discretization of bayesian inverse problems, part ii · discretization of bayesian inverse...
TRANSCRIPT

Discretization of Bayesian inverse problems, part II
Samuli Siltanen Department of Mathematics and Statistics University of Helsinki MCMC Seminar, October 20, 2009.

Nuutti Hyvönen Seppo Järvenpää Jari Kaipio Martti Kalke Petri Koistinen Ville Kolehmainen Matti Lassas Jan Moberg Kati Niinimäki Juha Pirttilä Maaria Rantala Eero Saksman Erkki Somersalo Antti Vanne Simopekka Vänskä
This is a joint work with

1. X-rays and the inverse problem of tomography
2. Low-dose imaging using Bayesian inversion
3. Limited-angle dental X-ray tomography
5. Besov space priors and wavelets
4. Discretization-invariance
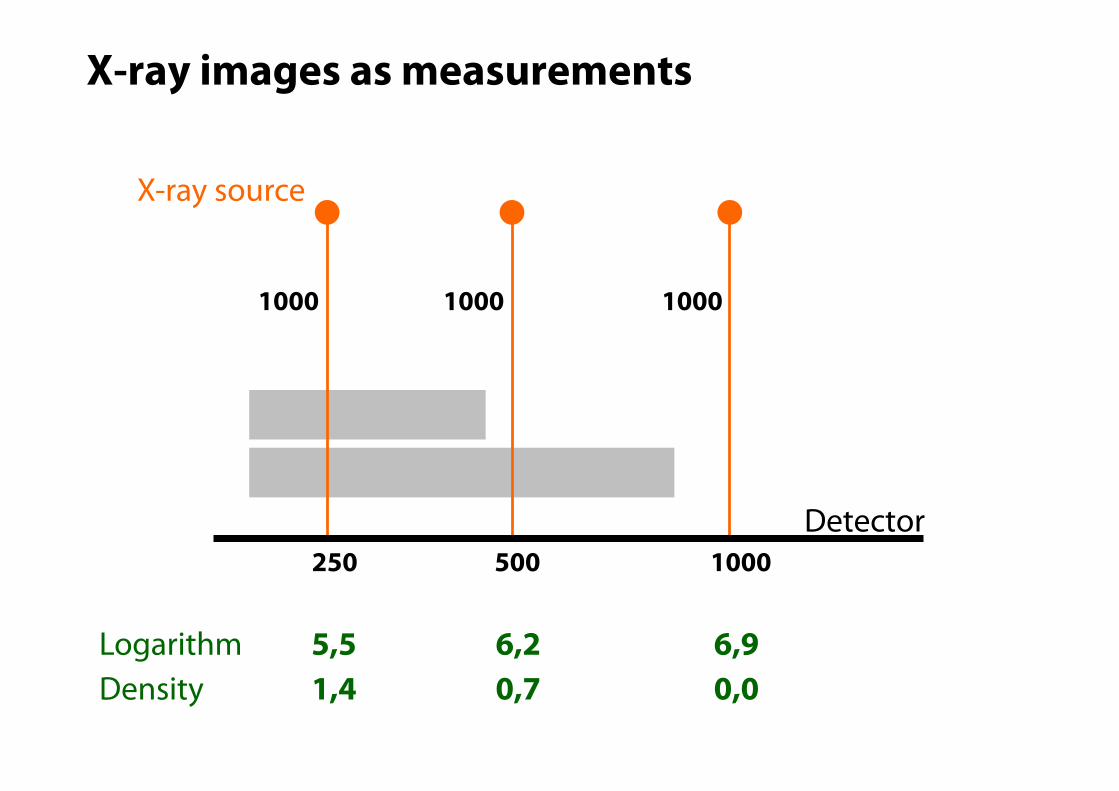
X-ray images as measurements
Detector
1000
1000
1000 1000
500 250
X-ray source
Logarithm 5,5 6,2 6,9 Density 1,4 0,7 0,0
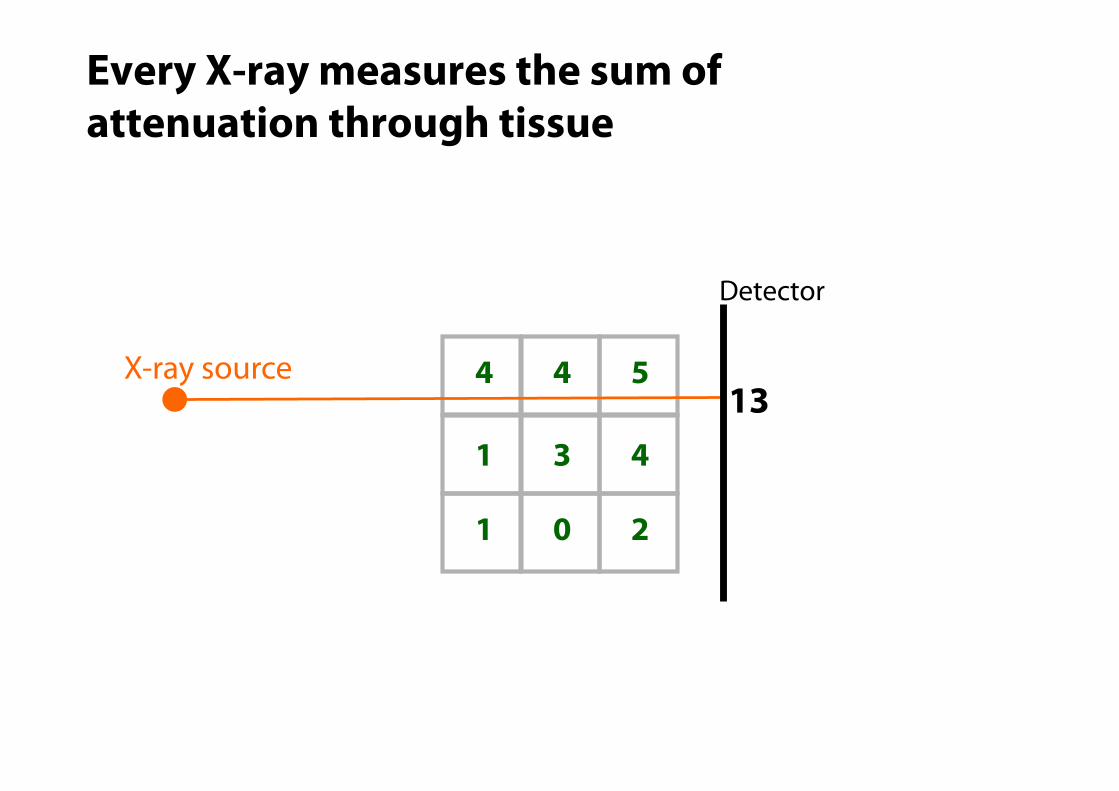
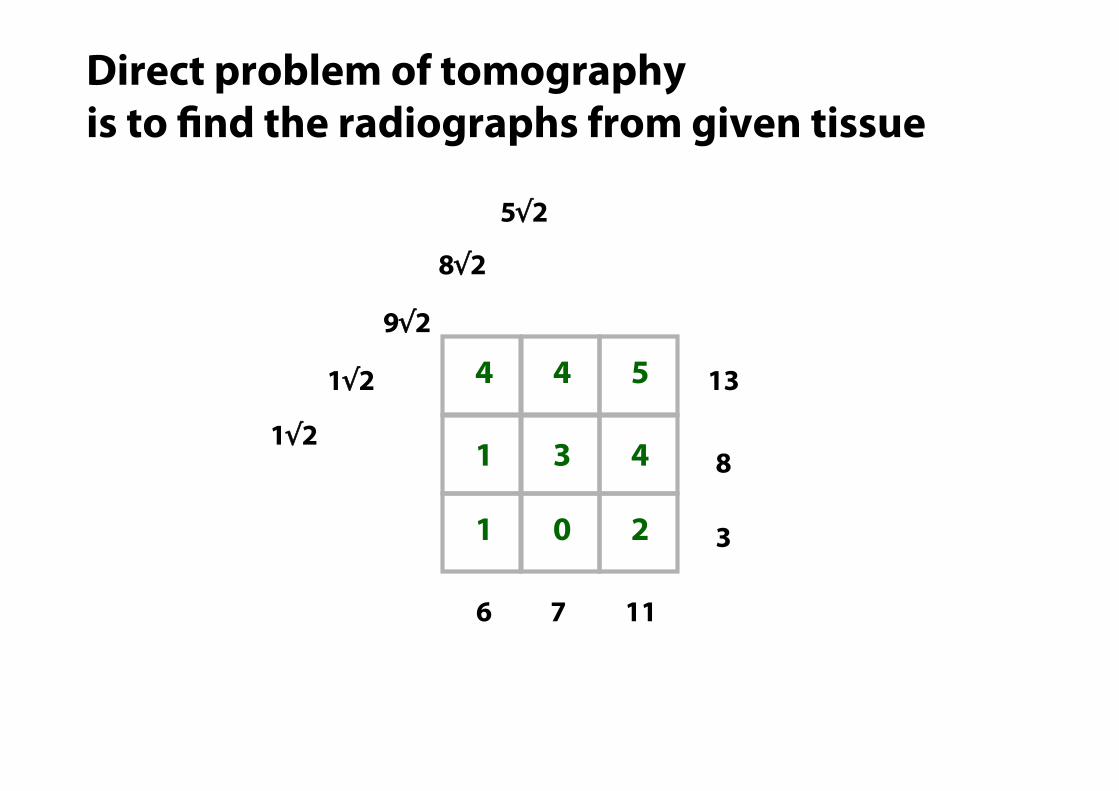
4 4 5
1 3 4
1 0 2
13 X-ray source
Detector
Every X-ray measures the sum of attenuation through tissue
4 4 5
1 3 4
1 0 2
11 7 6
13
8
3
9√2
8√2
1√2
1√2
5√2
Direct problem of tomography is to !nd the radiographs from given tissue
11 7 6
13
8
3
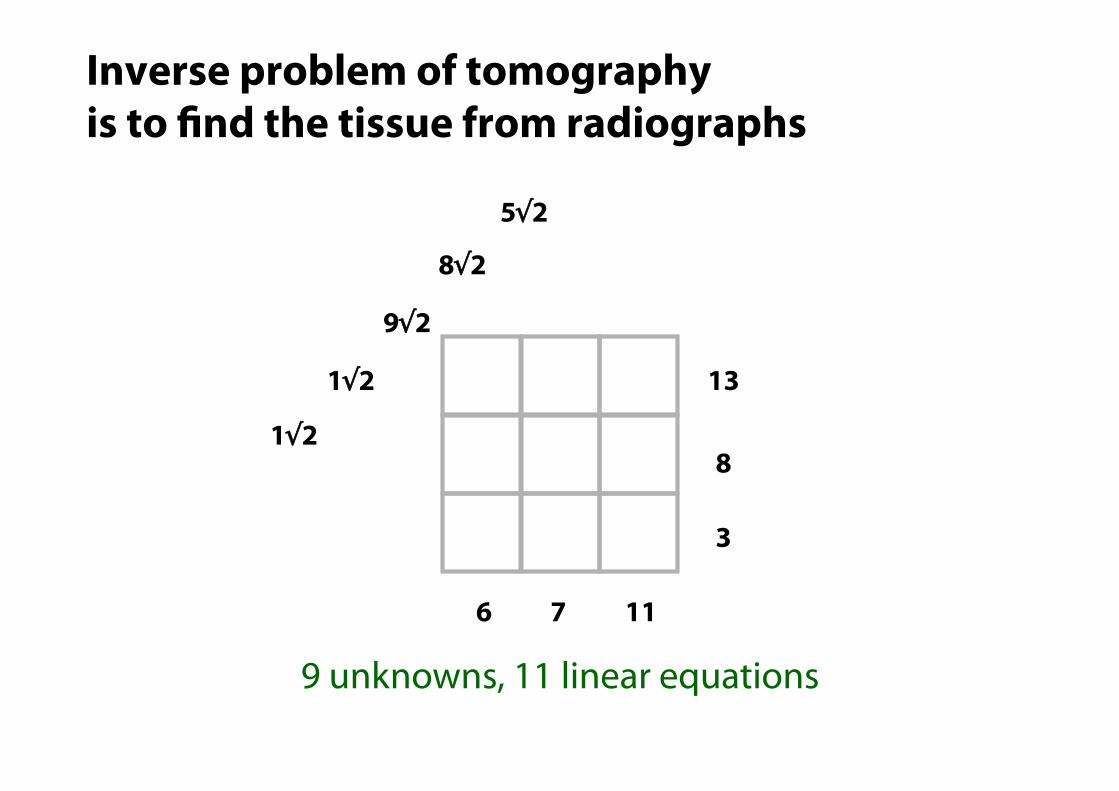
Inverse problem of tomography is to !nd the tissue from radiographs
9 unknowns, 11 linear equations
9√2
8√2
1√2
1√2
5√2
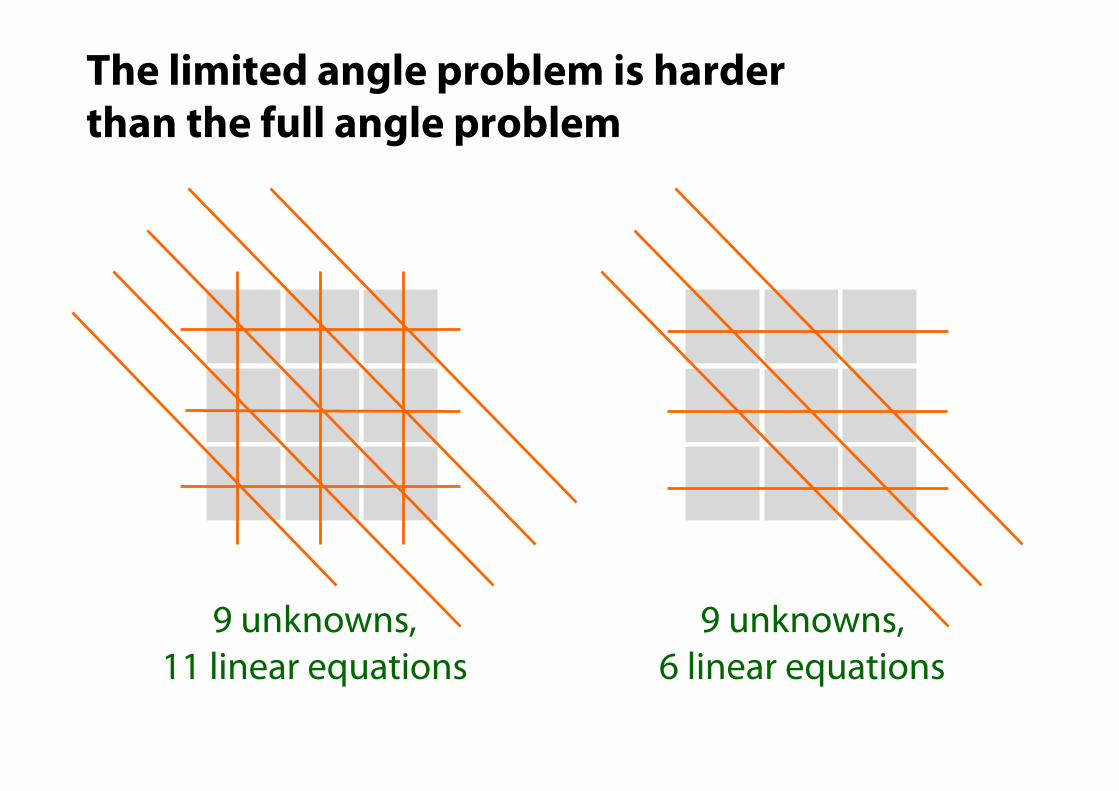
9 unknowns, 11 linear equations
9 unknowns, 6 linear equations
The limited angle problem is harder than the full angle problem
13
8
3
9√2
8√2
1√2 4 4 5
1 3 4
1 0 2
5 6 2
1 5 2
4 0 -1
9 1 3
1 0 7
3 0 0
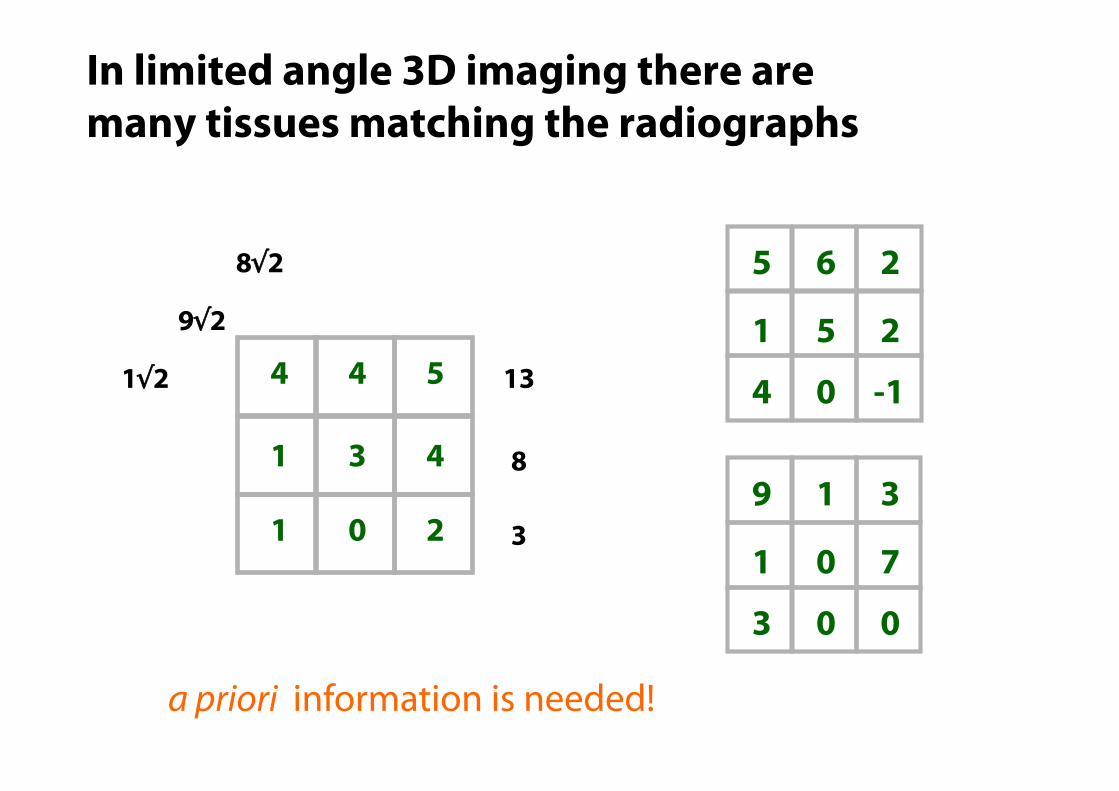
a priori information is needed!
In limited angle 3D imaging there are many tissues matching the radiographs
1. X-rays and the inverse problem of tomography
2. Low-dose imaging using Bayesian inversion
3. Limited-angle dental X-ray tomography
5. Besov space priors and wavelets
4. Discretization-invariance
A series of projects started in 2001 aiming for a new type of low-dose 3D imaging
The goal was a mathematical algorithm with Input: small number of digital X-ray images taken with any X-ray device Output: three-dimensional reconstruction with quality good enough for the clinical task at hand
Products of Instrumentarium Imaging in 2001:
Academic members: Inverse problems research groups in University of Helsinki, University of Kuopio, Helsinki University of Technology and Tampere University of Technology
Industrial members: 2001-2002 Instrumentarium Imaging and Invers Ltd 2003-2004 GE Healthcare Finland 2005-2007 PaloDEx Group
Funding by TEKES and the companies.
Outcome: 12 peer-reviewed articles, 3 patents, algorithms for 3 commercial products
Essential history of the three projects:
~
m4
m5
m6
m2
m3
m1 x1 x4 x7
x2 x5 x8
x3 x6 x9
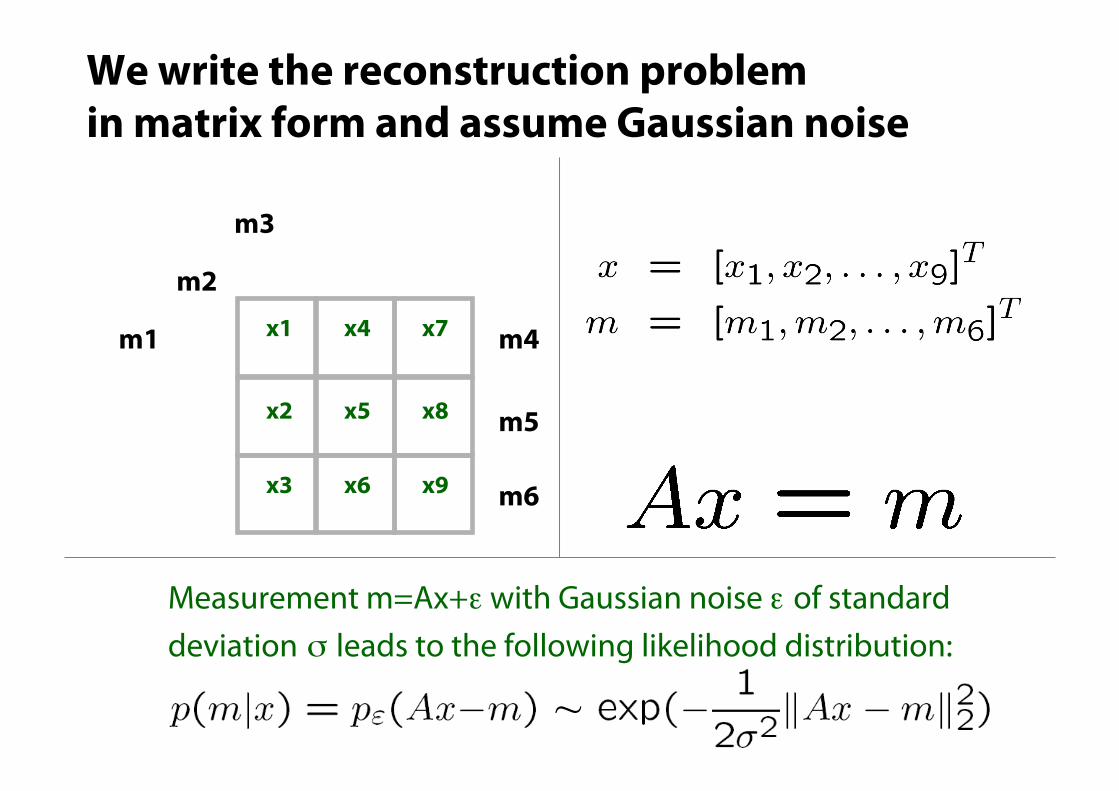
We write the reconstruction problem in matrix form and assume Gaussian noise
Measurement m=Ax+ε with Gaussian noise ε of standard deviation σ leads to the following likelihood distribution:
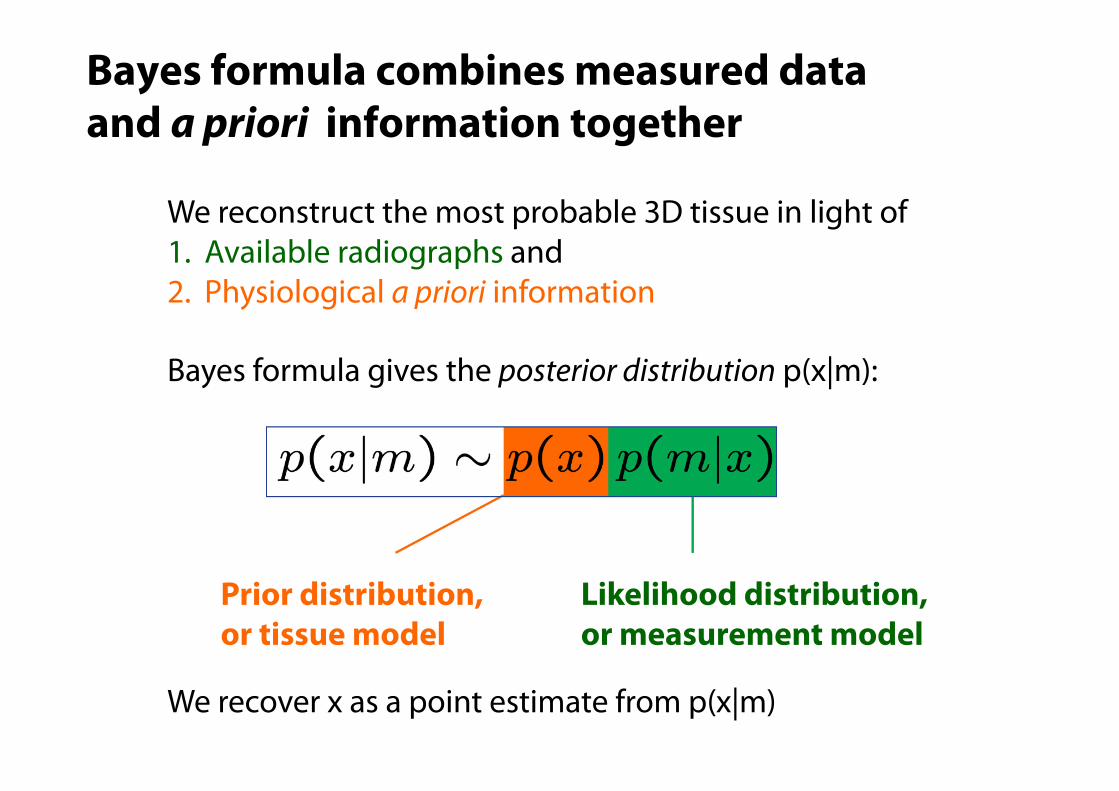
Bayes formula combines measured data and a priori information together
We reconstruct the most probable 3D tissue in light of 1. Available radiographs and 2. Physiological a priori information
Bayes formula gives the posterior distribution p(x|m):
We recover x as a point estimate from p(x|m)
Prior distribution, or tissue model
Likelihood distribution, or measurement model
Algorithms can be tailored to any measurement geometry.
Naturally modular software: measurement model (likelihood) and tissue model (prior) can be designed independently.
Estimating x leads to large-scale optimization or to integration in high-dimensional space:
Bayesian inversion algorithms are "exible and widely applicable
1. X-rays and the inverse problem of tomography
2. Low-dose imaging using Bayesian inversion
3. Limited-angle dental X-ray tomography
5. Besov space priors and wavelets
4. Discretization-invariance
1. Attenuation coefficient is non-negative (X-radiation does not intensify inside tissue).
2. Different tissue types (bone, gum, pulp chamber) are approximately homogeneous.
3. There are clear boundaries between tissues.
Three kinds of a priori information are readily available in dental 3D imaging
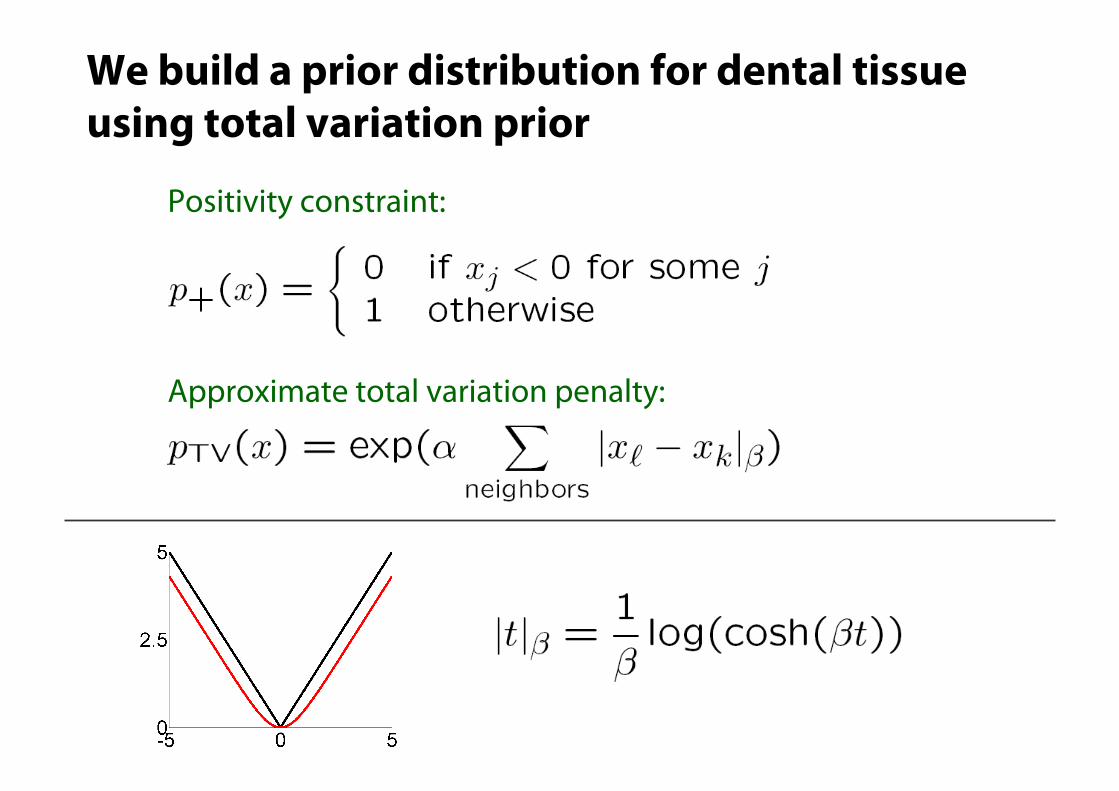
We build a prior distribution for dental tissue using total variation prior
Positivity constraint:
Approximate total variation penalty:
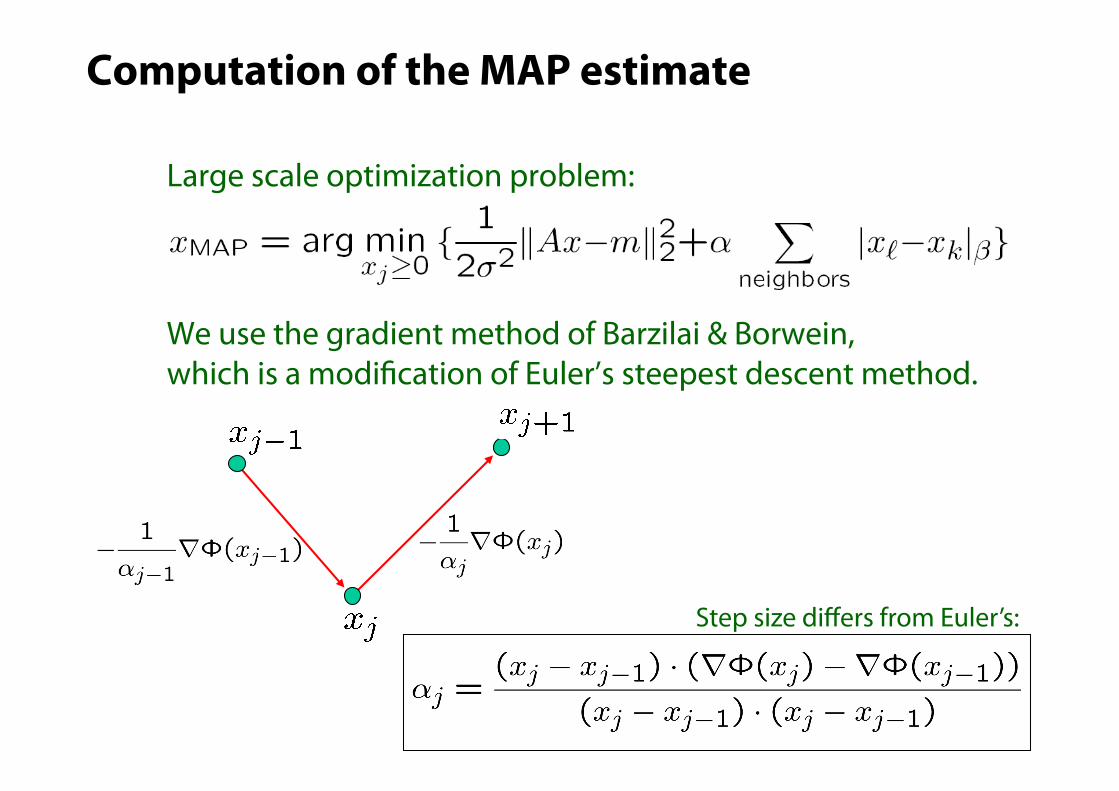
Computation of the MAP estimate
Large scale optimization problem:
We use the gradient method of Barzilai & Borwein, which is a modi#cation of Euler’s steepest descent method.
Step size differs from Euler’s:
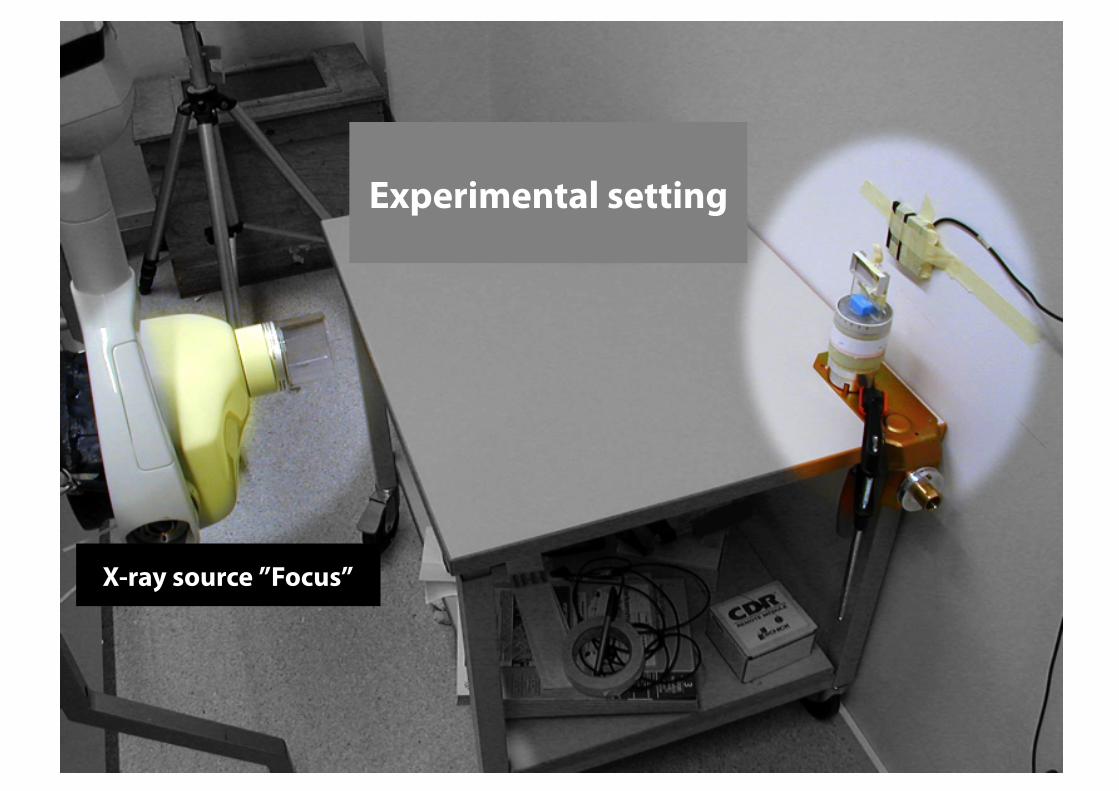
Experimental setting
X-ray source ”Focus”
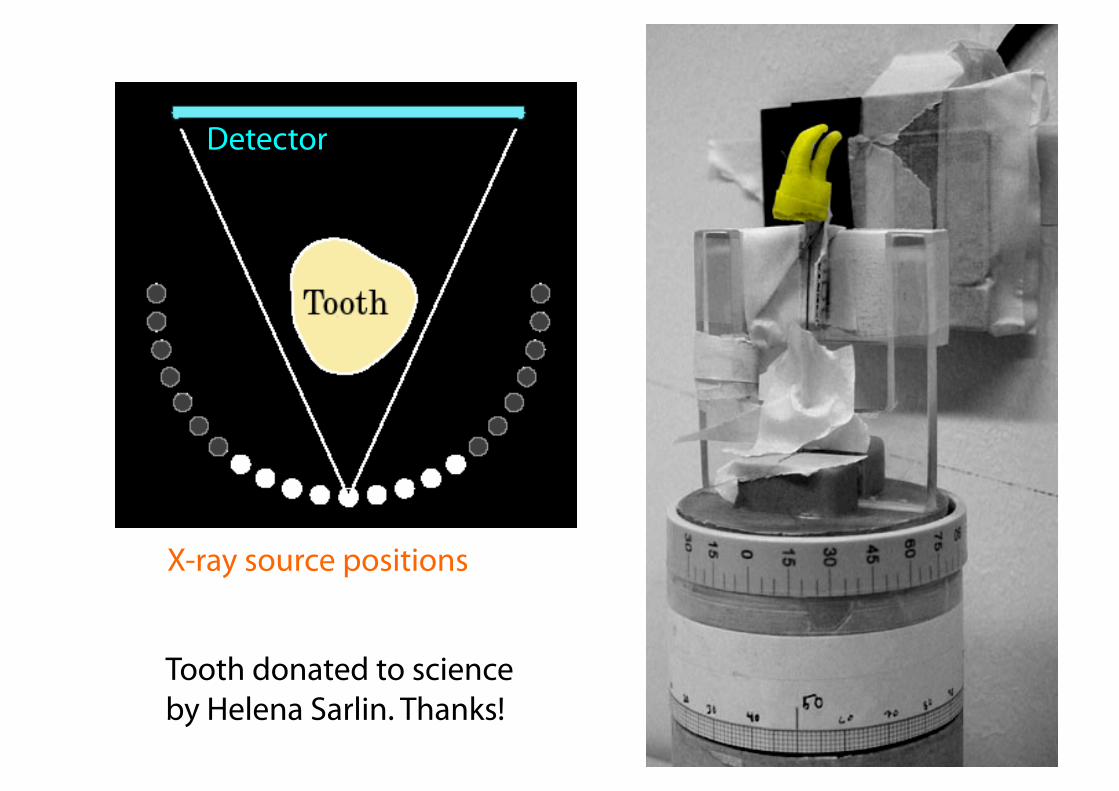
Detector
X-ray source positions
Tooth donated to science by Helena Sarlin. Thanks!

The projection images look like this
0 30 60 90
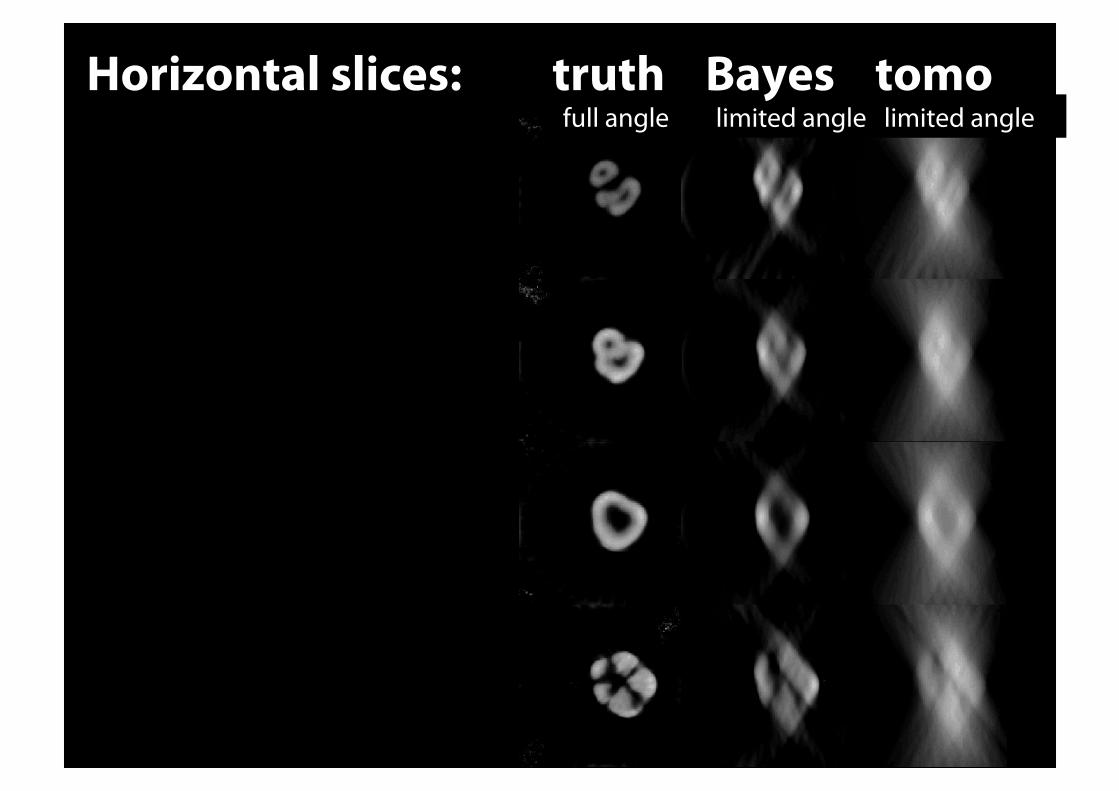
full angle limited angle limited angle Horizontal slices: truth Bayes tomo
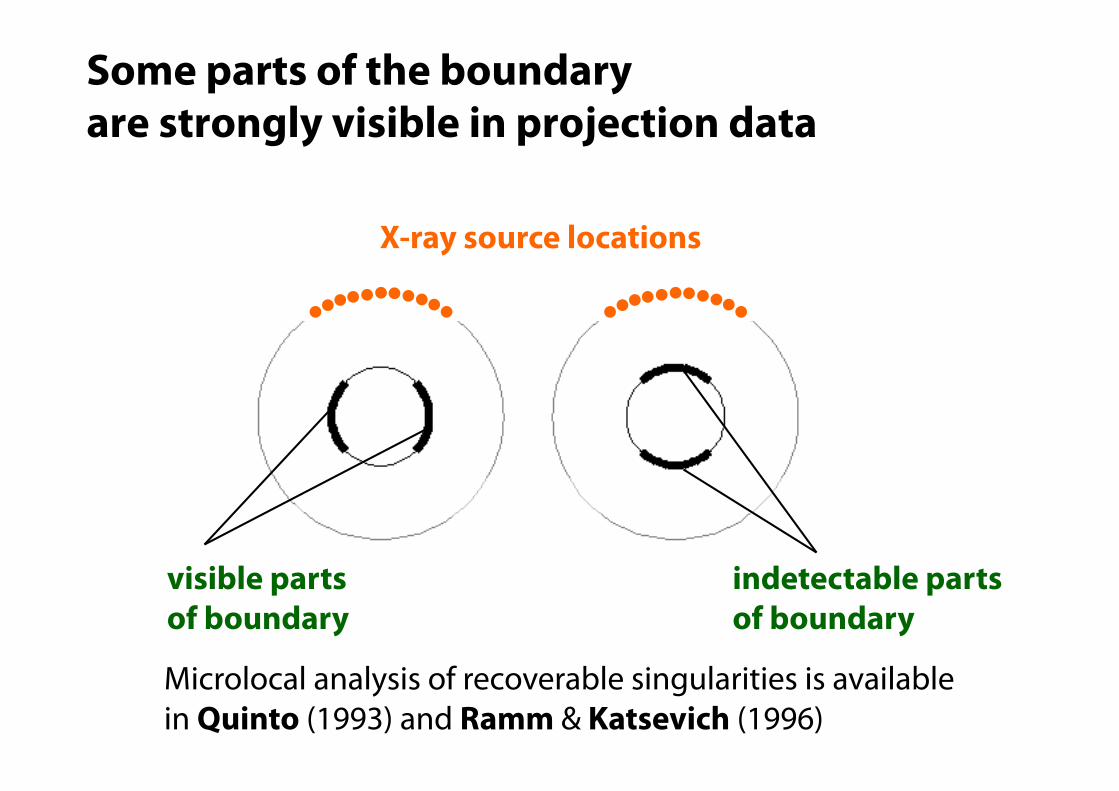
Some parts of the boundary are strongly visible in projection data
visible parts of boundary
indetectable parts of boundary
X-ray source locations
Microlocal analysis of recoverable singularities is available in Quinto (1993) and Ramm & Katsevich (1996)

full angle limited angle limited angle Vertical slices: truth Bayes tomo
Kolehmainen, S, Järvenpää, Kaipio, Koistinen, Lassas, Pirttilä, Somersalo (2003)

MAP Conditional mean (MCMC)
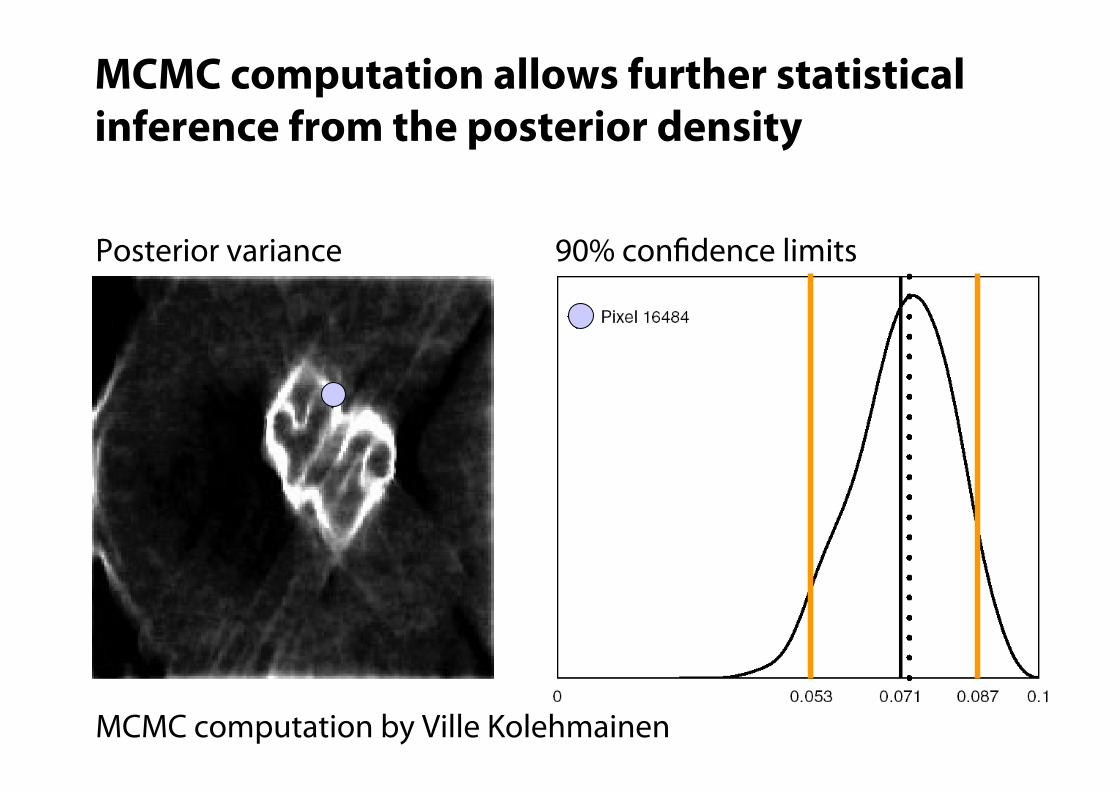
MCMC computation allows further statistical inference from the posterior density
Posterior variance 90% con#dence limits
MCMC computation by Ville Kolehmainen
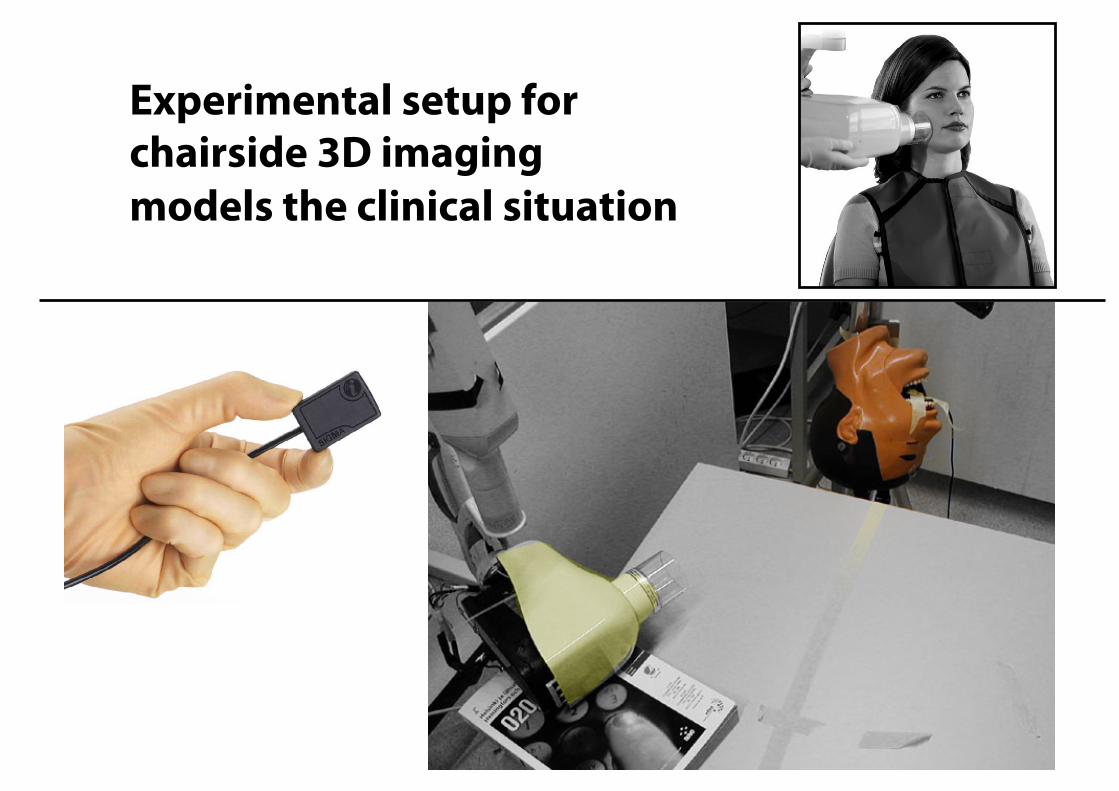
Experimental setup for chairside 3D imaging models the clinical situation
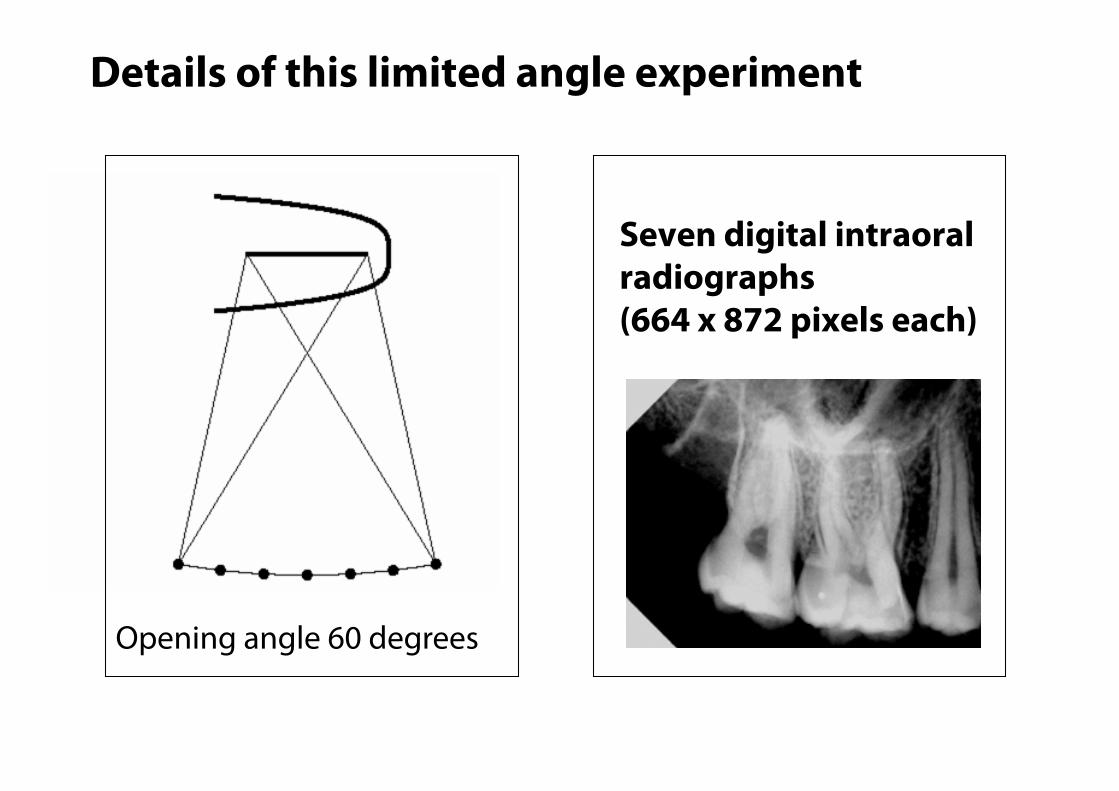
Details of this limited angle experiment
Seven digital intraoral radiographs (664 x 872 pixels each)
Opening angle 60 degrees
The dimension of the search space is very high in this practical situation
42,496,000 unknowns 4,053,056 linear equations We divide the problem into two-dimensional subproblems and use the gradient-based minimization method of Barzilai and Borwein.
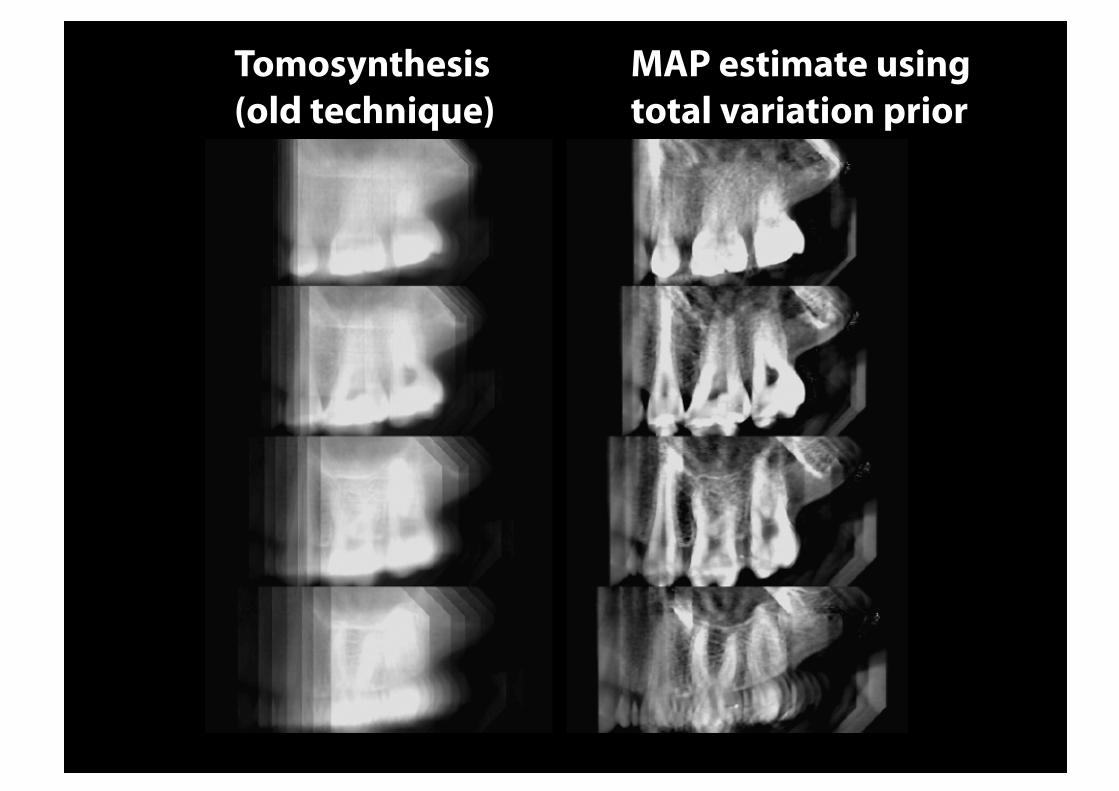
Tomosynthesis MAP estimate using (old technique) total variation prior
1. X-rays and the inverse problem of tomography
2. Low-dose imaging using Bayesian inversion
3. Limited-angle dental X-ray tomography
5. Besov space priors and wavelets
4. Discretization-invariance
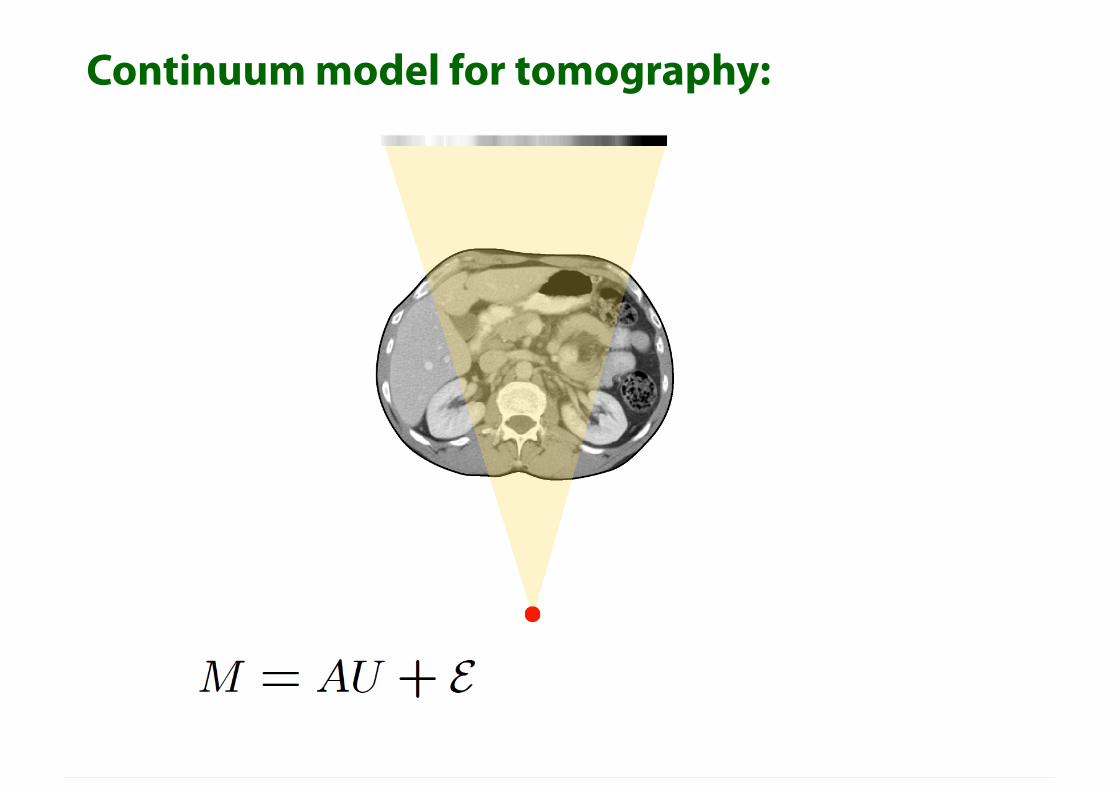
Continuum model for tomography:
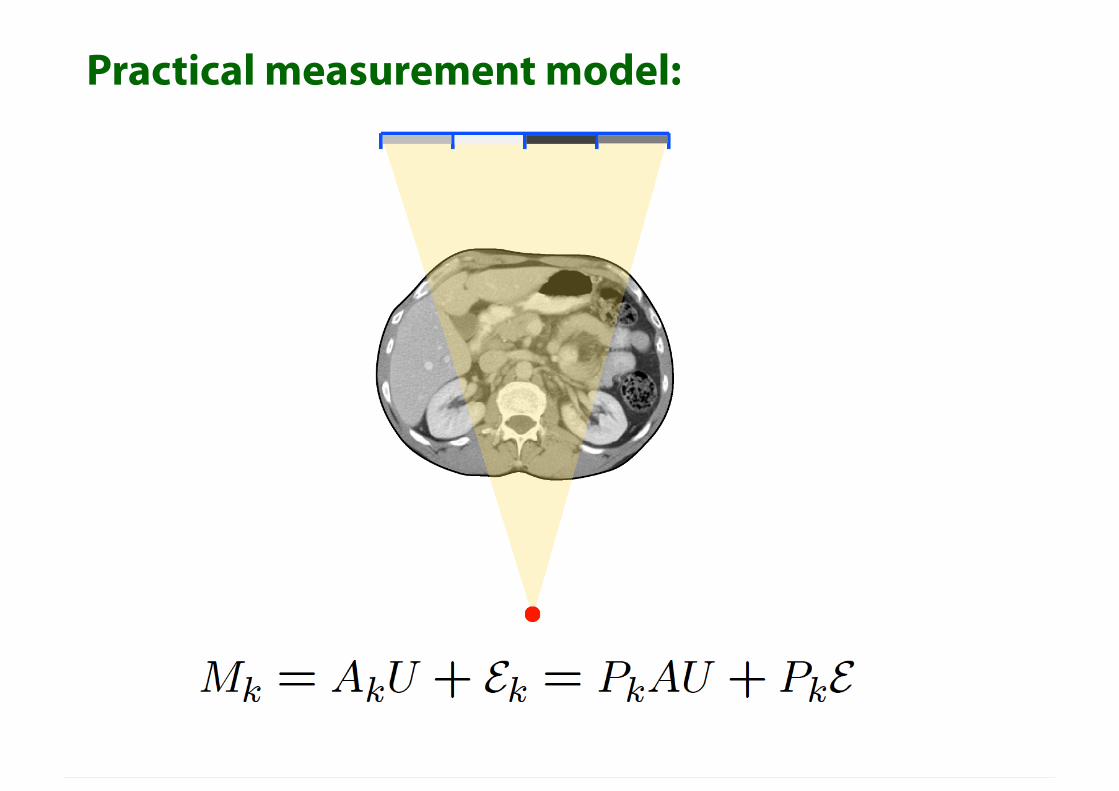
Practical measurement model:
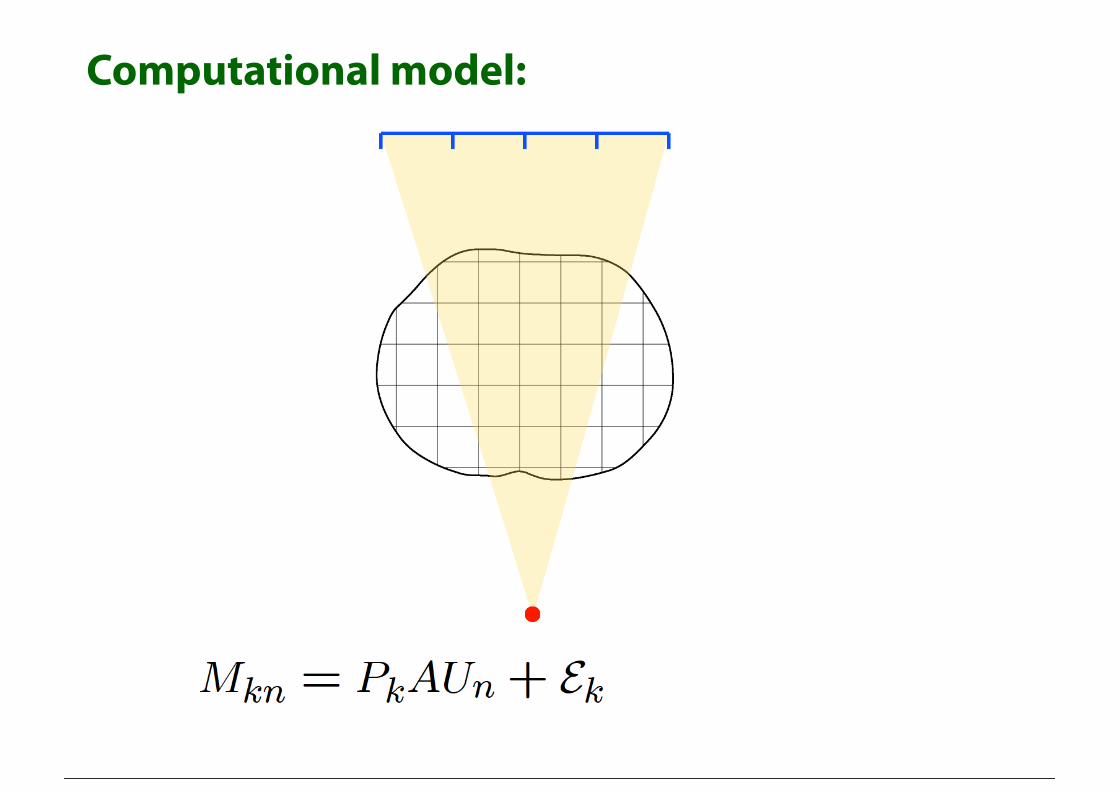
Computational model:
There are two independent projections involved in the models

k=8
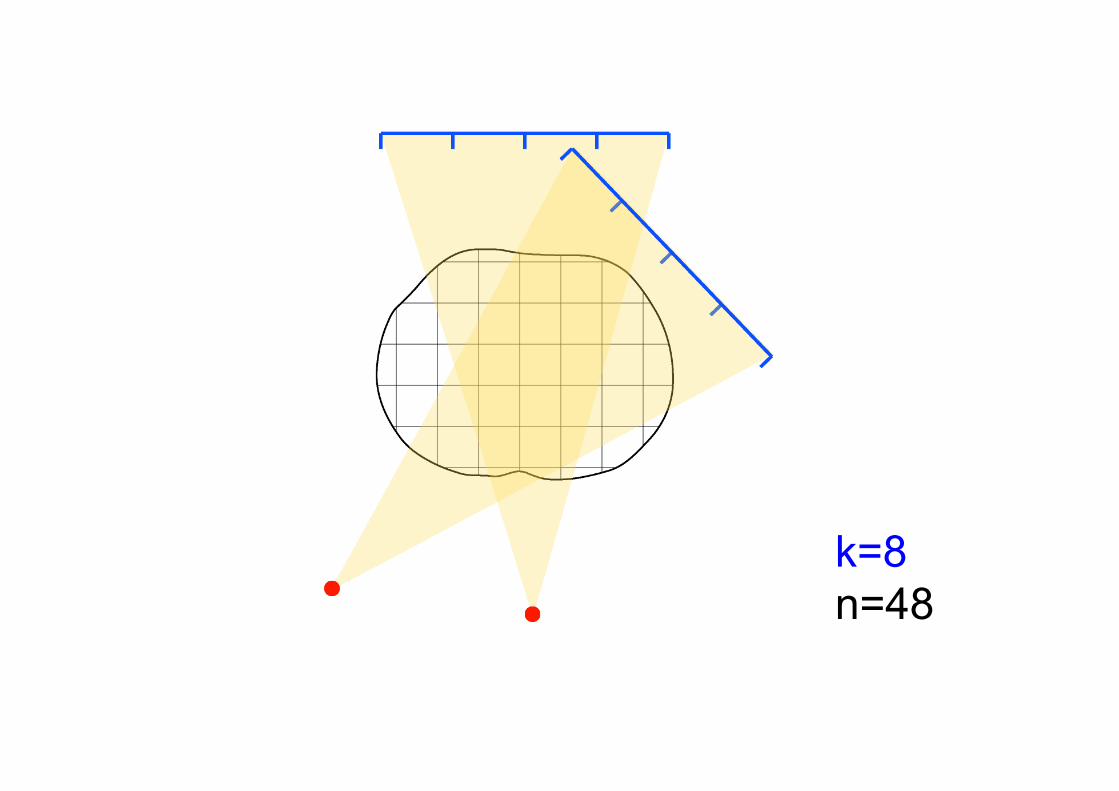
k=8 n=48
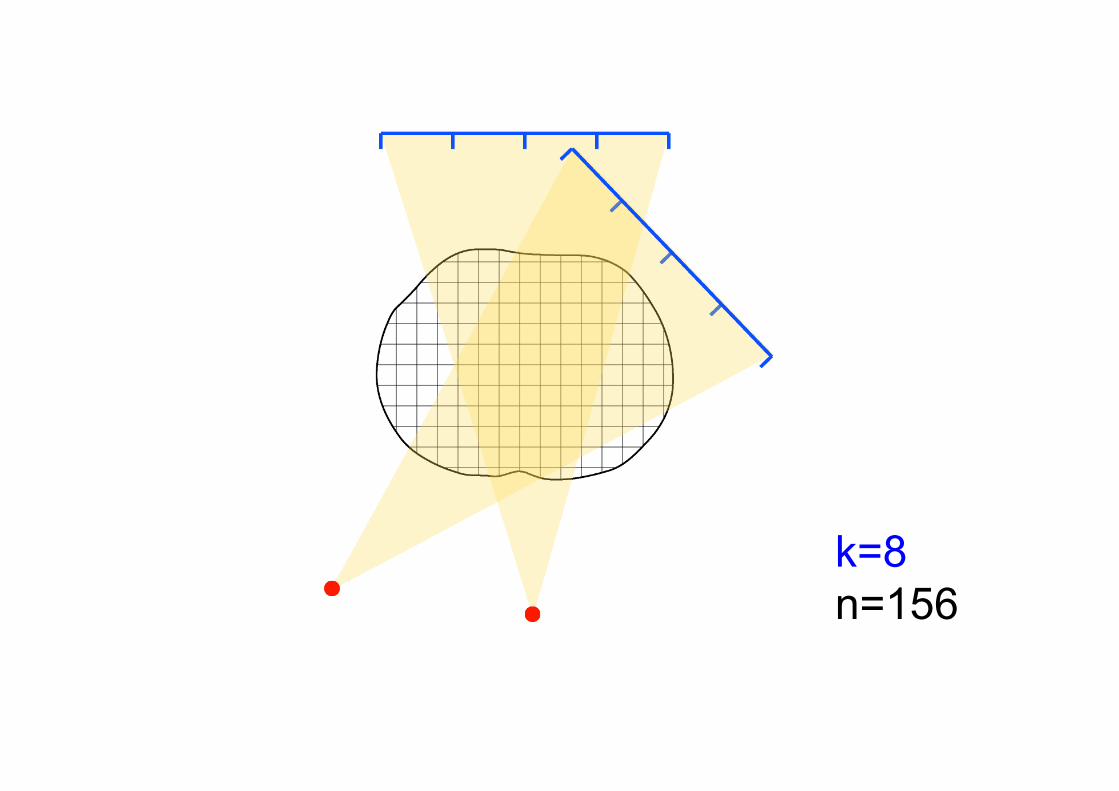
k=8 n=156

k=8 n=440
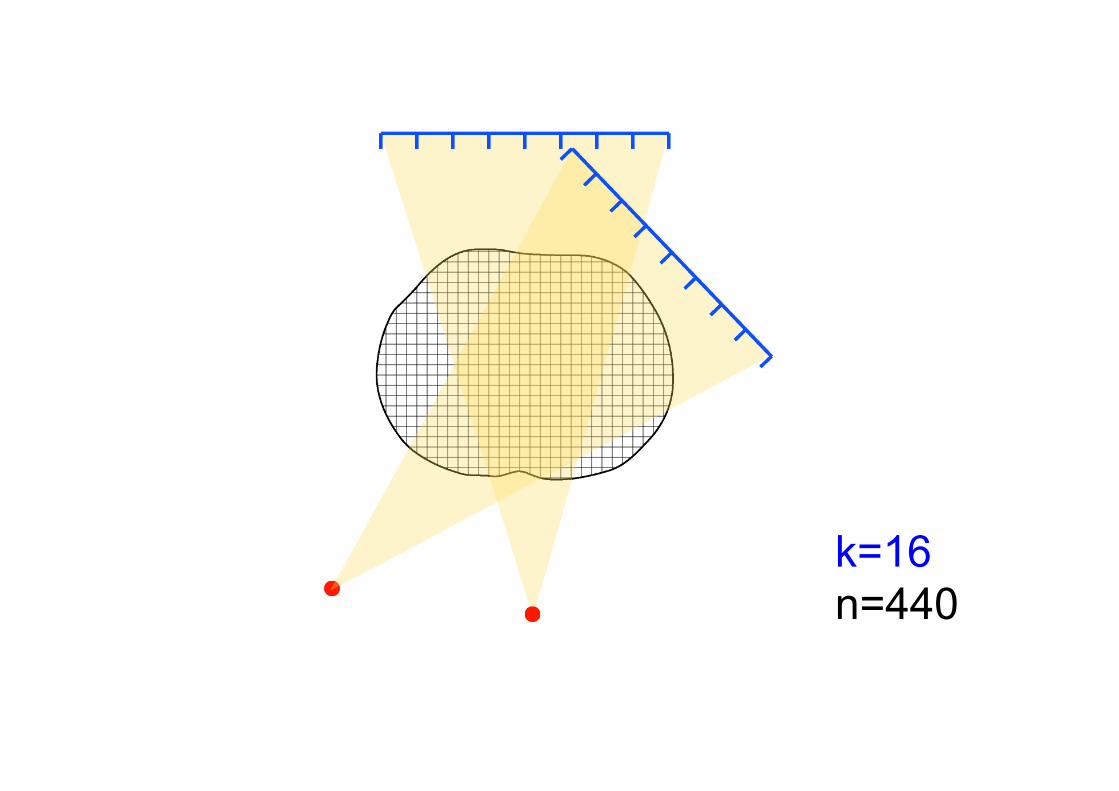
k=16 n=440
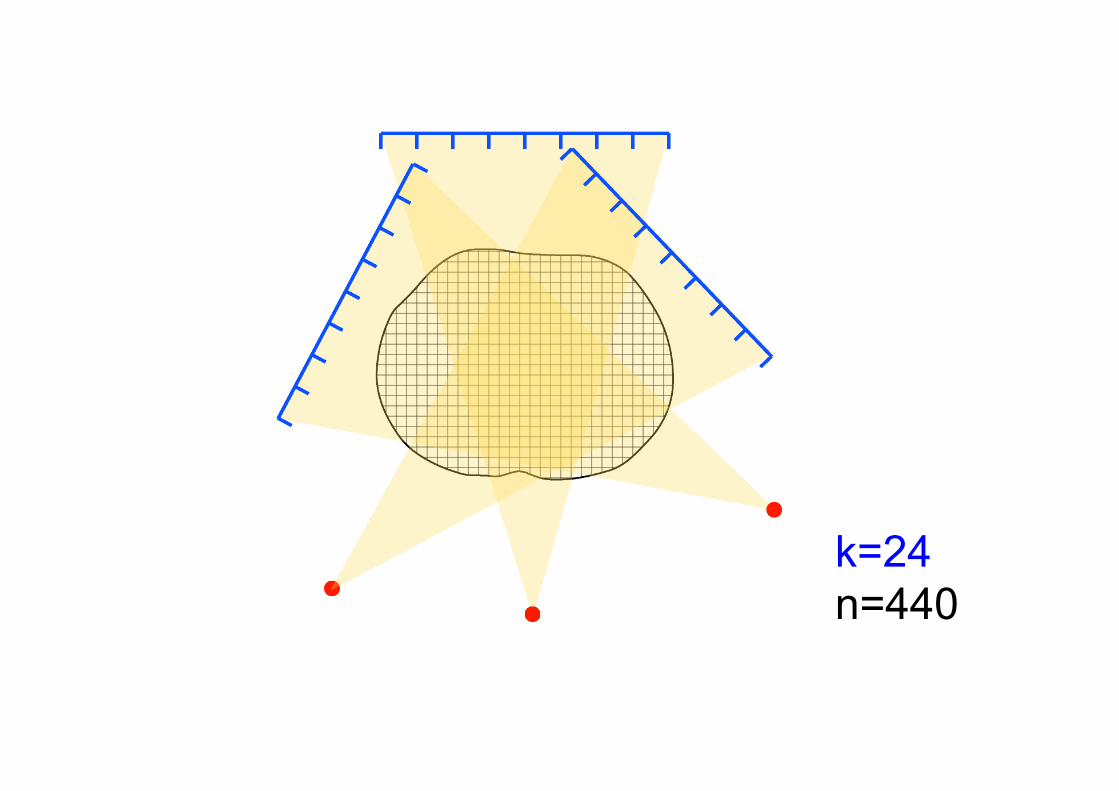
k=24 n=440

This is the central idea of studying discretization-invariance:
The numbers n and k are independent.
For the Bayesian inversion strategy to work, posterior estimates must converge as n or k or both tend to in!nity.


We arrived at these results suggesting that Besov space priors are the way to go
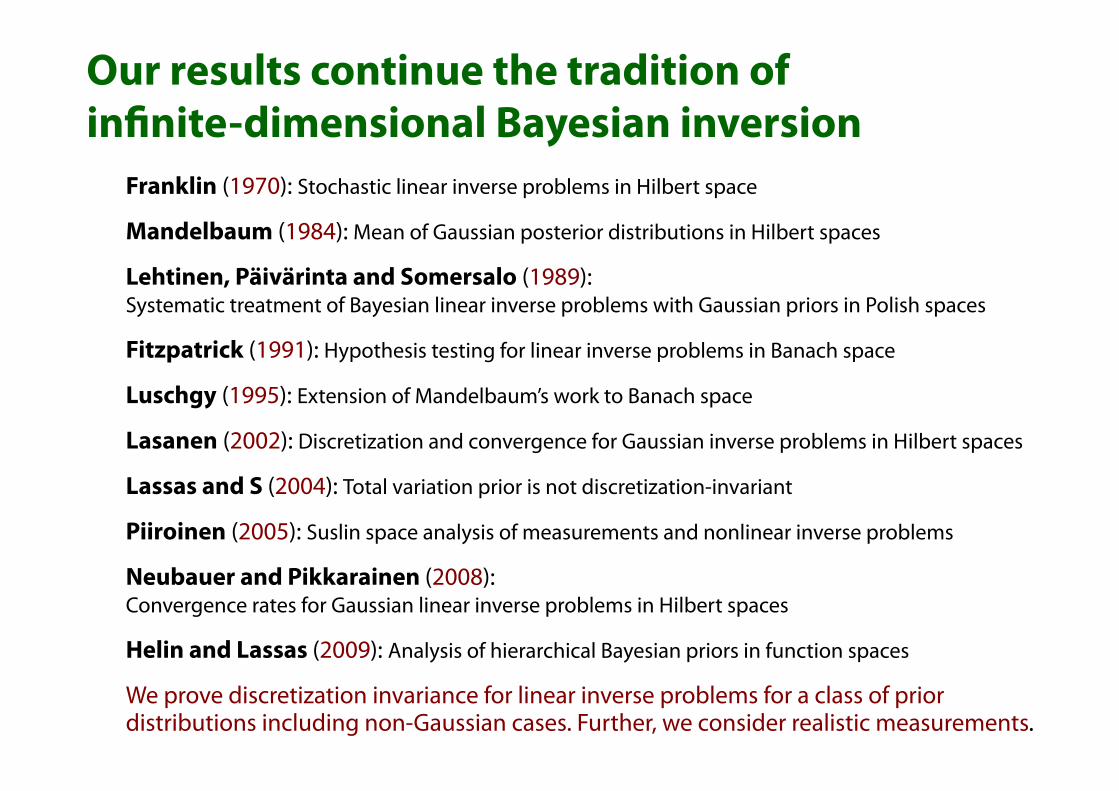
Our results continue the tradition of in!nite-dimensional Bayesian inversion
Franklin (1970): Stochastic linear inverse problems in Hilbert space
Mandelbaum (1984): Mean of Gaussian posterior distributions in Hilbert spaces
Lehtinen, Päivärinta and Somersalo (1989): Systematic treatment of Bayesian linear inverse problems with Gaussian priors in Polish spaces
Fitzpatrick (1991): Hypothesis testing for linear inverse problems in Banach space
Luschgy (1995): Extension of Mandelbaum’s work to Banach space
Lasanen (2002): Discretization and convergence for Gaussian inverse problems in Hilbert spaces
Lassas and S (2004): Total variation prior is not discretization-invariant
Piiroinen (2005): Suslin space analysis of measurements and nonlinear inverse problems
Neubauer and Pikkarainen (2008): Convergence rates for Gaussian linear inverse problems in Hilbert spaces
Helin and Lassas (2009): Analysis of hierarchical Bayesian priors in function spaces
We prove discretization invariance for linear inverse problems for a class of prior distributions including non-Gaussian cases. Further, we consider realistic measurements.
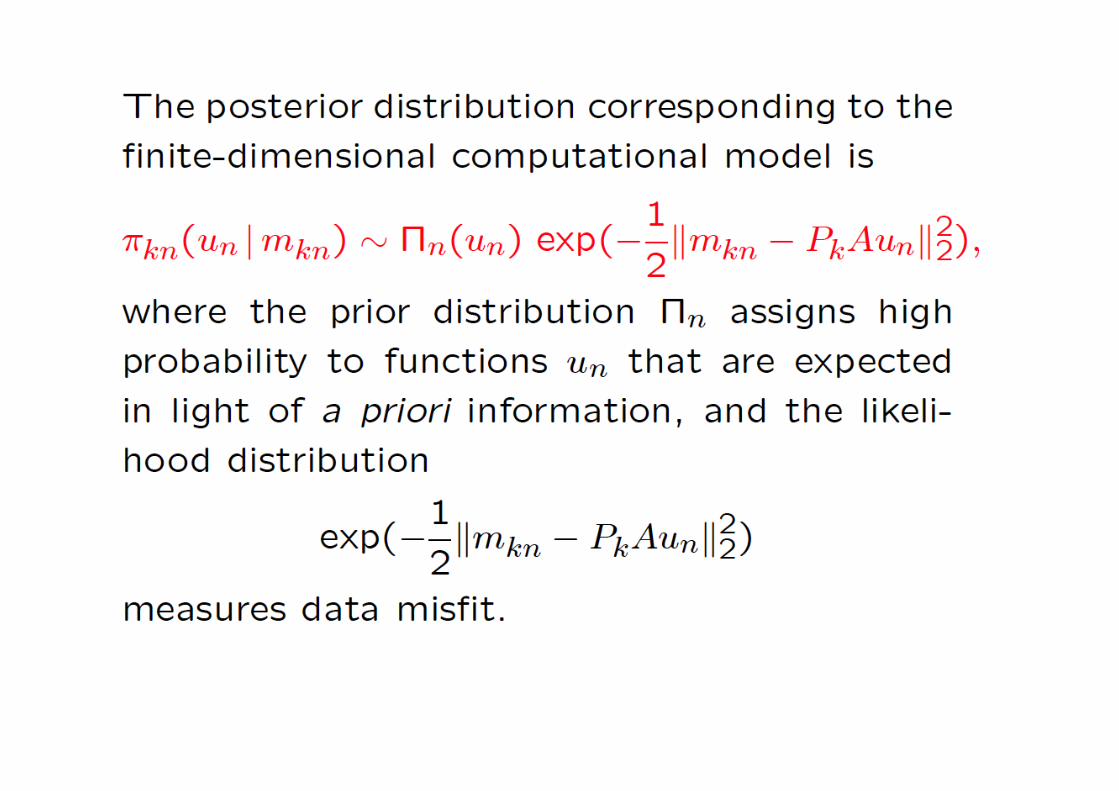
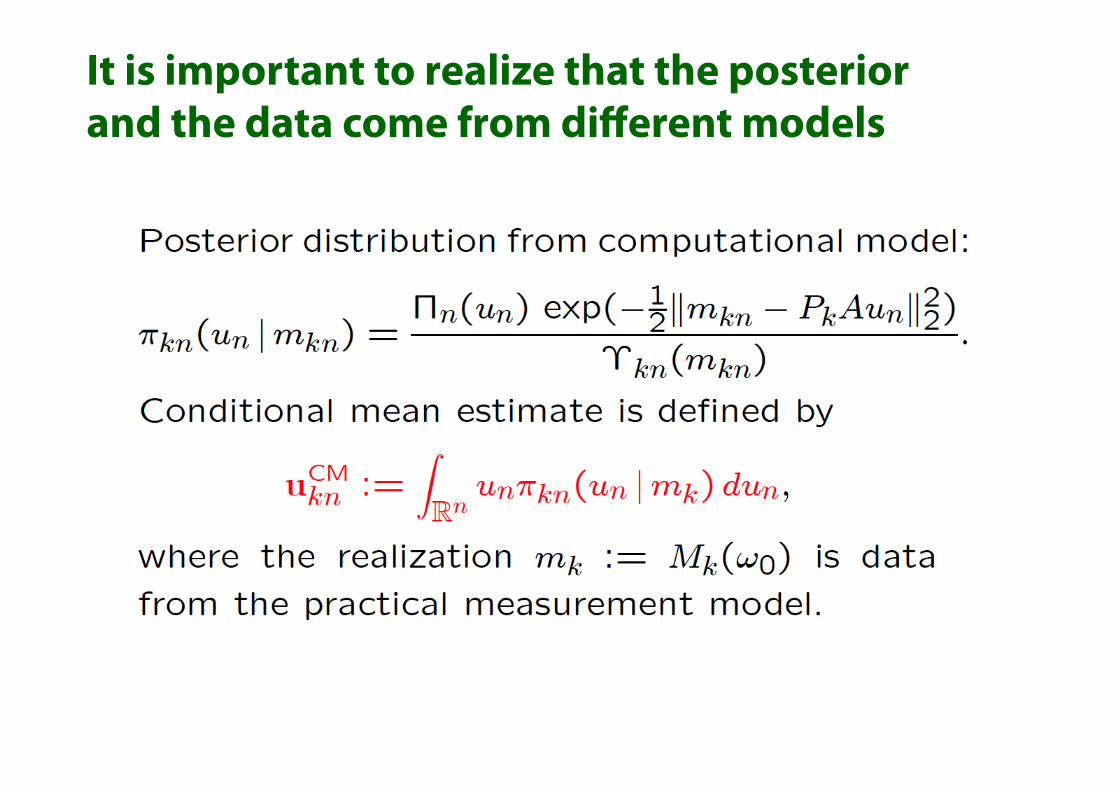
It is important to realize that the posterior and the data come from different models

1. X-rays and the inverse problem of tomography
2. Low-dose imaging using Bayesian inversion
3. Limited-angle dental X-ray tomography
5. Besov space priors and wavelets
4. Discretization-invariance

Wavelet transform divides a function into details at different scales

We introduce a convenient renumbering of the basis functions
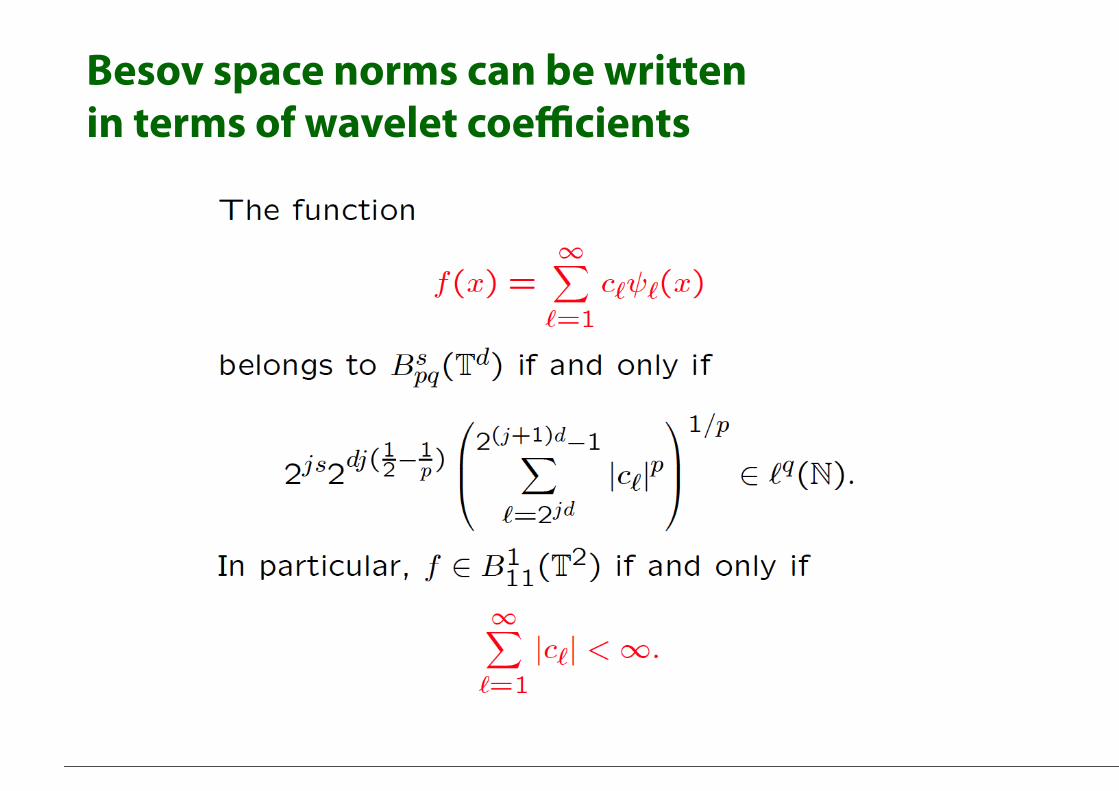
Besov space norms can be written in terms of wavelet coefficients
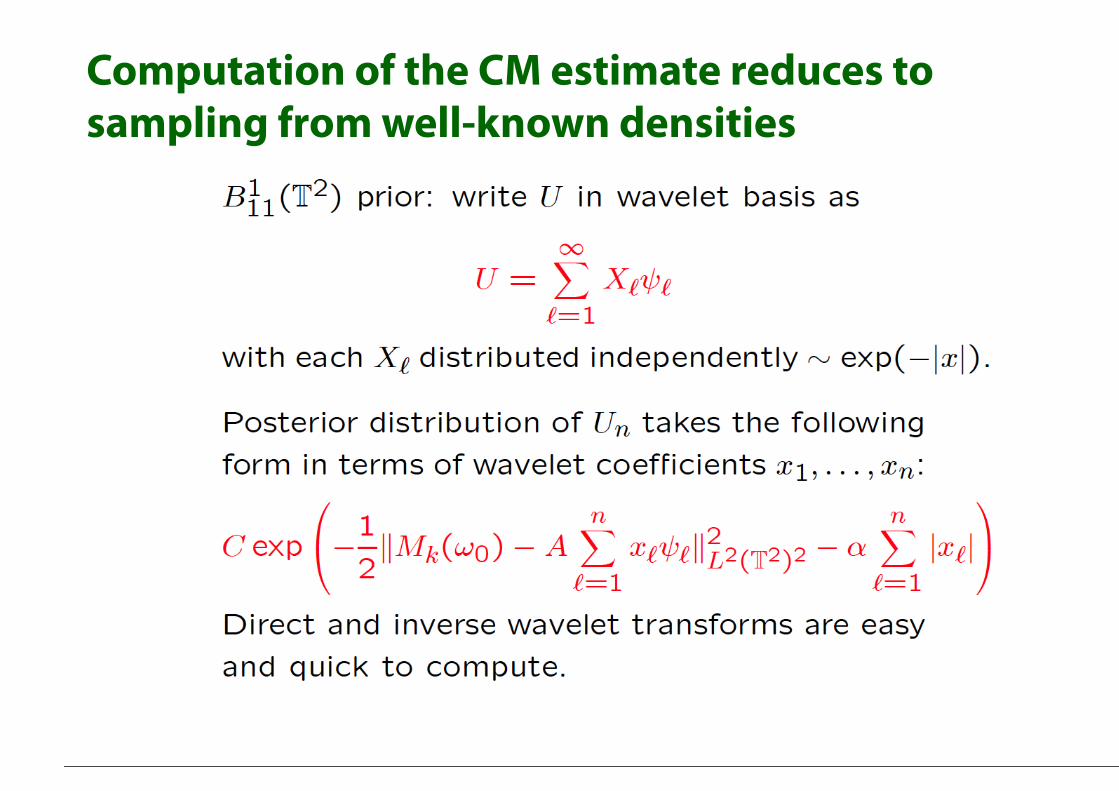
Computation of the CM estimate reduces to sampling from well-known densities

Limited angle tomography results for X-ray mammography
[Rantala et al. 2006] Thanks to GE Healthcare
Tomosynthesis
MAP estimate, Besov prior, p=1.5=q and s=0.5
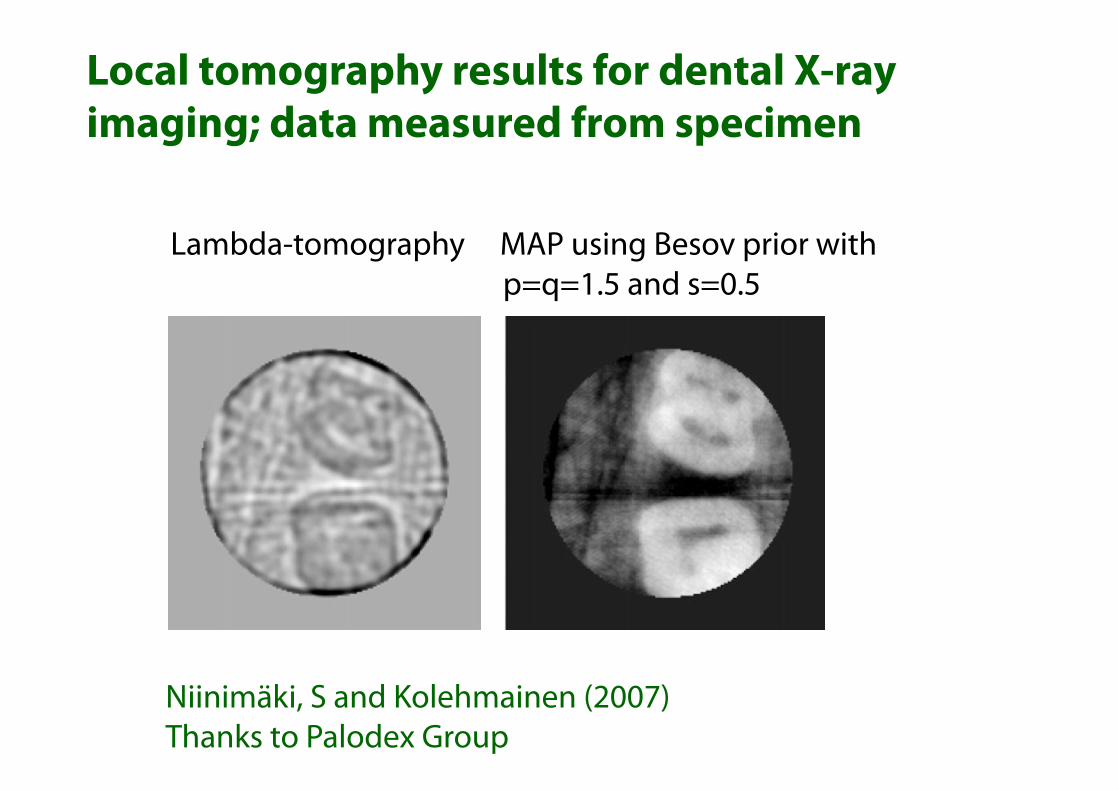
Local tomography results for dental X-ray imaging; data measured from specimen
Niinimäki, S and Kolehmainen (2007) Thanks to Palodex Group
Lambda-tomography MAP using Besov prior with p=q=1.5 and s=0.5
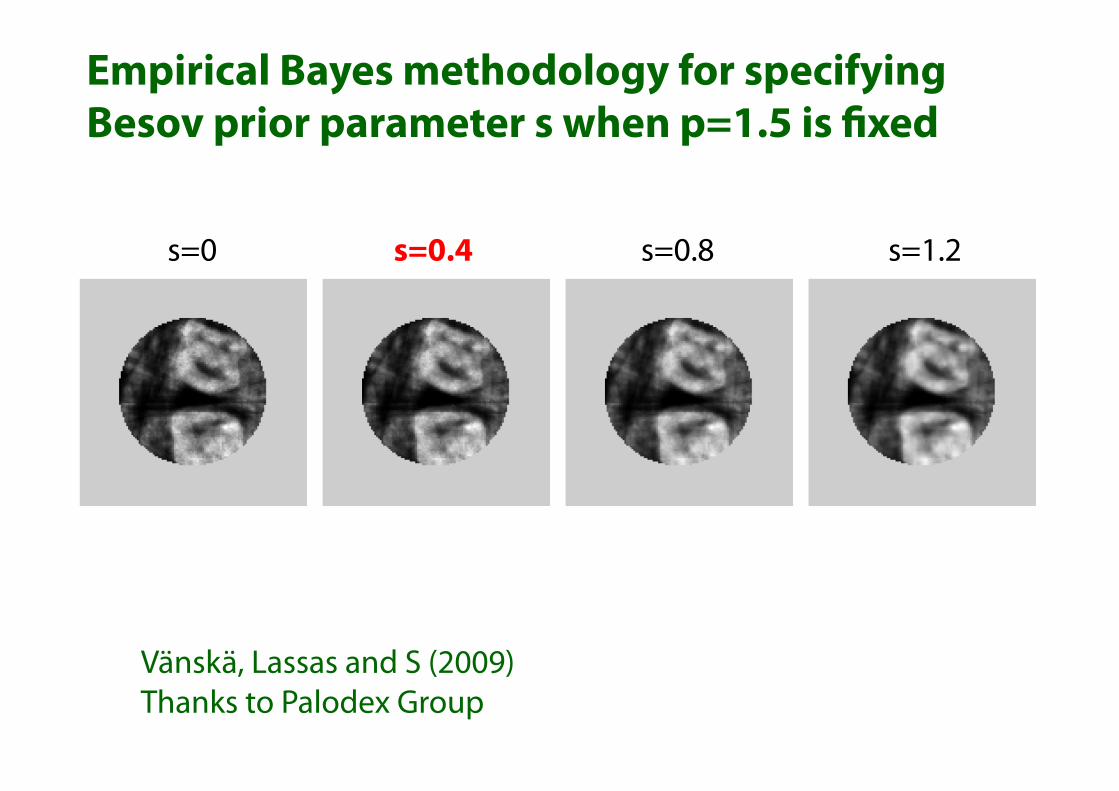
Empirical Bayes methodology for specifying Besov prior parameter s when p=1.5 is !xed
Vänskä, Lassas and S (2009) Thanks to Palodex Group
s=0 s=0.4 s=0.8 s=1.2

The success of total variation regularization makes the choice of Besov parameters s=1 and p=q=1 especially interesting.
However, computations become more involved as the objective function is nonsmooth.

First attempt: Daubechies 7 mother wavelet
We chose a simple one-dimensional deconvolution problem for testing TV and Besov priors. Left: Total variation regularization (equivalent to MAP) Right: MAP with Besov prior when s=1 and p=q=1. We use Daubechies 7 mother wavelet since it is smooth enough to belong to the Besov space. This is joint work with V Kolehmainen, M Lassas and K Niinimäki.

Here s=1 and p=q=1. Dimension n=64
Next we decided to use Haar wavelet to preserve edges.

Here s=1 and p=q=1. Dimension n=128
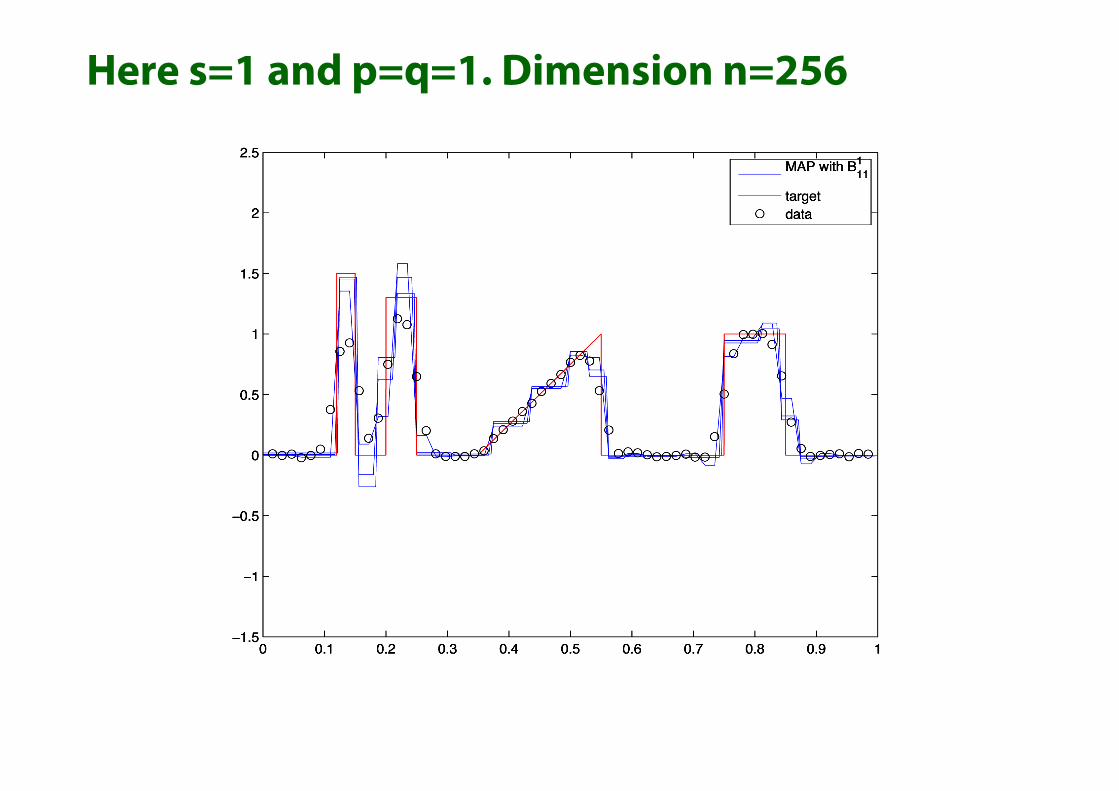
Here s=1 and p=q=1. Dimension n=256
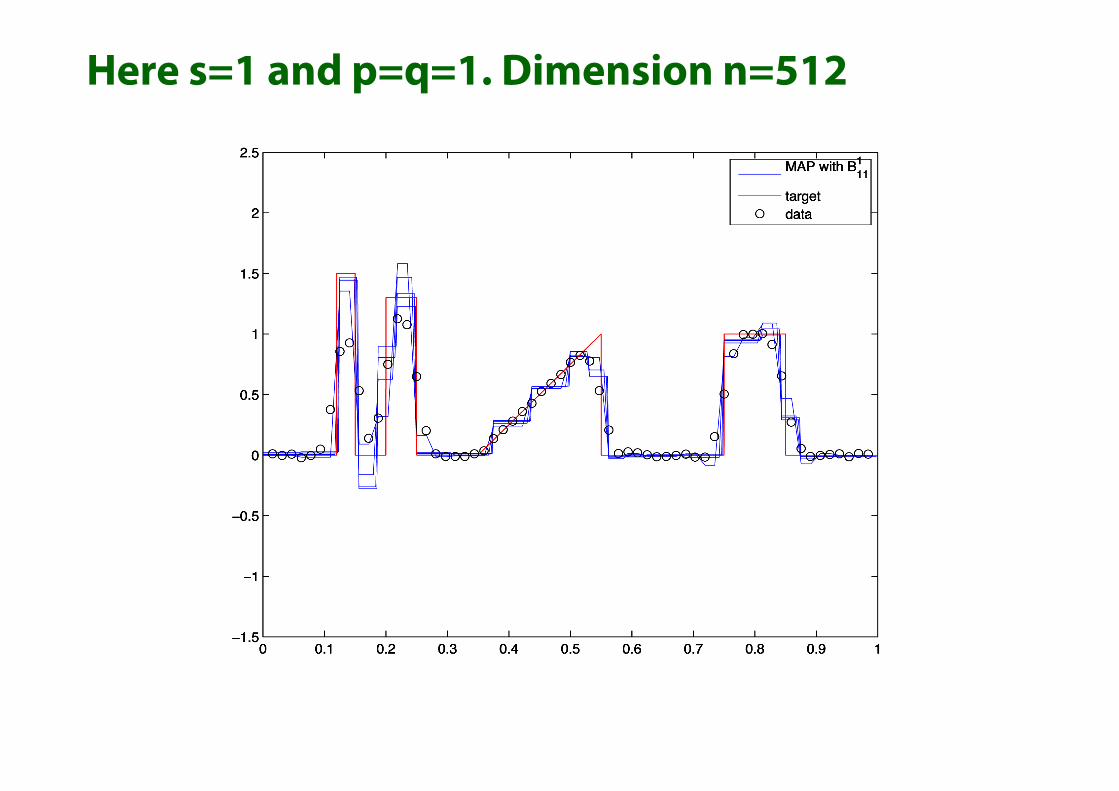
Here s=1 and p=q=1. Dimension n=512
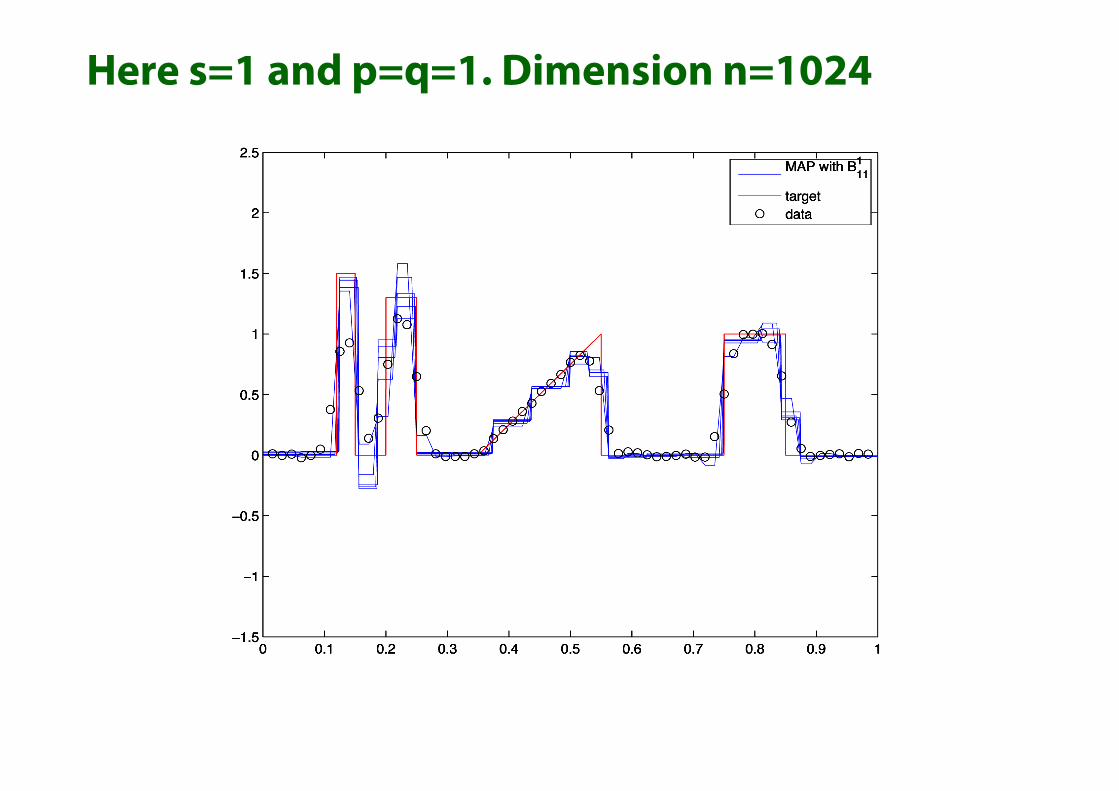
Here s=1 and p=q=1. Dimension n=1024
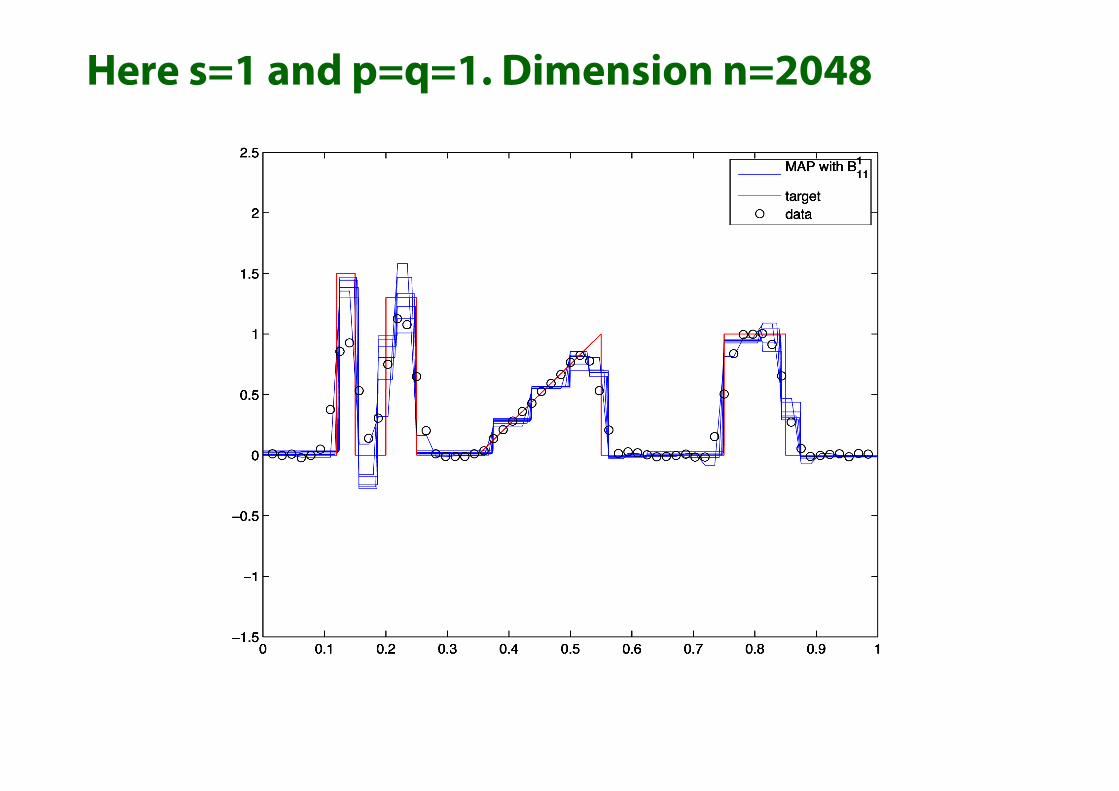
Here s=1 and p=q=1. Dimension n=2048
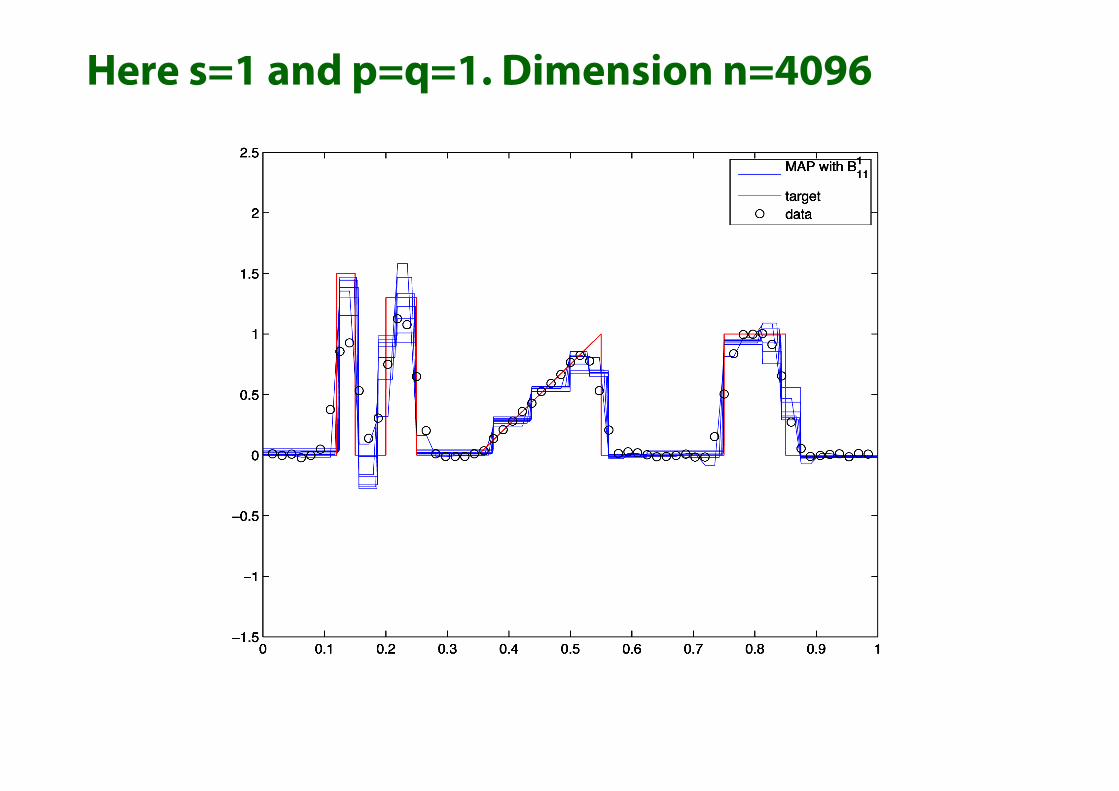
Here s=1 and p=q=1. Dimension n=4096

Our plan is to continue the study of Besov priors.
Next steps include MCMC computation and moving from one-dimensional examples to two-dimensional problems.