forze di contattogagliard/ingegneria_industriale...forze sistemi in moto relativo forze apparenti...
TRANSCRIPT

Forze
Sistemi inmotorelativo
Forzeapparenti
Forze di contatto
Le forze di contatto o reazioni vincolari sono forze “efficaci” chedescrivono l’interazione tra corpi estesi (dotati di una superficie!)con un modello fenomenologico. La validita della descrizione elegata a quanto il modello si discosta dalla realta che vieneosservata.
Le forze di contatto agiscono tra due corpi ideali:
indeformabili - durante il contatto non si modifica lageometria del vincolo, cioe della superficie di contatto.impenetrabili - il vincolo impedisce il movimento dei corpinella direzione vincolata, in modo da evitare che occupino lostesso spazio.lisci - non sono presenti altre interazioni tranne quella cheimpedisce il movimento nella direzione vincolata.
Da queste premesse derivano le caratteristiche delle forze vincolaritanto piu valide quanto piu i corpi sono vicini al modello ideale.1 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forze di contatto
La direzione e il verso di una forza di contatto esercitata da uncorpo su un altro corpo e quella della sua superficie nel punto dicontatto, diretta verso l’esterno del corpo.
superficie
piano tangente
vettore normale
Si tratta quindi di forze che corpi indeformabili e lisci esercitanoperpendicolarmente alla propria superficie.
2 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forze di contatto
Il punto di contatto e anche il “punto di applicazione” dellaforza: se i corpi sono a superficie piana esisteun’indeterminazione sul punto di applicazione.
La forza di contatto impedisce il moto perpendicolarmente alvincolo: la sua intensita non e nota se non quando sono note lealtre forze che agiscono sul corpo - non a caso si chiama anche“reazione” vincolare! La impenetrabilita di un corpo“garantisce” che la forza di contatto sia sempre sufficiente a dareuna risultante delle forze perpendicolarmente al vincolo nulla.
mg + N1 = ma = 0
mg −N1 = 0
N1 = mg
3 / 36
Forze
Sistemi inmotorelativo
Forzeapparenti
Forze di contatto
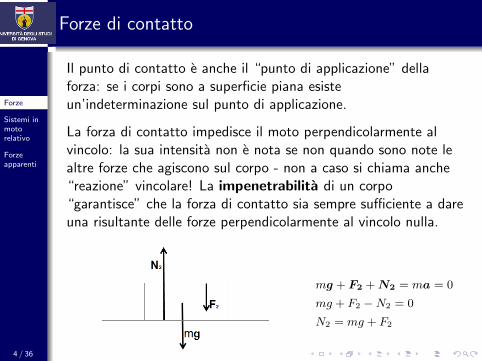
Il punto di contatto e anche il “punto di applicazione” dellaforza: se i corpi sono a superficie piana esisteun’indeterminazione sul punto di applicazione.
La forza di contatto impedisce il moto perpendicolarmente alvincolo: la sua intensita non e nota se non quando sono note lealtre forze che agiscono sul corpo - non a caso si chiama anche“reazione” vincolare! La impenetrabilita di un corpo“garantisce” che la forza di contatto sia sempre sufficiente a dareuna risultante delle forze perpendicolarmente al vincolo nulla.
mg + F2 + N2 = ma = 0
mg + F2 −N2 = 0
N2 = mg + F2
4 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forze di contatto
Il punto di contatto e anche il “punto di applicazione” dellaforza: se i corpi sono a superficie piana esisteun’indeterminazione sul punto di applicazione.
La forza di contatto impedisce il moto perpendicolarmente alvincolo: la sua intensita non e nota se non quando sono note lealtre forze che agiscono sul corpo - non a caso si chiama anche“reazione” vincolare! La impenetrabilita di un corpo“garantisce” che la forza di contatto sia sempre sufficiente a dareuna risultante delle forze perpendicolarmente al vincolo nulla.
mg + F2 + N2 = ma
mg + F2 cos(π/4)−N2 = 0
N2 = mg + F2 cos(π/4)
F2 sin(π/4) = ma
5 / 36
Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito
Le forze di attrito sono forze di contatto tra due corpi(eventualmente tra un corpo e un mezzo) che in generale sioppongono al moto.
Come nel caso delle reazioni vincolari sono forze per le quali sonostati sviluppati modelli fenomenologici che ne descrivonoapprossimativamente le caratteristiche.
Per le forze di attrito che derivano dal contatto tra le superfici didue corpi parliamo di attrito statico e attrito dinamico
Per le forze di attrito che derivano dall’interazione tra un corpo eil fluido nel quale il corpo e immerso e nel quale e in movimentoparliamo di attrito viscoso
6 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito statico
L’attrito statico e un fenomeno che si verifica quando due corpihanno una superficie (piana, approssimativamente piana,possibilmente non puntiforme!) a contatto e non sono inmovimento l’uno rispetto all’altro (“statico”)
La forza di attrito statico puo essere vista come una forza cheimpedisce il moto di un corpo rispetto all’altro.
La forza di attrito statico e diretta in direzione perpendicolare alversore normale alla superficie dell’altro corpo (“lungo” lasuperficie).
Il verso della forza di attrito statico e quello che permette allaforza di bilanciare le altre forze agenti sul corpo sul quale agiscein modo da avere una risultante nulla lungo la superficie.
7 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito statico
L’intensita e quella sufficiente ad avere una risultante nulla delleforze lungo la superficie
Esiste una intensita massima oltre la quale la forza di attritostatico non e piu in grado di impedire il movimento.
Sperimentalmente si osserva che l’intensita massima dellaforza di attrito tra due corpi dipende linearmente dalla forza dicontatto tra i due corpi e attraverso una costante dal materiale dicui sono composti i corpi. In formule FAmax = µsN
Valori del coefficiente di at-
trito statico per alcune super-
fici. Notare che il valore del co-
efficiente puo essere maggiore
di 1.
8 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito statico
N1 + mg = 0
9 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito statico
N2 + mg 6= 0
10 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito statico
N2 + mg + FA = 0
11 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito statico
N2 + mg + FA = 0
12 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito statico
N2 + mg + FA = 0
N2 −mg cos(θ0) = 0
FA = mg sin(θ0)
13 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito statico
N2 + mg + FA = 0
N2 −mg cos(θ0) = 0
FA = mg sin(θ0)
FAmax = µsN2 = µsmg cos(θ0)
FA < FAmax → µs > tan(θ0)
14 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito statico
N2 + mg + FA = 0
N2 −mg cos(θ0) = 0
FA = mg sin(θ0)
FAmax = µsN2 = µsmg cos(θ0)
FA > FAmax → θ0 > arctan(µs)
15 / 36
Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito dinamico
L’attrito dinamico e un fenomeno che si verifica quando due corpihanno una superficie (piana, approssimativamente piana,possibilmente non puntiforme!) a contatto e sono in movimentol’uno rispetto all’altro (“dinamico”).
Sperimentalmente si osserva che l’intensita della forza di attritodinamico tra due corpi dipende linearmente dalla forza dicontatto tra i due corpi e attraverso una costante dal materiale dicui sono composti i corpi. In formule FAdyn
= µdN . Ilcoefficiente di attrito dinamico tra due superfici non puo esseremaggiore del coefficiente di attrito statico - altrimenti il corponon si metterebbe in movimento...
All’interno del suo campo di validita l’espressione per l’attritodinamico mostra come la forza non sia dipendente dalla velocitadei corpi
16 / 36
Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito viscoso
L’attrito viscoso e un fenomeno cui va incontro un corpo inmovimento all’interno di un fluido.
A differenza dell’attrito tra due superfici, la forza di attritoviscoso cresce al crescere della velocita del corpo nel fluido, etende a zero quando la velocita diventa nulla.
La dipendenza funzionale dalla velocita dipende dal “regime” delmoto nel fluido, nonche dalla forma e dimensioni del corpo, edalla “viscosita” del fluido. Per uno stesso corpo e uno stessofluido, a velocita “piccole” l’attrito e proporzionale alla velocita,mentre a velocita “grandi” e proporzionale al quadrato dellavelocita.
17 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito viscoso
Se una velocita sia “piccola” o “grande” dipende dal numero diReynolds:
La viscosita calcolata in unita di misura del SI assume valoricaratteristici:
Al variare del numero di Reynolds Re si ha:
Re =ρvL
µ
ρ densita del fluido
v velocita scalare relativa tra fluido eparticella
L lunghezza “caratteristica” del sistema(raggio se sfera, larghezza se lamina...)
µ viscosita, definita in base alla forzanecessaria per dare velocita al fluido:µ = F
Adu
18 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito viscoso
Se una velocita sia “piccola” o “grande” dipende dal numero diReynolds:
La viscosita calcolata in unita di misura del SI assume valoricaratteristici:
Al variare del numero di Reynolds Re si ha:
per fluidi poco viscosi come l’acqua, µ Ord (10)−3
per fluidi molto viscosi come l’olio, µ O(1),Ord (10)−1
per gas, µ Ord (10)−5
19 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito viscoso
Se una velocita sia “piccola” o “grande” dipende dal numero diReynolds:
La viscosita calcolata in unita di misura del SI assume valoricaratteristici:
Al variare del numero di Reynolds Re si ha:
Re < 1
Forza di attrito proporzionale alla velocita, e.g.legge di Stokes per sfere in fluido:
Fa = 6πµrv
20 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito viscoso
Se una velocita sia “piccola” o “grande” dipende dal numero diReynolds:
La viscosita calcolata in unita di misura del SI assume valoricaratteristici:
Al variare del numero di Reynolds Re si ha:
Re Ord (10)3
Moto in regime turbolento, indipendente dallaviscosita (“inerziale”), forza di attrito pro-porzionale al quadrato della velocita:
Fa = 12
caeroρAtrasvv2
21 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito viscoso
Se una velocita sia “piccola” o “grande” dipende dal numero diReynolds:
La viscosita calcolata in unita di misura del SI assume valoricaratteristici:
Al variare del numero di Reynolds Re si ha:
Re < Ord (10)3Moto in regime laminare, forza di attrito pro-
porzionale alla velocita stimabile con la legge
di Stokes:
22 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Forza di attrito viscoso: esempi
Goccia di acqua microscopica (r ≈ 10 µm) in aria
Re = ρvLµ
= O(1)Ord(10)−2Ord(10)−5
Ord(10)−5 << 1
moto con attrito viscoso proporzionale alla velocita secondo lalegge di Stokes
Biglia di acciaio del diametro di un centimetro che cade dentro l’olio di
glicerina ad una velocita tipica di circa un metro al secondo.
Re = ρvLµ
= Ord(10)3O(1)Ord(10)−2
O(1)≈ 10
moto laminarese attrito viscoso proporzionale alla velocita secondo la legge diStokes, l’intensita della forza di attrito Fa = 6πµrv ' 0.10 Nse attrito viscoso proporzionale alla velocita al quadrato l’intensitadella forza di attrito Fa = 1
2caeroρAtrasvv2 ' 0.01 N
In regime laminare si preferisce usare la legge di Stokes
Proiettile di pistola in acqua:
Re = ρvLµ
= O(1000)Ord(10)2Ord(10)−2
Ord(10)−3 ' 106
moto con attrito viscoso proporzionale al quadrato della velocitaFa = 1
2caeroρAtrasvv2 ' 500 N
23 / 36
Forze
Sistemi inmotorelativo
Forzeapparenti
Due sistemi di riferimento cartesiani
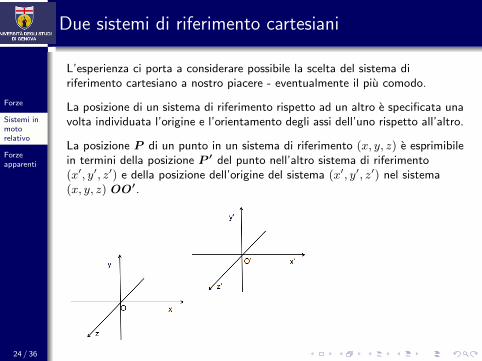
L’esperienza ci porta a considerare possibile la scelta del sistema diriferimento cartesiano a nostro piacere - eventualmente il piu comodo.
La posizione di un sistema di riferimento rispetto ad un altro e specificata unavolta individuata l’origine e l’orientamento degli assi dell’uno rispetto all’altro.
La posizione P di un punto in un sistema di riferimento (x, y, z) e esprimibilein termini della posizione P ′ del punto nell’altro sistema di riferimento(x′, y′, z′) e della posizione dell’origine del sistema (x′, y′, z′) nel sistema(x, y, z) OO′.
24 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Due sistemi di riferimento cartesiani
L’esperienza ci porta a considerare possibile la scelta del sistema diriferimento cartesiano a nostro piacere - eventualmente il piu comodo.
La posizione di un sistema di riferimento rispetto ad un altro e specificata unavolta individuata l’origine e l’orientamento degli assi dell’uno rispetto all’altro.
La posizione P di un punto in un sistema di riferimento (x, y, z) e esprimibilein termini della posizione P ′ del punto nell’altro sistema di riferimento(x′, y′, z′) e della posizione dell’origine del sistema (x′, y′, z′) nel sistema(x, y, z) OO′.
25 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Due sistemi di riferimento cartesiani
L’esperienza ci porta a considerare possibile la scelta del sistema diriferimento cartesiano a nostro piacere - eventualmente il piu comodo.
La posizione di un sistema di riferimento rispetto ad un altro e specificata unavolta individuata l’origine e l’orientamento degli assi dell’uno rispetto all’altro.
La posizione P di un punto in un sistema di riferimento (x, y, z) e esprimibilein termini della posizione P ′ del punto nell’altro sistema di riferimento(x′, y′, z′) e della posizione dell’origine del sistema (x′, y′, z′) nel sistema(x, y, z) OO′.
26 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Due sistemi di riferimento cartesiani
L’esperienza ci porta a considerare possibile la scelta del sistema diriferimento cartesiano a nostro piacere - eventualmente il piu comodo.
La posizione di un sistema di riferimento rispetto ad un altro e specificata unavolta individuata l’origine e l’orientamento degli assi dell’uno rispetto all’altro.
La posizione P di un punto in un sistema di riferimento (x, y, z) e esprimibilein termini della posizione P ′ del punto nell’altro sistema di riferimento(x′, y′, z′) e della posizione dell’origine del sistema (x′, y′, z′) nel sistema(x, y, z) OO′.
P = OO′ + P ′
27 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Posizione, velocita e accelerazione relativa
In generale in un sistema di riferimento possiamo prendere due vettoriposizione x1 e x2, e poi domandarci quale e la posizione del punto “2” seconsideriamo come origine il punto “1” (“la posizione relativa del punto 2rispetto al punto 1”): la posizione relativa x1x2 o x12 e il vettorespostamento ∆x = x2 − x1.
La velocita del punto “2” rispetto al punto “1” e la velocita relativa v2,1
ottenuta dalla derivata della posizione relativa:
v2,1 =dx12
dt=
d(x2 − x1)
dt= v2 − v1.
La accelerazione relativa a2,1 e analogamente ottenuta dalla derivata della
velocita relativa: a2,1 =dv2,1
dt=
d(v2 − v1)
dt= a2 − a1.
Invertendo il ragionamento otteniamo che:
x21 = x1 − x2 = −x12
v1,2 = −v2,1
a1,2 = −a2,1
28 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Posizione, velocita e accelerazione in due sistemi diriferimento
Se ora il punto “1” rappresenta l’origine di un sistema di riferimento e ilpunto “2” rappresenta la posizione di un punto - eventualmente l’origine delsistema di riferimento “2”, possiamo dire che x1x2 e la posizione del punto“2” nel sistema di riferimento “1”: x1
x2.
Per evitare fraintendimenti tra elevazione al quadrato e sistema di riferimentosi indicano i sistemi di riferimento con degli apici: per cui se x1
P (o piusemplicemente xP ) e una posizione nel sistema di riferimento “1” (senzaapici) abbiamo che x′
P e la posizione dello stesso punto espressa nel sistemadi riferimento “2”.
Analogamente definiamo velocita e accelerazione di “2” in “1” come v12 o v2
e a12 o a2.
“Considerando le cose relativamente dal punto di vista di “2” ” abbiamo:
x1x2
= xx2 = −x′x1
v2 = −v′1
a2 = −a′1
29 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Trasformazione delle velocita
Se ora il punto descritto dal vettore posizione P (t) nel sistemadi riferimento (x, y, z) e in moto possiamo esprimere la sua
velocita VP =dP (t)
dtvista nel sistema di riferimento (x′, y′, z′):
V ′P =
dP ′(t)dt
=d(P (t) − OO′)
dt= VP . Ovvero: la velocita
di un corpo descritta in due sistemi di riferimento diversi,immobili tra di loro, e uguale.
30 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Sistemi di riferimento in moto translatorio relativotra di loro
Quando due sistemi sono in moto traslatorio relativo tra di loro siha che il moto dell’origine O′ del sistema (x′, y′, z′) puo esseredescritto come il moto di un corpo nel sistema (x, y, z), fermorestanto che l’orientamento degli assi cartesiani dei due sistemirimanga immutato nel tempo.
In un moto traslatorio non e necessario che la velocita relativa deisistemi di riferimento sia costante.
31 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Sistemi di riferimento in moto translatorio relativotra di loro
Quando due sistemi sono in moto traslatorio relativo tra di loro siha che il moto dell’origine O′ del sistema (x′, y′, z′) puo esseredescritto come il moto di un corpo nel sistema (x, y, z), fermorestanto che l’orientamento degli assi cartesiani dei due sistemirimanga immutato nel tempo.
In un moto traslatorio non e necessario che la velocita relativa deisistemi di riferimento sia costante.
OO′(t) = OO′(0) + VO′t
OO′(t) = OO′(0) +
∫VO′(t)dt
32 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Sistemi di riferimento in moto translatorio relativotra di loro
Quando due sistemi sono in moto traslatorio relativo tra di loro siha che il moto dell’origine O′ del sistema (x′, y′, z′) puo esseredescritto come il moto di un corpo nel sistema (x, y, z), fermorestanto che l’orientamento degli assi cartesiani dei due sistemirimanga immutato nel tempo.
In un moto traslatorio non e necessario che la velocita relativa deisistemi di riferimento sia costante.
OO′(t) = OO
′(0) + VO′ t
OO′(t) = OO
′(0) +
∫VO′ (t)dt
O′O(t) = O
′O(0) + V
′Ot
O′O(t) = O
′O(0) +
∫V
′O(t)dt
O′O(t) = −OO
′(0)− VO′ t
O′O(t) = −OO
′(0)−
∫VO′ (t)dt
33 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Trasformazione delle velocita
E facile per sistemi in moto traslatorio relativo ottenerel’espressione per la velocita di un punto espressa in uno dei duesistemi, una volta note la velocita nell’altro e la velocita relativadei due sistemi: questa operazione si chiama trasformazioneGalileiana delle velocita.
V ′P =
d(P (t) − OO′)dt
= VP − VO′(t)
VP = V ′P + VO′(t)
VP =d(P ′(t) − O′O)
dt= V ′
P − V ′O(t)
34 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Trasformazione delle accelerazioni
Sempre per sistemi in moto traslatorio relativo otteniamol’espressione per le accelerazioni derivando ulteriormente:
A′P = AP −AO′(t)
AP = A′P + AO′(t)
AP = A′P −A′
O(t)
Per sistemi in moto uniforme traslatorio relativo - sistemi inerziali- le accelerazioni sono uguali nei due sistemi di riferimento.
A′P = AP
35 / 36

Forze
Sistemi inmotorelativo
Forzeapparenti
Sistemi in moto traslatorio rettilineo accelerato
Un corpo di massa m soggetto a forze reali in un sistema inerziale FI simuove con accelerazione maI = FI .
Prendiamo lo stesso corpo, soggetto sempre alle stesse forze reali, questavolta in un sistema di riferimento non inerziale che si muove in motorettilineo accelerato misurato con accelerazione aIT R in un altro sistema diriferimento (il piu possibile) inerziale. Per le accelerazioni abbiamo:
aNI = aI − aIT R
Chi si trova nel sistema di riferimento non inerziale misurera un’accelerazionequindi pari a quella che aveva nel sistema inerziale, ed una accelerazionedovuta all’accelerazione del suo sistema. In termini di forze, applicando ilsecondo principio, abbiamo:
maNI = FI −maIT R
maNI = FI + FAP P
FAP P = −maIT R
36 / 36