curso plc general
TRANSCRIPT
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 1/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 0
CONTROLADORES LOGICOS PROGRAMABLES ( PLC )

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 2/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 1
! "
! "
#$& ' (
)
$ % * + * &#$ * *
- . $ -$ , .
/ $ - .+ #$ $
#$
0 $ 01
• $ 0 • #$ 0 • % & $ 0 #
0 #$ )
• '
+
• 0 & #
* 0 ' 3 ( • ( $ *
$ & #$
! * & *$ + 0 6 '
*
! 0 $ 0& #$

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 3/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 2
! 2 $0 * #
* *
7 * ,2
2$ 9: $
& 2 '; (* #0 + < + ) 0
$ & & # 2& ' ;/( 0 +
) $
= , 1+
) ,$ 0 +
! ' 9>% 9?(* $ +
! ,0 2 & +$ 2 0
+ *' & (
9@ 9 !& , & $
A A, 2 5 # & &
$ 1 6 %
=A ) A B
5 & + C >*$ , 0 & 1
! , ,

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 4/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 3
* * &A 2 A $
0 * 2 * *
#$ * $ 0
* & && C >
,* D $ 0
! 30
& $ *& # # &
* #$ EA , 2 &
" *, *
6 C > 0 A$ * 2 * &
45BF ** *
$
! D * $ ,, , $
D 2' & (* $ $
5 $2 G E
! , E , $2 3 ', > >>>(*
3 * 6 H F

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 5/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 4
) '*( * ( ! *( ! ( "( +(
6$
SEÑALES DESDE EL CAMPO
ENTRADAS
BUS DE DATOS
C.P.U. FUENTE DEALIMENTACION
BUS DE DATOS
SALIDAS
SEÑALES HACIA EL CAMPO
7 1 *6" #
# , * # )
6" ' 6 " (6
* 1

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 6/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 5
' ($ 6"
5 *
%%%%% 0% )% +
* , $' 2 1 ::>I 5( !
$ 6" $ ,A A
6" BAJ A* 0 $ 6" , J #
'J K ( *6" $ , J , > 'J K >(
" 0 1 A<:A ! 0 $
# ! # 0$ 6" <:
5, * 6"$ J K * # #* #
1 # $ 2 $ 2 $
! 6"* + 6" ' +
( $ $ #
! ,>* +
3
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 7/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 6
, ' %
B1
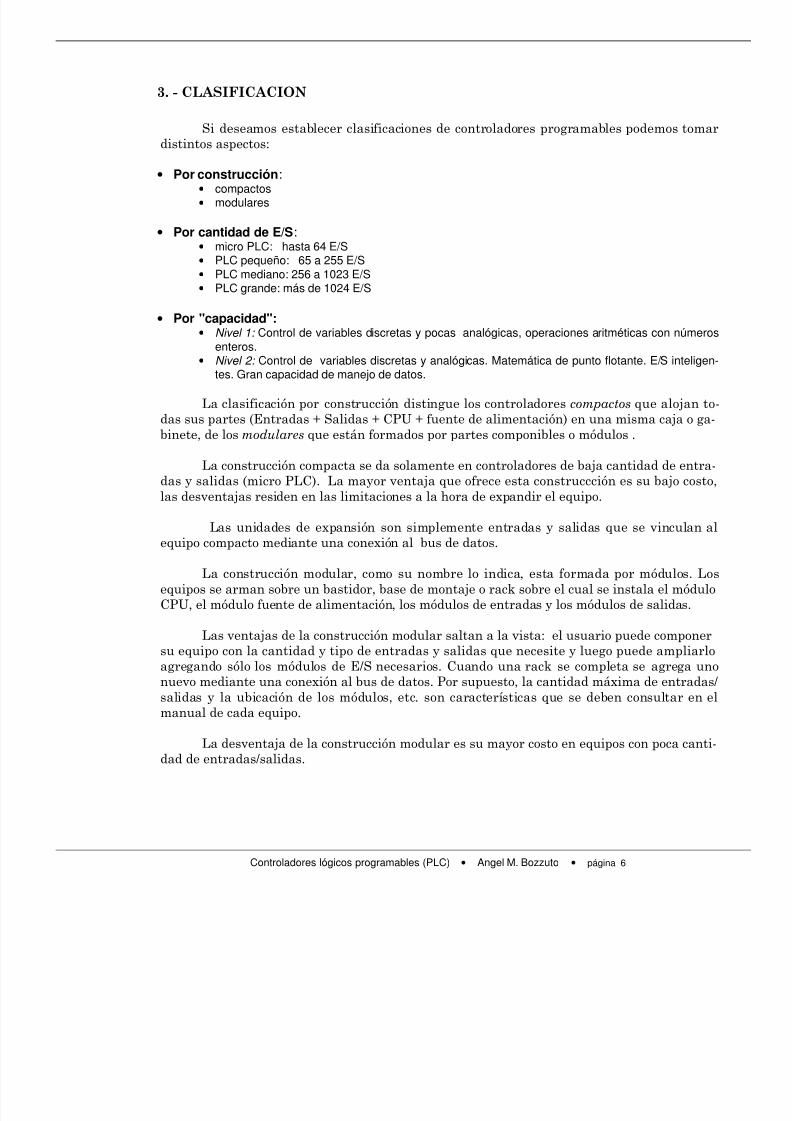
• Por construcción :• compactos• modulares
• Por cantidad de E/S :• micro PLC: hasta 64 E/S• PLC pequeño: 65 a 255 E/S• PLC mediano: 256 a 1023 E/S• PLC grande: más de 1024 E/S
• Por "capacidad":• Nivel 1: Control de variables discretas y pocas analógicas, operaciones aritméticas con núme
enteros.• Nivel 2: Control de variables discretas y analógicas. Matemática de punto flotante. E/S inteli
tes. Gran capacidad de manejo de datos.
$ 2'! H B H 6" H (
* $ #
2' 6 ( 2 $
2 , ) $
) $$ )
* *$ * 2 L6"* *
2 1$ $
!3B L) 6 * #)
* 0 $$
2 $3

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 8/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 7
* %6 * )$ 2 # M> 3 $
6 - L. ' (
*0 5 * 3
2 6 $ ,0 *
$
2 8 )$ :
2 A A2
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 9/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 8
- *( ! ' . ' ! '
'F 3= (5 $ 6
6"
N ,)
# 6 *+ +
)
" 0 $
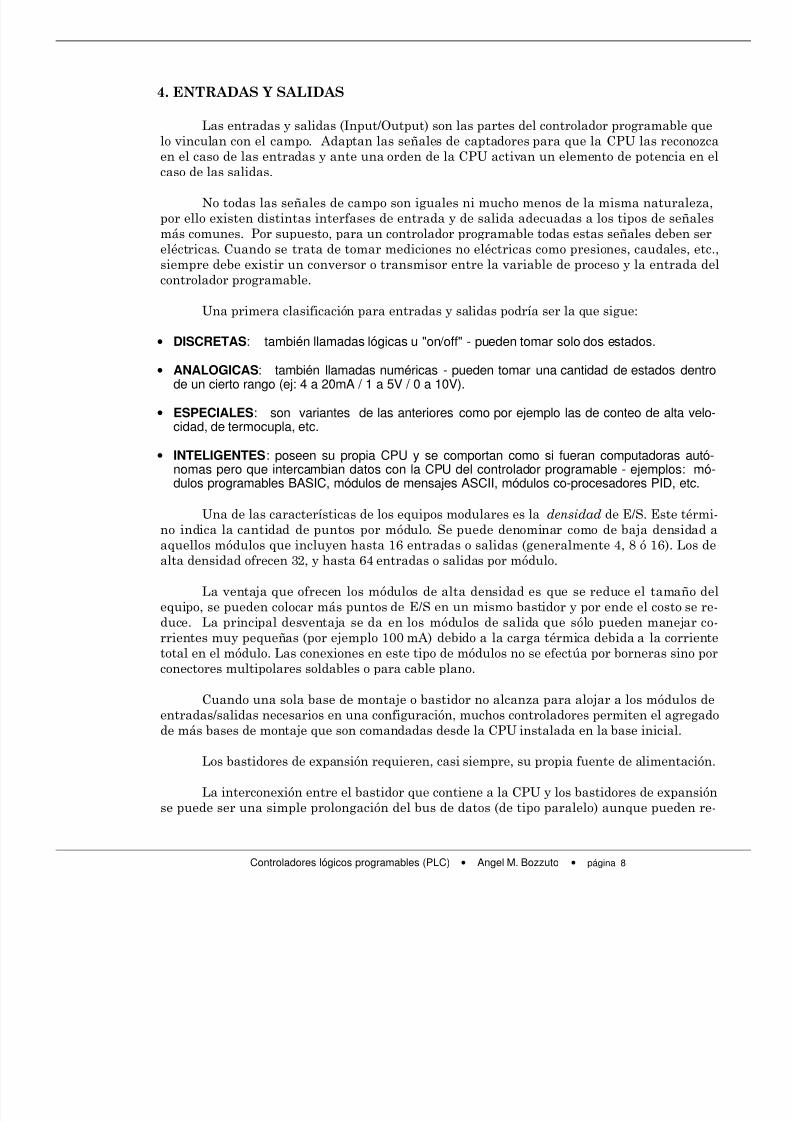
• DISCRETAS : también llamadas lógicas u "on/off" - pueden tomar solo dos estados.
• ANALOGICAS : también llamadas numéricas - pueden tomar una cantidad de estados dentde un cierto rango (ej: 4 a 20mA / 1 a 5V / 0 a 10V).
• ESPECIALES : son variantes de las anteriores como por ejemplo las de conteo de alta vecidad, de termocupla, etc.
• INTELIGENTES : poseen su propia CPU y se comportan como si fueran computadoras autnomas pero que intercambian datos con la CPU del controlador programable - ejemplos: dulos programables BASIC, módulos de mensajes ASCII, módulos co-procesadores PID, etc
" 0 $ !3B ! +
B$ $ , ' ?*
M:* , ?
2 $ $$ * # !3B
2 $$ ' 2 >> 5( +
) D
2 & 23 * ,
# 2 $ 6"
) $ * *
) $ 6"' (

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 10/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 9
$ ) ! ), : M '
6 (
= ) 2 )$ 3 * )
& ), # @ L *
0 ,
B 26" :>> 3
@> * $:>> @>
B ,& @> D ) '
!3B $ $6" 0 ,
6" , 3 D
6 6"' 2 1<?:( # * !3B
, 6" !3B ** $
- *( ! ' ! ' ( * '
' (* # 1 :?I 3 :?I 5 3 // 3 >I 5 3 ::>I 5
0# , > 6" !
1
• Rectificador : en el caso de las entradas de CA convierte la señal en contínua y en el caso dCC impide daños por inversión de polaridad.
• Acondicionador de señal : baja la tensión a un nivel lógico, elimina ruidos y detecta umbral on/off.
• Indicador de estado : diodo luminoso (LED) que se enciende cuando hay tensión en la entra
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 11/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 10
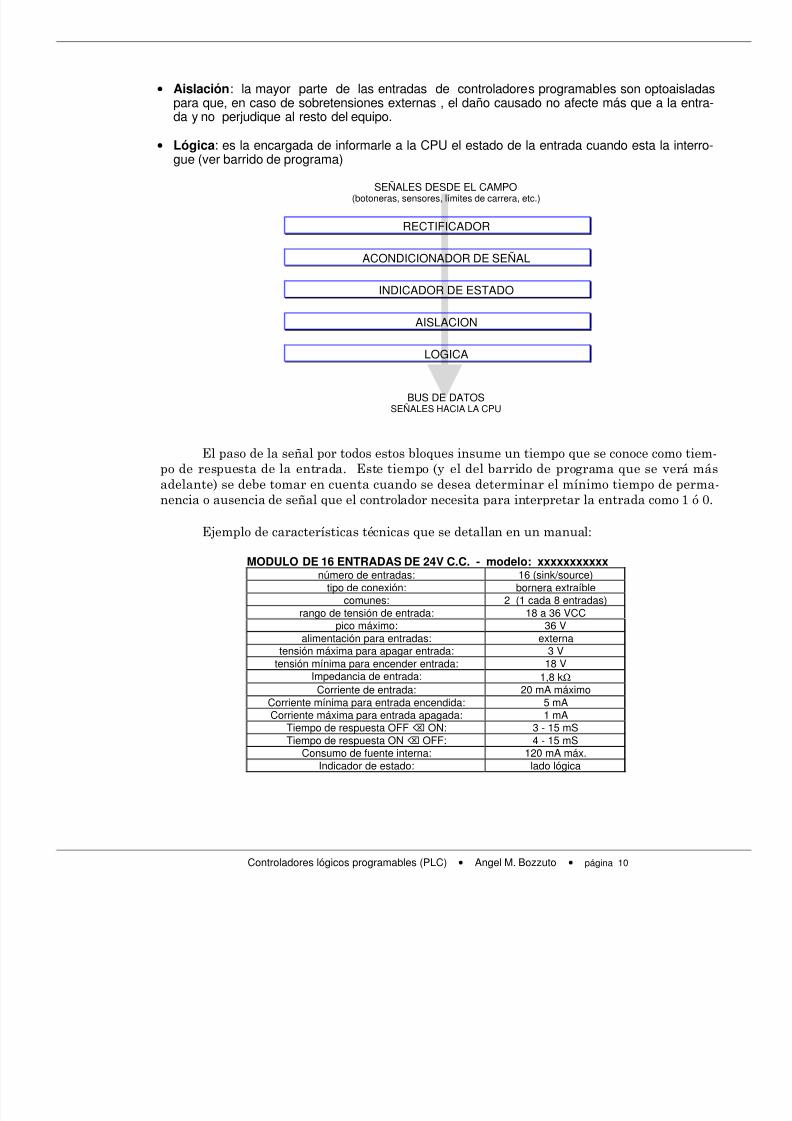
• Aislación : la mayor parte de las entradas de controladores programables son optoaisladpara que, en caso de sobretensiones externas , el daño causado no afecte más que a la entra-da y no perjudique al resto del equipo.
• Lógica : es la encargada de informarle a la CPU el estado de la entrada cuando esta la interrgue (ver barrido de programa)
SEÑALES DESDE EL CAMPO(botoneras, sensores, límites de carrera, etc.)
RECTIFICADOR
ACONDICIONADOR DE SEÑAL
INDICADOR DE ESTADO
AISLACION
LOGICA
BUS DE DATOSSEÑALES HACIA LA CPU
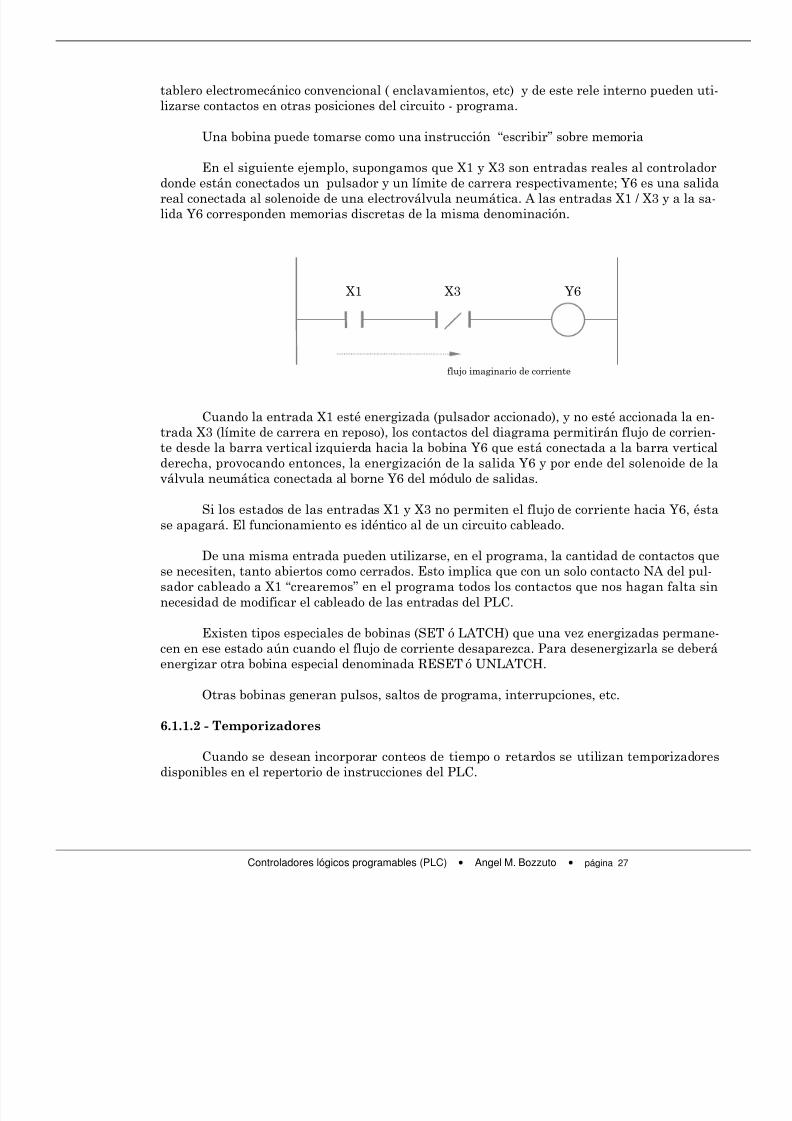
! $ $! '
( 0$
!2 0 + $ 1
MODULO DE 16 ENTRADAS DE 24V C.C. - modelo: xxxxxxxxxxxnúmero de entradas: 16 (sink/source)
tipo de conexión: bornera extraíblecomunes: 2 (1 cada 8 entradas)
rango de tensión de entrada: 18 a 36 VCCpico máximo: 36 V
alimentación para entradas: externatensión máxima para apagar entrada: 3 V
tensión mínima para encender entrada: 18 VImpedancia de entrada: 1,8 kΩ Corriente de entrada: 20 mA máximo
Corriente mínima para entrada encendida: 5 mACorriente máxima para entrada apagada: 1 mA
Tiempo de respuesta OFF ON: 3 - 15 mSTiempo de respuesta ON OFF: 4 - 15 mS
Consumo de fuente interna: 120 mA máx.Indicador de estado: lado lógica
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 12/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 11
- ) ' ! ' ! ' ( * '
#•••
+ & 585 !
2
$* + # #
! 0) ) "
? @ ") > $ 0
*
$ #$ , # #)
! #
" &+
! $ 0 #1
• Aislación: Entre la lógica de la CPU y la salida se utilizan optoaisladores para que un cocircuito o mala conexión al campo no dañe más que el elemento final. No se utilizan optoadores cuando se trata de salidas por relé ya que la bobina de éste es comandada por lCPU y sólo sus contactos se conectan al campo. De esta forma, una falla externa sólo dañaa los contactos o a un fusible de protección.
• Indicador de estado: Generalmente se coloca antes de la optoaislación un LED indicador estado.
• Circuito de conexión: Es el elemento final de la salida, el que maneja la carga conectada pel usuario. Existen tres tipos de elementos finales de conexión: transistores, triacs y relés.
• Protección: Puede consistir en un fusible en serie con los contactos de salida para protegerlde cortocircuitos en el campo o también puede incluir un varistor o un circuito RC para elimpicos generados por la naturaleza de la carga.
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 13/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 12
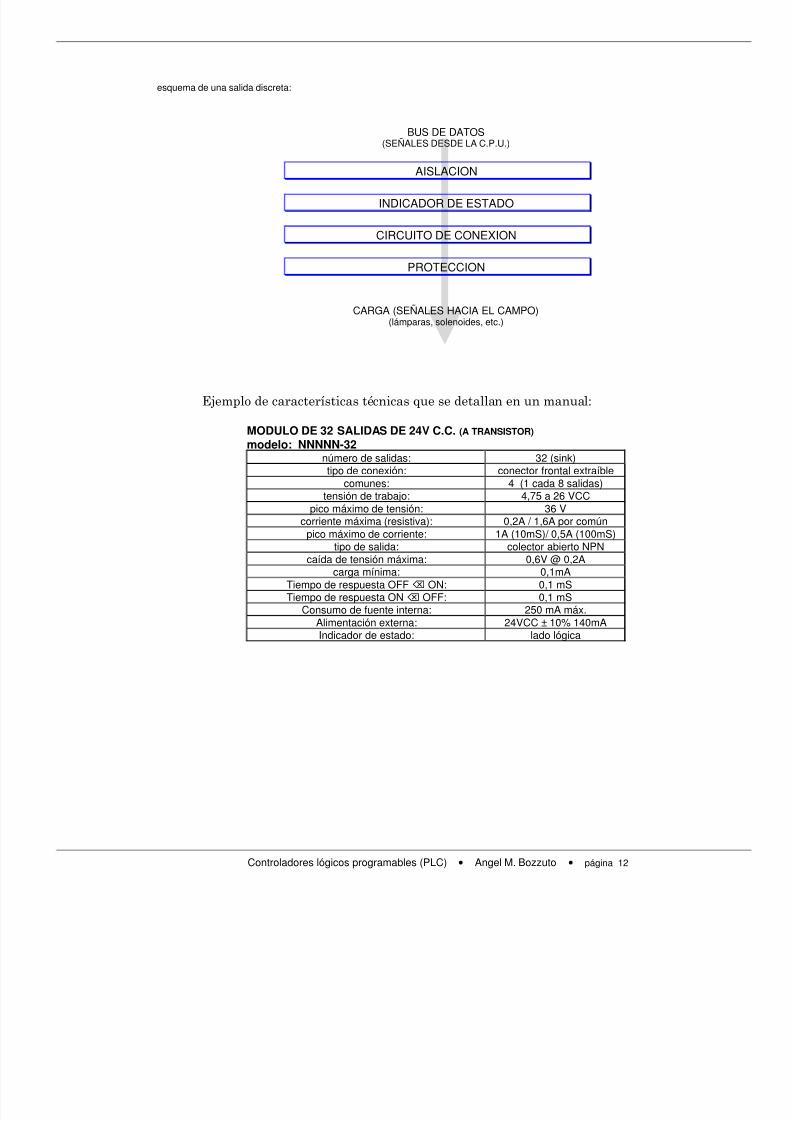
esquema de una salida discreta:
BUS DE DATOS(SEÑALES DESDE LA C.P.U.)
AISLACIONINDICADOR DE ESTADO
CIRCUITO DE CONEXION
PROTECCION
CARGA (SEÑALES HACIA EL CAMPO)(lámparas, solenoides, etc.)
!2 0 + $ 1
MODULO DE 32 SALIDAS DE 24V C.C. (A TRANSISTOR) modelo: NNNNN-32
número de salidas: 32 (sink)tipo de conexión: conector frontal extraíble
comunes: 4 (1 cada 8 salidas)tensión de trabajo: 4,75 a 26 VCC
pico máximo de tensión: 36 Vcorriente máxima (resistiva): 0,2A / 1,6A por común
pico máximo de corriente: 1A (10mS)/ 0,5A (100mS)tipo de salida: colector abierto NPN
caída de tensión máxima: 0,6V @ 0,2Acarga mínima: 0,1mA
Tiempo de respuesta OFF ON: 0,1 mSTiempo de respuesta ON OFF: 0,1 mS
Consumo de fuente interna: 250 mA máx.Alimentación externa: 24VCC ± 10% 140mAIndicador de estado: lado lógica

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 14/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 13
- , ' / ' + '
6 $1 $ + 8
* # +6
! $+
+ & $5 0 $ ) 3 '63F(*
*
B $ $> $ & + ? :>
6 ! 63F $# ? 5 ' & A A 0
K > *> :> 5* @ : 5
(*
2 > :> 5* F36
! 3,) * * 2 * )
1* 6 H $
$
PROCESO TRANSMISOR CONVERSOR A/D
PRESION PRESION5 bar 12 mA A 10000000
CORRIENTE D
CAMPO PLC
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 15/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 14
- - *( ! ' 0+ '
! 6 * '>% (* D $ 6 2
$ D '
*D
! $ ' * * , ) * ( , ,D
5 0 $ $D '>* *:*M*?*@* *9* * ( 0
'>> ( 01 4 4 0 $
' > # ($
6 2 * &* $ , *$ 4 K >* K *K > '>>>>>>
( B , $ 6 2 ' $( A #A 4K : K :@ >>> :@@
! 6 $ 2 > * D0 '>>>>>>>>>> ( # :> K >:?
! $6
* *" # :K :@ ?
$ # ':> 5 % ? 5(3:@ K :*@µ 5 * 2> > * > 3:@ K >*>M
! : # :: K ?>= ':> 5 % ? 5(3?> K M*µ 5 > 3?> K >*>>:?
! #'537( K *
0 2
* # $ :, @
"& 537 $
# ' ( 2 *

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 16/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 15
! • Protección : Se encarga de impedir daños al modulo por conexión con polaridad inversa o f
ra del rango permitido.
• Filtro : Elimina posibles ruidos que ingresen por la instalación.• Multiplexado : Esta etapa consiste en un circuito selector que envía un canal de entrada p
vez al conversor A/D.
• Conversor A/D (analógico/digital) : Es el encargado de transformar la señal analógica en unúmero binario que la CPU pueda interpretar.
• Aislación : Luego del conversor se dispone en general de optoaislación para separar el PLdel campo.
• Buffer : Memoria donde se almacenan los valores que provienen del conversor mientras e
opera sobre los demás canales. Desde aquí la CPU "lee" los valores numéricos convertidos.
SEÑALES DESDE EL CAMPO
PROTECCION
FILTRO
MULTIPLEXADO
CONVERSOR ANALOGICO/DIGITAL
AISLACION
BUFFER
BUS DE DATOSSEÑALES HACIA LA CPU
: ,
*) 0
? :> 5* @I* %@ H@I* > >I
*$

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 17/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 16
- 1 ' ! ' 0+ '
! #6" D $
;
/ + &'735( $ )
:* ? $' 2 1 > :> 53> >I(
$ 1
• Buffer : memoria en el módulo donde la CPU escribe los valores binarios a convertir.• Aislación : optoaislación para protección del equipo.
• Multiplexado : circuito que selecciona de a uno por vez los valores almacenados en el buffelos envía al conversor. Este circuito también puede seleccionar el canal a donde se envía el vlor convertido.
• Conversor digital/analógico : Convierte un valor numérico emitido desde la CPU en una seanalógica.
• Protección : Ante inversión de polaridad o sobretensión del campo (fuente externa).
SEÑALES DESDE LA CPUbus de datos
BUFFER
AISLACION
MULTIPLEXADO
CONVERSOR DIGITAL/ANALOGICOPROTECCION
SEÑALES A CAMPO4 A 20mA / 0 a 10V
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 18/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 17
- 2 *( ! '3' ! ' ! " ( ' 4 !5
0
6" D 4 7
! 6 4 7** *
5 # & ! 3B * )' D 4 7( !
* * 2
! ) , 4 7 ' 0 ,( 0
'? 0 ( D
! )(
- 6 *( ! '3' ! ' '" '
7 3)
5 0 $1
• • ';/7(• #• •
6 #7 6"
6 2 * *&
*B
$

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 19/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 18
- 7 *( ! '3' ! ' * + * '
5 # * )
! 6" $, 2 $
0
,$ A A A A
5 1
• Módulo BASIC : Programable en lenguaje BASIC, posee pórticos de comunicación RS23RS422 y se puede utilizar para resolver ecuaciones complejas, para estadística, para adqui
ción de datos, como ingreso de datos desde lectores de código de barras, para ingreso de datos manuales, para almacenamiento de recetas, etc.
• Módulo PID : Resuelve matemática de punto flotante y lazos PID tomando y actualizando esdos de la memoria de la CPU principal.
• Módulo ASCII : Almacena mensajes que pueden emitirse a través de sus pórticos de comuncación por orden del programa de la CPU principal. Ante determinados eventos como alarmasimplemente a requerimiento del usuario, el programa de la CPU principal le ordena a este Mdulo emitir uno de los mensajes pre-almacenados en su memoria. Estos mensajes puedcontener texto fijo, datos variables tomados de la memoria principal, hora y fecha, etc., y pden emitirse a displays alfanuméricos, impresoras, terminales, etc.
• Módulo contador de alta velocidad : El tiempo que le insume a la CPU resolver el progradel usuario hace que este no pueda efectuar conteos de pulsos de alta velocidad. Estos módulos poseen una CPU que se dedica a esta función y pueden dar señales al campo y a la CPU allegar a valores prefijados provocando interrupciones. Las frecuencias que pueden tomar hasta más de 100 kHz y sirven para conectar encoders, caudalímetros a turbina, etc. En mchos casos la entrada puede discriminar sentido de giro de encoders y efectuar conteos ascendentes/descendentes.
• Módulo de posicionamiento : Es una combinación de un módulo contador de alta velocidcon salida para motores paso a paso. Se utilizan para resolver lazos de posicionamiento forma similar a los sistemas de control numérico.
• Módulo experto : Son verdaderas computadoras con discos rígidos, capacidad de manejo dteclado y pantalla. Pueden ejecutar prácticamente cualquier programa que corra en compudoras comerciales. La mayor velocidad de comunicación con la CPU principal, por formar del sistema de entradas/salidas, lo hace especialmente apto para aplicaciones de inteligencartificial (sistemas expertos).
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 20/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 19
- 8 ! ' !
B# 1
• De propósito general : Para conectar computadoras, con fines de programación, supervisió
adquisición de datos, telesupervisión, etc.En la CPU se incluyen pórticos de tipo RS232C, RS422 o especiales para unidades de progmación. Los módulos de comunicación pueden agregar pórticos adicionales, por ejemplobases remotas. Hay módulos de comunicación que incluyen (dentro de los módulos) modetelefónicos con fax, modems de radio, etc.
• Peer to peer : Intercomunicación entre PLC con fines de intercambio limitado de datos sincronizar o enclavar distintas máquinas o procesos. Utilizan protocolos propios de los fcantes.
• Redes : Permiten la integración de muchos PLC, computadoras y equipos varios. Las re
pueden ser propietarias, para comunicación entre equipos de una marca o generales como pejemplo Profibus.

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 21/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 20
1 "
1 '*( * ( ! "
6" ' 6 " " 6 ( #
1
! 2 * *
) 2
$& * * *
ENTRADAS
CPU
SALIDAS
6 *$ 2 !
'!6;= ( $ $ 6"
1 ) (( ! ! "( +(
'( 2
8
FUENTE DEALIMENTACIONMEMORIACPU
PROCESADOR
COMUNICACIONES

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 22/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 21
" 0 0 1
• consultar estado de entradas• resolver el programa de aplicación• atender comunicaciones con módulos inteligentes• atender comunicaciones por pórticos de CPU• ejecutar autodiagnóstico• actualizar las salidas
! $' (
2 )# 2 >>>
'O>*@ 3L(
$ ) *#
&
5 6 $ # * 2+ 2
1 , (
/ $ 2 * 2 ** 3 *
0 $
B D * + #& # )
! $ '( E
$ &E 5 & 1
• área de programa de aplicación (program memory)• registro de entradas/salidas discretas• registro de entradas/salidas analógicas• registro de relés internos (estados discretos)• registro de temporizadores y contadores• registro de variables• área auxiliar (scratch - pad)• programa ejecutivo (sistema operativo)
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 23/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 22
LE $ * $
N *
5 #
1 , * 9 #
! 2 27 +
$ * # $8
! *
$ *
6 # $ 1#
2
• memorias volátiles• memorias no volátiles
! #+ #
0 $ )
## # $
D 6 1
• RAM (Random access memory) : es volátil. Se utiliza como memoria de datos, como scrapad y también para almacenar el programa del usuario. Para evitar el borrado al desconectarPLC de la alimentación, se la usa con baterías tampón o con super condensadores.
• EPROM ó UVPROM : no volátil, una vez grabada solamente se puede borrar exponiéndolauna fuente de luz ultravioleta. Se usa como memoria de sistema operativo, también se la uti

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 24/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 23
como memoria de programa. Para grabarla, en la mayoría de los casos, hay que utilizar un acesorio especial que se conecta al pórtico de comunicación de la CPU.
• EEPROM ó E 2PROM : no volátil, el borrado se realiza mediante señales eléctricas en determnados pines del chip. Hasta hace algunos años era poco usada por su alto costo, hoy en dícada vez más equipos utilizan este tipo de memoria para almacenar el programa del usuarLa CPU’s incluyen la función de borrado y de re-escritura.
• NOVRAM: es una combinación de memoria RAM (volátil) y EEPROM (no volátil), los datmacenados en la parte no volátil son transferidos hacia la parte volátil y viceversa mediante larizaciones adecuadas del chip de memoria. No es usada CPU’s, sólo en algunos módulos epeciales.

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 25/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 24
2 "( +(
0 *$ * * +
,#$ &
2 * *$ $ + # $
$ !- 2 .
! )0 ! , $
$$ , #)
& $ $
*1
#9 9 #:;2 2 #$
2
: ' 9 # $
#*
B &0
0* $ 0
)M < & $
1 +*
$) $
#? $ 9 #
' , ( 7# 2 6 , -
$ E $ & 7

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 26/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 25
# $$ #
0 *, $ $ * , *2 $ E , $ ) *
*
@ ! # 9& $ &
& * * ( #* $
, !6
" # = $- .* #
' 6( B &
& &, #$ 7 -
9 ! # > & $ , ,& $
,
2 + ? ' ! "( +(
2 0 #2 1
• Diagramas de contactos (Relay Ladder Logic)• Programación secuencial (Stage Programming)• Programas en álgebra de Boole (Boolean Mnemonics)• Instrucciones de alto nivel
*A # A $
& * D $$ 2 $
6 6 2 +
2 ! * ,
2 6+ A A* A A* A
(
6*

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 27/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 26
*+ * & * * $ # &
B D $ *# * '
6 *L 2 D
* 2 !M =A<A D $
'J 8 <:?98 ( ! $ & D
2 ! +( ! * * ' ( . !! ( +
! 2 #
# $ $ , &' 0 * * * & * (
#!) # $
* 2 *
! 0 $* ,
*, $ & #
2 < $ $
#* 2 *
J( J *
* * B J* # J
" - .
, # $ +
& *0 !
' + ( - & .) $ #
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 28/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 27
# ' * (& %
" - .
! 2 * $ J JM# 0 8
# # 5<
J + & ' (* +JM ' 0 (* #
&$ , < $ #, * * & <
# # <
B J JM 2
# ! +7 & * *
* ! $J - . $ ,
6
!) 'B!/ 5/ ( $ & &D 2 & 6
& ;!B!/ "N 5/
= * * *
2 ) * #9
&6
J JM
2

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 29/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 28
" & 1
| X2 TMR------T1[------] [------------------------------------------------+- 10.0 --+|
| T1 Y12[------] [--------------------------------------------------( OUT )|
J: & / ; / & #* 0 * /
! 2 & # < : & + ,
! & # $* , # $ / '<
! * *1 * ) *
* B 6' 2 1 / (
* *
& * *6
2 ,
! # * 2 / :>
$ J@ & * & $ J@ *5 & 2 '@>(* #/ :> ! # < :
0 * $ J *! / :> #
| X5 +---------+[------] [------------------------------------------------| CNT || | CT120 || X6 | K50 |[------] [------------------------------------------------+---------+
|| CT120 Y62[------] [--------------------------------------------------( OUT )|

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 30/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 29
!) 3 ' 3 E ( $* ' ( * ' E (
2 - 9 #@ $:
+ D- ). $
!& DB *
$
| ADD ----------+| | | B[-] [---| |- ; : # ; >: *| | R 121 | ; :?>
| | + R 026 || | = R 240 || | || +-------------+
| SUB ----------+| | | ;[-] [---| |- ;>@@ :@>*| | R 055 | ; :>9 | | - K+250 || | = R 207 || | || +-------------+
| MULT ---------+| | | 1[-] [---| |- ; M @ ) @ K ; :>:>| | R 315 || | * K +15 || | = R 2020 || | || +-------------+
| DIV ----------+| | |[-] [---| |- ; :M?> 3 ; :M: K ; M@9| | R 2340 || | / R 2326 || | = R 1357 || | || +-------------+
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 31/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 30
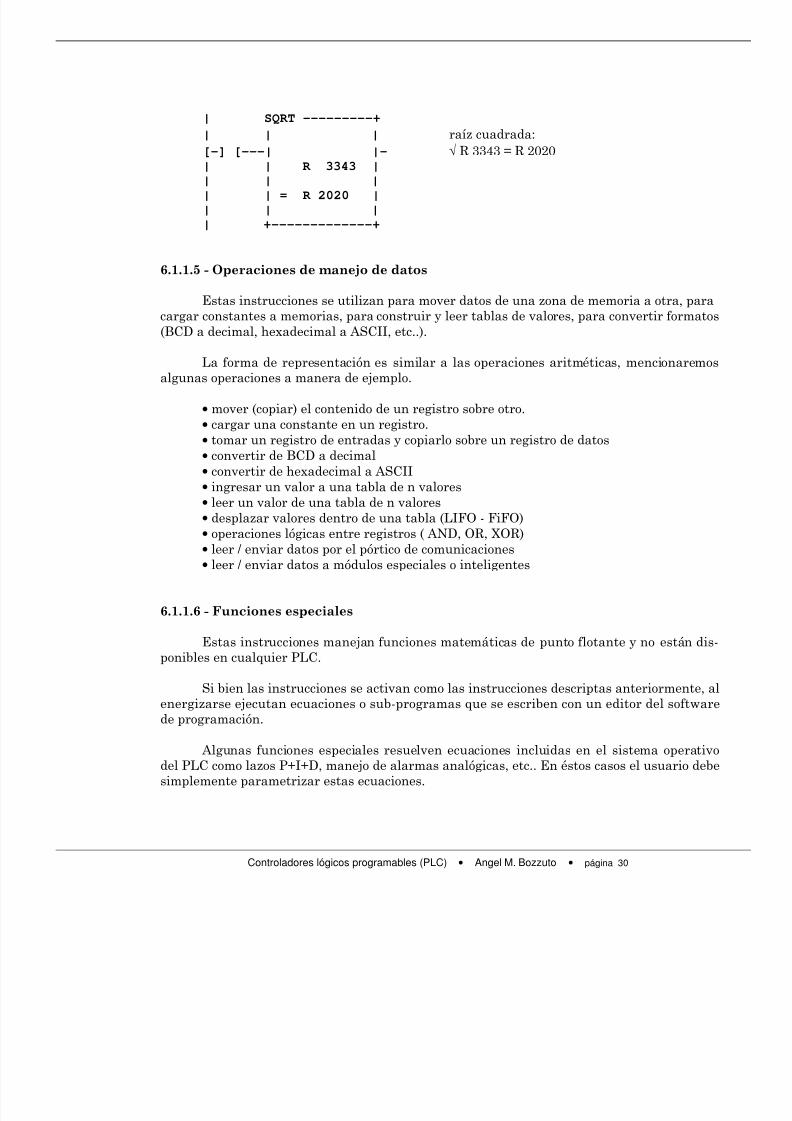
| SQRT ---------+| | | 0& 1[-] [---| |- √ ; MM?M K ; :>:>| | R 3343 || | || | = R 2020 || | || +-------------+
2 1 9 # A
! & &* *
'4 7 * , ) 5B FF* (
+ *2
• ' (••• 4 7• , ) 5B FF••• & ' FP= % P P=(
• ' 5N7* =;* J=;(• 3• 3
2 2 % 9
! 2 #$ 6
B
& 2 % $
56 & 6HFH7* 2 * ! +
&

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 32/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 31
! 2 % 1
| SFPGM55-------+| | || | |
[---] [---| || | || +-------------+
!2 & & 6F71
PID LOOP 1 TITLE: EJEMPLO REMOTE SETPOINT: WX903
CLAMP SP LIMITS: LOW = +0.00000POS/VEL PID ALGORITHM: POS HIGH = +0.00000
LOOP VFLAG ADDRESS: V345SAMPLE RATE (SECS): +1.25000 LOOP GAIN: +1.00000
RESET (INTEGRAL TIME): +INFPROCESS VARIABLE ADDRESS: V1568 RATE (DERIVATIVE TIME): +0.00000
PV RANGE: LOW = +3.00000 FREEZE BIAS: NOHIGH = +97.0000
DERIVATIVE GAIN LIMITING: NOPV IS BIPOLAR: NO LIMITING COEFFICIENT: +10.0000
SQUARE ROOT OF PV: NO20% OFFSET ON PV: YES SPECIAL CALCULATION ON: PV
SPECIAL FUNCTION: SFPGM55LOOP OUTPUT ADDRESS: V611
OUTPUT IS BIPOLAR: NO LOCK SETPOINT: NO20% OFFSET ON OUTPUT: YES LOCK AUTO/MANUAL: NO
LOCK CASCADE: NORAMP/SOAK PROGRAMMED: NO
RAMP/SOAK FOR SP: YES ERROR OPERATION: NONEREVERSE ACTING: NO
ALARM DEADBAND: +12.3450 MONITOR DEVIATION: NODEVIATION ALARM: YELLOW = +80.0000
MONITOR LOW-LOW/HI-HI: YES ORANGE = +90.0000 MONITOR LOW/HIGH: YES
PV ALARMS: LOW-LOW = +3.70000 MONITOR RATE OF CHANGE: NOLOW = +5.00000 RATE OF CHANGE ALARM: +0.00000
HIGH = +89.0000HIGH-HIGH = +93.0000 MONITOR BROKEN XMITTER: YES
2 ) + ? 4 + ( ! 5
! 2 $ $ $# * + 0
* + ) !& 2

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 33/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 32
= 2 ,* * $ #
! 2 & #N=/( ,
. 6
" 0 1
STR X10AND X 36OR NOT X37OUT Y21
! * <: # +' ( JM9Y21 = X10 . (X36 + X37)
|| X10 X36 Y21[------] [-----------] [----+------------------------------( OUT )| || || X37 |[------] /[-------------------+|
5 # 1
• & 0 1 ' D ( B/; ' % (* 7 ' (* =; '• ) 1 5N7* 5• ) 1 =;* =• 1 ="/* K• 1 B!/* B* % ;!B!/* ;* "• & 1 / ;* /=N• 1 /;* N/* "7
| X2 TMR------T1[------] [------------------------------------------------+- 10.0 --+|| T1 Y12[------] [--------------------------------------------------( SET )|
STR X2TMR T1 K 10.0STR T1SET Y12

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 34/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 33
!2 1
2 1
NETWORK10 LDN M3.02 AN M3.14 AN M3.26 TON T37 K30
NETWORK212 LD T3714 = M3.3
NETWORK316 LD I0.018 AN I0.120 A I1.522 A M3.324 S M3.0 K1
NETWORK431 LD M3.033 A Q0.635 A Q1.137 S M2.0 K1
NETWORK544 LDN M3.046 R M2.0 K1
NETWORK653 LD I0.055 A I0.157 A M3.359 S M2.1 K1
2 :10 STR 0001
1 AND 00032 STR 00033 OR T06004 ANDN 00015 ORSTR 6 STR 00337 OR 00348 ANDSTR 9 AND 0040
10 AND 003211 AND 004212 AND 000013 OR 030014 OUT 020015 STR 0200
16 ANDN 030517 ANDN 031418 ANDN 031319 OUT 030020 STR 030021 ANDN 030122 OR 030223 OR 002724 OR 005425 OR 031326 OR 031527 OR 031628 AND 000229 STR 001130 OR 0202
2 , "( +( '
6 # BA A A A #$ !
1 *
• Acción a tomar : Salidas a activar durante la etapa, señales a memorizar, tiempos, etc.
• Condición de salto : Condiciones a cumplir para dejar la etapa presente. Pueden ser e
tradas, tiempos, estados internos, etc.• Destino del salto : Nueva etapa a cumplir cuando se cumplan las condiciones de salto.
2 # * &+ ;5P !/

8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 35/36
Controladores lógicos programables (PLC) • Angel M. Bozzuto • página 34
5 $ E# 26 !
! $ & 2$
$
2 - + ? ! *
5 # & *$ 2 ! , $
2 A )A $ 2 %2 A A* 6 4
% $6 & * * =
0 $ 0
2 ) ! ' " ( "( +( 0
* ),
! * $ $2
$ E $ $$
# L
2 , " ( % ( ' " * ( '
B $ 6 !6;=
* *
+ ' 6 6"* # *
*
8/6/2019 Curso PLC General
http://slidepdf.com/reader/full/curso-plc-general 36/36
6 * (% ' ' " ( ! (
$ #* +0 * *
8
$2 , E , )
6 $ ,E
$ E $, D , )
, # 2
$ 6 $* , *
FB= >>>
= 6+ ', E (
! $ *
* 2 *
I ,A A
N! 5?*