factory automation melfa family - agenziaemap.com · garanzia di qualità e montaggio di...
TRANSCRIPT

FACTORY AUTOMATION
MELFA FAMiLyRobot industriali
Robot antropomorfi
Robot SCARA
Controller ad alte prestazioni
Software di programmazione
Simulazione
2
L’impatto globale
La visione di Mitsubishi Electric: cambiamenti positivi per un futuro migliore.
Riuniamo le menti migliori per creare le tecnologie migliori. In Mitsubishi Elec-tric, sappiamo che la tecnologia è il prin-cipale motore del cambiamento nella vita di tutti noi. Integrando tecnologia e innovazione, realizziamo cambiamenti positivi che possano semplificare la vita di tutti i giorni, massimizzare l’efficienza delle aziende e facilitare tutti i processi che al suo interno si svolgono.
Mitsubishi Electric è impegnata in molteplici settori, tra i quali:
Gestione dell’energia
Un’ampia gamma di prodotti per la distribuzione dell’energia e per la sua gestione, dai generatori ai visualizzatori di grande formato.
Dispositivi elettronici
Un’ampia gamma di dispositivi e semiconduttori avanzati per sistemi e prodotti.
Apparecchiature domestiche
Prodotti affidabili per il settore consumer, come condizionatori d’aria e sistemi di home entertainment.
Sistemi di informazione e comunicazione
Apparecchiature, prodotti e sistemi commerciali e di consumo.
Sistemi di automazione industriale
Per massimizzare la produttività e l’efficienza grazie a un’avanzata tecnologia di automazione.
L’impatto globale di Mitsubishi Electric

3
indice
indice
Prestazioni in dettaglio 4–5
Precisione e flessibilità 6–7
La tecnica in dettaglio 8–9
Software per robot industriali 10
Your solution partner 11

4
Robot industriali MELFA
Prestazioni in dettaglioRobot da € 1,65/hCalcolato in base alla vita media utile, di circa 6–7 anni in applicazioni tipiche, i robot Mitsubishi Electric hanno un co-sto d’acquisto sorprendentemente bas-so di € 1,65/h, comprendente sia il costo d’acquisto che quello di funzionamento.
Alloggiamento chiuso e IP54 per la massima protezione e igiene.
I cavi e i flessibili cablati internamente non si impigliano nelle appa-recchiature periferiche.
Servomotori Mitsubishi Electric per il massimo livello di potenza e velocità.
Idoneo per il posizionamento di componenti ad alta preci-sione con una ripetibilità di ± 0,005 mm e un tempo ciclo di appena 0,28 s.
Il primo robot SCARA con braccio gemellato al mondo con struttura parallela per la massima precisione.
VersatilitàDal 1978, i robot compatti operano in più di 30.000 applicazioni nei più diversi settori d’impiego: sono ininterrottamente all’opera, 24 ore al giorno, 7 giorni su sette.

5
Robot industriali MELFA
Un’intelligente costruzione metallica e una struttura a doppio braccio conferiscono ai robot una solidità e precisione particolarmente elevate.
La trasmissione ad alta precisione Harmonic Drive contribuisce a garantire una ripetibilità eccezionale.
Programmazione sempliceUna potente gamma di robot richie-de un’interfaccia di programmazione ugualmente potente e di facile utilizzo. I pacchetti RT Toolbox2 e MELFA WORKS di Mitsubishi Electric sono potenti tool di programmazione e simulazione, re-alizzati su misura per le esigenze dei robot.
Un design estremamente compatto richiede uno spazio minimo per applica-zioni in spazi limitati.
Tutte le pinze dei robot antropomorfi sono conformi alla norma ISO 9409-1.
Funzionalità di reteI collegamenti a reti quali Ethernet, Profibus, Profinet, DeviceNet™ e CC-Link facilitano l’integrazione dei controller dei robot Mitsubishi Electric in grandi sistemi, consentendo agli utilizzatori di accedere ad ogni fase del processo.
6
Precisione
industria farmaceuticaControlli dalla concezione modulare e certificazioni per l’industria farmaceu-tica fanno dei robot MELFA il partner ideale nel campo della bioscienza. La connessione integrata a database e un utilizzo di concezione globale permet-tono applicazioni modulari e flessibili per ogni settore in cui si deve assicu-rare la trasparenza di qualità e dati di produzione.
Precisione e flessibilità
Mercato AlimentareCon i robot MELFA sono tutelati anche in futuro i crescenti requisiti igienici, la varietà di prodotti e la rintracciabilità dei processi di produzione.
Dettagli innovativi e rigide direttive per i robot MELFA assicurano una garanzia di qualità anche in applicazioni dove la genuinità è elevata.
AutomotiveI robot MELFA, precisi ed estremamente flessibili, vengono impiegati dove i det-tagli sono importanti: rilievi a tasteggio, garanzia di qualità e montaggio di com-ponenti complessi. I robot MELFA assol-vono i loro compiti ad altissima velocità, ed ininterrottamente.

7
Flessibilità
ConfezionamentoAltissime prestazioni e flessibilità sono ovvie nei robot MELFA. Altrettanto ovvia è la grande facilità d’integrazione di tutti i componenti d’automazione Mitsubishi Electric, quali assi supplementari, con-trolli a PLC o terminali operativi, connes-sione a telecamere e sincronizzazione di nastri trasportatori. Con queste funzio-ni, i compiti di confezionamento sono certamente eseguibili con sicurezza e continuità.
Elettronica e costruzioni meccanicheMitsubishi Electric offre una vasta gam-ma di prodotti, dai robot a bracci pa-ralleli per il micro-montaggio di minuti componenti. Non esiste applicazione che non sia fatta per i robot MELFA. Che siano camere bianche o ambienti sporchi, oleosi e polverosi, la gamma di prodotti offre sempre il robot giusto per la vostra applicazione.
FormazioneImparare dalla pratica: un obiettivo che con i robot MELFA compatti e leggeri è già realizzabile in ambiente scolastico. Facile programmazione, possibilità di simulazioni e partner esperti nel cam-po della didattica facilitano gli esordi nella robotica.
Nessun limite: anche per complessi progetti di ricerca in università, i robot MELFA con interfacce standard in tem-po reale offrono tutte le opportunità di impiego dei robot come manipolatori, al di là della semplice programmazione.
8
Caratteristiche tecniche
La tecnica in dettaglio
Più sicurezzaLo standard di sicurezza a norma DIN ISO-10218 è univoco per tutti i ro-bot, garantendo così un esercizio sicu-ro in tutte le applicazioni. La gamma di prodotti complementari della Mitsubishi Electric con controllori di sicurezza aiuta a integrare i robot in un concetto uni-tario di sicurezza. Progetti d’esempio preconfezionati rendono possibile a chiunque strutturare facilmente, veloce-mente ed efficacemente sistemi anche complessi.
La tecnologia opzionale di sicurezza “MELFA SafePlus“ per i controller dei robot della serie F comprende funzioni quali limitazione della velocità, dell’area di lavoro e della coppia, attivabili su in-gressi di sicurezza. Con queste funzioni si possono limitare le apparecchiature di sicurezza e ridurre lo spazio sotto pro-tezione, che porta a risparmi di costo e spazio, pur soddisfacendo tutti i requisiti di sicurezza.
Guida Robot ed elaborazione d’immaginiI robot industriali della Mitsubishi Electric sono collegabili via interfaccia Ethernet o RS232 dei controlli dei ro-bot a qualsiasi sistema a telecamere per l’oggettivazione. Risulta così realizzabile l’acquisizione della corretta posizione di parti statiche e in movimento.
Le opportunità d’impiego dei robot guidati da sensori nell’automazione di fabbrica sono variegate e spaziano dal montaggio di componenti fino alla lo-calizzazione e al prelievo di oggetti da un nastro trasportatore, passando per il controllo qualità e la rilavorazione di pezzi.
Serie F-Q – piena funzionalità PLC nel robotNon avendo il robot un impiego Stand Alone, il sistema deve essere facilmen-te integrabile in un ambiente di lavo-ro per poter comunicare con sistemi a PLC e motion e anche con dispositivi operativi e altri sistemi. La iQ Platform della Mitsubishi Electric offre, con la CPU modulare del robot, la base ideale per integrare nel controllo del robot la piena varietà di funzioni di un PLC – essendo in ciò innovativa nella tecnica d’auto-mazione.

9
Caratteristiche tecniche
Facile integrazione in applicazioni complesseAl controllo del robot si possono di-rettamente collegare con un solo cavo fino a otto altri assi supplementari. Due di questi assi possono essere utilizzati come ulteriori assi d’interpolazione, per esempio come settimo e ottavo asse del robot. La particolarità nel confronto con altri sistemi è che tutti gli assi collega-ti a supplemento sono programmabili proprio come il robot – e questo con lo stesso teaching box o il software stan-dard RT Toolbox2. Si annullano così costi aggiuntivi per software, formazione e programmazione.
Funzioni di monitoraggio e manutenzione più efficientiIl collegamento diretto via Ethernet dei terminali operativi GOT di proprie-tà della casa schiudono, a partire dallo stabilimento, una varietà di funzioni di monitoraggio, controllo e manuten-zione nel robot. La rettifica di punti di apprendimento, la funzione di back-up e ripristino, l’inserimento di dati di pro-duzione o la selezione e il controllo di processi sono solo alcune delle possi-bilità dei terminali operativi Mitsubishi Electric associati ai robot MELFA.
Comunicazione aperta per connessioni PCIl controller del robot si lascia connet-tere a un sistema MES senza arresti di produzione, ad esempio per modificare facilmente e velocemente cicli di lavo-razione.
Si può d’altronde realizzare un pilotag-gio in tempo reale del robot per qualsia-si tipo di movimento. Sono così attuabili movimenti flessibili e complessi, genera-ti graficamente a PC, ad esempio.
Ethernet

10
Software per robot industriali
Programmazione e simulazione
Robot industriali dalle potenti presta-zioni hanno bisogno di un software dalle prestazioni altrettanto poten-ti. Per questo, sempre più ingegneri d’automazione optano per il software Mitsubishi Electric, poliedrico e agevole. Generazione di progetti, programmazio-ne o simulazione, non ha importanza: i compiti in tutti questi settori vengono svolti in modo intuitivo e ad incastro perfetto. Il risultato sono cicli ottimali di movimentazione in tempi brevissimi di installazione e avviamento.
Programmazione
Programmazione offline e online con simulazione
Simulazione
Import di CAD 3D e fino a 16 robot simu-labili in un progetto, connessione di assi supplementari e apprendimento diretto di posizioni nella simulazione
Parametri
Parametri strutturati per una facile im-postazione di funzioni; visione comples-siva di tutti i parametri con presentazio-ne dei soli valori modificati.
Manutenzione
Funzione completa di back-up e ripri-stino e anche controllo di frequenze di manutenzione, tempi di marcia in pro-duzione e cicli di prodotto.
Monitoraggio
Visualizzazione di correnti di carico, valori di posizione, variabili e posizio-ni mutevoli. Monitoraggio di segnali di comando, ciclo di programma e storico degli errori.
Documentazione
Documentazione completa del progetto con emissione dei parametri modificati, del codice di programma e di posizioni.
Simulazione in 3D con MELFA WorksIl tool di add-in MELFA Works per Solid Works permette di simulare su un PC un robot in un sistema di produzione, convertendo le corse del pezzo in la-vorazione in dati posizionali del robot.
La piattaforma Solid Works integrata con MELFA Works amplia le funzioni di simulazione e apre nuove possibilità di simulazione.
Dati CAD dell’impianto leggibili direttamente
Collegamento di pinze direttamente sul robot
Manipolazione di pezzi in lavora-zione
Insegnamento non in linea in am-biente 3D
Generazione di programmi robot
Verifica della prova di collisione tra robot e impianto
il comodo terminale operativo per la mobilità dell’insegnamentoL’R56TB è un dispositivo operativo dalle potenti prestazioni per assolvere tutte le mansioni direttamente sul robot: dal controllo del robot, la visualizzazione dei carichi con display degli ingressi e delle uscite fino alla completa generazione del programma e alla sua parametrizza-zione. Le ricche funzioni provvedono a un utilizzo ottimale del sistema robotico riducendo così i tempi di allestimento.
Con l’attacco USB integrato si possono comodamente scambiare via stick dati in mobilità e registrare o salvare back-up completi del controllo.
Simulazione di un robot industriale Mitsubishi Electric direttamente in un’applicazione.
Sezione Informazioni Tecniche
Sistemi robot industriali

Ulteriori servizi di assistenza
Questa parte catalogo del prodotto si propone di fornirvi una panoramica della vasta robot industriali gamma RV-F, RH-FH e RP-ADH. Se non riuscite a trovare in questo catalogo le informazioni che cercate, esistono diversi modi per avere maggiori dettagli su problemi tecnici e configurazioni, prezzi e disponibilità.
Per problemi tecnici e maggiori informazioni visitate il sito web https://it3a.mitsubishielectric.com. Il nostro sito web offre in modo sem-plice e veloce l’accesso ad ulteriori dati e dettagli dell’ultimo minuto sui nostri prodotti e servizi. I manuali e i cataloghi sono disponibili in diverse lingue e possono essere scaricati gratuitamente.
Per questioni tecniche, di configurazione, prezzo e disponibilità, contattate i nostri distributori e partner. I partner Mitsubishi Electric sono felici di rispondere alle vostre domande tecniche o di assistervi nella realizzazione di una configurazione. Per avere un elenco dei partner Mitsubishi Electric consultate il retro di questo catalogo o, guardate la sezione “Contatti” del nostro sito web https:// it3a. mitsubishielectric.com.
Avvertenze relative al presente catalogo
Questo catalogo offre una panoramica dei prodotti in fornitura. Per il layout del sistema, la configurazione, l’installazione e l’uso dei robot industriali e degli accessori occorre osservare a integrazione le informazioni nei manuali dei dispositivi utilizzati. Assicuratevi che tutti i sistemi da voi allestiti con i dispositivi di questo catalogo siano sicuri, rispondano alle vostre esigenze e rispettino le norme di configura-zione definite nei manuali degli stessi dispositivi.
Specifiche soggette a cambiamenti senza preavviso. Tutti i marchi commerciali registrati sono soggetti a copyright. © Mitsubishi Electric Europe B.V., Factory Automation – European Business Group
I prodotti Mitsubishi Electric Europe B.V. riportati e descritti in questo catalogo non necessitano di un’autorizzazione all’esportazione né risultano iscritti nella lista dual-use.
Opuscoli
Ulteriori pubblicazioni nell‘ambito della gamma di automazione industriale
Famiglia HMI
Catalogo generale riguardante i pannelli operatore, software di supervisione e accessori.
Famiglia MRCatalogo generale per servoamplificatori e servomotori, nonché motion controller e accessori
Famiglia FX
Catalogo dei controllori logici programmabili compatti e accessori della famiglia MELSEC FX
Famiglia Q/L
Catalogo dei controllori logici programmabili modulari e accessori della serie MELSEC PLC.
Famiglia FRCatalogo prodotti per convertitori di frequenza e accessori
Famiglia LVS
Catalogo generale per apparecchi elettrici a bassa tensione, relè e relè di massima corrente
Automation Book
Panoramica di tutti i prodotti Mitsubishi Electric per l’automazione, come inverter, servosistemi e sistemi motion, robot ecc.
3
Contenuto
1
2
3
4
5
1 Robot Panoramica dei robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Funzioni speciali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Robot industriali RV-2F(L)(B) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 Robot industriali RV-4FLM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 Robot industriali RV-7FM/7FLM/7FLLM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 Robot industriali RV-13FM/RV-13FLM/RV-20FM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 Robot industriali RP-1ADH, RP-3ADH und RP-5ADH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 Robot industriali RH-1FHR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 Robot industriali RH-3FHR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 Robot industriali RH-3FH/6FH/12FH/20FH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 Panoramica dei sistemi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2 Controller Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 Dimensioni delle unità di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3 Accessori Tastiera di programmazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 Sensore di forza, MELFA SafePlus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 Set di cavi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 Set di valvole pneumatiche, Soffietti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 Schede di espansione opzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 Cavi adattatori e connettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 Tubi e cavi di espansione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 Cavo di attacco PC, I/O, cassa di protezione e batterie tampone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 Descrizione generale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Linguaggio di programmazione MELFA-BASIC IV/V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5 Software RT Toolbox2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 MELFA-Works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4
1
Pano
ram
ica de
i robo
t
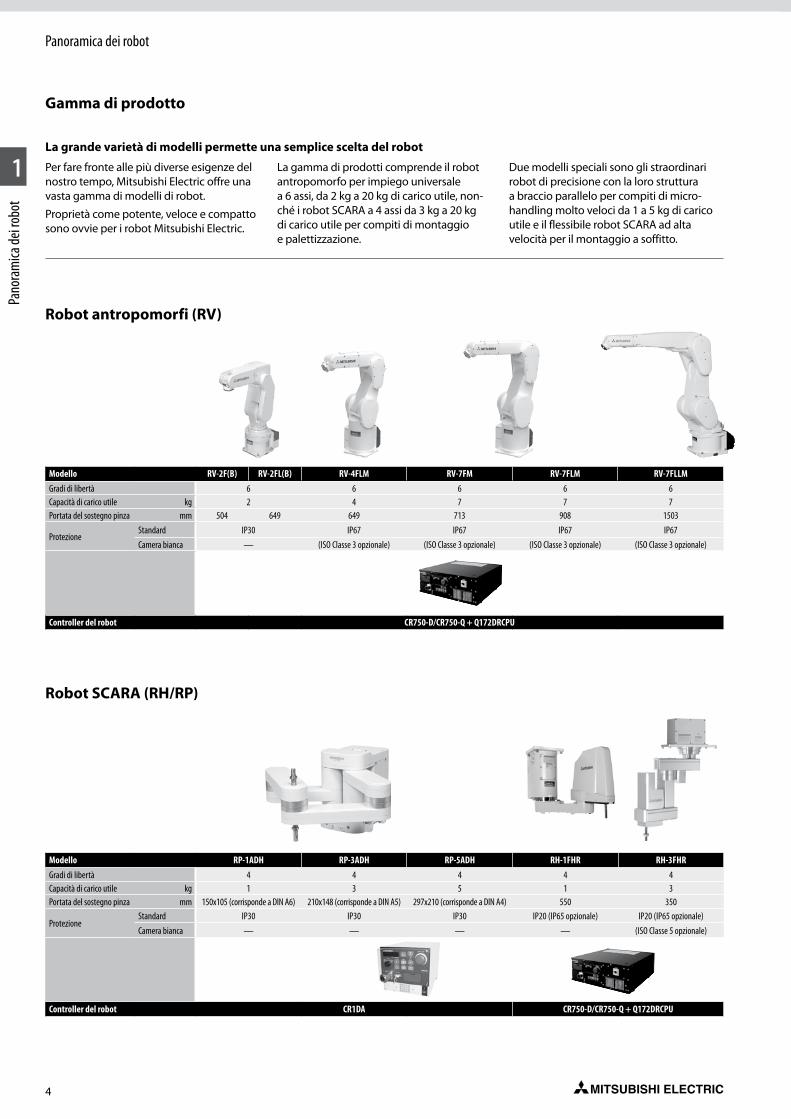
Modello RV-2F(B) RV-2FL(B) RV-4FLM RV-7FM RV-7FLM RV-7FLLM RV-13FM RV-13FLM RV-20FMGradi di libertà 6 6 6 6 6 6 6 6Capacità di carico utile kg 2 4 7 7 7 13 13 20Portata del sostegno pinza mm 504 649 649 713 908 1503 1094 1388 1094
ProtezioneStandard IP30 IP67 IP67 IP67 IP67 IP67 IP67 IP67Camera bianca — (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale)
Controller del robot CR750-D/CR750-Q + Q172DRCPU CR750-D/CR750-Q + Q172DRCPU
Robot antropomorfi (RV)
Modello RP-1ADH RP-3ADH RP-5ADH RH-1FHR RH-3FHR RH-3FH5515 RH-6FH5520 RH-12FH8535 RH-20FH10035Gradi di libertà 4 4 4 4 4 4 4 4 4Capacità di carico utile kg 1 3 5 1 3 3 6 12 20Portata del sostegno pinza mm 150x105 (corrisponde a DIN A6) 210x148 (corrisponde a DIN A5) 297x210 (corrisponde a DIN A4) 550 350 550 550 850 1000
ProtezioneStandard IP30 IP30 IP30 IP20 (IP65 opzionale) IP20 (IP65 opzionale) IP20 IP54 (IP65 opzionale) IP54 (IP65 opzionale) IP54 (IP65 opzionale)Camera bianca — — — — (ISO Classe 5 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale)
Controller del robot CR1DA CR750-D/CR750-Q + Q172DRCPU CR750-D/CR750-Q + Q172DRCPU
Robot SCARA (RH/RP)
Panoramica dei robot
Gamma di prodotto
La grande varietà di modelli permette una semplice scelta del robot
Per fare fronte alle più diverse esigenze del nostro tempo, Mitsubishi Electric offre una vasta gamma di modelli di robot.
Proprietà come potente, veloce e compatto sono ovvie per i robot Mitsubishi Electric.
La gamma di prodotti comprende il robot antropomorfo per impiego universale a 6 assi, da 2 kg a 20 kg di carico utile, non-ché i robot SCARA a 4 assi da 3 kg a 20 kg di carico utile per compiti di montaggio e palettizzazione.
Due modelli speciali sono gli straordinari robot di precisione con la loro struttura a braccio parallelo per compiti di micro-handling molto veloci da 1 a 5 kg di carico utile e il flessibile robot SCARA ad alta velocità per il montaggio a soffitto.

5
1
Modello RV-2F(B) RV-2FL(B) RV-4FLM RV-7FM RV-7FLM RV-7FLLM RV-13FM RV-13FLM RV-20FMGradi di libertà 6 6 6 6 6 6 6 6Capacità di carico utile kg 2 4 7 7 7 13 13 20Portata del sostegno pinza mm 504 649 649 713 908 1503 1094 1388 1094
ProtezioneStandard IP30 IP67 IP67 IP67 IP67 IP67 IP67 IP67Camera bianca — (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale)
Controller del robot CR750-D/CR750-Q + Q172DRCPU CR750-D/CR750-Q + Q172DRCPU
Modello RP-1ADH RP-3ADH RP-5ADH RH-1FHR RH-3FHR RH-3FH5515 RH-6FH5520 RH-12FH8535 RH-20FH10035Gradi di libertà 4 4 4 4 4 4 4 4 4Capacità di carico utile kg 1 3 5 1 3 3 6 12 20Portata del sostegno pinza mm 150x105 (corrisponde a DIN A6) 210x148 (corrisponde a DIN A5) 297x210 (corrisponde a DIN A4) 550 350 550 550 850 1000
ProtezioneStandard IP30 IP30 IP30 IP20 (IP65 opzionale) IP20 (IP65 opzionale) IP20 IP54 (IP65 opzionale) IP54 (IP65 opzionale) IP54 (IP65 opzionale)Camera bianca — — — — (ISO Classe 5 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale) (ISO Classe 3 opzionale)
Controller del robot CR1DA CR750-D/CR750-Q + Q172DRCPU CR750-D/CR750-Q + Q172DRCPU
Pano
ram
ica de
i robo
t
Panoramica dei robot
6
1
Pano
ram
ica de
i robo
t
Panoramica dei robot
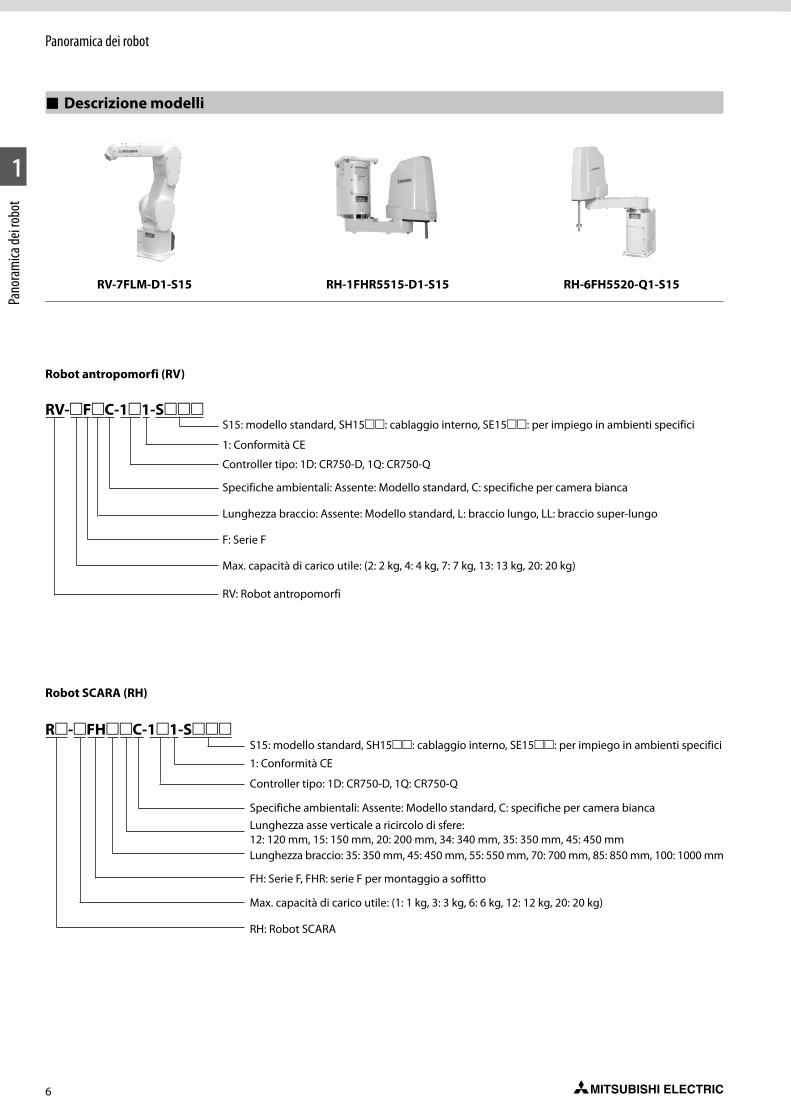
RV-mFmC-1m1-SmmmS15: modello standard, SH15mm: cablaggio interno, SE15mm: per impiego in ambienti specifici
1: Conformità CE
Controller tipo: 1D: CR750-D, 1Q: CR750-Q
Specifiche ambientali: Assente: Modello standard, C: specifiche per camera bianca
Lunghezza braccio: Assente: Modello standard, L: braccio lungo, LL: braccio super-lungo
F: Serie F
Max. capacità di carico utile: (2: 2 kg, 4: 4 kg, 7: 7 kg, 13: 13 kg, 20: 20 kg)
RV: Robot antropomorfi
Rm-mFHmmC-1m1-SmmmS15: modello standard, SH15mm: cablaggio interno, SE15mm: per impiego in ambienti specifici
1: Conformità CE
Controller tipo: 1D: CR750-D, 1Q: CR750-Q
Specifiche ambientali: Assente: Modello standard, C: specifiche per camera biancaLunghezza asse verticale a ricircolo di sfere: 12: 120 mm, 15: 150 mm, 20: 200 mm, 34: 340 mm, 35: 350 mm, 45: 450 mm
FH: Serie F, FHR: serie F per montaggio a soffitto
Max. capacità di carico utile: (1: 1 kg, 3: 3 kg, 6: 6 kg, 12: 12 kg, 20: 20 kg)
RH: Robot SCARA
Lunghezza braccio: 35: 350 mm, 45: 450 mm, 55: 550 mm, 70: 700 mm, 85: 850 mm, 100: 1000 mm
Descrizione modelli
RV-7FLM-D1-S15 RH-1FHR5515-D1-S15 RH-6FH5520-Q1-S15
Robot antropomorfi (RV)
Robot SCARA (RH)

7
1
Funz
ioni s
pecia
li
Funzioni speciali
Coppia Maggiore coppia
Motore di precedente generazione
Velocità (giri/min.)
Motore di nuova generazione
Maggiore velocità
Tempi di ciclo ridotti
Controllo più preciso
Grazie ai potenti servomotori Mitsubishi Electric e alla singolare tecnologia di controllo sviluppata da Mitsubishi Electric, i robot raggiungono le velocità massime nella loro classe.
z Coppie elevate e grandi velocità permettono tempi brevi di accelerazione/frenata
z Minori tempi di posizionamento per maggiore produttività
z Migliore funzionamento in continuo
Cavi e tubi flessibili mon-tati all’interno lungo il braccio del robot fino alla flangia del prenditore
Passaggio dei cavi interno del cablaggio del organo di presa e cavo di segnale
z Cavi e tubi flessibili montati all’interno
z I cavi non possono impigliarsi nelle apparecchiature circostanti
z Minore pericolo di distacco dei cavi
z Disponibilità di modelli opzionali RV con cavi e tubi interni fino alla mano di presa (-SH15mm)
Alla pinza o al prenditore
Elettrovalvole montate all’interno
Agevole montaggio utensili
Flessibilità con attacchi interni del cavo Ethernet
Cablaggio interno predisposto per il collegamento di un sistema di acquisizione immagini.
z Mano di presa: 8 ingressi/8 uscite
z Cavo Ethernet per sistema di acquisizione immagini
z Altre linee di comando di sistemi di acquisizione imma-gini o altri sensori
Sistema acquisizione immagini
Ethernet collegabile sul retro della base

8
Funzioni speciali
1
Funz
ioni s
pecia
li
Maggiori limiti di posizionamento
z Maggiore flessibilità nel layout del sistema robotico
z Utilizzo più efficace dell’area di lavoro per l’intero perimetro.
z Con i minori tratti di corsa si possono ridurre i tempi di ciclo.
Massimo sfruttamento dell’area di lavoro
Prelievo
Posa
Varietà con flessibilità Accesso al lato posteriore nel RV-4F
240°
240°
Il raggio d’azione maggiorato dell’asse J1 consente di accedere meglio al pannello posteriore del robot.
Funzioni GOT di backup/ripristino (supportate da GT14, GT15 e GT16)
Dati di robot su un’unità operativa GOT si possono salvare e ripristinare su/da una scheda di memoria CF/SD o chiavetta USB. Non è richiesto alcun PC per la connessione diretta a Ethernet.
z Nessuna perdita di dati per batterie scariche/difettose o cattivo uso del robot.
z Si possono archiviare dati dopo interventi periodici di manutenzione o in caso di guasto imprevisto. Con ciò migliora notevolmente la manutenibilità.
Ripristino
Back-up
Scheda CF
Migliorata facilità d’uso
Facile servizio in automatico con la teaching box
z Funzioni come sul quadro di comando dell’unità di controllo
z Visualizzazioni a monitor liberamente configurabili per l’esercizio di prova individuale
z Controllo tramite teaching box R32TB e R56TB
Display del controllo (R56TB)
Permette l’inserimento/il disinserimento automatico dei servomotori, l’avvio e l’arresto, il ripristino, la scelta dei programmi e altre funzioni.

9
Funzioni speciali
1
Funz
ioni s
pecia
li
kθ
Correzione
Migliore precisione
Lunghezza utensile
Regolazione tramite 3–8 posizioni apprese
Regolazione facilitata della lunghezza dell’utensile
È possibile impostare i dati degli utensili per il relativo sistema di coordinate dopo aver montato l’utensile con utilizzo di 3–8 posizioni uguali apprese.
z Evita errori grazie alle tolleranze utensile.
z Maggiore precisione.
z Risparmia tempo, perché cade la nuova misurazione dell’utensile.
Correzione di gravità
z Compensa la deviazione del braccio robotico generata dalla forza di gravità.
z Maggiore precisione in palletizzazione
z Maggiore precisione di posizionamento
Correzione di gravità
+X+Y+Z
Prenditore
Mandrino di serraggio
Superficie ortogonale
Sistema di coordinate utensile
Adattamento al servizio
Controllo della compliance
La funzione diminuisce la forza di rigidità del braccio del robot in modo da compensare le forze esterne.
z Non sono necessarie pinze o sensori.
z Ridotti costi utensile
z Ridotti tempi di fermo
Senso d’inserimento o senso normale di movimento

10
Funzioni speciali
1
Funz
ioni s
pecia
li
Funzione anticollisione (solo unità di comando della serie Q)
I robot vengono fermati ancor prima che si abbiano collisioni. Ciò è possibile con il veloce controllo di posizione sulla piattaforma iQ come funzione standard.
z I robot possono lavorare insieme in spazi ridottissimi senza urtarsi
z Cade l’oneroso tempo di lavoro per il ripristino dopo uno scontro.
z Visualizzabile già nella simulazione della RT Toolbox2
Si evitano possibili scontri con altri robot.
Controllo coordinato (solo unità di comando della serie Q)
Permette un controllo coordinato di più robot collegando le CPU tra i robot.
z Facile da comandare con funzione standard predefinita
z Permette di trasferire con piccoli robot pezzi grandi e pesanti
z La programmazione si effettua come noto con comandi standard.
Le posizioni relative della pinza manuale restano invariate tra loro per tutto il processo d’installazione.
11
Funzioni speciali
1
Funz
ioni s
pecia
li
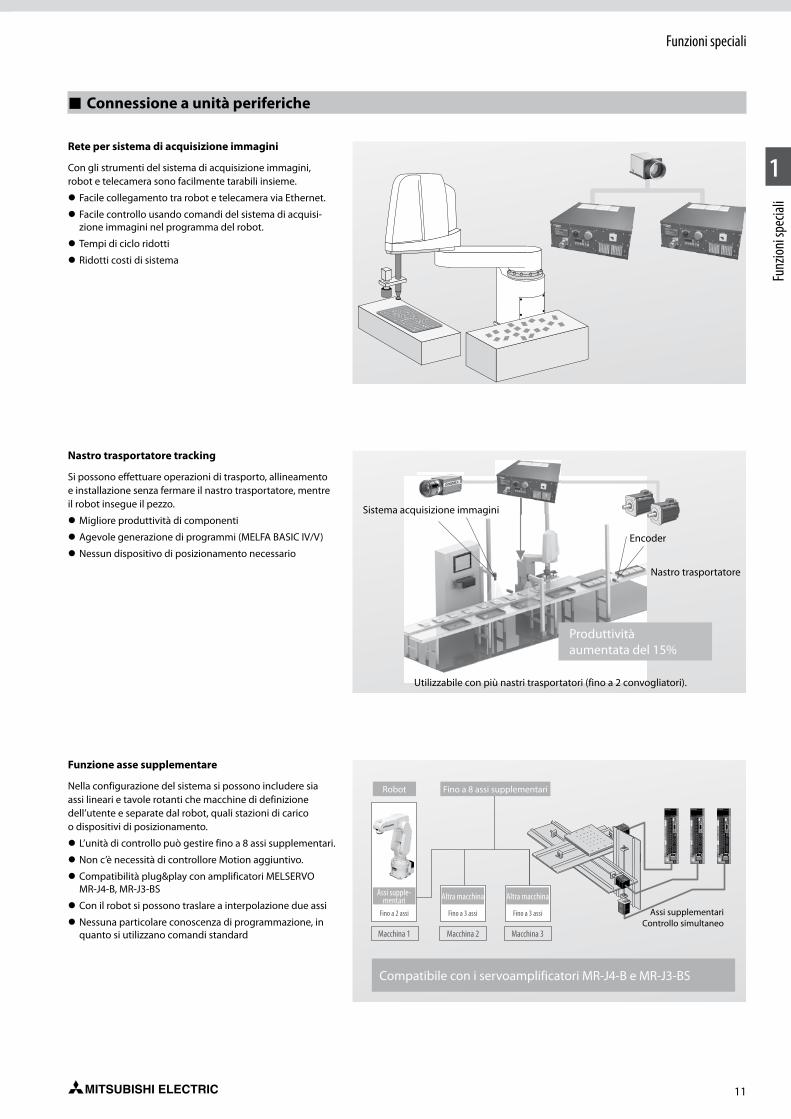
Connessione a unità periferiche
Rete per sistema di acquisizione immagini
Con gli strumenti del sistema di acquisizione immagini, robot e telecamera sono facilmente tarabili insieme.
z Facile collegamento tra robot e telecamera via Ethernet.
z Facile controllo usando comandi del sistema di acquisi-zione immagini nel programma del robot.
z Tempi di ciclo ridotti
z Ridotti costi di sistema
Nastro trasportatore tracking
Si possono effettuare operazioni di trasporto, allineamento e installazione senza fermare il nastro trasportatore, mentre il robot insegue il pezzo.
z Migliore produttività di componenti
z Agevole generazione di programmi (MELFA BASIC IV/V)
z Nessun dispositivo di posizionamento necessario
Funzione asse supplementare
Nella configurazione del sistema si possono includere sia assi lineari e tavole rotanti che macchine di definizione dell’utente e separate dal robot, quali stazioni di carico o dispositivi di posizionamento.
z L’unità di controllo può gestire fino a 8 assi supplementari.
z Non c’è necessità di controllore Motion aggiuntivo.
z Compatibilità plug&play con amplificatori MELSERVO MR-J4-B, MR-J3-BS
z Con il robot si possono traslare a interpolazione due assi
z Nessuna particolare conoscenza di programmazione, in quanto si utilizzano comandi standard
Sistema acquisizione immagini
Encoder
Nastro trasportatore
Utilizzabile con più nastri trasportatori (fino a 2 convogliatori).
Produttività aumentata del 15%
Assi supplementari Controllo simultaneo
Compatibile con i servoamplificatori MR-J4-B e MR-J3-BS
Robot Fino a 8 assi supplementari
Assi supple-mentari Altra macchina Altra macchina
Fino a 2 assi
Macchina 1 Macchina 2 Macchina 3
Fino a 3 assi Fino a 3 assi

12
Funzioni speciali
1
Funz
ioni s
pecia
li
Sicherheitsge-schwindigkeit
Arbeitsberei-chsüberwachung
Caratteristiche MELFA SafePlus
Controllo area circoscritta (delimitazione di un’area di libera definizione)
Funzione che monitora l’area di movimento del robot e garantisce che il robot non superi il limite impostato attivato dal segnale di sicurezza in ingresso. Questa funzione sorveglia quattro punti particolari del braccio robotico. Se uno di loro supera il valore impostato, il robot si fermerà immediatamente.
Monitoraggio coppia (funzione anticollisione)
I limiti di coppia consentiti sono definiti da parametro e la coppia stimata viene calcolata durante il movimento del braccio. Viene monitorata la coppia attuale (valore nominale) e, se quel valore supera i limiti consentiti per la coppia, il robot si arresta subito con il messaggio d’errore STR. La funzione consente di rilevare collisioni tra robot e componenti d’impianto.
Controllo velocità ridotta (velocità di sicurezza limitata)
All’arrivo di un segnale di sicurezza in ingresso, la funzione controlla che la velocità del robot sia inferiore a 250 mm/s. Si possono abilitare due zone diverse con due limiti diversi di velocità. L’operatore può interagire mentre il robot lavora in automatico, ma a bassa velocità di sicurezza.
Tecnologia di sicurezza “MELFA SafePlus“ per i controller di robot della serie F
z Tutte le funzioni soddisfano le norme di sicurezza EN ISO 10218-1 (Robot industriali), EN ISO 13849-1 (Sicurezza macchine), EN62061 / IEC61508 (Sicurezza funzionale) e EN61800-5-2 (Funzione di sicurezza di azionamenti).
Mitsubishi Electric offre ulteriori prodotti con caratteristiche di sicurezza, come PLC modulari e compatti, inverter e servo-amplificatori. Per maggiori informazioni si rimanda all’Automation Book.
Ingressi di sicurezza (a doppio canale)
Funzione di sicurezza in ingresso per attivare tre diverse modalità di sicurezza. Collegamento possibile anche a un PLC di sicurezza, in modo facile e sicuro.
Coppia Off in sicurezza e Arresto sicuro 1
Funzione che spegne il motore e arresta il robot al verificarsi di un errore.
NC
NCNC Y2+ NC Y2- NC Y3+ NC Y3-Y1-NCY1+NCNC Y0-Y0+NC
COM- I/O 24GI/O 24VNC
321Y0
x1x10
SETRESET
B RATESTATION NO.
432
10987
0 123
456
0 123
456
10
6 5 4
237
ELLBT
LINK ID
RD
SD
L ERR.
L RUN
ERR.
SAFETY
RUN
POWER(FG)SLDDB
24G+24VDGDA
QS0J65BTS2-4T
Protezione di operatore e apparecchiature anche in stretta vicinanza al robot
Se l’ope-ratore apre uno sportello...
Apparecchiatura 1 Apparecchiatura 2
Se l’ope-ratore apre uno sportello...
CoppiaSTR
Errore Valore nominale coppia
Coppia stimata
Limiti di coppia
consentiti
Ampi limiti di coppia consentiti
Stretti limiti di coppia
consentiti
Ingressi di sicurezza a doppio
canale
Gruppo I/O remoti di PLC di sicurezza Controller robot
13
Funzioni speciali
1
Funz
ioni s
pecia
li
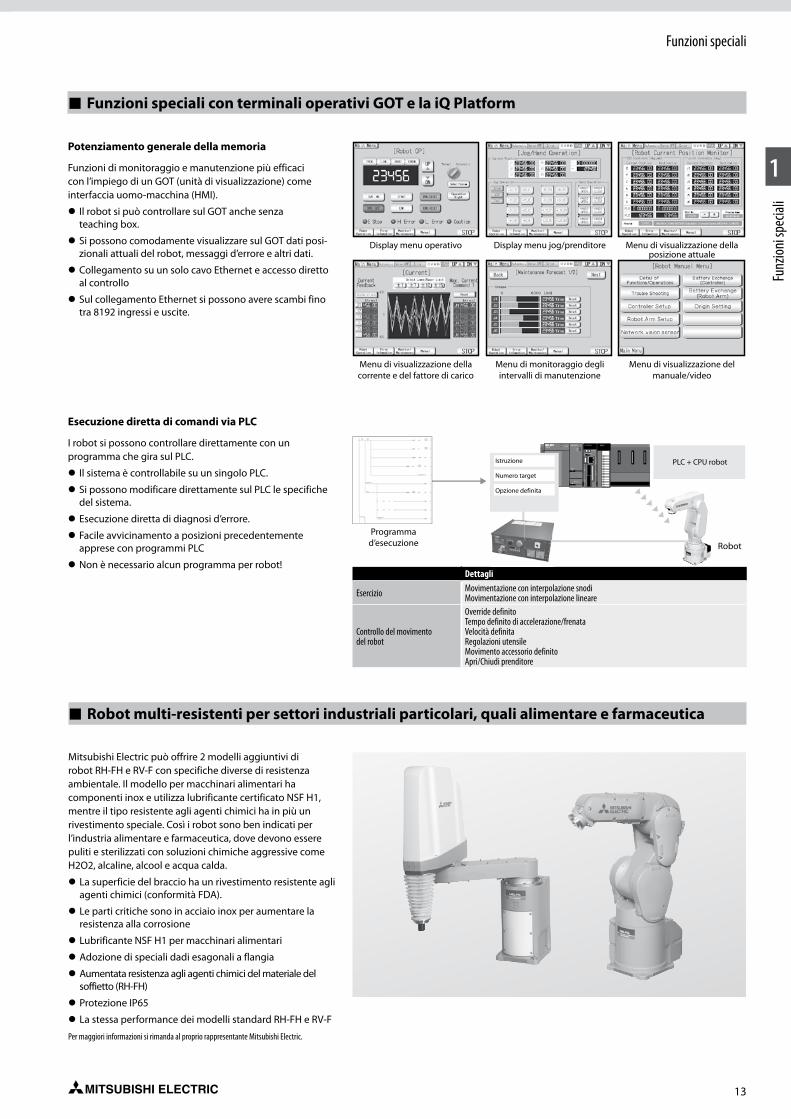
Robot multi-resistenti per settori industriali particolari, quali alimentare e farmaceutica
Mitsubishi Electric può offrire 2 modelli aggiuntivi di robot RH-FH e RV-F con specifiche diverse di resistenza ambientale. Il modello per macchinari alimentari ha componenti inox e utilizza lubrificante certificato NSF H1, mentre il tipo resistente agli agenti chimici ha in più un rivestimento speciale. Così i robot sono ben indicati per l’industria alimentare e farmaceutica, dove devono essere puliti e sterilizzati con soluzioni chimiche aggressive come H2O2, alcaline, alcool e acqua calda.
z La superficie del braccio ha un rivestimento resistente agli agenti chimici (conformità FDA).
z Le parti critiche sono in acciaio inox per aumentare la resistenza alla corrosione
z Lubrificante NSF H1 per macchinari alimentari
z Adozione di speciali dadi esagonali a flangia
z Aumentata resistenza agli agenti chimici del materiale del soffietto (RH-FH)
z Protezione IP65
z La stessa performance dei modelli standard RH-FH e RV-F
Per maggiori informazioni si rimanda al proprio rappresentante Mitsubishi Electric.
Funzioni speciali con terminali operativi GOT e la iQ Platform
Potenziamento generale della memoria
Funzioni di monitoraggio e manutenzione più efficaci con l’impiego di un GOT (unità di visualizzazione) come interfaccia uomo-macchina (HMI).
z Il robot si può controllare sul GOT anche senza teaching box.
z Si possono comodamente visualizzare sul GOT dati posi-zionali attuali del robot, messaggi d’errore e altri dati.
z Collegamento su un solo cavo Ethernet e accesso diretto al controllo
z Sul collegamento Ethernet si possono avere scambi fino tra 8192 ingressi e uscite.
Display menu operativo Display menu jog/prenditore Menu di visualizzazione della posizione attuale
Menu di visualizzazione della corrente e del fattore di carico
Menu di monitoraggio degli intervalli di manutenzione
Menu di visualizzazione del manuale/video
Dettagli
Esercizio Movimentazione con interpolazione snodiMovimentazione con interpolazione lineare
Controllo del movimento del robot
Override definitoTempo definito di accelerazione/frenataVelocità definitaRegolazioni utensileMovimento accessorio definitoApri/Chiudi prenditore
Esecuzione diretta di comandi via PLC
I robot si possono controllare direttamente con un programma che gira sul PLC.
z Il sistema è controllabile su un singolo PLC.
z Si possono modificare direttamente sul PLC le specifiche del sistema.
z Esecuzione diretta di diagnosi d’errore.
z Facile avvicinamento a posizioni precedentemente apprese con programmi PLC
z Non è necessario alcun programma per robot!
Programma d’esecuzione Robot
PLC + CPU robotIstruzione
Numero target
Opzione definita
14
1
Robo
t
Specifiche
RV-2F(B)
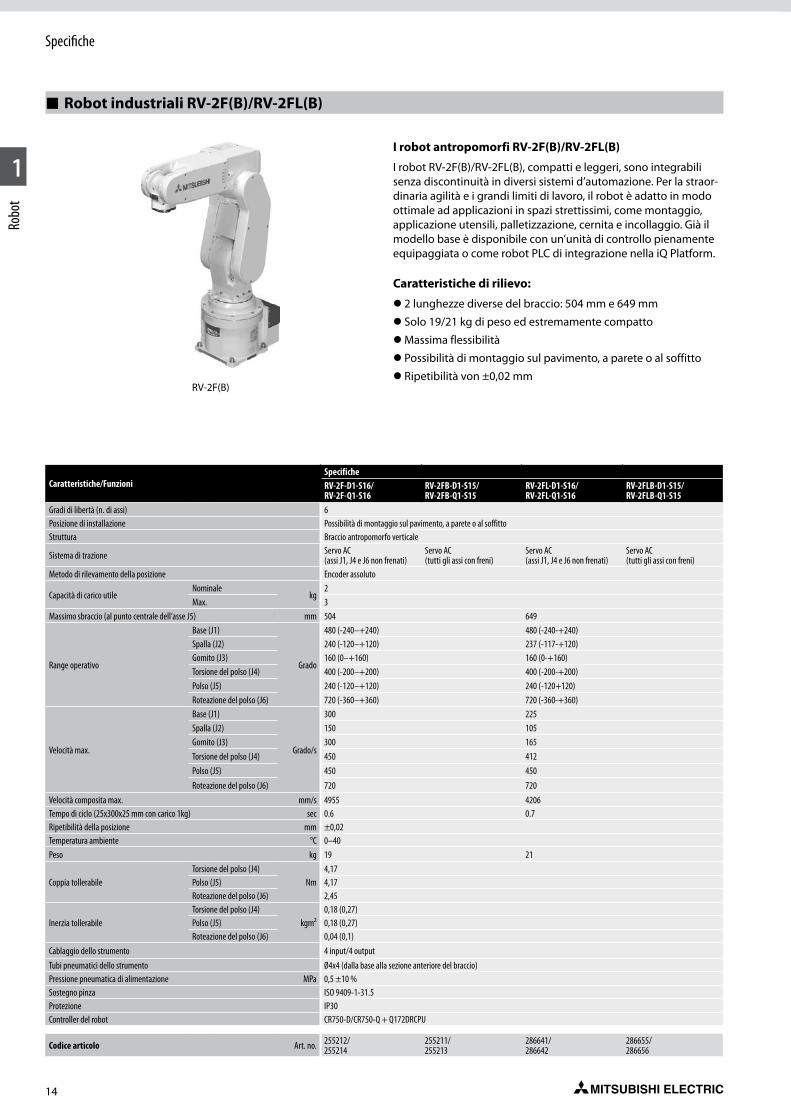
Robot industriali RV-2F(B)/RV-2FL(B)
Caratteristiche/FunzioniSpecificheRV-2F-D1-S16/ RV-2F-Q1-S16
RV-2FB-D1-S15/RV-2FB-Q1-S15
RV-2FL-D1-S16/RV-2FL-Q1-S16
RV-2FLB-D1-S15/RV-2FLB-Q1-S15
Gradi di libertà (n. di assi) 6Posizione di installazione Possibilità di montaggio sul pavimento, a parete o al soffittoStruttura Braccio antropomorfo verticale
Sistema di trazione Servo AC (assi J1, J4 e J6 non frenati)
Servo AC (tutti gli assi con freni)
Servo AC (assi J1, J4 e J6 non frenati)
Servo AC (tutti gli assi con freni)
Metodo di rilevamento della posizione Encoder assoluto
Capacità di carico utileNominale
kg2
Max. 3Massimo sbraccio (al punto centrale dell’asse J5) mm 504 649
Range operativo
Base (J1)
Grado
480 (-240–+240) 480 (-240-+240)Spalla (J2) 240 (-120–+120) 237 (-117-+120)Gomito (J3) 160 (0–+160) 160 (0-+160)Torsione del polso (J4) 400 (-200–+200) 400 (-200-+200)Polso (J5) 240 (-120–+120) 240 (-120+120)Roteazione del polso (J6) 720 (-360–+360) 720 (-360-+360)
Velocità max.
Base (J1)
Grado/s
300 225Spalla (J2) 150 105Gomito (J3) 300 165Torsione del polso (J4) 450 412Polso (J5) 450 450Roteazione del polso (J6) 720 720
Velocità composita max. mm/s 4955 4206Tempo di ciclo (25x300x25 mm con carico 1kg) sec 0.6 0.7Ripetibilità della posizione mm ±0,02Temperatura ambiente °C 0–40Peso kg 19 21
Coppia tollerabileTorsione del polso (J4)
Nm4,17
Polso (J5) 4,17Roteazione del polso (J6) 2,45
Inerzia tollerabileTorsione del polso (J4)
kgm²0,18 (0,27)
Polso (J5) 0,18 (0,27)Roteazione del polso (J6) 0,04 (0,1)
Cablaggio dello strumento 4 input/4 outputTubi pneumatici dello strumento Ø4x4 (dalla base alla sezione anteriore del braccio)Pressione pneumatica di alimentazione MPa 0,5 ±10 %Sostegno pinza ISO 9409-1-31.5Protezione IP30Controller del robot CR750-D/CR750-Q + Q172DRCPU
Codice articolo Art. no. 255212/255214
255211/255213
286641/286642
286655/286656
I robot antropomorfi RV-2F(B)/RV-2FL(B)
I robot RV-2F(B)/RV-2FL(B), compatti e leggeri, sono integrabili senza discontinuità in diversi sistemi d’automazione. Per la straor-dinaria agilità e i grandi limiti di lavoro, il robot è adatto in modo ottimale ad applicazioni in spazi strettissimi, come montaggio, applicazione utensili, palletizzazione, cernita e incollaggio. Già il modello base è disponibile con un’unità di controllo pienamente equipaggiata o come robot PLC di integrazione nella iQ Platform.
Caratteristiche di rilievo:
z 2 lunghezze diverse del braccio: 504 mm e 649 mm
z Solo 19/21 kg di peso ed estremamente compatto
zMassima flessibilità
z Possibilità di montaggio sul pavimento, a parete o al soffitto
z Ripetibilità von ±0,02 mm

15
1
Robo
t
Dimensioni e range di movimento
RV-2F(B)
Dimensioni: mm
Vista x
Vista in pianta
Vista laterale
45°4-M5
5H7
31.5 40h8
20H7
280
+120°
389.
6
-120°
1.7
799.
694
.6
504.6
-120°
70
504.6
504.
6
R504.6
R139.5
+120°
270
221
528
757
270
R230
R230
R250
209
408
A
R139.5
+240°
-240°
R504.6
9
Bracci robot RV-2F(L)(B)
RV-2FL(B)
Dimensioni: mm
Vista x
Vista in pianta
Vista laterale
45°4-M5
5H7
31.5 40h8
20H7
360
+120°
493.
7
-117°
1194
419
9
649
-120°
70
649
649
R649
R162
+120°
335
242
679
906
335
R310
R310
R310
271
521
A
R162
+240°
-240°
R649
9
5031
029
5
Settore di lavoro riferito al punto P
Settore di lavoro riferito al punto P
Settore di lavoro riferito al punto P
Settore di lavoro riferito al punto P

16
Specifiche
1
Robo
t
RV-4FLM
Robot industriali RV-4FLM
I robot antropomorfi RV-4FLM
I robot della serie RV-4F sono stati studiati per essere facilmente integrati in celle di lavoro esistenti o in applicazioni innovative e compatte. Caratteristiche in dotazione, quali ingressi e uscite integrati, ad esempio, consentono un’interazione diretta con sen-sori e attuatori e portano a tempi di ciclo minori e a un semplifi-cato setup del sistema. Una nuova struttura innovativa permette la maggior flessibilità possibile, di modo che il robot possa allargare il suo spazio di lavoro e operare così con maggiore velocità e fles-sibilità.
Caratteristiche di rilievo:
z Struttura dal minimo ingombro
z Protezione IP67
z Cavi e tubi flessibili montati all’interno
zMinori frequenze di manutenzione
z Forza portante nominale e massima di 4 kg
Caratteristiche/FunzioniSpecificheRV-4FLM-D1-S15 RV-4FLM-Q1-S15
Gradi di libertà (n. di assi) 6Posizione di installazione Possibilità di montaggio sul pavimento, a parete o al soffitto (montaggio a parete con limitazioni nell’asse J1)Struttura Braccio antropomorfo verticaleSistema di trazione Servo AC (tutti gli assi con freni)Metodo di rilevamento della posizione Encoder assolutoCapacità di carico utile Max. kg 4Massimo sbraccio (al punto centrale dell’asse J5) mm 649
Range operativo
Base (J1)
Grado
480 (±240)Spalla (J2) 240 (-120–+120)Gomito (J3) 164 (-0–+164)Torsione del polso (J4) 400 (±200)Polso (J5) 240 (-120–+120)Roteazione del polso (J6) 720 (±360)
Velocità max.
Base (J1)
Grado/s
420Spalla (J2) 336Gomito (J3) 250Torsione del polso (J4) 540Polso (J5) 623Roteazione del polso (J6) 720
Velocità composita max. mm/s 9048Tempo di ciclo (25x300x25 mm con carico 1kg) sec 0,36Ripetibilità della posizione mm ±0,02Temperatura ambiente °C 0–40Peso kg 41
Coppia tollerabileTorsione del polso (J4)
Nm6,66
Polso (J5) 6,66Roteazione del polso (J6) 3,96
Inerzia tollerabileTorsione del polso (J4)
kgm²0,20
Polso (J5) 0,20Roteazione del polso (J6) 0,10
Cablaggio dello strumento 8 input/8 outputTubi pneumatici dello strumento Ø6x2 di attacco del robot (Ø4x8 da avambraccio a utensile)Pressione pneumatica di alimentazione MPa 0,54 (di sovrapressione, se necessario)Sostegno pinza ISO 9409-1-31.5Protezione IP67 (versione ambienti controllati opzionale)Controller del robot CR750-D CR750-Q + Q172DRCPU
Codice articolo Art. no. 255268 255272

17
Dimensioni e range di movimento
1
Robo
t
RV-4FL
40h8 P.C.D. 31.5
20H7
45° 5H7
4-M5 R
z25
(200
)102
80 80
102(1
60)
(160)
(200)
8080
128
Rz25
4- 9
+240°
-240°
R140.4
R648.7
+110°(*6)
-35°
(*6)
R140.4
R648.7
490
648.
7
648.7 648.7
140
998.
7
85
125
310
350
50335
-114°(*6)
-120°
+120°
230170
764.
914
.7
Settore di lavoro riferito al punto P
Dimensioni: mm
Settore di lavoro riferito
al punto P
Sostegno pinza ISO 9409-1-31.5
Bracci robot RV-4FLM
Punto P
Punto P
18
Specifiche
1
Robo
t
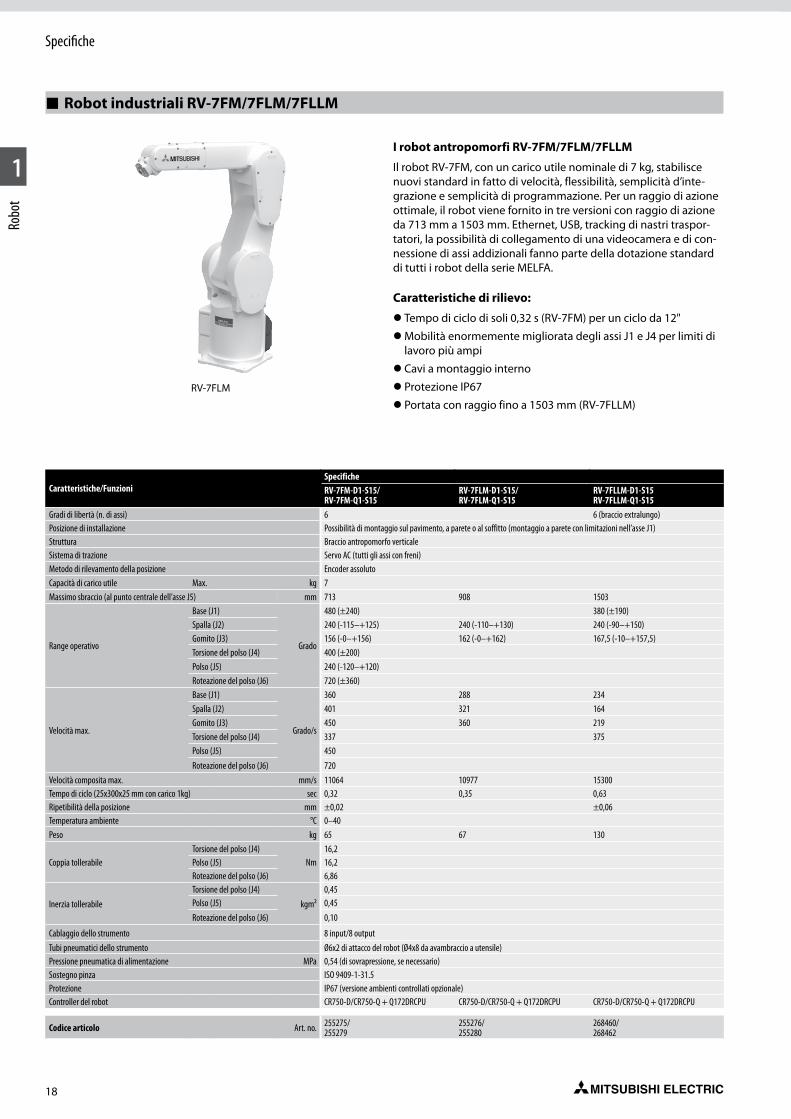
Robot industriali RV-7FM/7FLM/7FLLM
RV-7FLM
I robot antropomorfi RV-7FM/7FLM/7FLLM
Il robot RV-7FM, con un carico utile nominale di 7 kg, stabilisce nuovi standard in fatto di velocità, flessibilità, semplicità d’inte-grazione e semplicità di programmazione. Per un raggio di azione ottimale, il robot viene fornito in tre versioni con raggio di azione da 713 mm a 1503 mm. Ethernet, USB, tracking di nastri traspor-tatori, la possibilità di collegamento di una videocamera e di con-nessione di assi addizionali fanno parte della dotazione standard di tutti i robot della serie MELFA.
Caratteristiche di rilievo:
z Tempo di ciclo di soli 0,32 s (RV-7FM) per un ciclo da 12"
zMobilità enormemente migliorata degli assi J1 e J4 per limiti di lavoro più ampi
z Cavi a montaggio interno
z Protezione IP67
z Portata con raggio fino a 1503 mm (RV-7FLLM)
Caratteristiche/FunzioniSpecificheRV-7FM-D1-S15/ RV-7FM-Q1-S15
RV-7FLM-D1-S15/ RV-7FLM-Q1-S15
RV-7FLLM-D1-S15RV-7FLLM-Q1-S15
Gradi di libertà (n. di assi) 6 6 (braccio extralungo)Posizione di installazione Possibilità di montaggio sul pavimento, a parete o al soffitto (montaggio a parete con limitazioni nell’asse J1)Struttura Braccio antropomorfo verticaleSistema di trazione Servo AC (tutti gli assi con freni)Metodo di rilevamento della posizione Encoder assolutoCapacità di carico utile Max. kg 7Massimo sbraccio (al punto centrale dell’asse J5) mm 713 908 1503
Range operativo
Base (J1)
Grado
480 (±240) 380 (±190)Spalla (J2) 240 (-115–+125) 240 (-110–+130) 240 (-90–+150)Gomito (J3) 156 (-0–+156) 162 (-0–+162) 167,5 (-10–+157,5)Torsione del polso (J4) 400 (±200)Polso (J5) 240 (-120–+120)Roteazione del polso (J6) 720 (±360)
Velocità max.
Base (J1)
Grado/s
360 288 234Spalla (J2) 401 321 164Gomito (J3) 450 360 219Torsione del polso (J4) 337 375Polso (J5) 450Roteazione del polso (J6) 720
Velocità composita max. mm/s 11064 10977 15300Tempo di ciclo (25x300x25 mm con carico 1kg) sec 0,32 0,35 0,63Ripetibilità della posizione mm ±0,02 ±0,06Temperatura ambiente °C 0–40Peso kg 65 67 130
Coppia tollerabileTorsione del polso (J4)
Nm16,2
Polso (J5) 16,2Roteazione del polso (J6) 6,86
Inerzia tollerabileTorsione del polso (J4)
kgm²0,45
Polso (J5) 0,45Roteazione del polso (J6) 0,10
Cablaggio dello strumento 8 input/8 outputTubi pneumatici dello strumento Ø6x2 di attacco del robot (Ø4x8 da avambraccio a utensile)Pressione pneumatica di alimentazione MPa 0,54 (di sovrapressione, se necessario)Sostegno pinza ISO 9409-1-31.5Protezione IP67 (versione ambienti controllati opzionale)Controller del robot CR750-D/CR750-Q + Q172DRCPU CR750-D/CR750-Q + Q172DRCPU CR750-D/CR750-Q + Q172DRCPU
Codice articolo Art. no. 255275/ 255279
255276/ 255280
268460/268462
19
Dimensioni e range di movimento
1
Robo
t
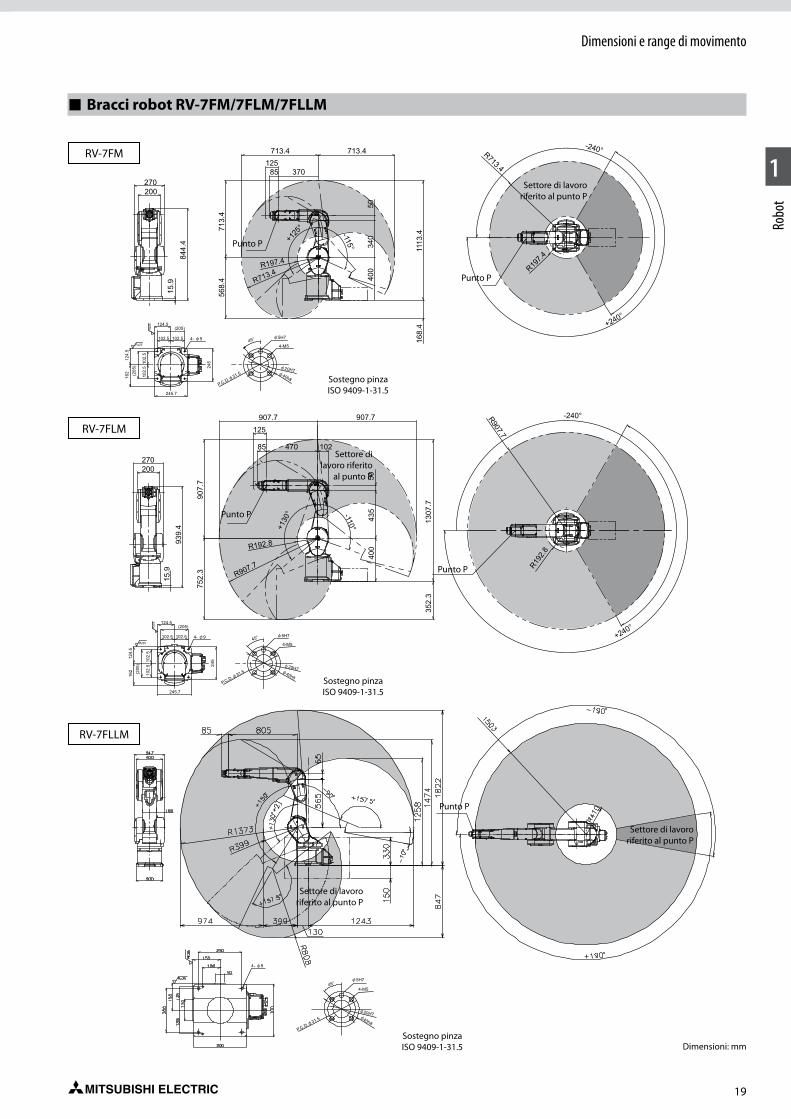
RV-7FM
RV-7FLM
RV-7FLLM
P.C.D. 31.5
45°4-M5
5H7
40h8
20H7
Rz2
5
Rz25
102.
510
2.5
(205
)12
4.5
124.5
102.5 102.5
(205)
245
162
245.7
4- 9
P.C.D. 31.5
45°4-M5
5H7
40h8
20H7
Rz2
5
Rz25
102.
510
2.5
(205
)12
4.5
124.5
102.5 102.5
(205)
245
162
245.7
4- 9
200270
844.
415
.9
+240°
-240°R713.4
R197.4
713.4 713.4
1113
.4
713.
456
8.4
R197.4
R713.4
168.
4
400
340
50
37085125
+125
°
-115°
270200
939.
415
.9
+240°
-240°R907.7
R192.8
752.
3
352.
3
R192.8
R907.7
1307
.7
400
435
50
47085
125
907.
7
907.7 907.7
-110°+130
°
102
P.C.D. 31.5
45°4-M5
5H7
40h8
20H7
4- 9
Settore di lavoro riferito al punto P
Settore di lavoro riferito al punto P
Dimensioni: mm
Settore di lavoro riferito
al punto P
Settore di lavoro riferito al punto P
Sostegno pinzaISO 9409-1-31.5
Sostegno pinzaISO 9409-1-31.5
Sostegno pinzaISO 9409-1-31.5
Bracci robot RV-7FM/7FLM/7FLLM
Punto P
Punto P
Punto P
Punto P
Punto P
20
Specifiche
1
Robo
t
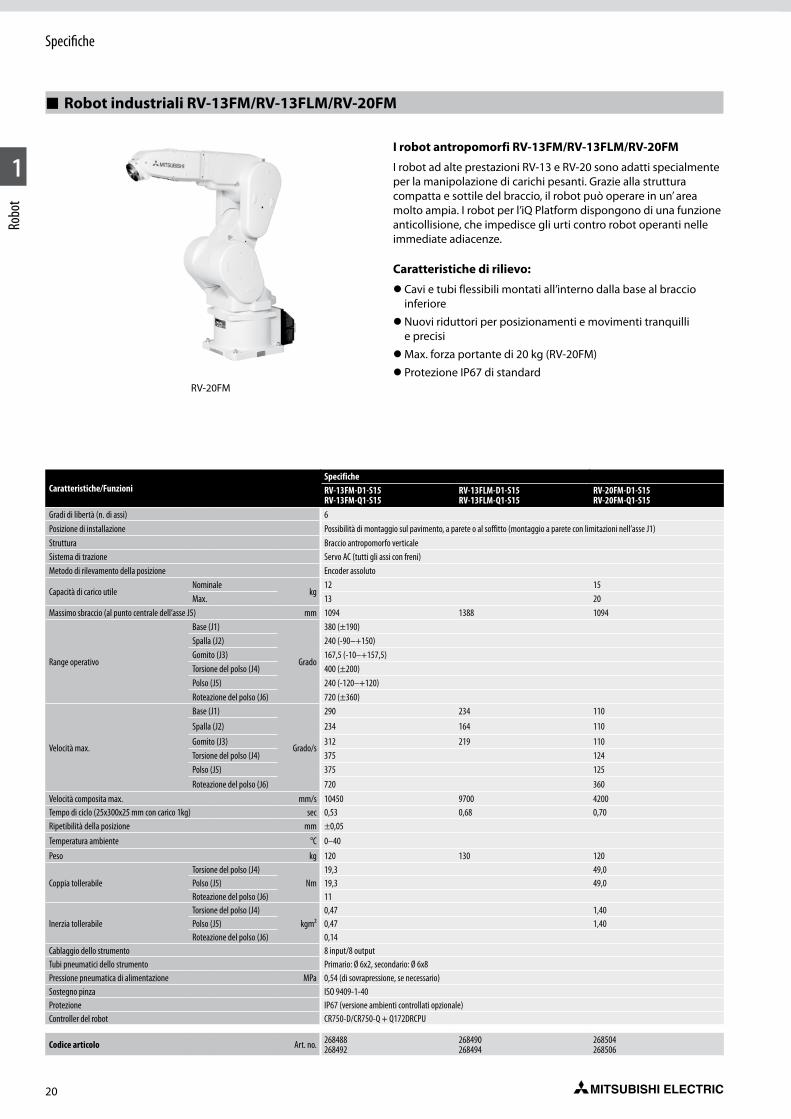
Robot industriali RV-13FM/RV-13FLM/RV-20FM
RV-20FM
I robot antropomorfi RV-13FM/RV-13FLM/RV-20FM
I robot ad alte prestazioni RV-13 e RV-20 sono adatti specialmente per la manipolazione di carichi pesanti. Grazie alla struttura compatta e sottile del braccio, il robot può operare in un’ area molto ampia. I robot per l’iQ Platform dispongono di una funzione anticollisione, che impedisce gli urti contro robot operanti nelle immediate adiacenze.
Caratteristiche di rilievo:
z Cavi e tubi flessibili montati all’interno dalla base al braccio inferiore
z Nuovi riduttori per posizionamenti e movimenti tranquilli e precisi
zMax. forza portante di 20 kg (RV-20FM)
z Protezione IP67 di standard
Caratteristiche/FunzioniSpecificheRV-13FM-D1-S15RV-13FM-Q1-S15
RV-13FLM-D1-S15RV-13FLM-Q1-S15
RV-20FM-D1-S15RV-20FM-Q1-S15
Gradi di libertà (n. di assi) 6Posizione di installazione Possibilità di montaggio sul pavimento, a parete o al soffitto (montaggio a parete con limitazioni nell’asse J1)Struttura Braccio antropomorfo verticaleSistema di trazione Servo AC (tutti gli assi con freni)Metodo di rilevamento della posizione Encoder assoluto
Capacità di carico utileNominale
kg12 15
Max. 13 20Massimo sbraccio (al punto centrale dell’asse J5) mm 1094 1388 1094
Range operativo
Base (J1)
Grado
380 (±190)Spalla (J2) 240 (-90–+150)Gomito (J3) 167,5 (-10–+157,5)Torsione del polso (J4) 400 (±200)Polso (J5) 240 (-120–+120)Roteazione del polso (J6) 720 (±360)
Velocità max.
Base (J1)
Grado/s
290 234 110
Spalla (J2) 234 164 110
Gomito (J3) 312 219 110Torsione del polso (J4) 375 124Polso (J5) 375 125Roteazione del polso (J6) 720 360
Velocità composita max. mm/s 10450 9700 4200Tempo di ciclo (25x300x25 mm con carico 1kg) sec 0,53 0,68 0,70Ripetibilità della posizione mm ±0,05
Temperatura ambiente °C 0–40
Peso kg 120 130 120
Coppia tollerabileTorsione del polso (J4)
Nm19,3 49,0
Polso (J5) 19,3 49,0Roteazione del polso (J6) 11
Inerzia tollerabileTorsione del polso (J4)
kgm²0,47 1,40
Polso (J5) 0,47 1,40Roteazione del polso (J6) 0,14
Cablaggio dello strumento 8 input/8 outputTubi pneumatici dello strumento Primario: Ø 6x2, secondario: Ø 6x8Pressione pneumatica di alimentazione MPa 0,54 (di sovrapressione, se necessario)Sostegno pinza ISO 9409-1-40Protezione IP67 (versione ambienti controllati opzionale)Controller del robot CR750-D/CR750-Q + Q172DRCPU
Codice articolo Art. no. 268488268492
268490268494
268504268506

21
Dimensioni e range di movimento
1
Robo
t
RV-13FM/20FM/13FLM
Dimensioni: mm
Bracci robot RV-13FM/RV-13FLM/RV-20FM
K
J
HG
E
D
A
C
F
B
Serie di robot A B C D E F G H J KRV-13FM/20FM 550 R964 R280 410 R554 1004 1191 1414 R410 R1094RV-13FLM 690 R1258 R328 565 R693 1143 1416 1708 R458 R1388
Dimensioni variabili
Dimensioni: mm
Punto P
Punto P
Limiti di lavoro punto P
(lato meno)
Limiti di lavoro punto P
(lato più)
22
Specifiche
1
Robo
t
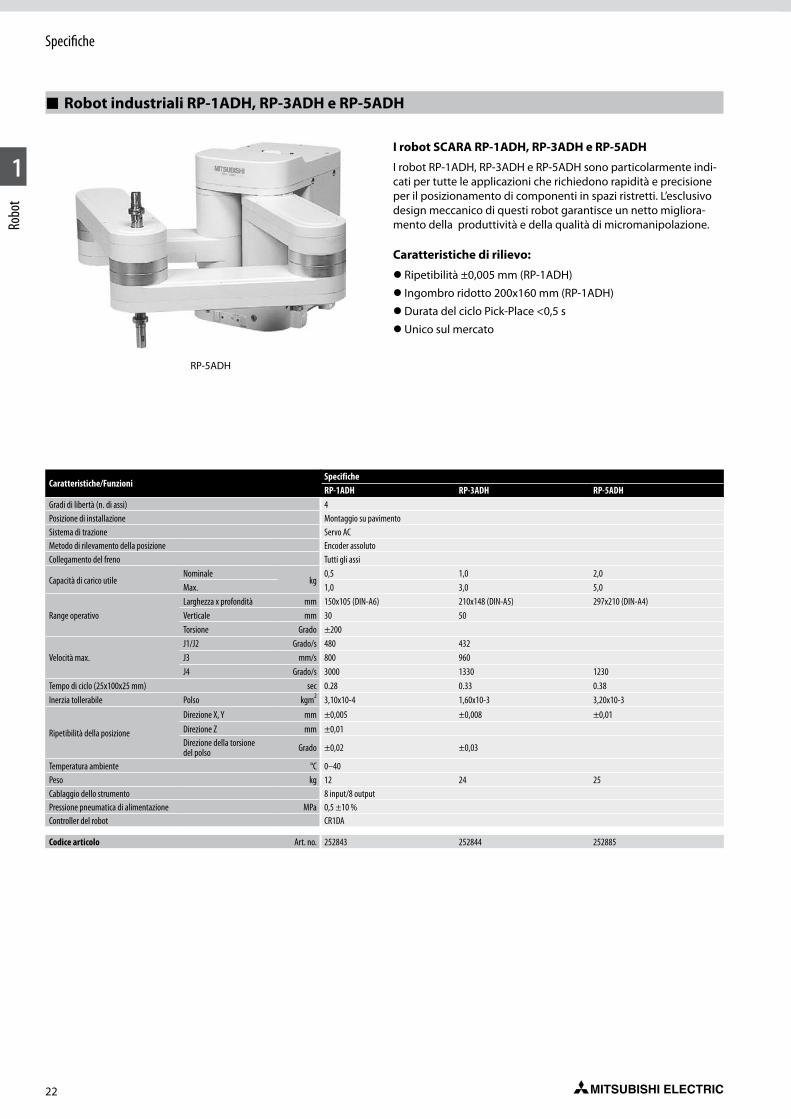
Robot industriali RP-1ADH, RP-3ADH e RP-5ADH
RP-5ADH
I robot SCARA RP-1ADH, RP-3ADH e RP-5ADH
I robot RP-1ADH, RP-3ADH e RP-5ADH sono particolarmente indi-cati per tutte le applicazioni che richiedono rapidità e precisione per il posizionamento di componenti in spazi ristretti. L’esclusivo design meccanico di questi robot garantisce un netto migliora-mento della produttività e della qualità di micromanipolazione.
Caratteristiche di rilievo:
z Ripetibilità ±0,005 mm (RP-1ADH)
z Ingombro ridotto 200x160 mm (RP-1ADH)
zDurata del ciclo Pick-Place <0,5 s
z Unico sul mercato
Caratteristiche/FunzioniSpecificheRP-1ADH RP-3ADH RP-5ADH
Gradi di libertà (n. di assi) 4Posizione di installazione Montaggio su pavimentoSistema di trazione Servo ACMetodo di rilevamento della posizione Encoder assolutoCollegamento del freno Tutti gli assi
Capacità di carico utileNominale
kg0,5 1,0 2,0
Max. 1,0 3,0 5,0
Range operativoLarghezza x profondità mm 150x105 (DIN-A6) 210x148 (DIN-A5) 297x210 (DIN-A4)Verticale mm 30 50Torsione Grado ±200
Velocità max.J1/J2 Grado/s 480 432J3 mm/s 800 960J4 Grado/s 3000 1330 1230
Tempo di ciclo (25x100x25 mm) sec 0.28 0.33 0.38Inerzia tollerabile Polso kgm2 3,10x10-4 1,60x10-3 3,20x10-3
Ripetibilità della posizione
Direzione X, Y mm ±0,005 ±0,008 ±0,01Direzione Z mm ±0,01Direzione della torsione del polso Grado ±0,02 ±0,03
Temperatura ambiente °C 0–40Peso kg 12 24 25Cablaggio dello strumento 8 input/8 outputPressione pneumatica di alimentazione MPa 0,5 ±10 % Controller del robot CR1DA
Codice articolo Art. no. 252843 252844 252885
23
Dimensioni e range di movimento
1
Robo
t
RP-1AH
RP-3AH/RP-5AH
RP-3AH RP-5AH
95
100
R236,5
233,9
100
R140
110°
110°
38
140
105
R140
150
160°
R200
R200
110°R33
5
160°
200
210
105°
50
332
130148 20
3195
177
24
31
2130
A
B
823
0
85180
776
5.5
512
45
ø18
ø8
5,5
5,5
ø6h7
10
M6
A
81ø 81øø8
M5
B
R260
110°
R453,2
260
297
105°
50
450,9
190
170
210
160°
95107
34 1202236 (162)
6
198
61
28
32
56 133
150
162
120
140
180 24,2224,9
155
165
R30,5
R30,5
R30,5
R30,5
24,5
140
5628
(56)
24,5
56
(56)
80
100
76
E
84
R42
28
36
36
D
C(E)
E
D28
(E)
85
120
10012514185
(213)263
82,58
13 1350
180224,9
170
200
216 14
015
516
5
13,5
ø14h7ø15h7
(ø23)
13,5
11
30(38)
12
855,5
A
13,5
13,5
3,5
815
(23)
(12)
ø11ø14h7ø15h7
(ø23)
B
4242
118
103,5
4050
261
267
280
B
A
180
776
Dimensioni: mm
4 fori 9
4 fori 9
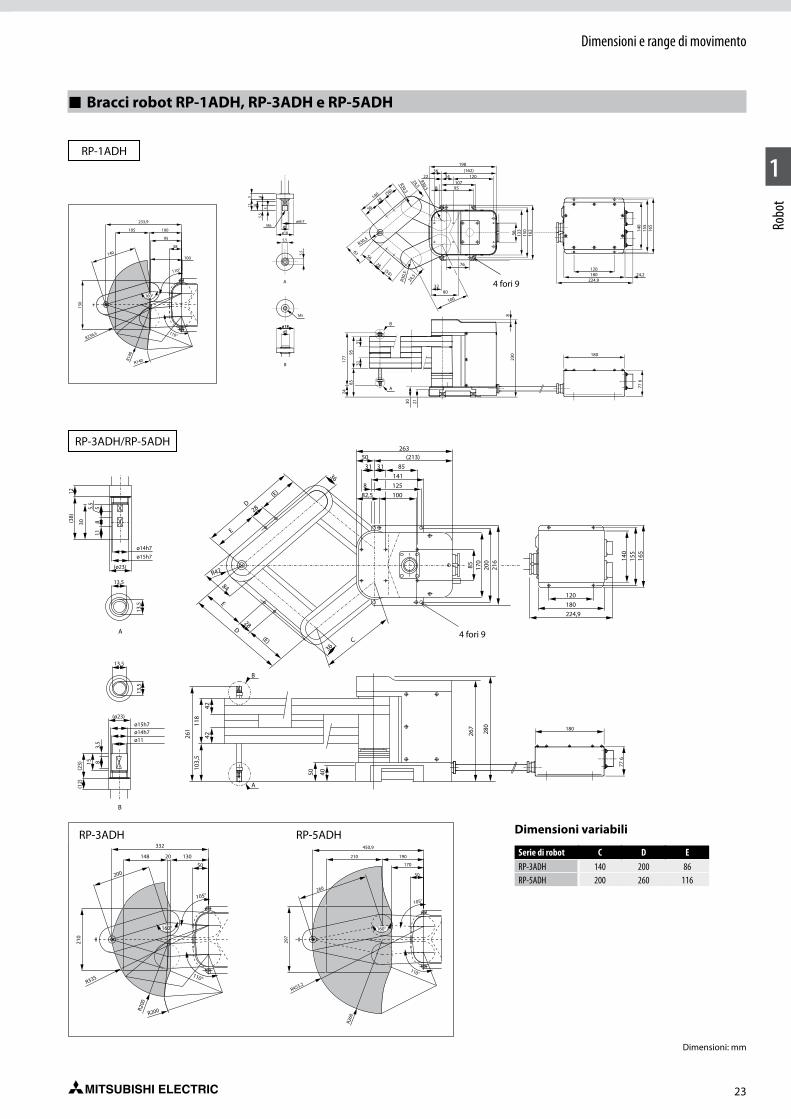
RP-1ADH
RP-3ADH/RP-5ADH
RP-3ADH RP-5ADHSerie di robot C D ERP-3ADH 140 200 86RP-5ADH 200 260 116
Dimensioni variabili
Bracci robot RP-1ADH, RP-3ADH e RP-5ADH

24
Specifiche
1
Robo
t
Robot industriali RH-1FHR
Caratteristiche/FunzioniSpecificheRH-1FHR5515-D1-S60 RH-1FHR5515-Q1-S60
Gradi di libertà (n. di assi) 4 4Posizione di installazione Possibilità di montaggio sul pavimento, a parete o al soffittoStruttura Robot SCARA Sistema di trazione Servo AC Metodo di rilevamento della posizione Encoder assolutoCollegamento del freno Assi J1, J2, J4: senza freno, asse J3: con freno
Capacità di carico utileNominale
kg1
Max. 3Massimo sbraccio mm 550
Range operativo
J1 Grado ±177J2 Grado ±145J3 (Z) mm 150J4 (Θ-asse) Grado ±360
Velocità max.
J1 Grado/s 337,5J2 Grado/s 720J3 (Z) mm/s 765J4 (Θ-asse) Grado/s 3000
Velocità composita max. mm/s 6267 Tempo di ciclo (25x300x25 mm con carico 1kg) sec 0,28
Inerzia tollerabileNominale
kgm2 0,005Max. 0,005
Ripetibilità della posizioneDirezione X, Y mm ±0,012J3 (Z) mm ±0,01J4 (Θ-asse) degree ±0,004
Temperatura ambiente °C 0-40Peso kg 49Cablaggio dello strumento Mano di presa: 8 ingressi/8 uscite, 8 cavi di segnaleTubi pneumatici dello strumento Primario: Ø6x2 (secondario: Ø4x8 opzionale)Pressione pneumatica di alimentazione MPa 5 ±10% per sistema pneumatico sulla pinzaProtezione IP20 (IP65/ISO Class 5 con soffietto aggiuntivo)Controller del robot CR750-D CR750-Q + Q172DRCPU
Codice articolo Art. no. 277708 277709
Robot SCARA per installazioni a soffitto
Con il suo design particolarmente compatto e il supporto per montaggio al di sopra dell’applicazione, il robot RH-1FHR non ruba spazio prezioso nell’area di lavoro vicina al punto di installazione, consentendo dimensioni ancora minori dell‘isola robotizzata.
L‘RH-1FHR5515 è un robot ad alta velocità dedicato a movimentare piccoli pezzi fino a 1 kg.
Caratteristiche di rilievo:
z Robot ad alta velocità e 4 assi per pick&place rapidissimi (tempi di ciclo di soli 0,28 sec).
z Fino a 150 prese/minuto con inseguimento nastro, inclusa apertura/chiusura mano.
zMetodo salva-spazio d’installazione flessibile
z Valvola del vuoto e soffietto opzionali integrati per rigidi requi-siti in applicazioni farmaceutiche e nell’industria di alimentari.
25
Dimensioni e range di movimento
1
Robo
t
Dimensioni: mm
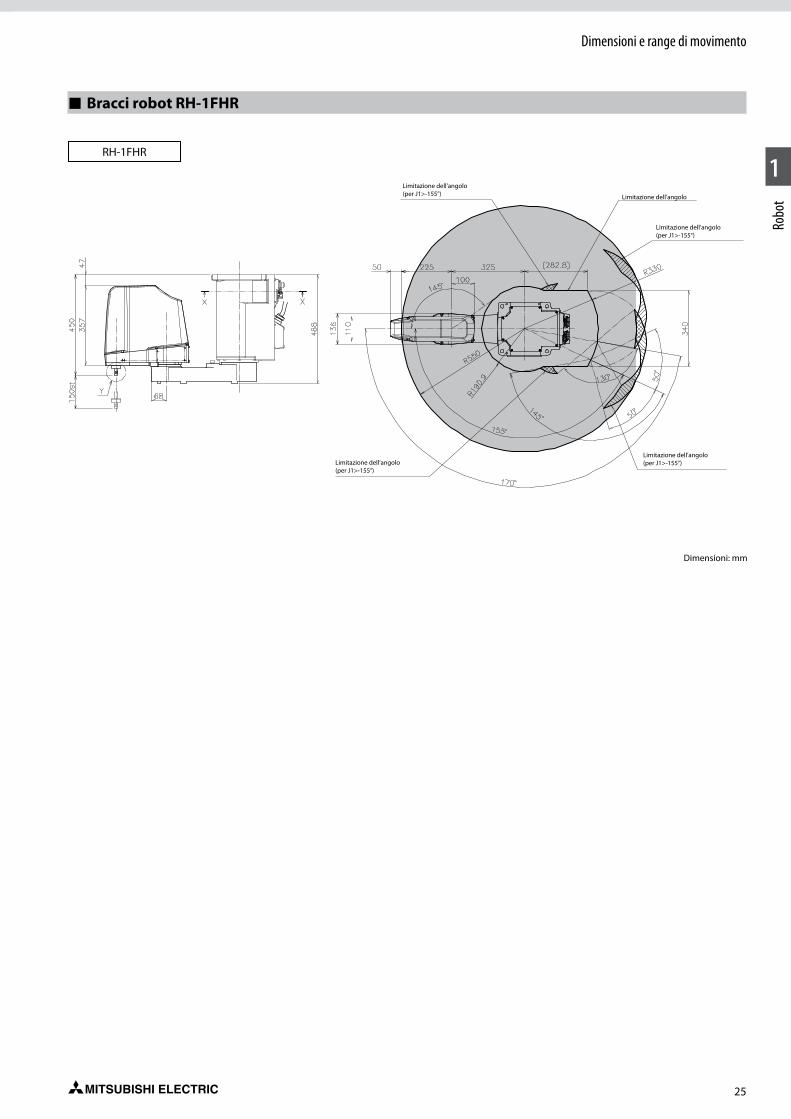
RH-1FHR
Bracci robot RH-1FHR
Limitazione dell’angolo (per J1>-155°)
Limitazione dell’angolo (per J1>-155°)Limitazione dell’angolo
(per J1>-155°)
Limitazione dell’angolo (per J1>-155°)
Limitazione dell’angolo

26
1
Robo
t
Specifications
Robot industriali RH-3FHR
RH-3FHR
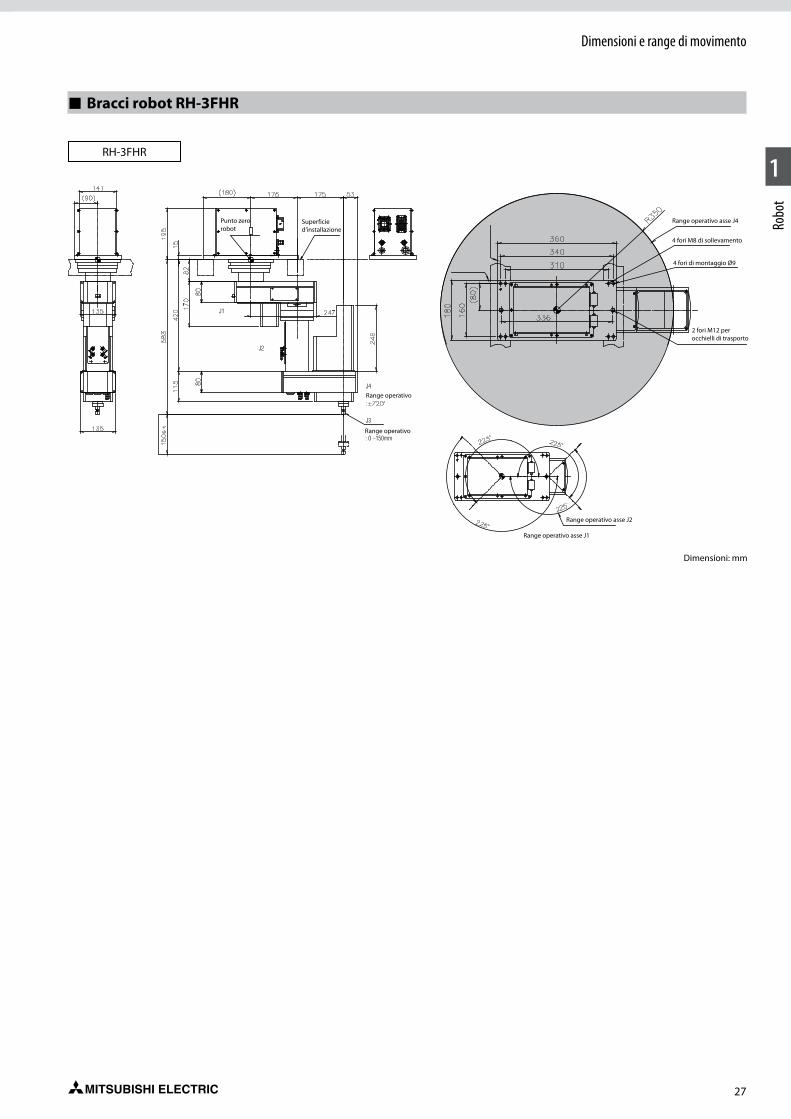
I robot SCARA RH-3FHR
Grazie alla sua speciale forma costruttiva e al montaggio a soffitto sull’applicazione, il robot RH-3FHR non occupa altro spazio di lavoro prezioso accanto al luogo di montaggio, per cui le celle di lavoro possono essere ancora più compatte.
Il suo spazio di lavoro è perfettamente circolare con diametro di 700 mm e 150 mm di altezza. In questo spazio può raggiungere ogni punto con una fedeltà di ripetibilità di ±0,01 mm e questo, se necessario, con un peso massimo di 3 kg.
Caratteristiche di rilievo:
zMinimo ingombro con montaggio sopra testa
z Solo 24 kg di peso
z Tempo di ciclo di soli 0,32 s
z Grande stabilità per la forma compatta
z Cavi e tubi flessibili montati all’interno
Caratteristiche/FunzioniSpecificheRH-3FHR3515-D1-S15 RH-3FHR3515-Q1-S15
Gradi di libertà (n. di assi) 4 4Posizione di installazione Montaggio al soffittoStruttura Robot SCARASistema di trazione Servo ACMetodo di rilevamento della posizione Encoder assolutoCollegamento del freno Assi J1, J2, J4: senza freno, asse J3: con freno
Capacità di carico utileNominale
kg1
Max. 3Massimo sbraccio Braccio 1 + 2 mm 350
Range operativo
J1 Grado 450 (±225)J2 Grado 450 (±225)J3 (Z) mm 150J4 (Θ asse) Grado 1440 (±720)
Velocità max.
J1 Grado/s 672J2 Grado/s 708J3 (Z) mm/s 1500J4 (Θ asse) Grado/s 3146
Velocità composita max. mm/s 6267 (J1, J2)Tempo di ciclo (25x300x25 mm con carico 1kg) sec 0,32
Inerzia tollerabileNominale
kgm2 0,005Max. 0,05
Ripetibilità della posizioneDirezione X, Y mm ±0,01J3 (Z) mm ±0,01J4 (Θ asse) Grado ±0,01
Temperatura ambiente °C 0–40Peso kg 24Cablaggio dello strumento 8 input/8 output (opzione: 8 output)/8 cavi di riservaTubi pneumatici dello strumento Primario: Ø6x2 (secondario: Ø4x8 opzionale)Pressione pneumatica di alimentazione MPa 5 ±10% per sistema pneumatico sulla pinzaProtezione IP20 (IP65 e versione per ambienti controllati opzionali)Controller del robot CR750-D CR750-Q + Q172DRCPU
Codice articolo Art. no. 275483 275484
27
1
Robo
t
Dimensioni e range di movimento
Dimensioni: mm
RH-3FHR
J2
J4
J1
: 0 –150mm
J3
:
Bracci robot RH-3FHR
Punto zero robot
Superficie d’installazione
Range operativo
Range operativo
Range operativo asse J4
4 fori M8 di sollevamento
4 fori di montaggio Ø9
2 fori M12 per occhielli di trasporto
Range operativo asse J2
Range operativo asse J1

28
Specifiche
1
Robo
t
Robot industriali RH-FH
RH-12FH
RH-6FH
I robot SCARA RH-FH
Grazie ai tempi ciclo estremamente ridotti, i robot SCARA sono particolarmente indicati per lavori di manipolazione, palettiz-zazione o assemblaggio di pezzi. I nuovi motori sviluppati da Mitsubishi Electric, i bracci estremamente rigidi e la performante tecnologia di controllo rendono i robot della serie RH-F eccezio-nalmente veloci.
Il tempo ciclo di soli 0,29 s per un ciclo dei 12" assicura la massima produttività e un esercizio continuo ulteriormente potenziato.
Caratteristiche di rilievo:
z Attacchi per pinze pneumatiche, Ethernet, USB, funzioni d’inse-guimento nastro, interfaccia telecamera, I/O manuali, comando assi supplementari e un’interfaccia per unità operative GOT
zMaggiore protezione e sicurezza grazie alla posa tutta interna dei cavi con isolatore passante fino all’estremità del mandrino
z Per RH-6/12/20FH vige la consolidata protezione IP54 per impianti industriali (IP65 opzionale).
z Grasso H1 per uso alimentare - ideale per il settore alimentare.
Caratteristiche/FunzioniSpecificheRH-3FH5515-D1-S15RH-3FH5515-Q1-S15
RH-6FH5520-D1-S15RH-6FH5520-Q1-S15
RH-12FH8535N-D1-S15RH-12FH8535N-Q1-S15
RH-20FH10035N-D1-S15RH-20FH10035N-Q1-S15
Gradi di libertà (n. di assi) 4 4 4 4Posizione di installazione Montaggio su pavimentoStruttura Robot SCARASistema di trazione Servo ACMetodo di rilevamento della posizione Encoder assolutoCollegamento del freno Assi J1, J2, J4: senza freno, asse J3: con freno
Capacità di carico utileNominale
kg1 3 3 5
Max. 3 6 12 20Massimo sbraccio Braccio 1 + 2 mm 550 550 850 1000
Range operativo
J1 Grado 340 (±170)J2 Grado 290 (±145) 306 (±153)J3 (Z) mm 150 200 350 350J4 (Θ-asse) Grado 720 (±360)
Velocità max.
J1 Grado/s 400 400 280 280J2 Grado/s 720 670 450 450J3 (Z) mm/s 1100 2400 2800 2400J4 (Θ-asse) Grado/s 3000 2500 2400 1700
Velocità composita max. mm/s 8300 8300 11350 13283Tempo di ciclo (25x300x25 mm con carico 1kg) sec 0,51 0,29 0,30 0,36
Inerzia tollerabileNominale
kgm2 0,005 0,01 0,025 0,065Max. 0,06 0,12 0,3 1,05
Ripetibilità della posizioneDirezione X, Y mm ±0,012 ±0,012 ±0,015 ±0,015J3 (Z) mm ±0,010J4 (Θ-asse) Grado ±0,004 ±0,005
Temperatura ambiente °C 0–40Peso kg 32 37 69 77Cablaggio dello strumento 8 input/8 output (20 fili in totale)Tubi pneumatici dello strumento Primario: Ø 6x2, secondario: Ø 4x8Pressione pneumatica di alimentazione MPa 5 ±10% per sistema pneumatico sulla pinzaProtezione IP20 IP54 (ottenibile in opzione come IP65 con soffietto aggiuntivo e in versione ambienti controllati)Controller del robot CR750-D/CR750-Q + Q172DRCPU
Codice articolo Art. no. 250377250380
250383250389
254377254383
254388254392

29
1
Robo
t
Dimensioni e range di movimento
150
12090
92
180
150
9260
174
Rz2
5
Rz25
90
4- 9
2- 6
1010
15
15
Z10
30
Z Z
3010 Z
10
11
16h7
37.590
136
110
A60
100
225
174
130
165
145°
D F
BC
E
170°
G2213
.225
MJ
L41
2K
1010
30
(*3)
554
H
1641065
2082
200(*2)160(*1)
X X
(*3)
Y
150
12090
92
180
150
92
60
174
Rz2
5
Rz25
4- 9
2- 6
58
Z
Z
27.5
60.5
Z15
1010
1030
10
24
24Z
1010
Z Z
Z
30
Z
10
90
18
25h7
9039.5
M4
M4
A
H
J
D E
B
C
F
G
Dimensioni: mm
Serie di robot A B C D E F G H JRH-3FH5515 125 R550 R142 210 R253 220 R174 342 150
Dimensioni variabili
RH-3FH
Bracci robot RH-FH
RH-6FH
Serie di robot A B C D E F G H J K L MRH-6FH5520 325 R550 R191 160 R244 172 R197 337 200 133 798 386
Dimensioni variabili
Dimensioni: mm
150
12090
92
180
150
9260
174
Rz2
5
Rz25
90
4- 9
2- 6
1010
15
15
Z10
30
Z Z
3010 Z
10
11
16h7
37.590
136
110
A60
100
225
174
130
165
145°
D F
BC
E
170°
G2213
.225
MJ
L41
2K
1010
30
(*3)
554
H
1641065
2082
200(*2)160(*1)
X X
(*3)
Y
150
12090
92
180
150
92
60
174
Rz2
5
Rz25
4- 9
2- 6
58
Z
Z
27.5
60.5
Z15
1010
1030
10
24
24Z
1010
Z Z
Z
30
Z
10
90
18
25h7
9039.5
M4
M4
A
H
J
D E
B
C
F
G
Fori di posizionamento (per perni di posizionamento Ø8)
Fori di posizionamento (per perni di posizionamento Ø8)
30
1
Robo
t
Dimensioni e range di movimento
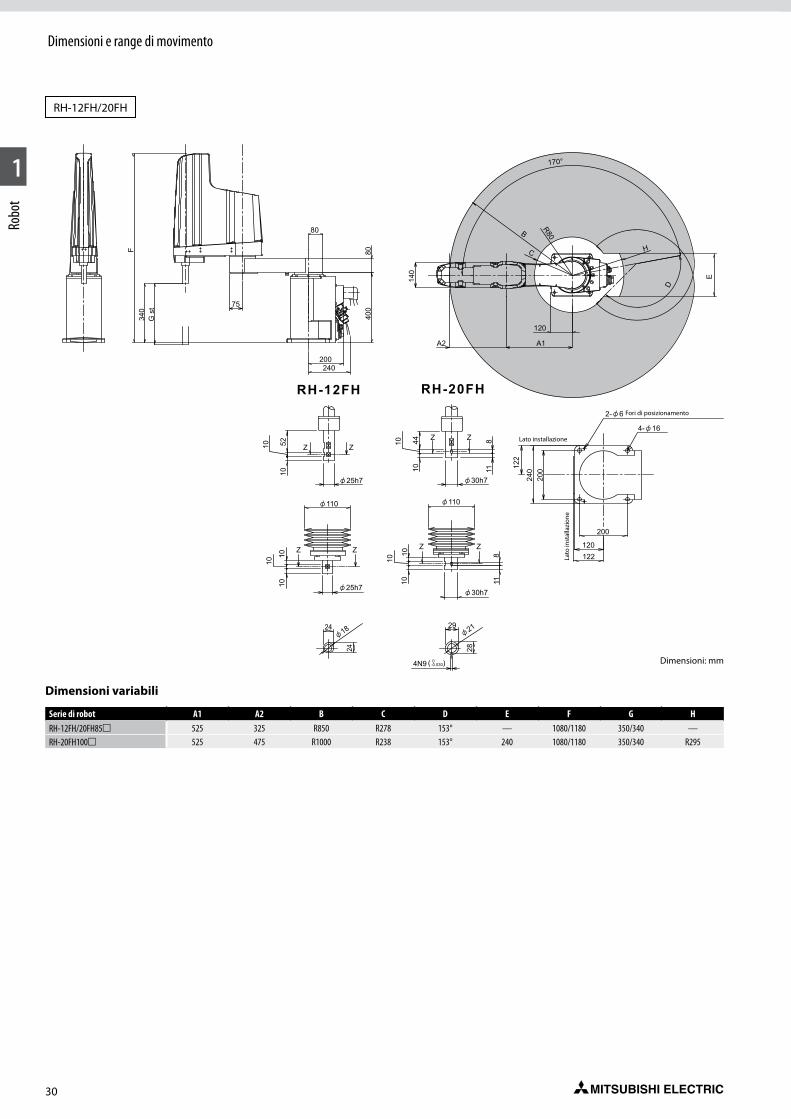
RH-12FH/20FH
136
110
A60
100
225
174
130
165
145°
D F
BC
E
170°
G2213
.225
MJ
L41
2K
1010
30
(*3)
554
H
1641065
2082
200(*2)160(*1)
X X
(*3)
Y
150
12090
92
180
150
92
60
174
Rz2
5
Rz25
4- 9installation hole
2- 6 hole( 8 prepared hole for positioning pins)
58
Z
Z
27.5
60.5
Z15
1010
1030
10
24
24Z
1010
Z Z
Z
30
Z
10
90
18through hole
25h7
9039.5
A1A2
140
120
BR80
C
170°
D
E
H
120122
24012
2
200
200
4- 16
2- 6
F34
0
400
80
80
200240
75
G s
t
28
29
)( -0.030 04N9
10
811
10
10
Z Z
RH-20FH10
811
10 44 Z Z
30h7
110
30h7
21
24
24
1010
10
Z Z
RH-12FH
10
10 52 Z Z
25h7
110
25h7
18
Serie di robot A1 A2 B C D E F G HRH-12FH/20FH85m 525 325 R850 R278 153° — 1080/1180 350/340 —RH-20FH100m 525 475 R1000 R238 153° 240 1080/1180 350/340 R295
Dimensioni variabili
Dimensioni: mm
Lato installazione
Fori di posizionamento
Lato
inst
alla
zion
e
31
1
Robo
t
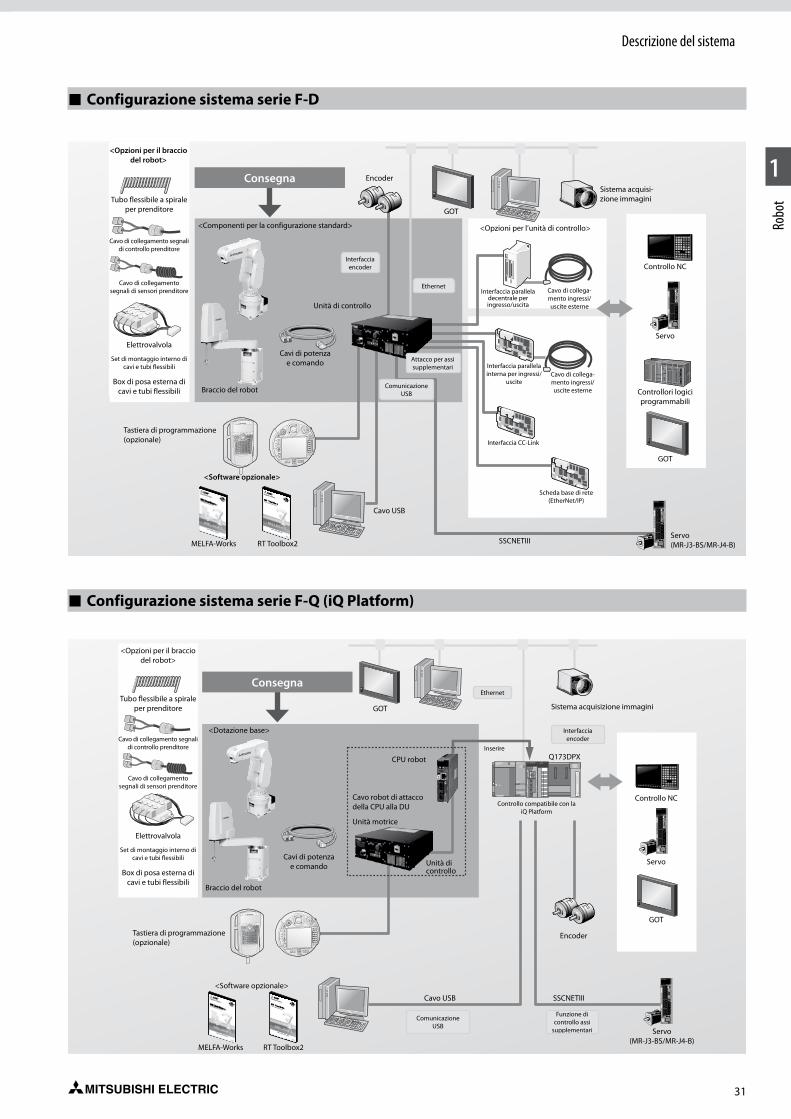
Descrizione del sistema
Configurazione sistema serie F-Q (iQ Platform)
PULL
MITSUBISHI
M EL SECQ6xP POWER Q01CPU
RUNERR
PULL
RS-232
Q41X
RUNSTOP
Q172DRCPU
SW
EMI
DIS
PLA
Y I/
FT U
I/FC
N1
CN
2
Configurazione sistema serie F-D
QY42P
PULL
POWERQ25HCPU
USB
QY42P
PULL
MODERUNERR
USERBAT
BOOT
RS-232
QJ71LP21-25
Tubo flessibile a spirale per prenditore
Cavo di collegamento segnali di controllo prenditore
Cavo di collegamento segnali di sensori prenditore
Elettrovalvola
Set di montaggio interno di cavi e tubi flessibili
Box di posa esterna di cavi e tubi flessibili
<Opzioni per il braccio del robot>
Braccio del robot
<Dotazione base>
Cavi di potenza e comando Unità di
controllo
Unità motrice
Cavo robot di attacco della CPU alla DU
CPU robot
GOT
Ethernet
Sistema acquisizione immagini
Controllo compatibile con la iQ Platform
InserireQ173DPX
Controllo NC
Servo
GOT
Encoder
SSCNETIII
Servo (MR-J3-BS/MR-J4-B)
ComunicazioneUSB
Funzione di controllo assi
supplementari
Interfaccia encoder
Ethernet
Cavo USB
Tastiera di programmazione (opzionale)
MELFA-Works
<Software opzionale>
RT Toolbox2
Consegna
Tubo flessibile a spirale per prenditore
Cavo di collegamento segnali di controllo prenditore
Cavo di collegamento segnali di sensori prenditore
Elettrovalvola
Set di montaggio interno di cavi e tubi flessibili
Box di posa esterna di cavi e tubi flessibili
Encoder
GOT
Sistema acquisi-zione immagini
Controllo NC
Servo
GOT
Controllori logici programmabili
SSCNETIII
Cavo USB
MELFA-Works RT Toolbox2Servo (MR-J3-BS/MR-J4-B)
Interfaccia encoder
Ethernet
Attacco per assi supplementari
ComunicazioneUSBBraccio del robot
<Componenti per la configurazione standard>
Cavi di potenza e comando
Unità di controllo
Tastiera di programmazione (opzionale)
Interfaccia parallela decentrale per ingresso/uscita
Cavo di collega-mento ingressi/uscite esterne
Interfaccia parallela interna per ingressi/
usciteCavo di collega-mento ingressi/uscite esterne
Interfaccia CC-Link
Scheda base di rete (EtherNet/IP)
<Opzioni per l’unità di controllo>
Consegna
<Opzioni per il braccio del robot>
<Software opzionale>

32
1
2
Cont
rolle
r
Controller del robot
Specifiche del controller
Controller CR750-D Unità motrice CR750-Q
Controllori altamente performanti
Ogni sistema robot comprende un control-ler compatto e modulare, completo di CPU ed elettronica di potenza per controllare il robot.
Le unità di controllo Mitsubishi Electric si distinguono per una forma costruttiva particolarmente snella e compatta. Tutti i controlli sono programmati nello stesso linguaggio di programmazione e utilizzano le stesse opzioni, indipendentemente dai robot loro collegati. Indipendentemente dal robot a cui sono collegati, tutti i sistemi di controllo sono programmabili con lo stesso linguaggio e utilizzano le stesse opzioni. È possibile aggiungere schede
opzionali negli appositi Slot di espansione per applicazioni speciali come il collega-mento dei controllori a reti dedicate.
In tutte le unità di controllo sono già implementate di standard funzioni quali la connessione Ethernet o USB, il controllo di assi supplementari su SSCNETIII e un’inter-faccia di collegamento di un encoder per l’inseguimento del nastro trasportatore.
Nel controllo CR750 è inoltre integrata una scheda ingressi e uscite per il colle-gamento di un prenditore pneumatico o elettrico.
Caratteristiche/Funzioni CR750-D CR750-Q CR1DA
Incluso nell’oggetto di fornitura (tipo di robot) RV-2F/2FL/4F/4FL/7F/7FL/7FLL/13F/13FL/20FRH-1FHR/3FHR/3FH/6FH/12FH/20FH RP-1ADH/3ADH/5ADH
CPU robot — Q172DRCPU —Metodo di posizionamento Posizionamento PTP e CPNumero di assi controllabili 6 assi robot + 2 assi di interpolazione + 6 assi indipendentiLinguaggio di programmazione MELFA-BASIC IV/VDeterminazione della posizione Teaching, immissione dati manuale (MDI)
Capacità di memoriaNumero di punti di istruzione 39000 13000 13000 Numero di fasi del programma 78000 26000 26000 Numero di programmi 512 256 256
Input/output esterni
I/O fini generali Fino a 256 opzionali Fino a 8192 della CPU del PLC Fino a 256I/O dedicati Assegnato dall’utente da I/O per fini generali Ingressi/Uscite comuni con CPU multiprocessore Assegnato dall’utente da I/O per fini generali
Apertura/chiusura mano 8 input/8 output 8 input/0 output
I/O arresto d’emergenza 1 (ridondanti)Ingresso con contatto chiudiporta 1 (ridondanti)Ingresso di conferma 1 (ridondanti)Uscita modalità operative 1 (ridondanti)Uscita errori 1 (ridondanti)Uscita per sincronizzazione assi 1 (ridondanti)
InterfacciaEthernet 1 (10BASE-T/100BASE-TX)
USB 1 (versione 2.0, solo di collegamento ai dispositivi, attacco Mini-B)
1 (si può utilizzare l’attacco USB della CPU del controllo logico programmabile)
1 (versione 2.0, solo di collegamento ai dispositivi, attacco Mini-B)
Temperatura ambiente ° C 0–40 0–40 (unità motrice)/ 0–55 (CPU robot) 0–40
Umidità ambiente Umidità relativa % 45–85
AlimentazioneTensione di alimentazione V RV-2F/2FL/4F, RH-1FHR, RH-3FH/6FH: monofase 180–253 V AC
RV-7F, RH-12FH/20FH: trifase 180–253 V AC o monofase 207–253 V ACRP-1/3/5ADH, RH-3SDHR: monofase 180–253 V AC
Potenza assorbita kVA RV-2F/2FL/, RH-3FH: 0.5; RV-4F, RH-6FH: 1.0; RH-1FHR, RH-12FH/20FH: 1.5; RV-7F: 2.0; RV-13F/20F: 3,0 1,0
Dimensioni (LxAxP) inclusi i piedini gommati mm 430x174x425 430x174x425 270x290x200Peso kg 16 16 9Struttura (Protezione) Installazione a pavimento (possibile il montaggio in verticale e in orizzontale) (IP20) + fornibile cassa di protezione IP54 opzionaleMessa a terra Ω 100 o meno (classe di messa a terra D)
CR1DA

33
Controller del robot
1
2
Cont
rolle
r
425
260
85(80)
(70.3)
(40)
(21.7)
158
174
370430
(30) (30)
Dimensioni del controller
CR750-D/CR750-Q
CR1DA
Dimensioni: mm
34
1
2
3
Acce
ssori
Tastiera di programmazione e set di pinze
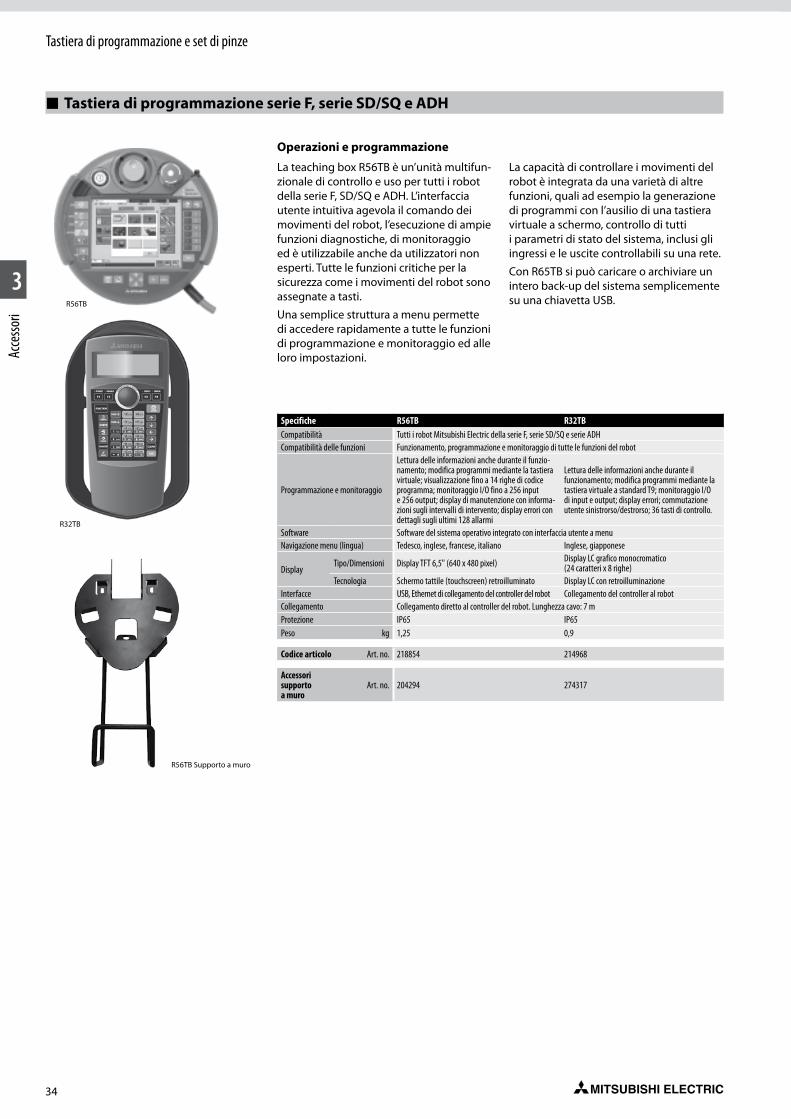
R32TB
R56TB
Tastiera di programmazione serie F, serie SD/SQ e ADH
Specifiche R56TB R32TBCompatibilità Tutti i robot Mitsubishi Electric della serie F, serie SD/SQ e serie ADHCompatibilità delle funzioni Funzionamento, programmazione e monitoraggio di tutte le funzioni del robot
Programmazione e monitoraggio
Lettura delle informazioni anche durante il funzio-namento; modifica programmi mediante la tastiera virtuale; visualizzazione fino a 14 righe di codice programma; monitoraggio I/O fino a 256 input e 256 output; display di manutenzione con informa-zioni sugli intervalli di intervento; display errori con dettagli sugli ultimi 128 allarmi
Lettura delle informazioni anche durante il funzionamento; modifica programmi mediante la tastiera virtuale a standard T9; monitoraggio I/O di input e output; display errori; commutazione utente sinistrorso/destrorso; 36 tasti di controllo.
Software Software del sistema operativo integrato con interfaccia utente a menuNavigazione menu (lingua) Tedesco, inglese, francese, italiano Inglese, giapponese
DisplayTipo/Dimensioni Display TFT 6,5" (640 x 480 pixel) Display LC grafico monocromatico
(24 caratteri x 8 righe)Tecnologia Schermo tattile (touchscreen) retroilluminato Display LC con retroilluminazione
Interfacce USB, Ethernet di collegamento del controller del robot Collegamento del controller al robotCollegamento Collegamento diretto al controller del robot. Lunghezza cavo: 7 mProtezione IP65 IP65Peso kg 1,25 0,9
Codice articolo Art. no. 218854 214968
Accessori supporto a muro
Art. no. 204294 274317
Operazioni e programmazione
La teaching box R56TB è un’unità multifun-zionale di controllo e uso per tutti i robot della serie F, SD/SQ e ADH. L’interfaccia utente intuitiva agevola il comando dei movimenti del robot, l’esecuzione di ampie funzioni diagnostiche, di monitoraggio ed è utilizzabile anche da utilizzatori non esperti. Tutte le funzioni critiche per la sicurezza come i movimenti del robot sono assegnate a tasti.
Una semplice struttura a menu permette di accedere rapidamente a tutte le funzioni di programmazione e monitoraggio ed alle loro impostazioni.
La capacità di controllare i movimenti del robot è integrata da una varietà di altre funzioni, quali ad esempio la generazione di programmi con l’ausilio di una tastiera virtuale a schermo, controllo di tutti i parametri di stato del sistema, inclusi gli ingressi e le uscite controllabili su una rete.
Con R65TB si può caricare o archiviare un intero back-up del sistema semplicemente su una chiavetta USB.
R56TB Supporto a muro
35
1
2
3
Acce
ssori
MELFA SafePlus, Force Sensor
MELFA SafePlus
Sensore di forza
Specifiche Force Sensor Set 4F-FS001-W200Robot RV-F e RH-FController CR750-D/QProgrammazione RT Toolbox2, versione 2.20W o successiva
Il set include:Sensore di forza, unità d’interfaccia per sensore di forza, adattatore di attacco sensore, cavo adattatore per cablaggio interno, alimentatore 24 V DC incluso 1 m di cavo, cavo seriale tra unità e sensore (5 m), cavo SSCNET III (10 m)
Codice articolo Art. no. 256964
Set sensore di forza
Con il sensore di forza si possono control-lare i nostri robot RV-F e RH-F perché rag-giungano valori di reazione preimpostati (maggiore o minore forza) quando il robot viene a contatto con oggetti circostanti.
Caratteristiche di rilievo:
z Funzione di controllo dei robot quando si applica una forza specifica
z Funzione di controllo della rigidità degli snodi del robot
z Funzione per variare le caratteristiche di controllo mentre il robot è al lavoro
z Se le condizioni di trigger sono sod-disfatte, si possono eseguire interrupt (trigger MO), mettendo insieme dati di posizione e di forza.
z Funzione di acquisizione posizione del sensore di forza e del robot al verificarsi del contatto
z Funzione di visualizzazione dati del sen-sore di forza e conservazione dei valori massimi
z Funzione di acquisizione dati del sensore di forza sincronizzata con la posizione.
z I dati sono acquisiti come dati log e visualizzati in forma grafica
z Consente il logging di comandi di start/stop da definirsi in programmi per robot
z Funzione di trasferimento file di log acquisiti al server FTP
Specifiche 4F-SF001-01Robot RV-F e RH-FController CR750-D/QProgrammazione RT Toolbox2, versione 3.30G o successiva
Codice articolo Art. no. 283546
Modulo di sicurezza “MELFA SafePlus“ per controller di robot serie F
Le funzioni principali quali limitazione della velocità, dell’area di lavoro e della coppia sono attivabili su ingressi di sicu-rezza. Di conseguenza, i robot della serie F sono facilmente integrabili in sistemi di sicurezza controllati da PLC.
36
1
2
3
Acce
ssori
Cablaggio
Cablaggio interno ed esterno
Specifiche 1F-HS304S-01 1F-HS408S-01 1F-HS604S-01Bracci robot RH-1FHR/RH-3FH RH-6FH RH-12FH/20FHCorsa mandrino mm — 200 350Lunghezza utile da estremità mandrino mm 300 300 400
Dotazione
4 tubi flessibili per aria (Ø3), 8 cavi sensori (0,2 mm²) 2 cavi di alimentazione elettrica (0,3 mm²)
8 tubi flessibili per aria (Ø4), 8 cavi sensori (0,2 mm²) 2 cavi di alimentazione elettrica (0,3 mm²)
4 tubi flessibili per aria (Ø6) 8 cavi sensori (0,2 mm²) 2 cavi di alimentazione elettrica (0,3 mm²)
Nota
Le due estremità sono libere.Nell’oggetto di fornitura sono inclusi 8 giunti di riduzione (da Ø3 a Ø4).Attacchi HC1 e HC2 ad un’estremità del braccio del robot, l’altra estremità è libera.
Le due estremità sono libere.Attacchi HC1 e HC2 ad un’estremità del braccio del robot, l’altra estremità è libera.
Le due estremità sono libere.Attacchi HC1 e HC2 ad un’estre-mità del braccio del robot, l’altra estremità è libera.
Peso kg 0,4
Codice articolo Art. no. 250468 250469 254396
Box di posa esterna di cavi e tubi flessibiliCon l’ausilio di quest’opzione si possono montare cavi di controllo e sensori pren-ditore e tubi flessibili pneumatici dal pan-nello posteriore del braccio 2 all’esterno della cassa del robot fino al termine del mandrino. Nell’oggetto di fornitura sono inclusi attacchi per il collegamento dei tubi flessibili esterni e staffe di fissaggio.
L’opzione è utilizzabile anche per modelli protetti da spruzzi d’acqua e in versione ambienti controllati. L’oggetto di fornitura del set include una staffa di fissaggio al braccio 2. Il set è utilizzabile con un set di elettrovalvole opzionale.
Specifiche 1F-UT-BOX 1F-UT-BOX-01Bracci robot RH-3FH/6FH RH-12FH/20FH
Dotazione 8 tubi flessibili pneumatici (di collegamento all’elettrovalvola)Viti d’installazione (rondelle)
Peso kg 0,5
Codice articolo Art. no. 251104 254398
Set di montaggio interno di cavi e tubi flessibiliIl set consiste di cavi sensori del prenditore e di tubi flessibili che possono venire mon-tati a partire dal braccio 2, passando per il mandrino fino alla sua estremità.
L’oggetto di fornitura del set include una staffa di fissaggio al braccio 2. Il set di elet-trovalvole è utilizzabile con una elettroval-vola opzionale.
Set di posa cavi esterna su braccio inferiore/Set di posa cavi esterna alla baseCon l’ausilio di queste opzioni si possono condurre i cavi sensori e di comunicazione fuori dal pannello posteriore del braccio inferiore e fuori dal pannello della base.
Utilizzate la combinazione proposta in tabella per portare fuori gli stessi cavi da braccio inferiore e base.
Specifiche 1F-HB01S-01 1F-HA01S-01Bracci robot RV-4FLM/7FM/7FLM/7FLLM/13FM/13FLM/20FMTipo Set di posa cavi esterna su braccio inferiore Set di posa cavi esterna alla baseCavo sensore prenditore 8 —Cavo telecamera del sistema di acquisizione immagini 1 1
Cavi supplementari 4 4
Combinazione consigliata V V
Codice articolo Art. no. 257936 257935
Uscita cavo dal braccio del robot
Braccio inferiore
Base
37
1
2
3
Acce
ssori
Set di valvole
Set di elettrovalvole
Soffietti
SoffiettiAggiungendo il soffietto all’asse Z si ottiene un grado di protezione IP65 per i robot SCARA RH-1FHR, RH-6FH, RH-12FH, e RH-20FH.
Tipo di soffietto Tipo di robot Lunghezza asse Z Art. no.1F-JS-21 RH-1FHR 150 mm 2777141F-JS-01 RH-6FH 200 mm 2514561F-JS-02 RH-6FH 340 mm 251457
1F-JS-05 RH-12FH 350 mm 255689
1F-JS-06 RH-12FH 450 mm 255690
1F-JS-09 RH-20FH 350 mm 2556391F-JS-10 RH-20FH 450 mm 255694
Specifiche1A-VD0mE-RP 1F-VV0mE-01 1E-VD0mE1 2 3 4 1 2 1 2
N. di valvole 1 2 3 4 1 2 1Gamma di applicazioni (tipo di robot) RP-1/3/5ADH RH-1FHR RV-2F(B)/RV-2FL(B)
Funzione della valvola Doppio solenoide Unità sottovuoto Doppio solenoide
Metodo operativo Forma a perno Generatore di sottovuoto a 2 stadi Forma a perno
Superficie sezionale efficace (valore CV) 1,5 mm 1.5 mm 1,5 mm
Range pressione operativa 2–7 bar 3–6 bar 2–7 barPressione max. 10 bar 10 bar 10 barVelocità di reazione <12 ms a 24 V DC <2.5 ms a 24 V DC <12 ms a 24 V DCMax frequenza operativa 5 Hz 5 Hz 5 HzTemperatura ambiente -10–+50 °C -5–+50 °C -10–+50 °CTensione nominale bobina 24 V DC ±10 % 24 V DC ±10 % 24 V DC ±10 %
Codice articolo Art. no. 129780 129781 129792 129793 277712 277713 47397 47398
Specifiche1S-VD0mE-05 1F-VD0mE-01 1S-VD0mE-01 1F-VD0mE-02 1F-VD0mE-034 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
N. di valvole 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4Gamma di applicazioni (tipo di robot) RH-3FHR RH-1FHR, RH-3FH, RH-6FH RH-12/RH-20FH RV-4FL, RV-7F, RV-7FL RV-13F, RV-20F
Funzione della valvola Doppio solenoide Doppio solenoide Doppio solenoide Doppio solenoide Doppio solenoide
Metodo operativo Forma a perno Forma a perno Forma a perno Forma a perno Forma a perno
Superficie sezionale efficace (valore CV) 0,64 mm 0,64 mm 0,64 mm 0,64 mm 0,64 mm
Range pressione operativa 1–7 bar 1–7 bar 1–7 bar 1–7 bar 1–7 barPressione max. 10 bar 10 bar 10 bar 10 bar 10 barVelocità di reazione <22 ms a 5 bar <22 ms a 5 bar <22 ms a 5 bar <22 ms a 5 bar <22 ms a 5 barMax frequenza operativa 5 Hz 5 Hz 5 Hz 5 Hz 5 HzTemperatura ambiente -10–+50 °C -10–+50 °C -10–+50 °C -10–+50 °C -10–+50 °CTensione nominale bobina 24 V DC ±10 % 24 V DC ±10 % 24 V DC ±10 % 24 V DC ±10 % 24 V DC ±10 %
Codice articolo Art. no. 238375 250470 250471 250472 250473 153057 153058 153059 153062 255281 255282 255283 255284 268829 268830 268831 268832
Set di elettrovalvoleQuesta opzione consente di controllare lo strumento della pinza installato sul braccio del robot. Il set di valvole è fornito con tutti i componenti necessari per l’installazione, inclusi collettore ramificato, accoppiamenti e silenziatori.
Le valvole sono dotate di cavi di con-trollo plug-in per un cablaggio semplice e veloce.
I set di valvole solenoidi sono concepiti per l’uso con aria compressa senza olio.

38
1
2
3
Acce
ssori
Schede d’espansione opzionali
Schede interfaccia per controller del robot
2A-RZ371
Specifiche 2D-TZ576Applicazione Interfaccia CC-LinkGamma di applicazioni (tipo di robot) Tutti i robot MELFA eccetto la System QCavo comunicazioni Cavo twisted schermato a 3 filiMax n. di punti I/O e registri dati 126/16Frequenza di aggiornamento 7,2 msMax distanza della trasmissione 100 m a 10 Mbps, 150 m a 5 Mbps, 250 m a 2,5 Mbps, 600 m a 0,62 Mbps, 1500 m a 0,15 Mbps
Codice articolo Art. no. 219063
Specifiche 2D-TZ577Applicazione Interfaccia Profibus DPGamma di applicazioni (tipo di robot) Tutti i robot MELFA eccetto la System QCavo comunicazioni Cavo doppino twistedMax distanza della trasmissione 1200 m a 9,6/19,2/93,75 Kbps, 1000 m a 187,5 Kbps, 400 m a 500 Kbps, 200 m a 1500 KbpsMax n. di parole di comunicazione 122
Codice articolo Art. no. 218861
Interfaccia ProfibusLe schede interfaccia consentono il colle-gamento del controller robot ad una rete Profibus.
Interfaccia I/OGrazie alle schede a innesto 2D-TZ378, il numero di I/O interni può aumentare fino a 64. Per il potenziamento con interfacce
aggiuntive di tipo 2A-RZ371 si può portare fino a 256 il numero di I/O decentrati, secondo l’unità di controllo.
Specifiche 2A-RZ375Applicazione Interfaccia per pinza pneumatica (valvole pneumatiche)Gamma di applicazioni (tipo di robot) Tutti i robot MELFA eccetto la serie FTensione carico nominale Fino a 4 valvole pneumatiche
Codice articolo Art. no. 124657
Interfaccia pinza pneumaticaLa scheda di interfaccia 2A-RZ375 serve per azionare la pinza pneumatica del robot. Controlla i set elettrovalvole (cfr. pag. 32).
Specifiche 2A-RZ371 2D-TZ378Applicazione Interfaccia per input/output addizionali
Tipo Scatola I/O decentralizzata con 32 input e 32 output Scheda con 32 ingressi e 32 uscite
Gamma di applicazioni (tipo di robot) Tutti i robot MELFA eccetto la System QTensione carico nominale Input: 12 V/24 V; output: 12 V/24 V, max. 0,1 A per outputMax num. di scatole I/O utilizzabili 7 2
Codice articolo Art. no. 124658 218862
Interfaccia CC-LinkL’interfaccia 2D-TZ576 consente il colle-gamento dell’unità di controllo CRm-D ad una rete CC-Link.
L’interfaccia CC-Link è una scheda di rete ad alta velocità di bit (per I/O) e words (per registri di dati).
Specifiche 2D-TZ535-PN-SET 2D-TZ535-EIP-SETApplicazione Profinet I/O EtherNet/IPGamma di applicazioni (tipo di robot) Tutti i robot MELFA eccetto la System Q
Cavo comunicazioni Linea Ethernet a trefoli appaiati
Velocità di comunicazione 100 Mbit/sNumero di dati I/O Max. 256 byte in invio e max. 256 byte in ricezione
Codice articolo Art. no. 269546 282409
Interfaccia I/O Profinet / EtherNet/IPLe schede interfaccia consentono il colle-gamento dell’unità di controllo del robot ad una rete Profinet o Ethernet/IP.

39
1
2
3
Acce
ssori
Cavi adattatori e connettori
Cavi segnale per pinza
Specifiche 1A-GR200-RP 1E-GR35S 1F-GR35S-02 1F-GR60S-01 1S-GR35S-02Tipo Cavo output segnale pinza
Gamma di applicazioni (tipo di robot) RP-1/3/5ADH RV-2F(B)/RV-2FL(B)
RV-4FLM, RV-7FM/RV-7FLM/ 7FLLM, RV-13FM/13FLM, RV-20FM
RH-1FHR, RH-3FH/RH-6FH/RH-12FH/RH-20FH RH-3FHR
Design Una sola estremità con connettore
Una sola estremità con connettore
Una sola estremità con connettore
Una sola estremità con connettore
Una sola estremità con connettore
Applicazione Set valvola magnetica personalizzato
Set valvola magnetica personalizzato
Set valvola magnetica personalizzato
Set valvola magnetica personalizzato
Set valvola magnetica personalizzato
Lunghezza mm 2000 350 500 1050 450
Codice articolo Art. no. 129778 47391 255285 250467 166272
Specifiche 1A-HC200-RP 1F-HC35C-01 1F-HC35C-02 1F-HC35S-02 1S-HC00S-01 1S-HC30C-11Tipo Cavo input segnale pinza
Gamma di applicazioni (tipo di robot) RP-1/3/5ADH RH-1FHR, RH-3FH, RH-6FH RH-12FH/RH-20FH
RV-4FL, RV-7F, RV-7FLM/7FLL, RV-13F/13FL, RV-20F
RH-3FHR RV-2F(B)/RV-2FL(B)
Design Una sola estremità con connettore
Una sola estremità con connettore
Una sola estremità con connettore
Una sola estremità con connettore
Una sola estremità con connettore
Una sola estremità con connettore
Applicazione Monitoraggio della condizione della pinza
Monitoraggio della condizione della pinza
Monitoraggio della condizione della pinza
Monitoraggio della condizione della pinza
Monitoraggio della condizione della pinza
Monitoraggio della condizione della pinza
N. di conduttori 10 12 12 10 6 11Lunghezza mm 2000 1650 1800 1000 1210 300
Codice articolo Art. no. 129779 250474 254395 255286 238376 257063
Cavi di collegamentoÈ disponibile una vasta scelta di cavi diversi per la connessione dei segnali di controllo e di stato degli utensili della pinza.
Durante l’uso della pinza pneumatica è necessario monitorare la posizione della pinza. Pertanto in questo caso occorre collegare un cavo di input del segnale della pinza.
Un’estremità del cavo è dotata di spinotto per i segnali del sensore della pinza. L’altra estremità è priva di connettori e può essere installata in base alle esigenze del proprio sistema.
Connettori e cavi di segnale valvole
Specifiche R-SMR-09V-B R-SMR-10V-N OUTPUT pinza serie S INPUT pinza serie S Set di connettori RV-F Set di connettori RH-FH
Tipo Connettore output pinza Connettore output pinza Connettore output segnale pinza
Connettore input segnale pinza
Set di connettori per ingressi e LAN Set di connettori prenditore
Gamma di applicazioni (tipo di robot) RP-1/3/5ADH RP-1/3/5ADH Tutti i robot MELFA tranne
la serie RP-ADH e RV-FTutti i robot MELFA tranne la serie RP-ADH e RV-F Tutti i robot MELFA RV-F Tutti i robot MELFA RH-F
Design Nero, 9 pin Bianco, 10 pin 8 pin 6 pin Set completo Set completoContenuto della confezione alla consegna Spinotto e contatti Spinotto e contatti Spinotto e contatti Spinotto e contatti Spinotto e contatti Spinotto e contatti
Codice articolo Art. no. 132112 132113 164814 164815 268039 273182
Il collegamento con il sistemaPer configurare l’interfaccia ottimale tra il sistema robotizzato e l’applicazione è pos-sibile scegliere dei componenti aggiuntivi.
La vasta scelta di opzioni consente di con-figurare con precisione il robot in base alle esigenze specifiche dell’applicazione.
I connettori elencati nella tabella sot-tostante possono essere utilizzati per realizzare cavi personalizzati per i segnali di input e di output della pinza (vedere anche la tabella sopra).
40
1
2
3
Acce
ssori
Tubi e cavi di prolunga
Tubo flessibile a spirale per organi di presa
Tubi flessibili sostitutivi per la pinzaQuesti tubi spiralati sono concepiti per l’uso con la pinza pneumatica.
Sono indicati anche per l’uso con robot in camere controllate.
Specifiche 1E-ST0404C 1E-ST0408C-300 1N-ST0608C-01 1S-ST0304STipo Tubo spiralatoGamma di applicazioni (tipo di robot) RV-2F(B)/2FL(B), RV-4FL, RV-7F/7FL/7FLL RH-1FHR, RH-3FH/6FH RH-12FH/20FH, RV-13F/20F RH-3FHR
Applicazione Per pinza pneumatica doppia Per prenditori pneumatici quadrupli Per prenditori pneumatici quadrupli Per pinza pneumatica doppiaDimensioni mm 4xØ4 8xØ4 8xØ6 4xØ3
Codice articolo Art. no. 47389 270236 269556 238377
Cavi di prolunga per robot e controller
Specifiche 1S-05CBL-01 1S-10CBL-01 1S-15CBL-01Tipo Cavo di prolunga per installazione fissa in catena di trazioneGamma di applicazioni (tipo di robot) RV-4FL, RV-7F/7FL/7FLL, RV-13F/13FL, RV-20F, RH-3FHR, RH-6FH, RH-12FH, RH-20FH
Raggio di piegamento minimo Più di 100 mmMax velocità di movimento 2000 mm/sGuida calcolo durata residua —Protezione Guaina impermeabile all’olioN. di conduttori cavo di alimentazione 1N. di conduttori cavo segnale 1Lunghezza m 5 10 15
Codice articolo Art. no. 155827 155830 155665
Cavi di prolunga per collegamenti di alimentazione e segnaleI cavi di prolunga per collegamenti di alimentazione e segnale consentono di aumentare la distanza tra il controller e il braccio del robot. Sono disponibili versioni per installazioni flessibili e fisse dei cavi tra il controller e il braccio del robot.
Usare la versione flessibile per l’installa-zione dei cavi in configurazioni a catena di trazione e simili. Questi cavi possono essere utilizzati anche per aumentare la lunghezza dei cavi standard forniti con il robot.
Specifiche 1S-05LCBL-01 1S-10LCBL-01 1S-15LCBL-01 1A-05LCBL-1Tipo Cavo di prolunga per installazione flessibile in catena di trazioneGamma di applicazioni (tipo di robot) RV-4FL, RV-7F/7FL/7FLL, RV-13F/13FL, RV-20F, RH-3FHR, RH-6FH, RH-12FH, RH-20FH Serie RP-ADH
Raggio di piegamento minimo Più di 100 mmRapporto isovolumetrico del sostegno del cavo ≤50 %
Max velocità di movimento 2000 mm/sGuida calcolo durata residua 7,5x106
Protezione Guaina impermeabile all’olioN. di conduttori cavo di alimentazione 2/8 (complessivi 10) Complessivi 10N. di conduttori cavo segnale 5/1/1 (complessivi 7) 6/1 (complessivi 7)Lunghezza m 5 10 15 5
Codice articolo Art. no. 157582 157583 157594 167304

41
1
2
3
Acce
ssori
Cavi di collegamento, cassa di protezione e batterie tampone
Cavi di collegamento per PC e input/output
Specifiche USB-CAB-5M RV-CAB4 2A-CBL05 2A-CBL15 2D-CBL05 2D-CBL15Tipo Cavo USB Cavo di collegamento I/O
ApplicazioneCollegamento USB al PC controller
Collegamento seriale (RS232C) Controller del PC
Cavo I/O per 2A-RZ371
Cavo I/O per 2D-TZ378
Gamma di applicazioni (tipo di robot) Serie F Serie RP-ADH e SD Tutti i robot MELFA eccetto la serie Q
Design Mini USB Spinotto a 9/25 pin Spinotto su un lato
Lunghezza m 5 3 5 15 5 15
Codice articolo Art. no. 221540 55653 47387 59947 218857 218858
Cassa di protezione per l’unità di controllo (IP54)
Specifiche CR750-MBTipo Cassa di protezione per l’unità di controlloApplicazione Controller CR750Dimensioni (LxAxP) mm 525x275x725
Codice articolo Art. no. 251455
Cavi di collegamento, connettoriCon il cavo di collegamento RV-CABm è possibile instaurare una connessione RS232C tra unità di controllo e personal computer, dove il cavo USB-CAB-5M può essere utilizzato per un collegamento USB.
Il cavo di collegamento I/O consente di collegare le periferiche all’interfaccia parallela I/O.
Un’estremità del cavo è dotata di connet-tore per la porta parallela I/O del controller. L’altra estremità è fornita priva di connet-tore, in modo da consentire il collega-mento con i connettori appropriati per le apparecchiature in dotazione.
La cassa di protezione per l’unità di con-trollo CR750 impedisce la penetrazione di nebbia d’olio e altre sostanze dall’am-biente.
Sul lato frontale della cassa si trovano un convertitore di modalità e un connettore di attacco per la teaching box. Nel pannello frontale è incassata una finestra di visualiz-zazione dell’unità di controllo.
Batterie tampone
Specifiche Serie RP-ADH Serie RH-FH- Serie RV-F Art. no.A6BAT Numero 3 — — 4077ER6BAT Numero — 3 3 131168Q6BAT Numero 1 1 1 130376
Set di batterie per la serie RH-F e RV-F costituito da 3 ER6BAT e 1 Q6BAT 271948
BatterieLe batterie tampone sono usate per la fun-zione di backup dei valori encoder e della memoria di programma.
Una batteria e collocate nel controller sotto lo sportellino frontale e fino a cinque bat-terie sono collocate all’interno del Robot.

42
1
2
3
Acce
ssori
Rassegna delle opzioni
Lista completa delle opzioni per tutti i robot
Opzioni Marchio RV-2F(B)/ RV-2FL(B) RV-4FLM
RV-7FM/ RV-7FLM
RV-7FLLM
RV-13FM/RV-13FLM/
RV-20FMRH-3FH RH-6FH RH-12FH/
RH-20FH RH-1FHR RH-3FHR RP- 1/3/5ADH Art. no. Cfr. pag.
Tastiera di programmazione R32TB V V V V V V V V V V 214968 34
Tastiera di programmazione R56TB V V V V V V V V V V 218854 34
Set valvola singola 1A-VD01E-RP V 129780 37
Set valvola doppia 1A-VD02E-RP V 129781 37
Set valvola tripla 1A-VD03E-RP V 129792 37
Set valvola quadrupla1A-VD04E-RP V 129793 37
1S-VD04E-05 V 238375 37
Set valvola singola 1E-VD01E V 47397 37
Set valvola doppia 1E-VD02E V 47398 37
Set valvola singola 1F-VD01E-01 V V V 250470 37
Set valvola doppia 1F-VD02E-01 V V V 250471 37
Set valvola tripla 1F-VD03E-01 V V V 250472 37
Set valvola quadrupla 1F-VD04E-01 V V V 250473 37
Set valvola singola 1F-VD01E-02 V V 255281 37
Set valvola doppia 1F-VD02E-02 V V 255282 37
Set valvola tripla 1F-VD03E-02 V V 255283 37
Set valvola quadrupla 1F-VD04E-02 V V 255284 37
Set valvola singola 1F-VD01E-03 V 268829 37
Set valvola doppia 1F-VD02E-03 V 268830 37
Set valvola quadrupla 1S-VD04E-01 V 153062 37
Unità di sottovuoto singola 1F-VV01E-01 V 277712 37
Unità di sottovuoto doppia 1F-VV02E-01 V 277713 37
Interfaccia CC-Link 1 2D-TZ576 V V V V V V V V V 219063 38
Interfaccia Profibus 1 2D-TZ577 V V V V V V V V V 218861 38
Interfaccia Profinet 2D-TZ535-PN-SET V V V V V V V V V 269546 38
Interfaccia Ethernet/IP 2D-TZ535-EIP-SET V V V V V V V V V V 282409 38
Interfaccia I/O 12D-TZ378 V V V V V V V V V 218862 38
2A-RZ371 V V V V V V V V V 124658 38
Interfaccia pinza pneumatica 2A-RZ375 V V 124657 38
Cavo output segnale pinza
1A-GR200-RP V 129778 39
1E-GR35S V 47391 39
1F-GR35S-02 V V V 255285 39
1F-GR60S-01 V V V V 250467 39
1S-GR35S-02 V 166272 39
Cavo input segnale pinza
1A-HC200-RP V 129779 39
1F-HC35C-01 V V V 250474 39
1F-HC35C-02 V 254395 39
1F-HC35S-02 V V V 255286 39
1S-HC00S-01 V 238376 39
1S-HC30C-11 V 257063 39
Connettore output pinza R-SMR-09V-B V 132112 39
Connettore input pinza R-SMR-10V-N V 132113 39
Connettore output segnale pinza OUTPUT pinza serie S V V V V V V V 164814 39
Connettore input segnale pinza INPUT pinza serie S V V V V V V V 164815 39
Set di connettori
Set di connettori prenditori RH-FH V V V V V 273182 39
Set di connettori RV-4/7F V V 268039 39
Tubo chiusura pinza 1
1E-ST0404C V V V 47389 40
1E-ST0408C-300 V V V 270236 40
1S-ST0304S V 238377 40
1N-ST0608C-01 V V 269556 40
Set di montaggio interno di cavi e tubi flessibili
1F-HS304S-01 V V 250468 36
1F-HS408S-01 V 250469 36
1F-HS408S-02 V 251454 36
1F-HS604S-01 V 254396 36
1F-HS604S-02 V 254397 36

43
1
2
3
Acce
ssori
Rassegna delle opzioni
Lista completa delle opzioni per tutti i robot
Opzioni Marchio RV-2F(B)/ RV-2FL(B) RV-4FLM
RV-7FM/ RV-7FLM
RV-7FLLM
RV-13FM/RV-13FLM/
RV-20FMRH-3FH RH-6FH RH-12FH/
RH-20FH RH-1FHR RH-3FHR RP- 1/3/5ADH Art. no. Cfr. pag.
Box di posa esterna di cavi e tubi flessibili
1F-UT-BOX V V 251104 36
1F-UT-BOX-01 V 254398 36Set di posa cavi esterna su braccio inferiore 1F-HB01S-01 V V V 257936 36
Set di posa cavi esterna alla base 1F-HA01S-01 V V V 257935 36
Cavo di prolunga per installazione fissa in catena di trazione
1S-05CBL-01 V V V V V V 155827 40
1S-10CBL-01 V V V V V V 155830 40
1S-15CBL-01 V V V V V V 155665 40
Cavo di prolunga per instal-lazione flessibile in catena di trazione
1A-05LCBL-1 V 167304 40
1S-05LCBL-01 V V V V V V 157582 40
1S-10LCBL-01 V V V V V V 157583 40
1S-15LCBL-01 V V V V V V 157594 40
Cavo di collegamento al PC RV-CAB4 V 55653 41Cavo di collegamento USB a PC USB-CAB-5M V V V V V V V V V 221540 41
Cavo di collegamento per interfaccia I/O 1
2A-CBL05 V V V V V V V V V V 47387 41
2A-CBL15 V V V V V V V V V V 59947 41
2D-CBL05 V V V V V V V V V V 218857 41
2D-CBL15 V V V V V V V V V V 218858 41Cassa di protezione per l’unità di controllo (IP54) CR750-MB V V V V V V V V 251455 41
Montaggio a parete della teaching box R32TB Montaggio a parete V V V V V V V V V V 274317 34
Supporto a muro R56TB supporto a muro V V V V V V V V V V 204294 34
1 tranne la serie Q

44
1
2
3
4
Lingu
aggio
di pr
ogra
mm
azion
e
MELFA-BASIC IV
MELFA-BASIC IV/V programmazione
Programma campioneIl programma campione sottostante consente di eseguire un’operazione di prelievo-collocazione. Il segnale di input M_IN(8) informa il programma che il materiale trattato si trova in posizione P1. Quando un pezzo è presente, il segnale di input è impostato su 1 e l’operazione di prelievo-collocazione viene eseguita. Il materiale trattato viene prelevato dalla posizione P1 e collocato nella posizione P2.In assenza di materiale trattato, il robotresta in posizione arretrata P_SAFE.
R : Movimento del robotV v : Posizione del movimento
P_SAFE
Prelevare il materiale trattato Collocare il materiale trattato
M_IN(8)
P1 P2
50 m
m
50 m
m
Programma di prelievo-collocazione10 MVS P_SAFE Trasferimento sulla posizione di sicurezza
20 IF M_IN(8) = 0 THEN 20 ELSE 30 Attendere l’impostazione di 8 bit input
30 HOPEN 1 Aprire la pinza 1
40 MVS P1, -50 Trasferire in senso longitudinale su una posizione a 50 mm da P1 rispetto all’utensile
50 MVS P1 Trasferire in posizione P1
60 HCLOSE 1 Chiudere la pinza 1
70 DLY 0.2 Attendere 0,2 s per verificare la corretta chiusura della pinza
80 MVS P1, -50 Trasferire in senso longitudinale su una posizione a 50 mm da P1 rispetto all’utensile
90 MVS P2, -50 Trasferire in senso longitudinale su una posizione a 50 mm da P2 rispetto all’utensile
100 MVS P2 Trasferire in posizione P2
110 HOPEN 1 Aprire la pinza 1 e depositare il materiale trattato
120 DLY 0.2 Attendere 0,2 s per verificare la corretta apertura della pinza
130 MVS P2, -50 Trasferire in senso longitudinale su una posizione a 50 mm da P2 rispetto all’utensile
140 IF M_IN(8) = 1 THEN 40 ELSE 150 In presenza di altro materiale trattato, ripetere l’operazione di prelievo-collocazione
150 MVS P_SAFE In assenza di altro materiale, tornare alla posizione di sicurezza e terminare il programma
160 END Termine del programma
Linguaggio di programmazione MELFA-BASIC IV/V di facile apprendi-mentoI robot Mitsubishi sono controllati attraverso programmi scritti nel potente linguaggio di programmazione MELFA BASIC IV/V. Esso si basa sul BASIC standard, che lo rende estremamente facile da imparare. Oltre alle consuete istruzioni e costrutti stan-dard in BASIC come FOR…NEXT e GOTO, MELFA BASIC IV/V presenta anche alcune estensioni necessarie per i robot, inclusi alcuni tipi di dati supplementari, istruzioni per il movimento e il controllo della pinza
e istruzioni I/O. La familiarità del BASIC standard consente anche ai principianti di acquisire rapidamente dimestichezza con la programmazione dei robot.
Malgrado la semplicità e la breve curva di apprendimento, il MELFA BASIC IV/V è un linguaggio potente che consente di creare programmi molto complessi per i robot.
ProgrammazioneI programmi per robot sono scritti con le istruzioni MELFA BASIC IV/V con l’ausilio di un PC o di una tastiera di programma-zione. Le posizioni sono definite per mezzo
della tastiera di programmazione e il programma effettivo viene scritto sul PC. La creazione del programma avviene con l’ausilio del software di programmazione e progettazione RT Toolbox2.
Sulle pagine seguenti troverete altre infor-mazioni sul software di programmazione.

45
1
2
3
4
5
Softw
are
Software
RT Toolbox2
Il RT Toolbox2 è un software per generare programmi robot e pianificare applicazioni. Dalla messa in esercizio dell’applicazione fino alla ricerca degli errori, simulazione, manutenzione ed esercizio, il software del PC supporta tutte le fasi nella realizzazione di un sistema robotizzato. Ne fanno parte la generazione di programmi come anche l’editing di programmi, il servizio di prova
prima di installare il robot, l’acquisizione dei tempi di ciclo, la ricerca degli errori nella messa in esercizio, il controllo del funzionamento e la ricerca dei guasti.
z Compatibile con Windows® XP, Windows® Vista, Windows® 7, Windows® 8 (a partire da 2.50C) e Windows 10 (a partire da 3.60).
z Supporto di tutti i processi, dalla pro-grammazione fino alla manutenzione, passando per la messa in esercizio
z Ampie funzioni di simulazione
z Potenziate funzioni di manutenzione
Potenziate funzioni di visualizzazione RT Toolbox2
z Rappresentazione visiva di impostazioni di parametri per evitare errori d’impostazione
z Visualizzazione di posizioni di apprendimento e traiettorie di punti terminali
z Configurazione di prenditori e montaggio su braccio del robot
z Importazione di modelli 3D nel programma del robot (formati 3D utilizzati: STL, OBJ)
Collegamento a iQ Works
z Gestione semplificata dei programmi Permette di elaborare a lotti programmi e blocchi di dati da un controllo logico programmabile a un servoamplificatore, un’unità di visualizzazione o un robot.
z Selezione semplificata di dispositivi Tutti i dispositivi Mitsubishi Electric sono elencati nel Navigator e sono selezionabili. Dalla versione 1.24A si possono selezio-nare CPU di robot e la versione viene fornita con il software RT Toolbox2.
Funzioni di editazione programmi e ricerca errori
Generazione di programmi nei linguaggi di programmazione MELFA BASIC IV/V o Movemaster*, migliorato ambiente di lavoro con multifinestre e numerose funzioni di editing. Ciò è di aiuto nella verifica di funzioni come l’esecuzione di passi di programma, l’impostazione di una posizione di tenuta o altre mansioni.* MELFA BASIC è un linguaggio di programmazione che è stato sviluppato per il controllo di robot.
MELFA BASIC IV/V contiene comandi speciali con cui poter programmare facilmente anche procedure più complesse, come l’esecuzione parallela di programmi o rami di programma, che sarebbero di difficile realizzazione in BASIC
Funzioni di simulazione
Movimentare robot offline e rilevare tempi di ciclo di parti di programma.
Visualizzazione 3D
Rappresentazione grafica dell’applicazione con dimensioni, colore e altri dettagli specifici dell’ambiente di lavoro.
Visualizzazione di dati posizionali selezionati
Visualizzazione di traiettorie
MELSOFT Navigator

46
1
2
3
4
5
Softw
are
Software
Funzioni di monitoraggio
Monitoraggio dell’esecuzione del programma, di variabili, segnali in ingresso, ecc.
Funzioni di manutenzione
Le funzioni abbracciano il monitoraggio degli intervalli di manu-tenzione, il ripristino di dati posizionali, la gestione di parametri, ecc.
MELFA-Works
Un programma di simulazione robot in 3D a potente supporto nella pianificazione del sistema e nel primo sviluppo concettuale.
Il tool1 di add-in MELFA-Works per SolidWorks2 permette di simulare su un PC un robot in un sistema di produzione e converte i percorsi del pezzo in dati di posizione del robot. L’integrazione della piattaforma SolidWorks con il MELFA-Works potenzia le funzioni di simulazione e ne aggiunge di nuove.
z Si possono caricare e riordinare dati di parti di apparecchiature esterne.
z Installazione di prenditori via file CAD
zManipolazione di pezzi in lavorazione
z Conversione di dati sorgente 3D in dati d’esercizio
z Teaching offline in ambiente 3D
z Generazione di programmi di robot (modelli) Si possono generare flussi di programma da una combinazione offline di posizioni apprese e funzioni CAD-Link, conver-tendoli quindi in programmi per robot. (formato MELFA BASIC IV/V)
z Simulazione del funzionamento del robot z Visualizzazione della corsa di traslazione nell’applicazione/nella zona di lavoro z Test dei rischi di collisione tra il robot e le unità circostanti z Salvataggio su video di movimenti simulati (formato AVI) z Rilevazione di tempi di ciclo
z Funzioni di ricerca errori nel programma del robot z Esercizio JOG – insegnamento di posi-zioni robot z Installazione di un asse lineare per testare preliminarmente il funziona-mento del sistema robotizzato così allestito.
z Compensazione delle posizioni dalle coordinate CAD con le coordinate del robot.
1 Con un tool di add-in vengono aggiunte funzioni supplementari a un pacchetto software.
2 SolidWorks® è un marchio registrato della SolidWorks Corp. (USA).
Generazione automatica di programmi robot
Si possono generare automaticamente i dati posizionali e il programma del robot, che sono necessari al funzionamento del robot, caricando semplicemente nel MELFA-Works i dati CAD 3D (*3) del pezzo in lavorazione e definendo condizioni e limiti di lavoro.
*3) Formati caricabili in SolidWorks®
• IGES• STEP• ParasolidR• SAT (ACISR)• Pro/ENGINEERR• CGR (CATIARgraphics)• Unigraphics
• PAR (Solid Edge TM)• IPT (Autodesk Inventor)• DWG• DXFTM• STL• VRML• VDA-FS
• Machanical Desktop• CADKEYR• Viewpoint• RealityWave• HOOPS• HCG (Highly compres-
sed graphics)
Nota: Visitate anche il sito web SolidWorks e consultate i documenti più recenti.
Menu d’esempio per MELFA-Works
MELFA-Works SolidWorks®RT-Toolbox2-Mini
Tool di calibratura

47
Indice
IndiceA
Accessori
Batterie tampone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
Cablaggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
Cassa di protezione per l’unità di controllo (IP54) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
Cavi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
MELFA SafePlus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
Schede interfaccia per controller del robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
Sensore di forza. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
Set di elettrovalvole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
Soffietti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
Tastiera di programmazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
Tubo flessibile a spirale per organi di presa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
C
Cablaggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Cavi
Cavi di collegamento per PC e input/output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
Cavi di prolunga per robot e controller. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
Cavi di segnale valvole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
Cavi segnale per pinza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39
Controller del robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
D
Descrizione del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Dimensioni
Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
RH-1FHR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
RH-3FH/6FH/12FH/20FH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
RH-3FHR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
RP-1ADH, RP-3ADH e RP-5ADH. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
RV-2F(L)(B) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
RV-4FLM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
RV-7FM/7FLM/7FLLM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
RV-13FM/RV-13FLM/RV-20FM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
F
Funzioni speciali
Adattamento al servizio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Agevole montaggio utensili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Connessione a unità periferiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
Controllo coordinato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
Funzione anticollisione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
Funzione asse supplementare. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
iQ Platform. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
Massimo sfruttamento dell’area di lavoro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
MELFA SafePlus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
Migliorata facilità d’uso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Migliore precisione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Nastro trasportatore tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
Robot multi-resistenti per settori industriali particolari, quali alimentare e farmaceutica. . . . . . . .13
Tempi di ciclo ridotti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
terminali operativi GOT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
P
Panoramica dei robot
Descrizione modelli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Robot antropomorfi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Robot SCARA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Programmazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
R
Range di movimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
RH-1FHR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
RH-3FH/6FH/12FH/20FH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
RH-3FHR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
RP-1ADH, RP-3ADH e RP-5ADH. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
RV-2F(L)(B) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
RV-4FLM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17
RV-7FM/7FLM/7FLLM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
RV-13FM/RV-13FLM/RV-20FM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
Rassegna delle opzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Robot antropomorfi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
RV-2F(B)/RV-2FL(B) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
RV-4FLM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
RV-7FM/7FLM/7FLLM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
RV-13FM/RV-13FLM/RV-20FM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
Robot SCARA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
RH-1FHR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
RH-3FH/6FH/12FH/20FH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
RH-3FHR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
RP-1ADH, RP-3ADH e RP-5ADH. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
S
Software
MELFA-Works. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
RT Toolbox2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
T
Tastiera di programmazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34

48
Nota

your solution partner
your solution partner
Low voltage: MCCB, MCB, ACB
Medium voltage: VCB, VCC
Power monitoring, energy management
Compact and Modular Controllers
Inverters, Servos and Motors
Visualization: HMIs, Software, MES connectivity
Numerical Control (NC)
Robots: SCARA, Articulated arm
Processing machines: EDM, Lasers, IDS
Air-conditioning, Photovoltaic, EDS
Mitsubishi Electric offre un’ampia gamma di sistemi di automazione, dai PLC e HMI alle macchine CNC
e EDM.
Un nome in cui credereDagli esordi dell’azienda nel 1870, circa 45 aziende utilizzano il nome Mitsubishi in svariati settori, da quello finanziario a quelli del commercio e dell’industria.
Il marchio Mitsubishi è conosciuto in tutto il mondo come sinonimo di qua-lità eccellente.
Mitsubishi Electric Corporation è pre-sente in settori quali la ricerca spaziale, i trasporti, i semiconduttori, i sistemi energetici, le comunicazioni e l’infor-matica, i sistemi audiovisivi, l’elettronica di consumo, la gestione degli edifici e dell’energia e i sistemi di automazione. L’azienda conta 237 tra stabilimenti e laboratori in 121 paesi.
Abbiamo una conoscenza diretta del-le esigenze di affidabilità, efficienza e semplicità d’uso dei sistemi di automa-zione e controllo – per questo potete fidarvi delle soluzioni di automazione Mitsubishi Electric.
In quanto azienda leader a livello mon-diale, con un fatturato globale supe-riore a 4 trilioni di yen (oltre 40 miliardi di dollari) e oltre 110.000 dipendenti, Mitsubishi Electric dispone delle risor-se necessarie e garantisce il proprio impegno a fornire i prodotti migliori e il servizio e l’assistenza più efficienti.
Global Partner. Local Friend.
Filiali Europee
GermaniaMitsubishi Electric Europe B.V.Mitsubishi-Electric-Platz 1D-40882 RatingenTelefono: +49 (0)2102 / 486-0
Czech Rep.Mitsubishi Electric Europe B.V.Radlická 751/113e Avenir Business ParkCZ-158 00 Praha 5Telefono: +420 251 551 470
FranciaMitsubishi Electric Europe B.V.25, Boulevard des BouvetsF-92741 Nanterre CedexTelefono: +33 (0)1 / 55 68 55 68
IrlandaMitsubishi Electric Europe B.V.Westgate Business Park, BallymountIRL-Dublin 24Telefono: +353 (0)1 4198800
ItaliaMitsubishi Electric Europe B.V.Viale Colleoni 7 Palazzo SirioI-20864 Agrate Brianza (MB)Telefono: +39 039 / 60 53 1
OlandaMitsubishi Electric Europe B.V.Nijverheidsweg 23aNL-3641RP MijdrechtTelefono: +31 (0) 297250350
PoloniaMitsubishi Electric Europe B.V.ul. Krakowska 50PL-32-083 BaliceTelefono: +48 (0) 12 347 65 00
RussiaMitsubishi Electric (Russia) LLC52, bld. 1 Kosmodamianskaya emb.RU-115054 MoscowTelefono: +7 495 / 721 2070
SpagnaMitsubishi Electric Europe B.V.Carretera de Rubí 76-80 Apdo. 420E-08190 Sant Cugat del Vallés (Barcelona)Telefono: +34 (0) 93 / 5653131
SveziaMitsubishi Electric Europe B.V. (Scandinavia) Fjelievägen 8SE-22736 LundTelefono: +46 (0) 8 625 10 00
TurchiaMitsubishi Electric Turkey Elektrik Ürünleri A.Ş.Şerifali Mahallesi Nutuk Sokak No:5 TR-34775 Ümraniye-İSTANBUL Telefono: +90 (0)216 / 526 39 90
UKMitsubishi Electric Europe B.V.Travellers LaneUK-Hatfield, Herts. AL10 8XBTelefono: +44 (0)1707 / 28 87 80
UAEMitsubishi Electric Europe B.V.Dubai Silicon OasisUnited Arab Emirates - DubaiTelefono: +971 4 3724716
Rappresentanti Europei
AustriaGEVAWiener Straße 89A-2500 BadenTelefono: +43 (0)2252 / 85 55 20
BelgioESCO DRIVESCulliganlaan 3BE-1831 DiegemTelefono: +32 (0)2 / 717 64 60
BelgioKONING & HARTMAN B.V.Woluwelaan 31BE-1800 VilvoordeTelefono: +32 (0)2 / 257 02 40
BielorussiaOOO TECHNIKONProspect Nezavisimosti 177-9BY-220125 MinskTelefono: +375 (0)17 / 393 1177
Bosnia-ErzegovinaINEA RBT d.o.o.Stegne 11SI-1000 LjubljanaTelefono: +386 (0)1/ 513 8116
BulgariaAKHNATON4, Andrei Ljapchev Blvd., PO Box 21BG-1756 SofiaTelefono: +359 (0)2 / 817 6000
CroaziaINEA CRLosinjska 4 aHR-10000 ZagrebTelefono: +385 (0)1 / 36 940 - 01/ -02/ -03
DanimarcaHANS FØLSGAARD A/STheilgaards Torv 1DK-4600 KøgeTelefono: +45 4320 8600
GreciaUTECO A.B.E.E.5, Mavrogenous Str.GR-18542 PiraeusTelefono: +30 (0)211 / 1206-900
MaltaALFATRADE Ltd.99, Paola HillMalta-Paola PLA 1702Telefono: +356 (0)21 / 697 816
OlandaHIFLEX AUTOM. B.V.Wolweverstraat 22NL-2984 CD RidderkerkTelefono: +31 (0)180 / 46 60 04
OlandaKONING & HARTMAN B.V.Energieweg 1NL-2627 AP DelftTelefono: +31 (0)15 260 99 06
PortogalloFonseca S.A.R. João Francisco do Casal 87/89PT-3801-997 Aveiro, Esgueira Telefono: +351 (0)234 / 303 900
Rep. CecaAutoCont C.S. S.R.O.Kafkova 1853/3CZ-702 00 Ostrava 2Telefono: +420 595 691 150
RomaniaSirius Trading & ServicesAleea Lacul Morii Nr. 3RO-060841 Bucuresti, Sector 6Telefono: +40 (0)21 / 430 40 06
SerbiaINEA SR d.o.o.Ul. Karadjordjeva 12/217SER-11300 SmederevoTelefono: +386 (026) 461 54 01
SlovacchiaSIMAP SKJána Derku 1671SK-911 01 TrenčínTelefono: +421 (0)32 743 04 72
SloveniaINEA RBT d.o.o.Stegne 11SI-1000 LjubljanaTelefono: +386 (0)1 / 513 8116
UcrainaOOO “CSC-AUTOMATION”4-B, M. Raskovoyi St.UA-02660 KievTelefono: +380 (0)44 / 494 33 44
UngheriaMELTRADE Kft.Fertő utca 14.HU-1107 BudapestTelefono: +36 (0)1 / 431-9726
Africa del SudADROIT TECHNOLOGIES20 Waterford Office Park 189 Witkoppen RoadZA-FourwaysTelefono: + 27 (0)11 / 658 8100
IsraeleILAN & GAVISH Ltd.24 Shenkar St., Kiryat ArieIL-49001 Petah-TikvaTelefono: +972 (0)3 / 922 18 24
Mitsubishi Electric Europe B.V.FA - European Business Group Mitsubishi-Electric-Platz 1 D-40882 Ratingen Germany Tel.: +49(0)2102-4860 Fax: +49(0)2102-4861120 [email protected] https://eu3a.mitsubishielectric.com
Art. no. 205290-I Stampato febbraio 2016
Versione controllo
Specifiche soggette a cambiamenti senza preavviso. Tutti i marchi commerciali registrati sono soggetti a copyright.