dynamics of reciprocating engines - kişisel …kisi.deu.edu.tr/saide.sarigul/dyn_rec_eng.pdf ·...
TRANSCRIPT
DYNAMICS OF RECIPROCATING ENGINES
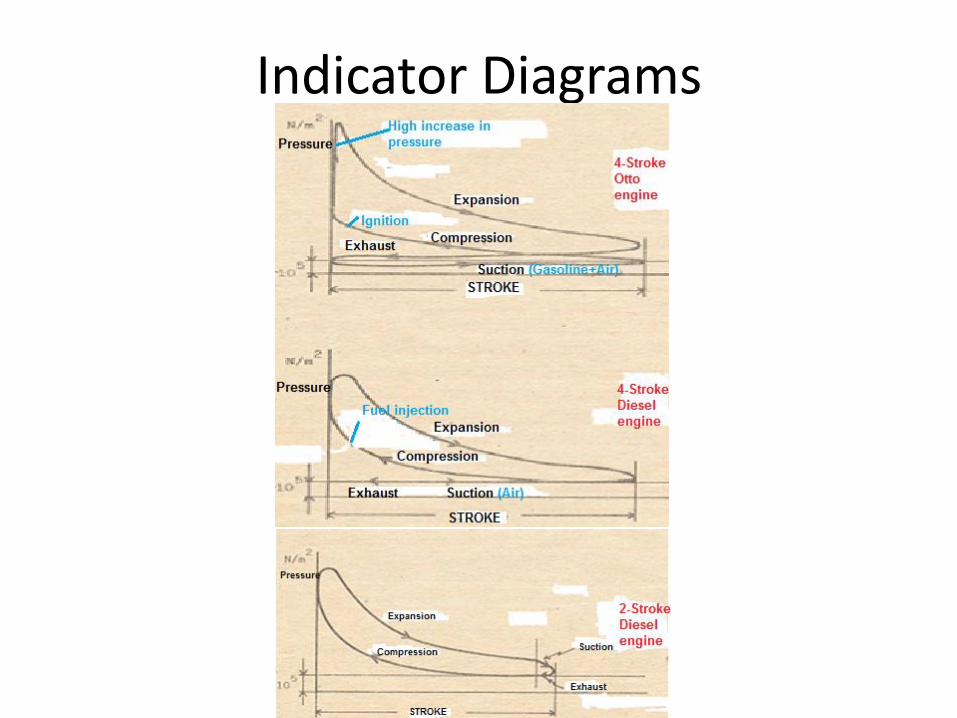
Indicator Diagrams
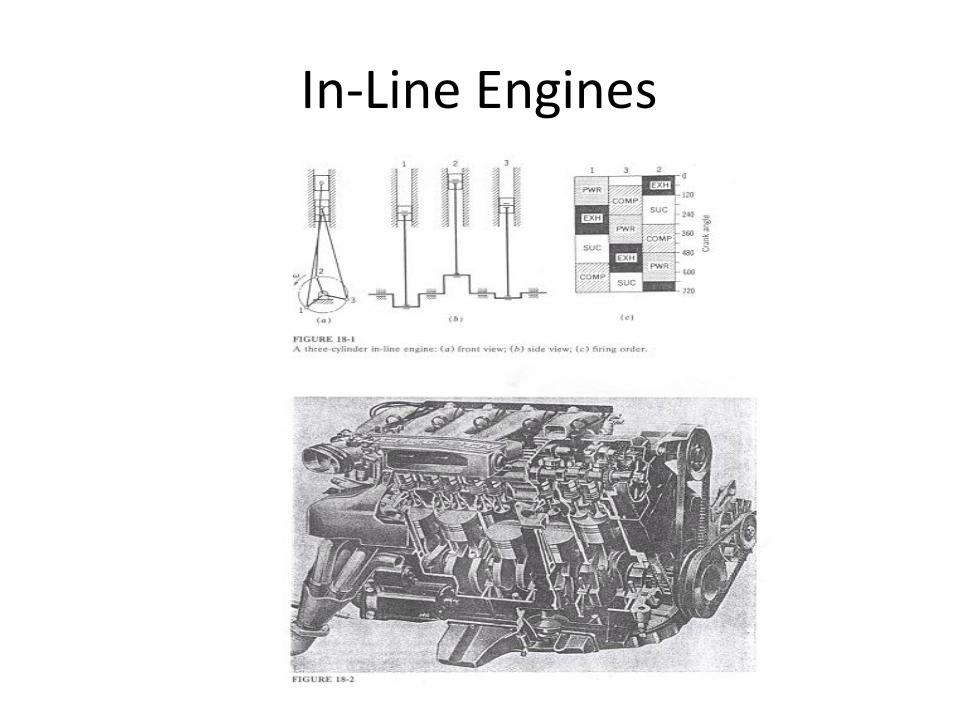
In-Line Engines
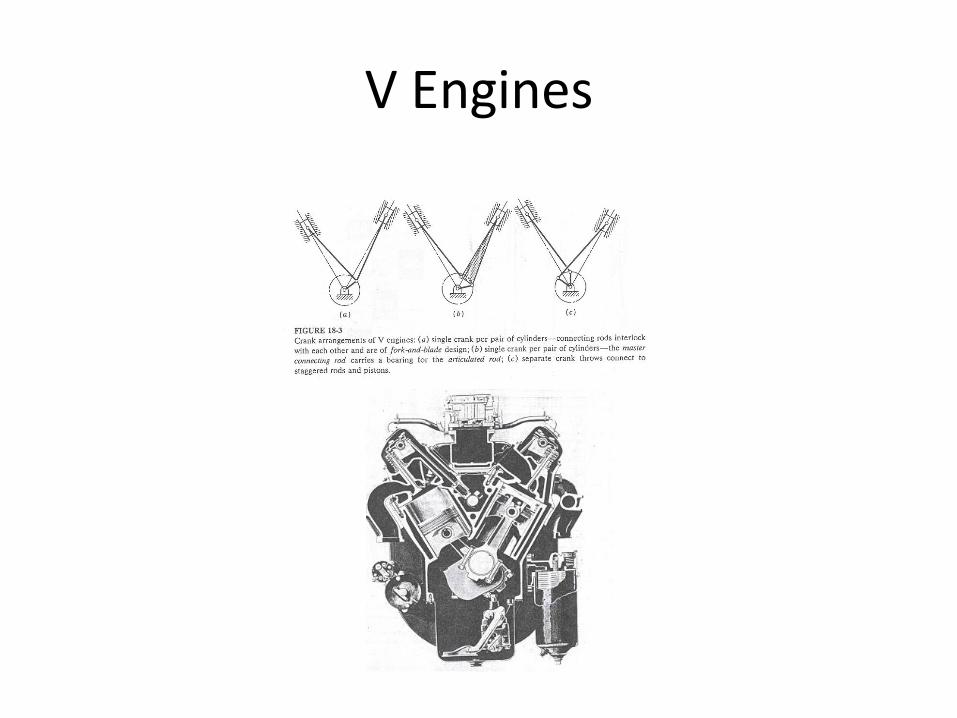
V Engines
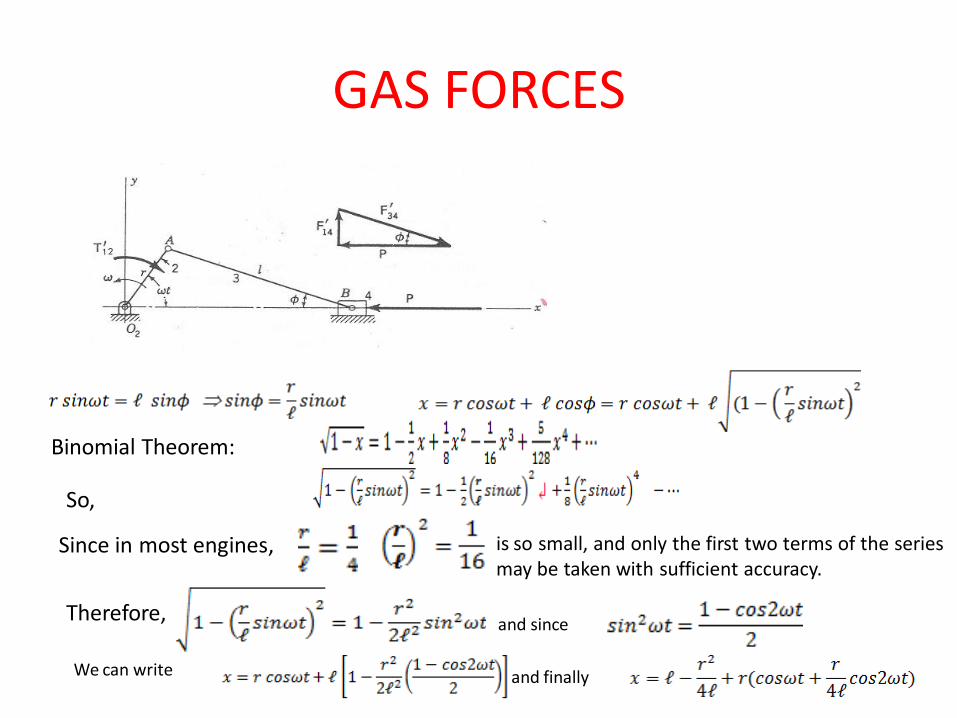
GAS FORCES
Binomial Theorem:
So,
Since in most engines,
is so small, and only the first two terms of the series may be taken with sufficient accuracy.
Therefore, and since
We can write and finally
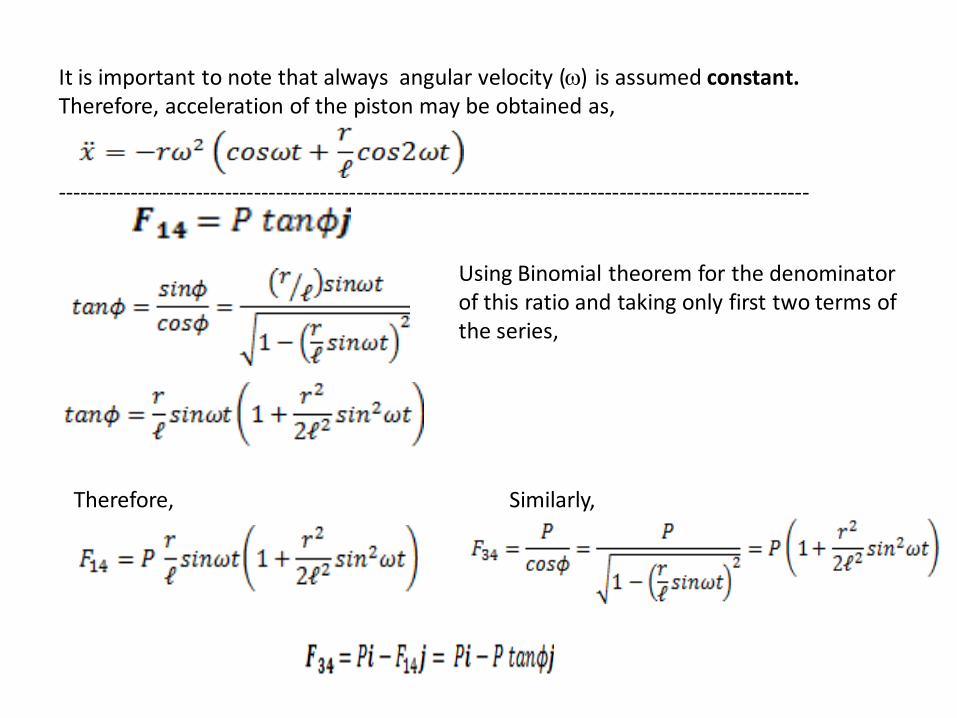
It is important to note that always angular velocity () is assumed constant. Therefore, acceleration of the piston may be obtained as, -------------------------------------------------------------------------------------------------------
Using Binomial theorem for the denominator of this ratio and taking only first two terms of the series,
Therefore, Similarly,
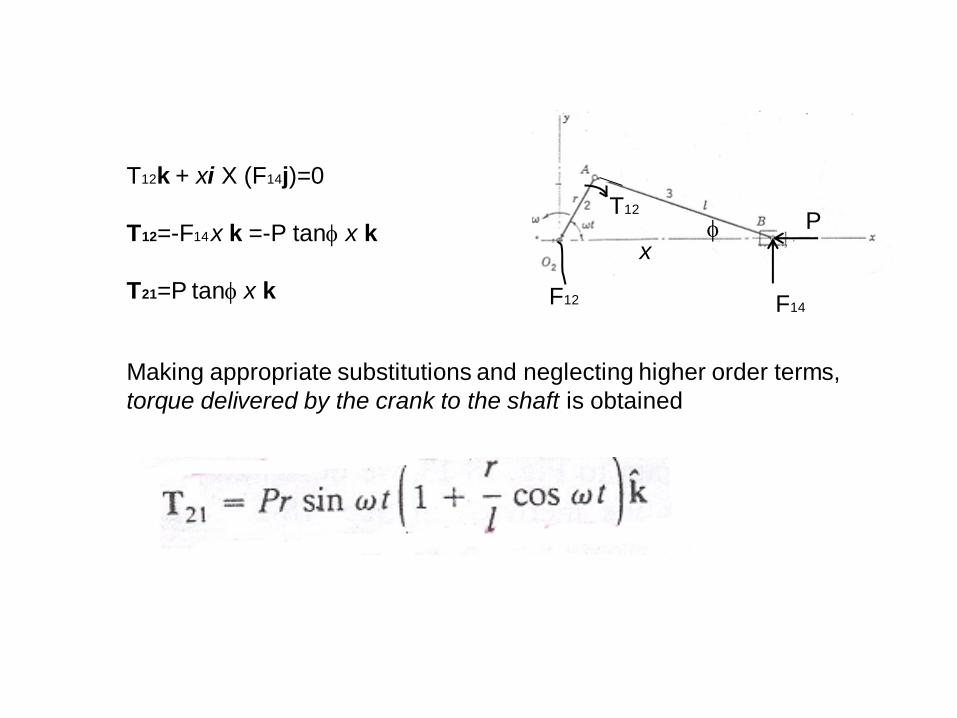
T12k + xi X (F14j)=0
T12=-F14 x k =-P tan x k
T21=P tan x k F14
P
F12
T12
x
Making appropriate substitutions and neglecting higher order terms,
torque delivered by the crank to the shaft is obtained
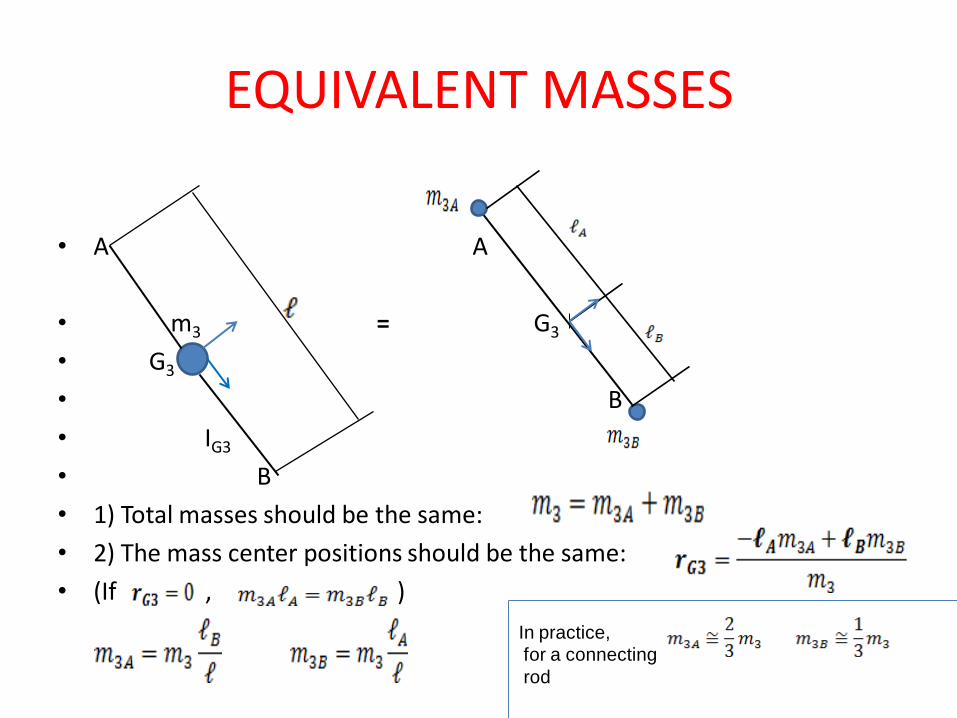
EQUIVALENT MASSES
• A A
• m3 = G3
• G3
• B
• IG3
• B
• 1) Total masses should be the same:
• 2) The mass center positions should be the same:
• (If , )
In practice,
for a connecting
rod
EQUIVALENT MASSES
• The first two conditions is called STATIC EQIVALENCE.
• 3) The mass moment of inertias should be the same:
• The third condition is called DYNAMIC EQIVALENCE.
• For a connecting rod of a slider-crank mechanism, our aim is to divide the total mass into two masses; one, at point A (rotating) and the other one, at point B (reciprocating). The third condition does not conform our aim , therefore it is not satisfied throughout the analysis of connecting rod.
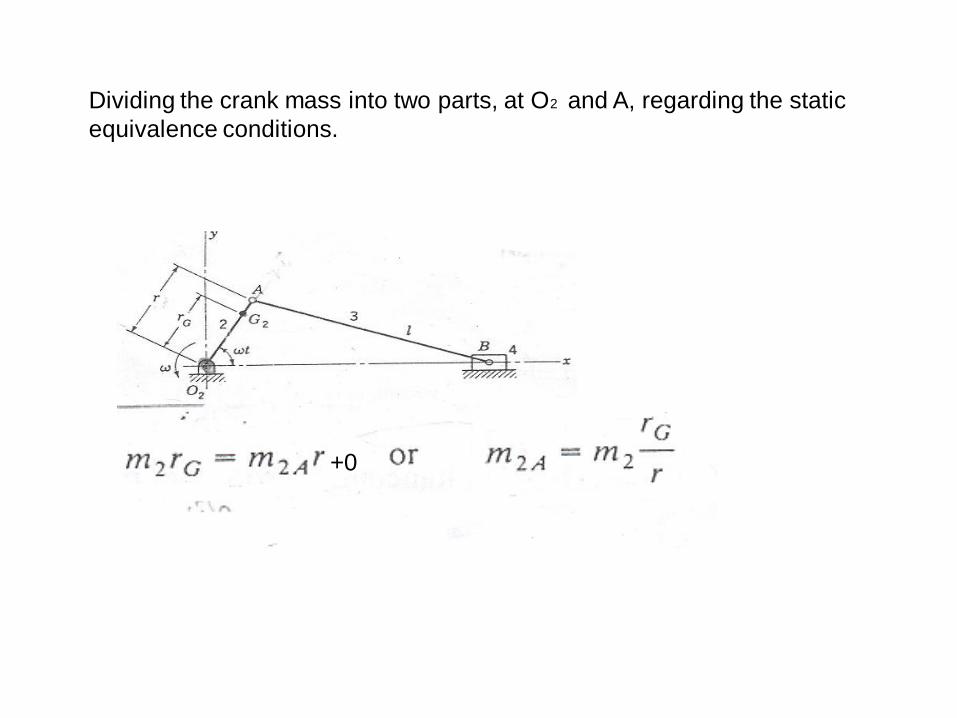
Dividing the crank mass into two parts, at O2 and A, regarding the static
equivalence conditions.
+0
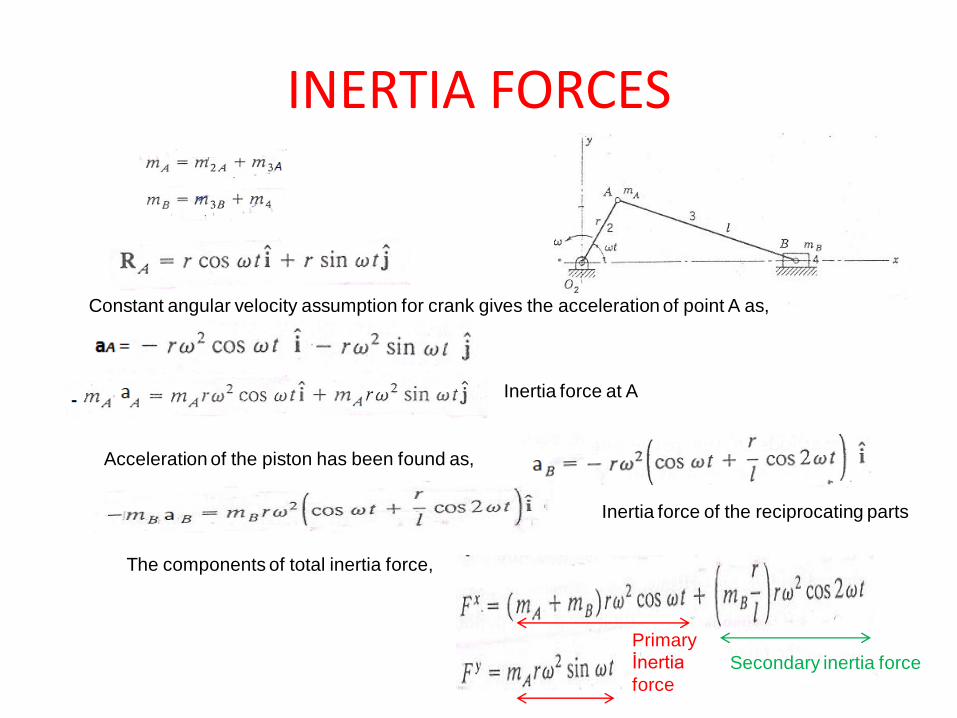
INERTIA FORCES
Constant angular velocity assumption for crank gives the acceleration of point A as,
Inertia force at A
Acceleration of the piston has been found as,
Inertia force of the reciprocating parts
The components of total inertia force,
Secondary inertia force
Primary
İnertia
force
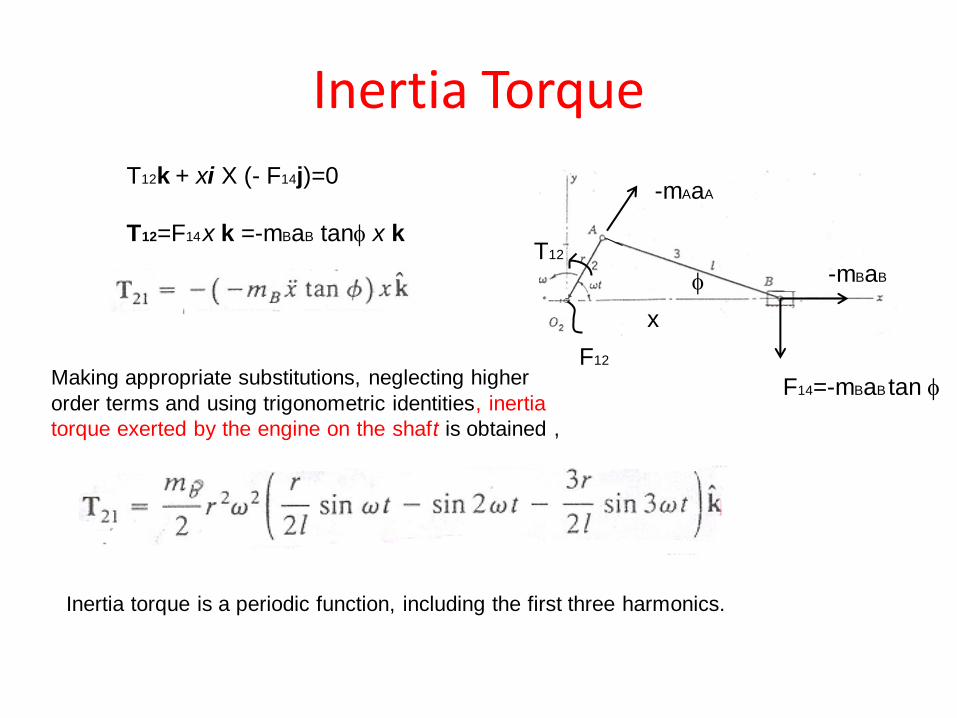
Inertia Torque
T12
F12
F14=-mBaB tan
-mBaB
-mAaA T12k + xi X (- F14j)=0
T12=F14 x k =-mBaB tan x k
Making appropriate substitutions, neglecting higher
order terms and using trigonometric identities, inertia
torque exerted by the engine on the shaft is obtained ,
Inertia torque is a periodic function, including the first three harmonics.
x
BEARING LOADS IN THE SINGLE-CYLINDER ENGINE
• The resultant bearing loads in a single-cylinder engine are made up of due to the following four forces:
• 1) Gas force (examined at the beginning).
• 2) Inertia force due to the mass of piston m4.
• 3) Inertia force due to the mass of connecting rod m3B at piston-pin end.
• 4) Inertia force due to the mass of connecting rod m3A at crank-pin end.
• (It is assumed that crank has been balanced.)
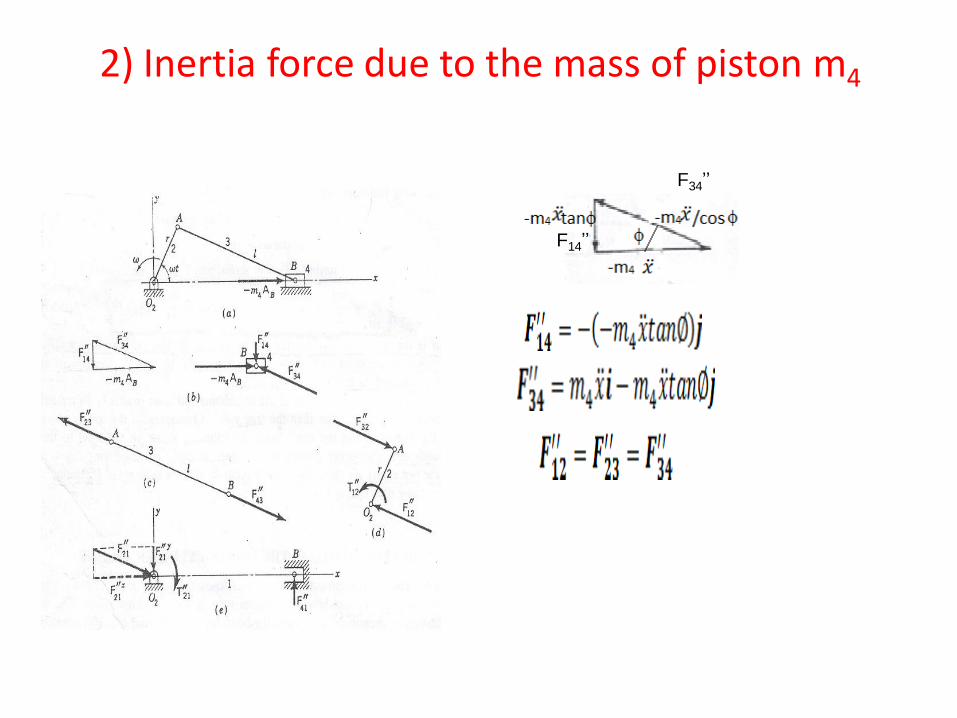
2) Inertia force due to the mass of piston m4
F14’’
F34’’
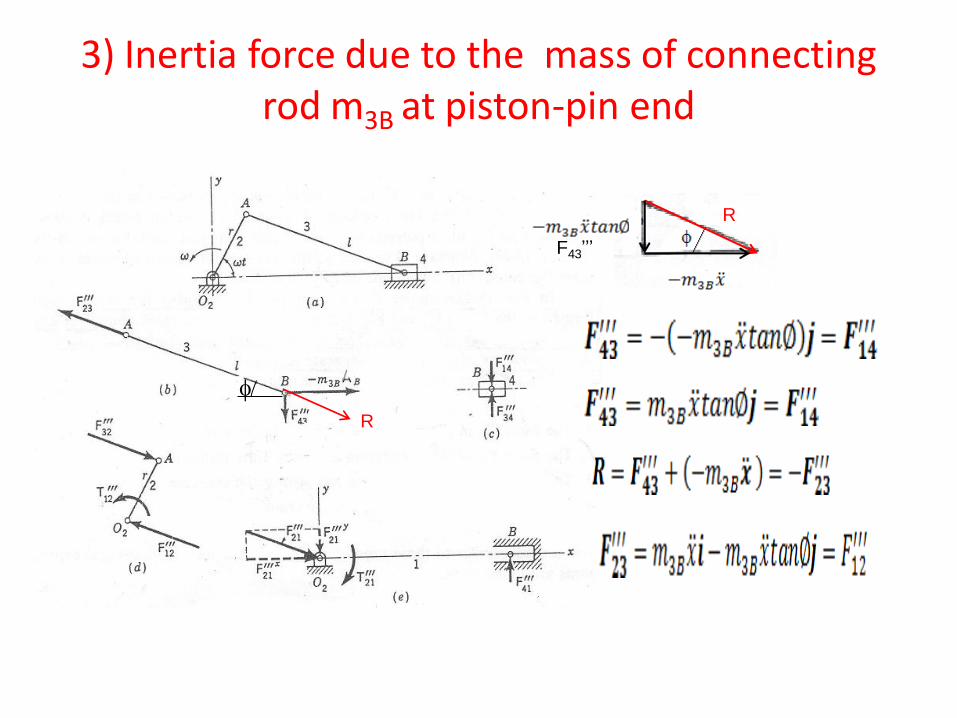
3) Inertia force due to the mass of connecting
rod m3B at piston-pin end
R
F43’’’
R
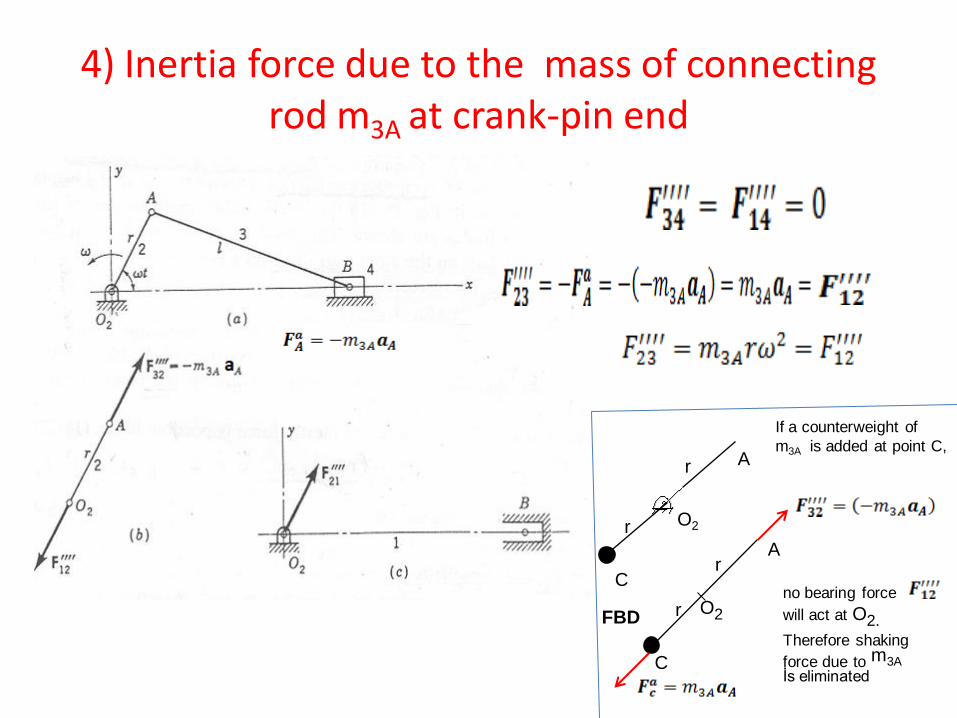
4) Inertia force due to the mass of connecting rod m3A at crank-pin end
O2
r
r
A
If a counterweight of
m3A is added at point C,
O2
A
C
C
r
r
no bearing force
will act at O2.
Therefore shaking
force due to m3A
İs eliminated
FBD
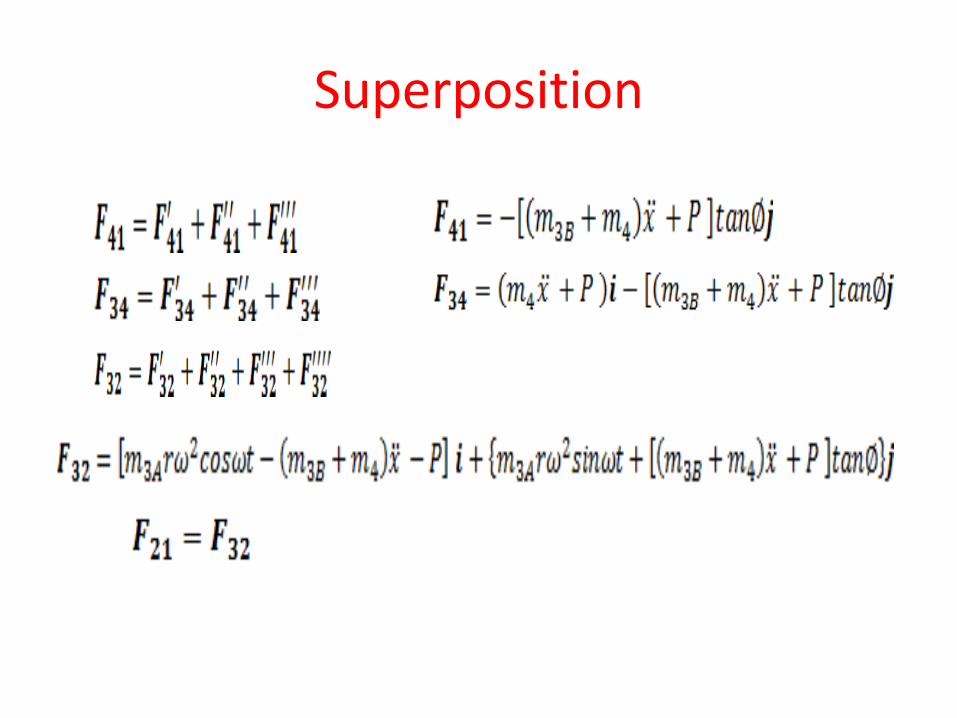
Superposition
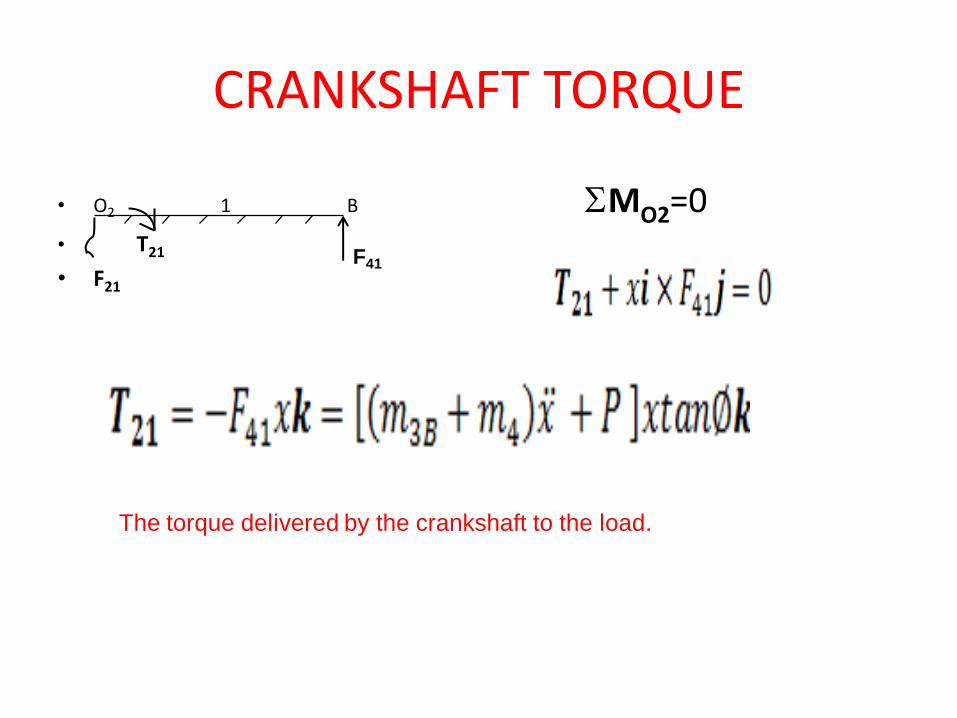
CRANKSHAFT TORQUE
• O2 1 B MO2=0 • T21
• F21
F41
The torque delivered by the crankshaft to the load.
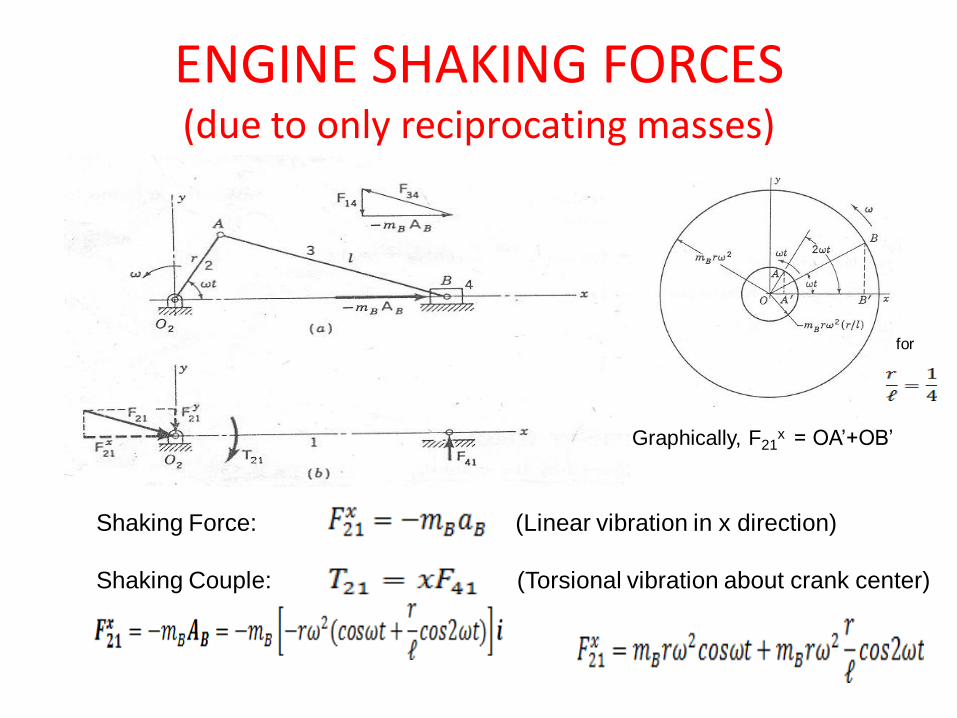
ENGINE SHAKING FORCES (due to only reciprocating masses)
Shaking Force: (Linear vibration in x direction)
Shaking Couple: (Torsional vibration about crank center)
Graphically, F21x = OA’+OB’
for
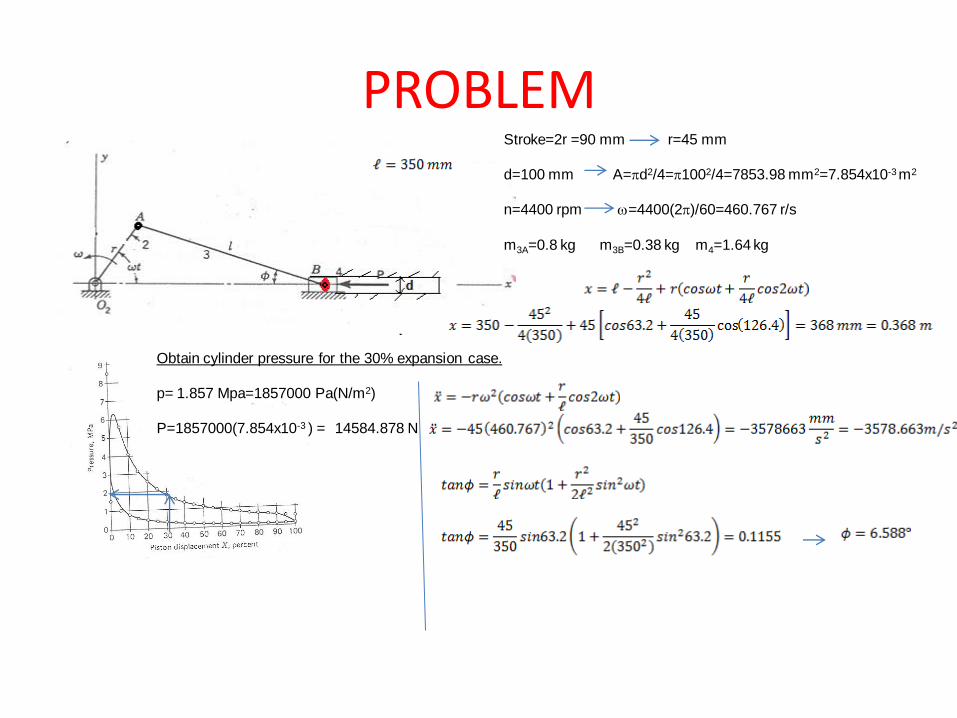
PROBLEM Stroke=2r =90 mm r=45 mm
d=100 mm A=d2/4=1002/4=7853.98 mm2=7.854x10-3 m2
n=4400 rpm =4400(2)/60=460.767 r/s
m3A=0.8 kg m3B=0.38 kg m4=1.64 kg
Obtain cylinder pressure for the 30% expansion case.
p= 1.857 Mpa=1857000 Pa(N/m2)
P=1857000(7.854x10-3 ) = 14584.878 N
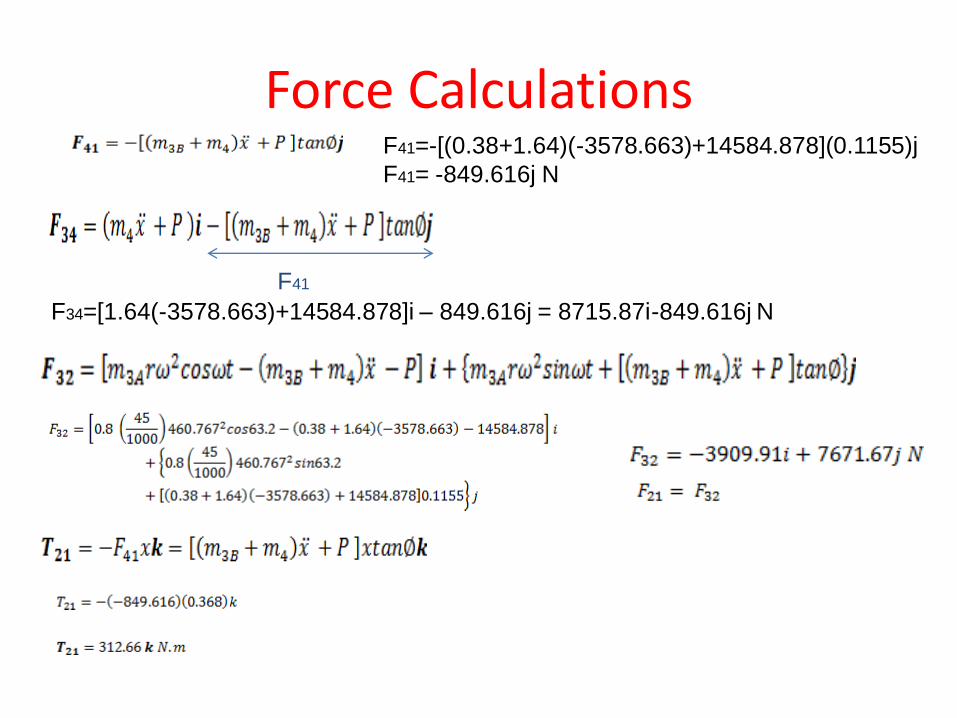
Force Calculations F41=-[(0.38+1.64)(-3578.663)+14584.878](0.1155)j
F41= -849.616j N
F41
F34=[1.64(-3578.663)+14584.878]i – 849.616j = 8715.87i-849.616j N