estudo da biomecânica da mão por aplicação do … · faculdade de engenharia da universidade do...
TRANSCRIPT

Faculdade de Engenharia da Universidade do Porto
Estudo da Biomecânica da Mão por aplicação do
Método dos Elementos Finitos
por
Hélia Maria da Silva Gaspar
Dissertação apresentada à Faculdade de Engenharia da Universidade do Porto para
obtenção do Grau de Mestre em Engenharia Biomédica
Orientador:
Prof. Doutor Renato Manuel Natal Jorge
Setembro 2010


Ao Valdemar e aos meus sobrinhos, Pedro e Vitória
Sempre faço o que não consigo fazer
para aprender o que não sei!
Pablo Picasso


v
Agradecimentos
Agradeço em primeiro lugar ao Prof. Doutor Renato Manuel Natal Jorge, meu
orientador, por toda a ajuda e incentivo para a realização deste trabalho. E por toda a
disponibilidade dispendida durante todo este percurso, sem o qual teria sido
impossível desenvolver uma dissertação neste âmbito
De seguida, agradeço toda a ajuda e disponibilidade do Prof. Doutor Marco Paulo
Lages Parente, por toda a sua ajuda para aprendizagem de utilização do Abaqus, pois
sem tais noções não teria conseguido obter resultados.
Aos meus colegas de gabinete do IDMEC por todo o companheirismo, simpatia e
ajuda durante o decorrer deste trabalho.
Não poderia deixar de agradecer, aos meus pais, pela oportunidade de realizar este
mestrado, e às outras pessoas significativas da minha vida, por terem contribuído de
alguma maneira para o sucesso do meu percurso até aqui, e a todos eles,
simplesmente, por existirem.

vii
Estudo da Biomecânica da Mão por aplicação do
Método dos Elementos Finitos
por
Hélia Maria da Silva Gaspar
Orientador:
Prof. Doutor Renato Manuel Natal Jorge
Resumo
A presente dissertação analisa o comportamento biomecânico da mão humana
recorrendo a técnicas numéricas baseadas no Método dos Elementos Finitos (MEF).
Esta investigação teve como objectivo o estudo biomecânico da mão, através da
simulação do seu movimento. Para tal, procedeu-se ao estudo do movimento de
flexão da mão com o objectivo de preensão de um objecto.
Foi utilizado um modelo da mão constituído por 16 ossos, incluindo, 4 metacarpos
e 12 falanges. As articulações existentes no modelo foram feitas entre as falanges: a
articulação metacarpofalangeal, a articulação interfalangeal proximal e a articulação
interfalangeal distal. As articulações eram compostas por uma cápsula articular e
cartilagens fixas nas extremidades dos ossos referentes às articulações. Com recurso
ao Método dos Elementos Finitos foram feitos estudos de análise dinâmica, incluindo a
obtenção do ângulo de flexão das articulações metacarpofalangeal, interfalangeal
proximal e distal para preensão de um objecto. Na sequência destes ensaios, o modelo
foi analisado de forma a se obterem para as três cápsulas articulares existentes valores
respeitantes às grandezas tensão e deformação, resultantes do movimento de flexão.
De seguida, foram escolhidos 4 pontos diametralmente opostos em cada cápsula
articular, localizados estes na vista posterior, lateral, anterior e medial, e depois foram
recolhidos em cada ponto valores das duas grandezas permitindo, assim, a
comparação destes valores dentro e entre as cápsulas articulares.


ix
Study of the Biomechanics of Hand by applying the
Finite Element Method
by
Hélia Maria da Silva Gaspar
Supervisor:
Ph.D. Renato Manuel Natal Jorge
Abstract
This dissertation examines the biomechanical behavior of human hand using
numerical techniques based on Finite Element Method (FEM). This investigation aimed
to study the biomechanics of the hand, through the simulation of its movement. To
this end, we proceeded to study the flexion movement of the hand in order to hold an
object.
Was used a hand model that consists of 16 bones, including 4 metacarpals and 12
phalanges. The joints in the model were made between the phalanges: the
metacarpophalangeal joint, the proximal interphalangeal joint and distal
interphalangeal joint. The joints were composed of a fixed joint capsule and cartilage
at the ends of the bones related to joints. Using the Finite Element Method were made
dynamic analysis, including obtaining the angle of flexion of the metacarpophalangeal,
proximal and distal interphalangeal joints to hold an object. Following these tests, the
model was analysed in order to obtain for the three existing joint capsules, values
relating to the quantities stress and strain, resulting from the flexion movement. Then
were selected four diametrically opposite points on each joint capsule, located in the
posterior, lateral, anterior and medial view, and were then collected at each point
values of the two quantities, thus enabling a comparison of these values within and
between the capsules joints.


xi
Índice
Resumo vii
Abstract ix
1.Introdução 1
1.1.Ojectivos da dissertação 1
1.2.Apresentação da dissertação 3
2.Biomecânica e Anatomia da Mão 5
2.1.Definição de Biomecânica 5
2.1.2.Conceitos Base 5
2.2.Sistema Músculo-Esquelético 6
2.2.1.Sistema Esquelético 6
2.2.2.Sistema Muscular 7
2.2.2.1.Músculos Esqueléticos 8
2.2.2.2.Controlo motor 8
2.2.3.Tecidos Moles 9
2.2.4.Articulações 10
2.2.5. Termos Anatómicos 10
2.3.Anatomia e cinemática da mão 11
2.3.1.Anatomia da Mão 12
2.3.1.1.Carpo 12
2.3.1.2.Metacarpo 12
2.3.1.3.Falanges 12
2.3.2.Articulações da mão 13
2.3.3.Músculos da Mão 14
2.3.4.Controlo da mão 14
2.3.5.Graus de liberdade 15
2.4.Principais doenças e lesões 15
2.5.Reabilitação 17
3.Modelação por Elementos Finitos 19

xii
3.1.Método dos Elementos Finitos 19
3.1.1.Elemento finito tetraédrico 21
3.1.2.Modelos Constitutivos 26
3.2.Modelação 35
3.2.1.Estudos anteriores 36
3.3.Modelo de Elementos Finitos 39
4.Resultados e Discussão 44
4.1.Cápsula Articular 1 45
4.2.Cápsula Articular 2 49
4.3.Cápsula Articular 3 54
5.Conclusões e Trabalhos Futuros 60
Referências 62

xiii
Lista de Figuras e Tabelas
Figura 1 – Representação óssea da mão humana, vista posterior
Figura 2 – Representação do elemento tetraédrico
Figura 3 – Componentes de tensão de corte relativamente às componentes de
deformação de corte com aumento de deformação
Figura 4 – Diagrama de carga-alongamento
Figura 5 – Malha de elementos finitos utilizada
Figura 6 – Malha de elementos finitos para as cápsulas articulares do dedo IV e V, vista
posterior
Figura 7 – Movimento de flexão da mão para preensão de um objecto
Figura 8 – Local de aplicação da BC-2, BC-3 e BC-4, no dedo II
Figura 9 – Valores das tensões sofridas na cápsula articular 1, durante a flexão do
dedo, dado um ângulo de 15°, vista posterior
Figura 10 – Valores das tensões sofridas na cápsula articular 1, durante a flexão do
dedo, dado um ângulo de 15°, vista lateral
Figura 11 – Valores das tensões sofridas na cápsula articular 1, durante a flexão do
dedo, dado um ângulo de 15°, vista anterior
Figura 12 – Valores das tensões sofridas na cápsula articular 1, durante a flexão do
dedo, dado um ângulo de 15°, vista medial
Figura 13 – Valores das deformações sofridas na cápsula articular 1, durante a flexão
do dedo, dado um ângulo de 15°, vista posterior
Figura 14 – Valores das deformações sofridas na cápsula articular 1, durante a flexão
do dedo, dado um ângulo de 15°, vista lateral
Figura 15 – Valores das deformações sofridas na cápsula articular 1, durante a flexão
do dedo, dado um ângulo de 15°, vista anterior
Figura 16 – Valores das deformações sofridas na cápsula articular 1, durante a flexão
do dedo, dado um ângulo de 15°, vista medial
Figura 17 – Valores das tensões sofridas na cápsula articular 2, durante a flexão do
dedo, dado um ângulo de 100°, vista posterior

xiv
Figura 18 – Valores das tensões sofridas na cápsula articular 2, durante a flexão do
dedo, dado um ângulo de 100°, vista lateral
Figura 19 – Valores das tensões sofridas na cápsula articular 2, durante a flexão do
dedo, dado um ângulo de 100°, vista anterior
Figura 20 – Valores das tensões sofridas na cápsula articular 2, durante a flexão do
dedo, dado um ângulo de 100°, vista medial
Figura 21 – Valores das deformações sofridas na cápsula articular 2, durante a flexão
do dedo, dado um ângulo de 100°, vista posterior
Figura 22 – Valores das deformações sofridas na cápsula articular 2, durante a flexão
do dedo, dado um ângulo de 100°, vista lateral
Figura 23 – Valores das deformações sofridas na cápsula articular 2, durante a flexão
do dedo, dado um ângulo de 100°, vista anterior
Figura 24 – Valores das deformações sofridas na cápsula articular 2, durante a flexão
do dedo, dado um ângulo de 100°, vista medial
Figura 25 – Valores das tensões sofridas na cápsula articular 3, durante a flexão do
dedo, dado um ângulo de 100°, vista posterior
Figura 26 – Valores das tensões sofridas na cápsula articular 3, durante a flexão do
dedo, dado um ângulo de 100°, vista lateral
Figura 27 – Valores das tensões sofridas na cápsula articular 3, durante a flexão do
dedo, dado um ângulo de 100°, vista anterior
Figura 28 – Valores das tensões sofridas na cápsula articular 3, durante a flexão do
dedo, dado um ângulo de 100°, vista medial
Figura 29 – Valores das deformações sofridas na cápsula articular 3, durante a flexão
do dedo, dado um ângulo de 100°, vista posterior
Figura 30 – Valores das deformações sofridas na cápsula articular 3, durante a flexão
do dedo, dado um ângulo de 100°, vista lateral
Figura 31 – Valores das deformações sofridas na cápsula articular 3, durante a flexão
do dedo, dado um ângulo de 100°, vista anterior
Figura 32 – Valores das deformações sofridas na cápsula articular 3, durante a flexão
do dedo, dado um ângulo de 100°, vista medial
Tabela I – Conversão de constantes para um material elástico isotrópico
Tabela II – Propriedades mecânicas do material

Página | 1
Capítulo 1
Introdução
1.1.Ojectivos da dissertação
A mão humana tem sido alvo de estudo desde o início do período da história da
humanidade. A sua arquitectura é um fino exemplo de elegância mecânica na
natureza. Tem sido um fascinante objecto de estudo para os investigadores tanto no
que diz respeito ao controlo motor como à biomecânica. As recentes décadas, têm
testemunhado um avanço na compreensão da anatomia e da biomecânica da mão
humana, mas mesmo assim, apesar de todos os esforços nesse sentido, actualmente, a
complexidade da mão ainda não é totalmente compreendida.(1,2)
No que diz respeito, a estudos da mão já realizados (num sentido mais amplo,
membros superiores), pouquíssimos se têm focado nos membros superiores, pois
existe falta de informação relativa a localizações a três dimensões, a orientações das
ligações de músculos e à orientação dos eixos de rotação das articulações do membro
superior (dada a dificuldade neste tipo de medição/cálculo).(3)
Actualmente, existe um método designado de Método dos Elementos Finitos (MEF)
que se trata da ferramenta mais poderosa para simular problemas mecânicos,
permitindo uma análise de meios discretos e contínuos, com alto nível de
complexidade, a partir de modelos geométricos.(4,5)
Dado o facto da medição directa de determinadas estruturas não ser possível, a
modelação biomecânica apresenta-se com uma solução alternativa para medição
indirecta de determinadas forças.(6)
Com este trabalho, pretende-se dar um contributo para a melhor compreensão da
biomecânica da mão. Uma vez que, a medição de forças e outras componentes
directamente na mão nem sempre é possível e pode ser afectada por diversos factores

Capítulo 1 - Introdução
Página | 2
externos, a simulação dos movimentos da mão através da utilização do MEF, torna-se
de elevada importância e é um método bastante fiável.
Como tal, o objectivo desta investigação é simular e obter resultados relativos aos
movimentos da mão, mais propriamente, relativos ao movimento de flexão,
movimento este tão precioso para a preensão de objectos.
Neste trabalho de investigação, foi utilizada um modelo da mão constituído por 16
ossos, incluindo, metacarpos, falanges, cartilagens e cápsulas articulares, e a partir
deste testaram-se as forças geradas durante o movimento de flexão. O polegar ainda
que modelado, foi considerado como elemento rígido.

Capítulo 1 - Introdução
Página | 3
1.2.Apresentação da dissertação
No capítulo 2 é feita uma abordagem à biomecânica e anatomia da mão. Neste é
descrito, de forma geral, do que trata a biomecânica, assim como, os conceitos base
associados a esta. De seguida, é feita uma descrição do sistema músculo-esquelético,
incluindo, dos seus vários componentes, nomeadamente, sistema esquelético, sistema
muscular, controlo motor, tecidos moles e articulações, e ainda é feita uma breve
explicação de termos anatómicos. Após a descrição do sistema músculo-esquelético,
são apresentados os principais aspectos da mão, referenciando os seus diversos
componentes, designadamente, carpo, metacarpo, falanges, articulações existentes e
músculos constituintes, e ainda o modo como esta é controlada internamente pelo
sistema nervoso central e o número de graus de liberdade associado. Dado o facto, do
ser humano ser susceptível ao aparecimento de doenças são apresentadas algumas
doenças e lesões que podem afectar o normal funcionamento da mão. E na sequência
deste, são descritos métodos actuais que podem ajudar na recuperação total ou
parcial de défices existentes no funcionamento da mão.
No capítulo 3 são apresentados os principais aspectos que se relacionam com o
Método dos Elementos Finitos (MEF), iniciando por uma breve descrição do que é este
método e suas características, seguido da descrição do tipo de elemento utilizado no
presente modelo, designadamente, elemento tetraédrico de quatro nós, e por último,
é feita uma breve introdução aos modelos constituintes, incluindo, a elasticidade e a
hiperelasticidade. No seguimento deste tema, é feita uma revisão aos estudos já
efectuados, até aos dias de hoje, sobre modelação. De seguida, descreve-se a
construção prévia do modelo da mão, que engloba 16 ossos, incluindo metacarpos,
falanges, cartilagens, cápsulas articulares e pele. Posteriormente, foram escolhidos
pontos-chave nos dedos, nomeadamente, nos locais de articulação entre os
metacarpos e falanges adjacentes e entre as falanges, de modo a ser aplicada uma
rotação nestes locais, através da aplicação do MEF.
No capítulo 4 encontram-se apresentados os resultados obtidos através deste
modelo, nomeadamente, as tensões e deformações geradas aquando do movimento

Capítulo 1 - Introdução
Página | 4
de flexão do dedo indicador. Assim como, uma posterior análise e discussão a estes
mesmos resultados.
No capítulo 5 foi feita uma breve síntese de todo o trabalho desenvolvido,
englobando as respectivas conclusões, terminando este com algumas sugestões de
possíveis trabalhos futuros.

Página | 5
Capítulo 2
Biomecânica e Anatomia da Mão
2.1.Definição de Biomecânica
Biomecânica é a ciência que lida com as forças e seus efeitos, aplicados aos
sistemas biológicos, permitindo, assim, o estudo do corpo humano a qualquer nível, ou
seja, desde um nível macro até ao tamanho de uma única célula.
A Biomecânica encontra-se baseada nos princípios da Física e da Matemática. Este
conceito surgiu há vários séculos. Uma das primeiras observações foi feita, por volta
do ano de 1500, por Leonardo da Vinci, que observou do ponto de vista biomecânico a
função dos músculos e ossos que constituem o corpo humano. Com o passar dos anos,
foram surgindo diversas descobertas nesta área de estudiosos de renome, tais como,
Galileu, Newton, Descartes, entre outros. Mais recentemente, na década de 70, a
disciplina de Biomecânica cruzou-se com a disciplina de Ergonomia, que é a ciência que
estuda o Homem e o seu trabalho, de forma, a ser possível através do recurso a
princípios biomecânicos redesenhar ferramentas de trabalho com o objectivo de
proporcionar melhores condições de trabalho e menos riscos para os trabalhadores.
Mais tarde, começou-se também a ter em especial atenção as doenças músculo-
esqueléticas resultantes do trabalho.(7)
2.1.2.Conceitos Base
Os princípios da Biomecânica podem ser aplicados a corpos em repouso,
denominados, assim, de estáticos, ou a corpos em movimento, denominados, neste
caso, de dinâmicos. Em ambas as situações, os corpos podem ser sujeitos a acções de
forças (por exemplo: os corpos podem ser empurrados ou puxados). Estas forças

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 6
actuam sempre em uníssono, para qualquer acção há sempre uma reacção igual e
oposta.
A dinâmica, por sua vez, pode ser dividida em cinemática e cinética. A cinemática é
o estudo do movimento puro, deslocamento, velocidades e aceleração. Por outro lado,
a cinética estuda as forças que promovem esse movimento.(7)
2.2.Sistema Músculo-Esquelético
O sistema músculo-esquelético é um complexo sistema de músculos, ossos e
tecidos moles que proporcionam movimento ao corpo humano.
Cada indivíduo tem um sistema músculo-esquelético próprio, o qual se caracteriza
por propriedades dinâmicas únicas, tais como, dimensões geométricas e a distribuição
de massa entre os segmentos.(7,8,9)
2.2.1.Sistema Esquelético
O esqueleto humano de um adulto é constituído por cerca de 206 ossos, cada um
com um importante papel para a funcionalidade do sistema esquelético. Este sistema
tem várias funções, nomeadamente, suporte, protecção dos órgãos internos,
movimento corporal, hematopoiese (processo de formação de células sanguíneas) e
armazenamento de gordura e de minerais.
Os ossos possuem diferentes formas, tamanhos e propriedades mecânicas. Estes
podem ser agrupados com base na sua forma, em quatro categorias:
1. Ossos longos - são mais longos/compridos do que largos (por exemplo: ossos
do metacarpo) e funcionam como alavancas;
2. Ossos curtos - têm uma forma semelhante a um cubo e podem ser
encontrados no pulso e tornozelo onde transferem as forças do movimento;
3. Ossos planos - têm uma ampla superfície, quer para a ligação dos músculos
quer para protecção dos órgãos subjacentes (por exemplo: as costelas);

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 7
4. Ossos irregulares – tal como o nome indica estes possuem diversas formas e
aspectos superficiais para a ligação dos músculos ou articulações (por
exemplo: as vértebras).
O material ósseo é composto por células, por uma matriz extracelular de fibras e
por uma substância base. As células produzem a matriz extracelular, a qual determina
as propriedades mecânicas do osso. É de salientar que, a rigidez e a força são
importantes propriedades mecânicas do osso (o efeito combinado das fibras e da
substância base produz um efeito adicional na força).(7,8,9,10,11)
2.2.2.Sistema Muscular
No corpo humano existem mais de 500 músculos. Estes compreendem
aproximadamente 50% do peso corporal e 50% da actividade metabólica do
organismo.
O músculo consiste em tecido conjuntivo na forma de fáscia, células musculares na
forma de fibras musculares e nervos. Uma camada externa de fáscia, o epimísio,
recobre o músculo, camadas internas de fáscia, o perimísio, subdivide feixes de fibras
musculares em fascículos, e camadas mais interiores de fáscia, o endomésio, recobrem
fibras musculares individuais. A fáscia que liga fibras ou grupos de fibras estende-se
até ao fim do músculo e ajuda-o e às fibras musculares a agarrarem-se firmemente ao
osso, sob a forma de tendões. Esta distribuição da fáscia através do músculo é muito
importante para a transmissão da força de uma forma uniforme, desde as unidades
contrácteis activas até ao tendão e ao osso. Os músculos vão-se ligar aos ossos
propiciando assim a base do movimento. O tecido muscular é penetrado por vasos
sanguíneos finos que transportam oxigénio e nutrientes às fibras musculares e por
pequenas terminações nervosas que trazem os impulsos eléctricos do cérebro e da
espinal medula.
Os músculos dividem-se em: músculos esqueléticos (que se ligam aos ossos),
músculos cardíacos (que se podem encontrar no coração) e músculo liso (o qual
podemos encontrar nos órgãos internos e nas paredes dos vasos sanguíneos).(7,8,9,10,11)

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 8
2.2.2.1.Músculos Esqueléticos
Este tipo de músculos é o mais importante no que diz respeito ao movimento, por
isso, apenas estes aqui são descritos em detalhe. Os músculos esqueléticos estão
ligados aos ossos em ambos os lados da articulação através de tendões. Estes têm
como função movimentar os ossos e para isso, devido às suas características,
normalmente, existem sempre dois grupos de músculos: os agonistas, que contraem o
músculo (são os actuadores primários do movimento); e os antagonistas, que
retornam o músculo à posição original (opõem-se ao movimento). Enquanto um grupo
de músculos se encontra activo, o grupo oposto encontra-se relaxado.(7,8,9,10,11)
2.2.2.2.Controlo motor
O controlo motor dos músculos inicia-se no Sistema Nervoso Central (SNC). O SNC
inclui o cérebro, que se encontra dentro do crânio e é protegido por este, e a espinal
medula, que passa dentro da coluna vertebral e se encontra protegida por esta. O
cérebro pode ser subdividido em várias áreas, cada uma contém um grupo de células
nervosas com determinada função. Para aumentar o controlo motor e outras
capacidades nervosas de processamento, o cérebro desenvolveu invaginações
profundas, que aumentam bastante a área de superfície para a existência de células
nervosas. Numa destas áreas, encontra-se o córtex sensório-motor, o qual possui uma
parte motora onde se originam os sinais que controlam a actividade muscular, e uma
parte sensitiva, a qual recebe sinais de feedback dos músculos e de outras partes do
corpo.(7,8)
Para uma melhor compreensão, de seguida, encontra-se descrito como é
processado o controlo motor de um modo simplificado. A função neuromuscular é a
interacção entre o sistema nervoso e o mundo físico. Tendo em conta o sentido
descendente (cérebro→músculos): as ordens são geradas no córtex motor (lobo
frontal, localizado na região anterior do cérebro), ao qual é enviada a informação
quanto ao movimento a gerar e, posteriormente, estas são enviadas até ao neurónio

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 9
motor (localizado no músculo). Este neurónio motor activa o músculo, e o músculo,
por sua vez, gera força e isto resulta em movimento.(12)
2.2.3.Tecidos Moles
Os tecidos moles do corpo humano compreendem estruturas como os ligamentos,
tendões, fáscia e cartilagem, que fornecem suporte e integridade estrutural ao sistema
músculo-esquelético e que transmitem as forças entre os diversos componentes. Todo
o tecido conjuntivo, semelhante aos ossos, é composto por células, uma matriz
extracelular de fibras e uma substância base. Existem três tipos de fibras: o colagéneo,
a elastina e a reticulina. O colagéneo garante força e rigidez ao tecido, a elastina
propicia elasticidade e a reticulina confere volume.
Os ligamentos ligam osso a osso e garantem estabilidade às articulações. Estes são
compostos por cerca de 90% de colagéneo, os quais possuem um arranjo das fibras em
linha recta e têm reduzida elasticidade (podem apresentar elevados valores de
rigidez).
Os tendões ligam o músculo ao osso, transmitindo, assim, a força muscular. A sua
constituição é quase na totalidade por feixes de fibras de colagéneo paralelos sem
qualquer elasticidade. Estes encontram-se rodeados por uma bainha sinovial, a qual
produz um fluido sinovial de baixa fricção para facilitar o deslizamento dos tendões. O
arranjo paralelo é ideal para a transmissão de força no sentido axial.
A fáscia é tecido conjuntivo que recobre os órgãos e músculos. É altamente elástica
(pois tem uma percentagem elevada de elastina), com um arranjo bastante irregular
das fibras, o que lhe permite ter elasticidade em todas as direcções.
A cartilagem recobre as superfícies articulares dos ossos. Esta pode ser dividida em
três tipos principais: cartilagem hialina (encontra-se nas extremidades dos ossos e
trata-se de uma matriz homogénea de fibras de colagéneo), fibrocartilagem (presente
nos discos intervertebrais e é composta por colagéneo e elastina) e cartilagem elástica
(encontra-se no ouvido e na epiglote da garganta).(7,8,9,10,11)

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 10
2.2.4.Articulações
Uma articulação é o ponto de interacção entre dois ou mais ossos. As articulações
do corpo encontram-se agrupadas, segundo a sua estrutura, em três categorias
principais:
1. Articulações fibrosas – os ossos em questão encontram-se ligados por tecido
conjuntivo fibroso;
2. Articulações cartilaginosas – os ossos estão ligados por cartilagem;
3. Articulações sinoviais – os ossos encontram-se recobertos por cartilagem e
os ligamentos ajudam a suportá-los (este tipo de articulação distingue-se
pelo facto das cavidades articulares se encontrarem preenchidas por um
fluido). Neste caso, os ossos funcionam como alavancas, ou seja, os
músculos proporcionam a força e as articulações são os pivôs. Este tipo de
articulações torna possível um grande e diversificado número de
movimentos.(7,8,9,10,11)
2.2.5. Termos Anatómicos
A terminologia apresentada irá permitir descrever a localização de partes e regiões
do corpo e de planos imaginários pelos quais o corpo pode ser seccionado. Este
conhecimento é essencial para possibilitar uma comunicação efectiva.
Os termos anatómicos são úteis apenas se todos tiverem em mente a mesma
posição do corpo e estiverem a usar os mesmos pontos de referência. Para tal,
assume-se que o corpo está na posição anatómica, pois esta possibilita uma referência
precisa e standard para descrição e dissecção anatómica. A posição anatómica refere-
se a uma pessoa estando erecta com a face direccionada para a frente, os membros
superiores ao lado do corpo e com as palmas das mãos viradas para a frente.
Recorrendo a esta posição e à terminologia adequada, qualquer parte do corpo pode
ser precisamente relacionada com qualquer outra parte. Por exemplo: na posição
anatómica, o cotovelo encontra-se acima da mão, em decúbito dorsal, o cotovelo e a

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 11
mão estão ao mesmo nível. Para evitar confusão, descrições relacionais são sempre
baseadas na posição anatómica, independentemente, da actual posição corporal.
De forma, a facilitar a interpretação deste trabalho, de seguida, são descritos os
termos direccionais utilizados na prática corrente. Os termos direccionais são usados
para descrever a localização de qualquer parte do corpo em relação a outra. Os termos
direito e esquerdo mantêm-se como termos direccionais na terminologia anatómica.
Acima é substituído por superior, abaixo por inferior, frente por anterior (ou ventral) e
trás por posterior (ou dorsal). Proximal significa mais perto, enquanto que por sua vez
distal significa mais longe (estes termos referem-se, normalmente, a estruturas
lineares, tais como, os membros, nos quais uma extremidade está próxima de outra
estrutura – proximal – e a outra extremidade está afastada - distal). Medial significa
que se encontra mais próximo da linha média do corpo e lateral que se encontra mais
afastado da linha média. O termo superficial refere-se a uma estrutura próxima da
superfície do corpo e profundo refere-se ao interior do corpo.(8,9,10,11)
2.3.Anatomia e cinemática da mão
A mão humana tem sido alvo de estudo desde o início do período da história. A
época da Renascença marcou uma nova era na procura de um profundo conhecimento
da anatomia da mão humana, quer por artistas, quer por físicos. O fascínio de
Leonardo da Vinci (1452-1519) pela anatomia da mão é óbvio na sua arte. O trabalho
“De humani corporis fabrica” de Andreas Vesalius em 1543, dinamizou para um novo
nível a exploração da anatomia da mão, com muitas gravuras dedicadas a esta. As
recentes décadas têm testemunhado um enorme salto em frente na compreensão da
anatomia e da biomecânica da mão humana.
Como é facilmente perceptível nos parágrafos anteriores, a complexidade da mão é
lendária. Apesar de todos os esforços nesse sentido, actualmente, a complexidade
neuro-músculo-esquelética da mão ainda não é totalmente compreendida.(1,2)

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 12
2.3.1.Anatomia da Mão
A arquitectura da mão é um fino exemplo de elegância mecânica na natureza. A
sua estrutura é um sistema interligado de segmentos de ossos, dispostos numa série
de arcos transversais e longitudinais. Basicamente, existem dois arcos transversos (o
arco transverso proximal, formado pelos ossos do carpo, e o distal, que é formado
pelas cabeças dos ossos do metacarpo) e arcos longitudinais, os quais consistem nos
cinco raios dos dedos. Este arranjo da mão através de arcos fornece uma boa estrutura
base. A mão contém vinte e sete ossos, agrupados no carpo, metacarpo e
falanges.(1,2,7,8,13,14)
2.3.1.1.Carpo
O carpo, ou vulgarmente denominado pulso, é constituído por oito ossos dispostos
em duas linhas transversas, com quatro ossos cada. A linha proximal (mais próxima da
linha média do corpo) consiste no escafóide, semilunar, piramidal e pisiforme (visto do
lado lateral para o medial). A linha distal (mais afastada da linha média do corpo)
consiste no trapézio, trapezóide, capitato e uncinado (visto do lado lateral para o
medial).(7,8,13,14)
2.3.1.2.Metacarpo
O metacarpo contém cinco ossos. Cada osso do metacarpo tem uma base proximal,
um corpo e uma cabeça distal (a qual é rodeada pela articulação que a articula com a
base de cada falange proximal).(7,8,13,14)
2.3.1.3.Falanges
As catorze falanges, existentes na mão, constituem os ossos dos dedos. Um único
osso dos dedos denomina-se falange. As falanges das mãos encontram-se dispostas
em três linhas, nomeadamente, linha proximal, linha média e linha distal. O polegar

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 13
não contém a linha média. Os dedos são numerados sequencialmente de I até V,
começando a numerar-se pelo polegar.(7,8,13,14)
Figura 1- Representação óssea da mão humana, vista posterior (15)
2.3.2.Articulações da mão
Devido ao elevado número de ossos na mão, também existe um grande número de
ligações e tipos de movimentos possíveis. Por isto, a mão é um óptimo aparelho de
manipulação e muito difícil de replicar artificialmente.
Relativamente à mão podem ser definidas três articulações: articulação do pulso,
metacarpofalangeal (MF) e interfalangeal (IF).
A movimentação da articulação do pulso necessita da contribuição dos oito ossos
do carpo, localiza-se, tal como o próprio nome indica, no pulso e articula a mão com o
antebraço.
A articulação metacarpofalangeal e a interfalangeal são articulações do tipo
sinovial. A MF faz a articulação entre os ossos do metacarpo e as falanges proximais,

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 14
enquanto que a IF trata da articulação entre as falanges adjacentes, dividindo-se em
interfalangeal proximal e distal.
A flexão da MF e da IF faz com que os dedos se aproximem da palma, enquanto
que a sua extensão descreve o movimento de afastamento dos dedos da palma da
mão. O movimento de afastamento perpendicular do polegar da palma é a abducção,
sendo assim, a aducção é o movimento oposto.(7,8,13,14)
2.3.3.Músculos da Mão
Os músculos que produzem o movimento dos dedos encontram-se divididos em
dois grupos, baseados na origem dos músculos: extrínsecos e intrínsecos.
Os músculos extrínsecos originam-se maioritariamente no antebraço, são maiores
e proporcionam força. Estes dividem-se em flexores e em extensores. A maioria dos
flexores tem origem na extremidade distal e medial do úmero, em oposição aos
extensores que têm origem na extremidade distal e lateral do úmero. Ambos têm
inserção nos ossos do carpo, metacarpo ou falanges.
Os músculos intrínsecos têm como origem maioritária a mão, são pequenos e
propiciam coordenação precisa aos dedos. Estes são divididos em três grupos de
músculos: grupo tenar (actua no polegar), grupo hipotenar (actua no V dedo) e o grupo
intermediário (este age em todas as falanges, excepto no polegar). Localizados
principalmente no lado palmar, estes músculos permitem a flexão/extensão e
abducção/aducção de cada falange, dando origem a movimentos precisos dos dedos.
Cada dedo é enervado por ambos os grupos de músculos, necessitando de uma boa
coordenação entre estes para movimentarem a mão adequadamente.(7,8,13,14)
2.3.4.Controlo da mão
Os membros e os dedos são os últimos filtros mecânicos entre as ordens motoras
provenientes do sistema nervoso e as acções físicas que delas resultam. O termo filtros
mecânicos deve-se ao facto destes atenuarem, amplificarem e transformarem os sinais
nervosos em outputs mecânicos. É de salientar que as pequenas diferenças anatómicas

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 15
entre os membros e os dedos têm efeitos profundos nas suas propriedades mecânicas.
Muitos aspectos da função neuromuscular, como a selecção de postura e a
optimização da ordem motora, são fundamentalmente afectados pela estrutura física
dos membros e dedos. A estrutura anatómica dos membros e dedos interioriza como
inputs as acções musculares e produz como outputs movimentos e forças.(16,17)
2.3.5.Graus de liberdade
Uma importante característica da mão humana é o número de graus de liberdade
calibrados pelos seus movimentos. Os graus de liberdade podem ser definidos como o
número mínimo de coordenadas independentes para descrever a posição de um
sistema. Anatomicamente, os cinco dedos da mão compreendem quinze articulações
que oferecem cerca de vinte graus de liberdade. No entanto, a medida em que cada
um destes graus de liberdade é independentemente controlado durante o movimento
não é conhecido e por isso tem sido objecto de estudo em laboratório. Sabe-se, por
exemplo, que a arquitectura mecânica da mão coloca obstáculos ao controlo
independente dos dedos. A arquitectura neuromuscular da mão parece também
limitar o grau de controlo independente. Além disso, pensa-se que o sistema motor
pode empregar sinergias para reduzir a dimensionalidade da mão e, assim, simplificar
o problema de controlo da mão pelo sistema motor. Estudos já existentes prevêem
que a dimensionalidade da mão humana seja inferior a vinte graus de liberdade.(4,5,18)
2.4.Principais doenças e lesões
Hoje em dia, algumas das doenças existentes e que afectam o normal
funcionamento do corpo humano relacionam-se com a postura, layout físico, design de
teclados, entre outros. Por exemplo, a excessiva utilização do computador pode
resultar num risco aumentado de se virem a desenvolver doenças músculo-
esqueléticas dos membros superiores.(19) Os factores de risco biomecânicos mais
comuns, relacionados com o trabalho, são: forças elevadas, elevada repetição do
movimento, vibração, exposição ao frio, uso de ferramentas manuais, posturas

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 16
desadequadas, aceleração e muitas horas de uso de um teclado. Por exemplo, a
combinação da força e repetição (que são os dois maiores factores de risco), pode
aumentar 30 vezes ou mais o risco de lesão.(7)
Existem várias doenças que podem afectar o normal funcionamento dos membros
superiores, atingindo de forma mais ou menos selectiva um ou mais constituintes da
mão, como por exemplo, os músculos, os nervos, os ossos e cartilagens.(7,14)
As doenças musculares iniciam-se por um simples músculo dorido ou dor, o que se
designa de mialgia. Isto pode evoluir para inflamação do músculo e tornar-se algo mais
grave. Por exemplo, contracção muscular repetitiva e excessiva pode levar à chamada
garra do escrivão. Este problema é exacerbado por outras doenças, nomeadamente,
pelo Síndrome do Túnel Cárpico (lesão de um nervo, cuja compressão se encontra
localizada no carpo), o qual reduz o feedback sensitivo.(7,14)
As doenças mais importantes e frequentes que afectam as articulações são a
artrite reumatóide, que se trata de um processo inflamatório generalizado, associado,
normalmente, a outros problemas, tais como, gota e a osteoartrite, que é um processo
degenerativo da cartilagem das articulações.(7,8,14)
Lesões da mão causadas por problemas derivados, por exemplo, pelo uso de
objectos de baixa ergonomia (objectos não ajustados ao trabalho em questão) são a
causa de problemas sociais para o indivíduo lesado.(20)
No entanto, os principais problemas relacionados com as disfunções da mão estão
fortemente ligados a acidentes, quer de viação quer de trabalho. Uma das lesões mais
frequentes, derivada a acidentes de viação com motas, é a lesão do plexo braquial, que
pode causar a perda parcial ou completa da funcionalidade do membro superior. É de
referir, ainda, que as paralisias do membro superior têm sérias consequências
socioeconómicas, pois pacientes com este tipo de lesão deixam de executar
actividades bimanuais, ou seja, actividades usando as duas mãos, e devido a isso
muitos ficam fora do mercado de trabalho.(20)

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 17
2.5.Reabilitação
Dado o elevado número de lesões/doenças que afectam o normal funcionamento
do membro superior, em particular, a mão, torna-se de extrema importância o
desenvolvimento constante de novas técnicas e métodos de reabilitação dos mesmos.
Hoje em dia, já existe um vasto conjunto de meios para reabilitar indivíduos com
este género de incapacidade. Mas infelizmente, ainda existem muitos problemas para
os quais não existe resposta. É de elevada importância a investigação no sentido de
restaurar a função e minimizar os efeitos das lesões/doenças, ou no sentido de se
criarem equipamentos mais ergonómicos.
O tratamento básico médico, nestes casos, baseia-se na assistência ao doente com
o tratamento mais efectivo, o qual deve de ser de baixo custo, com poucos efeitos
secundários e que permita a este regressar à sua vida normal e ao seu local de
trabalho, o mais rapidamente possível e com o mínimo de dor. A estratégia de
tratamento segue um plano que começa pelas soluções mais simples (exemplos:
restrição de movimentos, aplicação de calor e/ou frio, exercícios, medicamentos e
injecções), podendo progredir, caso necessário, para tratamentos mais elaborados,
sendo a cirurgia o último recurso a adoptar.
Com o evoluir da tecnologia, de forma a melhorar a intervenção médica, foram
desenvolvidos novos componentes, com o intuito de melhorar a qualidade de vida
destes indivíduos.
A capacidade para realizar movimentos finos requer o controlo de sub-movimentos
que recorrem a acções musculares individualizadas. Esta capacidade é afectada após
paralisia central envolvendo o membro superior. Para estes casos, foram
desenvolvidas ferramentas sensório-motoras que proporcionam biofeedback útil de
articulações isoladas e da actividade muscular para melhorar os programas de
reabilitação. De um ponto de vista mais amplo, estas ferramentas podem ajudar na
caracterização da incapacidade dos indivíduos, na escolha do tratamento mais
adequado e no seguimento do progresso do doente.(7)
Sistemas neuroprotéticos restauram a função após lesão da medula espinal a nível
cervical recorrendo à combinação de estímulos eléctricos funcionais (FES) e de
cirurgias reconstrutivas, que tendem a fazer transferência de tendões. Um sistema FES

Capítulo 2 – Anatomia e Biomecânica da Mão
Página | 18
consiste num controlador que debita a excitação muscular necessária para uma tarefa
específica em eléctrodos, que depois transmitem a estimulação aos músculos
paralisados apropriados. Até à data, as neuropróteses do membro superior têm-se
focado na restauração da função da mão em indivíduos com lesões cervicais (entre o
nível C5 e C8), através da utilização de controladores open-loop que são testados
usando o método por tentativa e erro. Em indivíduos com lesões a nível de C1 a C4, a
experimentação é praticamente impossível, por isso, torna-se necessário o
desenvolvimento e utilização de modelos músculo-esqueléticos para testar este tipo
de próteses, minimizando assim a inconveniência para os indivíduos. Este tipo de
modelos permite estudar diferentes tipos de movimentos e estimular diferentes
grupos de movimentos, assim como, possibilita simular a existência de diferentes
patologias.
Os estudos biomecânicos da mão poderão ser uma ferramenta preciosa na
elaboração de projectos de dispositivos auxiliares de reabilitação. Por exemplo, o
recurso a meios de engenharia assistida por computador, baseada no Método dos
Elementos Finitos, poderá auxiliar no dimensionamento de ortóteses funcionais que
dependem muito do tipo de patologia e do grau de disfunção de cada paciente. Estes
meios poderão, assim, ajudar na melhoria de um conjunto de problemas,
proporcionando um incremento na qualidade de vida diária dos doentes.(21)

Página | 19
Capítulo 3
Modelação por Elementos Finitos
3.1.Método dos Elementos Finitos
O Método dos Elementos Finitos (MEF) é um método matemático que consiste na
discretização (subdivisão) de um meio contínuo em pequenos subdomínios
(elementos), mantendo as mesmas propriedades do meio original. O comportamento
destes elementos pode ser descrito por equações diferenciais e resolvido por modelos
matemáticos, através de uma análise computacional, para que sejam obtidos os
resultados desejados. A origem deste recurso remonta ao final do século XVIII.
Entretanto, a sua enorme viabilização tornou-se possível com o advento dos
computadores, facilitando, desta forma, a resolução de equações algébricas complexas
e em número elevado.
Com o grande desenvolvimento que o MEF teve na década de 60 e com a
banalização do recurso ao computador, passou a ser prática corrente a análise de
estruturas de geometria arbitrária, constituídas por múltiplos materiais e sujeitas a
qualquer tipo de carregamento. Este método pode ser utilizado em diversas áreas das
ciências exactas e biológicas e, devido à sua grande aplicabilidade e eficiência,
existindo trabalhos baseados nesta metodologia com o objectivo de análise de cargas,
tensões ou deslocamentos.
Um elemento finito é uma sub-região de um meio contínuo com um tamanho finito
(não infinitesimal). Os pontos onde os elementos se conectam são chamados nós, ou
pontos nodais, e o procedimento de selecção de nós e formação dos elementos finitos
é chamado discretização.
O MEF permite converter um problema com um número infinito de graus de
liberdade num outro problema com um número finito, de forma a simplificar o
processo de resolução. Fornece, ainda, uma solução aproximada baseada numa função
para o campo de deslocamentos, numa função para o campo de tensões ou numa

Capítulo 3 – Modelo de Elementos Finitos
Página | 20
mistura de ambas, dentro de cada elemento finito, designadas, regra geral, por
funções de forma.
Uma análise estrutural do MEF inclui os seguintes passos:
1. Discretização da estrutura – o meio contínuo (geometria) subdividido em
elementos finitos;
2. Os elementos são conectados por um número discreto de pontos nodais
situados nas suas fronteiras;
3. Definição das propriedades materiais dos elementos;
4. Escolha de um conjunto de funções para definir o campo de deslocamentos,
dentro de cada elemento finito, em termos dos seus deslocamentos nodais;
5. As funções de forma permitem interpolar o campo de deslocamentos no
interior do elemento a partir dos deslocamentos nodais. Posteriormente é
possível obter o campo de deformações que em conjunto com as
deformações iniciais e as propriedades constitutivas do material definem o
estado de tensão para qualquer ponto do elemento;
6. Agrupamento de matrizes de massa, de amortecimento e de rigidez, que são
derivadas de um método de energia baseado em funções de forma. Estas
matrizes relacionam o deslocamento nodal, velocidade e aceleração com as
forças aplicadas sobre os nós;
7. Determinação de um sistema de forças concentradas nos nós equivalentes
às cargas distribuídas (como, por exemplo, o peso próprio);
8. Aplicação de cargas – forças ou momentos aplicados externamente de forma
concentrada ou distribuída;
9. Definição de condições fronteira;
10. Resolução de sistemas de equações algébricas lineares;
11. Cálculo de tensões, reacções, modos naturais ou cálculo de outra variável de
interesse;
12. Graus de liberdade do problema – estes podem ser definidos como o
número de variáveis nodais (incógnitas) do problema.(4,5)

Capítulo 3 – Modelo de Elementos Finitos
Página | 21
3.1.1.Elemento finito tetraédrico
A três dimensões, trata-se do elemento contínuo mais simples correspondente a
um tetraedro, um elemento de quatro nós.
Na análise de elementos finitos aproxima-se o corpo como um conjunto de
elementos finitos discretos interligados em pontos nodais nas fronteiras dos
elementos. Os deslocamentos medidos no sistema coordenado , e em cada
elemento são assumidos como função dos deslocamentos em pontos no elemento.
Seja um elemento tetraédrico , , m, , num espaço definido pelas coordenadas ,
e (Figura 2). O estado de deslocamento dum ponto é definido pelas três
componentes deslocamento local , , , nas direcções das três coordenadas , ,
.(4)
Assim,
Figura 2 – Representação do elemento tetraédrico
A variação linear é definida por quatro valores nodais, podendo ser escrita, por
questão de simplicidade apenas por , da seguinte forma:
(1)
p
j
i m
x
z
y

Capítulo 3 – Modelo de Elementos Finitos
Página | 22
A equação (1) deve ser válida para qualquer ponto do elemento incluindo os
respectivos nós, ou seja:
Em que se calculam , .
É possível escrever esta solução, usando a forma determinante, isto é:
Com,
Em que representa o volume do tetraedro.
Expandindo os outros determinantes relevantes nos seus co-factores obtém-se:
O deslocamento do elemento é definido por 12 componentes de deslocamento dos
nós como:
(2)
(3)
(6)
(4)
(5)

Capítulo 3 – Modelo de Elementos Finitos
Página | 23
Com,
Os deslocamentos de um ponto arbitrário do elemento podem então ser
interpolados com base no seguinte cálculo:
Em que as funções de forma são definidas do seguinte modo:
E em que representa a matriz identidade
As deformações são obtidas por derivação dos deslocamentos. Assim, numa análise
tridimensional são relevantes seis componentes de deformação, definidas como:
Usando as equações (3)-(8) verifica-se que:
(7)
(9)
(10)
(11)
(8)

Capítulo 3 – Modelo de Elementos Finitos
Página | 24
Onde,
Sendo que as outras sub-matrizes, são obtidas de maneira semelhante.
Para um material isotrópico, com matriz de elasticidade, , a relação entre tensões
e deformações é dada por:
Onde,
Em que representam as tensões normais e as tensões de
corte.
A matriz das constantes elásticas, , para o estado tridimensional, é uma função de
, que representa o módulo de elasticidade e , o coeficiente de Poisson.
Na solução por elementos finitos, as equações de equilíbrio não são satisfeitas
exactamente em todos os pontos considerados, havendo duas propriedades que são
satisfeitas em qualquer malha de elementos finitos. A primeira propriedade refere-se
ao equilíbrio nos nós, enquanto que a segunda propriedade se refere ao equilíbrio no
elemento.(4,5)
(15)
(14)
(12)
(13)

Capítulo 3 – Modelo de Elementos Finitos
Página | 25
As forças nodais correspondentes à energia interna de deformação associada a um
elemento finito, , podem ser calculadas por:
Onde .
A equação de equilíbrio em cada nó, segundo cada grau de liberdade condiz ao
seguinte sistema de equações:
Na análise por elementos finitos, podem referir-se as seguintes condições:
1. A estrutura é idealizada como um conjunto interligado de elementos discretos
ligados em nós;
2. As forças externas aplicadas são atribuídas a esses nós, usando o princípio dos
trabalhos virtuais para obter forças nodais equivalentes às forças aplicadas;
3. As forças nodais equivalentes às forças externas aplicadas são equilibradas
pelas forças nodais equivalentes às tensões internas nos elementos, ou seja,
4. As equações de compatibilidade de tensão-deformação são exactamente
satisfeitas.
A matriz de rigidez pode ser integrada explicitamente, uma vez que, as
componentes de deformação e tensão são constantes dentro do elemento.
A sub-matriz geral da matriz de rigidez é uma matriz definida como:
Em que representa o volume dum tetraedro elementar.
As forças nodais devidas à deformação inicial resultam em:
(4)
(16)
(17)
(19)
(20)
(18)

Capítulo 3 – Modelo de Elementos Finitos
Página | 26
3.1.2.Modelos Constitutivos
Nesta parte é considerada a elasticidade dos corpos (materiais que voltam ao seu
estado inicial depois de retirada a tensão aplicada) ou a sua plasticidade (propriedade
dos materiais que se deformam, mudando a sua forma inicial de modo irreversível, em
resposta a uma tensão aplicada) – Figura 3.
Figura 3 – Componentes de tensão de corte relativamente às componentes de deformação de corte com aumento de deformação
Existem várias descrições matemáticas sobre o comportamento mecânico dos
materiais. Uma delas é a teoria da deformação elástica (Leis de Hooke), onde o tensor
de tensão é uma função do tensor deformação. A teoria matemática associada à teoria
da plasticidade, usa um conjunto de equações não lineares para descrever um
conjunto de alterações de deformações e tensões em relação ao estado anterior e a
pequenos aumentos de deformação.(5,22,23,24)
Considere-se um bloco cilíndrico de área transversal . É-lhe aplicada uma carga ,
com alongamento e comprimento (Figura 4).
P
Tensão
X (rotura)
Região plástica
Deformação
ão
Região elástica

Capítulo 3 – Modelo de Elementos Finitos
Página | 27
Figura 4 – Diagrama de carga-alongamento
Numa porção linear (gama proporcional) se a carga for anulada
(descarregamento), então a linha fica a zero e o modelo tem um comportamento
elástico.
Aplicando uma carga maior que , passa a existir , com um alongamento
permanente . Se se voltar a aplicar a carga em , isto indica um comportamento
elástico com o mesmo declive , mas com um limite aumentado proporcionalmente.
O material diz-se endurecido por deformação.
O diagrama de tensão-deformação depende da secção transversal e do
comprimento. Com o objectivo de ter uma representação do comportamento material,
que é independente do tamanho do exemplo e das variáveis introduzidas, utiliza-se o
valor de tensão axial:
Onde é a área não deformada da secção versus a deformação axial, . O
declive da linha define um coeficiente de material chamado módulo de Young (ou
módulo de elasticidade).
Dentro de certos limites, podem ser retiradas algumas conclusões:
1. A relação entre as cargas aplicadas e as deformações é linear;
2. A variação da carga aplicada não tem nenhum efeito;
3. Removidas as cargas aplicadas, as deformações desaparecem
completamente;
4. As deformações são muito pequenas.
P
B
(21)
(22)
O
P
A
C

Capítulo 3 – Modelo de Elementos Finitos
Página | 28
As características de 1 a 4 são usadas para formular equações constitutivas de um
material ideal, sólido linear elástico. A equação constitutiva relaciona a tensão com
quantidades relevantes de deformação. Neste caso, as deformações são pequenas.
Pode escrever-se:
Onde é o tensor das tensões de Cauchy e o tensor de deformação infinitesimal,
com . Se, ainda, a função for linear pode escrever-se em termos de
componentes:
..............................................................
Estas nove equações podem ainda ser reescritas como:
Uma vez que e são componentes de tensores de segunda ordem, então
são componentes do tensor de quarta ordem, conhecido como tensor de
elasticidade.
Os valores destas componentes, em relação à base de referência e à base
corrente , são relacionadas pela seguinte lei de transformação:
Se o corpo é homogéneo, as propriedades mecânicas são as mesmas para cada
partícula no corpo, então são constantes, isto é, independentes da posição.
Existem 81 coeficientes na equação (24). Contudo, uma vez que, é
possível combinar a soma de dois termos, tais como, num só
termo, , em que se torna num coeficiente
independente. Da mesma forma, se pode simplificar . Assim, devido à
simetria do tensor de deformação, pode ser escrita a seguinte condição:
A equação (27) reduz o número de independentes de 81 para 54.
Se considerarmos os casos em que o tensor de tensão é simétrico, isto é,
(23)
(24)
(25)
(26)
(27)
(28)

Capítulo 3 – Modelo de Elementos Finitos
Página | 29
Obtém-se,
Esta equação reduz o número de coeficientes independentes para 18. Assim, para o
caso geral de um corpo elástico linear, passam a existir no máximo 36 coeficientes
materiais.
Um material diz-se isotrópico se as suas propriedades mecânicas podem ser
descritas sem referência à direcção. Caso contrário, diz-se anisotrópico.
Para um sólido linear elástico, em relação à base , tem-se:
E em relação à base :
Se o material for isotrópico, as componentes do tensor elasticidade podem ser
iguais, isto é:
Um tensor tendo as mesmas componentes em relação a qualquer base ortonormal
é conhecido como tensor isotrópico. Por exemplo, o tensor identidade, , é um tensor
isotrópico, uma vez que as suas componentes são iguais em qualquer base
cartesiana.
A partir de podem ser formados os seguintes tensores isotrópicos
independentes de quarta ordem:
Assim, para um material elástico linear isotrópico, o tensor elasticidade pode
ser escrito como uma combinação linear de :
(29)
(30)
(31)
(32)
(33)
(34)

Capítulo 3 – Modelo de Elementos Finitos
Página | 30
Onde são constantes. Substituindo a equação (34) na equação (30) e ainda
sabendo que:
Obtém-se,
Ou substituindo por , a equação (36) pode ser reescrita como:
Ou em notação tensorial:
Onde é o primeiro invariante de .
A equação (37) pode, ainda, ser escrita da seguinte forma:
As equações (39) são as equações constitutivas para um sólido linear isotrópico.
As duas constantes materiais e são conhecidas como coeficientes ou constantes
de Lamé. Uma vez que, é adimensional, e têm as mesmas dimensões do tensor
tensão (força por unidade de área).
A equação (37) expressa as componentes de tensão em termos das componentes
de deformação. Esta equação pode ser invertida para se ter:
Ou, ainda,
(35)
(36)
(37)
(38)
(39)
(40)
(41)

Capítulo 3 – Modelo de Elementos Finitos
Página | 31
Se o estado de tensão é tal que apenas uma das componentes normais de tensão é
diferente de zero chama-se estado de tensão uniaxial. Se a direcção de for axial com
e todos os outros , então a equação (40) pode ser escrita como:
A razão corresponde a (22) e é o módulo de Young ou módulo de
elasticidade, .
Assim, a equação (42) pode ser reescrita como:
A razão e correspondendo à razão e é o coeficiente de
Poisson. Deste modo, da equação (43) obtém-se:
Usando as equações (45) e (46), a equação (40) pode ser reescrita da seguinte
forma:
Eliminando das equações (45) e (46) tem-se a seguinte relação bastante
importante:
Usando esta relação, a equação 40 pode também ser escrita da seguinte forma:
(42)
(43)
(44)
(45)
(46)
(49)
(53)
(54)
(47)
(48)
(50)
(51)
(52)

Capítulo 3 – Modelo de Elementos Finitos
Página | 32
Se o estado de tensão é tal, que só um par de tensões de corte é diferente de zero,
é chamado estado de tensão de corte simples. Este estado de tensão pode ser descrito
por e a partir de (50) obtém-se:
Definindo o módulo de elasticidade transversal, , como a razão entre a tensão de
corte, , e a variação do ângulo entre elementos que estavam inicialmente nas
direcções e obtém-se:
Comparando (56) com (55) nota-se que a constante de Lamé, , é também o
módulo de elasticidade transversal, .
Para um material elástico existe uma relação linear para (dilatação) e define-se o
módulo de compressibilidade, , como a razão entre a tensão hidrostática, , por
unidade de variação de volume:
Tabela I – Conversão de constantes para um material elástico isotrópico
Das equações (45), (46), (53) e (57) conclui-se que as constantes de Lamé, o
módulo de Young, o módulo de elasticidade transversal, o coeficiente de Poisson e o
módulo de compressibilidade se interrelacionam. A tabela I expressa as várias
constantes elásticas em termos de dois pares de bases.
(55)
(56)
(57)

Capítulo 3 – Modelo de Elementos Finitos
Página | 33
Assume-se que o conceito de “elasticidade” está associado à existência de uma
função de energia deformação . Esta é uma função definida positiva das
componentes de deformação tal como:
Note-se que definida positiva significa que uma função é zero se e só se todas as
componentes de deformação são zero. Caso contrário, a função diz-se positiva.(5,22,23,24)
A hiperelasticidade prende-se com o estudo de várias equações constitutivas, que
relacionam componentes de tensão com componentes de deformação, dentro de um
regime não linear, as quais são apropriadas a técnicas de aproximação, tais como, o
Método dos Elementos Finitos.
O objectivo das teorias constitutivas é desenvolver modelos matemáticos para
representar o real comportamento dos materiais.
Os materiais hiperelásticos implicam a existência de uma função de energia livre de
Helmholtz, , que é definida como uma relação entre a unidade de volume de
referência e a unidade de massa.
No caso de ser apenas uma função de , ou algum tensor de
deformação, a função de Helmholtz é referida como uma função de energia
deformação, que é um exemplo típico de uma função escalar de um tensor variável, ,
assumida como contínua.
A distribuição dos constituintes internos é uniforme numa escala contínua. Para
este tipo de materiais, a função depende apenas do gradiente de deformação, .
Para materiais heterogéneos (materiais não homogéneos), depende também da
posição de um ponto no meio.
Um material hiperelástico é definido como uma subclasse de um material elástico,
cujas funções de resposta e têm expressões físicas da seguinte forma:
Usando a seguinte relação do tensor simétrico das tensões de Cauchy:
(58)
(59)
(60)

Capítulo 3 – Modelo de Elementos Finitos
Página | 34
E lembrando que , obtém-se;
Ou:
Este tipo de equações é conhecido como equações constitutivas ou equações de
estado. Estabelecem um modelo axiomático ou empírico como base de aproximação
do comportamento de um material real. O modelo diz-se constitutivo ou modelo
material.
A derivada da função escalar, , em relação ao tensor variável, , determina o
gradiente de , que é um tensor de segunda ordem, conhecido como o primeiro
tensor de Piola-Kirchhoff, .
A derivação implica que a função componente, , é diferenciável em relação
a todas as componentes .
Por conveniência, assume-se que a função de energia deformação tende para na
configuração de referência, isto é, onde , sendo expressa pela condição de
normalização:
A partir de uma observação física nota-se que a função de energia deformação, ,
aumenta com a deformação, de onde se deduz:
Que limita as gamas de funções admissíveis ocorrendo em expressões para a
energia deformada. Assume-se que não tem pontos estacionários no espaço
deformado.
As relações (63) e (64) asseguram que a tensão na configuração de referência,
chamada tensão residual, é zero. Diz-se, então, que a configuração de referência é livre
de tensão.
Para o comportamento de deformações finitas é necessário que a função escalar,
, satisfaça também as seguintes condições:
(62)
(63)
(64)
(65)
(61)

Capítulo 3 – Modelo de Elementos Finitos
Página | 35
Fisicamente, o mesmo significa que é necessário uma quantidade infinita de
energia deformada, de forma a expandir um corpo contínuo para um intervalo infinito,
ou reduzindo-o a um ponto com um volume a tender para zero.(5,25,26)
O Modelo Material de Mooney-Rivlin é um modelo bem conhecido, não apenas por
razões históricas e por ter sido um dos primeiros modelos hiperelásticos, mas também
pela sua exactidão na previsão do comportamento não linear de materiais isotrópicos
similares a borracha.(5,25,26)
A função deformação-energia para este modelo material pode ser escrita da
seguinte forma:
3.2.Modelação
A modelação de sistemas do corpo humano refere-se ao desenvolvimento de
modelos matemáticos, que possibilitam estimar o comportamento humano em
resposta a determinada solicitação e que permitem gerar visualizações gráficas em
tempo real. Por exemplo, a utilização de modelos a 3 dimensões (3D) da mão humana
tem sido de extrema importância para a criação de membros artificiais mais precisos,
com controlos mais exactos e para estudos de equipamentos mais ergonómicos.
Estudos biomecânicos recentes destacam a importância, não apenas, da capacidade de
apreensão dos objectos, mas também o modo como é realizado este movimento,
sendo este de grande importância para indivíduos que possuem membros artificiais.(27)
Actualmente, existem vários tipos de modelos para estudar os membros, a
diferença baseia-se na forma como abordam/investigam o objecto de estudo. Existem,
nomeadamente, modelos músculo-esqueléticos, modelos 2D e modelos 3D. Neste
trabalho apenas serão descritos os modelos 3D pois serão estes a base deste estudo.
A maioria dos estudos sobre controlo motor tem-se focado em movimentos a 2D e
poucos se têm concentrado na investigação dos movimentos a 3D. É de referir que os
(66)

Capítulo 3 – Modelo de Elementos Finitos
Página | 36
movimentos a 3D não podem ser apreendidos dos movimentos a 2D apenas
adicionando mais uma dimensão. A terceira dimensão acrescenta novas
complexidades.
Por exemplo, o processo de mover a mão em direcção a um alvo é um processo
bastante complexo. Este envolve uma série de transformações sensório-motoras que
assimilam informação visual e sensitiva sobre a localização do alvo e a transmitem
como um conjunto de ordens motoras para os membros, as quais levam a mão a
posicionar-se correctamente. Esta série de transformações não é, de todo, uma
simples sequência ordenada de informações dos vários estados deste processo.(27)
3.2.1.Estudos anteriores
Muitos estudos têm sido conduzidos no sentido de se obterem parâmetros
morfológicos para desenvolvimento de modelos biomecânicos de diferentes sistemas
humanos músculo-esqueléticos.(3)
Nomeadamente, têm sido propostos vários modelos para explicar a planificação e
execução dos movimentos. Estes modelos têm tentado explicar diferentes aspectos do
controlo motor e são baseados em diferentes assumpções.(27)
No entanto, pouquíssimos estudos se têm focado nos membros superiores, pois
existe falta de informação relativa a localizações a 3D, a orientações das ligações de
músculos e à orientação dos eixos de rotação das articulações do membro superior
(isto deve-se à dificuldade neste tipo de medição/cálculo).(3,28)
Além disso, o facto da medição directa não ser possível, a modelação biomecânica
apresenta-se com uma solução alternativa para medição indirecta de determinadas
forças.(6,19)
A mão humana tem sido um fascinante objecto de estudo para os investigadores,
tanto no que diz respeito ao controlo motor como à biomecânica. Estudos já realizados
sobre preensão têm contribuído significativamente para comprovar que o sistema de
produção de movimento não é redundante mas abundante. Ou seja, o design da mão
não é uma fonte de problemas computacionais mas um mecanismo bastante rico que

Capítulo 3 – Modelo de Elementos Finitos
Página | 37
permite a realização de uma ampla variedade de tarefas, isto de um modo flexível e
seguro. (27,29)
Actividades, tais como, juntar ou remover partes a objectos, recorrendo ao uso de
ferramentas manuais ou controlos, e rodar maçanetas de portas pode ser fisicamente
um desafio. A aplicação de forças repetidamente ou a simples derrapagem do objecto
de trabalho da mão são factores de fadiga localizada e de acumulação de lesões
traumáticas. É importante ter em conta a capacidade de força de torção da mão para o
design de equipamentos, ferramentas e produtos, de forma a assegurar que os seus
utilizadores podem completar a tarefa com sucesso e prevenir lesões e outros efeitos
adversos em termos de saúde.(30,31)
Para segurar e transportar um objecto, nós temos de estabilizá-lo dentro do nosso
aperto e prevenir que este escorregue. É necessária uma força de aperto suficiente
para completar com sucesso actividades quer a nível diário quer a nível profissional,
tais como, remover uma tampa ou utilizar ferramentas manuais.(32)
A performance manual baseia-se, preferencialmente, no controlo motor da mão e
dedos pelo sistema nervoso central, de forma bem organizada e efectiva. A
manipulação efectiva e bem sucedida requer a selecção dos comandos motores
adaptados à intenção da manipulação e às propriedades mecânicas do objecto em
questão. Por exemplo, nós temos de estabilizar o objecto dentro do nosso aperto e
prevenir que escorregue, ao mesmo tempo que, forças de aperto excessivas têm de
ser evitadas pois estas podem esmagar os objectos que sejam frágeis ou podem
dificultar movimentos finos dos dedos durante um aperto preciso.(32)
Nas duas últimas décadas, um amplo número de estudos têm caracterizado
importantes características da cinemática e cinética de aperto e manipulação de
objectos fornecendo, assim, conhecimento sobre como o sistema nervoso central
controla a mão, um dos sistemas motores mais complexos e que comporta uma
enorme variedade de comportamentos.(33)
Muitos estudos já efectuados, de forma a investigar as forças dos dedos nos
movimentos de manipulação simples e livres, foram realizados com recurso a
objectos/instrumentos desenvolvidos para tal.(33)
Em 1975, Pheasant e O’Neill construíram um modelo no qual demonstraram que a
fricção se encontra relacionada com a força normal e com o coeficiente de fricção

Capítulo 3 – Modelo de Elementos Finitos
Página | 38
entre a mão e o objecto. Estudos posteriores demonstraram que o próprio coeficiente
de fricção está relacionado com a força de contacto, o material e textura do objecto, e
com a presença de lubrificações. A força normal está relacionada com a força de
aperto do indivíduo.(30)
O modelo do momento de uma força de Pheasant e O’Neill foi modificado em 2007
por Seo, Armstrong, Ashton-Miller e Chaffin, de modo a ter em conta a distribuição das
forças de aperto. Este modelo assim modificado sugeria que a fricção da pele
produzida pela torção de um objecto na direcção dos dedos causava flexão nas
falanges distais, o que aumentava a força de aperto, e consequentemente, o momento
da força. Isto suportava o modelo de Pheasant e O’Neill, o qual calculava o momento
da força como um produto do diâmetro do objecto, coeficiente de fricção e força de
aperto.(30) Em 2008, estes propuseram uma nova modificação do modelo de Pheasant
e O’Neill, no qual então a força de torção era igual à soma dos produtos do raio do
objecto, coeficiente de fricção e força de contacto em cada contacto mão-objecto.
Neste concluíram que para uma determinada força muscular, uma maior força de
contacto e uma maior força de torção seriam produzidas em rotações interiores do
que em rotações exteriores. Este modelo também suportava o modelo de Pheasant e
O’Neill o qual dizia que o momento da força aumentava com o aumento da fricção.(31)
Outro modelo biomecânico da mão já proposto consistia num modelo inteiro da
mão com o intuito de simular a carga muscular no aperto estático e nos movimentos
livres. Mas, assim como este, muitos outros modelos matemáticos da mão foram
formulados analiticamente e assentam em assumpções simplistas.(34)
Tal como já foi referido acima, as propriedades do objecto como, peso, forma e
fricção da superfície, impõem restrições na magnitude da força de aperto. As forças
friccionais na interface pele-objecto geradas pelo aperto têm de contrariar as forças
externas que surgem da manipulação. Encontra-se já documentado que as forças de
aperto são precisamente ajustadas ao peso do objecto e à fricção da superfície. A força
de aperto exercida contra um objecto imobilizado excede o mínimo requerido para
prevenir que este escorregue apenas por um pequena margem de segurança. Quando
um objecto é transportado na mão, a força de aperto não é mantida a um nível
constante. A ausência de atraso no tempo entre a força de aperto e a força de carga

Capítulo 3 – Modelo de Elementos Finitos
Página | 39
sugerem que o nosso sistema motor é capaz de prever precisamente as flutuações do
movimento geradas pela carga e regula a força de aperto com antecipação.(32)
O comportamento normal da força de aperto compreende:
1. Força eficiente dimensionada aos requisitos intrínsecos da carga de intenção
de manipulação e às propriedades mecânicas extrínsecas, tais como, o peso,
a forma e a fricção de superfície do objecto a ser manipulado;
2. E um acoplamento temporal próximo entre uma força de aperto e uma força
de carga, sendo a força de aperto modulada em paralelo com a de carga.(32)
Dados da força gerada pela mão são necessários para a análise e design de
equipamento que é apreendido ou manipulado pelas mãos. Muitos objectos, tais
como, as ferramentas manuais requerem padrões complexos de forças de aperto.
Durante o exercício de aperto máximo, a força está concentrada nos dedos II a V e na
palma da mão.(32,33)
A versatilidade do sistema motor da mão só é possível derivada à sua estrutura
mecânica bastante complexa. Por exemplo, muitos músculos inserem-se num único
dedo, e a actividade de um determinado músculo pode gerar torções em múltiplas
articulações do dedo.(33)
3.3.Modelo de Elementos Finitos
Os métodos utilizados hoje em dia abordam as características dos movimentos de
um modo relativamente simples, a 2D, podendo estes ser explicados e razoavelmente
bem compreendidos. No entanto, não existe ainda nenhum modelo robusto que possa
explicar aprofundadamente as características das complexas trajectórias dos
movimentos a 3D.(27)
Tal como a dinâmica do nosso corpo se altera durante o desenvolvimento e
à medida que experienciamos objectos que têm a sua própria dinâmica intrínseca, nós
precisamos de adquirir novos modelos e actualizar os modelos já existentes. De forma
homóloga, também se verifica a necessidade de invenção de novos modelos que expliquem
o que nos rodeia.(32)

Capítulo 3 – Modelo de Elementos Finitos
Página | 40
O modelo utilizado é composto por 16 ossos, os quais dizem respeito a 4
metacarpos e 12 falanges. As articulações existentes no modelo foram feitas entre as
falanges: a articulação metacarpofalangeal, a articulação interfalangeal proximal e a
articulação interfalangeal distal. As articulações são compostas basicamente por uma
cápsula articular e cartilagens fixas nas extremidades dos ossos referentes às
articulações. No modelo, foi utilizada apenas uma estrutura para representar estes
tecidos moles que envolvem os ossos e as cápsulas (excluindo tendões e ligamentos).
Os ossos e cartilagens foram considerados corpos rígidos. Para as cápsulas e pele foi
utilizado um modelo material hiperelástico. O polegar ainda que modelado, foi
considerado como elemento rígido.
Estrutura
Densidade
de Massa
(Kg/m3)
Módulo
de Young
(N/m2)
Coeficiente
de Poisson C10 C01 D1
Pele – –
Cápsulas
articulares – – –
Ossos – – – –
Cartilagens – – – –
Tabela II – Propriedades mecânicas do material
No modelo foi considerado deslizamento sem atrito. Foram criados pares de
contacto entre os ossos e as cápsulas para garantir que a cápsula fique envolvida na
articulação durante a simulação. As uniões entre os sólidos foram utilizadas para
garantir que os corpos ficassem unidos durante a simulação. No modelo foram
utilizadas uniões entre as cápsulas e os ossos, bem como, entre os ossos e as
cartilagens. Para efeito de cálculo utilizou-se o software Abaqus. A utilização de
elementos finitos para simulações implica uma discretização do modelo. A
discretização foi feita pela criação de uma malha de elementos finitos.(20)

Capítulo 3 – Modelo de Elementos Finitos
Página | 41
Figura 5 – Malha de elementos finitos utilizada
O objectivo da simulação foi simular através do movimento de flexão a preensão
de um objecto de diâmetro 6 cm pelos dedos II a V.
Figura 6 – Malha de elementos finitos para as cápsulas articulares do dedo IV e V, vista
posterior

Capítulo 3 – Modelo de Elementos Finitos
Página | 42
Pretendeu-se aplicar rotação na mão, para tal procedeu-se à implementação no
modelo das condições fronteira (BCs). Foram aplicadas 4 BCs, a primeira localizada no
extremo proximal do metacarpo (BC-1), servindo como eixo base, e as outras três
foram aplicadas nas zonas de movimentação do dedo, uma na articulação entre o
metacarpo e a falange proximal (BC-2), outra na articulação entre a falange proximal e
a falange medial (BC-3), e a última na articulação entre a falange medial e a falange
distal (BC-4). Para as condições fronteira, BC-2 a BC-4, foi calculado um valor de
rotação, que lhe permitisse flectir o suficiente, para simular apreender um objecto de
diâmetro 6 cm. Para tal, para cada conjunto de valores possíveis foi efectuada uma
simulação no Cluster do IDMEC. Após várias tentativas, verificou-se que os valores
mais razoáveis e que provocavam a menor distorção dos corpos, eram os seguintes:
1. BC-2: 15° (a flexão desta articulação é mínima durante este movimento);
2. BC-3: 100° (apenas se introduziu o valor de 85°, pois a este valor é somado o
valor anterior de 15°, de forma a resultar no total de 100°, pois visto todas as
BC estarem localizadas no mesmo eixo principal são influenciadas pelas
rotações precedentes);
3. BC-4: 100° (o valor introduzido foi 0, uma vez que, além da flexão desta
articulação ser mínima durante este movimento, esta articulação já está
sujeita às rotações precedentes).
Para transmitir uma ideia geral da posição de flexão da mão e respectivas articulações,
de seguida, encontra-se uma imagem real deste movimento, com destaque para o
dedo II (Figura 7).
Figura 7 – Movimento de flexão da mão para preensão de um objecto (31)

Capítulo 3 – Modelo de Elementos Finitos
Página | 43
De seguida, encontram-se os valores correspondentes às três BCs acima
referenciadas:
1. BC-2: 0,262 radianos;
2. BC-3: 1,483 radianos;
3. BC-4: 0.
De forma a simplificar a compreensão deste trabalho doravante a cápsula
articular 1 é referente à aplicação da BC-2, a cápsula articular 2 à BC-3 e a cápsula
articular 3 à BC-4.
Figura 8 – Local de aplicação da BC-2, BC-3 e BC-4, no dedo II
BC-2
BC-3
BC-4

Página | 44
Capítulo 4
Resultados e Discussão
Em termos de resultados mecânicos a análise recaiu sobre o estado de tensão e de
deformação, pelo que, de seguida, apresentam-se gráficos alusivos a estas grandezas.
Em cada uma das cápsulas articulares, foram escolhidos 4 pontos diametralmente
opostos (vista posterior, lateral, anterior e medial) e a partir destes foram retirados
valores das duas grandezas atrás referidas. No caso da tensão foram escolhidos pontos
localizados na região central da cápsula articular, enquanto que no que diz respeito à
deformação foram escolhidos pontos localizados na região distal da cápsula articular,
visto serem as zonas de maior variação de valores.
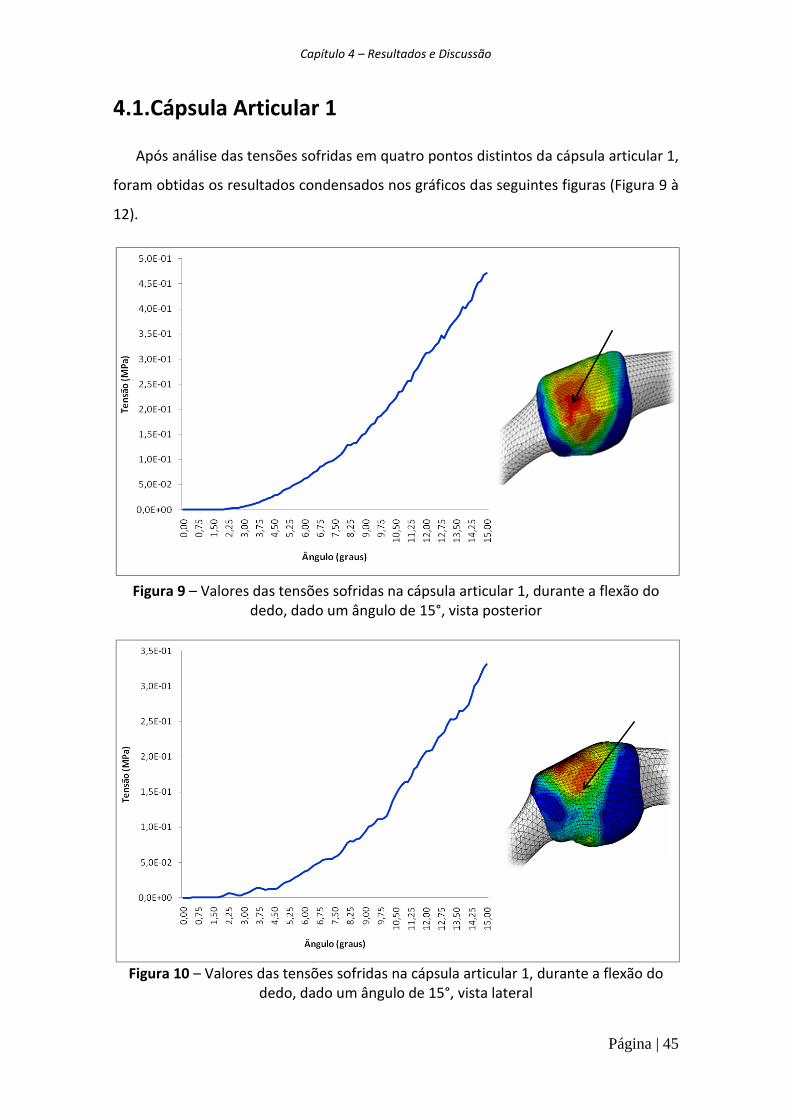
Capítulo 4 – Resultados e Discussão
Página | 45
4.1.Cápsula Articular 1
Após análise das tensões sofridas em quatro pontos distintos da cápsula articular 1,
foram obtidas os resultados condensados nos gráficos das seguintes figuras (Figura 9 à
12).
Figura 9 – Valores das tensões sofridas na cápsula articular 1, durante a flexão do
dedo, dado um ângulo de 15°, vista posterior
Figura 10 – Valores das tensões sofridas na cápsula articular 1, durante a flexão do
dedo, dado um ângulo de 15°, vista lateral

Capítulo 4 – Resultados e Discussão
Página | 46
Figura 11 – Valores das tensões sofridas na cápsula articular 1, durante a flexão do
dedo, dado um ângulo de 15°, vista anterior
Figura 12 – Valores das tensões sofridas na cápsula articular 1, durante a flexão do
dedo, dado um ângulo de 15°, vista medial
Após comparação das quatro figuras anteriores verifica-se, de grosso modo, um
aumento no valor das tensões ao longo tempo, ou seja, com o aumento do ângulo de
flexão a tensão aumenta. Os valores oscilam entre 0 e 5 MPa, registando-se o valor
mais elevado na vista posterior (Figura 9).

Capítulo 4 – Resultados e Discussão
Página | 47
De seguida, foram analisadas as deformações sofridas em quatro pontos distintos
da cápsula articular 1 (Figura 13 à 16).
Figura 13 – Valores das deformações sofridas na cápsula articular 1, durante a flexão
do dedo, dado um ângulo de 15°, vista posterior
Figura 14 – Valores das deformações sofridas na cápsula articular 1, durante a flexão
do dedo, dado um ângulo de 15°, vista lateral

Capítulo 4 – Resultados e Discussão
Página | 48
Figura 15 – Valores das deformações sofridas na cápsula articular 1, durante a flexão
do dedo, dado um ângulo de 15°, vista anterior
Figura 16 – Valores das deformações sofridas na cápsula articular 1, durante a flexão
do dedo, dado um ângulo de 15°, vista medial
Como seria de esperar, com a progressiva flexão do dedo os valores de deformação
também se alteram, tendendo a localizar-se na região positiva do gráfico no final da
flexão. Mas neste caso, já existem alguns aspectos a ter em conta, enquanto que na
Figura 13 (vista posterior) os valores da deformação são sempre positivos, nas
restantes figuras (Figura 14, 15 e 16) já são visíveis valores negativos. Os valores

Capítulo 4 – Resultados e Discussão
Página | 49
positivos referem-se à distensão do elemento, enquanto que os negativos
correspondem à compressão do elemento. Visto a Figura 13 dizer respeito a um
elemento localizado na vista posterior da cápsula articular, aquando da flexão do dedo
a malha vai ser distendida naquela área, logo apenas são registados valores acima de
zero. Por outro lado, nas restantes três figuras a malha já está sujeita a distensão e
compressão, dependendo da zona em questão. Na Figura 15 (vista anterior) são
visíveis, maioritariamente, valores abaixo de zero, pois a flexão do dedo é feita nessa
direcção, logo essa zona é a que está sujeita a uma maior compressão. O valor positivo
mais elevado (perto de 6) registou-se na vista anterior e vista medial.
4.2.Cápsula Articular 2
Após análise das tensões sofridas em quatro pontos distintos da cápsula articular 2,
foram obtidas as seguintes figuras (Figura 17 à 20).
Figura 17 – Valores das tensões sofridas na cápsula articular 2, durante a flexão do
dedo, dado um ângulo de 100°, vista posterior
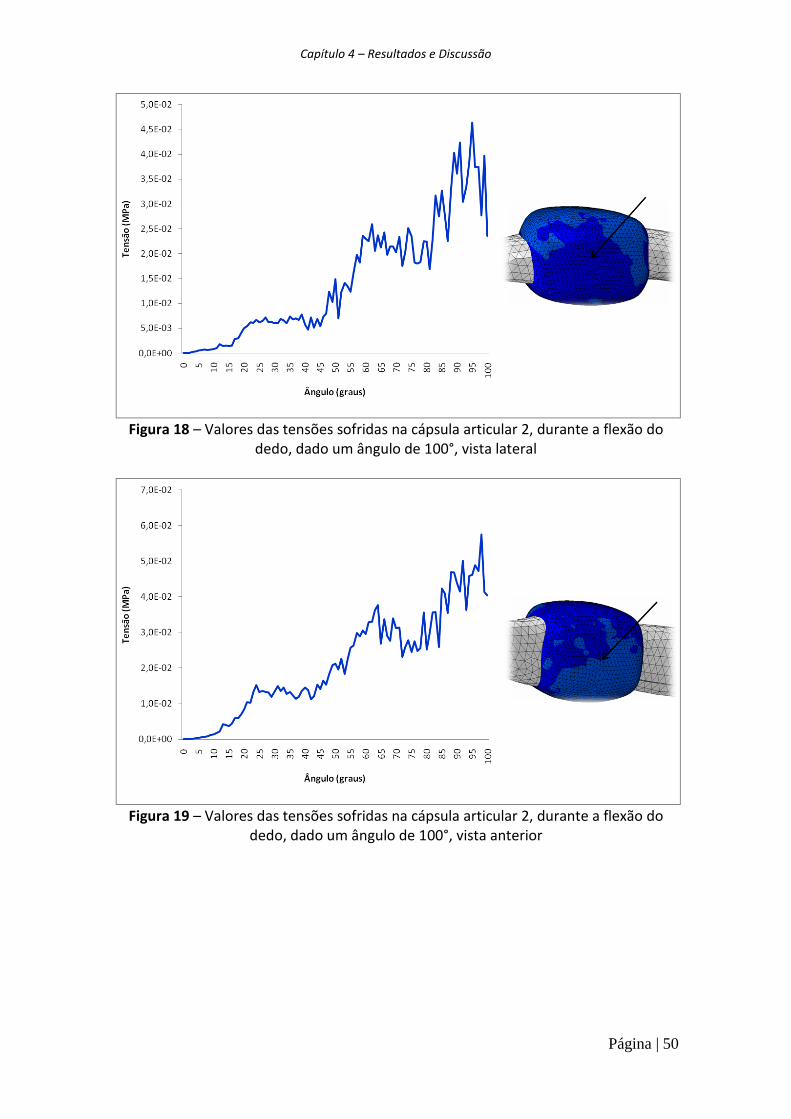
Capítulo 4 – Resultados e Discussão
Página | 50
Figura 18 – Valores das tensões sofridas na cápsula articular 2, durante a flexão do
dedo, dado um ângulo de 100°, vista lateral
Figura 19 – Valores das tensões sofridas na cápsula articular 2, durante a flexão do
dedo, dado um ângulo de 100°, vista anterior

Capítulo 4 – Resultados e Discussão
Página | 51
Figura 20 – Valores das tensões sofridas na cápsula articular 2, durante a flexão do
dedo, dado um ângulo de 100°, vista medial
Após observação das Figuras 17 a 20, verifica-se que a tensão aumenta com o
ângulo. Os valores oscilam entre 0 e perto de 9 MPa (valor máximo este
encontrado na vista medial). Estes valores situam-se abaixo dos encontrados na
cápsula articular 1, talvez, dado o facto de após comparação visual da flexão do dedo,
a cápsula que sofreu maior alteração aquando do movimento foi a cápsula articular 1.

Capítulo 4 – Resultados e Discussão
Página | 52
Após a análise das tensões, foram analisadas as deformações sofridas em quatro
pontos distintos da cápsula articular 2 (Figura 21 à 24).
Figura 21 – Valores das deformações sofridas na cápsula articular 2, durante a flexão
do dedo, dado um ângulo de 100°, vista posterior
Figura 22 – Valores das deformações sofridas na cápsula articular 2, durante a flexão
do dedo, dado um ângulo de 100°, vista lateral

Capítulo 4 – Resultados e Discussão
Página | 53
Figura 23 – Valores das deformações sofridas na cápsula articular 2, durante a flexão
do dedo, dado um ângulo de 100°, vista anterior
Figura 24 – Valores das deformações sofridas na cápsula articular 2, durante a flexão
do dedo, dado um ângulo de 100°, vista medial
Após observação das Figuras 21 a 24, verificou-se que apenas na vista posterior
existe uma grande quantidade de valores localizados abaixo de zero, chegando estes a
atingir perto de -6. Ou seja, com o passar do tempo, na fase final do movimento o
elemento foi sujeito a uma grande compressão. Ao contrário do que se verificou na
cápsula articular 1, onde na vista posterior apenas se verificaram valores acima de

Capítulo 4 – Resultados e Discussão
Página | 54
zero. Nas restantes vistas, apenas existem valores negativos na parte inicial da flexão e
aos 80° na vista lateral, ou seja, a tendência é para distenderem.
O valor positivo máximo foi encontrado na vista medial, chegando este perto de 9.
4.3.Cápsula Articular 3
Tendo em conta as tensões sofridas em quatro pontos distintos da cápsula articular
3, foram obtidas as seguintes figuras (Figura 25 à 28).
Figura 25 – Valores das tensões sofridas na cápsula articular 3, durante a flexão do
dedo, dado um ângulo de 100°, vista posterior

Capítulo 4 – Resultados e Discussão
Página | 55
Figura 26 – Valores das tensões sofridas na cápsula articular 3, durante a flexão do
dedo, dado um ângulo de 100°, vista lateral
Figura 27 – Valores das tensões sofridas na cápsula articular 3, durante a flexão do
dedo, dado um ângulo de 100°, vista anterior

Capítulo 4 – Resultados e Discussão
Página | 56
Figura 28 – Valores das tensões sofridas na cápsula articular 3, durante a flexão do
dedo, dado um ângulo de 100°, vista medial
Nas Figuras 25 a 28, é visível uma progressão positiva no valor das tensões.
Localizando-se o maior valor na vista anterior, valor este perto de 3,5 MPa. Estes
valores são bastante mais baixos dos que verificados nas cápsulas articulares 1 e 2.

Capítulo 4 – Resultados e Discussão
Página | 57
Também na cápsula articular 3 foram analisadas as deformações sofridas em
quatro pontos distintos, como tal, de seguida encontram-se as figuras alusivas a essa
análise (Figura 29 à 32).
Figura 29 – Valores das deformações sofridas na cápsula articular 3, durante a flexão
do dedo, dado um ângulo de 100°, vista posterior
Figura 30 – Valores das deformações sofridas na cápsula articular 3, durante a flexão
do dedo, dado um ângulo de 100°, vista lateral

Capítulo 4 – Resultados e Discussão
Página | 58
Figura 31 – Valores das deformações sofridas na cápsula articular 3, durante a flexão
do dedo, dado um ângulo de 100°, vista anterior
Figura 32 – Valores das deformações sofridas na cápsula articular 3, durante a flexão
do dedo, dado um ângulo de 100°, vista medial
Após análise das Figuras 29 a 32, constatou-se que, à excepção, da vista anterior,
nas restantes figuras se verifica uma tendência positiva, ou seja, uma tendência para a
malha distender. Embora, no final da flexão, o elemento localizado na vista anterior
acabe por se distender, nas fases anteriores apresenta um comportamento errático,
ora distendendo ora comprimindo, isto, provavelmente, devido ao facto, de estar

Capítulo 4 – Resultados e Discussão
Página | 59
localizado na direcção do movimento, logo sujeito a maiores oscilações. O valor
positivo mais elevado, muito perto de 8, localizou-se quer na vista posterior quer na
vista medial.
Após comparação dos valores obtidos nas três cápsulas articulares, no que
concerne à avaliação do estado de tensão após flexão da mão, o maior valor obtido
para esta grandeza foi de 5 MPa, valor este encontrado na cápsula articular 1. O
valor máximo das três cápsulas articulares foi registado em diferentes vistas, enquanto
que na cápsula articular 1 foi na vista posterior, nas cápsulas articulares 2 e 3, foi na
vista medial e na vista anterior, respectivamente. Já no que diz respeito ao estado de
deformação, o valor positivo mais elevado registou-se na cápsula articular 2, valor este
perto de 9. De modo geral, no final do movimento os diferentes elementos das três
cápsulas articulares tenderam para a distensão, ou seja, terminaram na região positiva
do gráfico, à excepção, do elemento localizado na vista posterior da cápsula articular 2,
que terminou o movimento em região negativa, com valores perto de – 6, o que,
provavelmente, será por ter sido foi sujeito a uma enorme compressão nesta fase.

Página | 60
Capítulo 5
Conclusões e Trabalhos Futuros
A presente investigação teve como objectivo o estudo biomecânico da mão,
através da simulação do seu movimento. Para tal, procedeu-se ao estudo do
movimento de flexão da mão com o objectivo de preensão de um objecto.
O modelo utilizado já tinha sido construído previamente em outro estudo,
tratando-se de uma versão da mão, composta por 16 ossos, nomeadamente, 4
metacarpos e 12 falanges. As articulações existentes no modelo foram feitas entre as
falanges: a articulação metacarpofalangeal, a articulação interfalangeal proximal e a
articulação interfalangeal distal. As articulações eram compostas por uma cápsula
articular e cartilagens fixas nas extremidades dos ossos referentes às articulações.
Com base no modelo acima descrito foram feitos alguns ensaios dinâmicos, tendo
sido comparados os resultados respeitantes às grandezas obtidas.
A primeira parte deste estudo consistiu na determinação do ângulo ideal de flexão
da mão em cada uma das três articulações existentes, nomeadamente, na articulação
metacarpofalangeal (MF), na articulação interfalangeal proximal (IF proximal) e na
articulação interfalangeal distal (IF distal). Após várias experimentações obtiveram-se
os valores de 15° para a articulação MF, e de 100° para a articulação IF proximal e
distal.
Na segunda parte deste estudo, procedeu-se à obtenção de duas grandezas,
designadamente, tensão e deformação, para cada uma das três cápsulas articulares
existentes, à medida que ocorria a flexão da mão.
Relativamente, às tensões exercidas concluiu-se que as maiores tensões ocorriam
na cápsula articular 1. Dentro dos valores obtidos para esta, tendo em conta quatro
pontos diametralmente opostos, o valor de tensão mais elevado foi registado no
elemento situado na vista posterior.
No que diz respeito às deformações, o valor positivo mais elevado
(correspondendo este à maior distensão observada) ocorreu na cápsula articular 2, na
vista medial. Embora tenham sido registados valores máximos próximos do referido

Capítulo 5 – Conclusões e Trabalhos Futuros
Página | 61
acima na vista anterior também da cápsula articular 2 e nas vistas posterior e medial
da cápsula articular 3. Por oposição, o valor mais elevado, no que concerne à
compressão ou deformação negativa, foi encontrado na vista posterior da cápsula
articular 2.
A presente tese permitiu assim o estudo de alguns aspectos relevantes, no que diz
respeito, à movimentação da mão, designadamente, o estudo do movimento de
flexão. Com recurso a este modelo poderão, ainda, ser possíveis outros estudos
similares, tais como, a avaliação de outro tipo de movimentos da mão, entre eles, a
extensão e a aducção.
A melhoria do modelo através de uma modificação neste de forma aos sólidos se
tocarem (permitindo assim a obtenção de valores para pressão de contacto), incluindo
ainda neste, os músculos e tendões (pois estes são responsáveis pelo gerar da força
muscular, assim como, pela sua transmissão), pode permitir ter uma visão mais global
do funcionamento da mão, possibilitando assim um estudo mais aprofundado desta,
assim como o estudo de um grupo mais vasto de patologias, como por exemplo,
doenças musculares.
Atendendo à escassez de resultados experimentais, é essencial a realização de
novas experiências, especialmente, in vivo, o que permitiria validar e melhorar o
modelo numérico.
Seria interessante continuar com um trabalho, já iniciado, que se prende com o
facto de se estudarem os movimentos da mão, por exemplo, a preensão de um
objecto e todos os processos associados a tal.
Uma futura aplicação deste trabalho poderá ser a ajuda na reabilitação de doentes
impossibilitados do uso de todas as capacidades manuais.
Um melhor conhecimento da simulação do comportamento biomecânico da mão é
fundamental, para uma melhor intervenção futura.

Página | 62
Referências
1. Tang, JB. General Concepts of Wrist Biomechanics and a View from Other
Species. Journal of Hand Surgery (European Volume) 33, 2008, pp.519-525,
SAGE Publications.
2. Valero-Cuevas, FJ. An integrative approach to the biomechanical function and
neuromuscular control of the fingers. Journal of Biomechanics 38, 2005, pp.673-
684, Elsevier Science Ltd.
3. Veeger, HEJ., Yu, B., Ant, KN., Rozendal, RH. Parameters for modeling the upper
extremity. Journal of Biomechanics 6, Vol. 30, 1997, pp.647, Elsevier Science
Ltd.
4. Zienkiewicz, OC., Taylor, RL. The finite method. Vol. II, McGraw – Hill, 2000.
5. Holzapfel, GA. Nonlinear Solid Mechanics – A Continuum Approach for
Engineering. John Wiley & Sons Ltd, Austria, 2000.
6. Vigouroux, L., Quaine, F., Labarre-Vila, A., Amarantini, D., Moutet, F. Using EMG
data to constrain optimization procedure improves finger tendon tension
estimations during static fingertip force production. Journal of Biomechanics 40,
2007, pp.2846–2856, Elsevier Science Ltd.
7. Freivalds, A. Biomechanics of the Upper Limbs, Mechanics, Modeling, and
Musculoskeletal Injuries. CRC Press, 2004.
8. Graaff, V. Human Anatomy, Mc Graw – Hill, 2002.
9. Kent, M. Human Anatomy. McGraw-Hill, 2001.
10. Scanlon, V., Sanders, T. Essentials of Anatomy and Physiology. F. A. Davis
Company, 2007.
11. Seeley, R., Stephens, T., and Tate, P. Anatomy and Physiology. McGraw-Hill,
2004.
12. Hof, AL. Muscle mechanics and neuromuscular control. Journal of Biomechanics
36, 2003, pp.1031–1038, Elsevier Science Ltd.
13. Sobotta, J., Putz, R., Pabst, R., Bedoui, S. Sobotta Atlas of Human Anatomy.
Lippincott Williams & Wilkins, 2001.

Referências
Página | 63
14. Netter, F. Atlas of Human Anatomy. Saunders, 2006.
15. http://images.google.pt/imgres?imgurl=http://www.vivatranquilo.com.br/saud
e/anatomia/images/ossos_mao_vista_dorsal.jpg&imgrefurl=http://www.vivatr
anquilo.com.br/saude/anatomia/ossos_mao_dorsal.htm&usg=__gt1x7XLeDWU
bzG6ygRx99fBhsqs=&h=826&w=800&sz=46&hl=pt-
PT&start=5&tbnid=lzlzWH5_9GxvcM:&tbnh=144&tbnw=139&prev=/images%3
Fq%3Dossos%2Bm%25C3%25A3o%26gbv%3D2%26hl%3Dpt-PT%26sa%3DG
(acesso em 07/07/2009).
16. Valero-Cuevas, FJ. A Mathematical Approach to the Mechanical Capabilities of
Limbs and Fingers. Advances in experimental medicine and biology, Progress in
Motor Control, Vol. 629, 2009, pp. 619-633, Springer Science+Business Media,
New York, US.
17. Valero-Cuevas, FJ. An integrative approach to the biomechanical function and
neuromuscular control of the fingers. Vol. 38, pp. 673-684, 2004, Elsevier
Science Ltd.
18. Ingram, JN., Körding, KP., Howard, IS., Wolpert, DM. The statistics of natural
hand movements. Experimental Brain Research, nº2, Vol. 188, 2008, pp. 223-
236, Springer Berlin/Heidelberg.
19. Vigourouxa, L., Quaineb, F., Labarre-Vilac, A., Amarantinid, D., Moutete, F.
Using EMG data to constrain optimization procedure improves finger tendon
tension estimations during static fingertip force production. Journal of
Biomechanics 40, 2007, pp. 2846–2856, Elsevier Science Ltd.
20. Rocha, DN., Jorge, RMN., Pinotti, M. Desenvolvimento de um modelo 3D da
mão humana para estudos biomecânicos. 3º Congresso Nacional de
Biomecânica 2009 (M.A. Vaz, P.A.G. Piloto, J.C. Reis Campos (Eds), CD-Rom e
Livro de Actas), 11-12 de Fevereiro 2009, Instituto Politécnico de Bragança,
pp.183-187.
21. Blana, D., Hincapie, JG., Chadwick, EK., Kirsch, RF. A musculoskeletal model of
the upper extremity for use in the development of neuroprosthetic systems.
Journal of Biomechanics 41, 2008, pp.1714–1721, Elsevier Science Ltd.
22. Oden, J. Finite Elements of Nonlinear Continua. McGraw-Hill, New York, 1972.
23. Wriggers, P. Computational Contact Mechanics. Springer, 2006.

Referências
Página | 64
24. Bonet, J., Wood, R. Nonlinear Continuum Mechanics for Finite Element Analysis.
Cambridge University Press, 1997.
25. Ogden, R. Non-Linear Elastic Deformations. Ellis Horwood and John Wiley,
Chichester, 1984.
26. Lai, W., Rubin, D., Krempl, E. Introduction to Continuum Mechanics. Pergamon
Pr, 1993.
27. Latash, ML., Zatsiorsky, VM. Multi finger prehension: Control of a Redundant
Mechanical System. Advances in experimental medicine and biology, Progress
in Motor Control, Vol. 629, 2009, pp. 597-618, Springer Science+Business
Media, New York, US.
28. Veeger, HEJ., Yu, B., An, KN., Rozendal, RH. Parameters for modeling the upper
extremity. Vol. 30, pp. 647-652, 1997, Elsevier Science Ltd.
29. Yang, N., Zhang, M., Huang, C., Jin, D. Synergic analysis of upper limb target-
reaching movements. Journal of Biomechanics 35, 2002, pp. 739–746, Elsevier
Science Ltd.
30. Seo, NJ., Armstrong, TJ., Ashton-Miller, JA. Chaffin, DB. The effect of torque
direction and cylindrical handle diameter on the coupling between the hand and
a cylindrical handle. Journal of Biomechanics 40, 2007, pp.3236–3243, Elsevier
Science Ltd.
31. Seo, NJ., Armstrong, TJ., Chaffin, DB., Ashton-Miller, JA. Inward Torque and
High-Friction Handles Can Reduce Required Muscle Efforts for Torque
Generation. Human Factors, nº 1, Vol. 50, February 2008, pp.37-48, Human
Factors and Ergonomics Society.
32. Nowak, DA., Hermsdörfer, J. Grip Force Behavior During Object Manipulation in
Neurological Disorders: Toward an Objective Evaluation of Manual Performance
Deficits. Movement Disorders, nº1, Vol. 20, 2005, pp. 11–25, Movement
Disorder Society.
33. Johnston, JA., Winges, SA., Santello, M. Neural Control of Hand Muscles During
Prehension. Advances in experimental medicine and biology, Progress in Motor
Control, Vol. 629, 2009, pp.577-596, Springer Science+Business Media, New
York, US.

Referências
Página | 65
34. Wu, JZ., An, KN., Cutlip, RG., Krajnak, K., Welcome, D., Dong, RG. Analysis of
musculoskeletal loading in an index finger during tapping. Journal of
Biomechanics 41, 2008, pp.668–676, Elsevier Science Ltd.