detecÇÃo de fumaÇa em vÍdeos para monitoramento de … · para o seu funcionamento. uma maneira...
TRANSCRIPT

DETECÇÃO DE FUMAÇA EM VÍDEOS PARA MONITORAMENTO DE ÁREAS AMBIENTAIS
ADRIANO L. SANTOS*, DENER E. BORTOLINI*, HANI C. YEHIA*, DOUGLAS A. G. VIEIRAǂ, HERMES A. MAGALHÃES*, CARLOS A. M. NASCIMENTOᵜ
* UNIVERSIDADE FEDERAL DE MINAS GERAIS
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA AVENIDA ANTÔNIO CARLOS, 6627, BELO HORIZONTE-MG, BRASIL
ǂ ENACOM
PARQUE TECNOLÓGICO DE BELO HORIZONTE (BH-TEC) RUA PROFESSOR JOSÉ VIEIRA MENDONÇA, 770, SALA 406, BELO HORIZONTE-MG, BRASIL
ᵜ CEMIG – COMPANHIA ENERGÉTICA DE MINAS GERAIS
AVENIDA BARBACENA, 1200, BELO HORIZONTE-MG, BRASIL
E-MAILS: [email protected], [email protected], [email protected], [email protected], [email protected], [email protected]
Abstract⎯ The objective of this work is the development of a smoke detection system by means of video sequences, which are able to detect smoke in early stages of formation. Smoke detection is carried out in three stages: initially, video regions of interest are detected using background subtraction to identify moving objects. In the second stage, objects in movement detected are classified according to their colours. Finally, in the third stage, the temporal persistence of the pixels in the regions interest is analysed. The pixels that satisfy the rules defined in the three stages are considered to be smoke. The system presented in this work is compared with other systems found in the literature through tests with a database of videos containing smoke images and videos containing objects that resemble smoke. The accuracy obtained in the tests, confirmed by statistical analysis, attains 83%, which is between 8% and 30% higher than the accuracy attained by methods in the literature based on chromaticity analysis, motion detection and signal processing. The method proposed is part of an environmental monitoring project based on images of areas covered by electric transmission lines.
Keywords⎯ smoke detection, computer vision, pattern recognition, forest fires, background subtraction, clustering.
Resumo⎯ O objetivo deste trabalho é o desenvolvimento de um sistema de detecção de fumaça por meio de sequências de vídeo, as quais são ca-pazes de detectar fumaça em estágios iniciais de formação. A detecção de fumaça é realizada em três etapas: inicialmente, as regiões de interesse do vídeo são detectadas usando subtração de fundo para identificar objetos em movimento. Na segunda etapa, os objetos em movimento detectados são classificados de acordo com suas cores. Finalmente, na terceira fase, a persistência temporal dos pixels em regiões de interesse é analisada. Os pixels que satisfazem as regras definidas nas três etapas são considerados como fumaça. O sistema apresentado neste trabalho é comparado a outros sistemas encontrados na literatura por meio de testes com uma base de dados de vídeos contendo imagens de fumaça e vídeos contendo objetos que lembram fumaça. A precisão obtida nos testes, confirmada por análise estatística, alcança 83 %, valor entre 8 % e 30 % superior à precisão alcan-çada por meio de métodos na literatura baseados em análise de cromaticidade, detecção de movimento e processamento de sinais. O método pro-posto é parte de um projeto de monitoramento ambiental baseado em imagens de áreas cobertas por linhas de transmissão elétrica.
Palavras-chave⎯ detecção de fumaça, visão computacional, reconhecimento de padrões, incêndios florestais, subtração de fundo, agrupamento.
1 Introdução
Os incêndios consomem anualmente grandes áreas de florestas, sendo muitas destas áreas zonas protegidas onde existem espécies da fauna e da flora em extinção. Além disso, as queimadas em áreas onde existem torres de alta tensão instaladas causam prejuízo a estas torres e a toda a estrutura envolvida para o seu funcionamento. Uma maneira eficiente de prevenir a destruição das florestas é por meio do seu monitoramento contínuo, de forma a extinguir rapi-damente eventuais focos de incêndio. A detecção precoce de incêndios permite uma rápida resposta capaz de evitar perdas ambientais, de vidas e de bens.
Para uma detecção precoce de incêndio, existe a tradicional vigilância humana e sistemas baseados em sensores que realizam análise química. Entretan-to, técnicas de sensores, tem alto custo financeiro inerente ao grande número de sensores e à manuten-ção dos mesmos. De qualquer forma, uma boa ma-
neira de evitar os estragos causados por um incêndio é antecipar a detecção do fogo por meio da detecção de focos de fumaça em estágio inicial.
O algoritmo apresentado neste trabalho faz parte do Projeto CEMIG-ANEEL D383 de monitoramento ambiental utilizando imagens das áreas cobertas por linhas de transmissão e reconhecimento de padrões. Neste projeto, câmeras de vídeo são instaladas em torres de transmissão permitindo, desta forma, utili-zar as imagens fornecidas pelas câmeras para detec-ção de fumaça. Especificamente, este trabalho tem como objetivo detecção de fumaça proveniente de incêndios florestais em estágio inicial, onde a fumaça contém uma grande quantidade de vapor de água sendo, por esta razão, predominantemente branca.
O processo de detecção de fumaça é realizado três etapas: primeiramente detecta-se as regiões de movimento nas sequências de vídeo fornecidas pelas câmeras; em seguida, os pixels das regiões de movi-mento são classificados quanto à sua cor com o obje-
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3938

tivo de selecionar os pixels com cor de fumaça; por fim, na terceira etapa, analisa-se a persistência dos pixels contidos nas regiões de movimento classifica-dos como possuindo cor de fumaça. Caso haja pixels detectados na terceira etapa, dispara-se um alarme de presença de fumaça.
Este trabalho é divido em cinco partes: introdu-ção; revisão de literatura, onde será feita a descrição de métodos e técnicas utilizadas em projetos com objetivos semelhantes; desenvolvimento do algorit-mo de detecção de fumaça, onde é feita a descrição de todas as etapas do método proposto; resultados obtidos nos testes realizados com o método proposto e, por fim, a conclusão.
2 Trabalhos anteriores
Vários esforços foram realizados para detectar fumaça em sequências de vídeos e em imagens está-ticas. Uma síntese dos trabalhos analisados é apre-sentada a seguir.
Kopilovic et al. (2000) analisaram o movimento da fumaça através da técnica de fluxo óptico, obten-do a entropia da distribuição de movimento da fuma-ça como característica para diferenciar movimento da fumaça de qualquer outro tipo de movimento.
Vicente et al. (2001) extraíram os movimentos da fumaça em pequenas envoltórias espaciais e agru-param estes movimentos em uma curva fractal. Além disso, realizou-se uma análise dos níveis de cinza de acordo com o movimento da fumaça ao longo do tempo.
De forma similar, Vicente et al. (2002) explora-ram o movimento da fumaça, extraindo movimentos locais obtidos com análise de clusters de pontos em um espaço multidimensional-temporal. O objetivo principal do artigo é rastrear envoltórias dinâmicas e locais de pixels. Histogramas de distribuição de velo-cidade são então usados para discriminar o movimen-to da fumaça de fenômenos naturais, como nuvens e árvores sacudidas pelo vento, que também possuem envoltórias de pixels, com base em características de seus movimentos.
Toreyin et al. (2005) utilizaram subtração de fundo para segmentar regiões em movimento e o monitoramento da diminuição da energia em alta frequência espacial da cena por meio da transforma-da wavelet espacial das imagens atuais e das imagens de fundo. Os autores afirmam que as arestas da fu-maça são importantes porque elas produzem máxi-mos locais no domínio da transformada wavelet. Com isso deduz-se que uma diminuição nos valores de máximos locais é um indicador de fumaça. Além disso, a cena se torna mais cinzenta quando há fuma-ça e isso leva à diminuição dos valores de crominân-cia dos pixels da imagem. São também analisadas características das bordas da fumaça, bem como da convexidade das regiões de fumaça. Combinando todas essas hipóteses toma-se a decisão final. Os re-sultados obtidos foram aprimorados em Toreyin et al. (2006) onde foram realizadas a segmentação de obje-tos em movimento e a análise de frequências da ima-
gem através da transformada wavelet. As variações de energia obtidas com a transformada wavelet foram utilizadas para o treinamento de um modelo oculto de Markov usado para detecção de fumaça.
Chen et. al. (2006) utilizaram somente uma regra estática de cromaticidade para detecção de fumaça. Nesse caso, qualquer objeto em movimento que te-nha cor de fumaça será detectado como tal.
Yuan et al. (2008) usaram um modelo acumula-tivo de orientações de movimento para realizar de-tecção de fumaça em tempo real. Seu modelo pode eliminar a maioria dos conflitos entre luzes artificiais e outros objetos que não são fumaça. Além disso, o trabalho realiza a análise de movimento juntamente com análise de cromaticidade dos objetos. Entretan-to, o autor consegue detectar fumaça espalhando-se somente em algumas direções.
Damir et al. (2009) propõem classificar a fumaça utilizando um classificador Bayes ingênuo para sepa-rar as regiões candidatas a fumaça e, juntamente com o classificador, fazer análise de cor de tais regiões. Porém, o autor usou somente imagens de fumaça para teste, de forma que o seu sistema poderá detec-tar erroneamente objetos parecidos com fumaça.
Calderara et al. (2011) utilizaram a transformada wavelet juntamente com teoria de decisão bayesiana para detecção de fumaça. Novamente, somente ima-gens de fumaça foram utilizadas no treinamento e teste do algoritmo, não sendo possível determinar o comportamento do mesmo no caso de imagens com objetos parecidos com fumaça.
Tung et al. (2011) realizaram segmentação das regiões em movimento juntamente com a utilização de lógica nebulosa para agrupar regiões candidatas a fumaça entre as regiões em movimento. A seguir são extraídos parâmetros de características espaciais e temporais das regiões candidatas a fumaça. Esses parâmetros incluem um vetor de movimento, rugosi-dade da superfície e aleatoriedade da área de fumaça. Os parâmetros extraídos são então usados como ca-racterísticas de entrada para treinar um classificador SVM (Support Vector Machine) que é usado para tomada de decisão.
Yuan (2012) propõe uma arquitetura para extrair características invariantes na forma da fumaça. Além disso, é utilizado o classificador de padrões Adaboost para melhorar o desempenho da classificação das características extraídas.
Este trabalho vem trazer melhorias no procsso de detecção de fumaça onde a terceira etapa do algorit-mo proposto nesse trabalho visa analisar o movimen-to dos objetos detectados e verificar características como velocidade e área de movimento, dessa forma evitando que objetos semelhantes a fumaça em está-gio inicial, como carros, nuvens, e outros sejam de-tectados como fumaça.
3 O algoritmo de detecção de fumaça A seguir, são descritas as etapas de desenvolvi-
mento do algoritmo proposto neste trabalho chama-do, daqui em diante, D383S (sendo D383 uma refe-
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3939

rência ao projeto de pesquisa no qual o algoritmo está inserido e S uma abreviação para smoke).
Uma das características mais exploradas para a segmentação de fumaça em vídeo é o espaço de co-res, como visto na seção anterior. De maneira intuiti-va percebemos que existem fumaças mais claras e outras mais escuras. Este trabalho é focado na fuma-ça clara, pois esta representa a cor da fumaça no seu estágio inicial em situações de incêndios florestais devido à presença de água no material queimado. Antecipa-se, assim, um incêndio de grandes propor-ções onde a fumaça passa a ter cor predominante-mente escura.
Entretanto, esta característica sozinha não é sufi-ciente para classificação de fumaça devido ao fato que podem aparecer nos vídeos diversos objetos de cor similar à fumaça, tais como nuvens, carros, etc. Segundo Friedlander (2000), outro fato observado é que o movimento da fumaça é lateral e ascendente. Porém, isto depende do referencial a partir do qual a câmera obtém as imagens. Ainda sobre o movimento da fumaça observa-se que, à medida que a intensida-de das chamas aumenta, a velocidade de movimento da fumaça também aumenta. Ainda segundo Frie-dlander (2000), a área da fumaça também cresce à medida que o tempo passa, passando a manter seu tamanho ou se dispersar quando fica muito grande ou distante do foco que a gerou.
O fluxograma exibido na Figura 1 mostra, de forma resumida, as etapas do sistema implementado.
Figura 1. Fluxograma contendo as etapas do método D383S.
3.1 Segmentação de movimento através de subtração de fundo
A subtração de fundo consiste em selecionar um quadro que servirá como fundo da imagem, o qual não pode conter objetos em movimento ou qualquer outro tipo de objeto que não pertença ao fundo. Em seguida, é calculada a diferença pixel a pixel entre o quadro atual e o quadro de fundo. Caso esta diferen-ça seja menor que um limiar definido, esse pixel per-tence ao fundo, caso contrário, pertence ao objeto detectado (Ferreira, 2007).
Com base nos estudos de Piccardi (2004) a pri-meira etapa do sistema de detecção de fumaça em vídeos é baseada no algoritmo de subtração de fundo estimado pela média adaptativa. Esta técnica foi pro-posta por Donohoe et. al. (1988) que desenvolveram um formato adaptativo para criar o modelo de fundo de uma sequência de imagens. Neste algoritmo é utilizada uma taxa α que determina quanto o quadro
atual i exerce influência no modelo de fundo atual. O modelo de fundo Bi é iniciado com o primeiro quadro e os próximos quadros atualizam o modelo da forma a seguir
(1)
onde α ∈ [0,1], i é o número de quadros do vídeo, fi(x,y) é o quadro atual, Bi(x,y) é o fundo atual e (x,y) são as coordenadas dos pixels do quadro e do fundo atual. Um limiar τ é determinado para identificar a região de interesse que não pertença ao fundo. Então é feito o cálculo da diferença do quadro atual e do quadro calculado como quadro de fundo (background)
(2)
onde Ai(x,y) é o alvo a ser identificado, fi(x,y) é o quadro atual e Bi(x,y) é o fundo atual. O resultado do processo de segmentação para o i-ésimo quadro de entrada Ai(x,y) será 1 (um) para cada pixel de Ai(x,y) se a diferença entre o quadro atual e o fundo for mai-or que o limiar τ previamente definido, ou 0 (zero), caso contrário. Essa diferença é calculada pixel a pixel nos quadros do vídeo.
É necessário que o limiar τ da subtração de fun-do seja previamente ajustado de acordo com a reso-lução e características específicas do vídeo em ques-tão e do ambiente a ser analisado.
O mesmo deve ser feito com o parâmetro α. Ca-so α seja definido com um valor muito próximo a 0 (zero), o fundo se adapta muito lentamente às altera-ções no cenário, ou seja, o cenário pode ser modifi-cado e o modelo do fundo pode não corresponder a esse cenário, podendo dessa forma levar o algoritmo a detectar falsos positivos por um longo período de tempo. Já quando α é definido com um valor muito próximo a 1 (um), o fundo irá se adaptar rapidamente às alterações no cenário e essa velocidade na adapta-ção pode fazer com que partes dos alvos sejam per-didas por serem consideradas como partes integran-tes do fundo.
Os valores de α e τ foram determinados experi-mentalmente através de testes em vídeos com e sem imagens de fumaça, em ambientes externos e inter-nos. Note-se que não existem valores padrão para os parâmetros envolvidos na subtração de fundo (Dede-oglu, 2004; Collins, 2000). A Figura 3 mostra o re-sultado do processo de subtração de fundo em um vídeo contendo fumaça.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3940
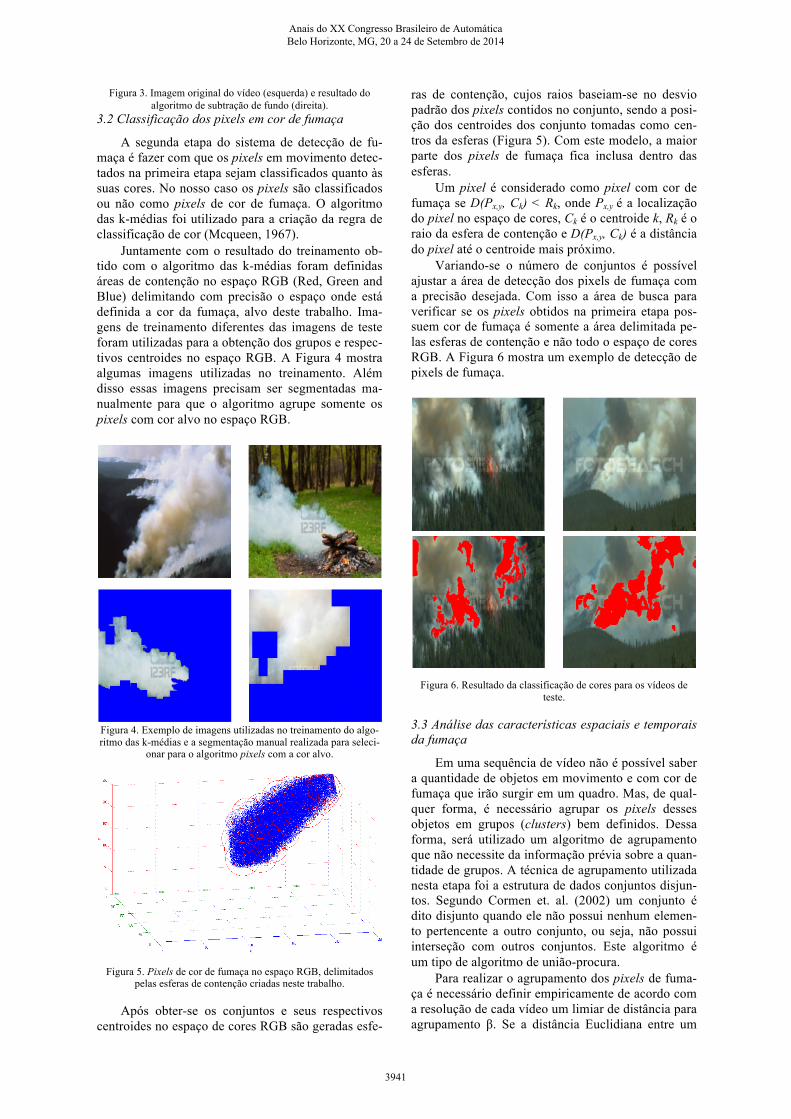
Figura 3. Imagem original do vídeo (esquerda) e resultado do algoritmo de subtração de fundo (direita).
3.2 Classificação dos pixels em cor de fumaça
A segunda etapa do sistema de detecção de fu-maça é fazer com que os pixels em movimento detec-tados na primeira etapa sejam classificados quanto às suas cores. No nosso caso os pixels são classificados ou não como pixels de cor de fumaça. O algoritmo das k-médias foi utilizado para a criação da regra de classificação de cor (Mcqueen, 1967).
Juntamente com o resultado do treinamento ob-tido com o algoritmo das k-médias foram definidas áreas de contenção no espaço RGB (Red, Green and Blue) delimitando com precisão o espaço onde está definida a cor da fumaça, alvo deste trabalho. Ima-gens de treinamento diferentes das imagens de teste foram utilizadas para a obtenção dos grupos e respec-tivos centroides no espaço RGB. A Figura 4 mostra algumas imagens utilizadas no treinamento. Além disso essas imagens precisam ser segmentadas ma-nualmente para que o algoritmo agrupe somente os pixels com cor alvo no espaço RGB.
Figura 4. Exemplo de imagens utilizadas no treinamento do algo-ritmo das k-médias e a segmentação manual realizada para seleci-
onar para o algoritmo pixels com a cor alvo.
Figura 5. Pixels de cor de fumaça no espaço RGB, delimitados
pelas esferas de contenção criadas neste trabalho.
Após obter-se os conjuntos e seus respectivos centroides no espaço de cores RGB são geradas esfe-
ras de contenção, cujos raios baseiam-se no desvio padrão dos pixels contidos no conjunto, sendo a posi-ção dos centroides dos conjunto tomadas como cen-tros da esferas (Figura 5). Com este modelo, a maior parte dos pixels de fumaça fica inclusa dentro das esferas.
Um pixel é considerado como pixel com cor de fumaça se D(Px,y, Ck) < Rk, onde Px,y é a localização do pixel no espaço de cores, Ck é o centroide k, Rk é o raio da esfera de contenção e D(Px,y, Ck) é a distância do pixel até o centroide mais próximo.
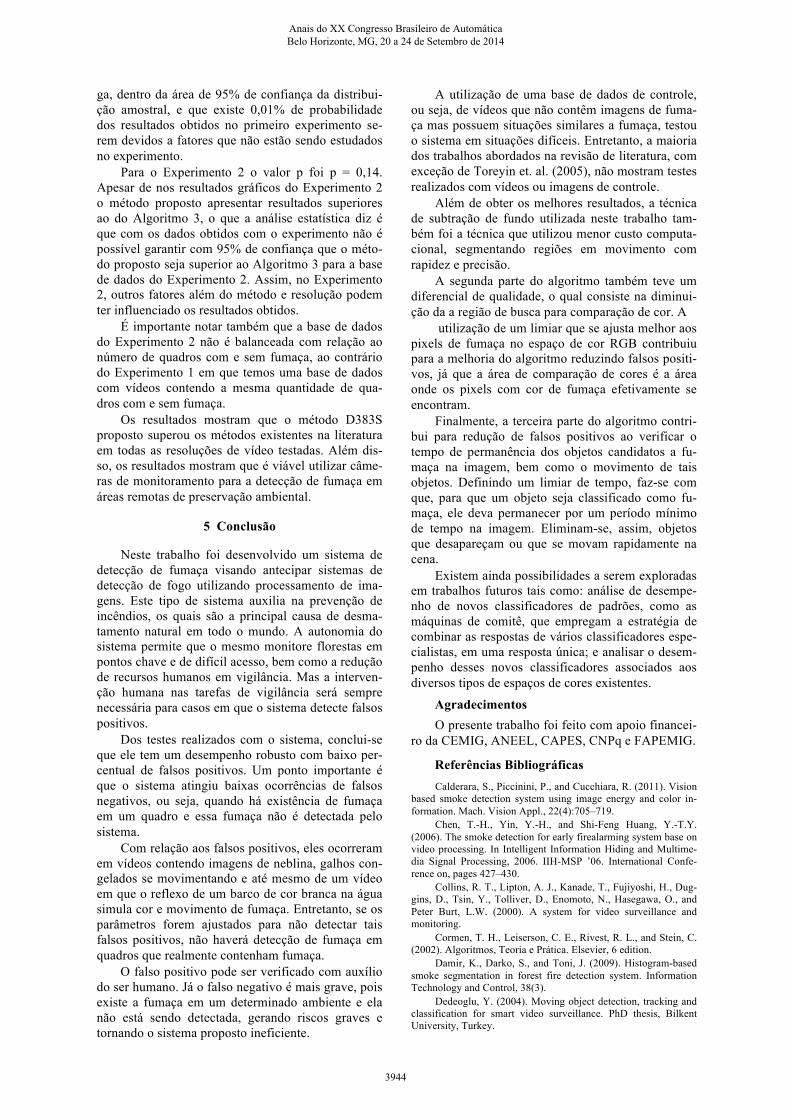
Variando-se o número de conjuntos é possível ajustar a área de detecção dos pixels de fumaça com a precisão desejada. Com isso a área de busca para verificar se os pixels obtidos na primeira etapa pos-suem cor de fumaça é somente a área delimitada pe-las esferas de contenção e não todo o espaço de cores RGB. A Figura 6 mostra um exemplo de detecção de pixels de fumaça.
Figura 6. Resultado da classificação de cores para os vídeos de
teste.
3.3 Análise das características espaciais e temporais da fumaça
Em uma sequência de vídeo não é possível saber a quantidade de objetos em movimento e com cor de fumaça que irão surgir em um quadro. Mas, de qual-quer forma, é necessário agrupar os pixels desses objetos em grupos (clusters) bem definidos. Dessa forma, será utilizado um algoritmo de agrupamento que não necessite da informação prévia sobre a quan-tidade de grupos. A técnica de agrupamento utilizada nesta etapa foi a estrutura de dados conjuntos disjun-tos. Segundo Cormen et. al. (2002) um conjunto é dito disjunto quando ele não possui nenhum elemen-to pertencente a outro conjunto, ou seja, não possui interseção com outros conjuntos. Este algoritmo é um tipo de algoritmo de união-procura.
Para realizar o agrupamento dos pixels de fuma-ça é necessário definir empiricamente de acordo com a resolução de cada vídeo um limiar de distância para agrupamento β. Se a distância Euclidiana entre um
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3941

pixel A e um pixel B for menor que o limiar β, estes pixels farão parte de um mesmo cluster. A Figura 7 mostra os pixels de fumaça agrupados na terceira etapa do algoritmo.
(a) Original (b) Resultado
Figura 7. Resultado da etapa de agrupamento.
Cada pixel carrega uma medida de distância na cena, possibilitando a medição da distância entre objetos a serem considerados conjuntos disjuntos. A cada conjunto disjunto criado (cluster) é atribuída uma cor diferente.
A seguir, é necessário remover pequenos grupos de pixels que sejam oriundos da etapa de agrupamen-to, os quais são gerados muitas vezes por ruído nas imagens, podendo gerar falsos positivos. Para remo-ver esses pequenos grupos destacados com círculos na Figura 7 foi criado um limiar de tamanho mínimo dos grupos βmin de forma que sejam selecionados somente grupos com um número de pixels relevante. O limiar de tamanho mínimo de grupos é ajustado de acordo com a resolução do vídeo testado.
Com os grupos formados e com o tamanho rele-vante definido de acordo com a resolução do vídeo a ser testado, a próxima etapa é realizar a análise de movimento dos objetos na cena. Para isso foi criado um limiar de movimento do grupo βmov. Este valor é dado em pixels e é usado nas duas dimensões da cena (largura e altura). Esta metodologia permite que um grupo se desloque em uma área razoavelmente gran-de da cena ao longo do tempo, característica esta necessária devido ao movimento de expansão da fu-maça. Esta metodologia é usada por Celik (2007) permitindo que possam ser excluídos da cena objetos que se movam linear e rapidamente, como uma pes-soa ou um carro.
Para a análise temporal dos objetos foi usado um conceito baseado no algoritmo de colônia de formi-gas (Dorigo, 1999). Vale lembrar que não está sendo implementado aqui nesta etapa o algoritmo de colô-nia de formigas, mas somente o conceito de tempora-lidade presente na técnica. Duas variáveis temporais baseadas no comportamento de depósito e evapora-ção de feromônios foram adicionadas ao algoritmo D383S e serão utilizadas juntamente com as caracte-rísticas espaciais da fumaça, onde cada grupo regis-trado nos quadros passados são análogos a um cami-nho da técnica de colônia de formigas. Uma matriz M foi gerada, onde são guardadas as informações relevantes de cada grupo detectado ao longo do tem-po no vídeo. Cada entrada desta matriz representa um grupo de pixels detectado e agrupado anteriormente Si contendo as seguintes informações: ponto médio
do grupo Pm, existência Vex e atualização Vat. A vari-ável Vex contém a quantidade de quadros em que um grupo capturado persiste segundo suas características temporais e espaciais, enquanto a Vat informa a quan-tos quadros o grupo não recebe uma atualização.
Para que a variável de existência Vex seja incre-mentada é necessário que o objeto na cena esteja se movimentando dentro de uma área determinada pelo parâmetro βmov. Desta forma, cada grupo no quadro atual terá o seu ponto médio PmA subtraído do ponto médio de grupos anteriores Pmi que estavam em quadros anteriores e estão contidos na matriz M. Ca-so o valor absoluto desta diferença esteja dentro da área delimitada por βmov, o ponto médio do grupo já existente na matriz Pmi será atualizado para o novo valor do ponto médio do grupo do quadro atual PmA. Isto indica que este grupo é o mesmo grupo do qua-dro anterior, tendo seu ponto médio alterado (indica movimento do objeto), sua Vex incrementada e sua Vat zerada.
Para que um grupo seja classificado como fuma-ça, ele deverá ter um valor de existência Vex, que será controlado por um limiar de persistência temporal e espacial Vper. Este limiar é dado em quadros. Quando a variável de existência Vex de um grupo ultrapassa esse limiar Vper, esse grupo é persistido temporal e espacialmente. Um exemplo é mostrado na Figura 8.
Figura 8. Resultado de detecção de fumaça em sequência de vídeo. Os retângulos vermelhos indicam grupos detectados. Os retângu-los amarelos indicam que um grupo ainda não superou o limiar de
persistência temporal Vper.
4 Resultados
Para avaliar o desempenho do método D383S e dos métodos presentes na literatura, foram utilizados os valores de acurácia de cada método. Os resultados são considerados corretos para os valores verdadeiros positivos e verdadeiros negativos, pois existem ví-deos na base de teste que não contêm nenhum quadro com fumaça e vídeos em que todos os quadros há presença de fumaça.
A base de dados utilizada no primeiro experi-mento é formada por 10 vídeos em 8 resoluções dife-rentes, sendo que cada vídeo contém 10 quadros por segundo e um total de 10 segundos de duração, tota-lizando assim 100 quadros por vídeo. A base de da-dos contém 5 vídeos que não contêm fumaça em ne-nhum dos quadros e outros 5 vídeos contendo fuma-ça em todos os seus quadros (Figura 9).
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3942

Já o segundo experimento utilizou uma base de dados de 13 vídeos com resolução de 320 x 240 pixels (Figura 10). Neste experimento foram compa-rados o método D383S e o Algoritmo 3 (Toreyin et. al. 2005), pois a base de dados do segundo experi-mento foi utilizada no trabalho original onde o Algo-ritmo 3 foi desenvolvido, tendo seus autores divulga-do os resultados para esta base de dados, bem como disponibilizado tal base para testes. Além disso, o Algoritmo 3 possui os melhores resultados entre os algoritmos testados. Os vídeos da base de dados es-tão disponíveis em http://brzu.net/05dap.
O método D383S obteve melhor desempenho em todos os testes do Experimento 1. O Algoritmo 3 (Toreyin et. al. 2005) obteve o segundo melhor de-sempenho, seguido do Algoritmos 2 (Chen et. al.
Figura 9. Vídeos de teste para o experimento 1.
2006) modificado e do Algoritmo 1 (Chen et. al. 2006) nesta ordem.
O objetivo principal nos testes foi buscar o nú-mero de verdadeiros positivos (fumaça identificada corretamente como fumaça) maior que falsos negati-vos (fumaça não identificada como fumaça) e falsos positivos (onde não há fumaça mas foi detectada fumaça) em ambos os experimentos. De fato, o valor total de verdadeiros positivos sempre foi maior que a soma de falsos negativos e falsos positivos.
Nos experimentos, o método D383S alcançou uma taxa inferior de falsos positivos quando compa-rado com outros métodos, com taxas de verdadeiros positivos maiores que falsos negativos. Porém, as taxas de verdadeiros positivos não foram tão maiores que a taxa de falsos negativos, devido ao fato de que, ao buscar não encontrar falsos positivos, teremos como consequência uma menor quantidade de qua-dros detectados como fumaça.
A Figura 11 apresenta os resultados comparati-vos dos valores de acurácia de detecção de fumaça para o Experimento 1. Da esquerda para direita a ordem das colunas é: D383S, Algoritmo 1, Algorit-mo 2 e Algoritmo 3.
No primeiro experimento, o método D383S ob-teve melhor desempenho que os algoritmos conven-cionais para a base de dados de vídeos com diferen-tes resoluções e contendo vídeos com e sem a pre-sença de fumaça. A acurácia média de detecção do método D383S proposto, Algoritmo 1, Algoritmo 2 e Algoritmo 3 foram 77,1%, 39,4%, 66,2% e 71,5% respectivamente.
O gráfico da Figura 12 apresenta os valores das taxas de falsos positivos na detecção de fumaça para o método D383S e para os demais algoritmos testa-dos para o Experimento 1.
Os valores médios de taxa de falsos positivos pa-ra o método D383S, Algoritmo 1, Algoritmo 2 e Al-goritmo 3 foram 4,1%, 62,2%, 20% e 7% respecti-vamente.
Figura 10. Vídeos de teste para o experimento 2.
Para o Experimento 2 o algoritmo D383S apre-sentou acurácia de 77.18% contra 74.39% do Algo-ritmo 3, com taxa de falsos positivos de 1,3% para o método D383S contra 2,4% do Algoritmo 3. Vale lembrar que a base de dados do Experimento 2 foi a mesma utilizada no trabalho do Algoritmo 3, sendo portanto sendo uma base que favorece tal algoritmo.
Os resultados obtidos foram estatisticamente significativos de acordo com as hipóteses de pesquisa definidas: H0, o método D383S não obteve melhor desempenho do que os métodos existentes na litera-tura e H1, o método D383S obteve melhor desempe-nho do que os métodos existentes na literatura.
O intervalo de confiança da análise estatística foi de 95%. Esse valor de intervalo de confiança nos garante que se realizarmos o experimento um número suficientemente grande de vezes de acordo com a metodologia descrita para o experimento e utilizando uma base de dados com os mesmos padrões deste trabalho, há pelo menos 95% de chance de encontrar resultado melhor ou igual ao encontrado neste traba-lho.
O valor p encontrado para o Experimento 1 foi p = 0,0001. Isso significa que os dados estão, com fol-
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3943
ga, dentro da área de 95% de confiança da distribui-ção amostral, e que existe 0,01% de probabilidade dos resultados obtidos no primeiro experimento se-rem devidos a fatores que não estão sendo estudados no experimento.
Para o Experimento 2 o valor p foi p = 0,14. Apesar de nos resultados gráficos do Experimento 2 o método proposto apresentar resultados superiores ao do Algoritmo 3, o que a análise estatística diz é que com os dados obtidos com o experimento não é possível garantir com 95% de confiança que o méto-do proposto seja superior ao Algoritmo 3 para a base de dados do Experimento 2. Assim, no Experimento 2, outros fatores além do método e resolução podem ter influenciado os resultados obtidos.
É importante notar também que a base de dados do Experimento 2 não é balanceada com relação ao número de quadros com e sem fumaça, ao contrário do Experimento 1 em que temos uma base de dados com vídeos contendo a mesma quantidade de qua-dros com e sem fumaça.
Os resultados mostram que o método D383S proposto superou os métodos existentes na literatura em todas as resoluções de vídeo testadas. Além dis-so, os resultados mostram que é viável utilizar câme-ras de monitoramento para a detecção de fumaça em áreas remotas de preservação ambiental.
5 Conclusão
Neste trabalho foi desenvolvido um sistema de detecção de fumaça visando antecipar sistemas de detecção de fogo utilizando processamento de ima-gens. Este tipo de sistema auxilia na prevenção de incêndios, os quais são a principal causa de desma-tamento natural em todo o mundo. A autonomia do sistema permite que o mesmo monitore florestas em pontos chave e de difícil acesso, bem como a redução de recursos humanos em vigilância. Mas a interven-ção humana nas tarefas de vigilância será sempre necessária para casos em que o sistema detecte falsos positivos.
Dos testes realizados com o sistema, conclui-se que ele tem um desempenho robusto com baixo per-centual de falsos positivos. Um ponto importante é que o sistema atingiu baixas ocorrências de falsos negativos, ou seja, quando há existência de fumaça em um quadro e essa fumaça não é detectada pelo sistema.
Com relação aos falsos positivos, eles ocorreram em vídeos contendo imagens de neblina, galhos con-gelados se movimentando e até mesmo de um vídeo em que o reflexo de um barco de cor branca na água simula cor e movimento de fumaça. Entretanto, se os parâmetros forem ajustados para não detectar tais falsos positivos, não haverá detecção de fumaça em quadros que realmente contenham fumaça.
O falso positivo pode ser verificado com auxílio do ser humano. Já o falso negativo é mais grave, pois existe a fumaça em um determinado ambiente e ela não está sendo detectada, gerando riscos graves e tornando o sistema proposto ineficiente.
A utilização de uma base de dados de controle, ou seja, de vídeos que não contêm imagens de fuma-ça mas possuem situações similares a fumaça, testou o sistema em situações difíceis. Entretanto, a maioria dos trabalhos abordados na revisão de literatura, com exceção de Toreyin et. al. (2005), não mostram testes realizados com vídeos ou imagens de controle.
Além de obter os melhores resultados, a técnica de subtração de fundo utilizada neste trabalho tam-bém foi a técnica que utilizou menor custo computa-cional, segmentando regiões em movimento com rapidez e precisão.
A segunda parte do algoritmo também teve um diferencial de qualidade, o qual consiste na diminui-ção da a região de busca para comparação de cor. A
utilização de um limiar que se ajusta melhor aos pixels de fumaça no espaço de cor RGB contribuiu para a melhoria do algoritmo reduzindo falsos positi-vos, já que a área de comparação de cores é a área onde os pixels com cor de fumaça efetivamente se encontram.
Finalmente, a terceira parte do algoritmo contri-bui para redução de falsos positivos ao verificar o tempo de permanência dos objetos candidatos a fu-maça na imagem, bem como o movimento de tais objetos. Definindo um limiar de tempo, faz-se com que, para que um objeto seja classificado como fu-maça, ele deva permanecer por um período mínimo de tempo na imagem. Eliminam-se, assim, objetos que desapareçam ou que se movam rapidamente na cena.
Existem ainda possibilidades a serem exploradas em trabalhos futuros tais como: análise de desempe-nho de novos classificadores de padrões, como as máquinas de comitê, que empregam a estratégia de combinar as respostas de vários classificadores espe-cialistas, em uma resposta única; e analisar o desem-penho desses novos classificadores associados aos diversos tipos de espaços de cores existentes.
Agradecimentos O presente trabalho foi feito com apoio financei-
ro da CEMIG, ANEEL, CAPES, CNPq e FAPEMIG.
Referências Bibliográficas Calderara, S., Piccinini, P., and Cucchiara, R. (2011). Vision
based smoke detection system using image energy and color in-formation. Mach. Vision Appl., 22(4):705–719.
Chen, T.-H., Yin, Y.-H., and Shi-Feng Huang, Y.-T.Y. (2006). The smoke detection for early firealarming system base on video processing. In Intelligent Information Hiding and Multime-dia Signal Processing, 2006. IIH-MSP ’06. International Confe-rence on, pages 427–430.
Collins, R. T., Lipton, A. J., Kanade, T., Fujiyoshi, H., Dug-gins, D., Tsin, Y., Tolliver, D., Enomoto, N., Hasegawa, O., and Peter Burt, L.W. (2000). A system for video surveillance and monitoring.
Cormen, T. H., Leiserson, C. E., Rivest, R. L., and Stein, C. (2002). Algoritmos, Teoria e Prática. Elsevier, 6 edition.
Damir, K., Darko, S., and Toni, J. (2009). Histogram-based smoke segmentation in forest fire detection system. Information Technology and Control, 38(3).
Dedeoglu, Y. (2004). Moving object detection, tracking and classification for smart video surveillance. PhD thesis, Bilkent University, Turkey.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3944

Donohoe, G., Hush, D., and Ahmed, N. (1988). Change de-tection for target detection and classification in video sequences. In Proceeding of ICASSP, pages 1084–1087.
Dorigo, M. (1999). Ant colony optimization: A new meta-heuristic. In Proceedings of the Congress on Evolutionary Compu-tation, pages 1470–1477. IEEE Press.
Çelik, T., Demirel, H., Ozkaramanli, H., and Uyguroglu, M. (2007). Fire detection using statistical color model in video se-quences. J. Vis. Comun. Image Represent., 18(2):176–185.
Ferreira, M. A. L. (2007). Detecção de movimento através de subtração de fundo para vigilância eletrônica automática. PhD thesis, Pontifícia Universidade Católica do Rio de Janeiro.
Friedlander, S. K. (2000). Smoke, dust, and haze: fundamen-tals of aerosol dynamics, 2nd Ed. Topics in chemical engineering. Oxford University Press, New York.
Kopilovic, I., V´agvolgyi, B., and Sziranyi, T. (2000). Appli-cation of panoramic annular lens for motion analysis tasks: Sur-veillance and smoke detection. In ICPR, pages 4714–4717.
MacQueen, J. B. (1967). Some methods for classification and analysis of multivariate observations. In Proc. of the fifth Berkeley Symposium on Mathematical Statistics and Probability, volume 1, pages 281–297. University of California Press.
Piccardi, M. (2004). Background subtraction techniques: a review. In 2004 IEEE International Conference on Systems, Man and Cybernetics, volume 4, pages 3099–3104.
Toreyin, B. U., Dedeoglu, Y., and U. Gudukbay, A. E. e. (2005). Contour based smoke detection in video using wavelets. Pattern Recognition Letters.
Toreyin, B. U., Dedeoglu, Y., and U. Gudukbay, A. E. e. (2006). Computer vision based method for real-time fire and flame detection. pattern recognition letters.
Tung, T. X. and Kim, J. M. (2011). An effective four-stage smoke-detection algorithm using video images for early fire-alarm systems. Fire Safety Journal, 46(5):276 – 282.
Vicente, J., Guillemant, P. (2002) An image processing tech-nique for automatically detecting forest fire. International Journal of Thermal Sciences, 41: 1113-1120.
Guillemant, Philippe and Vicente, Jerome (2001). Real-time identification of smoke images by clustering motions on a fractal curve with a temporal embedding method. Optical Engineering. 40(4) 554-563.
Yuan, F. (2008). A fast accumulative motion orientation mo-del based on integral image for video smoke detection. Pattern Recognition Letters, 29(7):925 – 932.
Yuan, F. (2012). A double mapping framework for extrac-tion of shape-invariant features based on multi-scale partitions with adaboost for video smoke detection. Pattern Recognition, 45(12):4326-4336.
Figura 11. Acurácia para os vídeos do Experimento 1.
Figura 12. Taxas de falsos positivos para o Experimento 1.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
3945