decoupling laser beams with the minimal number of optical elements julio serna december 14, 2000
TRANSCRIPT

Decoupling laser beams with the minimal number of optical
elements
Julio Serna
December 14, 2000
George Nemeş
In collaboration with:
Decoupling laser beams with the minimal number of optical
elements

Outline
• Introduction
• The problem
• The proof
• Consequences and conclusions

Laser beam characterization
ssrsuur dzikzh ),,()exp(),,(
Wigner distribution function (WDF)
Second order characterization
• Beam matrix P (+)
0U
0WWt
t
U
UM
MWP t

Second order characterization
• Gauss Schell model (GSM) beams (+)
)(det k
12 2
g
t
tggg
tIII
σ
RRR
0σσσ
0σσσ
First order optical systems
ABCD matrix:
DC
BAS
S symplectic, JtSJS
0I
I0J

Propagation
tinout SPSP
invariant,
at
4effM
1)(tr 22
1det422
24eff
2MUW
P
k Tkt
kM
4effMta

The problem
(ST beam)
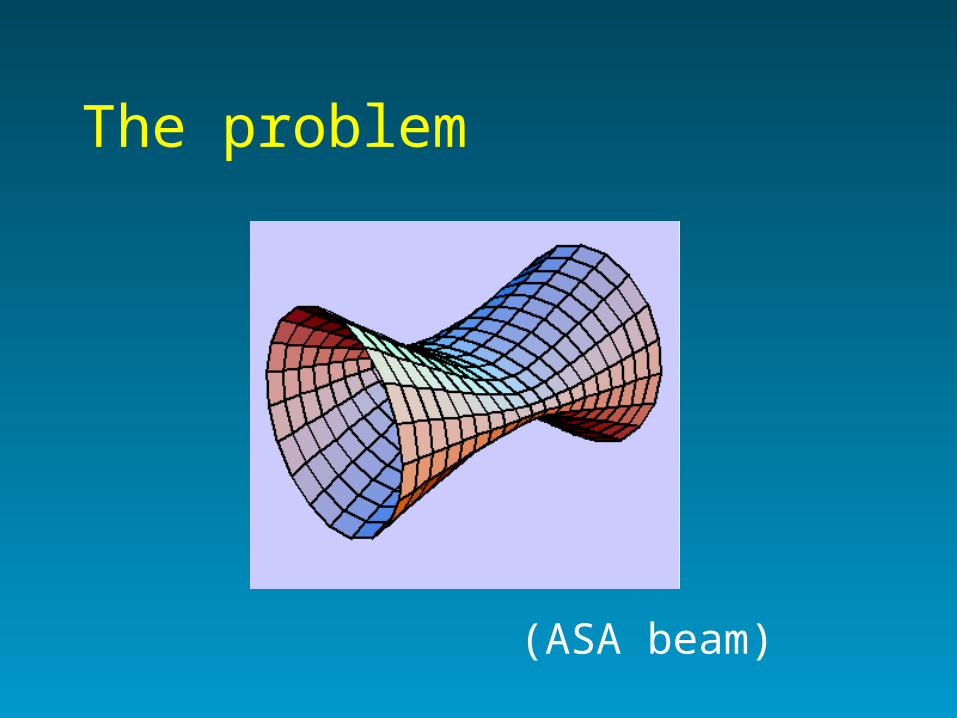
The problem
(ASA beam)

The problem
(GA beam)

The problem
(PST beam?)
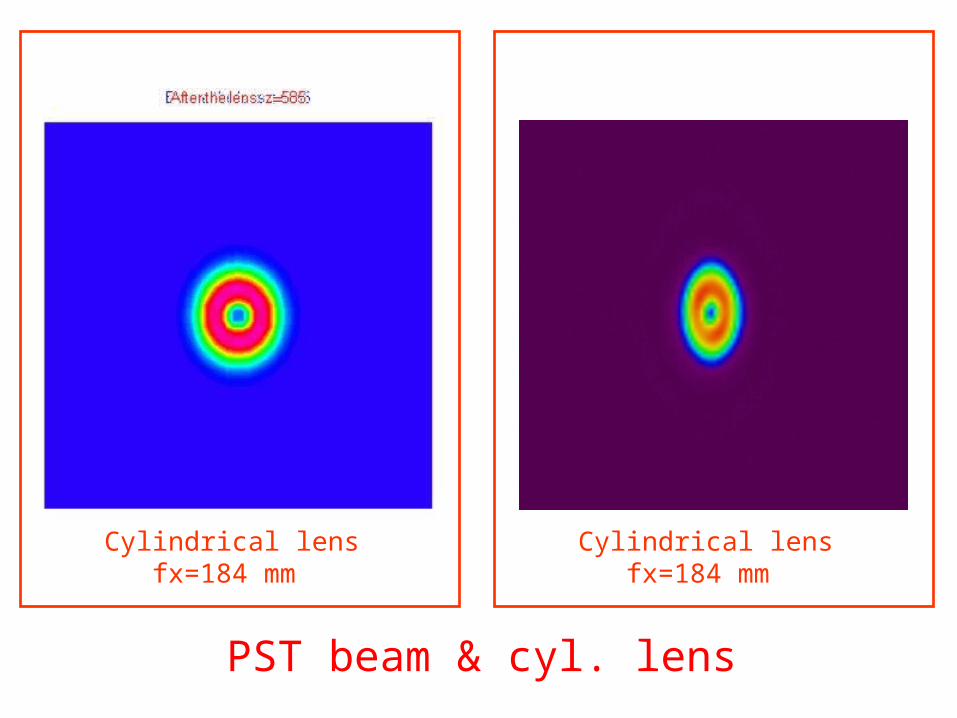
Cylindrical lens fx=184 mm
Cylindrical lens fx=184 mm
PST beam & cyl. lens
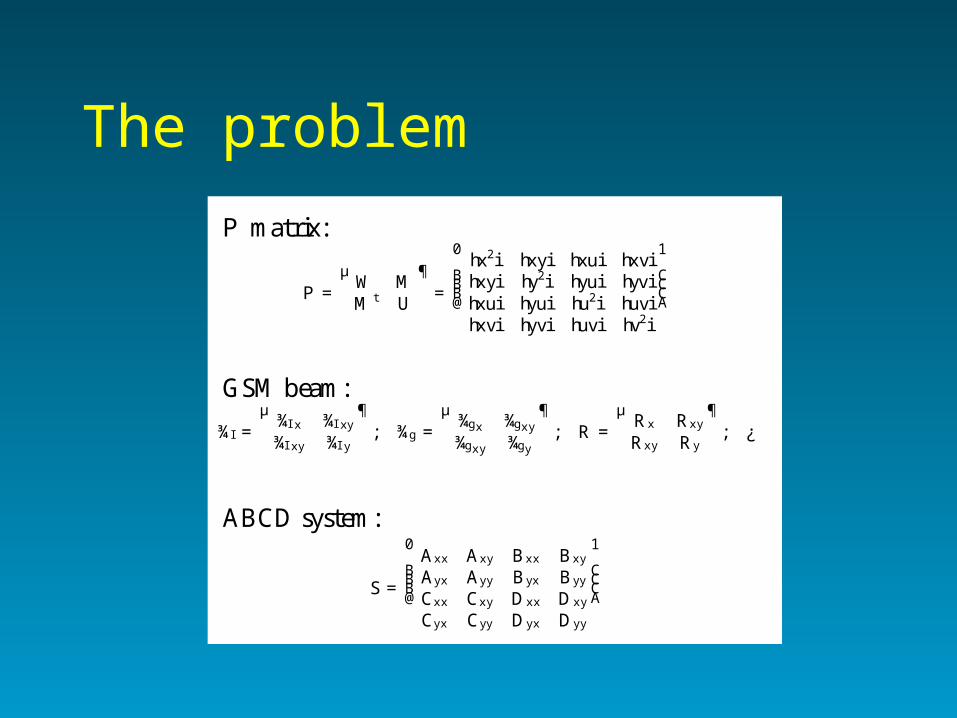
The problem
P matrix:
P =µ
W MM t U
¶
=
0
BBB@
hx2i hxyi hxui hxvihxyi hy2i hyui hyvihxui hyui hu2i huvihxvi hyvi huvi hv2i
1
CCCA
GSM beam:
¾I =µ
¾I x ¾I xy
¾I xy ¾I y
¶
; ¾g =µ
¾gx ¾gxy¾gxy ¾gy
¶
; R =µ
Rx Rxy
Rxy Ry
¶
; ¿
ABCD system:
S =
0
BBB@
Axx Axy Bxx Bxy
Ayx Ayy Byx Byy
Cxx Cxy Dxx Dxy
Cyx Cyy Dyx Dyy
1
CCCA

The problem• Decoupled beam:
(trivial or) no crossed terms
BBB@
CCCA
P matrix:
P =µ
W MM t U
¶
=
0
BBB@
hx2i 0 hxui 00 hy2i 0 hyvi
hxui 0 hu2i 00 hyvi 0 hv2i
1
CCCA
GSM beam:
¾I =µ
¾I x 00 ¾I y
¶
; ¾g =µ
¾gx 00 ¾gy
¶
; R =µ
Rx 00 Ry
¶
; ¿ = 0

The problem
Question: Which is the minimum number of optical systems F, L needed to decouple a (any) laser beam?
Answer: F L F L

Why the question?
• Laser beam properties can be changed using optical systems
• Nice mathematical properties. Further insight into P/GSM, S
• I like it

What do we know
• Any optical system can be synthesized using a finite number of F and L
– Shudarshan et al. (2D/3D) OA85
– Nemes (constructive method) LBOC93
Optical systems

What do we know
• Any beam can be decoupled using ABCD systems
– Shudarshan et al. (general proof, no method) PR85
– Nemes (constructive method) LBOC93
– Anan’ev el al. (constructive method) OSp94
– Williamson (pure math) AJM36
Decoupling
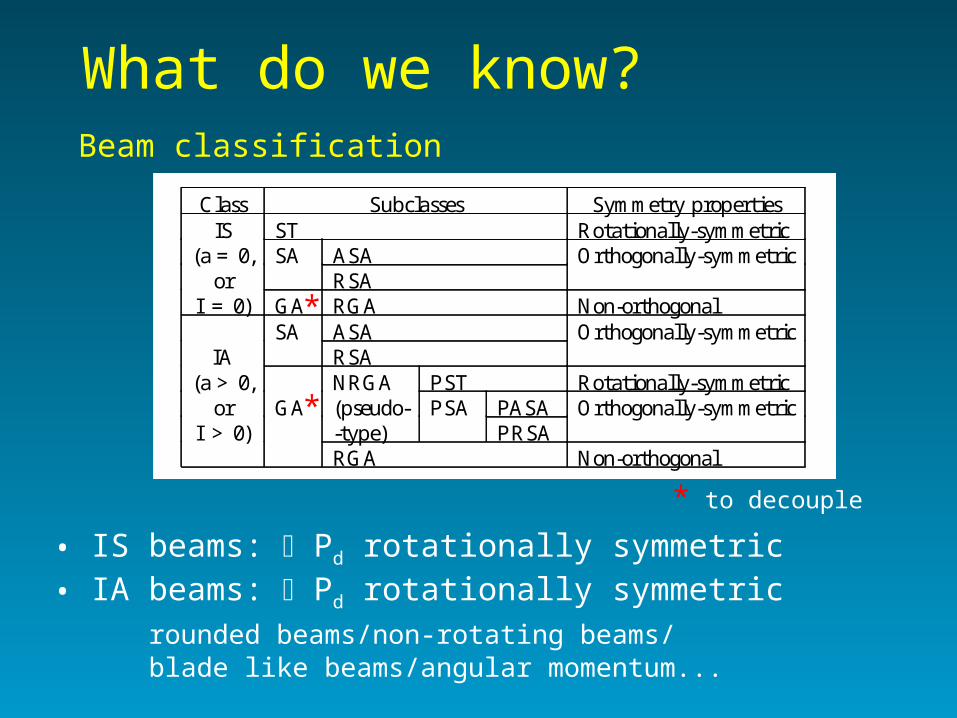
What do we know?Beam classification
Class Subclasses Symmetry propertiesIS ST Rotationally-symmetric
(a = 0, SA ASA Orthogonally-symmetricor RSA
I = 0) GA RGA Non-orthogonalSA ASA Orthogonally-symmetric
IA RSA(a > 0, NRGA PST Rotationally-symmetric
or GA (pseudo- PSA PASA Orthogonally-symmetricI > 0) -type) PRSA
RGA Non-orthogonal
*
*
• IS beams: Pd rotationally symmetric• IA beams: Pd rotationally symmetric
rounded beams/non-rotating beams/blade like beams/angular momentum...
* to decouple
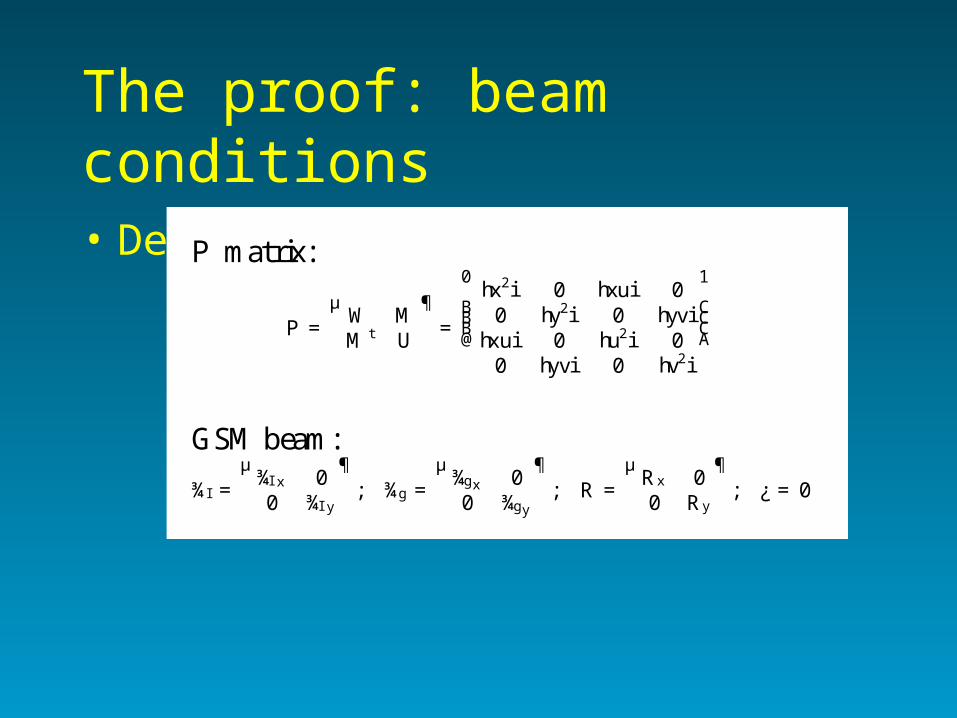
The proof: beam conditions
• Decoupled beam conditions
P: M symmetrical, W, M, U same axes
GSM: I, g, R same axes, = 0
BBB@
CCCA
P matrix:
P =µ
W MM t U
¶
=
0
BBB@
hx2i 0 hxui 00 hy2i 0 hyvi
hxui 0 hu2i 00 hyvi 0 hv2i
1
CCCA
GSM beam:
¾I =µ
¾I x 00 ¾I y
¶
; ¾g =µ
¾gx 00 ¾gy
¶
; R =µ
Rx 00 Ry
¶
; ¿ = 0
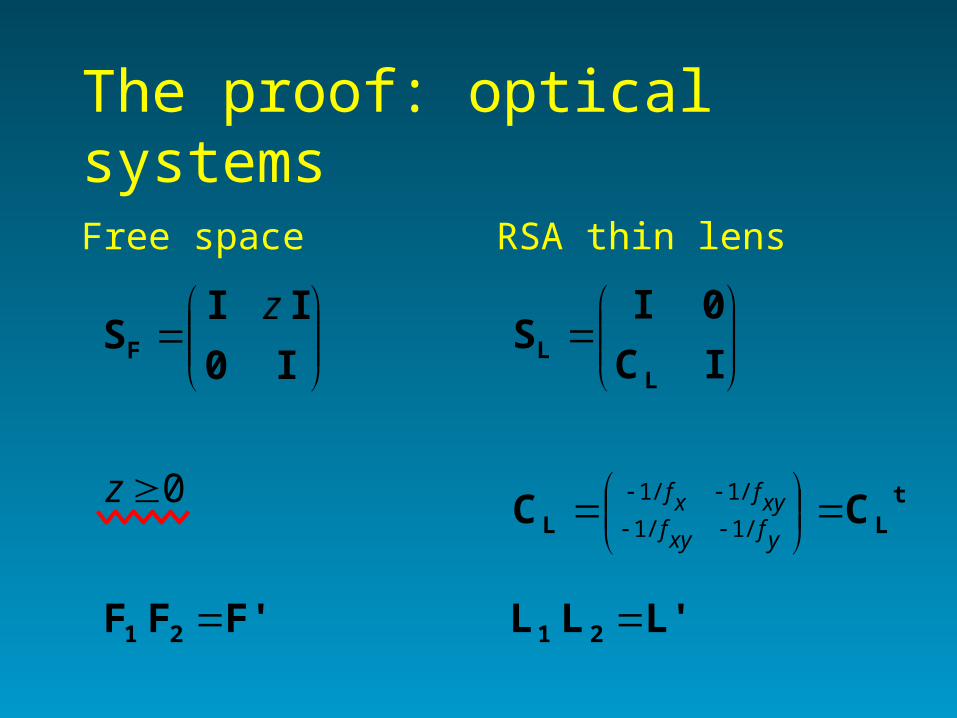
The proof: optical systems
Free space RSA thin lens
tLL
LL
CC
IC
0IS
yfxyfxyfxf
/1/1
/1/1
L'LL 21 F'FF 21
0
z
z
I0
IISF
1. F (free space)
• Impossible: F does not change ST, ASA or RSA property
• Consequences: – no use alone– no point in having F at the end
2. L (single lens)
• GSM
,, gI σσ
axes diagonalcommon ,
0
gI σσ
τ
L / beam is decoupled lens R
does not affect
conditions:

2. L (single lens)
• P matrix
0)tr(δ
0)tr(δ
2
1
WJU MJM
WJM
01
10J
L / beam is decoupled

2. L (single lens)
L / beam is decoupled
Note: last element L: end in waist possible
L covers all IS beams, and more
00δ1
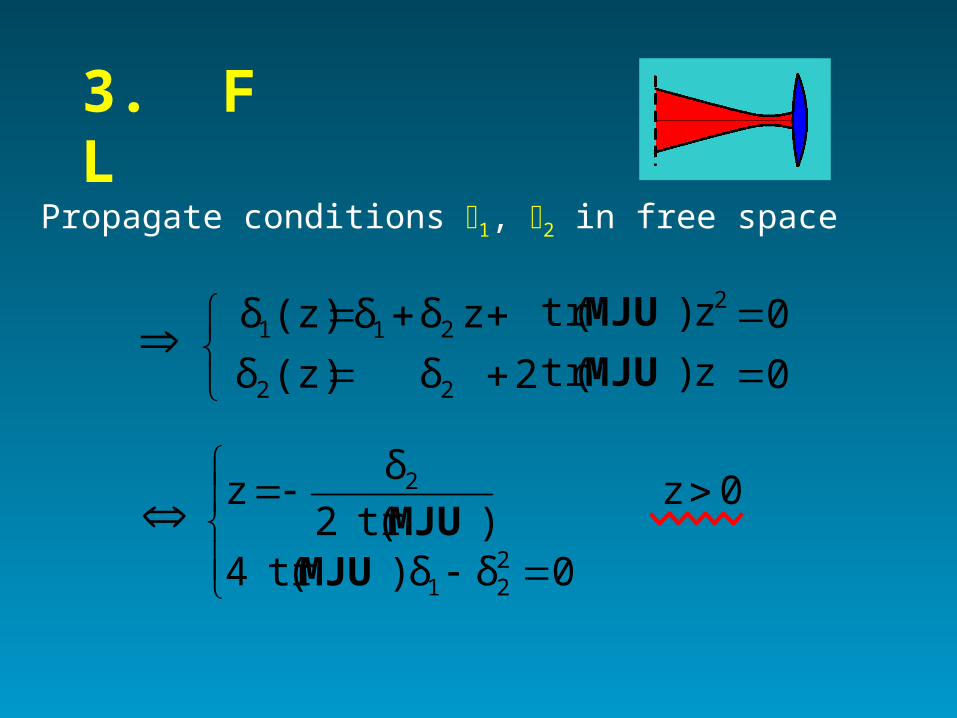
3. F L
Propagate conditions 1, 2 in free space
0
0
z)(tr
z)(tr
2δ
zδδ
(z)δ
(z)δ 2
2
21
2
1
MJU
MJU
0δδ )( tr 4
0z )( tr 2
δz
221
2
MJUMJU

3. F L
Beams not decoupled via F, FL:
1. PST, PASA, PRSA
(z) = 0 constant 1(z) 0
go to LFL
2. What if 1(z) = = 0 but 2(z) 0?
go to LFL? Not enough
1(z) = = 0 invariant under L
go to FLFL (at least!)

4. L F L
• Left beams: (z) 0
• Aproach: find a particular solution
a. NRGA (pseudo-symmetrical, twisted phase) beams
b. RGA (twisted irradiance) + (z) 0
4a. L F L, NRGA beams
1. L1 to have tr M = 0 (waist)
2. Use a “de”twisting system– Simon et al. (matrix) JOSAA93
– Beijersbergen et al. OC93
– Friberg et al. josaa94
– Zawadzki (general case) SPIE95 L F L
L1 L2 F L = L F L

4b. L F L, RGA with (z) 0
1. GA PST, PASA, PRSA: L is enough, since (z) 0
2. Go to 4a
L’ L F L = L” F L

5. F L F L
• Leftovers from F L: beams with 1(0) = (z) = 0
2 0
Solution:free space F ( is not invariant under
F) then go to L F L

0)()(
/0
21
LL
L
zz
z
0LzYES
NO
YESYES
YES
NONO
)0(
0)(1
Lz
P/GSM
Use L
Use LFL
Use FLNO (zL>0)
P PRSA
Use F Use LConverts into PRSAModifies 1/

Consequences and conclusions
To decouple any beam we need FLFL or less
The output beam can be at its waist We can use the result to “move around”
P P’ solved via P Pd P’
Engineering: starting point to handle GA (rotating or non rotating beams)
