dynamic optimization challenges in autonomous vehicle...
TRANSCRIPT

1
Dynamic Optimization Challenges in Autonomous Vehicle Systems
Fernando Lobo Pereira, João Borges de Sousa
Faculdade de Engenharia da Universidade do Porto (FEUP)
Presented by
Jorge Estrela da Silva (Phd student at FEUP)
OMPC 2013 - Summer School and Workshop on
Optimal and Model Predictive Control
September 9-13, 2013
Bayreuth, Germany

2
Acknowledgment The contents of this presentation builds on the effort of the LSTS researchers

3
Outline
Overview of LSTS - Underwater Systems and
Technologies Laboratory
Overview of Optimization Issues for Autonomous
Systems
Some dynamic optimization developments by LSTS
members

4
Underwater systems and technologies lab
Mission statement
Design, construction and deployment of
innovative vehicle/sensor systems for
oceanographic, environmental, military
and security applications
History
Laboratory established in 1997
Involves students and faculty
from ECE, ME and CS
Primary sponsors: DoD, FCT
Additional sponsors: FP7, NATO,
ADI, FLAD, Gulbenkian, PSP-
UCB
Networked vehicle

5
System of systems
Moored sensors
Autonomous surface vehicle
Surface buoy
Navigation beacon
Oceanographic sensors
Moored sensors
Drifters
AUV
AUV
UAV UAV
AUV
Localization
links
Communication
links
Sensing
links
UAV
Vehicles come
and go
Control station
Control station
Control station
Operators come
and go
Data provisioning
Intervention
AUV
Data mules
DTN
Mixed-initiative
interactions
Persistent dirty, dull and
dangerous operations over
wide areas
Sensor network

6
Emergent engineering systems?
Water cycle
Defense
Environment and oceans
Harbour security and surveillance
Geographically co-located (maximize synergies)

7
Unmanned Vehicles at LSTS (1)
Autonomous Submarine for long range missions
Acoustic Modem, ADCP, Sidescan Sonar, CTD, IMU, GPS
Acoustic modem, Wi-Fi and GSM/GPRS communications
Low cost and small (lightweight)
Modular sensors (altimeter, GPS, CTD, IMU, …)
Acoustic modem, Wi-Fi and GSM/GPRS communications
7 vehicles built since 2008
Light Autonomous Underwater Vehicle (LAUV)
New Autonomous Underwater Vehicle (NAUV)

8
Unmanned Vehicles at LSTS (2)
Built completely in FEUP
• IMU, LBL Navigation
• Onboard camera and robotic arm
• Remotely operated using a laptop/joystick
•On board real-time control
• Katamaran frame with two electric thrusters
• Wireless video camera, sonar
• Wi-Fi and GSM/GPRS communications
Swordfish ASV
ROV-KOS

9
Unmanned Vehicles at LSTS (3)
Picollo autopilot
Radio, Wi-Fi and GSM/GPRS communications
Wireless video camera
Gas-powered thruster
Frame built by the portuguese air force academy
CPU stack and software developed in FEUP
Wi-Fi + GSM/GPRS communications
Wireless video camera
Antex X02 UAVs
Lusitania UAV

10
Overview of Optimization Issues for Autonomous Systems

11
The Role of Optimization
Moored sensors
Autonomous surface vehicle
Surface buoy
Navigation beacon
Oceanographic sensors
Moored sensors
Drifters
AUV
AUV
UAV UAV
AUV
UAV
Control station
Control station
Control station
AUV
Tool in the quest for autonomy
Why Optimization? Control synthesis targeting:
• Performance – min time, min fuel
• Robustness – worst case scenario
• Contraint enforcement – region of operation, actuator saturation, QoS
Contexts :
• Tactical – specific activity
• Strategical - purpose of the system

12
Challenging Requirements
Moored sensors
Autonomous surface vehicle
Surface buoy
Navigation beacon
Oceanographic sensors
Moored sensors
Drifters
AUV
AUV
UAV UAV
AUV
UAV
Control station
Control station
Control station
AUV
System complexity
Modelling (e.g., hydrodynamic effects)
Environment rich in interacting processes
high variability
Uncertainty
• Perturbations –randomness, unmodelled phenomena, ...
Limited resources (space, power and time)
limited communications, sensing, computation
partial information available

13
Optimization Contexts
Moored sensors
Autonomous surface vehicle
Surface buoy
Navigation beacon
Oceanographic sensors
Moored sensors
Drifters
AUV
AUV
UAV UAV
AUV
UAV
Control station
Control station
Control station
AUV
Control Architecture
Partitions the overall problem into amenable subproblems (time
horizon, level of abstraction):
• Organization layer – planning (off-line optimization)
• Supervision layer – re-planning (“on-line” optimization)
• Coordination layer – pick feasible task with higher added value
• Maneuver layer – control synthesis (feedback optimization)
Structural Arrangement
• Activities logically organized to ensure task/mission completion
Systems Engineering Process
Transformation of objectives, requirements & constraints into a
System-Solution

14
An Application Scenario
Two AUV teams Positioning service (L team)
Finding the minimum of a scalar field (S team)
Teams have to coordinate activities Intra-team control:
provide a service satisfying technological constraints & requirements.
Inter-team control:
implement a model of coordination (L team must “follow” S team)

15
Search team Coordinated gradient following
Invariance problem

16
Some dynamic optimization developments by LSTS members

17
Dynamic optimization developments
Moored sensors
Autonomous surface vehicle
Surface buoy
Navigation beacon
Oceanographic sensors
Moored sensors
Drifters
AUV
AUV
UAV UAV
AUV
UAV
Control station
Control station
Control station
AUV
Value Function based coordination
Model Predictive Control
Dynamic Programming based controllers J. Estrela da Silva, J. Borges de Sousa, A dynamic programming based path-following controller for autonomous vehicles, Control and Intelligent Systems, Vol. 39, No. 4, 2011
J. Estrela da Silva, J. Borges de Sousa, Dynamic Programming Techniques for Feedback Control, IFAC18th World Congress, Milano, Italy, August 28 - September 2, 2011.
J. Estrela da Silva, J. Borges de Sousa, F. Lobo Pereira, “Experimental results with value function based control of an AUV”, NGCUV 2012 Workshop, Porto, Portugal, April 10-12, 2012.
F. Lobo Pereira, J. Borges de Sousa, R. Gomes, P. Calado, MPC based coordinated control of Autonomous Underwater Vehicles, ICIAM, Vancouver, July 18-22, 2011
F. Lobo Pereira, “Reach set formulation of a model predictive control scheme”, MTNS 2012, 20th Melbourne, Australia, July 9-13, 2012.
J. Borges de Sousa, F. Lobo Pereira, A set-valued framework for coordinated motion control of networked vehicles, Journal of Computer and Systems Sciences International, 2006
F. Lobo Pereira, J. Borges de Sousa, Coordinated Control of Networked Vehicles: An Autonomous Underwater Systems, Automation and Remote Control, 2004
.

18
Dynamic programming based controllers Jorge Estrela da Silva, João Sousa, Fernando Lobo Pereira

19
Problem formulation
Differential game (upper value solution)
• Subject to:
• Optimal cost to reach a target:
Adversarial (maximizing) input models disturbances and model
uncertainty
Input sequence a(.) is piecewise constant
0
0
non-anticipative
20
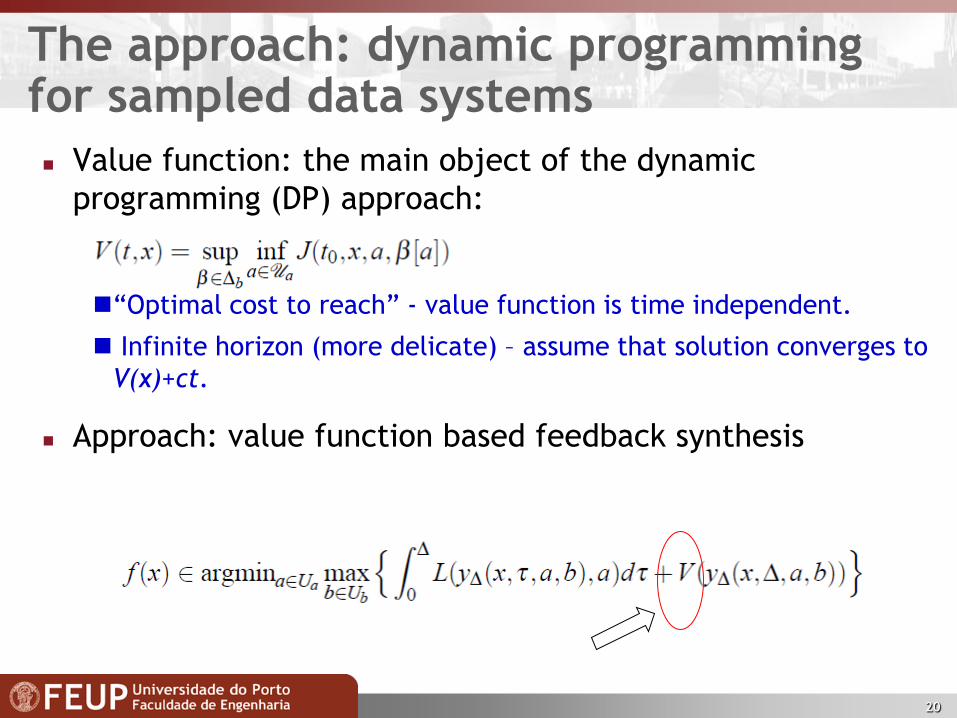
The approach: dynamic programming for sampled data systems
Value function: the main object of the dynamic
programming (DP) approach:
“Optimal cost to reach” - value function is time independent.
Infinite horizon (more delicate) – assume that solution converges to
V(x)+ct.
Approach: value function based feedback synthesis

21
Value function computation
In general, it is not possible to find an analytical expression
for the value function.
• Numerical methods are required.
Numerical computation of the value function is expensive,
but not impossible for systems of low dimension.
• And, for the considered problems, this can be done at the design
stage.
Our solver is based on the semi-Lagrangian (SL) numerical
scheme by Falcone and co-authors, see, e.g.,
22
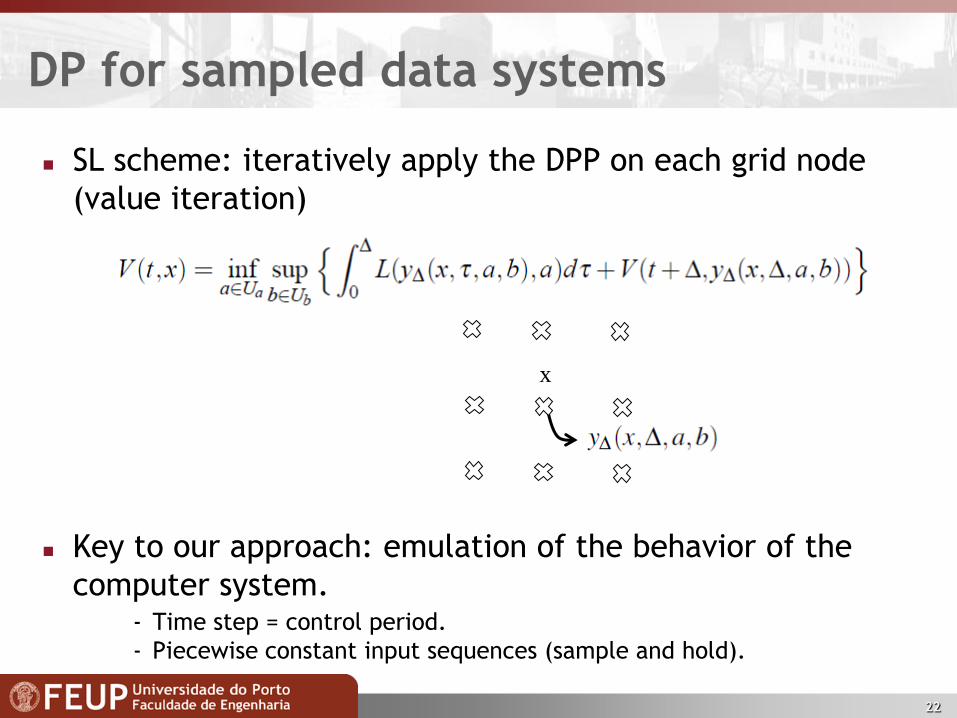
DP for sampled data systems
SL scheme: iteratively apply the DPP on each grid node
(value iteration)
Key to our approach: emulation of the behavior of the
computer system. - Time step = control period.
- Piecewise constant input sequences (sample and hold).
x

23
Implementation of the control law
What to store on the target computer?
• Numerical approximation of the value function
• Constant control on each grid cell
- Requires less computations (local optimization is avoided).
- May require more storage space, depending on the dimension of the
control input.
- In the former approach, the computed control is, in general, closer to
the optimal.

24
Example 1 - Path following model for an AUV
State variables:
• Cross-track error
• Angle relative to path
• Angular velocity
• Fin (angular) position
Input rv defines the path
curvature .

25
Value functions
Specifications
• Maximum cross-track error: 6 m
• Maximum fin angle: 0.26 rad
Inside the MCIS: Infinite horizon problem
• Running cost:
• xmin = -6.000000, -1.570796, -0.400000, -0.260000
• xmax = 6.000000, 1.570796, 0.400000, 0.260000
• nx = 121, 151, 7, 31 (3964807 nodes)
Outside the MCIS: Minimum Time to Reach problem
• xmin = -9.000000, -3.141593, -0.400000
• xmax = 9.000000, 3.141593, 0.400000
• nx = 181, 301, 5 (272405 nodes)

26
Sea trials at Leixões Harbour (2011/07)

27

28
Final remarks (I)
Further work (not discussed here)
• Refinements/extensions of the numerical solver
- Dealing with the continuous-time nature of the disturbances in the
presence of large sampling steps.
- Input switching costs.
• Aperiodic control
- Next sampling instant decided by the control law.

29
Final remarks (II)
Numerical approximations lead to sub-optimality.
• And also to lack of the robustness: is the adversarial really “doing
its worst”?
• Is this much different from the “approximate dynamic
programming” approaches?
• What “stability” and invariance properties is it possible to assure?
- Verification algorithm based on constrained convex optimization.
- Partition of the state space (e.g., as given by the grid cells).
- Check Lyapunov like decrease condition on each subset, using quadratic
local approximation of the value function.
- Very computationally expensive.
30
Thank you for your attention.