
UNIVERSITE KASDI MERBAH OUARGLA
Faculté des Sciences Appliquées
Département de Génie Electrique
Mémoire MASTER ACADEMIQUE
Domaine : Sciences et technologies
Filière : Electrotechnique
Spécialité : Machines électriques et électronique de puissance
Présenté par :
BELAIDI KACI HAMDOU OUSSAMA
Thème:
Soutenu publiquement
Le :31/05/2016
Devant le jury :
Année universitaire 2015/2016
Mr Maghni Bilal MC (A) Président UKM Ouargla
Mr Amieur Toufik MA (A) Encadreur/rapporteur UKM Ouargla
Mr Taibi Djamel MA (C) Examinateur UKM Ouargla
Commande robuste d'un moteur synchrone à
aimant permanent

Avant tout, nous remercions ALLAH tout puissant de nous avoir donné le courage, la volonté, et la patience pour terminer ce travail.
Nos vifs et sincères remerciements s’adressent tout particulièrement à notre Université de
Kasdi Merbah – Ouargla-, qui nous a procuré une bonne formation.
En premier lieu, nous tenons à remercier tout d'abord notre encadreur: Monsieur AMIEUR TOUFIK, Maitre-assistant à l'université Kasdi Merbah -Ouargla- d'avoir offrir
l'opportunité de réaliser ce travail et de bien vouloir accepter de le diriger avec beaucoup de compréhension.
Nous n'oublions pas de remercier notre co-encadreur Mr DJEDDI ABDELGHANI,
Maitre-assistant à l'université Kasdi Merbah -Ouargla; pour avoir suivi et dirigé ce travail.
Nous n'oublions pas de remercier les mombres de jury Mr MAGHNI BILAL, MCA à la Faculté de sciences appliquée de l'université de Kasdi Merbah-Ouargla; pour accepté de
présidé ce travail.
Nous n'oublions pas de remercier les mombres de jury Mr TAIBI DJAMEL, MAA à la Faculté de sciences appliquée de l'université de Kasdi Merbah-Ouargla; pour accepté
d’examiné ce travail.
Nous tenons à remercie aussi: toutes les personnes qui ont participés de près ou de loin pour la réalisation de ce travail.
En fin, nous remerciement à l'en droit de tous notre amis en particulier, ceux de notre
promotion 2015/2016.

Dédicaces
Je dédie ce modeste travail
A ma très chère Mère et mon très cher Père
A ceux qui ont veillé pour mon bien être
A ceux qui m’ont toujours encouragé pour que je réussisse dans mes
études
A tout ce qui est m’encouragé dans la réalisation de ce modeste travail
A mes très chers frères,
A mes très chères sœurs
A toutes la famille
Sans oublier tous mes amies
.

A
Liste des tableaux
N Titre des tableaux Pages
Tableau 1 Paramètres du PID obtenus à partir du point critique
(Ziegler-Nichols) 34
Tableau 2
Paramètres MSAP
49
B
Listes des figures
N Listes des figures Pages
I.1 Différents types de rotors d’une MSAP. 06
1.2 Représentation d’une machine synchrone a aimant permanent 07
1.3 Représentation d’une machine synchrone à aimants permanents 10
I.4 Représentation équivalente dans le repère de Park 13
I.5 Schéma global d'un MSAP à vitesse variable et de son alimentation. 16
II.1 Tracé de Bode de la fonction de transfert idéale. 21
III.1 Schéma bloc d’un système avec correcteur (Boucle fermée) 30
III.2 Schéma fonctionnel d’un système asservi mono-variable. 31
III.3 commande en boucle ouverte. 35
III.4 Schéma bloc avec perturbation et bruit 36
III.5 plan de Nyquist 40
III.6 Fonction de pondération WP 41
III.7 fonction de pondération 42
III.8 Disposition du correcteur PI D dans le plan , 43
IV.1 Boucle de régulation du courant en quadrature-axe de la MSAP 48
IV.2 Le schéma block de de MSAP contrôle de vecteur spatial 49
IV.3 Amélioration de la marge de robustesse en performances du système
bouclé
50

C
IV.4 Amélioration de la marge de Robustesse de stabilité du système
bouclé
51
IV.5 La vitesse en fonction de temps
52
IV.6 Le couple en fonction de temps 53
IV.7 Triphasé courant en fonction de temps 54
D
Table des matières
Introduction Général 2
Chapitre I: Généralités sur Les moteurs synchrones à aimants permanents
I.1. Introduction ……………………………………...………………………………….. 4
I.2. Principe de fonctionnement ……………….…………................................................ 4
I.2.1. Présentation de Machine Synchrone (MS) …….............................................................. 4
I.2.2. Constitution ……………………........................................................................ 5
I.2.2.1. Inducteur …….................................................................................................. 5
I.3.Présentation de la machine synchrone à aimants permanents…………………….. 5
I.3.1. Structure générale de la MSAP ………………………………………………… 7
I.3.2. Differentes structures de machines synchrone a aimants permanents ……… 7
I.3.3. Domaines d’application ……..…………………………………………………….. 8
I.4.Les avantage des machines synchrones à aimants permanentes ………………. 8
I.5. Inconvénients des machines synchrones à aimant permanente ……………………… 9
I.6. Modélisation de la machine synchrone à aimant permanent(MSAP) ……………… 9
I.6.1 Modélisation de la machine ……………………………………………………… 9
I.6.2. Hypothèses simplificatrices …………………………………………………….. 9
I.6.3. Mise en équations de la machin……………………………………...................... 12
I.6.4.Equation de la machine dans le repère de Park (d, q) ……………................... 12

E
I.6.5. Passage du repère d q au repère αβ ……………………………………………….. 14
I.6.6. Application de la transformation de Park à la MSAP ………………………….. 14
I.7. Modélisation de l'alimentation de la MSAP a vitesse variable………………………… 16
I.7.1. Système d’alimentation de la MSAP ……………………………………………. 16
I.8.Conclusion …………………………………......................................................................... 17
Chapitre II: Les systèmes d’ordre fractionnaire
II.1.Introduction ……………………………………………………………………………... 19
II.2. Quelque propriétés de la dérivation non entière ……………………………………... 19
II.3. Transformée de Laplace ………………………………………….................................... 19
II.4.Représentation d’un système d’ordre fractionnaire …………………………………. 20
II.4.1.Equation différentielle généralisée ………………………………………………….. 20
II.4.2.Fonction de transfert d’ordre fractionnaire explicite ………………………………. 20
II.4.3. Représentation d’état d’un système d’ordre fractionnaire ……………………….. 21
II.4.3.1.Réalisation du modèle d’état fractionnaire ………………………………………… 22
II.4.3.1.1.Cas des systèmes commensurables ……………………………………………….. 22
II4.3.1.2.Cas des systèmes d’ordre non entier généralisés …………………………………. 23
II.5. Commandabilité ……………………………….............................................................. 26
II.5.1. Décomposition modale d’un système d’ordre fractionnaire ………........................... 26
II.6. Conclusion ………………………………………………………………………………. 28
Chapitre III: Commande Robuste d’ordre non entier
III.1. Introduction …………………......................................................................................... 30
III.2.Régulateur PID …………………………………………………………………………. 31
III.2.1.Régulateur PID analogique………………………………………………………. 31

F
III.2.2. Régulateur proportionnelle (P) ………….………………………………………… 31
III.2.3. Avantages et inconvénients de l’action proportionnelle …………………….. 32
III.2.3.1.Régulateur proportionnelle et intégrateur (PI) …………………………….. 32
III.2.3.2. Régulateur proportionnelle et dérivateur (PD) ……………………………. 33
III.2.3.3. Régulateur proportionnelle intégrateur et dérivateur (PID) ………… 33
III.3. Méthode de synthèse des contrôleurs ( 𝛂 = 𝛃 = 𝟏)…………………………………… 34
III.4. La commande en boucle ouverte ……………………………………………………… 35
III.5.Caractérisation des systèmes de commande à contre-réaction ……... ……………. 35
III.5.1. Les fonctions de sensibilité ………...................................................................... 36
III.6. Modelage des fonctions de sensibilité …………………………………………38
III.6.1.Sepecification de performance en sensibilité …………………………….….. 39
III.7. Régulateur PID Fractionnaire ……………………………………………………..… 42
III.7.1. Conception d’une commande PIα
Dβ
d’ordre fractionnaire …………………… 44
III.8. Conclusion ……………………………………………………………………………… 45
Chapitre IV: Commande robuste d’un moteur synchrone à aimant permanent
IV .1.Introduction ………………………………………………… …………………………. 47
IV .2. Le modèle mathématique du moteur synchrone à aimant permanent en tension
dans le système de coordonnées dq tournant ………………………………………………. 47
IV.3. Résultats de Simulation ………………………………………………………………. 50
IV.4.Conclusion ……………………………………………………………………………. 55
Conclusion
Références Bibliographiques
Annexes

G


1

2
Introduction général
La commande de certains processus industriels issus d’une modélisation mathématique, pose
de sérieux problèmes dans la mesure des processus toujours un écart entre le comportement
du système physique réel, et le système modélisé.
La théorie de la commande robuste, regroupe plusieurs méthodes d’analyse et de conception
de contrôleurs réduisant l’écart entre le système réel et le modèle identifié Parmi ces
méthodes nous allons synthétiser un contrôleur robuste par la méthode des gains principaux
fractionnaires pour des systèmes (Mono et Multi-variables), et vérifier la satisfaction des
conditions de robustesse de la stabilité et des performances.
La problématique traitée dans ce mémoire est le suivant : Comment optimiser les paramètres
d’un contrôleur fractionnaire obtenu via la minimisation d’un critère de sensibilité mixte en
utilisant l’algorithme d’optimisation non linéaire de type FMin-Max sous contraintes?
Pour répondre à cette problématique, notre mémoire est organisé comme suit :
Le premier chapitre sera destiné à la description généralités sur Les moteurs synchrones à
aimants permanents.
Dans le deuxième chapitre, on va étudier Les systèmes d’ordre fractionnaire
Le troisième chapitre sera consacré à l’étude de la Commande Robuste d'Ordre fractionnaire
des systèmes d'ordre non entier mon-variables et multi-variables.
Le quatrième chapitre présentera l’application de la Commande robuste d’un moteur
synchrone à aimant permanent
On terminera par une conclusion générale et des perspectives.

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
4
I.1. Introduction :
Les moteurs synchrones à aimants permanents se répandent de plus en plus comme
actionneurs dans les industries automatisées où ils remplacent les moteurs à courant continu.
Ils présentent sur ces derniers l’avantage d’avoir de meilleures performances (en termes de
couple massique, par exemple) et de ne pas avoir de collecteur mécanique (ce collecteur pose
des problèmes d’entretien et de comportement dans les environnements difficiles).
En revanche, ils sont plus exigeants, le moteur à courant continu est alimenté par un
convertisseur statique simple (un redresseur) et une régulation de son courant d’induit permet
de maîtriser le couple.
Pour le MSAP, la fonction de collecteur est réalisée par un ensemble électronique : un
onduleur de puissance, une mesure de position et une commande des courants pour contrôler
le couple. La commande non linéaire présente l’avantage de pouvoir commander séparément
les courants et le couple.
Avec cette technique de commande, le modèle du moteur est décomposé en deux sous-
systèmes linéaires mono variables indépendants.
Chaque sous-système représente une boucle indépendante de commande d’une variable
donnée (vitesse, couple, courant etc.).
La dynamique du système linéarisé est choisie par une imposition optimale des pôles.
I.2. Principe de fonctionnement
Une génératrice synchrone transforme de l'énergie mécanique ( , )c en énergie électrique
( ,V I de fréquence f ).
Un aimant tourne à la fréquence N, la spire est traversée par un flux variable ( )t
d'où la création d'une f.é.m. induite ( ) ( / )e t d dt
.
I.2.1. Présentation de Machine Synchrone (MS)
La moteur synchrone, appelée ALTERNATEUR si elle fonctionne en génératrice,
fournit un courant alternatif. En fonctionnement MOTEUR sa fréquence de rotation est
imposée par la fréquence du courant alternatif qui alimente l'induit.
Au-delà de quelques kilowatts, les machines synchrones sont généralement des machines
triphasées. Le rotor, souvent appelé « roue polaire », est alimenté par une source

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
5
I.2.2. Constitution
La MS possède deux parties principales :
- L'inducteur porté le plus souvent par le rotor
- L'induit porté par le stator parcouru par des courants alternatifs
I.2.2.1. Inducteur
Le champ magnétique est créé par un aimant permanent ou par un électroaimant
alimenté par un courant continu (I), appelé courant d'excitation. Le rotor tourne à la vitesse
synchronise.
Remarque : si I est constant, il crée un champ magnétique B, constant, tournant à la fréquence
de synchronisme N= N.
Rotor à pôles saillants
C'est un électro-aimant dont les pôles sont alternativement nord et sud. Les
enroulements sont alimentés en courant continu, ils sont placés autour des noyaux
polaires. Le nombre de pôles est toujours pair, il varie suivant la machine. Est réalisé à la
figure 1.1
Rotor à pôles lisses
Le rotor est un cylindre plein dans lequel on a usiné des encoches. Il possède le plus
souvent deux pôles.
I.3. Présentation de la machine synchrone à aimants permanents
Le moteur synchrone à aimants permanents (MSAP) présente un stator semblable au
stator de toutes les machines électriques triphasées. Le changement du bobinage rotorique par
désaimant permanents apporte beaucoup de simplicité comme l'élimination des ballais (donc
les pertes rotoriques).
Cependant, le flux rotorique n’est plus commandable.
Le développement des matériaux magnétiques permet aux MSAP d’être de plus en plus
utilisées dans différents domaines de l’industrie. La densité de puissance massique élevée, le
rendement élevé, l’augmentation de la constante thermique et l'augmentation de la fiabilité
(due à l’absence des contacts glissants bagues-ballais de ces machines) leurs permettent de
concurrencer fortement les machines asynchrones et à courant continu,.

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
6
Le rotor possède différentes configurations, La figure I.1 montre trois cas
Une configuration du rotor à pôles saillants possédant des pièces polaires servant à la
concentration du flux est montrée à la figure I.1.a. Les aimants permanents sont
magnétisés dans le sens radial.
Une autre possibilité consiste à disposer les aimants permanents radialement (aimants
noyés dans le rotor), Les aimants sont magnétisés tangentiellement comme le montre
la figure I.1.b.
Enfin la figure.I.1.c représente le cas où les aimants permanents sont distribués
uniformément sur la surface cylindrique du rotor. L’aimantation des aimants est
radiale.
A cause de l’isotropie existante dans ce cas de machine, l’inductance Ld sur l’axe direct est
égale à l’inductance Lq sur l’axe en quadrature. Par contre, elles sont différentes dans les
autres cas.
Figure I.1 : Différents types de rotors d’une MSAP.
(a) aimants permanents (1) et pièce polaire saillante (2).
(b) aimants permanents (1) noyés.
(c) aimants permanents (1) distribués sur la surface du rotor.
Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
7
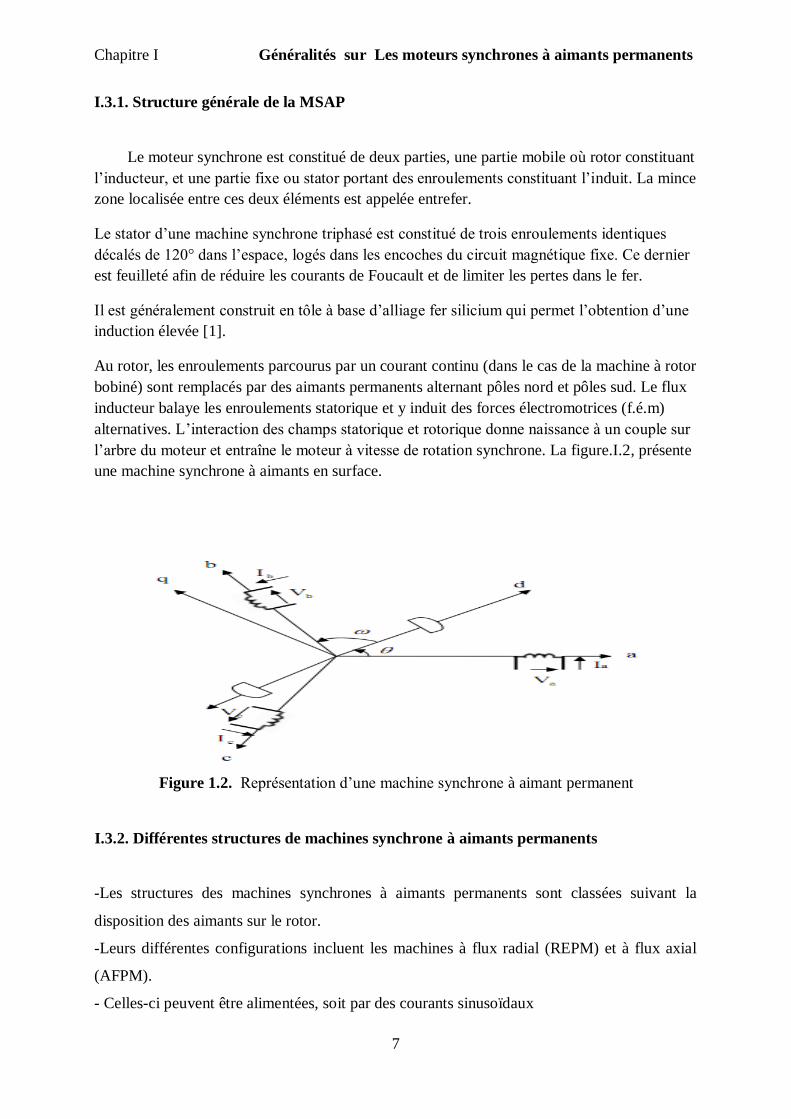
I.3.1. Structure générale de la MSAP
Le moteur synchrone est constitué de deux parties, une partie mobile où rotor constituant
l’inducteur, et une partie fixe ou stator portant des enroulements constituant l’induit. La mince
zone localisée entre ces deux éléments est appelée entrefer.
Le stator d’une machine synchrone triphasé est constitué de trois enroulements identiques
décalés de 120° dans l’espace, logés dans les encoches du circuit magnétique fixe. Ce dernier
est feuilleté afin de réduire les courants de Foucault et de limiter les pertes dans le fer.
Il est généralement construit en tôle à base d’alliage fer silicium qui permet l’obtention d’une
induction élevée [1].
Au rotor, les enroulements parcourus par un courant continu (dans le cas de la machine à rotor
bobiné) sont remplacés par des aimants permanents alternant pôles nord et pôles sud. Le flux
inducteur balaye les enroulements statorique et y induit des forces électromotrices (f.é.m)
alternatives. L’interaction des champs statorique et rotorique donne naissance à un couple sur
l’arbre du moteur et entraîne le moteur à vitesse de rotation synchrone. La figure.I.2, présente
une machine synchrone à aimants en surface.
Figure 1.2. Représentation d’une machine synchrone à aimant permanent
I.3.2. Différentes structures de machines synchrone à aimants permanents
-Les structures des machines synchrones à aimants permanents sont classées suivant la
disposition des aimants sur le rotor.
-Leurs différentes configurations incluent les machines à flux radial (REPM) et à flux axial
(AFPM).
- Celles-ci peuvent être alimentées, soit par des courants sinusoïdaux

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
8
- Dans le cas des MSAP ou par des courants en créneaux dans le cas BDCM.
- Une vue schématique des deux types de machines a aimants, a flux radial et a flux axial.
I.3.3. Domaines d’application
Le moteur synchrone à aimants permanents est utilisé dans une large gamme de
puissance, allant des centaines des watts (servomoteur) à plusieurs méga watts (système de
propulsion des navires) [2], C’est ainsi que le moteur synchrone peut être très utile dans de
nombreuses applications, comme [3] :
Les équipements domestiques (machine à laver le linge),
Les automobiles,
Les équipements de technologie de l’information (DVD drives),
Les outils électriques, jouets, système de vision et ses équipements,
Les équipements de soins médicaux et de santé (fraise de dentiste),
Les servomoteurs,
Les applications robotiques,
La production d’électricité,
Les propulsions des véhicules électriques et la propulsion des sous-marins,
Les machines-outils,
Les applications de l’énergie de l’éolienne,
I.4. Les avantage des machines synchrones à aimants permanentes
[5], [4]
Lors de construction des machines synchrones a aimants permanents (MSAP)
l’utilisation des aimants permanents a la place des bobinages d’excitation offrent beaucoup
d’avantage :
Commutateur mécanique remplacé par une autre électronique, ce qui a pour effet de
rendre le contrôle du moteur plus complexe et coûteux que celui d'un moteur à courant
continu,
suppression de l’alimentation du rotor (absence du contact bagues balais).
moins des pertes de cuivre, les pertes viennent surtout du stator.
facteur de puissance et rendement du moteur est améliorées.
une faible inertie et un couple massique élevé.
une meilleure performance dynamique.
construction et maintenance plus simple.
pas d’échauffement au rotor, et absence des pertes joules.

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
9
Le choix des aimants permanents dépend des facteurs suivants:
Performance du moteur,
Poids du moteur,
Dimension du moteur,
Rendement du moteur,
Facteur économique.
I.5.Inconvénients des machines synchrones à aimants permanents
Prix des aimants le rend plus cher,
La présence de pulsation de couple,
Risque de désaimantation, ce qui limite l'utilisation par les des contraintes comme la
température max, courant max….etc,
Pertes par courant de Foucault dans les aimants.
I.6. Modélisation de la machine synchrone à aimant permanent (MSAP)
I.6.1. Hypothèses simplificatrices
Afin de simplifier l’étude, la modélisation de la MSAP nécessite un certain nombre
D’hypothèses simplificatrices
• Le circuit magnétique n’est pas saturé, ce qui permet d’avoir des relations linéaires
entre les flux et les courants.
Nous négligeons l’hystérésis du circuit magnétique et les pertes par courants de
Foucault
La variation des résistances en fonction de la température est négligeable Nous
admettons que les forces magnétomotrices sont à distribution spatiale sinusoïdale.
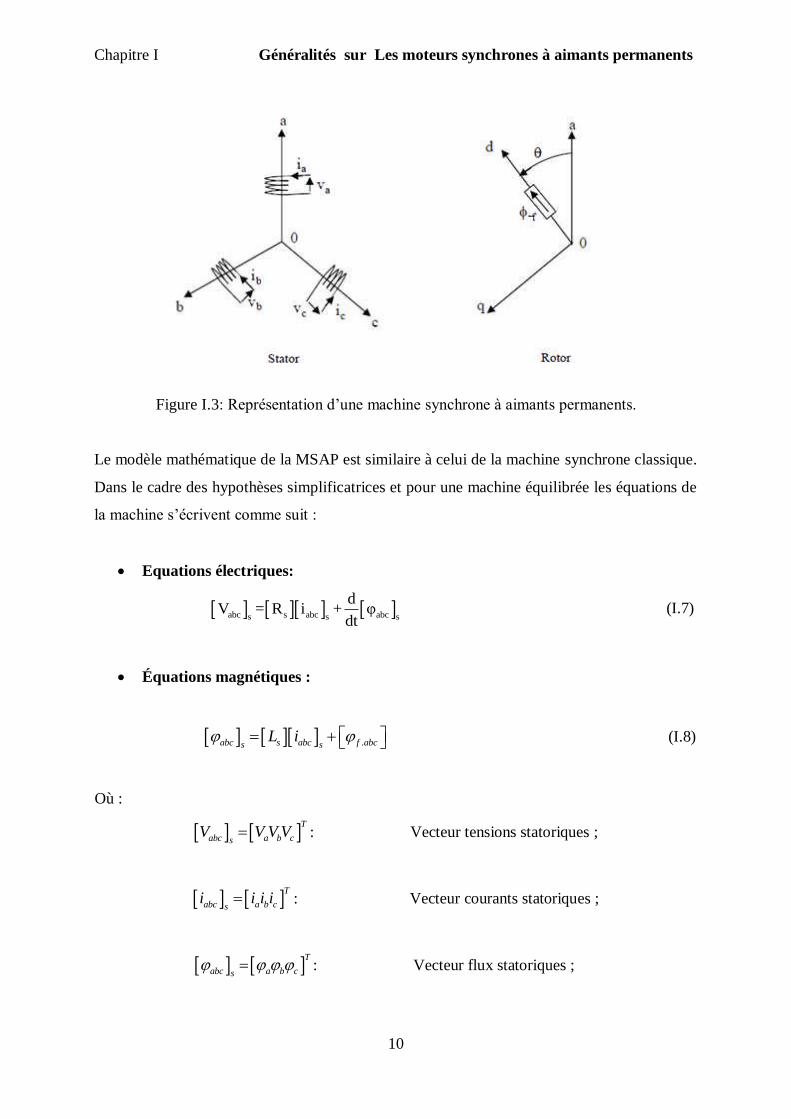
I.6.2. Mise en équations de la machine
La figure I.3 Le modèle mathématique du MSAP est similaire à celui de la machine
synchrone classique en considérant les conditions simplificatrices citées précédemment.
Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
10
Figure I.3: Représentation d’une machine synchrone à aimants permanents.
Le modèle mathématique de la MSAP est similaire à celui de la machine synchrone classique.
Dans le cadre des hypothèses simplificatrices et pour une machine équilibrée les équations de
la machine s’écrivent comme suit :
Equations électriques:
abc s abc abcs s s
dV = R i + φ
dt (I.7)
Équations magnétiques :
.abc s abc f abcs s
L i (I.8)
Où :
T
abc a b csV V V V : Vecteur tensions statoriques ;
T
abc a b csi i i i : Vecteur courants statoriques ;
T
abc a b cs : Vecteur flux statoriques ;

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
11
0 0
0 0
0 0
s
S s
s
R
R R
R
(I.9)
.
T
f abc af bf cf (I.10)
On désigne par :
sL : Matrice d’inductances statorique. Elle contient des termes constants que nous
regroupons
Dans 0sL et des termes variables dépendant de que nous regroupons dans 2 ( )sL
0 2S S SL L L (I.11)
0 0 0
0 0 0 0 2 2
0 0 0
2 4cos 2 cos 2 cos 2
3 3
2 4; cos 2 cos 2 cos 2
3 3
4 4cos 2 cos 2 cos 2
3 3
S S S
S S S S S S
S S S
L M M
L M L M L L
M M L
(I.12)
0Ms : Inductance mutuelle entre deux phases statoriques,
0Ls : Inductance propre d’une phase statorique,
: caractérise la position angulaire du rotor par rapport au stator.
La dernière relation importante complétant le modèle de la MSAP, est l’équation
fondamentale de la mécanique décrivant la dynamique du rotor de la machine :
r e r
dJ f C C
dt
(I.13)
Avec :
J: Moment d’inertie de la partie tournante;
: Vitesse angulaire mécanique du rotor;
Ce: Couple électromagnétique de la machine;
Cr: Couple résistant, ou de charge;

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
12
f r : Coefficient de frottement.
I.6.3 Modélisation de la machine
Le modèle de machine synchrone, exprimé dans le référentiel lié au rotor sous forme
d'équations d’état avec les hypothèses simplificatrices [2], s’écrit :
( ) .F X GU
Y H X
X
(I.1)
Avec:
1 1
2 2
( ) ( )( )
( ) ( )
y X h XY X
y X h X
1
2
dx I
x
(I.2)
1
2
3
;
d
q
Ix
X x I
x
d
q
VU
V
;
1
1
0
0
0 0
dL
LqG
(I.3)
1 1 2 2 31
2 1 2 2 1 3 3 3
31 3 2 1 2 3 2
f (X)
( ) f (X)
f (X)r
x x x
F X b x b x x b x
Cc x c x x c x
J
(I.4)
1 2 1 2; ; ; ;
q s d
d d q q
p L R p LRa a b b
L L L L
(I.5)
3 1 2 3; ; ; ;d qf f
q
p L Lp pfb c c c
L J J J
(I.6)
I.6.4.Equation de la machine dans le repère de Park (d, q)
Les équations obtenues dans le repère (a,b,c) sont fortement non-linéaires et couplées.
Elles sont fonctions de la position du rotor

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
13
Ceci fait apparaître des difficultés pour la résolution du système. Pour simplifier ce
problème, la plupart des travaux dans la littérature font appel à l’utilisation de la
transformation de Park.
Cette transformation, appliquée aux variables réelles (tensions, courants et flux),
permet d’obtenir des variables fictives appelées les composantes d-q ou de Park. Ceci
peut être interprété comme étant une substitution des enroulements des phases du
système réel (a, b, c) en enroulements orthogonaux d’axes (d, q) tournant à une vitesse
par rapport au stator figure I.4. Ce changement de repère rend les équations
dynamiques de la machine plus simples ce qui facilite leur étude et leur analyse.
Figure I.4 : Représentation équivalente dans le repère de Park.
La transformation de Park est définie comme suit:
( )dqo abcX P X (I.14)
Où X peut-être un courant, une tension ou un flux et θ représente la position du rotor.
Les termes ,Xd Xq représentent les composantes longitudinale et transversale des variables
sratoriques (tensions, courants, flux et inductances).
La matrice de transformation P est donnée par :
Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
14
2 4cos cos cos
3 3
2 2 4( ) sin sin sin
3 3 3
1 1 1
2 2 2
P
(I.15)
Où correspond à la position du repère choisi pour la transformation.
Dont la matrice inverse a pour forme:
1
cos sin 1
2 2( ) cos sin 1
3 3
4 4cos sin 1
3 3
P
(I.16)
Avec s pour le stator et r pour le rotor.
Le moteur est supposé être connecté en étoile et forme donc un système équilibré
Ia+Ib+Ic=0.
Ainsi, la composante homopolaire désignée par la troisième ligne de la matrice (I.15) est
nulle.
I.6.5. Passage du repère d q au repère αβ
Le passage aux composantes de Park est donné par une matrice de rotation [6]:
dqX R X (I.17)
Avec :
cos sin
sin cosR
(I.18)
I.6.6. Application de la transformation de Park à la MSAP
On choisissant le référentiel de Park (d, q) lié au rotor et en appliquant la transformation
(1.14) au système (I.7), on obtient :

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
15
( ) ( ) ( )dq abc s abc abcs s s
dV P V P R i P
dt (I.19)
Ensuite, en se basant sur (I.16) et (I.7) on obtient:
1 1 1
( ) ( ) ( ) ( ) ( ) ( ( ) )dq s dq dq dq
d dV P R P i P P P P
dt dt
(I.20)
Du moment que [RS] est diagonale, alors :
1
( ) ( )s sP R P R
En utilisant :
1
0 1 0
( ) ( ( ) ) 1 0 0
0 0 0
d dP P
dt dt
(I.21)
Et à l'aide de (I.17), on peut déduire les équations de Park sous une forme vectorielle comme
suit :
*
dq S dq dq dq
dV R i p
dt (I.22)
Ou :
0
, ,0
d dS
dq S dq
q qS
V iRV R i
V iR
, (I.23)
*,d d
dq dq
q q
(I.24)
Et la transformation (I.7) appliquée à (I.2) donne :
0
0 0
d d d f
q q q
L i
L i
(I.25)

Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
16
I.7. Modélisation de l'alimentation de la Msap a vitesse variable
L’alimentation doit pouvoir fournir et récupérer en cas de freinage, l’énergie électrique
du moteur. Elle est généralement composée d’un convertisseur statique alimenté par une
source de tension continue constante, qui permet d’imposer aux enroulements statoriques de
la machine des tensions d’amplitude et de fréquence réglables en agissant sur la commande
des interrupteurs du convertisseur statique. Elle présente la solution adéquate pour le
démarrage des moteurs synchrones qui ne peuvent avoir couple hors synchronisme.
L’implantation de la commande nécessite la modélisation complète de tout le système (la
machine synchrone associée à un convertisseur statique). On va présenter dans ce qui suit la
modélisation de l’alimentation de la MSAP.
I.7.1. Système d’alimentation de la MSAP
Les machines électriques alimentées par des convertisseurs statiques dont le schéma de
principe est représenté par la Figure I.6 sont utilisées comme des actionneurs rotatifs dans
beaucoup d’équipements industriels à vitesse variable.
Figure I.5: Schéma global d'un MSAP à vitesse variable et de son alimentation.
Les caractéristiques exigées de l’actionneur électrique dépendent à la fois de la
machine, de son alimentation et de la commande de l’ensemble. Ces caractéristiques
sont:
Un couple avec le minimum d’ondulation possible, contrôlable par le plus petit
nombre de variable, en régime dynamique comme en régime permanent.
Une large plage de variation de vitesse.
Des constantes de temps électrique et mécanique faibles.
La source d’alimentation triphasée est supposée symétrique, de fréquence et
d’amplitude de tension constante.
Chapitre I Généralités sur Les moteurs synchrones à aimants permanents
17
I.6.Conclusion :
Une simple comparaison des machines synchrones à aimants permanents avec les autres
types des machines laisse deviner un avenir brillant pour la machine a aimants surtout avec
l’apparition des aimants très performants.
On a présente dans ce chapitre la machine synchrone a aimants permanents, sa constitution
fondamentale (partie induit et partie inducteur) et puisque nous pouvons distinguer les
différents types de machine synchrones a aimants permanents par la structure de leur rotor, on
a analysée ces structures en présence de pièce polaire et sa pièce polaire avec aimantation
radiale et tangentielle.
Ainsi on a mis en évidences les avantages, et les domaines d’application de la machine
synchrone à aimants permanents.

Chapitre II Les systèmes d'ordre fractionnaire
18

Chapitre II Les systèmes d'ordre fractionnaire
19
II.1.Introduction:
Dans ce chapitre, nous allons présenter les formes usuelles de représentation et
quelques méthodes couramment utilisées pour l’analyse et la simulation d’une classe de
systèmes d’ordre fractionnaire. Une analyse comparative des performances caractéristiques
de ce type de systèmes avec celles des systèmes d’ordre entier est présentée.
II.2. Quelque propriétés de la dérivation non entière
Les principales propriétés des opérateurs d'ordre fractionnaire sont les suivantes [7]:
1.Si f t est une fonction analytique de t, alors sa dérivée d'ordre fractionnaire mD f t est
une fonction analytique de t et m.
2. Pour m n , où est un entier, l'opération mD f t donne le même résultat que la
différentiation classique d'ordre entier n.
3.Pour 0m l'opération mD f t est l'opérateur identité : 0D f t f t
4.La différentiation et l'intégration d'ordres fractionnaire sont des
opérations linéaires 1,2,..., 1k
f t k m
5.La loi additive (propriété du semi-groupe) a B aD D f t D f t
6.la dérivée non entière de f t nécessite la connaissance de f t sur l'intervalle 0 ,t t alors
que dans le cas entier, seule la connaissance "locale" de autour de t est nécessaire. Cette
propriété permette d'interpréter les systèmes non entiers comme des systèmes à mémoire
longue, les systèmes entiers étant alors interprétables comme des systèmes à mémoire courte
II.3. Transformée de Laplace :
La transformée de Laplace F, fonction de l’opérateur de Laplace s, d’une fonction f,
dépendant du temps t, est définie par la relation :
_
0
; .stF s L f t s f t e dt
(II.1)
La transformation de Laplace d’une dérivée d'ordre β de la fonction f est donnée par la
relation :
; . ;B BL D f t s S L f t s (II.2)

Chapitre II Les systèmes d'ordre fractionnaire
20
II.4. Représentation d’un système d’ordre fractionnaire:
Les systèmes fractionnaires sont en général représentés par des équations
différentielles non entières, mais d’autres descriptions peuvent être utilisées, telle que la
représentation diffusive. Dans notre cas nous considérons un système d’ordre non entier,
linéaire à temps continu causal et invariant dans le temps décrit par l’approche classique, et
représenté comme dans le cas entier par trois modèles [8]:
Equation différentielle généralisée.
Fonction de transfert fractionnaire.
Représentation d’état fractionnaire.
II.4.1. Equation différentielle généralisée :
De manière générale, un système d’ordre non entier mono -variables, linéaire à temps
invariant est décrit par une équation différentielle généralisée de la forme :
1 1( ) ( ) ( )ji
n m ba
i ji jy t a D y t b D u t
(II.3)
Ou 𝑢 𝑡 ∈ 𝑅 𝑒𝑡 𝑦 𝑡 ∈ 𝑅 désignent respectivement l’entrée et le sortir du système, 𝑎𝑖 , 𝐵𝑗 ∈
𝑅, Lorsque les ordres de dérivation 𝑎𝑖 , 𝐵𝑗 sont tous multiples d’un même nombre réel à tel
que 𝑎𝑖 = 𝑖 𝑎 , 𝐵𝑗 = 𝑗 𝑎 , le système non entier est dit d’ordre commensurable.
II.4.2. Fonction de transfert d’ordre fractionnaire explicite
Plusieurs systèmes dynamiques naturels ont un comportement qui peut être modélisé par des
équations différentielles comprenant des dérivées d'ordre fractionnaire. En appliquant la
transformée de Laplace à de telles équations, et en supposant des conditions initiales nulles,
nous obtenons des fonctions de transfert avec des puissances d'ordre non entier de la variable
complexe de Laplace s.

Chapitre II Les systèmes d'ordre fractionnaire
21
Figure.II.1 : Tracé de Bode de la fonction de transfert idéale.
Une forme générale de la fonction de transfert d'ordre fractionnaire est donnée par
l'expression suivante :
*1
1
; ; ; ; ;i
j
M q
iij i j iN q
jj
b sF s M N a b p q
a s
(II.4)
Parfois toutes les puissances de s sont multiples d'une certaine valeur q, la fonction de
transfert (II.4) devient alors :
*1
1
; ; ; ;
q
q
M i
iij iN j
jj
b sF s M N q a b
a s
(II.5)
Une fonction de transfert de la forme (II.5) est dite "commensurable". Si de plus, le nombre
réel q est l'inverse d'un nombre entier Q, la fonction de transfert peut être réécrite sous la
forme :
*1
1
; ; ; ;
iM q
iij ij
N q
jj
b sF s M N Q a b
a s
(II.6)
En général une fonction de transfert d'ordre fractionnaire ne peut pas se mettre sous La
forme (II.6), mais celles qui le peuvent sont plus faciles à étudier. Les fonctions de Transfert
d'ordre entier sont souvent des cas particulier de la forme, quand 1Q .Si le processus
fractionnaire est MIMO (à entrées multiples et sorties multiples) ses n entrées et ses m sorties
seront reliées par le biais d'une matrice de transfert n _ m dont Les éléments sont similaires.
II.4.3. Représentation d’état d’un système d’ordre fractionnaire :
Le modèle d’état d’un système d’ordre fractionnaire est défini comme dans le cas entier
par deux équations :
Une équation d’état : dans laquelle chaque variable d’état xi(t) est dérivée à un

Chapitre II Les systèmes d'ordre fractionnaire
22
ordre non entier ai . Dans ce cas parle de la représentation d’état généralisée. Dans le
cas des systèmes commensurable ; tous les états xi(t) sont dérivé à un même ordre
non entier α.
Une équation de sortie : qui est une combinaison linéaire des états, comme dans le
cas entier.
Il en résulte un modèle d’état, écrit sous la forme compacte suivante :
D x Ax Bu
y Cx Du
(II.7)
Ou :
u : est le vecteur des entrées de dimension nu × 1;
x : est le vecteur d’état d’ordre fractionnaire de dimension nx × 1;
y : est le vecteur des sorties de dimension ny × 1;
α : est l’ordre de dérivation tel que 0 < α < 1 ;
A , B , C et D sont tous des matrices ou des vecteurs à éléments constants et de
dimension appropriée.
Remarque 1: Comme pour les représentations d'état d'ordre entier, les représentations d'état
d'ordre fractionnaire ne sont pas uniques. Les systèmes d'ordre fractionnaire réel
commensurable, permettent aussi une représentation dans l'espace d'état [9].
1
QD x Ax Bu
y Cx Du
(II.8)
II.4.3.1. Réalisation du modèle d’état fractionnaire :
II.4.3.1.1. Cas des systèmes commensurables :
Etant donné un système non entier mono variable linéaire invariant représente par sa fonction
de transfert G(s), donnée sous forme :
1
1
1 1 0
1 1 0
( )( )
( )m
mm
m m
n
n
b p b p b s bY sG s
U s p a p a s a
(II.9)
Pour calculer le modèle d’état qui lui correspond, on procède en trois étapes :

Chapitre II Les systèmes d'ordre fractionnaire
23
Etapes 1 : grâce au changement de variable 𝑠𝑎 , le modèle non entier G(s) peut être
remplacé par un modèle entier G(s) , qui s’écrit sous la forme :
1
1
1 1 0
1 1 0
( )( )
( )m
mm
m m
n
n
b p b p b s bY sG s
U s p a p a s a
(II.10)
Etapes 2 : calculer le modèle d’état entier correspond à ( )G s on peut obtenir touts les
formes particulière utilisées dans la théorie des systèmes d’ordre entier (forme
commandable, observable, jordan …..). On obtient, le modèle de la forme :
x Ax Bu
y Cx Du
(II.11)
Etapes 3 : remplaces dans le modèle d’état (II.13) la dérivée entière d’ordre un par la
dérivée non entière d’ordre α, ainsi le modèle d’état correspondant à la forme de transfert
(II.7) obtenu est de la forme [10].
D X Ax Bu
y Cx Du
(II.12)
La méthode reste applicable dans le cas du système commensurable multi-variables.
II4.3.1.2. Cas des systèmes d’ordre non entier généralisés :
Cas ou G(s) a un numérateur constant :
La fonction de transfert G(s) s’écrit sous la forme :
0
1 1 0
1* *
an an an
n
Y s Z s Y sG s b
U s U s Z s s a s a s a
(II.13)
On suppose, sans perte de généralité, que : 𝑎𝑛 > 𝑎𝑛−1 > ⋯ > 𝑎2 > 𝑎1.
L’équation différentielle associée à z(s)
u(s) est donnée par (la variable t est omise pour ne pas
sur charger les expressions).

Chapitre II Les systèmes d'ordre fractionnaire
24
1 1
1 1n na a a
nD Z a D Z a D Z u
(II.14)
Faisons le changement de variable pour obtenir le vecteur d’état :
1 1
2 1 2 1 1 2
1 2 1
1
2 1
3 2
1
( )
n n n
a a
a a a a a a
a a a z
n n
x z
x D x D z
x D x D D z D z
x D x D
(II.15)
1
2 1
3 2
1 1 2
1 2
2 3
3 4
( )n n n n n n n
a
a a
a a
a a a a a a a
n
D x x
D x x
D x x
D x D D D z
(II.16)
La dernière composant du dérivé du vecteur d’état D α x (D an x ) s’écrit en fonction
d’autre dérivé de z (t) et s’exprime comme suit :
1
0 1 1 2 2 1 1
n na a
n
n n n n
D x
a x a x a x a x u
(II.17)
La modèle d’état correspondant au modèle fonction de transfert est finalement donnée par :
D a x =
00⋮0
−a0
10⋮0
−a1
01⋮0
−a2
……⋮⋱…
00⋮1
−aN−1
x1
x2
x3
⋮xN
+
000⋮1
u (II. 18)
y = b0 0 0 … 0 0 x
Avec :
1 2, ......t
nx x x x (II.19)

Chapitre II Les systèmes d'ordre fractionnaire
25
11 2 1 ( )( )( )
1 2( ) , ........ n nt
a aa a aa
nD x D x D x D x (II.20)
De la même manière, on peut obtenir une forme similaire à la forme canonique
observable des systèmes entiers.
Cas ou le numérateur de G(s) a un polynôme :
La fonction de transfert G(s) supposée propre s’écrit dans ce cas sous la forme :
1 1( )
1 1 0
1
1 1 0
( )mm
m m
an an an
n
b s b s b s bG s
s a s a s a
(II.21)
Supposant que : 𝑎𝑛 > 𝑎𝑛−1 > ⋯ > 𝑎2 > 𝑎1 𝑒𝑡 βm > βm − 1 > ⋯ > β2
> β1
La méthode générale permettant de calculer la représentation d’état de la fonction de
transfert G(s) (II.21) est présentée dans ce que ce qui suit :
Soit le vecteur constitue de la concaténation des ordres non entiers 𝑎𝑖 𝑒𝑡 β𝑖 de G(s) :
1 2 3 2 1n m n m n ma a a a a a a (II.22)
Tel que : 𝑎 𝑛+𝑚 > 𝑎 𝑛+𝑚−1 > 𝑎 𝑛+𝑚−2 … . . 𝑎 3 > 𝑎 2 > 𝑎 1
L’ordre 𝑎𝑖 étant quelconque, par analogie à la section précédente pour le choix des
variables d’état, nous obtenant le modèle d’état suivant :
D a x =
00⋮0
−a 1
10⋮0
−a 2
01⋮0
−a 3
……⋮⋱…
00⋮1
−a n+m−1
x1
x2
x3
⋮xN
+
000⋮1
u (II. 23)
y = c 1 c 2 c 3 … c n+m−1 c n+m x
Avec :
12 11
1 2( ) , ,........ n m n ma aa a aa
n mD x D x D x D x
(II.23)
La fonction de transfert G(s) contient (m + 1) termes au numérateur et (n + 1)
termes au dénominateur. En tenant compte que le nombre de variable d’état du système non
entier est égal à la somme de la dimension du polynôme du numérateur et cette du polynôme

Chapitre II Les systèmes d'ordre fractionnaire
26
dénominateur, nous obtenons donc un vecteur d’état augmenté de dimension(n + m),
contrairement aux systèmes entiers, ou le nombre de variable de leur modèle d’état est fixé
par la dimension du polynôme du dénominateur de sa fonction de transfert.
Les éléments de la matrice A non nuls sont les coefficients correspondant à l’ordre du
dénominateur et les éléments non nuls du vecteur C sont ceux du numérateur de G(s) .
Il suffit donc de la sorte à faire ressortir(m)termes pour lesquels les ordres non entiers
correspondent à ceux des numérateurs de G(s) et n termes pour lesquels les ordres non
entiers correspondent à ceux du dénominateur de G(s). La procédure de sélection des
éléments 𝑎 𝑖 et 𝑐 𝑖 s’effectue comme suite :
a n+m = an
si a i = β j alors c i+1 = bj et a n+m−i = 0 i = 1, … n + m − 1
si a i = a j alors c i+1 = 0 et a n+m−i = an−j i = 1, … n + m − 1
(II. 25)
II.5.Commandabilité :
Le système d’ordre fractionnaire (II.26) est command able si et seulement si la matrice
de commandabilité [11].
10 .... NB AB A B (II.26)
(Où N est le nombre des états) est une matrice de rang plein.
II.5.1. Décomposition modale d’un système d’ordre fractionnaire :
Dans le cas entier, la décomposition modale d’un système s’effectue, soit par
décomposition en éléments simples si le système est décrit par une fonction de transfert de
la forme : 𝑌 𝑠
𝑈 𝑠 =
𝑁 𝑠
𝐷 𝑠 , soit par diagonalisation de la matrice d’évolution si le système est
décrit par une représentation d'état.
De manière analogue au cas entier, la décomposition modale d’un système d’ordre
fractionnaire réel commensurable s’effectue par la diagonalisation de la matrice
d’évolution. Un changement de base par transformation semblable du système permet en
effet d’obtenir une nouvelle formulation [12]:

Chapitre II Les systèmes d'ordre fractionnaire
27
1
Q
J J J
J J
D x Jx B u
y C x Du
(II.27)
Où 𝐽 est la matrice de Jordan contenant en sa diagonale l’ensemble des valeurs propres de la
matrice 𝐴 .
Mettant α = 1 / 𝑄 , alors, la sortie 𝑦(𝑡) peut être exprimée par :
𝑦 𝑡 = 𝔗−1 𝐶𝐽 𝑠𝛼𝐼 − 𝐽 −1𝐵𝐽 ∗ 𝑢 𝑡 + 𝐷𝑢(𝑡) (II.28)
Comme J est une matrice de Jordan, la matrice 𝑠𝛼 𝐼 − 𝐽 −1
peut être exprimée par :
𝑠𝛼𝐼 − 𝐽 −1 =
𝑠
𝛼 𝐼 − 𝐽𝑑1(𝜆1)
−1
⋱
𝑠𝛼𝐼 − 𝐽𝑑𝑙(𝜆𝑙)
−1
⋱
0
0 𝑠𝛼𝐼 − 𝐽𝑑𝑁(𝜆𝑁)
−1
(II.29)
Avec :
𝑠𝛼 𝐼 − 𝐽𝑑𝑙(𝜆𝑙)
−1=
𝑠𝛼 − 𝜆𝑙
−1 𝑠𝛼 − 𝜆𝑙 −2 ⋯ 𝑠𝛼 − 𝜆𝑙
−𝑑𝑙
𝑠𝛼 − 𝜆𝑙 −1 ⋮
⋱ 0 ⋱ 𝑠𝛼 − 𝜆𝑙
−2
𝑠𝛼 − 𝜆𝑙 −1
(II. 30)
Où λl sont les valeurs propres du système et dl est la multiplicité de la valeur propre λl .La
sortie y(t) est donc un vecteur dont les composantes sont définie par une combinaison linéaire
d’éléments, appelés modes propres du système de la forme :
𝔗−1 𝑠𝛼 − 𝜆𝑙 −𝑑𝑙 ∗ 𝑢 𝑡 (II. 31)

Chapitre II Les systèmes d'ordre fractionnaire
28
II.6. Conclusion :
Dans le deuxième chapitre nous avons introduit les déférentes définitions et propriété
de système d’ordre non entier. Ensuite nous avons rappelé les déférentes représentations de
système d’ordre fractionnaire : équation différentielle, fonction de transfert, représentation
d’état et les conditions de commandabilté,

Chapitre II Les systèmes d'ordre fractionnaire
29

Chapitre III Commande robuste d'ordre non entier
30
III.1. Introduction
Avec l’avènement des calculateurs numériques l’utilisation de commandes plus
évoluées tel que les commandes optimales, adaptatives, prédictives a été possible.
Un régulateur doit satisfaire aux objectifs généraux de la régulation ainsi qu’aux contraintes
liées au rejet des perturbations. Dans le cas d’un régulateur PI, et à cause du manque de degré
de liberté que nous impose ce dernier, seule la poursuite des références pour un point de
fonctionnement fixe pourra être envisagée.
En effet, un régulateur PI ne peut pas assurer, avec les seuls paramètres de correction KP et
KI, les objectifs de régulation en boucle fermée pour un système à l’origine d’ordre supérieur
a un Par conséquent, pour résoudre les problèmes de robustesse de la commande vectorielle
de la machine asynchrone (variation paramétrique), il est souhaitable d’aborder des
régulateurs plus avances, dont le nombre de paramètres est détermine en fonction de l’ordre
du système d’origine (machine double étoile ou double alimentée).
Dans ce chapitre, nous chercherons à répondre aux contraintes de poursuite et de régulation de
la machine a induction. Les objectifs que nous chercherons à atteindre concerneront la
robustesse en termes de stabilité et de performance. Dans le cas ou les paramètres du système
d’origine sont modifiés, la robustesse en termes de stabilité permet de conserver la stabilité du
système en boucle fermée, et la robustesse en termes de performances se mesure au niveau de
la rapidité et de la précision de poursuite des références.
Dans cette partie, nous présentons la structure de régulation RST en continu, dans laquelle les
objectifs de poursuite et de régulation serrent examinés à travers des tests de robustesse.
Figure. III.1 : Schéma bloc d’un système avec correcteur (Boucle fermée)

Chapitre III Commande robuste d'ordre non entier
31
III.2.Régulateur PID :
Le régulateur PID est une simple implémentation de retour d’information (Feedback).
Ila la capacité d'éliminer la compensation de l'état d'équilibre grâce à l'action intégrale, et il
peut anticiper le futur grâce à une action dérivée.
III.2.1.Régulateur PID analogique :
Le régulateur, dont la fonction de transfert est désignée par ( )cG s (Régler), est situé en
amont du système à régler) ( )G s
V(s)
Régulateur
W(s)
E(s) U(s) Y(s)
-
Figure. III.2:Schéma fonctionnel d’un système asservi mono-variable.
III.2.2.REGULATEUR PROPORTIONNELLE (P) :
Ce correcteur élémentaire est le correcteur de base, il agit principalement sur le gain
du système asservi et permet donc d’améliorer notablement la précision. La loi de commande
)(tu est proportionnelle à l’écart )(t :
))()(()()( tStCpktpktu
(III.1)
En introduit la transformation de Laplace :
pkp
pupC
)(
)()(
(III.2)
Nous avons vus que l’effet d’une augmentation du gain entraîne une diminution de
l’erreur statique, rend le système plus rapide mais augmente l’instabilité du système [13].
Ga (s)
Gc(s)

Chapitre III Commande robuste d'ordre non entier
32
III.2.3. Avantages et inconvénients de l’action proportionnelle:
On voit que le régulateur proportionnel assure une transmission instantanée du signal
d’erreur; dans ce sens, son action est relativement dynamique sa commande ne dépend pas du
passé, ni d’une tendance, mais simplement de ce qui se passe à l’instant présent.
Une limitation du régulateur proportionnel est son incapacité à annuler notamment
l’erreur statique (vis-à-vis d’une consigne constante ou d’une perturbation constante). En
effet, si la commande )(tu à appliquer au système doit être non nulle afin que celui-ci puisse
retrouver ou maintenir son état d’équilibre, il est dans le même temps nécessaire que l’erreur
soit non nulle puisque :
0)( tu , 0)( tk p 0)( t
. (III.3)
Cependant l’action proportionnelle est souvent suffisante pour régler plusieurs systèmes dans
l’industrie. Elle est simple à réaliser d’où son grand avantage [10].
III.2.3.1. Régulateur proportionnelle et intégrateur (PI) :
Un régulateur à actions Proportionnelle et Intégrale (PI) élabore une commande
conformément à la relation :
0
1( ) ( ) ( )
t
i
i
u t K t t dtT
(III.4)
La transmittance s’obtient facilement :
PTK
p
pupC
i
i
11
)(
)()(
(III.5)

Chapitre III Commande robuste d'ordre non entier
33
III.2.3.2. Regulateur proportionnelle et derivateur (PD) :
La loi de commande est de la forme [14]:
dt
tdTtKtu dd
)()()(
(III.6)
Prenons la transformation de Laplace de l’expression (I-22):
pTKp
pupC dd 1
)(
)()(
(III.7)
Ce correcteur produit une avance de phase, de 0 à 90°, avec 45° pourdT
1
Cette avance de phase a pour résultat d’augmenter la marge de phase.
il ne modifie pas la précision statique, car C (0) = 1.
le facteur de résonance est diminué, donc le coefficient d’amortissement du ordre
équivalent est augmenté, le dépassement diminué.
la rapidité de réponse du système ainsi corrigé est améliorée ; en effet, l’apparition
d’une erreur est traitée en fonction, non seulement de son amplitude mais aussi de sa
dérivée [15].
III.2.3.3. Régulateur proportionnelle intégrateur et dérivateur (PID) :
Le régulateur Proportionnel-Intégral-Dérivée est la combinaison des trois actions de
base P, I et D. Grâce au terme I, il permet l'annulation d'une erreur statique tout en autorisant
des performances de rapidité supérieures à un régulateur PI.
Loi de commande du régulateur PID:
t
d tTdttT
tKtu0
)()(1
)()( (III.8)

Chapitre III Commande robuste d'ordre non entier
34
Fonction de transfert du régulateur PID:
pT
pTTpTK
p
pUpC
i
dii
21
)()(
(III.9)
L’intérêt du correcteur PID est d’intégrer les effets positifs des trois correcteurs précédents.
La détermination des coefficientsPK , iT
dT du correcteur PID permet d’améliorer à la fois la
précision ( dT etPK ) la stabilité ( dT ) et la rapidité ( dT ,
PK ).Le réglage d’un PID est en
général assez complexe, des méthodes pratiques de réglages permettent d’obtenir des bons
résultats [13].
III.3. Méthode de synthèse des contrôleurs 𝐏𝐈𝐃 ( 𝛂 = 𝛃 = 𝟏)
En 1942, Ziegler et Nichols ont proposé deux approches heuristiques basées sur leur
expérience et quelques simulations pour ajuster rapidement les paramètres des régulateurs P,
PI et PID. La première méthode nécessite l’enregistrement de la réponse indicielle en boucle
ouverte, alors que la deuxième demande d’amener le système bouclé à sa limite de stabilité.
La deuxième méthode est basée sur la connaissance du point critique du processus.
Expérimentalement, on boucle le processus sur un simple régulateur proportionnel dont on
augmente le gain jusqu'à amener le système à osciller de manière permanente ; on se trouve
ainsi à la limite de stabilité. Après avoir relevé le gain critiquecrk du régulateur et la période
d’oscillation Tcr de la réponse, on peut calculer les paramètres du régulateur choisi à l’aide du
tableau III.1.
Type 𝑲𝒑 𝑻𝒊 𝑻𝒅
𝑷 𝟎. 𝟓𝑲𝒄𝒓
𝑷𝑰 𝟎. 𝟒𝑲𝒄𝒓 𝟎. 𝟖𝑻𝒄𝒓
𝑷𝑰𝑫 𝟎. 𝟔𝑲𝒄𝒓 𝟎. 𝟓𝑻𝒄𝒓 𝟎. 𝟏𝟐𝟓𝑻𝒄𝒓
Tableu. III.1 Paramètres du PID obtenus à partir du point critique (Ziegler-Nichols)
Chapitre III Commande robuste d'ordre non entier
35
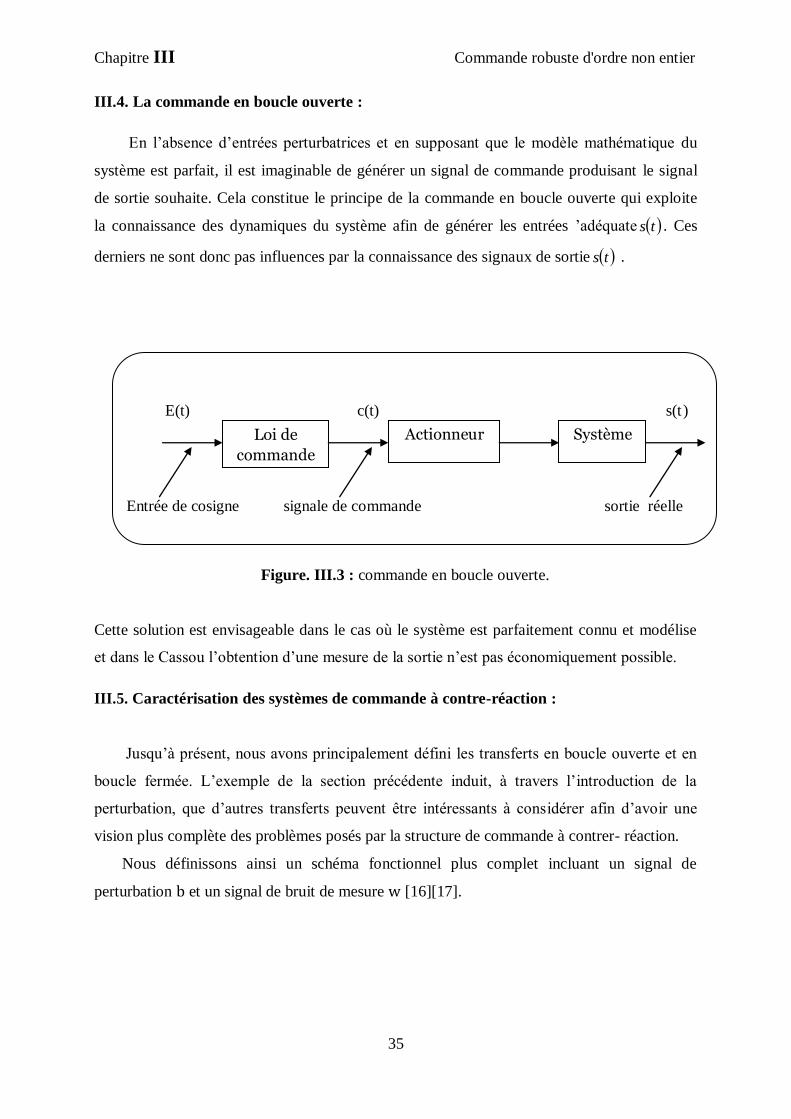
III.4. La commande en boucle ouverte :
En l’absence d’entrées perturbatrices et en supposant que le modèle mathématique du
système est parfait, il est imaginable de générer un signal de commande produisant le signal
de sortie souhaite. Cela constitue le principe de la commande en boucle ouverte qui exploite
la connaissance des dynamiques du système afin de générer les entrées ’adéquate ts . Ces
derniers ne sont donc pas influences par la connaissance des signaux de sortie ts .
E(t) c(t) s(t)
Entrée de cosigne signale de commande sortie réelle
Figure. III.3 : commande en boucle ouverte.
Cette solution est envisageable dans le cas où le système est parfaitement connu et modélise
et dans le Cassou l’obtention d’une mesure de la sortie n’est pas économiquement possible.
III.5. Caractérisation des systèmes de commande à contre-réaction :
Jusqu’à présent, nous avons principalement défini les transferts en boucle ouverte et en
boucle fermée. L’exemple de la section précédente induit, à travers l’introduction de la
perturbation, que d’autres transferts peuvent être intéressants à considérer afin d’avoir une
vision plus complète des problèmes posés par la structure de commande à contrer- réaction.
Nous définissons ainsi un schéma fonctionnel plus complet incluant un signal de
perturbation b et un signal de bruit de mesure w [16][17].
Loi de
commande
Actionneur Système

Chapitre III Commande robuste d'ordre non entier
36
Figure III.4 Schéma bloc avec perturbation et bruit
Ou :
r est le signal de référence que doit suivre la sortie
𝑦 est la sortie du système
u est la commande issue du correcteur K(p)
v est le signal de commande entrant réellement dans le système
b est le signal des perturbations
ϵ = r − (y + w) est le signal d’erreur
w est le signal des bruits de mesure
A partir de ce schéma fonctionnel, différents transferts entre les entrées et les signaux de
sortie intéressants vont être considérés.
III.5.1. Les fonctions de sensibilité :
Les relations algébriques élémentaires définies dans le schéma fonctionnel (III.10)
s’écrivent [18].
y p = G p ∗ v p ( III. 10)
v p = b p + u p ( III. 11)
u p = K p ∗ ε p ( III. 12)
ε p = r p − w p − y p ( III. 13)
y
w
b
r + ϵ
v u
+
+
K(p) G(p)
Chapitre III Commande robuste d'ordre non entier
37
Cela permet de déterminer les relations en boucle fermée entre la sortie exogène et les entrées
exogènes :
y p = (1 + G p K p )−1G p b p + (1 + G p K p )−1G p K p r p − w p (III. 14)
S(p) T(p)
Définition : (Sensibilité et sensibilité complémentaire)
Les fonctions de transfert S(p) et T(p) sont appelées respectivement fonction de
sensibilité et fonction de sensibilité complémentaire.
La fonction de sensibilité complémentaire est en fait la fonction de transfert en boucle
fermée usuelle.
S p =1
1 + G p K(p) T p =
G p K(p)
1 + G p K(p) ( III. 15)
Il est à noter que 𝑇 𝑝 = 𝐺 𝑝 𝐾 𝑝 𝑆(𝑝) et donc :
S p + T p = 1 ( III. 16)
Un signal permettant d’analyser la précision du système est celui de l’erreur ε(p) :
ε p = S p r p − S p G p b p + T p w p ( III. 17)
Afin de conserver un certain contrôle sur l’amplitude de la commande délivrée et de la
commande reçue, il est également nécessaire de connaitre les transferts de ces commandes
aux entrées exogènes :
u p = K p S p r p − w p − T p b p ( III. 18)
v p = K p S p r p − w p + S p b p ( III. 19)
Le schéma fonctionnel précédent fait donc apparaitre quatre fonctions de transfert
importantes appelées fonctions de sensibilité :
S p S p G p T p S p K(p)
Ou :

Chapitre III Commande robuste d'ordre non entier
38
* 𝐒(𝐩) représente le transfert entre la référence et l’erreur et entre la perturbation et la
commande délivrée.
* 𝐓(𝐩) représente l’influence des bruits de mesure sur la sortie et l’erreur et l’influence de la
perturbation sur la commande délivrée.
* 𝐒(𝐩)𝐆(𝐩) représente l’influence de la perturbation sur la sortie et l’erreur.
* 𝐒 𝐩 𝐊(𝐩) représente l’influence de la référence et des bruits de mesure sur les commandes.
Objectifs de commande :
Compte tenu des relations établies précédemment et de l’analyse qui les suit, la synthèse
du correcteur K doit obéir aux différents objectifs suivants :
* Un bon suivi du signal de référence implique une fonction de sensibilité S(p) faible en
amplitude.
* Une bonne rejection des perturbations sera obtenue pour S(p)G(p) faible.
* Les bruits de mesure seront atténués si l’amplitude de T(p) est faible sur la plage de
fréquence concernée.
* L’effort de commande est faible si l’amplitude de S(p)K(p) et de T(p) est faible.
* La commande délivrée au système est faible si S(p) et S(p)K(p) sont d’amplitude faible.
Ces objectifs de commande sont contradictoires et devront faire l’objet de compromis
lors de la synthèse du système de commande [17].
III.6. Modelage des fonctions de sensibilité:
Une stratégie différente de celle du Loopshaping est de définir les spécifications
directement sur les fonctions de sensibilité S et T et de reformuler le problème de synthèse en
un problème d’optimisation. En effet, la sensibilité S est en particulier un bon indicateur des
performances du système.
Critères de performance On définit deux indicateurs de performance à partir de la norme
H∞ sur les fonctions de sensibilité et sensibilité complémentaires [17].
supS
w
M s S jw
(III.20)
sup ( )Tw
M T T jw
(III.21)

Chapitre III Commande robuste d'ordre non entier
39
Ms et MT correspondent à un pic de la courbe de gain de chacun des transferts considérés.
Des valeurs de Ms et de MT grands indiquent une faible performance du système ainsi qu’une
faible robustesse vis à vis des perturbations pouvant l’affecter. Des valeurs typiques correctes
sont données par :
2(6 )SM db (III.23)
1.25(2 )TM db
(III.24)
Ces deux grandeurs ne sont évidemment pas indépendantes et doivent vérifier :
S − T < S + T = 1 ∀ w (III. 25)
Remarque :
La marge de module définie dans le chapitre précédent se définit également comme,
∆M =1
Ms (III. 26)
Un lien entre ces grandeurs et la marge de phase et de gain peut également être établi.
KG ≥ Ms
Ms − 1M∅ ≥ 2 sin−1
1
2Ms ≥
1
Msrad (III. 27)
KG ≥ 1 +1
MTM∅ ≥ 2 sin−1
1
2MT >
1
MTrad (III. 28)
III.6.1.Spécifications de performance en sensibilité
Elles sont données sous la forme suivante :
1- une bande passante minimale wB à −3 dB
S(jwB ) = 0.707 (III. 29)
2- une erreur maximale de position en régime permanent A
3- le modelage de S sur certaines plages de fréquences
4- l’amplitude maximale du module de S :
S ∞ < Ms (III. 30)
Remarque :
La dernière spécification permet d’éviter l’amplification du bruit aux hautes fréquences et
introduit une marge de robustesse. Un choix usuel est Ms = 2 .

Chapitre III Commande robuste d'ordre non entier
40
L’ensemble de ces spécifications peut être traduit en une spécification unique faisant
intervenir une borne supérieure 1
w p (jw ) sur l’amplitude de S.
∀ w S jw <1
wp jw ⇔ wp jw S jw < 1 (III. 31)
wp𝑆 ∞
< 1 (III. 32)
Définition :(Fonction de pondération)
wp(p) Est appelée fonction de pondération de S .
La spécification de pondération signifie donc que la norme H∞ (la valeur maximale du
gain) de S pondérée par la fonction wp(p) doit être inférieure à 1. L’interprétation graphique
de la condition sur la sensibilité s’obtient en montrant que :
wpS ∞
< 1 ⇔ ∀ w wp jw < L jw + 1 (III. 33)
Cela signifie donc que le lieu de transfert en boucle ouverte L(jw) tracé dans le plan de
Nyquist n’entre pas dans le disque de centre (−1, 0) et de rayon wp(jw) .
Figure III.5. plan de Nyquist
Un choix classique pour la fonction de pondération est :
wp p =
pM + wB
p + wBA (III. 34)

Chapitre III Commande robuste d'ordre non entier
41
Le tracé asymptotique dans Bode de 1
w p p est donné par :
Figure III.6. Fonction de pondération wp
La borne supérieure de |S|, 1
w p vérifie :
- aux basses fréquences, elle est égale à A ≤ 1 (action intégrale)
- aux hautes fréquences, elle est égale à M ≥ 1
- wB est la pulsation de coupure à −3 dB
Remarque :
Afin d’améliorer les performances, on choisit parfois une fonction de pondération plus
complexe :
wp p =(P M
12 + wB )2
(P + wBA1
2 )2 (III. 35)
Exemple :
On reprend l’exemple utilisé pour le loopshaping de la section suivante. Après
loopshaping, la boucle ouverte vaut :
L p =0.15(−2p + 1)
p(2p + 1)(0.33p + 1) (III. 36)
Un choix de filtre de pondération cohérent avec les spécifications imposées est donné par :
M = 1.8 et A = 0 wB = 0.05 rad/S

Chapitre III Commande robuste d'ordre non entier
42
Le choix de (A = 0) correspond bien à la nécessité d’inclure une action intégrale dans la
boucle pour annuler l’erreur en régime permanent en réponse à un échelon de position.
Il est à noter sur la figure que la pulsation à partir de laquelle S~1 (le correcteur n’est
plus effectif) est 1 rad/s [17].
Figure III.7. Fonction de pondération
III.7.Régulateur PID Fractionnaire :
Le correcteur d’ordre fractionnaire PI D ne généralisation du correcteur PID classique a été
proposée par Podlubny en 1999 [9]. Sa fonction de transfert est donnée par [19]:
IP D
KC s K K s
s
(II.37)
où PK , IK et DK sont des nombres réel et et sont des nombres réels positives. De
l’équation (II.37), on note que pour 1 le correcteur d’ordre fractionnaire PI D
devient le correcteur PID classique. Figure II.8 montre la disposition du correcteur d’ordre
fractionnaire PI D m dans le plan , .
10-3
10-2
10-1
100
101
-50
-40
-30
-20
-10
0
10
Magnitu
de (
dB
)
Bode Diagram
Frequency (rad/sec)
Chapitre III Commande robuste d'ordre non entier
43
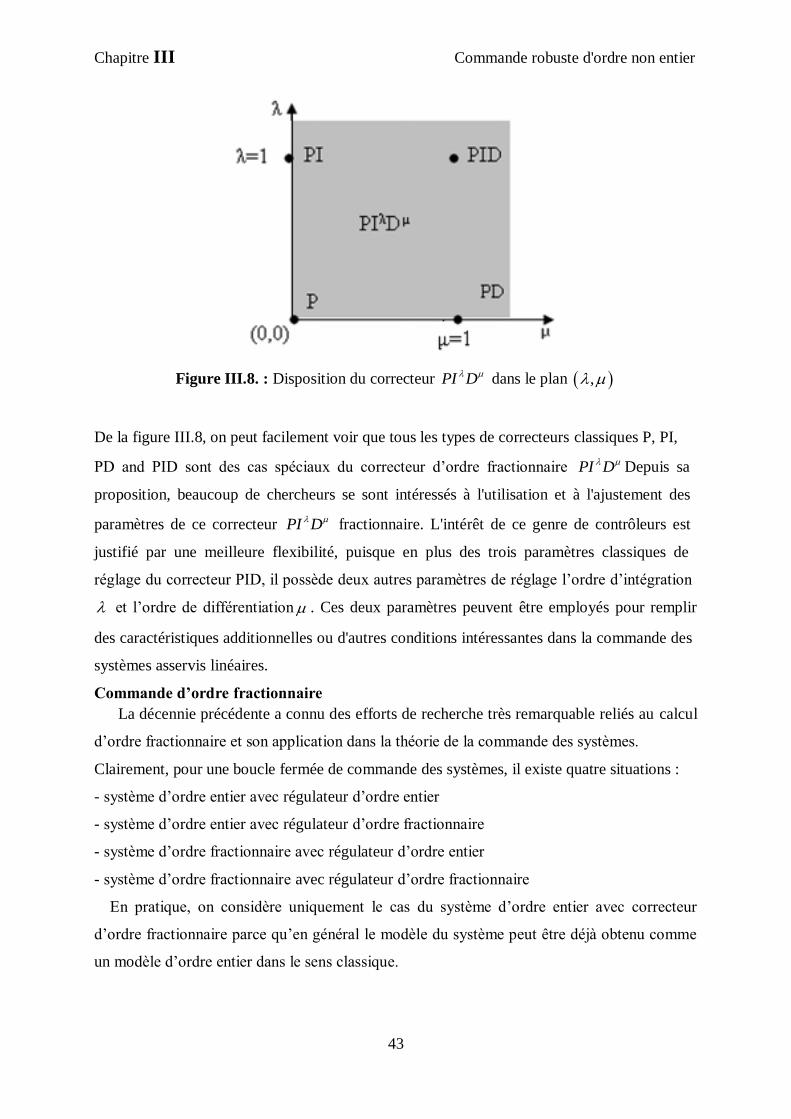
Figure III.8. : Disposition du correcteur PI D dans le plan ,
De la figure III.8, on peut facilement voir que tous les types de correcteurs classiques P, PI,
PD and PID sont des cas spéciaux du correcteur d’ordre fractionnaire PI D Depuis sa
proposition, beaucoup de chercheurs se sont intéressés à l'utilisation et à l'ajustement des
paramètres de ce correcteur PI D fractionnaire. L'intérêt de ce genre de contrôleurs est
justifié par une meilleure flexibilité, puisque en plus des trois paramètres classiques de
réglage du correcteur PID, il possède deux autres paramètres de réglage l’ordre d’intégration
et l’ordre de différentiation . Ces deux paramètres peuvent être employés pour remplir
des caractéristiques additionnelles ou d'autres conditions intéressantes dans la commande des
systèmes asservis linéaires.
Commande d’ordre fractionnaire
La décennie précédente a connu des efforts de recherche très remarquable reliés au calcul
d’ordre fractionnaire et son application dans la théorie de la commande des systèmes.
Clairement, pour une boucle fermée de commande des systèmes, il existe quatre situations :
- système d’ordre entier avec régulateur d’ordre entier
- système d’ordre entier avec régulateur d’ordre fractionnaire
- système d’ordre fractionnaire avec régulateur d’ordre entier
- système d’ordre fractionnaire avec régulateur d’ordre fractionnaire
En pratique, on considère uniquement le cas du système d’ordre entier avec correcteur
d’ordre fractionnaire parce qu’en général le modèle du système peut être déjà obtenu comme
un modèle d’ordre entier dans le sens classique.
Chapitre III Commande robuste d'ordre non entier
44
Du point de vue ingénierie, la signification de commande d’ordre fractionnaire est que c'est
une généralisation de la théorie de commande d’ordre entier classique qui pourrait mener à
une modélisation plus adéquate et des performances de commande plus robuste. En effet,
l’intérêt majeur de la commande d’ordre fractionnaire est l’amélioration ou l’optimisation des
performances en utilisant les concepts de la théorie des dérivées, intégrales et des systèmes
d’ordre fractionnaire. La première tentative d’appliquer le calcul d’ordre fractionnaire pour la
commande des systèmes peut être trouvée dans . Du point de vue historique, il existe dans
la littérature quelques structures principales de commande d’ordre fractionnaire.
III.7.1. Conception d’une commande PIα
Dβ
d’ordre fractionnaire :
La commande PID est la technique la plus utilisée actuellement dans la commande des
processus industriels. Sa fonction de transfert est bien connue sous la forme :
ip d
U( s ) KC( s ) K K s
E( s ) s (III-38)
Où 𝐸(𝑆)représentent l’erreur et 𝑈(𝑆)la commande.
Avait proposé une généralisation de cette commande, appelée commande PIα
Dβ
d’ordre
fractionnaire définie par sa fonction de transfert donnée sous la forme (III.37)
L’équation différentiel le correspondante à la fonction de transfert , est donnée par :
p i du( t ) K e( t ) K D e( t ) K D e( t ) (III-39)
Comme il est montré sur la figure (III.1), le PIα
Dβ
fractionnaire généralise le PID
conventionnel et l’étend du point au plan. Cette extension donne plus de flexibilité dans la
conception des commandes PID.
Chapitre III Commande robuste d'ordre non entier
45
III.8. Conclusion:
Les trois actions du régulateur PID permettent de commander le moteur électrique à
courant continu, tout en garantissant une annulation de l’erreur permanente de la sortie
régulée, vis-à-vis d’échelons en entrée de consigne. Cette propriété de précision est due à la
présence d’une action intégrale. L’ajout d’une action dérivée permet d’augmenter la stabilité
du moteur électrique, et donc de diminuer le dépassement de la réponse indicielle. L’ajout de
cette dérivée n’est pas systématique et dépend des propriétés du moteur électrique, du cahier
de charge imposé (en terme de dépassement), dans certains cas il suffit l’utilisation d’un
régulateur PI uniquement, comme l’asservissement en vitesse du moteur électrique. La
réalisation de l’action dérivée est préférentiellement réalisée sur la mesure, afin d’éviter la
saturation de la commande.
Un des intérêts du régulateur PID, qui explique sa popularité dans le milieu industriel, est sans
conteste la possibilité de le régler sans connaissance approfondie du système. En effet, on
dispose de méthodes empiriques, fondées uniquement sur la réponse temporelle du système,
selon une procédure expérimentale, comme la méthode d’oscillation de Ziegler-Nicholas
utilisée dans la section (III.3.1.2), permettant dans la majorité des cas d’aboutir à des
performances acceptable.

46

Chapitre IV Commande Robuste d’un Moteur Synchrone à Aimant Permanent
47
IV.1. Introduction:
Introduction sur la commande robuste d’une MSAP
Ce chapitre propose contrôleur PID fractionnaire de moteur synchrone aimant
permanent. Dans le processus de conception du contrôleur de sensibilité mixte robuste, la
sélection des paramètres de la fonction de pondération est généralement basée sur l'expérience
du concepteur, en utilisant la méthode d'essai et d'erreur [26]. Afin d'améliorer le contrôle de
la qualité du système MSAP, non linéaire, solide système de couplage du contrôleur robuste
de MSAP a été conçu. L'idée clé derrière la méthode proposée est la formulation du problème
de conception PID d’ordre fractionnaire pour le système MSAP comme un problème
d'optimisation avec la fonction objective incluant intégrale du temps pondéré erreur absolue,
ce qui permet de satisfaire certaines spécifications de performance tels que: un bon suivi du
point de consigne, une satisfaisante charger le rejet des perturbations.
IV.2. Le modèle mathématique du moteur synchrone à aimant permanent
en tension dans le système de coordonnées dq tournant
La dynamique du système de la moteur synchrone à aimant permanent est décrite
par les équations différentielles suivantes [27] :
Les équations des composantes du vecteur de tension:
1
1
dd q
q
q d
dU Ri
dt
dU Ri
dt
(IV.1)
Les équations des composantes du vecteur flux:
d d d
q q q
L i
L i
(IV.2)
L’équation du couple électromagnétique :
3
2e d q q dT P i i (IV.3)

Chapitre IV Commande Robuste d’un Moteur Synchrone à Aimant Permanent
48
La vitesse du moteur peut être exprimé en tant que :
1
M e M t
M
T B TJ
1, MP (IV.4)
Selon les équations (IV.1) - (IV.4), on peut obtenir le schéma fonctionnel courant de
commande de boucle de moteur synchrone à aimant permanent, qui est représenté sur la
fonction de transfert du système.
M
q
sG s
I s
(IV.5)
Avec:
3 2 ( ( ) )T
T p T i
p n p n i n K i n
K K s K K
JLs BL J R K K s B R K K K K J K K s K K B
3
2TK P , i
ACR p
KK K
s , n iK R ,
Figure IV.1. : Boucle de régulation du courant en quadrature-axe de la MSAP
Le diagramme de simulation de l'ensemble du système de commande de moteur est représenté
sur la Figure IV.2.
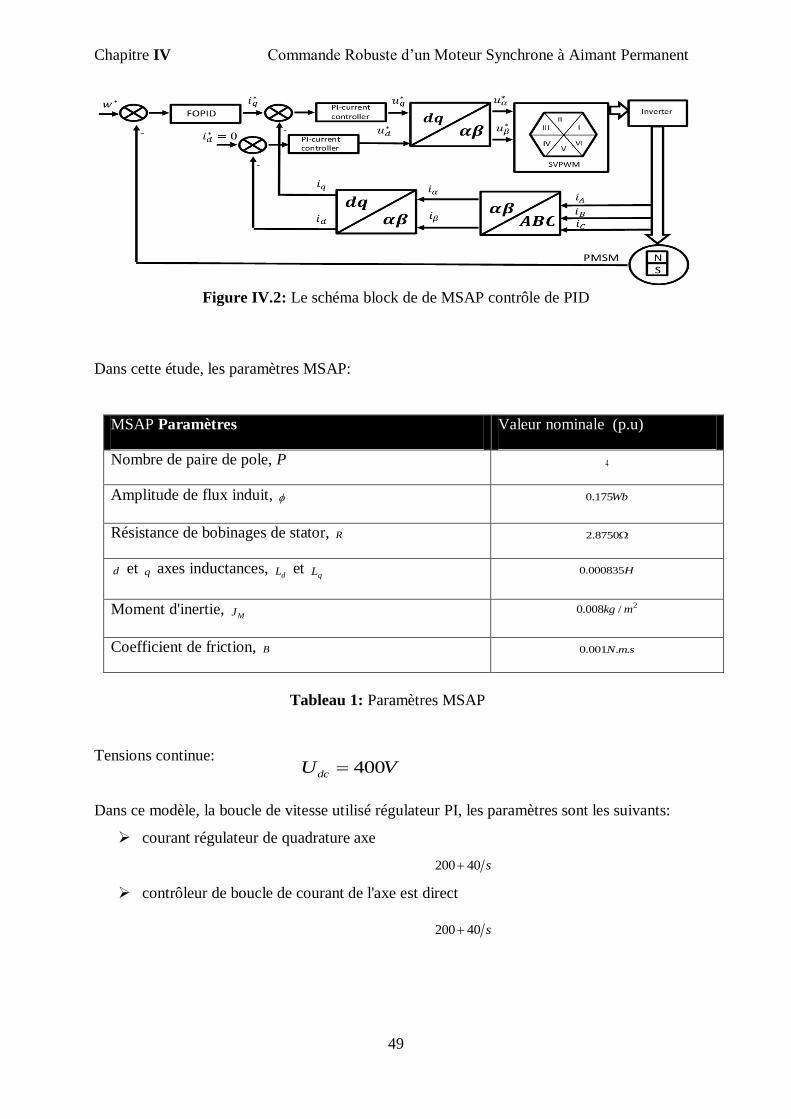
Chapitre IV Commande Robuste d’un Moteur Synchrone à Aimant Permanent
49
Figure IV.2: Le schéma block de de MSAP contrôle de PID
Dans cette étude, les paramètres MSAP:
MSAP Paramètres Valeur nominale (p.u)
Nombre de paire de pole, P 4
Amplitude de flux induit, 0.175Wb
Résistance de bobinages de stator, R 2.8750
d et q axes inductances, dL et
qL 0.000835H
Moment d'inertie, MJ 20.008 /kg m
Coefficient de friction, B 0.001 . .N m s
Tableau 1: Paramètres MSAP
Tensions continue:
Dans ce modèle, la boucle de vitesse utilisé régulateur PI, les paramètres sont les suivants:
courant régulateur de quadrature axe
contrôleur de boucle de courant de l'axe est direct
200 40 s
200 40 s
400dcU V

Chapitre IV Commande Robuste d’un Moteur Synchrone à Aimant Permanent
50
IV.3. Résultats de Simulation
Figure IV.3. Amélioration de la marge de robustesse en performances du système bouclé
Dans l'environnement MATLAB / Simulink, nous utilisons l'espace contrôle PID d’ordre
fractionnaire établi du système MSAP combine la conception de la simulation du contrôleur
de sensibilité de robustesse mélangée. Nous utilisons l'espace système de contrôle PID établie
de MSAP combinant avec la conception du contrôleur de sensibilité mixte robuste pour
simuler.
La figure. IV 3 compare entre les valeurs singulières maximales des matrices de pondération
inverse et les matrices de sensibilité .Le chiffre entre 0,5 compare les valeurs singulières
maximales des matrices de pondération inverses et des matrices de sensibilité
complémentaires.
10-5
100
105
10-12
10-10
10-8
10-6
10-4
10-2
100
Fréquence[rad/sec]
Magnitude
Comparison entre(1/W1(s) et S(s))
S(s) sensibilité directe
1/W1

Chapitre IV Commande Robuste d’un Moteur Synchrone à Aimant Permanent
51
Figure IV.4. Amélioration de la marge de Robustesse de stabilité du système bouclé
10-5
100
105
10-3
10-2
10-1
100
101
Fréquence[rad/sec]
max S
VD
Comparison entre(1/W3(s) et T(s))
T(s) sensibilité complimentaire
1/W3(s)

Chapitre IV Commande Robuste d’un Moteur Synchrone à Aimant Permanent
52
Pour confirmer ces résultats dans le domaine temporel, les blocs de la Simulink de Matlab
sont utilisés afin de boucle en forme de système perturbé par un PID d’ordre fractionnaire.
Figure.IV.5. est la courbe de réponse du système que la vitesse initiale donnée de 400 tr / min
à 700 tr / min dans 0.004s.
Figure IV .5. La vitesse en fonction de nombre d’interaction
0 2 4 6 8 10 12 14 16 18
x 104
0
100
200
300
400
500
600
700
temps[sec]
vitesse[t
r/m
in]
Comparison entre la vitesse réel (we) et la consigne)
Consigne
Vitesse réel we
Chapitre IV Commande Robuste d’un Moteur Synchrone à Aimant Permanent
53
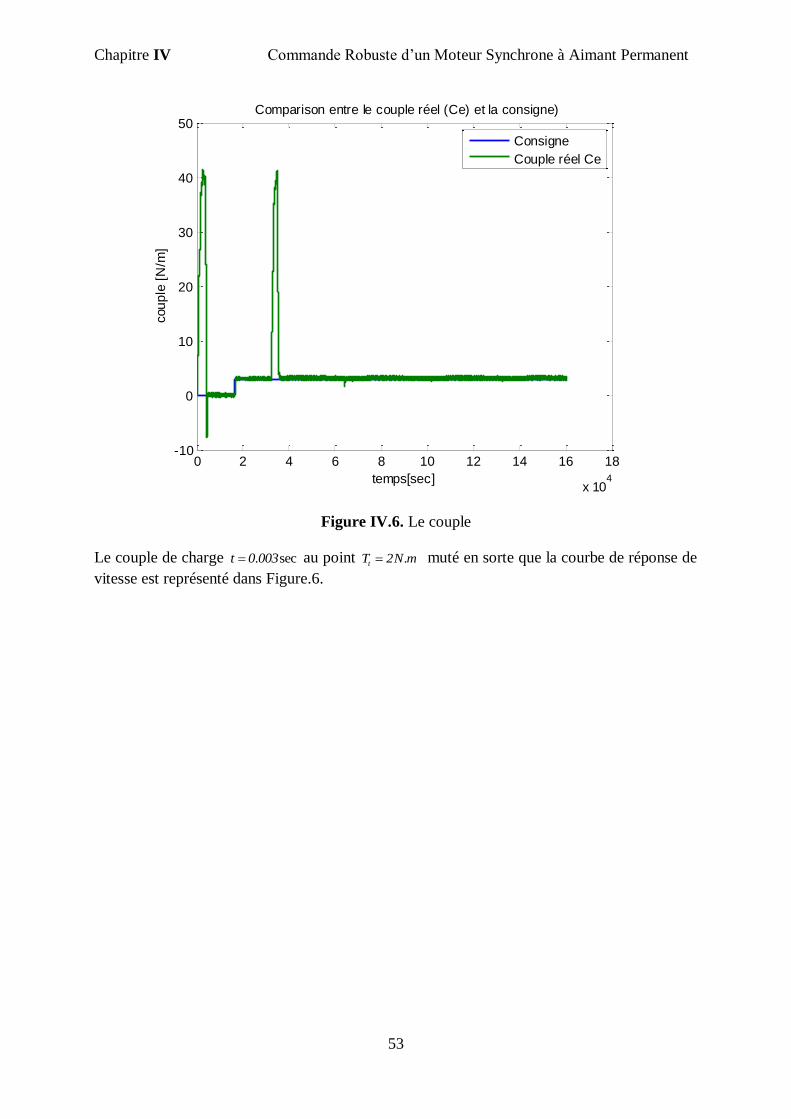
Figure IV.6. Le couple
Le couple de charge . sect 0 003 au point .tT 2N m muté en sorte que la courbe de réponse de
vitesse est représenté dans Figure.6.
0 2 4 6 8 10 12 14 16 18
x 104
-10
0
10
20
30
40
50
temps[sec]
cou
ple
[N
/m]
Comparison entre le couple réel (Ce) et la consigne)
Consigne
Couple réel Ce

Chapitre IV Commande Robuste d’un Moteur Synchrone à Aimant Permanent
54
Figure IV.7. Triphasé courant
0 1 2 3 4 5 6
x 104
-60
-50
-40
-30
-20
-10
0
10
20
30
40
temps[sec]
coura
nt
les courants I(a),I(b),I(c)
i(a)
i(b)
I(c)

Chapitre IV Commande Robuste d’un Moteur Synchrone à Aimant Permanent
55
IV.4.Conclusion
Ce chapitre a établi un modèle d'espace de contrôle de moteur synchrone de aimant
permanent; le contrôleur de PID d’ordre fractionnaire robuste est conçue en fonction de la
fonction de transfert d'axe en quadrature boucle de courant. Dans ce travail, l'algorithme F
minimax a été utilisé pour trouver les paramètres optimaux du contrôleur PID d’ordre
fractionnaire qui réduit les erreurs (ITAE).
Le système de commande PID d’ordre fractionnaire présentent une bonne fréquence et le
temps de réponse de domaine par comparaison avec le contrôleur PID d’ordre fractionnaire.
Les résultats des simulations montrent que le système de contrôle a une excellente
performance dynamique, il peut être effectivement supprimé les effets indésirables par les
perturbations de charge.
Le contrôleur conçu assure la performance robuste de MSAP système spatial.

Conclusion général

Conclusion général
Dans notre projet, nous avons présenté les démarches de calcul d’un contrôleur robuste.
Ce contrôleur prend la structure de trois actions en cascade qui sont : l’action proportionnelle,
intégrale et dérivée. Le contrôleur est synthétisé par la méthode des gains principaux dont
l’objectif est d’assurer d’une part une bonne dynamique de poursuite de consigne, et d’une
autre part, d’une bonne dynamique de régulation. Les paramètres de ce contrôleur sont
obtenus pour la première étape par un choix à priori fourni par l’utilisateur, nous avons
présenté pour ce cas que cette méthode est basée sur le hasard de choix et prend un temps de
tentative important. Pour la deuxième étape nous avons proposé une technique permettant de
paliers ces inconvénients, cette proposition généralise la méthode de commande proposée
pour n’importe quel système. La méthode de commande proposée est validée sur un moteur
synchrone à aimant permanent et les résultats obtenus sont très encourageants.
Enfin, comme suite à ce travail est d’introduire des pondérations d’ordre non entier dans
le critère de la sensibilité mixte afin d’améliorer le compromis de robustesse d’un système
bouclé par un contrôleur fractionnaire.

Références bibliographiques
59
Références bibliographiques
[1] G. LACOMBE "Définition et Réalisation d’une Nouvelle Génération de Logiciels pour la
Conception des Moteurs Futurs" ; Thèse de doctorat, Institut National Polytechnique de
Grenoble, 2007.
[2] A. Ameur," Commande sans capteur de vitesse par DTC d’une machine synchrone à
aimants permanents dotée d’un observateur d’ordre complet à modes glissants", Thèse de
magistère, Université de Batna, 2005.
[3] M. Ezzat," Commande non linéaire sans capteur de la machine synchrone à aimants
permanents ", Thèse de Doctorat, École centrale de Nantes, 2011.
[4] Ameur, A. "Commande sans capteur de vitesse par DTC d’une machine synchrone à
aimants doté d’un observateur d’ordre complet à mode glissant". Thèse de magistère en
électrotechnique université de Batna, 2003
[5] Bouchereb, C. "Contrôle direct du couple des machines synchrones".
Thèse de magistère en électrotechnique, université de Batna, 2005.
[6] F. Bouchafaa," Etude et Commande de différentes Cascades à Onduleur à Neuf
Niveaux à Structure NPC. Application à la conduite d’une MSAP", Thèse de doctorat,
Ecole nationale polytechnique, El-Harrach, 2006.
[7] R. GHOSN, « Contrôle Vectoriel de la Machine Asynchrone à Rotor Bobiné à
Double Alimentation», Thèse de Doctorat – ENSEEIHT – Institut National
Polytechnique de Toulouse,Octobre 2001.
[8] Oustaloup, « La commande CORNE. Du séculaire au multi variables », Editions
HARMES, Paris, 1995.
[9] I. Podlubny, « Fractional différential equations », Academic press. San Diago,
1999.
[10] T. Djamah, « Identification des systèmes par des modèles d’ordre fractionnaire
». Thèse de doctorat , UMMTO, Tizi-Ouzou, 2009.
[11]: B. M. Vinagre, Module de control de systeme dinámicos caraterizados por
ecuaciones integro-diferenciales de orden fractional, PHD thesis, Universidad
Nacional de Educación a Distancia, Madrid, 2001.
[12]: A. Djouambi, thèse de Doctorat. Contribution à la commande CRONE
Références bibliographiques
60
Université de Constantine. Algérie, 2008.
[13] http://perso.menara.ma/~bennisnajib/correcteur.htm
[9] http://perso.orange.fr/michel.hubin/physique/elec/chap_asserv2.htm.
[14] Professeur : Franck Besnard - '' Les systèmes linéaires continus et invariants '',
SITES D’INTERNET :
[15] HUBERT EGON et MICHEL MARIE et PASCAL POREE " Traitement du signal et
automatique, partie I : Traitement du signal et asservissement analogique ", 2000.
[16] J.C. Truxal, « Automatic Feedback Control System Synthesis ». Mc Graw-Hill
Electrical and Electronic Engineering Séries. Mc Graw-Hill, New York, USA, 1955.
[17] D.Arzelier, « Representation et analyse des systems linèaires », Notes de cours Toulouse
2010.
[18] P. Naslin, « Technologie et calcul pratique des sysmes asservis ». Dunod, Paris, France,
1968.
[19] Podlubny,I., ’ Fractional order systems and PIλDμcontrollers’, IEEE Transactions on
automatic control, Vol. 44, No. 1, pp 208-214, 1999
[20] ZANG Huai-quan, WANG Yuan-yuan. Robust H∞ control for electric power steering
based on genetic algorithm. Control Theory & Applications; 2012; 29(4), pp. 544-548.
[21] Hany M. H., Torque ripple minimization of permanent magnet synchronous motor using
digital observer controller, Energy Conversion and Management, Elsevier; 2010; Vol. 51, pp.
98–104.



RESUME Dans ce mémoire, une méthode de synthèse de contrôleur robuste Fractionnaire d' Ordre PID basé sur
Fminimax algorithme d'optimisation est proposé de contrôler la vitesse de moteur synchrone a l'aimant
permanent
Afin d'obtenir une bonne performance dynamique, la sélection de la fonction de pondération utilise
l'algorithme génétique pour optimiser dans le processus de conception du PID classique. Les performances
obtenues sont comparées à celles données par un contrôleur PID classique dans le domaine des fréquences et
dans le temps.
Abstract In this work, a synthesis method of robust Fractional Order PID controller based on Fmini-max optimization
algorithm is proposed to control the speed motor of permanent magnet synchronous motor. Space Vector
Pulse. In order to obtain a good dynamic performance, the selection of the weighting function uses genetic
algorithm to optimize in the process of designing the robust PID. The performances obtained are compared
with those given by an controller using in the frequency domain and in the time







