Profiling and scalability of the high resolution
NCEP model for Weather and Climate Simulations
Phani R, Sahai A. K, Suryachandra Rao A, Jeelani SMD
Indian Institute of Tropical Meteorology
Dr. Homi Bhabha Road, Pashan, Pune
e-mail: [email protected]
Abstract—Coupled climate modeling has become one of the
most challenging fields with the development of multicore
architectures and its importance in daily weather and climate
predictions. At IITM, ‘PRITHVI’ cluster (~70TF), NCEP
Climate Forecast System (CFS) and its atmospheric
component (GFS) have been installed on IBM Power6
architecture. Here, we investigate the scalability of the MPI-
OPenMP hybrid models (CFS, GFS) and the limitations of
hybrid spectral models when going to high resolutions. Also,
this paper looks into the performance and scaling with these
two models (CFS, GFS) on the TeraFLOP cluster, varying the
threads and describes the preliminary results for the high resolution simulations.
Keywords-CFS; GFS; scalability; profiling
I. INTRODUCTION
With the advancement of science and multi-core
architectures in High Performance Computing (HPC), the
need and expectation of accurate weather and climate
predictions for the Government agencies and agricultural
organizations have increased. One of the daunting
challenges for the weather forecasters and climate modelers
is to have better scalable models [1-3]. Efforts are being
made to improve weather forecast by running the models at
high resolution with more sophisticated physics and
radiation calls which is of very high cost. Apart from this,
ensemble technique which is now being used for the
seasonal and climate predictions in-turn make the
experiments highly computationally expensive. Presently,
on an IBM Power6, Global Forecast System (GFS) model
with T574 spectral resolution (27 KM), takes ~24 minutes
for a one day simulation on 128 cores, which is time
consuming. We look at this issue how it can be scaled by
varying the MPI tasks and the OpenMP threads. Also, the
recent innovations on increasing the density of cores in each
node/chip, the challenge lies in scaling the model on these
architectures with the variation in the MPI and OpenMP
tasks.
The speed up and the model performance are two main
issues which are very much governed by the system
architectures [4,5]. The speedup can be improved by
increasing the number of MPI tasks or the OpenMP threads
in the MPI-OpenMP parallel implementation of the model.
Recent results suggest that the work sharing between the
cores in the MPI-OpenMP parallel implementation results in
much improved performance and consumes less
communication and I/O bandwidth [2]. With this, the multi-
core architectures have gained much significance for
running hybrid MPI-OpenMP models on these architectures
[2,5,6]. In this paper, we look into the Climate Forecast
System (CFS) model and its atmospheric component Global
Forecast System (GFS) model, their performance on the
IBM Power 6 „PRITHVI‟. We confine our results for three
different spectral resolutions CFS T382, T126 and GFS
T574. We look at the scalability problem of GFS T574 by
varying the number of threads and CFS T382 scalability by
varying the number of cores. Also, the high-resolution
model (GFS T382) is compared with the low resolution
model (GFS T126) and we look closely at the variations in
these simulations.
II. THE MODEL
The NCEP Climate Forecast System (CFS) version 2
[7] is a fully coupled ocean-land-atmosphere dynamical
seasonal prediction model installed on „PRITHVI‟ (IITM)
under the Ministry of Earth Sciences (MOES) and NCEP
MOU. This model is an operational version of NCEP
released recently. At IITM, the CFS model is being run at
two different resolutions T382 (~35 KM), T126 (~100KM)
for the seasonal and extended range prediction. The
atmospheric component of the CFS is the GFS model,
includes both the global analysis and forecast components,
which implies that GFS can also be used for the weather
forecast. The Oceanic component of the CFS is the
MoM4p0 and land-surface model is of NAOH.
Interoperability is achieved with the ocean, atmosphere, sea-
ice and the land-surface components being coupled with the
Earth System Modelling Framework (ESMF) coupler and
runs on the Multiple Program Multiple Data (MPMD)
paradigm.
978-1-4673-2371-0/12/$31.00 ©2012 IEEE

A. Ocean Model
NCEP CFS model contains the Mom4P0 ocean model
[8] which is a finite difference version of the ocean
primitive equations configured under the Boussinesq and
hydrostatic approximations. The model uses the tripolar grid
with the latitude typically taken at 65°N and the other two
grids are at poles situated over land which will not have any
consequences for running the numerical ocean model. The
horizontal layout is a staggered Arakawa B grid and
geometric height is in the vertical. The model has a varying
resolution in the meridonal direction with 0.25° between
10°S and 10°N, gradually increasing to 0.5° poleward of
30°N and 30°S and the zonal direction with 0.5° resolution.
The time-step for this ocean model was 1800 seconds.
Running the CFS model is different from GFS model, CFS
has to be allocated few processors for the ocean component
to run while for the GFS it was not required. For example, if
the model has been allocated 128 cores with 60 cores to the
ocean, GFS runs on 67 cores with one core being allocated
to the coupler.
B. Atmospheric Model
GFS is global atmospheric numerical weather prediction
model developed by NCEP-NOAA [9,10]. This is a spectral
triangular model with hybrid MPI-OpenMP parallel
implementation and has 64 levels in the vertical direction.
Domain decomposition and data communication depend on
the numerical methods used in the model. Most of the
Atmospheric models are three dimensional and the domain
decomposition can be up to three dimensions. Because of its
domain dependent computations, like cloud microphysics,
parameterization schemes NCEP GFS model is a three-
dimensional model with one-dimensional decomposition.
This makes the limitation for the GFS model in the
maximum number of tasks to the number in the latitudes but
can have usage of OpenMP threads.
In the paper, we discuss the GFS T574 (~27KM) along
with the CFS T382 (~35KM) models. For each of these
resolutions, forecast simulations have been done for 8 days
and the total runtimes have been averaged to 1 day. Both the
models have been run in forecast mode with 6 hourly
outputs and the time-step for CFS was 600 seconds while
for GFS was 120 seconds. In the last part of our paper, we
compare the GFS T126 with the GFS T382 results by giving
an observed SST forcing. Simulation for the GFS T126
(Forced Sea Surface Temperature (SST)) and GFS T382
(Forced SST) have been performed for 55 years and 40
years respectively, and the time taken for each of these runs
are 21 days and 48 days respectively on 128 cores.
III. THE SYSTEM
Prithvi‟s IBM Power6 processors support Simultaneous
Multithreading (SMT) which is one of the multi-core
technology on which the hybrid models are supposed to
giver better performance. SMT is a processor technology
that allows two separate instruction streams (threads) to run
concurrently on the same physical processor, improving
overall throughput. On “PRITHVI”, there are 117 nodes
with 128 GB of memory and each node is equipped with 16
Power6 processors, or 32 physical cores. With SMT
switched on, there are 64 logical cores (virtual cpus). Since
each node runs its own operating system, they can be
rebooted or repaired independently from the others,
resulting in higher availability of the overall. It should be
noted that only the 32 physical cores within each node have
direct access to the memory. Also, the total number of cores
for a hybrid model to run in each node can be a maximum of
64 on IBM Power6 architecture. Due to this reason we can
vary the OpenMP threads to a maximum of 32 and a
minimum of 2 MPI tasks in each node. IBM‟s MPI and
LAPI are being used for parallel communication while the
Infiband network is Qlogic.
Figure 1. GFS scalability plot for MPI tasks 128 and 400 by varying
the threads.
IV. EFFICIENCY OF THREADING
Climate model involves solving the Navier-Strokes
dynamical equations at each grid-point by different
methods. Out of the finite difference, finite volume, finite
element, spectral element and spectral method, spectral
method gives good exponential convergence (for smooth
solution) and the elimination of pole problems when using
spherical coordinates. The main disadvantage of using the
spectral method is the occurrence of Gibbs phenomena and
the limitation of the spectral truncations. The climate
models which we have presented here, CFS and GFS are
also a part of them. When running CFS, or the GFS, the
atmospheric model spectral dynamical core supports 1D
decomposition over latitude. For this reason, we cannot
increase the number of MPI tasks in running the model
beyond the spectral truncation. For example, if we are
working on GFS T574 spectral resolution, it means that the
spectral triangular truncations are 574 and the number of
MPI tasks cannot be larger than 574. The other option is to
run the climate models with OpenMP threads and we have
performed experiments by varying the OpenMP threads on
different cores rather than running on the same core. There
was an apprehension that running threads on different cores
in a multi-core architecture can increase the performance
rather than on a single core. We address this question by
performing this experiment on our multi-core „PRITHVI‟
system that allows threading to run on virtual and physical
cores concurrently. Our aim is to run the model by varying
the OpenMP threads within each node and look into the
scalability issues.
V. RESULTS AND DISCUSSIONS
Hybrid model scalability performance can be better
understood by varying the MPI and the OpenMP threads.
Initial experiment was performed on the GFS T574
atmospheric model in varying the OpenMP threads. In this
experiment, the total MPI tasks have been fixed and
increased the OpenMP threads in each node from 1 to 32,
thereby decreasing the MPI tasks in each node from 64 to 2
(1 OpenMP thread has 64 MPI tasks, 2 threads have 32 MPI
tasks, 8 threads have 8 MPI tasks, 16 OpenMP threads have
4 MPI tasks in each node). Two experiments have been
performed on this model with MPI task equal to 128 and the
other with MPI tasks equal to 400 and varying the OpenMP
threads. For example, with 400 MPI tasks and 8 OpenMP
threads, the model has been run on 3200 cores ~ 50 nodes ~
30TF.
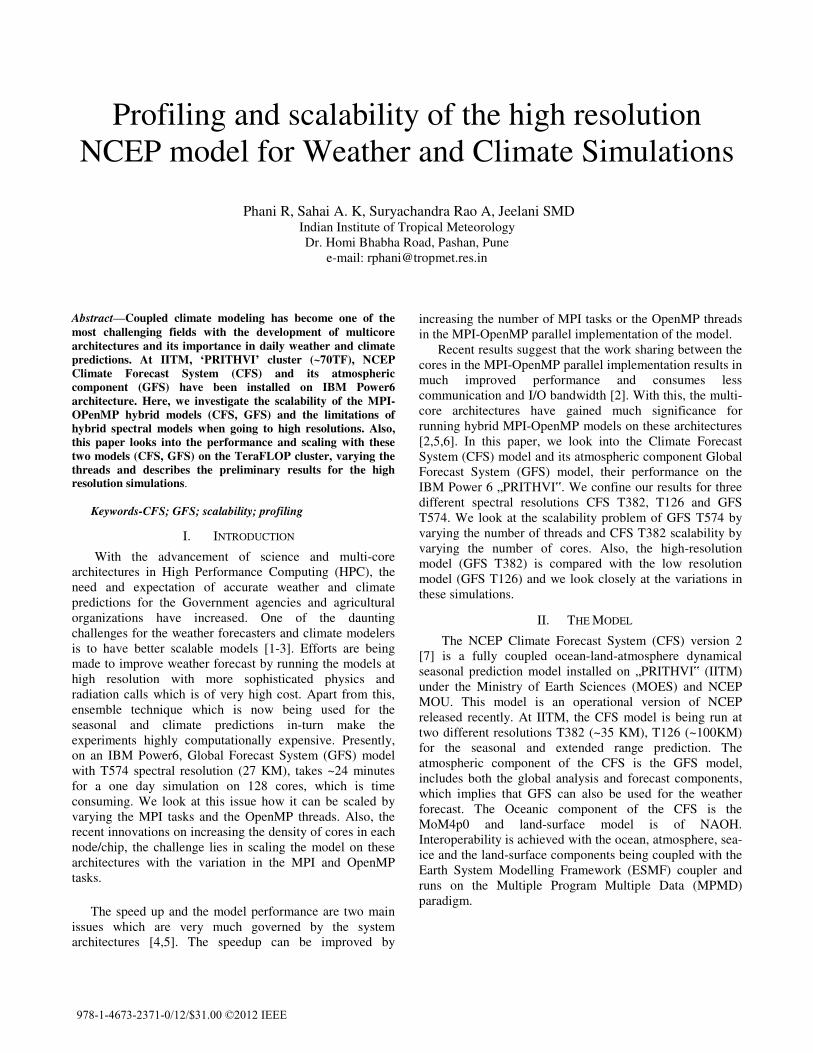
Figure 2. Speed up of the GFS T574 model by varying the number of
threads for two different MPI tasks 128 and 400.
Fig.1 shows the scalability plot of GFS T574 for two
MPI tasks 400 and 128. The GFS model is highly scalable
with 128 MPI tasks but for the 400MPI tasks it is scalable
till 8 threads perfectly but beyond that it has not efficiently
scalable. Though 128 MPI tasks is better scaling than the
400 MPI tasks, but it is slower. Consider 8 OpenMP
threads, the model takes 10.7 minutes for 128 MPI tasks
(9.6 TF), while it takes 5.3 minutes for 400 MPI tasks
(30TF). Having the same number of MPI and OpenMP tasks
in each node and changing the total MPI tasks is very much
effective on the timings. In fact, both the curves reach a
limit, asymptotically as the number of threads per node is
increased. This can be an inherent problem in the model.
The speed-up of the model is calculated from the ratio of the
time taken for a single core to the total time of number of
cores. In this work, we have defined as the ratio between the
times taken for a single thread to the total number of
threads. Speed-up of the GFS model for both 128 MPI tasks
and 400 MPI tasks is same up to 8 threads but changes the
linearity when the threads are 16 which were plotted in
Fig.2. From these two figures, we understand that one has to
be careful in the selection of the right approach as both
curves have the same speed-up till 8 threads. Though 128
MPI tasks curve gives good scalability, 400 MPI tasks with
8 threads would be a better option in running the model.
Increasing the OpenMP threads on hybrid architectures may
not be an option, but have a cap on the number of threads is
required. In this experiment, 8 OpenMP threads in each
node give an efficient scalability.
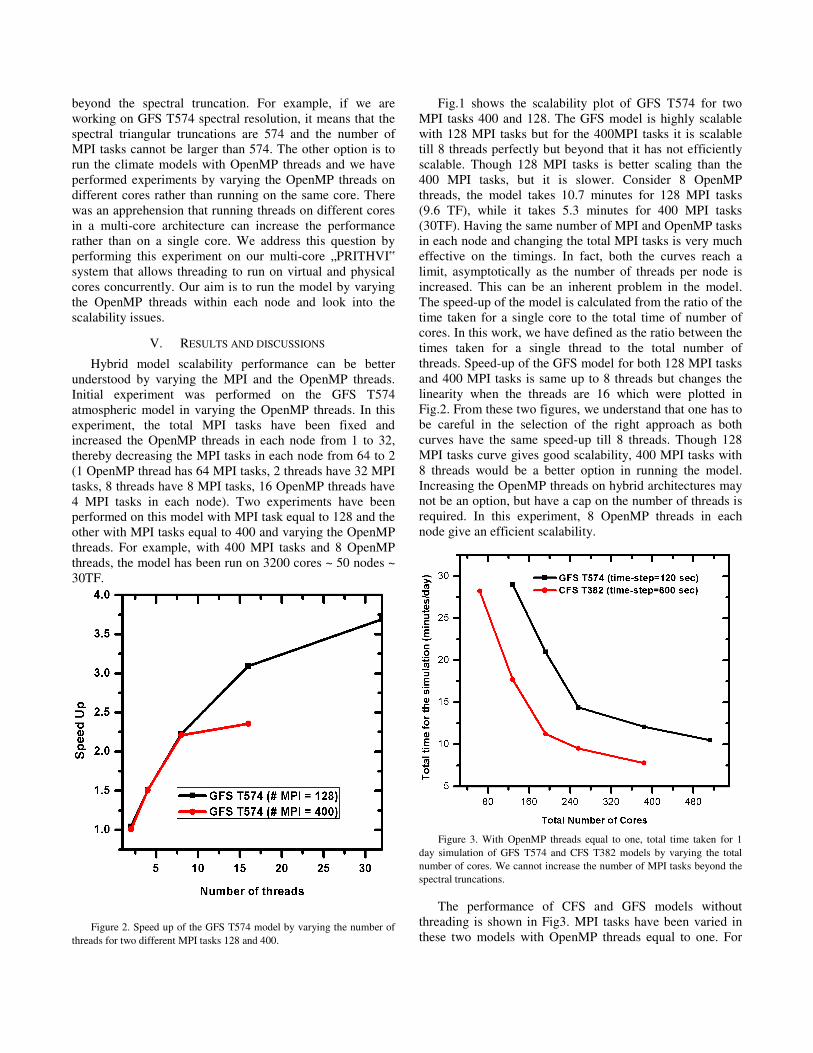
Figure 3. With OpenMP threads equal to one, total time taken for 1
day simulation of GFS T574 and CFS T382 models by varying the total
number of cores. We cannot increase the number of MPI tasks beyond the
spectral truncations.
The performance of CFS and GFS models without
threading is shown in Fig3. MPI tasks have been varied in
these two models with OpenMP threads equal to one. For

the CFS T382, the number of cores for the ocean has been
fixed to 60. Both the models are scalable until their limit of
spectral truncations. It is very much interesting to compare
the time taken for GFS T574 with threads (Fig.1) and
without threads (Fig.3). Consider 512 total tasks, without
threads GFS T574 takes 10.5 minutes, while with 128 MPI
tasks and 4 threads takes 15.9 minutes. Pure MPI job takes
less time than the job with threads, because, the GFS model
is a spectral dynamical core with 1D decomposition, the
MPI tasks can be a maximum of the spectral truncations.
Mean climatological precipitation plots were shown in Fig.4
for the Indian subcontinent in which GFS (forced SST)
T126 and T382 spectral resolutions are compared with the
observations. The observations are from Indian
Meteorological Department (IMD) and the GPCP (Global
Precipitation Climatology Project). The IMD and GPCP are
1° x 1° data, while, GFS (Forced SST) T126 and T382 are
1° x 1° data and 0.3° x 0.3° respectively. Fig.4 shows that
the observations are in good agreement with the model plots
over the land. Also, the increase in resolution has
considerable increase in the orographic features remarkably.
We observe that there are few dark colors at some places
and they appear periodically (where the mountains are
located) which is nothing but Gibbs phenomenon inherent in
the spectral models at high resolution.
In conclusions, the model output data does not vary
(RMS error difference is zero) with the threads nor with the
cores, which makes us to believe that the hybrid MPI-
OpenMP parallel implementation on the multi-core
architectures has a tremendous potential to be improved in
terms of the scalability. On the multi-core architectures, the
performance of GFS and CFS models have been studied and
looked into the scalability issues. GFS T574 is scalable up
to 32 OpenMP threads with 128 MPI tasks, but the same is
not true for 400 MPI tasks. Experimental results with the
GFS T574 spectral resolution show that beyond 8 OpenMP
threads the linearity in the speedup is lost. In this analysis,
400 MPI tasks with 8 OpenMP threads give better scalable
results. Furthermore, the model improvement is performed
with the high resolution model. This issue was addressed by
looking at the CFS T126 and CFS T382 spectral models and
comparing with the observational data. Though the
orographic precipitation features have considerably
increased over land but came across with Gibbs
phenomenon at few places. Mere increase in the resolution
may give us better results but the Gibbs phenomenon has to
be taken into account in running the model. The GFS and
CFS models are scalable with the MPI-tasks being less than
the spectral triangular truncations. With MPI tasks near to
the spectral triangular truncation, OpenMP threading gives
better performance on the hybrid architectures
ACKNOWLEDGMENT
IITM is fully funded by Ministry of Earth Sciences. PR would like to thank Prof. Ravi Nanjundiah, IISc for his valuable inputs and Rajan, IBM.
REFERENCES
[1] Chunhua Liao, Zhenying Liu, Lei Huang and Barbara Chapman,
“Evaluating OpenMP on Chip MultiThreading Platforms,” Lecture Notes in Computer Science, vol. 4315, pp. 178-190, 2008.
[2] David Champ, Christoph Garth, Hank Childs, Dave Pugmire and Kenneth I. Joy, “Streamline Integration Using MPI-Hybrid Parallelism on a Large Multicore Architecture,” IEEE Transactions on Visualization and Computer Graphics, 12, 2011.
[3] H Hirata, K Kimura, S Nagamine, Y Mochizuki, A Nishimura, Y Nakase, T Nishizawa, “An elementary processor architecture with simultaneous instruction issuing from multiple threads,” Proceedings of the 19th annual international symposium on Computer architecture, 136 - 145, 1992.
[4] I Foster, W. Gropp, R.Stevens, “Parallel Scalability of the Spectral Transform Method", Proceedings of the fifth SIAM conference on "Parallel Processing on Scientific Computing”, page 307, 1988.
[5] John Drakea, Ian Foster, John Michalakesb, Brian Toonenb, Patrick Worleya, "Design and performance of a scalable parallel community climate model", Parallel Computing, 21, 1571-1591, 1995.
[6] David Tam, Reza Azimi, Michael Stumm, “Thread clustering: sharing-aware sheduling on SMP-CMp-SMT”, Proceedings of the 2nd ACM SIGOPS/EuroSys European Conference on Computer Systems, 2007.
[7] Suranjana, Saha et.al., “The NCEP Climate Forecast System Version2,” 2012, Submitted to Journal of Climate.
[8] Stephen Griffies M. Harrison, Ronald C. Pacanowski and Antony Rosati, “A technical guide to MoM4,” GFDL Ocean Group Technical Report 5, NOAA, 2004.
[9] NCEP NOAA: Envoronomental Modelling Center, “The GFS Atmospheric model” NCEP Office Note 442, Global Climate and Weather Modelling Branch, EMC, Camp Springs, Maryland, 2003.
[10] Han J, H-L Pan, Revision and Convection of Vertical Diffusion in the NCEP Global Forecast System, Weather and Forecasting, 2011, 26,520-533.

Figure 4. Mean Climatological precipitation plot for a) GFS T126 (forced Sea Surface Temperature (SST)) for 55 years at 384 x 190 grid resolution b) GFS
T382 (forced SST) for 40 years at 1152 x 576 grid resolution c) IMD station observational data at 360 x 180 grid resolution d) GPCP observational data at
360 x 180 grid resolution.







