Download - Izvještaj LV1

SVEUČILIŠTE JOSIPA JURJA STROSSMAYERA U OSIJEKUELEKTROTEHNIČKI FAKULTET
Diplomski studij
Laboratorijska vježba broj 1:
Projektiranje parametara regulatora u sustavu regulacije brzine vrtnje istosmjernog motora
Izvještaj
Kolegij Električni pogoni
Student: Davor Junušić, br. indeksa D-748Grupa: DE2, (Grupa parametara 6)
Nastavnik: Vedrana Jerković, dipl.ing. Osijek, travanj 2014.

1. PRVI DIO VJEŽBE:
Skokovita promjena napona armature
Slika 1: Blok dijagram nezavisno uzbuđenog istosmjernog motora sa skokovitom promjenom
Slika 2: Skokovita promjena napona armature
Slika 3: Struja armature za skokovitu promjenu napona armature
Slika 3: Brzina vrtnje za skokovitu promjenu napona armature
Na slikama 3 i 4 možemo vidjeti struju armature i brzinu vrtnje istosmjernog nezavisno
uzbuđenog motora na skokovitu promjenu napona armature (slika 2). Brzina vrtnje je
proporcionalna struji te se može vidjeti da dostiže svoju najveću vrijednost u trenutku kada
struja armature pada na nulu, te preko relacije (1-1) može se izračunati ta vrijednost. Uz
konstantno opterećenje, a u našem slučaju je prazni hod, brzina vrtnje se mijenja približno
proporcionalno sa naponom armature što se može vidjeti iz relacije:
ω=U a
ke (1-1)
Pri skokovitom porastu napona na zavojnici ne može doći do trenutne promjene struje na
zavojnici, pa ne može doći ni do trenutne promjene brzine vrtnje. Odziv brzine vrtnje je
aperiodski što se može potvrditi iz uvjeta Tem
T a
>4. Pri pokretanju motora će biti velika struja
pokretanja, što može uzrokovati oštećenje stroja.
Linearna promjena napona armature

Slika 4: Blok dijagram nezavisno uzbuđenog istosmjernog motora sa linearno rastućom promjenom napona armature
Slika 5: Linearna promjena napona armature
Slika 6: Struja armature za linearnu promjenu napona armature
Slika 7: Brzina vrtnje za linearnu promjenu napona armature

Korištenjem tzv. rampe postiže se smanjenje velikog nadvišenja struje odnosno smanjuje se
skok struje armature. Tako struja poprima manje vrijednosti nego u prethodnom slučaju.
Ustaljeno stanje ovisi o vremenu rampe i u ovom slučaju iznosi t z=5 s. Iz slike 7 može se
vidjeti da se sa linearnim povećanjem napona armature linearno povećava i brzina vrtnje. U
trenutku t z napona armature poprima konstantnu vrijednost kao i brzina vrtnje, dok struja
počinje padati na nulu. I u jednom i u drugom slučaju brzina vrtnje je nešto viša od nazivne.
2. DRUGI DIO VJEŽBE
Parametriranje regulatora struje pomoću tehničkog optimuma
Pretpostavka za provedbu sinteze regulatora prema tehničkom optimumu da je proces bez
astatizma. Pri sintezi prema T. O. važno je i da imamo jednu dominantnu vremensku
konstantu, te više manjih nedominantnih vremenskih konstanti. Tehničkim optimumom
postižemo brži i približno aperiodski odziv. Svodimo nadvišenje na svega oko 5%. Za
regulaciju struje armature koristit ćemo PI regulator.
Slika 8: Zatvoreni regulacijski krug struje armature
Prijenosna funkcija regulatora struje:
GRi=1+sT Ri
sT Ii
Parametri regulatora struje se određuju prema:
T Ri=T a - poništavanje dominantne vremenske konstante
T Σ i=τ+T fi - suma nedominantnih vremenskih konstanti
KSi=K i∗1
Ra
∗K iamj∗K fi - pojačanje sustava

T Ii=2∗K Si∗T Σ i - vremenska konstanta regulatora
Slika 9: Struja armature
Iz slike 9 vidi se da se postigao brži odziv poništavanjem dominantne vremenske konstante,
ali može se vidjeti da struja armature ne prati referentnu veličinu struje armature zbog
pojačanja u povratnoj vezi pa je potrebno ubaciti predfilter ispred regulacijskog kruga u
referentnu granu da bi dobili odziv kao da imamo jediničnu povratnu vezu tj. dobili bi
slijeđenje referentne veličine. Prijenosna funkcija predfiltra glasi:
GPf=KFi∗K iamj
1+sT Fi
Slika 10: Zatvoreni regulacijski krug armature sa predfiltrom u referentnoj grani

Slika 11: Struja armature sa ugrađenim predfiltrom
Slika 12: Struja armature s predfiltrom pri nazivnoj struji od 14 A
Iz slike 11 može se vidjeti kako smo postigli slijeđenje referentne veličine, dok se iz slike 12
može vidjeti slijeđenje struje armature za vrijednosti grupe parametara 6.
Parametriranje regulatora brzine vrtnje pomoću simetričnog optimuma
Za regulaciju brzine vrtnje koristit ćemo PI regulator kojeg određujemo pomoću simetričnog
optimuma. Za simetrični optimum je važno da je proces s astatizmom 1. reda što znači da
postoji jedan integralni član. Krug koji je podešen prema simetričnom optimumu brže regulira
poremećaj i ima manje dinamičko odstupanje u odnosu na tehnički optimum.

Slika 13: Zatvoreni regulacijski krug prema brzini vrtnje
Na slici 13 blok Subsystem predstavlja unutarnji regulacijski krug struje armature te ga se
može zamijeniti nadomjesnom prijenosnom funkcijom:
Gei=1
1+sT ei
Gdje je: T ei=2∗T Σ i - konstanta unutarnjeg kruga
Prijenosna funkcija regulatora brzine:
GRω=1+sT Rω
sT Iω
Parametri regulatora brzine se određuju prema:
T Σ ω=T ei+T fω
KSω=Km∗KTG∗β∗K fω∗1
J
T Rω=4∗T Σ ω
T Iω=8∗K s∗T Σ2
Slika 14: Brzina vrtnje regulirana regulatorom brzine vrtnje
Iz slike 14 se može vidjeti da postoji veliko nadvišenje, te da brzina vrtnje ne slijedi
referentnu veličinu. Kao i kod tehničkog optimuma potrebna je ugradnja predfiltara da bi se ti
poremećaji kompenzirali. Ugradit ćemo dva predfiltra gdje će jedan služiti za slijeđenje
referentne vrijednosti te će kao i kod T. O. poništavati pojačanje povratne veze, te drugi
pedfiltar koji će smanjiti nadvišenje poništavanjem nule u zatvorenom regulacijskom krugu.
Predfiltar za slijeđenje referentne vrijednosti:
GPf 1=K fω∗β∗KTG
1+sT fω
Predfiltar za smanjenje nadvišenja:
GPf 2=1
1+sT Rω
Slika 15: Zatvoreni regulacijski krug brzine vrtnje sa ugrađenim predfiltrima
Slika 16: Brzina vrtnje sa ugrađenim predfiltrima
Na kraju se na slici 16 može vidjeti da je slijeđenje referentne veličine i smanjivanje
nadvišenja uspjelo. Stabilizacija procesa je za razliku od tehničkog optimuma sporija tj.
oscilacije duže traju što je vidljivo i na grafu.

3. TREĆI DIO VJEŽBE
Simulacija zaleta motora u praznom hodu od brzine 0 do nominalne brzine za skokovitu
promjenu referentnog signala
Slika 17: Simulacijski model zadanog sustava regulacije brzine vrtnje istosmjernog motora
pri praznom hodu
Slika 18: Referentna veličina pri praznom hodu motora
Slika 19: Struja armature pri praznom hodu motora

Slika 20: Brzina motora pri praznom hodu
Slike 18-20 prikazuju prazni hod motora. Odziv brzine je kao kod simetričnog optimuma.
Nakon završetka prijelazne pojave struje, odnosno nakon što se struja spusti na nulu, tada će
se brzina vrtnje ustaliti na nazivnu vrijednost. Na slici 19 može se primijetiti veoma visoka
struja pokretanja motora.
Simulacija zaleta motora pri nominalnom opterećenju od brzine 0 do nominalne brzine
za skokovitu promjenu referentnog signala
Slika 21: Simulacijski model zadanog sustava regulacije brzine vrtnje istosmjernog motora
pri nominalnom opterećenju

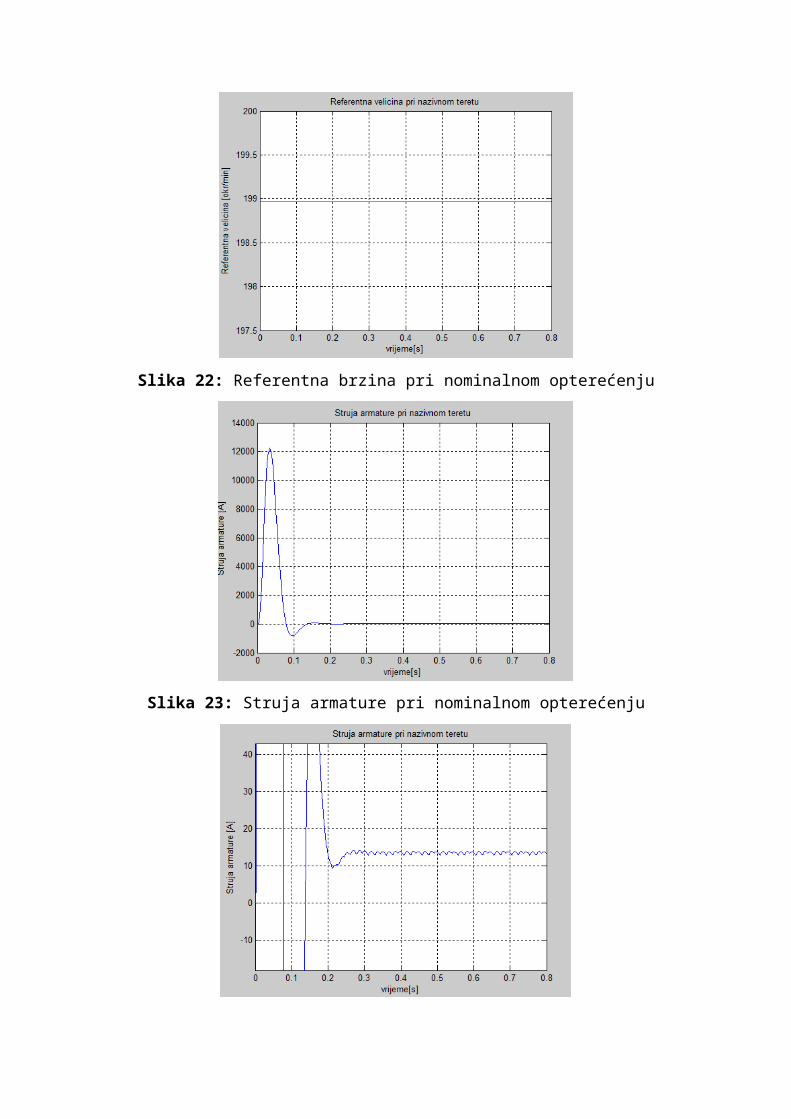
Slika 22: Referentna brzina pri nominalnom opterećenju
Slika 23: Struja armature pri nominalnom opterećenju
Slika 24: Struja armature pri nominalnom opterećenju

Slika 25: Brzina motora pri nominalnom opterećenju
Slika 26: Brzina motora pri nominalnom opterećenju
Pri priključenju nominalnog opterećenja na motor dobiju se slični odzivi, ali uz bitne razlike.
Na slici 23 vidi se da kao i kod praznog hoda postoji veliko nadvišenje struje, ali nakon
završetka prijelazne pojave struja se neće spustiti na nulu veće će se ustaliti na vrijednost od
oko 14 A što odgovara nazivnoj struji motora, što se može vidjeti na slici 24. Nakon što se
struja ustali na vrijednosti oko 14 A, brzina će ustaliti svoju vrijednost na nazivnu kao što se
vidi na slici 25. Na slici 26. može se vidjeti da u početnim trenucima pokretanja motora brzina
bude negativna iz razloga što se teret priključuje na motor pa se u tim početnim trenucima
motor vrti u suprotnom smjeru.

Simulacija djelovanja sustava za skokovite promjene referentnog signala malog iznosa
(do 10% promjene brzine vrtnje motora)
U praznom hodu:
Slika 27: Referentna veličina pri 10% promjene brzine vrtnje motora
Slika 28: Struja armature pri 10% promjene brzine vrtnje motora
Slika 29: Brzina vrtnje pri 10% promjene brzine vrtnje motora
Iz slika 27-29 može se vidjeti da su odzivi pri skokovitoj promjeni referentnog signala malog
iznosa isti kao i kod skokovite promjene referentnog signala nominalne brzine samo umanjeni
u ovisnosti o smanjenju referentnog signala.
Pri nominalnom opterećenju:
Slika 30: Referentna veličina pri 10% promjene brzine vrtnje motora
Slika 31: Struja armature pri 10% promjene brzine vrtnje motora

Slika 32: Brzina vrtnje pri 10% promjene brzine vrtnje motora
Slika 33: Brzina vrtnje pri 10% promjene brzine vrtnje motora
Odzivi se ponašaju kao i kod slučaja promjene referentnog signala nominalnog iznosa. Struja
se ustali nakon određenog vremena na nominalni iznos od oko 14 A nakon čega se brzina
ustali na 10% vrijednosti nominalne brzine. U samom početku pokretanja motora također
imamo propad brzine iz istog razloga kao i u prethodnom slučaju, a to je priključivanje tereta
na motor i vrtnje motora u suprotnom smjeru u tom razdoblju.

Simulacija djelovanja sustava za slučaj prekida unutarnje povratne veze
Slika 34: Referentna brzina vrtnje za slučaj prekida unutrašnje povratne veze
Slika 35: Struja armature za slučaj prekida unutrašnje povratne veze
Slika 36: Brzina motora za slučaj prekida unutrašnje povratne veze

Na slikama 34-36 se mogu vidjeti odzivi za slučaj prekida unutarnje povratne veze. Struja
armature prethodi brzini vrtnje motora pa unutrašnja povratne veza utječe na stabilnost
sustava. Na slikama se može vidjeti da prekid unutarnje povratne veze dovodi sustav u
nestabilnost stvarajući oscilacije velike vrijednosti.
Simulacija djelovanja sustava za slučaj prekida vanjske povratne veze
Slika 37: Referentna brzina vrtnje za slučaj prekida vanjske povratne veze
Slika 38: Struja armature za slučaj prekida vanjske povratne veze

Slika 39: Brzina motora za slučaj prekida vanjske povratne veze
Na slikama 37-39 vide se odzivi za slučaj prekida vanjske povratne veze po brzini vrtnje
motora. Nakon što se prekine vanjska povratne veza, regulacijsko odstupanje je jednako
referentnoj vrijednosti. U direktnu granu se šalje samo referentni signal što dovodi do
povećanja struje armature i brzine vrtnje u ovom slučaju neograničeno, jer nema podešenog
limita
ZAKLJUČAK
U ovoj vježbi se može uočiti složenost projektiranja parametara regulatora u sustavu
regulacije brzine vrtnje istosmjernog motora, kao i važnost postojanja istog u krugu
regulacije. U prvom dijelu vježbe smo mogli vidjeti ponašanje odziva struje armature i brzine
vrtnje za skokovite i linearne promjene napona armature. U drugom dijelu smo mogli vidjeti
kako se projektira regulator struje u unutarnjem regulacijskom krugu koji je projektiran prema
tehničkom optimumu, kao i regulator brzine vrtnje koji je projektiran prema simetričnom
optimumu, te smo mogli uvidjeti važnost predfiltara u referentnoj grani radi smanjenja
nadvišenja te slijeđenja referentne vrijednosti. U trećem dijelu vježbe smo mogli vidjeti
ponašanje motora pri zaletu motora za skokovitu promjenu referentnog signala u praznom
hodu i pri nominalnom opterećenju, te smo mogli vidjeti djelovanje sustava za skokovite
promjene referentnog signala malog iznosa. Još smo na kraju mogli vidjeti i važnost unutarnje
i vanjske povratne veze u krugu regulacije i što će se dogoditi ako se povratne veze isključe.