ex ecution e cace de syst emes multi-agents sur gpu · tion de tels modèles sur une plate-forme...
TRANSCRIPT
Execution efficace de systemes Multi-Agents sur GPU
Guillaume Laville
To cite this version:
Guillaume Laville. Execution efficace de systemes Multi-Agents sur GPU. Systeme multi-agents [cs.MA]. Universite de Franche-Comte, 2014. Francais. <NNT : 2014BESA2016>.<tel-01126982>
HAL Id: tel-01126982
https://tel.archives-ouvertes.fr/tel-01126982
Submitted on 6 Mar 2015
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinee au depot et a la diffusion de documentsscientifiques de niveau recherche, publies ou non,emanant des etablissements d’enseignement et derecherche francais ou etrangers, des laboratoirespublics ou prives.
Thèse de Doctorat
é c o l e d o c t o r a l e s c i e n c e s p o u r l ’ i n g é n i e u r e t m i c r o t e c h n i q u e s
U N I V E R S I T É D E F R A N C H E - C O M T É
n
Exécution efficace de systèmesmulti-agents sur GPU
Guillaume Laville
Thèse de Doctorat
é c o l e d o c t o r a l e s c i e n c e s p o u r l ’ i n g é n i e u r e t m i c r o t e c h n i q u e s
U N I V E R S I T É D E F R A N C H E - C O M T É
THÈSE présentée par
Guillaume Lavillepour obtenir le
Grade de Docteur del’Université de Franche-Comté
Spécialité : Informatique
Exécution efficace de systèmes multi-agents sur GPU
Soutenue le 27 juin 2014 devant le Jury :
Christophe Cambier Rapporteur Chargé de recherche (HDR) à l’Université Pierre etMarie Curie, Paris
Michaël Krajecki Rapporteur Professeur à l’Université de Reims Champagne-Ardenne
Stéphane Genaud Examinateur Professeur à l’Université de StrasbourgFabrice Bouquet Examinateur Professeur à l’Université de Franche-ComtéLaurent Philippe Directeur de thèse Professeur à l’Université de Franche-ComtéKamel Mazouzi Encadrant Ingénieur de Recherche au Mésocentre de calculs de
Franche-ComtéChristophe Lang Encadrant Maître de Conférences à l’Université de Franche-Comté
N° X X X

Sommaire
Table des matières 6
Remerciements 7
Introduction 9
I Contexte 13
1 Les systèmes multi-agents 17
1.1 Science et simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.2 Les systèmes multi-agents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 Modèles d’exécution et de programmation parallèles 27
2.1 Une réponse à des besoins en calcul . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2 Parallélisation en mémoire partagée . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3 Parallélisation en mémoire distribuée . . . . . . . . . . . . . . . . . . . . . . . . 31
2.4 Parallélisation hybride . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.5 Une nouvelle architecture d’exécution : le GPU . . . . . . . . . . . . . . . . . . 34
2.6 Vers une convergence many-core . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.7 Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3 Parallélisation de systèmes multi-agents 47
3.1 Stratégies de parallélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2 Plates-formes multi-agents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.3 État de la simulation multi-agents sur GPU . . . . . . . . . . . . . . . . . . . . 54
3.4 Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
II Contribution 61
4 Problématique 65
4.1 Portabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
SOMMAIRE 6
4.2 Réutilisation d’algorithmes et de structures . . . . . . . . . . . . . . . . . . . . 66
4.3 Intégration avec l’existant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.4 Extensibilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.5 Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5 Adaptation d’un modèle multi-agents sur GPU : Proie-Prédateur 69
5.1 Présentation du modèle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.2 Stratégies de déplacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.3 Adaptation OpenCL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.4 Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6 Méthodes d’adaptation SMA sur GPU 79
6.1 Gestion de la dimension spatiale . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6.2 Développement d’un modèle sur GPU . . . . . . . . . . . . . . . . . . . . . . . 80
6.3 Parallélisation de certains traitements . . . . . . . . . . . . . . . . . . . . . . . 85
6.4 Utilisation de traitements parallélisés existants . . . . . . . . . . . . . . . . . . . 88
6.5 Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
7 MCMAS, une bibliothèque d’exécution générique 93
7.1 Présentation générale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
7.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
7.3 Implémentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7.4 Utilisation de l’interface de haut niveau . . . . . . . . . . . . . . . . . . . . . . 105
7.5 Développement de nouveaux plugins . . . . . . . . . . . . . . . . . . . . . . . . 109
7.6 Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
8 Validation sur des modèles existants 113
8.1 Parallélisation de modèles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
8.2 Etudes de performances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
8.3 Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
9 Conclusion et perspectives 145
9.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
9.2 Perspectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Bibliographie 156
Remerciements
Je tiens à remercier en premier lieu le Professeur Laurent Philippe, mon directeur de thèse, pour sasympathie, sa disponibilité, ses idées, ses conseils et ses encouragements durant mes quatre annéesde thèse. Je voudrais également le remercier pour sa relecture et sa patience à corriger cette thèse.
Je remercie M. Kamel Mazouzi, Ingénieur de Recherche au Mésocentre de Calculs, pour sonsoutien indéfectible et ses conseils précieux tout au long de cette thèse. Son aide et ses remarquessur MCMAS ont en particulier eu une influence déterminante sur l’architecture et l’interface de labibliothèque obtenue.
Je remercie M. Christophe Lang pour son aide au cours et en dehors de nombreuses réunion,et en particulier pour ses contributions et son expertise en systèmes multi-agents, qui m’ont étéd’une assistance précieuse dans mes travaux et mon mémoire. J’exprime également ma plus pro-fonde gratitude à M. Nicolas Marilleau pour avoir été un acteur clé du choix de ce sujet et de saréalisation, en tant que personne également confrontée aux problématiques d’implémentations desystèmes multi-agents au quotidien.
M. Christophe Cambier et M. le Professeur Michaël Krajecki ont accepté d’être les rapporteurs decette thèse, et je les en remercie, de même que pour leur participation au Jury. Ils ont égalementcontribué par leurs nombreuses remarques et suggestions à améliorer la qualité de ce mémoire, etje leur en suis très reconnaissant.
MM. les professeurs Fabrice Bouquet et Stéphane Genaud m’ont fait l’honneur de participer auJury de soutenance ; je les en remercie profondément.
Tous mes remerciements vont également au Mésocentre de Calcul de Franche-Comté, qui m’arecruté en 2009 et sans lequel je n’aurais eu la chance unique d’être dans un cadre me permet-tant d’entreprendre et de réaliser cette thèse. Je remercie en particulier Cédric pour l’ambiancequotidienne dans le bureau et son expertise technique qui a été très utile à plusieurs reprises.
J’adresse également mes remerciements à tous les membres du DISC pour leur accueil au sein duDépartement d’Informatique des Systèmes Complexes de l’institut FEMTO-ST. Cela a été pourmoi un honneur de devenir leur collègue après les avoir rencontrés en tant qu’enseignants au coursde ma formation.
Je tiens à remercier le personnel de l’école doctorale SPIM pour son aide précieuse dans les dé-marches administratives.
Je tiens enfin à remercier ma famille pour son soutien indéfectible au cours de la rédaction de cettethèse, tant d’un point de vue humain que rédactionnel, pour quelqu’un comme moi qui apprécieun peu trop les longues phrases...

Introduction
Ces dernières années ont consacré l’émergence du parallélisme dans de nombreuses branchesde l’informatique, tant au niveau matériel que logiciel. Elle s’est manifestée au niveau matériel,tout d’abord, du fait de la stagnation de l’augmentation des fréquences de fonctionnement desunités de calcul, avec l’apparition d’architectures dotées de très grands nombres de coeurs. Elles’est ensuite manifestée au niveau logiciel avec la démocratisation de plates-formes d’exécutionparallèle telles que MPI ou OpenMP, ou l’apparition de nouvelles solutions comme OpenCL etCUDA, pour exploiter ce parallélisme matériel croissant.
Cette démarche de parallélisation de l’exécution peut être rapprochée du parallélisme concep-tuel mis en œuvre dans les modèles multi-agents pour faciliter la description de systèmes com-plexes. Dans ce type de modèle, l’approche choisie est de décomposer un problème difficile ou im-possible à appréhender de manière globale en sous-problèmes dont la résolution est plus simple, demanière à obtenir une solution globale. Ces sous-problèmes sont associés à des entités, ou agents,accomplissant chacun leurs tâches de manière simultanée et faisant évoluer le système dans son en-semble. Si l’adéquation entre un parallélisme d’exécution logiciel et conceptuel semble naturelle,la parallélisation reste une démarche difficile, du fait du déroulement séquentiel des opérations etdes dépendances présents dans de très nombreux modèles agents. Les plates-formes d’exécutionévoquées dans le paragraphe précédent sont généralistes, et ne sont pas spécifiquement adaptéesaux problématiques multi-agents. Cette absence de support spécialisé impose au concepteur denombreux développements de structures de données ou de traitements propres à son modèle, oul’utilisation d’une plate-forme multi-agents parallélisée fournissant déjà ces outils.
L’objectif de cette thèse est de proposer une solution commune pour faciliter l’implémenta-tion de tels modèles sur une plate-forme d’exécution massivement parallèle telle que le GPU,dont le nombre important de coeurs permet d’envisager l’exécution simultanée de grands nombresd’agents. Notre mémoire est pour cela découpé en deux parties : la présentation de notre contexte,puis celle de nos contributions.
Pour cerner notre contexte, nous présentons dans un premier temps les concepts de simula-tion et de modèle. Nous décrivons leur rôle en complément ou en remplacement de l’expériencepour permettre une meilleure compréhension du monde qui nous entoure. Cette présentation estégalement l’occasion d’introduire l’amélioration constante en précision et en taille des simula-tions nécessaire à l’avancée des connaissances et l’augmentation correspondante des ressourcesrequises. Ce besoin motive à l’heure actuelle la recherche de nouvelles solutions d’exécution pourdes simulations même modestes, exploitant efficacement plusieurs ressources matérielles.
Nous décrivons ensuite un type de système particulier, au coeur de notre sujet de thèse : lessystèmes multi-agents. Ces systèmes permettent, en décomposant le modèle à simuler en enti-tés indépendantes, les agents, d’appréhender des modèles sans loi globale de comportement. Ladynamique de ces systèmes ne dépend plus alors uniquement de règles générales, mais de l’inter-action entre un ou plusieurs algorithmes s’exécutant en parallèle. La simulation de ces systèmesrencontre, comme la simulation de manière générale, un problème de disponibilité de ressourcesen calcul et en mémoire dans le cas de grands espaces ou nombres d’individus, que nous illustronssur quelques exemples connus.
Introduction 10
L’identification de ce besoin en ressources nous amène à considérer les différentes approchesde parallélisation permettant d’y répondre, avec leurs avantages et leurs contraintes en termesd’exécution et de programmation. Cette présentation est l’occasion d’introduire les GPU, ou cartesgraphiques, qui offrent une capacité de calcul normalement inaccessible sur le CPU d’une seulemachine. Ces matériels permettent au programme de partager aisément des données dans unemême mémoire globale tout en offrant l’accès à plusieurs centaines de coeurs. Leur utilisation estcependant associée à de nombreuses contraintes, tant en termes de découpage de l’exécution qu’entermes d’utilisation et d’accès aux données, pour permettre une exécution efficace.
À la suite de cette présentation des solutions de parallélisation, nous évoquons leur applica-tion dans les simulations multi-agents. Pour cela, nous commençons par présenter les différentesapproches de découpage de l’exécution et des données généralement utilisées dans le cas de mo-dèles multi-agents. Nous présentons ensuite des plates-formes multi-agents supportant l’exécutionparallèle du modèle comme MadKit, Repast HPC, JADE ou encore FLAME. Nous décrivons en-suite l’état de l’art des solutions permettant actuellement d’utiliser le GPU pour exécuter tout oupartie d’un modèle multi-agents. Ces solutions peuvent être classées en deux catégories princi-pales, l’utilisation directe de modèles de programmation génériques comme CUDA ou OpenCLou l’utilisation d’une bibliothèque d’abstraction telle que FLAME-GPU.
Ces deux catégories laissent cependant une ouverture pour une approche intermédiaire qui faci-literait la réalisation de simulations ou de traitements multi-agents sur GPU sans imposer l’utilisa-tion d’une plate-forme de développement multi-agents particulière, contrairement à FLAME-GPUavec le formalisme FLAME. La définition de cette problématique nous sert de transition pour laprésentation de nos contributions, en seconde partie, et en particulier de MCMAS 1, une biblio-thèque d’exécution multi-agents sur GPU développée pour répondre à ces besoins.
Notre première contribution est la présentation de l’adaptation d’un modèle multi-agents connu,le système proie-prédateur, sur GPU, pour mettre en évidence sur un cas concret les changementsen termes de structures de données et de découpage de l’exécution nécessaires au portage de cetype de simulation.
Cet exemple concret nous sert ensuite de fil rouge pour définir trois grandes approches de paral-lélisation du modèle sur GPU : une adaptation complète de la simulation, une délégation manuellede certains traitements, ou la réutilisation de fonctions de haut niveau existantes. Ces approchesnous permettent de définir les interfaces attendues par ces scénarios. L’adaptation complète ou par-tielle du modèle nécessite en effet une connaissance ainsi qu’un contrôle fin d’un modèle d’exécu-tion tel que OpenCL ou CUDA. Au contraire, la parallélisation de certains traitements uniquementencourage une interface de programmation la plus simple possible pour le concepteur, de manièreà faciliter son intégration et son utilisation dans de nombreux modèles existants sans connaissanceparticulière des détails d’implémentation.
Notre bibliothèque MCMAS vient répondre à ces types d’utilisations au moyen de deux inter-faces de programmation, une couche de bas niveau MCM 2 et un ensemble de plugins utilisablessans connaissances GPU. Nous présentons tout d’abord l’architecture qui résulte de ces deux pers-pectives d’utilisation, ainsi que la manière dont certaines de ces fonctions sont assurées, avant dedécrire l’utilisation de l’interface haut niveau de notre bibliothèque et l’ajout de fonctionnalités aumoyen de nouveaux plugins.
Nous étudions ensuite l’utilisation de cette bibliothèque sur trois systèmes multi-agents dis-tincts : le modèle proie-prédateur, notre fil rouge, le modèle MIOR et le modèle Collemboles. Ces
1. Many-Core Multi-Agent Systems2. Many-Core Manager

Introduction 11
applications sont l’occasion d’effectuer une étude des performances obtenues sur plusieurs typeset générations de cartes graphiques par chaque modèle et des facteurs contribuant à une exécutionefficace sur GPU.
Nous présentons également une synthèse de l’expérience acquise en proposant quelquesconseils pour implémenter un modèle sur cette architecture. Ces observations, tant en termes deressources ou de stockage de données qu’en termes de précision des traitements, visent à faciliterune utilisation efficace du grand nombre de supports d’exécution gérés par MCMAS.
Nous dressons enfin un bilan du travail et des réflexions présentées dans notre mémoire, avantd’évoquer quelques pistes possibles d’amélioration de notre solution. L’objectif de ces pistes est defavoriser l’extension et l’utilisation de notre bibliothèque, en proposant des couches d’adaptationsdans des plates-formes existantes, la gestion de nouvelles structures de données, ou encore lesupport transparent d’une plus grande variété de configurations d’exécution.

IContexte


15
Dans cette première partie, nous présentons tout d’abord le contexte de nos travaux, de manièreà définir la portée de notre sujet et à introduire la problématique à laquelle nous avons souhaitérépondre : la parallélisation efficace de systèmes multi-agents sur architecture à grand nombre decœurs.
Nous commençons par introduire le domaine de la simulation et des systèmes multi-agents etce qu’ils représentent. Nous abordons ensuite la problématique du besoin en ressources rencon-trées par ces modèles, lorsque nous cherchons à améliorer la précision et/ou la taille du modèle,et en quoi la parallélisation est une solution à ce besoin. Nous évoquons alors en quoi les moyensmatériels associés à cette parallélisation peuvent être coûteux, et présentons les GPU, une archi-tecture matérielle permettant de disposer de plusieurs centaines de coeurs d’exécution sur unemachine locale. Après avoir présenté cette architecture, nous dressons un état de l’art des déve-loppements et portages de systèmes multi-agents déjà réalisés sur GPU, ainsi que la présentationd’une plate-forme multi-agents générique d’exécution sur GPU, FLAME-GPU.

1Les systemes multi-agents
Avant de présenter les systèmes multi-agents et l’utilisation que nous en feront, il est nécessairede présenter le rôle d’une simulation, mais également de définir les concepts de modèle et demodélisation qui seront utilisés très largement dans la suite de notre propos.
1.1 Science et simulation
Dans cette section, nous commençons par présenter le contexte d’apparition de la simulationnumérique, puis son principe. Nous définissons ensuite les termes de modèle et simulation avantd’étudier plusieurs classifications possibles des approches de modélisation permettant de passerd’un modèle à une simulation.
1.1.1 Principe de la simulation
La résolution de problèmes est l’un des moteurs de la recherche et de l’innovation technique.Si cette résolution a longtemps été effectuée manuellement, elle est de plus en plus confiée auxordinateurs à même de réaliser d’importants volumes d’opérations. Avant de pouvoir résoudre unproblème, il est cependant essentiel de disposer d’outils permettant de le décrire puis de le mesurer.C’est le rôle de l’expérience et de la simulation.
Une simulation est par nature la reproduction d’un phénomène en dehors du contexte dans le-quel il se déroule habituellement. Cette simulation peut être de nature physique, sous la formed’une expérience, ou dématérialisée sur un support informatique, auquel cas on parlera de simu-lation numérique. L’objectif est généralement de pouvoir étudier le phénomène en le reproduisantet en l’observant.
Un premier moyen d’observer et de décrire un phénomène est la mise en place d’un protocoleexpérimental. Ce protocole décrit un ensemble de conditions fixées ou variables où sera observél’évolution de certaines métriques. Son objectif est de permettre un contrôle des résultats en assu-rant que l’observation soit ciblée et reproductible.
La réalisation ou la reproduction d’un phénomène dans sa globalité n’est cependant pas tou-jours financièrement ou pratiquement réalisable. Il est alors nécessaire de recourir à une représen-tation alternative généralement simplifiée du réel, le modèle. Dans le cas d’études topographiquessur l’érosion, il n’est ainsi pas possible de mettre sous serre une vaste étendue de territoire demanière à assurer des conditions contrôlées et reproductibles. De la même manière, le fait de de-mander à plusieurs milliers d’individus de reproduire à loisir un comportement pré-établi impliqueune coordination stricte faussant les résultats attendus.
CHAPITRE 1. LES SYSTÈMES MULTI-AGENTS 18
L’objectif d’un modèle est de proposer une représentation de la réalité, de manière à en faci-liter la compréhension. Sa conception se base sur des lois déduites d’un corpus d’observations etd’expériences.
Ce modèle peut ensuite être associé à des scénarios d’exécution reproduisant le phénomèneobservé correspondants à des conditions particulières pour en faire une simulation informatique.
Après cette courte introduction, nous allons maintenant définir formellement ces concepts.
1.1.2 Définitions : modèle, simulation
Le modèle est une représentation d’un phénomène ou d’un système permettant de le rendreplus aisément manipulable, comme souligné par cette définition proposée par Peter Haggett en1973 [Hag73] :
Définition (modèle) : les modèles sont des représentations schématiques de la réalité, élaborésen vue de la comprendre et de la faire comprendre.
Cette simplification implique une approximation du système simulé : un modèle est donc unevision simplifiée de la réalité.
Wilson [Wil74] propose de son côté une définition de la simulation indépendante de toutenotion de modèle :
Définition (simulation) : par nature, une simulation est quelque chose pouvant être lancé, mo-difié, et produisant des résultats (exemple du crash-test). Peut être de nature physique (expériencedans un environnement contrôlé) ou dématérialisée (informatique).
Cette définition met en avant l’indépendance entre les concepts de modèle et de simulation :une simulation est avant tout un moyen de produire des résultats, que ce soit à de manière physiqueou informatique.
Le passage d’un système concret à un modèle de simulation correspond à un processus nommémodélisation.
1.1.3 Un continuum d’approches de modélisation
Notre contexte de travail est celui des systèmes multi-agents. Afin de situer ce contexte, nousrappelons ici les caractéristiques des principales approches de modélisation, qu’elles reposentsur l’utilisation de lois mathématiques de type équations différentielles ou statistiques ou sur laconception d’algorithmes représentant le comportement d’entités individuelles.
Nous proposons ici deux axes possibles de caractérisation de ces approches de modélisation.Ces caractérisations ne doivent pas être considérées comme hermétiques, car certaines démarchesreprennent des éléments de chacune de ces approches de modélisation pour décrire des aspectsdifférents d’un même modèle.
CHAPITRE 1. LES SYSTÈMES MULTI-AGENTS 19
Modélisation ascendante ou modélisation descendante
Un premier axe de classification des approches de modélisation est la direction, descendanteou ascendante, dans laquelle cette démarche est appliquée au système simulé [CKQ+07, Jac98].
Dans une approche descendante (ou top-down), un comportement global est appliqué à tous leséléments particuliers du modèle. Il est par exemple possible, en observant l’évolution de la quantitéd’oxygène présente dans l’environnement de bactéries aérobies, d’en déduire une loi décrivant ladynamique générale du système. Cette loi peut alors être utilisée pour reproduire cette évolution demanière informatique sous forme de modèle, sans avoir à réaliser à nouveau l’expérience concrète.
En appliquant les mêmes lois à tout le système, cette modélisation rend cependant difficile ladescription de comportements émergents des entités simulées entraînant une évolution non linéairedu modèle du fait de conditions particulières.
Dans le cas de ces comportements émergents en effet, seul le comportement de chaque élémentest connu : il devient nécessaire d’adopter une approche ascendante (ou bottom-up). Le comporte-ment du modèle dans son ensemble n’est alors plus globalement décrit par des lois globales maispar une combinaison d’algorithmes représentant les comportements locaux présents dans le sys-tème. Dans de nombreux systèmes biologiques, l’équilibre du métabolisme est basé sur l’interac-tion de processus antagonistes tels que la constitution de réserves de nutriments et la reproduction.L’évolution du système est alors directement déterminée par les conditions environnementales etl’impact résultant de chacun de ces mécanismes, ce qui rend une prévision a priori de l’évolutionglobale du système moins accessible. L’approche ascendance permet alors une modélisation plusadaptée, basée sur la description des comportements de chaque sous-élément du système.
Le choix de l’une ou l’autre de ces approches de modélisation est fonction du niveau de connais-sance initial du système et du type de résultats souhaités, locaux ou portant sur l’évolution globaledu modèle.
Simulation continue et simulation à événements discrets
Une autre distinction est effectuée dans la littérature [BPL+06, Fuj03] entre les simulationscontinues et les simulations à événements discrets (DES).
Une simulation continue permet de représenter des phénomènes par nature ininterrompus ditscontinus. Dans le cas d’une diffusion thermique dans un solide, il est ainsi possible de définirl’état du système à n’importe quel instant au moyen de fonctions mathématiques, généralementdes équations différentielles. Dans ce cas, le choix de l’échelle de temps retenue est arbitraire etdépend uniquement de la durée et de la fréquence de l’observation demandée.
Une simulation à événements discrets permet au contraire de décrire des systèmes dont l’évo-lution dépend d’événements particuliers : en l’absence de ces éléments déclencheurs, la simulationdemeure statique. Un exemple de système à événements discret est une chaîne de production, inac-tive en l’absence de tâches à traiter. Ce type de simulation peut être décrit sous la forme de réseauxde Petri conçus pour la description de systèmes basés sur des variables discrètes, ou encore sousforme de systèmes multi-agents.
Certaines simulations peuvent présenter à la fois des comportements discrets et continus. L’évo-lution de la position d’une balle en chute libre obéit ainsi à une loi continue, mais le sens du mou-vement de cette balle est modifié de manière discrète par tout contact avec un autre objet, qu’ils’agisse du sol ou d’un autre obstacle. Il est dans ce cas possible de recourir à des simulationscontinues à événements discrets, ou simulations hybrides, associant ces deux fonctionnements.
CHAPITRE 1. LES SYSTÈMES MULTI-AGENTS 20
1.2 Les systèmes multi-agents
Après avoir présenté la simulation de manière générale, nous nous intéressons plus spécifi-quement aux systèmes et aux simulations multi-agents. La simulation à base d’agents centre lemodèle sur des entités indépendantes nommées agents. Des comportements et des données sontassociés à chacun de ces agents, de manière à obtenir des informations sur le modèle global : lamodélisation à base d’agents est donc une modélisation de type ascendante permettant de simulerun environnement à partir de ses composants élémentaires.
Les modèles basés sur ce paradigme de conception sont dits modèles multi-agents. Les simula-tions réalisées à partir de ce type de modèles sont alors appelées simulations multi-agents.
Ce type particulier de simulations peut être décomposé en deux sous-classes [Fuj03] de simu-lations à événément discrets :
— Les simulations discrètes par pas de temps (time-driven). Dans ce cas l’évolution du sys-tème est guidée par le temps découpé en pas réguliers parcourus par la simulation.
— Les simulations discrètes par événément (event-driven). Dans ce cas l’évolution du systèmeest guidée par une chaîne chronologique d’événements.
1.2.1 Définition et concepts
Il est important de définir le concept d’agent pour comprendre celui de système multi-agents.Pour cela, nous nous référons à la définition proposée par Jacques Ferber dans [Fer95] :
On appelle agent une entité physique ou virtuelle
— qui est capable d’agir dans un environnement,— qui peut communiquer directement avec d’autres agents,— qui est mue par un ensemble de tendances (sous la forme d’objectifs individuels ou d’une
fonction de satisfaction, voire de survie, qu’elle cherche à optimiser),— qui possède des ressources propres, et qui est capable de percevoir (mais de manière limi-
tée) son environnement,— qui ne dispose que d’une représentation partielle de cet environnement (et éventuellement
aucune),— qui possède des compétences et offre des services,— qui peut éventuellement se reproduire,— dont le comportement tend à satisfaire ses objectifs, en tenant compte des ressources et des
compétences dont elle dispose, et en fonction de sa perception, de ses représentations etdes communications qu’elle reçoit.
Cette définition met en avant les capacités d’action sur l’environnement et de communicationassociées à ces agents. Elle souligne également la vision partielle de l’environnement associéeà chaque agent, dont l’évolution est déterminée par cette perception partielle plutôt que par uneconnaissance globale du modèle.
Cette notion d’agent n’a de sens que comme partie d’un système plus large, le système multi-agents, sans lequel ces possibilités de communication sont inutiles. Ferber propose également,dans le même ouvrage, une définition de ces systèmes :
On appelle système multi-agents (ou SMA) un système composé des éléments suivants :
— Un environnement E, c’est-à-dire un espace disposant généralement d’une métrique.— Un ensemble d’objets O. Ces objets sont situés, c’est-à-dire que, pour tout objet, il est
CHAPITRE 1. LES SYSTÈMES MULTI-AGENTS 21
possible, à un moment donné, d’associer une position dans E. Ces objets sont passifs,c’est-à-dire qu’ils peuvent être perçus, créés, détruits et modifiés par les agents.
— Un ensemble A d’agents, qui sont des objets particuliers (A ∈ O), lesquels représentent lesentités actives du système.
— Un ensemble de relations R qui unissent des objets (et donc des agents) entre eux.— Un ensemble d’opérations Op permettant aux agents de A de percevoir, produire, consom-
mer, transformer et manipuler des objets de O.— Des opérateurs chargés de représenter l’application de ces opérations et la réaction du
monde à cette tentative de modification, que l’on appellera les lois de l’univers.
L’implémentation d’un système multi-agents débute par la conception ou le choix d’un modèlemulti-agents basé sur des agents, un environnement et les interactions entre ces entités [DSJD02].Ces interactions et cette organisation définissent la fonction, le type et les scénarios de commu-nication possibles dans le système simulé [JOF03]. En fonction du modèle, ces communicationspeuvent être directes ou indirectes, par le biais des mises à jour de l’environnement perçues ensuitepar d’autres individus.
Les systèmes multi-agents représentent un continuum de simulation très large, s’étendantd’exemples très simples à des problèmes proches de l’intelligence artificielle. Cette diversité desproblématiques est reflétée par le vaste vocabulaire employé par cette communauté scientifique,mêlant des concepts tels que celui d’agent à des notions moins directes d’objectif, de croyance oude perception.
Un aspect présent dans de nombreux systèmes multi-agents est celui d’environnement. L’envi-ronnement décrit l’espace dans lequel évoluent les agents, sa structure (composition, agencement)et sa dynamique. Il peut être considéré comme un agent spécifique ou comme un simple ensemblede structures de données partagées. Il est typiquement chargé du stockage des propriétés globalesau modèle, mais peut être associé à d’autres fonctions :
— Il peut remplir des fonctions à l’échelle du modèle telles que la gestion du temps ou la miseà jour des paramètres globaux à chaque itération.
— Il peut servir d’espace de stockage de tout ou partie des informations des agents.— Il peut également remplir le rôle de médium de communication.
Des normes telles que FIPA [fip] ont été proposées pour standardiser l’implémentation de cetype de simulations. Cette norme, publiée en 1997, établit de nombreuses règles liées aux modesde communications et d’interactions entre agents par le biais d’échanges de messages. Elle estbasée autour de trois rôles particuliers :
— Le système de gestion d’agents (Agent Management System, ou AMS), responsable de lasupervision de l’accès et de l’usage de la plate-forme. Il assure en particulier l’authentifi-cation des agents présents et le contrôle des nouveaux enregistrements.
— Le canal de communications entre agents (Agent Communication Channel, ou ACC) four-nit l’infrastructure de communication entre agents. Cette interface doit être compatibleavec le protocole IIOP, pour garantir l’interopérabilité entre plates-formes multi-agents.
— L’assistant d’annuaire (Directory Facilitator, ou DF) propose un service de recherche auxagents de la plate-forme pour découvrir facilement les autres agents présents dans le mo-dèle.
CHAPITRE 1. LES SYSTÈMES MULTI-AGENTS 22
1.2.2 Agents réactifs, agents cognitifs
Il est courant d’effectuer dans les systèmes multi-agents une distinction entre agent cognitif etréactif [WD92, CDJM01] en fonction de leurs capacités d’action et de raisonnement.
Un agent cognitif dispose d’une mémoire de son passé et de son environnement lui permettantd’effectuer des déductions sur celui-ci et d’en prédire de futures évolutions. Le comportement del’agent est déterminé par des intentions, correspondant à des objectifs à atteindre, et orientant leschoix effectués entre plusieurs actions possibles. Ce type d’agent est utilisé pour représenter desindividus dotés d’une intelligence propre. Celle-ci est alors souvent décrite sous la forme d’unmoteur d’inférence intégré dans l’agent. Un exemple d’agent cognitif est ainsi le modèle proposépar J. Doran [DP93] pour décrire les évolutions sociales des sociétés du Paléolithique dans lesud-ouest de la France en fonction de la répartition des ressources. Cet article met en évidencel’importance des décisions prises par des individus particuliers sur la base d’une vision à moyen etlong terme, plutôt qu’en simple réaction à une situation immédiate, pour expliquer les évolutionsde peuplement observées en archéologie.
Un agent réactif ne peut au contraire que réagir à l’état instantané du système. Son compor-tement peut être caractérisé en se basant sur la psychologie comportementale comme purementS-R (Stimulus-Reaction), où S représente un état particulier de l’environnement et R une séried’actions élémentaires entreprises par l’agent en réaction à cet état. De tels comportements sontrencontrés aussi bien pour des animaux [McF87] que pour des créatures artificielles [Mae90].
La séparation entre agents réactifs et cognitifs n’est pas très nette, et certains agents mélangentdonc des comportements réactifs et cognitifs. Cette vision à plus ou moins long terme de l’en-vironnement a un impact important sur la complexité de chaque agent et donc sur celle de sonimplémentation.
1.2.3 Implémentation de modèles agents
Les systèmes multi-agents les plus simples peuvent être implémentés sous forme d’automatescellulaires. Ces automates sont également souvent utilisés pour représenter l’environnement desystèmes multi-agents plus complexes [SFS10].
Comme toute simulation informatique, l’exécution de simulations multi-agents requiert desressources tant en termes de mémoire, pour stocker les données du système, qu’en temps de calculpour le faire évoluer. Dans le cas des simulations multi-agents, ces besoins dépendent de deuxfacteurs principaux :
— Des ressources requises par l’environnement. S’il s’agit d’un environnement stockant desdonnées pour chaque unité de l’espace de simulation, les ressources mémoires requisespour représenter cet espace seront alors proportionnelles à sa taille. Si un traitement estassocié sur chacune de ces unités, le temps d’exécution associé aux processus de l’envi-ronnement va également en augmentant.
— Des ressources requises par les agents. Une augmentation du nombre d’agents impliqueune augmentation du nombre d’attributs à représenter, ainsi que du nombre d’individus àfaire évoluer.
D’autres parties de la simulation, comme la récupération ou le stockage de résultats, contribuentégalement à ces besoins en ressource. Leur impact n’est cependant pas nécessairement lié à la tailledu système simulé. Dans la suite de cette section, nous allons illustrer dans le cadre de quelquesimulations multi-agents connues l’impact des agents ou de l’environnement sur la consommation
CHAPITRE 1. LES SYSTÈMES MULTI-AGENTS 23
en ressources en fonction de la taille du système simulé.
1.2.4 Exemples de modèles
Jeu de la vie
L’exemple le plus connu de modèle multi-agents simple implémenté sous la forme d’automatecellulaire est probablement le Jeu de la Vie (Game of Life), imaginé en 1970 par John HortonConway [Gar70]. Ce modèle est constitué d’une simple grille dont chaque cellule est soit "vivante"soit "morte". L’évolution de l’état de chaque cellule à la prochaine itération est déterminé par lenombre de ses voisines vivantes à l’itération précédente :
— Une cellule morte possédant exactement trois voisines vivantes devient vivante.— Une cellule vivante possédant deux ou trois voisines vivantes le reste.— Une cellule vivante meurt dans le reste des cas.
Ce système simple est souvent employé comme exemple d’introduction à l’utilisation de plates-formes agent [Mic02, net], pour en présenter les concepts et la syntaxe fondamentale dans le cadred’un modèle connu.
La seule structure de données du système dans ce cas est l’environnement. Comme cet envi-ronnement décrit toutes les cellules possibles, la mémoire requise est directement fonction de sataille : si celle-ci double, la consommation en mémoire sera alors multipliée par quatre (espace endeux dimensions).
Le temps d’exécution est également directement lié à la taille de cet environnement grille, lemême traitement devant systématiquement être appliqué à chaque cellule. Comme chaque trai-tement ne s’applique qu’à la cellule locale, la quantité totale de traitements à exécuter à chaqueitération est proportionnelle à la taille de l’environnement. Ce modèle très simple peut donc de-venir coûteux à grande échelle et, de ce fait, nécessiter des ressources de calculs parallèle pourexplorer de grandes tailles de modèles [MCM12].
Abeilles
Un autre modèle largement représenté dans les différentes plates-formes multi-agents et la lit-térature est le mouvement d’essaims d’abeilles. Dans cet essaim, chaque agent est associé à uneposition dans un espace de simulation en deux ou trois dimensions, l’environnement. La positionde chaque individu est ensuite mise à jour à chaque itération de manière à pouvoir observer lecomportement global de l’essaim.
Ce modèle met en jeu deux types d’agents :
— La reine : cet agent particulier se déplace aléatoirement dans l’espace.— L’abeille ouvrière : cet agent tend à se rapprocher de la reine de l’essaim en ajustant sa
direction de déplacement. Si plusieurs reines sont en présence, l’individu sélectionne l’unede ces reines, ce qui peut induire des changements d’essaim.
Ce modèle est une excellente illustration de l’apparition d’un comportement émergent com-plexe, la création, la fusion et l’évolution de la forme d’un ou plusieurs essaims, à partir d’algo-rithmes simples. Le comportement observé varie en fonction des paramètres de la simulation et enparticulier de la vitesse de déplacement ou du champ de vision de chaque individu.
Dans ce modèle, contrairement au jeu de la vie, l’environnement n’est plus une véritable struc-
CHAPITRE 1. LES SYSTÈMES MULTI-AGENTS 24
ture de données séparées, mais un espace dans lequel une position est associée à chaque agent. Iln’est pas non plus associé à ses propres traitements.
Les besoins en mémoire et en calcul sont donc cette fois directement dépendants du nombred’agents présents dans le système. Les besoins en mémoire évoluent de manière linéaire avec lenombre total d’agents présents dans le système, et donc la quantité d’attributs à stocker. L’évolutiondes besoins en calcul est cette fois encore linéaire, mais proportionnelle au nombre d’abeillesouvrières présentes dans le modèle, plutôt qu’à la taille de l’environnement.
Fourmis
Un autre modèle multi-agents connu est celui de la colonie de fourmis, représentant le déplace-ment des individus d’une fourmilière à la recherche de nourriture. Il est possible d’identifier troistypes d’agents dans ce système :
— La fourmilière. Cet agent fixe représente le point de départ et de retour des fourmis. Il estsouvent responsable du stockage de la nourriture de manière à permettre la présence deplusieurs colonies dans une même simulation.
— Le dépôt de nourriture. Il est représenté soit sous la forme d’un agent fixe dans le cas d’unespace de simulation continu, soit sous la forme d’une donnée associée à chaque unité del’environnement.
— La fourmi, seul agent mobile capable de se déplacer dans l’environnement. Sa fonction estde localiser et de ramener de la nourriture à sa fourmilière.
L’évolution globale de la simulation est déterminée par le mouvement des fourmis et la réparti-tion géographique des fourmilières et des ressources dans l’environnement. La vitesse de collectede nourriture peut alors être utilisée comme métrique d’évaluation de différentes stratégies de dé-placement appliquées aux fourmis. Dans les cas les plus simples, ces déplacements sont effectuésde manière aléatoire, mais un comportement plus réaliste est le dépôt et la prise en compte dephéromones dans l’environnement. Ces marqueurs chimiques encouragent l’individu à privilégiercertaines directions de déplacement, et permettent l’émergence puis l’optimisation de cheminsparticuliers pour la récolte des ressources sans intelligence centrale directrice. Dans ce cas, l’envi-ronnement joue à la fois le rôle de mémoire et de médium d’interaction indirect entre individus.
Ce troisième exemple représente un cas où l’environnement et les agents correspondent chacunà des structures de données et des traitements distincts, et contribuent donc tous deux aux besoinsen termes de mémoire et de calcul. L’évolution des ressources en fonction de la taille du modèleet du nombre d’agents reprend à la fois des aspects du jeu de la vie et des abeilles :
— La consommation en mémoire est proportionnelle à la taille de l’environnement et dunombre d’agents : si la taille du modèle est multipliée par deux, le nombre de cellules de-vant être stockées est multiplié par quatre, si une grille discrète de phéronomes est utilisée.De même, si le nombre d’agents fourmis est multiplié par deux, la mémoire est égalementmultipliée par deux, pour stocker les données de ces individus supplémentaires.
— La consommation en temps de calcul est proportionnelle de la même manière à la taillede l’environnement, du fait de la nécessité de calculer la diffusion des phéromones dans lagrille à chaque itération. Elle est également proportionnelle au nombre d’individus dont ledéplacement doit être géré.
Il est important de noter que ces constatations ne sont valables que si l’environnement utilisé estune grille. Dans le cas où les phéromones seraient considérées comme des agents fixes, l’évolutiondes besoins en ressources se rapproche à nouveau de celle du modèle des abeilles.
CHAPITRE 1. LES SYSTÈMES MULTI-AGENTS 25
1.2.5 Représentation de l’espace de simulation
Si les modèles évoqués jusqu’à présent stockent les informations de positionnement soit sousforme de coordonnées à l’intérieur de chaque agent, soit sous forme de structures de grille endeux ou trois dimensions, de nombreuses autres solutions de représentation sont possibles pourl’environnement du système et l’emplacement des agents.
Galland et all [GGDK09] proposent ainsi pour le positionnement en milieu urbain deux ap-proches complémentaires :
— L’utilisation d’une carte de hauteur (heighmap), où chaque pixel indique l’altitude du pointde l’espace simulé correspondant. L’information est alors encore une fois représentée sousforme de grille, ici une image.
— L’utilisation d’un modèle de positionnement des objets.
L’objectif de cette seconde représentation est de permettre un accès rapide à la position et àl’orientation des objets présents dans le modèle. L’environnement est découpé en zones décritespar un graphe, pour un environnement en une dimension, ou par un arbre spatial. Chacun desobjets du système est alors associé au noeud correspondant aux zones où il est situé, de manièreà rapidement pouvoir déterminer les objets présents ou non dans un espace donné. Il est possibleà un objet d’appartenir à plusieurs zones, s’il se trouve sur une frontière : dans ce cas, l’objet estcopié et stocké à plusieurs endroits de la structure.
Si dans ce cas la représentation sous forme de graphe est utilisée en complément d’une grille,de nombreux environnements multi-agents basés sur des axes de circulation discrets peuvent êtreentièrement représentés sous forme de graphe. Ces structures se retrouvent au sein de nombreuxmodèles de recherche de chemin dans la littérature agent, en particulier dans le cas de simulationsde trafic routier [SN09].
1.2.6 Synthèse
L’étude des modèles du jeu de la vie, des abeilles ou des fourmis permet de mettre en évi-dence que l’exécution d’une simulation multi-agents peut rapidement devenir coûteuse, particu-lièrement dans le cas où l’environnement est représenté sous la forme d’une structure de donnéesde type grille ou si le temps d’exécution de chaque agent est proportionnel à la quantité d’indivi-dus présents dans le modèle. Plusieurs scénarios sont à même d’imposer des simulations de tailleimportante, en espace de simulation ou en nombre d’agents.
Un premier scénario est la volonté de simuler des systèmes mettant eux-même en jeu des es-paces géographiques ou des populations importantes. C’est par exemple le cas de la simulationd’une ville : une simulation doit alors idéalement être capable de traiter tout son espace et seshabitants dans une même exécution, pour garantir une bonne représentation du système. Cetteproblématique est au coeur de projets comme MIRO [BBMC+10], qui vise à étudier la mobilitéurbaine.
Un deuxième scénario est celui des systèmes multi-échelles, où des simulations de portées trèsdifférentes doivent être couplées. Un exemple de tel système est Sworm [BMD+09], dédié à lamodélisation de l’évolution des sols. Dans ce modèle, les principaux intervenants sont les versde terre, à même de consommer et diffuser de la matière organique dans le sol. Cette matièreorganique fait également l’objet d’une évolution d’origine microbienne. Dans ce cas, la simulationmême d’un petit volume de sol implique la réalisation de très grands nombres de simulationsmicroscopiques MIOR.
CHAPITRE 1. LES SYSTÈMES MULTI-AGENTS 26
Un dernier scénario enfin est de vouloir garantir l’apparition des comportements observés enpratique au sein de la simulation. Une simulation de trafic proposée par Strippgen [SN09] meten avant, même dans le cas où le système peut être décomposé à loisir, l’importance de taille oude populations minimales pour voir émerger certains comportements. Dans ce cas, utiliser unesimulation de trop petite taille, même quand c’est possible, est susceptible de fausser les résultatsobservés par rapport à une situation de taille plus importante.
Cette utilisation d’environnements de grande taille ou de populations agents importantes estsusceptible d’amener deux types de problèmes :
— Des besoins en mémoire ne pouvant plus être assurés par une seule machine.— Des temps d’exécution très longs. Ces temps sont ainsi de l’ordre de la semaine dans le cas
du modèle Sworm.
Le recours à la parallélisation de l’exécution du système est une solution possible à ces deuxlimitations, comme nous l’abordons dans la suite.
2Modeles d’execution et de programmation
paralleles
La parallélisation est une solution pour accélérer l’exécution d’un programme ou pour per-mettre le traitement de données de taille plus importante en les répartissant sur plusieurs machines.Il est possible de distinguer deux grands modèles d’exécution en parallèle : la parallélisation enmémoire partagée et la parallélisation en mémoire distribuée. Dans ce chapitre, nous présentonsces deux modèles de parallélisation ainsi que des exemples d’outils en facilitant l’exploitation.Nous illustrons également leur impact sur le découpage des données et de l’exécution d’un pro-gramme.
Dans les sections suivantes, nous présentons tout d’abord en quoi cette parallélisation vient enréponse aux besoins en ressources de calcul. Nous nous focalisons ensuite sur la parallélisationen mémoire partagée, et son exploitation par le biais des interfaces de programmation OpenMPet OpenACC. Nous présentons ensuite la parallélisation en mémoire distribuée et l’interface deprogrammation MPI, avant d’évoquer la parallélisation hybride combinant ces deux approches.Nous nous intéressons enfin à une nouvelle architecture d’exécution, le GPU, et voyons son mo-dèle de programmation et ses apports par rapports aux architectures d’exécution traditionnellesen mémoire partagée ou en mémoire distribuée. Ces présentations nous permettent de définir lesconcepts utilisés pour la parallélisation des systèmes multi-agents.
2.1 Une réponse à des besoins en calcul
Une constante universelle de la recherche scientifique est la nécessité permanente d’avancerplus loin dans la connaissance. Ce progrès peut être obtenu en ouvrant de nouvelles voies de re-cherches ou en améliorant les connaissances existantes, au moyen d’expérimentations plus précisesou de taille plus importante.
A l’origine, ce processus a été purement mécanique, motivant l’invention de capteurs ou deméthodes de mesure du temps toujous plus fiables. Son application aux simulations informatiquesse traduit désormais en besoins croissants en ressources mémoires et d’exécution.
La progression en puissance de calcul du matériel a longtemps été assurée par l’accroissementdes fréquences de fonctionnement des processeurs. Une augmentation en fréquence a en effetpour avantage de permettre à un programme limité par la vitesse du processeur de s’exécuter plusrapidement sans la moindre adaptation, à performance constante par cycle d’horloge.
Cette augmentation de la fréquence a toutefois été freinée par l’apparition de multiple obstaclesphysiques, notamment en termes de miniaturisation et de densité thermique. L’accroissement dela puissance de calcul implique à présent une multiplication du nombre de coeurs d’exécution

CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 28
soit de manière locale (processeur multi-coeurs), soit de manière distante en interconnectant denombreuses machines (clusters de calculs). La parallélisation des programmes est alors un moyende tirer parti de cette nouvelle répartition des ressources d’exécution.
La démarche de parallélisation est également motivée par l’accroissement des besoins en mé-moire des programmes. Si le passage de nombreuses architectures au 64 bits permet maintenantl’adressage de très grands espaces de travail, les quantités de mémoire physiquement utilisablessur une même machine restent limitées. Dans ce cas la parallélisation permet d’additionner lescapacités mémoires fournies par plusieurs machines.
Ce besoin croissant en puissance de calcul est illustré par l’augmentation d’année en annéedes capacités offertes par les plus puissants clusters mondiaux du TOP500 1. Les premières placesde ce classement étaient ainsi occupées par des solutions de l’ordre de la centaine de TeraFlops(1000 milliards, ou 1012 opérations flottantes par seconde) en juin 2005, puis du PetaFlops (1015
opérations) en juin 2009. En novembre 2013, les premières machines du classement proposentmaintenant des puissances de plusieurs dizaines de PetaFlops.
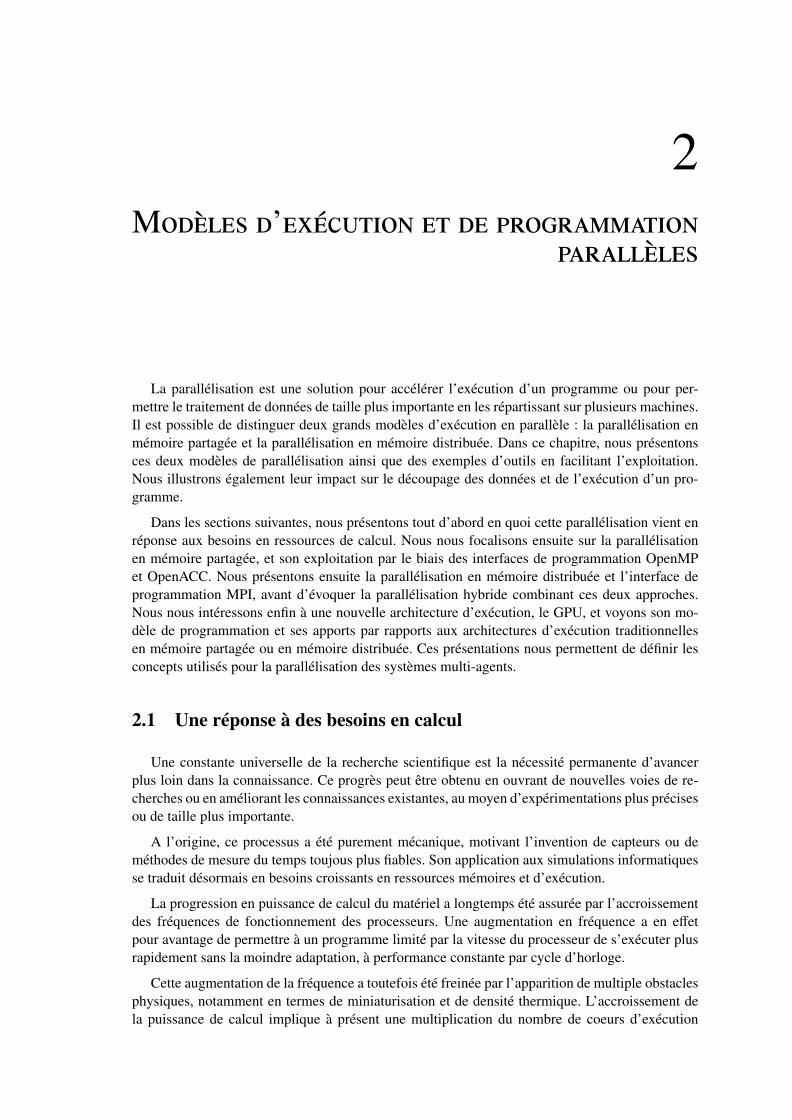
Si cette parallélisation est un moyen d’accéder à davantage de ressources d’exécution, les gainsen termes de temps obtenus dépendent directement de la fraction de temps d’exécution du pro-gramme à même d’être parallélisée par rapport à celle devant demeurer séquentielle. La loi d’Am-dahl [Amd67], énoncée en 1967, rappelle que le gain de performance pouvant être attendu de laparallélisation d’une partie d’un programme est directement proportionnel à la fraction du tempsd’exécution correspondant.
Ta = (1 − s)T +sTAc
S =TTa=
1(1 − s) + s
Ac
Où sont représentés :— T le temps d’exécution du programme avant parallélisation.— Ta le temps d’exécution du programme après parallélisation.— s la fraction du temps T concernée par l’amélioration.— Ac le facteur d’accélération obtenue sur la portion concernée.— S le facteur d’accélération globale.
En pratique, l’application de cette loi se manifeste par une stagnation des performances au-delàd’un certain nombre de coeurs. Celle-ci survient d’autant plus rapidement que la fraction de tempsparallélisée diminue, tel qu’illustré par la Figure 2.1.
2.2 Parallélisation en mémoire partagée
2.2.1 Modèle d’exécution
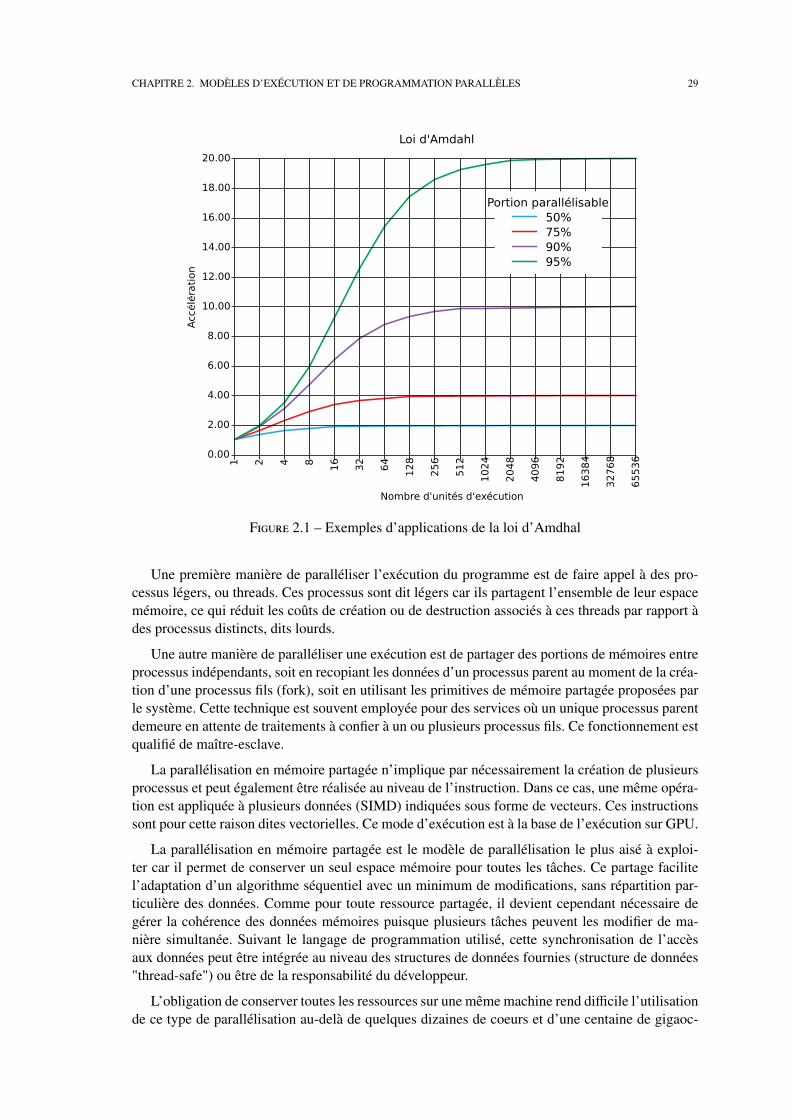
La parallélisation en mémoire partagée est un modèle d’exécution permettant de tirer parti deressources de calcul parallèles sur une même machine en découpant l’exécution du programme enplusieurs fils d’exécutions disposant d’un accès à un espace mémoire commun (Figure 2.2).
1. http ://www.top500.org/
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 29
20.00
18.00
16.00
14.00
12.00
10.00
8.00
6.00
4.00
2.00
0.00
Accélé
rati
on
1 2 4 8
16
32
64
128
256
512
1024
2048
4096
8192
16384
32768
65536
Nombre d'unités d'exécution
Loi d'Amdahl
Portion parallélisable
50%
75%
90%
95%
Figure 2.1 – Exemples d’applications de la loi d’Amdhal
Une première manière de paralléliser l’exécution du programme est de faire appel à des pro-cessus légers, ou threads. Ces processus sont dit légers car ils partagent l’ensemble de leur espacemémoire, ce qui réduit les coûts de création ou de destruction associés à ces threads par rapport àdes processus distincts, dits lourds.
Une autre manière de paralléliser une exécution est de partager des portions de mémoires entreprocessus indépendants, soit en recopiant les données d’un processus parent au moment de la créa-tion d’une processus fils (fork), soit en utilisant les primitives de mémoire partagée proposées parle système. Cette technique est souvent employée pour des services où un unique processus parentdemeure en attente de traitements à confier à un ou plusieurs processus fils. Ce fonctionnement estqualifié de maître-esclave.
La parallélisation en mémoire partagée n’implique par nécessairement la création de plusieursprocessus et peut également être réalisée au niveau de l’instruction. Dans ce cas, une même opéra-tion est appliquée à plusieurs données (SIMD) indiquées sous forme de vecteurs. Ces instructionssont pour cette raison dites vectorielles. Ce mode d’exécution est à la base de l’exécution sur GPU.
La parallélisation en mémoire partagée est le modèle de parallélisation le plus aisé à exploi-ter car il permet de conserver un seul espace mémoire pour toutes les tâches. Ce partage facilitel’adaptation d’un algorithme séquentiel avec un minimum de modifications, sans répartition par-ticulière des données. Comme pour toute ressource partagée, il devient cependant nécessaire degérer la cohérence des données mémoires puisque plusieurs tâches peuvent les modifier de ma-nière simultanée. Suivant le langage de programmation utilisé, cette synchronisation de l’accèsaux données peut être intégrée au niveau des structures de données fournies (structure de données"thread-safe") ou être de la responsabilité du développeur.
L’obligation de conserver toutes les ressources sur une même machine rend difficile l’utilisationde ce type de parallélisation au-delà de quelques dizaines de coeurs et d’une centaine de gigaoc-
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 30
tets de mémoire vive avec des processeurs traditionnels. Ces limites correspondent de plus à desmachines dédiées à ce type de parallélisation et sont donc en pratique beaucoup plus basses pourdes machines de bureau ou des ordinateurs portables.
CPU1
Mémoire du programme
Tâche 1
CPU2
Tâche 2
CPU3
Tâche 3
CPU4
Tâche 4
Figure 2.2 – Découpage d’une exécution en mémoire partagée
L’utilisation de la parallélisation en mémoire partagée est grandement facilitée par des biblio-thèques génériques telles que OpenMP, utilisé par de nombreuses simulations agents.
2.2.2 OpenMP, un modèle de programmation
OpenMP [CDK+01] est un modèle de programmation pour les langages C, C++ et Fortranpermettant le calcul parallèle en mémoire partagée. Il a été pour la première fois proposé en 1997.
La parallélisation offerte par ce modèle repose sur la création et l’exécution implicite de sec-tions parallèles d’un programme par un ensemble de threads, ou workers, alloués et gérés au-tomatiquement par OpenMP. Ces sections parallèles sont indiquées par le biais de directives depréprocesseur classées en instructions de contrôle d’exécution (boucles parallèles), en directivesde partage des données (privées, partagées), en outils de synchronisation permettant de coordonnerla progression de l’exécution des threads et en fonctions de gestion de l’environnement.
La possibilité d’annoter un code source existant facilite grandement l’utilisation d’OpenMPpour paralléliser de manière incrémentale un programme séquentiel. OpenMP permet égalementde configurer le nombre de coeurs d’exécution locaux à utiliser, pour mesurer aisément l’impactde la parallélisation sur les performances obtenues.

CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 31
2.3 Parallélisation en mémoire distribuée
Les ressources fournies par une seule machine ne suffisent pas toujours à atteindre les ob-jectifs en termes de temps d’exécution ou de mémoire requis par le programme. Dans ce cas, ildevient intéressant de pouvoir exploiter simultanément plusieurs machines. Cette parallélisationest souvent utilisée sur des grilles (machines hétérogènes reliées par un réseau informatique) oudes clusters (ensemble de noeuds de calculs homogènes, souvent reliés par un réseau informatiquehaute performance tel que Infiniband).
2.3.1 Modèle d’exécution
La parallélisation en mémoire distribuée requiert une distribution explicite des données entretâches d’exécution (Figure 2.3) de manière à permettre la répartition des tâches sur plusieurs ma-chines dotées de mémoire indépendantes. Cette distribution des données permet également des’affranchir des limitations en termes de taille mémoire imposées par une seule machine, en nestockant pour chaque unité de traitement que les données nécessaires à son exécution. Cette répar-tition implique cependant la copie de certaines données communes dont la modification doit êtreensuite répercutée dans les autres processus.
La parallélisation en mémoire partagée impose également des modifications en profondeur del’algorithme pour prendre en compte ce découpage mémoire, ce qui rend son utilisation pour unprogramme existant moins aisée que la parallélisation en mémoire partagée.
CPU1
MémoireTâche 1
Tâche 1
CPU2
Mémoire
Tâche 2
Tâche 2
CPU1
Mémoire
Tâche 1
Tâche 1
Réseau
CPU3
Mémoire
Tâche 3
Tâche 3
CPU4
Mémoire
Tâche 4
Tâche 4
Figure 2.3 – Découpage d’une exécution en mémoire distribuée
La parallélisation en mémoire partagée requiert une prise en compte explicite du découpage desdonnées par le concepteur du programme, mais peut elle aussi être facilitée au moyen de modèlesde programmation comme MPI, capables d’abstraire la localisation et les communications entresportions du programme.
2.3.2 Un modèle de programmation standard : MPI
MPI [Mes09] est une norme définissant un ensemble de fonctions de communication entreprocessus locaux ou distants. Des implémentations pour les langages C, C++ et Fortran en sont
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 32
disponibles sur de nombreuses plates-formes, ce qui en fait un standard pour la réalisation deparallélisations distribuées.
L’objectif de ces fonctions est de permettre de bonnes performances d’exécution aussi bien surune même machine qu’entre des machines distantes. MPI repose pour cela sur un ensemble deprimitives de communication de haut niveau susceptibles d’exploiter les mécanismes optimisésd’échange de données offerts par le système d’exploitation et le matériel.
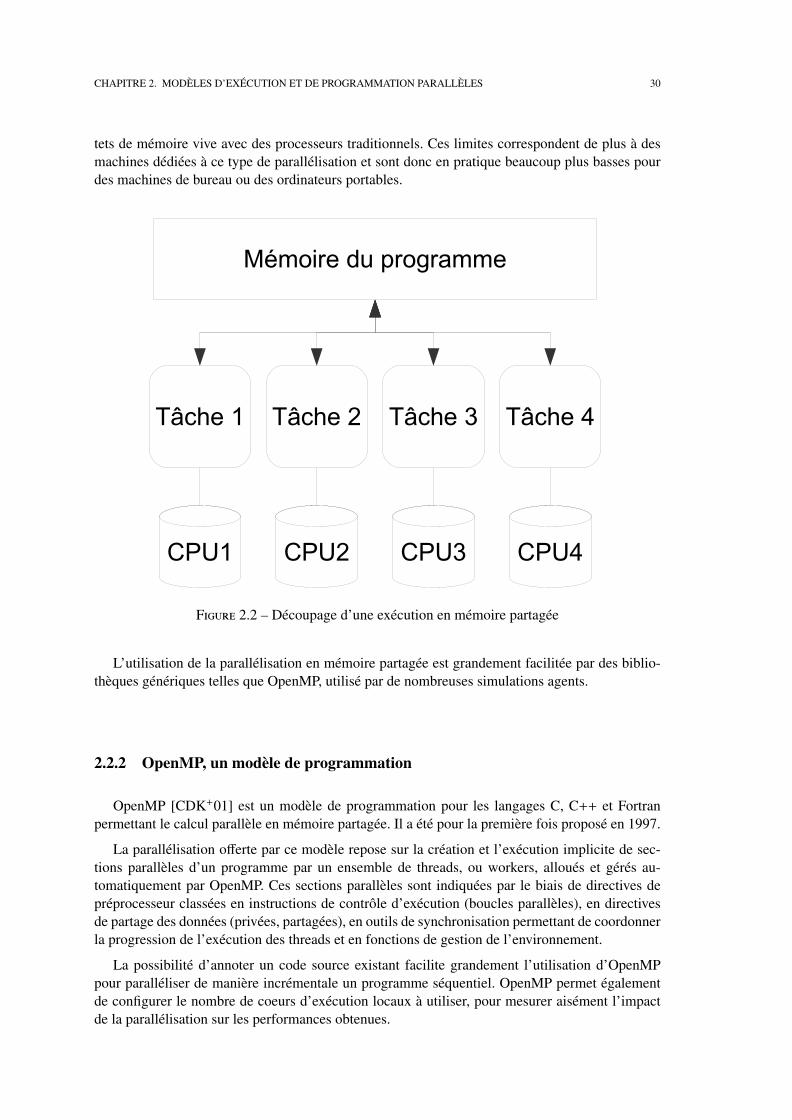
Une exécution MPI est constituée d’un ensemble de processus associés à des numéros de rangindépendants de leur localisation physique (Figure 2.4). Ces numéros de rang permettent à chaqueprocessus d’adapter ses traitements en fonction de son rôle dans le groupe, en se comportant parexemple en maître distribuant des tâches ou en esclave traitant ces calculs.
0 1
2
3
CPU1 CPU2
Nœud 1
CPU1 CPU2
Nœud 2
CPU1 CPU2
Nœud 3
MPI_COMM_WORLD
Rang de processus
Machines physiques
Figure 2.4 – Exemple d’association entre processus MPI et matériel physique
MPI propose deux catégories d’opérations de communications :
— Les opérations point-à-point : ces communications mettent en jeu un unique émetteur etdestinataire dans le groupe de processus.
— Les opérations de groupe, également qualifiées de collectives ou de multicast, impliquentla participation d’une partie ou de tous les processus MPI pour réaliser un même traitement.Un exemple de tel traitement commun est la diffusion d’une donnée en début de calcul, oula mise en commun de résultats partiels à la fin de l’exécution MPI.
La plupart de ces opérations de communication possèdent des variantes synchrones et asyn-chrones, de manière à faciliter la gestion du déroulement de l’exécution ou la poursuite de traite-ments en tâche de fond dans l’attente de communications.
La seconde version de MPI sortie en 1997 apporte la possibilité d’intégrer ou de créer dynami-quement des processus en cours d’exécution MPI. Elle permet également la gestion en parallèlede flux d’entrée/sortie vers des fichiers à l’aide des fonctions MPI-IO.
Les implémentations libres les plus connues du standard MPI sont MPICH 2 et OpenMPI 3. Acôté de ces implémentations généralistes, de nombreux constructeurs proposent des alternativesoptimisées pour leurs solutions logicielles et matérielles telles que IntelMPI pour les processeursIntel. Si le standard MPI officiel est dédié aux langages C et C++, des solutions équivalentes pourJava telles que MPJ Express [SMH+10] ou JACE [BDM04] existent également.
2. http ://www.mcs.anl.gov/project/mpich-high-performance-portable-implementation-mpi3. http ://www.open-mpi.org/
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 33
2.4 Parallélisation hybride
2.4.1 Modèle d’exécution
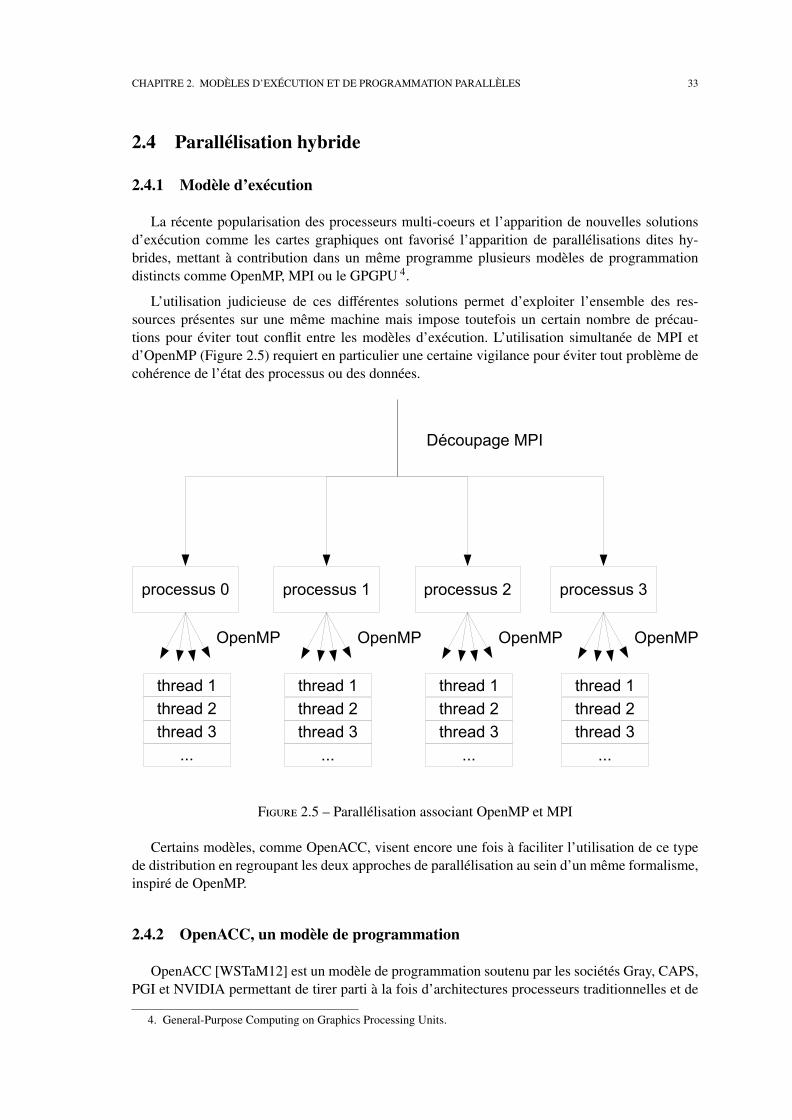
La récente popularisation des processeurs multi-coeurs et l’apparition de nouvelles solutionsd’exécution comme les cartes graphiques ont favorisé l’apparition de parallélisations dites hy-brides, mettant à contribution dans un même programme plusieurs modèles de programmationdistincts comme OpenMP, MPI ou le GPGPU 4.
L’utilisation judicieuse de ces différentes solutions permet d’exploiter l’ensemble des res-sources présentes sur une même machine mais impose toutefois un certain nombre de précau-tions pour éviter tout conflit entre les modèles d’exécution. L’utilisation simultanée de MPI etd’OpenMP (Figure 2.5) requiert en particulier une certaine vigilance pour éviter tout problème decohérence de l’état des processus ou des données.
processus 0
thread 1
thread 2
thread 3
...
OpenMP
processus 1
thread 1
thread 2
thread 3
...
OpenMP
processus 2
thread 1
thread 2
thread 3
...
OpenMP
processus 3
thread 1
thread 2
thread 3
...
OpenMP
Découpage MPI
Figure 2.5 – Parallélisation associant OpenMP et MPI
Certains modèles, comme OpenACC, visent encore une fois à faciliter l’utilisation de ce typede distribution en regroupant les deux approches de parallélisation au sein d’un même formalisme,inspiré de OpenMP.
2.4.2 OpenACC, un modèle de programmation
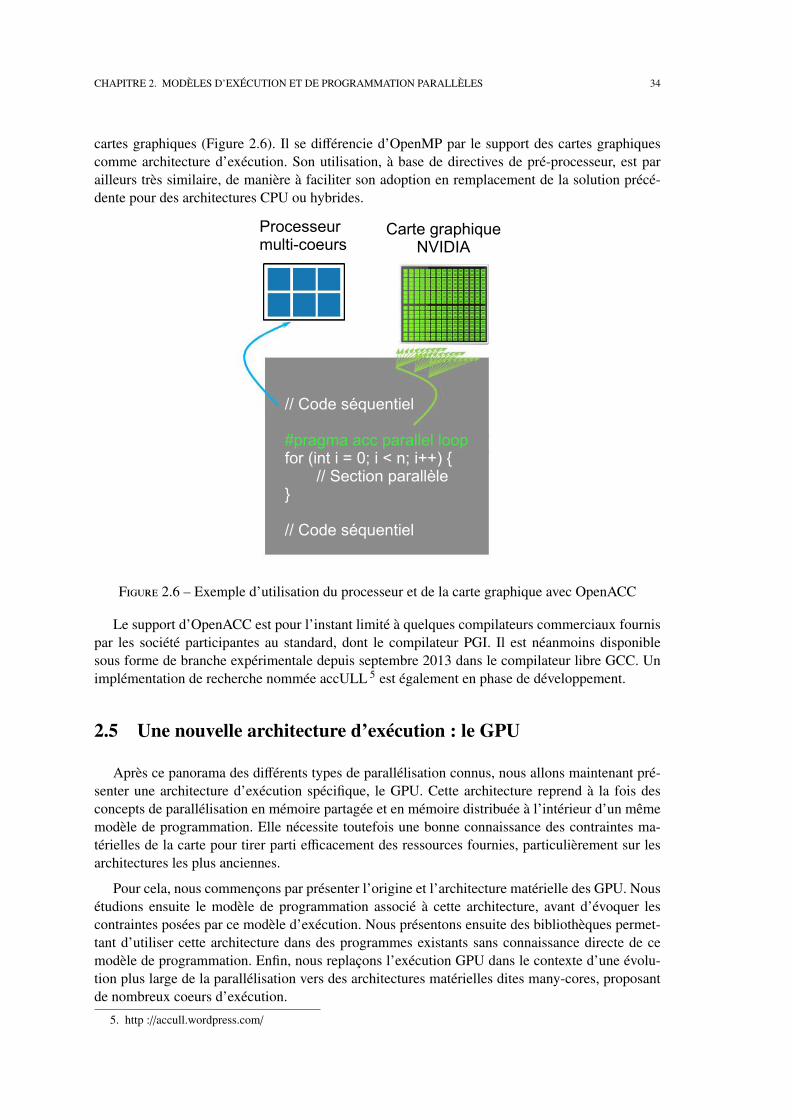
OpenACC [WSTaM12] est un modèle de programmation soutenu par les sociétés Gray, CAPS,PGI et NVIDIA permettant de tirer parti à la fois d’architectures processeurs traditionnelles et de
4. General-Purpose Computing on Graphics Processing Units.
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 34
cartes graphiques (Figure 2.6). Il se différencie d’OpenMP par le support des cartes graphiquescomme architecture d’exécution. Son utilisation, à base de directives de pré-processeur, est parailleurs très similaire, de manière à faciliter son adoption en remplacement de la solution précé-dente pour des architectures CPU ou hybrides.
// Code séquentiel
#pragma acc parallel loopfor (int i = 0; i < n; i++) {
// Section parallèle}
// Code séquentiel
Processeurmulti-coeurs
Carte graphiqueNVIDIA
Figure 2.6 – Exemple d’utilisation du processeur et de la carte graphique avec OpenACC
Le support d’OpenACC est pour l’instant limité à quelques compilateurs commerciaux fournispar les société participantes au standard, dont le compilateur PGI. Il est néanmoins disponiblesous forme de branche expérimentale depuis septembre 2013 dans le compilateur libre GCC. Unimplémentation de recherche nommée accULL 5 est également en phase de développement.
2.5 Une nouvelle architecture d’exécution : le GPU
Après ce panorama des différents types de parallélisation connus, nous allons maintenant pré-senter une architecture d’exécution spécifique, le GPU. Cette architecture reprend à la fois desconcepts de parallélisation en mémoire partagée et en mémoire distribuée à l’intérieur d’un mêmemodèle de programmation. Elle nécessite toutefois une bonne connaissance des contraintes ma-térielles de la carte pour tirer parti efficacement des ressources fournies, particulièrement sur lesarchitectures les plus anciennes.
Pour cela, nous commençons par présenter l’origine et l’architecture matérielle des GPU. Nousétudions ensuite le modèle de programmation associé à cette architecture, avant d’évoquer lescontraintes posées par ce modèle d’exécution. Nous présentons ensuite des bibliothèques permet-tant d’utiliser cette architecture dans des programmes existants sans connaissance directe de cemodèle de programmation. Enfin, nous replaçons l’exécution GPU dans le contexte d’une évolu-tion plus large de la parallélisation vers des architectures matérielles dites many-cores, proposantde nombreux coeurs d’exécution.
5. http ://accull.wordpress.com/
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 35
2.5.1 Genèse des GPU
Les cartes graphiques ou GPU 6 ont été à l’origine conçues pour décharger le CPU des calculscoûteux liés à l’introduction de rendus graphiques dans les programmes. Ces calculs, qu’il s’agissede compositions de texture ou de calculs dans l’espace, se caractérisent en effet par l’applicationvectorielle d’une même opération à d’importants volumes de données. En proposant plusieurs di-zaines ou centaines de coeurs d’exécution, le GPU permet d’appliquer ces traitements en parallèleet ainsi de réduire le temps total nécessaire pour effectuer ces opérations. Cette spécialisation per-met également de réduire la complexité de chaque coeur et ainsi d’en augmenter la densité sur unesurface donnée.
Au départ, les premières cartes graphiques ne déchargeaient le processeur que de certains trai-tements graphiques. L’augmentation de la résolution d’une part, et des attentes en qualité derendu graphique d’autre part, ont rapidement amené la délégation de plus en plus d’opérationsà ces cartes, jusqu’à l’apparition des premiers GPU programmables, c’est à dire capables d’exé-cuter des portions de programme. Ces possibilités de programmation, initialement très limitées,n’ont été accessibles dans un premier temps que par le biais de bibliothèques de rendu graphiquecomme OpenGL et DirectX. Elles ont été pour la première fois pleinement accessibles au déve-loppeur en 2008, avec la GeForce 8, par le biais du modèle de programmation CUDA. Le mo-dèle OpenCL [Khr08] apparaît également la même année et permet l’utilisation des matériels gra-phiques d’autres fabriquants, notamment Intel et AMD, ainsi que l’exécution sur processeur tradi-tionnel par le biais de OpenMP. Un autre modèle de programmation GPU, DirectCompute [Joh12],a depuis été proposé par Microsoft dans sa bibliothèque DirectX pour les systèmes d’exploitationWindows.
2.5.2 Architecture matérielle
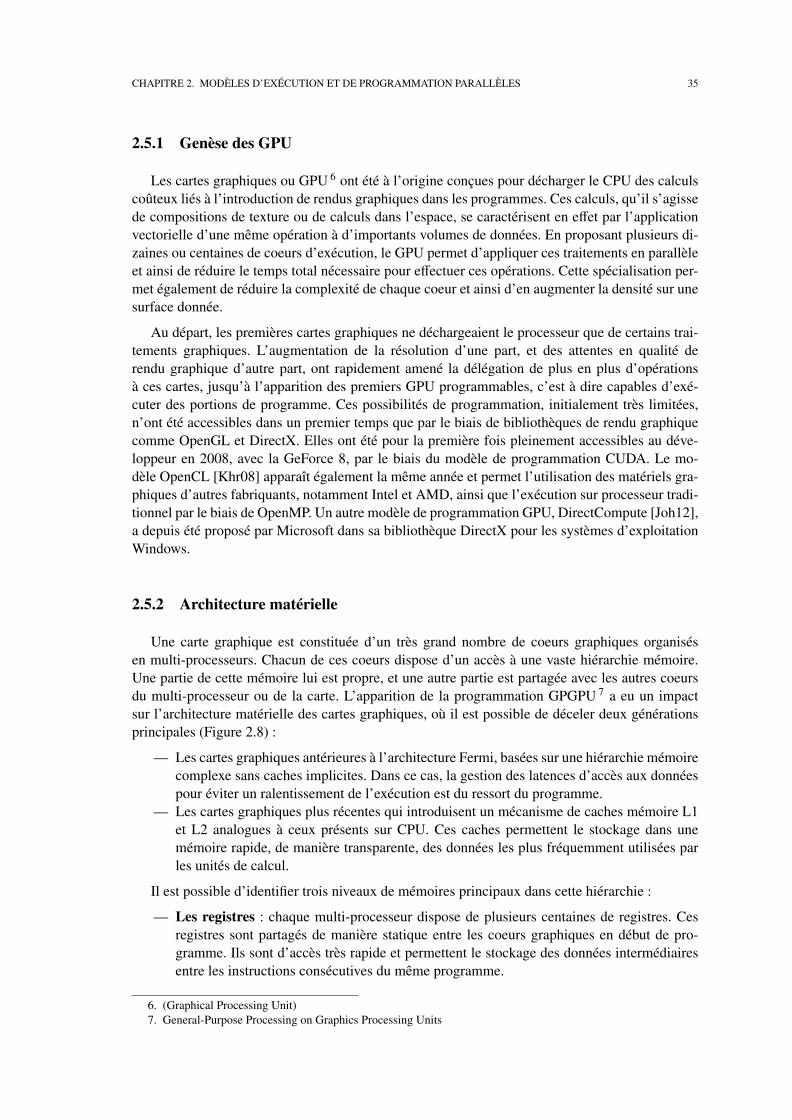
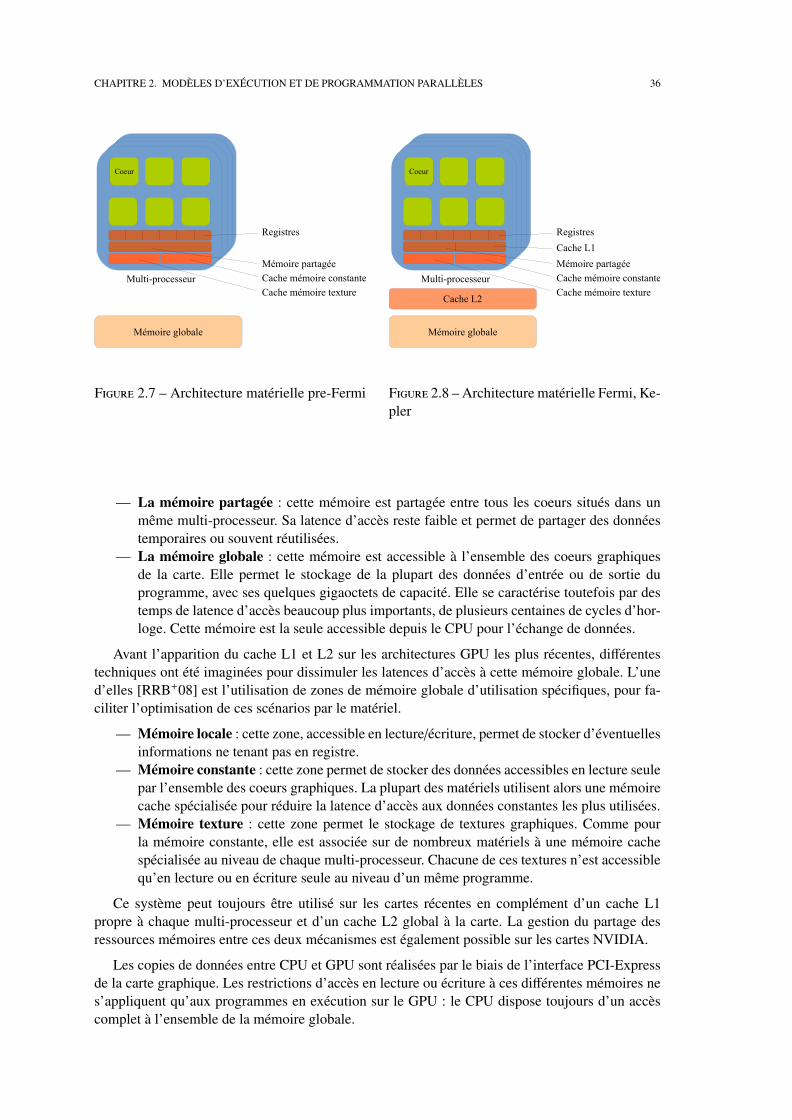
Une carte graphique est constituée d’un très grand nombre de coeurs graphiques organisésen multi-processeurs. Chacun de ces coeurs dispose d’un accès à une vaste hiérarchie mémoire.Une partie de cette mémoire lui est propre, et une autre partie est partagée avec les autres coeursdu multi-processeur ou de la carte. L’apparition de la programmation GPGPU 7 a eu un impactsur l’architecture matérielle des cartes graphiques, où il est possible de déceler deux générationsprincipales (Figure 2.8) :
— Les cartes graphiques antérieures à l’architecture Fermi, basées sur une hiérarchie mémoirecomplexe sans caches implicites. Dans ce cas, la gestion des latences d’accès aux donnéespour éviter un ralentissement de l’exécution est du ressort du programme.
— Les cartes graphiques plus récentes qui introduisent un mécanisme de caches mémoire L1et L2 analogues à ceux présents sur CPU. Ces caches permettent le stockage dans unemémoire rapide, de manière transparente, des données les plus fréquemment utilisées parles unités de calcul.
Il est possible d’identifier trois niveaux de mémoires principaux dans cette hiérarchie :
— Les registres : chaque multi-processeur dispose de plusieurs centaines de registres. Cesregistres sont partagés de manière statique entre les coeurs graphiques en début de pro-gramme. Ils sont d’accès très rapide et permettent le stockage des données intermédiairesentre les instructions consécutives du même programme.
6. (Graphical Processing Unit)7. General-Purpose Processing on Graphics Processing Units
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 36
Coeur
Mémoire globale
Multi-processeur
Registres
Mémoire partagée
Cache mémoire constante
Cache mémoire texture
Figure 2.7 – Architecture matérielle pre-Fermi
Coeur
Mémoire globale
Multi-processeur
Cache L2
Registres
Cache L1
Mémoire partagée
Cache mémoire constante
Cache mémoire texture
Figure 2.8 – Architecture matérielle Fermi, Ke-pler
— La mémoire partagée : cette mémoire est partagée entre tous les coeurs situés dans unmême multi-processeur. Sa latence d’accès reste faible et permet de partager des donnéestemporaires ou souvent réutilisées.
— La mémoire globale : cette mémoire est accessible à l’ensemble des coeurs graphiquesde la carte. Elle permet le stockage de la plupart des données d’entrée ou de sortie duprogramme, avec ses quelques gigaoctets de capacité. Elle se caractérise toutefois par destemps de latence d’accès beaucoup plus importants, de plusieurs centaines de cycles d’hor-loge. Cette mémoire est la seule accessible depuis le CPU pour l’échange de données.
Avant l’apparition du cache L1 et L2 sur les architectures GPU les plus récentes, différentestechniques ont été imaginées pour dissimuler les latences d’accès à cette mémoire globale. L’uned’elles [RRB+08] est l’utilisation de zones de mémoire globale d’utilisation spécifiques, pour fa-ciliter l’optimisation de ces scénarios par le matériel.
— Mémoire locale : cette zone, accessible en lecture/écriture, permet de stocker d’éventuellesinformations ne tenant pas en registre.
— Mémoire constante : cette zone permet de stocker des données accessibles en lecture seulepar l’ensemble des coeurs graphiques. La plupart des matériels utilisent alors une mémoirecache spécialisée pour réduire la latence d’accès aux données constantes les plus utilisées.
— Mémoire texture : cette zone permet le stockage de textures graphiques. Comme pourla mémoire constante, elle est associée sur de nombreux matériels à une mémoire cachespécialisée au niveau de chaque multi-processeur. Chacune de ces textures n’est accessiblequ’en lecture ou en écriture seule au niveau d’un même programme.
Ce système peut toujours être utilisé sur les cartes récentes en complément d’un cache L1propre à chaque multi-processeur et d’un cache L2 global à la carte. La gestion du partage desressources mémoires entre ces deux mécanismes est également possible sur les cartes NVIDIA.
Les copies de données entre CPU et GPU sont réalisées par le biais de l’interface PCI-Expressde la carte graphique. Les restrictions d’accès en lecture ou écriture à ces différentes mémoires nes’appliquent qu’aux programmes en exécution sur le GPU : le CPU dispose toujours d’un accèscomplet à l’ensemble de la mémoire globale.
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 37
2.5.3 Modèle de programmation
Le modèle de programmation GPU se caractérise par l’utilisation la plus large possible dudécoupage en threads en remplacement des boucles présentes dans l’algorithme. Cette démarchede parallélisation fine se justifie par les coûts d’exécution différents rencontrés sur CPU et surGPU.
Un processeur traditionnel est conçu pour traiter un nombre limité de processus s’exécutant surune longue durée à l’échelle du matériel : secondes, minutes, heures. La création et la destructionde processus est ainsi un traitement coûteux, car elle requiert l’allocation ou la libération d’un en-vironnement mémoire et système complet. Les threads, ou processus légers, permettent de réaliserdes traitements ponctuels en évitant cette allocation d’environnement, comme évoqué dans notresection sur la parallélisation en mémoire partagée.
Au contraire, un GPU est conçu pour permettre l’application d’un petit nombre d’opérationssur de grands volumes de données. Ce type d’exécution se caractérise par des tâches brèves etremplacées très fréquemment de manière à assurer le remplissage des centaines de coeurs pro-posés par l’architecture. Les latences mémoires, importantes en regard du temps de traitement dechaque tâche, encouragent également la ré-allocation des ressources matérielles de calculs bloquésen attente d’opérations mémoire à d’autres traitements. Dans ces circonstances, l’utilisation denombres très importants de threads permet à l’ordonnanceur GPU de disposer d’un grand nombrede candidats pour optimiser le remplissage des ressources d’exécution fournies par la carte. Cescandidats sont regroupés en warp, ou paquet d’exécution, au moment de leur attribution à unmulti-processeur matériel particulier.
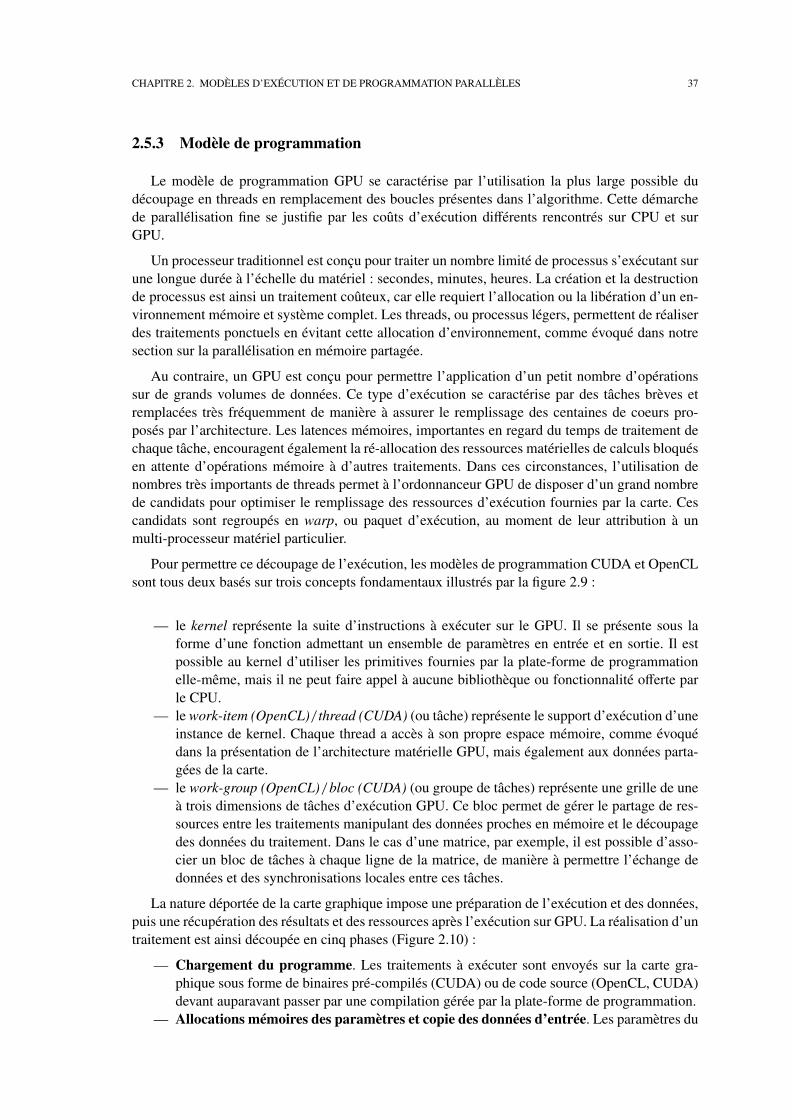
Pour permettre ce découpage de l’exécution, les modèles de programmation CUDA et OpenCLsont tous deux basés sur trois concepts fondamentaux illustrés par la figure 2.9 :
— le kernel représente la suite d’instructions à exécuter sur le GPU. Il se présente sous laforme d’une fonction admettant un ensemble de paramètres en entrée et en sortie. Il estpossible au kernel d’utiliser les primitives fournies par la plate-forme de programmationelle-même, mais il ne peut faire appel à aucune bibliothèque ou fonctionnalité offerte parle CPU.
— le work-item (OpenCL) / thread (CUDA) (ou tâche) représente le support d’exécution d’uneinstance de kernel. Chaque thread a accès à son propre espace mémoire, comme évoquédans la présentation de l’architecture matérielle GPU, mais également aux données parta-gées de la carte.
— le work-group (OpenCL) / bloc (CUDA) (ou groupe de tâches) représente une grille de uneà trois dimensions de tâches d’exécution GPU. Ce bloc permet de gérer le partage de res-sources entre les traitements manipulant des données proches en mémoire et le découpagedes données du traitement. Dans le cas d’une matrice, par exemple, il est possible d’asso-cier un bloc de tâches à chaque ligne de la matrice, de manière à permettre l’échange dedonnées et des synchronisations locales entre ces tâches.
La nature déportée de la carte graphique impose une préparation de l’exécution et des données,puis une récupération des résultats et des ressources après l’exécution sur GPU. La réalisation d’untraitement est ainsi découpée en cinq phases (Figure 2.10) :
— Chargement du programme. Les traitements à exécuter sont envoyés sur la carte gra-phique sous forme de binaires pré-compilés (CUDA) ou de code source (OpenCL, CUDA)devant auparavant passer par une compilation gérée par la plate-forme de programmation.
— Allocations mémoires des paramètres et copie des données d’entrée. Les paramètres du
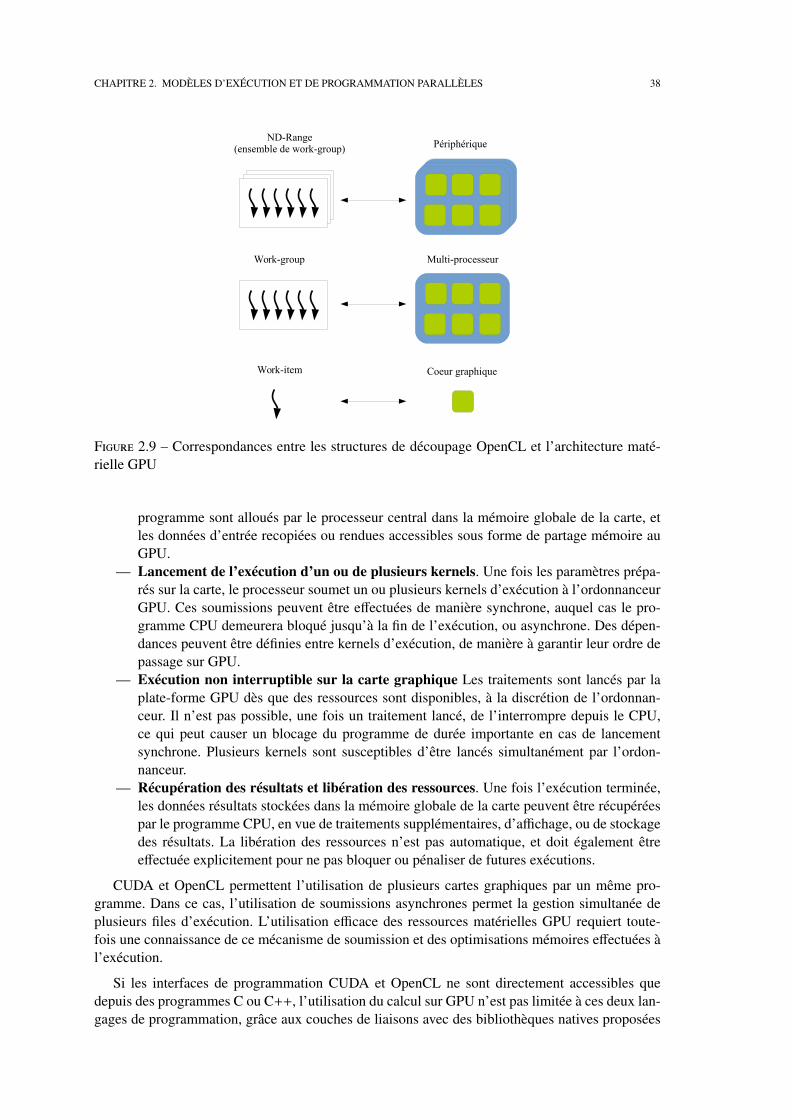
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 38
ND-Range(ensemble de work-group)
Périphérique
Work-group Multi-processeur
Coeur graphiqueWork-item
Figure 2.9 – Correspondances entre les structures de découpage OpenCL et l’architecture maté-rielle GPU
programme sont alloués par le processeur central dans la mémoire globale de la carte, etles données d’entrée recopiées ou rendues accessibles sous forme de partage mémoire auGPU.
— Lancement de l’exécution d’un ou de plusieurs kernels. Une fois les paramètres prépa-rés sur la carte, le processeur soumet un ou plusieurs kernels d’exécution à l’ordonnanceurGPU. Ces soumissions peuvent être effectuées de manière synchrone, auquel cas le pro-gramme CPU demeurera bloqué jusqu’à la fin de l’exécution, ou asynchrone. Des dépen-dances peuvent être définies entre kernels d’exécution, de manière à garantir leur ordre depassage sur GPU.
— Exécution non interruptible sur la carte graphique Les traitements sont lancés par laplate-forme GPU dès que des ressources sont disponibles, à la discrétion de l’ordonnan-ceur. Il n’est pas possible, une fois un traitement lancé, de l’interrompre depuis le CPU,ce qui peut causer un blocage du programme de durée importante en cas de lancementsynchrone. Plusieurs kernels sont susceptibles d’être lancés simultanément par l’ordon-nanceur.
— Récupération des résultats et libération des ressources. Une fois l’exécution terminée,les données résultats stockées dans la mémoire globale de la carte peuvent être récupéréespar le programme CPU, en vue de traitements supplémentaires, d’affichage, ou de stockagedes résultats. La libération des ressources n’est pas automatique, et doit également êtreeffectuée explicitement pour ne pas bloquer ou pénaliser de futures exécutions.
CUDA et OpenCL permettent l’utilisation de plusieurs cartes graphiques par un même pro-gramme. Dans ce cas, l’utilisation de soumissions asynchrones permet la gestion simultanée deplusieurs files d’exécution. L’utilisation efficace des ressources matérielles GPU requiert toute-fois une connaissance de ce mécanisme de soumission et des optimisations mémoires effectuées àl’exécution.
Si les interfaces de programmation CUDA et OpenCL ne sont directement accessibles quedepuis des programmes C ou C++, l’utilisation du calcul sur GPU n’est pas limitée à ces deux lan-gages de programmation, grâce aux couches de liaisons avec des bibliothèques natives proposées
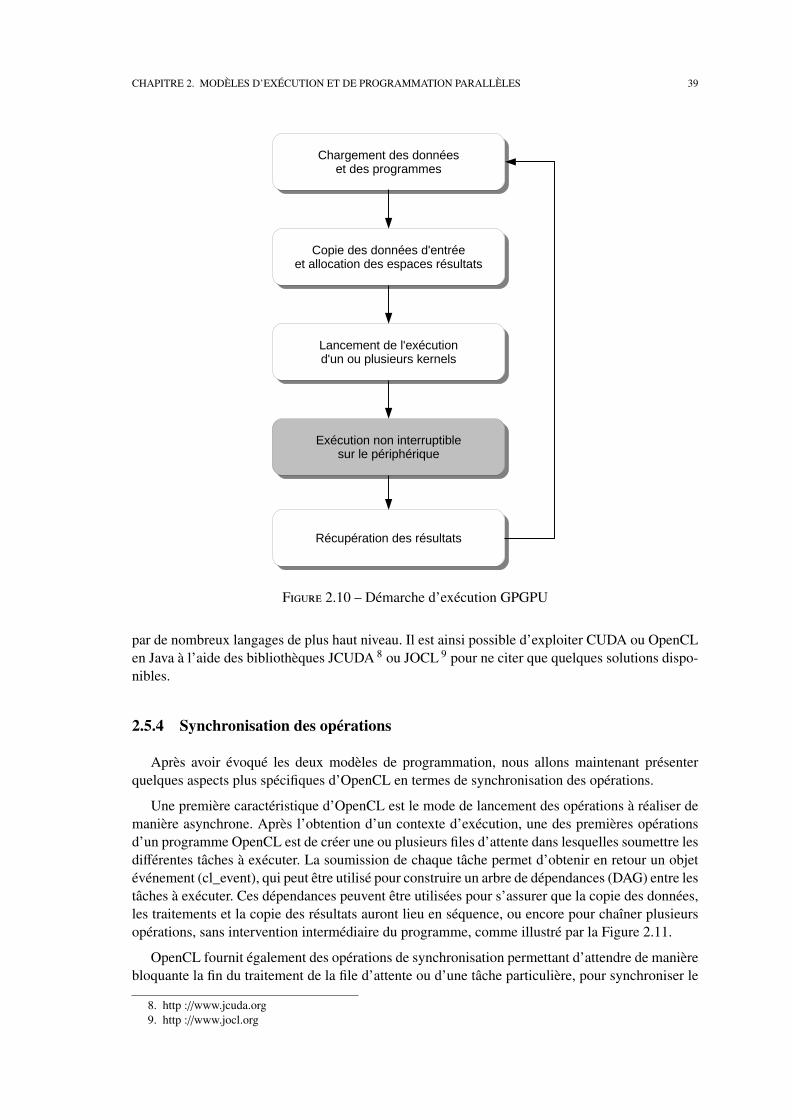
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 39
Chargement des donnéeset des programmes
Chargement des donnéeset des programmes
Copie des données d'entréeet allocation des espaces résultats
Copie des données d'entréeet allocation des espaces résultats
Lancement de l'exécutiond'un ou plusieurs kernels
Lancement de l'exécutiond'un ou plusieurs kernels
Exécution non interruptiblesur le périphérique
Exécution non interruptiblesur le périphérique
Récupération des résultatsRécupération des résultats
Figure 2.10 – Démarche d’exécution GPGPU
par de nombreux langages de plus haut niveau. Il est ainsi possible d’exploiter CUDA ou OpenCLen Java à l’aide des bibliothèques JCUDA 8 ou JOCL 9 pour ne citer que quelques solutions dispo-nibles.
2.5.4 Synchronisation des opérations
Après avoir évoqué les deux modèles de programmation, nous allons maintenant présenterquelques aspects plus spécifiques d’OpenCL en termes de synchronisation des opérations.
Une première caractéristique d’OpenCL est le mode de lancement des opérations à réaliser demanière asynchrone. Après l’obtention d’un contexte d’exécution, une des premières opérationsd’un programme OpenCL est de créer une ou plusieurs files d’attente dans lesquelles soumettre lesdifférentes tâches à exécuter. La soumission de chaque tâche permet d’obtenir en retour un objetévénement (cl_event), qui peut être utilisé pour construire un arbre de dépendances (DAG) entre lestâches à exécuter. Ces dépendances peuvent être utilisées pour s’assurer que la copie des données,les traitements et la copie des résultats auront lieu en séquence, ou encore pour chaîner plusieursopérations, sans intervention intermédiaire du programme, comme illustré par la Figure 2.11.
OpenCL fournit également des opérations de synchronisation permettant d’attendre de manièrebloquante la fin du traitement de la file d’attente ou d’une tâche particulière, pour synchroniser le
8. http ://www.jcuda.org9. http ://www.jocl.org
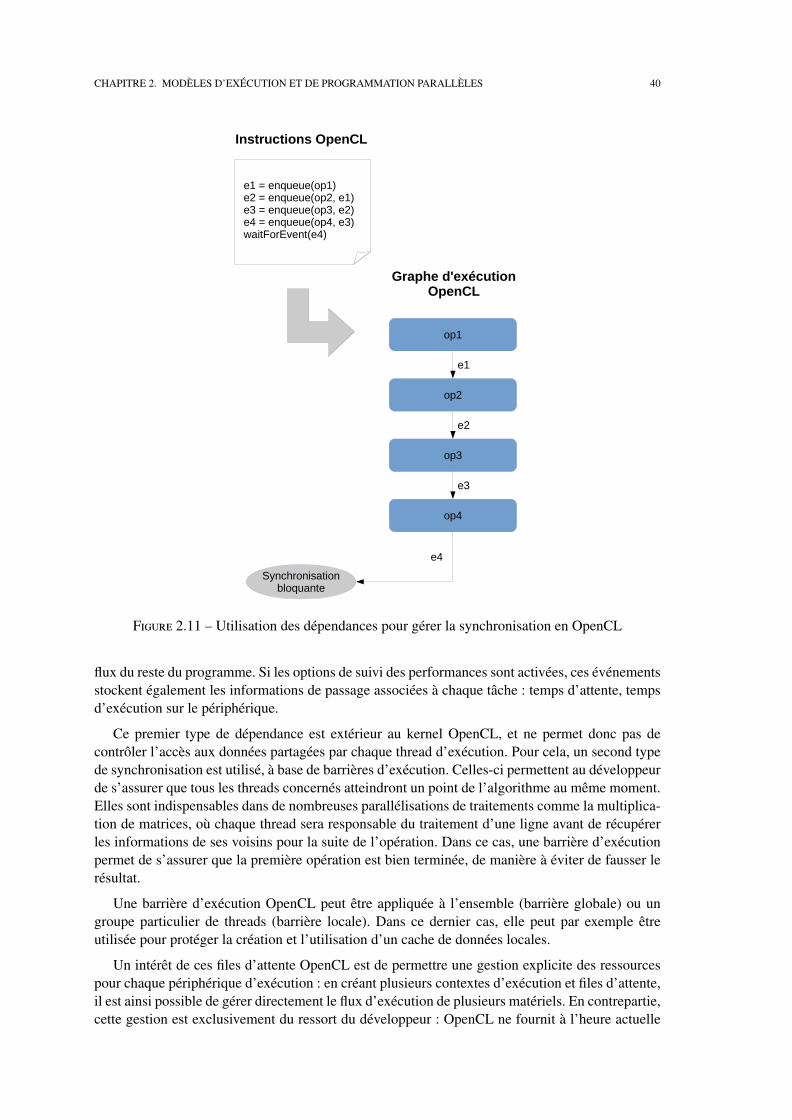
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 40
op1
op2
op3
op4
e1 = enqueue(op1)e2 = enqueue(op2, e1)e3 = enqueue(op3, e2)e4 = enqueue(op4, e3)waitForEvent(e4)
e1
e2
e3
Instructions OpenCL
Graphe d'exécutionOpenCL
Synchronisationbloquante
e4
Figure 2.11 – Utilisation des dépendances pour gérer la synchronisation en OpenCL
flux du reste du programme. Si les options de suivi des performances sont activées, ces événementsstockent également les informations de passage associées à chaque tâche : temps d’attente, tempsd’exécution sur le périphérique.
Ce premier type de dépendance est extérieur au kernel OpenCL, et ne permet donc pas decontrôler l’accès aux données partagées par chaque thread d’exécution. Pour cela, un second typede synchronisation est utilisé, à base de barrières d’exécution. Celles-ci permettent au développeurde s’assurer que tous les threads concernés atteindront un point de l’algorithme au même moment.Elles sont indispensables dans de nombreuses parallélisations de traitements comme la multiplica-tion de matrices, où chaque thread sera responsable du traitement d’une ligne avant de récupérerles informations de ses voisins pour la suite de l’opération. Dans ce cas, une barrière d’exécutionpermet de s’assurer que la première opération est bien terminée, de manière à éviter de fausser lerésultat.
Une barrière d’exécution OpenCL peut être appliquée à l’ensemble (barrière globale) ou ungroupe particulier de threads (barrière locale). Dans ce dernier cas, elle peut par exemple êtreutilisée pour protéger la création et l’utilisation d’un cache de données locales.
Un intérêt de ces files d’attente OpenCL est de permettre une gestion explicite des ressourcespour chaque périphérique d’exécution : en créant plusieurs contextes d’exécution et files d’attente,il est ainsi possible de gérer directement le flux d’exécution de plusieurs matériels. En contrepartie,cette gestion est exclusivement du ressort du développeur : OpenCL ne fournit à l’heure actuelle
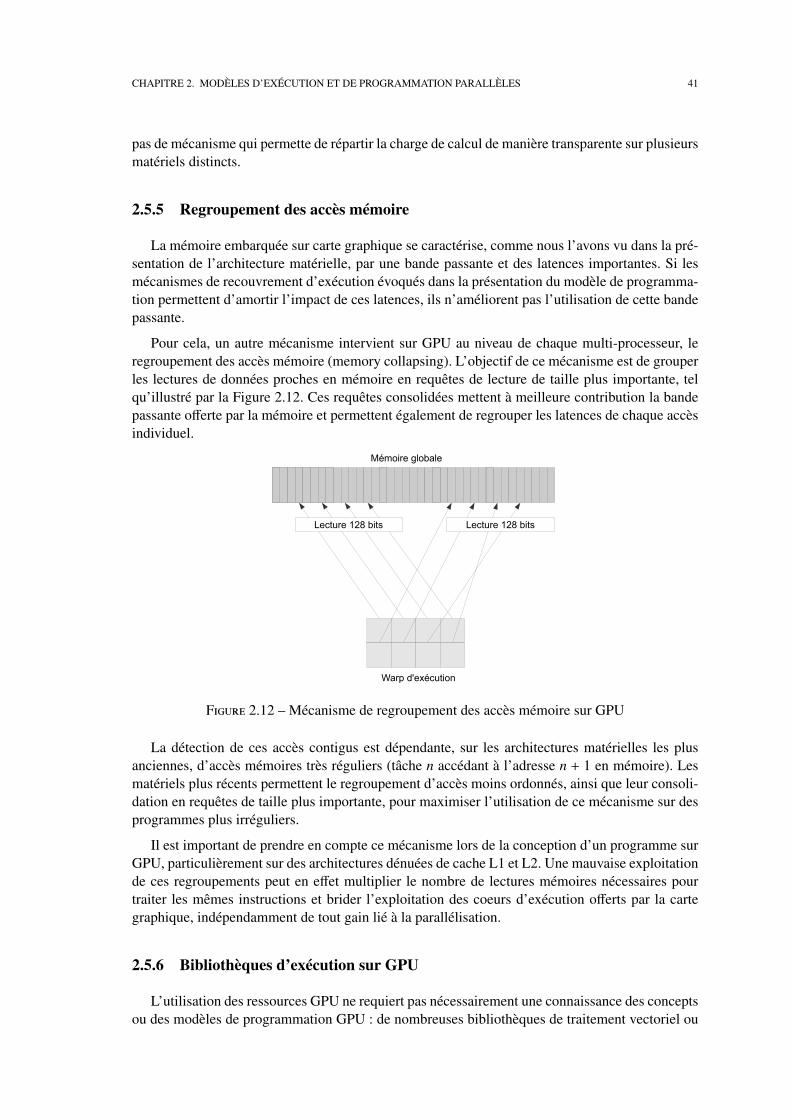
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 41
pas de mécanisme qui permette de répartir la charge de calcul de manière transparente sur plusieursmatériels distincts.
2.5.5 Regroupement des accès mémoire
La mémoire embarquée sur carte graphique se caractérise, comme nous l’avons vu dans la pré-sentation de l’architecture matérielle, par une bande passante et des latences importantes. Si lesmécanismes de recouvrement d’exécution évoqués dans la présentation du modèle de programma-tion permettent d’amortir l’impact de ces latences, ils n’améliorent pas l’utilisation de cette bandepassante.
Pour cela, un autre mécanisme intervient sur GPU au niveau de chaque multi-processeur, leregroupement des accès mémoire (memory collapsing). L’objectif de ce mécanisme est de grouperles lectures de données proches en mémoire en requêtes de lecture de taille plus importante, telqu’illustré par la Figure 2.12. Ces requêtes consolidées mettent à meilleure contribution la bandepassante offerte par la mémoire et permettent également de regrouper les latences de chaque accèsindividuel.
Lecture 128 bits Lecture 128 bits
Mémoire globale
Warp d'exécution
Figure 2.12 – Mécanisme de regroupement des accès mémoire sur GPU
La détection de ces accès contigus est dépendante, sur les architectures matérielles les plusanciennes, d’accès mémoires très réguliers (tâche n accédant à l’adresse n + 1 en mémoire). Lesmatériels plus récents permettent le regroupement d’accès moins ordonnés, ainsi que leur consoli-dation en requêtes de taille plus importante, pour maximiser l’utilisation de ce mécanisme sur desprogrammes plus irréguliers.
Il est important de prendre en compte ce mécanisme lors de la conception d’un programme surGPU, particulièrement sur des architectures dénuées de cache L1 et L2. Une mauvaise exploitationde ces regroupements peut en effet multiplier le nombre de lectures mémoires nécessaires pourtraiter les mêmes instructions et brider l’exploitation des coeurs d’exécution offerts par la cartegraphique, indépendamment de tout gain lié à la parallélisation.
2.5.6 Bibliothèques d’exécution sur GPU
L’utilisation des ressources GPU ne requiert pas nécessairement une connaissance des conceptsou des modèles de programmation GPU : de nombreuses bibliothèques de traitement vectoriel ou
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 42
matriciel traditionnellement utilisées sur CPU sont maintenant disponibles pour cette architecture.Ces bibliothèques fournissent souvent une interface de programmation similaire à leur équivalentCPU, de manière à faciliter leur utilisation dans un programme parallélisé existant.
Voici quelques exemples de bibliothèques de ce type basées sur CUDA :
— cuBLAS est une implémentation du standard d’algèbre linéaire BLAS. Certaines opéra-tions deviennent ainsi 6x à 17x plus rapides que leur équivalent CPU. Cette bibliothèquefait partie des bibliothèques optimisées GPU fournies par la société NVIDIA 10.
— cuFFT, pour CUDA Fast Fourier Transform library, permet le calcul de transformées ra-pides de Fourrier sur GPU. Cette bibliothèque est également fournie par la société NVI-DIA.
— CUSP (C++ Templated Sparse Matrix Library) est une bibliothèque d’algèbre linéaireà faible densité. Elle permet également la manipulation et le traitement de graphes. Sonutilisation repose sur le mécanisme des templates C++ pour permettre la génération decode GPU parallélisé en fonction des traitements demandés par l’utilisateur.
— cuSparse est une bibliothèque de traitements matriciels fournie par NVIDIA. Les formatsde représentations de matrice creuses les plus courants (COO, CSR, CSC, ELL/HYB) etleur manipulation sont gérés de manière native en CUDA.
Si de nombreuses bibliothèques utilisent le modèle de programmation CUDA, des alternativesbasées sur OpenCL existent également :
— clMath (anciennement AMD APPML) [amd] recouvre à la fois les opérations proposéespar BLAS et le traitement des transformées de Fourrier. L’utilisation de cette bibliothèqueest souvent combinée à cette de clMAGMA [CDD+13], qui fournit de nombreux solveurslinéaires et solutions de factorisation, réduction ou transformation de matrices.
— clpp [clp] est un autre projet fournissant des primitives de traitement en parallèle de struc-tures de données. Ces traitements incluent notamment la recherche par préfixe (“scan”), letri, ou la réduction de valeurs, de manière à faciliter la parallélisation de traitements pluscomplexes sur des structures telles que des graphes ou des arbres.
— VexCL [Dem] facilite également le traitement de matrices et de vecteurs en OpenCL. Cettebibliothèque est plus particulièrement orientée vers la réduction de la quantité de code né-cessaire à la préparation et à la gestion des traitements sur GPU, au moyen de l’architectureobjet C++.
Certaines bibliothèques supportent plusieurs plates-formes d’exécution comme OpenCL,CUDA ou OpenMP avec une même interface de programmation. C’est notamment le casd’OpenCV [Bra00], pour la manipulation d’images en temps réel, ou ViennaCL [RWR10], pour larésolution de problèmes d’algèbre linéaire. Des comparaisons de l’utilisation et des performancesde VexCL et ViennaCL sont disponibles dans la littérature [DARG12].
Une bibliothèque logicielle particulièrement intéressante est SnuCL [KSL+12]. Cette solutionpropose des opérations parallèles similaires à MPI pouvant être utilisées de manière transparentesur des clusters de CPU ou de GPU. Ces opérations permettent au concepteur de totalement sedétacher de la plate-forme d’exécution, mais reste toutefois réservée pour l’instant aux langages Cet C++.
10. https://developer.nvidia.com/gpu-accelerated-libraries
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 43
2.5.7 Optimisation de la soumission de tâches sur GPU
La possibilité de soumettre des tâches de manière asynchrone et de définir des dépendancesentre ces tâches rapproche l’utilisation efficace du GPU des problématiques d’ordonnancementprésentes dans la littérature.
Dans [TPO10], les auteurs analysent ainsi l’impact de différentes stratégies d’ordonnancementsur le temps nécessaire pour traiter un lot de tâches irrégulières. Pour cela, les traitements à réalisersont groupées en kernels de manière dynamique, plutôt que directement soumises sur la plate-forme, pour optimiser l’occupation des ressources.
Plutôt que d’intervenir sur le regroupement des traitements, d’autres études reposent sur l’uti-lisation de l’historique d’exécution pour optimiser le passage des tâches sur GPU. Les auteurs de[ATN09] proposent ainsi un ordonnancement basé sur la mémorisation du temps d’exécution destâches sur plusieurs architectures distinctes. De cette manière, les prochaines tâches peuvent alorsêtre soumises sur la plate-forme permettant la terminaison la plus rapide. Les résultats obtenus sonttrès intéressants, mais très dépendants de cette prévisibilité pour assurer un bon remplissage desressources. L’utilisation du processeur en parallèle du GPU permet de gagner 30% en performancepar rapport à l’utilisation du seul GPU dans un autre article [GBHS11]. L’utilisation de l’historiquedans cet article permet également d’assurer un remplissage à 80% des ressources, malgré la fortedisparité en performance entre matériel CPU et GPU.
Les auteurs de [MGR+11] étudient également l’impact de la décomposition des traite-ments en un ou plusieurs kernels sur l’ordonnancement OpenCL à l’aide de la plate-formeSURF [BETVG08] adaptée à instrumentalisation de traitements d’images. Les mesures effectuéesillustrent l’impact du nombre, de la durée et de la dimension de chaque kernel sur les performancesobtenues. L’interface de soumissions asynchrone proposée par OpenCL est utilisée pour gérer fi-nement les dépendances entre chaque kernel et obtenir les informations de temps précises de débutet fin des traitements. La mesure du décalage entre temps de soumission et temps de lancement dukernel permet de déterminer le moment le plus pertinent pour lancer les prochaines requêtes, demanière à ne pas pénaliser l’exécution.
Un défi de l’optimisation du passage de tâches sur GPU est l’absence de contrôle sur l’ordon-nanceur lui-même. Si certains articles [NSL+11] suggèrent des améliorations possibles en termesd’exécution des warps pour une meilleure occupation des ressources des coeurs d’exécution, il estdifficile de savoir si ces améliorations sont ou seront reprises dans les implémentations CUDA ouOpenCL existantes. La mesure des performances est donc un outil indispensable pour guider l’op-timisation de l’exécution sur GPU, même en présence d’outils proposés par des sociétés commeNVIDIA permettant de déterminer à priori les ressources utilisées par un programme GPU donné.
2.5.8 Bonnes pratiques de programmation sur GPU
Au vu de ces éléments sur l’architecture d’exécution GPU, de nombreux ensembles de recom-mandations existent sur la bonne manière de programmer sur GPU pour obtenir un programmeefficace [cud09, Cor12, AG13].
Ces recommandations s’articulent autour de quatre objectifs principaux :
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 44
Minimisation des coûts de transferts
Cette minimisation peut être effectuée à deux niveaux, soit en réduisant le nombre de transfertseffectués, soit en regroupant ces transferts.
La réduction du nombre de transferts n’est pas toujours possible, chaque donnée utilisée sur lepériphérique devant être explicitement copiée avant son utilisation. Elle peut toutefois être obtenueen réduisant la fréquence de synchronisation de la valeur de cette donnée entre CPU et GPU, ouen augmentant le temps passé sur le périphérique entre chaque retour sur le CPU.
Le regroupement est un autre moyen de minimiser le temps total des transferts, en utilisant labande passante importante fournie par l’interface PCI-Express pour mettre en commun plusieurscopies de données. Cette mise en commun est facilitée par les mécanismes de copies asynchroneproposés par les modèles de programmation GPU.
Optimisation des accès mémoires
L’optimisation des accès mémoires correspond à deux problématiques distinctes sur GPU : laminimisation des latences d’accès et la maximisation de l’utilisation de la bande passante mémoire.
La minimisation des latences d’accès est possible au moyen des mémoires spécifiques(constantes, globales, locales) proposées par l’architecture matérielle. L’utilisation de la mémoirepartagée permet également d’éviter de récupérer à plusieurs reprises des données fréquemmentutilisées par chaque traitement.
La maximisation de l’utilisation de la bande passante mémoire est dépendante du mécanisme deregroupement des accès mémoires de l’ordonnanceur et du l’ordre et de la proximité des donnéesaccédées en mémoire. Pour faciliter ce regroupement, il est recommandé d’utiliser les structuresde données les plus régulières possibles sur GPU.
Maximisation de l’occupation
Un dernier point essentiel pour l’obtention de bonnes performances sur GPU est d’utiliserle plus efficacement possible les nombreux coeurs d’exécution offerts par l’architecture. Cetteoccupation dépend de trois paramètres :
Les ressources consommées par chaque thread. Chaque multi-processeur ne dispose que d’unnombre limité de registres, partagés de manière statique au lancement du programme. L’utilisationd’un trop grand nombre de registres par threads est susceptible d’empêcher l’utilisation de tous lescoeurs d’exécution disponibles.
Le nombre de conditions présentes dans l’algorithme. Du fait des limitations en termes debranchements de l’architecture, l’utilisation de conditions impose l’évaluation des deux branchespar le matériel, pour ne conserver ensuite que les résultats de la branche effectivement retenue.L’utilisation de nombreuses branches est alors susceptible de cause une réduction important del’occupation des coeurs d’exécution.
Le nombre de threads total lancé. Comme évoqué précédemment, l’ordonnanceur d’exécutionGPU est capable de dissimuler des latences d’exécution en attribuant automatiquement plusieurs
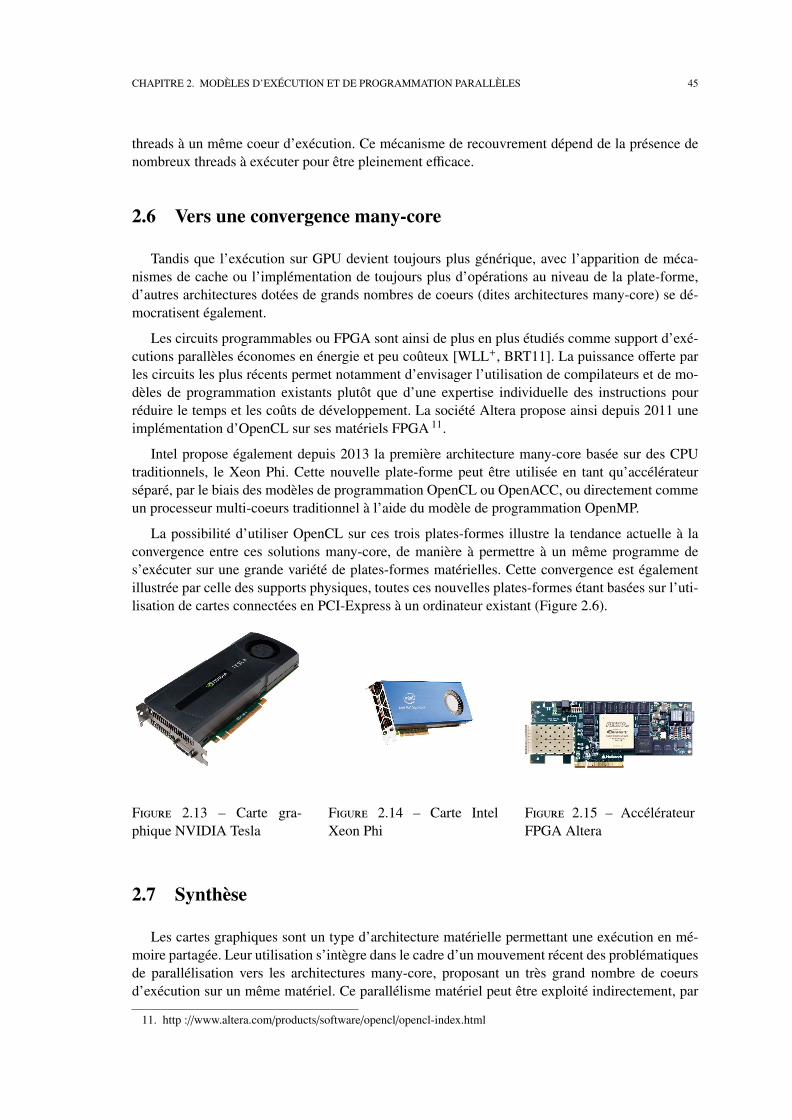
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 45
threads à un même coeur d’exécution. Ce mécanisme de recouvrement dépend de la présence denombreux threads à exécuter pour être pleinement efficace.
2.6 Vers une convergence many-core
Tandis que l’exécution sur GPU devient toujours plus générique, avec l’apparition de méca-nismes de cache ou l’implémentation de toujours plus d’opérations au niveau de la plate-forme,d’autres architectures dotées de grands nombres de coeurs (dites architectures many-core) se dé-mocratisent également.
Les circuits programmables ou FPGA sont ainsi de plus en plus étudiés comme support d’exé-cutions parallèles économes en énergie et peu coûteux [WLL+, BRT11]. La puissance offerte parles circuits les plus récents permet notamment d’envisager l’utilisation de compilateurs et de mo-dèles de programmation existants plutôt que d’une expertise individuelle des instructions pourréduire le temps et les coûts de développement. La société Altera propose ainsi depuis 2011 uneimplémentation d’OpenCL sur ses matériels FPGA 11.
Intel propose également depuis 2013 la première architecture many-core basée sur des CPUtraditionnels, le Xeon Phi. Cette nouvelle plate-forme peut être utilisée en tant qu’accélérateurséparé, par le biais des modèles de programmation OpenCL ou OpenACC, ou directement commeun processeur multi-coeurs traditionnel à l’aide du modèle de programmation OpenMP.
La possibilité d’utiliser OpenCL sur ces trois plates-formes illustre la tendance actuelle à laconvergence entre ces solutions many-core, de manière à permettre à un même programme des’exécuter sur une grande variété de plates-formes matérielles. Cette convergence est égalementillustrée par celle des supports physiques, toutes ces nouvelles plates-formes étant basées sur l’uti-lisation de cartes connectées en PCI-Express à un ordinateur existant (Figure 2.6).
Figure 2.13 – Carte gra-phique NVIDIA Tesla
Figure 2.14 – Carte IntelXeon Phi
Figure 2.15 – AccélérateurFPGA Altera
2.7 Synthèse
Les cartes graphiques sont un type d’architecture matérielle permettant une exécution en mé-moire partagée. Leur utilisation s’intègre dans le cadre d’un mouvement récent des problématiquesde parallélisation vers les architectures many-core, proposant un très grand nombre de coeursd’exécution sur un même matériel. Ce parallélisme matériel peut être exploité indirectement, par
11. http ://www.altera.com/products/software/opencl/opencl-index.html
CHAPITRE 2. MODÈLES D’EXÉCUTION ET DE PROGRAMMATION PARALLÈLES 46
le biais de bibliothèques de parallélisation proposant des opérations de haut niveau, ou via desplates-formes telles que OpenCL ou CUDA. Dans ce dernier cas se posent toutefois de nom-breuses considérations d’implémentations pour obtenir un programme performant, exploitant lesressources offertes par le matériel de manière efficace.
L’utilisation de cette architecture d’exécution est déjà possible dans le cadre de nombreusesbibliothèques d’algèbre linéaire. Si ce type de problème n’est pas forcément directement utilisédans les systèmes multi-agents, cette possibilité de proposer des traitements parallélisés en faitune piste intéressante pour l’accélération de programmes existants. Les cartes graphiques se dis-tinguent également par leur disponibilité sur de nombreuses machines personnelles, par oppositionà des solutions matérielles spécialisées comme les grilles ou les clusters, ce qui en fait une pisteintéressante pour la parallélisation de systèmes multi-agents.
3Parallelisation de systemes multi-agents
Comme évoqué dans notre présentation des systèmes multi-agents, l’utilisation de simulationsde tailles importantes peut rapidement engendrer des besoins en temps d’exécution et en mémoireimportants. L’objectif du recours à la parallélisation est de résoudre ces problèmes en permettantl’accès à davantage de ressources mémoires ou d’exécution.
Comme nous venons de le voir, la démarche de parallélisation d’un programme implique unerépartition de son exécution et parfois de ses données. Ce découpage est facilité dans le cas desmodèles multi-agents par la décomposition du système en agents indépendants dotés de compor-tements et de données propres. La parallélisation d’une simulation multi-agents est un processuscomplexe en temps et en ressources, du fait de l’exécution naturellement synchrone de nombreuxmodèles sur la base de pas de temps ou d’événements. Ce synchronisme impose en effet de nom-breux échanges de données en cours de simulation. La délégation d’une partie de la simulation àchaque hôte ou l’exécution en mémoire partagée du système sont donc généralement les paralléli-sations les plus aisées à réaliser [Ble09] car elles minimisent le nombre d’échanges nécessaires à lasynchronisation. L’environnement représente alors la seule structure globale devant être partagéeentre l’ensemble de l’exécution.
Dans les sections suivantes, nous présentons ces différentes approches de parallélisation desystèmes multi-agents pour souligner les problématiques qui devront être abordées dans notre pro-position. Pour chacune, nous évoquons son principe ainsi que ses indications ou contre-indications.Nous voyons ensuite leur utilisation dans le cadre de plates-formes multi-agents parallèles qui dé-chargent le concepteur d’une partie importante de la gestion de cette parallélisation. Enfin, nousprésentons des applications de ces techniques de parallélisation au GPU dans le cadre de diverstypes de systèmes multi-agents, avant de présenter FLAME-GPU, une première plate-forme multi-agents générique pour l’exécution sur GPU.
3.1 Stratégies de parallélisation
Il est possible de décomposer l’exécution d’un système multi-agents en trois grandes dyna-miques [MFD09], illustrées sur la Figure 3.1 :
— Celle de l’environnement, qui définit l’évolution de l’espace simulé.— Celle des comportements des différents agents présents dans le système.— Celle de l’ordonnanceur, qui contrôle l’exécution et la synchronisation des deux dyna-
miques précédentes. C’est cet ordonnanceur qui détermine si l’exécution de la simulationest guidée par des pas de temps (time-driven) ou par des événements (event-driven).
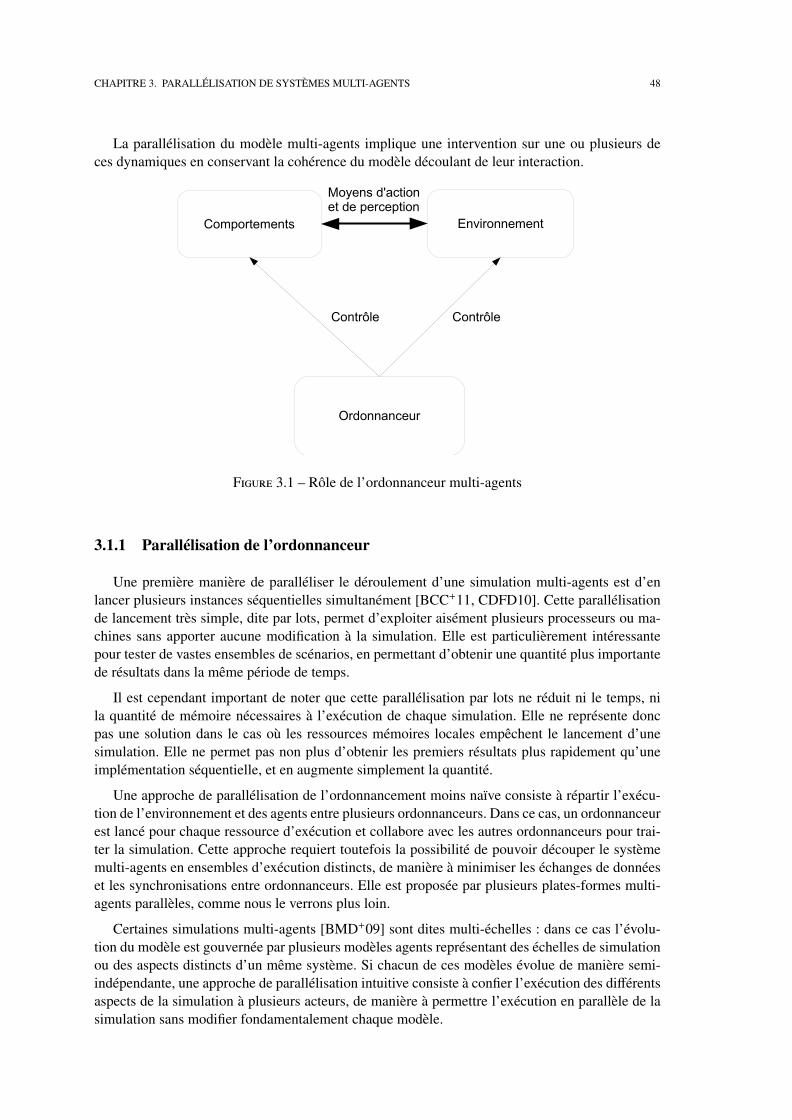
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 48
La parallélisation du modèle multi-agents implique une intervention sur une ou plusieurs deces dynamiques en conservant la cohérence du modèle découlant de leur interaction.
Comportements Environnement
Ordonnanceur
Contrôle Contrôle
Moyens d'action et de perception
Figure 3.1 – Rôle de l’ordonnanceur multi-agents
3.1.1 Parallélisation de l’ordonnanceur
Une première manière de paralléliser le déroulement d’une simulation multi-agents est d’enlancer plusieurs instances séquentielles simultanément [BCC+11, CDFD10]. Cette parallélisationde lancement très simple, dite par lots, permet d’exploiter aisément plusieurs processeurs ou ma-chines sans apporter aucune modification à la simulation. Elle est particulièrement intéressantepour tester de vastes ensembles de scénarios, en permettant d’obtenir une quantité plus importantede résultats dans la même période de temps.
Il est cependant important de noter que cette parallélisation par lots ne réduit ni le temps, nila quantité de mémoire nécessaires à l’exécution de chaque simulation. Elle ne représente doncpas une solution dans le cas où les ressources mémoires locales empêchent le lancement d’unesimulation. Elle ne permet pas non plus d’obtenir les premiers résultats plus rapidement qu’uneimplémentation séquentielle, et en augmente simplement la quantité.
Une approche de parallélisation de l’ordonnancement moins naïve consiste à répartir l’exécu-tion de l’environnement et des agents entre plusieurs ordonnanceurs. Dans ce cas, un ordonnanceurest lancé pour chaque ressource d’exécution et collabore avec les autres ordonnanceurs pour trai-ter la simulation. Cette approche requiert toutefois la possibilité de pouvoir découper le systèmemulti-agents en ensembles d’exécution distincts, de manière à minimiser les échanges de donnéeset les synchronisations entre ordonnanceurs. Elle est proposée par plusieurs plates-formes multi-agents parallèles, comme nous le verrons plus loin.
Certaines simulations multi-agents [BMD+09] sont dites multi-échelles : dans ce cas l’évolu-tion du modèle est gouvernée par plusieurs modèles agents représentant des échelles de simulationou des aspects distincts d’un même système. Si chacun de ces modèles évolue de manière semi-indépendante, une approche de parallélisation intuitive consiste à confier l’exécution des différentsaspects de la simulation à plusieurs acteurs, de manière à permettre l’exécution en parallèle de lasimulation sans modifier fondamentalement chaque modèle.
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 49
3.1.2 Parallélisation des comportements
Une seconde approche de parallélisation consiste à paralléliser l’exécution des comportementsdes agents du modèle. Cette parallélisation peut être effectuée au niveau du système dans sonensemble, au niveau de l’agent, ou au niveau de chaque comportement.
Dans le premier cas, l’ensemble des traitements de même type dans le système sera exécutésimultanément. Pour des raisons d’équité, l’exécution des agents demeure synchronisée, ce quipermet d’assurer que tous les agents se déplacent, respirent, ou consomment de l’énergie en mêmetemps. Ce type de parallélisation, consistant à lancer le même traitement pour un grand nombred’agents, est bien adapté à une exécution sur GPU.
Dans le second cas, la parallélisation permet le traitement simultané de plusieurs types de com-portements, de manière à gérer l’évolution de manière asynchrone à l’intérieur d’un pas d’évolu-tion. Il est dans ce cas impossible de garantir que tous les agents progressent à la même vitessedans leurs traitements : un agent est ainsi susceptible de se déplacer avant qu’un autre ne respireou inversement. Cette seconde approche est sans doute l’une des plus réaliste pour des modèles oùl’équité est introduite par la modélisation, mais elle est en pratique une des plus difficiles à mettreen place et à contrôler.
Dans le dernier cas, enfin, l’algorithme d’évolution des agents n’est pas modifié et seul letraitement du comportement lui-même est parallélisé. Cette dernière approche est particulièrementintéressante dans le cas d’agents effectuant des actions coûteuses, à même d’être parallélisées, dansle cadre de leur évolution. Des exemples d’actions candidates à la parallélisation sont la collectede données dans un périmètre étendu, ou encore le calcul de déplacements complexes mettant enjeu de nombreux paramètres.
3.1.3 Parallélisation de l’environnement
Un dernier axe de parallélisation concerne la dynamique de l’environnement. En fonction dusystème multi-agents décrit, cette dynamique peut être inexistante, si l’environnement est utilisécomme un simple repère spatial comme dans le cas des modèles d’essaims, ou au contraire trèscomplexe comme dans le cas de modèles comme les fourmis. Si le temps de traitement de la miseà jour de l’environnement représente une portion significative du temps d’exécution du modèle, ildevient dans ce cas intéressant de paralléliser cette mise à jour.
La parallélisation de l’environnement est également souvent requise parce qu’il s’agit de lastructure de données dont taille est la plus importante dans le modèle. Dans ce cas, la parallélisationne vise plus uniquement l’obtention de meilleures performances, mais également la possibilité desimuler des environnements de taille plus importante. Le découpage de l’environnement impliquegénéralement la répartition des agents présents dans le modèle, de manière à pouvoir conserver lesportions d’environnements et leurs agents associés sur les mêmes unités d’exécution. Ce type departitionnement est également proposé par de nombreuses plates-formes agents parallèles.
3.2 Plates-formes multi-agents
La parallélisation de simulations multi-agents rencontre de nombreuses difficultés liées àl’adaptation d’un programme en mémoire partagée ou distribuée. Il est ainsi possible de citer lanécessité d’identifier les sections parallèles de l’algorithme et de synchroniser l’accès aux donnéespartagées en mémoire partagée, ou la décomposition explicite des données et de l’algorithme ainsi
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 50
que la prise en compte des échanges et des communications requises par l’exécution en mémoiredistribuée.
Heureusement, le formalisme multi-agents propose une décomposition du système en agentsou en environnement dont la gestion et les échanges peuvent être traités par des plates-formesmulti-agents spécialisées. Cette prise en charge d’une partie de l’exécution permet également à detelles plates-formes de faciliter cette démarche de parallélisation.
3.2.1 Madkit
MadKit (Multi-Agent Development Kit) 1 est une plate-forme générique de développement etd’exécution de systèmes multi-agents [GF00a] réalisée en Java. Elle est développée au sein duLIRRM 2.
Le modèle AGR (Agent, Groupe, Rôle) [Gut01] est à la base des modèles et de l’architecture dela plate-forme, dont les différents services sont implémentés par des agents pour un maximum deflexibilité. Le noyau de Madkit se caractérise par sa légèreté et n’assure que les services nécessairesà la mise en place de ces agents : la gestion des groupes et des rôles, un ordonnancement synchrone,et une infrastructure d’échange de messages entre agents locaux.
Par défaut MadKit associe un thread à chaque agent autonome présent dans le système. Pouréviter l’utilisation de milliers de threads dans le cas de nombres importants d’agents, il est possiblede créer des agents découplés de l’ordonnanceur, gérés et mis à jour par un ou plusieurs agentsobservateurs associés à des threads d’exécution. Ce modèle multi-thread permet une parallélisationaisée des agents en mémoire partagée.
La parallélisation du modèle en mémoire distribuée est rendue possible par la possibilité delancer plusieurs noyaux MadKit et de surcharger le service d’échange de messages pour permettreà toutes ces simulations de communiquer [GF00b]. Cette surcharge d’un service système est per-mise par la présence de points d’accroche (hook) permettant de surveiller les messages échangésou de remplacer un service particulier. Un agent permettant ce fonctionnement nommé Communi-cator est fourni par défaut avec MadKit. Chaque noyau exécute alors une instance de cette agentCommunicator pour gérer l’échange des messages. Un nouveau mécanisme de distribution per-mettant le dialogue par le biais d’un agent réseau sans connaître l’emplacement des instancesdistantes, NetComm [RHK06], a depuis également été proposé. Ces mécanismes de communica-tion permettent soit une distribution maître-esclave, où un noyau possède le modèle de référencemis à jour par les agents distants, soit sur une duplication du modèle sur chaque instance. Ces deuxapproches de distribution sont étudiées plus en détail dans [MBF02].
3.2.2 JADE
La plate-forme JADE [BCG07] est une plate-forme multi-agents développée en Java par legroupe de recherche CSELT (partie de Gruppo Telecom). Elle permet la réalisation de systèmesmulti-agents conformes à la norme FIPA [fip].
Les services FIPA sont fournis directement par la plate-forme JADE, ce qui rend le support dela norme transparent pour le concepteur de modèle.
L’intégration d’un nouvel agent dans un modèle JADE en cours d’exécution est décomposée
1. http://www.madkit.org2. Laboratoire d’Informatique, de Robotique et de Microélectronique de Montpellier
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 51
en plusieurs étapes :
— L’enregistrement de l’agent auprès de la plate-forme agent.— L’attribution d’un nom et d’une adresse unique à l’agent.— L’utilisation des services de recherche et de communication pour s’interfacer avec les
autres agents.
Ce découplage des agents de leur emplacement physique rend possible la migration d’agentsentre machines en cours d’exécution, au moyen d’un ensemble d’outils prenant en charge le dé-ploiement et le suivi du modèle. La distribution est assurée par l’utilisation des threads et uneinterface de communication proposée par JADE. Cette interface repose sur le protocole RMI pro-posé par Java pour communiquer entre instances distantes [VQC02].
JADE ne prend en charge que la création, l’évolution et la communication entre agents, etne propose aucune structure de données pour la représentation de l’environnement ou d’autresdonnées partagées. La représentation de ces éléments est néanmoins possible sous forme d’ob-jets indépendant ou d’agents spécifiques dans la simulation. Il est ensuite possible d’utiliser desmessages pour envoyer ou recevoir des informations sur ces structures partagées.
En prenant en compte toutes les communications, JADE facilite l’utilisation d’une architectureen mémoire partagée ou distribuée pour la simulation multi-agents. Cette plate-forme se limitetoutefois à ce rôle, et ne propose pas de mécanisme de synchronisation ou de partage automatiquedes données entre instances d’exécution : cette gestion reste de la responsabilité du concepteur dumodèle, en utilisant les structures de données fournies par le langage Java.
3.2.3 FLAME
FLAME 3 [HCS06] est un générateur de simulations multi-agents parallélisées. Il se base pourcela sur la description des modèles sous la forme de machines à états (X-Machine) en XMML,version étendue du XML. Cette description abstraite permet de découpler l’exécution du systèmemulti-agents de toute plate-forme d’exécution spécifique.
La description d’un modèle FLAME repose sur la spécification d’un état initial, d’un ensembled’états intermédiaires et d’un ou plusieurs état finaux. Le passage entre ces états est décrit sousforme de fonctions de transition, exécutées pour chaque agent à chaque pas de temps de la simu-lation. Une itération, ou pas de temps, est définie comme la fenêtre de temps nécessaire à chaqueagent pour progresser de son état initial à l’un des états finaux du graphe de transitions. Ce proces-sus est reproduit à chaque itération.
En parallèle de ces états représentant les stades d’exécution de chaque agent, FLAME associeà chaque agent une mémoire pouvant contenir des variables lues et modifiées par les différentesfonctions de transition.
La communication entre agents est assurée par la possibilité d’envoyer et de recevoir des mes-sages au niveau de ces mêmes fonctions de transition. Leur transmission est réalisée de manièresynchrone, pour garantir la réception simultanée de chaque message par tous ses destinataires :cette synchronisation est particulièrement importante lors de l’exécution d’un modèle sur une ar-chitecture distribuée HPC pour permettre qu’aucun agent ne soit favorisé ou défavorisé par sonordre de passage. Les messages sont distribués à l’ensemble des agents du modèle par la biblio-thèque Libmboard basée sur MPI pour les échanges de messages [KRH+10]. Il est ensuite possibleà chaque agent de filtrer les seuls messages le concernant.
3. FLexible Large-scale Agent-based Modeling Environment

CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 52
La modélisation d’un modèle en FLAME est décomposée en quatre étapes :
— La description de chaque agent et de sa fonction.— La description des états correspondant à leur évolution à chaque itération— L’identification des variables utilisées pour le déclenchement et dans le traitement de
chaque fonction de transition définie dans le modèle.— L’identification des messages émis ou reçus par ces fonctions de transition.
Ce processus peut être représenté sous la forme d’un diagramme de transition. La Figure 3.2illustre une représentation possible d’un modèle d’essaim (Swarm) avec FLAME.
débutDiffusion
de la positionétat 1 état 2
Réceptionautres positions
finMise à jour
position
Nouvelle itération
Figure 3.2 – Représentation conceptuelle d’une itération de modèle Swarm
L’implémentation du modèle économique européen EURACE, mettant en jeu des agents inter-venants sur plusieurs marchés économiques, prévoit d’utiliser ces mécanismes [DvdHD08].
La plate-forme FLAME permet de s’abstraire totalement de la démarche de parallélisation enmémoire partagée ou en mémoire distribuée, en prenant en charge la totalité de la génération dela simulation. Cette abstraction dépend toutefois d’une description très fine du modèle et de sesinteractions par le concepteur, qui contraint fortement la définition des modèles.
3.2.4 Repast HPC
Repast HPC [CN11] est une bibliothèque dédiée au calcul sur architectures hautes perfor-mances. Elle propose une implémentation des concepts fondamentaux de RepastSimphony sur desarchitectures mémoire distribuées et plus particulièrement sur les clusters de calculs. Le dévelop-pement de modèles agents avec Repast HPC peut être effectué directement à l’aide des composantsde la bibliothèque ou en manipulant des concepts d’emplacements et de tortues inspirés de Logo.
L’implémentation des agents est réalisée sous forme d’instances de classes C++ encapsuléesdans un Contexte représentant leur environnement. Leur organisation dans le modèle est assuréepar la définition de Projections. Une projection grille place ainsi les agents dans une structure grilleoù chaque agent correspond à une cellule, tandis qu’une projection réseau permet la mise en placede relations entre agents. Une simulation Repast HPC est ainsi composée d’agents, d’au moins uncontexte, et de zéro ou plusieurs projections.
La distribution des agents en Repast HPC est basée sur un parallélisme à mémoire distribuée.Les agents du modèle sont répartis entre plusieurs processus responsables du traitement de leursagents locaux. L’interaction avec un agent distant requiert sa copie en mémoire locale, la mo-dification de cette copie, puis sa synchronisation avec l’agent original, pendant que l’exécutionde l’agent distant est suspendue [rep]. Pour faciliter la gestion de ces copies, chaque agent estidentifié de manière unique par trois informations : un identifiant attribué par l’utilisateur, l’indexde son processus de lancement et son type. Chaque agent stocke également l’index du processus
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 53
l’exécutant actuellement.
La synchronisation et l’échange des agents entre processus sont assurés via le protocole decommunication MPI [rep] par le biais de son implémentation BoostMPI 4.
Ce mécanisme de découpage permet à Repast HPC de prendre en charge de nombreuses pro-blématiques de la parallélisation en mémoire distribuée et en particulier la copie et l’exécution desagents présents sur les différents noeuds d’exécution.
3.2.5 D-MASON
La plate-forme D-MASON [CCC+12] est une version parallèle de la bibliothèque MASON,ajoutant une couche supplémentaire permettant la distribution de la simulation en mémoire distri-buée sur des machines hétérogènes.
La distribution de la simulation en D-MASON est basée sur trois blocs fonctionnels, un gestion-naire, des travailleurs (workers) correspondant à des threads Java et des communications. Le rôlede gestionnaire est assuré par une application maîtresse qui prépare la simulation et gère ensuiteson déroulement en pas de temps synchrones en coordonnant les différents processus travailleurs.
Cette répartition des tâches repose sur le partitionnement de l’espace à simuler en régions pou-vant être assignées à un worker particulier. Chaque worker est ensuite responsable de l’exécutiondes agents présents dans sa région, ainsi que de la synchronisation des traitements ou de la mi-gration des agents entre régions. Les échanges requis pour ces opérations sont gérés par le biaisde JMS [CCM+11], une interface de programmation permettant d’envoyer et de recevoir des mes-sages asynchrones entre composants Java.
Cette répartition automatique de l’environnement par la plate-forme, associée à celle de l’or-donnancement et des traitements, permet la gestion des trois approches de parallélisation de sys-tèmes multi-agents. D-MASON se caractérise de manière générale par la volonté d’introduire ladistribution à tous les niveaux du système, plutôt que de se focaliser uniquement sur les perfor-mances, pour résoudre les limitations en ressources, en particulier mémoires, de manière transpa-rente pour le concepteur.
3.2.6 Pandora
Une dernière plate-forme permettant la distribution d’un système multi-agents sur plusieursnoeuds de cluster est Pandora [pan]. Cette plate-forme permet le prototypage rapide de modèles àl’aide du langage de programmation Python, ou la réalisation de modèles plus complexes à l’aidede C++. Ces deux langages d’implémentation partagent la même interface de programmation etles mêmes concepts, de manière à faciliter l’adaptation de modèles entre les deux syntaxes. Il estplus particulièrement conçu pour la simulation de milliers d’agents dans un espace géographique.
La distribution en mémoire partagée des systèmes Pandora repose sur la distribution de por-tions de l’environnement et des agents sur chaque noeud du système à l’aide de OpenMP et deMPI [ASÁ01]. La parallélisation locale de la simulation est basée sur l’observation par ses concep-teurs d’une décomposition standard du cycle agent dans de nombreux modèles multi-agents :
— Évaluation de l’environnement et des stimulis.— Prise de décision quant à l’action à effectuer.— Réalisation de l’action.
4. http://www.boost.org/
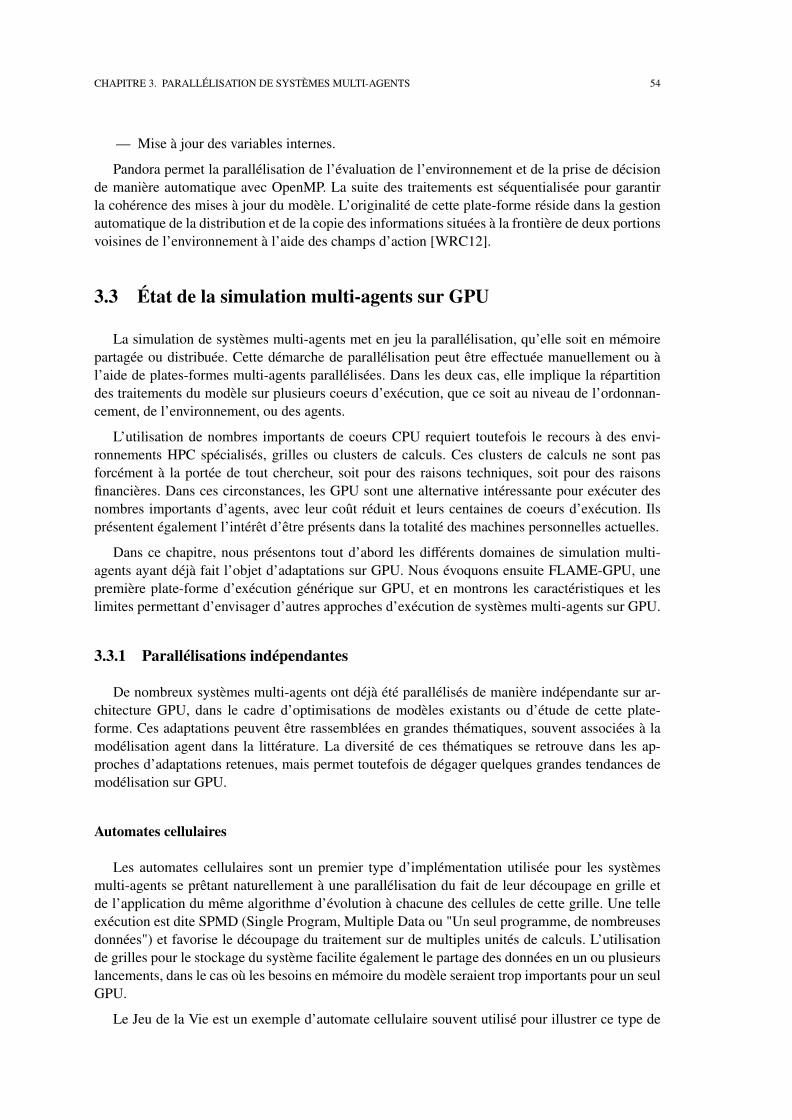
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 54
— Mise à jour des variables internes.
Pandora permet la parallélisation de l’évaluation de l’environnement et de la prise de décisionde manière automatique avec OpenMP. La suite des traitements est séquentialisée pour garantirla cohérence des mises à jour du modèle. L’originalité de cette plate-forme réside dans la gestionautomatique de la distribution et de la copie des informations situées à la frontière de deux portionsvoisines de l’environnement à l’aide des champs d’action [WRC12].
3.3 État de la simulation multi-agents sur GPU
La simulation de systèmes multi-agents met en jeu la parallélisation, qu’elle soit en mémoirepartagée ou distribuée. Cette démarche de parallélisation peut être effectuée manuellement ou àl’aide de plates-formes multi-agents parallélisées. Dans les deux cas, elle implique la répartitiondes traitements du modèle sur plusieurs coeurs d’exécution, que ce soit au niveau de l’ordonnan-cement, de l’environnement, ou des agents.
L’utilisation de nombres importants de coeurs CPU requiert toutefois le recours à des envi-ronnements HPC spécialisés, grilles ou clusters de calculs. Ces clusters de calculs ne sont pasforcément à la portée de tout chercheur, soit pour des raisons techniques, soit pour des raisonsfinancières. Dans ces circonstances, les GPU sont une alternative intéressante pour exécuter desnombres importants d’agents, avec leur coût réduit et leurs centaines de coeurs d’exécution. Ilsprésentent également l’intérêt d’être présents dans la totalité des machines personnelles actuelles.
Dans ce chapitre, nous présentons tout d’abord les différents domaines de simulation multi-agents ayant déjà fait l’objet d’adaptations sur GPU. Nous évoquons ensuite FLAME-GPU, unepremière plate-forme d’exécution générique sur GPU, et en montrons les caractéristiques et leslimites permettant d’envisager d’autres approches d’exécution de systèmes multi-agents sur GPU.
3.3.1 Parallélisations indépendantes
De nombreux systèmes multi-agents ont déjà été parallélisés de manière indépendante sur ar-chitecture GPU, dans le cadre d’optimisations de modèles existants ou d’étude de cette plate-forme. Ces adaptations peuvent être rassemblées en grandes thématiques, souvent associées à lamodélisation agent dans la littérature. La diversité de ces thématiques se retrouve dans les ap-proches d’adaptations retenues, mais permet toutefois de dégager quelques grandes tendances demodélisation sur GPU.
Automates cellulaires
Les automates cellulaires sont un premier type d’implémentation utilisée pour les systèmesmulti-agents se prêtant naturellement à une parallélisation du fait de leur découpage en grille etde l’application du même algorithme d’évolution à chacune des cellules de cette grille. Une telleexécution est dite SPMD (Single Program, Multiple Data ou "Un seul programme, de nombreusesdonnées") et favorise le découpage du traitement sur de multiples unités de calculs. L’utilisationde grilles pour le stockage du système facilite également le partage des données en un ou plusieurslancements, dans le cas où les besoins en mémoire du modèle seraient trop importants pour un seulGPU.
Le Jeu de la Vie est un exemple d’automate cellulaire souvent utilisé pour illustrer ce type de
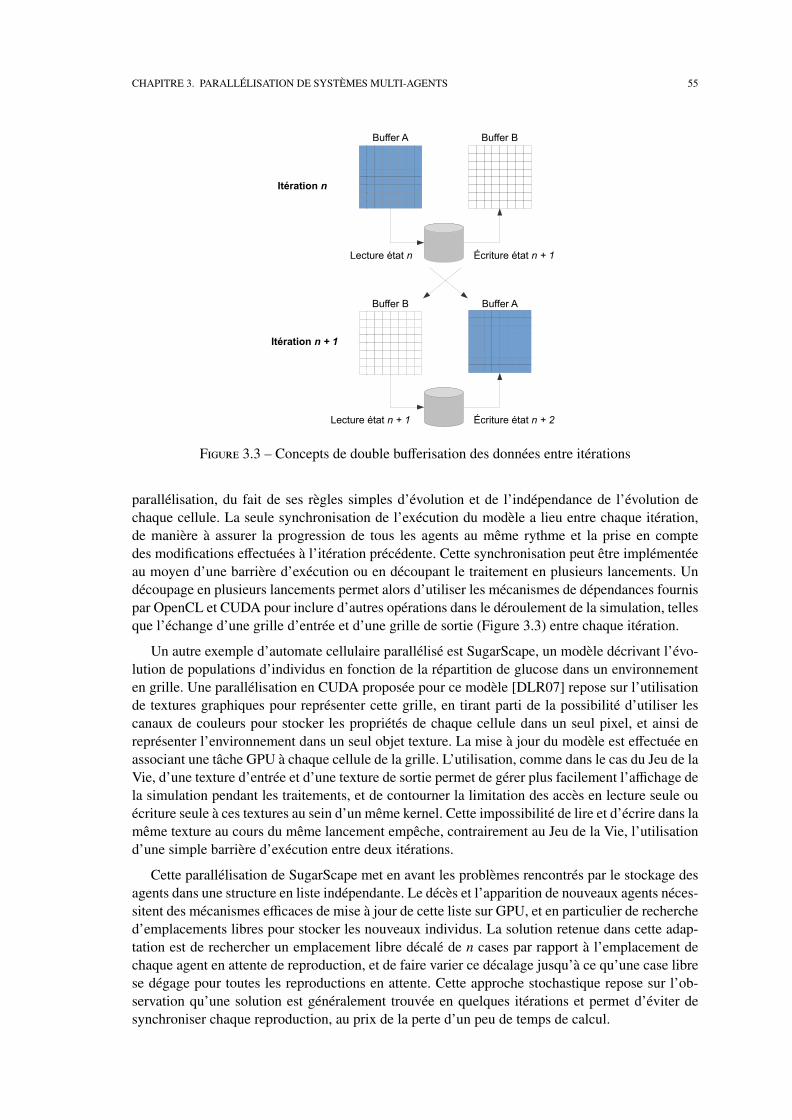
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 55
Buffer A Buffer B
Lecture état n Écriture état n + 1
Buffer B Buffer A
Lecture état n + 1 Écriture état n + 2
Itération n
Itération n + 1
Figure 3.3 – Concepts de double bufferisation des données entre itérations
parallélisation, du fait de ses règles simples d’évolution et de l’indépendance de l’évolution dechaque cellule. La seule synchronisation de l’exécution du modèle a lieu entre chaque itération,de manière à assurer la progression de tous les agents au même rythme et la prise en comptedes modifications effectuées à l’itération précédente. Cette synchronisation peut être implémentéeau moyen d’une barrière d’exécution ou en découpant le traitement en plusieurs lancements. Undécoupage en plusieurs lancements permet alors d’utiliser les mécanismes de dépendances fournispar OpenCL et CUDA pour inclure d’autres opérations dans le déroulement de la simulation, tellesque l’échange d’une grille d’entrée et d’une grille de sortie (Figure 3.3) entre chaque itération.
Un autre exemple d’automate cellulaire parallélisé est SugarScape, un modèle décrivant l’évo-lution de populations d’individus en fonction de la répartition de glucose dans un environnementen grille. Une parallélisation en CUDA proposée pour ce modèle [DLR07] repose sur l’utilisationde textures graphiques pour représenter cette grille, en tirant parti de la possibilité d’utiliser lescanaux de couleurs pour stocker les propriétés de chaque cellule dans un seul pixel, et ainsi dereprésenter l’environnement dans un seul objet texture. La mise à jour du modèle est effectuée enassociant une tâche GPU à chaque cellule de la grille. L’utilisation, comme dans le cas du Jeu de laVie, d’une texture d’entrée et d’une texture de sortie permet de gérer plus facilement l’affichage dela simulation pendant les traitements, et de contourner la limitation des accès en lecture seule ouécriture seule à ces textures au sein d’un même kernel. Cette impossibilité de lire et d’écrire dans lamême texture au cours du même lancement empêche, contrairement au Jeu de la Vie, l’utilisationd’une simple barrière d’exécution entre deux itérations.
Cette parallélisation de SugarScape met en avant les problèmes rencontrés par le stockage desagents dans une structure en liste indépendante. Le décès et l’apparition de nouveaux agents néces-sitent des mécanismes efficaces de mise à jour de cette liste sur GPU, et en particulier de recherched’emplacements libres pour stocker les nouveaux individus. La solution retenue dans cette adap-tation est de rechercher un emplacement libre décalé de n cases par rapport à l’emplacement dechaque agent en attente de reproduction, et de faire varier ce décalage jusqu’à ce qu’une case librese dégage pour toutes les reproductions en attente. Cette approche stochastique repose sur l’ob-servation qu’une solution est généralement trouvée en quelques itérations et permet d’éviter desynchroniser chaque reproduction, au prix de la perte d’un peu de temps de calcul.
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 56
Ces deux exemples illustrent l’importance des traitements et des échanges de grilles pour pa-ralléliser ce type d’implémentation.
Agents indépendants
Un autre modèle souvent parallélisé sur GPU est celui des fourmis [CGU+11, UIN12], dontla mise à jour peut être décomposée en deux processus distincts, comme nous l’avons vu dans ladescription du modèle :
— La mise à jour de l’environnement, et en particulier la simulation de la diffusion et del’évaporation au cours du temps des phéromones déposées par les fourmis.
— La gestion du déplacement des fourmis (agents) elles-mêmes, au vu de ces données envi-ronnementales et de leur état actuel, à la recherche de nourriture ou en train de rapporterdes ressources. Ce second état conditionne le dépôt ou non de phéromones par l’individu.
La parallélisation de ce modèle sur GPU pose le problème de synchroniser l’exécution deces deux processus à chaque itération. L’utilisation de textures impose, comme dans le cas dumodèle SugarScape, le recours à plusieurs kernels d’exécution distincts pour pouvoir accéder àces textures alternativement en écriture, pour la mise à jour des quantités de phéromones, puis enlecture au moment de la détermination du comportement de chaque individu. Cette parallélisationmet l’accent sur l’importance de la synchronisation, et plus généralement de la possibilité de mettreen place un graphe de dépendance, pour l’exécution de la simulation en parallèle sur GPU.
Un autre exemple de modèle multi-agents avec des agents indépendants est le mouvement devolées de différentes espèces d’oiseaux dans un espace en deux dimensions [Wei13]. Ce mouve-ment, inspiré du modèle Boids décrit par Craid Reynolds en 1987 [Rey87], illustre l’apparitionde comportements émergents au niveau de volées d’oiseaux à partir de règles simples assignées àchaque individu, aboutissant à un compromis de déplacement à chaque itération. Les règles utili-sées sont les suivantes :
— Séparation : choix de la direction de manière à éviter une trop grande agglomération avecles oiseaux voisins.
— Alignement : choix de la direction de manière à adopter la même direction de déplacementque les oiseaux voisins.
— Regroupement : choix de la direction de manière à se rapprocher du centre de masse desoiseaux à proximité.
Les oiseaux décrits sont positionnés dans un espace continu et il n’existe donc plus cette foisaucune grille sur laquelle baser un découpage pour GPU. Le positionnement de chaque agentdans l’environnement est à la place indiqué par un jeu de coordonnées associé à chaque individu.Le mouvement de chaque individu est également stocké dans ses propriétés sous la forme d’unvecteur. Dans ce cas, le découpage d’exécution retenu n’est plus basé sur une sous-division del’environnement, mais sur l’association d’une tâche de traitement à chaque individu. La synchro-nisation entre les individus est effectuée à l’aide de barrières d’exécution dans un même lancementde kernel d’exécution. Pour minimiser le nombre et donc les coûts d’accès à la mémoire globale,les oiseaux sont regroupés en ensembles (clusters) dont les positions et les vitesses sont recopiéesen mémoire partagée.
Un dernier modèle d’agent concerne la simulation de la propagation de la tuberculose dansles cellules du système immunitaire [DLMK09]. Cet exemple réintroduit un découpage de l’envi-ronnement en espace discret, sous la forme d’une grille d’agents représentant alternativement desmacrophages ou des lymphocytes-T. Chacun de ces agents est associé à un automate à états finis
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 57
déterminant les états accessibles à chaque agent en fonction de son état actuel. La parallélisationdu modèle est effectuée par le biais de plusieurs kernels lancés à des fréquences différentes. Unpremier kernel, exécuté cent fois plus fréquemment que les autres traitements, gère ainsi la diffu-sion des marqueurs chimiques dans l’environnement. Un second kernel gère la reproduction desbactéries dans l’environnement de simulation, tandis que quatre autres kernels gèrent la mise à jourde l’état de chaque macrophage et lymphocyte T, puis leur déplacement et le recrutement de nou-veaux individus. Cet exemple met en avant le nombre importants d’opérations différentes pouvantêtre présentes dans un même modèle agent, et l’importance de pouvoir exécuter ces traitements àla suite sur GPU, après initialisation et copie des données depuis le CPU.
Recherche de chemins (pathfinding)
Un autre domaine d’application multi-agents souvent rencontré dans les exemples de paralléli-sation sur GPU est la recherche de chemins en deux ou trois dimensions, dans des environnementscontinus ou discrets [FSN09, GCK+09]. La popularité de ce type de traitement s’explique parl’existence d’une forte demande au niveau de ce type d’algorithme dans l’industrie vidéo-ludique(déplacement d’unités) et les simulations urbaines ou de transport.
Ces modèles agents considèrent généralement un individu associé à une position dans l’espace,et éventuellement une taille, se déplaçant dans un environnement constitué de points de passageet d’obstacles. Dans le cadre d’un découpage de l’environnement en grille, des algorithmes derecherche de chemin dans des grilles et des graphes comme l’algorithme A* [HNR68] peuventalors être utilisés pour déterminer le plus court chemin vers un point destination. Ce type de mo-dèle implique encore une fois de disposer de facilités de traitement de grilles sur GPU, ainsi quela possibilité de mettre à jour ces grilles de manière concurrente pour gérer la cohérence des dé-placements de chaque agent. Cette grille peut être intrinsèque au repère de positionnement, ouêtre appliquée à chaque itération pour discrétiser des positions réelles, de manière à permettrel’application des algorithmes de recherche de plus court chemin.
Un premier exemple de modèle parallélisé concerne le déplacement des unités dans des jeuxde stratégie sur la base de champs de potentiels [SFF+10]. L’utilisation de champs de potentiels,et donc de vecteurs de déplacement, permet dans ce cas non seulement d’obtenir des chemins effi-caces (distance) mais également plus naturels en adoucissant notamment les courbes ou en limitantles comportements peu réalistes (virage à 90°) déclenchés par la détection soudaine d’un obstacle.La difficulté de parallélisation de ce modèle est la nécessité de prendre en compte l’ensemble del’espace de simulation pour déterminer le mouvement calculé par chaque tâche GPU. Pour limiterle nombre d’accès mémoire à effectuer, une carte locale des obstacles et de la direction projetéede son objectif est préalablement créée pour chaque agent et un vecteur associé à chacun de ceséléments. Le déplacement de l’agent est ensuite calculé à partir de la combinaison de ces vecteurs,puis projeté sur l’environnement de simulation. L’utilisation du GPU permet ici de considérer cescartes locales et ces opérations vectorielles en parallèle pour chaque agent, plutôt que d’effectuerun parcours linéaire de chaque individu intégrant un autre parcours des cellules voisines à cetindividu.
Une simulation de déplacement de piétons [RR08] se base sur le découpage des données dechaque agent en canaux de textures. Cet exemple met également en valeur, dans le cas de la re-cherche de chemins, l’utilité du découpage des données en structures d’entrée et structures desortie déjà rencontré pour les automates cellulaires.
Le portage de ce type de simulation sur GPU, notamment par Bleiweiss [Ble09], a égalementamené des réflexions sur d’autres architectures vectorielles [GCK+09] telles que SSE, mettant en
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 58
avant le potentiel de ce type de parallélisation sur architecture many-core massivement parallèlede manière générale.
Il est également possible de citer, pour une réflexion approfondie sur la comparaison de diffé-rentes heuristiques permettant de résoudre ce type de problèmes sur GPU, le mémoire de thèse deA. Delévacq [Del13]. L’auteur commence pour cela par établir une présentation des métaheuris-tiques parallèles existantes sur GPU, avant d’en proposer une taxonomie orientée autour de deuxaxes, en fonction du niveau d’utilisation du GPU dans la métaheuristique d’une part (population,solution ou élément), et en fonction de l’utilisation faite de chaque type de mémoire proposé parle modèle de programmation d’autre part (globale, texture, constante, partagée, registres). Unefois cette taxonomie posée, l’auteur compare alors deux approches différentes de la résolution duproblème du voyageur de commerce, tout d’abord à base de colonies de fourmis, puis à base derecherche locale (RL) de solutions. L’approche à base de colonies de fourmis repose sur l’utili-sation d’individus, les fourmis, parcourant le graphe selon une heuristique de type min-max, demanière à construire progressivement des listes solutions. L’approche RL repose, quant à elle,sur l’amélioration d’une solution existante en évaluant l’impact de modifications locales à cer-taines positions de la liste. Elle est ainsi susceptible de compléter d’autres métaheuristiques pourla recherche de solutions efficaces. Les résultats obtenus montrent des gains de performance signi-ficatifs avec une implémentation GPU, avec un impact sur la qualité des solutions demeurant entre−1.33% et 1.64%. Au contraire, des dégradations significatives sont observées sur la parallélisa-tion de l’approche RL, liées aux découpages en termes de synchronisation rendues nécessaires parl’adaptation sur GPU. Ce mémoire met en évidence l’importance des adaptations dans ce modèlede programmation et celle de la validation par des mesures de leurs conditions d’utilisation.
Réflexions sur des exécutions hybrides GPU et CPU
La parallélisation de systèmes multi-agents a également donné lieu à des réflexions plusgénériques, orientées sur la distribution de la charge en général sur des plates-formes paral-lèles [CCDCS11], ou sur le cas plus particulier de clusters de GPU et de machines multi-coeurs.
En particulier dans [APS10], l’auteur propose la comparaison d’une implémentation à base dethreads et de CUDA du même modèle agent. Pour minimiser le nombre d’échanges nécessairesdans le cas de systèmes multi-agents, où des portions de l’environnement sont réparties dans demultiples copies distantes, l’article propose la mise en place d’un système de zone-frontière auniveau du découpage des données. Ces zones frontières situées autour des données directementutilisées par les agents exécutés en local permettent de prendre en compte la diffusion des erreursde mise à jour liées à l’exécution indépendante de chaque portion du modèle. La largeur de cesfrontières permet de déterminer le nombre de cycles pouvant être exécutés avant que les diver-gences n’impactent d’autres portions de l’environnement simulé, et donc le temps pendant lequelune synchronisation peut être reportée sans impact sur le résultat de la simulation générale. Enréduisant le nombre d’échanges de données nécessaires, ce système d’isolation permet de maxi-miser le temps passé en calcul pour chaque tâche et donc d’améliorer les performances obtenues.L’implémentation GPU proposée est basée sur le modèle de programmation CUDA et des blocsmémoires pour chaque agent ou groupe d’agent. L’utilisation d’OpenCL est toutefois prévue, pourpouvoir tirer parti d’une plus grandes variété d’architectures. Cet article met en évidence l’impactimportant que peut avoir la fréquence de synchronisation des données sur les performances obte-nues, en variant la largeur des frontières autour de la copie de l’environnement de chaque agent.
CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 59
3.3.2 Une plate-forme multi-agents orientée GPU : FLAME-GPU
Si l’utilisation du GPU est à l’étude pour des plates-formes comme JADE [ZG12] ou Turtle-Kit [Mic13], seule FLAME-GPU [Ric11], une extension pour la plate-forme FLAME [CGH+12],permet à l’heure actuelle l’utilisation du GPU pour l’ensemble du modèle.
FLAME-GPU permet la génération d’implémentations GPU de modèles FLAME avec un mi-nimum d’adaptations, de manière à afficher ou exploiter plus facilement de grandes quantitésd’agents. Cette utilisation transparente du GPU est rendue possible du fait de la décompositiontrès fine de la simulation en états et en traitements. La syntaxe XXML, proposée par FLAME, estégalement étendue pour permettre d’indiquer le nombre maximum d’agents présents dans le mo-dèle, de manière à pouvoir allouer à l’avance les structures de données sur GPU. Ces extensionsincluent également des directives permettant de choisir les algorithmes de traitement des fonctionsde transition à utiliser en CUDA.
L’application d’une fonction de transition sur GPU aux agents d’un modèle FLAME est dé-composée en deux étapes :
— Un premier kernel vérifie les pré-conditions d’application de la fonction de transition pourchaque agent du modèle. Si les conditions d’application sont remplies pour cet agent, il estajouté à la liste des agents devant être traités.
— Une fois ce filtrage effectué, la fonction de transition est appliquée à tous les agents enattente de traitement.
Cette décomposition facilite le lancement de traitements réguliers sur le GPU dont l’exécutionpeut être ensuite parallélisée aisément par l’ordonnanceur CUDA.
FLAME-GPU a déjà établi les gains en performance pouvant être obtenus dans plusieurs typesde systèmes multi-agents [RWCR10, KRR10] mais impose, tout comme FLAME, un cadre trèsstrict de modélisation. Ce cadre est basé sur la décomposition du modèle en chacun de ces compor-tements, des données et de toutes leurs interactions, pour permettre à la plate-forme de générer leprogramme capable de les exécuter. Son utilisation n’est donc pas envisageable dans le cadre d’uneplate-forme multi-agents ou d’une implémentation existante, et requiert une réécriture complètedu modèle. Cette absence de portage incrémental impose une barrière d’entrée à l’utilisation duGPU et rend également plus difficile la comparaison du modèle obtenu avec l’original, la gestiondu programme même n’étant plus directement du ressort du concepteur.
Si le formalisme et les plates-formes supportées par FLAME sont extensibles, comme l’illustrel’existence de FLAME-GPU, cette extension se limite également à l’utilisation de CUDA, ce quilimite son utilisation aux seuls matériels NVIDIA, et ne permet pas de tirer parti des cartes gra-phiques d’autres fabriquants présents sur des machines personnelles.
3.4 Synthèse
Dans ce chapitre, nous avons montré les différentes approches de parallélisation possibles pourdes systèmes multi-agents, au niveau de l’ordonnanceur, des comportements ou de l’environne-ment. Nous avons ensuite présenté la manière dont ces approches sont gérées et rendues plusaisément accessibles pour le concepteur par quelques plates-formes multi-agents parallélisées. Laplupart de ces plates-formes permettent une exécution aussi bien en mémoire distribuée ou parta-gée, en distribuant le passage des traitements à l’aide d’une collaboration de plusieurs ordonnan-ceurs. Certaines de ces plates-formes gèrent aussi automatiquement la répartition de l’environne-

CHAPITRE 3. PARALLÉLISATION DE SYSTÈMES MULTI-AGENTS 60
ment entre chaque tâche, pour résoudre tout problème de taille mémoire. De nombreuses solutions,comme JADE, laissent toutefois cette responsabilité au concepteur, plus à même de décider si cesstructures doivent être recopiées ou accédées de manière distante dans sa simulation.
Si la parallélisation sur CPU est aujourd’hui supportée par de nombreuses plates-formes, la pa-rallélisation sur carte graphique est moins répandue. Cette architecture montre pourtant son intérêt,dans le cadre de milliers d’agents à exécuter, par sa possibilité de disposer de plusieurs centainesde coeurs sur une machine personnelle. Des modèles comme SugarScape, ou des implémenta-tions sous forme d’automates cellulaires ou de recherche de chemin mettent ainsi en avant l’intérêten termes de performance du GPU pour l’exécution de traitements homogènes, de type SIMD,souvent rencontrés dans les systèmes multi-agents réactifs.
Le support du GPU n’est cependant pas totalement absent des plates-formes agents : des so-lutions permettant d’utiliser CUDA existent déjà dans des modèles comme JADE. Des couchesd’abstraction, soit des perceptions dans le cas de TurtleKit, soit de tout le modèle dans le cas deFLAME-GPU, existent également.
IIContribution

63
Dans la première partie de notre mémoire nous avons présenté notre contexte, les systèmesmulti-agents et les GPU, et mis en avant l’intérêt de cette nouvelle architecture en termes d’ac-cessibilité et de performance, par rapport aux solutions de parallélisation classiques basées sur ladistribution en mémoire partagée ou en mémoire distribuée.
Dans cette seconde partie, nous introduisons et décrivons maintenant nos contributions à cetteproblématique. Pour cela, nous commençons par étudier la parallélisation sur GPU d’un modèleconcret, le modèle proie-prédateur. Cette parallélisation est pour nous l’occasion d’une réflexionsur les différentes représentations en termes de données et de comportements de ce système, etleur impact sur une adaptation GPU.
Les contraintes rencontrées dans l’adaptation de ce modèle ouvrent alors la voie à une définitiondes principales considérations nécessaires pour le portage d’un système multi-agents sur GPU.Cette présentation est en particulier l’occasion de décrire les différents types de découpages desdonnées ou d’exécution devant être supportés par une bibliothèque pour permettre son utilisationdans les systèmes multi-agents.
Ces contraintes nous servent de préambule pour présenter notre solution, MCMAS, et la ma-nière dont cette bibliothèque répond à ces problématiques d’exécution et de données. Pour cela,nous commençons par présenter les principaux objectifs de MCMAS et leur traduction en termesd’architecture de la bibliothèque. Nous présentons ensuite l’utilisation de MCMAS en tant quebibliothèque de fonctions génériques, puis l’ajout de nouvelles fonctionnalités à cette solution.
L’utilisation de MCMAS est ensuite illustrée de manière expérimentale sur trois modèles :
— Proie-prédateur qui nous a servi de fil rouge dans notre propos.— MIOR, un modèle d’évolution microscopique de sol s’intégrant dans le cas de la simulation
multi-échelles Sworm.— Collemboles, enfin, un modèle permettant de décrire la diffusion de populations entre par-
celles de terrain importées depuis un système d’information géographique.
Une fois ces applications présentées, nous proposons quelques recommandations d’implémen-tation, de manière à prendre en compte les éventuels différences en traitements des données et enperformance associées à chaque matériel d’exécution.

4Problematique
Comme nous l’avons vu dans le chapitre précédent de nombreux systèmes multi-agents ontdéjà été adaptés sur GPU. Dans la plupart des cas, ces adaptations sont basées sur une réécriturecomplète du programme, directement à l’aide d’un modèle de programmation comme OpenCL ouau moyen du formalisme spécialisé proposé par l’environnement FLAME-GPU.
La première approche, l’implémentation directe du modèle avec la programmation GPGPU,permet un contrôle fin sur le programme obtenu mais requiert une expertise et un investissement entemps conséquents pour pouvoir tirer parti efficacement des possibilités offertes par l’architecturematérielle. Ces contraintes s’expliquent par la nécessité d’implémenter la totalité du système agent,sans aucune infrastructure existante pour ce type de simulation.
La seconde approche, l’utilisation de FLAME-GPU, apporte une abstraction totale du moded’exécution en permettant au concepteur de n’avoir qu’à décrire les opérations de son modèle.Elle repose sur l’utilisation de l’approche FLAME pour générer automatiquement le programmeGPU liant ces différentes actions. Cette abstraction présente cependant un coût, en contraignant lastructure des modèles multi-agents décrits dans un formalisme existant strict. Ce formalisme peutêtre aisément utilisé pour la conception de nouveaux modèles mais rend difficile la comparaisondes simulations obtenues avec des simulations plus traditionnelles, du fait de la nature radicaledes changements apportés à l’algorithme. Il permet toutefois la disponibilité d’un support robusteadapté aux agents, et ne laisse donc pas le concepteur livré à lui-même comme un modèle deprogrammation plus générique.
Ces deux approches laissent place à une solution intermédiaire qui permettrait au chercheur dedisposer d’un support incrémental pour les traitements agents sur GPU, de manière à pouvoir yexécuter tout ou partie de la simulation. Une telle solution doit également être capable de s’inté-grer et de complèter une plate-forme multi-agents existante. Cette facilité d’intégration implique laproposition d’une interface orthogonale à la modélisation du système, à même d’être utilisée aussibien dans des cadres basés sur la décomposition du système en messages et en comportementque dans des simulations agents moins segmentées. Elle permet également de tirer parti des nom-breuses facilités d’implémentation et d’exécution déjà offertes par les plates-formes multi-agentsexistantes.
Dans les sections suivantes nous présentons les propriétés nous paraissant particulièrementimportantes pour notre proposition, MCMAS 1.
1. Many-Core Multi-Agent Systems
CHAPITRE 4. PROBLÉMATIQUE 66
4.1 Portabilité
Un premier élément nécessaire à l’intégration d’une nouvelle bibliothèque dans des systèmesmulti-agents existants est sa portabilité sur plusieurs systèmes d’exploitation. De nombreux cher-cheurs utilisent en effet différents systèmes d’exploitation pour réaliser leurs simulations, commel’illustre la portabilité de plates-formes multi-agents telles que Repast, Madkit ou NetLogo.
Une nouvelle bibliothèque doit également être portable en termes d’utilisation, en se basant surles langages de programmation largement utilisés dans le domaine. Si C, C++ et Java sont présentsparmi les plates-formes multi-agents décrites dans notre contexte, c’est surtout ce dernier langagequi est utilisé par de nombreuses plates-formes comme NetLogo, JADE, MadKit ou D-MASON.Cette large utilisation s’explique par plusieurs avantages associés à l’environnement Java :
— La portabilité des programmes sans recompilation. Il est ainsi possible de distribuer uneseule version de la plate-forme pour tous les systèmes d’exploitations supportés.
— La disponibilité d’une bibliothèque graphique intégrée, Swing. Cette bibliothèque facilitela réalisation de plates-formes interactives sans dépendances ou binaires externes.
— La possibilité de programmer en objet, de manière à représenter de manière intuitive lesdifférentes entités du modèle agent.
— La disponibilité de nombreux mécanismes d’exécution (threads) ou de communication(RMI, JMS) et de nombreuses structures de données dynamiques directement dans la bi-bliothèque standard.
— Une gestion de la mémoire automatique, qui facilite à la fois le développement de la plate-forme de simulation et des modèles multi-agents.
— La disponibilité de bibliothèques de gestion de données géographiques comme GIS, per-mettant un import aisé d’informations externes dans la simulation.
Il est toutefois nécessaire de coupler Java à des couches d’adaptation native comme JOCLpour permettre l’accès au modèle d’exécution GPU. Le choix du modèle de programmation utiliséest également un élément de cette portabilité d’utilisation : si CUDA et OpenCL sont tous deuxdisponibles sur de nombreux systèmes d’exploitations, OpenCL offre un plus grand choix de péri-phériques d’exécution CPU ou many-cores que CUDA, qui reste limité à l’utilisation de matérielsNvidia. Au vu de cette large disponibilité, le choix d’OpenCL paraît naturel pour notre solution,en gardant toutefois à l’esprit que chaque architecture d’exécution ne fournira pas forcément lesmêmes performances pour les mêmes programmes.
4.2 Réutilisation d’algorithmes et de structures
Comme évoqué au début de notre problématique, l’utilisation directe de modèles de program-mation tels que OpenCL et CUDA pour l’adaptation d’un système multi-agents impose le redé-veloppement par le concepteur de l’ensemble de ses traitements et de ses structures de données.Ce développement requiert des connaissances poussées en programmation C ou C++ et un travailimportant en termes d’adaptation de l’exécution et des structures de données.
Mené correctement, ce type d’adaptation permet d’obtenir une solution optimisée, au plusproche des contraintes des données et des algorithmes utilisés par le modèle source. Cette so-lution encourage toutefois, en imposant leur développement, l’utilisation de structures spécifiquesà chaque modèle adapté et difficilement réutilisables. Elle représente également un coût en tempsimportant devant être réinvesti à l’adaptation de chaque nouveau modèle. Dans ces circonstances,l’intérêt d’une bibliothèque est de permettre et favoriser la réutilisation d’algorithmes et de struc-

CHAPITRE 4. PROBLÉMATIQUE 67
tures de données.
Cette réutilisation peut être grandement facilitée en fournissant des implémentations optimi-sées des traitements multi-agents les plus courants, prêtes à être employées par le modèle agent.L’objectif de cette démarche est de proposer, à l’image de bibliothèques comme CUBLAS, desfonctions de haut-niveau déjà adaptées aux principales problématiques rencontrées dans les sys-tèmes multi-agents. Ces problématiques peuvent aussi bien concerner la mise à jour de l’environ-nement que le calcul de distances entre agents, la génération de nombres aléatoires ou encore leregroupement des données à chaque pas d’exécution, de manière à pouvoir observer la dynamiquedu modèle.
4.3 Intégration avec l’existant
De nombreuses plates-formes multi-agents ont pour objectif d’être une solution "tout en un"aux problèmes de modélisation du chercheur. Elles comprennent dans cette optique de nombreusesfonctionnalités annexes de conception et d’édition de modèle, d’affichage de l’environnement si-mulé ou de courbes représentant l’évolution du modèle, ou de production de fichiers résultats.
Une solution pour les GPU visant à remplacer totalement ces plates-formes impliquerait d’in-tégrer toutes ces fonctionnalités avant de constituer une alternative crédible, et représenterait unenouvelle solution concurrente, ce qui n’est pas l’objectif de notre contribution.
La bibliothèque doit donc être capable de s’intégrer dans ces plates-formes à plusieurs niveauxd’encapsulation du modèle. Elle ne doit notamment pas imposer un paradigme d’exécution parti-culier, de manière à ne pas entrer en conflit avec le fonctionnement de la simulation. Cette transpa-rence est également importante pour permettre son utilisation dans des plates-formes n’employantpas directement le langage Java, au moyen de modules additionnels (plugins) ou d’extension de lasyntaxe agent proposée. Pour décharger totalement le modèle de la gestion de cette bibliothèque,il est possible d’envisager son intégration sous la forme d’agents services fournissant l’accès à desservices implémentés sur GPU au reste du modèle.
4.4 Extensibilité
La simulation orientée agent est un domaine en perpétuelle évolution, tant au niveau concep-tuel, dans le domaine par exemple de l’intelligence artificielle, qu’en termes d’implémentation,avec l’arrivée de nouvelles architectures matérielles et de nouveaux modèles de programmation.Ce dynamisme et cette flexibilité expliquent la popularité de cette approche de modélisation pourla résolution de nombreux problèmes, mais soulignent également l’importance de proposer dessolutions modulaires et si possible génériques. Les avantages de cette modularité sont illustrés parle succès des nombreuses plates-formes agents traditionnelles, fournissant un vaste ensemble defonctionnalités indépendantes pouvant être ou non exploitées par un modèle particulier : c’est ainsile cas de plates-formes comme D-MASON ou NetLogo [Skl11], qui proposent un découpage desstructures de données implicite, de JADE, avec la possibilité d’ajouter de nouveaux composantsde manière dynamique au système, ou encore de MadKit qui permet la surcharge de nombreuxcomportements de la plate-forme. La généricité est également présente dans ces plates-formessous forme de cadre de modélisation et d’opérations facilitant la conception de nouveaux modèlesagents. Ce cadre peut être très souple, dans le cas par exemple de Madkit, ou beaucoup plus strict,dans le cas des plates-formes FLAME ou FLAME-GPU.

CHAPITRE 4. PROBLÉMATIQUE 68
Notre solution doit donc, au-delà de la flexibilité d’utilisation, permettre l’ajout aisé de fonc-tionnalités et d’extensions sans remettre en cause son architecture fondamentale, de manière àpouvoir traiter de nouveaux problèmes agents sur GPU.
4.5 Synthèse
Dans notre présentation du contexte, nous avons eu l’occasion d’évoquer le besoin en res-sources toujours plus important rencontré par les simulations en général et en particulier par lessimulations multi-agents. S’il est en effet courant de commencer par valider un système à petiteséchelles, l’observation de certains comportements émergents requiert parfois un nombre minimald’individus [SN09]. L’amélioration des résultats obtenus par la simulation agent implique, de ma-nière plus générale, une augmentation en taille des modèles, que ce soit en termes de dimensionde l’environnement ou de nombres d’agents, et des comportements toujours plus complexes.
La parallélisation de l’exécution en mémoire partagée ou en mémoire distribuée est une réponseà ce besoin toujours croissant en ressources mémoires et de calcul. Les architectures many-coreet GPU en particulier offrent l’accès à plusieurs centaines de coeurs d’exécution à des tarifs com-parables à ceux d’une machine de bureau, via des modèles de programmation comme CUDA etOpenCL.
L’utilisation de ces architectures pour la simulation multi-agents n’est pas une idée nouvelleet a déjà été explorée pour de nombreux modèles, sous forme de développement de nouvellesimplémentations complètes. Ces adaptations requièrent cependant une connaissance approfondiedes modèles de programmation et d’exécution GPU pour permettre l’obtention de programmesefficaces. De nombreux concepteurs agents, théoriciens, n’ont pas le temps d’acquérir ces compé-tences pour la réalisation de nouveaux modèles.
FLAME-GPU permet, a contrario, la génération de modèles agents basés sur CUDA sansconnaissance de ce modèle de programmation à partir de modèles FLAME. Cette solution im-pose cependant l’utilisation du formalisme strict de cette plate-forme, et n’est donc pas accessibleà des modèles basés sur d’autres plates-formes agents parallèles ou séquentielles telles que Madkit,NetLogo ou GAMA sans un redéveloppement complet.
Notre thèse est de montrer qu’une bibliothèque de ce type peut être développée de manière in-dépendante et générique par rapport à ces plates-formes d’exécution multi-agents, pour permettreson utilisation dans un large nombre d’environnements et de modèles existants.
Dans la suite de ce mémoire, nous présentons la démarche qui nous a mené à la conceptionde MCMAS, une bibliothèque permettant de réaliser tout ou partie d’une simulation multi-agentssur GPU. L’objectif de cette bibliothèque est de permettre une utilisation de cette nouvelle archi-tecture d’exécution de manière indépendante ou en complément de plates-formes de conceptionet d’exécution multi-agents existantes. Elle reprend en compte, pour cela, les problématiques deportabilité, de réutilisation, d’intégration et d’extensibilité évoquées dans ce chapitre dans un toutcohérent, proposant deux niveaux d’utilisation, l’un adapté à son utilisation sans connaissancesGPU, l’autre à une extension aisée des fonctionnalités offertes par la bibliothèque.
5Adaptation d’un modele multi-agents sur
GPU : Proie-Predateur
Le modèle proie-prédateur est un modèle multi-agents inclus à titre de démonstration dans detrès nombreuses plates-formes agents. Il présente l’intérêt d’offrir un grand choix de niveaux dereprésentation, mais également de nombreuses implémentations possibles. Dans ce chapitre, nousl’utilisons comme illustration des types de problématiques agents devant être traitées pour uneadaptation sur GPU, tant en termes de mémoire que d’exécution.
5.1 Présentation du modèle
Le modèle proie-prédateur a été pour la première fois décrit de manière indépendante par AlfredJames Lotka en 1925 et par Vito Volterra en 1926 sous la forme d’un couple d’équations différen-tielles. Ces équations, basées sur des observations effectuées au 19me siècle sur des populationsd’animaux sauvages, permettent d’estimer l’évolution en fonction du temps de deux populations,carnivore et herbivore, en fonction des paramètres définis pour la simulation du modèle :
dx(t)dt
= x(t)(α − βy(t))dy(t)
dt= −y(t)(δ − γx(t))
où
— t est le temps ;— x(t) est le nombre de proies en fonction du temps ;— y(t) est le nombre des prédateurs en fonction du temps ;— les dérivées dx(t)/dt et dy(t)/dt représentent la variation des populations au cours du temps.
Les paramètres suivants décrivent les interactions entre les deux espèces :
— α le taux de reproduction des proies ;— β le taux de mortalité des proies dû aux prédateurs ;— γ le taux de mortalité des prédateurs ;— δ le taux de reproduction des prédateurs.
Pour des paramètres d’entrée évitant la disparition totale de l’une ou l’autre des populations,l’évolution du nombre d’individus de chaque type tend alors rapidement à osciller de manièrerégulière entre périodes de faste et de famine. La Figure 5.1 illustre ces oscillations dans le temps.

CHAPITRE 5. ADAPTATION D’UN MODÈLE MULTI-AGENTS SUR GPU : PROIE-PRÉDATEUR 70
α = 2β = 0.5γ = 0.2δ = 6
0 20 40 60 80 100
05
10
15
20
Temps
No
mb
re d
'ind
ivid
us
Proies
Prédateurs
Figure 5.1 – Exemple de courbes obtenues par l’application des équations de Lotka-Volterra
Cette première approche, mathématique, ne considère que les nombres d’individus du modèleet des paramètres synthétisant leur évolution générale. Une autre approche de modélisation, orien-tée agent, reproduit ces tendances en décrivant le comportement des individus mis en présence aumoyen d’actions élémentaires de bas niveau décrites sous forme d’algorithme.
Une approche agent possible est ainsi d’isoler trois niveaux d’évolution dans le modèle proie-prédateur :
— L’environnement, modélisant les ressources consommées par les proies (végétation). Ils’agit d’un agent passif, modifié par les autres agents du système. Le seul traitement proprelui étant associé est l’augmentation des ressources d’un facteur fixé entre chaque pas desimulation, de manière à refléter la croissance et le remplacement des végétaux dans letemps.
— Les proies, capables de se déplacer et de se reproduire. Lors de ce second processus, laproie modifie l’environnement, pour répercuter la nourriture consommée.
— Les prédateurs, capables de se déplacer, de consommer des proies et de se reproduire. Cesagents n’interviennent que sur les proies, et ne modifient pas directement l’environnement.
L’ajout d’un environnement basé sur les ressources en végétation s’inscrit dans l’optique dedécrire le système selon une approche montante, comme nous l’avons vu dans notre présentationdes approches de modélisation, plutôt que de se baser sur une observation de haut niveau pourextrapoler le comportement de chaque individu, avec une approche descendante.
Ce modèle agent se caractérise par une relation stricte entre les populations, à sens unique.Seuls les prédateurs sont à même d’influer sur les proies, qui sont seules à pouvoir influer surl’environnement. Par rapport à la modélisation mathématique du modèle proie-prédateur, cette re-
CHAPITRE 5. ADAPTATION D’UN MODÈLE MULTI-AGENTS SUR GPU : PROIE-PRÉDATEUR 71
présentation agent introduit aussi une prise en compte de l’accès aux ressources de chaque agent,en introduisant une répartition géographique des différentes entités du système. Cet aspect sup-plémentaire permet non seulement d’obtenir des valeurs de population, comme le modèle mathé-matique, mais ouvre également l’accès à des résultats plus précis, permettant de mettre en avantl’influence de la répartition des ressources sur la position des agents dans l’environnement.
5.2 Stratégies de déplacement
Un facteur important de l’évolution du système proie-prédateur est l’algorithme de déplace-ment utilisé. Cet algorithme détermine en effet non seulement la manière dont chaque agent consi-dérera les données de son voisinage, mais également le nombre de branchements et la régularitédu nombre d’opérations à effectuer, pour un bon remplissage des ressources GPU.
5.2.1 Déplacement aléatoire
Une première implémentation du déplacement des proies et prédateurs est la sélection d’unedestination aléatoire à chaque itération. Cette approche évite le parcours du voisinage de chaqueagent pour la recherche d’une cible, et donc de nombreux accès mémoire, mais est peu intéressanteà implémenter en termes de modèle et d’adaptation GPU :
— En termes de modélisation, elle est très peu cohérente avec le comportement de nombreusesespèces animales capables de détecter et poursuivre des proies. Elle minimise égalementartificiellement la population pouvant être supportée par le modèle, en ne laissant qu’unechance minime, en fonction de la densité des ressources dans l’environnement, à chaqueindividu de disposer des ressources nécessaires à sa survie.
— En termes d’adaptation sur GPU, ce comportement réduit la démarche de chaque individuau simple tirage aléatoire d’un jeu de coordonnées. Ce tirage rend inutile tout parcoursde données sur GPU, et ne requiert plus qu’une gestion des conflits et la génération denombres aléatoires. Ces deux processus sont difficiles à réaliser sans rendre partiellementséquentiels les deux traitements, ce qui limite l’intérêt des centaines de coeurs offerts parl’architecture.
Cette stratégie de déplacement aléatoire est surtout utilisée pour valider le fonctionnementd’une nouvelle simulation.
5.2.2 Proie la plus proche
Cette seconde stratégie implique un parcours pour chaque individu de l’ensemble des cases dumodèle qui sont à sa portée, suivi par un déplacement sur la position de la proie la plus proche. Ellerequiert un grand nombre d’accès mémoires pour évaluer toutes les cases destinations possibles,ainsi qu’une notion de priorité entre ces cases : une case proche contenant une proie doit êtrepréférée à une autre case solution plus éloignée.
Une manière d’éviter le calcul de la distance de chaque proie est d’effectuer le parcours descases voisines sous forme d’une spirale comme illustré par la Figure 5.2. Ce parcours en spiralepermet non seulement de garantir que les proies seront automatiquement considérées par ordred’éloignement, mais offre également l’avantage de pouvoir arrêter l’évaluation à la première proiedétectée (court-circuit).
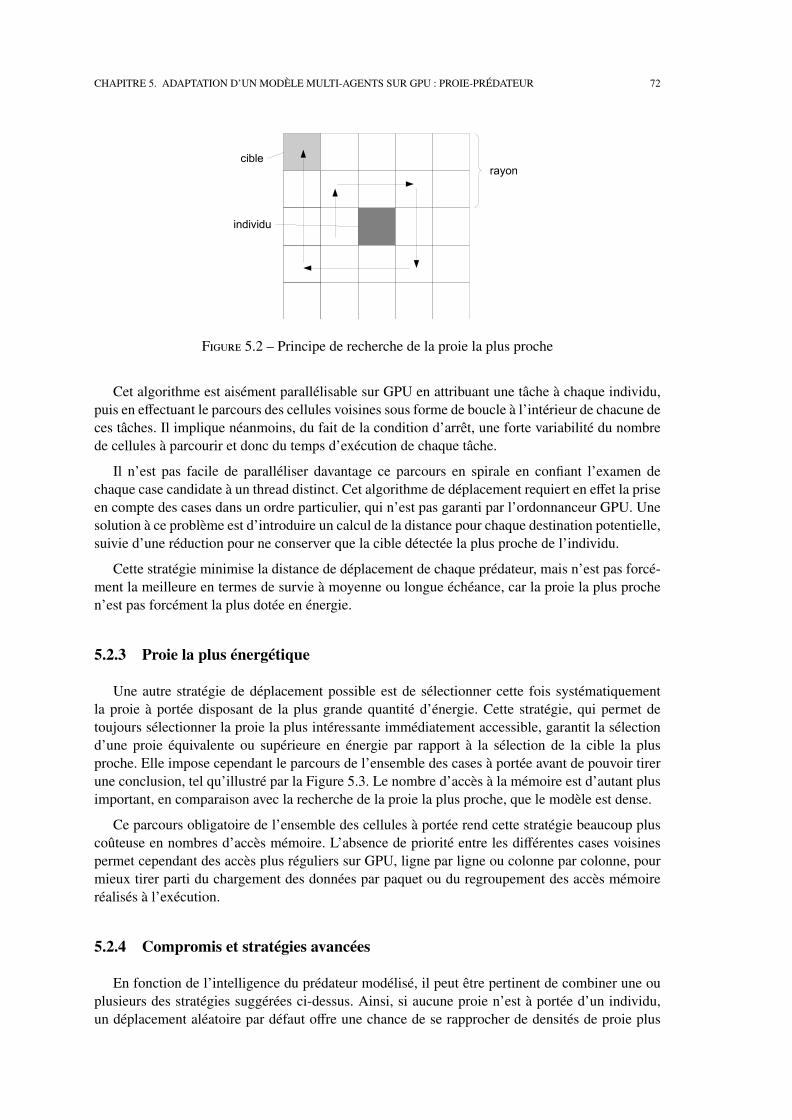
CHAPITRE 5. ADAPTATION D’UN MODÈLE MULTI-AGENTS SUR GPU : PROIE-PRÉDATEUR 72
individu
ciblerayon
Figure 5.2 – Principe de recherche de la proie la plus proche
Cet algorithme est aisément parallélisable sur GPU en attribuant une tâche à chaque individu,puis en effectuant le parcours des cellules voisines sous forme de boucle à l’intérieur de chacune deces tâches. Il implique néanmoins, du fait de la condition d’arrêt, une forte variabilité du nombrede cellules à parcourir et donc du temps d’exécution de chaque tâche.
Il n’est pas facile de paralléliser davantage ce parcours en spirale en confiant l’examen dechaque case candidate à un thread distinct. Cet algorithme de déplacement requiert en effet la priseen compte des cases dans un ordre particulier, qui n’est pas garanti par l’ordonnanceur GPU. Unesolution à ce problème est d’introduire un calcul de la distance pour chaque destination potentielle,suivie d’une réduction pour ne conserver que la cible détectée la plus proche de l’individu.
Cette stratégie minimise la distance de déplacement de chaque prédateur, mais n’est pas forcé-ment la meilleure en termes de survie à moyenne ou longue échéance, car la proie la plus prochen’est pas forcément la plus dotée en énergie.
5.2.3 Proie la plus énergétique
Une autre stratégie de déplacement possible est de sélectionner cette fois systématiquementla proie à portée disposant de la plus grande quantité d’énergie. Cette stratégie, qui permet detoujours sélectionner la proie la plus intéressante immédiatement accessible, garantit la sélectiond’une proie équivalente ou supérieure en énergie par rapport à la sélection de la cible la plusproche. Elle impose cependant le parcours de l’ensemble des cases à portée avant de pouvoir tirerune conclusion, tel qu’illustré par la Figure 5.3. Le nombre d’accès à la mémoire est d’autant plusimportant, en comparaison avec la recherche de la proie la plus proche, que le modèle est dense.
Ce parcours obligatoire de l’ensemble des cellules à portée rend cette stratégie beaucoup pluscoûteuse en nombres d’accès mémoire. L’absence de priorité entre les différentes cases voisinespermet cependant des accès plus réguliers sur GPU, ligne par ligne ou colonne par colonne, pourmieux tirer parti du chargement des données par paquet ou du regroupement des accès mémoireréalisés à l’exécution.
5.2.4 Compromis et stratégies avancées
En fonction de l’intelligence du prédateur modélisé, il peut être pertinent de combiner une ouplusieurs des stratégies suggérées ci-dessus. Ainsi, si aucune proie n’est à portée d’un individu,un déplacement aléatoire par défaut offre une chance de se rapprocher de densités de proie plus
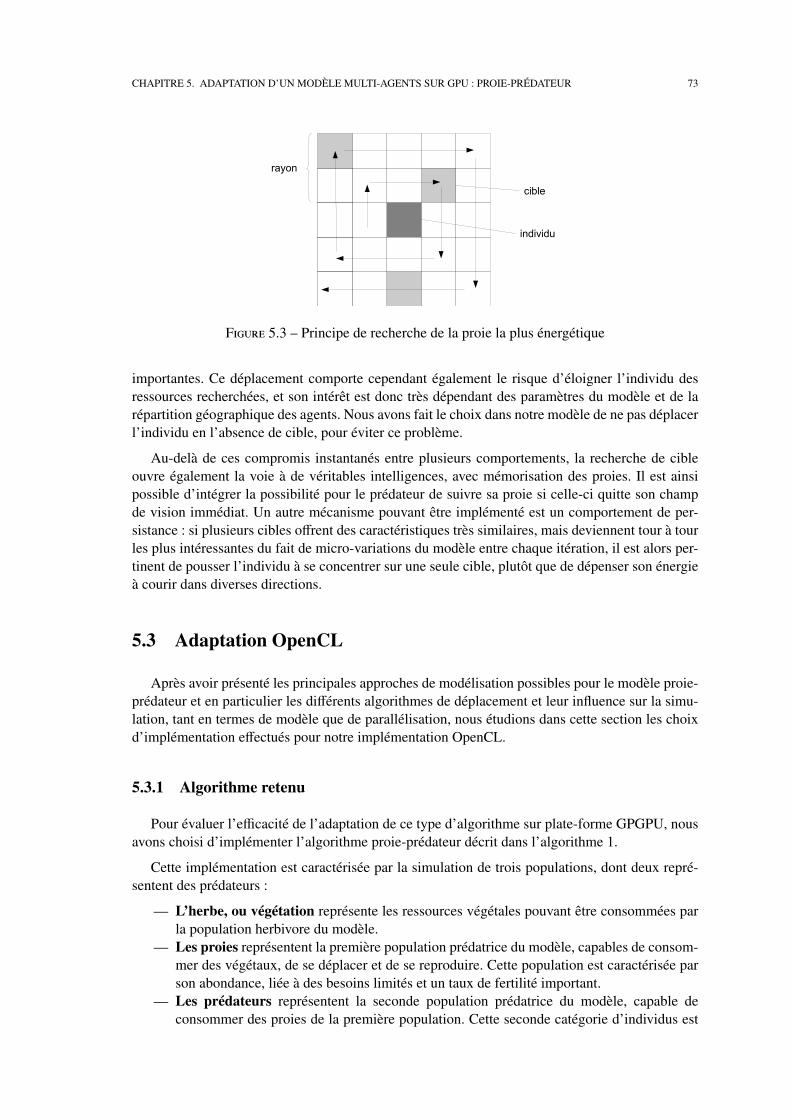
CHAPITRE 5. ADAPTATION D’UN MODÈLE MULTI-AGENTS SUR GPU : PROIE-PRÉDATEUR 73
individu
cible
rayon
Figure 5.3 – Principe de recherche de la proie la plus énergétique
importantes. Ce déplacement comporte cependant également le risque d’éloigner l’individu desressources recherchées, et son intérêt est donc très dépendant des paramètres du modèle et de larépartition géographique des agents. Nous avons fait le choix dans notre modèle de ne pas déplacerl’individu en l’absence de cible, pour éviter ce problème.
Au-delà de ces compromis instantanés entre plusieurs comportements, la recherche de cibleouvre également la voie à de véritables intelligences, avec mémorisation des proies. Il est ainsipossible d’intégrer la possibilité pour le prédateur de suivre sa proie si celle-ci quitte son champde vision immédiat. Un autre mécanisme pouvant être implémenté est un comportement de per-sistance : si plusieurs cibles offrent des caractéristiques très similaires, mais deviennent tour à tourles plus intéressantes du fait de micro-variations du modèle entre chaque itération, il est alors per-tinent de pousser l’individu à se concentrer sur une seule cible, plutôt que de dépenser son énergieà courir dans diverses directions.
5.3 Adaptation OpenCL
Après avoir présenté les principales approches de modélisation possibles pour le modèle proie-prédateur et en particulier les différents algorithmes de déplacement et leur influence sur la simu-lation, tant en termes de modèle que de parallélisation, nous étudions dans cette section les choixd’implémentation effectués pour notre implémentation OpenCL.
5.3.1 Algorithme retenu
Pour évaluer l’efficacité de l’adaptation de ce type d’algorithme sur plate-forme GPGPU, nousavons choisi d’implémenter l’algorithme proie-prédateur décrit dans l’algorithme 1.
Cette implémentation est caractérisée par la simulation de trois populations, dont deux repré-sentent des prédateurs :
— L’herbe, ou végétation représente les ressources végétales pouvant être consommées parla population herbivore du modèle.
— Les proies représentent la première population prédatrice du modèle, capables de consom-mer des végétaux, de se déplacer et de se reproduire. Cette population est caractérisée parson abondance, liée à des besoins limités et un taux de fertilité important.
— Les prédateurs représentent la seconde population prédatrice du modèle, capable deconsommer des proies de la première population. Cette seconde catégorie d’individus est
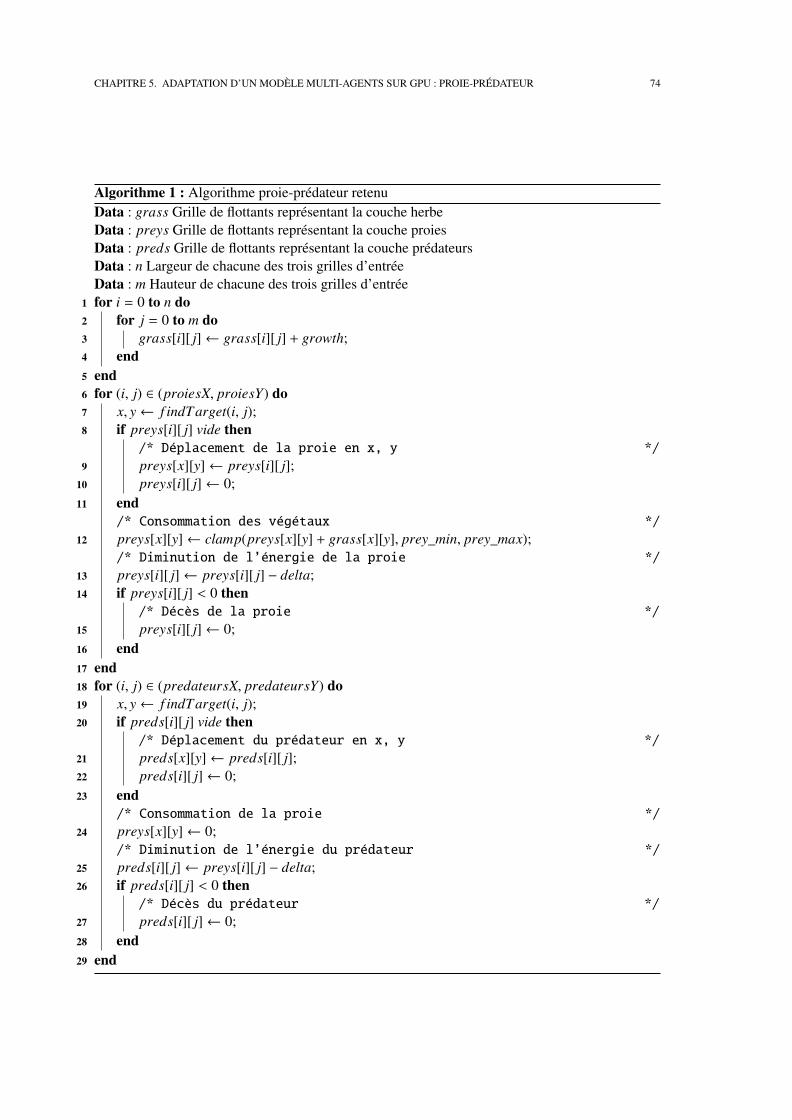
CHAPITRE 5. ADAPTATION D’UN MODÈLE MULTI-AGENTS SUR GPU : PROIE-PRÉDATEUR 74
Algorithme 1 : Algorithme proie-prédateur retenuData : grass Grille de flottants représentant la couche herbeData : preys Grille de flottants représentant la couche proiesData : preds Grille de flottants représentant la couche prédateursData : n Largeur de chacune des trois grilles d’entréeData : m Hauteur de chacune des trois grilles d’entrée
1 for i = 0 to n do2 for j = 0 to m do3 grass[i][ j]← grass[i][ j] + growth;4 end5 end6 for (i, j) ∈ (proiesX, proiesY) do7 x, y← f indTarget(i, j);8 if preys[i][ j] vide then
/* Déplacement de la proie en x, y */
9 preys[x][y]← preys[i][ j];10 preys[i][ j]← 0;11 end
/* Consommation des végétaux */
12 preys[x][y]← clamp(preys[x][y] + grass[x][y], prey_min, prey_max);/* Diminution de l’énergie de la proie */
13 preys[i][ j]← preys[i][ j] − delta;14 if preys[i][ j] < 0 then
/* Décès de la proie */
15 preys[i][ j]← 0;16 end17 end18 for (i, j) ∈ (predateursX, predateursY) do19 x, y← f indTarget(i, j);20 if preds[i][ j] vide then
/* Déplacement du prédateur en x, y */
21 preds[x][y]← preds[i][ j];22 preds[i][ j]← 0;23 end
/* Consommation de la proie */
24 preys[x][y]← 0;/* Diminution de l’énergie du prédateur */
25 preds[i][ j]← preys[i][ j] − delta;26 if preds[i][ j] < 0 then
/* Décès du prédateur */
27 preds[i][ j]← 0;28 end29 end

CHAPITRE 5. ADAPTATION D’UN MODÈLE MULTI-AGENTS SUR GPU : PROIE-PRÉDATEUR 75
associée à des besoins plus importants, et un taux de fertilité relativement plus faible.
Cet algorithme pose plusieurs problèmes de parallélisation :
— L’évolution de chaque population dépend des mises à jour des populations précédentes.— Plusieurs individus d’une même population peuvent tenter de se déplacer au même endroit.— L’algorithme repose sur le parcours des positions des proies et des prédateurs. Cette liste
de positions doit être mise à jour au fur et à mesure de la disparition et de l’apparition denouveaux individus.
5.3.2 Représentation mémoire
Dans notre implémentation OpenCL, nous avons fait le choix de représenter les données glo-bales du modèle sous la forme d’une unique structure mémoire accessible en lecture seule à toutesles tâches GPU. Ces informations comprennent l’ensemble des données d’entrée de la simulation :taux de métabolisme et de croissance des ressources végétales, énergie minimale et maximale pourchaque individu...
Chaque population est stockée sous forme de grille à deux dimensions (Figure 5.4). Toutes cesgrilles font la même taille, et peuvent être considérées comme une vision particulière de l’espacede simulation. La présence d’un agent est indiquée par une énergie strictement positive dans unecellule, et l’absence d’individu correspond à une valeur d’énergie négative ou nulle.
Prédateurs
Proies
Végétation
Figure 5.4 – Stockage retenu pour les populations et les niveaux d’énergie du modèle proie-prédateur
Pour éviter un parcours complet de chaque grille pour localiser les individus, quatre tableauxstatiques indiquant la position des agents proies et prédateurs du modèle sont également spécifiésen paramètres des traitements de mise à jour et de déplacement :
— Un tableau comprenant les positions en x des proies.— Un tableau comprenant les positions en y des proies.— Un tableau comprenant les positions en x des prédateurs.— Un tableau comprenant les positions en y des prédateurs.
Ces tableaux de positions sont mis à jour par le CPU entre chaque itération de la simulationpour prendre en compte l’apparition de nouveaux individus ou les décès d’agents existants. Cettemise à jour sur le processeur hôte permet d’éviter toute problématique de réallocation mémoirenon supportée sur GPU.
CHAPITRE 5. ADAPTATION D’UN MODÈLE MULTI-AGENTS SUR GPU : PROIE-PRÉDATEUR 76
5.3.3 Extraction de sections parallèles
Il est possible de paralléliser le modèle proie-prédateur de deux manières sur GPU :
— Soit en réalisant l’ensemble de la simulation sur GPU.— Soit en n’intervenant que sur les traitements coûteux et parallélisables.
La première approche implique de gérer la totalité des problèmes de parallélisation posés par lemodèle en OpenCL, et en particulier la gestion des structures de données dynamiques comprenantles positions des proies. Elle implique également le traitement de populations agents très diversesen nombre, qu’il s’agisse de l’herbe, des proies, ou des prédateurs. Cette diversité impose soit uneréalisation de la simulation en plusieurs lancements OpenCL, soit une occupation très disparatedes threads d’exécution lancés sur la carte graphique aux différents stades de l’exécution.
Nous avons donc fait le choix de privilégier la seconde approche, où la simulation est au départintégralement réalisée sur CPU, pour en adapter ensuite un ou plusieurs traitements sur GPU. Dansce cas, un point central de l’adaptation est de sélectionner les portions du programme à même debénéficier d’une parallélisation sans modification fondamentale de l’algorithme. Cette sélection estfavorisée par l’existence dans le modèle d’opération de transformation ou de réductions analoguesà celles proposées par des bibliothèques telles que BLAS ou MPI. C’est en particulier le cas del’opération de mise à jour des ressources végétales, qui correspond à l’application d’une mêmefonction mathématique à chaque cellule de l’environnement, et le cas de la réduction de la quantitéd’énergie présente dans le modèle.
Dans l’algorithme décrit, trois traitements semblent de bons candidats à une telle extraction :
— La mise à jour des ressources végétales. L’application d’une transformation mathéma-tique simple à chaque cellule, sans dépendance sur ses voisines, permet l’utilisation d’unetâche OpenCL pour la mise à jour de chaque cellule. L’absence de synchronisation permetainsi de tirer aisément parti du grand nombre de coeurs du GPU. Le coût de cette sectionest également directement proportionnel à la taille de l’environnement de simulation, plu-tôt qu’au nombre d’individus présents dans le modèle, ce qui garantit un temps de calculimportant et aisément prévisible en connaissant les dimensions du modèle d’entrée. Cetteopération revient à l’application d’une même fonction mathématique à chaque cellule del’environnement.
— La recherche des nouvelles positions pour chaque individu. Si la gestion des individusest malaisée à implémenter de manière intégrale sur GPU, du fait de l’apparition ou dela disparitions des agents, ou des nombreuses conditions rencontrées dans l’algorithme, larecherche de cibles de déplacement implique le parcours d’un nombre de cellules d’autantplus important que le nombre et la portée de chaque agent augmentent. Réaliser ce calculsur GPU permet le parcours de cellules en parallèle pour chaque position d’individu dumodèle, et laisse ensuite la possibilité au CPU d’intervenir au niveau de la prise en comptede cette valeur brute, en l’ignorant ou l’adaptant si nécessaire.
— Totalisation des quantités d’énergie présentes dans le modèle. Le choix de représenta-tion de chaque population dans une grille spécialisée, enfin, permet aisément d’effectuerla somme des valeurs de l’ensemble des cellules de la grille pour obtenir l’énergie totaleà une itération donnée représentée sous forme de végétaux, de proies ou de prédateurs.Ce traitement revient à une forme de réduction cas de la quantité d’énergie présente danschaque grille du modèle.
CHAPITRE 5. ADAPTATION D’UN MODÈLE MULTI-AGENTS SUR GPU : PROIE-PRÉDATEUR 77
5.4 Synthèse
Dans ce chapitre, nous avons évoqué une parallélisation possible du modèle proie-prédateurreposant sur la délégation de certaines fonctions au GPU. La parallélisation d’une partie du modèleest motivée par deux observations :
— Certains traitements correspondent directement à des opérations déjà parallélisées par desbibliothèques telles que BLAS ou MPI. C’est en particulier le cas de l’opération de mise àjour des ressources végétales, qui revient à l’application de la même fonction mathématiqueà chaque cellule de l’environnement, et le cas de la réduction de la quantité d’énergieprésente dans le modèle.
— D’autres traitements, comme le déplacement, impliquent la réalisation d’un grand nombred’itérations de boucle pour chaque agent dans le modèle. Dans ce cas, cette opérationde recherche peut être parallélisée, de manière à permettre à tous les agents de consulterl’environnement simultanément.
Au vu de notre contexte et de cette première démarche de parallélisation d’un système multi-agents, il est maintenant possible de présenter les différentes approches pouvant être utilisées pourl’adaptation de ce type de système sur GPU.

6Methodes d’adaptation SMA sur GPU
Au vu de notre contexte et de notre démarche de parallélisation du modèle proie-prédateuren OpenCL, il est possible de dégager trois méthodes principales d’utilisation du GPU pour dessimulations multi-agents : l’adaptation de la totalité du modèle, la parallélisation de certaines opé-rations, ou le recours à des opérations parallélisées existantes.
La première approche, l’adaptation de la totalité du modèle, implique l’implémentation de l’en-semble de l’algorithme sur GPU par le concepteur. Dans ce cas, l’essentiel de la simulation utilisele langage et les structures de données OpenCL pour son exécution, et la gestion de l’allocation,de la copie et de la manipulation des structures de données est directement effectuée par le pro-gramme. Cette solution permet également un contrôle total de l’exécution par le programme.
La seconde approche, la parallélisation de certaines opérations seulement sur GPU, vise à maxi-miser le gain en performance obtenue tout en conservant une démarche de parallélisation incré-mentale. Cette approche partielle permet de conserver les aspects complexes de la simulation surle CPU, comme dans le cas de la gestion des listes de positions de chaque individu dans le mo-dèle proie-prédateur. Elle requiert elle aussi une expertise en programmation pour implémenterces opérations parallélisées.
La troisième approche, enfin, est de réutiliser des opérations de haut niveau déjà paralléliséessur GPU. Cette approche permet l’utilisation de la puissance des cartes graphiques dans une si-mulation multi-agents sans connaissance particulière de l’architecture. Elle implique toutefois dese conformer à l’interface de ces fonctions existantes en visant une certaine généricité des trai-tements. Dans le modèle proie-prédateur, il est ainsi intéressant de se ramener à des opérationsmatricielles, plutôt que d’effectuer le traitement de chaque case de manière indépendante.
Dans les sections suivantes, nous présentons dans un premier temps comment l’espace de si-mulation utilisé par le système multi-agents est susceptible d’orienter le choix du concepteur versl’une ou l’autre de ces approches. Nous évoquons ensuite, pour chacune de ces trois solutions, lescontraintes associées pour permettre une utilisation efficace de la parallélisation sur GPU.
6.1 Gestion de la dimension spatiale
L’algorithme d’évolution d’un système multi-agents ne fixe généralement pas de bornes parti-culières au nombre d’individus ou à la taille de l’environnement utilisé dans le modèle. Ces deuxparamètres sont déterminés par le scénario de la simulation.
Une connaissance même approximative de ces paramètres au moment de la conception d’unprogramme permet cependant au développeur de privilégier a priori certaines structures de don-nées. Le choix d’utiliser un dictionnaire se justifie ainsi pour indexer un grand nombre d’éléments,
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 80
mais s’avère au contraire pénalisant pour une très petite quantité de données, du fait des traitementssupplémentaires requis par la gestion de la structure.
Cette connaissance préalable est également importante dans le cadre de l’implémentation d’unsystème multi-agents : si certaines portions de l’algorithme présentent un coût constant, commel’initialisation des variables globales, d’autres sont directement liées à ces paramètres d’exécution.La mise à jour des agents peut ainsi présenter un coût linéaire par rapport au nombre d’agentsprésents dans le modèle. Au contraire, la recherche dans un voisinage dans un espace de simulationen deux dimensions représente un coût évoluant de manière quadratique.
Suivant les modèles, cette topologie spatiale est présente sous forme de structure de donnéesexplicite, dans le cas du modèle proie-prédateur, ou de manière plus abstraite. Ce second type estillustré par le graphe d’accessibilité utilisé pour le modèle MIOR plus loin dans ce mémoire.
Cette variation des coûts en fonction des paramètres d’entrée influence directement les perfor-mances obtenues par une implémentation particulière, et en particulier par une adaptation sur leGPU, en application de la loi d’Amdhal. Si les portions adaptées sur GPU sont parallélisables etdeviennent de plus en plus coûteuses avec l’augmentation du nombre d’agents ou de la taille del’espace de simulation, l’utilisation de cette plate-forme sera alors d’autant plus avantageuse enregard au CPU que ces deux paramètres augmentent. Au contraire, si le coût de ces portions pa-rallélisées reste constant ou très limité dans la plage de paramètres qui intéresse le chercheur, lesgains offerts par telle adaptation seront plus limités.
Dans toute expérimentation, il apparaît donc prometteur d’identifier les traitements dont le coûtaugmente rapidement en regard de l’espace de simulation du système, puis d’évaluer l’impact surles performances de ces traitements sur différentes tailles du système, si possible avec un facteurde mise à l’échelle assurant un comportement identique de la simulation.
6.2 Développement d’un modèle sur GPU
La première approche de parallélisation d’un système multi-agents sur GPU est de réaliser l’en-semble du modèle sur ce support. De nombreuses réalisations de ce type ont été présentées dansla section 3.3.1. Cette approche requiert toutefois la maîtrise du modèle de programmation GPU,ainsi que la gestion de nombreuses problématiques par le concepteur du modèle. Nous détaillonsces différentes problématiques dans la suite de cette section.
6.2.1 Implémentation des structures de données
OpenCL ne spécifie pas, en tant que standard basé sur le langage C, de structures telles que leslistes chaînées ou les grilles : les seules structures de données gérées directement par le langagesont les types primitifs, les structures et les tableaux statiques. Pour pouvoir adapter un modèlemulti-agents sur GPU, il est donc nécessaire de convertir toutes les structures décrites dans lemodèle en combinaison d’un ou plusieurs de ces types de données.
Cette restriction limite le modèle à l’utilisation de tableaux statiques à une dimension ou àdes structures spécifiques telles que les textures pour représenter les grilles souvent rencontréesdans les systèmes multi-agents. Cette conversion en structures de données implique des choix dereprésentation. La Figure 6.1 illustre ainsi deux manières possibles de représenter une matrice enOpenCL, sur la base d’une linéarisation ligne par ligne ou colonne par colonne. Chacune de ces al-ternatives est adaptée à un mode particulier d’accès aux données. La linéarisation par ligne permet
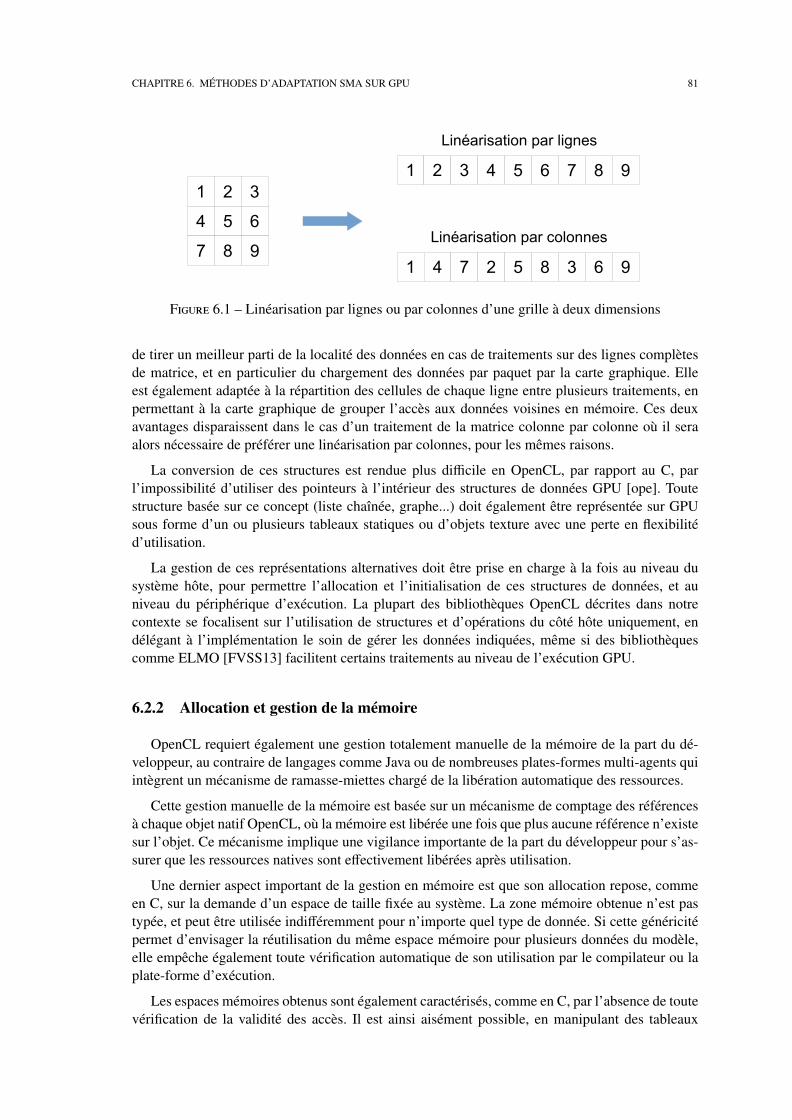
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 81
1 2 3
4 5 6
7 8 9
1 2 3 4 5 6 7 8 9
1 4 7 2 5 8 3 6 9
Linéarisation par lignes
Linéarisation par colonnes
Figure 6.1 – Linéarisation par lignes ou par colonnes d’une grille à deux dimensions
de tirer un meilleur parti de la localité des données en cas de traitements sur des lignes complètesde matrice, et en particulier du chargement des données par paquet par la carte graphique. Elleest également adaptée à la répartition des cellules de chaque ligne entre plusieurs traitements, enpermettant à la carte graphique de grouper l’accès aux données voisines en mémoire. Ces deuxavantages disparaissent dans le cas d’un traitement de la matrice colonne par colonne où il seraalors nécessaire de préférer une linéarisation par colonnes, pour les mêmes raisons.
La conversion de ces structures est rendue plus difficile en OpenCL, par rapport au C, parl’impossibilité d’utiliser des pointeurs à l’intérieur des structures de données GPU [ope]. Toutestructure basée sur ce concept (liste chaînée, graphe...) doit également être représentée sur GPUsous forme d’un ou plusieurs tableaux statiques ou d’objets texture avec une perte en flexibilitéd’utilisation.
La gestion de ces représentations alternatives doit être prise en charge à la fois au niveau dusystème hôte, pour permettre l’allocation et l’initialisation de ces structures de données, et auniveau du périphérique d’exécution. La plupart des bibliothèques OpenCL décrites dans notrecontexte se focalisent sur l’utilisation de structures et d’opérations du côté hôte uniquement, endélégant à l’implémentation le soin de gérer les données indiquées, même si des bibliothèquescomme ELMO [FVSS13] facilitent certains traitements au niveau de l’exécution GPU.
6.2.2 Allocation et gestion de la mémoire
OpenCL requiert également une gestion totalement manuelle de la mémoire de la part du dé-veloppeur, au contraire de langages comme Java ou de nombreuses plates-formes multi-agents quiintègrent un mécanisme de ramasse-miettes chargé de la libération automatique des ressources.
Cette gestion manuelle de la mémoire est basée sur un mécanisme de comptage des référencesà chaque objet natif OpenCL, où la mémoire est libérée une fois que plus aucune référence n’existesur l’objet. Ce mécanisme implique une vigilance importante de la part du développeur pour s’as-surer que les ressources natives sont effectivement libérées après utilisation.
Une dernier aspect important de la gestion en mémoire est que son allocation repose, commeen C, sur la demande d’un espace de taille fixée au système. La zone mémoire obtenue n’est pastypée, et peut être utilisée indifféremment pour n’importe quel type de donnée. Si cette généricitépermet d’envisager la réutilisation du même espace mémoire pour plusieurs données du modèle,elle empêche également toute vérification automatique de son utilisation par le compilateur ou laplate-forme d’exécution.
Les espaces mémoires obtenus sont également caractérisés, comme en C, par l’absence de toutevérification de la validité des accès. Il est ainsi aisément possible, en manipulant des tableaux
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 82
de données, d’écrire ou de lire à des adresses mémoires invalides. Ce type d’erreur n’est pasnécessairement détecté par la plate-forme d’exécution, et impose une grande vigilance dans l’accèsaux structures de données pour éviter de corrompre silencieusement les données de la simulation.
6.2.3 Gestion de l’exécution
Au-delà de la gestion de la représentation des données du modèle, la réalisation d’un modèlemulti-agents directement sur GPU pose la question de la granularité de parallélisation de l’exécu-tion et du type de distribution des données à retenir : est-il préférable d’effectuer la totalité de lasimulation en un seul lancement de kernel ? Vaut-il mieux, au contraire, découper l’exécution enplusieurs kernels correspondants à des données et des traitements différents ? Comment découperl’algorithme utilisé en threads ?
Granularité de parallélisation
La décomposition du traitement à effectuer en nombreux threads est un pré-requis importantpour une exécution efficace du nombre important de coeurs fournis par l’architecture matérielleGPU. L’exécution d’un agent à la fois n’a ainsi aucun intérêt si l’exécution de cet agent n’est pasparallélisable et coûteuse en soi, du fait des coûts de transfert, du faible taux d’occupation et destemps d’exécution obtenus.
Une manière d’assurer ce découpage est d’exécuter tous les agents du modèle de manière si-multanée (parallélisation "en largeur"), en associant chaque agent à un thread d’exécution. Unealternative est une parallélisation dite "en profondeur", dans laquelle chaque agent réalise un ouplusieurs calculs coûteux à même d’être largement parallélisés, de manière à justifier son exécutionindépendante sur GPU.
Le choix du nombre de kernels devant être utilisés pour la réalisation de la simulation dépendde plusieurs facteurs :
L’algorithme a un impact primordial sur le type de parallélisation retenue. Il peut être aisémentparallélisable, s’il s’agit par exemple d’un traitement indépendant sur chaque élément d’une grilled’entrée, ou au contraire imposer de nombreuses synchronisations entre agents. Si tous les threadsd’une exécution doivent conclure les mêmes opérations avant de pouvoir continuer l’exécutionde la simulation, des barrières d’exécution deviennent nécessaires. Le découpage en programmesdistincts est un autre moyen d’obtenir implicitement ce type de synchronisation.
Le nombre de threads (work-items) devant être lancés. Le nombre et l’organisation desthreads associés à un kernel sont fixés au niveau du lancement et ne peuvent pas être modifiés encours d’exécution. Si plusieurs populations d’agents de tailles variées, ou des structures de tailletrès variées, existent dans le modèle, il est préférable d’utiliser un découpage adapté à chaquepopulation, plutôt qu’un unique découpage peu adapté, de manière à maximiser l’utilisation desthreads lancés. Le lancement en un seul kernel d’une simulation proie-prédateur comprenant 2000proies et 100 prédateurs implique ainsi l’utilisation de 2000 works-items, si chaque population doitêtre traitée en parallèle. Si ce découpage est optimal en regard du nombre de proies, seuls 5% desthreads seront effectivement utilisés pour la simulation les prédateurs, ce qui induit une irrégularitéimportante en temps de traitement sur GPU.
Les dépendances de données. Le type des données manipulées et leur utilisation dans lesdifférentes phases de l’exécution ont également leur importance en termes de découpage. Ainsi,les objets textures ne sont accessibles qu’en lecture ou en écriture au sein d’un même lancement.
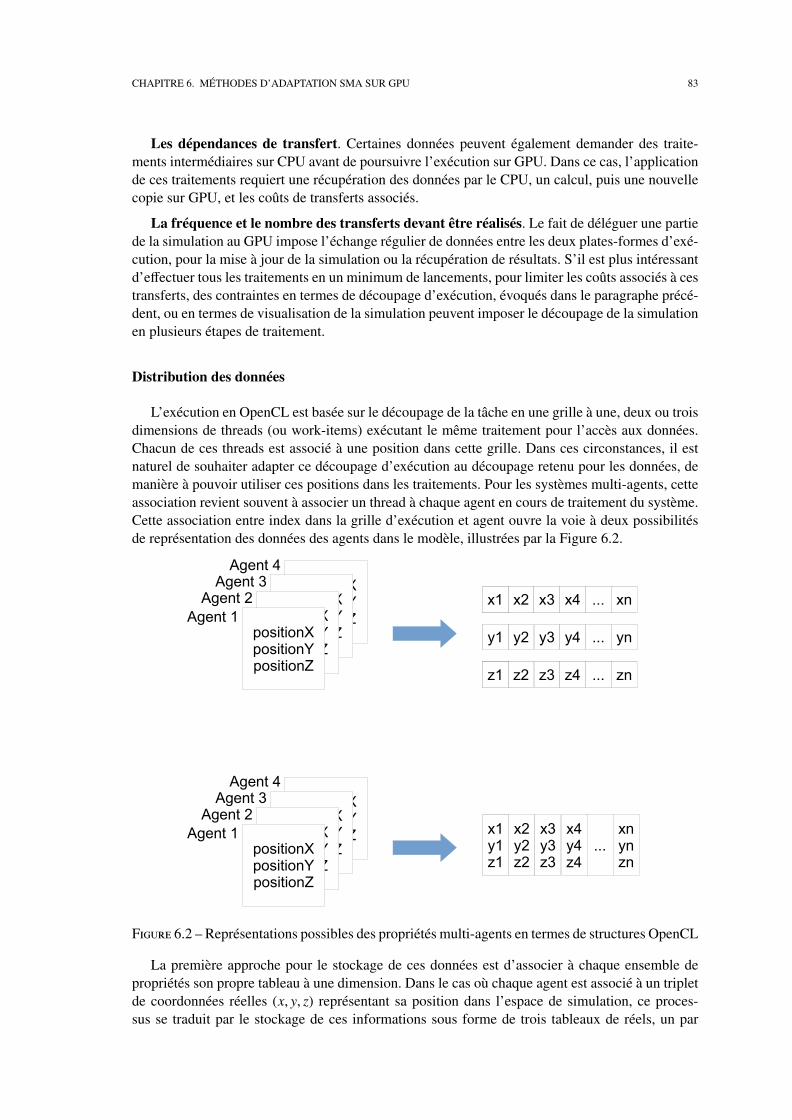
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 83
Les dépendances de transfert. Certaines données peuvent également demander des traite-ments intermédiaires sur CPU avant de poursuivre l’exécution sur GPU. Dans ce cas, l’applicationde ces traitements requiert une récupération des données par le CPU, un calcul, puis une nouvellecopie sur GPU, et les coûts de transferts associés.
La fréquence et le nombre des transferts devant être réalisés. Le fait de déléguer une partiede la simulation au GPU impose l’échange régulier de données entre les deux plates-formes d’exé-cution, pour la mise à jour de la simulation ou la récupération de résultats. S’il est plus intéressantd’effectuer tous les traitements en un minimum de lancements, pour limiter les coûts associés à cestransferts, des contraintes en termes de découpage d’exécution, évoqués dans le paragraphe précé-dent, ou en termes de visualisation de la simulation peuvent imposer le découpage de la simulationen plusieurs étapes de traitement.
Distribution des données
L’exécution en OpenCL est basée sur le découpage de la tâche en une grille à une, deux ou troisdimensions de threads (ou work-items) exécutant le même traitement pour l’accès aux données.Chacun de ces threads est associé à une position dans cette grille. Dans ces circonstances, il estnaturel de souhaiter adapter ce découpage d’exécution au découpage retenu pour les données, demanière à pouvoir utiliser ces positions dans les traitements. Pour les systèmes multi-agents, cetteassociation revient souvent à associer un thread à chaque agent en cours de traitement du système.Cette association entre index dans la grille d’exécution et agent ouvre la voie à deux possibilitésde représentation des données des agents dans le modèle, illustrées par la Figure 6.2.
positionXpositionYpositionZ
positionXpositionYpositionZ
positionXpositionYpositionZ
positionXpositionYpositionZ
x2 x3 x4 ... xnx1
xyz
x2y2z2
x3y3z3
...xnynzn
x1y1z1
y2 y3 y4 ... yny1
z2 z3 z4 ... znz1
x4y4z4
Agent 1
Agent 2Agent 3
Agent 4
positionXpositionYpositionZ
positionXpositionYpositionZ
positionXpositionYpositionZ
positionXpositionYpositionZ
Agent 1
Agent 2Agent 3
Agent 4
Figure 6.2 – Représentations possibles des propriétés multi-agents en termes de structures OpenCL
La première approche pour le stockage de ces données est d’associer à chaque ensemble depropriétés son propre tableau à une dimension. Dans le cas où chaque agent est associé à un tripletde coordonnées réelles (x, y, z) représentant sa position dans l’espace de simulation, ce proces-sus se traduit par le stockage de ces informations sous forme de trois tableaux de réels, un par
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 84
coordonnées. Le nombre de tableaux à une dimension obtenu est directement lié au nombre depropriétés différentes associées à chaque agent : si ce nombre augmente, le nombre de tableauxnécessaires, et donc le nombre de paramètres devant être passés au programme, augmente égale-ment. Si le modèle agent décrit plusieurs types d’individus différents, dotés ou non de certainespropriétés, un choix se pose alors au concepteur du stockage mémoire : soit d’effectuer l’union detous les ensembles de propriétés stockés dans le modèle, soit de dédier à chaque type d’agent sonensemble de tableau, sans réutilisation. Le premier cas permet de limiter l’explosion du nombrede paramètres quand de nombreuses informations sont communes à toutes les catégories d’agents,comme une position. Elle signifie cependant que chaque tableau de propriétés n’est plus appli-cable à l’ensemble des agents, et comprendra donc des “lacunes” correspondant aux agents pourlesquels cette propriété n’est pas définie. Ces lacunes peuvent avoir à être ignorées au moyen detests nuisant à l’utilisation effective des coeurs d’exécution en forçant le matériel à évaluer lesdeux branches de la condition. Le second cas évite ce problème, chaque propriété étant définiepour l’ensemble du type d’agent décrit, au prix d’une multiplication du nombre de structures dedonnées devant être gérées dans la programmation du modèle.
Une seconde approche est une programmation “objet”, où chaque ensemble de propriétés eststocké dans sa propre structure spécialisée. Il est dans ce cas important de prendre en comptel’augmentation de l’espace mémoire engendré par l’alignement des attributs de chaque structure.Une règle simple pour minimiser ces pertes mémoires est, autant que possible, d’organiser lespropriétés par ordre de taille dans la description de la structure. Cette opération n’est pas effec-tuée automatiquement par la plupart des compilateurs pour éviter de produire des représentationsbinaires différentes, et donc des incompatibilités, en fonction du logiciel utilisé pour compilerchaque portion de programme.
Le choix de l’une ou l’autre de ces solutions est à la fois gouverné par les considérations dé-crites en termes de stockage (nombre de paramètres nécessaires, de types distincts, recouvrementou non de nombreuses propriétés entre les agents) et par l’algorithme lui-même, et plus particuliè-rement l’ordre et le mode d’accès aux données. Ainsi, dans le cadre d’un kernel où tous les agentsaccèdent à une seule propriété, un stockage des propriétés par tableaux permet de récupérer cetteinformation pour tous les agents voisins en une seule requête, du fait des lectures par paquet effec-tuées par le GPU. Si l’exécution de chaque agent est au contraire basée sur l’accès à ses propresdonnées uniquement, l’utilisation de tableaux de structures permet dans ce cas de récupérer toutesles propriétés associées à l’agent de manière simultanée.
6.2.4 Diagnostic des erreurs
Le développement et le diagnostic des erreurs de modèles complets sur GPU sont rendus diffi-cile par l’impossibilité d’écrire des informations de diagnostic dans une sortie ou dans un fichierpendant l’exécution OpenCL.
La récupération des erreurs est également rendue ardue par la nature asynchrone de l’exécutionsur GPU. Cette asynchronisme se traduit par une vérification des erreurs sur de nombreuses im-plémentations d’OpenCL au moment de la soumission de la prochaine opération seulement. Cettesoumission peut n’avoir aucun rapport avec l’exécution fautive ou être éloignée, ce qui retarde ladécouverte du dysfonctionnement.
Enfin, la remontée des erreurs est effectuée, comme en C, sous forme de codes de retoursprédéfinis n’indiquant pas la source et la position précise de l’erreur dans le programme. Cescodes d’erreurs sont de plus susceptibles de varier entre implémentations d’OpenCL.
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 85
Il est possible de pallier, dans une certaine mesure, à ces difficultés de diagnostic en examinantrégulièrement l’évolution des structures de données de la simulation au cours du processus dedéveloppement, ou en écrivant des informations de diagnostic dans des structures de données desorties spécialisées. Cette solution ne fonctionne cependant pas en cas d’interruption du kerneld’exécution, et permet surtout la validation du bon fonctionnement de la simulation.
6.3 Parallélisation de certains traitements
Une seconde approche de parallélisation d’un système multi-agents sur GPU est de ne réaliserque certains traitements sur carte graphique et de conserver le reste de la simulation sur CPU.
Cette approche permet de conserver les aspects complexes de la simulation sur le CPU, commedans le cas de la gestion des listes de positions de chaque individu dans le modèle proie-prédateur.Elle permet de tirer parti de la puissance du GPU pour des traitements parallélisables et coûteuxen temps de calcul, et donc d’accélérer l’exécution du modèle dans son ensemble, mais requiertelle aussi une expertise en programmation pour implémenter ces opérations. L’utilisation de deuxlangages et architecture d’exécution différentes dans la même simulation impose également depouvoir transformer les structures de données utilisées sur CPU en structures équivalentes surGPU, et inversement, pour les informations communes aux deux modes d’exécution.
6.3.1 Adaptation des structures de données CPU
Le langage Java est associé à une très vaste bibliothèque de structures de données prédéfiniesà la disposition des développeurs. Cette base commune permet au concepteur de nouvelles biblio-thèques Java de disposer des structures les plus courantes, comme les dictionnaires, les listes oudes files d’attente sans avoir besoin d’en développer sa propre implémentation ou de recourir àdes bibliothèques externes. Cette standardisation des structures de données facilite également leurpartage et leur adaptation sous forme de structure OpenCL.
6.3.2 Exécution synchrone ou asynchrone
Les simulations multi-agents sont basées sur le découpage de leur évolution en étapes discrètesdéclenchées de manière régulière (pas de temps) ou par certains événements. L’exécution du mo-dèle ou de la plate-forme est également souvent synchrone, pour faciliter la gestion de la mise àjour de la vue ou des résultats de la simulation.
Le modèle d’exécution offert par OpenCL est, pour sa part, basé sur une exécution asynchronepar le biais d’un mécanisme de file d’attente. L’utilisation d’opérations asynchrones favorise laréalisation de tâches en parallèle de l’exécution de traitements et l’indication de dépendances entretâches, tandis que l’exécution synchrone permet un blocage implicite de l’exécution du modèlemulti-agents dans l’attente de résultat.
Dans ces circonstances, une première approche est d’interrompre le déroulement de la simu-lation sur CPU pour chaque traitement sur GPU en effectuant des soumissions synchrone. Ledéroulement de l’exécution obtenue est illustré par la Figure 6.3. Cette approche revient à bloquerl’exécution de la totalité du modèle tant que le traitement GPU n’est pas terminé, alors qu’il seraitpar exemple possible d’exploiter le CPU pour réaliser des opérations d’affichage ou encore la miseà jour ou l’exécution d’autres parties du modèle.
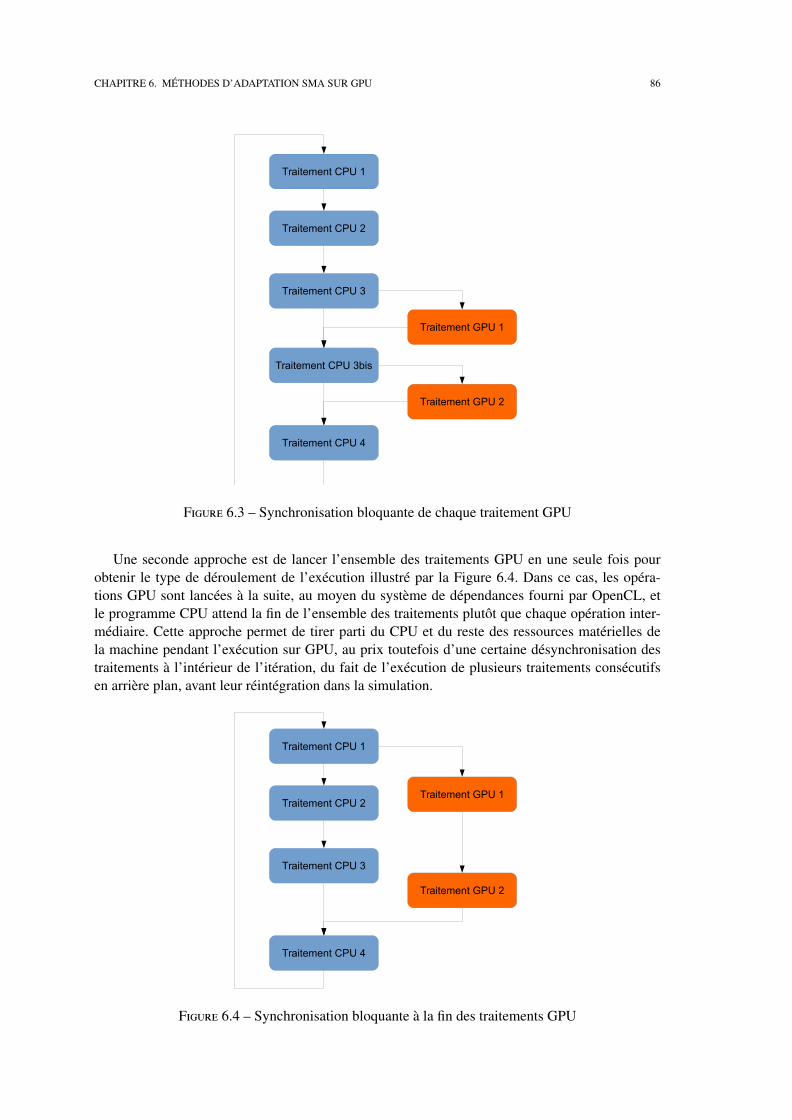
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 86
Traitement CPU 1
Traitement CPU 4
Traitement GPU 1
Traitement GPU 2
Traitement CPU 2
Traitement CPU 3
Traitement CPU 3bis
Figure 6.3 – Synchronisation bloquante de chaque traitement GPU
Une seconde approche est de lancer l’ensemble des traitements GPU en une seule fois pourobtenir le type de déroulement de l’exécution illustré par la Figure 6.4. Dans ce cas, les opéra-tions GPU sont lancées à la suite, au moyen du système de dépendances fourni par OpenCL, etle programme CPU attend la fin de l’ensemble des traitements plutôt que chaque opération inter-médiaire. Cette approche permet de tirer parti du CPU et du reste des ressources matérielles dela machine pendant l’exécution sur GPU, au prix toutefois d’une certaine désynchronisation destraitements à l’intérieur de l’itération, du fait de l’exécution de plusieurs traitements consécutifsen arrière plan, avant leur réintégration dans la simulation.
Traitement CPU 1
Traitement CPU 4
Traitement GPU 1
Traitement GPU 2
Traitement CPU 2
Traitement CPU 3
Figure 6.4 – Synchronisation bloquante à la fin des traitements GPU
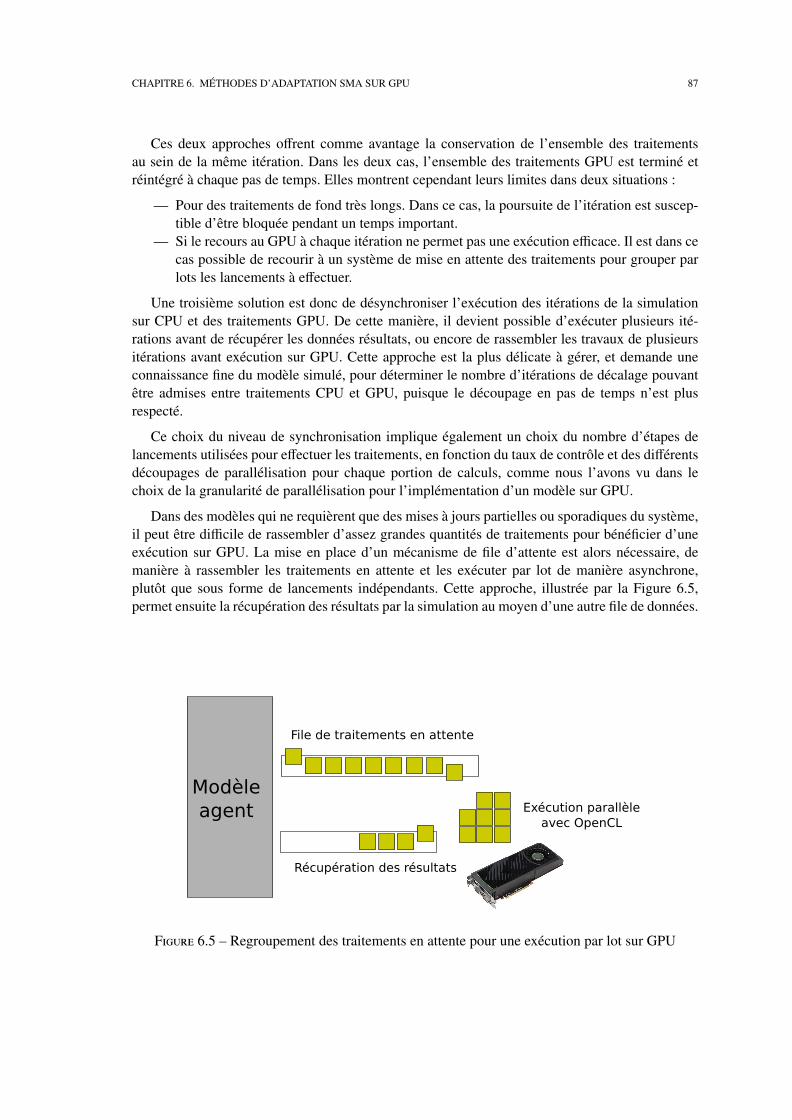
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 87
Ces deux approches offrent comme avantage la conservation de l’ensemble des traitementsau sein de la même itération. Dans les deux cas, l’ensemble des traitements GPU est terminé etréintégré à chaque pas de temps. Elles montrent cependant leurs limites dans deux situations :
— Pour des traitements de fond très longs. Dans ce cas, la poursuite de l’itération est suscep-tible d’être bloquée pendant un temps important.
— Si le recours au GPU à chaque itération ne permet pas une exécution efficace. Il est dans cecas possible de recourir à un système de mise en attente des traitements pour grouper parlots les lancements à effectuer.
Une troisième solution est donc de désynchroniser l’exécution des itérations de la simulationsur CPU et des traitements GPU. De cette manière, il devient possible d’exécuter plusieurs ité-rations avant de récupérer les données résultats, ou encore de rassembler les travaux de plusieursitérations avant exécution sur GPU. Cette approche est la plus délicate à gérer, et demande uneconnaissance fine du modèle simulé, pour déterminer le nombre d’itérations de décalage pouvantêtre admises entre traitements CPU et GPU, puisque le découpage en pas de temps n’est plusrespecté.
Ce choix du niveau de synchronisation implique également un choix du nombre d’étapes delancements utilisées pour effectuer les traitements, en fonction du taux de contrôle et des différentsdécoupages de parallélisation pour chaque portion de calculs, comme nous l’avons vu dans lechoix de la granularité de parallélisation pour l’implémentation d’un modèle sur GPU.
Dans des modèles qui ne requièrent que des mises à jours partielles ou sporadiques du système,il peut être difficile de rassembler d’assez grandes quantités de traitements pour bénéficier d’uneexécution sur GPU. La mise en place d’un mécanisme de file d’attente est alors nécessaire, demanière à rassembler les traitements en attente et les exécuter par lot de manière asynchrone,plutôt que sous forme de lancements indépendants. Cette approche, illustrée par la Figure 6.5,permet ensuite la récupération des résultats par la simulation au moyen d’une autre file de données.
Modèleagent
File de traitements en attente
Exécution parallèleavec OpenCL
Récupération des résultats
Figure 6.5 – Regroupement des traitements en attente pour une exécution par lot sur GPU
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 88
6.3.3 Gestion de la mémoire
Dans le cas où seuls certains traitements sont parallélisés sur GPU, il est possible de distinguertrois cycles de vie distincts pour les structures mémoires OpenCL :
— Tout la durée d’utilisation du GPU. Ce cycle de vie comprend les structures de données,telles que le contexte d’exécution OpenCL ou les files de soumission de traitement, quisont utilisées pour toute la durée de la simulation. La création d’un nouveau contexte esteffectuée soit au moment de l’initialisation du modèle ou de la plate-forme, soit au mo-ment du premier lancement OpenCL. Sa libération peut être gérée de la même manière,soit implicitement par la plate-forme ou la sortie du programme, soit explicitement parla simulation. La libération explicite du contexte d’exécution est importante dans le casoù le même programme créerait d’autres contextes par la suite, pour éviter toute perte deressources liée aux anciens contextes d’exécution GPU encore présents en mémoire.
— Le lancement d’un ensemble de fonctions apparentées ou de la même fonction à plusieursreprises. La même opération peut être utilisée à chaque itération du modèle, ou plusieursfois dans une même itération pour des fonctions différentes. C’est le cas, par exemple,dans le modèle proie-prédateur, de la fonction de déplacement utilisée à la fois pour lesproies et les prédateurs. Dans ces circonstances, il est intéressant de ne pas avoir de nou-veau à préparer et compiler les mêmes programmes GPU à chaque appel de la fonction.Cette réutilisation impose cependant, une fois de plus, la gestion de la mémoire par laplate-forme ou la simulation. Une solution est de permettre au développeur d’indiquer s’ilest souhaitable de conserver les programmes entre chaque exécution, ou si la totalité desstructures nécessaires au lancement doit être de nouveau préparée à chaque traitement.
— Le lancement d’un seul traitement. Comme nous l’avons vu dans notre présentation dumodèle de programmation GPU, l’exécution du lancement d’un programme implique unecopie des données d’entrée sur le périphérique avant l’exécution, suivi d’une récupérationdes résultats une fois l’exécution terminée. Cette démarche donne lieu à l’utilisation denombreux objets temporaires, susceptibles d’être alloués et libérés automatiquement parl’implémentation du traitement sur GPU, de manière transparente pour le reste de la simu-lation.
La prise en compte de ces trois cycles de vie est importante pour permettre une gestion correctede l’allocation et de la libération de la mémoire native, tout en minimisant la quantité de gestionmanuelle de la mémoire devant être effectuée par le reste de la simulation, souvent basée sur unmécanisme de ramasse-miettes. L’utilisation de ce mécanisme n’est hélas pas possible pour au-tomatiser toutes ces libérations, car son invocation n’est pas garantie par de nombreux langageset de nombreuses plates-formes tant qu’il reste de la mémoire disponible. Les structures nativesn’étant que partiellement situées dans les données visibles par le programme, la saturation desressources GPU ne déclenche pas ce mécanisme de récupération mémoire. La prise en compte duramasse-miettes peut cependant venir en complément de cette gestion du cycle de vie des diffé-rentes structures GPU, en filet de sécurité supplémentaire permettant la libération de la mémoire.
6.4 Utilisation de traitements parallélisés existants
Les deux approches précédentes correspondent à un premier scénario de parallélisation, où leconcepteur dispose d’une expertise GPU à même de lui permettre de réaliser tout ou partie de lasimulation sur cette architecture. Elles ne permettent cependant pas directement un second scénariod’utilisation, le recours au GPU sans connaissance particulière de l’architecture d’exécution ou
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 89
d’un langage de programmation GPGPU.
Une troisième approche possible d’adaptation d’une simulation multi-agents est de réutiliserdes opérations de haut niveau déjà parallélisées sur GPU, en considérant ainsi la programmationGPGPU comme une boîte opaque permettant d’améliorer les performances du programme. Ellene requiert pas une gestion directe des ressources ou de l’exécution GPU par la simulation ou laplate-forme multi-agents.
L’utilisation de fonctions génériques implique cependant, comme dans le cas de l’utilisation debibliothèques matricielles ou d’algèbre linéaire, de ramener les portions de la simulation à paral-léliser à des opérations et des structures de données standards pour pouvoir utiliser un traitementgénérique.
Dans le modèle proie-prédateur, il est ainsi intéressant de ramener la mise à jour des végétauxou la somme des énergies à des opérations matricielles, plutôt qu’à un traitement ponctuel parchaque agent dans l’algorithme.
6.4.1 Contrôle du contexte d’exécution
OpenCL sélectionne par défaut automatiquement une périphérique d’exécution local présentsur la machine, CPU ou GPU, si aucun type de matériel n’est indiqué. Ce comportement facilite lelancement de calculs sans avoir à choisir explicitement un support parmi les solutions d’exécutiondisponibles.
Il est toutefois important, dans le l’utilisation de traitements parallélisés pré-implémentés, quele concepteur de modèle ait la possibilité de contrôler le type de périphérique d’exécution utilisé,pour plusieurs raisons :
— Dans le cas d’une parallélisation hybride, pour garantir que l’exécution des opérations aurabien lieu sur GPU, Xeon Phi, ou FPGA plutôt que sur le processeur déjà utilisé pour lereste de la simulation.
— Pour permettre la comparaison entre différents matériels, de manière à mesurer l’impactsur les performances de différentes alternatives d’exécution.
Pour faciliter au maximum l’utilisation de ces traitements agents parallélisés, et assurer leurportabilité sur de nombreuses machines, quelles que soient les ressources locales disponibles demanière générale, il est toutefois important de laisser la possibilité d’une sélection implicite dutype de périphérique utilisé. Ce choix par défaut peut alors être celui du premier périphérique dis-ponible, ou reposer sur des heuristiques plus complexes, privilégiant la solution disponible consi-dérée comme la plus rapide en calcul.
6.4.2 Gestion de la mémoire
L’utilisation de traitements parallélisés existants libère l’utilisateur de la responsabilité de lagestion des structures mises en jeu de manière interne par les traitements, mais requiert toujours laprise en compte des structures persistantes entre plusieurs traitements.
Le fait de devoir préparer à nouveau un contexte d’exécution et compiler un programme GPUpour chaque opération peut poser problème dans le cas de calculs courts. Ces préparations prennentalors en effet un temps important en regard du temps effectivement passé en calcul sur le périphé-rique.
Une solution à ce problème est de regrouper les traitements de même type sous forme de mo-
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 90
dule, à même d’être préparé une seule fois et réutilisé pour lancer plusieurs fois le même trai-tement. Dans ce cas, le lancement d’un traitement parallélisé sur GPU peut être décomposé trèssimplement :
— Création d’un contexte.— Instantiation d’un module d’exécution.— Lancement de n traitements fournis par ce module.— Libération du module après utilisation.— Libération du contexte.
Il est possible d’envisager une libération automatique de toutes les ressources associées à cecontexte au moment de sa destruction. Cette démarche simplifie alors encore davantage ce typed’utilisation dans une simulation ou une plate-forme multi-agents existants.
6.4.3 Conception de nouveaux traitements génériques
Si l’utilisation de traitements génériques permet l’utilisation du GPU sans expertise de l’archi-tecture, elle requiert également une démarche de conception particulière pour le développementde ces traitements. Si ce processus se rapproche de la seconde approche de parallélisation d’unesimulation multi-agents, une adaptation partielle sur GPU, elle s’en différencie toutefois par lavolonté de proposer une interface générique, découplée de tout modèle spécifique.
Cette volonté de proposer une opération utilisable le plus largement possible se retrouve à lafois dans le choix des structures de données, de type grille, vecteur ou scalaires plutôt qu’objet, etdans l’interface d’appel. Cette dernière est conçue de manière à permettre au concepteur d’indiquertous les paramètres d’entrée et de sortie de l’exécution sur GPU en une seule fois, en minimisantautant que possible les transformations ou préparations à effectuer. De cette manière, la totalité del’exécution (préparation, copie des données, exécution et récupération des résultats) peut être priseen charge une seule fois par la fonction générique, plutôt que par le concepteur.
Il est possible d’illustrer cette démarche de généralisation sur la mise à jour des ressourcesvégétales de l’environnement dans le modèle proie-prédateur.
Une première approche de mise à jour de cette grille est d’indiquer directement les facteurs decroissance devant être appliqués sous forme de constantes dans l’implémentation OpenCL. Cettesolution lie cependant fortement cette mise à jour au modèle proie-prédateur : pour pouvoir utiliserce traitement dans un autre modèle, il est nécessaire d’effectuer une copie du code associée à cetraitement, et de modifier la valeur de ces constantes.
Une manière de rendre ce traitement générique et directement utilisable par d’autres simula-tions multi-agents est d’indiquer ces facteurs de croissance dans l’appel de la fonction. L’opérationde mise à jour devient alors un moyen d’appliquer une transformation affine sur une grille quel-conque, plutôt qu’uniquement sur un environnement proie-prédateur.
Ce type de traitement générique peut être rapproché des opérations proposées par des biblio-thèques comme CuBLAS : il peut alors être exploité sans connaissance particulière du fonction-nement de l’algorithme ou du GPU avec une simple structure de grille et deux facteurs indiquantl’opération à appliquer à chaque cellule.
CHAPITRE 6. MÉTHODES D’ADAPTATION SMA SUR GPU 91
6.5 Synthèse
Ce chapitre nous a permis de mettre en avant deux scénarios d’utilisation du GPU dans desmodèles et des plates-formes multi-agents existants.
Le premier scénario repose sur une utilisation directe des concepts de programmation GPUpour implémenter tout le modèle agent sur cette architecture. Cette utilisation de bas niveau imposecependant de nombreuses contraintes, tant en termes de représentation des données qu’en termesd’exécution, pour lesquelles il est toutefois possible de fournir des mécanismes venant en aide audéveloppeur.
Le second scénario repose sur l’utilisation de traitements agents parallélisés existants ou im-plémentés par le concepteur. L’utilisation du GPU est alors totalement abstraite pour le reste dela simulation, ce qui facilite son intégration dans des modèles ou des plates-formes multi-agentspour accélérer des portions de traitements. Cette seconde utilisation, de beaucoup plus haut niveau,pose également ses propres problématiques pouvant être en partie résolues par une bibliothèqueadaptée.
L’étude de ces deux scénarios a conduit notre réflexion lors de la conception de la bibliothèqueMCMAS, conçue pour permettre ces deux types d’utilisations.

7MCMAS, une bibliotheque d’execution
generique
Dans le chapitre précédent, nous avons mis en avant les deux méthodes de parallélisation de mo-dèles multi-agents sur GPU, le portage de la totalité du modèle sur cette architecture d’exécutionou la seule adaptation de certains traitements. Dans ce chapitre, nous présentons notre bibliothèqueMCMAS, qui vise à répondre à ces deux scénarios en facilitant à la fois l’utilisation du GPU sansconnaissance approfondie de la plate-forme, et la réutilisation d’algorithmes et de structures pourdes modèles qui souhaiteraient utiliser OpenCL.
Dans une première section, nous détaillons les objectifs auxquels répond notre bibliothèque.Nous étudions ensuite l’influence de ces objectifs sur l’architecture de MCMAS, basée sur uneinterface de programmation haut niveau, ne mettant pas en jeu de connaissances GPU, et uneinterface plus bas niveau permettant un accès complet à OpenCL. Nous présentons ensuite l’im-plémentation par MCMAS de la gestion du contexte d’exécution et des principales structures dedonnées rencontrées dans les systèmes multi-agents. Nous abordons également la manière donc labibliothèque permet le recours à des types plus spécifiques spécialisés pour l’exécution sur GPU.Enfin, nous présentons l’utilisation de MCMAS par le biais de son interface de haut niveau, puispar le biais de son interface de bas niveau pour développer de nouvelles fonctionnalités de manièreindépendante ou au sein de la bibliothèque.
7.1 Présentation générale
MCMAS 1 est une bibliothèque Java développée pour permettre la parallélisation efficace desystèmes multi-agents sur GPU. Son exécution est basée sur le modèle de programmation OpenCL,de manière à permettre l’utilisation une variété de supports la plus large possible, allant d’archi-tectures many-cores comme les GPU aux processeurs traditionnels le cas échéant.
La volonté centrale derrière la conception de MCMAS est d’offrir deux niveaux d’utilisationau développeur, basés sur des interfaces de programmation distinctes :
— Une interface d’utilisation OpenCL accessible en Java incluant tous les éléments néces-saires à l’accès au modèle de programmation, dans le cadre d’une programmation objet,ainsi que des structures de données et des mécanismes d’aide à l’exécution prêts à êtreutilisés.
— Une interface de haut niveau permettant l’appel d’implémentations optimisées des trai-tements multi-agents les plus courants. Cette interface permet la parallélisation aisée demodèles existants sans connaissance GPU, tant depuis des modèles d’agents directement
1. Many-Core Multi Agent Systems
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 94
réalisés en Java, que depuis des plates-formes existantes telles que MadKit, NetLogo ouGAMA. L’utilisation de ces fonctions est conçue pour être la moins intrusive possible etréduire au minimum le nombre de structures de données manipulées pour réaliser un trai-tement.
Cette volonté de fournir deux interfaces d’utilisation a une influence directe sur l’architectureretenue pour la bibliothèque, que nous présentons dans la section suivante.
7.2 Architecture
L’architecture de MCMAS peut être vue comme l’empilement de deux couches applicativesdistinctes et complémentaires en termes d’utilisation :
— Une base commune, MCM 2. Cette couche permet l’accès au modèle de programmationOpenCL par le biais d’une interface objet. Elle comprend de nombreux outils de gestion del’exécution et des structures de données communément utilisées pour l’implémentation demodèles et de traitements multi-agents utilisables sur GPU. Elle représente l’interface debas niveau de MCMAS, permettant la réalisation de nouveaux traitements avec la biblio-thèque.
— Un ensemble de plugins fournissant des traitements génériques réutilisables. Cette coucheapplicative repose sur l’interface de programmation MCM pour proposer des traitementsmulti-agents déjà implémentés sous la forme de fonctions de haut niveau, comme la miseà jour de l’environnement ou le calcul de déplacements. Cet ensemble de plugins est ex-tensible au moyen de la couche applicative MCM ou en encapsulant l’appel à d’autresplugins, de manière à ajouter le support de nouvelles opérations et de nouvelles structuresde données à la bibliothèque.
Ces deux couches applicatives sont représentées dans la Figure 7.1, qui illustre également lesconcepts de plugins et de contexte d’exécution proposés par notre bibliothèque. Des fonctionsdifférentes sont dévolues à chacune de ces deux couches, comme nous le présentons par la suite.
7.2.1 Une interface de bas niveau : MCM
MCM représente la base de la bibliothèque MCMAS, et offre l’accès à l’interface de program-mation de bas niveau de notre bibliothèque et à tous les mécanismes de l’exécution sur GPU. Ellereprend la gestion d’un grand nombre de problématiques liées au développement et au lancementde programmes OpenCL.
MCM facilite la gestion de la mémoire native en intégrant la gestion du ramasse-miettes et enpermettant de manière optionnelle d’associer toutes les structures mémoires et applicatives à leurcontexte d’allocation, de manière à assurer leur libération automatique au moment de la destructionde ce contexte.
Cette couche applicative fournit les structures de données communes de type grille, vecteur ouobjet proposées par MCMAS, à la fois du côté Java et OpenCL de l’exécution. La conversion deces structures MCMAS vers et depuis les types de données Java les plus courants est égalementincluse à ce niveau de la bibliothèque.
MCM repose sur la couche d’adaptation JOCL pour l’accès à l’interface de programmation
2. Many-Core Manager
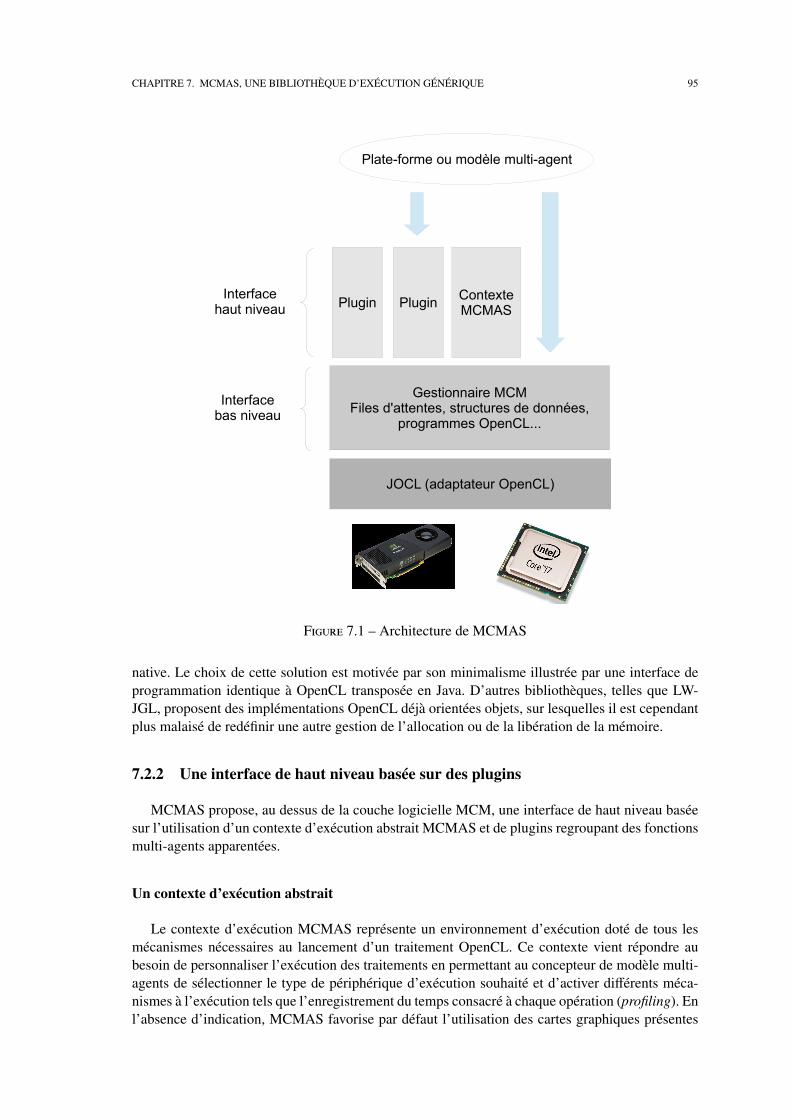
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 95
JOCL (adaptateur OpenCL)
Plugin
Gestionnaire MCMFiles d'attentes, structures de données,
programmes OpenCL...
ContexteMCMAS
Plugin
Plate-forme ou modèle multi-agent
Interfacehaut niveau
Interfacebas niveau
Figure 7.1 – Architecture de MCMAS
native. Le choix de cette solution est motivée par son minimalisme illustrée par une interface deprogrammation identique à OpenCL transposée en Java. D’autres bibliothèques, telles que LW-JGL, proposent des implémentations OpenCL déjà orientées objets, sur lesquelles il est cependantplus malaisé de redéfinir une autre gestion de l’allocation ou de la libération de la mémoire.
7.2.2 Une interface de haut niveau basée sur des plugins
MCMAS propose, au dessus de la couche logicielle MCM, une interface de haut niveau baséesur l’utilisation d’un contexte d’exécution abstrait MCMAS et de plugins regroupant des fonctionsmulti-agents apparentées.
Un contexte d’exécution abstrait
Le contexte d’exécution MCMAS représente un environnement d’exécution doté de tous lesmécanismes nécessaires au lancement d’un traitement OpenCL. Ce contexte vient répondre aubesoin de personnaliser l’exécution des traitements en permettant au concepteur de modèle multi-agents de sélectionner le type de périphérique d’exécution souhaité et d’activer différents méca-nismes à l’exécution tels que l’enregistrement du temps consacré à chaque opération (profiling). Enl’absence d’indication, MCMAS favorise par défaut l’utilisation des cartes graphiques présentes
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 96
en local, et recourt, le cas échéant, à l’utilisation du processeur traditionnel.
Ce contexte offre également l’accès aux objets MCM sous-jacents, de manière à permettre lacombinaison des deux interfaces de programmation offertes par MCMAS dans un même environ-nement d’exécution.
Des plugins spécialisés
Les opérations de haut niveau proposées par MCMAS sont regroupées en plugins spécialiséspar thématiques, de manière à faciliter la découverte de l’interface de haut niveau de la bibliothèqueet d’assurer un découpage clair des responsabilités de chaque module.
Ces plugins gèrent la réutilisation des ressources mémoires entre fonctions apparentées de ma-nière transparente, et implémentent des classes de traitements agents pouvant être parallélisées.
Cette décomposition en modules indépendants facilite l’ajout de nouvelles fonctionnalités àMCMAS, pour gérer de nouveaux traitements ou de nouvelles structures de données rencontrésdans les systèmes multi-agents.
Une grande partie des plugins proposés avec MCMAS est incluse dans la même archive quela bibliothèque logicielle. Les plugins MCMAS peuvent également être distribués de manière in-dépendante : l’enregistrement de ces nouvelles opérations n’impose pas de contrainte particulière,de manière à faciliter leur intégration dans tout programme ou plate-forme multi-agents existant.
7.3 Implémentation
Après ce panorama de l’architecture proposée par MCMAS, nous présentons dans la suitequelques points d’implémentation de cette bibliothèque et nous justifions les choix correspondantsqui ont été effectués.
7.3.1 Contexte d’exécution
La première fonction essentielle pour MCMAS est la création d’un contexte d’exécution et desstructures correspondantes. Ce processus implique le choix d’un périphérique d’exécution sur lamachine, qui est susceptible d’offrir de manière simultanée l’accès à des architectures matériellesmany-core ou à des architectures multi-coeurs CPU plus traditionnelles.
Le choix de ce périphérique d’exécution peut être effectué de trois façons différentes avecMCMAS :
— En l’absence d’indication, MCMAS sélectionne automatiquement une solution d’exécu-tion. Dans ce cas, les cartes graphiques sont retenues en priorité, avant de considérer àdéfaut l’exécution sur le processeur local.
— En indiquant un type de matériel d’exécution. Dans ce cas, MCMAS recherche tous lespériphériques OpenCL de ce type présents sur la machine, et sélectionne par défaut lepremier matériel rencontré. Une erreur est retournée le cas échéant par la bibliothèque.Il est possible d’indiquer plusieurs types de matériel à rechercher, pour reproduire unerecherche en cascade similaire à celle effectuée en l’absence d’indication.
— En indiquant une implémentation et un matériel OpenCL particulier. Cette dernière ap-proche permet de contrôler le périphérique d’exécution effectivement utilisé par MCMAS.
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 97
Elle est indispensable pour exploiter plusieurs cartes graphiques qui seraient présentes surla même machine.
En parallèle du choix du périphérique, de nombreux paramètres de l’exécution OpenCLpeuvent également être contrôlés, parmi lesquels :
— Le niveau d’optimisation à utiliser pour la compilation des programmes OpenCL.— L’activation du support du profiling, pour permettre l’obtention de statistiques de temps sur
chaque opération.— L’utilisation par défaut d’opérations flottantes en double ou simple précision.— Le respect strict ou non du standard IEEE sur les opérations flottantes, pour permettre
l’obtention de meilleures performances sur les opérations les plus courantes.
MCMAS permet le contrôle simple de la disponibilité et de l’activation de ces fonctionnalitésindépendamment des spécificités liées aux différentes versions d’OpenCL et aux extensions pro-posées par les implémentations du standard de chaque fabriquant. Par défaut, les fonctionnalités nepénalisant ni les performances ni la précision des calculs sont activées, pour permettre un meilleurdiagnostic au moment de la compilation d’erreurs de syntaxe ou des ressources consommées surGPU.
7.3.2 Structures de données agents
De nombreuses structures de données, telles que les vecteurs ou les grilles, sont très couram-ment utilisées par les systèmes multi-agents.
Si ces structures sont fournies de manière standard sous forme de collection ou aisément réa-lisables par le développeur sous forme de tableaux statiques à plusieurs dimensions en Java, l’ab-sence de support objet et les restrictions sur les types de données imposées par OpenCL rendentmoins aisée leur représentation sur GPU, particulièrement en l’absence de véritable bibliothèquede données standard.
OpenCL ne permet en effet le passage et l’utilisation sur GPU que de trois catégories de don-nées :
— Des données scalaires de type primitif ou structure.— Des tableaux statiques à une dimension.— Des textures.
Dans ces circonstances, il est nécessaire pour supporter les principaux types de données agentsde pouvoir les convertir et les manipuler sous la forme d’une combinaison d’une ou plusieurs desstructures ci-dessus.
L’approche retenue par MCMAS est de tirer parti des outils de conversion déjà fournis parJOCL entre buffers binaires Java NIO et buffers OpenCL, en facilitant la conversion et la récu-pération des autres types scalaires à partir de ce format. Pour ce faire, de nombreuses classesconstituées de fonctions statiques de conversion sont fournies.
Dans les sous-sections suivantes, nous allons présenter quelques structures de données fourniespar MCMAS, ainsi que leur implémentation.

CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 98
Types primitifs
Le langage OpenCL étant directement basé sur le standard C99, l’ensemble des types primitifscommuns à C et à Java sont directement utilisables dans MCMAS, à l’exception notable du typebooléen.
Les types non signés disponibles en C et en OpenCL doivent cependant être manipulés avecprécaution, Java ne gérant que les types signés. L’interprétation automatique du premier bit commeun indicateur de signe signifie en effet que leur valeur sera interprétée de manière différente entrele système hôte et les kernels d’exécution.
Types objets
Il est possible de passer des objets à l’exécution d’un programme OpenCL en les représen-tant sous forme de structure. Ces structures reprennent alors les propriétés de l’objet devant êtreaccessibles sur le GPU.
Ces structures sont générées automatiquement par introspection à partir de toute classe Javahéritant de la classe Struct. Seuls les attributs publics associés à la classe sont pris en compte,OpenCL ne proposant pas de contrôle d’accès. Le Listing 7.2 illustre un exemple d’objet Java etde la structure équivalente associée au niveau d’OpenCL.
1 public class Coord extends
Struct {
2
3 public int x;
4 public int y;
5 public int z;
6
7 public Coord(int x, int y, int
z) {
8 this.x = x;
9 this.y = y;
10 this.z = z;
11 }
12 }
1 struct {
2 int x;
3 int y;
4 int z;
5 } Coord;
Figure 7.2 – Exemple d’objet Java et de sa représentation en OpenCL avec MCMAS
Vecteurs
Le langage OpenCL propose un type de tableau statique hérité du langage C. Ces tableauxpeuvent non seulement stocker les types communs à ces deux langages (primitifs et structures),mais également les types vectoriels introduits par l’architecture GPU. Ces tableaux, contrairementà leur équivalent Java, ne stockent cependant aucune information de taille. Dans ces conditions,deux choix sont possibles :
— L’utilisation directe de tableaux OpenCL. Dans ce cas, la taille du tableau doit être stockéeet indiquée aux différentes fonctions de manière indépendante. Cette approche similaire àcelle employée en C/C++ est grandement facilitée dans le cas de problèmes où la taille desstructures est directement liée aux propriétés du modèle, et peut donc être déduite de ma-nière aisée à partir de ces informations. Le nombre de positions d’individus à déplacer peut
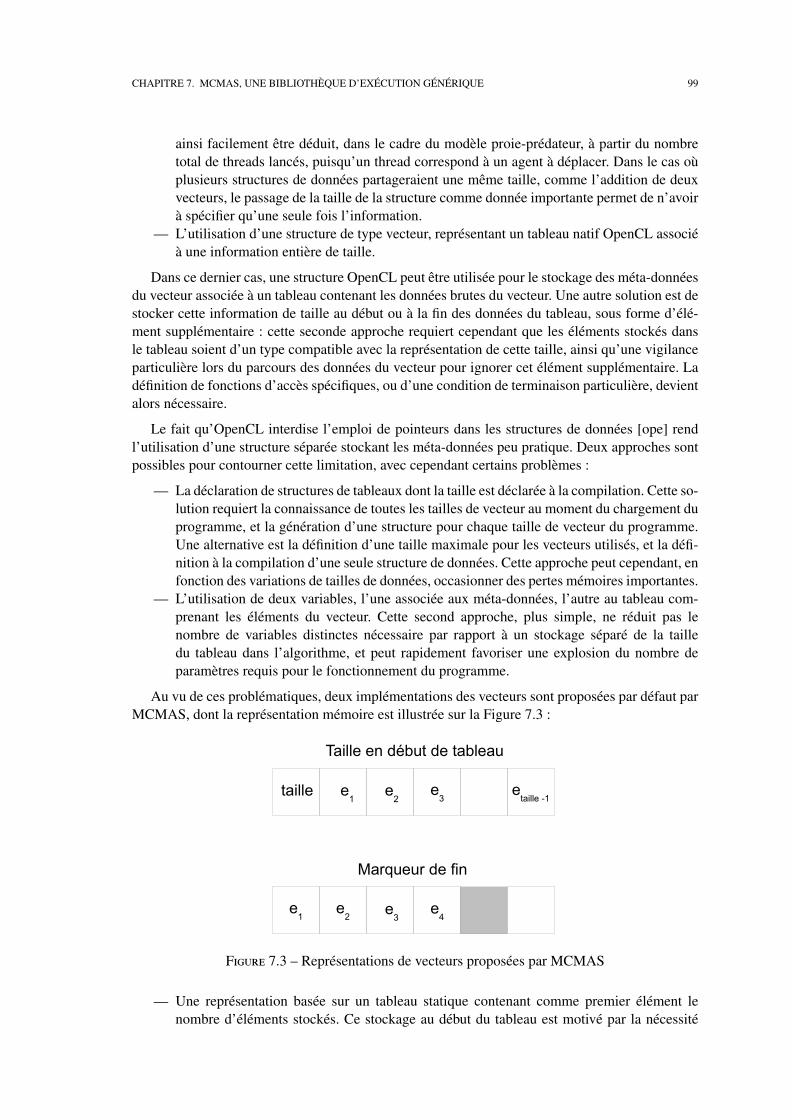
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 99
ainsi facilement être déduit, dans le cadre du modèle proie-prédateur, à partir du nombretotal de threads lancés, puisqu’un thread correspond à un agent à déplacer. Dans le cas oùplusieurs structures de données partageraient une même taille, comme l’addition de deuxvecteurs, le passage de la taille de la structure comme donnée importante permet de n’avoirà spécifier qu’une seule fois l’information.
— L’utilisation d’une structure de type vecteur, représentant un tableau natif OpenCL associéà une information entière de taille.
Dans ce dernier cas, une structure OpenCL peut être utilisée pour le stockage des méta-donnéesdu vecteur associée à un tableau contenant les données brutes du vecteur. Une autre solution est destocker cette information de taille au début ou à la fin des données du tableau, sous forme d’élé-ment supplémentaire : cette seconde approche requiert cependant que les éléments stockés dansle tableau soient d’un type compatible avec la représentation de cette taille, ainsi qu’une vigilanceparticulière lors du parcours des données du vecteur pour ignorer cet élément supplémentaire. Ladéfinition de fonctions d’accès spécifiques, ou d’une condition de terminaison particulière, devientalors nécessaire.
Le fait qu’OpenCL interdise l’emploi de pointeurs dans les structures de données [ope] rendl’utilisation d’une structure séparée stockant les méta-données peu pratique. Deux approches sontpossibles pour contourner cette limitation, avec cependant certains problèmes :
— La déclaration de structures de tableaux dont la taille est déclarée à la compilation. Cette so-lution requiert la connaissance de toutes les tailles de vecteur au moment du chargement duprogramme, et la génération d’une structure pour chaque taille de vecteur du programme.Une alternative est la définition d’une taille maximale pour les vecteurs utilisés, et la défi-nition à la compilation d’une seule structure de données. Cette approche peut cependant, enfonction des variations de tailles de données, occasionner des pertes mémoires importantes.
— L’utilisation de deux variables, l’une associée aux méta-données, l’autre au tableau com-prenant les éléments du vecteur. Cette second approche, plus simple, ne réduit pas lenombre de variables distinctes nécessaire par rapport à un stockage séparé de la tailledu tableau dans l’algorithme, et peut rapidement favoriser une explosion du nombre deparamètres requis pour le fonctionnement du programme.
Au vu de ces problématiques, deux implémentations des vecteurs sont proposées par défaut parMCMAS, dont la représentation mémoire est illustrée sur la Figure 7.3 :
taille e1
e2
e3
etaille -1
e1
e2
e3
e4
Taille en début de tableau
Marqueur de fin
Figure 7.3 – Représentations de vecteurs proposées par MCMAS
— Une représentation basée sur un tableau statique contenant comme premier élément lenombre d’éléments stockés. Ce stockage au début du tableau est motivé par la nécessité
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 100
de disposer de cette information à un emplacement aisément déductible sans connaître lataille du vecteur.
— Une représentation basée sur un marqueur de fin. Cette représentation ne permet plus l’ac-cès direct à la taille du tableau, mais requiert un parcours du tableau pour obtenir cetteinformation. Ce parcours est rendu nécessaire dans le cas de l’application d’un traitementà chaque élément ou de la copie des données, et n’est donc pas pénalisant pour ce typed’opération. Il pose toutefois problème pour insérer ou récupérer un élément particulierdu tableau, s’il est nécessaire de procéder à la validité de l’indice indiqué par rapport auxlimites du tableau.
Collections
En complément des tableaux statiques, le langage Java propose un vaste ensemble de collec-tions, correspondant aux structures de données les plus connues et utilisées dans le domaine del’algorithmique :
— Listes simplement et doublement chaînées— Dictionnaires— Matrices— Piles, files...
Ces structures de données sont représentées en Java sous la forme de type objets dérivés de laclasse de base Collection, qui assure la disponibilité de nombreuses méthodes communes d’inser-tion, de suppression, de parcours des éléments ou de récupération de la taille.
Cette généricité des opérations facilite la conversion de ces collections vers et depuis des ta-bleaux statiques au niveau de MCMAS à l’aide d’un ensemble de primitives de conversion inté-grées à MCM. Les positions des individus dans le modèle proie-prédateur sont ainsi, dans notreimplémentation, basées sur une collection d’entiers convertie en tableau statique au niveau duGPU.
Grilles
Une structure souvent rencontrée dans les systèmes multi-agents est la grille. Suivant le typede modèle représenté, elle peut constituer l’ensemble des données (cas d’une implémentation dumodèle à base d’automates cellulaires) ou un simple moyen de discrétiser un espace de simulation(cas du modèle proie-prédateur).
La solution la plus directe pour représenter une telle structure dans de nombreux langages estl’utilisation de tableaux de tableaux, ou tableaux à plusieurs dimensions. Dans ce cas, l’accès auxdonnées est effectué au moyen d’une double indexation du contenu, du type tableau[x][y].
Cette implémentation n’est cependant pas directement possible en OpenCL du fait de la li-mitation des tableaux à une seule dimension. Dans ces circonstances, plusieurs implémentationsalternatives sont proposées par MCMAS, en fonction du type de grille et d’accès souhaités surGPU.
La solution la plus simple à cette limitation en nombre de dimensions est la linéarisation de lagrille sous forme d’un tableau à une dimension.
Dans ce cas, l’accès à l’élément situé aux coordonnées (x, y) du tableau revient au calcul d’ununique index basé sur ces deux dimensions, et la largeur ou hauteur de la grille, suivant le sens de
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 101
linéarisation retenu, en lignes ou en colonnes. Si x correspond à l’abscisse, y à l’ordonnée, l à lalargeur et L à la hauteur de la grille, cet index est calculé de la manière suivante :
1 / / Lin é a r i s a t i o n en l i g n e2 i = y * l + x
3
4 / / Lin é a r i s a t i o n en c o l o n n e5 i = x * L + y
Le calcul de cet index est pris en charge de manière transparente par les objets grilles offertspar MCMAS du côté CPU, et par un ensemble de directives de macro-processeur du côté del’exécution OpenCL.
La linéarisation des données est très efficace du point de vue des accès mémoire GPU car ellepermet de s’assurer que des éléments adjacents seront effectivement stockés à des emplacementsmémoires contigus ou à intervalles réguliers, de manière à pouvoir regrouper et profiter de la lar-geur des lectures mémoires sur cette architecture. Cette proximité des données permet d’optimiserl’exploitation des caches L1 et L2 intégrés aux matériels GPU récents, en assurant le stockage deces données voisines dans la même ligne de cache.
Cette linéarisation montre cependant ses limites dans le cas de grilles de faible densité, où ungrand nombre de cellules ne sont pas utilisées :
Consommation mémoire. La linéarisation de grilles de grande dimension impose au périphé-rique de disposer d’assez de mémoire contigüe pour stocker tous les éléments de la grille, mêmeinutilisés, là ou des implémentations Java peuvent être basées sur des structures creuses commedes collections.
Nombre d’accès. Si ce type de grille est très performant en accès, du fait de la simple nécessitéde calculer un index supplémentaire par rapport à un tableau statique et de la proximité des donnéesen mémoire, des opérations comme le calcul du nombre de cellules utilisées dans la grille ou touttraitement sur les cellules imposent un parcours de l’ensemble de la grille.
Cette utilisation inefficace de la mémoire pour des structures de faible densité est rendue obli-gatoire par l’impossibilité d’allouer de la mémoire depuis un programme OpenCL, ce qui imposeun dimensionnement de la structure très défensif, à même de gérer le pire des scénarios.
Une solution, dans ce cas, est d’employer d’autres représentations pour les grilles, où seulesles cases effectivement utilisées seront stockées de manière contigüe, plutôt que l’ensemble dela grille. Un grand nombre de formats [BG09] ont déjà été proposés pour la littérature pour cetype de matrices à faible densité, typiquement optimisés soit pour la création (DOK 3), soit pour leparcours et la modification de matrices (LIL 4, COO 5, CSR 6). Ces formats sont actuellement encours d’implémentation dans MCMAS.
7.3.3 Structures spécifiques
A côté des types courants en Java, MCMAS permet l’accès à deux types de données spécifiquesau GPU, les textures et les types vectoriels. Dans les sections suivantes, nous présentons leurprincipe et leur fonctionnement.
3. Dictionnaire de clés4. Liste de listes5. Liste de coordonnées6. Lignes creuses compressées
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 102
Textures
Ces structures, à l’origine graphique, sont représentées en OpenCL par des objets image asso-ciés à des dimensions et un format de stockage des pixels. Ce format de stockage indique le nombrede canaux stockés pour chaque pixel (rouge, vert, bleu, alpha...) ainsi que le type de donnée utilisépour la représentation de chaque canal (entier 8bits, 16bits ou flottant...)
Une même texture peut être employée dans plusieurs kernels OpenCL, mais ne peut être utiliséequ’en lecture ou en écriture par un même kernel. Cette limitation empêche son utilisation pour desdonnées agents qui seraient accessibles en entrée/sortie, mais permet son utilisation dans le cadrede mises à jour non destructives d’un paramètre d’entrée en lecture seule, où les modifications sontstockées dans un buffer résultat en écriture, comme c’est par exemple le cas dans le jeu de la vie.
Une autre restriction de ces textures tient au nombre limité de formats supportés, pour le sto-ckage des données, chaque canal étant prévu pour le stockage d’une composante entière ou flot-tante. Ces limitations de format empêchent le stockage de données en double précision, de struc-tures ou de plus de trois informations par pixel, contrairement aux types vectoriels ou au tableauxde structures permis par OpenCL.
L’utilisation de textures présente cependant plusieurs avantages :
— L’accès à ces objets est optimisé par un cache spécialisé sur toutes les architectures GPUsupportant OpenCL, comme nous l’avons vu dans la présentation de l’architecture mémoireGPU. Cet avantage est particulièrement employé dans le cas de modèles comme celui deproie-prédateur ou des automates cellulaires, où un nombre limité de propriétés doit êtrestocké par chaque case mais un accès rapide est indispensable.
— Contrairement aux tableaux, il est possible de déclarer des images à deux ou trois dimen-sions. Cet aspect multi-dimensionnel facilite l’accès à un élément particulier de la texturesans utilisation d’opérations supplémentaires évoquées dans le cas des vecteurs, et permetau concepteur d’associer directement la dimension des textures et le découpage de l’exécu-tion des données, de manière à simplifier son programme et exploiter au mieux la localitédes données dans chaque unité de traitement.
— Un dernier intérêt des textures, enfin, est la possibilité de les afficher directement de ma-nière graphique à l’aide des primitives d’intégration OpenGL offertes par OpenCL. Cettefonctionnalité est particulièrement intéressante dans le cadre de systèmes multi-agents, oùune forme d’affichage est souvent attendue pour faciliter le suivi de la simulation. L’ab-sence de transformation particulière est un avantage important dans le cas de modèles do-tés de grands nombres d’individus, où tout traitement représenterait une perte en tempsd’exécution pouvant être consacré à la simulation elle-même.
Types vectoriels
OpenCL complète l’ensemble de types primitifs hérités de C par des types vectoriels permettantde stocker dans une seule variable 2, 3, 4, 8 ou 16 données primitives de même type. Ces typesvectoriels, également présents sur d’autres modèles de programmation GPGPU comme CUDA,sont nativement supportés par de nombreuses opérations arithmétiques fournies par le modèle deprogrammation. Ce support permet, par exemple, d’effectuer un calcul de distances euclidiennesou une normalisation de vecteur sur GPU en stockant chaque élément sous la forme d’un seulparamètre.
L’accès aux membres de ces types vectoriels est possible en OpenCL à l’aide des champs x, y,z et w pour les quatre premiers éléments ou sous forme d’index numérique, tel qu’illustré par le

CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 103
Listing 7.1.
Listing 7.1 – Initialisation de données vectorielles OpenCL1 float4 pos = (float4) (0, 0, 0, 0);
2 pos.x = 1.0;
3 pos.s3 = 4.0;
Le standard OpenCL impose le support de ces alternatives vectorielles pour les types char,short, int, float et long et leurs variantes non signées. Chaque implémentation peut égalementfournir un support vectoriel pour les nombres réels de type double, en déclarant une extension, demanière analogue au mécanisme proposé par OpenCL.
Au-delà de la possibilité de stocker un ensemble de coordonnées dans une même variable, unautre intérêt important de ces types vectoriels est la facilité avec laquelle ils peuvent être compo-sés ou décomposés en OpenCL, en combinant les noms ou les index de champs de chaque côtéde l’opérateur d’affectation. De telles facilités rendent le changement de nombre de dimensionsd’une coordonnée, requis pour certaines opération agent, trivial en OpenCL, tel qu’illustré par leListing 7.2.
Listing 7.2 – Transtypage de données vectorielles OpenCL1 float2 pos1 = (float2) (1, 2);
2 float4 pos2 = (float4) (1, 3, 5, 0);
3 float2 pos4 = (float4) (0, 0, 0, 0);
4 pos4 = (float4) (pos1.xy, pos2.z}
L’utilisation de ces types dans MCMAS est rendue possible par le biais de la bibliothèque jocl-structs, proposée par les développeurs de JOCL, offrant l’accès à ces types sous forme d’objetsJava.
7.3.4 Exécution synchrone ou asynchrone
La plate-forme OpenCL est basée sur une soumission de l’ensemble des opérations à réalisersur le périphérique en file d’attente. Ce mode de fonctionnement permet au programme principalde poursuivre son exécution, et de consulter les résultats de sa soumission de manière ultérieure,grâce à un "ticket" retourné lors de la soumission.
Ce mécanisme est également intégré dans l’interface de bas-niveau de MCMAS, sous formed’objets événements Java implémentant l’interface standard Future, en plus des opérationsOpenCL spécialisées. Ces événements peuvent être alors manuellement utilisés pour choisir lemoment où synchroniser l’exécution des traitements, ou directement comme paramètres pour lasoumission de nouveaux traitements, de manière à créer un enchaînement d’actions OpenCL. Cemécanisme de dépendances peut par exemple être utilisé pour effectuer la copie de données avantet après le lancement d’un programme sans synchronisation intermédiaire, comme illustré par leListing 7.3.
Ce mécanisme, indispensable pour tirer parti du recouvrement permis par OpenCL entre opé-rations de copie des données et d’exécution, est exploité par de nombreux plugins offerts parMCMAS. Il peut également être mis à disposition au niveau de l’interface par le biais de variantesasynchrones des opérations proposées, de manière analogue à l’interface proposée par MPI pourla communication en mémoire distribuée.
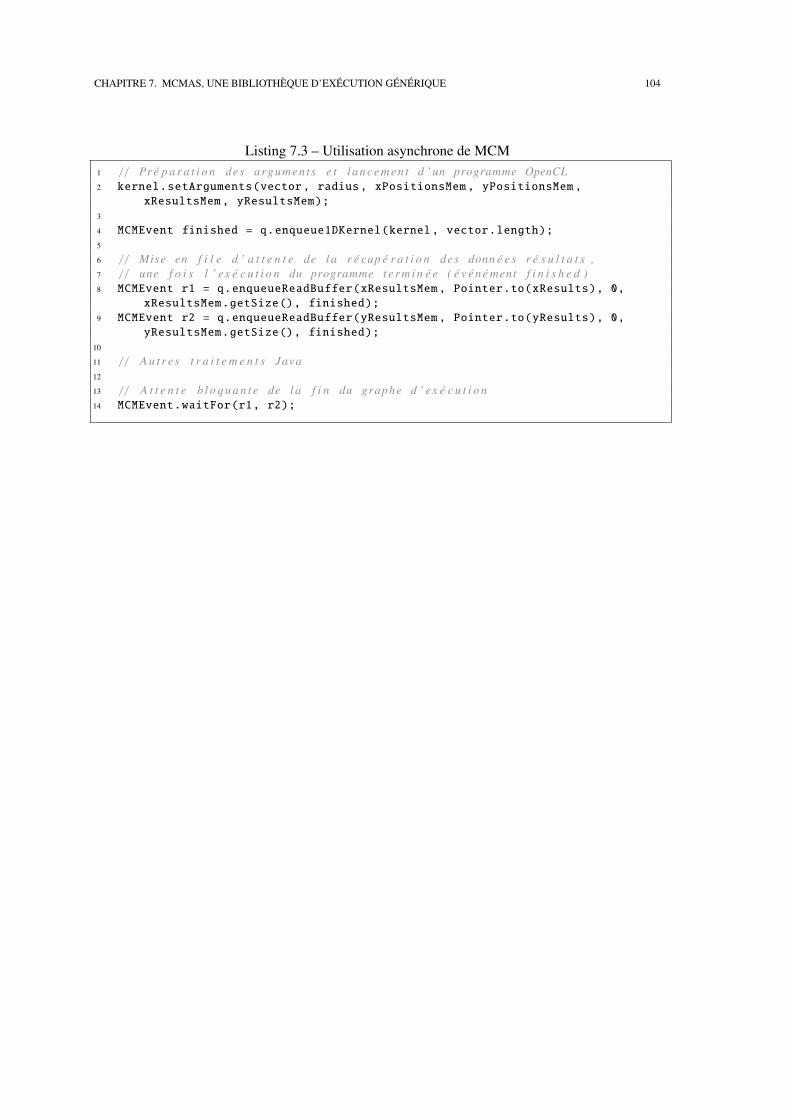
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 104
Listing 7.3 – Utilisation asynchrone de MCM1 / / Pr é p a r a t i o n des argument s e t l a n c e m e n t d ’ un programme OpenCL2 kernel.setArguments(vector, radius, xPositionsMem , yPositionsMem ,
xResultsMem , yResultsMem);
3
4 MCMEvent finished = q.enqueue1DKernel(kernel, vector.length);
5
6 / / Mise en f i l e d ’ a t t e n t e de l a r é cup é r a t i o n des donn é es r é s u l t a t s ,7 / / une f o i s l ’ ex é c u t i o n du programme t e r m i n é e ( é v é n é ment f i n i s h e d )8 MCMEvent r1 = q.enqueueReadBuffer(xResultsMem , Pointer.to(xResults), 0,
xResultsMem.getSize(), finished);
9 MCMEvent r2 = q.enqueueReadBuffer(yResultsMem , Pointer.to(yResults), 0,
yResultsMem.getSize(), finished);
10
11 / / A u t r e s t r a i t e m e n t s Java12
13 / / A t t e n t e b l o q u a n t e de l a f i n du graphe d ’ ex é c u t i o n14 MCMEvent.waitFor(r1, r2);
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 105
7.4 Utilisation de l’interface de haut niveau
Après nous être intéressés à son architecture, nous présentons dans cette section l’utilisation del’interface de haut niveau de notre bibliothèque, sans connaissance particulière de la programma-tion GPU. Cette utilisation est rendue possible à l’aide de deux structures principales : le contexted’exécution et un ou plusieurs plugins offrant l’accès aux fonctions de haut niveau de MCMAS.
7.4.1 Initialisation de MCMAS
L’interface de haut niveau de MCMAS est basée sur l’utilisation d’un contexte d’exécutionde type MCMASContext. Cet objet contient l’ensemble des structures nécessaires à la soumissiond’un traitement OpenCL, et admet différents constructeurs permettant au développeur d’indiquerle type et les paramètres d’exécution souhaités, tel que représenté dans le Listing 7.4.
Une fois instancié, un contexte MCMAS peut être utilisé pour créer et appeler des pluginsMCMAS. Ces deux modes d’utilisation peuvent être librement combinés pour un même contexte.
Listing 7.4 – Exemples de création de différents types de contexte MCMAS1 / / Aucun argument , s é l e c t i o n a u t o m a t i q u e de l a p l a t e − forme d ’ ex é c u t i o n par
MCMAS:2 / / GPU en p r i o r i t é , p u i s CPU.3 MCMASContext context = new MCMASContext()
4
5 / / Dé f i n i t i o n e x p l i c i t e de l a p r i o r i é t é des p l a t e − f o rm e s à u t i l i s e r :6 MCMASContext context = new MCMASContext(ContextType.GPU, ContextType.CPU)
7
8 / / Cr é a t i o n d ’ un c o n t e x t e GPU9 MCMASContext context = new MCMASContext(ContextType.GPU)
10
11 / / Cr é a t i o n d ’ un c o n t e x t e CPU12 MCMASContext context = new MCMASContext(ContextType.CPU)
13
14 / / Cr é a t i o n d ’ un c o n t e x t e s u p p o r t a n t l e p r o f i l i n g15 MCMASContext context = new MCMASContext(MCMAS.PROFILING);
7.4.2 Exemples d’appel de fonctions de haut niveau
Une fois un contexte MCMAS obtenu, il est possible de l’utiliser pour appeler de nombreusesfonctions de haut niveau regroupées sous forme de plugins spécialisés inclus dans la bibliothèque.
Chacun de ces plugins propose un ensemble de fonctions classées par thématique d’utilisation(calcul de distance, diffusion...) Ces fonctions admettent un certain nombre de paramètres d’entréeet de sortie correspondants au traitement à effectuer. L’accent est mis, au niveau de ces paramètresd’entrée, sur l’utilisation de tableaux statiques et d’autres structures Java standard, de manière àpermettre la plus large utilisation possible de ces fonctions.
Des outils de conversions fournis avec MCMAS facilitent le passage vers ces types depuis lesautres types de données référencés dans notre présentation précédente, et en particulier depuisdes objets, des buffers de données ou des objets. Nous illustrons dans la suite de cette sectionl’utilisation de certains des plugins fournis par notre bibliothèque.
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 106
Calcul de distances
Une première fonctionnalité rencontrée dans de nombreux systèmes multi-agents, dont le mo-dèle proie-prédateur, est le calcul de distances euclidiennes entre individus. Selon le type de mo-dèle employé, ce calcul peut être effectué en une, deux ou trois dimensions, sur des coordonnéesentières (grille) ou réelles.
L’obtention de ces distances implique généralement, sur CPU, le calcul séquentiel de cettedistance pour chaque couple d’agents présents dans le modèle, ou le calcul de ces distances à lavolée pour les seuls points utilisés.
Le calcul de ces distances pouvant être aisément effectué en parallèle, il est possible de réalisertous ces calculs en simultané avec MCMAS, en indiquant en entrée les coordonnées à considéreret en récupérant l’ensemble des distances comme résultat.
Les coordonnées des points d’entrée peuvent être spécifiées sous forme d’un tableau par dimen-sion à considérer (array_x, array_y, array_z), sous forme de tableau de structures coordonnées, ouencore sous forme de tableau de type vectoriel OpenCL tel que float2 ou float3, comme évoquéprécédemment.
Pour deux ensembles de M et N coordonnées d’entrée, le résultat de ce module est une grillecomprenant les distances euclidiennes entre chaque point du premier ensemble et chaque point dusecond ensemble, de dimension M × N, et de type compatible avec le stockage des coordonnéesd’entrée (entier, réel ou flottant).
Diffusion
Une autre opération souvent rencontrée dans les modèles multi-agents est la diffusion d’unequantité au sein d’un vecteur ou d’une grille. Ce mécanisme est souvent utilisé pour des mises àjour de l’environnement, de manière à simuler la diffusion de phéromones par exemple dans le casdu modèle des fourmis, ou de populations dans des modèles de reproduction d’individus dans unnouvel habitat.
Cette diffusion est caractérisée par plusieurs paramètres :
— Le nombre de dimensions considérées : le nombre de cellules voisines vers lesquelles dif-fuser est directement lié à la configuration du modèle. Dans un modèle à une dimension,avec des cellules en grille, seules deux voisines devront être considérées, contre six dans lecas de deux dimensions et vingt-six dans un cas à trois dimensions.
— La possibilité ou non de diffuser en diagonale : le calcul précédent suppose que l’ensembledes cellules voisines sont considérées. Si seules celles partageant une arête avec la cel-lule courante sont prises en compte (diffusion "en croix"), alors le nombre de voisins pourchaque cellule est modifié, ce qui peut changer drastiquement le comportement de la simu-lation.
Un autre choix important pour effectuer cette diffusion est le comportement devant être retenuaux limites de la grille, où certains voisins sont manquants :
— Une première approche est de supposer toute diffusion en dehors de la grille comme perdue.Ces frontières se comportent alors comme un puits sans fond, et peuvent amener une pertede matière dans le modèle (système non clos).
— Une autre approche est d’interdire la diffusion en dehors de la grille (système fermé). Cetteapproche est préférable dans le cadre d’un véritable environnement fermé, mais décon-
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 107
seillée dans le cas d’un modèle ne représentant qu’une fraction d’un environnement plusvaste, comme une parcelle de terrain d’un territoire, car elle introduit des frontières ar-tificielles pouvant influer sur le cycle d’évolution des agents situés à la périphérique dumodèle, sans que cette influence n’ait aucune base pratique.
— Une dernière approche, enfin, est de considérer l’environnement agent comme bouclantverticalement et horizontalement. Cette approche, souvent retenue pour des raisons decommodité, revient à représenter l’espace de simulation comme la projection d’un tore.
Le module diffusion de MCMAS fournit les opérations correspondant à ces différents cas. Cetteimplémentation est également basée sur l’utilisation de programmes OpenCL adaptés à chaquetype de données d’entrée (scalaire, structure ou vectoriel, entière ou flottante).
Le lancement d’une diffusion peut être effectué en quelques lignes, à l’aide des paramètresacceptés par la fonction, comme l’illustre le Listing 7.5.
Listing 7.5 – Exemple d’utilisation du plugin diffusion sur une grille de flottants représentée parun tableaux à deux dimensions1 / / Dé c l a r a t i o n des s t r u c t u r e s2 float [][] grille, grilleResultat;
3
4 / / I n s t a n t i a t i o n d ’ un c o n t e x t MCMAS e t du p l u g i n de d i f f u s i o n5 MCMASContext context = new MCMASContext();
6 DiffusePlugin diffuser = DiffusePlugin.newInstance(context);
7
8 / / Pr é p a r a t i o n des s t r u c t u r e s de donn é es MCMAS9 MCMASGrid input = MCMAS.createGridFrom(grille);
10 MCMASGrid output = MCMAS.createGridFrom(grilleResultat);
11
12 / / Lancement d ’ une d i f f u s i o n e t r é cup é r a t i o n du r é s u l t a t .13 / / D i f f u s e P l u g i n . DIMENSION_4 r e q u i e r t une d i f f u s i o n v e r t i c a l e e t h o r i z o n t a l e
:14 / / D i f f u s e P l u g i n . DIMENSION_8 p e r m e t t r a i t de demander l a p r i s e en compte des
d i a g o n a l e s .15 diffuser.diffuse(input, output, DiffusePlugin.DIMENSION_4);
16
17 / / Recop ie de l a g r i l l e o b t e n u e dans l a s t r u c t u r e j a v a o r i g i n a l e18 output.write(grilleResultat);
De nombreux modèles agents imposent également des limites minimales et maximales particu-lières à la valeur pouvant être stockée dans chaque cellule. Ces limitations sont prises en comptepar le plugin diffusion fourni par MCMAS via la disponibilité de variantes bornées des opérationsprécédentes, permettant d’indiquer la valeur minimale et la valeur maximale permises pour chaquecellule.
Cette opération de normalisation peut également être effectuée à l’aide d’un plugin spécialiséfourni par MCMAS, de manière indépendante.
Réduction
De très nombreuses simulations agents requièrent la production régulière d’indicateurs associésau modèle, comme la quantité globale d’énergie présente dans le système ou la population dansle modèle proie-prédateur. La dispersion de ces quantités entre les différents éléments du modèleimplique, à chaque itération, de pouvoir synthétiser ces quantités dans une variable globale, àmême d’être affichée ou utilisée pour interrompre ou non la simulation.

CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 108
Des modèles de programmation CPU tels que OpenMP ou MPI facilitent cette opération àl’aide de primitives de réduction, permettant au concepteur d’indiquer les données devant êtreréduites et l’opération à utiliser (somme, minimum, maximum...)
MCMAS reprend cette logique dans un plugin spécialisé permettant d’effectuer cette réductionen parallèle à l’aide des informations suivantes :
— Le champ de la réduction : un vecteur ou une grille contenant la propriété du modèle agentsà prendre en compte.
— L’opération de réduction : minimum, maximum, moyenne, addition, multiplication...
Le résultat d’une réduction totale est un type scalaire, et un vecteur pour une réduction partielle.Comme dans le cadre d’une diffusion, le type résultat est compatible avec le type d’entrée : flottant,par exemple, pour une réduction sur des données flottantes.
Fonctions affines
Un autre type de traitement parallélisable est, comme nous l’avons vu dans le cas du modèleproie-prédateur, l’application d’une même fonction affine a × x + b à chaque cellule d’un vecteurou d’une grille d’entrée.
Cette opération est directement supportée par MCMAS sur ces deux structures de données, unvecteur pouvant être considéré comme une grille à une dimension. Le Listing 7.6 illustre l’appeldu plugin effectué pour la croissance de l’herbe dans le cadre du modèle proie-prédateur.
Listing 7.6 – Application d’une fonction affine sur les éléments d’une grille1 / / Dé c l a r a t i o n des s t r u c t u r e s2 float [][] grille, grilleResultat;
3
4 / / I n s t a n t i a t i o n d ’ un c o n t e x t MCMAS e t du p l u g i n de d i f f u s i o n5 MCMASContext context = new MCMASContext();
6 DiffusePlugin transformer = AXBPlugin.newInstance(context);
7
8 / / Pr é p a r a t i o n des s t r u c t u r e s de donn é es MCMAS9 MCMASGrid input = MCMAS.createGridFrom(grille);
10 MCMASGrid output = MCMAS.createGridFrom(grilleResultat);
11
12 / / Lancement de l a t r a n s f o r m a t i o n e t r é cup é r a t i o n du r é s u l t a t .13 / / a v a u t 1 . 0 , car aucun f a c t e u r v a r i a b l e de c r o i s s a n c e n ’ e s t a p p l i q u é .14 / / b v a u t GRASS_GROWTH, l e t a u x de c r o i s s a n c e f i x e d é f i n i dans l a s i m u l a t i o n
.15 transformer.transform(input, output, 1.0, GRASS_GROWTH);
16
17 / / Recop ie de l a g r i l l e o b t e n u e dans l a s t r u c t u r e j a v a o r i g i n a l e18 output.write(grilleResultat);
7.4.3 Utilisation depuis des framework multi-agents existants
La bibliothèque MCMAS est utilisable directement en Java, mais doit également pouvoir êtreaccessible à des plates-formes multi-agents ne permettant pas l’accès direct à ce langage.
Dans ce cas, il est possible de fournir le service assurant le rôle d’interlocuteur et de traducteurentre le formalisme utilisé par la plate-forme et MCMAS. Ce service peut être un agent du système
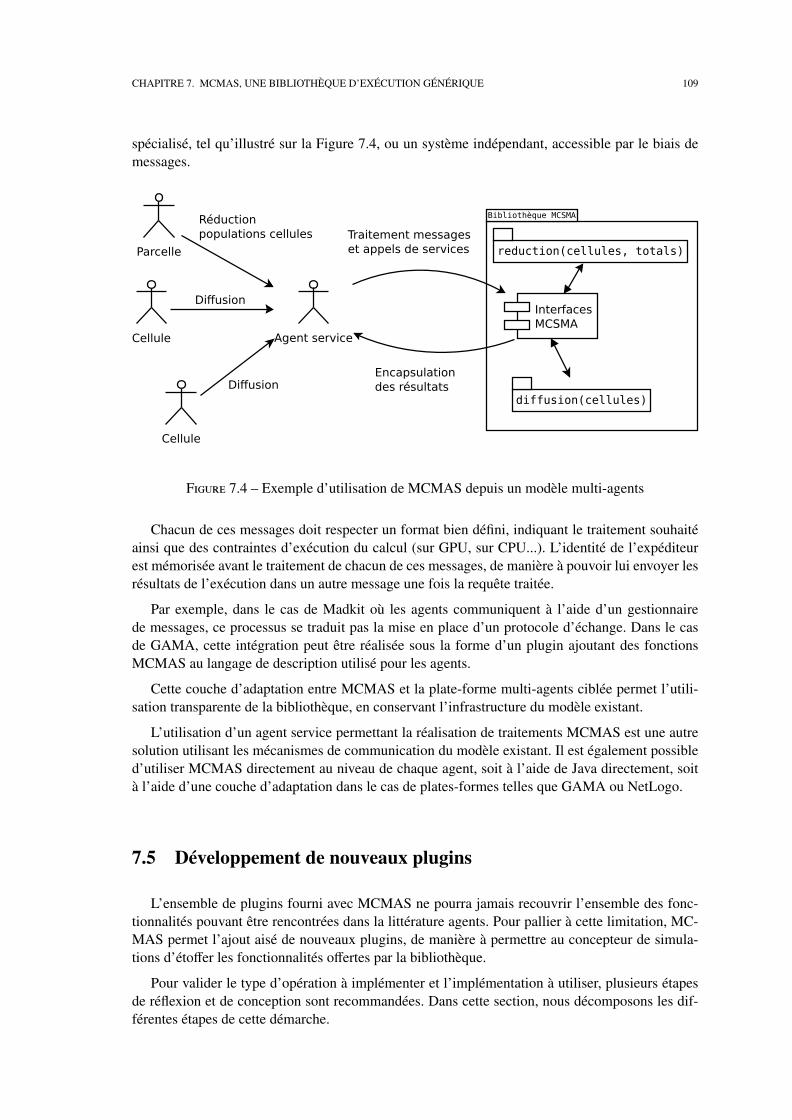
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 109
spécialisé, tel qu’illustré sur la Figure 7.4, ou un système indépendant, accessible par le biais demessages.
Bibliothèque MCSMA
Parcelle
Agent service
InterfacesMCSMA
Cellule
Cellule
Diffusion
Diffusion
Réductionpopulations cellules
diffusion(cellules)
reduction(cellules, totals)
Traitement messageset appels de services
Encapsulationdes résultats
Figure 7.4 – Exemple d’utilisation de MCMAS depuis un modèle multi-agents
Chacun de ces messages doit respecter un format bien défini, indiquant le traitement souhaitéainsi que des contraintes d’exécution du calcul (sur GPU, sur CPU...). L’identité de l’expéditeurest mémorisée avant le traitement de chacun de ces messages, de manière à pouvoir lui envoyer lesrésultats de l’exécution dans un autre message une fois la requête traitée.
Par exemple, dans le cas de Madkit où les agents communiquent à l’aide d’un gestionnairede messages, ce processus se traduit pas la mise en place d’un protocole d’échange. Dans le casde GAMA, cette intégration peut être réalisée sous la forme d’un plugin ajoutant des fonctionsMCMAS au langage de description utilisé pour les agents.
Cette couche d’adaptation entre MCMAS et la plate-forme multi-agents ciblée permet l’utili-sation transparente de la bibliothèque, en conservant l’infrastructure du modèle existant.
L’utilisation d’un agent service permettant la réalisation de traitements MCMAS est une autresolution utilisant les mécanismes de communication du modèle existant. Il est également possibled’utiliser MCMAS directement au niveau de chaque agent, soit à l’aide de Java directement, soità l’aide d’une couche d’adaptation dans le cas de plates-formes telles que GAMA ou NetLogo.
7.5 Développement de nouveaux plugins
L’ensemble de plugins fourni avec MCMAS ne pourra jamais recouvrir l’ensemble des fonc-tionnalités pouvant être rencontrées dans la littérature agents. Pour pallier à cette limitation, MC-MAS permet l’ajout aisé de nouveaux plugins, de manière à permettre au concepteur de simula-tions d’étoffer les fonctionnalités offertes par la bibliothèque.
Pour valider le type d’opération à implémenter et l’implémentation à utiliser, plusieurs étapesde réflexion et de conception sont recommandées. Dans cette section, nous décomposons les dif-férentes étapes de cette démarche.
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 110
7.5.1 Conception du modèle et parallélisation
La première étape du développement d’un nouveau plugin est la définition du problème ren-contré et de sa portée exacte. Un système multi-agents peut représenter un ensemble d’individus etde comportements complexes, se prêtant ou non à une adaptation sur GPU. Il est alors dans ce casnécessaire de déterminer les parties du modèle pouvant tirer avantage d’une exécution sur GPU,ainsi que la manière de paralléliser ces traitements.
Un élément important pour évaluer les gains pouvant être attendus de la parallélisation avecMCMAS est d’évaluer l’impact en termes de performance des parties du modèle pouvant être ac-célérées par rapport au temps total d’exécution de la simulation, en application de la loi d’Amdahl.Une conséquence directe de cette loi est que tout gain obtenu par l’utilisation d’une plate-formeest rapidement limité si la portion parallélisée ne représente pas une fraction significative du tempsd’exécution de la simulation multi-agents. Le découpage du modèle en sous-parties peut même,dans ce cas, entraîner une perte de performance liée aux échanges de données entre les différentesportions de l’algorithme.
Il est donc nécessaire, en développant un nouveau plugin MCMAS, d’avoir à l’esprit ces li-mitations et une estimation du gain de performance pouvant être attendu, ainsi que le nombrede recours à cette simulation, de manière à pouvoir quantifier le temps pouvant être consacré àune adaptation GPU du modèle par rapport au temps supplémentaire qui aurait été utilisé avecl’ancienne implémentation.
L’efficacité d’exécution d’un programme sur GPU est directement liée aux opérations et auxstructures utilisées, mais n’est pas linéaire en termes d’efforts. La recherche de performance est unprocessus sans fin tendant toujours vers une limite où les adaptations à effectuer ne permettent plusde gains en performance très importants. Nos cas d’applications illustrent particulièrement qu’unportage à l’identique d’un algorithme ne permet que rarement l’obtention de bonnes performances,pour des raisons d’occupation processeur, de synchronisation ou de mémoire.
Un autre aspect critique de l’efficacité de l’utilisation du GPU, déjà évoqué dans notre pré-sentation du découpage d’une simulation en OpenCL, est le niveau de granularité retenu par lasimulation, c’est à dire la taille en temps passé sur chaque plate-forme. Une parallélisation “à grosgrains” permet de réduire le nombre d’échanges entre les deux plate-formes, et donc les coûtsde synchronisation ou de communication associés ces échanges. Au contraire, une parallélisationdite “à petits grains” implique le lancement de nombreux traitements simultanés sur GPU, pourminimiser l’impact des échanges plus réguliers devant avoir lieu.
7.5.2 Définition de l’interface et des fonctionnalités
Une fois la problématique et la solution précisément connues, il est nécessaire de définir lamanière dont la parallélisation pourra être intégrée dans le modèle existant. Cette intégration porteà la fois sur les scénarios d’exécution, et les données manipulées :
— Dans quel ordre les opérations seront-elles appelées ? Est-il possible de se servir de cetteinformation pour rendre les traitements asynchrones ou de changer leur ordre d’exécution ?
— Quelles structures de données sont-elles utilisées ? Doivent-elles être transformées pourune exécution sur GPU ? Peuvent-elles être partagées entre un maximum de traitements,pour éviter des copies ?
Ces deux problématiques, complémentaires, ont une importance vitale pour la définition del’interface du nouveau plugin, et plus particulièrement sur le nombre et le prototype des opérations
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 111
fournies.
7.5.3 Implémentation de la solution retenue
Une fois l’interface du plugin définie, il est possible de réaliser l’implémentation de la solutionelle-même. Dans MCMAS, cette implémentation met en jeu deux langages différents :
— Java pour l’ensemble des traitements exécutés sur CPU. Dans le cadre d’un plugin, cestraitements comprennent au minimum la gestion de la copie et des lancements des traite-ments sur la plate-forme OpenCL, ainsi que le suivi de l’exécution et la récupération desrésultats. Cette partie peut également inclure des pré-traitements sur les données, soit dansle cadre de conversions de représentations, soit parce que ces traitements sont peu adaptésà une exécution sur GPU. Le reste du modèle multi-agents n’est pas nécessairement réaliséen Java, si une interface d’adaptation MCMAS est utilisée.
— OpenCL est utilisé pour tous les traitements ayant lieu sur le périphérique. Comme C etC++, ce langage permet l’inclusion de portions de programmes existantes au moment dela compilation. Cette fonctionnalité est utilisée par MCMAS pour fournir de nombreuxraccourcis pour la manipulation des structures de données incluses dans MCMAS, et per-met également au plugin de partager des fonctionnalités entre ses traitements natifs. Il estimportante de noter que tout lancement de programme OpenCL implique de définir expli-citement le point d’entrée (kernel) utilisé : il est donc toujours possible d’implémenter tousles traitements du plugin dans un unique fichier source OpenCL.
Si OpenCL permet le stockage de binaires correspondant à des programmes compilés, les bi-naires obtenus sont spécifiques à l’implémentation et au matériel courant. Ce mécanisme permetd’éviter de multiples compilations au-delà de la première exécution, et ainsi de réduire le tempsde chargement du programme, mais ne dispense pas le développeur du plugin de devoir fournirle code source des portions OpenCL de son programme, en cas de distribution sur de nombreusesplates-formes.
Le plugin obtenu peut être directement inclus dans l’arborescence de fichiers sources du modèlemulti-agents y ayant recours, ou empaqueté sous forme d’archive JAR indépendante, de manière àfaciliter son partage et sa distribution.
La distribution d’une documentation et de tests associés au nouveau plugin est fortement re-commandée. La rédaction de ces tests est facilitée par la disponibilité de nombreuses fonctionsde création de contextes et de récupération d’informations, en termes de plate-forme d’exécutionet de temps au niveau de MCMAS. La création d’un contexte simple CPU, GPU, avec ou sansactivation des fonctionnalités de profiling, est ainsi possible en une ligne.
7.5.4 Validation
Une fois le développement du plugin terminé, une validation de celui-ci est requise. Cettevalidation regroupe deux aspects :
— La validation de l’exactitude des résultats. Cette première étape, critique, consiste às’assurer que les résultats obtenus sont similaires à ceux prévus par le modèle théoriqueou observés dans l’implémentation originale. Elle peut être effectuée de manière formelle,dans le cas où l’équivalence sémantique avant et après adaptation peut être établie. Lerecours au parallélisme tend cependant à introduire de nombreuses inconnues dans ce typede démonstration, qu’il est nécessaire de quantifier. Ces difficultés favorisent une validation
CHAPITRE 7. MCMAS, UNE BIBLIOTHÈQUE D’EXÉCUTION GÉNÉRIQUE 112
expérimentale, bouclant d’une certaine manière le cycle de pensée agent : dans ce cas, lesrésultats obtenus par les deux implémentations sont comparées dans le cadre d’un protocoleexpérimental prenant en compte les cas limites, les données et les conditions d’utilisationdevant être envisagées.
— La validation des performances obtenues. Cette seconde étape permet de quantifierles performances effectivement observées par rapport à l’implémentation originale et auxéventuelles attentes basées sur les caractéristiques de la solution retenue et de la plate-forme, comme le nombre de cœurs. Elle ne peut être qu’expérimentale, à l’aide de mesuresde temps d’exécution des simulations. La comparaison de ces temps, et l’allure des courbesde performance obtenue, permet de caractériser le type de comportement obtenu en termesde performance et de ressources consommées. Ces résultats peuvent, ou non, conforter lesattentes établies au moment de la conception du plugin. Ils permettent également de mettreen avant des parties coûteuses ou mal adaptées de l’algorithme dont l’impact aurait pu êtrenégligé ou sous-estimé, pouvant relancer une itération supplémentaire de parallélisation.
7.6 Synthèse
Dans ce chapitre, nous avons présenté MCMAS, notre bibliothèque dont l’objectif est deprendre en charge deux scénarios d’utilisation, l’utilisation du GPU au moyen de fonctions gé-nériques sans connaissance de l’architecture ou le développement de nouveaux traitements GPU.
Ce double usage est à l’origine du choix d’une architecture modulaire pour MCMAS, ba-sée d’une part sur une interface de bas niveau, MCM, pour l’accès au modèle de programma-tion OpenCL et d’autre part sur un ensemble de plugins regroupant des traitements agents pré-implémentés. Ces plugins reposent également sur l’interface MCM, pour favoriser la combinaisondes deux types d’utilisation ou l’expérimentation de nouveaux traitements.
Cette architecture se retrouve également dans l’implémentation de la bibliothèque. Elle estbasée sur trois parties fondamentales :
— Un contexte d’exécution encapsulant tout l’environnement d’exécution GPU.— Un ensemble de structures de données GPU et d’outils de conversion de ces structures vers
et depuis des structures de données Java.— Une interface de programmation MCM reprenant les principaux concepts OpenCL mais en
facilitant la gestion dans un environnement objet.
Nous avons ensuite abordé l’utilisation de MCMAS selon chacun de ces deux scénarios d’uti-lisation :
— Sans connaissance GPU. Dans ce cas, l’utilisation de l’interface de haut niveau MCMASest possible simplement au moyen de la création d’un contexte d’exécution, suivie de l’ins-tantiation d’un ou plusieurs plugins avec ce contexte. Les fonctions fournies par ces pluginspeuvent alors être utilisées pour lancer des opérations comme des calculs de déplacements,de distances, ou de transformations matricielles.
— Avec des connaissances GPU, pour le développement de nouveaux traitements avec MCM.Ce type d’utilisation permet alors, de manière optionnelle, l’encapsulation de ces traite-ments dans un plugin MCMAS de manière à favoriser leur redistribution et leur réutilisa-tion dans d’autres simulations multi-agents.
8Validation sur des modeles existants
Dans le chapitre précédent, nous avons présenté notre bibliothèque MCMAS, ainsi que sesdeux scénarios d’utilisation, par le biais d’une interface de bas niveau MCM, ou au moyen defonctions génériques fournies par un ensemble de plugins. Pour valider son utilisation sur des casconcrets, nous illustrons dans ce chapitre son utilisation sur trois exemples de systèmes multi-agents concrets : le modèle proie-prédateur, qui nous a servi de fil rouge à la présentation deMCMAS, un modèle de simulation de l’évolution microscopique des sols, MIOR, et enfin unmodèle de diffusion de populations, le modèle Collemboles.
Dans une première section, nous commençons par présenter les deux modèles n’ayant pas en-core été évoqué, ainsi que la manière dont nous avons choisi de les paralléliser avec MCMAS.Dans une seconde section, nous présentons ensuite les performances obtenues sur ces trois adap-tations. Pour cela, nous commençons par décrire les plates-formes d’exécution et le protocoleutilisés, avant d’analyser les performances obtenues. Nous synthétisons enfin, dans la troisièmesection, les observations et les recommandations pour une parallélisation sur GPU qu’il nous a étépossible de tirer de ces trois adaptations.
8.1 Parallélisation de modèles
L’étude de ces trois modèles a été l’occasion d’appliquer plusieurs approches de parallélisationparmi celles évoquées dans le Chapitre 6. Pour le modèle proie-prédateur, nous avons choisi uneimplémentation reposant sur l’utilisation de plugins génériques fournis par MCMAS pour paral-léliser certains traitements coûteux de la simulation. Pour le modèle MIOR, nous avons choisi deréaliser un nouveau plugin MCMAS pouvant être utilisé pour lancer de nombreuses simulationsmicroscopiques. Enfin, pour le modèle Collemboles, nous avons utilisé l’interface de bas niveauMCM pour implémenter chaque étape de la simulation sur GPU.
8.1.1 Proie-prédateur
Dans la continuité de notre réflexion sur ce modèle, dans le chapitre 5, nous avons choisi d’im-plémenter la mise à jour des ressources végétales de l’environnement et le déplacement des in-dividus proies et prédateurs à l’aide des plugins génériques de transformation de données et derecherche dans une grille proposés par l’interface de haut niveau de notre bibliothèque.
Cette implémentation est basée sur l’algorithme 1. Deux plugins fournis par MCMAS sont misà contribution :
— Le plugin de fonction affine est utilisé pour l’ensemble de la mise à jour de la grille re-
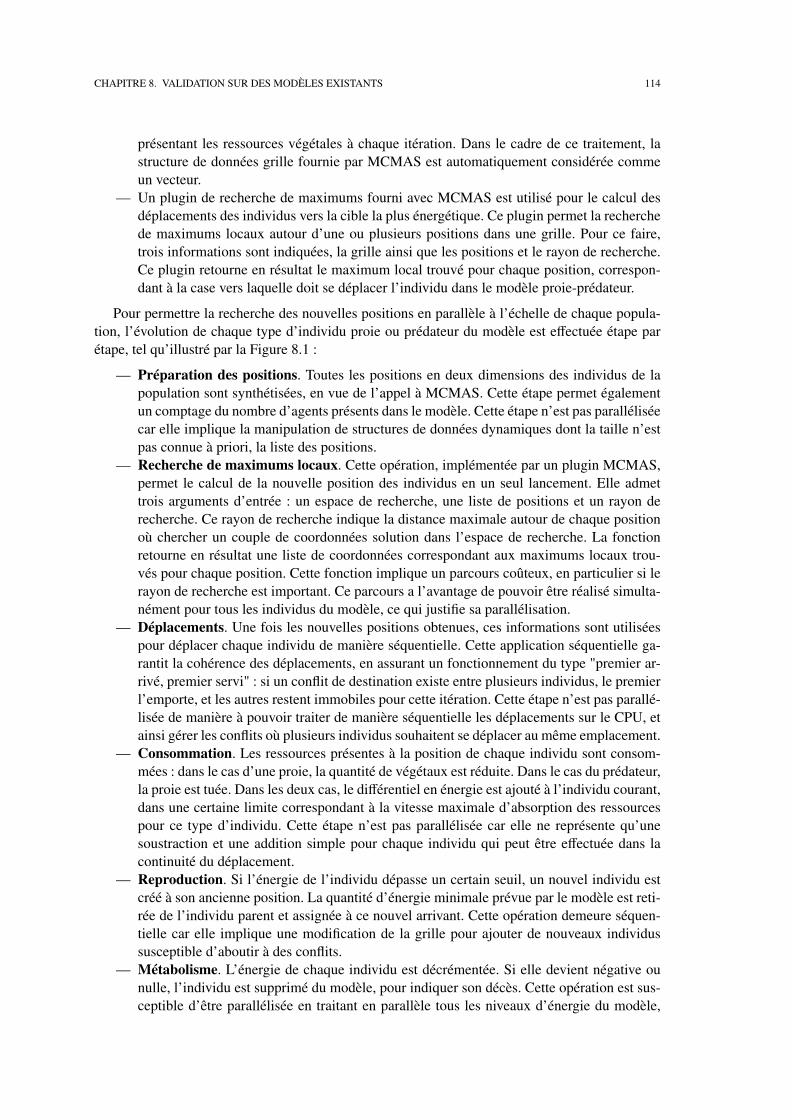
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 114
présentant les ressources végétales à chaque itération. Dans le cadre de ce traitement, lastructure de données grille fournie par MCMAS est automatiquement considérée commeun vecteur.
— Un plugin de recherche de maximums fourni avec MCMAS est utilisé pour le calcul desdéplacements des individus vers la cible la plus énergétique. Ce plugin permet la recherchede maximums locaux autour d’une ou plusieurs positions dans une grille. Pour ce faire,trois informations sont indiquées, la grille ainsi que les positions et le rayon de recherche.Ce plugin retourne en résultat le maximum local trouvé pour chaque position, correspon-dant à la case vers laquelle doit se déplacer l’individu dans le modèle proie-prédateur.
Pour permettre la recherche des nouvelles positions en parallèle à l’échelle de chaque popula-tion, l’évolution de chaque type d’individu proie ou prédateur du modèle est effectuée étape parétape, tel qu’illustré par la Figure 8.1 :
— Préparation des positions. Toutes les positions en deux dimensions des individus de lapopulation sont synthétisées, en vue de l’appel à MCMAS. Cette étape permet égalementun comptage du nombre d’agents présents dans le modèle. Cette étape n’est pas paralléliséecar elle implique la manipulation de structures de données dynamiques dont la taille n’estpas connue à priori, la liste des positions.
— Recherche de maximums locaux. Cette opération, implémentée par un plugin MCMAS,permet le calcul de la nouvelle position des individus en un seul lancement. Elle admettrois arguments d’entrée : un espace de recherche, une liste de positions et un rayon derecherche. Ce rayon de recherche indique la distance maximale autour de chaque positionoù chercher un couple de coordonnées solution dans l’espace de recherche. La fonctionretourne en résultat une liste de coordonnées correspondant aux maximums locaux trou-vés pour chaque position. Cette fonction implique un parcours coûteux, en particulier si lerayon de recherche est important. Ce parcours a l’avantage de pouvoir être réalisé simulta-nément pour tous les individus du modèle, ce qui justifie sa parallélisation.
— Déplacements. Une fois les nouvelles positions obtenues, ces informations sont utiliséespour déplacer chaque individu de manière séquentielle. Cette application séquentielle ga-rantit la cohérence des déplacements, en assurant un fonctionnement du type "premier ar-rivé, premier servi" : si un conflit de destination existe entre plusieurs individus, le premierl’emporte, et les autres restent immobiles pour cette itération. Cette étape n’est pas parallé-lisée de manière à pouvoir traiter de manière séquentielle les déplacements sur le CPU, etainsi gérer les conflits où plusieurs individus souhaitent se déplacer au même emplacement.
— Consommation. Les ressources présentes à la position de chaque individu sont consom-mées : dans le cas d’une proie, la quantité de végétaux est réduite. Dans le cas du prédateur,la proie est tuée. Dans les deux cas, le différentiel en énergie est ajouté à l’individu courant,dans une certaine limite correspondant à la vitesse maximale d’absorption des ressourcespour ce type d’individu. Cette étape n’est pas parallélisée car elle ne représente qu’unesoustraction et une addition simple pour chaque individu qui peut être effectuée dans lacontinuité du déplacement.
— Reproduction. Si l’énergie de l’individu dépasse un certain seuil, un nouvel individu estcréé à son ancienne position. La quantité d’énergie minimale prévue par le modèle est reti-rée de l’individu parent et assignée à ce nouvel arrivant. Cette opération demeure séquen-tielle car elle implique une modification de la grille pour ajouter de nouveaux individussusceptible d’aboutir à des conflits.
— Métabolisme. L’énergie de chaque individu est décrémentée. Si elle devient négative ounulle, l’individu est supprimé du modèle, pour indiquer son décès. Cette opération est sus-ceptible d’être parallélisée en traitant en parallèle tous les niveaux d’énergie du modèle,
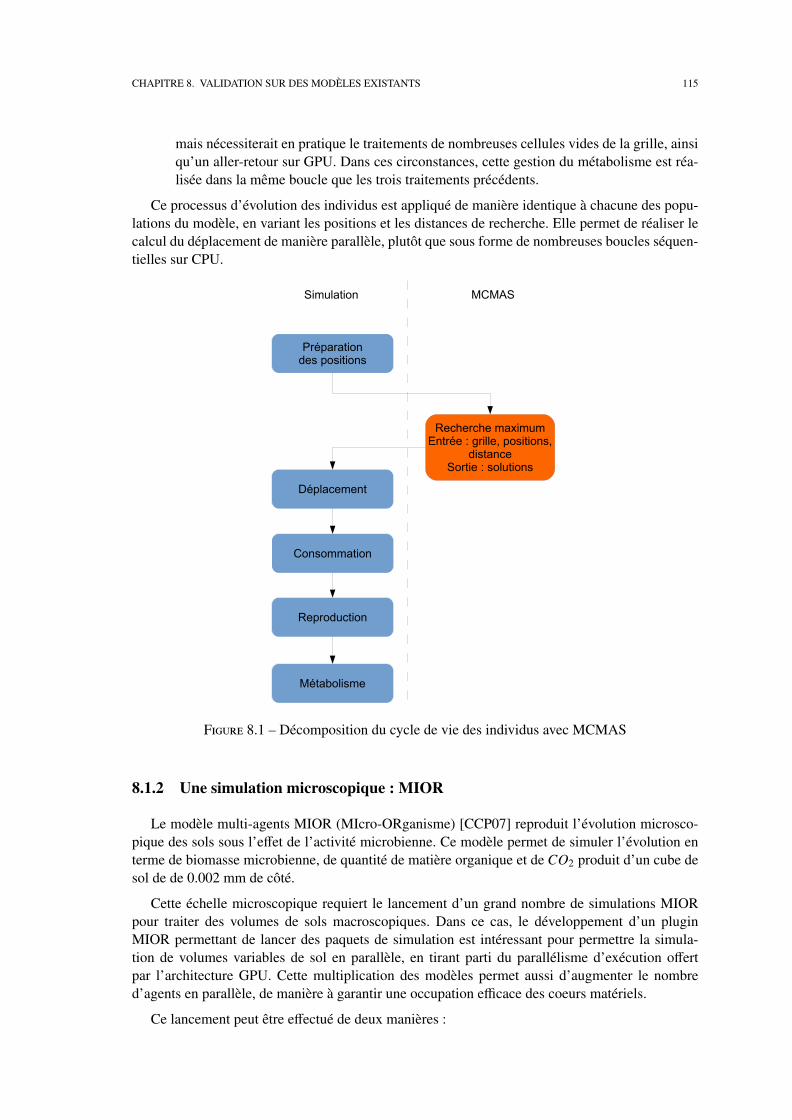
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 115
mais nécessiterait en pratique le traitements de nombreuses cellules vides de la grille, ainsiqu’un aller-retour sur GPU. Dans ces circonstances, cette gestion du métabolisme est réa-lisée dans la même boucle que les trois traitements précédents.
Ce processus d’évolution des individus est appliqué de manière identique à chacune des popu-lations du modèle, en variant les positions et les distances de recherche. Elle permet de réaliser lecalcul du déplacement de manière parallèle, plutôt que sous forme de nombreuses boucles séquen-tielles sur CPU.
Reproduction
Recherche maximumEntrée : grille, positions,
distanceSortie : solutions
Préparationdes positions
Déplacement
Métabolisme
Simulation MCMAS
Consommation
Figure 8.1 – Décomposition du cycle de vie des individus avec MCMAS
8.1.2 Une simulation microscopique : MIOR
Le modèle multi-agents MIOR (MIcro-ORganisme) [CCP07] reproduit l’évolution microsco-pique des sols sous l’effet de l’activité microbienne. Ce modèle permet de simuler l’évolution enterme de biomasse microbienne, de quantité de matière organique et de CO2 produit d’un cube desol de de 0.002 mm de côté.
Cette échelle microscopique requiert le lancement d’un grand nombre de simulations MIORpour traiter des volumes de sols macroscopiques. Dans ce cas, le développement d’un pluginMIOR permettant de lancer des paquets de simulation est intéressant pour permettre la simula-tion de volumes variables de sol en parallèle, en tirant parti du parallélisme d’exécution offertpar l’architecture GPU. Cette multiplication des modèles permet aussi d’augmenter le nombred’agents en parallèle, de manière à garantir une occupation efficace des coeurs matériels.
Ce lancement peut être effectué de deux manières :
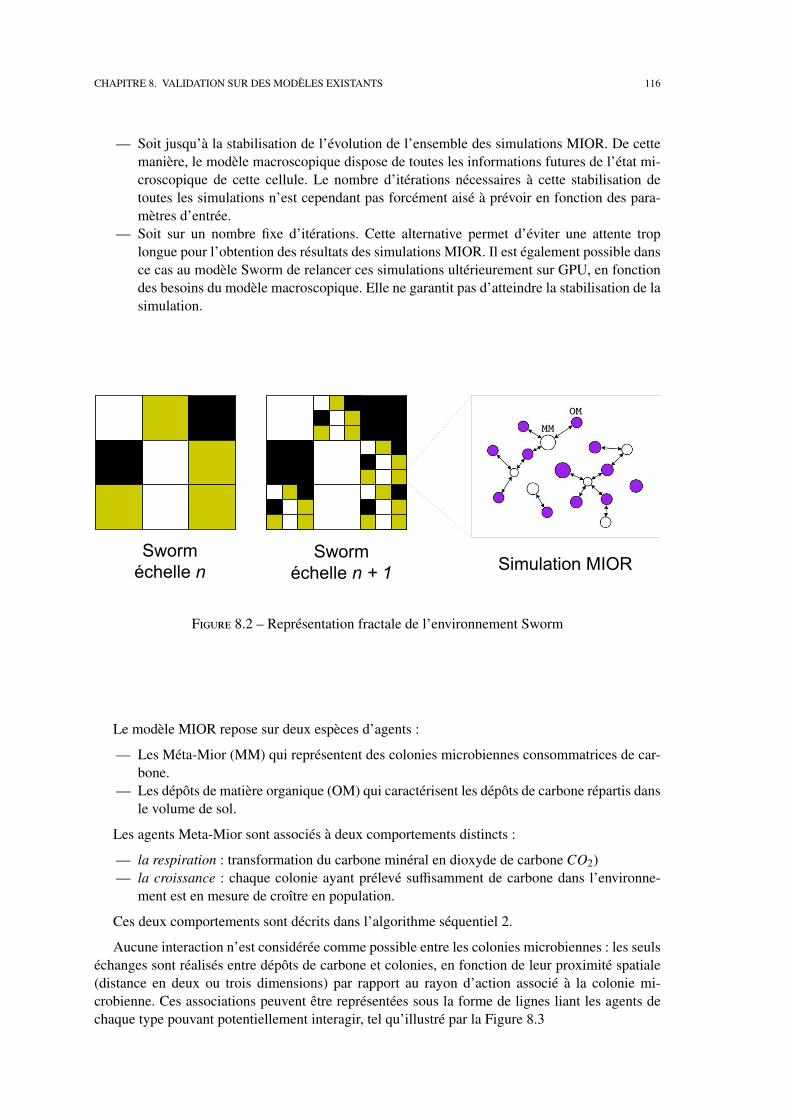
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 116
— Soit jusqu’à la stabilisation de l’évolution de l’ensemble des simulations MIOR. De cettemanière, le modèle macroscopique dispose de toutes les informations futures de l’état mi-croscopique de cette cellule. Le nombre d’itérations nécessaires à cette stabilisation detoutes les simulations n’est cependant pas forcément aisé à prévoir en fonction des para-mètres d’entrée.
— Soit sur un nombre fixe d’itérations. Cette alternative permet d’éviter une attente troplongue pour l’obtention des résultats des simulations MIOR. Il est également possible dansce cas au modèle Sworm de relancer ces simulations ultérieurement sur GPU, en fonctiondes besoins du modèle macroscopique. Elle ne garantit pas d’atteindre la stabilisation de lasimulation.
Sworm
échelle n
Sworm
échelle n + 1Simulation MIOR
Figure 8.2 – Représentation fractale de l’environnement Sworm
Le modèle MIOR repose sur deux espèces d’agents :
— Les Méta-Mior (MM) qui représentent des colonies microbiennes consommatrices de car-bone.
— Les dépôts de matière organique (OM) qui caractérisent les dépôts de carbone répartis dansle volume de sol.
Les agents Meta-Mior sont associés à deux comportements distincts :
— la respiration : transformation du carbone minéral en dioxyde de carbone CO2)— la croissance : chaque colonie ayant prélevé suffisamment de carbone dans l’environne-
ment est en mesure de croître en population.
Ces deux comportements sont décrits dans l’algorithme séquentiel 2.
Aucune interaction n’est considérée comme possible entre les colonies microbiennes : les seulséchanges sont réalisés entre dépôts de carbone et colonies, en fonction de leur proximité spatiale(distance en deux ou trois dimensions) par rapport au rayon d’action associé à la colonie mi-crobienne. Ces associations peuvent être représentées sous la forme de lignes liant les agents dechaque type pouvant potentiellement interagir, tel qu’illustré par la Figure 8.3
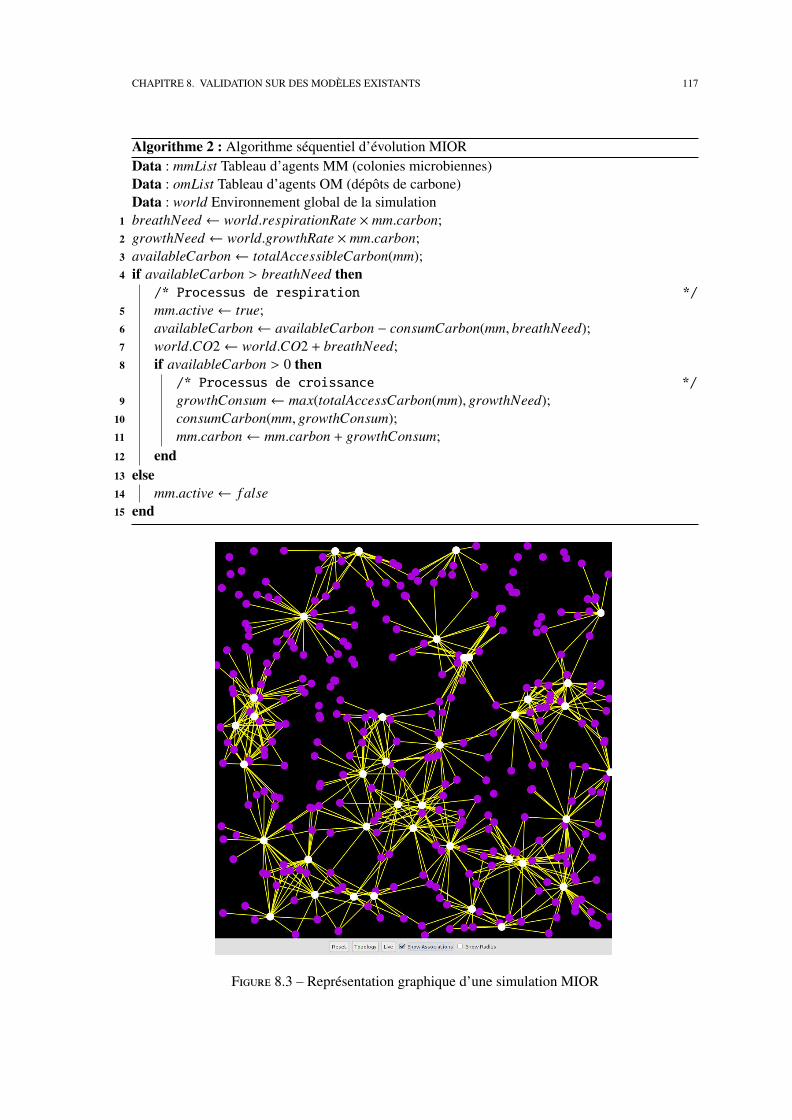
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 117
Algorithme 2 : Algorithme séquentiel d’évolution MIORData : mmList Tableau d’agents MM (colonies microbiennes)Data : omList Tableau d’agents OM (dépôts de carbone)Data : world Environnement global de la simulation
1 breathNeed ← world.respirationRate × mm.carbon;2 growthNeed ← world.growthRate × mm.carbon;3 availableCarbon← totalAccessibleCarbon(mm);4 if availableCarbon > breathNeed then
/* Processus de respiration */
5 mm.active← true;6 availableCarbon← availableCarbon − consumCarbon(mm, breathNeed);7 world.CO2← world.CO2 + breathNeed;8 if availableCarbon > 0 then
/* Processus de croissance */
9 growthConsum← max(totalAccessCarbon(mm), growthNeed);10 consumCarbon(mm, growthConsum);11 mm.carbon← mm.carbon + growthConsum;12 end13 else14 mm.active← f alse15 end
Figure 8.3 – Représentation graphique d’une simulation MIOR
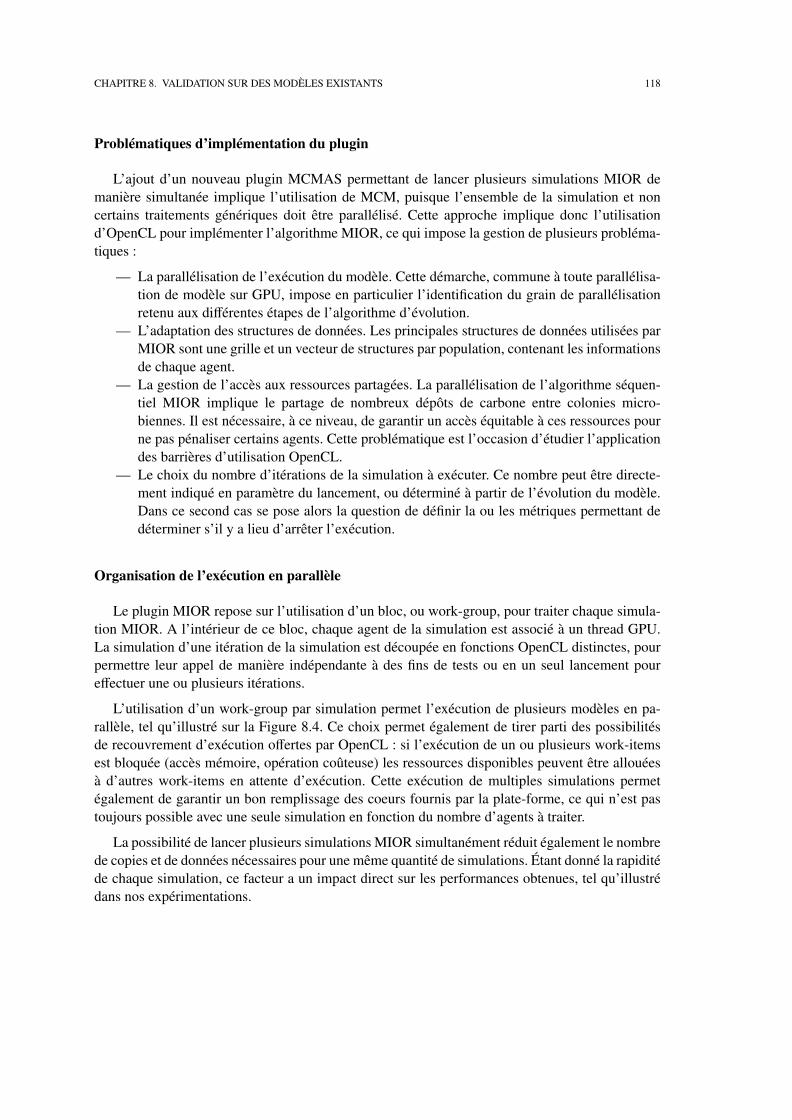
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 118
Problématiques d’implémentation du plugin
L’ajout d’un nouveau plugin MCMAS permettant de lancer plusieurs simulations MIOR demanière simultanée implique l’utilisation de MCM, puisque l’ensemble de la simulation et noncertains traitements génériques doit être parallélisé. Cette approche implique donc l’utilisationd’OpenCL pour implémenter l’algorithme MIOR, ce qui impose la gestion de plusieurs probléma-tiques :
— La parallélisation de l’exécution du modèle. Cette démarche, commune à toute parallélisa-tion de modèle sur GPU, impose en particulier l’identification du grain de parallélisationretenu aux différentes étapes de l’algorithme d’évolution.
— L’adaptation des structures de données. Les principales structures de données utilisées parMIOR sont une grille et un vecteur de structures par population, contenant les informationsde chaque agent.
— La gestion de l’accès aux ressources partagées. La parallélisation de l’algorithme séquen-tiel MIOR implique le partage de nombreux dépôts de carbone entre colonies micro-biennes. Il est nécessaire, à ce niveau, de garantir un accès équitable à ces ressources pourne pas pénaliser certains agents. Cette problématique est l’occasion d’étudier l’applicationdes barrières d’utilisation OpenCL.
— Le choix du nombre d’itérations de la simulation à exécuter. Ce nombre peut être directe-ment indiqué en paramètre du lancement, ou déterminé à partir de l’évolution du modèle.Dans ce second cas se pose alors la question de définir la ou les métriques permettant dedéterminer s’il y a lieu d’arrêter l’exécution.
Organisation de l’exécution en parallèle
Le plugin MIOR repose sur l’utilisation d’un bloc, ou work-group, pour traiter chaque simula-tion MIOR. A l’intérieur de ce bloc, chaque agent de la simulation est associé à un thread GPU.La simulation d’une itération de la simulation est découpée en fonctions OpenCL distinctes, pourpermettre leur appel de manière indépendante à des fins de tests ou en un seul lancement poureffectuer une ou plusieurs itérations.
L’utilisation d’un work-group par simulation permet l’exécution de plusieurs modèles en pa-rallèle, tel qu’illustré sur la Figure 8.4. Ce choix permet également de tirer parti des possibilitésde recouvrement d’exécution offertes par OpenCL : si l’exécution de un ou plusieurs work-itemsest bloquée (accès mémoire, opération coûteuse) les ressources disponibles peuvent être allouéesà d’autres work-items en attente d’exécution. Cette exécution de multiples simulations permetégalement de garantir un bon remplissage des coeurs fournis par la plate-forme, ce qui n’est pastoujours possible avec une seule simulation en fonction du nombre d’agents à traiter.
La possibilité de lancer plusieurs simulations MIOR simultanément réduit également le nombrede copies et de données nécessaires pour une même quantité de simulations. Étant donné la rapiditéde chaque simulation, ce facteur a un impact direct sur les performances obtenues, tel qu’illustrédans nos expérimentations.
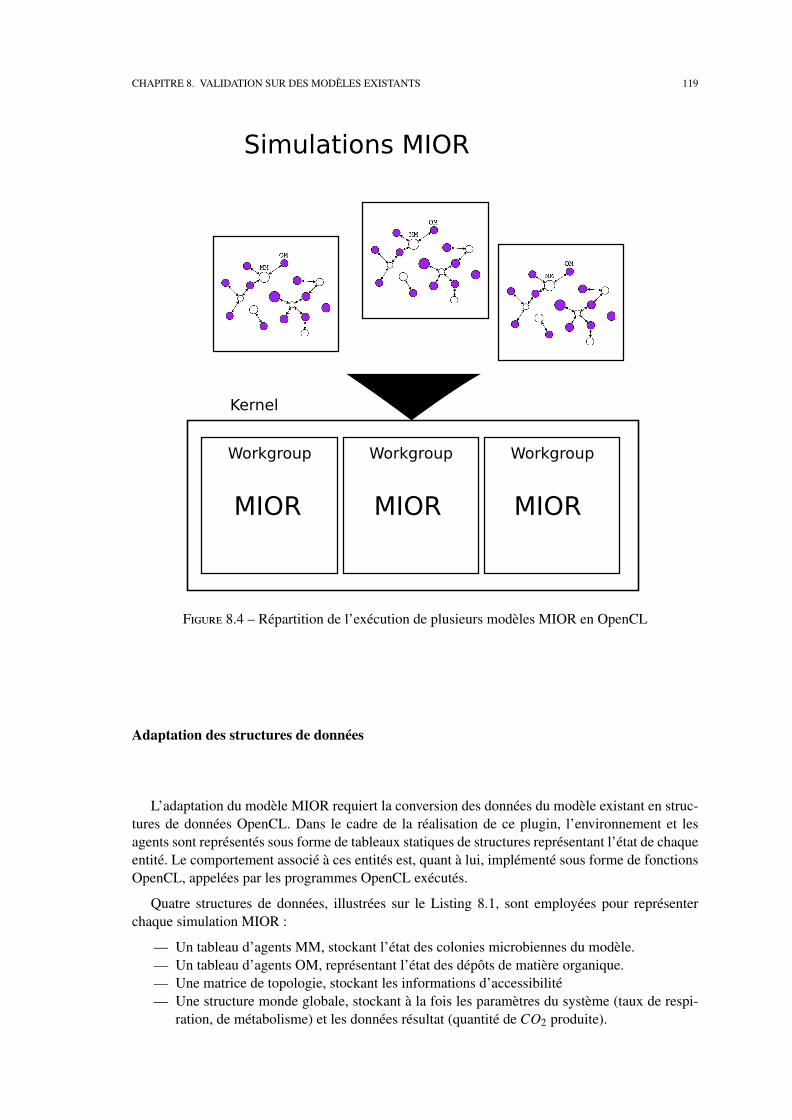
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 119
MIOR MIOR MIOR
Workgroup
Kernel
Workgroup Workgroup
Simulations MIOR
Figure 8.4 – Répartition de l’exécution de plusieurs modèles MIOR en OpenCL
Adaptation des structures de données
L’adaptation du modèle MIOR requiert la conversion des données du modèle existant en struc-tures de données OpenCL. Dans le cadre de la réalisation de ce plugin, l’environnement et lesagents sont représentés sous forme de tableaux statiques de structures représentant l’état de chaqueentité. Le comportement associé à ces entités est, quant à lui, implémenté sous forme de fonctionsOpenCL, appelées par les programmes OpenCL exécutés.
Quatre structures de données, illustrées sur le Listing 8.1, sont employées pour représenterchaque simulation MIOR :
— Un tableau d’agents MM, stockant l’état des colonies microbiennes du modèle.— Un tableau d’agents OM, représentant l’état des dépôts de matière organique.— Une matrice de topologie, stockant les informations d’accessibilité— Une structure monde globale, stockant à la fois les paramètres du système (taux de respi-
ration, de métabolisme) et les données résultat (quantité de CO2 produite).
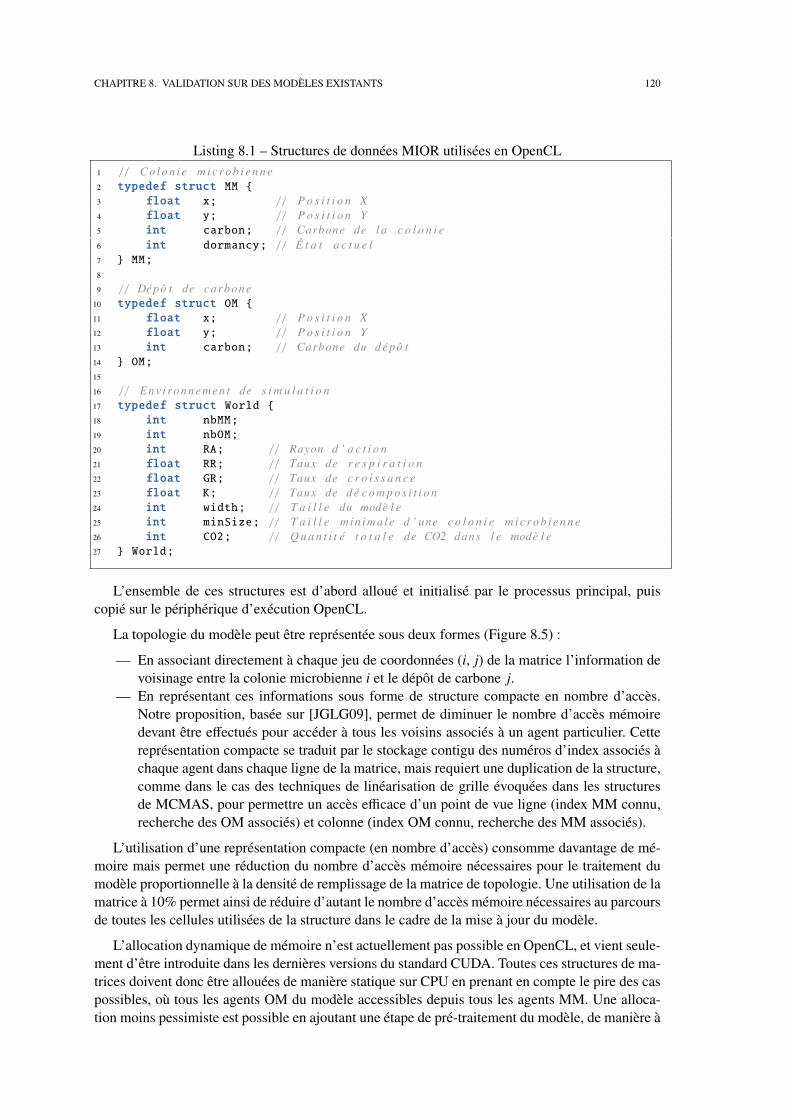
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 120
Listing 8.1 – Structures de données MIOR utilisées en OpenCL1 / / C o l o n i e m i c r o b i e n n e2 typedef struct MM {
3 float x; / / P o s i t i o n X4 float y; / / P o s i t i o n Y5 int carbon; / / Carbone de l a c o l o n i e6 int dormancy; / / É t a t a c t u e l7 } MM;
8
9 / / Dé pô t de carbone10 typedef struct OM {
11 float x; / / P o s i t i o n X12 float y; / / P o s i t i o n Y13 int carbon; / / Carbone du d é pô t14 } OM;
15
16 / / Env i ronnemen t de s i m u l a t i o n17 typedef struct World {
18 int nbMM;
19 int nbOM;
20 int RA; / / Rayon d ’ a c t i o n21 float RR; / / Taux de r e s p i r a t i o n22 float GR; / / Taux de c r o i s s a n c e23 float K; / / Taux de d é c o m p o s i t i o n24 int width; / / T a i l l e du modè l e25 int minSize; / / T a i l l e min imale d ’ une c o l o n i e m i c r o b i e n n e26 int CO2; / / Q u a n t i t é t o t a l e de CO2 dans l e modè l e27 } World;
L’ensemble de ces structures est d’abord alloué et initialisé par le processus principal, puiscopié sur le périphérique d’exécution OpenCL.
La topologie du modèle peut être représentée sous deux formes (Figure 8.5) :
— En associant directement à chaque jeu de coordonnées (i, j) de la matrice l’information devoisinage entre la colonie microbienne i et le dépôt de carbone j.
— En représentant ces informations sous forme de structure compacte en nombre d’accès.Notre proposition, basée sur [JGLG09], permet de diminuer le nombre d’accès mémoiredevant être effectués pour accéder à tous les voisins associés à un agent particulier. Cettereprésentation compacte se traduit par le stockage contigu des numéros d’index associés àchaque agent dans chaque ligne de la matrice, mais requiert une duplication de la structure,comme dans le cas des techniques de linéarisation de grille évoquées dans les structuresde MCMAS, pour permettre un accès efficace d’un point de vue ligne (index MM connu,recherche des OM associés) et colonne (index OM connu, recherche des MM associés).
L’utilisation d’une représentation compacte (en nombre d’accès) consomme davantage de mé-moire mais permet une réduction du nombre d’accès mémoire nécessaires pour le traitement dumodèle proportionnelle à la densité de remplissage de la matrice de topologie. Une utilisation de lamatrice à 10% permet ainsi de réduire d’autant le nombre d’accès mémoire nécessaires au parcoursde toutes les cellules utilisées de la structure dans le cadre de la mise à jour du modèle.
L’allocation dynamique de mémoire n’est actuellement pas possible en OpenCL, et vient seule-ment d’être introduite dans les dernières versions du standard CUDA. Toutes ces structures de ma-trices doivent donc être allouées de manière statique sur CPU en prenant en compte le pire des caspossibles, où tous les agents OM du modèle accessibles depuis tous les agents MM. Une alloca-tion moins pessimiste est possible en ajoutant une étape de pré-traitement du modèle, de manière à
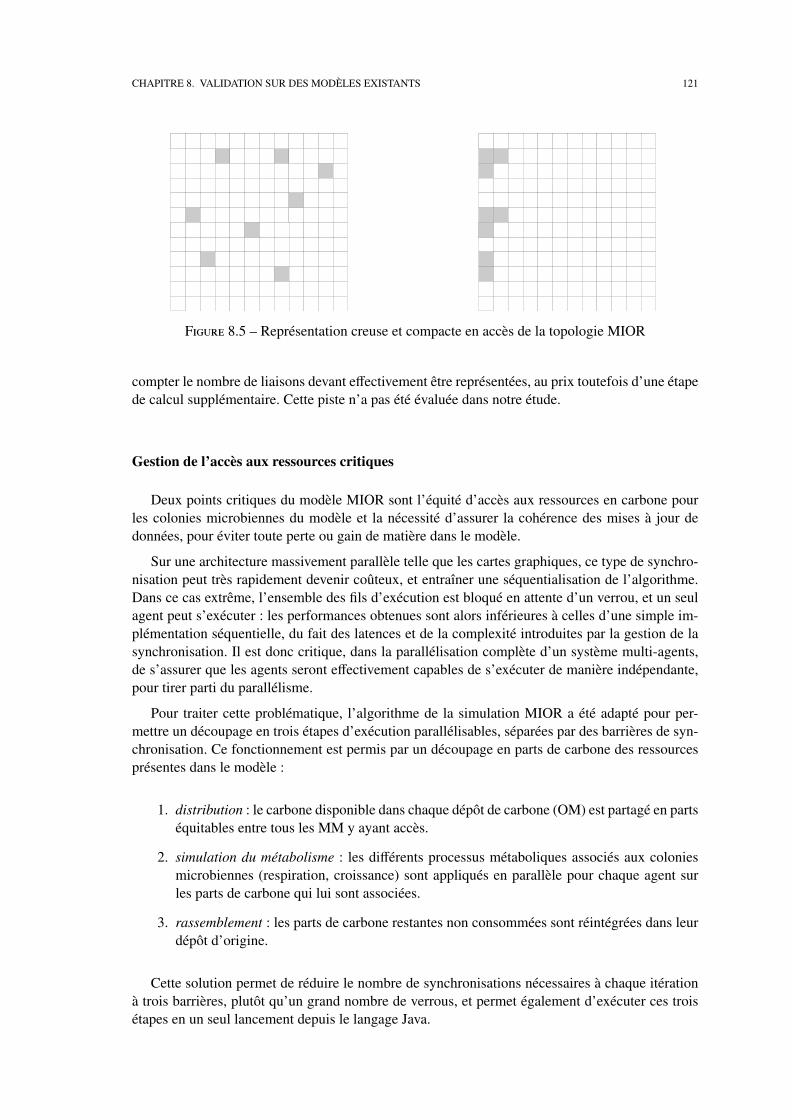
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 121
Figure 8.5 – Représentation creuse et compacte en accès de la topologie MIOR
compter le nombre de liaisons devant effectivement être représentées, au prix toutefois d’une étapede calcul supplémentaire. Cette piste n’a pas été évaluée dans notre étude.
Gestion de l’accès aux ressources critiques
Deux points critiques du modèle MIOR sont l’équité d’accès aux ressources en carbone pourles colonies microbiennes du modèle et la nécessité d’assurer la cohérence des mises à jour dedonnées, pour éviter toute perte ou gain de matière dans le modèle.
Sur une architecture massivement parallèle telle que les cartes graphiques, ce type de synchro-nisation peut très rapidement devenir coûteux, et entraîner une séquentialisation de l’algorithme.Dans ce cas extrême, l’ensemble des fils d’exécution est bloqué en attente d’un verrou, et un seulagent peut s’exécuter : les performances obtenues sont alors inférieures à celles d’une simple im-plémentation séquentielle, du fait des latences et de la complexité introduites par la gestion de lasynchronisation. Il est donc critique, dans la parallélisation complète d’un système multi-agents,de s’assurer que les agents seront effectivement capables de s’exécuter de manière indépendante,pour tirer parti du parallélisme.
Pour traiter cette problématique, l’algorithme de la simulation MIOR a été adapté pour per-mettre un découpage en trois étapes d’exécution parallélisables, séparées par des barrières de syn-chronisation. Ce fonctionnement est permis par un découpage en parts de carbone des ressourcesprésentes dans le modèle :
1. distribution : le carbone disponible dans chaque dépôt de carbone (OM) est partagé en partséquitables entre tous les MM y ayant accès.
2. simulation du métabolisme : les différents processus métaboliques associés aux coloniesmicrobiennes (respiration, croissance) sont appliqués en parallèle pour chaque agent surles parts de carbone qui lui sont associées.
3. rassemblement : les parts de carbone restantes non consommées sont réintégrées dans leurdépôt d’origine.
Cette solution permet de réduire le nombre de synchronisations nécessaires à chaque itérationà trois barrières, plutôt qu’un grand nombre de verrous, et permet également d’exécuter ces troisétapes en un seul lancement depuis le langage Java.
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 122
Détection de la terminaison
Si le modèle MIOR s’intéresse à l’évolution microscopique d’un système, il est tout à faitpossible de le coupler avec des modèles s’appliquant à d’autres échelles de taille, notammentmacroscopiques, pour obtenir une simulation plus exhaustive du problème : on parle alors desimulation multi-échelles.
Sworm [BMD+09] est un exemple de système multi-agents agent pouvant compléter l’évolu-tion à l’échelle microscopique décrite par MIOR. Ce modèle permet de représenter l’effet de lamacrofaune (par exemple les vers de terre) et de la microfaune (les bactéries) sur l’évolution desquantités de matière organique dans le sol. L’implémentation de Sworm est développée en Java surla plate-forme Madkit [GF00a]. Elle se focalise sur l’effet bioturbant (déplacement des matièresminérales et organiques) causé par les vers de terre dans le sol. Cette version ne prenant pas encompte l’activité microbienne, l’objectif du modèle MIOR est de simuler cette activité à l’échelled’un cube de sol de 0.002 mm, là où le modèle Sworm s’intéresse à des échelles de sols de 20 cm.
La représentation des données sous la forme d’unités de sol est liée à cette intégration : pourne pas imposer l’instantiation de l’ensemble des cellules du volume de sol représenté, Sworm sebase sur une représentation des données de type fractale (Figure 8.2). Cette organisation permetl’allocation et le raffinement de la représentation de chaque cellule de sol à la demande. Elle esttotalement transparente du point de vue de la représentation des données du modèle MIOR, qui nemanipule que des cellules de la plus petite échelle de représentation. Elle possède cependant sonimportance en termes de scénarios d’exécution devant être envisagés pour ce modèle. L’instan-tiation de nouvelles unités macroscopiques de sol implique en effet le lancement de nombreusessimulations MIOR, qui peuvent être déléguées par lot sur GPU.
Cette utilisation dans le cadre d’un autre modèle pose cependant le problème de pouvoir contrô-ler le temps d’exécution, et donc la quantité de traitements effectués par ces simulations MIOR. Ilest possible de définir deux critères de terminaison pour assurer ce contrôle :
— Stabilisation de l’évolution du modèle sur N itérations— Exécution d’un nombre fixé d’itérations
Ces deux critères répondent à des optiques différentes, avec toutefois systématiquement la vo-lonté de pouvoir suivre l’historique de l’évolution des principales données du modèle (quantité decarbone, de CO2).
Stabilisation de l’évolution du modèle sur N itérations
Ce critère de terminaison correspond à une absence d’évolution d’un ensemble de métriquespendant un nombre fixé d’itérations. Cet ensemble peut comprendre un nombre variables de mé-triques, suivant le niveau d’évolution à surveiller : une simple surveillance de la quantité globalede carbone stockée par les colonies microbiennes permet par exemple de déceler tout arrêt de fixa-tion du carbone sur cette période de temps. Cet état ne garantit pas cependant l’arrêt de l’évolu-tion du modèle, mais simplement l’absence de ressources en carbone suffisantes pour déclencherla moindre croissance microbienne. La poursuite du processus de respiration n’est pas prise encompte. La surveillance des quantités de dioxyde de carbone (CO2) pallie à ce défaut, du fait desa production lors du processus de respiration. Une surveillance de ces deux quantités n’est ce-pendant pas nécessaire pour garantir l’arrêt des deux processus d’évolution dans le modèle : larespiration prenant le pas sur toute croissance dans l’algorithme, la cessation de ce processus suffità garantir l’arrêt du second.
L’utilisation de N itérations de surveillance est rendue nécessaire par l’obligation de prendre
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 123
en compte l’éventuel décès d’une ou plusieurs colonies bactériennes, une fois ce type d’équilibreatteint. Ces décès, en diminuant la concurrence d’accès aux dépôts de carbone, augmentent laquantité de carbone utilisable par les autres colonies microbiennes en partageant l’accès. Cetteaugmentation est susceptible de permettre à ces colonies de sortir de leur état de dormance et derelancer une nouvelle phase d’évolution du système.
L’inconvénient de ce critère d’arrêt est la difficulté d’estimer à priori le nombre d’itérations né-cessaires à la stabilisation du système. L’exécution sur GPU ne pouvant pas être interrompue par leprogramme, il est difficile, même avec une connaissance précise des paramètres de la simulation,de par la nature aléatoire du positionnement des agents, et donc leur accès aux ressources, et de cer-tains processus, de calculer une échéance de temps fiable avant obtention du type de stabilisationde l’évolution recherchée.
Exécution d’un nombre fixé d’itérations
Ce critère de terminaison est totalement agnostique vis-à-vis de l’état du modèle, et considèrele seul nombre d’itérations de la simulation écoulé comme indicateur d’arrêt. Cette limite permet,en connaissant la durée moyenne d’une itération, d’estimer le temps total nécessaire pour effectuerle calcul demandé. En variant le nombre d’itérations exécutées pour chaque lancement GPU, cetteinformation permet le contrôle de la latence maximale entre deux retours de résultats.
L’estimation de la durée d’une itération est possible, en dépit de la nature stochastique de cer-taines portions de l’algorithme (positions, probabilité de décès) en considérant le cas le plus coû-teux possible en complexité d’exécution. Dans le cas de MIOR, les seules boucles de l’algorithmesont associées à des parcours de relations inter-agents. Ce coût revient à calculer le nombre maxi-mal de relations pouvant être présentes dans le modèle. Ce nombre est atteint si chaque coloniemicrobienne a un rayon d’interaction égal ou supérieur à la dimension la plus grande du modèle.Tous les dépôts de carbone présents dans le modèle sont alors accessibles à chaque colonie mi-crobienne, ce qui se traduit, pour n colonies microbiennes et m dépôts de carbone, par un total den ∗ m relations possibles.
Les deux approches de terminaison sont rendues possibles par le plugin MIOR fourni avec MC-MAS, de manière à permettre le choix de l’une ou l’autre des approches par le modèle Sworm, enfonction du nombre de simulations à lancer et des impératifs en temps du modèle macroscopique.
8.1.3 Un modèle macroscopique : Collemboles
Après avoir présenté la parallélisation du modèle MIOR, nous nous intéressons à présent à unautre système multi-agents, macroscopique cette fois, Collemboles. Ce modèle nous permet demettre en avant un exemple de parallélisation complète de modèle sur GPU au moyen de plusieurskernels d’exécution lancés de manière asynchrone.
Présentation du modèle
Le modèle Collemboles est un système multi-agents conçu pour modéliser la diffusion d’arthro-podes, des collemboles, entre des parcelles de plusieurs types naturelles, forestières ou artificielles,en vue d’étudier leur impact sur la biodiversité. Il est basé sur le chargement de données depuis unsystème d’information géographique pour obtenir un espace en deux dimensions découpé en par-celles de terrain de forme polygonale, tel qu’illustré par la Figure 8.6. Cet environnement continu
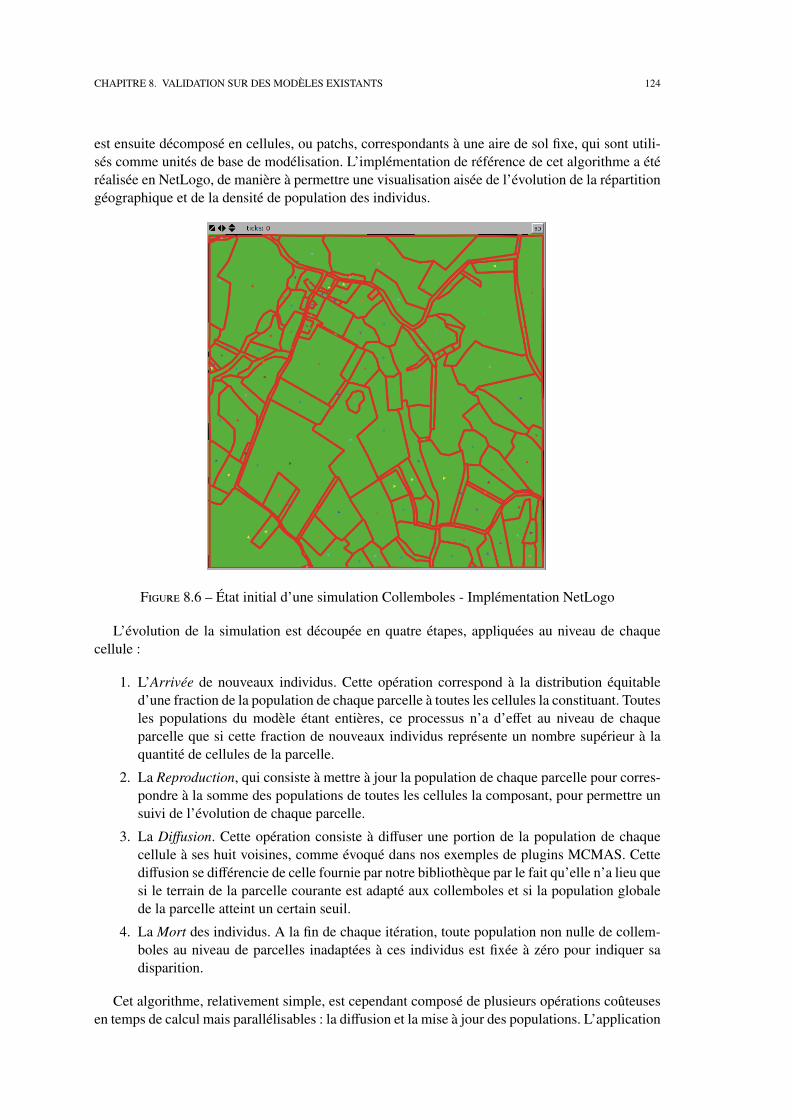
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 124
est ensuite décomposé en cellules, ou patchs, correspondants à une aire de sol fixe, qui sont utili-sés comme unités de base de modélisation. L’implémentation de référence de cet algorithme a étéréalisée en NetLogo, de manière à permettre une visualisation aisée de l’évolution de la répartitiongéographique et de la densité de population des individus.
Figure 8.6 – État initial d’une simulation Collemboles - Implémentation NetLogo
L’évolution de la simulation est découpée en quatre étapes, appliquées au niveau de chaquecellule :
1. L’Arrivée de nouveaux individus. Cette opération correspond à la distribution équitabled’une fraction de la population de chaque parcelle à toutes les cellules la constituant. Toutesles populations du modèle étant entières, ce processus n’a d’effet au niveau de chaqueparcelle que si cette fraction de nouveaux individus représente un nombre supérieur à laquantité de cellules de la parcelle.
2. La Reproduction, qui consiste à mettre à jour la population de chaque parcelle pour corres-pondre à la somme des populations de toutes les cellules la composant, pour permettre unsuivi de l’évolution de chaque parcelle.
3. La Diffusion. Cette opération consiste à diffuser une portion de la population de chaquecellule à ses huit voisines, comme évoqué dans nos exemples de plugins MCMAS. Cettediffusion se différencie de celle fournie par notre bibliothèque par le fait qu’elle n’a lieu quesi le terrain de la parcelle courante est adapté aux collemboles et si la population globalede la parcelle atteint un certain seuil.
4. La Mort des individus. A la fin de chaque itération, toute population non nulle de collem-boles au niveau de parcelles inadaptées à ces individus est fixée à zéro pour indiquer sadisparition.
Cet algorithme, relativement simple, est cependant composé de plusieurs opérations coûteusesen temps de calcul mais parallélisables : la diffusion et la mise à jour des populations. L’application
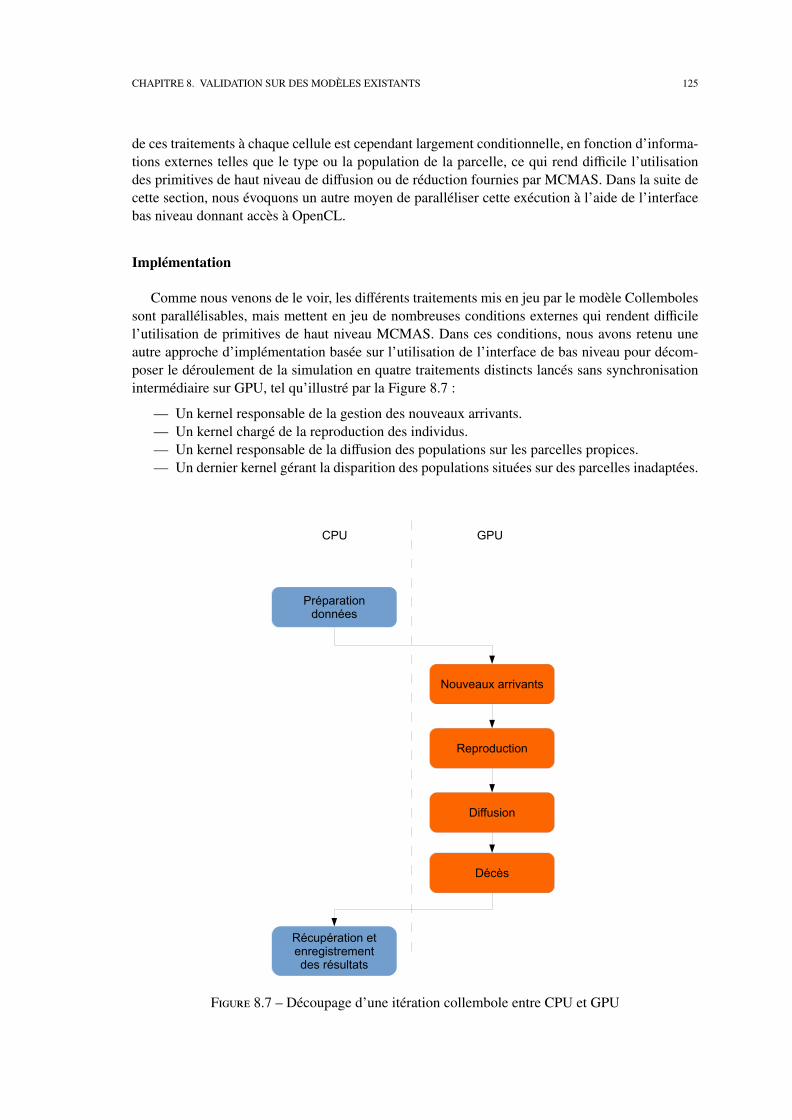
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 125
de ces traitements à chaque cellule est cependant largement conditionnelle, en fonction d’informa-tions externes telles que le type ou la population de la parcelle, ce qui rend difficile l’utilisationdes primitives de haut niveau de diffusion ou de réduction fournies par MCMAS. Dans la suite decette section, nous évoquons un autre moyen de paralléliser cette exécution à l’aide de l’interfacebas niveau donnant accès à OpenCL.
Implémentation
Comme nous venons de le voir, les différents traitements mis en jeu par le modèle Collembolessont parallélisables, mais mettent en jeu de nombreuses conditions externes qui rendent difficilel’utilisation de primitives de haut niveau MCMAS. Dans ces conditions, nous avons retenu uneautre approche d’implémentation basée sur l’utilisation de l’interface de bas niveau pour décom-poser le déroulement de la simulation en quatre traitements distincts lancés sans synchronisationintermédiaire sur GPU, tel qu’illustré par la Figure 8.7 :
— Un kernel responsable de la gestion des nouveaux arrivants.— Un kernel chargé de la reproduction des individus.— Un kernel responsable de la diffusion des populations sur les parcelles propices.— Un dernier kernel gérant la disparition des populations situées sur des parcelles inadaptées.
Nouveaux arrivants
Préparationdonnées
Récupération etenregistrementdes résultats
CPU GPU
Reproduction
Diffusion
Décès
Figure 8.7 – Découpage d’une itération collembole entre CPU et GPU
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 126
Structures de données
Deux structures principales sont mises en jeu dans le modèle Collemboles :
— Les parcelles, associées à une surface, une population et un type de terrain.— La grille représentant l’environnement de simulation, dont chaque cellule comprend une
indication de parcelle et une population.
La représentation des parcelles en OpenCL peut être effectuée, comme nous l’avons vu dansnotre réflexion sur les structures de données agents, sous forme de tableaux de structures ou d’untableau pour chaque propriété.
Nous avons choisi, dans le cas du modèle Collembole, d’avoir recours à un tableau par propriétépour représenter les parcelles pour plusieurs raisons :
— Le faible nombre de propriétés associées à chaque parcelle limite l’explosion du nombrede paramètres sur GPU.
— Seules une ou deux de ces propriétés sont utilisées à chaque étape des traitements. Ledécoupage des propriétés en structures distinctes permet donc de récupérer certaines in-formations du modèle en cours d’exécution à des fins de vérification ou de stockage sansperturber l’exécution des traitements n’y ayant pas recours.
— Les traitements des cellules étant toujours basés sur les mêmes propriétés dans un mêmetraitement, ce découpage maximise la localité de ces propriétés en mémoire, à la fois pouroptimiser les accès et l’occupation des éventuels caches L1 et L2 présents sur le matériel.
Ce raisonnement s’applique également à l’environnement, pour lequel l’utilisation d’une grillepar propriété, assez similaire à celle de l’implémentation proie-prédateur, a été retenue. Dans lecas de la grille d’environnement, ce découpage en grilles de propriétés offre un avantage supplé-mentaire, en permettant de limiter au strict minimum les données devant être présentes en mémoireGPU à un moment donné.
Nouveaux arrivants
L’arrivée de nouveaux arrivants est traitée au niveau de chaque cellule. Pour cela, chaque ins-tance du kernel récupère la population et le nombre de cellules de la parcelle associée à la cellulecourante, pour déterminer le nombre d’individus devant être répartis sur chaque unité de sol. Cetteopération revient à calculer de nombreuses fois la même fraction de population à répartir, maispermet à chaque thread de ne mettre à jour que sa cellule locale, ce qui élimine tout problème desynchronisation de l’écriture des données.
Reproduction
Ce traitement est également effectué pour chaque cellule de l’environnement. La réduction dela population au niveau de la parcelle est effectuée sous forme d’addition atomique, pour garantirla cohérence des totaux obtenus.
Le choix d’un traitement basé sur les parcelles, plutôt que les cellules, éviterait l’utilisationd’opérations atomiques, mais impose de disposer d’une liste des cellules associées à chaque par-celle pour ne pas avoir à parcourir l’ensemble de la grille, structure qui n’est pas présente dansnotre modèle.
Le code final obtenu est très proche d’une opération de diffusion MCMAS, si ce n’est que lesrésultats sont réduits en plusieurs sous-totaux sur la base de parcelles plutôt que sous la formed’une unique valeur scalaire.
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 127
Diffusion
La réalisation de la diffusion sur GPU des populations du modèle est effectuée en deux étapes,séparées par une barrière d’exécution.
— Une quantité d’individus à diffuser est calculée au niveau de chaque cellule.— Chaque cellule récupère un huitième de la quantité de chaque cellule voisine et l’ajoute à
sa propre population.
L’application des mises à jour sur la cellule associée à chaque thread, plutôt que d’effectuerdirectement les mises à jour sur les cellules voisines, permet comme dans le cas de l’arrivée denouveaux individus de garantir l’absence d’écriture de la même donnée par plusieurs threads dif-férents, et ainsi d’éviter la synchronisation des modifications associées dans le modèle.
Mort des individus
Le dernier traitement exécuté sur GPU pour chaque cellule est la mise à zéro de la populationde chaque cellule inadaptée du fait du type de terrain aux individus collemboles. Cette dernièreopération ne requiert pas de considération particulière en termes de synchronisation de l’exécution,la seule donnée utilisée en écriture est la cellule courante. Elle peut donc être directement réaliséesans adaptation particulière en OpenCL.
8.2 Etudes de performances
8.2.1 Supports d’exécution
Dans le cadre de nos études de performances, nous avons eu recours à une variété de supportsd’exécution, tant grand public que orientés vers le calcul haute performance. Dans cette section,nous présentons les caractéristiques de chacun de ces matériels, pour les replacer dans le contextede l’évolution de l’exécution sur GPU.
L’objectif de cette variété de supports est de permettre la comparaison entre gammes profes-sionnelles et grand public d’une part, entre anciennes et nouvelles générations d’autre part, dedifférentes solutions matérielles d’exécution. De cette manière, il est possible de quantifier, pourun chercheur, le bénéfice pouvant être obtenu par l’utilisation de matériel spécialisé par rapport àcelle de son poste personnel. Cette variété permet également de valider les performances obtenuesde manière indépendante par rapport à une génération de matériel ou une implémentation OpenCLdonnée.
Il est important de noter que le nombre de coeurs n’est pas directement comparable entre maté-riel NVIDIA et AMD, les unités d’exécution proposées par ce second fabriquant étant plus nom-breuses mais également plus spécialisées.
Voici la liste de ces supports, classés par ordre chronologique.
NVIDIA Geforce 8800GT
Le premier matériel sur lequel nous avons eu l’occasion de réaliser des essais est une cartegraphique milieu de gamme grand public de NVIDIA, la Geforce 8800GT, sortie en octobre 2007.Cette carte dispose de 112 unités d’exécution, soit 14 multi-processeurs, cadencés à 1.5 GHz etaccompagnés de 512 Mo de mémoire vive, et offre une puissance théorique de 504 Gflops en
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 128
simple précision. Elle ne supporte pas matériellement la gestion des nombres en double précision.Dans nos expérimentations, elle est associée à un processeur Intel Core 2 Q9300 fonctionnant à2.5 GHz. Elle ne propose pas de mécanisme de cache L1 et L2.
NVIDIA Tesla S1070
Le second matériel utilisé est un châssis graphique dédié au calcul GPU proposé par NVIDIAen 2009. Il est constitué de quatre cartes graphiques Tesla C1060 dotées de 240 unités d’exécution,soit 30 multiprocesseurs cadencés à 1.3 Ghz pour une puissance théorique de 933 Gflops par carte.Chaque carte est associée à 4 Go de mémoire vive. Dans le cadre de nos tests, un seul de cesGPU est utilisé, couplé à un processeur Intel Xeon X5550 cadencé à 2.67 Ghz. L’architecturematérielle de cette solution est très similaire à la Geforce 8800GT présentée précédemment. Ellese différencie par la quantité de mémoire disponible, 4 Go, ainsi que le support de la correctiondes erreurs mémoires (ECC) et des calculs en nombres flottants double précision. Elle ne proposepas de mécanisme de cache L1 et L2.
AMD Radeon HD6870
La carte graphique AMD Radeon HD6870 est une carte graphique grand public de milieu degamme sortie en octobre 2010. Elle se caractérise par l’utilisation d’un mécanisme de cache L1et L2 similaire à celui rencontré sur les cartes NVIDIA récentes, mais ne supporte pas toutefoisle traitement matériel de nombres flottants en double précision. Elle est constituée, au niveau dumatériel, de 1120 coeurs cadencés à une fréquence de 900 MHz, pour une puissance théoriquede 2016 Gflops. Ces unités d’exécution sont associées à 1Go de mémoire vive intégrés à la carte.Dans nos expérimentations, elle est associée à un processeur AMD Phenom II X6 1090T cadencéà 3.2 GHz.
NVIDIA Geforce 560Ti
La Geforce 560Ti est une carte graphique grand public de milieu de gamme sortie en janvier2011. Elle est basée sur l’architecture Fermi. Cette carte propose 384 unités d’exécution cadencéesà 822 MHz et 1 Go de mémoire vive. Elle dispose d’un mécanisme de cache L1 et L2 et supporteles calculs en double précision, mais limite le débit d’opérations obtenu à un douzième de celui destraitements en simple précision. Dans notre configuration de test, elle est associée à un processeurIntel Core i7 2600K cadencé à 3.4 GHz.
NVIDIA Tesla K20
La carte graphique Tesla K20 est basée sur l’architecture matérielle Kepler et propose doncun cache L1 et un cache L2. Sortie fin novembre 2012, elle est destinée spécifiquement au cal-cul scientifique, et supporte matériellement le traitement de nombres flottants en double précisionainsi que la correction des erreurs mémoires. Elle est constituée au niveau matériel de 2496 coeursgraphiques cadencés à 706 MHz, pour une puissance théorique de 3520 Gflops. Ces coeurs d’exé-cution sont associés à 5120 Mo de mémoire vive. Les performances en double précision offertespar cette carte sont de l’ordre du tiers des performances obtenues en simple précision. Cette carteest associée dans nos expérimentations à un processeur Intel Xeon CPU E5-2609v2 cadencé à2.50 GHz.
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 129
8.2.2 Protocole expérimental
L’évolution du matériel GPU est très rapide. Nous avons donc eu l’occasion, entre le début etla fin de nos recherches, de tester des supports très différents. Certains d’entre eux, comme la carteGeforce 8800GT, n’ont pas pu être utilisés pour l’ensemble de nos tests. Nous avons cependantinclus les courbes correspondantes pour permettre une comparaison avec nos autres plates-formesd’exécution.
Tous les tests ont été lancés sur des systèmes d’exploitation Linux 64 bits. Les courbes de la Ge-force 8800GT ont été réalisées avec la version 3.2 de l’environnement CUDA fourni par la sociétéNVIDIA. Toutes les autres courbes mettant en jeu du matériel de ce fabriquant ont été réaliséesavec la dernière version stable, la version 5.2. Pour les tests de performance sur matériel AMD ouCPU, nous avons utilisé l’implémentation OpenCL proposée par l’environnement AMD APP enversion 2.7.
Dans le cadre de nos expérimentations, nous avons choisi d’évaluer le temps d’exécution enfonction de la quantité de traitements. Nous avons pour cela fait varier la taille et le nombred’agents du modèle dans le cas des modèles MIOR et Collemboles. Dans le cas de proie-prédateur,cette variation de la quantité des traitements est obtenue en modifiant le rayon de recherche dechaque individu.
Toutes les valeurs indiquées sont basées sur une moyenne des temps d’exécution obtenus surplusieurs dizaines d’exécution, de manière à minimiser l’impact du système d’exploitation et dupilote graphique sur les temps observés.
8.2.3 Résultats obtenus
Proie-prédateur
Pour mesurer l’impact de l’utilisation du GPU sur les performances obtenues, nous avons choiside faire varier le rayon de recherche de nouvelles positions sur GPU, en maintenant toutes lesautres données constantes. De cette manière, il est possible de mesurer l’impact du nombre decases parcourues et du nombre d’accès mémoires sur les performances obtenues. Le rayon derecherche est directement appliqué aux proies, et majoré de 50% pour les prédateurs, de manièreà conserver un rapport fixe entre les champs de vision de chaque population. Nous avons utilisépour nos expérimentation un environnement de dimension 1000, capable de tenir en mémoiresur tous nos supports d’évolution. Pour éviter de donner l’accès à l’ensemble de l’environnementà chaque individu, nous nous sommes arrêtés à un rayon de recherche de 100, correspondant à1% de l’espace total simulé. Chaque courbe compare les performances obtenues entre la cartegraphique et le CPU présent sur le même support d’exécution, ce qui explique l’allure différentede chaque courbe CPU.
Le temps moyen d’une itération est pris pour référence pour mesurer l’impact de ce rayon derecherche sur les performances du modèle. Ce temps est à chaque fois comparé entre l’implé-mentation basée sur MCMAS, et une implémentation reprenant exactement le même algorithmemais utilisant des équivalents réalisés en Java de ces opérations génériques, de manière à dispo-ser de deux décompositions du programme équivalentes. La moyenne en temps d’exécution d’uneitération sur cinquante itérations de la simulation est retenue comme référence.
La Figure 8.8 illustre les temps obtenus sur carte Kepler et sur le processeur Xeon correspon-dant. Tant que le rayon de recherche configuré pour les individus proies demeure inférieur à 30,l’implémentation GPU présente des performances très similaires à la version CPU. Cette proximité
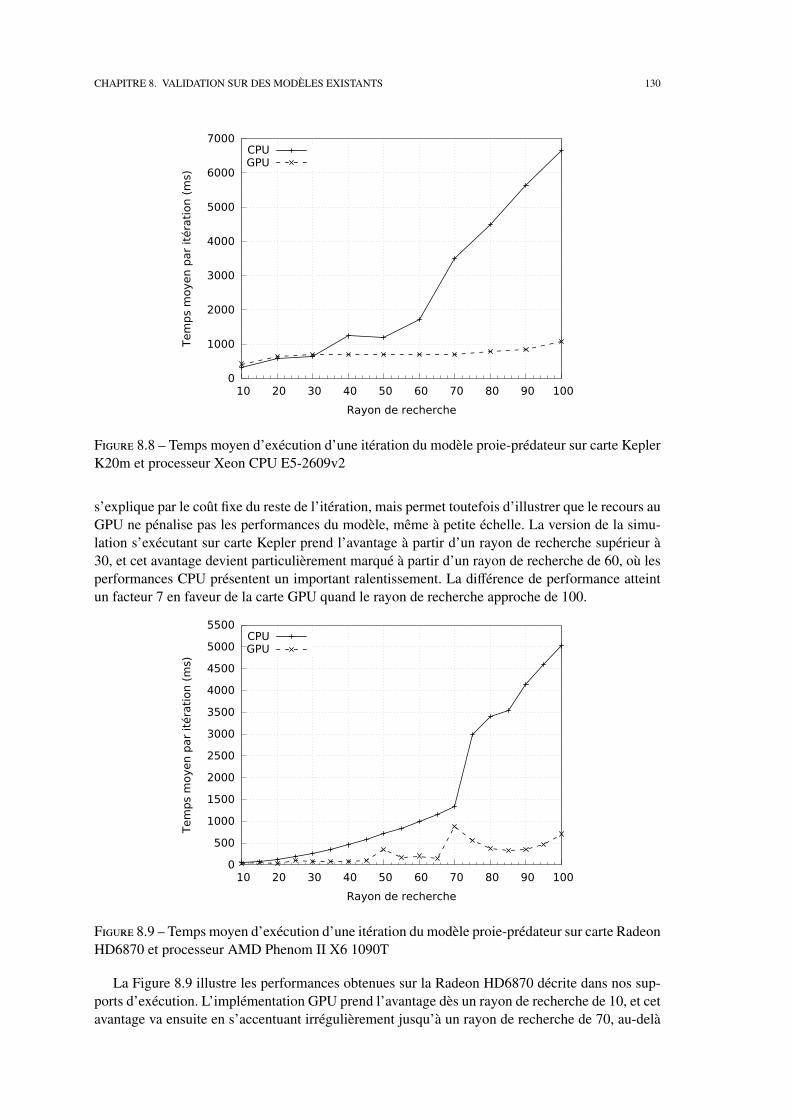
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 130
0
1000
2000
3000
4000
5000
6000
7000
10 20 30 40 50 60 70 80 90 100
Tem
ps m
oyen p
ar
itéra
tion (
ms)
Rayon de recherche
CPUGPU
Figure 8.8 – Temps moyen d’exécution d’une itération du modèle proie-prédateur sur carte KeplerK20m et processeur Xeon CPU E5-2609v2
s’explique par le coût fixe du reste de l’itération, mais permet toutefois d’illustrer que le recours auGPU ne pénalise pas les performances du modèle, même à petite échelle. La version de la simu-lation s’exécutant sur carte Kepler prend l’avantage à partir d’un rayon de recherche supérieur à30, et cet avantage devient particulièrement marqué à partir d’un rayon de recherche de 60, où lesperformances CPU présentent un important ralentissement. La différence de performance atteintun facteur 7 en faveur de la carte GPU quand le rayon de recherche approche de 100.
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
5500
10 20 30 40 50 60 70 80 90 100
Tem
ps m
oyen p
ar
itéra
tion (
ms)
Rayon de recherche
CPUGPU
Figure 8.9 – Temps moyen d’exécution d’une itération du modèle proie-prédateur sur carte RadeonHD6870 et processeur AMD Phenom II X6 1090T
La Figure 8.9 illustre les performances obtenues sur la Radeon HD6870 décrite dans nos sup-ports d’exécution. L’implémentation GPU prend l’avantage dès un rayon de recherche de 10, et cetavantage va ensuite en s’accentuant irrégulièrement jusqu’à un rayon de recherche de 70, au-delà
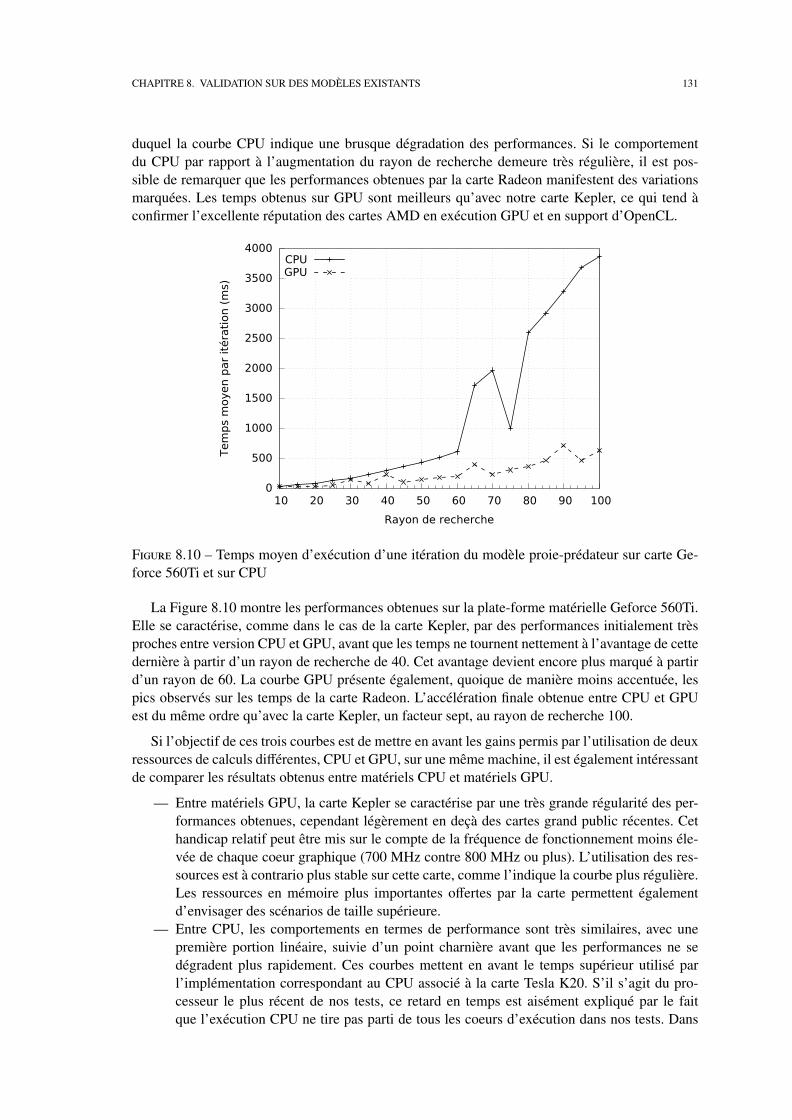
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 131
duquel la courbe CPU indique une brusque dégradation des performances. Si le comportementdu CPU par rapport à l’augmentation du rayon de recherche demeure très régulière, il est pos-sible de remarquer que les performances obtenues par la carte Radeon manifestent des variationsmarquées. Les temps obtenus sur GPU sont meilleurs qu’avec notre carte Kepler, ce qui tend àconfirmer l’excellente réputation des cartes AMD en exécution GPU et en support d’OpenCL.
0
500
1000
1500
2000
2500
3000
3500
4000
10 20 30 40 50 60 70 80 90 100
Tem
ps m
oyen p
ar
itéra
tion (
ms)
Rayon de recherche
CPUGPU
Figure 8.10 – Temps moyen d’exécution d’une itération du modèle proie-prédateur sur carte Ge-force 560Ti et sur CPU
La Figure 8.10 montre les performances obtenues sur la plate-forme matérielle Geforce 560Ti.Elle se caractérise, comme dans le cas de la carte Kepler, par des performances initialement trèsproches entre version CPU et GPU, avant que les temps ne tournent nettement à l’avantage de cettedernière à partir d’un rayon de recherche de 40. Cet avantage devient encore plus marqué à partird’un rayon de 60. La courbe GPU présente également, quoique de manière moins accentuée, lespics observés sur les temps de la carte Radeon. L’accélération finale obtenue entre CPU et GPUest du même ordre qu’avec la carte Kepler, un facteur sept, au rayon de recherche 100.
Si l’objectif de ces trois courbes est de mettre en avant les gains permis par l’utilisation de deuxressources de calculs différentes, CPU et GPU, sur une même machine, il est également intéressantde comparer les résultats obtenus entre matériels CPU et matériels GPU.
— Entre matériels GPU, la carte Kepler se caractérise par une très grande régularité des per-formances obtenues, cependant légèrement en deçà des cartes grand public récentes. Cethandicap relatif peut être mis sur le compte de la fréquence de fonctionnement moins éle-vée de chaque coeur graphique (700 MHz contre 800 MHz ou plus). L’utilisation des res-sources est à contrario plus stable sur cette carte, comme l’indique la courbe plus régulière.Les ressources en mémoire plus importantes offertes par la carte permettent égalementd’envisager des scénarios de taille supérieure.
— Entre CPU, les comportements en termes de performance sont très similaires, avec unepremière portion linéaire, suivie d’un point charnière avant que les performances ne sedégradent plus rapidement. Ces courbes mettent en avant le temps supérieur utilisé parl’implémentation correspondant au CPU associé à la carte Tesla K20. S’il s’agit du pro-cesseur le plus récent de nos tests, ce retard en temps est aisément expliqué par le faitque l’exécution CPU ne tire pas parti de tous les coeurs d’exécution dans nos tests. Dans
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 132
ces conditions, la fréquence joue un rôle très important, directement visible sur la courbecorrespondant au processeur AMD (3.2 GHz) et encore plus sur la courbe correspondantau processeur Core i7 2600K (3.4 GHz). Par comparaison, le processeur Xeon testé nefonctionne qu’à 2.5 GHz.
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 133
MIOR
Pour évaluer les performances de ce nouveau processus de distribution/rassemblement des res-sources du modèle sur GPU, nous avons choisi de comparer les performances obtenues par l’im-plémentation sur plusieurs modèles de cartes graphiques. Pour illustrer l’impact des changementsincrémentaux apportés à l’algorithme original, nous avons également testé cinq implémentationssuccessives, comprenant un nombre croissant d’adaptations pour l’architecture GPU. Dans tous lescas, le temps d’exécution moyen de 50 simulations a été retenu comme indicateur de performance.
Voici les caractéristiques des implémentations comparées :
— L’implémentation GPU 1.0 est une adaptation directe de l’algorithme et des structures dedonnées présentées, incluant seulement la suppression des dépendances d’accès aux don-nées par le biais du mécanisme de distribution/rassemblement décrit dans l’implémentationdu modèle.
— L’implémentation GPU 2.0 ajoute à l’algorithme de la première implémentation l’utilisa-tion d’une représentation alternative, plus compacte en termes d’accès, pour le stockage dela topologie du modèle. Cette représentation exige toutefois des quantités plus importantesde mémoire vive.
— L’implémentation GPU 3.0 introduit l’utilisation de la mémoire locale du périphérique(voir présentation de l’architecture GPU), au moyen de copies manuelles de données lesplus utilisées (parts de carbone) au début et à la fin de chaque pas de calcul. L’algorithmeest par ailleurs identique à celui de la seconde implémentation.
— L’implémentation GPU 4.0 introduit la possibilité de résoudre plusieurs simulations enparallèle pour chaque lancement de kernel. L’algorithme de chacune de ces simulations estidentique à la première implémentation.
— L’implémentation GPU 5.0 permet, de manière similaire à l’implémentation GPU 4.0, lelancement de plusieurs implémentations GPU 2.0 de manière simultanée.
Les deux dernières implémentations présentées, GPU 4.0 et GPU 5.0, ont pour objectif depermettre au modèle de profiter des possibilités de recouvrement d’exécution offerts par l’ordon-nanceur GPU, en s’assurant qu’il existe toujours des agents à exécuter en cas de blocage (barrière)d’une simulation particulière, comme évoqué dans nos bonnes pratiques. Le fait de disposer denombreux threads permet en effet dans ce cas au matériel de traiter d’autres agents MIOR, pen-dant que certains agents sont en attente de ressources.
Pour permettre la comparaison de ces implémentations avec la version séquentielle originale,une version CPU réalisée en Java est également incluse.
Les figures 8.11, 8.12 et 8.13 donnent le temps d’exécution de 50 simulations sur nos supportsTesla S1070, Geforce 560Ti et Tesla K20. Pour permettre une mesure de l’impact de la taille dumodèle et du nombre d’agents sur les performances, un facteur d’échelle est appliqué horizon-talement : à l’échelle 1, le modèle comprend 38 colonies microbiennes (MM) et 310 dépôts decarbone (OM). Ces nombres sont multipliés par 6 à l’échelle 6, et la taille de l’environnement estégalement modifiée pour conserver la même densité moyenne d’agents dans le modèle.
La Figure 8.11 met tout d’abord en évidence les performances obtenues sur une carte graphiqueTesla C1060 dénuée de cache. Ces courbes illustrent l’avantage initial en performance marqué enfaveur de l’implémentation GPU 2.0. Les autres variantes GPU sont plus lentes à prendre l’avan-tage sur le CPU, et ne se détachent réellement en performance qu’à partir de l’échelle 4, pourensuite continuer à offrir des performances très proches. L’amélioration de performance obtenueentre l’implémentation la plus rapide, GPU 2.0, et l’exécution sur CPU devient de l’ordre de 10 àl’échelle 10.
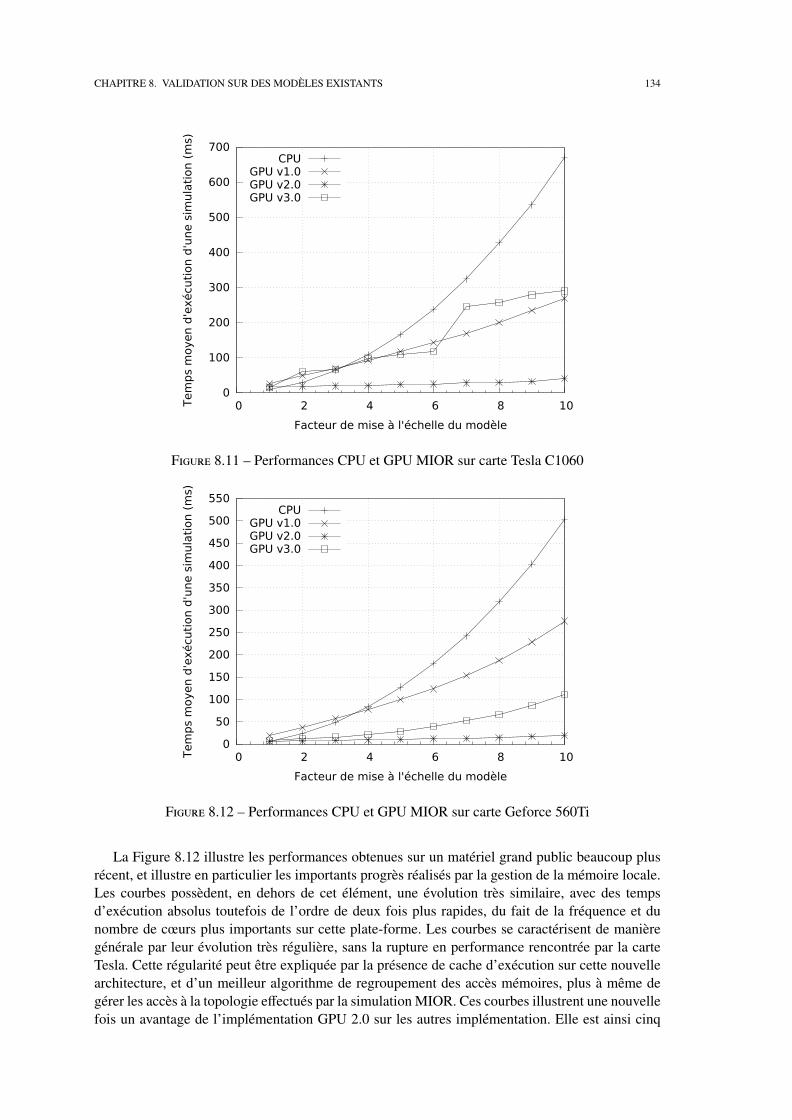
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 134
0
100
200
300
400
500
600
700
0 2 4 6 8 10Tem
ps m
oyen d
'exécuti
on d
'une s
imula
tion (
ms)
Facteur de mise à l'échelle du modèle
CPUGPU v1.0GPU v2.0GPU v3.0
Figure 8.11 – Performances CPU et GPU MIOR sur carte Tesla C1060
0
50
100
150
200
250
300
350
400
450
500
550
0 2 4 6 8 10Tem
ps m
oyen d
'exécuti
on d
'une s
imula
tion (
ms)
Facteur de mise à l'échelle du modèle
CPUGPU v1.0GPU v2.0GPU v3.0
Figure 8.12 – Performances CPU et GPU MIOR sur carte Geforce 560Ti
La Figure 8.12 illustre les performances obtenues sur un matériel grand public beaucoup plusrécent, et illustre en particulier les importants progrès réalisés par la gestion de la mémoire locale.Les courbes possèdent, en dehors de cet élément, une évolution très similaire, avec des tempsd’exécution absolus toutefois de l’ordre de deux fois plus rapides, du fait de la fréquence et dunombre de cœurs plus importants sur cette plate-forme. Les courbes se caractérisent de manièregénérale par leur évolution très régulière, sans la rupture en performance rencontrée par la carteTesla. Cette régularité peut être expliquée par la présence de cache d’exécution sur cette nouvellearchitecture, et d’un meilleur algorithme de regroupement des accès mémoires, plus à même degérer les accès à la topologie effectués par la simulation MIOR. Ces courbes illustrent une nouvellefois un avantage de l’implémentation GPU 2.0 sur les autres implémentation. Elle est ainsi cinq
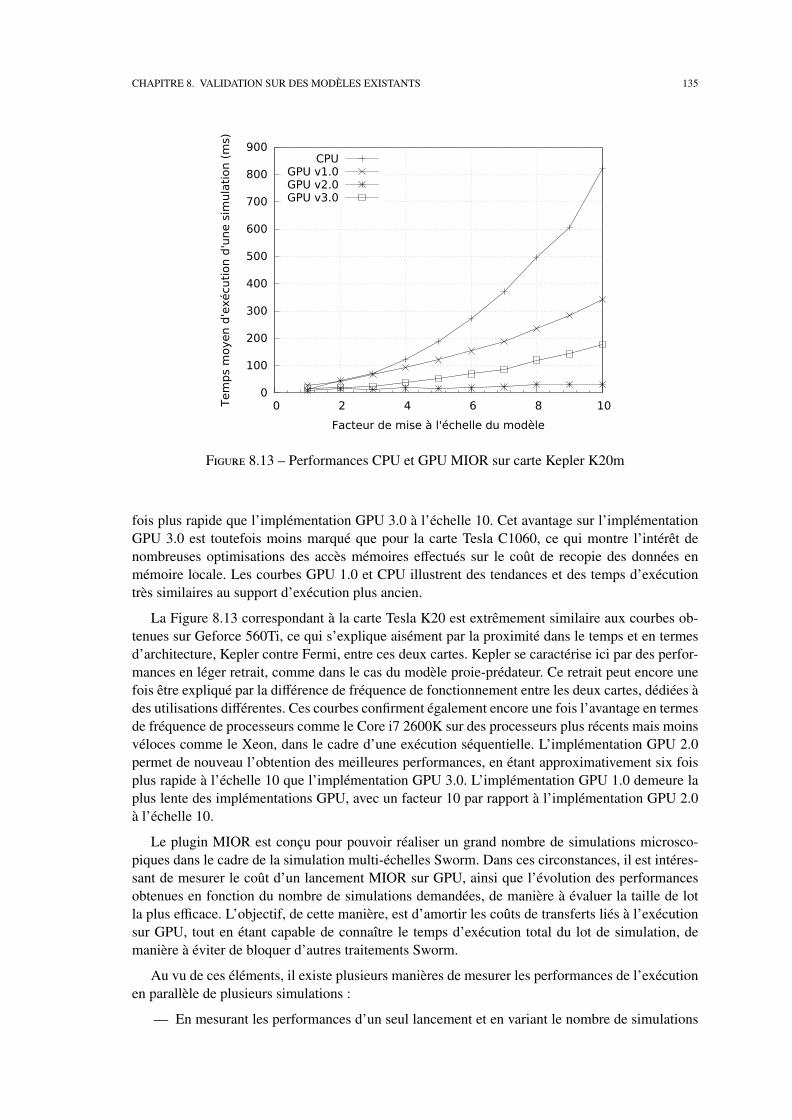
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 135
0
100
200
300
400
500
600
700
800
900
0 2 4 6 8 10Tem
ps m
oyen d
'exécuti
on d
'une s
imula
tion (
ms)
Facteur de mise à l'échelle du modèle
CPUGPU v1.0GPU v2.0GPU v3.0
Figure 8.13 – Performances CPU et GPU MIOR sur carte Kepler K20m
fois plus rapide que l’implémentation GPU 3.0 à l’échelle 10. Cet avantage sur l’implémentationGPU 3.0 est toutefois moins marqué que pour la carte Tesla C1060, ce qui montre l’intérêt denombreuses optimisations des accès mémoires effectués sur le coût de recopie des données enmémoire locale. Les courbes GPU 1.0 et CPU illustrent des tendances et des temps d’exécutiontrès similaires au support d’exécution plus ancien.
La Figure 8.13 correspondant à la carte Tesla K20 est extrêmement similaire aux courbes ob-tenues sur Geforce 560Ti, ce qui s’explique aisément par la proximité dans le temps et en termesd’architecture, Kepler contre Fermi, entre ces deux cartes. Kepler se caractérise ici par des perfor-mances en léger retrait, comme dans le cas du modèle proie-prédateur. Ce retrait peut encore unefois être expliqué par la différence de fréquence de fonctionnement entre les deux cartes, dédiées àdes utilisations différentes. Ces courbes confirment également encore une fois l’avantage en termesde fréquence de processeurs comme le Core i7 2600K sur des processeurs plus récents mais moinsvéloces comme le Xeon, dans le cadre d’une exécution séquentielle. L’implémentation GPU 2.0permet de nouveau l’obtention des meilleures performances, en étant approximativement six foisplus rapide à l’échelle 10 que l’implémentation GPU 3.0. L’implémentation GPU 1.0 demeure laplus lente des implémentations GPU, avec un facteur 10 par rapport à l’implémentation GPU 2.0à l’échelle 10.
Le plugin MIOR est conçu pour pouvoir réaliser un grand nombre de simulations microsco-piques dans le cadre de la simulation multi-échelles Sworm. Dans ces circonstances, il est intéres-sant de mesurer le coût d’un lancement MIOR sur GPU, ainsi que l’évolution des performancesobtenues en fonction du nombre de simulations demandées, de manière à évaluer la taille de lotla plus efficace. L’objectif, de cette manière, est d’amortir les coûts de transferts liés à l’exécutionsur GPU, tout en étant capable de connaître le temps d’exécution total du lot de simulation, demanière à éviter de bloquer d’autres traitements Sworm.
Au vu de ces éléments, il existe plusieurs manières de mesurer les performances de l’exécutionen parallèle de plusieurs simulations :
— En mesurant les performances d’un seul lancement et en variant le nombre de simulations
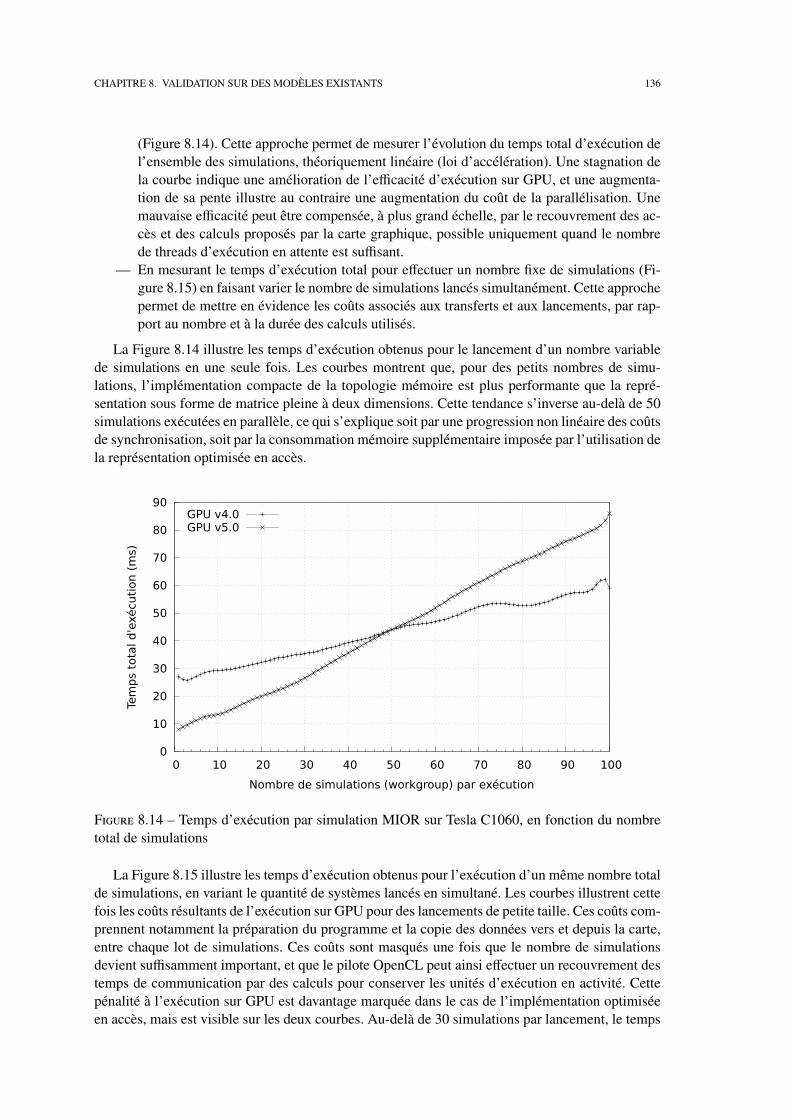
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 136
(Figure 8.14). Cette approche permet de mesurer l’évolution du temps total d’exécution del’ensemble des simulations, théoriquement linéaire (loi d’accélération). Une stagnation dela courbe indique une amélioration de l’efficacité d’exécution sur GPU, et une augmenta-tion de sa pente illustre au contraire une augmentation du coût de la parallélisation. Unemauvaise efficacité peut être compensée, à plus grand échelle, par le recouvrement des ac-cès et des calculs proposés par la carte graphique, possible uniquement quand le nombrede threads d’exécution en attente est suffisant.
— En mesurant le temps d’exécution total pour effectuer un nombre fixe de simulations (Fi-gure 8.15) en faisant varier le nombre de simulations lancés simultanément. Cette approchepermet de mettre en évidence les coûts associés aux transferts et aux lancements, par rap-port au nombre et à la durée des calculs utilisés.
La Figure 8.14 illustre les temps d’exécution obtenus pour le lancement d’un nombre variablede simulations en une seule fois. Les courbes montrent que, pour des petits nombres de simu-lations, l’implémentation compacte de la topologie mémoire est plus performante que la repré-sentation sous forme de matrice pleine à deux dimensions. Cette tendance s’inverse au-delà de 50simulations exécutées en parallèle, ce qui s’explique soit par une progression non linéaire des coûtsde synchronisation, soit par la consommation mémoire supplémentaire imposée par l’utilisation dela représentation optimisée en accès.
0
10
20
30
40
50
60
70
80
90
0 10 20 30 40 50 60 70 80 90 100
Tem
ps to
tal d
'exé
cutio
n (m
s)
Nombre de simulations (workgroup) par exécution
GPU v4.0GPU v5.0
Figure 8.14 – Temps d’exécution par simulation MIOR sur Tesla C1060, en fonction du nombretotal de simulations
La Figure 8.15 illustre les temps d’exécution obtenus pour l’exécution d’un même nombre totalde simulations, en variant le quantité de systèmes lancés en simultané. Les courbes illustrent cettefois les coûts résultants de l’exécution sur GPU pour des lancements de petite taille. Ces coûts com-prennent notamment la préparation du programme et la copie des données vers et depuis la carte,entre chaque lot de simulations. Ces coûts sont masqués une fois que le nombre de simulationsdevient suffisamment important, et que le pilote OpenCL peut ainsi effectuer un recouvrement destemps de communication par des calculs pour conserver les unités d’exécution en activité. Cettepénalité à l’exécution sur GPU est davantage marquée dans le cas de l’implémentation optimiséeen accès, mais est visible sur les deux courbes. Au-delà de 30 simulations par lancement, le temps
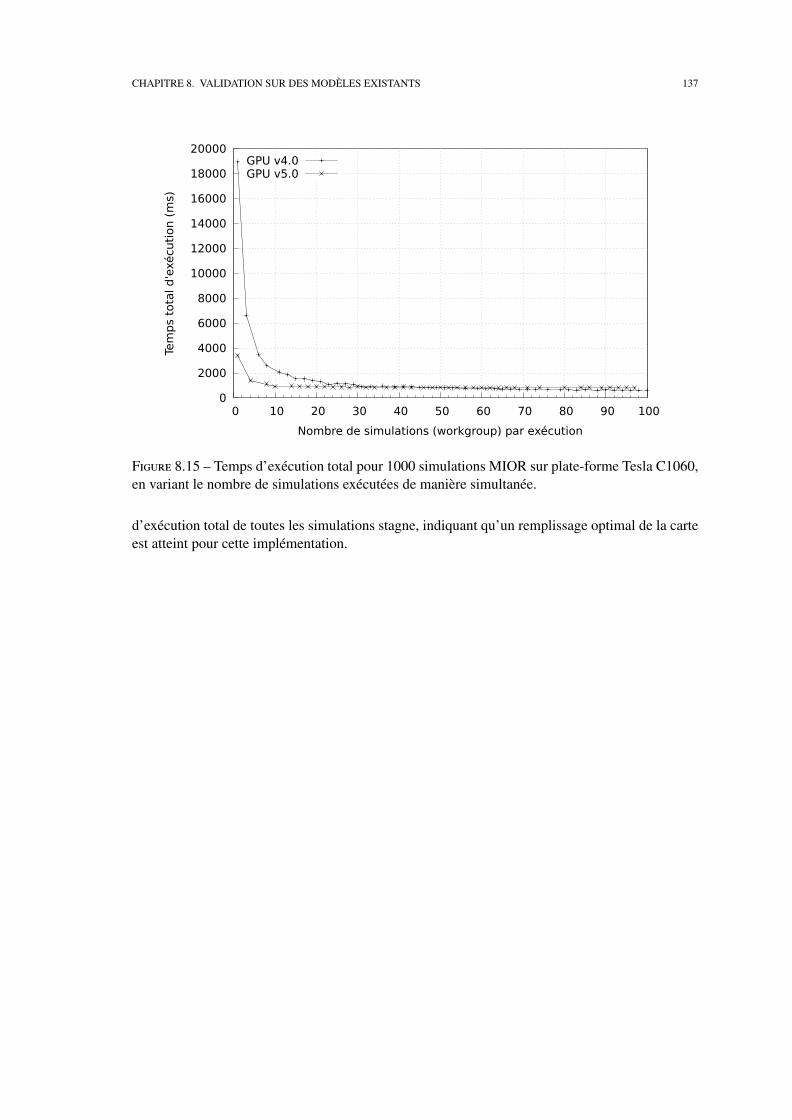
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 137
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
0 10 20 30 40 50 60 70 80 90 100
Tem
ps to
tal d
'exé
cutio
n (m
s)
Nombre de simulations (workgroup) par exécution
GPU v4.0GPU v5.0
Figure 8.15 – Temps d’exécution total pour 1000 simulations MIOR sur plate-forme Tesla C1060,en variant le nombre de simulations exécutées de manière simultanée.
d’exécution total de toutes les simulations stagne, indiquant qu’un remplissage optimal de la carteest atteint pour cette implémentation.
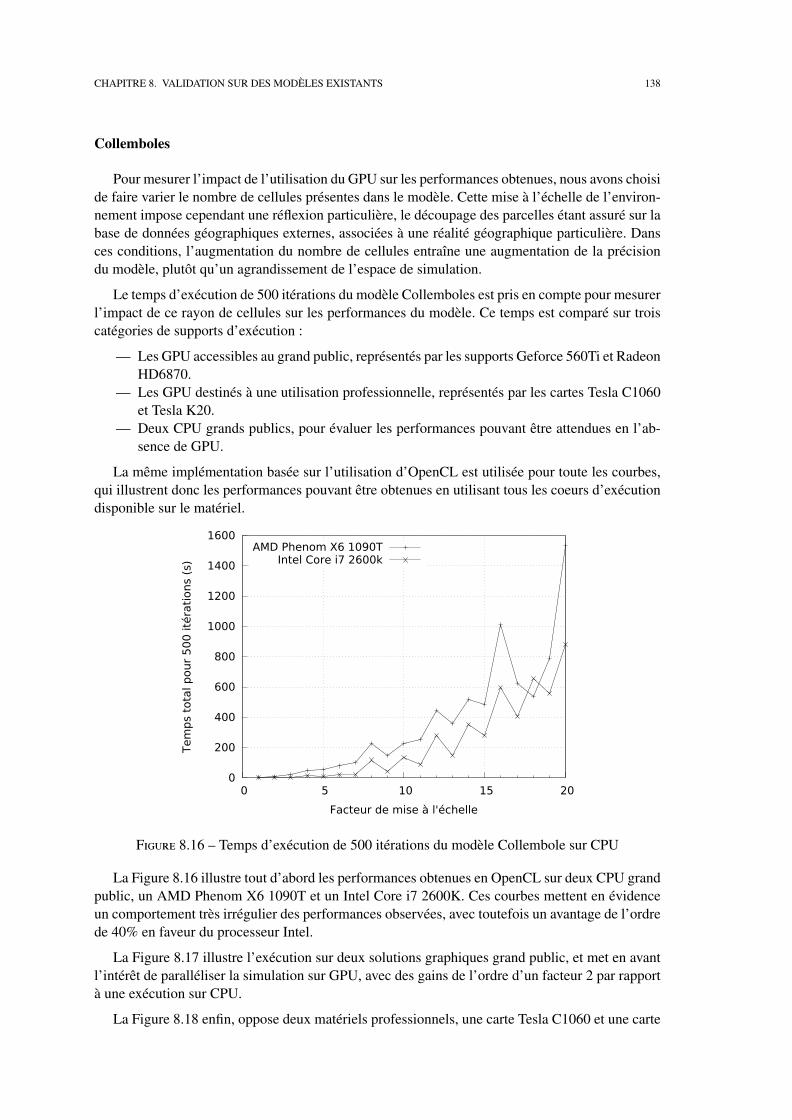
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 138
Collemboles
Pour mesurer l’impact de l’utilisation du GPU sur les performances obtenues, nous avons choiside faire varier le nombre de cellules présentes dans le modèle. Cette mise à l’échelle de l’environ-nement impose cependant une réflexion particulière, le découpage des parcelles étant assuré sur labase de données géographiques externes, associées à une réalité géographique particulière. Dansces conditions, l’augmentation du nombre de cellules entraîne une augmentation de la précisiondu modèle, plutôt qu’un agrandissement de l’espace de simulation.
Le temps d’exécution de 500 itérations du modèle Collemboles est pris en compte pour mesurerl’impact de ce rayon de cellules sur les performances du modèle. Ce temps est comparé sur troiscatégories de supports d’exécution :
— Les GPU accessibles au grand public, représentés par les supports Geforce 560Ti et RadeonHD6870.
— Les GPU destinés à une utilisation professionnelle, représentés par les cartes Tesla C1060et Tesla K20.
— Deux CPU grands publics, pour évaluer les performances pouvant être attendues en l’ab-sence de GPU.
La même implémentation basée sur l’utilisation d’OpenCL est utilisée pour toute les courbes,qui illustrent donc les performances pouvant être obtenues en utilisant tous les coeurs d’exécutiondisponible sur le matériel.
0
200
400
600
800
1000
1200
1400
1600
0 5 10 15 20
Tem
ps t
ota
l pour
50
0 ité
rati
ons (
s)
Facteur de mise à l'échelle
AMD Phenom X6 1090TIntel Core i7 2600k
Figure 8.16 – Temps d’exécution de 500 itérations du modèle Collembole sur CPU
La Figure 8.16 illustre tout d’abord les performances obtenues en OpenCL sur deux CPU grandpublic, un AMD Phenom X6 1090T et un Intel Core i7 2600K. Ces courbes mettent en évidenceun comportement très irrégulier des performances observées, avec toutefois un avantage de l’ordrede 40% en faveur du processeur Intel.
La Figure 8.17 illustre l’exécution sur deux solutions graphiques grand public, et met en avantl’intérêt de paralléliser la simulation sur GPU, avec des gains de l’ordre d’un facteur 2 par rapportà une exécution sur CPU.
La Figure 8.18 enfin, oppose deux matériels professionnels, une carte Tesla C1060 et une carte
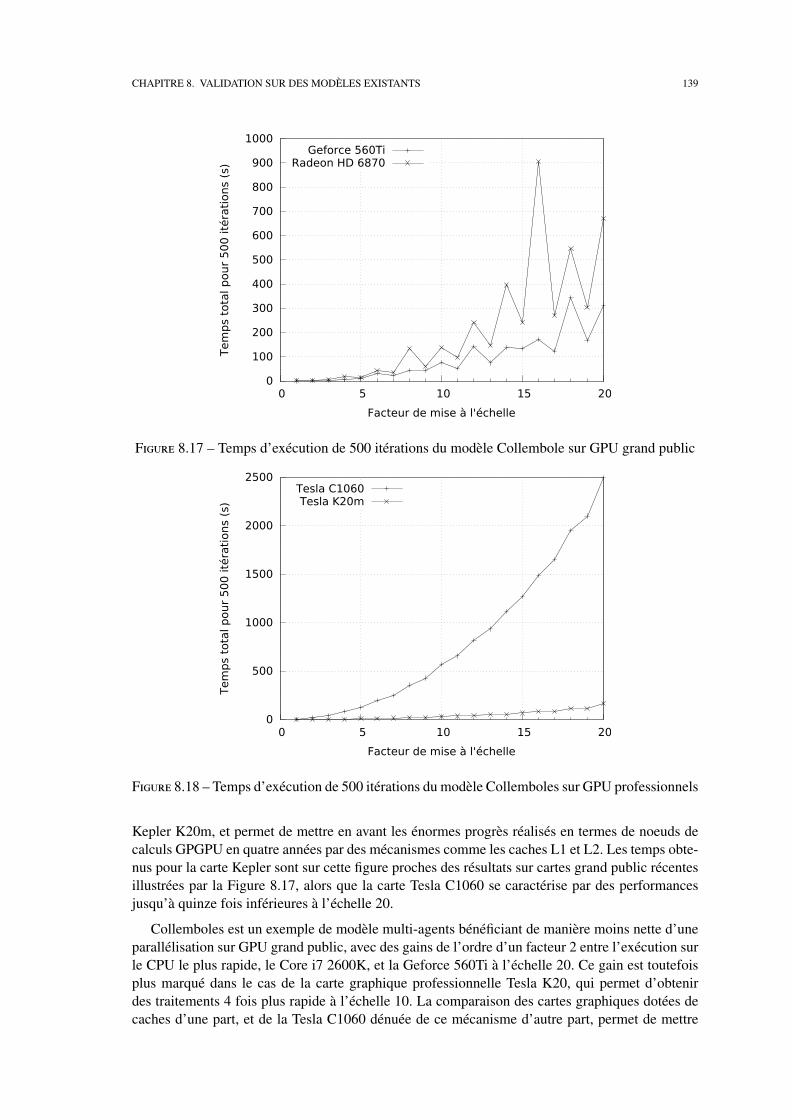
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 139
0
100
200
300
400
500
600
700
800
900
1000
0 5 10 15 20
Tem
ps t
ota
l pour
50
0 ité
rati
ons (
s)
Facteur de mise à l'échelle
Geforce 560TiRadeon HD 6870
Figure 8.17 – Temps d’exécution de 500 itérations du modèle Collembole sur GPU grand public
0
500
1000
1500
2000
2500
0 5 10 15 20
Tem
ps t
ota
l pour
50
0 ité
rati
ons (
s)
Facteur de mise à l'échelle
Tesla C1060Tesla K20m
Figure 8.18 – Temps d’exécution de 500 itérations du modèle Collemboles sur GPU professionnels
Kepler K20m, et permet de mettre en avant les énormes progrès réalisés en termes de noeuds decalculs GPGPU en quatre années par des mécanismes comme les caches L1 et L2. Les temps obte-nus pour la carte Kepler sont sur cette figure proches des résultats sur cartes grand public récentesillustrées par la Figure 8.17, alors que la carte Tesla C1060 se caractérise par des performancesjusqu’à quinze fois inférieures à l’échelle 20.
Collemboles est un exemple de modèle multi-agents bénéficiant de manière moins nette d’uneparallélisation sur GPU grand public, avec des gains de l’ordre d’un facteur 2 entre l’exécution surle CPU le plus rapide, le Core i7 2600K, et la Geforce 560Ti à l’échelle 20. Ce gain est toutefoisplus marqué dans le cas de la carte graphique professionnelle Tesla K20, qui permet d’obtenirdes traitements 4 fois plus rapide à l’échelle 10. La comparaison des cartes graphiques dotées decaches d’une part, et de la Tesla C1060 dénuée de ce mécanisme d’autre part, permet de mettre
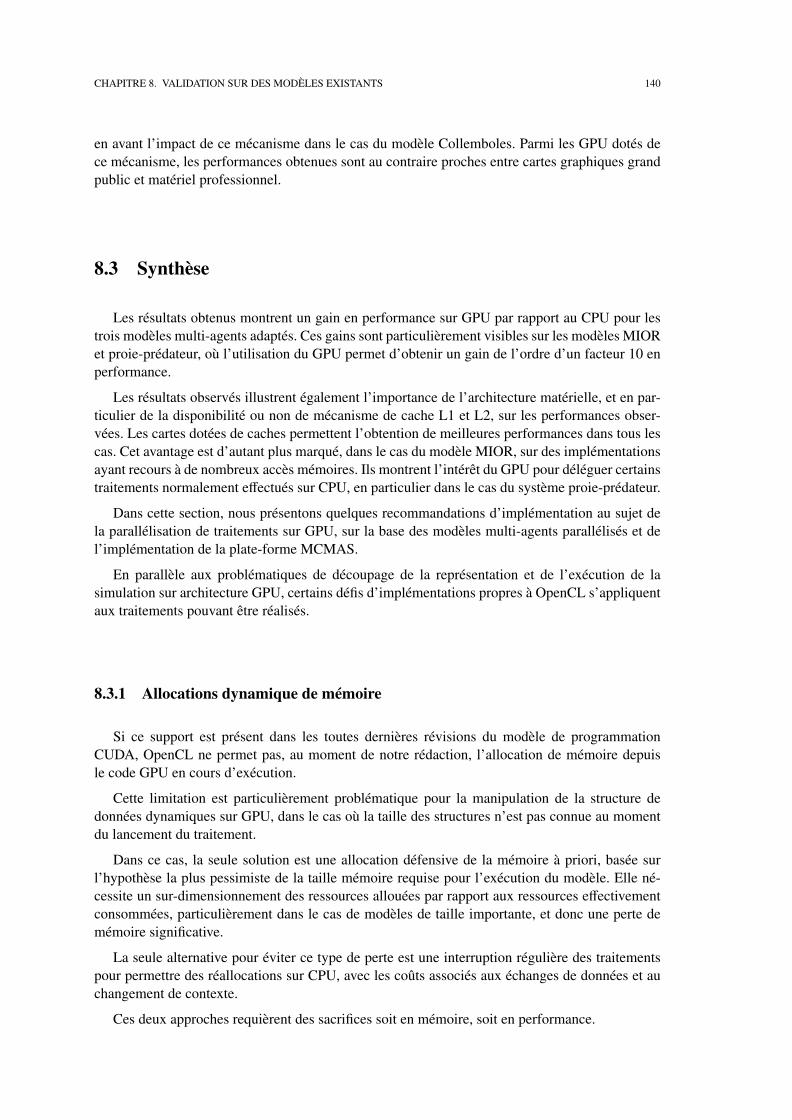
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 140
en avant l’impact de ce mécanisme dans le cas du modèle Collemboles. Parmi les GPU dotés dece mécanisme, les performances obtenues sont au contraire proches entre cartes graphiques grandpublic et matériel professionnel.
8.3 Synthèse
Les résultats obtenus montrent un gain en performance sur GPU par rapport au CPU pour lestrois modèles multi-agents adaptés. Ces gains sont particulièrement visibles sur les modèles MIORet proie-prédateur, où l’utilisation du GPU permet d’obtenir un gain de l’ordre d’un facteur 10 enperformance.
Les résultats observés illustrent également l’importance de l’architecture matérielle, et en par-ticulier de la disponibilité ou non de mécanisme de cache L1 et L2, sur les performances obser-vées. Les cartes dotées de caches permettent l’obtention de meilleures performances dans tous lescas. Cet avantage est d’autant plus marqué, dans le cas du modèle MIOR, sur des implémentationsayant recours à de nombreux accès mémoires. Ils montrent l’intérêt du GPU pour déléguer certainstraitements normalement effectués sur CPU, en particulier dans le cas du système proie-prédateur.
Dans cette section, nous présentons quelques recommandations d’implémentation au sujet dela parallélisation de traitements sur GPU, sur la base des modèles multi-agents parallélisés et del’implémentation de la plate-forme MCMAS.
En parallèle aux problématiques de découpage de la représentation et de l’exécution de lasimulation sur architecture GPU, certains défis d’implémentations propres à OpenCL s’appliquentaux traitements pouvant être réalisés.
8.3.1 Allocations dynamique de mémoire
Si ce support est présent dans les toutes dernières révisions du modèle de programmationCUDA, OpenCL ne permet pas, au moment de notre rédaction, l’allocation de mémoire depuisle code GPU en cours d’exécution.
Cette limitation est particulièrement problématique pour la manipulation de la structure dedonnées dynamiques sur GPU, dans le cas où la taille des structures n’est pas connue au momentdu lancement du traitement.
Dans ce cas, la seule solution est une allocation défensive de la mémoire à priori, basée surl’hypothèse la plus pessimiste de la taille mémoire requise pour l’exécution du modèle. Elle né-cessite un sur-dimensionnement des ressources allouées par rapport aux ressources effectivementconsommées, particulièrement dans le cas de modèles de taille importante, et donc une perte demémoire significative.
La seule alternative pour éviter ce type de perte est une interruption régulière des traitementspour permettre des réallocations sur CPU, avec les coûts associés aux échanges de données et auchangement de contexte.
Ces deux approches requièrent des sacrifices soit en mémoire, soit en performance.
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 141
8.3.2 Variabilité du support matériel
Un autre défi d’implémentation posé par l’exécution sur GPU est l’existence de multiple géné-rations de plates-formes matérielles, chacune associée à ses propres valeurs limites d’exécution ousupport de certaines fonctionnalités.
Des cartes anciennes telles que la plate-forme Tesla C1060 imposent ainsi des contraintes trèsstrictes en termes d’accès mémoires pour permettre une exécution efficace, alors que les CPU oules cartes graphiques plus modernes minimisent ces contraintes par la présence de logiques deprédictions et de cache gommant ces latences. L’impact de ces attentes est particulièrement visibledans le cas de nombreux accès aléatoires (MIOR) ou de petites tailles (Collemboles) à la mémoireglobale GPU sur des cartes dénuées de cache implicite.
Dans un souci de transparence, Nvidia propose la notion de Computing Capabilities (capacitéde calcul) pour chacune de ses cartes, indiquant les fonctionnalités CUDA et OpenCL supportéespar le matériel, et les limitations associées en termes d’exécution sur ces deux plates-formes :
— Nombre de registres utilisables par work-item et au total.— Taille maximale de work-group et de grille d’exécution.— Taille maximale pour chaque type de structure de données.— Taille maximale totale de chaque espace mémoire.
Ces deux derniers paramètres sont particulièrement importants pour des simulations manipulantde grands buffers de données. Nos expériences ont mis en avant le fait que, si sur les architecturesNVIDIA testées, la taille maximale utilisable pour des données en mémoire globale est directementliée à la mémoire physique du périphérique, ce n’est pas le cas sur des implémentations OpenCLproposées par AMD, où cette limite est fixée à une valeur inférieure par l’interface logicielle.
Ces limitations associées au matériel n’ont pas seulement une influence sur la possibilité ounon d’exécuter un traitement OpenCL, mais également sur les performances attendues. Il est alorsnécessaire d’adapter l’algorithme ou le découpage de l’exécution utilisé à ces paramètres, pourune efficacité maximale, comme évoqué dans la section suivante.
8.3.3 Adaptation aux paramètres de la plate-forme
Si le standard OpenCL impose à toutes les implémentations le support d’une base commune deprimitives et d’opérations, chaque implémentation reste libre, comme nous venons de le voir, dedéfinir ses propres limites au niveau des ressources disponibles.
Le respect du standard permet de garantir le fonctionnement du programme, mais n’assure pasl’obtention automatique des meilleures performances possibles tant sur le nombre limité de coeurspolyvalents offerts par un CPU que sur les centaines de coeurs d’un GPU.
La prise en compte dynamique du type et des limites effectivement offertes par un matériel aumoment de l’exécution est donc importante pour permettre une utilisation optimale du matérieldisponible [SFSV13].
L’adaptation la plus critique à ce niveau est celle de la taille des paquets d’exécution utili-sés, dont la valeur devra être aussi proche que possible, soit du nombre de coeurs effectivementdisponibles sur CPU, soit de l’unité de découpage d’exécution ou warp sur GPU.
La taille d’un warp est de 32 threads ou work-items sur la plupart des plates-formes GPU.Les bonnes pratiques OpenCL [Cor12] proposées par NVIDIA recommandent une taille minimalede 64 work-items pour les blocs OpenCL, de manière à permettre un recouvrement des accès
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 142
mémoires. Elle recommandent également l’utilisation de blocs de 128 à 256 work-items pour despremières expérimentations, pour ensuite ajuster cette valeur en fonction du taux d’occupationobtenu et des performances obtenues. La société fournit une feuille de calcul permettant d’estimercette occupation en fonction du modèle de carte utilisé, pour faciliter le choix d’un découpageoptimal.
Un exemple de traitement particulièrement impacté par ce choix de découpage est celui de laréduction en parallèle. Si l’utilisation d’un algorithme basé sur plusieurs passes est plus perfor-mante sur GPU, il est plus efficace sur CPU d’effectuer un simple découpage du tableau en autantde parties que de coeurs disponibles, et de réaliser l’ensemble de l’opération en un seul lancement.
Pour faciliter cette démarche, MCMAS recommande par défaut une valeur adaptée à l’archi-tecture sous-jacente (CPU, GPU ou autre). Cette valeur est également utilisée pour l’exécutionde fonctions de haut niveau par les plugins, en l’absence d’intervention de l’utilisateur. La valeuroptimale effective pour ce découpage est cependant très dépendante de l’algorithme exécuté et del’occupation résultante des ressources matérielles.
8.3.4 Différents espaces mémoires pour différentes utilisations
Comme évoqué dans notre présentation de l’architecture, les cartes graphiques disposent,contrairement aux processeurs traditionnels, de multiples espaces mémoires spécialisés. La sé-lection de l’espace mémoire dans lequel stocker chaque donnée est effectuée de manière expliciteen OpenCL, au moyen de qualificateurs utilisés pour la déclaration de la variable :
— private int data : entier en mémoire privée (accessible uniquement au work-item)— local int data : entier en mémoire locale (accessible uniquement au work-group)— global int data : entier en mémoire globale— constant int data : entier en mémoire constante
En l’absence de qualificateur, l’espace privé est utilisé pour le stockage de la variable.
La copie de données entre ces espaces mémoire n’est pas automatique et doit être explicite-ment effectuée par le programme. La mémoire locale, en particulier, ne peut de plus être initialiséeque depuis le périphérique, et requiert donc au moins une copie des données. Elle est généra-lement employée pour stocker des données intermédiaires souvent utilisées par chaque membred’un work-group, de manière à éviter son calcul ou sa récupération depuis la mémoire globale àplusieurs reprises.
La copie entre ces types de mémoire n’a pas nécessairement besoin d’être effectuée de manièretotalement manuelle : des bibliothèques telles que ELMO [FVSS13] permettent de définir desassociations entre structures de données globales et mise en cache en mémoire locale, au moyende nombreux raccourcis définis sous forme de code OpenCL.
8.3.5 Précision des données et respect des standards
Les cartes graphiques ont initialement été conçues pour effectuer des rendus en deux ou troisdimensions, avant rastérisation sur une grille graphique correspondant au périphérique d’affichage.En termes d’architectures, ce scénario d’utilisation se traduit par une forte optimisation du matérielpour le traitement de nombres flottants, suffisant pour ce type de rendu. D’éventuelles erreurs deprécision liées à ce format sont en effet mitigées par deux facteurs propres au rendu graphique :la résolution limitée d’un écran, qui contraint une projection géométrique dans une résolution
CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 143
ne dépassant pas les quelques milliers de pixels, et le nombre important d’images affichées parseconde, qui estompe toute erreur de rendu ne survenant que dans une image précise.
Cette préférence matérielle pour les flottants est particulièrement marquée, dans le cas descartes graphiques grand public, par un bridage volontaire des traitements sur des nombres endouble précision à une fraction de la fréquence du reste du GPU, pour encourager l’achat dematériel professionnel.
Ces considérations sur les performances sont particulièrement importantes pour des modèlesmulti-agents, où l’utilisation de nombres double précision est critique pour obtenir des résultatsvalides. Dans de tels systèmes multi-agents, l’utilisation de réels simple précision peut conduire àdes erreurs croissantes, susceptibles de modifier les résultats ou d’empêcher la convergence de lasimulation.
Les modèles agents employant souvent des données entières peuvent également être impactéspar ce type de disparité matérielle, ce type d’opération étant moins optimisé sur les architecturesmatérielles les plus anciennes.
En parallèle à ce choix de précision des données se pose la question du mode de calcul souhaité,compatible ou non avec le standard l’IEEE 754. Le non respect strict de ces standards permetde simplifier les calculs dans les cas les plus courants. Il ne garantit cependant plus la prise encompte correcte de valeurs telles que Nan ou l’infini dans les opérations, ou encore des valeursnon normalisées.
Le standard à utiliser pour les calculs flottants peut être configuré pour l’ensemble de l’exé-cution au moment de la compilation. Dans le cas où de telles opérations devraient être limitéesà des portions spécifiques de l’algorithme, OpenCL fournit des versions préfixées des opérationsintégrées telles que fast_sqrt, potentiellement plus rapide que sqrt.
Les compromis liés à cette recherche de performance sont dépendants de chaque plate-formeOpenCL, et peu détaillés par les fabriquants. Dans ces circonstances, l’utilisation du mode standardIEEE et des opérations par défaut est recommandé pour tout nouveau modèle, au moins en attentede validation, de manière à pouvoir évaluer ensuite l’impact de l’utilisation de flottants simpleprécision ou d’autres modes de calculs sur les résultats de la simulation.
8.3.6 Capacités mémoires physiques
La dernière limitation imposée par l’architecture GPU est la quantité de mémoire offerte parla plate-forme, de l’ordre de 6 à 8 Go sur les solutions graphiques Kepler les plus récentes. Cettequantité demeure plus limitée que sur CPU pour deux raisons :
— Le coût de la mémoire classique pour CPU, et la possibilité pour le chercheur d’étendreaisément la capacité disponible sur sa machine. 4Go de mémoire RAM est un minimum surde nombreuses machines actuelles, et l’achat de 16 ou 32Go de mémoire est aujourd’huipossible pour quelques centaines d’euros. Au contraire, la mémoire graphique doit être trèsperformante en accès, ce qui augmente son coût, et en adressage, ce qui limite sa taille.
— L’impossibilité d’utiliser, sur GPU, le disque dur ou la mémoire du système pour délé-guer de manière transparente le stockage des données supplémentaires. Si l’exploitationde la mémoire du système est facilitée par les dernières révisions des modèles d’exécutionGPGPU, il n’existe pas d’analogue à la mémoire d’échange ou au stockage permanent surcette architecture.

CHAPITRE 8. VALIDATION SUR DES MODÈLES EXISTANTS 144
Cette limitation peut poser problème pour des modèles multi-agents de taille importante, par-ticulièrement dans le cas d’utilisation de structures de données surdimensionnées pour compenserl’impossibilité d’effectuer des allocations dynamiques dans un programme OpenCL.
9Conclusion et perspectives
9.1 Conclusion
Dans ce mémoire, nous avons étudié les manières d’exécuter efficacement des systèmes multi-agents sur cartes graphiques. Cette étude a été l’occasion de mettre en avant l’intérêt des plates-formes parallèles dans le cadre des simulations multi-agents, tant en termes de ressources qu’entermes de performances. Elle nous a également permis de présenter les trois axes de parallélisationpossibles pour un système multi-agents, au niveau de l’ordonnanceur, de l’environnement ou destraitements. Cette parallélisation du système prend deux formes principales sur GPU :
— Une adaptation complète de l’exécution sur cette plate-forme, sous forme de nouveau pro-gramme.
— Une utilisation du GPU pour ne déléguer qu’une partie de la simulation, et en particulierdes traitements coûteux à même d’être parallélisés.
Ces deux approches requièrent une connaissance de la plate-forme GPU. Notre étude biblio-graphique a montré qu’il n’existait pas de plate-forme générique de parallélisation de systèmesmulti-agents permettant un libre choix entre ces deux approches. Notre solution pour permettrel’utilisation la plus large possible de type de matériel est de proposer une nouvelle bibliothèqued’exécution multi-agents, MCMAS.
Notre bibliothèque fournit de nombreux traitements multi-agents de haut niveau prêts à êtreutilisés sans aucune connaissance en parallélisation. Elle facilite l’ajout de nouveaux traitementsau moyen d’une interface de bas niveau fournissant de nombreuses structures de données et facili-tés d’exécution au développeur. Cette double approche permet une utilisation simple de MCMASet des cartes graphiques, sans pour autant imposer de cadre de modélisation ou d’exécution par-ticulier, de manière à pouvoir aisément compléter les fonctions offertes par des environnementsmulti-agents existants.
L’application de ces deux formes de parallélisation sur plusieurs exemples concrets de modèlesmulti-agents nous a permis de mettre en avant les avantages et les inconvénients associés à chacunede ces approches.
La réalisation de la totalité de la simulation multi-agents permet un contrôle fin de la modé-lisation et de l’exécution. Elle offre la possibilité d’effectuer la totalité de la simulation en unseul lancement, comme illustré dans le cas du modèle MIOR. Cette flexibilité vient toutefois auprix d’adaptations importantes en termes de données et d’exécution pour tirer pleinement partide l’architecture GPU. Ces adaptations requièrent une expertise du modèle de programmation etd’exécution pour aboutir à un résultat efficace adapté à l’architecture matérielle. La validation dumodèle n’est possible qu’une fois celui-ci fonctionnel sur la nouvelle architecture.
CHAPITRE 9. CONCLUSION ET PERSPECTIVES 146
La délégation d’une partie de la simulation permet au contraire un recours plus incrémentalau GPU, facilitant des validations intermédiaires du fonctionnement ou des résultats. Elle requiertelle aussi une expertise en parallélisme pour identifier et implémenter les traitements pouvantbénéficier d’une délégation. Cette isolation et cette encapsulation des traitements facilitent leurréutilisation dans d’autres modèles, soit directement, soit dans le cadre de plates-formes multi-agents existantes.
Dans ce mémoire, nous avons apporté une analyse des différentes méthodes de parallélisationde systèmes multi-agents sur GPU, ainsi qu’une illustration de leur utilisation avec MCMAS. Cetteillustration nous a permis de détailler ces différentes démarches et leur impact sur les performancesobtenues, ainsi que de formuler des recommandations pour la réalisation de calculs sur GPU.
9.2 Perspectives
Si la bibliothèque MCMAS est fonctionnelle et fournit déjà de nombreuses opérations utili-sées dans nos trois modèles d’études, elle représente une solution appelée à être améliorée pourrépondre à un domaine très dynamique. Au moins trois pistes d’amélioration peuvent à l’heureactuelle être envisagées.
Une première piste d’amélioration consiste à faciliter l’accès à la bibliothèque depuis de nou-veaux langages et environnements de simulation agents. De nombreux modèles ont recours à deslangages ou à des environnements particuliers pour leur exécution. C’est en particulier le cas dumodèle Sworm réalisé avec Madkit pour lequel la simulation MIOR a été conçue. Cet accès peutprendre deux formes, le développement d’une couche d’adaptation permettant l’accès direct à l’in-terface de MCMAS, ou le développement d’un agent service GPU s’intégrant de manière concep-tuelle au modèle. Cet agent est alors à même de répondre à des requêtes d’exécution et de favoriserla réalisation de calculs parallèles de manière transparente pour le reste de la simulation.
Une autre piste, complémentaire, est d’ajouter de nouvelles structures de données et opérationsà MCMAS pour répondre aux besoins de nouvelles simulations multi-agents. Si de nombreusesstructures de données rencontrées dans les systèmes agents ont déjà été implémentées, certainsmodèles agents reposent sur des graphes de données encore absents de notre bibliothèque. Desthématiques agents, comme la recherche de chemin, n’ont également pas encore été implémentées.Le développement de nouvelles opérations, et l’enrichissement des opérations existantes, est unélément important pour assurer que MCMAS soit non seulement accessible, mais également utileà de nombreux modèles agents. Le développement de nouveaux traitements agents peut égalementêtre facilité par l’intégration de bibliothèques comme ELMO [FVSS13] pour faciliter la gestion dela mémoire partagée en OpenCL.
Une dernière piste d’amélioration concerne la découverte et l’utilisation des ressources maté-rielles offertes par la machine. Si, à l’heure actuelle, MCMAS permet l’utilisation de plates-formesGPU ou CPU de manière transparente, ces architectures ne sont que quelques représentantes desarchitectures dites many-core, basées sur de nombreux coeurs d’exécution. Leur exploitation re-prend de nombreuses problématiques d’ordonnancement et de décomposition des tâches, et ouvrela voie à l’utilisation de plusieurs matériels locaux. Ces problématiques permettent égalementd’envisager la mise en place de mécanismes capables d’optimiser le passage des traitements surles ressources disponibles, de manière à pouvoir simultanément tirer parti du CPU et GPU. Detels mécanismes pourraient dans ce cas introduire une intelligence supplémentaire au niveau dechaque traitement, pour choisir l’algorithme et les types de données les plus adaptés à chaquematériel d’exécution.

CHAPITRE 9. CONCLUSION ET PERSPECTIVES 147
Publications
Chapitre de livre
— Guillaume Laville, Christophe Lang, Bénédicte Herrmann, Laurent Philippe, Kamel Ma-zouzi, and Nicolas Marilleau. Implementing Multi-Agent Systems on GPU. In RaphaëlCouturier, editor, Designing Scientific Applications on GPUs, Numerical Analysis andScientific Computing, chapter 18, pages 413–439. Chapman and Hall/CRC, 2013.
Conférences
— Guillaume Laville, Christophe Lang, Nicolas Marilleau, Kamel Mazouzi, and Laurent Phi-lippe. Using GPU for Multi-agent Soil Simulation. In PDP 2013, 21st Euromicro In-ternational Conference on Parallel, Distributed and Network-based Computing, Belfast,Ireland, pages 392–399, February 2013. IEEE Computer Society Press.
— Guillaume Laville, Kamel Mazouzi, Christophe Lang, Nicolas Marilleau, Bénédicte Herr-mann, and Laurent Philippe. MCMAS : a toolkit to benefit from many-core architecturein agent-based simulation. In PADAPS 2013, 1st Workshop on Parallel and DistributedAgent-Based Simulations, in conjunction with EuroPar 2013, volume 8374 of LNCS, Aa-chen, Germany, pages 544–554, August 2013. Springer.
— Guillaume Laville, Kamel Mazouzi, Christophe Lang, Nicolas Marilleau, and Laurent Phi-lippe. Using GPU for Multi-agent Multi-scale Simulations. In DCAI’12, 9-th Int. Conf.on Advances in Intelligent and Soft Computing, volume 151 of Advances in Intelligent andSoft Computing, Salamanca, Spain, pages 197–204, March 2012. Springer.
Communications
— Présentation d’un poster "MCSMA : A library for multi-agent simulations on many-core architectures" au séminaire FEMTO-ST du 26 juin 2013 à la CCI du Doubs.
— Présentation "Accélération d’une simulation de sol sur GPU" aux journées RégionGrand Est (RGE) du 14 février 2013 à Belfort.
— Présentation "Portage d’une simulation multi-agents sur GPU" aux journées RégionGrand Est (RGE) du 9 juin 2011 à Metz.

Bibliographie
[AG13] Nevena Ilieva-Litova Alan Gray, Anders Sjöström. Best Practice mini-guide accele-rated clusters. Using General Purpose GPUs. http://www.prace-project.eu/IMG/pdf/Best-Practice-Guide-GPGPU.pdf, 2013. [En ligne ; vérifié le 27 avril 2014].
[amd] AMD Accelerated Parallel Processing Math Libraries (APPML).http://developer.amd.com/tools-and-sdks/heterogeneous-computing/amd-accelerated-parallel-processing-math-libraries/. [En ligne ; vérifié le 26avril 2014].
[Amd67] Gene M. Amdahl. Validity of the Single Processor Approach to Achieving LargeScale Computing Capabilities. In Proceedings of the April 18-20, 1967, Spring JointComputer Conference, AFIPS ’67 (Spring), pages 483–485, New York, NY, USA,1967. ACM.
[APS10] B. G. Aaby, K. S. Perumalla, and S. K. Seal. Efficient simulation of agent-basedmodels on multi-GPU and multi-core clusters. In Proceedings of the 3rd Interna-tional ICST Conference on Simulation Tools and Techniques, SIMUTools ’10, pages29 :1–29 :10, ICST, Brussels, Belgium, Belgium, 2010. ICST (Institute for ComputerSciences, Social-Informatics and Telecommunications Engineering).
[ASÁ01] Elaini S Angelotti, Edson E Scalabrin, and Bráulio C Ávila. PANDORA : a multi-agent system using paraconsistent logic. In Computational Intelligence and Multime-dia Applications, 2001. ICCIMA 2001. Proceedings. Fourth International Conferenceon, pages 352–356. IEEE, 2001.
[ATN09] Cédric Augonnet, Samuel Thibault, and Raymond Namyst. Automatic Calibration ofPerformance Models on Heterogeneous Multicore Architectures. In 3rd Workshop onHighly Parallel Processing on a Chip (HPPC 2009), Delft, Pays-Bas, August 2009.
[BBMC+10] Arnaud Banos, Annabelle Boffet-Mas, Sonia Chardonnel, Christophe Lang, NicolasMarilleau, and Thomas Thévenin. Simuler la mobilité urbaine quotidienne : le projetMIRO. In Arnaud Banos and Thomas Thévenin, editors, Mobilités urbaines et risquesdes transports - approches géographiques, chapter 2, pages 51–86. Hermès, 2010.
[BCC+11] E. Blanchart, C. Cambier, C. Canape, B. Gaudou, T.-N. Ho, T.-V. Ho, C. Lang, F. Mi-chel, N. Marilleau, and L. Philippe. EPIS : A Grid Platform to Ease and OptimizeMulti-agent Simulators Running. In PAAMS, volume 88 of Advances in Intelligentand Soft Computing, pages 129–134. Springer, 2011.
[BCG07] Fabio Luigi Bellifemine, Giovanni Caire, and Dominic Greenwood. DevelopingMulti-Agent Systems with JADE. Wiley, 2007.
[BDM04] Jacques M. Bahi, Stéphane Domas, and Kamel Mazouzi. Jace : A Java Environmentfor Distributed Asynchronous Iterative Computations. In PDP, pages 350–357. IEEEComputer Society, 2004.
[BETVG08] Herbert Bay, Andreas Ess, Tinne Tuytelaars, and Luc Van Gool. Speeded-Up RobustFeatures (SURF). Comput. Vis. Image Underst., 110(3) :346–359, June 2008.
BIBLIOGRAPHIE 150
[BG09] Nathan Bell and Michael Garland. Implementing Sparse Matrix-vector Multiplicationon Throughput-oriented Processors. In Proceedings of the Conference on High Per-formance Computing Networking, Storage and Analysis, SC ’09, pages 18 :1–18 :11,New York, NY, USA, 2009. ACM.
[Ble09] A. Bleiweiss. Multi Agent Navigation on the GPU. GDC09 Game Developers Confe-rence 2009, 2009.
[BMD+09] E. Blanchart, N. Marilleau, A. Drogoul, E. Perrier, JL. Chotte, and C. Cambier.SWORM : an agent-based model to simulate the effect of earthworms on soil struc-ture. EJSS. European Journal of Soil Science, 60 :13–21, 2009.
[BPL+06] Lars Braubach, Alexander Pokahr, Winfried Lamersdorf, Karl-Heinz Krempels, andPeer-Oliver Woelk. A generic time management service for distributed multi-agentsystems. Applied Artificial Intelligence, 20(2-4) :229–249, 2006.
[Bra00] G. Bradski. Dr. Dobb’s Journal of Software Tools, 2000.
[BRT11] B. Beresini, S. Ricketts, and M.B. Taylor. Unifying manycore and FPGA proces-sing with the RUSH architecture. In Adaptive Hardware and Systems (AHS), 2011NASA/ESA Conference on, pages 22–28, June 2011.
[CCC+12] M. Carillo, G. Cordasco, R. De Chiara, F. Raia, V. Scarano, and F. Serrapica. En-hancing the Performances of D-MASON - A Motivating Example. In SIMULTECH,pages 137–143, 2012.
[CCDCS11] B Cosenza, G Cordasco, R. De Chiara, and V. Scarano. Distributed Load Balancingfor Parallel Agent-based Simulations. In 19th Euromicro International Conferenceon Parallel, Distributed and Network-Based Computing, Ayia Napa, Cyprus, 2011.
[CCM+11] Gennaro Cordasco, Rosario Chiara, Ada Mancuso, Dario Mazzeo, Vittorio Scarano,and Carmine Spagnuolo. A Framework for Distributing Agent-Based Simulations.In Euro-Par 2011 : Parallel Processing Workshops, volume 7155 of Lecture Notes inComputer Science, pages 460–470, 2011.
[CCP07] M. Bousso C. Cambier, D. Masse and E. Perrier. An offer versus demand modellingapproach to assess the impact of micro-organisms spatio-temporal dynamics on soilorganic matter decomposition rates. Ecological Modelling, pages 301–313, 2007.
[CDD+13] Chongxiao Cao, Jack Dongarra, Peng Du, Mark Gates, Piotr Luszczek, and StanimireTomov. clMAGMA : High Performance Dense Linear Algebra with OpenCL. 2013.
[CDFD10] F Chuffart, N Dumoulin, T Faure, and G Deffuant. SimExplorer : Programming Ex-perimental Designs on Models and Managing Quality of Modelling Process. IJAEIS,1(1) :55–68, 2010.
[CDJM01] Brahim Chaib-Draa, Imed Jarras, and Bernard Moulin. Systèmes multi-agents : prin-cipes généraux et applications. Edition Hermès, 2001.
[CDK+01] Robit Chandra, Leonardo Dagum, Dave Kohr, Dror Maydan, Jeff McDonald, andRamesh Menon. Parallel Programming in OpenMP. Morgan Kaufmann PublishersInc., San Francisco, CA, USA, 2001.
[CGH+12] Simon Coakley, Marian Gheorghe, Mike Holcombe, Shawn Chin, David Worth, andChris Greenough. Exploitation of High Performance Computing in the FLAMEAgent-Based Simulation Framework. In Geyong Min, Jia Hu, Lei (Chris) Liu, Lau-rence Tianruo Yang, Seetharami Seelam, and Laurent Lefevre, editors, HPCC-ICESS,pages 538–545. IEEE Computer Society, 2012.
BIBLIOGRAPHIE 151
[CGU+11] José M. Cecilia, José M. Garcia, Manuel Ujaldon, Andy Nisbet, and Martyn Amos.Parallelization Strategies for Ant Colony Optimisation on GPUs. In IPDPS Work-shops, pages 339–346. IEEE, 2011.
[CKQ+07] Jean-Christophe Castella, Suan Pheng Kam, Dang Dinh Quang, Peter H. Verburg, andChu Thai Hoanh. Combining top-down and bottom-up modelling approaches of landuse/cover change to support public policies : Application to sustainable managementof natural resources in northern Vietnam. Land Use Policy, 24(3) :531 – 545, 2007.Integrated Assessment of the Land System : The Future of Land Use.
[clp] clpp : OpenCL Data Parallel Primitives Library. https://code.google.com/p/clpp/. [Enligne ; vérifié le 26 avril 2014].
[CN11] Nicholson Collier and Michael North. Repast HPC : A platform for large-scale agent-based modeling. Wiley, 2011.
[Cor12] Nvidia Corporation. OpenCL Best Practices Guide. http://www.nvidia.com/content/cudazone/CUDABrowser/downloads/papers/NVIDIA_OpenCL_BestPracticesGuide.pdf, 2012. [En ligne ; vérifié le 26 avril 2014].
[cud09] NVIDIA CUDA C Programming Best Practices Guide CUDA Toolkit 2.3. NVIDIACorporation, 2009.
[DARG12] Denis Demidov, Karsten Ahnert, Karl Rupp, and Peter Gottschling. Program-ming CUDA and OpenCL : A Case Study Using Modern C++ Libraries. CoRR,abs/1212.6326, 2012.
[Del13] Audrey Delévacq. Métaheuristiques pour l’optimisation combinatoire sur processusgraphiques (GPU). Thèse de doctorat, Université de Reims Champagne-Ardenne,France, February 2013.
[Dem] D. Demidov. VexCL : Vector Expression Template Li-brary for OpenCL. http://www.codeproject.com/Articles/415058/VexCL-Vector-expression-template-library-for-OpenCL. [En ligne ; vérifié le27 avril 2014].
[DLMK09] Roshan M. D’Souza, Mikola Lysenko, Simeone Marino, and Denise Kirschner. Data-parallel Algorithms for Agent-based Model Simulation of Tuberculosis on GraphicsProcessing Units. In Proceedings of the 2009 Spring Simulation Multiconference,SpringSim ’09, pages 21 :1–21 :12, San Diego, CA, USA, 2009. Society for ComputerSimulation International.
[DLR07] R. M. D’souza, M. Lysenko, and K. Rahmani. Sugarscape on Steroids : SimulatingOver a Million Agents at Interactive Rates. In Proceedings of the Agent 2007 Confe-rence, 2007.
[DP93] J.E. Doran and M. Palmer. ’Contrasting models of upper palaeolithic social dyna-mics : a distributed artificial intelligence approach’. In Aarhus University Press., edi-tor, J. Andresen, T. Madsen and I. Scollar (Eds.) : Computing the Past - Proceedingsof Computer Applications and Quantitative Methods in Archaeology Conference 1992(CAA 92), pages pp.251–262„ 1993.
[DSJD02] Luis T. Da Silva Joao and Y. Demazeau. Vowels co-ordination model. In AAMAS,pages 1129–1136, Italy, 2002.
[DvdHD08] Christophe Deissenberg, Sander van der Hoog, and Herbert Dawid. EURACE : Amassively parallel agent-based model of the European economy. Applied Mathema-tics and Computation, 204(2) :541 – 552, 2008. Special Issue on New Approaches inDynamic Optimization to Assessment of Economic and Environmental Systems.
BIBLIOGRAPHIE 152
[Fer95] J. Ferber. Les systèmes multi-agents : vers une intelligence collective. InterEditions,Paris, 1995.
[fip] FIPA Specifications Published in 1997. http://www.fipa.org/repository/fipa97.html.[En ligne ; vérifié le 26 avril 2014].
[FSN09] L. Fischer, R. Silveira, and L. Nedel. GPU Accelerated Path-Planning for Multi-agents in Virtual Environments. In Proceedings of the 2009 VIII Brazilian Symposiumon Games and Digital Entertainment, SBGAMES ’09, pages 101–110, Washington,DC, USA, 2009. IEEE Computer Society.
[Fuj03] Richard M Fujimoto. Parallel simulation : distributed simulation systems. In Pro-ceedings of the 35th conference on Winter simulation : driving innovation, pages124–134. Winter Simulation Conference, 2003.
[FVSS13] Jianbin Fang, Ana Lucia Varbanescu, Jie Shen, and Henk Sips. ELMO : A User-Friendly API to Enable Local Memory in OpenCL Kernels. 16th Euromicro Confe-rence on Parallel, Distributed and Network-Based Processing (PDP 2008), 0 :375–383, 2013.
[Gar70] M. Gardner. The fantastic combinations of John Conway’s new solitaire game “life”.Scientific American, 223 :120–123, October 1970.
[GBHS11] Chris Gregg, Michael Boyer, Kim Hazelwood, and Kevin Skadron. Dynamic hete-rogeneous scheduling decisions using historical runtime data. Workshop on Applica-tions for Multi-and Many-Core Processors (A4MMC), 2011.
[GCK+09] S. J. Guy, Jatin Chhugani, Changkyu Kim, Nadathur Satish, Ming C. Lin, DineshManocha, and Pradeep Dubey. ClearPath : Highly Parallel Collision Avoidance forMulti-Agent Simulation. In ACM SIGGRAPH/EUROGRAPHICS SYMPOSIUM ONCOMPUTER ANIMATION, pages 177–187. ACM, 2009.
[GF00a] O. Gutknecht and J. Ferber. MadKit : a generic multi-agent platform. In Proceedingsof the fourth international conference on Autonomous agents, AGENTS ’00, pages78–79, New York, NY, USA, 2000. ACM.
[GF00b] Olivier Gutknecht and Jacques Ferber. The MADKIT Agent Platform Architecture.In In Agents Workshop on Infrastructure for Multi-Agent Systems, pages 48–55, 2000.
[GGDK09] Stéphane Galland, Nicolas Gaud, Jonathan Demange, and Abderrafiaa Koukam. En-vironment Model for Multiagent-Based Simulation of 3D Urban Systems. 2009.
[Gut01] Olivier Gutknecht. Proposition d’un modèle organisationnel générique de systèmesmulti-agents. PhD thesis, Universite de Montpellier II, Montpellier, France, 2001.
[Hag73] P. Haggett. Analyse spatiale en géographie humaine. Armand Colin, Paris, 1973.,62(1) :125–127, 1973.
[HCS06] Mike Holcombe, Simon Coakley, and Rod Smallwood. A General Framework foragent-based modelling of complex systems. In Proceedings of the 2006 EuropeanConference on Complex Systems, 2006.
[HNR68] P.E. Hart, N.J. Nilsson, and B. Raphael. A Formal Basis for the Heuristic Determina-tion of Minimum Cost Paths. Systems Science and Cybernetics, IEEE Transactionson, 4(2) :100–107, July 1968.
[Jac98] Henrik Klinge Jacobsen. Integrating the bottom-up and top-down approach to energy-economy modelling : the case of Denmark. Energy Economics, 20(4) :443 – 461,1998.
BIBLIOGRAPHIE 153
[JGLG09] J.-I. Benavides J. Gómez-Luna, J.-M. González-Linares and N. Guil. Parallelizationof a Video Segmentation Algorithm on CUDA—Enabled Graphics Processing Units.In 15th Euro-Par Conference, pages 924–935, Berlin, Heidelberg, 2009. Springer-Verlag.
[JOF03] H. Van Dyke Parunak J. Odell and M. Fleischer. Software engineering for large-scale multi-agent systems. chapter The role of roles in designing effective agentorganizations, pages 27–38. Springer-Verlag, Berlin, Heidelberg, 2003.
[Joh12] Haakan Johansson. Volume Raycasting Performance Using DirectCompute. http://hgpu.org/?p=9050, 2012. [En ligne ; vérifié le 26 avril 2014].
[Khr08] Khronos OpenCL Working Group. The OpenCL Specification, version 1.0.29, 8 De-cember 2008.
[KRH+10] M. Kiran, P. Richmond, M. Holcombe, L. S. Chin, D. Worth, and C. Greenough.FLAME : simulating large populations of agents on parallel hardware architectures.In Proceedings of the 9th International Conference on Autonomous Agents and Mul-tiagent Systems : volume 1 - Volume 1, AAMAS ’10, pages 1633–1636, Richland, SC,2010. International Foundation for Autonomous Agents and Multiagent Systems.
[KRR10] T. Karmakharm, P. Richmond, and D. Romano. Agent-based Large Scale Simula-tion of Pedestrians With Adaptive Realistic Navigation Vector Fields. In Theory andPractice of Computer Graphics (TPCG) 2010, pages 67–74, 2010.
[KSL+12] Jungwon Kim, Sangmin Seo, Jun Lee, Jeongho Nah, Gangwon Jo, and Jaejin Lee.SnuCL : An OpenCL Framework for Heterogeneous CPU/GPU Clusters. In Procee-dings of the 26th ACM International Conference on Supercomputing, ICS ’12, pages341–352, New York, NY, USA, 2012. ACM.
[Mae90] P. Maes. Designing Autonomous Agents : Theory and Practice from Biology to Engi-neering and Back. A Bradford book. MIT Press, 1990.
[MBF02] Fabien Michel, Pierre Bommel, and Jacques Ferber. Simulation distribuée interactivesous MadKit. In JFSMA, pages 175–178, 2002.
[McF87] D. McFarland. The Oxford companion to animal behaviour. Oxford Paperback Re-ference. Oxford University Press, 1987.
[MCM12] Longfei Ma, Xue Chen, and Zhouxiang Meng. A performance Analysis of the Gameof Life based on parallel algorithm. CoRR, abs/1209.4408, 2012.
[Mes09] Message Passing Interface Forum. MPI : A Message-Passing Interface Standard,Version 2.2. Specification, September 2009.
[MFD09] Fabien Michel, Jacques Ferber, and Alexis Drogoul. Multi-Agent Systems and Simu-lation : a Survey From the Agents Community’s Perspective. In Adelinde UhrmacherDanny Weyns, editor, Multi-Agent Systems : Simulation and Applications, Computa-tional Analysis, Synthesis, and Design of Dynamic Systems, page 47. CRC Press -Taylor & Francis, May 2009.
[MGR+11] Perhaad Mistry, Chris Gregg, Norman Rubin, David Kaeli, and Kim Hazelwood. Ana-lyzing Program Flow Within a Many-kernel OpenCL Application. In Proceedings ofthe Fourth Workshop on General Purpose Processing on Graphics Processing Units,GPGPU-4, pages 10 :1–10 :8, New York, NY, USA, 2011. ACM.
[Mic02] Fabien Michel. Introduction to Turtlekit : A Platform for Building Logo Based Multi-Agent Simulations with Madkit. Technical Report 9557, 2002.
BIBLIOGRAPHIE 154
[Mic13] Fabien Michel. Intégration du calcul sur GPU dans la plate-forme de simulationmulti-agent générique TurtleKit 3. In Salima Hassas and Maxime Morge, editors,JFSMA, pages 189–198. Cepadues Editions, 2013.
[net] NetLogo Models Library : Life. http://ccl.northwestern.edu/netlogo/models/Life. [Enligne ; vérifié le 26 avril 2014].
[NSL+11] Veynu Narasiman, Michael Shebanow, Chang Joo Lee, Rustam Miftakhutdinov, OnurMutlu, and Yale N. Patt. Improving GPU Performance via Large Warps and Two-level Warp Scheduling. In Proceedings of the 44th Annual IEEE/ACM InternationalSymposium on Microarchitecture, MICRO-44, pages 308–317, New York, NY, USA,2011. ACM.
[ope] OpenCL 1.2 Reference Pages - Restrictions. http://www.khronos.org/registry/cl/sdk/1.2/docs/man/xhtml/restrictions.html. [En ligne ; vérifié le 26 avril 2014].
[pan] Pandora : An HPC Agent-Based Modelling framework. https://www.bsc.es/computer-applications/pandora-hpc-agent-based-modelling-framework. [En ligne ;vérifié le 26 avril 2014].
[rep] Repast HPC Manual. repast.sourceforge.net/docs/RepastHPCManual.pdf. [En ligne ;vérifié le 26 avril 2014].
[Rey87] Craig W. Reynolds. Flocks, Herds and Schools : A Distributed Behavioral Model. InProceedings of the 14th Annual Conference on Computer Graphics and InteractiveTechniques, SIGGRAPH ’87, pages 25–34, New York, NY, USA, 1987. ACM.
[RHK06] Sebastian Rodriguez, Vincent Hilaire, and Abder Koukam. A Holonic Approach toModel and Deploy Large Scale Simulations. In Luis Antunes and Keiki Takadama,editors, MABS, volume 4442 of Lecture Notes in Computer Science, pages 112–127.Springer, 2006.
[Ric11] Paul Richmond. FLAME GPU Technical Report and User Guide (CS-11-03). Tech-nical report, Department of Computer Science, University of Sheffield, 2011.
[RR08] P. Richmond and D. Romano. A High Performance Framework For Agent BasedPedestrian Dynamics on GPU hardware. European Simulation and Modelling, 2008.
[RRB+08] Shane Ryoo, Christopher I. Rodrigues, Sara S. Baghsorkhi, Sam S. Stone, David B.Kirk, and Wen-mei W. Hwu. Optimization Principles and Application PerformanceEvaluation of a Multithreaded GPU Using CUDA. In Proceedings of the 13th ACMSIGPLAN Symposium on Principles and Practice of Parallel Programming, PPoPP’08, pages 73–82, New York, NY, USA, 2008. ACM.
[RWCR10] Paul Richmond, Dawn Walker, Simon Coakley, and Daniela Romano. High perfor-mance cellular level agent-based simulation with FLAME for the GPU. Briefings inBioinformatics, 2010.
[RWR10] Karl Rupp, Josef Weinbub, and Florian Rudolf. Automatic Performance Optimiza-tion in ViennaCL for GPUs. In Proceedings of the 9th Workshop on Parallel/High-Performance Object-Oriented Scientific Computing, POOSC ’10, pages 6 :1–6 :6,New York, NY, USA, 2010. ACM.
[SFF+10] Renato Silveira, Leonardo Fischer, José Antônio Salini Ferreira, Edson Prestes, andLuciana Nedel. Path-planning for RTS games based on potential fields. In Pro-ceedings of the Third international conference on Motion in games, MIG’10, pages410–421, Berlin, Heidelberg, 2010. Springer-Verlag.
BIBLIOGRAPHIE 155
[SFS10] Antoine Spicher, Nazim A. Fatès, and Olivier Simonin. Translating Discrete Multi-Agents Models into Cellular Automata, Application to Diffusion-Limited Aggre-gation. CCIS 67 Communications in Computer and Information Sciences series,67 :270–282, January 2010.
[SFSV13] Jie Shen, Jianbin Fang, Henk Sips, and Ana Lucia Varbanescu. Performance Traps inOpenCL for CPUs. In Proceedings of the 2013 21st Euromicro International Confe-rence on Parallel, Distributed, and Network-Based Processing, PDP ’13, pages 38–45, Washington, DC, USA, 2013. IEEE Computer Society.
[Skl11] E. Sklar. NetLogo, a multi-agent simulation environment. Artificial Life, 13(3) :303–311, 2011.
[SMH+10] Aamir Shafi, Jawad Manzoor, Kamran Hameed, Bryan Carpenter, and Mark Baker.Multicore-enabling the MPJ Express Messaging Library. In Proceedings of the 8thInternational Conference on the Principles and Practice of Programming in Java,PPPJ ’10, pages 49–58, New York, NY, USA, 2010. ACM.
[SN09] D. Strippgen and K. Nagel. Multi-agent traffic simulation with CUDA. 2009 Inter-national Conference on High Performance Computing Simulation, pages 106–114,2009.
[TPO10] Stanley Tzeng, Anjul Patney, and John D. Owens. Task Management for Irregular-parallel Workloads on the GPU. In Proceedings of the Conference on High Per-formance Graphics, HPG ’10, pages 29–37, Aire-la-Ville, Switzerland, Switzerland,2010. Eurographics Association.
[UIN12] Akihiro Uchida, Yasuaki Ito, and Koji Nakano. An Efficient GPU Implementationof Ant Colony Optimization for the Traveling Salesman Problem. 2013 Internatio-nal Conference on Computing, Networking and Communications (ICNC), 0 :94–102,2012.
[VQC02] G. Vitaglione, F. Quarta, and E. Cortese. Scalability and Performance of JADE Mes-sage Transport System. http://jade.tilab.com/papers/Final-ScalPerfMessJADE.pdf?,2002. [En ligne ; vérifié le 27 avril 2014].
[WD92] Eric Werner and Yves Demazeau. The design of multi-agent systems. DecentralizedAI, 3 :3–30, 1992.
[Wei13] Robin M. Weiss. Accelerating Swarm Intelligence Algorithms with GPU-Computing.In David A. Yuen, Long Wang, Xuebin Chi, Lennart Johnsson, Wei Ge, and YaolinShi, editors, GPU Solutions to Multi-scale Problems in Science and Engineering,Lecture Notes in Earth System Sciences, pages 503–515. Springer Berlin Heidelberg,2013.
[Wil74] A.G. Wilson. Urban and Regional Models in Geography and Planning. A Wiley-Interscience publication. John Wiley & Sons Incorporated, 1974.
[WLL+] John Wawrzynek, Mingjie Lin, Ilia Lebedev, Shaoyi Cheng, and Daniel Burke. 1Rethinking FPGA Computing with a Many-Core Approach.
[WRC12] Peter Wittek and Xavier Rubio-Campillo. Scalable agent-based modelling with cloudHPC resources for social simulations. In Cloud Computing Technology and Science(CloudCom), 2012 IEEE 4th International Conference on, pages 355–362. IEEE,2012.
[WSTaM12] Sandra Wienke, Paul Springer, Christian Terboven, and Dieter an Mey. OpenACC :First Experiences with Real-world Applications. In Proceedings of the 18th Interna-tional Conference on Parallel Processing, Euro-Par’12, pages 859–870, Berlin, Hei-delberg, 2012. Springer-Verlag.
BIBLIOGRAPHIE 156
[ZG12] L. Zaoralek and P. Gajdos. CUDA code support in multiagent platform JADE. InIntelligent Systems Design and Applications (ISDA), 2012 12th International Confe-rence on, pages 546–551, Nov 2012.


Résumé :
Ces dernières années ont consacré l’émergence du parallélisme dans la plupart des branches de l’informatique.Au niveau matériel, tout d’abord, du fait de la stagnation des fréquences de fonctionnement des unités decalcul. Au niveau logiciel, ensuite, avec la popularisation de nombreuses plates-formes d’exécution parallèle.Une forme de parallélisme est également présente dans les systèmes multi-agents, qui facilitent la description desystèmes complexes comme ensemble d’entités en interaction. Si l’adéquation entre ce parallélisme d’exécutionlogiciel et conceptuel semble naturelle, la parallélisation reste une démarche difficile, du fait des nombreusesadaptations devant être effectuées et des dépendances présentes explicitement dans de très nombreux systèmesmulti-agents.Dans cette thèse, nous proposons une solution pour faciliter l’implémentation de ces modèles sur une plate-forme d’exécution parallèle telle que le GPU. Notre bibliothèque MCMAS vient répondre à cette problématiqueau moyen de deux interfaces de programmation, une couche de bas niveau MCM permettant l’accès direct àOpenCL et un ensemble de plugins utilisables sans connaissances GPU. Nous étudions ensuite l’utilisation decette bibliothèque sur trois systèmes multi-agents existants : le modèle proie-prédateur, le modèle MIOR etle modèle Collemboles. Pour montrer l’intérêt de cette approche, nous présentons une étude de performancede chacun de ces modèles et une analyse des facteurs contribuant à une exécution efficace sur GPU. Nousdressons enfin un bilan du travail et des réflexions présentées dans notre mémoire, avant d’évoquer quelquespistes d’amélioration possibles de notre solution.
Mots-clés : Framework de simulation, Système multi-agents, Many-core, GPU, Calcul haute performance
Abstract:
These last years have seen the emergence of parallelism in many fields of computer science. This is explainedby the stagnation of the frequency of execution units at the hardware level and by the increasing usage ofparallel platforms at the software level. A form of parallelism is present in multi-agent systems, that facilitatethe description of complex systems as a collection of interacting entities. If the similarity between this softwareand this logical parallelism seems obvious, the parallelization process remains difficult in this case because ofthe numerous dependencies encountered in many multi-agent systems.In this thesis, we propose a common solution to facilitate the adaptation of these models on a parallel platformsuch as GPUs. Our library, MCMAS, provides access to two programming interface to facilitate this adaptation:a low-level layer providing direct access to OpenCL, MCM, and a high-level set of plugins not requiring anyGPU-related knowledge. We study the usage of this library on three existing multi-agent models : predator-prey,MIOR and Collembola. To prove the interest of the approach we present a performance study for each modeland an analysis of the various factors contributing to an efficient execution on GPUs. We finally conclude on aoverview of the work and results presented in the report and suggest future directions to enhance our solution.
Keywords: Simulation framework, Multi-agents system, Many-core, GPU, High-performance computing