 1paq “ f2paq “ ¨ ¨ ¨ “ fpn´1qpaq “ 0 e fpnqpaq ‰ 0,
e comparemos o infinitésimo fpxq com gpxq “ px´aqn, que evidentemente sa-
tisfaz às mesmas condições. Aplicando repetidamente a regra de L’HOSPITAL,
temos
limxÑa
fpxqpx´ aqn “ lim
xÑa
f 1pxqnpx´ aqn´1 “ ¨ ¨ ¨ “ lim
xÑa
fpn´1qpxqn!px´ aq .

62 VI. DERIVADAS
Ora, o último limite pode-se escrever sob a forma
1n!
limxÑa
fpn´1qpxq ´ fpn´1qpaqx´ a “ 1
n!fpnqpaq ‰ 0
o que demonstra a proposição.
§ 23. Máximos e mínimos. Já vimos no lema do § 17 que sempre que
uma função tem um máximo ou mínimo relativo num ponto x0 que seja in-
terno a um intervalo em que ela é definida, a sua derivada, se existe, será
forçosamente nula neste ponto. Temos assim uma condição necessária para
a existência de um extremo; mas esta condição não é suficiente e não dá ne-
nhum esclarecimento sobre se o extremo porventura existente é um máximo
ou um mínimo.
No entanto, se a função tem derivadas sucessivas, existe um critério se-
guro para esclarecer a questão.
Seja fpxq uma função derivável no intervalo a $% b e seja a uma raiz da
equação
f 1pxq “ 0
interna a esse intervalo. Suponhamos ainda que fpxq tenha derivadas até à
ordem n nesse intervalo e que fpnqpxq seja a primeira dessas derivadas que
não se anula no ponto a. Nestas condições, temos:
1. Se n é par e fpnqpaq ă 0, fpaq é um máximo relativo.
2. Se n é par e fpnqpaq ą 0, fpaq é um mínimo relativo.
3. Se n é ímpar, não existe extremo no ponto a.
Com efeito, a função Fpxq “ fpxq ´ fpaq e suas n´ 1 primeiras derivadas,
as quais coincidem com as de fpxq, se anulam no ponto a, e pelo raciocínio
feito no parágrafo precedente, temos
limxÑa
Fpxqpx´ aqn “ lim
xÑa
fpxq ´ fpaqpx´ aqn “ 1
n!fpnqpaq ‰ 0.
Podemos, pois, determinar um entorno completo de σ de a, dentro do
qual a função Fpxqpx ´ aqn, definida para x ‰ a, tenha o mesmo sinal que
o seu limite, isto é, o mesmo sinal que fpnqpaq. Se n for par, o denominador
px´ aqn é sempre positivo e portanto Fpxq terá em todo o entorno σ, exceto
para x “ a, esse mesmo sinal; temos portanto, nesse entorno, para fpnqpaq ă0, fpxq ď fpaq, e para fpnqpaq ą 0, fpxq ě fpaq, o que prova as proposições
1. e 2. Se n for ímpar, o sinal de px ´ aqn mudará com o de x ´ a, logo o
mesmo acontece com o de fpxq ´ fpaq, o que exclui a existência de máximo
ou mínimo.
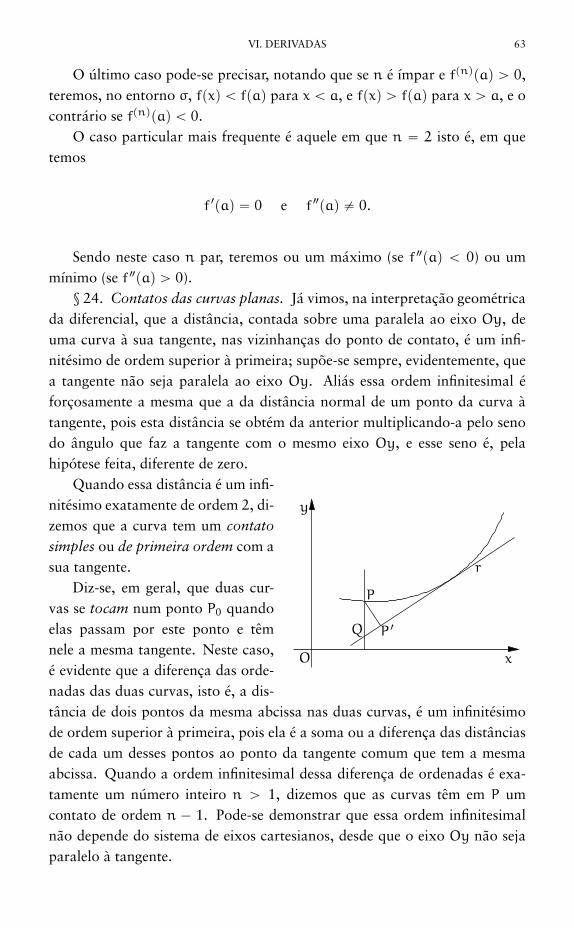
VI. DERIVADAS 63
O último caso pode-se precisar, notando que se n é ímpar e fpnqpaq ą 0,
teremos, no entorno σ, fpxq ă fpaq para x ă a, e fpxq ą fpaq para x ą a, e o
contrário se fpnqpaq ă 0.
O caso particular mais frequente é aquele em que n “ 2 isto é, em que
temos
f 1paq “ 0 e f2paq ‰ 0.
Sendo neste caso n par, teremos ou um máximo (se f2paq ă 0) ou um
mínimo (se f2paq ą 0).
§ 24. Contatos das curvas planas. Já vimos, na interpretação geométrica
da diferencial, que a distância, contada sobre uma paralela ao eixo Oy, de
uma curva à sua tangente, nas vizinhanças do ponto de contato, é um infi-
nitésimo de ordem superior à primeira; supõe-se sempre, evidentemente, que
a tangente não seja paralela ao eixo Oy. Aliás essa ordem infinitesimal é
forçosamente a mesma que a da distância normal de um ponto da curva à
tangente, pois esta distância se obtém da anterior multiplicando-a pelo seno
do ângulo que faz a tangente com o mesmo eixo Oy, e esse seno é, pela
hipótese feita, diferente de zero.
O x
y
P
P 1Q
r
Quando essa distância é um infi-
nitésimo exatamente de ordem 2, di-
zemos que a curva tem um contato
simples ou de primeira ordem com a
sua tangente.
Diz-se, em geral, que duas cur-
vas se tocam num ponto P0 quando
elas passam por este ponto e têm
nele a mesma tangente. Neste caso,
é evidente que a diferença das orde-
nadas das duas curvas, isto é, a dis-
tância de dois pontos da mesma abcissa nas duas curvas, é um infinitésimo
de ordem superior à primeira, pois ela é a soma ou a diferença das distâncias
de cada um desses pontos ao ponto da tangente comum que tem a mesma
abcissa. Quando a ordem infinitesimal dessa diferença de ordenadas é exa-
tamente um número inteiro n ą 1, dizemos que as curvas têm em P um
contato de ordem n ´ 1. Pode-se demonstrar que essa ordem infinitesimal
não depende do sistema de eixos cartesianos, desde que o eixo Oy não seja
paralelo à tangente.

64 VI. DERIVADAS
É fácil achar a condição necessária e suficiente para que haja contato de
ordem n´ 1, quando as curvas são representadas por equações
y “ fpxq e y “ ϕpxq
em que f e ϕ são funções contínuas e com derivadas contínuas até a ordem
n, num entorno da abcissa x0 de P0. Com efeito, x0 devendo ser raiz npla
da função fpxq ´ ϕpxq, esta função e suas n ´ 1 primeiras derivadas devem
se anular no ponto x0, e a derivada enésima deve ser diferente de zero. Em
outras palavras, devem ser satisfeitas as seguintes condições:
fpx0q “ ϕpx0qfppqpx0q “ ϕppqpx0q pp “ 1, 2, . . . , n´ 1qfpnqpx0q ‰ ϕpnqpx0q.
(1)
Examinemos por exemplo, o contato entre uma curva y “ fpxq e uma
reta y “ mx ` h, num ponto de abcissa x0. Para que haja um contato de
primeira ordem ao menos, é preciso que se tenha
fpx0q “ mx0 ` hf 1px0q “ m
donde
h “ fpx0q ´ x0f1px0q;
portanto a equação da reta é
y “ f 1px0q.x` fpx0q ´ x0.f 1px0q
ou
y´ y0 “ f 1px0qpx´ x0qe achamos a equação da tangente, como era fácil prever. Para que o con-
tato com a reta seja de segunda ordem, é preciso que se tenha f2px0q “ 0 e
f3px0q ‰ 0. Os pontos que satisfazem a esta condição chamam-se pontos de
inflexão.
Voltemos ao caso geral: suponhamos que as curvas y “ fpxq e y “ ϕpxqtenham um contato de ordem n´ 1 no ponto x0, y0. O ponto x0 será então
uma raiz da função fpxq ´ ϕpxq e da sua primeira derivada f 1pxq ´ ϕ 1pxq.Nesse ponto estão satisfeitas as condições (1) donde se deduz, pelo parágrafo
precedente, que se n é par o valor zero é ou um máximo ou um mínimo dessa
função, ao passo que se n é ímpar, essa função muda de sinal no ponto x0.
Segue-se daqui, que nos pontos em que as duas curvas têm contato de ordem
par pn´1q elas se atravessam, e naqueles em que o contato é de ordem ímpar,

VI. DERIVADAS 65
não. Por exemplo em todo ponto de inflexão (contato de 2ª ordem) a curva
atravessa a tangente.
§ 25. Sentido de concavidade. O sinal da segunda derivada também tem
uma significação geométrica importante. Toda vez que em um ponto P de
uma curva C existe uma tangente que não atravessa esta curva, pode-se de-
terminar um círculo de centro P e raio suficientemente pequeno tal que todos
os pontos de C internos ao círculo estejam do mesmo lago da tangente; em
outras palavras, a curva está, nas vizinhanças de P, toda contida num mesmo
semi-plano em relação à tangente. Diz-se então que a curva volta à sua con-
cavidade para esse semi-plano, ou para qualquer ponto desse semi-plano, ou
para qualquer semi-reta orientada contida nesse semi-plano.
Suponhamos então a curva dada pela equação
y “ fpxq,
e tomemos um ponto px, yq em que a tangente não seja paralela a Oy. Ad-
mitindo a existência da primeira e da segunda derivadas de fpxq, vemos pelo
parágrafo anterior que se y2 for positiva, a diferença de ordenadas da curva
e da tangente passa pelo valor mínimo zero, isto é, nas vizinhanças desse
ponto a ordenada da curva é maior que a da tangente. A curva tem então a
sua concavidade voltada para o sentido positivo do eixo Oy. Terá a conca-
vidade voltada para o sentido negativo do mesmo eixo, se tivermos y2 ă 0.
Por exemplo, a parábola y “ ax2 `bx`c tem a sua concavidade sempre
voltada para cima ou para baixo, conforme seja a positivo ou negativo, pois
temos y2 “ 2a. A sinusoide y “ sen x tem sempre a concavidade voltada
para o pé da ordenada (y e y2 têm sinais contrários), ao passo que a curva
y “ tg x para a qual temos y2 “ 2y cos2 x, tem a concavidade voltada para
o prolongamento da ordenada.
§ 26. Círculo osculador. Uma das mais importantes aplicações da teoria
do contato é a noção de círculo osculador. Seja dada a curva
(1) y “ fpxq
em que o segundo membro é uma função contínua com derivadas contínuas
até à 2ª ordem, no ponto px, yq. Vamos determinar um círculo que tenha o
máximo contato possível com a curva (1). Para isso, notemos que a função
(2) y “ ϕpxq
que define o círculo de centro pa, bq e raio r é a função algébrica definida
pela equação
(3) px´ aq2 ` py´ bq2 “ r2;

66 VI. DERIVADAS
como temos três parâmetros a determinar, podemos impôr três condições,
que são igualdades das funções fpxq e ϕpxq e das duas primeiras derivadas.
Em vez de resolver a equação (3) e derivar, notemos que essa equação (3)
é satisfeita identicamente pela função (2), logo temos, derivando duas vezes
em relação a x,
x´ a` py´ bqϕ 1 “ 0(4)
1 `ϕ 12 ` py´ bqϕ2 “ 0.
Mas no ponto em questão podemos substituir ϕ 1 e ϕ2 por y 1 e y2, que
são as duas primeiras derivadas da função (1). Resolvendo as equações obti-
das, temos então
a “ x´ 1 ` y 12
y2y 1, b “ y` 1 ` y 12
y2, r “ p1 ´ y 12q 3
2
|y 1| .
O círculo assim obtido chama-se círculo osculador da curva dada. Vemos
que em geral, o círculo osculador de uma curva tem com esta um contato de
segunda ordem, e portanto atravessa a curva.
§ 27. Fórmulas de TAYLOR e de MACLAURIN. Mas a mais importante
aplicação da teoria dos contatos consiste na aproximação de funções por
meio de polinômios, que são as funções mais simples depois das constantes e
das funções lineares.
Este problema se enuncia mais precisamente como segue: Dada uma fun-
ção y “ fpxq definida num entorno de um ponto x0, procurar um polinômio
ϕpxq tal que a diferença fpxq ´ϕpxq seja a menor possível nas vizinhanças de
x0, de modo que, nos cálculos, se possa substituir fpxq pelo polinômio ϕpxq.Vamos demonstrar que se fpxq tem derivadas até à ordem n no entorno dado
de x0 é possível determinar um polinômio ϕpxq de grau n´ 1 tal que a dife-
rença fpxq ´ ϕpxq “ Rpxq seja um infinitésimo de ordem ě n para x Ñ x0;
ao mesmo tempo ficará demonstrada, como veremos, a unicidade do polinô-
mio ϕpxq. Este polinômio, desenvolvido segundo as potências crescentes de
x´ x0, pode-se escrever
ϕpxq “ a0 ` a1px´ x0q ` a2px´ x0q2 ` ¨ ¨ ¨ ` an´1px´ x0qn´1,
e a curva de equação
y “ ϕpxqchama-se em geral parábola de ordem n´ 1.
O problema consiste pois em determinar uma parábola de ordem n ´ 1
que tenha com a curva
y “ fpxq

VI. DERIVADAS 67
um contato de ordem ě n ´ 1 no ponto x0, y0 “ fpx0q. Pelo parágrafo
anterior, os valores de fpxq e suas n ´ 1 primeiras derivadas devem ser os
mesmos, no ponto x0, que os de ϕpxq e suas n´ 1 primeiras derivadas. Ora,
estas últimas calculam-se facilmente, pois temos
ϕ 1pxq “ a1 ` 2a2px´ x0q ´ 3a3px´ x0q2 ` . . .
ϕ2pxq “ 2a2 ` 3.2.a3px´ x0q ` . . .
. . . . . . . . . . . . . . .
ϕpn´1qpxq “ pn´ 1q!an´1.
E como em qualquer delas todos os termos a partir do segundo se anulam
para x “ x0, temos em geral
ϕppqpx0q “ p!ap pp “ 1, . . . ,n´ 1q.
Devemos ter, portanto,
a0 “ fpx0qa1 “ f 1px0q
2!a2 “ f2px0q. . . . . . . . . . . . . . .
pn´ 1q!an´1 “ fpn´1qpx0q,
o que determina, univocamente, os coeficientes ap, e portanto o polinômio
(1) ϕpxq “ fpx0q ` px´ x0qf 1px0q ` px´ x0q2
2!f2px0q ` . . .
¨ ¨ ¨ ` px´ x0qn´1
pn´ 1q! fpn´1qpx0q.
Podemos ainda calcular o erro cometido quando se substitui fpxq por
ϕpxq, isto é, a diferença
Rpxq “ fpxq ´ϕpxq.
Para isto, basta aplicar o teorema de CAUCHY, comparando Rpxq com a
função ψpxq “ px ´ x0qn; notando que estas duas funções se anulam, assim
como as suas n´ 1 primeiras derivadas, no ponto x0, teremos
Rpxqψpxq “ Rpxq ´ Rpx0q
ψpxq ´ψpx0q “ R 1px1qψ 1px1q “ R 1px1q ´ R 1px0q
ψ 1px1q ´ψ 1px0q “ R2px2qψ2px2q “ . . .
“ Rpn´1qpxn´1q ´ Rpn´1qpx0qψpn´1qpxn´1q ´ψpn´1qpx0q “ Rpnqpxnq
ψpnqpxnq ,
(2)

68 VI. DERIVADAS
sendo x1 um ponto conveniente compreendido entre x e x0, x2 um compre-
endido entre x1 e x0, etc. O ponto xn, estando também compreendido entre
x e x0, pode ser representado por x0 ` θpx ´ x0q, com 0 ă θ ă 1. Como
ϕpnqpxq “ 0, temos Rpnqpxq “ fpnqpxq; além disso, ψpnqpxq “ n!, e portanto,
(3) Rpxq “ ψpxqfpnqpxnqn!
“ px´ x0qnn!
fpnqpx0 ` θpx´ x0qq p0 ă θ ă 1q.
Esta expressão do resto é chamada resto de LAGRANGE. Podemos tam-
bém admitir que a derivada fpnqpxq exista somente no ponto x0, notando
que se tem ψpn´1qpxq “ n!px ´ x0q, e que portanto, desprezando a última
igualdade em (2), temos
limxÑx0
Rpxqpx´ x0qn “ 1
n!limxÑx0
fpn´1qpxn´1q ´ fpn´1qpx0qxn´1 ´ x0
“ fpnqpx0qn!
donde
(4) Rpxq “ px´ x0qnn!
rfpnqpx0q ` εs
sendo ε uma quantidade infinitésima para x Ñ x0. Esta última expressão do
resto chama-se resto de PEANO.
Substituindo a expressão do resto na igualdade fpxq “ ϕpxq ` Rpxq e
pondo x´ x0 “ h, e substituindo ainda x0 por x, temos
(5) fpx` hq “ fpxq ` f 1pxq ` h
2f2pxq ` ¨ ¨ ¨ ` hn´1
pn´ 1q!fpn´1qpxq`
` hn
n!fpnqpx` θhq p0 ă θ ă 1q
que é a fórmula de TAYLOR, com o resto de LAGRANGE. Para o ponto
x0 “ 0, donde x´ x0 “ x, teremos
(6) fpxq “ fp0q ` xf 1p0q ` x2
2!f2p0q ` ¨ ¨ ¨ ` xn´1
pn´ 1q!fpn´1qp0q`
` xn
n!fpnqpθxq p0 ă θ ă 1q;
esta última fórmula é apenas um caso particular da precedente, mas pela
sua importância é conhecida com o nome de seu descobridor, isto é, como
fórmula de MACLAURIN.
§ 28. Outras fórmulas do resto. Vamos achar uma forma mais geral
para o resto da fórmula de TAYLOR; para isto, fizemos b, e tomemos uma
função gpxq, crescente ou decrescente e derivável em todo o intervalo a $% b,

VI. DERIVADAS 69
sendo além disto gpbq “ 0 (e portanto gpxq ‰ 0, para a ď x ă b). Definamos
o número A pela condição
(1) fpbq ´ fpaq ´ pb´ aqf 1paq ´ ¨ ¨ ¨ ´ pb´ aqn´1
pn´ 1q! fpn´1qpaq “ Agpaq
e consideremos a função
Fpxq “ fpbq ´ fpxq ´ pb´ xqf 1pxq ´ pb´ xq2
2!f2pxq ´ . . .
¨ ¨ ¨ ´ pb´ xqn´1
pn´ 1q! fpn´1qpxq ´Agpxq.
Como esta função se anula para x “ a e para x “ b, a sua derivada
deve anular-se em um ponto compreendido entre esses, o qual é da forma
ξ “ a ` θpb ´ aq. Mas na derivação de Fpxq é fácil ver que desaparecem
vários termos, ficando somente
pb´ ξqn´1
pn´ 1q! fpnqpξq ´Ag 1pξq “ 0.
Daqui se tira o valor de A, e portanto de Agpaq, que é o resto da fórmula
de TAYLOR, que se obtém resolvendo (1) em relação a fpbq:
Agpaq “ ´pb´ aqn´1p1 ´ θqn´1gpaqpn´ 1q!g 1pa` θpb´ aqq f
pnqpa` θpb´ aqq;
esta expressão é conhecida como resto de SCHLOMILCH.
Se tomarmos gpxq “ pb ´ xqn, que evidentemente satisfaz às condições
impostas para esta função, temos
g 1pxq “ ´npb´ xqn´1,
e portanto,
g 1pa` θpb´ aqq “ ´npb´ aqn´1p1 ´ θqn´1,
donde
Agpaq “ pb´ aqnn!
fpnqpa` θpb´ aqq
que é o resto de LAGRANGE.
Para gpxq “ b´ x, obtemos o chamado resto de CAUCHY:
Agpaq “ pb´ aqnp1 ´ θqn´1
pn´ 1q! fpnqpa` θpb´ aqq.

70 VI. DERIVADAS
Exercícios e complementos
1. Achar a derivada de cada uma das funções:
a) log sen x3
b) arctgx´ 2
3 ´ ecosx
c) 3a
senplog x´ 3arctgxqd) ee
x
e) psen xqarccosx
f) arctg log tg x
2. Achar a na derivada de
a) p?x
b) sennx
c) xn ` x´n
d) ax
e) senn x
3. Aplicar as regras de L’HOSPITAL ao cálculo dos seguintes limites:
a)
limxÑ0
p1 ´ sen xqcotx
b)
limxÑ0
pcot xqlog cosx
c)
limxÑ0
pcos x2qe1x4´1
d)
limxÑ0
„
1xp1 ` xq ´ logp1 ` xq
x2
4. Achar a ordem infinitesimal das funções:
a) log cos x` tg sen x
b) arctg x´ sen x
c) 1 ´ sen2 x
x2
d) 1 ´ cos x3
e) 2x´ sen x´ tg x
f) x4 ´ sen2 x2
5. Construir os gráficos das seguintes funções, determinando os pontos
de encontro com os eixos, os máximos e mínimos, os pontos em que a função
é infinita e os pontos de inflexão:
a) y “ x´ 3x2 ´ 4
b) y “ x2 cos x

EXERCÍCIOS E COMPLEMENTOS 71
c) y “ esenx
d) y “ cos log x
e) y “ x
3´ arctg x
f) y “ 12
pex ´ e´xq
NOTA. Em alguns desses exemplos, a determinação de um ponto de-
pende da resolução de equações transcendentes ou algébricas de grau ą 2,
que devem ser resolvidas por aproximação, ou mesmo por meio de gráficos
auxiliares; assim, na determinação dos máximos ou mínimos em 5b), aparece
a equação
2x cos x´ x2 sen x “ 0,
ou, pondo de parte a solução x “ 0, 2 cos x “ x sen x, cujas raízes são abcis-
sas dos pontos de encontro da reta y “ x2 com a curva y “ cot x.
6. Calcular o raio de curvatura da parábola y2 “ 2px, em um ponto
qualquer da curva.
7. Demonstrar, por considerações geométricas, que se uma curva tem um
eixo de simetria, o círculo osculador nos pontos em que esse eixo corta a
curva, tem com esta um contato de ordem ímpar. Precisar as condições de
validade deste teorema.
8. Escrever a fórmula de MACLAURIN até o no termo para as funções
a) y “ sen x
b) y “ cos x
c) y “ ex
d) y “ arctg x
e) y “ logp1 ` xqf) y “ p1 ` xqp9. Escrever a fórmula de MACLAURIN até o 3º ou 4º termo para as fun-
ções:
a) y “ sen2 x
b) y “ tg x
c) y “ arccos x
d) y “ log cos x

Índice Remissivo
C
círculo osculador, 66
contato
de ordem n, 63
de primeira ordem, 63
simples, 63
Critério da integral de CAUCHY, 10
critério da raiz, 7
critério da razão, 7
critério de ABEL, 15
Critério de convergência de CAUCHY, 2,
3
critério de convergência de DIRICHLET,
15
Critério de KUMMER, 9
Critério de RAABE, 9
D
derivada, 29
à direita, 33
à esquerda, 33
derivada de ordem n, 30
logarítmica, 36
segunda, 30
desigualdade de ABEL, 15
diferenciação, 50
diferencial, 49
segunda, 51
F
fórmula de TAYLOR, 68
fórmula de LEIBNIZ, 44
fórmula de MACLAURIN, 68
fórmula dos acréscimos finitos, 54
função
analítica, 45
derivável, 29
diferenciável, 50
infinitésima, 45
mínimo relativo de uma, 52
máximo relativo de uma, 52
ponto de mínimo para uma, 52
ponto de máximo para uma, 52
I
infinitésimo, 45
principal, 47
infinito, 47
infinito principal, 48
L
lei do movimento, 32
N
números derivados, 34
O
operação linear, 34
ordem de infinito, 47
ordem infinitesimal, 45
negativa, 48
P
parábola
de ordem n, 66
ponto
de inflexão, 64
ponto anguloso, 34
postulado de ZERMELO, 26
produto de séries, 17
produto infinito, 22
73
74 ÍNDICE REMISSIVO
absolutamente convergente, 23
convergente, 22
R
raiz múltipla
de um polinômio, 61
de uma função, 61
Regra de L’HOSPITAL, 55
resto
de CAUCHY, 69
de LAGRANGE, 68, 69
de PEANO, 68
de SCHLOMILCH, 69
S
série, 1
absolutamente convergente, 11
alternada, 10
dupla, 19
absolutamente convergente, 19
série principal de uma, 20
soma por colunas, 20
soma por linhas, 20
produto de duas, 17
simplesmente convergente, 11
soma da, 2
somas reduzidas de uma, 1
termos de uma, 1
série geométrica, 6
série harmônica, 6
alternada, 11
sucessão, 1
extraída de outra, 25
infinitésima, 1
limite mínimo de uma, 4
limite máximo de uma, 4
oscilação de uma, 4
ponto limite de uma, 2
T
Teorema de ABEL, 15
Teorema de CAUCHY, 17, 53
Teorema de CAVALIERI, 54
Teorema de CESARO, 25
Teorema de DIRICHLET, 11
Teorema de MERTENS, 18
Teorema de PRINGSHEIM, 21
Teorema de RIEMANN-DINI, 12
Teorema do Valor Médio, 54
V
velocidade, 32
velocidade média, 32