further studies into the dynamics of a supercavitating · pdf filefurther studies into the...
TRANSCRIPT

Further Studies into the Dynamics of a Supercavitating Torpedo
Eric A. Euteneuer
University of Minnesota Department of Aerospace Engineering and Mechanics
107 Akerman Hall 110 Union ST SE
Minneapolis, MN 55455
July 18, 2003

Acknowledgements I would like to thank Mike Elgersma, Ph.D. for his technical help and guidance on this
work and thesis. His attention to detail and vast dynamics knowledge has saved me an
immense amount of time and headache. I would also like to thank my advisor Prof. Gary
Balas for his guidance and patience throughout this work. Also deserving mention is
Ivan Kirschner at Anteon Corporation. His work, and that of his peers, helped provide
the backbone to this thesis work.
i
For my Sara… Thank you!
ii

Table of Contents Further Studies into the Dynamics of a Supercavitating Torpedo....................................... i Acknowledgements.............................................................................................................. i Table of Contents............................................................................................................... iii List of Figures .................................................................................................................... iv Lift of Tables....................................................................................................................... v List of Symbols .................................................................................................................. vi Abstract ............................................................................................................................... 1 1 Introduction................................................................................................................. 1
1.1 Focus of Thesis ................................................................................................... 2 2 General Hydrodynamics ............................................................................................. 3 3 Vehicle Dynamics....................................................................................................... 6
3.1 Coordinate System, States, and Control Variables ............................................. 6 3.1.1 Flow Angles ................................................................................................ 8 3.1.2 Torpedo Dimensions................................................................................... 8
3.2 Cavity Dynamics................................................................................................. 9 3.2.1 Maximum Cavity Dimensions .................................................................. 10 3.2.2 Cavity Centerline ...................................................................................... 10 3.2.3 Cavity Closure .......................................................................................... 15 3.2.4 Final Cavity Shape.................................................................................... 17
3.3 Cavitator Forces ................................................................................................ 18 3.4 Fin Forces.......................................................................................................... 21
3.4.1 Cavity-Fin Interaction............................................................................... 27 3.4.2 Computation of the Fin Forces and Moments........................................... 28 3.4.3 Notes on Fin Forces .................................................................................. 33
3.5 Planing Forces................................................................................................... 33 3.5.1 Computation of the Planing Forces........................................................... 37
3.5.1.1 Pressure Forces and Moments .............................................................. 38 3.5.1.2 Skin Friction Forces.............................................................................. 39 3.5.1.3 Added Mass and Impact Forces............................................................ 40 3.5.1.4 Total Planing Forces and Moments ...................................................... 40
3.5.2 Effects of Planing...................................................................................... 41 3.6 Mass and Inertial Forces ................................................................................... 42
3.6.1 Center of Mass .......................................................................................... 43 3.6.2 Mass Moments of Inertia .......................................................................... 44
3.7 Putting it all Together ....................................................................................... 46 3.7.1 EOM about an Arbitrary Point.................................................................. 48 3.7.2 Implementation ......................................................................................... 49
4 Linearization ............................................................................................................. 51 4.1 General Linearization Procedures and Information.......................................... 52
4.1.1 Limitations of Linearization ..................................................................... 53 5 Flight Envelope......................................................................................................... 54 6 Stability and System Poles........................................................................................ 56
6.1 Phase Plane Analysis ........................................................................................ 58
iii

6.2 Simulation and Integration Schemes ................................................................ 58 6.3 Nominal System Stability ................................................................................. 59
7 Control Law Design.................................................................................................. 63 7.1 Transfer Functions ............................................................................................ 64
7.1.1 1DOF Controller ....................................................................................... 66 7.1.2 Closed-Loop Transfer Functions .............................................................. 67
7.2 Continuous-Time Linear Quadratic Controller................................................. 68 7.2.1 Closed-Loop Dynamics ............................................................................ 69
7.3 Transformed System ......................................................................................... 72 8 Model Uncertainty .................................................................................................... 74
8.1.1 Open-Loop Effects of Parametric Uncertainty ......................................... 76 8.1.2 General Control Configuration with Uncertainty ..................................... 78
9 General Conclusions ................................................................................................. 79 10 Bibliography ......................................................................................................... 81 Appendix A: Fin Force and Moment Coefficient Data Computed Directly From Anteon’s Fin Look-up Table ............................................................................................................ 83 Appendix B ..................................................................................................................... 100 Appendix C ..................................................................................................................... 154 Appendix D..................................................................................................................... 156
List of Figures Figure 1: Schematic of Cavitation Flow Regimes [6] ........................................................ 4 Figure 2: Moment and Angular Rotation Notation............................................................. 7 Figure 3: Artists Conception of a Supercavitating Torpedo ............................................... 9 Figure 4: Displacement Model Comparisons ................................................................... 12 Figure 5: Pole Comparison of Systems with Delays vs. "Classic" Centerline
Displacement............................................................................................................. 15 Figure 6: Cavity Closure Schemes.................................................................................... 16 Figure 7 : Cavity Shape Components ............................................................................... 17 Figure 8: Overall Cavity Shape......................................................................................... 17 Figure 9: Cavitator Free-Body Diagram........................................................................... 18 Figure 10: Cavitator Forces and Moments - α Test.......................................................... 20 Figure 11: Cavitator Forces and Moments - β Test ........................................................ 21 Figure 12: Fin Geometry................................................................................................... 22 Figure 13: Representation of a Subset of Forces Acting on the Fin and the Appropriate
Flow Regimes ........................................................................................................... 23 Figure 14: Anteon Look-Up Table Data........................................................................... 24 Figure 15: Coefficient Data Using Least Squares Approximations.................................. 27 Figure 16: Fin and Supercavity Interaction ...................................................................... 28 Figure 17: Cruciform Orientation of Fins (View from Nose)........................................... 28 Figure 18: Fin Forces and Moments - α Test ................................................................... 32 Figure 19: Fin Forces and Moments - β Test.................................................................... 33 Figure 20: Displacement Hull........................................................................................... 34 Figure 21: Planing Hull..................................................................................................... 34
iv
Figure 22: Possible Supercavitating Flow Schemes with Planing Forces ........................ 35 Figure 23: Spring-Mass 2nd Order System with Dead-Zone ........................................... 35 Figure 24: Cavity Behavior in an Extreme Turn [1]......................................................... 37 Figure 25: Sketch of Planing Region of Torpedo ............................................................. 38 Figure 26: FFT of Planing Forces..................................................................................... 42 Figure 27: Drawing of Torpedo (In Sectional Form)........................................................ 44 Figure 28: Simulation Time Step Comparisons: 1 deg Step in Elevators......................... 50 Figure 29: Torpedo Flight Envelope for Non-Planing Flight ........................................... 55 Figure 30: Nominal System Pole-Zero Map..................................................................... 60 Figure 31: Nonlinear Step Responses ............................................................................... 61 Figure 32: Comparison of Nonlinear and Linear System Transients with a 1 deg Elevator
Step ........................................................................................................................... 62 Figure 33: Closed-Loop Block Diagrams ......................................................................... 66 Figure 34:Closed-Loop Pole-Zero Map of Nominal System with LQR Controller ......... 70 Figure 35: Closed-Loop Transients (1 deg/sec Step in r) ................................................. 71 Figure 36: Pole-Zero Map of Transformed System.......................................................... 73 Figure 37: System Dynamics Comparison for a Varying Cavitation Number ................. 77 Figure 38: Generalized Control Configuration (for Controller Synthesis) ....................... 78
Lift of Tables Table 1: Choices for State Variables .................................................................................. 7 Table 2: Equation Coefficient Values............................................................................... 26 Table 3: Coefficient %-Errors........................................................................................... 26 Table 4: Nominal System Pole Information ..................................................................... 59 Table 5: Eigenvectors of Unstable Poles of Nominal System .......................................... 60 Table 6: Uncertain Parameters.......................................................................................... 75
v

List of Symbols psv saturated vapor pressure
p∞ free-stream pressure
pc cavity pressure
ρ water density
V free-stream velocity
σ cavitation number
σi cavitation “boundary”
Fr Froude Number
CQ ventilation coefficient
Q volumetric ventilation flow rate
g gravitational acceleration
Dcav cavitator diameter
Rcav cavitator radius
CDo cavitator drag coefficient at zero angle of attack
x state vector
Δ control vector
α angle of attack
β side-slip angle
Rc maximum cavity radius
Lc maximum cavity length
rc local cavity radius
ηc, hc cavity centerline displacements
aturn apparent turn acceleration
ag apparent tail-up acceleration
Fp “perpendicular” force acting on the cavitator
lcav moment arm, distance from the cavitator to the origin of the system
αcav cavitator apparent angle of attack
βcav cavitator apparent side-slip angle
vi

xcg position of the center of gravity, distance behind the cavitator
cavcav MF , cavitator forces and moments, respectively
imm fin immersion ratio
swp fixed fin sweep
swpf apparent fin sweep
CF, CM fin force and moment coefficients
P vector of coefficients used to calculate the fin force and moment
coefficients
E %-error of the least-squares approximation used for fin coefficient
computations
Φ vector of angles representing the radial locations of the fins
xpiv, rpiv location of the fin pivot points on the torpedo
finfin MF , fin forces and moments, respectively
Lplane length of the torpedo hull that is planing
hplane maximum planing depth
αplane planing immersion angle
θplane angle measurement of the lateral displacement of the torpedo compared
to the cavity centerline
Δp radius difference of the cavity and the torpedo at the transom of the
planing section
planeplane MF , planing forces and moments, respectively
J rotational inertia
ν velocity vector, [u, v, w]T
ω rotational velocity vector, [p, q, r]T
M mass matrix
Ω rotational velocity matrix
y system output
G system transfer function
d system disturbance
[A,B,C,D] system state-space matrices
vii

K control law
r reference signal
e error signal
n noise signal
Λ general uncertainty block
viii

Abstract Supercavitating torpedoes are complex systems that require an active controller,
which can ensure stability while enabling the torpedo to track a target. In addition, the
control law design process requires a dynamic model that captures the physics of the
problem. It is therefore necessary to define a full 6DOF nonlinear model that lends itself
to linearization for use in the control law design process. This thesis defines such a
model and also discusses such topics as control, model uncertainty, and sensitivity
analysis in order to provide a stepping stone for further studies.
Keywords: Cavitation, Supercavitation, Torpedo, Nonlinearities, Linearization
1 Introduction As is known, water is a nearly incompressible medium having properties weakly
changing under great pressure. However, when the pressure in liquid is reduced lower
than the saturated vapor pressure 021.0=svp MPascal, discontinuities in the form of
bubbles, foils and cavities, which are filled by water vapor, are observed in water.
Froude was the first to investigate this phenomenon and gave it the name cavitation,
originating from the Greek word cavity.
The history of hydrodynamics research displays an emphasis on eliminating
cavitation, chiefly because of the erosion, vibration, and acoustical signatures that often
accompany the effect. The drag-reducing benefits of cavitation, however, were noted
during the first half of the last century, and have received significant attention over the
last decade. The invention of the Russian Shkval, a supercavitating torpedo that was
demonstrated in the 1990’s, is proof of this. The issue with these torpedoes is that they
currently act like underwater bullets, projectiles that have no active control. In order to
design a control system for these types of vehicles so that they may track targets, the
dynamics must be modeled and analyzed.
There are special conditions that make modeling and control a challenge. The
main difficulties of using the supercavitating flow for underwater objects are connected
1
with a necessity of ensuring the object’s stability in conditions where there is a loss of
Archimedes buoyancy forces and where the location of the center of pressure is well
forward of the center of gravity. Also, whereas a fully-wetted vehicle develops
substantial lift in a turn due to vortex shedding off the hull, a supercavitating vehicle does
not develop significant lift over its gas-enveloped surfaces. These difficulties are in
addition to the highly nonlinear interaction between the cavity and the torpedo body.
However, with proper design, supercavitating vehicles can achieve high velocities
by virtue of reduced drag via a cavitation bubble generated at the nose of the vehicle such
that the skin fraction drag is drastically reduced. Depending on the type and shape of the
supercavitating vehicle under consideration, the overall drag coefficient can be reduced
by an order of magnitude compared to a fully-wetted vehicle.
Currently, the U.S. is pursuing supercavitating marine technology (specifically
torpedoes and other projectiles) and is looking for ways to guaranty stability while
tracking a target through active control, unlike the passively controlled Shkval that only
capable of traveling in straight lines. Supercavitating weapons work in the U.S. is being
directed by the Office of Naval Research (ONR) in Arlington, Va. In general, the ONR’s
efforts are aimed at developing two classes of supercavitating technologies: projectiles
and torpedoes. The focus of this thesis is on supercavitating torpedoes.
1.1 Focus of Thesis
The forces on cavitating bodies have been studied at least as far back as the
1920s; an example reference is Brodetsky (1923). Interest increased as focus shifted to
cavitating hydrofoils and propellers; see, for example, Tulin (1958). Since the late 1980s,
the emphasis has returned to nominally axis-symmetric bodies, although vehicle control
requires incorporation of cavitating lifting surface theory as well. Kirschner, et. al.
(1995), Fine and Kinnas (1993), and Savchenko, et al (1997) serve as suitable
introductions and May (1975) is an invaluable resource. The foreign literature contains
several landmark works, for example, Logvinovich, et al, (1985). Given the scope of this
research, the most valuable reference has been Kirschner, et. al at Anteon Corp. [1] This
2

reference provides the background and basic dynamic model on which most of this
research is based on and provides a model that the ONR is starting to use as a benchmark.
The main point that all these references make is that supercavitating torpedoes are
complex systems, systems that will require the use of an active controller in order to
guarantee stability while performing advanced maneuvers. This controller is necessary to
ensure stability and to enable the torpedo to track a target. However, the control law
design process requires a dynamic model that captures the physics of the problem.
Existing (public) models currently don’t model full six degree-of-freedom (6DOF)
dynamics and/or have other issues with them such as mismatching dynamic properties
between the linear and nonlinear models as does the current benchmark model used by
the Office of Naval Research (ONR). This full 6DOF model used by the ONR produces
stable nonlinear transients while the linearized model indicates that the system is
unstable. This prevents the use of the linear representation of the dynamics from being
used in control law design because it does not have the same dynamics as the nonlinear
model and thus eliminates many of the control designer’s tools.
Therefore it is convenient to define a full 6DOF nonlinear model that lends itself
to linearization for use in the control law design process. This thesis defines such a
model and also discusses such topics as control, model uncertainty, and sensitivity
analysis in order to provide a stepping stone for further studies.
2 General Hydrodynamics As is known, water is a practically incompressible medium having properties
weakly changing under pressure in hundreds and thousands of atmospheres. However,
when the pressure in the liquid reduces to the saturated vapor pressure, psv = 0.021
MPascals owing to the action of extending stresses, discontinuities on the form of
bubbles, foils and cavities which are filled by water vapor, are observed in water.
Cavitating flows are commonly described by the cavitation number, σ, and is
expressed as
3

2
c
21 V
pp
ρσ −= ∞ Equation 1
where ρ is the fluid density, V is the free-stream velocity, and and are the ambient
and cavity pressures, respectively. According to the degree, or size of σ, three cavitation
stages are defined:
∞p cp
1. Initial cavitation is the bubble stage and it is accompanied by the strong
characteristic noise of collapsing bubbles and is capable of destroying solid
material; for example, blades of screws, pumps, turbines.
2. Partial cavitation is the stage when arising cavities cover a cavitating body part.
The cavity pulses and is unstable.
3. Fully developed cavitation – supercavitation is the stage when the cavity
dimensions considerably exceed the body dimensions.
These stages are better illustrated in Figure 1. This figure shows a fictional cavitation
experiment that holds the velocity constant and allows varying amounts of ambient
pressure; various amounts of cavitation can be observed.
Figure 1: Schematic of Cavitation Flow Regimes [6]
4

Here, σi can be thought of as a type of performance boundary where iσσ > results in no
cavitation. For this study, the cavitation number is assumed constant, σ = 0.029, which is
low enough for natural supercavitation to occur.
Noncavitating flows occur at sufficiently high pressures. Supercavitation occurs
at very low pressures where a very long vapor cavity exists and in many cases the cavity
wall appears glassy and stable except near the end of the cavity. Limited cavitation is
seen between these two flow regimes.
Other parameters used to describe the supercavitating flows are the Froude (Fr)
number and the ventilation coefficient (CQ) and are shown below (respectively).
cavgD
V=Fr Equation 2
2cavVD
QCQ = Equation 3
Here g is the gravitational acceleration, the cavitator diameter is Dcav, V is the magnitude
of the vehicle’s velocity vector, and Q is the volumetric rate at which ventilation gas is
supplied to the cavity. The Froude number characterizes the importance of gravity to the
flow, and therefore governs distortions to the nominally axis-symmetric cavity centerline
shape. The ventilation coefficient governs the time-dependent behavior of the cavity as
ventilation gas is entrained by the flow. For the trajectories considered in this thesis, the
Froude number is typically on the order of 90 to 110. [1]
A supercavity can be maintained in one of two ways: (1) achieving such a high
speed that the water vaporizes near the nose of the body; or, (2) supplying gas to the
cavity at nearly ambient pressure. The first technique is known as vaporous or natural
cavitation. The second is termed ventilation, or artificial, cavitation. Note that each
concept involves some sort of cavitator with a clean edge to provide the sharp drop in
pressure required to form a clean cavity near the nose of the body. For simplicity, only
natural cavitation is considered in this thesis and thus the ventilation coefficient is zero.
It is, however, conceivable to think of controlling the ventilation, and thus the cavitation
number to affect the dynamics of the system. The effects of varying cavitation numbers
will be described in Section 8.1.1.
5
3 Vehicle Dynamics As was mentioned in the introduction, the bulk of this dynamic model is based on,
and expanded from, the work done by Ivan Kirschner et. al. at Anteon Corp under
direction of the ONR. For completeness, all the dynamics will be described in detail
here.
3.1 Coordinate System, States, and Control Variables
The model developed by Anteon uses the cavitator pivot point as the torpedo's
origin. However, for simplicity and for reasons of common convention, this thesis
computes the dynamics with the torpedo’s center of gravity as the origin.
The coordinate system was chosen to be the same as is defined by Kirschner et.
al. That is, ξ is positive forward of the center of mass, η is positive to the starboard
portion of the torpedo, and h is positive, as is defined by the right-hand rule, down. This
coordinate system will make up the body coordinate system. The symbols used
throughout the text correspond generally to current usage and are used in a consistent
manner.
The states of the system are the body component states, one set of the two widely
used. The two different choices can be seen in Table 1.
6
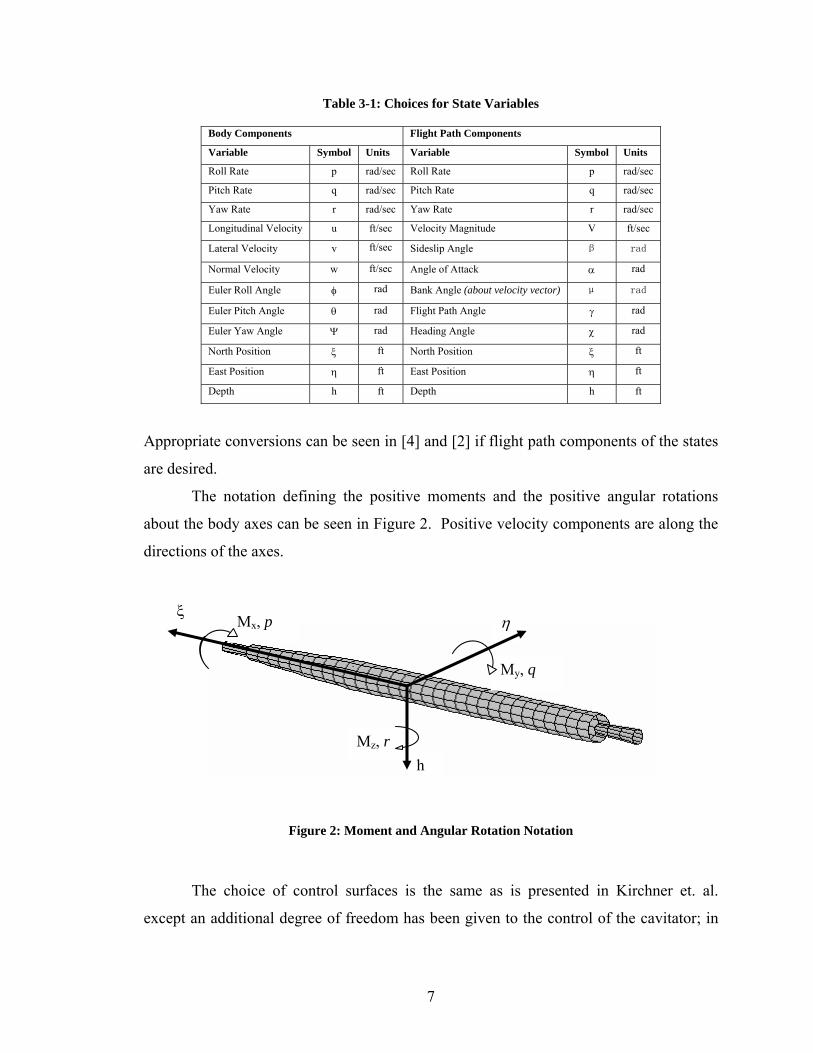
Table 3-1: Choices for State Variables
Body Components Flight Path Components
Variable Symbol Units Variable Symbol Units
Roll Rate p rad/sec Roll Rate p rad/sec
Pitch Rate q rad/sec Pitch Rate q rad/sec
Yaw Rate r rad/sec Yaw Rate r rad/sec
Longitudinal Velocity u ft/sec Velocity Magnitude V ft/sec
Lateral Velocity v ft/sec Sideslip Angle β rad
Normal Velocity w ft/sec Angle of Attack α rad
Euler Roll Angle φ rad Bank Angle (about velocity vector) μ rad
Euler Pitch Angle θ rad Flight Path Angle γ rad
Euler Yaw Angle Ψ rad Heading Angle χ rad
North Position ξ ft North Position ξ ft
East Position η ft East Position η ft
Depth h ft Depth h ft
Appropriate conversions can be seen in [4] and [2] if flight path components of the states
are desired.
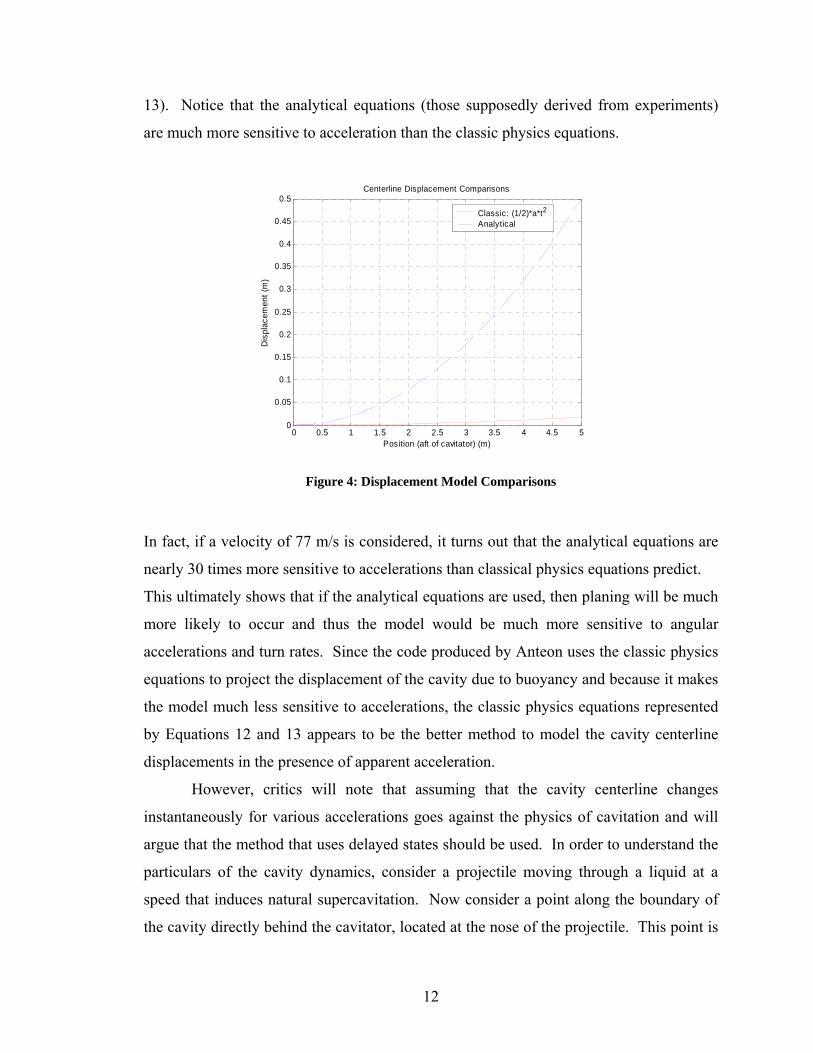
The notation defining the positive moments and the positive angular rotations
about the body axes can be seen in Figure 2. Positive velocity components are along the
directions of the axes.
Mz, r
My, q
Mx, p
h
η ξ
Figure 2: Moment and Angular Rotation Notation
The choice of control surfaces is the same as is presented in Kirchner et. al.
except an additional degree of freedom has been given to the control of the cavitator; in
7

addition of pivoting in the pitch axis, rotation in the yaw axis has also been considered in
the equations of motion.
Therefore, our states and controls are:
[ ]Trqpwvuhx ψθφηξ=
[ ]yawpitch cavcavffff δδδδδδ
4321=Δ
However, since the water density variation with depth is not modeled in this
investigation, all the position states, North, East, and depth position states, are just
kinematics and play no role in the dynamics modeled below. The state vector then
becomes
[ ]Trqpwvux ψθφ=
3.1.1 Flow Angles
It is useful to define the orientation of the torpedo about the velocity vector as
these values are often used to compute the forces and moments acting on the body. The
inclination of the body to the velocity vector is defined by the angle of attack and the
sideslip angle such that
uw1tan −=α Equation 4
222
1sinwvu
v
++= −β Equation 5
3.1.2 Torpedo Dimensions
Simulation was conducted on a vehicle with the following characteristics: 4.0 m
in length, 0.2 m in diameter, and with a cavitator diameter of 0.07 m. The fins were
located 3.5 m aft of the cavitator, and were swept back at 45º. Although the mass
8

properties of the vehicle will change as the rocket and ventilation fuels are consumed,
they are assumed constant for purposes of the current analysis. This model is an Applied
Research Lab (ARL) defined model.
3.2 Cavity Dynamics
The behavior of the cavity is central to the dynamics of a supercavitating vehicle.
It is the cavity that makes this dynamical system not only highly nonlinear, but dependent
on the history of the vehicle’s motion. The nominally steady cavity behavior forms the
basis of the quasi-time dependent model implemented for the current investigation. The
cavity model not only affects the forces acting at the nose of the vehicle, but also has a
strong influence on the fin forces and moments via the amount the fins are immersed in
the free-stream flow and the planing forces, both of which will be discussed in more
detail later in the thesis.
During supercavitation, the cavity stays attached to the body and the cavity
closure is far downstream. The length of the cavity does not vary significantly even
though considerable oscillations can occur at its closure. However, the cavity acts as if it
were an extension of the body. In this case, the same flow field would exist around a
solid body having a shape comprising of the wetted nose plus the free-cavity profile as
might be see in Figure 3.
Figure 3: Artists Conception of a Supercavitating Torpedo
9

3.2.1 Maximum Cavity Dimensions
The cavity itself is slender, and its maximum diameter is at least 5 times greater
than the cavitator diameter. For axis-symmetric flows, the maximum cavity diameter
(made dimensionless with the cavitator diameter) is a strong function of the cavitator
drag coefficient and the cavitation number, and is otherwise nearly independent of the
cavitator shape (Reichardt, 1946). In fact, both the cavity diameter and the cavity length
increase with cavitator drag and decrease with cavitation number.
Various analytical, numerical, and semi- and fully-empirical models have been
developed that provide estimates of the maximum cavity radius, Rc, and cavity length, Lc.
The analytical formulae of Reichardt (1946) provide useful and reasonably accurate1
approximations for investigation of cavity dynamics. These relations can be seen in
Equations 6-7.
( )2028.01*0
σσ ++= DD CC Equation 6
93.035.1 −= σDcavc CRR Equation 7
( 6.024.1 123.1 −= −σDcavc CDL )
Equation 8
where , R.8050.00
constCD == cav is the cavitator radius, and Dcav is the cavitator
diameter.
It is important to note that since the cavitation number σ is assumed constant for
this investigation, the drag coefficient is considered constant. This means that the
maximum cavity length and radius is assumed constant and will also affect the way that
the cavitator forces are computed. This is a very large assumption since physics dictate
that the cavitation number is going to change as the velocity and cavity change.
3.2.2 Cavity Centerline
There are essentially three methods (which are practical for time-based
simulations) to compute the cavity centerline: (1) Analytical formula developed by
Münzer and Reichardt (1950) which are described in the paper by Kirschner [1], (2)
1 The approximations are accurate for completely horizontal flows only.
10

“Classic” displacement equations based on acceleration, and (3) Use of past (delayed)
position states2 which are “coincident with the cavity centerline.” Let us first consider
the first two methods which are a function of the instantaneous states.
If the analytical formulas of Münzer and Reichardt as presented by Kirschner [1]
are used, the local cavity radius, η-, and h-offsets for a given distance behind the
cavitator are given in Equations 9-11, respectively.
4.21
2
cavc
cavccav
2/2//
1⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ −−=
DLDLDx
Rr cc Equation 9
2
cav
turn2c Fr
1)( ⎟⎟⎠
⎞⎜⎜⎝
⎛=
Dx
ga
xη Equation 10
2
cav
g2c Fr
1)( ⎟⎟⎠
⎞⎜⎜⎝
⎛−=
Dx
ga
xh Equation 11
where Fr is the Froude number, g is gravity, aturn is the apparent turn acceleration and ag
is the apparent tail-up acceleration of the cavity (which are both functions of the states).
ag is also a function of buoyancy, 8.29 m/s2. Although distortions to the cavity shape due
to turning and gravity have been considered, distortions associated with cavitator lift have
been ignored. For more information on how pitching the cavitator can affect cavity
dimensions see reference [9].
If the classic physics equations are used, η- and h-offsets are calculated by
Equations 12-13.
( )2
21 ⎟
⎠⎞
⎜⎝⎛=Vxax turncη Equation 12
( )2
21 ⎟
⎠⎞
⎜⎝⎛−=Vxaxh gc Equation 13
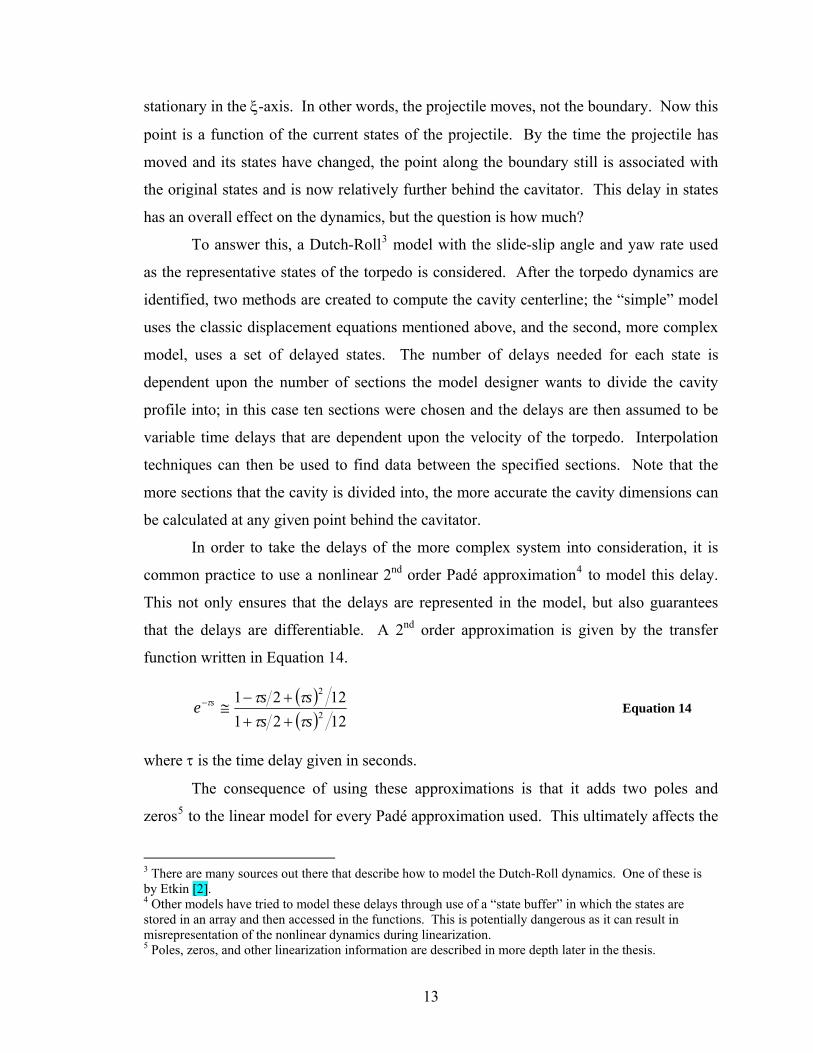
Figure 4 shows the drastic difference between the analytical set of equations (Eq.’s 10 &
11) derived by Munzer and Reichardt and the classic displacement equations (Eq’s 12 &
2 Position states (ξ, η, and h) were the option chosen by the researchers at Anteon, though they are not the only option. Delayed Euler angles would be another suitable option.
11
13). Notice that the analytical equations (those supposedly derived from experiments)
are much more sensitive to acceleration than the classic physics equations.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5Centerline Displacement Comparisons
Position (aft of cavitator) (m)
Dis
plac
emen
t (m
)
Classic: (1/2)*a*t2
Analytical
Figure 4: Displacement Model Comparisons
In fact, if a velocity of 77 m/s is considered, it turns out that the analytical equations are
nearly 30 times more sensitive to accelerations than classical physics equations predict.
This ultimately shows that if the analytical equations are used, then planing will be much
more likely to occur and thus the model would be much more sensitive to angular
accelerations and turn rates. Since the code produced by Anteon uses the classic physics
equations to project the displacement of the cavity due to buoyancy and because it makes
the model much less sensitive to accelerations, the classic physics equations represented
by Equations 12 and 13 appears to be the better method to model the cavity centerline
displacements in the presence of apparent acceleration.
However, critics will note that assuming that the cavity centerline changes
instantaneously for various accelerations goes against the physics of cavitation and will
argue that the method that uses delayed states should be used. In order to understand the
particulars of the cavity dynamics, consider a projectile moving through a liquid at a
speed that induces natural supercavitation. Now consider a point along the boundary of
the cavity directly behind the cavitator, located at the nose of the projectile. This point is
12
stationary in the ξ-axis. In other words, the projectile moves, not the boundary. Now this
point is a function of the current states of the projectile. By the time the projectile has
moved and its states have changed, the point along the boundary still is associated with
the original states and is now relatively further behind the cavitator. This delay in states
has an overall effect on the dynamics, but the question is how much?
To answer this, a Dutch-Roll3 model with the slide-slip angle and yaw rate used
as the representative states of the torpedo is considered. After the torpedo dynamics are
identified, two methods are created to compute the cavity centerline; the “simple” model
uses the classic displacement equations mentioned above, and the second, more complex
model, uses a set of delayed states. The number of delays needed for each state is
dependent upon the number of sections the model designer wants to divide the cavity
profile into; in this case ten sections were chosen and the delays are then assumed to be
variable time delays that are dependent upon the velocity of the torpedo. Interpolation
techniques can then be used to find data between the specified sections. Note that the
more sections that the cavity is divided into, the more accurate the cavity dimensions can
be calculated at any given point behind the cavitator.
In order to take the delays of the more complex system into consideration, it is
common practice to use a nonlinear 2nd order Padé approximation4 to model this delay.
This not only ensures that the delays are represented in the model, but also guarantees
that the delays are differentiable. A 2nd order approximation is given by the transfer
function written in Equation 14.
( )( ) 1221
12212
2
sssse s
τττττ
+++−
≅− Equation 14
where τ is the time delay given in seconds.
The consequence of using these approximations is that it adds two poles and
zeros5 to the linear model for every Padé approximation used. This ultimately affects the
3 There are many sources out there that describe how to model the Dutch-Roll dynamics. One of these is by Etkin [2]. 4 Other models have tried to model these delays through use of a “state buffer” in which the states are stored in an array and then accessed in the functions. This is potentially dangerous as it can result in misrepresentation of the nonlinear dynamics during linearization. 5 Poles, zeros, and other linearization information are described in more depth later in the thesis.
13
stability and controllability of the linear state-space representation of the nonlinear
system. In order to express how this happens, consider the linearized system A matrix,
( )j
i
xxf∂
Δ∂ ,, of the Dutch-Roll model based on instantaneous changes in the cavity
centerlinewhich is a function of the torpedo states only and call it A(xt). Now consider a
new A matrix that has components from the Padé approximations and call it A(xPadé). The
resultant A matrix is similar to a model based on a nonlinear model which includes the
both the torpedo model and the associated Padé approximations needed for the correct
computation of the cavity shape and would be similar to the one described in Equation
15.
Equation 15 ( )
( ⎥⎦
⎤⎢⎣
⎡=
′
−
ePad
RollDutch
xAbaxA
A )
If a and b are nonzero, it is possible that the system poles would be different from those
just computed from the torpedo states, or the “simple” model. In addition, in the process
of designing a controller, one would need to design a Kalman filter in order to
approximate the torpedo states before an actual control law could be defined, a possibly
difficult design process in itself.
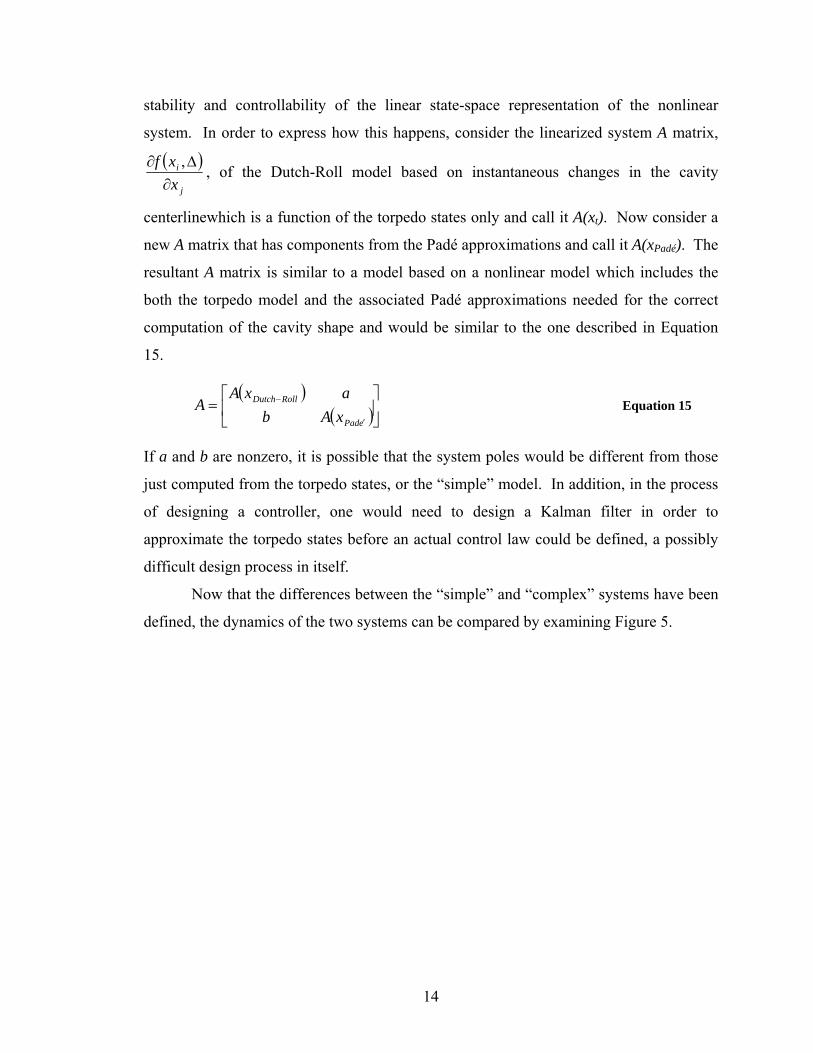
Now that the differences between the “simple” and “complex” systems have been
defined, the dynamics of the two systems can be compared by examining Figure 5.
14
-100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0-60
-40
-20
0
20
40
600.84 0.72 0.58 0.44 0.140.3
0.44 0.3 0.14
0.92
0.98
0.92
0.72 0.580.84
80
0.98
204060
Delayed States Method PolesDelayed States Method Zeros"Classic" Method Poles
Pole-Zero Map: Centerline Method Comparison
Real Axis
Imag
inar
y Ax
is
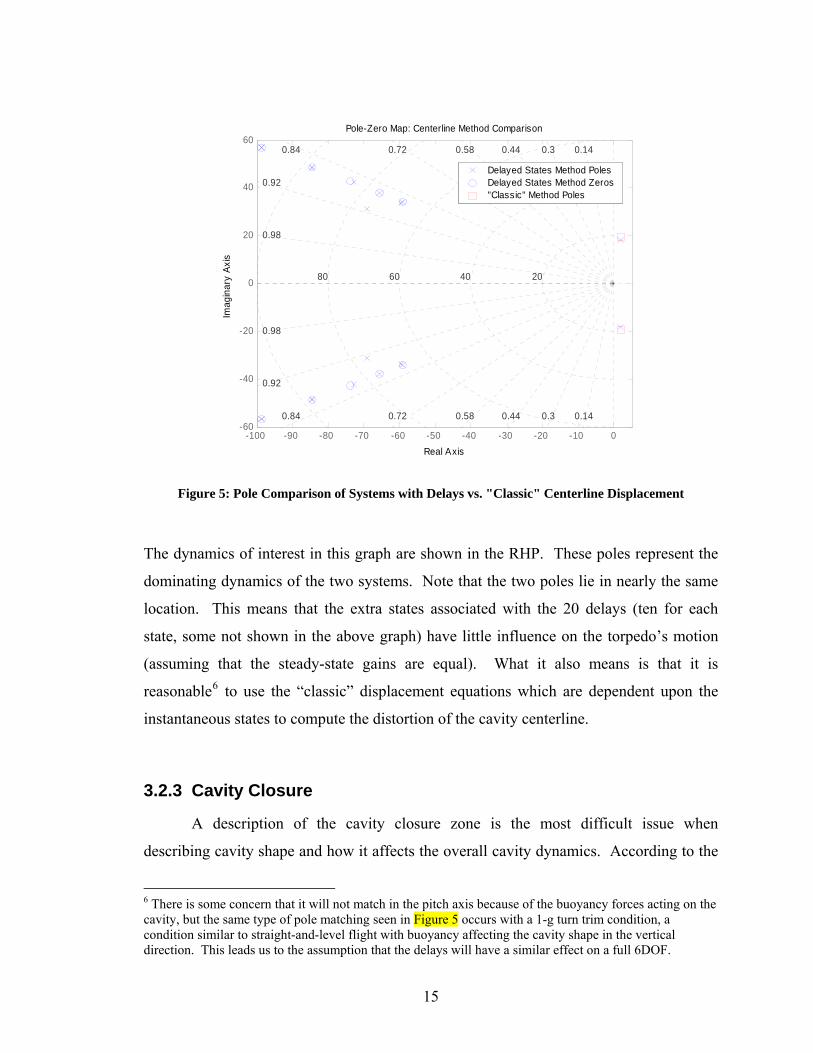
Figure 5: Pole Comparison of Systems with Delays vs. "Classic" Centerline Displacement
The dynamics of interest in this graph are shown in the RHP. These poles represent the
dominating dynamics of the two systems. Note that the two poles lie in nearly the same
location. This means that the extra states associated with the 20 delays (ten for each
state, some not shown in the above graph) have little influence on the torpedo’s motion
(assuming that the steady-state gains are equal). What it also means is that it is
reasonable6 to use the “classic” displacement equations which are dependent upon the
instantaneous states to compute the distortion of the cavity centerline.
3.2.3 Cavity Closure
A description of the cavity closure zone is the most difficult issue when
describing cavity shape and how it affects the overall cavity dynamics. According to the
6 There is some concern that it will not match in the pitch axis because of the buoyancy forces acting on the cavity, but the same type of pole matching seen in Figure 5 occurs with a 1-g turn trim condition, a condition similar to straight-and-level flight with buoyancy affecting the cavity shape in the vertical direction. This leads us to the assumption that the delays will have a similar effect on a full 6DOF.
15
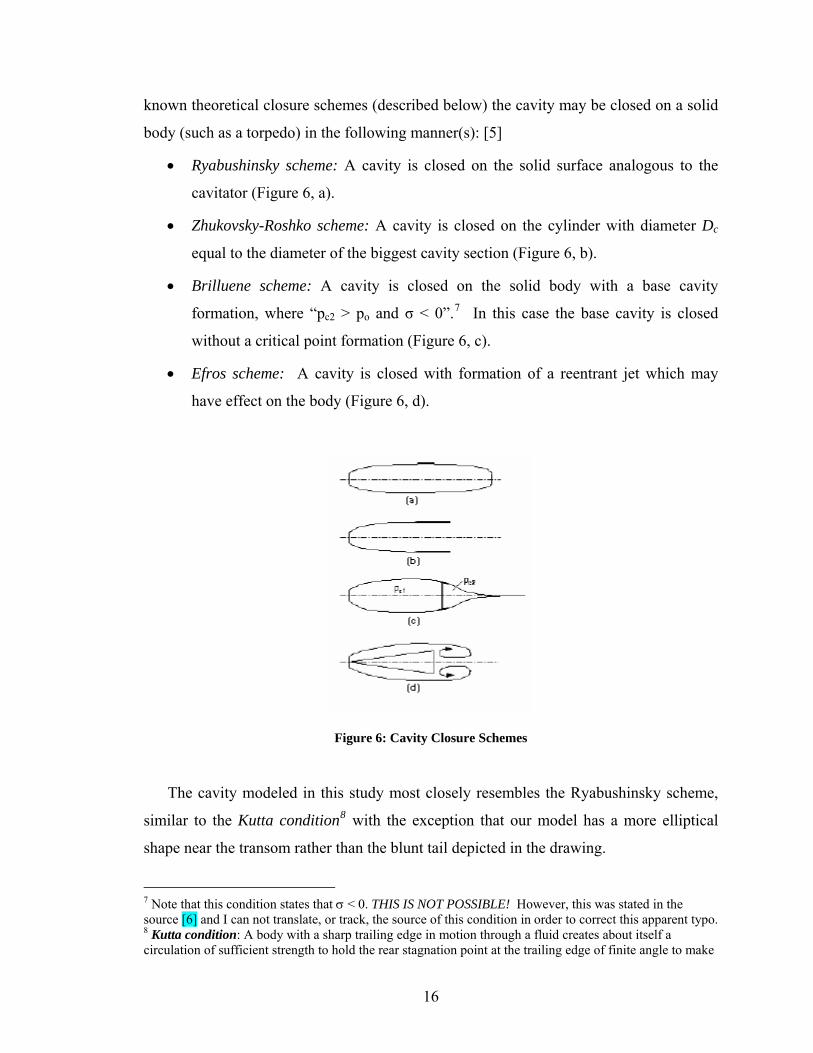
known theoretical closure schemes (described below) the cavity may be closed on a solid
body (such as a torpedo) in the following manner(s): [5]
• Ryabushinsky scheme: A cavity is closed on the solid surface analogous to the
cavitator (Figure 6, a).
• Zhukovsky-Roshko scheme: A cavity is closed on the cylinder with diameter Dc
equal to the diameter of the biggest cavity section (Figure 6, b).
• Brilluene scheme: A cavity is closed on the solid body with a base cavity
formation, where “pc2 > po and σ < 0”.7 In this case the base cavity is closed
without a critical point formation (Figure 6, c).
• Efros scheme: A cavity is closed with formation of a reentrant jet which may
have effect on the body (Figure 6, d).
Figure 6: Cavity Closure Schemes
The cavity modeled in this study most closely resembles the Ryabushinsky scheme,
similar to the Kutta condition8 with the exception that our model has a more elliptical
shape near the transom rather than the blunt tail depicted in the drawing.
7 Note that this condition states that σ < 0. THIS IS NOT POSSIBLE! However, this was stated in the source [6] and I can not translate, or track, the source of this condition in order to correct this apparent typo. 8 Kutta condition: A body with a sharp trailing edge in motion through a fluid creates about itself a circulation of sufficient strength to hold the rear stagnation point at the trailing edge of finite angle to make
16
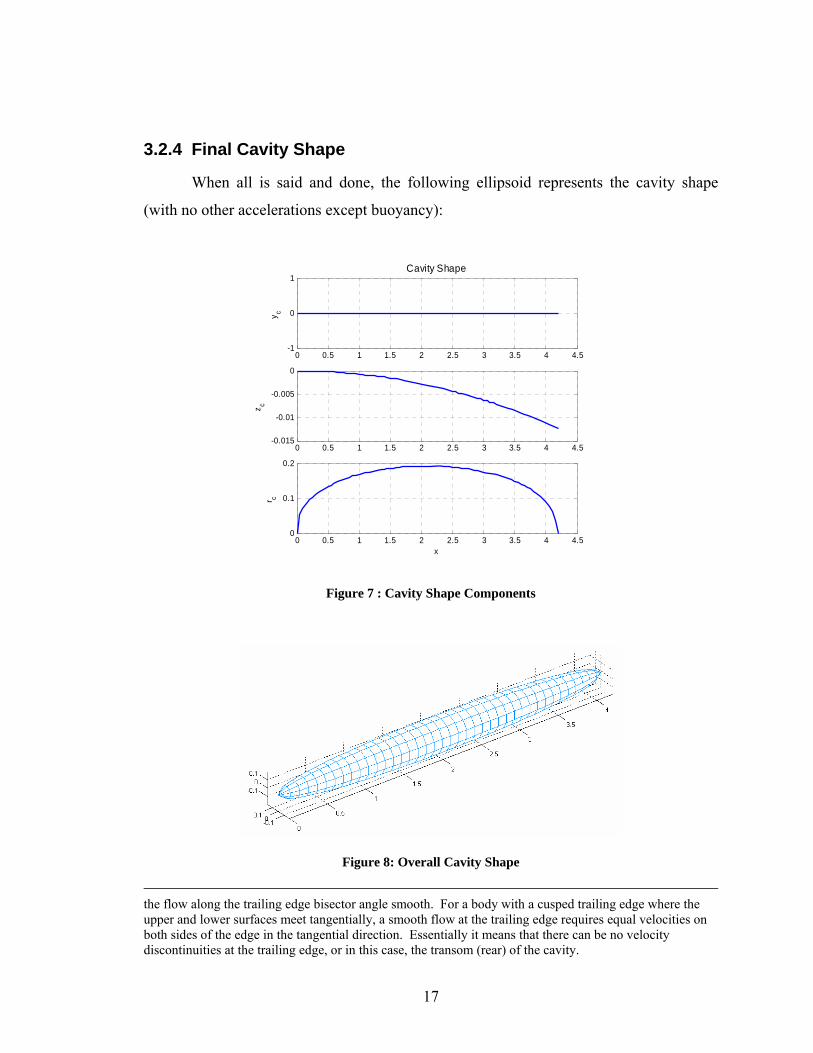
3.2.4 Final Cavity Shape
When all is said and done, the following ellipsoid represents the cavity shape
(with no other accelerations except buoyancy):
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5-1
0
1Cavity Shape
y c
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5-0.015
-0.01
-0.005
0
z c
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
0.1
0.2
r c
x
Figure 7 : Cavity Shape Components
Figure 8: Overall Cavity Shape
the flow along the trailing edge bisector angle smooth. For a body with a cusped trailing edge where the upper and lower surfaces meet tangentially, a smooth flow at the trailing edge requires equal velocities on both sides of the edge in the tangential direction. Essentially it means that there can be no velocity discontinuities at the trailing edge, or in this case, the transom (rear) of the cavity.
17

Remember that a negative h-value means “up.” If the torpedo were making a starboard
turn, the η-component of the cavity centerline would be nonzero and positive and similar
in shape to the h-component.
3.3 Cavitator Forces
Throughout this study of the supercavitating torpedo dynamics, several attempts
were made to describe the disk-cavitator forces. The first attempt didn’t proportionally
take into consideration the cavitator’s relative angle of attack or bank angle and the
second failed to model the lift and side forces correctly. However, by taking the apparent
flow angles into account (as shown in Figure 9), the cavitator forces can be computed as
a function of the disk’s “perpendicular” force, apparent angle of attack and apparent
sideslip angle.
βcav Fp
αcav
zcav
ycav
xbody
xcavybody
zbody
Figure 9: Cavitator Free-Body Diagram
where
( ) Dcavp CRVF 2221 πρ= Equation 16
pitchcavcav
cavwvu
qlδαα −
++−=
222 Equation 17
yawcavcav
cavwvu
rlδββ −
++−=
222 Equation 18
18

Fp is the “perpendicular” force acting on the cavitator, and lcav is the distance from the
cavitator to the origin of the system (in this case, the distance to the center of gravity). Fp
is considered perpendicular because the equation used to compute the force is based on
flows that are perpendicular to the cavitator disc.
The body components of the cavitator forces then become:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
cavcavp
cavp
cavcavp
cav
cav
cav
cav
FF
F
FFF
F
z
y
x
βαβ
βα
cossinsin
coscos Equation 19
The moments acting about the cavitator’s center of effect are assumed to be
negligible, but the moment about the center of gravity due to the forces is not. Since the
origin of the system is the center of gravity and the center of gravity is assumed to lie on
the ξ-axis, the moment arm, lcav, is equal to the location of the center of mass (xcg) and is
measured as the distance aft of the nose of the torpedo. Therefore, the moments
produced by the cavitator forces are:
[ ] cavT
cgcav FxM ×= 00 Equation 20
Remember that the assumption was made that the drag coefficient remains
constant and so Fp is always constant if the velocity is held constant. This means that the
cavitator forces and moments are only going to be a function of the apparent flow angles
cavα and cavβ .
In order to get a better idea of both the sign convention and sensitivity of the
cavitator forces to the apparent flow angles, a straight-and-level flight condition with a
velocity of 77 m/s is considered and cavα and cavβ are allowed to vary.
19
-20 -15 -10 -5 0 5 10 15 20-15000
-10000
-5000
0
5000
F cav
Cavitator Forces - α Test
-20 -15 -10 -5 0 5 10 15 20-1
-0.5
0
0.5
1x 10
4
α (deg)
Mca
v
Cavitator Moments - α Test
FxFyFz
MxMyMz
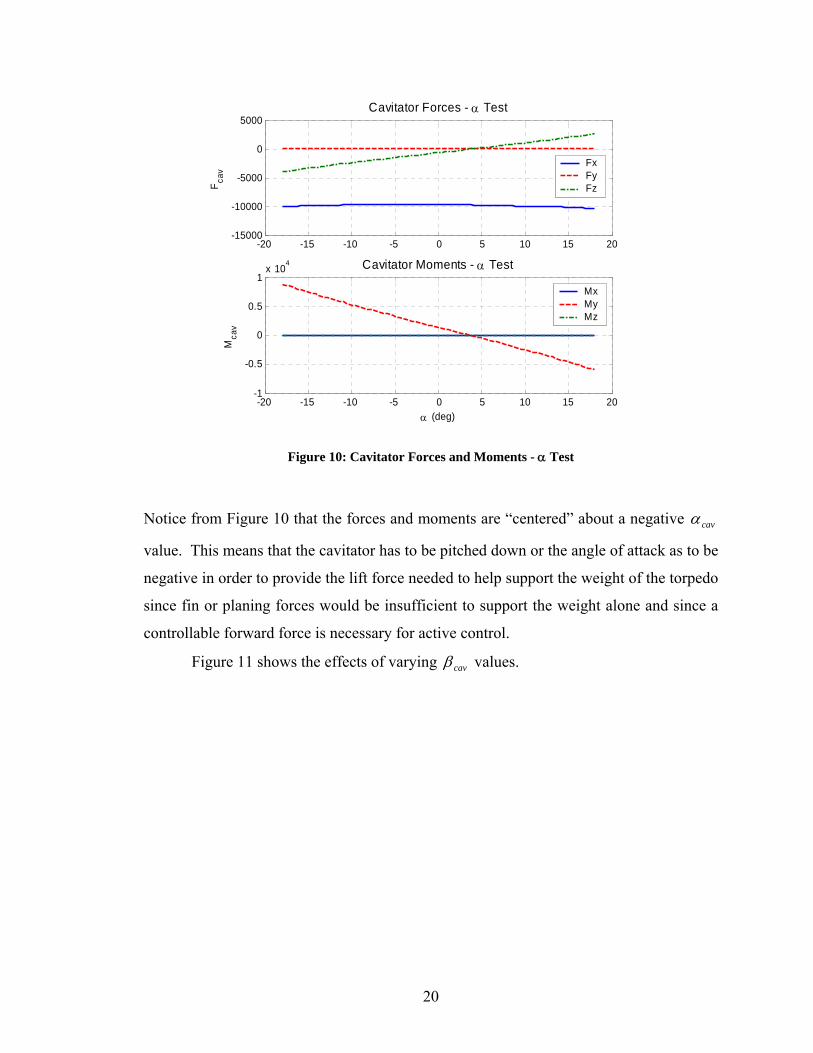
Figure 10: Cavitator Forces and Moments - α Test
Notice from Figure 10 that the forces and moments are “centered” about a negative cavα
value. This means that the cavitator has to be pitched down or the angle of attack as to be
negative in order to provide the lift force needed to help support the weight of the torpedo
since fin or planing forces would be insufficient to support the weight alone and since a
controllable forward force is necessary for active control.
Figure 11 shows the effects of varying cavβ values.
20
-20 -15 -10 -5 0 5 10 15 20-15000
-10000
-5000
0
5000
F cav
Cavitator Forces - β Test
-20 -15 -10 -5 0 5 10 15 20-1
-0.5
0
0.5
1x 10
4
β (deg)
Mca
v
Cavitator Moments - β Test
FxFyFz
MxMyMz
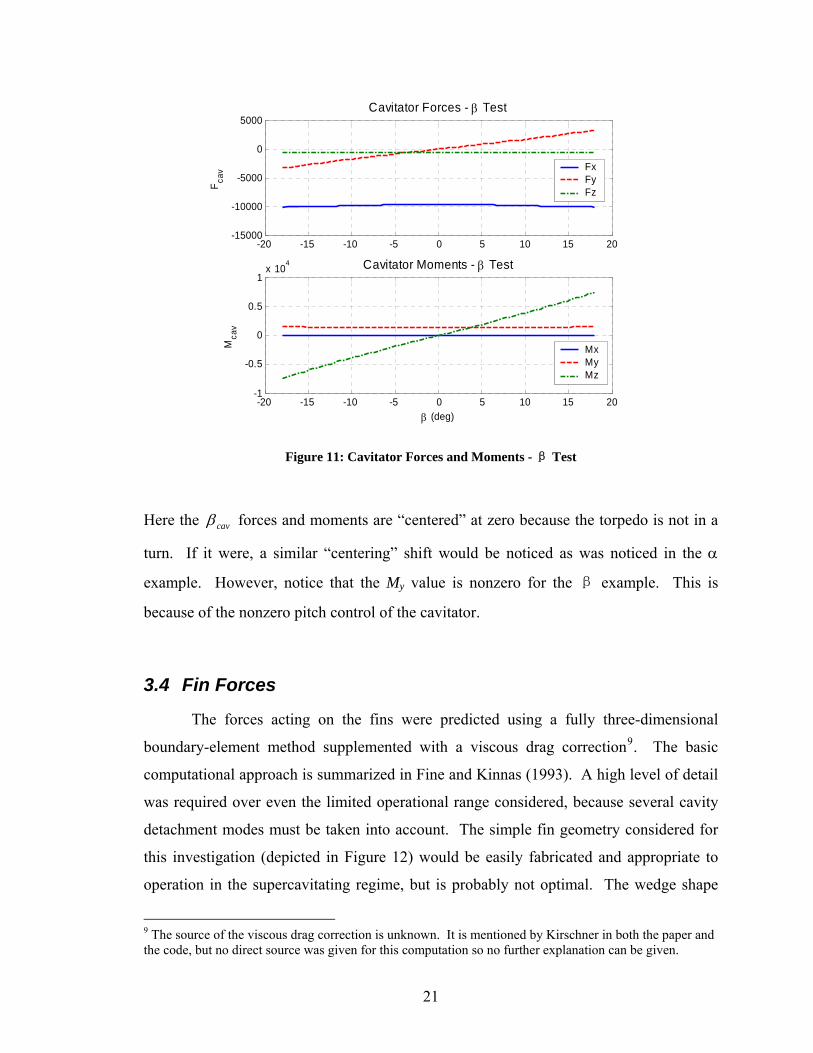
Figure 11: Cavitator Forces and Moments - β Test
Here the cavβ forces and moments are “centered” at zero because the torpedo is not in a
turn. If it were, a similar “centering” shift would be noticed as was noticed in the α
example. However, notice that the My value is nonzero for the β example. This is
because of the nonzero pitch control of the cavitator.
3.4 Fin Forces
The forces acting on the fins were predicted using a fully three-dimensional
boundary-element method supplemented with a viscous drag correction9. The basic
computational approach is summarized in Fine and Kinnas (1993). A high level of detail
was required over even the limited operational range considered, because several cavity
detachment modes must be taken into account. The simple fin geometry considered for
this investigation (depicted in Figure 12) would be easily fabricated and appropriate to
operation in the supercavitating regime, but is probably not optimal. The wedge shape
9 The source of the viscous drag correction is unknown. It is mentioned by Kirschner in both the paper and the code, but no direct source was given for this computation so no further explanation can be given.
21
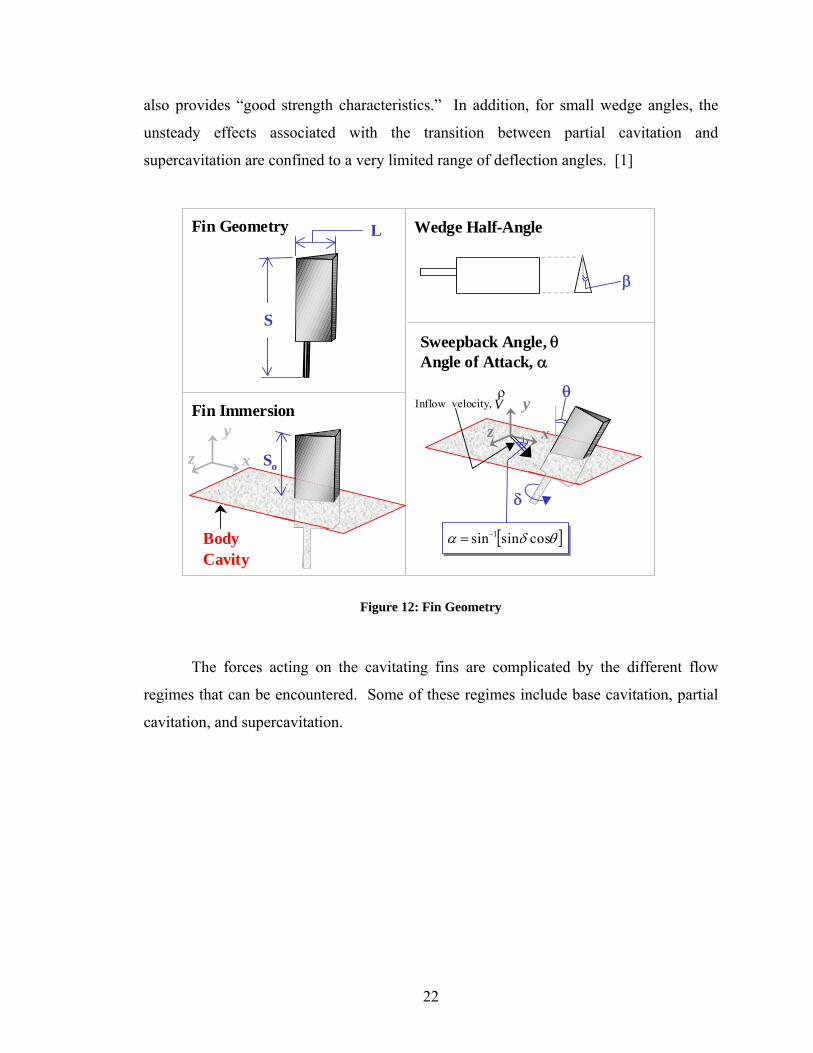
also provides “good strength characteristics.” In addition, for small wedge angles, the
unsteady effects associated with the transition between partial cavitation and
supercavitation are confined to a very limited range of deflection angles. [1]
L
S
Wedge Half-AngleFin Geometry
Fin Immersion
Sweepback Angle, θ Angle of Attack, α
[ ]θδα cossinsin 1−=
δ
So
Figure 12: Fin Geometry
The forces acting on the cavitating fins are complicated by the different flow
regimes that can be encountered. Some of these regimes include base cavitation, partial
cavitation, and supercavitation.
BodyCavity
x
y
zx
y
z
θ
β
Inflow velocity, Vρ
22
0.000
0.005
0.010
0.0150.020
0.025
0.0300.035
0.040
0.045
0.050
0.0 5.0 10.0 15.0
Fz
Angle of Attack (deg)
Partial CavityBase Cavity
Supercavityx
z
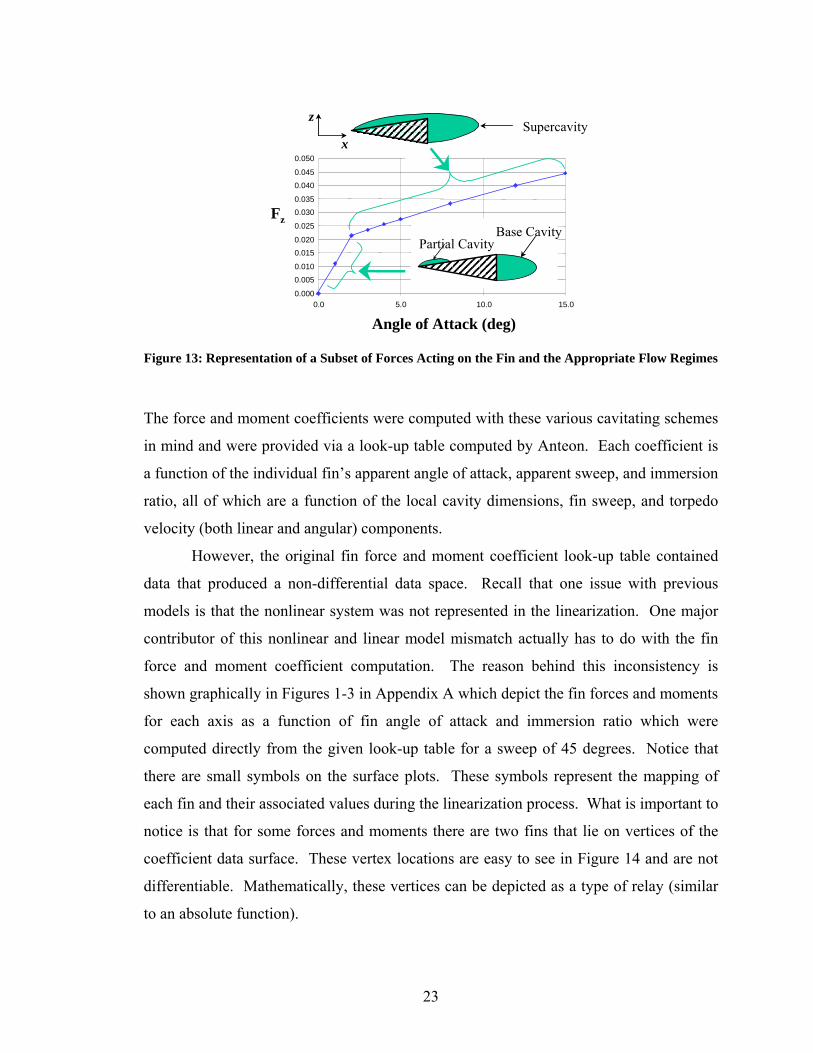
Figure 13: Representation of a Subset of Forces Acting on the Fin and the Appropriate Flow Regimes
The force and moment coefficients were computed with these various cavitating schemes
in mind and were provided via a look-up table computed by Anteon. Each coefficient is
a function of the individual fin’s apparent angle of attack, apparent sweep, and immersion
ratio, all of which are a function of the local cavity dimensions, fin sweep, and torpedo
velocity (both linear and angular) components.
However, the original fin force and moment coefficient look-up table contained
data that produced a non-differential data space. Recall that one issue with previous
models is that the nonlinear system was not represented in the linearization. One major
contributor of this nonlinear and linear model mismatch actually has to do with the fin
force and moment coefficient computation. The reason behind this inconsistency is
shown graphically in Figures 1-3 in Appendix A which depict the fin forces and moments
for each axis as a function of fin angle of attack and immersion ratio which were
computed directly from the given look-up table for a sweep of 45 degrees. Notice that
there are small symbols on the surface plots. These symbols represent the mapping of
each fin and their associated values during the linearization process. What is important to
notice is that for some forces and moments there are two fins that lie on vertices of the
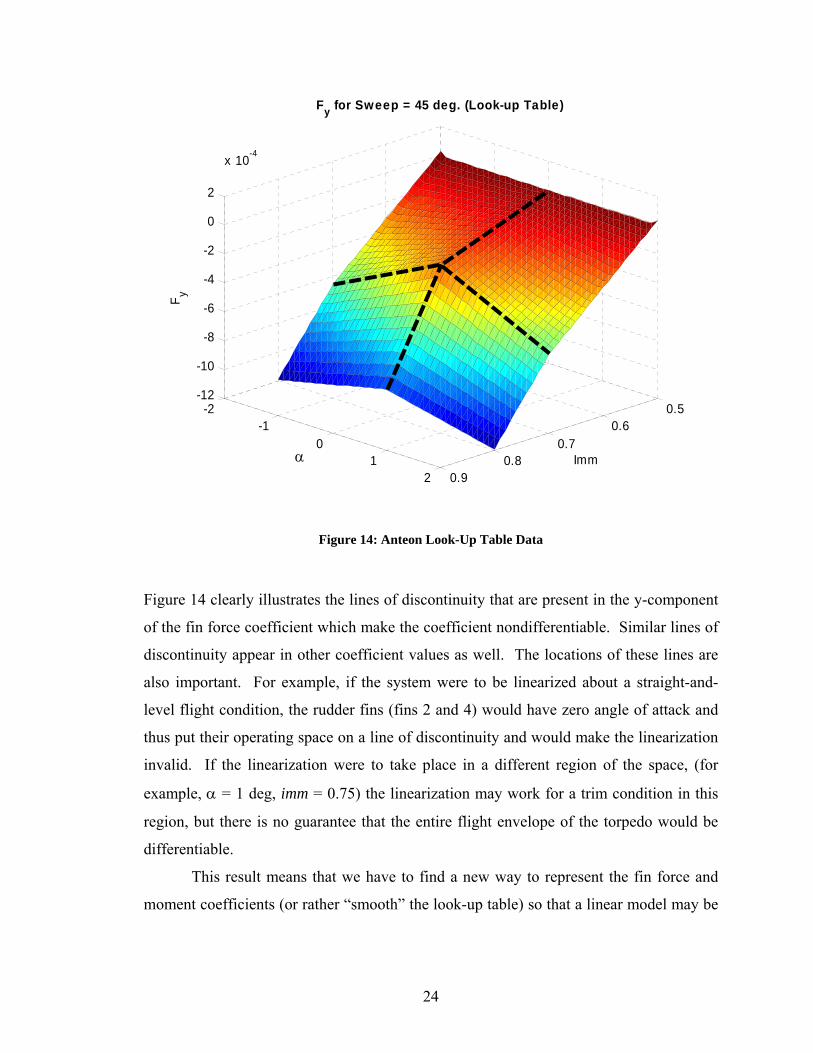
coefficient data surface. These vertex locations are easy to see in Figure 14 and are not
differentiable. Mathematically, these vertices can be depicted as a type of relay (similar
to an absolute function).
23
0.50.6
0.70.8
0.9
-2-1
01
2
-12
-10
-8
-6
-4
-2
0
2
x 10-4
Imm
Fy for Sweep = 45 deg. (Look-up Table)
α
F y
Figure 14: Anteon Look-Up Table Data
Figure 14 clearly illustrates the lines of discontinuity that are present in the y-component
of the fin force coefficient which make the coefficient nondifferentiable. Similar lines of
discontinuity appear in other coefficient values as well. The locations of these lines are
also important. For example, if the system were to be linearized about a straight-and-
level flight condition, the rudder fins (fins 2 and 4) would have zero angle of attack and
thus put their operating space on a line of discontinuity and would make the linearization
invalid. If the linearization were to take place in a different region of the space, (for
example, α = 1 deg, imm = 0.75) the linearization may work for a trim condition in this
region, but there is no guarantee that the entire flight envelope of the torpedo would be
differentiable.
This result means that we have to find a new way to represent the fin force and
moment coefficients (or rather “smooth” the look-up table) so that a linear model may be
24

computed in order to understand the system properties and to facilitate a (linear) control
law design.
In order to make the fin operating space completely differentiable for all flow
conditions, a parabolic least squares function was fitted to each of the fin force and
moment coefficients. This involves a least-squares type approximation to the fin force
and moment data provided by Anteon such that ( )fMF swpimmfCC ,,, α= . Since the
data is not completely linear, it makes sense to fit a higher order equation to the data. In
indicial notation:
+⋅⋅+⋅⋅+⋅+⋅= 24
23
32
31, jijijiji immpimmpimmppC ααα
8765 pimmppimmp jiji +⋅+⋅+⋅⋅ αα
Equation 21
Note that the higher the order of the approximation, the more accurate the approximation
will be.
In order to solve for the coefficients pi the system can be solved as follows:
First define the vectors as follows
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
8
8
1
p
pp
PΜ
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⋅⋅⋅
=
1
2
2
3
3
j
i
ji
ji
ji
j
i
imm
immimmimm
imm
A
αααα
α
jiCB ,=
Now the coefficients pi can be solved…
[ ][ ] BAAAP
BAPAABPA
TT
TT
1−===⋅
Equation 22
25
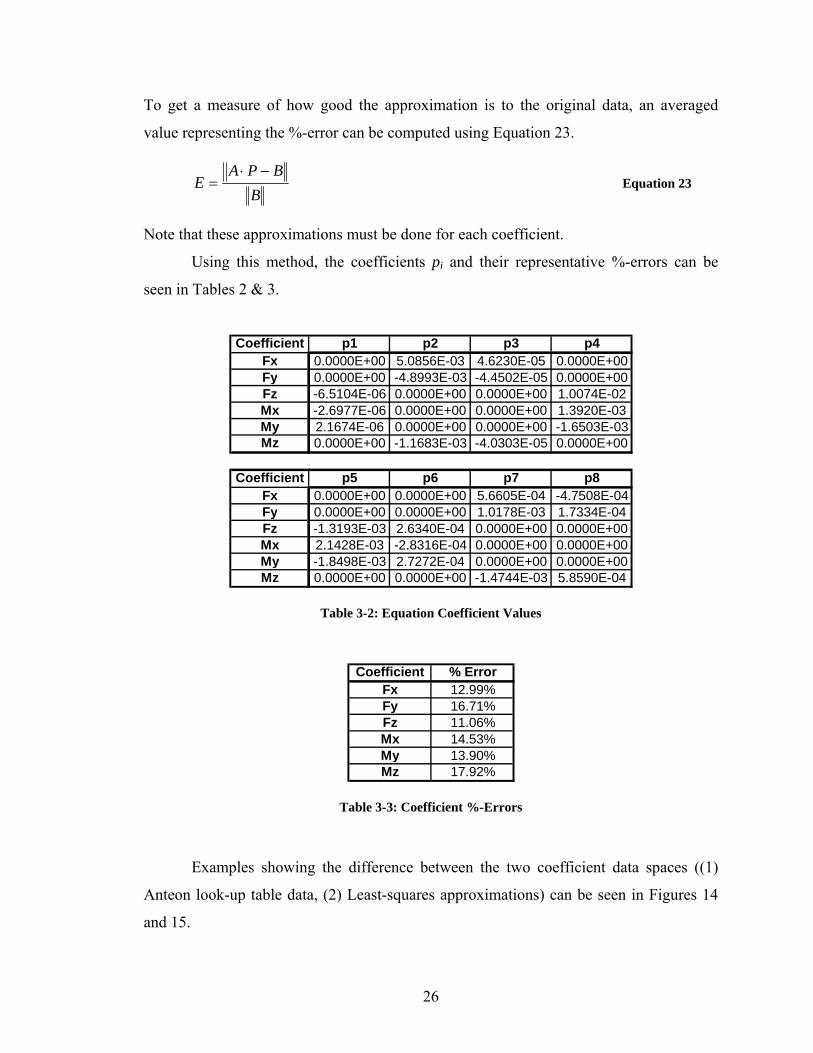
To get a measure of how good the approximation is to the original data, an averaged
value representing the %-error can be computed using Equation 23.
B
BPAE
−⋅= Equation 23
Note that these approximations must be done for each coefficient.
Using this method, the coefficients pi and their representative %-errors can be
seen in Tables 2 & 3.
Coefficient p1 p2 p3 p4
Fx 0.0000E+00 5.0856E-03 4.6230E-05 0.0000E+00Fy 0.0000E+00 -4.8993E-03 -4.4502E-05 0.0000E+00Fz -6.5104E-06 0.0000E+00 0.0000E+00 1.0074E-02Mx -2.6977E-06 0.0000E+00 0.0000E+00 1.3920E-03My 2.1674E-06 0.0000E+00 0.0000E+00 -1.6503E-03Mz 0.0000E+00 -1.1683E-03 -4.0303E-05 0.0000E+00
Coefficient p5 p6 p7 p8Fx 0.0000E+00 0.0000E+00 5.6605E-04 -4.7508E-04Fy 0.0000E+00 0.0000E+00 1.0178E-03 1.7334E-04Fz -1.3193E-03 2.6340E-04 0.0000E+00 0.0000E+00Mx 2.1428E-03 -2.8316E-04 0.0000E+00 0.0000E+00My -1.8498E-03 2.7272E-04 0.0000E+00 0.0000E+00Mz 0.0000E+00 0.0000E+00 -1.4744E-03 5.8590E-04
Table 3-2: Equation Coefficient Values
Coefficient % Error
Fx 12.99%Fy 16.71%Fz 11.06%Mx 14.53%My 13.90%Mz 17.92%
Table 3-3: Coefficient %-Errors
Examples showing the difference between the two coefficient data spaces ((1)
Anteon look-up table data, (2) Least-squares approximations) can be seen in Figures 14
and 15.
26
0.50.6
0.70.8
0.9
-2-1
01
2
-15
-10
-5
0
5
x 10-4
Imm
Fy for Sweep = 45 deg. (Least Squares Fit)
α
F y
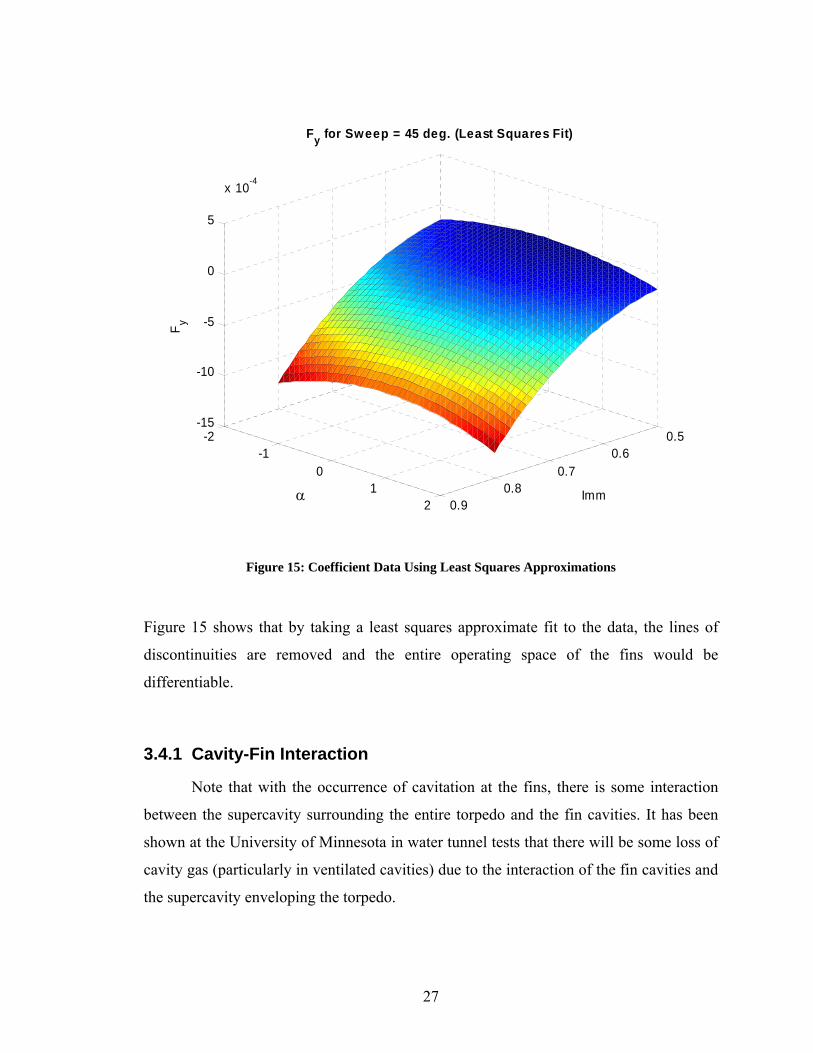
Figure 15: Coefficient Data Using Least Squares Approximations
Figure 15 shows that by taking a least squares approximate fit to the data, the lines of
discontinuities are removed and the entire operating space of the fins would be
differentiable.
3.4.1 Cavity-Fin Interaction
Note that with the occurrence of cavitation at the fins, there is some interaction
between the supercavity surrounding the entire torpedo and the fin cavities. It has been
shown at the University of Minnesota in water tunnel tests that there will be some loss of
cavity gas (particularly in ventilated cavities) due to the interaction of the fin cavities and
the supercavity enveloping the torpedo.
27

Figure 16: Fin and Supercavity Interaction
For simplicity, this interaction is ignored. However, it will have an effect on the
cavitation number and thus the dynamics of the model itself. Further studies will need to
explore this interaction and its effects.
3.4.2 Computation of the Fin Forces and Moments
Before the fin forces and moments are computed, the orientation of the fins have
to be considered. For the model presented here, the fins are arranged in a cruciform
formation as shown in Figure 17.
4
3 η
1
2
h
Figure 17: Cruciform Orientation of Fins (View from Nose)
This orientation is represented by a vector of angles, ,
where the index is associated with the fin number. Note that this is not the only way to
orient the fins and that the following equations used to compute the fin forces and
moments would work for any fin configuration. Fins 1 and 3 are elevators. Depending
]270180900[ oooo=Φ
28

on the case considered, they provide some component of steady lift to support the
afterbody, and would be important to depth changes. Fins 2 and 4 are rudders that
stabilize the vehicle in roll, and are otherwise deflected only during maneuvers.
In addition to angular placement, the location of the fins on the torpedo body
itself is defined by the variables xpiv and rpiv where
xpiv = 0.85 Lbody
rpiv = 0.9 Rbody
These positions define the pivot points of the fins.
Also shown in Figure 17 is the sign convention of the fin lift forces (Fz), the
moments (My), and pitch rotation or each fin. The straight arrows on each fin show the
positive direction of the lift force. This type of convention is needed because the fin
force and moment coefficients computed by Anteon were computed for a general wedge-
type fin. This requires special attention to reference frames when computing the total fin
forces in the body reference frame.
The following steps walk through the computations of the individual fin forces and
moments and the appropriate reference frame conversions used to compute the general
fin forces and moments in the body reference frame.
1. Determine the local centerline values for each fin.
( ) ( )( ) ( )( )( ) ( )( ) (( )iziyiz
iziyiy
cc
cc
finfincen
finfincen
Φ+Φ−= )Φ+Φ=
cossin
sincos
where cfiny , , and are the cavity centerline values at x
cfinzcfinr piv.
2. Find the intersection of the cavity and the local fin.
( ) ( )izriy cenfinR c−= 2
3. Calculate the fin immersion ratio.
29

( ) ( ) ( )( )
( )⎪⎩
⎪⎨
⎧
><<
<=
++−
=
1)(11)(0)(
0)(0
3.0*7.0
iimmiimmiimm
iimmiimm
biyiyr
iimmfin
Rcentip
Equation 24
where bfin is the span of the fin and rtip is the sum of the span and the pivot radius.
4. Calculate the apparent sweep.
( ) ( )( ) ( )( )iiswpiswp f Φ+Φ−= cossin βα Equation 25
5. Calculate the approximate center of effect on the submerged portion of the fin.
( ) ( )( ) ( )( )
( ) ( )( ) ( )( )( ) ( ) ( )( )( ) ( ) ( )( )iiriz
iiriy
iswpiimmbrir
iswpiimmbxix
ff
ff
ffinpivf
ffinpivf
Φ=
Φ=
−+=
−+=
cos
sin
cos2
1
sin2
1
6. Compute the apparent flow angles in the body-fixed frame.
( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )( )222
222
wvu
ipzirxi
wvu
ipyiqxi
xixix
ffinbody
ffinbody
originffin
y
y
++
+−+−=
++
++=
−=
βα
αα
7. Transform the apparent flow angles to the appropriate fin reference frame
(designated as the LSCAV frame in the Anteon code)
( ) ( )( ) ( )( )iiizy bodybodyLSCAV Φ+Φ= sincos ααα
8. Add fin actuator angle to compute final angle of attack of each fin
30

( ) ( ) ( ) ( )( )iswpiiiatk ffinLSCAV cosδα += Equation 26
9. Compute force and moment coefficients from Anteon precomputed data as a
function of imm(i), spwf(i), and atk(i).
10. Add any uncertainty associated with the coefficients10.
11. Dimensionalize the force and moment coefficients.
( )[ ]
[ ] ( )[ ] FixCCCbqM
CCCqF
bwvuq
Tfin
TMMMfinF
TFFFF
finF
zyx
zyx
×+=
=
++=
00
22222
1 ρ
12. Once all the forces and moments are calculated for each fin sum and rotate the
forces and moments into the correct body axis and sum the values
( ) ( )
( ) ( ) ( )( ) ( ) ( )(
( ) ( ) ( )( ) ( ) ( )( )∑
∑
∑
=
=
=
Φ−Φ=
Φ+Φ=
−=
fin
fin
fin
N
iiifin
N
iiifin
N
iifin
iFiFF
iFiFF
FF
1
1
1
cos3sin33
sin3cos22
11
)
))
Equation 27
( ) ( )
( ) ( ) ( )( ) ( ) ((
( ) ( ) ( )( ) ( ) ( )( )∑
∑
∑
=
=
=
Φ−Φ=
Φ+Φ=
−=
fin
fin
fin
N
iiifin
N
iiifin
N
iifin
iMiMM
iMiMM
MM
1
1
1
cos3sin33
sin3cos22
11
Equation 28
Now that the computations of the fin forces and moments have been defined, as
was done for the cavitator forces and moments, the fin forces and moments are shown in
10 System uncertainty is discussed later in the thesis.
31
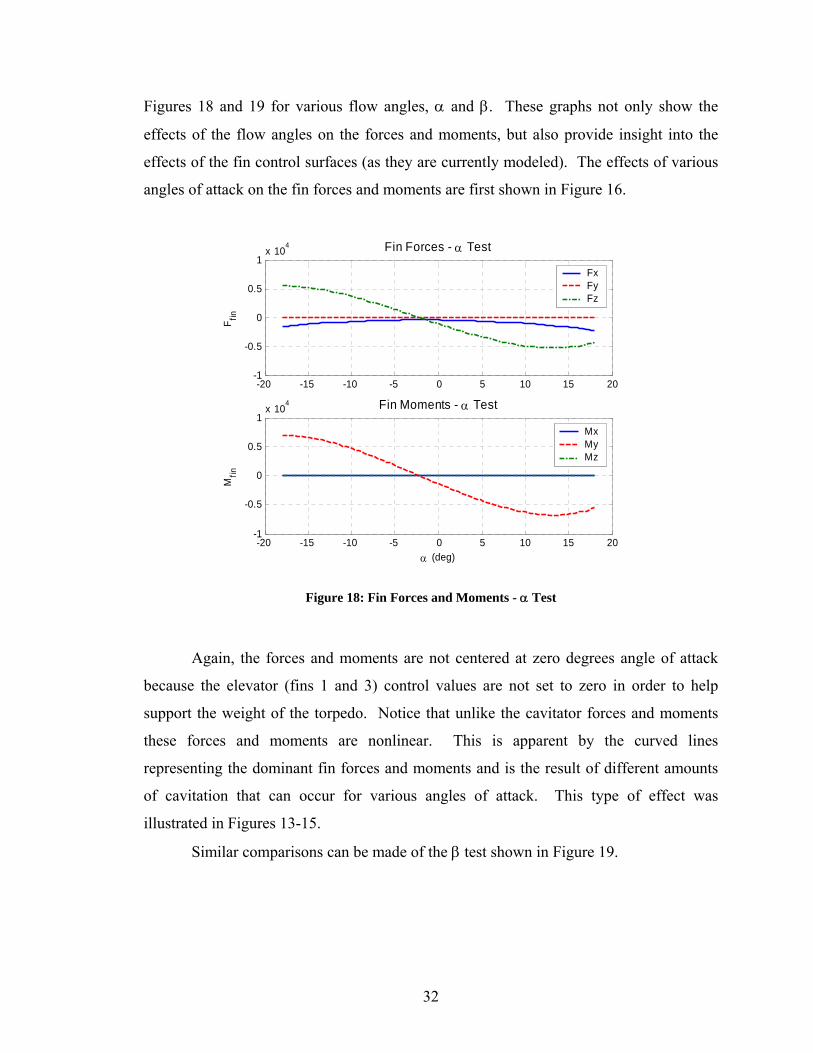
Figures 18 and 19 for various flow angles, α and β. These graphs not only show the
effects of the flow angles on the forces and moments, but also provide insight into the
effects of the fin control surfaces (as they are currently modeled). The effects of various
angles of attack on the fin forces and moments are first shown in Figure 16.
-20 -15 -10 -5 0 5 10 15 20-1
-0.5
0
0.5
1x 10
4
F fin
Fin Forces - α Test
-20 -15 -10 -5 0 5 10 15 20-1
-0.5
0
0.5
1x 10
4
α (deg)
Mfin
Fin Moments - α Test
FxFyFz
MxMyMz
Figure 18: Fin Forces and Moments - α Test
Again, the forces and moments are not centered at zero degrees angle of attack
because the elevator (fins 1 and 3) control values are not set to zero in order to help
support the weight of the torpedo. Notice that unlike the cavitator forces and moments
these forces and moments are nonlinear. This is apparent by the curved lines
representing the dominant fin forces and moments and is the result of different amounts
of cavitation that can occur for various angles of attack. This type of effect was
illustrated in Figures 13-15.
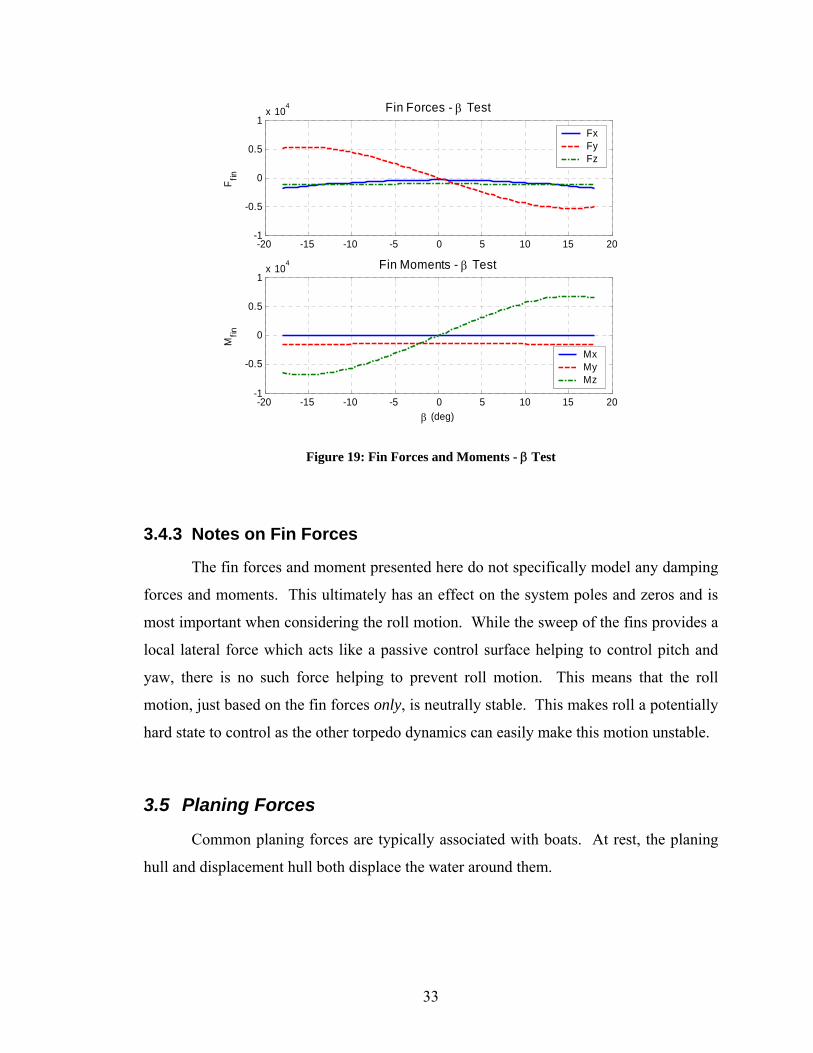
Similar comparisons can be made of the β test shown in Figure 19.
32
-20 -15 -10 -5 0 5 10 15 20-1
-0.5
0
0.5
1x 10
4
F fin
Fin Forces - β Test
-20 -15 -10 -5 0 5 10 15 20-1
-0.5
0
0.5
1x 10
4
β (deg)
Mfin
Fin Moments - β Test
FxFyFz
MxMyMz
Figure 19: Fin Forces and Moments - β Test
3.4.3 Notes on Fin Forces
The fin forces and moment presented here do not specifically model any damping
forces and moments. This ultimately has an effect on the system poles and zeros and is
most important when considering the roll motion. While the sweep of the fins provides a
local lateral force which acts like a passive control surface helping to control pitch and
yaw, there is no such force helping to prevent roll motion. This means that the roll
motion, just based on the fin forces only, is neutrally stable. This makes roll a potentially
hard state to control as the other torpedo dynamics can easily make this motion unstable.
3.5 Planing Forces
Common planing forces are typically associated with boats. At rest, the planing
hull and displacement hull both displace the water around them.
33
Figure 20: Displacement Hull
In this case, the planing hull reacts nearly the same as a displacement hull when it
initially gets underway – it takes considerable power to produce a small increase in
speed. But at a certain point, external forces acting on the shape cause an interesting
effect, the hull is lifted up onto the surface of the water.
Figure 21: Planing Hull
The planing hull skims along the surface of the water whereas the displacement hull
always forces water around it. This “skimming” along the water’s surface is called
planing. Once “on top,” the power/speed ratio is considerably altered – very little power
is needed to get a large increase in speed. These types of forces occur with
supercavitating torpedo schemes when the torpedo attitude is larger than the allowable
space defined by the cavity shape and dimensions. However, unlike the boat application,
these forces are not desirable for the reason that, while drag may be reduced as compared
to a fully-wetted vehicle, the planing vehicle will produce more drag than the vehicle
entirely enveloped in a supercavity.
Two possible schemes of a planing supercavitating torpedo are shown in Figure
22 (Savchenko et al 1998, Savchenko et al 1999). [5]
34
Figure 22: Possible Supercavitating Flow Schemes with Planing Forces
In the two possible motion schemes the object’s weight G is compensated by two
hydrodynamic forces, 21 YYG += , where Y1 is the lift on the cavitator and Y2 is the lift on
the planing part of the hull. The top part of Figure 22 represents a type of steady-state
planing force that is being used to help support the weight of the body. The bottom part
displays a situation where the body is bouncing around the inside of the cavity.
Upon further investigation into the torpedo model’s behavior, it is observed that
the planing forces represent a force with a deadzone, much like the one shown in mass-
spring example in Figure 23:
(dampener)
M
(Spring)
Figure 23: Spring-Mass 2nd Order System with Dead-Zone
Here we can see that the spring force will only exist when the end of the spring
hits one of the edges of the mass. The area between the two edges of the mass is the
35
deadzone. This deadzone is similar to the inside of the cavity and the mass edges are
similar to the cavity boundaries (dimensions).
What this means is that a linearized system would not be representative of all the
possible dynamics. In other words, when planing forces exist, the torpedo is actually a
different system. For this spring mass example shown above, there would have to be
three linear models to represent the three systems: (1) when the spring is not hitting the
edge of the mass, (2) when the spring hits the bottom edge, and (3) when the spring hits
the top edge. A similar process must be applied to the torpedo model for when the
torpedo is planing and when it is not. There are numerous studies in how to handle these
types of nonlinearities in control law design if one decides that it is possible to control the
torpedo (given the very high bandwidth) in the presence of strong and frequent planing
forces.
Planing of a slender afterbody on a supercavitating boundary also distorts the flow
(Logvinovich, 1980). The pressure increase on the wetted portion of the section is
associated with the deflection of the streamlines toward the cavity region. This results in
a jet of fluid into the cavity on each side of the body similar to the spray jet observed
along planing hulls. Both types of secondary flows – due to the fins and to the afterbody
planing – have been ignored in the current investigation, although the theory used to
estimate the afterbody planing forces accounts for the lowest-order effect of the spray jet.
[1]
Planing forces acting on the blast tube used for propulsion is assumed to be
negligible for reasons that this aft part of the cavity will, in reality, have a large void
fraction and so the hydrodynamic forces acting on the blast tube would be small. Further
studies have been done on the afterbody cavity dynamics by Travis Schauer at the
University of Minnesota and more information regarding these void fractions can be seen
in his Master’s thesis.
The importance of cavity distortion in high turn rates is apparent in Figure 24
which represents results for an extreme turn (in this case, a 5-g turn, which is probably
impractical, but is illustrative for the cavity-body interactions important to the dynamics).
36
Z X
Y
X
Y
Z
Figure 24: Cavity Behavior in an Extreme Turn [1]
The submergence of the afterbody into the flow is clear in this diagram. This is a
cause of nonlinear forces acting on the torpedo. First, as the cavity distorts from a
nominally axisymmetric configuration, the immersion of the fins into the ambient liquid
outside the cavity becomes asymmetric. Therefore, the couple associated with symmetric
or anti-symmetric fin forces and moments will be associated with a nonlinear system
response. Secondly, a supercavitating system designed for a nominally axisymmetric
cavity (or even one designed for cavity tail-up) will be subject to nonlinear forces
associated with afterbody planing.
3.5.1 Computation of the Planing Forces
The planing forces are computed using an extension of Wagner planing theory
developed by Logvinivich (for example, 1980). What this means is that the planing
region of the hull can be approximated as a wedge-type immersion as presented in Figure
25.
37

Figure 25: Sketch of Planing Region of Torpedo
where
• a = Lplane = xentry - xtransom
• o = hplane = htransom
• α = αplane = π + atan2(hplane,Lplane)
• θ = θplane = 0.25(αentry+3αtransom); a conical average weighted to the transom
• Δp = Rcavity at transom – Rhull at transom
and correspond to the notation used in Figure 25.
3.5.1.1 Pressure Forces and Moments
The drag force associate with planing has two components, pressure drag (form
drag) and skin friction drag (viscous drag). Most of the drag is typically caused by
pressure drag. The pressure drag is caused by a combination of the build of pressure in
front of the submerged portion of the body and the decrease in pressure behind.
The pressure force normal to the inclined longitudinal axis of the cylindrical hull
is then given by Equation 29
( )( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛
Δ+
Δ−
+
+=
2
22cp 1
2cossin
pplane
p
planeh
planehplaneplane hhr
hrurF ααρπ
Equation 29
38

where rh is the hull radius (assumed to be constant over the planing region), rc, αplane, and
are (respectively) the cavity radius (at transom), the angle of attack between the
longitudinal axes of the body and the cavity, and the difference between the cavity and
hull radii (all averaged along the planing region); and is the immersion depth at the
transom measured normal to the cavity centerline.
Δ
0h
Similarly, the moment of pressure forces about the transom can be expressed as
pplane
plane
plane
plane
hh
hrhr
urMΔ++
+=
2
h
hplane
222cp 2
cos αρπ Equation 30
3.5.1.2 Skin Friction Forces
The skin friction forces, caused by the viscosity of water, were computed using
the following set of equations [1]:
71
031.0
2
⎟⎟⎠
⎞⎜⎜⎝
⎛=
Δ=
Δ=
νplane
d
planeph
s
p
planec
uLC
hr
u
hu
( )[ ]+−+Δ
= cccplane
phw uuurS arctan1
tan4 2
α
( )[ ]221
212
3
1arcsintan2 ssss
planep
h uuuur
−+−Δ α
dwplanef CSuF αρ 2221 cos= Equation 31
39

where u is the forward velocity state and the moments are assumed to be negligible.
3.5.1.3 Added Mass and Impact Forces
The extra terms that are now added to the planing force computation is the
unsteady force which is proportional to the acceleration and the impact force which is
proportional to the impact speed and the speed of sound in water. The impact force is
important for the case when the hull of the torpedo hits the surface of the cavity.
The generic forces due to acceleration and impact are represented as
Equation 32 amCF addedaonaccelerati =
Equation 33 pwimpactiimpact VACmCF =
where C is the speed of sound in water, a and V are the acceleration and velocities of the
center of mass of the wetted wedge (computed using the norm of the q and r components
of the state-space derivative and state-space, respectively), Apw is the projected area of the
surface area of the wetted wedge, and Ca and Ci are coefficients for the acceleration and
impact forces respectively and are yet to be determined through CFD analysis. Currently,
an upper limit based on a fully wetted cylindrical body, the values of Ca and Ci are 1 and
½, respectively. madded and mimpact are related to the geometry. For a noncavitating sphere
the added mass is equal to half the displaced water, but for a cavitating body, there is no
such compact result. For now, a crude approximation is to set the added mass equal to the
cavity volume and the impact mass to the mass of the displaced water by the impacting
hull.
3.5.1.4 Total Planing Forces and Moments
The total planing forces and moments then become
40
( )( ) ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++++−=
planeimpactonacceleratip
planeimpactonacceleratip
f
plane
FFFFFF
FF
θθ
sincos Equation 34
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡×+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
00
cossin0 ,wedgecg
plane
cp
cpplane
xF
MMM
θθ Equation 35
3.5.2 Effects of Planing
The magnitude of the forces are large (on the order of 6000 N!) and occur at
dominating frequencies11 of about 10 Hz, 25 Hz, and 50 Hz as seen in Figure 26. Keep
in mind that these frequencies and forces are specific to the torpedo geometry described
above as well as the flight condition and may be different for other torpedo models. Due
to the large forces and the high frequency (with dominant modes as high as 50 Hz) of
these forces, not to mention the large increase in drag associated with planing, planing
forces are considered undesirable and are not required for the overall stability of the
torpedo as long as there are other control surfaces such as fins to help support the weight.
In addition, the model becomes a switching model with the cavity dimensions at
the transom of the torpedo representing the dead-zone region. Since the dominant
frequencies of the planing forces are about 10 Hz, 25 Hz, and 50 Hz it would take
significant control effort as well as very fast and expensive actuators and sensors to
actively control the torpedo at this high of a bandwidth. This is why this thesis treats the
planing forces as a general disturbance (which is a function of the states) in the nonlinear
model which means that these forces are not used to compute the linear model used for
control law design. Rather, they will be used to help specify the constraints on the
turning accelerations for the horizontal trajectories considered in order to minimize the
allowable planing forces. In other words, allowable trajectories will be based on the
steady-state turn rate required to produce planing forces. 11 These frequencies are based on the original model developed by Anteon for fin and planing force supported, straight-and-level flight at a speed of 77 m/s.
41
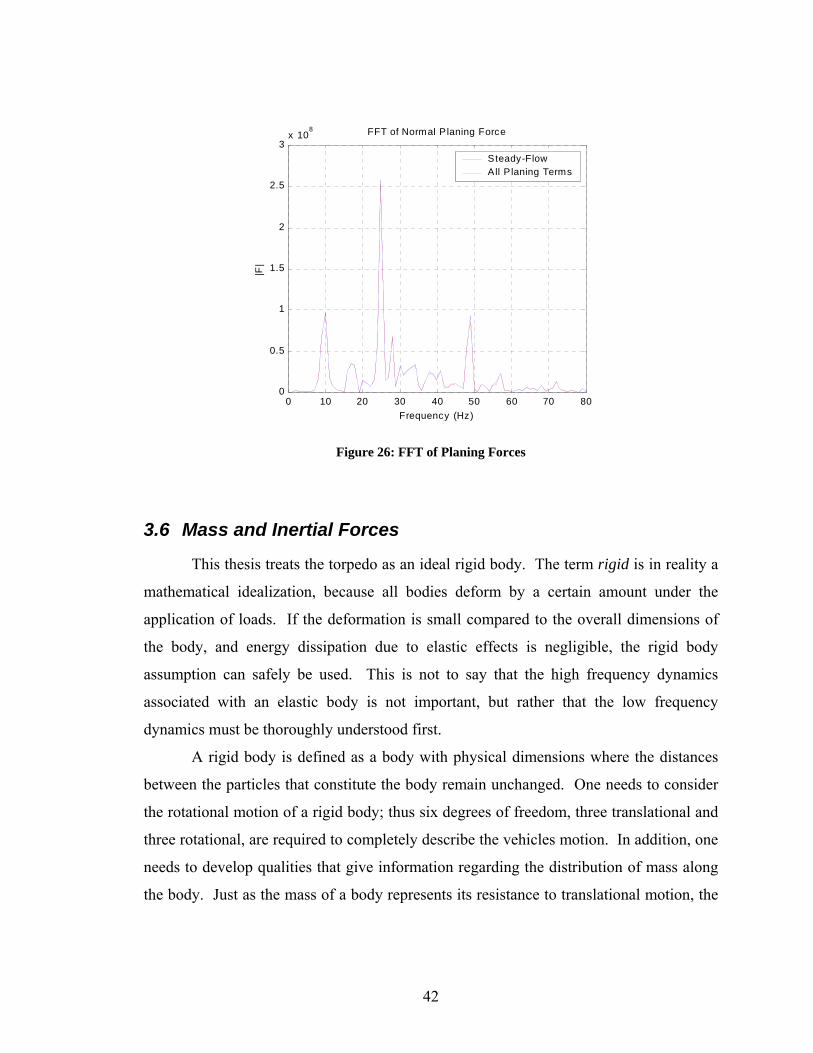
0 10 20 30 40 50 60 70 80
0
0.5
1
1.5
2
2.5
3x 10
8
Frequency (Hz)
|F|
FFT of Normal Planing Force
Steady-Flow A ll P laning Terms
Figure 26: FFT of Planing Forces
3.6 Mass and Inertial Forces
This thesis treats the torpedo as an ideal rigid body. The term rigid is in reality a
mathematical idealization, because all bodies deform by a certain amount under the
application of loads. If the deformation is small compared to the overall dimensions of
the body, and energy dissipation due to elastic effects is negligible, the rigid body
assumption can safely be used. This is not to say that the high frequency dynamics
associated with an elastic body is not important, but rather that the low frequency
dynamics must be thoroughly understood first.
A rigid body is defined as a body with physical dimensions where the distances
between the particles that constitute the body remain unchanged. One needs to consider
the rotational motion of a rigid body; thus six degrees of freedom, three translational and
three rotational, are required to completely describe the vehicles motion. In addition, one
needs to develop qualities that give information regarding the distribution of mass along
the body. Just as the mass of a body represents its resistance to translational motion, the
42

distribution of the mass about a certain axis represents the body’s resistance to rotational
motion about that axis.
3.6.1 Center of Mass
A rigid body can be considered as a collection of particles in which the number of
particles approaches infinity and in which the distances between the individual masses
remain the same. As N approaches infinity, each particle can be treated as a differential
mass element dm and the mass of the body is computed as an integral over the body
dimensions
∫=body
dmm
where the nominal mass is set at 175.7 Kg for this investigation.
The location of the center of mass can then be defined as
∫ ⋅=body
G dmrm
r 1
where r is the vector from the origin to the differential element dm. Since the torpedo is
symmetric about the ξ-axis, the only nonzero element of rG is the ξ-component and will
be defined as xcg and is measured in units aft of the cavitator.
The center of mass is a very important quantity, as its use simplifies the analysis
of bodies considerably. One has to perform the integrations above in order to find the
center of mass. These integrals in general are triple integrals, but in order to simplify the
problem the geometry of the torpedo is considered and uniform density is assumed. As is
shown in Figure 27, the torpedo geometry can be broken into four main sections: (1) the
cavitator/pivot joints, (2) nose cone, (3) body cylinder, and (4) the blast tube. Since it is
reasonable to consider most of the mass to be contained in the nose cone and the
cylindrical body, we just need to know the simple geometry of those sections.
43
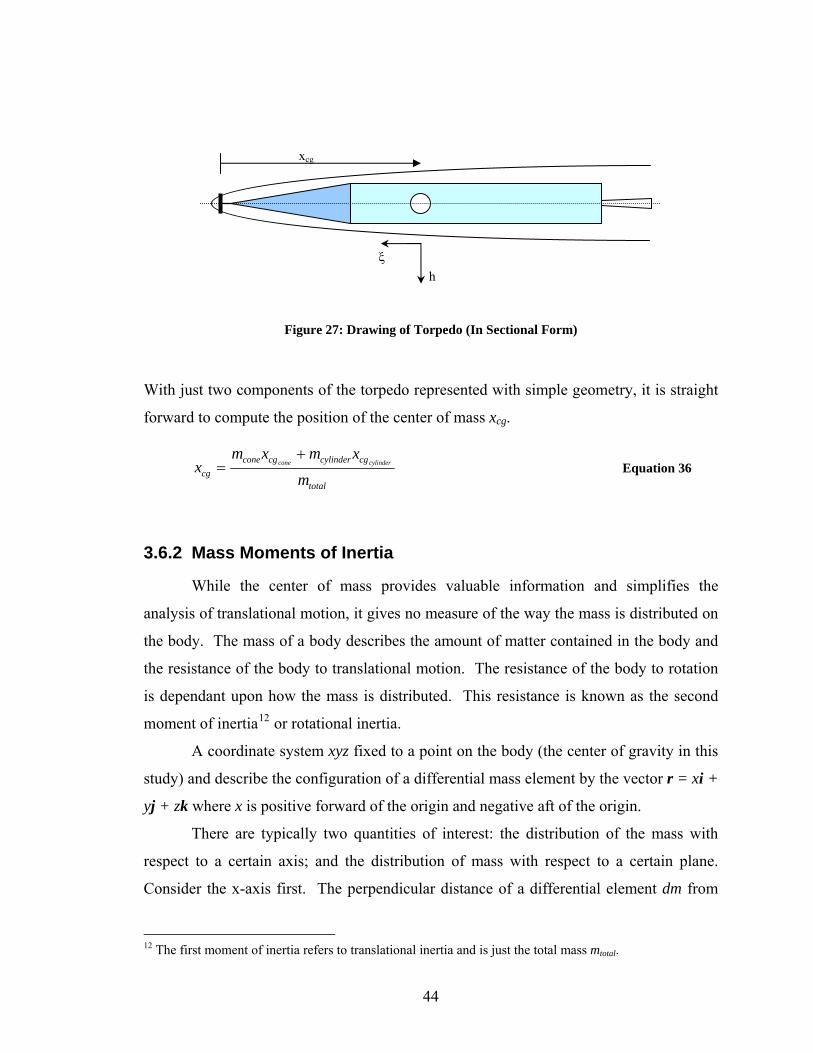
xcg
ξ h
Figure 27: Drawing of Torpedo (In Sectional Form)
With just two components of the torpedo represented with simple geometry, it is straight
forward to compute the position of the center of mass xcg.
total
cgcylindercgconecg m
xmxmx cylindercone
+= Equation 36
3.6.2 Mass Moments of Inertia
While the center of mass provides valuable information and simplifies the
analysis of translational motion, it gives no measure of the way the mass is distributed on
the body. The mass of a body describes the amount of matter contained in the body and
the resistance of the body to translational motion. The resistance of the body to rotation
is dependant upon how the mass is distributed. This resistance is known as the second
moment of inertia12 or rotational inertia.
A coordinate system xyz fixed to a point on the body (the center of gravity in this
study) and describe the configuration of a differential mass element by the vector r = xi +
yj + zk where x is positive forward of the origin and negative aft of the origin.
There are typically two quantities of interest: the distribution of the mass with
respect to a certain axis; and the distribution of mass with respect to a certain plane.
Consider the x-axis first. The perpendicular distance of a differential element dm from
12 The first moment of inertia refers to translational inertia and is just the total mass mtotal.
44

the x-axis is 22 zyRx += . The mass moment of inertia about the x-axis is then
computed as
dmzydmRJbodybody
xxx ⋅+=⋅= ∫∫ 222 Equation 37
In a similar fashion, the mass moments of inertia about the y and z axes are defined as
Equation 38 dmzxdmRJbodybody
yyy ⋅+=⋅= ∫∫ 222
Equation 39 dmyxdmRJbodybody
zzz ⋅+=⋅= ∫∫ 222
One quick observation is that the mass moment of inertia of a body about a
certain axis becomes larger as the axis is selected further away from the body. This is an
indication that mass moments of inertia will be useful in describing the rotational motion
of a body.
Consider the distribution of the mass with respect to the xy, xz, and yz planes;
these produce the products of inertia.
Equation 40 ∫ ⋅=body
xy dmxyJ
Equation 41 ∫ ⋅=body
yz dmyzJ
Equation 42 ∫ ⋅=body
xz dmxzJ
It is clear that Jxy=Jyx, and so forth. In general, the products of inertia do not contribute
too much to the physical description of the mass distribution, unless there are certain
symmetry properties with respect to the coordinate axes. Since the fins are oriented in
the cross formation and line up with the principal axes, the products of inertia are zero
unless an origin is chosen to be something other than the center of mass.
The moments and products of inertia form the so called inertia matrix, denoted by
[J] and is defined as
45

Equation 43 [ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
=
zzyzxz
yzyyxy
xzxyxx
JJJJJJJJJ
J
The diagonal elements of [J] are the principal moments of inertia and they are all positive
quantities, each obtained by integration of a positive integrand.
The mass, center of mass, and the inertia matrix of a rigid body specify what are
called the internal properties is the body completely. For an elastic body, one needs to
know measures of the resistance of the body to deformation, in addition to the internal
properties.
To compute the components of the inertia matrix, the simple torpedo geometry
can be taken advantage of again by use of the parallel axis theorem. In other words, the
moments of inertia are computed for the cone and the cylinder separately taking into
consideration the distance from the section’s center of gravity to the origin and then
performing the following calculation (parallel axis theorem).
Equation 44 ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+−−−+−−−+
+=22
22
22
yxzyzx
zyzxyx
zxyxzy
iGB
dddddddddddddddddd
mJJii
where JG are the moments of inertia of the individual section, mi is the mass of the
section, and dx, dy, and dz represent the distances to the origin in the ξ-, η-, and h-axes.
The total inertia is then computed by summing the two sections of inertia.
3.7 Putting it all Together
A variety of methods exist for writing equations of motion (EOM) for dynamical
systems. One of the most common is the Newton-Euler formulation. From a historical
perspective, Newton developed his laws for the motion of rigid bodies, even though we
first study them within the context of particles. Defining the inertia force acting on the
body as –macg, Newton’s second law can be described as the inertia force being equal and
opposite to the applied forces. The law governing rotational motion was formally stated
by Euler in 1775. The law states that the rate of change of the angular momentum about
46

the center of mass of a rigid body is equal to the sum of all applied moments about the
center of mass. [8]
Using this methodology, the system dynamics about the center of gravity in an
inertial coordinate system are computed as shown in the following matrix notation form
of the EOM.
cgcgcgcgcg M
FJ
mIJ
mI⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
−=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
∑∑××
ων
ωω
ων
00
~00~
00 3333
&&
Equation 45
where
[ ][ ]T
T
rqp
wvu
=
=
ω
ν
are the linear and angular velocity vectors, respectively, F and M are the external forces
and moments acting about the center of gravity, and the tilde (~) character is used to
represent the cross product of a vector in matrix form. The inertia about the center of
gravity is defined as Jcg.
The tilde character is used as follows:
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=→=
00
0~
abac
bccba T κκ
and is the same as using the cross product as is illustrated below.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡×⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
nml
abac
bc
nml
cba
00
0
Note that the tilde matrix representation is a skew-symmetric matrix.
It is often convenient to write the EOM in short-hand notation with the help of the
tilde operation described above. Defining a mass matrix, M, and angular rate matrix, Ω,
such that
47

⎥⎦
⎤⎢⎣
⎡−
−=Ω
⎥⎦
⎤⎢⎣
⎡= ×
ωω
~00~
0033
cgJmI
M
The equations of motion about the center of gravity (Equation 45) are then written as
cgcgcg M
FMM ⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡Ω=⎥
⎦
⎤⎢⎣
⎡
∑∑
ων
ων&&
Equation 46
3.7.1 EOM about an Arbitrary Point
If it is desired to compute the EOM about an arbitrary point other than the center
of mass (such as the cavitator pivot point as is considered by Anteon), appropriate
transformations must be added to these system equations of motion. If a vector defining
the distance to the arbitrary point from the center of mass is defined as
[ ]Tzyx rrrr =
where distances are positive in the positive directions of the coordinate system, the
velocity components of the system are transformed to the new coordinate system. In
other words, we substitute the velocity components about the center of gravity with the
transformed values such that
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
×
×
ων
ων
ων
RIrI
cg 33
33
0
~ Equation 47
where R is the origin transformation matrix. Substituting and making sure that the forces
and moments are in the correct reference frames, the EOM become
cg
TTT
MF
RMRRMRR ⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡Ω=⎥
⎦
⎤⎢⎣
⎡
∑∑
ων
ων&&
Equation 48
48
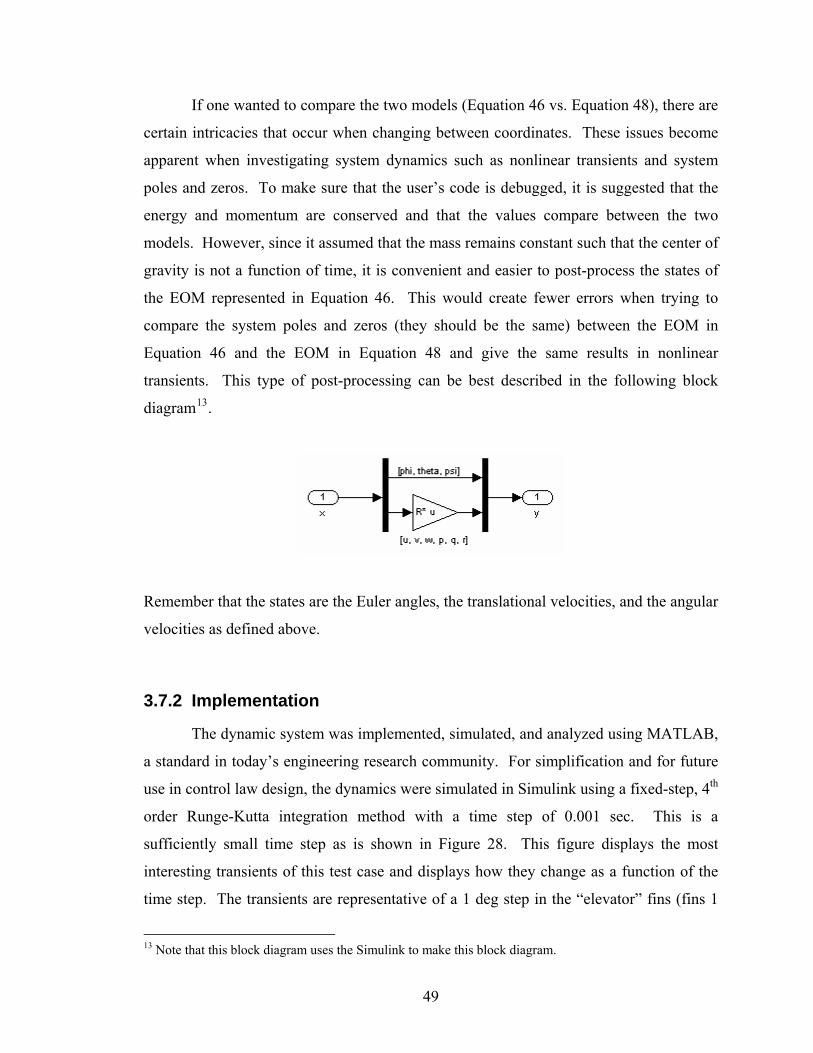
If one wanted to compare the two models (Equation 46 vs. Equation 48), there are
certain intricacies that occur when changing between coordinates. These issues become
apparent when investigating system dynamics such as nonlinear transients and system
poles and zeros. To make sure that the user’s code is debugged, it is suggested that the
energy and momentum are conserved and that the values compare between the two
models. However, since it assumed that the mass remains constant such that the center of
gravity is not a function of time, it is convenient and easier to post-process the states of
the EOM represented in Equation 46. This would create fewer errors when trying to
compare the system poles and zeros (they should be the same) between the EOM in
Equation 46 and the EOM in Equation 48 and give the same results in nonlinear
transients. This type of post-processing can be best described in the following block
diagram13.
Remember that the states are the Euler angles, the translational velocities, and the angular
velocities as defined above.
3.7.2 Implementation
The dynamic system was implemented, simulated, and analyzed using MATLAB,
a standard in today’s engineering research community. For simplification and for future
use in control law design, the dynamics were simulated in Simulink using a fixed-step, 4th
order Runge-Kutta integration method with a time step of 0.001 sec. This is a
sufficiently small time step as is shown in Figure 28. This figure displays the most
interesting transients of this test case and displays how they change as a function of the
time step. The transients are representative of a 1 deg step in the “elevator” fins (fins 1
13 Note that this block diagram uses the Simulink to make this block diagram.
49
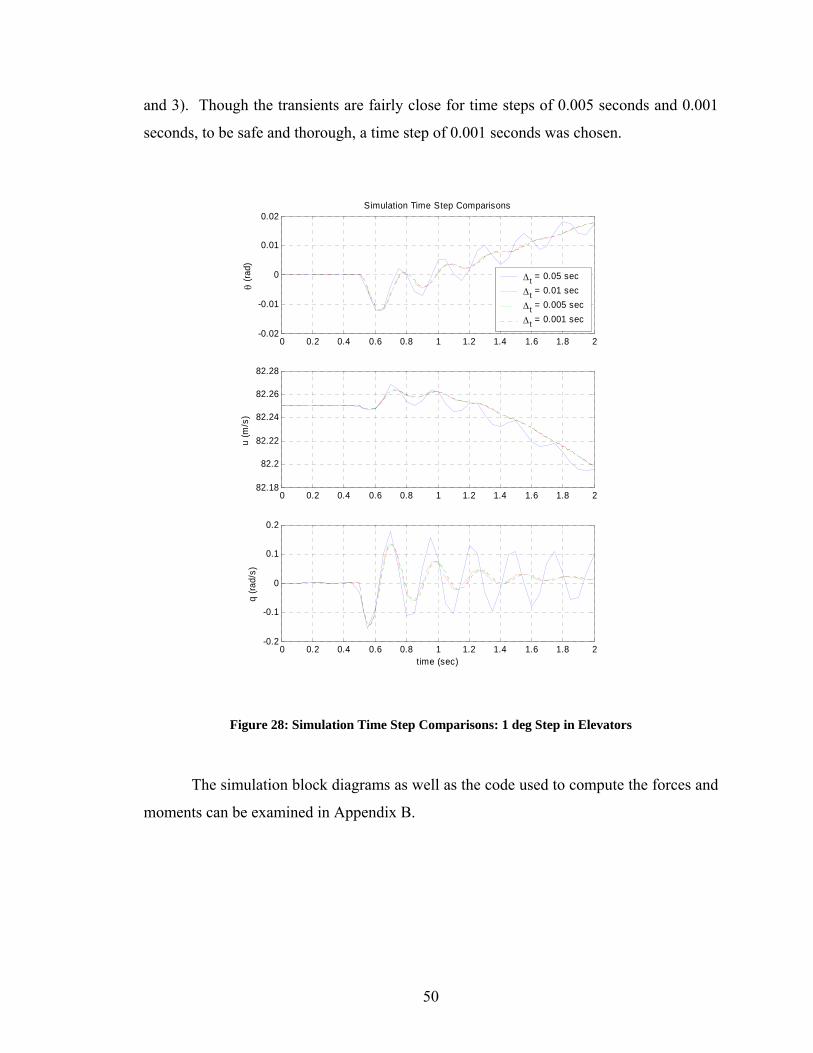
and 3). Though the transients are fairly close for time steps of 0.005 seconds and 0.001
seconds, to be safe and thorough, a time step of 0.001 seconds was chosen.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.02
-0.01
0
0.01
0.02
θ (ra
d)
Simulation Time Step Comparisons
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 282.18
82.2
82.22
82.24
82.26
82.28
u (m
/s)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.2
-0.1
0
0.1
0.2
q (ra
d/s)
time (sec)
Δ t = 0.05 secΔ t = 0.01 secΔ t = 0.005 secΔ t = 0.001 sec
Figure 28: Simulation Time Step Comparisons: 1 deg Step in Elevators
The simulation block diagrams as well as the code used to compute the forces and
moments can be examined in Appendix B.
50
4 Linearization A classical dilemma in modeling physical systems is the trade-off between model
accuracy and tractability. While sophisticated models might provide accurate
descriptions of system behavior, the resulting analysis can be considerably more
complicated. Simpler models, on the other hand, may make analysis easier and offer
more insight, but might neglect important system behaviors. The required fidelity of a
model depends on the intended utility. For example, one may use a very simplified
model for the sake of control design, but then use a sophisticated model to simulate the
overall control system.
One instance where this dilemma manifests itself is the use of linear versus
nonlinear models. Nonlinearities occur in most physical systems. Simple examples
include saturations, rate limiters, dead-zones, and backlash. Further examples include
inherently nonlinear behavior of systems such as chemical process plants, aircraft, and
the torpedo model under inspection. However, methods for analysis and control design
are considerably more available and developed for linear systems than nonlinear systems.
One approach is to directly address the nonlinear behavior of such systems, and
nonlinear control design remains a topic of active research. An alternative method is to
linearize the system dynamics; i.e. to approximate the nonlinear model by a linear one.
Some immediate consequences are that (1) the linear model can only give a local
description of the system behavior and (2) some of the intricacies of the system behavior
may be completely neglected – even locally. In some cases, these consequences are
tolerable, and one may then employ methods for linear systems.
Recall that the main reason for continuing to understand and further the
development of the torpedo’s dynamic model (rather than diving into control law design)
is because there is an issue with the previous model developed by Kirschner et. al; that is
that the stable nonlinear transients did not match the unstable linear description of the
model. This means that it is probable that some of the model intricacies were not being
captured by the linearization process. The following provides detailed description of the
process of linearization and situations when this process fails in a general form.
51

4.1 General Linearization Procedures and Information
The goal of linearization is to provide insight into nonlinear system behavior
about an equilibrium point and to give the engineer some useful tools for attacking
certain classes of nonlinear problems. Many systems with mild, sufficiently smooth
nonlinearities can be treated by using a linear approximate model, obtained by linearizing
about a known nominal solution or operating point. Most control design is based on
behavior in the vicinity of an “operating point.” Many aircraft, rocket, and spacecraft
control systems have been successfully designed using linear behavior in the
neighborhood of a nominal trajectory.
Consider the general time-invariant nonlinear state variable mode of Equations 49
and 50:
Equation 49 ( Δ= ,xfx& )
) Equation 50 ( Δ= ,xgy
where x is the state vector, Δ is the input vector, and y is the output vector. Suppose that
a nominal solution xn, Δn, and yn, such as an equilibrium point, is known. The difference
between the nominal vector functions and some slightly perturbed functions x, Δ, and y
can be defined by
n
n
n
yyy
xxx
−=Δ−Δ=Δ
−=
δδδ
Then Equations 49 and 50 can be written as
( )Δ+Δ+=+ δδδ nnn xxfxx ,&&
( ) tohfxxfUxf
nnnn .., +Δ⎥⎦
⎤⎢⎣⎡Δ∂∂
+⎥⎦⎤
⎢⎣⎡∂∂
+= δδ Equation 51
( )UUxxgyy nnn δδδ ++=+ ,
52

( ) tohgxxgUyg
nnnn .., +Δ⎥⎦
⎤⎢⎣⎡Δ∂∂
+⎥⎦⎤
⎢⎣⎡∂∂
+= δδ Equation 52
where []n means that the derivatives, the Jacobians, are evaluated on the nominal
solutions. Since the nominal solutions satisfy Equations 49 and 50, the first terms in the
preceding Taylor’s series expansion cancel.
One other condition must also hold. For sufficiently small xδ , Δδ , and
yδ perturbations, the higher-order terms must approach zero as x approaches xn, that is:
0...
suplim0
=≥→ x
tohtxx n
Equation 53
Since these higher-order terms can be neglected, this leaves the linear time-invarient
(LTI) equations
Δ⎥⎦⎤
⎢⎣⎡Δ∂∂
+⎥⎦⎤
⎢⎣⎡∂∂
=
Δ⎥⎦⎤
⎢⎣⎡Δ∂∂
+⎥⎦⎤
⎢⎣⎡∂∂
=
δδδ
δδδ
nn
nn
gxxgy
fxxfx&
Equation 54
which is equal to
Equation 55 Δ+=Δ+=
DCxyBAxx&
when (xn, Δn) is equal to (0,0) and the matrices A, B, C, and D are the respective
Jacobians.
4.1.1 Limitations of Linearization
There are a couple of nonlinearities that do not lend themselves to linearization-
based analysis. Consider the system
Equation 56 )(Δ+= BNAxx&
This system represents linear dynamics where the input u first passes through a
nonlinearity, N. Some common nonlinearities are:
53

saturation14:
Equation 57 ⎪⎩
⎪⎨
⎧
−≤Δ−≤Δ≤−Δ
≥Δ=Δ
1111
11)(N
deadzone:
Equation 58 ⎪⎩
⎪⎨
⎧
−≤Δ+Δ≤Δ≤−
≥Δ−Δ=Δ
11110
11)(N
and relay:
Equation 59 ⎩⎨⎧
<Δ−>Δ
=Δ0101
)(N
Other nonlinearities include backlash and hysteresis. All of these nonlinearities result in
a failure in linearization-based analysis because the linearization completely removes the
intricacies that the nonlinearities cause. i.e. N(Δ) is not differentiable (the slope is not
smooth).
5 Flight Envelope In order to define the flight envelope, the constant cavitation number of 0.029
must be considered. Given the definition of σ in Equation 1 the velocity needed to
maintain this cavitation number can be solved providing we know something about the
freestream pressure, cavity pressure, and water density. If the freestream pressure is
assumed to be about 101325 Pa and the cavity pressure is assumed to be water vapor
pressure at a temperature of 41o F (871.928 Pa) and a density of 1024 kg/m3, the velocity
required to maintain the cavitation number of 0.029 would be about 82.25 m/s. Since the
temperature of the water and operating depth (assumed to be about ten meters) greatly
affect the density and pressure, the velocity value is allowed to vary by 10% of the
nominal value. This gives a velocity operating range of about V = [74,90] m/s. Note that
14 Note that from the definition of Equation 51 that this is only true when the Δ has hit a saturation point.
54
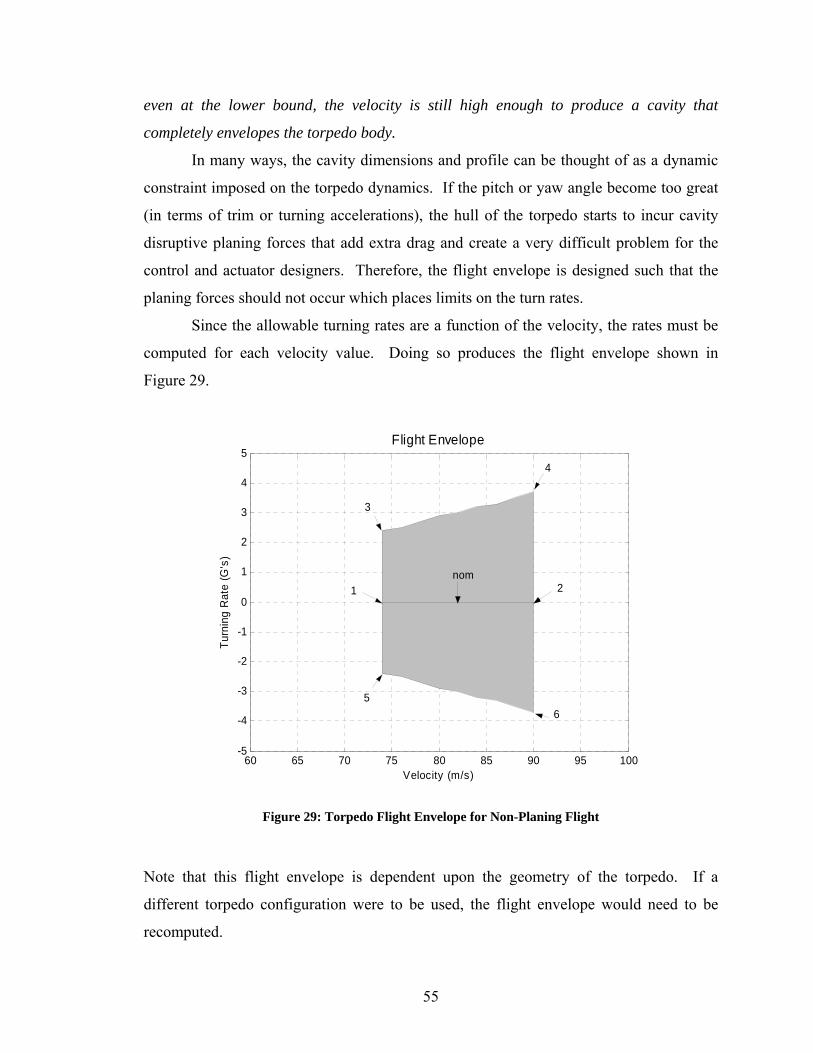
even at the lower bound, the velocity is still high enough to produce a cavity that
completely envelopes the torpedo body.
In many ways, the cavity dimensions and profile can be thought of as a dynamic
constraint imposed on the torpedo dynamics. If the pitch or yaw angle become too great
(in terms of trim or turning accelerations), the hull of the torpedo starts to incur cavity
disruptive planing forces that add extra drag and create a very difficult problem for the
control and actuator designers. Therefore, the flight envelope is designed such that the
planing forces should not occur which places limits on the turn rates.
Since the allowable turning rates are a function of the velocity, the rates must be
computed for each velocity value. Doing so produces the flight envelope shown in
Figure 29.
60 65 70 75 80 85 90 95 100-5
-4
-3
-2
-1
0
1
2
3
4
5
Velocity (m/s)
Turn
ing
Rat
e (G
's)
Flight Envelope
nom
3
4
1 2
6 5
Figure 29: Torpedo Flight Envelope for Non-Planing Flight
Note that this flight envelope is dependent upon the geometry of the torpedo. If a
different torpedo configuration were to be used, the flight envelope would need to be
recomputed.
55
In order to fully understand the torpedo model, several linear models of the open-
loop torpedo model for various trim conditions should be computed and analyzed. In
order to get a representation of the full flight envelope, a linear model should be taken for
the nominal model (V = 82.25 m/s, turning acceleration = 0 g’s) as well as six other trim
conditions indicated in Figure 29. What’s more important is that since the controller can
typically only be designed with one nominal model, it is important to test the closed-loop
system with all trim conditions in order to make sure that the controller performs as
intended for all possible flight conditions.
6 Stability and System Poles One of the most important characteristics of both nonlinear and linear systems is
its stability. For completeness and in order to better understand the analysis of the
torpedo, the definitions of stability and some of the tools used to determine system
stability are presented below.
Consider the state equation written in Equation 49. For the continuous-time case
with zero input
)0,(xfx =&
with the origin defined at the equilibrium trim condition, the following apply.
Definition 1
The origin is a stable equilibrium point if there exists an ε > 0 and a δ(ε,t0) > 0,
such that if )( 0tx < δ, then the resultant motion x(t) satisfies )(tx < ε for all t >
t0.
This definition of stability is sometimes called stability in the sense of Lyapunov,
abbreviated as stable i.s.L. If a system possesses this type of stability, then it is ensured
56

that the state can be kept within ε, in norm, of the origin by restricting the initial
perturbation to be less than δ, in norm. Note that it is necessarily true that εδ ≤ .
Definition 2
The origin is an asymptotically stable stable equilibrium point if (a) it is stable,
and if in addition, (b) there exists a number δ(t0) > 0 such that whenever
( )00 )( ttx δ< the resultant motion satisfies ( ) 0lim =∞→
txt
.
The following is a standard analysis result based on Definition 2. The equilibrium
point xn equal to x0 is asymptotically stable if all of the eigenvalues (poles15) of the
Jacobian ( )
j
i
xxf∂
Δ∂ , (the state-space A-matrix) have negative real parts. It is unstable if A
has an eigenvalue with a positive real part. If one or more of the eigenvalues are on the
jϖ axis and all others are in the left-half plane, no conclusions about stability can be
drawn from the linear model. Whether the actual behavior of the system is divergent or
convergent will then depend upon the higher-order terms in the Taylor’s Series
expansion. Thus, except for the borderline jϖ axis case, this result states that the
linearization can provide sufficient conditions for stability of the nonlinear system in a
neighborhood of an equilibrium point.
When nonzero inputs Δ(t) are considered, additional types of stability are often
used.
Definition 3 (Bounded input, bounded output stability)
Let u be a bounded input with Km as the least upper bound. If there exists a scalar
α such that for every t, the output satisfies mKy α≤ , then the system is bounded
input, bounded output stable, abbreviated as BIBO stable.
15 When the system equations are simultaneous linear ordinary differential equations (ODEs), the transfer function that results will be a ratio of polynomials; that is, ( ) ( ) ( )sasbsH = . If we assume that b and a have no common factors (as is usually the case), then values of s such that a(s)=0 will represent points where H(s) is infinity. These s-values are called poles of H(s). Values of s such that b(s)=0 are points where H(s)=0, and the corresponding s-locations are called zeros.
57
Some useful tools to analyze BIBO stability and full nonlinear stability include
phase-plane analysis and simulation.
6.1 Phase Plane Analysis
Phase-plane representations of nonlinear systems are used at various times to
analyze stability of a system because of the insight they provide. Although general
phase-plane analysis techniques exist, they are fully effective only for second-order
systems and are not pursued in detail here.
6.2 Simulation and Integration Schemes
Because of the lack of analytical solutions for nonlinear system equations,
simulation takes on a much greater significance. Many numerical integration schemes
will diverge if the integration step is too large for the frequency of the signal being
integrated. The major danger in applying fixed-step integration schemes to nonlinear
systems whose response frequencies may not be known in advance is that the numerical
algorithm instability may be falsely interpreted as a system instability. One approach
suggests that when a simulated response appears to be diverging, the simulation should
be retried using a smaller integration time-step.
Our simulations have been run with a time-step of 0.001 seconds with a 4th order
Runge-Kutta integration scheme. This time step appears to be sufficient, as was shown in
Figure 28, and allows the simulation to finish in a reasonable amount of time.
Note that there are other integration schemes that allow variable step sizes which
are adjusted based on the change in states, the errors associated with these methods can
be unquantifiable.
58
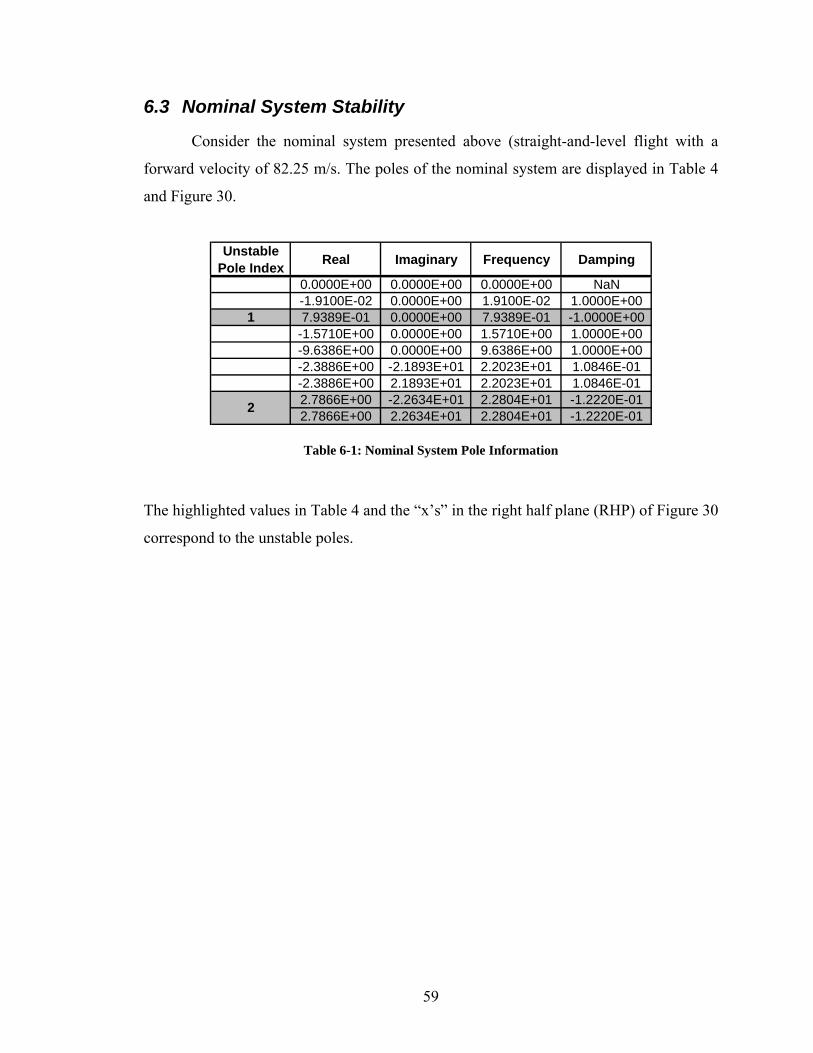
6.3 Nominal System Stability
Consider the nominal system presented above (straight-and-level flight with a
forward velocity of 82.25 m/s. The poles of the nominal system are displayed in Table 4
and Figure 30.
Unstable Pole Index Real Imaginary Frequency Damping
0.0000E+00 0.0000E+00 0.0000E+00 NaN-1.9100E-02 0.0000E+00 1.9100E-02 1.0000E+00
1 7.9389E-01 0.0000E+00 7.9389E-01 -1.0000E+00-1.5710E+00 0.0000E+00 1.5710E+00 1.0000E+00-9.6386E+00 0.0000E+00 9.6386E+00 1.0000E+00-2.3886E+00 -2.1893E+01 2.2023E+01 1.0846E-01-2.3886E+00 2.1893E+01 2.2023E+01 1.0846E-012.7866E+00 -2.2634E+01 2.2804E+01 -1.2220E-012.7866E+00 2.2634E+01 2.2804E+01 -1.2220E-012
Table 6-1: Nominal System Pole Information
The highlighted values in Table 4 and the “x’s” in the right half plane (RHP) of Figure 30
correspond to the unstable poles.
59
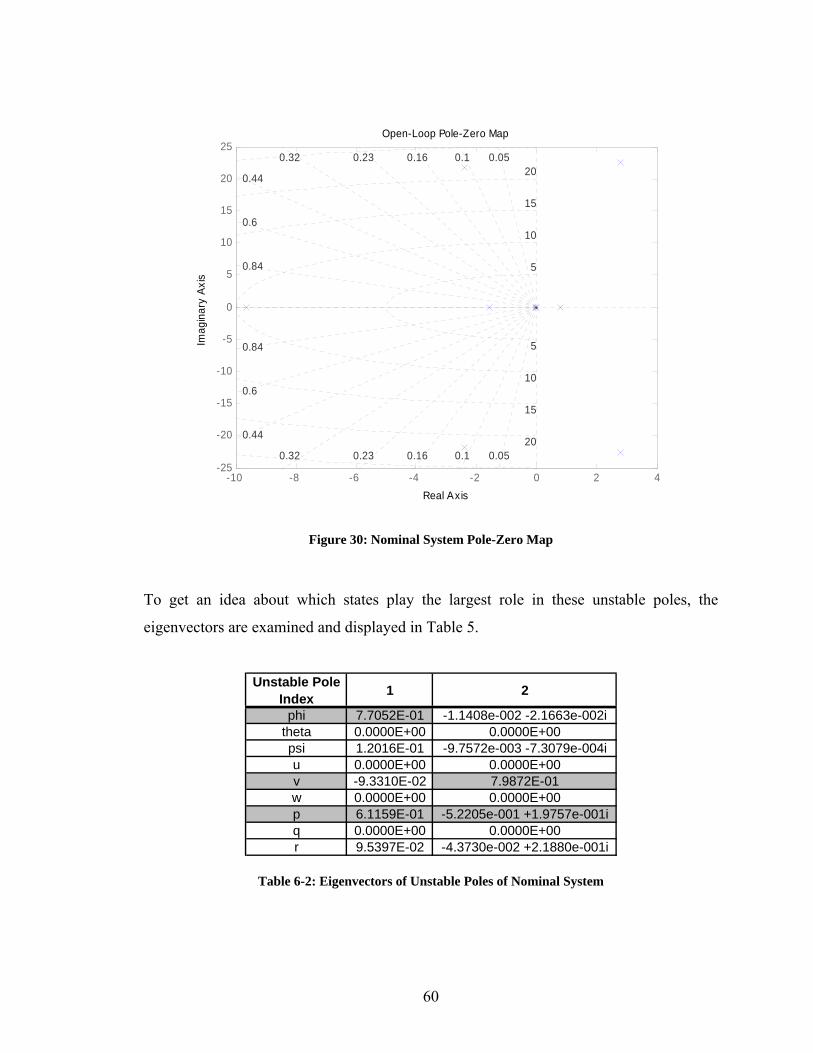
-10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.05
0.84
0.050.10.160.230.32
0.44
0.6
0.84
0.10.160.230.32
0.44
0.6
5
10
15
20
20
5
10
15
Open-Loop Pole-Zero Map
Real Axis
Imag
inar
y Ax
is
Figure 30: Nominal System Pole-Zero Map
To get an idea about which states play the largest role in these unstable poles, the
eigenvectors are examined and displayed in Table 5.
Unstable Pole Index 1 2
phi 7.7052E-01 -1.1408e-002 -2.1663e-002itheta 0.0000E+00 0.0000E+00psi 1.2016E-01 -9.7572e-003 -7.3079e-004iu 0.0000E+00 0.0000E+00v -9.3310E-02 7.9872E-01w 0.0000E+00 0.0000E+00p 6.1159E-01 -5.2205e-001 +1.9757e-001iq 0.0000E+00 0.0000E+00r 9.5397E-02 -4.3730e-002 +2.1880e-001i
Table 6-2: Eigenvectors of Unstable Poles of Nominal System
60
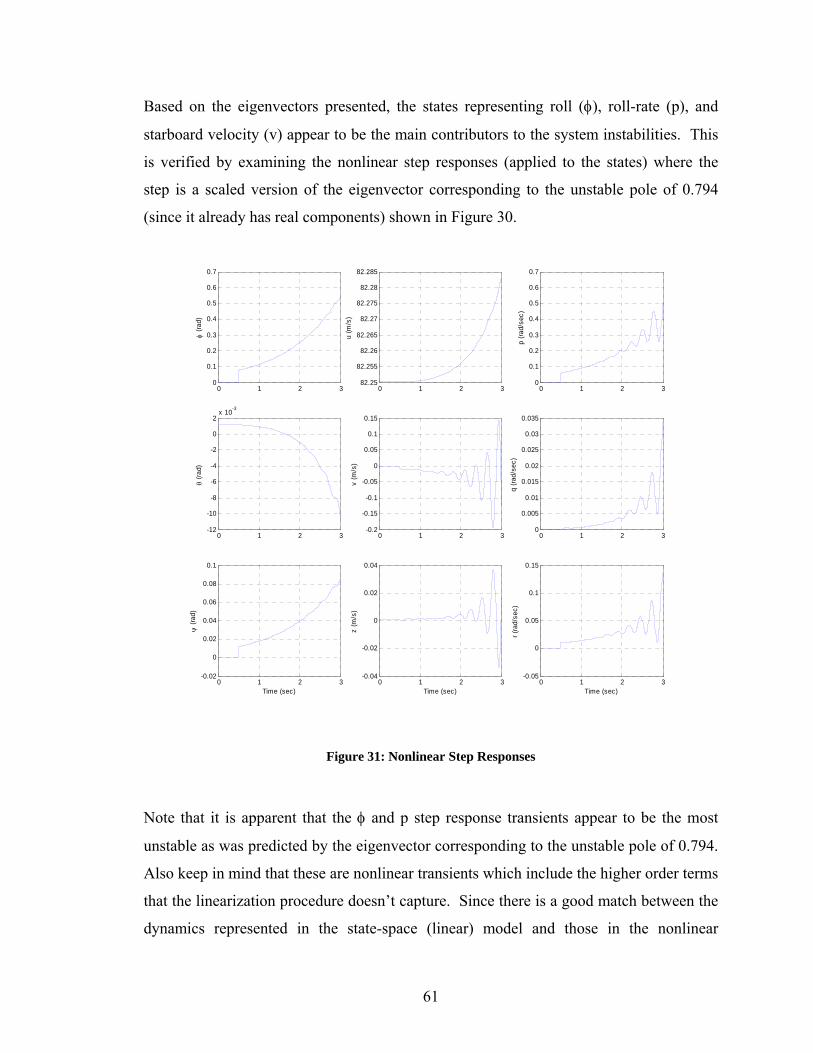
Based on the eigenvectors presented, the states representing roll (φ), roll-rate (p), and
starboard velocity (v) appear to be the main contributors to the system instabilities. This
is verified by examining the nonlinear step responses (applied to the states) where the
step is a scaled version of the eigenvector corresponding to the unstable pole of 0.794
(since it already has real components) shown in Figure 30.
0 1 2 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
φ (ra
d)
0 1 2 3-12
-10
-8
-6
-4
-2
0
2x 10-3
θ (ra
d)
0 1 2 3-0.02
0
0.02
0.04
0.06
0.08
0.1
ψ (r
ad)
Time (sec)
0 1 2 382.25
82.255
82.26
82.265
82.27
82.275
82.28
82.285
u (m
/s)
0 1 2 3-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
v (m
/s)
0 1 2 3-0.04
-0.02
0
0.02
0.04
z (m
/s)
Time (sec)
0 1 2 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
p (ra
d/se
c)
0 1 2 30
0.005
0.01
0.015
0.02
0.025
0.03
0.035
q (ra
d/se
c)
0 1 2 3-0.05
0
0.05
0.1
0.15
r (ra
d/se
c)
Time (sec)
Figure 31: Nonlinear Step Responses
Note that it is apparent that the φ and p step response transients appear to be the most
unstable as was predicted by the eigenvector corresponding to the unstable pole of 0.794.
Also keep in mind that these are nonlinear transients which include the higher order terms
that the linearization procedure doesn’t capture. Since there is a good match between the
dynamics represented in the state-space (linear) model and those in the nonlinear
61
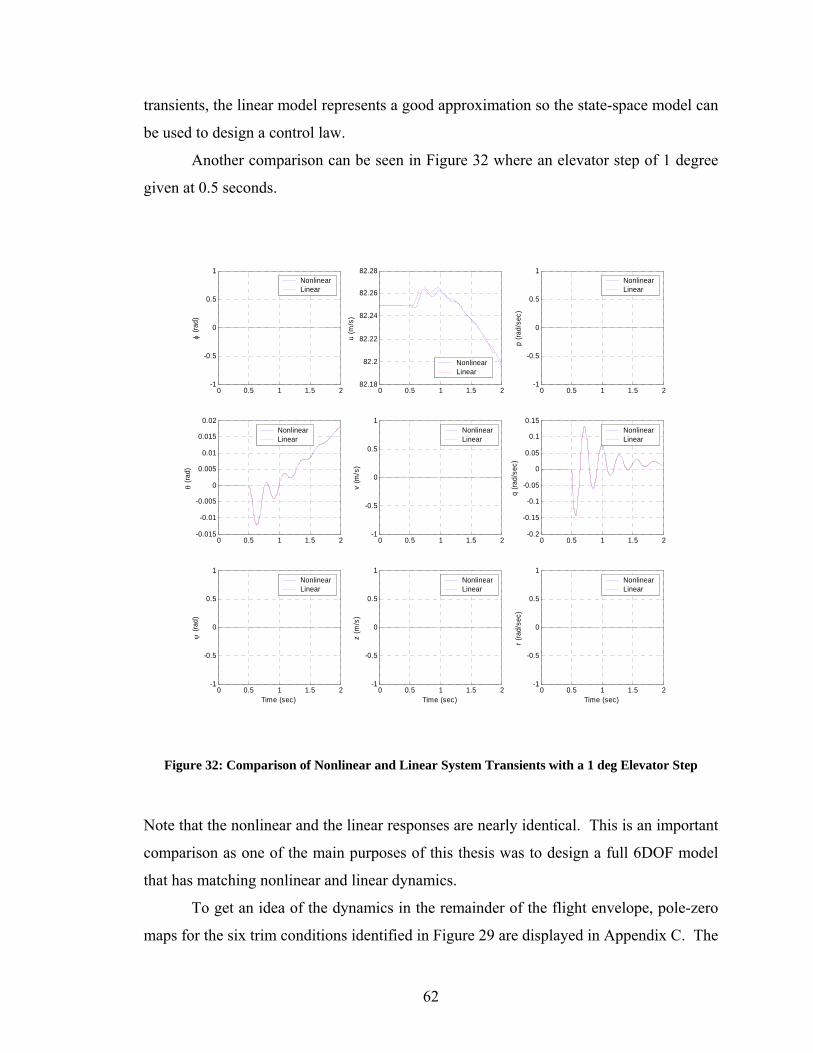
transients, the linear model represents a good approximation so the state-space model can
be used to design a control law.
Another comparison can be seen in Figure 32 where an elevator step of 1 degree
given at 0.5 seconds.
0 0.5 1 1.5 2-1
-0.5
0
0.5
1
φ (ra
d)
NonlinearLinear
0 0.5 1 1.5 2-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
θ (ra
d)
NonlinearLinear
0 0.5 1 1.5 2-1
-0.5
0
0.5
1
ψ (r
ad)
Time (sec)
NonlinearLinear
0 0.5 1 1.5 282.18
82.2
82.22
82.24
82.26
82.28
u (m
/s)
NonlinearLinear
0 0.5 1 1.5 2-1
-0.5
0
0.5
1
v (m
/s)
NonlinearLinear
0 0.5 1 1.5 2-1
-0.5
0
0.5
1
z (m
/s)
Time (sec)
NonlinearLinear
0 0.5 1 1.5 2-1
-0.5
0
0.5
1
p (ra
d/se
c)
NonlinearLinear
0 0.5 1 1.5 2-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
q (ra
d/se
c)
NonlinearLinear
0 0.5 1 1.5 2-1
-0.5
0
0.5
1
r (ra
d/se
c)
Time (sec)
NonlinearLinear
Figure 32: Comparison of Nonlinear and Linear System Transients with a 1 deg Elevator Step
Note that the nonlinear and the linear responses are nearly identical. This is an important
comparison as one of the main purposes of this thesis was to design a full 6DOF model
that has matching nonlinear and linear dynamics.
To get an idea of the dynamics in the remainder of the flight envelope, pole-zero
maps for the six trim conditions identified in Figure 29 are displayed in Appendix C. The
62
basic conclusion from those results is that as the velocity increases, the plant becomes
more unstable.
Also displayed in Appendix C is the state-space matrix for a straight-and-level
flight condition with a forward velocity of 88.25 m/s so that these results may be readily
verified by other researchers.
7 Control Law Design The objective of a control system is to make the output y behave in a desired way
by manipulating the plant input Δ. The regulator problem is to manipulate Δ to
counteract the effect of a disturbance d. The servo problem is to manipulate Δ to keep the
output close to a given reference input r. Thus, in both cases we want the control error
rye −= to be small. The algorithm for adjusting Δ based on the available information
is the controller K. To arrive at a good design for K, a priori information is needed about
the expected disturbances and reference inputs, and of the plant model (G) and the
disturbance model (Gd). In this thesis, control design makes use of the linear models for
the form
dGGy d+Δ= Equation 60
A major source of difficulty is that the models G and Gd are approximations and
may be inaccurate and can possibly change with time (when planing for instance). In
particular, inaccuracy in G may cause problems because the plant will be part of the
feedback loop. To deal with such a problem, there is the concept of model uncertainty.
For example, instead of a single nominal model G, the behavior of a class of models,
, where the “uncertainty” or “perturbation” E is bounded, but otherwise
unknown. In most cases, weighting functions w(s) are used to express E = wΛ in terms
of the normalized perturbations, Λ, where the magnitude (norm) of Λ is less than or equal
to 1.
EGGp +=
When considering such a design process, the following terms are useful:
• Nominal Stability (NS): The nominal system is stable with no uncertainty.
63
• Nominal Performance (NP): The system satisfies the performance specifications
with no model uncertainty.
• Robust Stability (RS): The system is stable for all perturbed plans about the
nominal model up to worst-case model uncertainty.
• Robust Performance (RP): The system satisfies the performance specifications
for all perturbed plants about the nominal model up to the worst-case model
uncertainty.
7.1 Transfer Functions
The remainder of this thesis makes extensive use of transfer functions, G(s), and
of the frequency domain, which are very useful in applications for the following reasons:
• Invaluable insights are obtained from simple frequency-dependent plots.
• Important concepts for feedback such as bandwidth and peaks of closed-loop
transfer functions may be defined.
• G(jω) gives the response to sinusoidal input of frequency ω.
• A series interconnection of systems corresponds in the frequency domain to
multiplication of the individual transfer functions, whereas in the time domain,
the evaluation of complicated convolution integrals is required.
• Poles and zeros appear explicitly in factorized scaler transfer functions.
• Uncertainty is more easily handled in the frequency domain. This is related to the
fact that two systems can be described as close (i.e. have similar behavior) if the
frequency responses are similar. On the other hand, a small change in a
parameters in a state-space description can result in an entirely different system
response.
Reconsider the linear, time invariant system from Equation 55 whose input-output
responses are governed by linear ODE’s with constant coefficients.
Δ+=Δ+=
DCxyBAxx
64
For a proper system, with the number of poles greater than or equal to the number of
zeros, the transfer function can be written from the above state-space realization as
Equation 61 ( ) ( ) DBAsICsG +−= −1
Note that for multivariable system such as this torpedo model, G(s) is a matrix of transfer
functions.
For closed-loop transfer functions S denotes the sensitivity of the plant output,
and denotes the complimentary sensitivity. With negative feedback,
and , where L is the transfer function around the loop as seen
from the output. In most cases, L=GK, but if measurement dynamics are also included
then L=GKG
SIT −=
( ) 1−+= LIS ( ) 1−+= LILT
( nyGy mm += ) m. The corresponding transfer functions as seen from the
input of the plant are LI=KG or (LI=KGmG), SI=(I+LI)-1 and TI=LI(I+LI)-1.
Typical representations of closed-loop systems in block diagram form are shown
in Figure 33; case (a) is a one degree-of-freedom (1DOF) feedback loop and (b) is the
general structure.
65
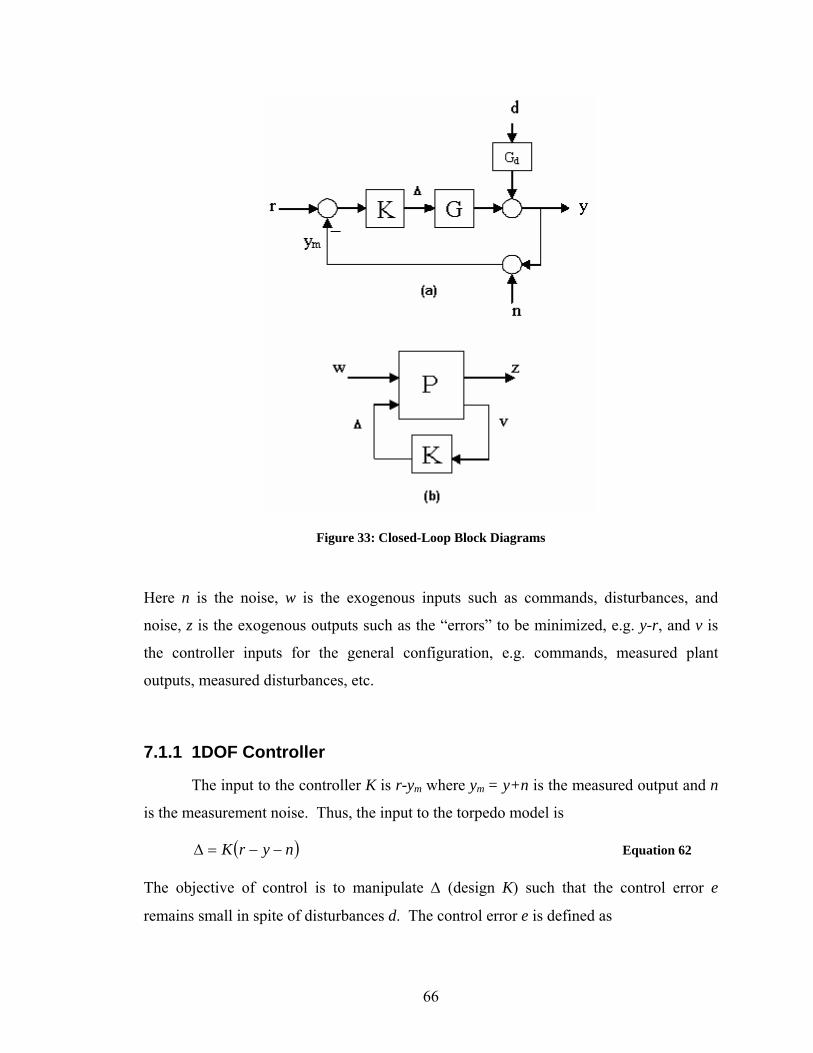
Figure 33: Closed-Loop Block Diagrams
Here n is the noise, w is the exogenous inputs such as commands, disturbances, and
noise, z is the exogenous outputs such as the “errors” to be minimized, e.g. y-r, and v is
the controller inputs for the general configuration, e.g. commands, measured plant
outputs, measured disturbances, etc.
7.1.1 1DOF Controller
The input to the controller K is r-ym where ym = y+n is the measured output and n
is the measurement noise. Thus, the input to the torpedo model is
Equation 62 ( nyrK −−=Δ )
The objective of control is to manipulate Δ (design K) such that the control error e
remains small in spite of disturbances d. The control error e is defined as
66

rye −= Equation 63
where r denotes the reference point of the output.
7.1.2 Closed-Loop Transfer Functions
The plant model is written as
dGGy d+Δ= Equation 64
and for a 1DOF controller and substitution of Equation 62 into Equation 64 yields
Equation 65
( )( )
( ) ( ) ( ) nGKGKIdGGKIrGKGKIy
GKndGGKryGKIdGnyrGKy
T
d
ST
d
d
44 344 21434 2144 344 21111 −−− +−+++=
−+=++−−=
Equation 65 represents the closed-loop response.
The control error is
TndSGSrrye d −+−=−= Equation 66
The corresponding plant input signal is
KSndKSGKSr d −−=Δ
From the above equations, it is clear that S is the closed-loop transfer function
from the output disturbances to the outputs, while T is the closed-loop transfer function
from the reference signals to the outputs. The term complimentary sensitivity follows
from the identity:
Equation 67 ITS =+
This is a fundamental design constraint for the control designer. What it means is that
there is ultimately a trade-off between disturbance rejection and closed-loop
performance; the designer cannot improve one without hindering the other.
67

7.2 Continuous-Time Linear Quadratic Controller
There are many methods used today to design controllers, some better than others
depending on the application. Common methods include PID, LQR, LQG, H∞, μ,
Dynamic Inversion, etc. However, since the focus of this thesis is really to define the
torpedo dynamic model, just a “simple” linear quadratic regulator (LQR) stabilizing
controller is synthesized here. The purpose being that this provides a stepping-stone to
further the control design process.
The LQR is a cornerstone of modern optimal control design. It has a wide range
of relevance, because many systems are linear to begin with, and in this case, the torpedo
model can be linearized when operating near an equilibrium point.
To design the optimal LQR, the design engineer must first select the design
parameter weight matrices Q (the state weighting) and R (the control weighting) in the
performance index shown in Equation 68.
Equation 68 [∫ ΔΔ+=1
0
t
t
TT dtRQxxJ ]
Q and R are symmetric matrices of design parameters chosen by the designer depending
on the control objectives. The weight matrix Q is assumed positive-semidefinite ( )0≥Q .
Thus Q has nonnegative eigenvalues so that xTQx is nonnegative for all x. Likewise, it
will be assumed that R is positive definite (R > 0), that is, R has positive eigenvalues so
that for all Δ. In this case, J is always bounded below zero, so that a sensible
minimization problem results. Since the squares of the states and control inputs occur in
Equation 68, the performance index is a form of generalized energy and minimizing it
will keep the states and controls small.
0>ΔΔ RT
For starting purposes, the gains for Q and R used in the original Anteon model
provide a good starting point. Thus, the weighting matrices chosen are
( )( ).011.01111
1.05.01.0000111diagRdiagQ
==
68
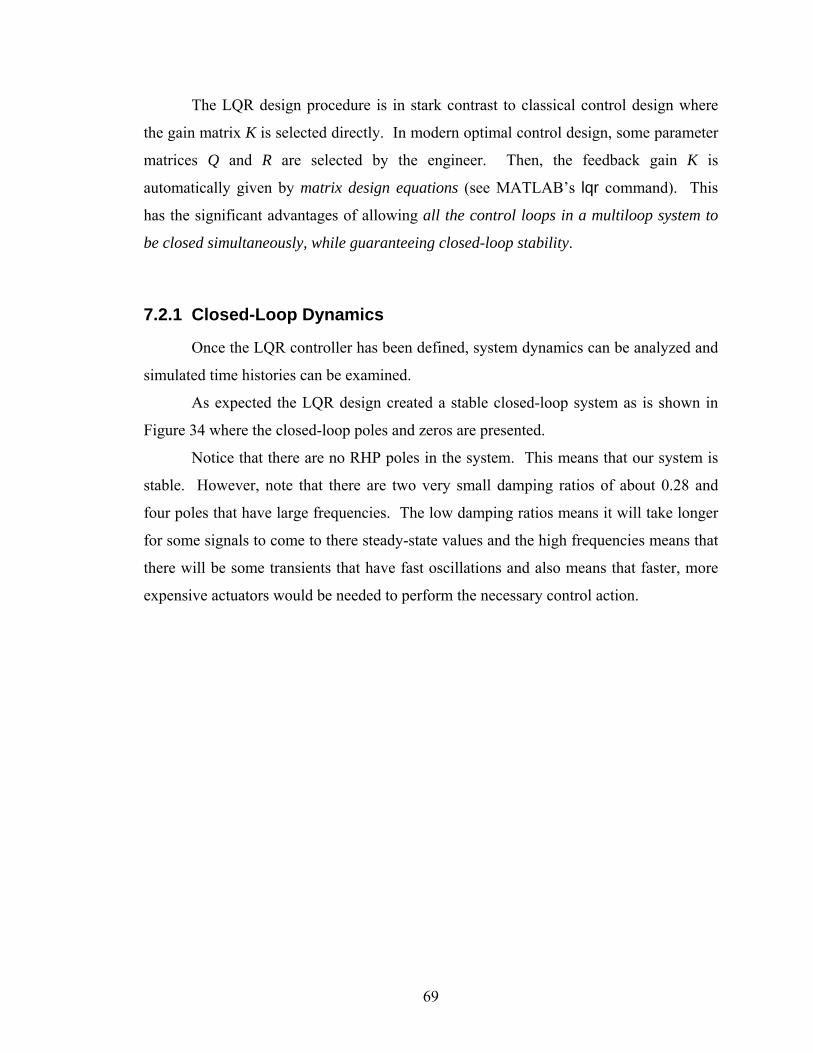
The LQR design procedure is in stark contrast to classical control design where
the gain matrix K is selected directly. In modern optimal control design, some parameter
matrices Q and R are selected by the engineer. Then, the feedback gain K is
automatically given by matrix design equations (see MATLAB’s lqr command). This
has the significant advantages of allowing all the control loops in a multiloop system to
be closed simultaneously, while guaranteeing closed-loop stability.
7.2.1 Closed-Loop Dynamics
Once the LQR controller has been defined, system dynamics can be analyzed and
simulated time histories can be examined.
As expected the LQR design created a stable closed-loop system as is shown in
Figure 34 where the closed-loop poles and zeros are presented.
Notice that there are no RHP poles in the system. This means that our system is
stable. However, note that there are two very small damping ratios of about 0.28 and
four poles that have large frequencies. The low damping ratios means it will take longer
for some signals to come to there steady-state values and the high frequencies means that
there will be some transients that have fast oscillations and also means that faster, more
expensive actuators would be needed to perform the necessary control action.
69

-30 -25 -20 -15 -10 -5 0-30
-20
-10
0
10
20
30
0.17 0.08
0.080.170.280.380.50.64
0.8
0.94
5
0.280.380.50.64
0.8
0.94
10
15
20
25
25
5
10
15
20
Closed-Loop Pole-Zero Map
Real Axis
Imag
inar
y Ax
is
Figure 34:Closed-Loop Pole-Zero Map of Nominal System with LQR Controller
Note that the large negative pole at -536 (lies on the Real axis) is not shown in the above
pole-zero map.
Figure 35 displays the nonlinear (solid, blue line) and linear (red, dashed line)
transients of a closed-loop system that utilizes the designed LQR controller after a step in
the yaw-rate state, r, with magnitude of 1 deg/sec at 0.5 sec.
70
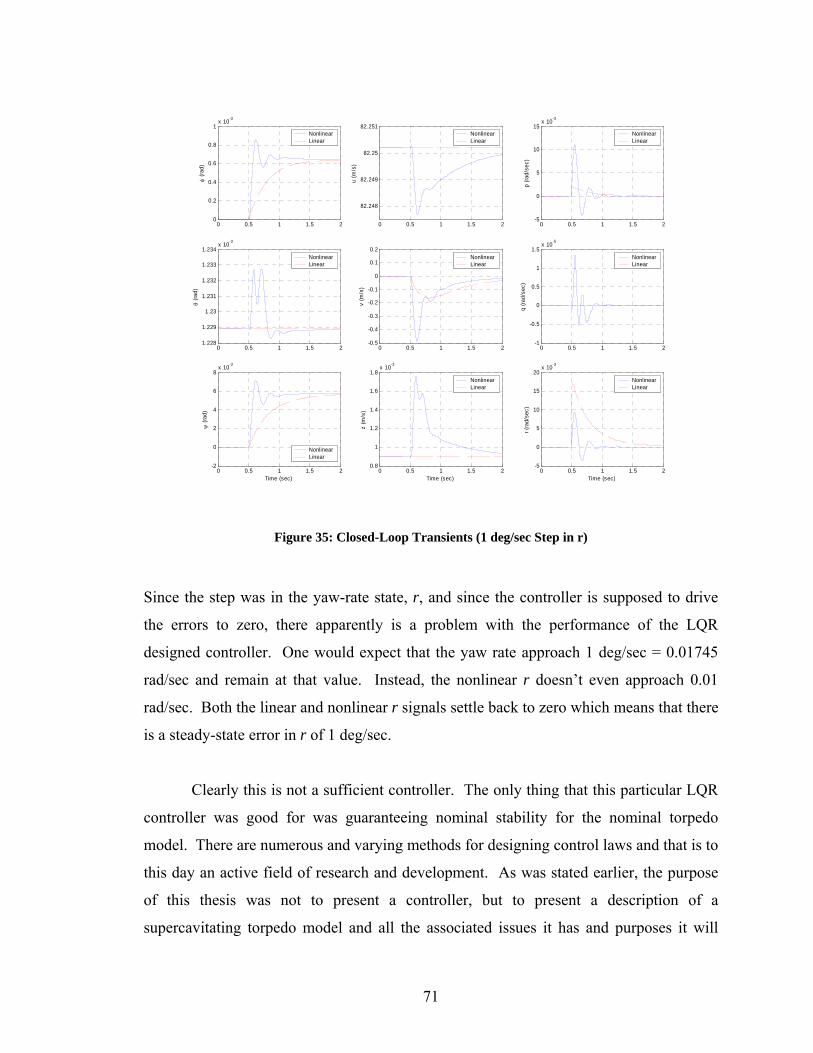
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1x 10-3
φ (ra
d)
NonlinearLinear
0 0.5 1 1.5 21.228
1.229
1.23
1.231
1.232
1.233
1.234x 10-3
θ (ra
d)
NonlinearLinear
0 0.5 1 1.5 2-2
0
2
4
6
8x 10-3
ψ (r
ad)
Time (sec)
NonlinearLinear
0 0.5 1 1.5 2
82.248
82.249
82.25
82.251
u (m
/s)
NonlinearLinear
0 0.5 1 1.5 2-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
v (m
/s)
NonlinearLinear
0 0.5 1 1.5 20.8
1
1.2
1.4
1.6
1.8x 10-3
z (m
/s)
Time (sec)
NonlinearLinear
0 0.5 1 1.5 2-5
0
5
10
15x 10-3
p (ra
d/se
c)
NonlinearLinear
0 0.5 1 1.5 2-1
-0.5
0
0.5
1
1.5x 10-5
q (ra
d/se
c)
NonlinearLinear
0 0.5 1 1.5 2-5
0
5
10
15
20x 10-3
r (ra
d/se
c)
Time (sec)
NonlinearLinear
Figure 35: Closed-Loop Transients (1 deg/sec Step in r)
Since the step was in the yaw-rate state, r, and since the controller is supposed to drive
the errors to zero, there apparently is a problem with the performance of the LQR
designed controller. One would expect that the yaw rate approach 1 deg/sec = 0.01745
rad/sec and remain at that value. Instead, the nonlinear r doesn’t even approach 0.01
rad/sec. Both the linear and nonlinear r signals settle back to zero which means that there
is a steady-state error in r of 1 deg/sec.
Clearly this is not a sufficient controller. The only thing that this particular LQR
controller was good for was guaranteeing nominal stability for the nominal torpedo
model. There are numerous and varying methods for designing control laws and that is to
this day an active field of research and development. As was stated earlier, the purpose
of this thesis was not to present a controller, but to present a description of a
supercavitating torpedo model and all the associated issues it has and purposes it will
71

fulfill such as control law design as well as to provide some reference for comparison
between the benchmark torpedo model and this updated model.
7.3 Transformed System
It is common in most aerospace applications that control of the torpedo be broken
up into two different loops. The inner loop which would control the angular rates p, q,
and r while the outer loop which would control the Euler angles φ, θ, and ψ. An
additional guidance loop is wrapped around these two loops for such applications such as
missiles and torpedoes. In order to stick with this convention and in order to get a better
idea of how the open-loop model behaves in terms of rate inputs to rate outputs (this is
currently difficult given the complex orientation and interaction between the torpedoes
control surfaces). To do this, the linear state-space must be transformed.
In order to get the desired inner-loop transfer functions, a new output matrix must
be defined.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
100000000010000000001000000
TC
rqpwvuψθφ
so that the angular rates can be pulled out of the state-space model. A transformation
matrix is then defined as
Equation 69 ( ) ( )[ ] ( olTT
olTolTT
olT BCpinvBCBCBCT ==−1 )
which is the pseudo inverse of the product of CT and BBol where Aol and BolB are the
dynamics and input Jacobean matrices representing the linearization of the open-loop
torpedo model.
The transformed system then becomes the state-space representation defined in
Equation 70.
72
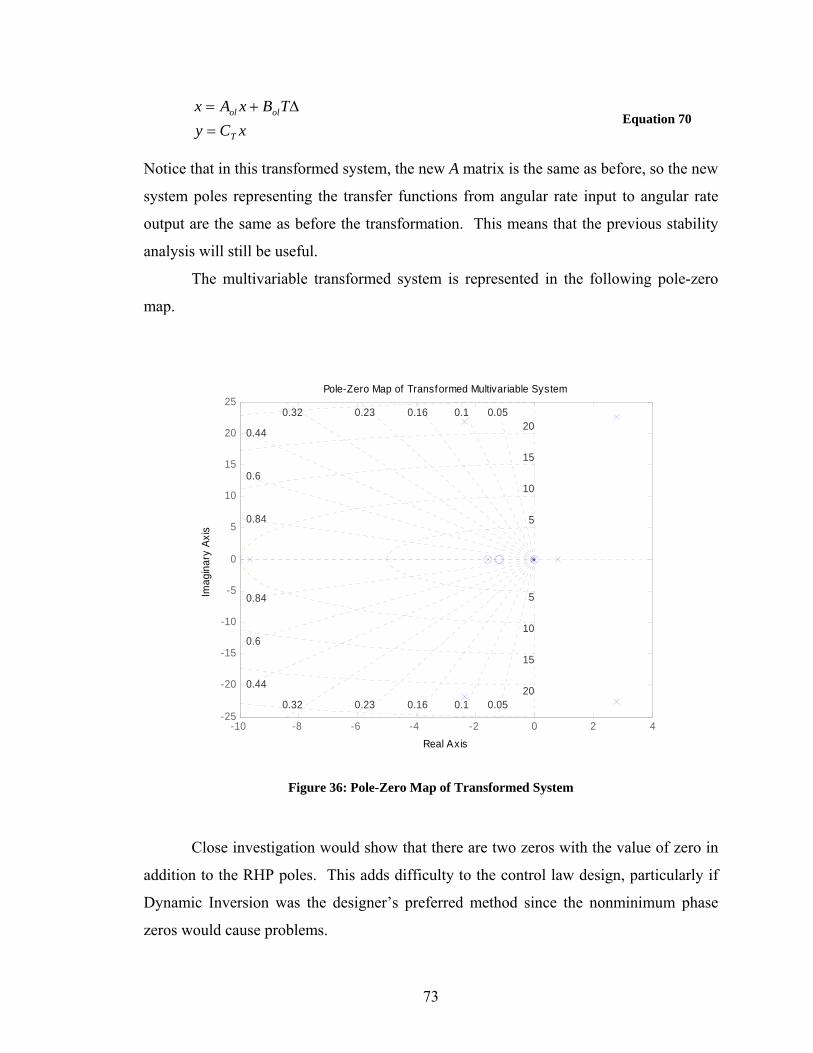
Equation 70 xCy
TBxAx
T
olol
=Δ+=
Notice that in this transformed system, the new A matrix is the same as before, so the new
system poles representing the transfer functions from angular rate input to angular rate
output are the same as before the transformation. This means that the previous stability
analysis will still be useful.
The multivariable transformed system is represented in the following pole-zero
map.
-10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.05
0.84
0.050.10.160.230.32
0.44
0.6
0.84
0.10.160.230.32
0.44
0.6
5
10
15
20
20
5
10
15
Pole-Zero Map of Transformed Multivariable System
Real Axis
Imag
inar
y Ax
is
Figure 36: Pole-Zero Map of Transformed System
Close investigation would show that there are two zeros with the value of zero in
addition to the RHP poles. This adds difficulty to the control law design, particularly if
Dynamic Inversion was the designer’s preferred method since the nonminimum phase
zeros would cause problems.
73
The purpose of this section is not necessarily to develop a controller for the inner-
loop, but rather to present a new method/model for control law design that is typically of
interest. Once a controller is designed for this inner loop, the outer-loop design for the
Euler angles becomes a much easier problem.
8 Model Uncertainty A control system is robust if it is insensitive to differences between the actual
system and the model of the system which was used to design the controller. These
differences are referred to as model/plant mismatch or simply model uncertainty.
Uncertainty in the plant model may have several origins:
1. There are always parameters in the linear model which are only known
approximately or are simply in error.
2. The parameters in the linear model may vary due to nonlinearities or changes in
the operating conditions.
3. Measurement devices have imperfections. This may even give rise to uncertainty
on the manipulated inputs, since the actual control input is often measured and
adjusted in a cascade manner. For example, this is often the case with valves used
to measure flow. In other cases limited valve resolution may cause input
uncertainty.
4. At high frequencies even the structure and the model order is unknown and the
uncertainty will always exceed 100% at some frequency.
5. Even when a very detailed model is available we may choose to work with a
simpler (low-order) nominal model and represent neglected dynamics as
“uncertainty”.
6. Finally, the controller implemented may differ from the one obtained by solving
the synthesis problem. In this case one may include uncertainty to allow for
controller order reduction and implementation inaccuracies.
74
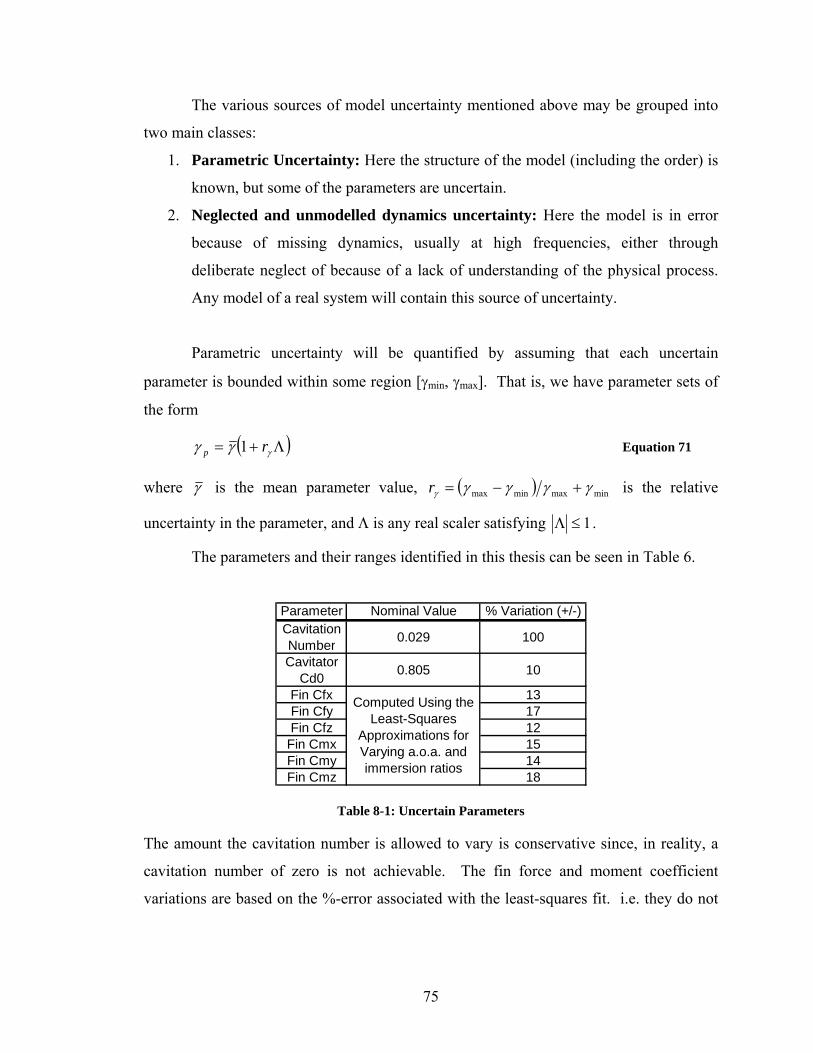
The various sources of model uncertainty mentioned above may be grouped into
two main classes:
1. Parametric Uncertainty: Here the structure of the model (including the order) is
known, but some of the parameters are uncertain.
2. Neglected and unmodelled dynamics uncertainty: Here the model is in error
because of missing dynamics, usually at high frequencies, either through
deliberate neglect of because of a lack of understanding of the physical process.
Any model of a real system will contain this source of uncertainty.
Parametric uncertainty will be quantified by assuming that each uncertain
parameter is bounded within some region [γmin, γmax]. That is, we have parameter sets of
the form
( )Λ+= γγγ rp 1 Equation 71
where γ is the mean parameter value, ( ) minmaxminmax γγγγγ +−=r is the relative
uncertainty in the parameter, and Λ is any real scaler satisfying 1≤Λ .
The parameters and their ranges identified in this thesis can be seen in Table 6.
Parameter Nominal Value % Variation (+/-)Cavitation Number 0.029 100
Cavitator Cd0 0.805 10
Fin Cfx 13Fin Cfy 17Fin Cfz 12
Fin Cmx 15Fin Cmy 14Fin Cmz 18
Computed Using the Least-Squares
Approximations for Varying a.o.a. and immersion ratios
Table 8-1: Uncertain Parameters
The amount the cavitation number is allowed to vary is conservative since, in reality, a
cavitation number of zero is not achievable. The fin force and moment coefficient
variations are based on the %-error associated with the least-squares fit. i.e. they do not
75

contain any errors due to the original model not being accurate. If one wanted to take
these type of errors into account, then the %-variation must be increased.
Neglected and unmodelled dynamics uncertainty is somewhat less precise and
thus more difficult to quantify, but it appears that the frequency domain is well suited for
this class. This leads to complex perturbations which we normalize that 1≤Λ∞
. Some
examples of unmodelled dynamics in this application would include the purposely
neglected time delays that were discussed when the cavity shape was defined.
For completeness one may consider a third class of uncertainty (which is really a
combination of the two).
3. Lumped Uncertainty: Here the uncertainty description represents one or several
sources of parametric and/or unmodelled dynamics uncertainty combined into a
single lumped perturbation of a chosen structure.
Parametric uncertainty is sometimes called structured uncertainty as it models the
uncertainty in a structured manner. Analogously, lumped dynamics uncertainty is
sometimes called unstructured uncertainty. However, one should be careful when using
these terms because there are several levels of structure, especially for MIMO systems
such as this torpedo.
8.1.1 Open-Loop Effects of Parametric Uncertainty
Some effects of model uncertainty can be seen in the way various parameters
effect the overall system dynamics. In order to examine these results, the uncertain
parameters identified above were examined by comparing the dynamics of the “nominal”
system with the systems with the minimum and maximum parameter variations. One
example of this comparison can be seen in Figure 37.
76
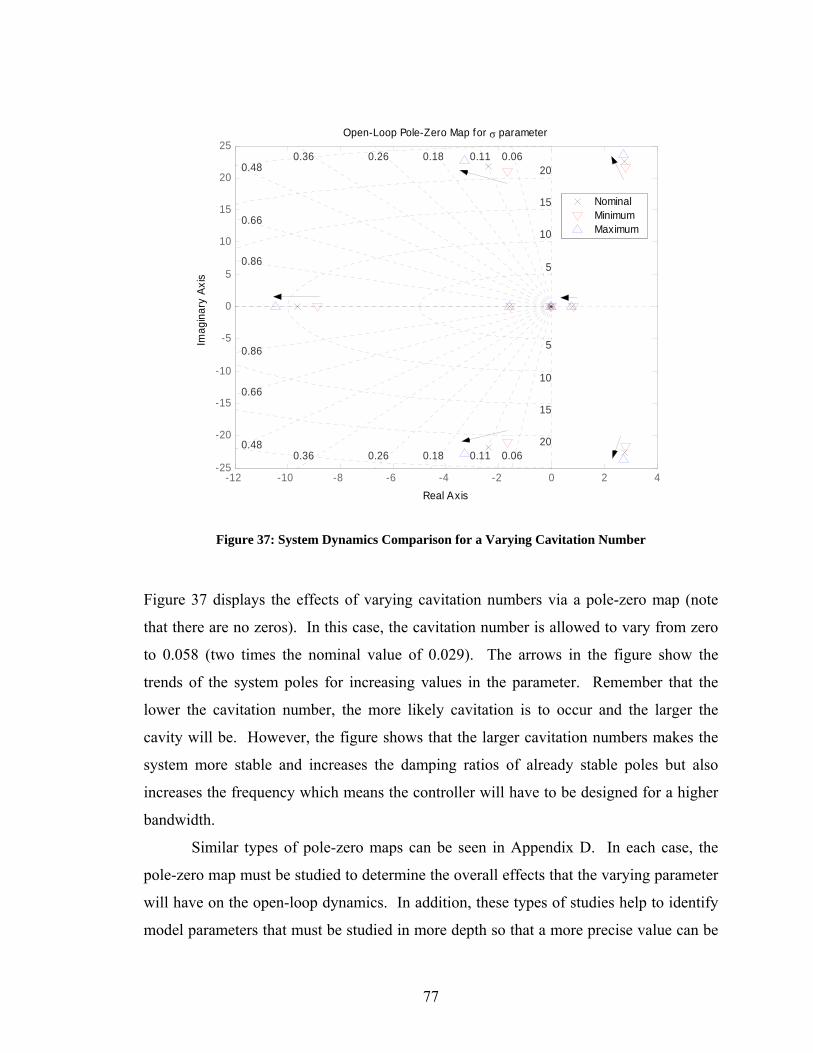
-12 -10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.66
0.480.36 0.26 0.18 0.11 0.06
0.36 0.26 0.18 0.11 0.06
0.86 5
0.66
0.48
15
20
0.86
15
10
10
20
5
NominalMinimumMaximum
Open-Loop Pole-Zero Map for σ parameter
Real Axis
Imag
inar
y Ax
is
Figure 37: System Dynamics Comparison for a Varying Cavitation Number
Figure 37 displays the effects of varying cavitation numbers via a pole-zero map (note
that there are no zeros). In this case, the cavitation number is allowed to vary from zero
to 0.058 (two times the nominal value of 0.029). The arrows in the figure show the
trends of the system poles for increasing values in the parameter. Remember that the
lower the cavitation number, the more likely cavitation is to occur and the larger the
cavity will be. However, the figure shows that the larger cavitation numbers makes the
system more stable and increases the damping ratios of already stable poles but also
increases the frequency which means the controller will have to be designed for a higher
bandwidth.
Similar types of pole-zero maps can be seen in Appendix D. In each case, the
pole-zero map must be studied to determine the overall effects that the varying parameter
will have on the open-loop dynamics. In addition, these types of studies help to identify
model parameters that must be studied in more depth so that a more precise value can be
77
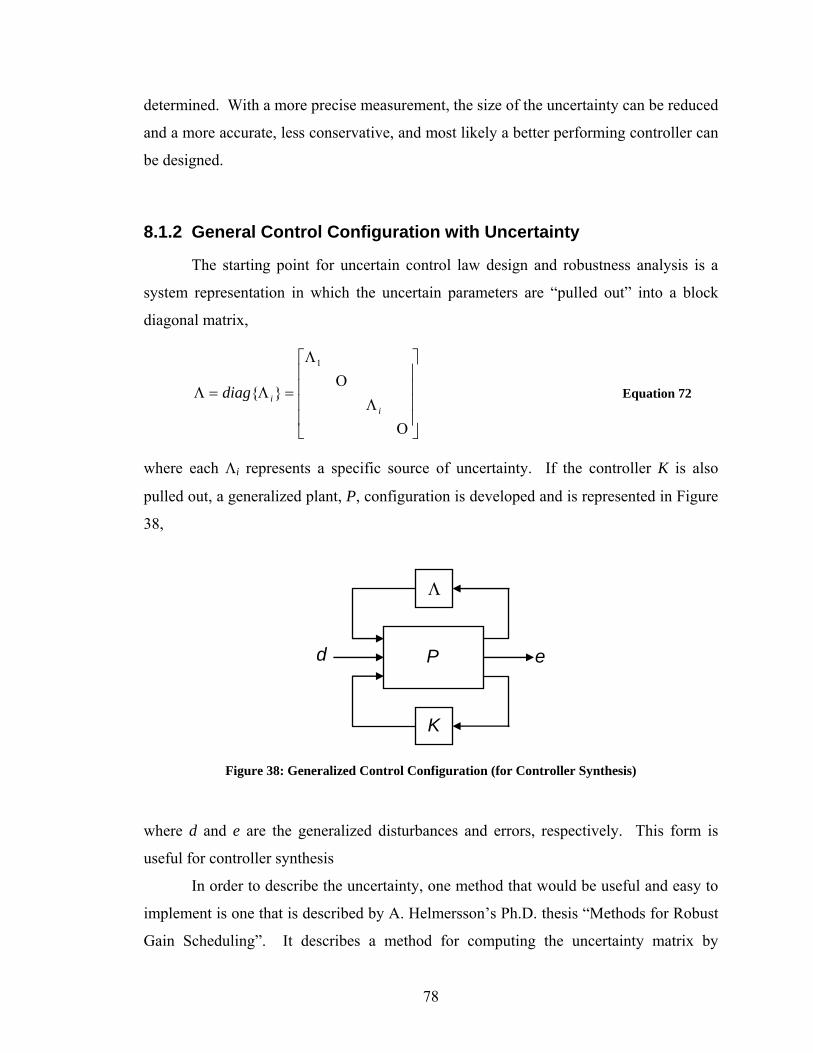
determined. With a more precise measurement, the size of the uncertainty can be reduced
and a more accurate, less conservative, and most likely a better performing controller can
be designed.
8.1.2 General Control Configuration with Uncertainty
The starting point for uncertain control law design and robustness analysis is a
system representation in which the uncertain parameters are “pulled out” into a block
diagonal matrix,
Equation 72
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Λ
Λ
=Λ=Λ
Ο
Ο
iidiag
1
}{
where each Λi represents a specific source of uncertainty. If the controller K is also
pulled out, a generalized plant, P, configuration is developed and is represented in Figure
38,
K
Λ
P ed
Figure 38: Generalized Control Configuration (for Controller Synthesis)
where d and e are the generalized disturbances and errors, respectively. This form is
useful for controller synthesis
In order to describe the uncertainty, one method that would be useful and easy to
implement is one that is described by A. Helmersson’s Ph.D. thesis “Methods for Robust
Gain Scheduling”. It describes a method for computing the uncertainty matrix by
78

differencing the A matrices of the nominal system with the system linearized with a min
and max value of an uncertain parameter and adding the unmodelled dynamics where
appropriate. This method would save on the work needed to pull out the uncertain
parameters from the code and represent them individually, though this method would be
marginally more accurate.
Numerous references exist which describe uncertainty in more detail and how to
design a controller that takes the various types of uncertainty into consideration. If
circumstances were different, this would have been the topic of this thesis, but due to
time constraints and other commitments, this work must be handed to another.
9 General Conclusions Supercavitating torpedoes are complex systems that require an active controller,
which can ensure stability and enable the torpedo to track a target. In addition, the
control law design process requires a dynamic model that captures the physics of the
problem. Existing public 6DOF models were not able to fully capture the dynamics of
the torpedo and provide a good platform with which to design a feedback controller.
This thesis was able to design such a model and it was shown that the complex nonlinear
and simple linear model (used for control design) had matching dynamics via computer
simulation. In addition, parameters within the model that are uncertain were identified
and it was described how to incorporate them into the control law design process.
By designing such a model, several interesting properties of the torpedo were
discovered. The first, and maybe one of the most important, is that if the planing forces
are used to help support the weight of the torpedo the large planing forces occur at such a
high frequency (~50 Hz) that designing a controller with the appropriate bandwidth
would be extremely difficult in addition to expensive. This is why the thesis treated the
occurrence of planing forces as a type of operating boundary since the forces produced by
the cavitator and fins are sufficient to support the vehicles weight. This also helps to reap
the benefits of a supercavitating torpedo – less drag.
79
Unfortunately, this model is not open-loop stable as is represented by the three
open-loop system RHP poles. The states that contribute the most to these unstable poles
are roll, roll-rate, and side velocity. In addition, two of the poles have a large frequency
which means that a robustly stable controller will be much harder to design since it will
have to have a high bandwidth.
Other interesting system properties are those that are observed when model
parameters are allowed to vary. Some of the more interesting affects were noticed when
the velocity and the cavitation number was allowed to vary. For example, as the velocity
increases, the plant becomes more unstable. When considering the cavitation number,
remember that the lower the cavitation number, the more likely the cavitation occurs and
the larger the cavity will be. However, open-loop sensitivity analysis showed that the
larger cavitation number not only made the system more stable and increased the
damping ratios of already stable poles but also increased the frequency. Similar types of
effects can be seen in other parameters as well as can be seen in Appendix D.
Further work into this subject should yield a robust feedback controller and
further analysis into the worst-case performance.
80

10 Bibliography [1] Ivan N. Kirschner, et al. “Control Strategies For Supercavitating Vehicles.” University of Minnesota Graduate Seminar Series (2001) [2] Etkin, Bernard. Dynamics of Flight: Stability and Control. Second Edition Ney York, John Wiley & Sons. 1958 [3] Enns, Dale Ph. D., AEM 4303 Flight Dynamics and Control Handout. University of Minnesota, Minneapolis. Spring Semester, 2000 [4] Honeywell Technology Center, Lockheed Martin Skunk Works, Lockheed Martin Tactical Aircraft Systems, “Application of Multivariable Control Theory to Aircraft Control Laws.” WL-TR-96-3099 [5] Yuriy N. Savchenko, “SUPERCAVITATION – PROBLEMS AND PERSPECTIVES.” National Academy of Sciences − Institute of Hydromechanics, Kyiv, Ukraine, CAV2001:lecture.003. 2001 [6] Stinebring, Billet, and Lindau, Kunz, “Developed Cavitation- Cavity Dynamics.” Applied Research Laboratory, Penn State [7] Mike Elgersma, “Multibody Dynamics Using a Projection Method (Kane’s Equations).” Honeywell Labs, Internal Document, November, 1989 [8] Burah, Haim. Analytical Dynamics. Boston, WCB McGraw-Hill. 1999 [9] R.L. Waid , “Cavity Shapes for Circular Disks at Angles of Attack” California Institute of Technology Hydrodynamics Laboratory Report No. E-73.4 Pasadena, CA. 1957 [10] Blakelock, John H., Automatic Control of Aircraft and Missiles. Second Edition New York: John Wiley & Sons, Inc, 1991 [11] Kirschner, Ivan, “Numerical Modeling of Supercavitating Flows.” Anteon/Engineering Technology Center. February, 2001 [12] Savchecnko, Yu. N., “Control of Supercavitation Flow and Stability of Supercavitating Motion of Bodies.” Ukranian National Academy of Sciences – Institute of Hydromechanics. Kyiv, Ukraine. 2001 [13] Savchecnko, Yuriy N., “Supercavitation – Problems and Perspectives.” National Academy of Sciences – Institute of Hydromechanics. Kyiv, Ukraine [14] Michel, J.M., “Introduction of Cavitation and Supercavitation.” Laboratoire des
81

Ecoulements Geophysiques et Industriels. Grenoble Cedex 9, France. 2001 [15] Savchenko, Yu. N., “Experimental Investigation of Supercavitating Motion of Bodies.” Ukranian National Academy of Sciences – Institute of Hydromechanics. Kyiv, Ukraine. 2001 [16] Uhlman, J.S., Fine, N.E., and Kring, D.C., “Calculation of Added Mass and Damping Forces on Supercavitating Bodies.” Engineering Technology Center, a Division of Anteon Coorporation. Middletown, RI. 2001 [17] Streeter, Handbook of Fluid Dynamics. pp 12-25 – 12-45 [18] Savchenko, Yu. N., “Supercavitating Object Propulsion.” Ukranian National Academy of Sciences – Institute of Hydromechanics. Kyiv, Ukraine. 2001 [19] Serebryakov, Vladimmir V., “Some Models of Prediction of Supercavitation Flows Based on Slender Body Approximation.” Institute of Hydromechanics of NASU, Kieve, Ukraine. 2001 [20] Levine, William S., The Control Handbook. IEEE Press. pp 82-83, 388-393, 417-418, 457-458, 762-768, 889-891, 1105-1107 [21] Shin, Jong-Yeob, Balas, Gary J., and Packard, Andrew K., “Worst-Case Analysis of the X-38 Crew Return Vehicle Flight Control System.” Journal of Guidance, Control and Dynamics. Vol. 24, No.2, March-April 2001
82
Appendix A: Fin Force and Moment Coefficient Data Computed Directly From Anteon’s Fin Look-up Table This appendix provides graphs of the provided fin force and moment coefficient look-up table as a function of angle of attack and immersion ratios. Only limited regions of the computed/possible operating spaces are presented in order to better show the portion of the space the linearization occurs in. It should be noted, however, that these linearization values or points in the table space are based in linearization of the original Anteon model code and does not represent data for the updated/corrected model.
83
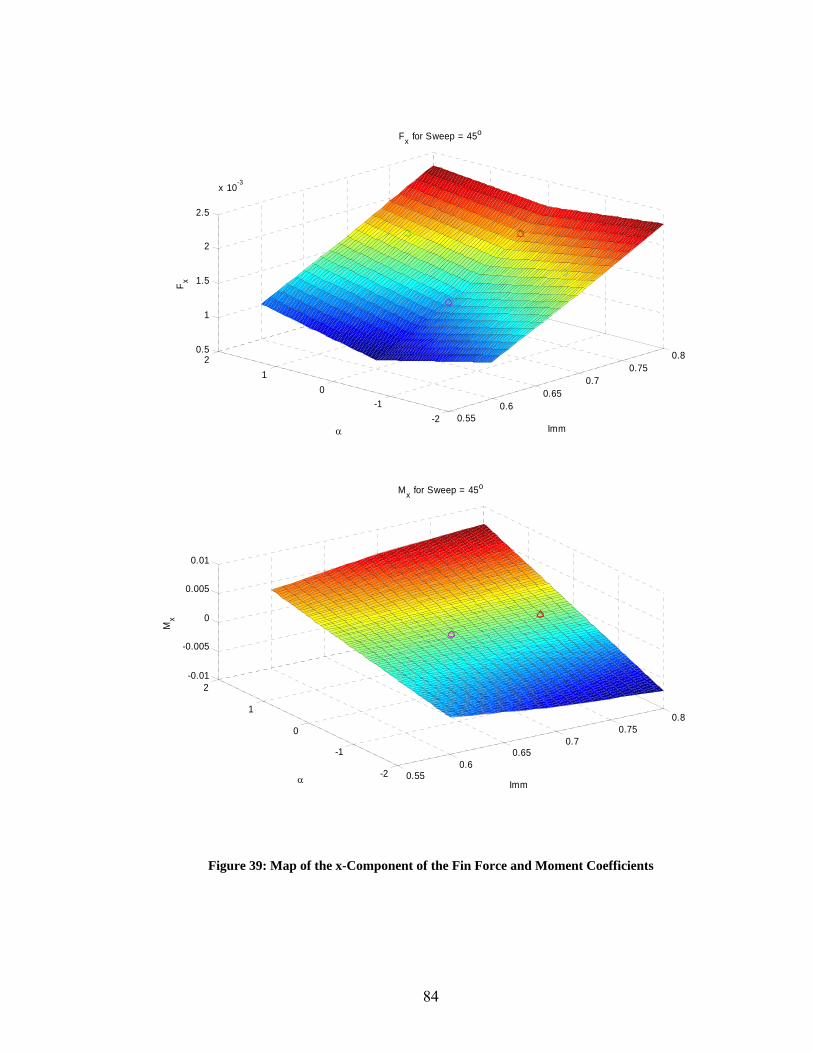
0.550.6
0.650.7
0.750.8
-2-1
01
20.5
1
1.5
2
2.5
x 10-3
Imm
Fx for Sweep = 45o
α
F x
0.550.6
0.650.7
0.750.8
-2
-1
0
1
2-0.01
-0.005
0
0.005
0.01
Imm
Mx for Sweep = 45o
α
Mx
Figure 39: Map of the x-Component of the Fin Force and Moment Coefficients
84
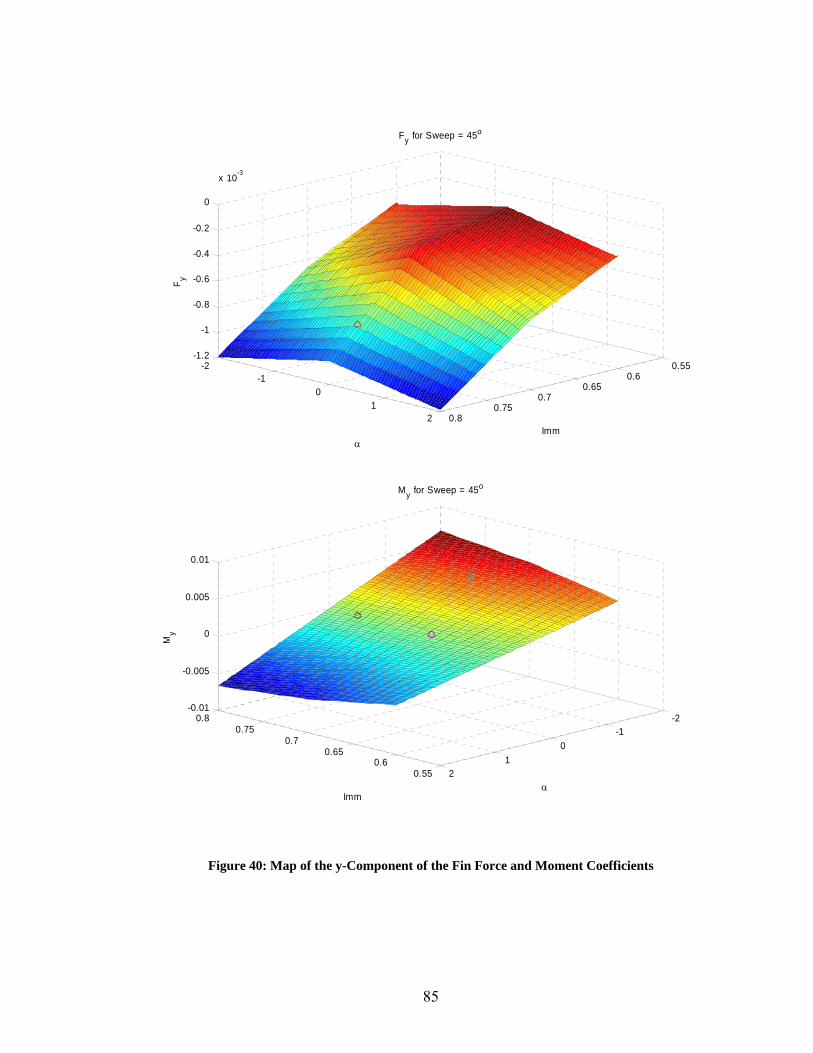
0.550.6
0.650.7
0.750.8
-2-1
01
2
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
x 10-3
Imm
Fy for Sweep = 45o
α
F y
0.550.6
0.650.7
0.750.8 -2
-10
12
-0.01
-0.005
0
0.005
0.01
α
My for Sweep = 45o
Imm
My
Figure 40: Map of the y-Component of the Fin Force and Moment Coefficients
85
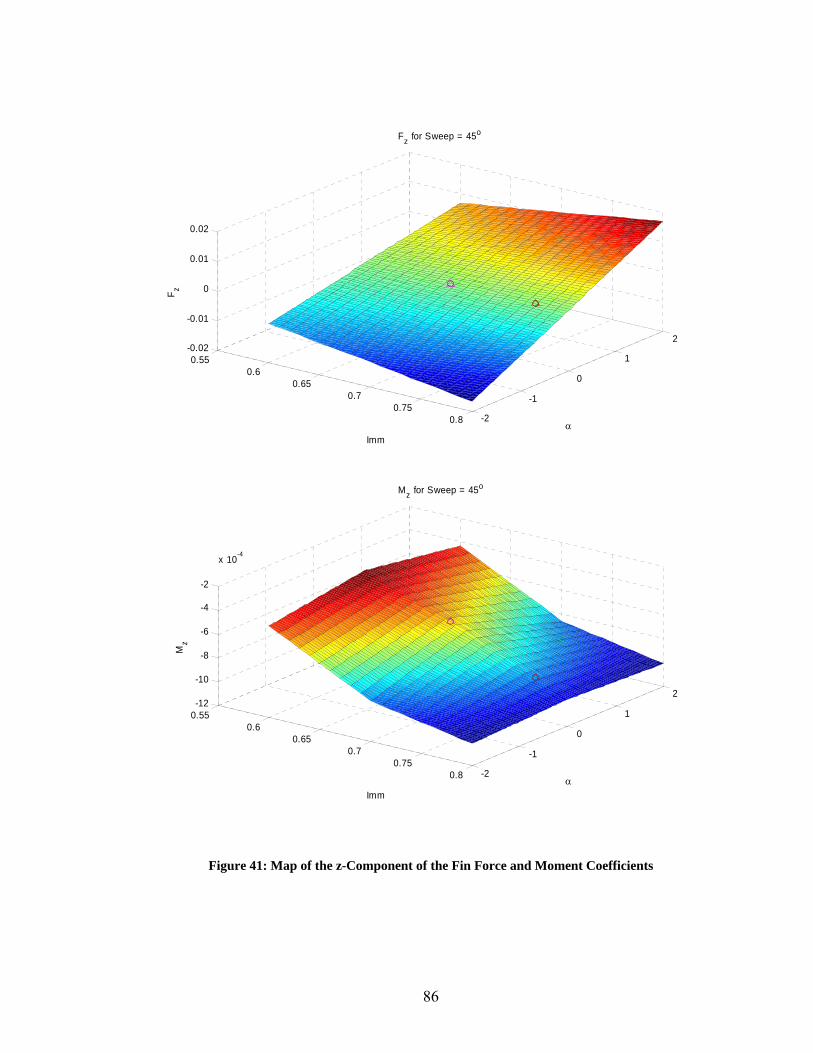
0.550.6
0.650.7
0.750.8 -2
-1
0
1
2-0.02
-0.01
0
0.01
0.02
α
Fz for Sweep = 45o
Imm
F z
0.550.6
0.650.7
0.750.8 -2
-1
0
1
2-12
-10
-8
-6
-4
-2
x 10-4
α
Mz for Sweep = 45o
Imm
Mz
Figure 41: Map of the z-Component of the Fin Force and Moment Coefficients
86

-2 -1.5 -1 -0.5 0 0.5 1 1.5 20.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4x 10-3 Fx for Sweep = 45o
α
F x
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-8
-6
-4
-2
0
2
4
6
8x 10
-3 Mx for Sweep = 45o
α
Mx
87
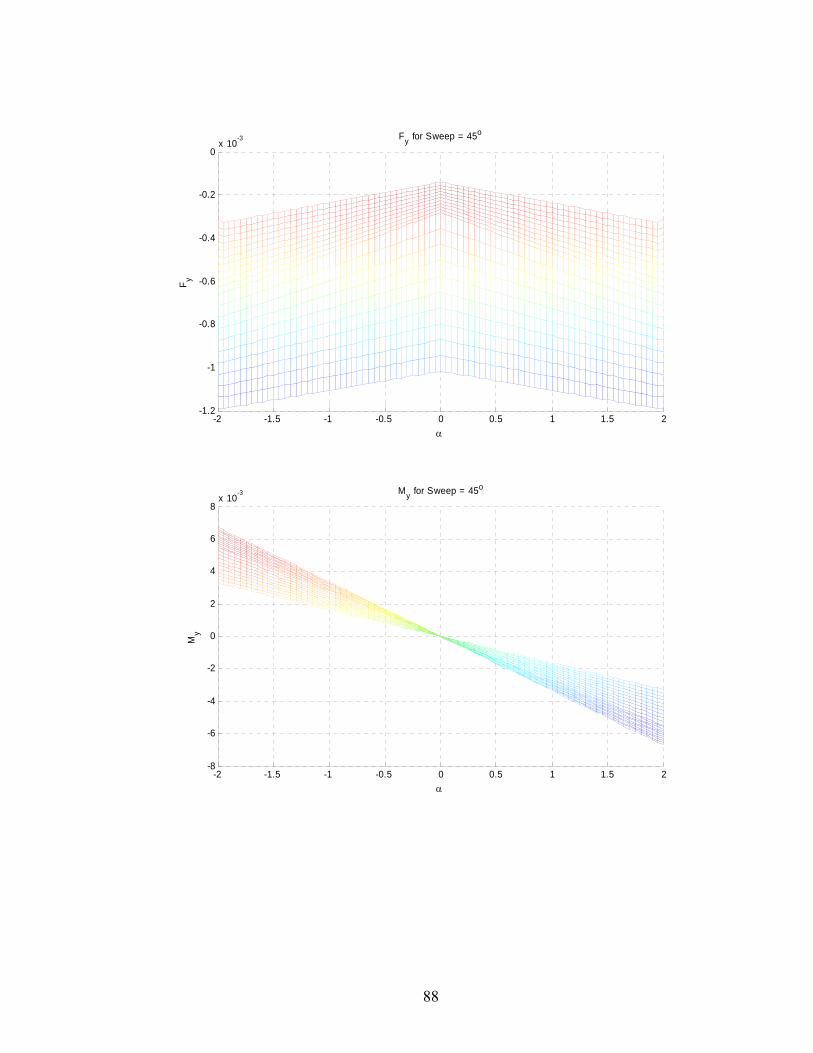
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-1.2
-1
-0.8
-0.6
-0.4
-0.2
0x 10-3 Fy for Sweep = 45o
α
F y
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-8
-6
-4
-2
0
2
4
6
8x 10
-3 My for Sweep = 45o
α
My
88
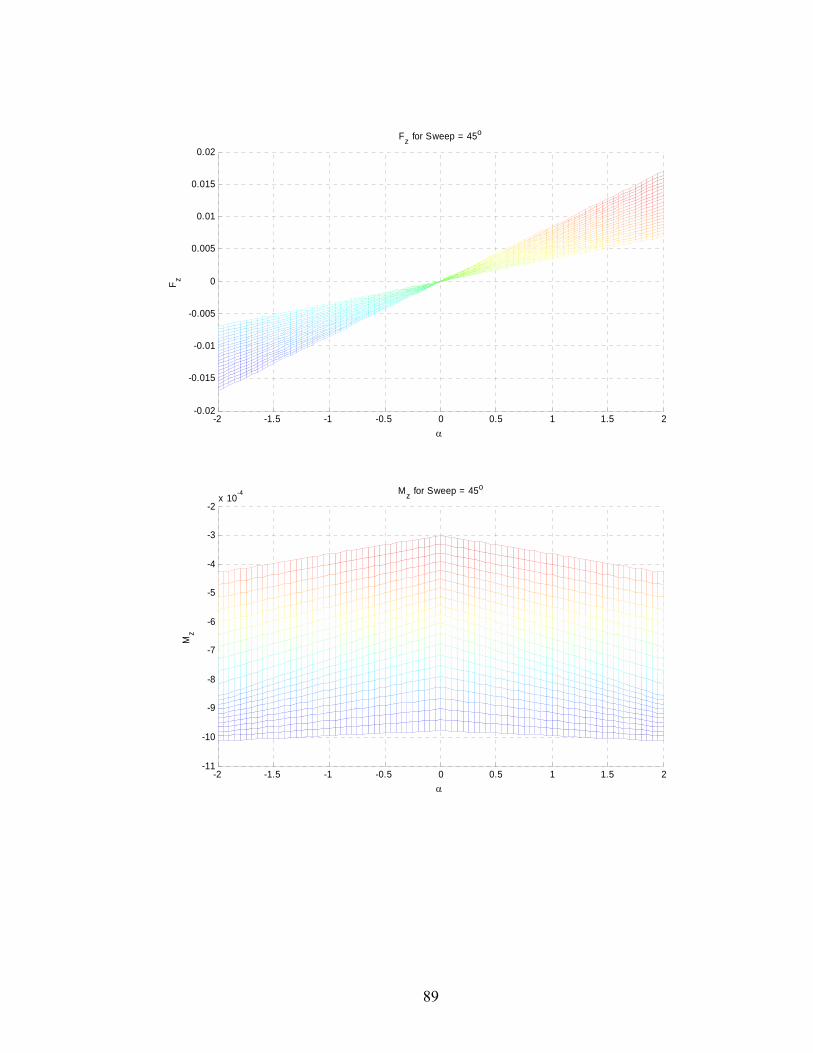
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02Fz for Sweep = 45o
α
F z
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-11
-10
-9
-8
-7
-6
-5
-4
-3
-2x 10
-4 Mz for Sweep = 45o
α
Mz
89
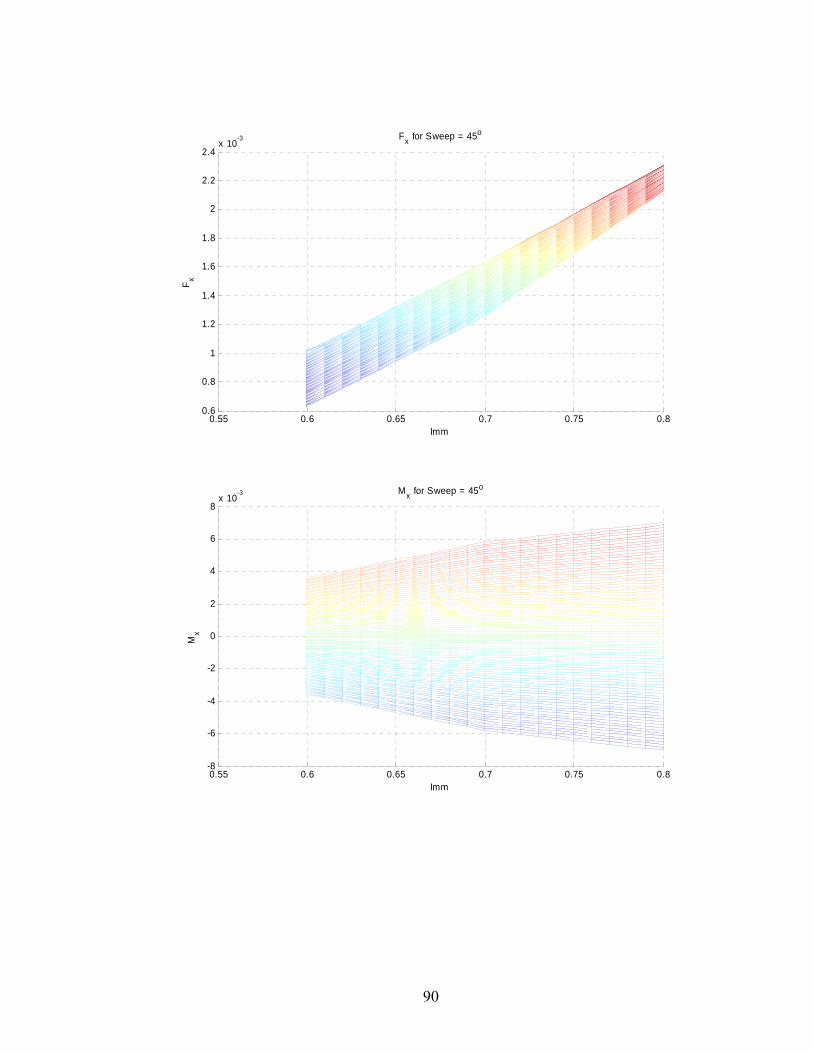
0.55 0.6 0.65 0.7 0.75 0.80.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4x 10-3 Fx for Sweep = 45o
Imm
F x
0.55 0.6 0.65 0.7 0.75 0.8-8
-6
-4
-2
0
2
4
6
8x 10
-3 Mx for Sweep = 45o
Imm
Mx
90
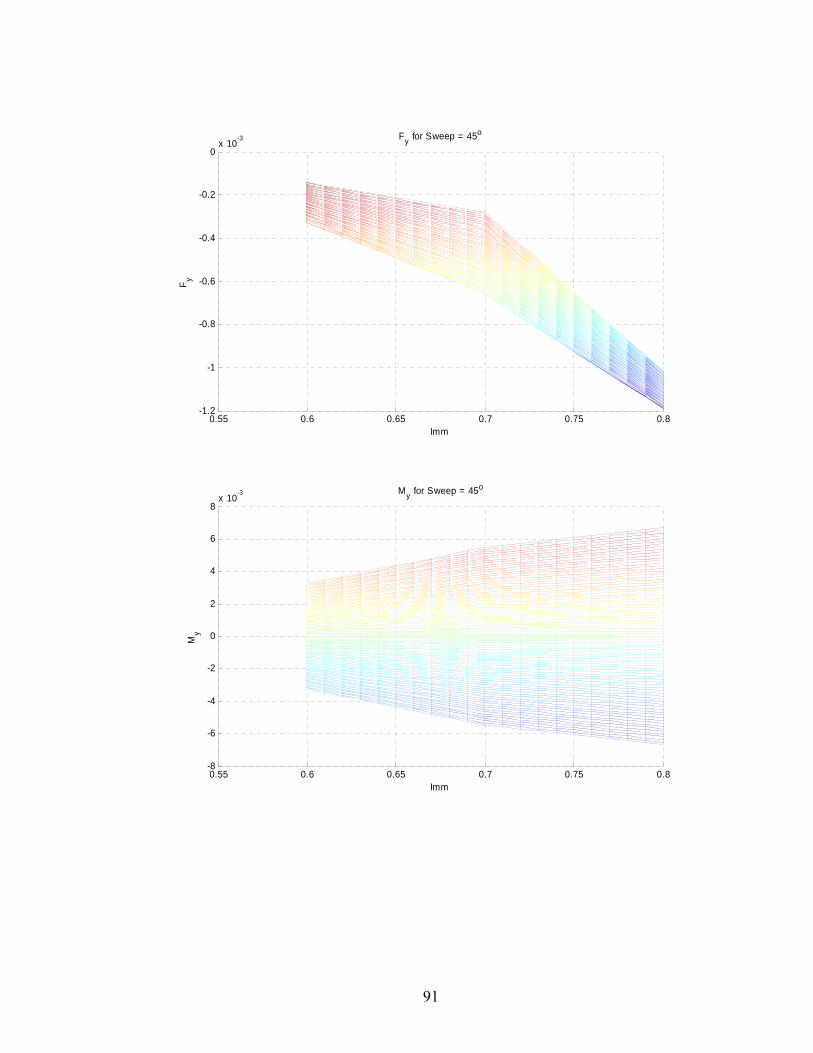
0.55 0.6 0.65 0.7 0.75 0.8-1.2
-1
-0.8
-0.6
-0.4
-0.2
0x 10-3 Fy for Sweep = 45o
Imm
F y
0.55 0.6 0.65 0.7 0.75 0.8-8
-6
-4
-2
0
2
4
6
8x 10
-3 My for Sweep = 45o
Imm
My
91
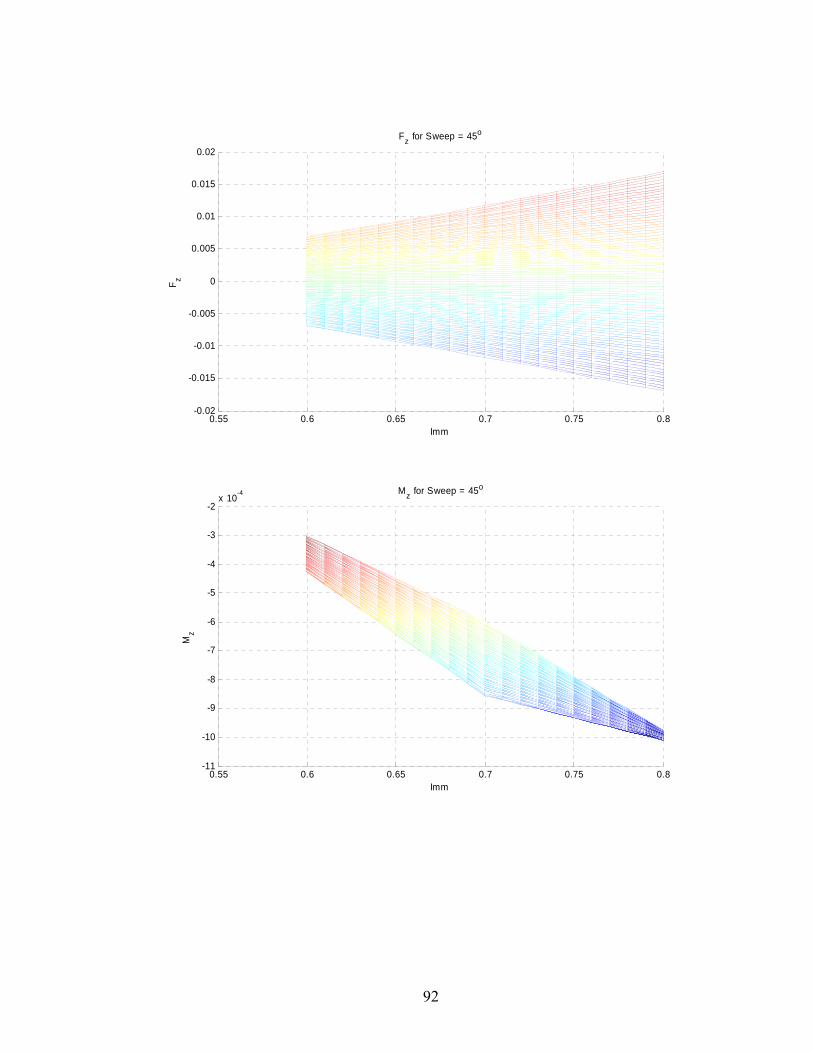
0.55 0.6 0.65 0.7 0.75 0.8-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02Fz for Sweep = 45o
Imm
F z
0.55 0.6 0.65 0.7 0.75 0.8-11
-10
-9
-8
-7
-6
-5
-4
-3
-2x 10
-4 Mz for Sweep = 45o
Imm
Mz
92

-2 -1.5 -1 -0.5 0 0.5 1 1.5 21
1.5
2
2.5x 10-3 Fx for Sweep = 45o
α
F x
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-8
-6
-4
-2
0
2
4
6
8x 10
-3 Mx for Sweep = 45o
α
Mx
93

-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-12
-10
-8
-6
-4
-2x 10-4 Fy for Sweep = 45o
α
F y
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-8
-6
-4
-2
0
2
4
6
8x 10
-3 My for Sweep = 45o
α
My
94
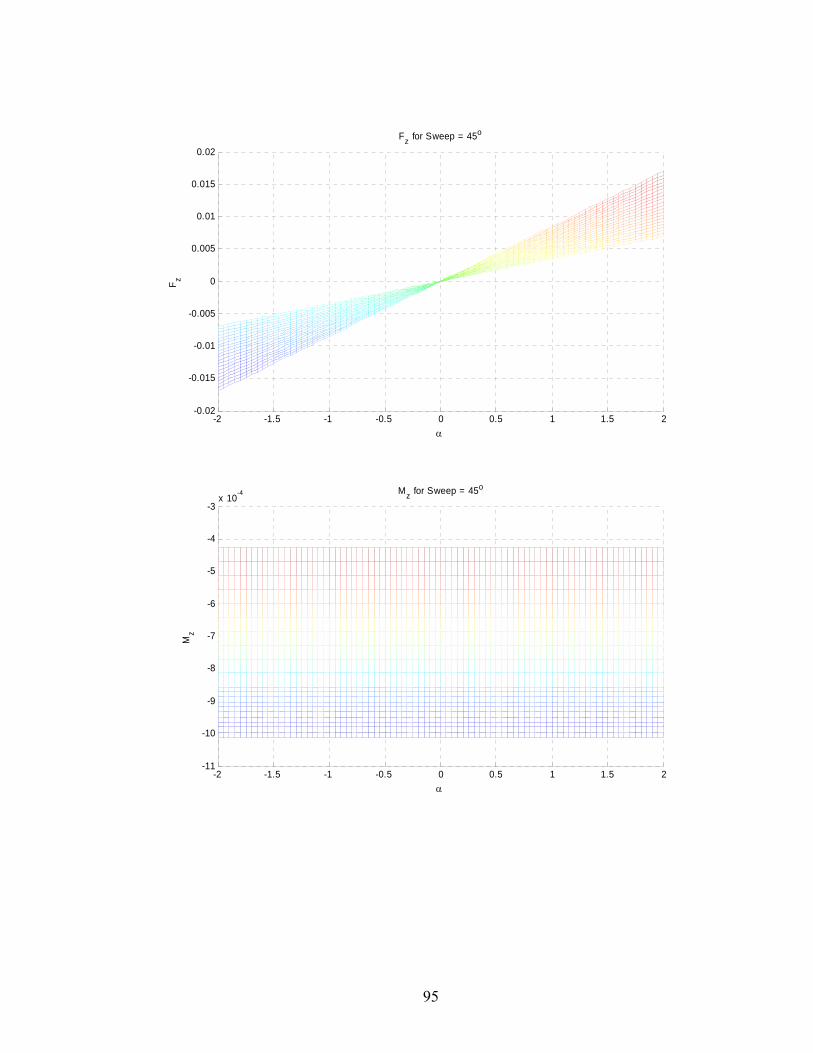
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02Fz for Sweep = 45o
α
F z
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-11
-10
-9
-8
-7
-6
-5
-4
-3x 10
-4 Mz for Sweep = 45o
α
Mz
95
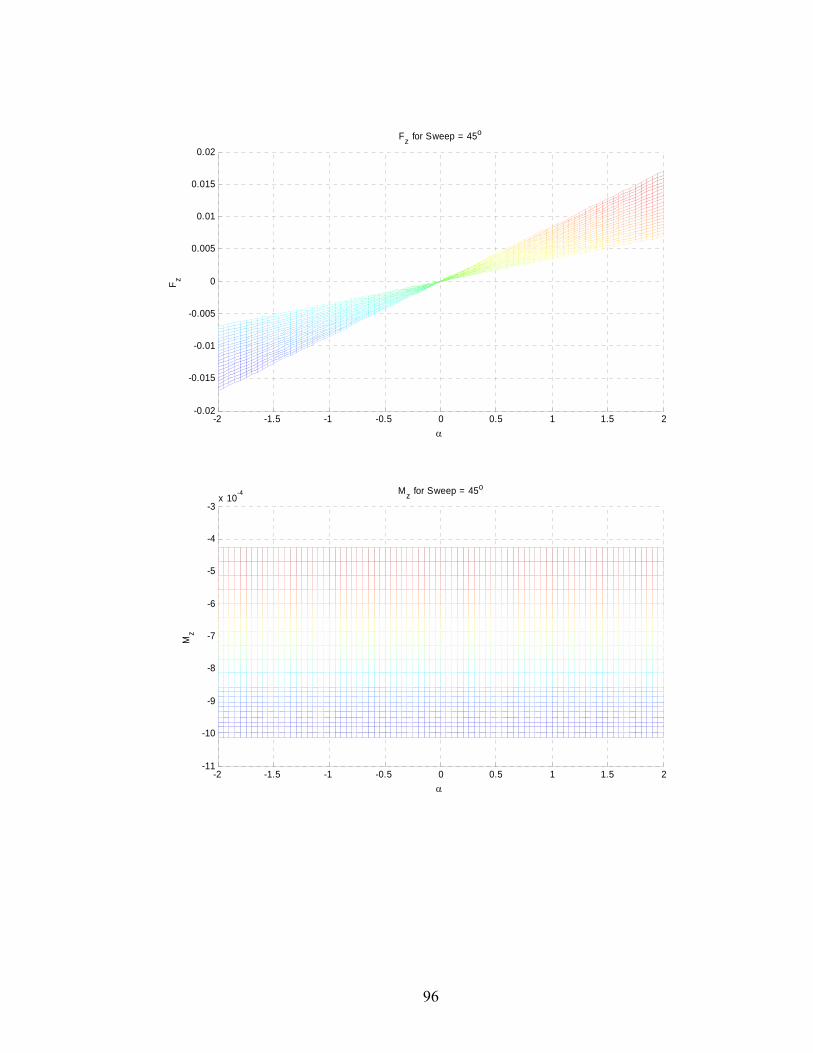
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02Fz for Sweep = 45o
α
F z
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-11
-10
-9
-8
-7
-6
-5
-4
-3x 10
-4 Mz for Sweep = 45o
α
Mz
96
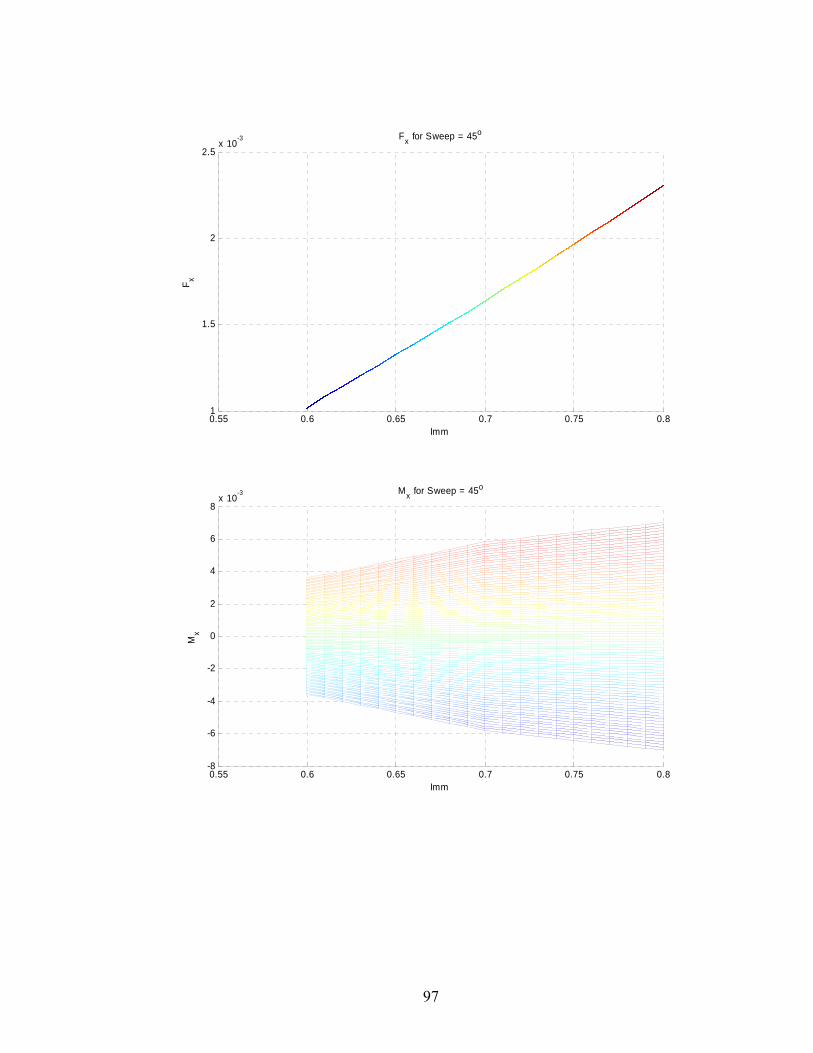
0.55 0.6 0.65 0.7 0.75 0.81
1.5
2
2.5x 10-3 Fx for Sweep = 45o
Imm
F x
0.55 0.6 0.65 0.7 0.75 0.8-8
-6
-4
-2
0
2
4
6
8x 10
-3 Mx for Sweep = 45o
Imm
Mx
97

0.55 0.6 0.65 0.7 0.75 0.8-12
-10
-8
-6
-4
-2x 10-4 Fy for Sweep = 45o
Imm
F y
0.55 0.6 0.65 0.7 0.75 0.8-8
-6
-4
-2
0
2
4
6
8x 10
-3 My for Sweep = 45o
Imm
My
98
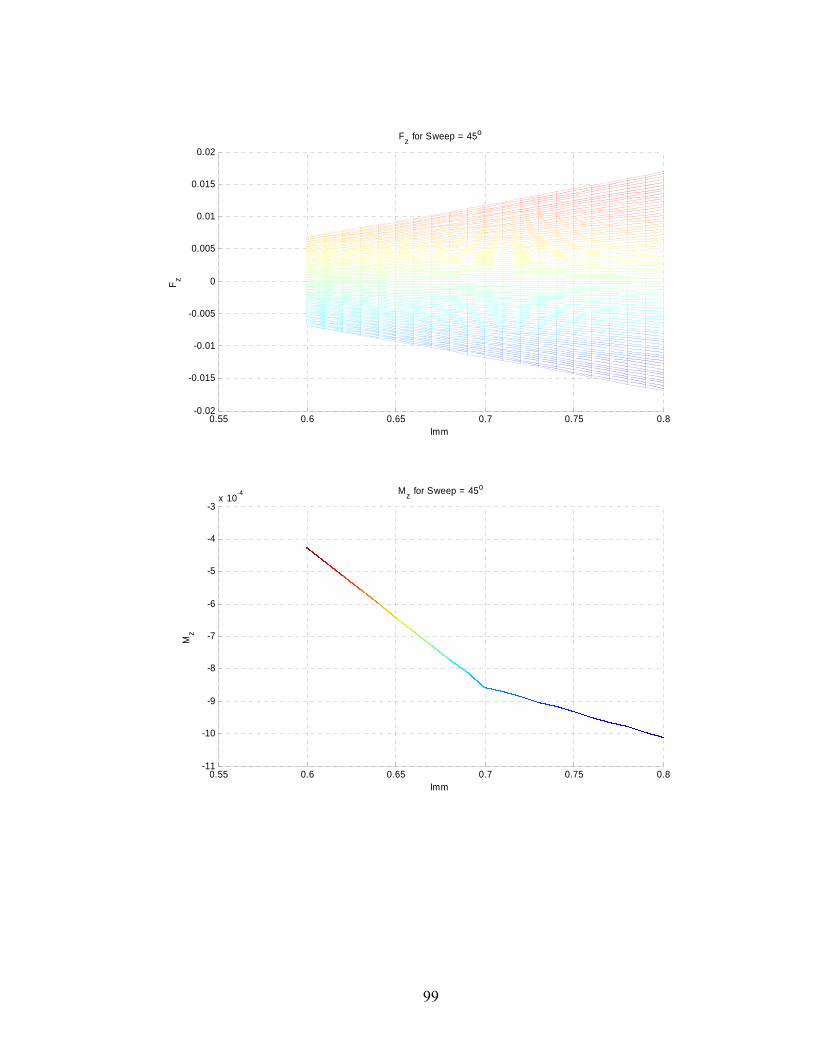
0.55 0.6 0.65 0.7 0.75 0.8-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02Fz for Sweep = 45o
Imm
F z
0.55 0.6 0.65 0.7 0.75 0.8-11
-10
-9
-8
-7
-6
-5
-4
-3x 10
-4 Mz for Sweep = 45o
Imm
Mz
99
Appendix B This appendix contains the Simulink and MATLAB code used to simulate the model and compute all appropriate forces.
100
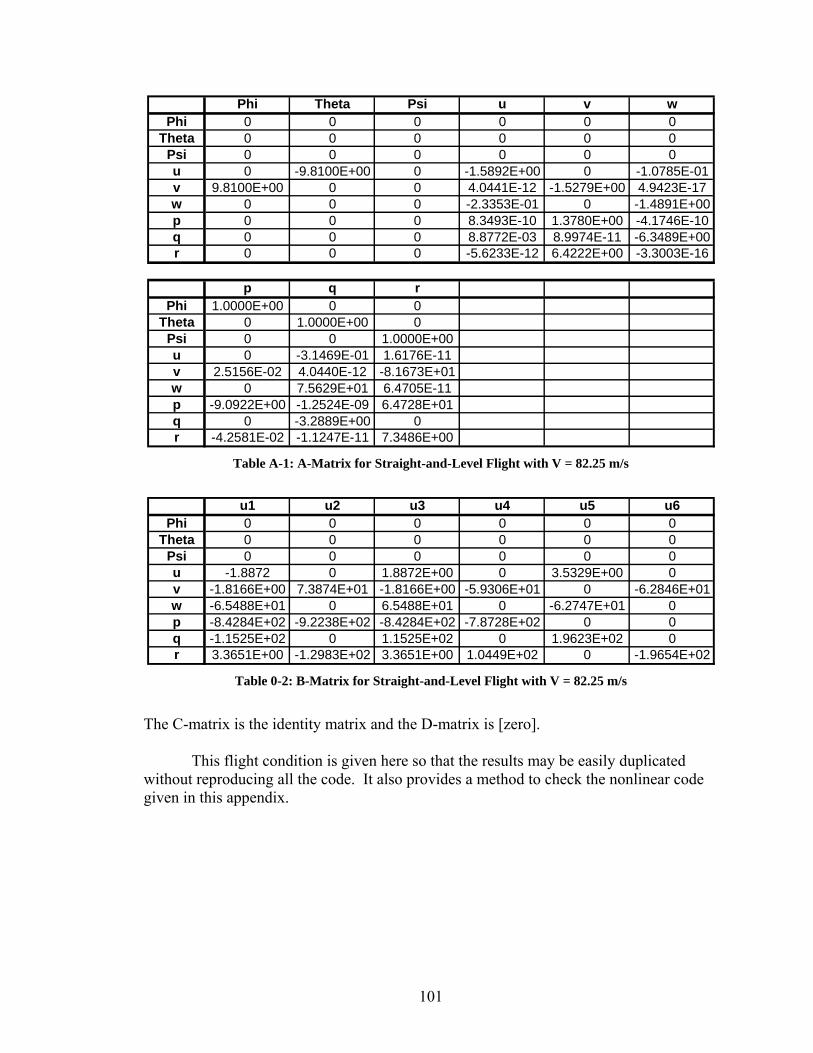
Phi Theta Psi u v wPhi 0 0 0 0 0 0
Theta 0 0 0 0 0 0Psi 0 0 0 0 0 0u 0 -9.8100E+00 0 -1.5892E+00 0 -1.0785E-01v 9.8100E+00 0 0 4.0441E-12 -1.5279E+00 4.9423E-17w 0 0 0 -2.3353E-01 0 -1.4891E+00p 0 0 0 8.3493E-10 1.3780E+00 -4.1746E-10q 0 0 0 8.8772E-03 8.9974E-11 -6.3489E+00r 0 0 0 -5.6233E-12 6.4222E+00 -3.3003E-16
p q rPhi 1.0000E+00 0 0
Theta 0 1.0000E+00 0Psi 0 0 1.0000E+00u 0 -3.1469E-01 1.6176E-11v 2.5156E-02 4.0440E-12 -8.1673E+01w 0 7.5629E+01 6.4705E-11p -9.0922E+00 -1.2524E-09 6.4728E+01q 0 -3.2889E+00 0r -4.2581E-02 -1.1247E-11 7.3486E+00
Table A-1: A-Matrix for Straight-and-Level Flight with V = 82.25 m/s
u1 u2 u3 u4 u5 u6
Phi 0 0 0 0 0 0Theta 0 0 0 0 0 0
Psi 0 0 0 0 0 0u -1.8872 0 1.8872E+00 0 3.5329E+00 0v -1.8166E+00 7.3874E+01 -1.8166E+00 -5.9306E+01 0 -6.2846E+01w -6.5488E+01 0 6.5488E+01 0 -6.2747E+01 0p -8.4284E+02 -9.2238E+02 -8.4284E+02 -7.8728E+02 0 0q -1.1525E+02 0 1.1525E+02 0 1.9623E+02 0r 3.3651E+00 -1.2983E+02 3.3651E+00 1.0449E+02 0 -1.9654E+02
Table 0-2: B-Matrix for Straight-and-Level Flight with V = 82.25 m/s
The C-matrix is the identity matrix and the D-matrix is [zero]. This flight condition is given here so that the results may be easily duplicated without reproducing all the code. It also provides a method to check the nonlinear code given in this appendix.
101
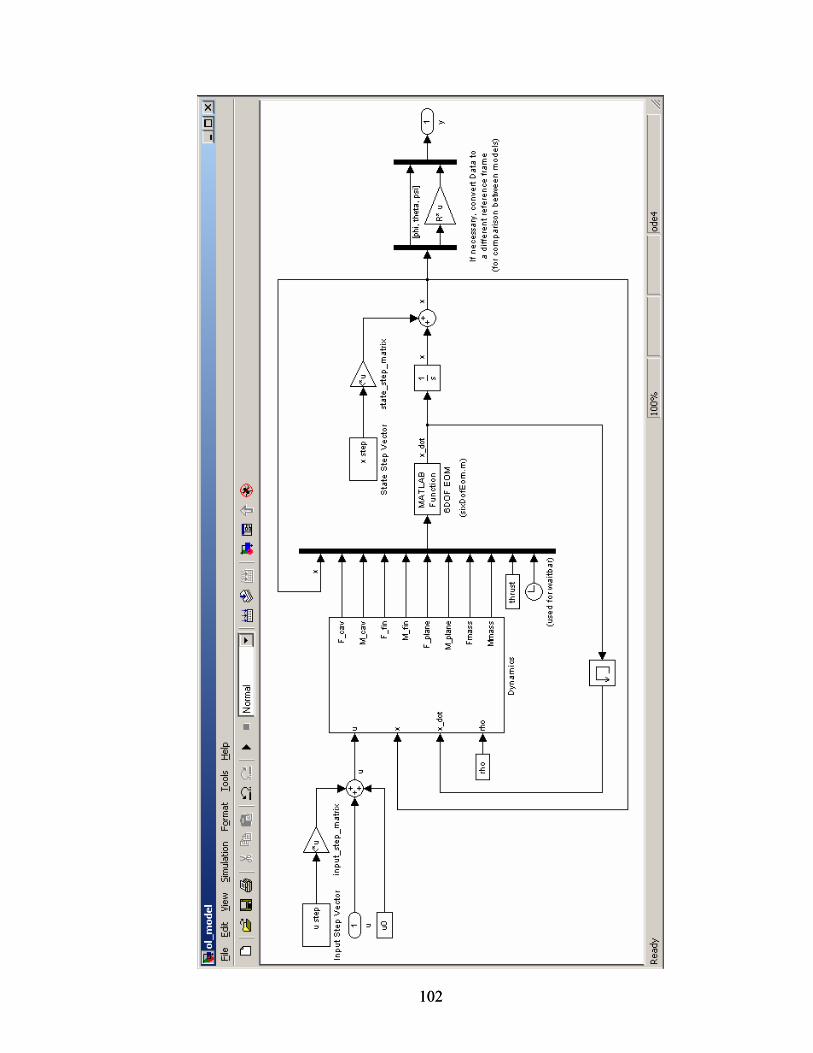
102 102
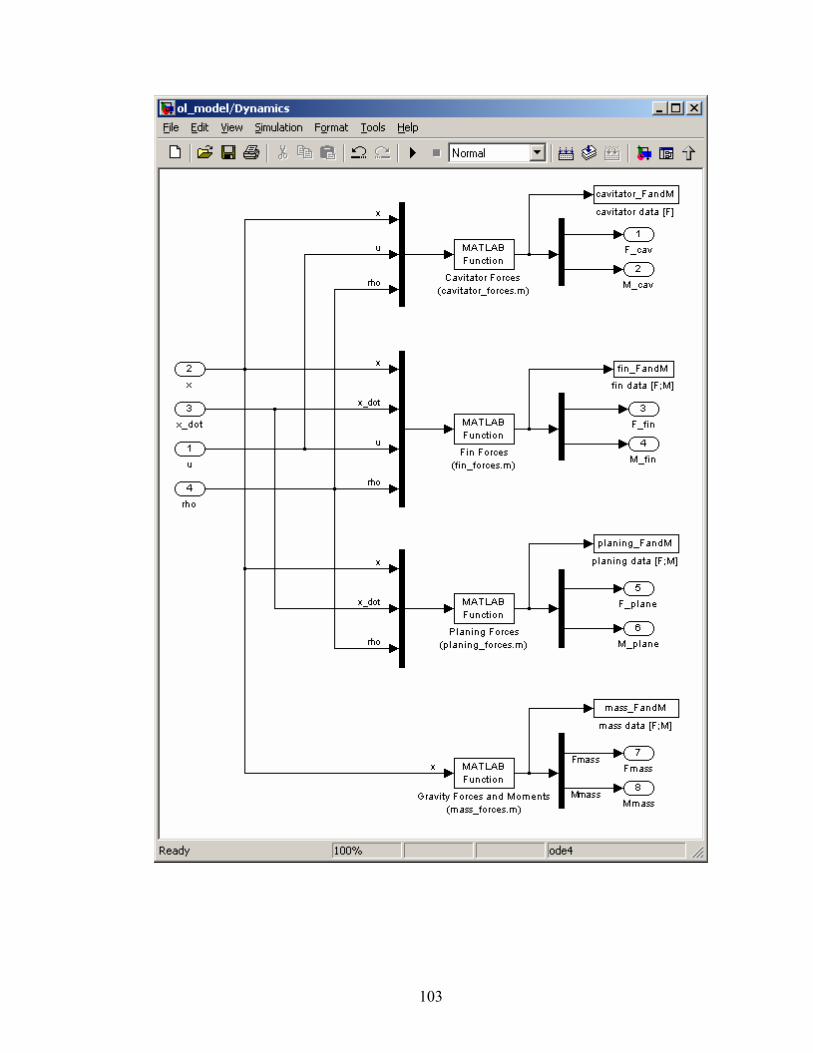
103
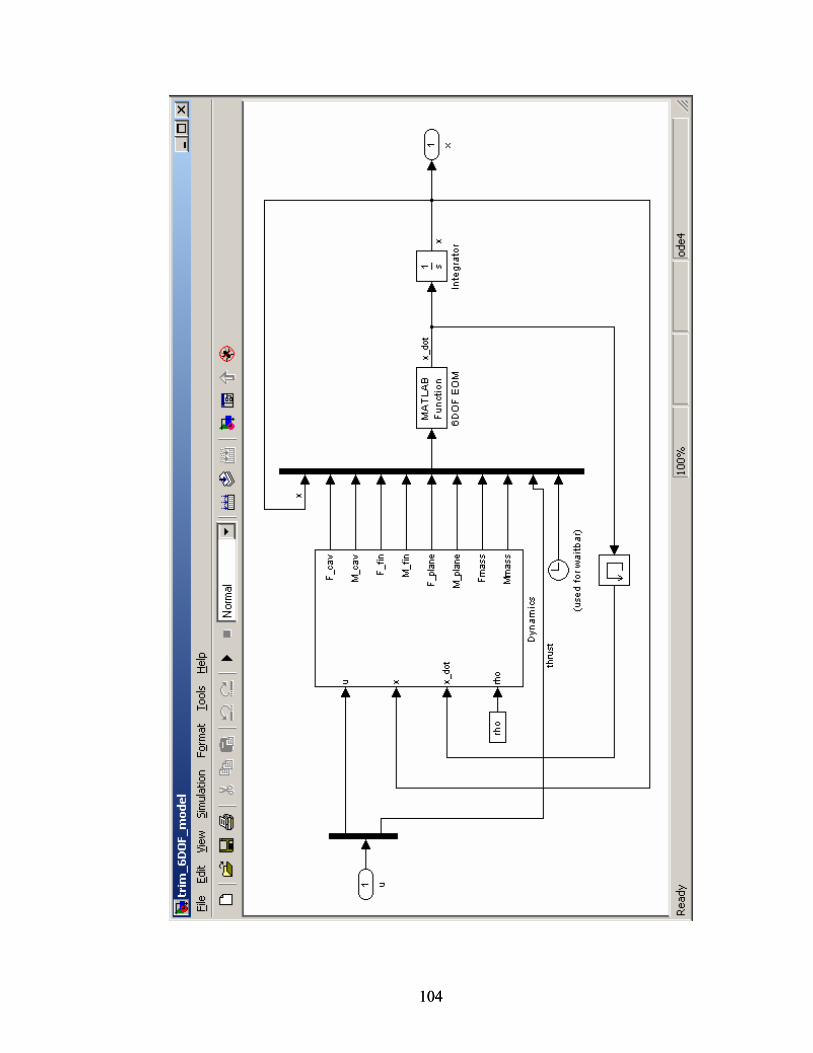
104 104
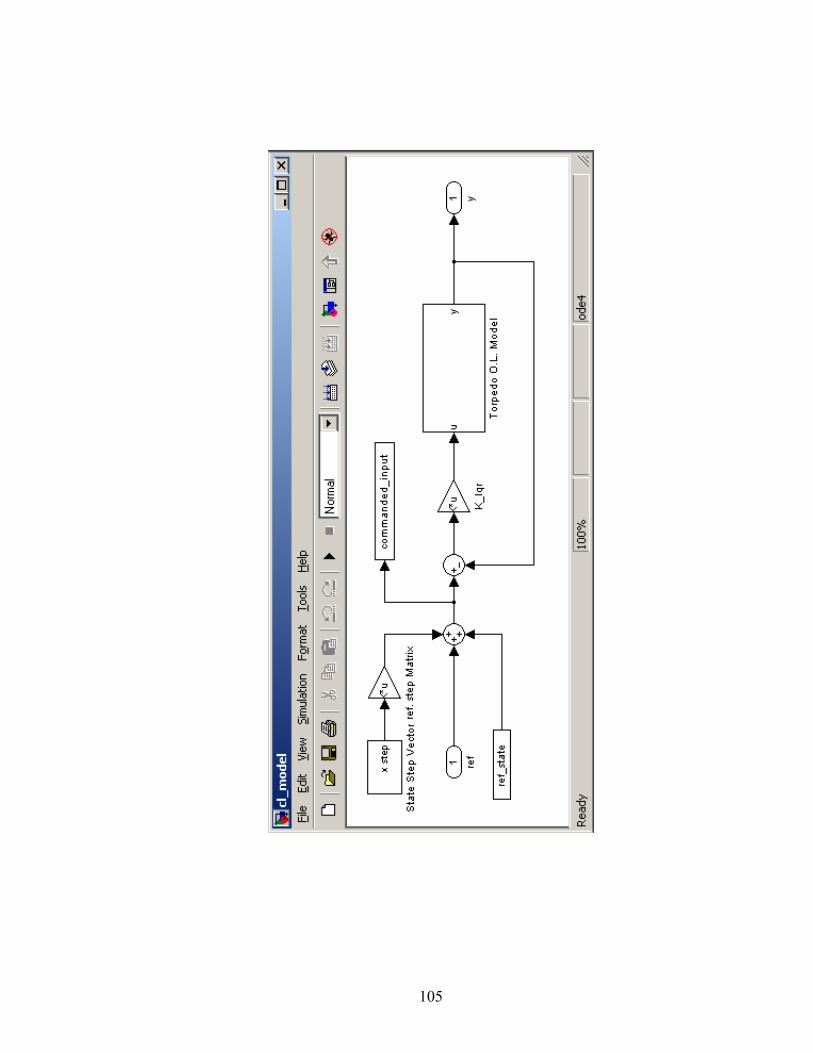
105
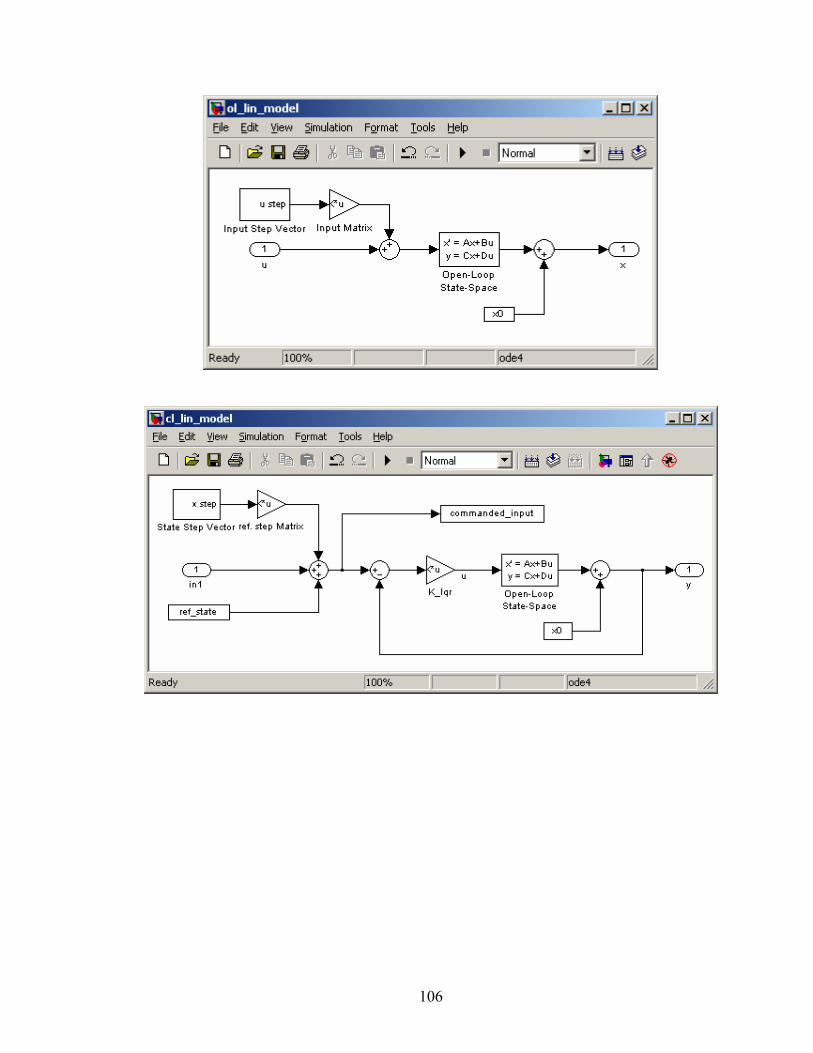
106
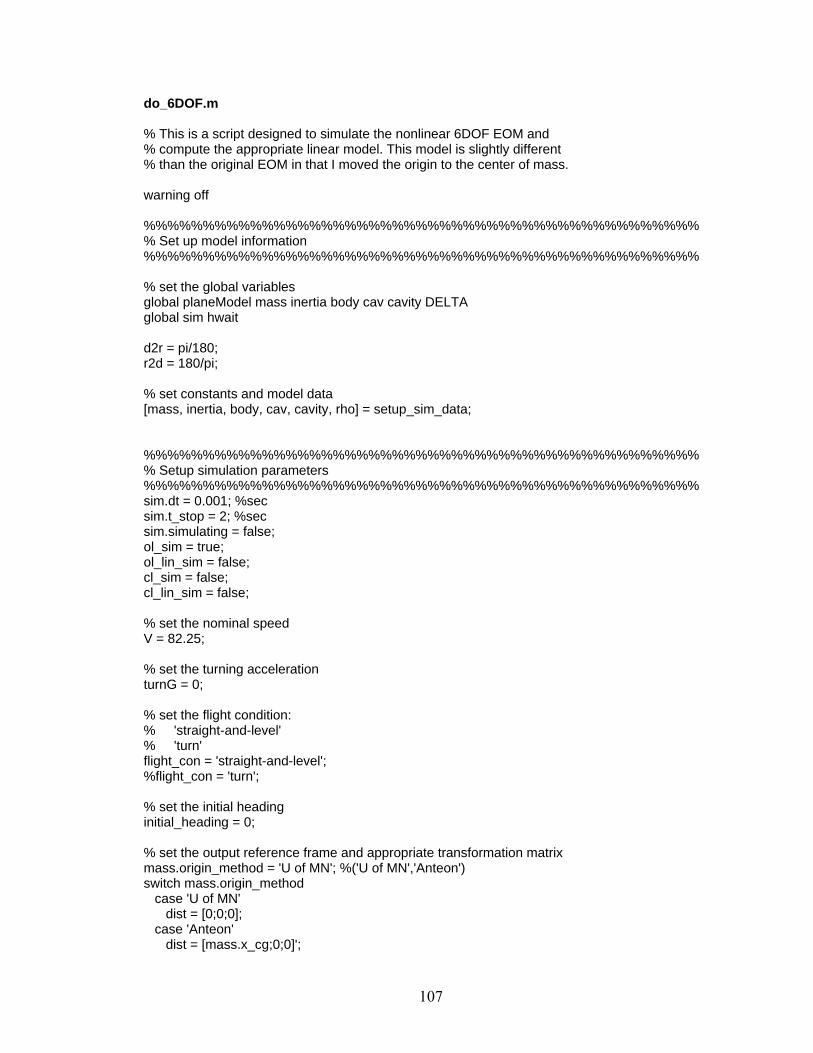
do_6DOF.m % This is a script designed to simulate the nonlinear 6DOF EOM and % compute the appropriate linear model. This model is slightly different % than the original EOM in that I moved the origin to the center of mass. warning off %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Set up model information %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % set the global variables global planeModel mass inertia body cav cavity DELTA global sim hwait d2r = pi/180; r2d = 180/pi; % set constants and model data [mass, inertia, body, cav, cavity, rho] = setup_sim_data; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Setup simulation parameters %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% sim.dt = 0.001; %sec sim.t_stop = 2; %sec sim.simulating = false; ol_sim = true; ol_lin_sim = false; cl_sim = false; cl_lin_sim = false; % set the nominal speed V = 82.25; % set the turning acceleration turnG = 0; % set the flight condition: % 'straight-and-level' % 'turn' flight_con = 'straight-and-level'; %flight_con = 'turn'; % set the initial heading initial_heading = 0; % set the output reference frame and appropriate transformation matrix mass.origin_method = 'U of MN'; %('U of MN','Anteon') switch mass.origin_method case 'U of MN' dist = [0;0;0]; case 'Anteon' dist = [mass.x_cg;0;0]';
107
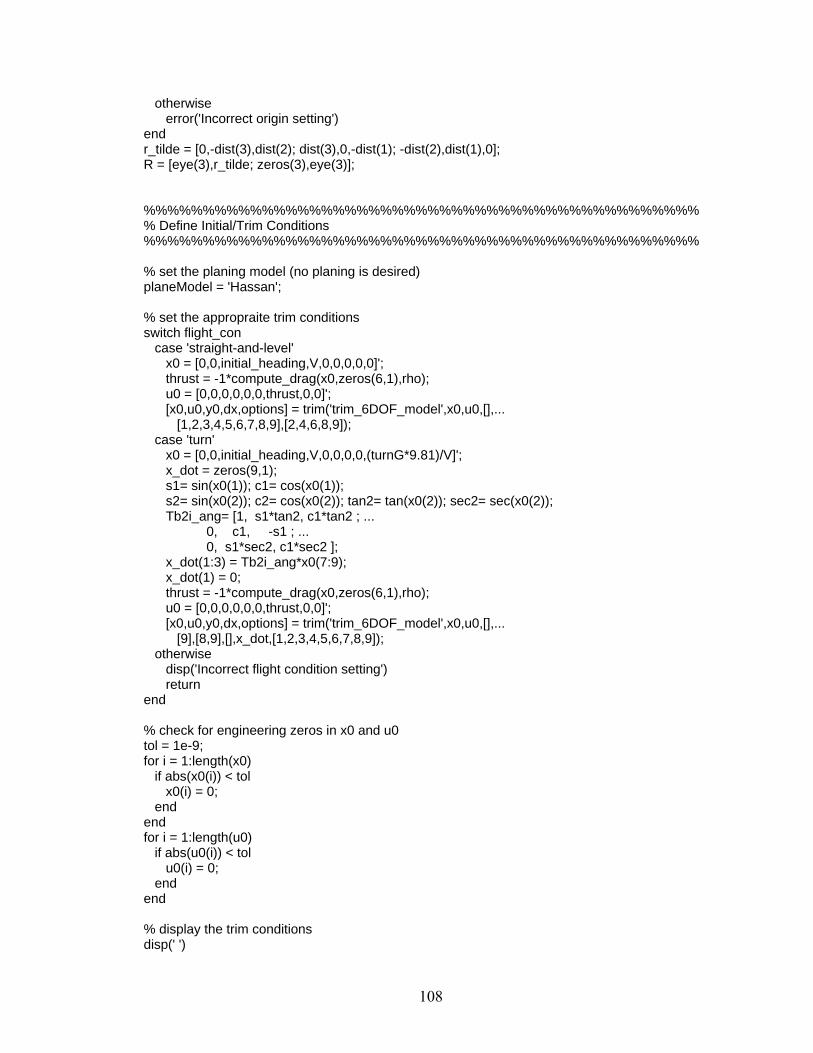
otherwise error('Incorrect origin setting') end r_tilde = [0,-dist(3),dist(2); dist(3),0,-dist(1); -dist(2),dist(1),0]; R = [eye(3),r_tilde; zeros(3),eye(3)]; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Define Initial/Trim Conditions %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % set the planing model (no planing is desired) planeModel = 'Hassan'; % set the appropraite trim conditions switch flight_con case 'straight-and-level' x0 = [0,0,initial_heading,V,0,0,0,0,0]'; thrust = -1*compute_drag(x0,zeros(6,1),rho); u0 = [0,0,0,0,0,0,thrust,0,0]'; [x0,u0,y0,dx,options] = trim('trim_6DOF_model',x0,u0,[],... [1,2,3,4,5,6,7,8,9],[2,4,6,8,9]); case 'turn' x0 = [0,0,initial_heading,V,0,0,0,0,(turnG*9.81)/V]'; x_dot = zeros(9,1); s1= sin(x0(1)); c1= cos(x0(1)); s2= sin(x0(2)); c2= cos(x0(2)); tan2= tan(x0(2)); sec2= sec(x0(2)); Tb2i_ang= [1, s1*tan2, c1*tan2 ; ... 0, c1, -s1 ; ... 0, s1*sec2, c1*sec2 ]; x_dot(1:3) = Tb2i_ang*x0(7:9); x_dot(1) = 0; thrust = -1*compute_drag(x0,zeros(6,1),rho); u0 = [0,0,0,0,0,0,thrust,0,0]'; [x0,u0,y0,dx,options] = trim('trim_6DOF_model',x0,u0,[],... [9],[8,9],[],x_dot,[1,2,3,4,5,6,7,8,9]); otherwise disp('Incorrect flight condition setting') return end % check for engineering zeros in x0 and u0 tol = 1e-9; for i = 1:length(x0) if abs(x0(i)) < tol x0(i) = 0; end end for i = 1:length(u0) if abs(u0(i)) < tol u0(i) = 0; end end % display the trim conditions disp(' ')
108
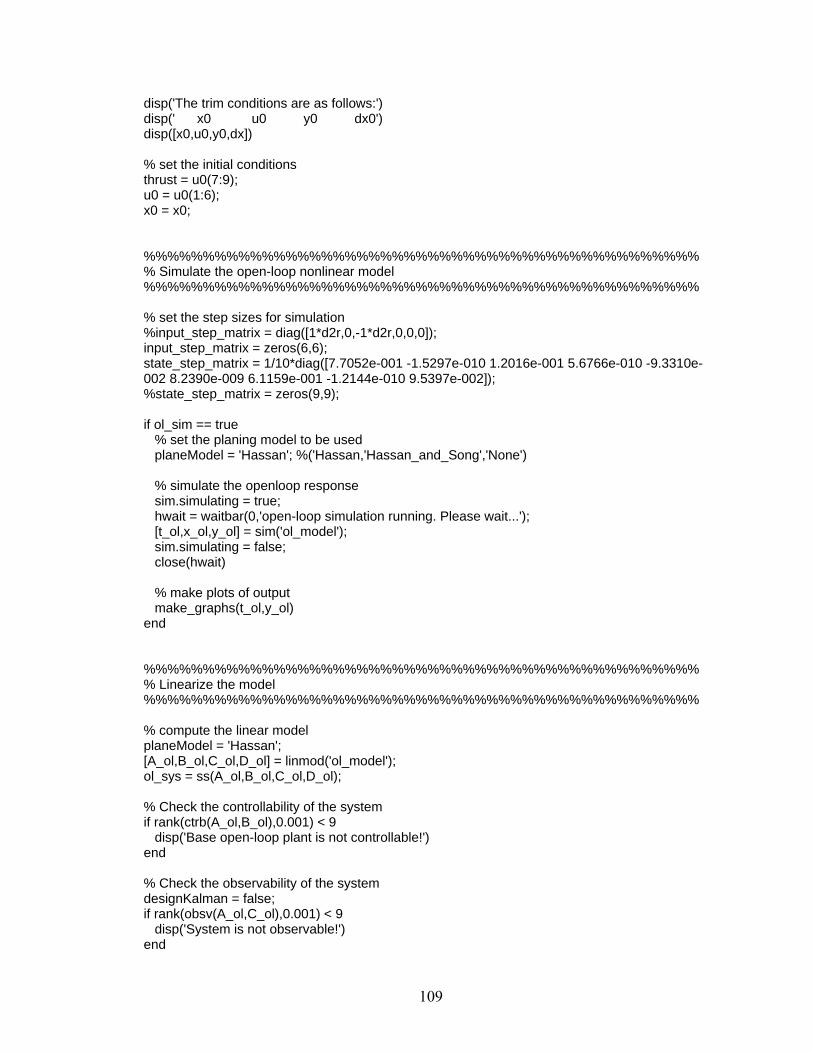
disp('The trim conditions are as follows:') disp(' x0 u0 y0 dx0') disp([x0,u0,y0,dx]) % set the initial conditions thrust = u0(7:9); u0 = u0(1:6); x0 = x0; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Simulate the open-loop nonlinear model %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % set the step sizes for simulation %input_step_matrix = diag([1*d2r,0,-1*d2r,0,0,0]); input_step_matrix = zeros(6,6); state_step_matrix = 1/10*diag([7.7052e-001 -1.5297e-010 1.2016e-001 5.6766e-010 -9.3310e-002 8.2390e-009 6.1159e-001 -1.2144e-010 9.5397e-002]); %state_step_matrix = zeros(9,9); if ol_sim == true % set the planing model to be used planeModel = 'Hassan'; %('Hassan,'Hassan_and_Song','None') % simulate the openloop response sim.simulating = true; hwait = waitbar(0,'open-loop simulation running. Please wait...'); [t_ol,x_ol,y_ol] = sim('ol_model'); sim.simulating = false; close(hwait) % make plots of output make_graphs(t_ol,y_ol) end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Linearize the model %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % compute the linear model planeModel = 'Hassan'; [A_ol,B_ol,C_ol,D_ol] = linmod('ol_model'); ol_sys = ss(A_ol,B_ol,C_ol,D_ol); % Check the controllability of the system if rank(ctrb(A_ol,B_ol),0.001) < 9 disp('Base open-loop plant is not controllable!') end % Check the observability of the system designKalman = false; if rank(obsv(A_ol,C_ol),0.001) < 9 disp('System is not observable!') end
109
% display the eigen value data [ol_eigVec,ol_eigVal] = eig(A_ol); disp(' ') disp('The open-loop plant eigenvalues are:') rifd(eig(A_ol)) % disp(' ') % disp('The open-loop plant eigenvectors are:') % ol_eigVec % make a pole-zero map figure pzmap(ol_sys) grid on title('Open-Loop Pole-Zero Map') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % simulate the Open-Loop linearized model %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% if ol_lin_sim == true [t_ol_lin,x_ol_lin,y_ol_lin] = sim('ol_lin_model'); % make plots of output make_graphs(t_ol_lin,y_ol_lin) % compare liner and nonliner sim results if ol_sim == true make_comp_graphs(t_ol,y_ol,y_ol_lin); end end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Design the controller(s) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Q = diag([1,1,1,0,0,0,.1,.5,.1]); R = diag([1,1,1,1,.1,.1]); [K_lqr,S,cl_eigVal_lqr] = lqr(A_ol,B_ol,Q,R); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Simulate the closed-loop nonlinear system %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % set the step command values ref_step_matrix = diag([0,0,0,0,0,0,0,0,1*d2r]); ref_state = x0; if cl_sim == true % simulate the closed-loop response planeModel = 'Hassan'; hwait = waitbar(0,'Closed-loop simulation running. Please wait...'); sim.simulating = true;
110
[t_cl,x_cl,y_cl] = sim('cl_model'); sim.simulating = false; close(hwait) % plot the output make_graphs(t_cl,y_cl) end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Linearize the closed-loop system %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % compute the linear model planeModel = 'None'; [A_cl,B_cl,C_cl,D_cl] = linmod('cl_model'); cl_sys = ss(A_cl,B_cl,C_cl,D_cl); % display the eigen value data [cl_eigVec,cl_eigVal] = eig(A_cl); disp(' ') disp('The closed-loop system eigenvalues are:') rifd(eig(A_cl)) % make a pole-zero map figure pzmap(cl_sys) grid on title('Closed-Loop Pole-Zero Map') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % simulate the closed-loop linearized model %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% if cl_lin_sim == true [t_cl_lin,x_cl_lin,y_cl_lin] = sim('cl_lin_model'); % make plots of output make_graphs(t_cl_lin,y_cl_lin) % compare liner and nonliner sim results if cl_sim == true make_comp_graphs(t_cl,y_cl,y_cl_lin); end end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Transform the system to examine multi-variable inner-loop (p,q,r) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Define ol system G_ss = minreal(ss(A_ol,B_ol,C_ol,D_ol)); G_tf = minreal(tf(G_ss));
111
%Define the transformation Ct = zeros(3,9); Ct(1:3,7:9) = eye(3); Dt = zeros(3,3); T = Ct*B_ol; T_inv = pinv(T); %Define the transformed system [Gt_ss,U] = minreal(ss(A_ol,B_ol*T_inv,Ct,Dt)) Gt_tf = minreal(tf(Gt_ss)); % display the transformed system information disp(' ') disp('The transformed system poles are:') rifd(pole(Gt_ss)) disp(' ') disp('The transformed transmision zeros are:') rifd(zero(Gt_ss)) figure pzmap(Gt_ss) grid on title('Pole-Zero Map of Transformed Multivariable System') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Transform the system to examine multi-variable inner-loop (p,q,r) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % find the individual loop information p_tf = minreal(Gt_tf(1,1)); p_ss = minreal(ss(p_tf)); p_tf = minreal(tf(p_ss)); q_tf = minreal(Gt_tf(2,2)); q_ss = minreal(ss(q_tf)); q_tf = minreal(tf(q_ss)); r_tf = minreal(Gt_tf(3,3)); r_ss = minreal(ss(r_tf)); r_tf = minreal(tf(q_ss)); % display the loop information disp(' ') disp('The info for transformed ol p/p_cmd is:') p_tf [z,p,k] = zpkdata(p_tf,'v') disp(' ') disp('The info for transformed ol q/q_cmd is:') q_tf [z,p,k] = zpkdata(q_tf,'v') disp(' ') disp('The info for transformed ol r/r_cmd is:')
112

r_tf [z,p,k] = zpkdata(r_tf,'v')
113

setup_sim_data.m function [mass, inertia, body, cav, cavity, rho] = setup_sim_data() global DELTA %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Define the uncertain parameters and the their associated range of values % (in percent difference) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % uncertainty in cavitator Cd0 DELTA.Cd0_range = [-.05 0 0.05]; % +/- 5% DELTA.Cd0_rval = 2; % uncertainty in the fin force and moment coefficients DELTA.Cfin_range = [-.13, 0, .13; -.17, 0, .17; -.12, 0, .12; -.15, 0, .15; -.14, 0, .14; -.18, 0, .18]; DELTA.Cfin_rval = 2; DELTA.Cfin_coef = 1; % uncertainty in the cavitation number DELTA.sigma_range = [-.029 0 .029]; DELTA.sigma_rval = 2; % uncertainty in the position of the center of gravity. This could account % for variations in mass as fuel is depleted much like an aircraft deals % with forward-heavy and aft-light conditions. DELTA.xcg_range = [-.1 0 .1]; %+/- 10% DELTA.xcg_rval = 2; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % define the water density % NOTE: This constant should actually become a function since the density % changes with water depth %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% rho = 1024; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % torpedo body related constants (geometry) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % maximum dimensions body.L = 4.064; % overall body length [m] body.R = 0.1015; % maximum body radius [m] % body/section lengths (aft of cavitator) secL = [0.0625, 0.2500, 0.59375, 0.09375]; xlast = 0; for i = 1:4 body.x1(i) = xlast; body.x2(i) = xlast + secL(i)*body.L;
114
xlast = body.x2(i); end % define the body's radii body.r1 = [0.345, 0.5, 1.0, 0.375]*body.R; body.r2 = [0.345, 1.0, 1.0, 0.500]*body.R; % fin data body.fin.x_piv = 0.85*body.L; %location of fins (aft of cavitator) body.fin.r_piv = 0.9*body.R; %pivot point of fins (out from centerline) body.fin.Phi = (pi/180)*[0,90,180,270]; %angular locations of fins body.fin.swp = 45*(pi/180); %fin sweep angle body.fin.b = 0.14; %fin span (m) % define the sections of the body that are assumed to incurr planing forces body.planeSec = [0,0,1,0]; %sections that are presumed to plane body.nSec = 4; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % mass and inertia related constants %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% mass.m = 175.7; % Nominal body mass (kg) mass.g = 9.81; %m/sec^2 mass.origin_method = 'U of MN'; %('U of MN','Anteon') inertia = set_inertia(body,mass); mass.x_cg = inertia.x_cg; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Disk Cavitator constants %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% cav.Cd0 = 0.805; cav.R = 0.0350; cav.D = 2*cav.R; cav.sigma = 0.029; %cavitation number assumed constant cav.model = 'U of MN'; %('U of MN','Anteon') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % cavity subsection information % NOTE: This section is intended for use with delays states to compute the % cavity centerline and local radii % % This data is only used int he "complex" models %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% [Rc,Lc] = max_cavity_dimensions(cav); cavity.n = 10; %NOTE: if this number changes, the number of modeled delays %has to change in the simulink file cavity.dx = Lc/cavity.n;
115
cavitator_forces.m function [out] = cavitator_forces(in) global cav mass DELTA % Compute the cavitator forces and moments acting in the by-direction % set the input eul = in(1:3); %[phi,theta,psi] vel = in(4:6); %[u,v,w] omg = in(7:9); %[p,q,r] delta = in(10:15); rho = in(16); u = vel(1); v = vel(2); w = vel(3); p = omg(1); q = omg(2); r = omg(3); delta_pitch = delta(5); delta_yaw = delta(6); % define the effectiveness of the cavitator actuator motion tau = 1; % compute alpha and beta from the velocity vector [alpha,beta] = compute_alpha_beta(vel); % set the moment arm arm = mass.x_cg; %(forward of cg) % set the apparent sideslip angle alpha_flow = -arm*q/norm(vel); beta_flow = arm*r/norm(vel); alpha_cav = alpha + alpha_flow - tau*delta_pitch; beta_cav = beta + beta_flow - tau*delta_yaw; % add any uncertain terms Cd0 = cav.Cd0 + cav.Cd0*DELTA.Cd0_range(DELTA.Cd0_rval); sigma = cav.sigma + cav.sigma*DELTA.sigma_range(DELTA.sigma_rval); % compute the normal force to the disk switch cav.model case 'U of MN' Fp = 0.5*rho*norm(vel)^2*(pi*cav.R^2)*Cd0*(1+sigma+0.028*sigma^2); % define some transformation matrices T1 = [ cos(beta_cav), sin(beta_cav), 0; -sin(beta_cav), cos(beta_cav), 0; 0, 0, 1]; T2 = [ cos(alpha_cav), 0, sin(alpha_cav); 0, 1, 0; -sin(alpha_cav), 0, cos(alpha_cav)]; T = T2*T1; % compute the body components of the normal force Fcav = T*[-Fp,0,0]';
116
case 'Anteon' % Force perpendicular to disk, drag reduced for apparent angles of attack Fp= 0.5*rho*norm(vel)^2*(pi*cav.R^2) * ... Cd0*(1+sigma+.028*sigma^2)*cos(alpha_cav)*cos(beta_cav); % Forces in body-frame of reference fx= -Fp*cos(delta_pitch)*cos(delta_yaw); fy= -Fp*cos(delta_pitch)*sin(delta_yaw); fz= Fp*sin(delta_pitch); Fcav = [fx,fy,fz]'; otherwise disp('Unknown cavitator model') end % compute the moments caused by the cavitator Mcav = cross([arm,0,0]',Fcav); % set the output out = [Fcav; Mcav]; return
117
fin_forces.m function [out] = fin_forces(in) global mass body DELTA % Compute the total fin forces and their components in the body axis % Constants r2d = 180/pi; d2r = pi/180; % define the states, state derivatives, and input x = in(1:9); %states x_dot = in(10:18); %state derivatives delta = in(19:24); %[uf1,uf2,uf3,uf4,ucp,ucy] rho = in(25); eul = x(1:3); %[phi,theta,psi] vel = x(4:6); %[u,v,w] omg = x(7:9); %[p,q,r] u = vel(1); v = vel(2); w = vel(3); p = omg(1); q = omg(2); r = omg(3); % compute alpha and beta [alpha,beta] = compute_alpha_beta(vel); % compute the cavity dimensions at the fins [yfin_c,zfin_c,rfin_c] = local_cav_dimensions(x,x_dot,body.fin.x_piv); % CALCULATE THE FIN IMMERSION r_tip = body.fin.b+body.fin.r_piv; % calulate the forces for each fin F_fin = zeros(3,1); M_fin = zeros(3,1); for i = 1:4 % Determine the local centerline for each fin ycen(i) = yfin_c*cos(body.fin.Phi(i)) + zfin_c*sin(body.fin.Phi(i)); zcen(i) = -yfin_c*sin(body.fin.Phi(i)) + zfin_c*cos(body.fin.Phi(i)); % Find the intersection of the cavity and the local fin yR(i) = sqrt(rfin_c^2-zcen(i)^2); % Calculate the fin immersion imm(i) = 0.7 * (r_tip-(ycen(i)+yR(i)))/body.fin.b + 0.3; if imm(i) < 0 imm(i) = 0; %disp('Warning: Saturated Fin Immersion') elseif imm(i) > 1 imm(i) = 1; %disp('Warning: Saturated Fin Immersion') end % Calculate the apparent sweep
118
swp_f(i) = body.fin.swp - ... (alpha*sin(body.fin.Phi(i)) + beta*cos(body.fin.Phi(i))); % COMPUTE THE APPARENT ANGLE OF ATTACK % Calculate the approximate center of effect on the submerged portion % of the fin xf(i) = body.fin.x_piv + body.fin.b*(1-imm(i)/2)*sin(swp_f(i)); rf(i) = body.fin.r_piv + body.fin.b*(1-imm(i)/2)*cos(swp_f(i)); yf(i) = rf(i)*cos(body.fin.Phi(i)); zf(i) = rf(i)*sin(body.fin.Phi(i)); % Compute the apparent flow angles in the body-fixed frame x_fin = xf(i) - mass.x_cg; %(aft of cg) alpha_yb = alpha + (q*x_fin + p*yf(i))/norm(vel); alpha_zb = -beta + (-r*x_fin + p*zf(i))/norm(vel); % transform y-component (parallel to flow) t0 LSCAV frame a_LSCAV(i) = alpha_yb*cos(body.fin.Phi(i))+alpha_zb*sin(body.fin.Phi(i)); % add fin actuator angle to compute final angle of attack atk(i) = a_LSCAV(i) + delta(i)*cos(swp_f(i)); % COMPUTE THE FIN FORCE AND MOMENT COEFFICIENTS load LS_finCoef8; %coefficients for LS equations % for coef = 1:6 % finCoef(coef) = LS_finCoef6(coef,1)*(atk(i)*r2d)^2 + ... % LS_finCoef6(coef,2)*atk(i)*r2d*imm(i) + ... % LS_finCoef6(coef,3)*imm(i)^2 + ... % LS_finCoef6(coef,4)*atk(i)*r2d + ... % LS_finCoef6(coef,5)*imm(i) + ... % LS_finCoef6(coef,6); % end for coef = 1:6 finCoef(coef) = LS_finCoef8(coef,1)*(atk(i)*r2d)^3 + ... LS_finCoef8(coef,2)*imm(i)^3 + ... LS_finCoef8(coef,3)*(atk(i)*r2d)^2*imm(i) + ... LS_finCoef8(coef,4)*(atk(i)*r2d)*imm(i)^2 + ... LS_finCoef8(coef,5)*(atk(i)*r2d)*imm(i) + ... LS_finCoef8(coef,6)*(atk(i)*r2d) + ... LS_finCoef8(coef,7)*imm(i) + ... LS_finCoef8(coef,8); end % Add the coefficient uncertainty finCoef(DELTA.Cfin_coef) = finCoef(DELTA.Cfin_coef) + ... finCoef(DELTA.Cfin_coef)*DELTA.Cfin_range(DELTA.Cfin_coef,DELTA.Cfin_rval); % Dimensionalize the Force and moment Coefficients qbar_f = 0.5*rho*norm(vel)^2*body.fin.b^2; arm = abs(mass.x_cg-body.fin.x_piv); F = qbar_f*[finCoef(1:3)]'; M = qbar_f*body.fin.b*[finCoef(4:6)]' + ... cross([arm,0,0]',F);
119
% rotate the forces and moments into the corect body axis ci = cos(body.fin.Phi(i)); si = sin(body.fin.Phi(i)); F_fin(1) = F_fin(1) - F(1); F_fin(2) = F_fin(2) + F(2)*ci + F(3)*si; F_fin(3) = F_fin(3) + F(2)*si - F(3)*ci; M_fin(1) = M_fin(1) - M(1); M_fin(2) = M_fin(2) + M(2)*ci + M(3)*si; M_fin(3) = M_fin(3) + M(2)*si - M(3)*ci; end out = [F_fin;M_fin]; return
120
planing_forces.m function [out] = planing_forces(in) global planeModel body cav mass % Evaluates the immersion of the transom and resulting forces. % Typically only the midbody and tail will be examined. % % Fplane(1:3)= [Fx,Fy,Fz]' Mplane(1:3)= [Mx,My,Mz]' % % Hassan's forces and moments are computed at the transom % centerline with the x-axis pointing along the body toward % the nose and the y-axis pointing to starboard (right) so % that the z-axis points below. % % ref: NUWC-NOT Technical Memorandum 990085 % Scott E. Hassan, "Analysis of Hydrodynamic Planing Forces % Associated with Cavity Riding Vehicles", July, 1999. % define the input x = in(1:9); %states x_dot = in(10:18); %state derivatives rho = in(19); eul = x(1:3); %[phi,theta,psi] vel = x(4:6); %[u,v,w] omg = x(7:9); %[p,q,r] u = vel(1); v = vel(2); w = vel(3); p = omg(1); q = omg(2); r = omg(3); p_dot = x_dot(7); q_dot = x_dot(8); r_dot = x_dot(9); % initialize the forces and moments Fplane = [0,0,0]'; Mplane = [0,0,0]'; % Assume that the only section of the hull that planes is the third % section, the cylindrical hull portion pSec = 3; % define transom position and determine immersion there xTransom = body.x2(pSec); planeLength = 0; [hTransom,aTransom] = body_immersion(x,x_dot,xTransom,pSec,body); % if the tail/transom of the torpedo is dry, skip to the end of the % loop if ((hTransom > 0) & (body.planeSec(pSec) == 1)) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Determine planing depth & length, immersion angle, contact angle %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % find the entry point along the x-axis where the body becomes wet % (or where the body breaks the cavity wall, where immDepth == 0) xFwd = body.x1(pSec); [hFwd,aFwd] = body_immersion(x,x_dot,xFwd,pSec,body);
121
if (hFwd*hTransom > 0) warning('Not a wedge-type immersion.') xEntry = xFwd; else if (hFwd == 0) xEntry = xFwd; else xguess = [xTransom,xFwd]; warning off MATLAB:fzero:UndeterminedSyntax xEntry = fzero('immersion_depth',xguess,[],x,x_dot,pSec,body); if ((xEntry > xTransom) | (xEntry < xFwd)) error('Entry root outside bounds.'); end end end [hEntry,aEntry] = body_immersion(x,x_dot,xEntry,pSec,body); % Find the depth of the immersed planing region if (hTransom > body.r2(pSec)) warning('Transom submergence is greater than body radius.') planeDepth = body.r2(pSec); else planeDepth = hTransom; end % Find the length of the immersed planing region planeLength = xTransom-xEntry; if planeLength > body.x2(pSec)-body.x1(pSec) warning('Planing length is longer than currect planing section.') planeLength = body.x2(pSec)-body.x1(pSec); end % determine the body's contact angles planeIncline = atan2(planeDepth,planeLength); planeContact = 0.25*(aEntry+3.*aTransom); % a conical average, % weighted to the % transom % display the planing length and contact angle (the angle around % the x-axis that defines the location of the planing forces) disp(sprintf(' planing: length = %11.4e, contact = %10.1f',... planeLength,planeContact*180/pi)); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Planing Forces and Moment, aligned with contact angle % moments about transom %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % calculate the skin friction drag kvisc = 1.4e-6; Cd = 0.031/(norm(vel)*planeLength/kvisc)^(1/7); % calculate force and moment components rTransom = body.r2(pSec); % transom radius % Cavity radius at transom
122
[junk,junk,Rc] = local_cav_dimensions(x,x_dot,xTransom); R = body.r2(pSec); dim = rho*pi*Rc^2*norm(vel)^2; del = Rc-rTransom; h0 = planeDepth; r2r = (rTransom+h0)/(rTransom+2*h0); sa = sin(planeIncline); ca = cos(planeIncline); ta = tan(planeIncline); % Normal pressure forces Fp = dim*sa*ca*(1-(del/(h0+del))^2)*r2r; Mp = dim*ca*ca*(h0^2/(h0+del))*r2r; Lp = (Mp/Fp); % note: this center is measured forward % from the transom of the planing section % Friction forces uc= sqrt(h0/del); us= 2/R*sqrt(del*h0); % note: corrected Hassan's result for Sw Sw= 4*R*del/ta * ((1+uc*uc)*atan(uc)-uc) + ... R^3/(2*del*ta) * ((us^2-0.5)*asin(us)+0.5*us*sqrt(1-us^2)); Ff= 0.5*rho*norm(vel)^2*ca*ca*Sw*Cd; % neglect moment for now Mf= 0; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Additional planing forces, acceleration and impact % % F_a = C_a*m_added*a % F_i = C_i*m_imapct*C*V_ang % % a Acceleration (some combination of p_dot or q_dot % V_ang angular velocity % m_added This is an added mass based on the geometry of the torpedo. % m_impact volume of displaced water as a result of the impact % C_a & C_i coefficients yet to be determined. % (Waiting for results from Dr. Charles Song) % C speed of sound in water %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% K_plane = 1; %some fration of the added mass Ca_plane = 1; %coefficient for acceleration forces Ci_plane = 0.5; %coefficient for impact forces C = 1500; %(m/s) approximate speed of sound in salt water % set the acceleration to some combination of r_dot and q_dot arm = abs(mass.x_cg-xTransom)-(1/3)*planeLength; V_ang = sqrt(r^2+q^2)*arm; a = sqrt(r_dot^2+q_dot^2)*arm; % Determine the volumes needed for m_added and m_impact n_sec = 20;
123
[Rc,Lc] = max_cavity_dimensions(cav); xc_sec = [0:Lc/n_sec:Lc]; rc_sec = []; yc_sec = []; zc_sec = []; for i = 1:n_sec [yc_sec(i),zc_sec(i),rc_sec(i)] = ... local_cav_dimensions(x,x_dot,xc_sec(i)); end vol_cavShell = 0; for i = 1:(n_sec-1) center_i1 = [xc_sec(i+1),yc_sec(i+1),zc_sec(i+1)]'; center_i = [xc_sec(i),yc_sec(i),zc_sec(i)]'; vol_cavShell = vol_cavShell + ... ((rc_sec(i+1)+rc_sec(i))/2)^2 * norm(center_i1-center_i); end vol_torpedo = 0; for i=1:4 vol_torpedo = vol_torpedo + ... ((body.r1(i)+body.r2(i))*body.R/2)^2 * ... (body.x2(i)-body.x1(i))*body.L; end [junk,junk,rEntry] = local_cav_dimensions(x,x_dot,xEntry); width = (pi/4)*(rEntry+rTransom); vol_wedge = (1/3)*planeLength*planeDepth*width; % projected area of the torpedo wetted area proj_area = 2*sqrt(rTransom^2-planeDepth^2); % masses m_added = K_plane*(vol_cavShell-vol_torpedo+vol_wedge); m_impact = rho*vol_wedge; % additional forces F_acc = Ca_plane*m_added*a; %acceleration forces F_im = Ci_plane*m_impact*C*V_ang*proj_area; %impact forces %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Rotate and shift from transom contact to body-frame % % Fx= Ff % Fy= -Fp*cos(contactAngle) % Fz= -Fp*sin(contactAngle) % Mx= 0 % My= (Mp+Mf)*sin(contactAngle) - xTransom*Fz % Mz= -(Mp+Mf)*cos(contactAngle) + xTransom*Fy %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % set the moment arm xPlane = xTransom-(1/3)*planeLength-mass.x_cg; % compute the forces and moments switch planeModel case 'Hassan'
124

Fplane = [Ff, -Fp*cos(planeContact), -Fp*sin(planeContact) ]'; Mplane = [0, (Mp+Mf)*sin(planeContact), -(Mp+Mf)*cos(planeContact)]'; Mplane = Mplane + cross([mass.x_cg-xPlane,0,0]',Fplane); case 'Hassan_and_Song' Fplane = [Ff, -(Fp+F_acc+F_im)*cos(planeContact), ... -(Fp+F_acc+F_im)*sin(planeContact) ]'; Mplane = [0, (Mp+Mf)*sin(planeContact), -(Mp+Mf)*cos(planeContact)]'; Mplane = Mplane + cross([mass.x_cg-xPlane,0,0]',Fplane); otherwise disp('The planing forces were not computed') end %switch end %if ((hTransom > 0) & (body.planeSec(i) == 1)) out = [Fplane; Mplane]; return
125
set_inertia.m function inertia = set_inertia(body,mass) % Set the inertia % % Currently only written for HSW testbed geometry with homogenous % mass distribution % % This is here (rather than in the setup file) because it is possible to % model the reduction in mass to use of fuel. % % See Analytical Dynamics by Haim Baruh for reference on how inertia was % computed. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % determine the x_cg of the torpedo as well as the mass of the individual % sections and the total mass %(only considers 2 section, Anteon Legacy code) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Forward cone (includes the cavitator portion of torpedo) L(1) = body.x2(2); R(1) = body.r2(2); vol(1) = (1/3)*pi*R(1)^2*L(1); xcg(1) = (3/4)*L(1); %aft of cavitator % midbody cylinder L(2) = body.x2(3)-body.x1(3); R(2) = body.r2(3); vol(2) = pi*R(2)^2*L(2); xcg(2) = body.x2(3)-0.5*L(2); % aft of cavitator % determine the mass of each section tot_vol = sum(vol); rho_b = mass.m/tot_vol; m(1) = vol(1)/tot_vol * mass.m; m(2) = vol(2)/tot_vol * mass.m; % determine the center of mass x_cg = (1/mass.m) * (m(1)*xcg(1)+m(2)*xcg(2)); %aft of cavitator inertia.x_cg = x_cg; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Determine the inertia about the center of gravity % origin = x_cg % % Inertia Matrix % % [Ixx -Ixy -Ixz % I = -Ixy Iyy -Iyz % -Ixz -Iyz Izz] % % Transformation matrix with a dummy transformation vector % (Parallel Axis Theorem)
126
% Tvec = [dx,dy,dz]; % Tmat = [ (dx^2+dy^2), -dx*dy, -dx*dz; % -dx*dy, (dx^2+dz^2), -dy*dz; % -dx*dz, -dy*dz, (dx^2+dy^2)]; % % such that I = Ig + m*Tmat %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % calculate the inertia of the cone (about cone's cg) Iyy = (3/20)*m(1)*R(1)^2 + (3/80)*m(1)*L(1)^2; Izz = Iyy; Ixx = (3/10)*m(1)*R(1)^2; Icone = diag([Ixx,Iyy,Izz]); % Transform the cone inertia to the origin dx = xcg(1) - x_cg; dy = 0; dz = 0; Tmat = [ (dy^2+dz^2), -dx*dy, -dx*dz; -dx*dy, (dx^2+dz^2), -dy*dz; -dx*dz, -dy*dz, (dx^2+dy^2)]; Icone = Icone + m(1)*Tmat; % calculate the inertia of the cylinder (about cylinder's cg) Iyy = (1/4)*m(2)*R(2)^2 + (1/12)*m(2)*L(2)^2; Izz = Iyy; Ixx = (1/2)*m(2)*R(2)^2; Icyl = diag([Ixx,Iyy,Izz]); % Transform the cylinder inertia to the origin dx = xcg(2) - x_cg; dy = 0; dz = 0; Tmat = [ (dy^2+dz^2), -dx*dy, -dx*dz; -dx*dy, (dx^2+dz^2), -dy*dz; -dx*dz, -dy*dz, (dx^2+dy^2)]; Icyl = Icyl + m(2)*Tmat; % Compute the total angular inertia inertia.J = Icone + Icyl;
127

mass_forces.m function [out] = mass_forces(in) global mass body inertia % gravity forces and moments % set the input eul = in(1:3); %[phi,theta,psi]' vel = in(4:6); %[u,v,w]' omg = in(7:9); %[p,q,r]' phi = eul(1); theta = eul(2); psi = eul(3); % Define the transformation matrix to bring the gavity forces to body % forces c1 = cos(phi); c2= cos(theta); c3= cos(psi); s1 = sin(phi); s2= sin(theta); s3= sin(psi); T_i2b = [ c3*c2, -c1*s3+c3*s1*s2, s1*s3+c3*c1*s2 ; ... s3*c2, c1*c3+s3*s1*s2, -s1*c3+s3*c1*s2 ; ... -s2, s1*c2, c1*c2]; T_b2i = T_i2b'; % compute the gravity forces and moments Fgrav = T_b2i*[0,0,mass.m*mass.g]'; Mgrav = zeros(3,1); % set the output out = [Fgrav; Mgrav]; return
128

sixDofEom.m function [out] = sixDofEom(in) global sim hwait mass body inertia % define the input eul = in(1:3); %[phi,theta,psi] vel = in(4:6); %[u,v,w] omg = in(7:9); %[p,q,r] Fcav = in(10:12); Mcav = in(13:15); Ffin = in(16:18); Mfin = in(19:21); Fplane = in(22:24); Mplane = in(25:27); Fmass = in(28:30); Mmass = in(31:33); thrust = in(34:36); t = in(37); phi = eul(1); theta = eul(2); psi = eul(3); % update the waitbar if sim.simulating == true waitbar(t/sim.t_stop,hwait) end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % compute the kinematics %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% s1= sin(phi); c1= cos(phi); s2= sin(theta); c2= cos(theta); tan2= tan(theta); sec2= sec(theta); Tb2i_ang= [1, s1*tan2, c1*tan2 ; ... 0, c1, -s1 ; ... 0, s1*sec2, c1*sec2 ]; eul_dot = Tb2i_ang*omg; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % compute the dynamics % % NOTE: The dynamics equations assumes that the reference frame % being used is about the cg %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % compute the moments produced by the thrust vector about the cg Mthrust = cross([body.L-mass.x_cg,0,0]',thrust); % compute the omega shorthand matrix p = omg(1); q = omg(2); r = omg(3); omg_tilde = [0,-r,q; r,0,-p; -q,p,0]; OMG = [-omg_tilde,zeros(3); zeros(3),-omg_tilde]; % compute the mass shorthand matrix M = [mass.m*eye(3),zeros(3); zeros(3),inertia.J];
129
% sum forces and moments about the cg Ftot = (Fmass+Fcav+Ffin+Fplane+thrust); Mtot = (Mmass+Mcav+Mfin+Mplane+Mthrust); % EOM accel = inv(M) * (OMG*M*[vel;omg] + [Ftot;Mtot]); vel_dot = accel(1:3); omg_dot = accel(4:6); % set the output out = [eul_dot; vel_dot; omg_dot];
130
body_immersion.m function [depth, angle] = body_immersion(x,x_dot,X,pSec,body) % This function calculates the torpedo body immersion % initialize output angle = 0; depth = 0; % calculate the slope of the body's radius x1 = body.x1(pSec); x2 = body.x2(pSec); r1 = body.r1(pSec); r2 = body.r2(pSec); Rb = (r1-r2)/(x1-x2)*(X-x2)+r2; % check that x is within body section if ((X > x2 | X < x1) & (X ~= x2) & (X ~= x1)) warning('Outside specified body section.'); return end % Interpolate cavity profile to find radius and center offset at chosen x % position (behind the cavitator) [yc,zc,rc] = local_cav_dimensions(x,x_dot,X); angle = pi + atan2(zc,yc); depth = Rb + (sqrt(yc^2+zc^2)-rc); return
131
cavity_info.m function [out] = cavity_info(r_vec,beta_dot_vec,V) global cavity % Calculate three sets of vectors representing the cavity centerline and % the local radii. These vectors will be used to interpret the local % cavity states at a given distance behind the cavitator. % define the x distance behind the cavitator xc(1) = 0; for i = 2:cavity.n xc(i) = xc(i-1)+cavity.dx; end % determine the sectional centerline offset and radii for i = 1:cavity.n x = [r_vec(i),0]; x_dot = [0,beta_dot_vec(i)]; [yc(i),zc(i),rc(i)] = local_cav_dimensions(x,x_dot,xc(i),V); end % define the output out = [xc, yc, zc, rc];
132

compute_alpha_beta.m function [alpha,beta] = compute_alpha_beta(vel) % compute alpha and beta as defined by Etkin (pg 10-11) u = vel(1); v = vel(2); w = vel(3); speed = norm(vel); alpha = atan2(w,u); beta = asin(v/speed); return;
133

compute_drag.m function drag = compute_drag(x,u,rho) % set the global variables global planeModel mass inertia body cav cavity DELTA % define the state derivatives x_dot = zeros(9,1); s1= sin(x(1)); c1= cos(x(1)); s2= sin(x(2)); c2= cos(x(2)); tan2= tan(x(2)); sec2= sec(x(2)); Tb2i_ang= [1, s1*tan2, c1*tan2 ; ... 0, c1, -s1 ; ... 0, s1*sec2, c1*sec2 ]; x_dot(1:3) = Tb2i_ang*x(7:9); % compute the cavitator forces and moments cav_FandM = cavitator_forces([x;u;rho]); Fcav_x = cav_FandM(1); % Check the fin forces fin_FandM = fin_forces([x;x_dot;u;rho]); Ffin_x = fin_FandM(1); % check planing forces plane_FandM = planing_forces([x;x_dot;rho]); Fplane_x = plane_FandM(1); % check mass moments and forces mass_FandM = mass_forces(x); Fmass_x = mass_FandM(1); % sum the forces to get the drag value drag = Fcav_x + Ffin_x + Fplane_x + Fmass_x;
134
eval_fintable.m function finCoef= eval_fintable(atk1,imm1,swp1,finTable) % Given the local angle of attack, immersion ration, and sweepback angle, % this function evaluates the six generalized % fin forces from the table of fin-force coefficients. % % Input: % atk1 - local angle of attack [deg] % imm1 - immersion as a fraction of fin span [] % swp1 - sweep back angle [deg] % FinTable - fin-force coefficient table % Output: % finCoef(1:6)= [CFx,CFy,CFz,CMx,CMy,CMz] % % Note: The table of fin force coefficients is based on the LSCAV local fin % coordinate system and the angle of attack in finTable is assumed to be in % degrees. % localize FinTable nFrc= finTable.nFrc; nSweep= finTable.nSweep; nImmersion= finTable.nImmersion; nAttack= finTable.nAttack; sweepAngle(1:nSweep)= finTable.sweepAngle(1:nSweep); immersionRatio(1:nImmersion)= finTable.immersionRatio(1:nImmersion); attackAngle(1:nAttack)= finTable.attackAngle(1:nAttack); % account for symmetry atk= abs(atk1); frcsymm= [1 1 1 1 1 1]; if (atk1 < 0) frcsymm= [1 1 -1 -1 -1 1]; end % check bounds on angle of attack, immersion, and sweepback angle atk= bind(atk,attackAngle(1),attackAngle(nAttack)); imm= bind(imm1,immersionRatio(1),immersionRatio(nImmersion)); swp= bind(swp1,sweepAngle(1),sweepAngle(nSweep)); % setup the linear interpolation for the given sweep and immersion [jSwp1,jSwp2,sSwp]= interp_nodes(swp,sweepAngle); [jImm1,jImm2,sImm]= interp_nodes(imm,immersionRatio); % set the table fit near the given angle of attack, sweep, and immersion Evaluate and interpolate at given angle of attack clear fit11 fit12 fit21 fit22; if (atk < finTable.attackBreak1) nP= 2; fit11(1:nP,1:6)= finTable.partialFit(1:nP,jImm1,jSwp1,1:6); fit12(1:nP,1:6)= finTable.partialFit(1:nP,jImm1,jSwp2,1:6); fit21(1:nP,1:6)= finTable.partialFit(1:nP,jImm2,jSwp1,1:6); fit22(1:nP,1:6)= finTable.partialFit(1:nP,jImm2,jSwp2,1:6); %elseif (atk < finTable.attackBreak2) % nP= 4; % fit11(1:nP,1:6)= finTable.transitFit(1:nP,jImm1,jSwp1,1:6); % fit12(1:nP,1:6)= finTable.transitFit(1:nP,jImm1,jSwp2,1:6);
135
% fit21(1:nP,1:6)= finTable.transitFit(1:nP,jImm2,jSwp1,1:6); % fit22(1:nP,1:6)= finTable.transitFit(1:nP,jImm2,jSwp2,1:6); else nP= 5; fit11(1:nP,1:6)= finTable.supercvFit(1:nP,jImm1,jSwp1,1:6); fit12(1:nP,1:6)= finTable.supercvFit(1:nP,jImm1,jSwp2,1:6); fit21(1:nP,1:6)= finTable.supercvFit(1:nP,jImm2,jSwp1,1:6); fit22(1:nP,1:6)= finTable.supercvFit(1:nP,jImm2,jSwp2,1:6); end % evaluate fit and interpolate if (sSwp == 0 & sImm == 0) for kFrc= 1:6 finCoef(kFrc)= frcsymm(kFrc)*polyval(fit11(1:nP,kFrc),atk); end elseif (sSwp == 0) for kFrc= 1:6 f11= polyval(fit11(1:nP,kFrc),atk); f21= polyval(fit21(1:nP,kFrc),atk); finCoef(kFrc)= frcsymm(kFrc)*((f21-f11)*sImm + f11); end elseif (sImm == 0) for kFrc= 1:6 f11= polyval(fit11(1:nP,kFrc),atk); f12= polyval(fit12(1:nP,kFrc),atk); finCoef(kFrc)= frcsymm(kFrc)*((f12-f11)*sSwp + f11); end else for kFrc= 1:6 f11= polyval(fit11(1:nP,kFrc),atk); f12= polyval(fit12(1:nP,kFrc),atk); f21= polyval(fit21(1:nP,kFrc),atk); f22= polyval(fit22(1:nP,kFrc),atk); f1= (f12-f11)*sSwp + f11; f2= (f22-f21)*sSwp + f21; finCoef(kFrc)= frcsymm(kFrc)*((f2-f1)*sImm + f1); end end return function x= bind(x,bound1,bound2) % place x within bounds so that bound1<=x<=bound2 if (x<bound1) x= bound1; elseif (x>bound2) x= bound2; end function [j1,j2,slope]= interp_nodes(x,v) % assume x bound within the possible values v, and v is monotonically increasing tol= 1.e-9; for j= 1:length(v) if (abs(x-v(j)) < tol) j1= j; j2= j; slope= 0; return
136
end if (x < v(j)) j1= j-1; j2= j; delv= v(j2)-v(j1); if (abs(delv) < tol) slope= 0; return else slope= (x-v(j1))/delv; return end end end return
137

immersion_depth.m function immDepth = immersion_depth(x,states,states_dot,pSec,body) % function used in fzero to calculate the point of body immersion [immDepth,immAngle] = body_immersion(states,states_dot,x,pSec,body); return
138
local_cav_dimensions.m function [yc,zc,rc] = local_cav_dimensions(x,x_dot,xc) global mass cav % compute the local cavity centerline and radius dimensions % define the states and state derivatives eul = x(1:3); %[phi,theta,psi] vel = x(4:6); %[u,v,w] omg = x(7:9); %[p,q,r] eul_dot = x_dot(1:3); %[phi_dot,theta_dot,psi_dot] vel_dot = x_dot(4:6); %[u_dot,v_dot,w_dot] omg_dot = x_dot(7:9); %[p_dot,q_dot,w_dot] % compute the maximum cavity dimensions [Rc,Lc] = max_cavity_dimensions(cav); % Compute the cavity centerline coordinates at a given x-location % Fr = norm(vel)/sqrt(mass.g*cav.D); bouyancy = 8.29; %Bouyancy (m/s^2) a_pitch = bouyancy + norm(vel)*eul_dot(2); a_yaw = norm(vel)*eul_dot(3); % compute centerline displacements due to turning and pitch accelerations % as well as bouyancy in the z-direction %yc = (1/Fr^2)*(a_turn/mass.g)*(xc/cav.D)^2; %zc = -(1/Fr^2)*(a_g/mass.g)*(xc/cav.D)^2 - 0.5*a_pitch*(xc/V)^2; yc = 0.5*a_yaw*(xc/norm(vel))^2; zc = -0.5*a_pitch*(xc/norm(vel))^2; X = norm([xc,yc,zc]); %X = xc; if X < Lc rc = Rc*(1-((2*X)/Lc-1)^2)^(1/2.4); %local cavity radius else rc = 0; end % return the local cavity coordinates return
139
make_comp_graphs.m % This function is designed to make state plots for two sets of data function [] = make_comp_graphs(t,x1,x2) % check for engineering zeros [row,col] = size(x1); tol = 1e-9; for i = 1:col if max(x1(:,i)) < tol x1(:,i) = zeros(row,1); end end [row,col] = size(x2); tol = 1e-9; for i = 1:col if max(x2(:,i)) < tol x2(:,i) = zeros(row,1); end end figure % phi subplot(3,3,1) plot(t,x1(:,1),'b-',t,x2(:,1),'r--') grid on ylabel('\phi (rad)') legend('Nonlinear','Linear') % theta subplot(3,3,4) plot(t,x1(:,2),'b-',t,x2(:,2),'r--') grid on ylabel('\theta (rad)') legend('Nonlinear','Linear') % psi subplot(3,3,7) plot(t,x1(:,3),'b-',t,x2(:,3),'r--') grid on ylabel('\psi (rad)') xlabel('Time (sec)') legend('Nonlinear','Linear') % u subplot(3,3,2) plot(t,x1(:,4),'b-',t,x2(:,4),'r--') grid on ylabel('u (m/s)') legend('Nonlinear','Linear') % v subplot(3,3,5) plot(t,x1(:,5),'b-',t,x2(:,5),'r--')
140
grid on ylabel('v (m/s)') legend('Nonlinear','Linear') % z subplot(3,3,8) plot(t,x1(:,6),'b-',t,x2(:,6),'r--') grid on ylabel('z (m/s)') xlabel('Time (sec)') legend('Nonlinear','Linear') % p subplot(3,3,3) plot(t,x1(:,7),'b-',t,x2(:,7),'r--') grid on ylabel('p (rad/sec)') legend('Nonlinear','Linear') % q subplot(3,3,6) plot(t,x1(:,8),'b-',t,x2(:,8),'r--') grid on ylabel('q (rad/sec)') legend('Nonlinear','Linear') % r subplot(3,3,9) plot(t,x1(:,9),'b-',t,x2(:,9),'r--') grid on ylabel('r (rad/sec)') xlabel('Time (sec)') legend('Nonlinear','Linear')
141
make_graphs.m % This function is designed to make state plots function [] = make_graphs(t,x) % check for engineering zeros [row,col] = size(x); tol = 1e-9; for i = 1:col if max(x(:,i)) < tol x(:,i) = zeros(row,1); end end figure % phi subplot(3,3,1) plot(t,x(:,1)) grid on ylabel('\phi (rad)') % theta subplot(3,3,4) plot(t,x(:,2)) grid on ylabel('\theta (rad)') % psi subplot(3,3,7) plot(t,x(:,3)) grid on ylabel('\psi (rad)') xlabel('Time (sec)') % u subplot(3,3,2) plot(t,x(:,4)) grid on ylabel('u (m/s)') % v subplot(3,3,5) plot(t,x(:,5)) grid on ylabel('v (m/s)') % z subplot(3,3,8) plot(t,x(:,6)) grid on ylabel('z (m/s)') xlabel('Time (sec)') % p subplot(3,3,3)
142
plot(t,x(:,7)) grid on ylabel('p (rad/sec)') % q subplot(3,3,6) plot(t,x(:,8)) grid on ylabel('q (rad/sec)') % r subplot(3,3,9) plot(t,x(:,9)) grid on ylabel('r (rad/sec)') xlabel('Time (sec)')
143
max_cavity_dimensions.m function [Rc,Lc] = max_cavity_dimensions(cav) global DELTA % This function computes the maximum cavity dimensions % % Since there is no model for the cavitation number and assuming that the % drag coefficient remains constant, the maximum cavity dimensions are not % only not a function of the states, but remain constant % add the DELTA values Cd0 = cav.Cd0 + cav.Cd0*DELTA.Cd0_range(DELTA.Cd0_rval); sigma = cav.sigma + cav.sigma*DELTA.sigma_range(DELTA.sigma_rval); % Compute the maximum cavity dimensions Cd = Cd0*(1+sigma+0.028*sigma^2); %Drag Coefficient Lc = cav.D*sqrt(Cd)*(1.24*sigma^(-1.123)-0.6); %Maximum cavity length Rc = cav.R*sqrt(1.35*Cd*sigma^(-0.93)); %Maximum cavity radius return
144
scav_least_squares3.m % Determine the coefficients a, b, and c ( z(i,j) = a*x(i)+b*y(j)+c ) function [coef,normed_error] = scav_least_squares3(x,y,z) N = length(x); M = length(y); % Fill the A and B matrics A = zeros(N*M,3); B = zeros(N*M,1); for i = 1:N for j = 1:M A(M*(i-1)+j,:) = [x(i),y(j),1]; B(M*(i-1)+j) = z(i,j); end end coef = inv([A'*A])*A'*B; normed_error = norm(A*coef-B)/norm(B); return scav_least_squares6.m % Determine the coefficients [p1,p2,p3,p4,5p,p6] % z(i,j) = p1*x^2 + p2*x*y + p3*y^2 + p4*x + p5*y + p6 function [coef,normed_error] = scav_least_squares6(x,y,z) N = length(x); M = length(y); % Fill the A and B matrics A = zeros(N*M,6); B = zeros(N*M,1); for i = 1:N for j = 1:M A(M*(i-1)+j,:) = [x(i)^2, x(i)*y(j), y(j)^2, x(i), y(j), 1]; B(M*(i-1)+j) = z(i,j); end end coef = inv([A'*A])*A'*B; normed_error = norm(A*coef-B)/norm(B); return scav_least_squares8.m % Determine the coefficients [p1,p2,p3,p4,p5,p6,97,p8] % z(i,j) = p1*x^3 + p2*y^3 + p3*x^2*y + p4*x*y^2 + p5*x*y + p6*x + p7*y + % p8 function [coef,normed_error] = scav_least_squares8(x,y,z) N = length(x); M = length(y); % Fill the A and B matrics
145
A = zeros(N*M,8); B = zeros(N*M,1); for i = 1:N for j = 1:M A(M*(i-1)+j,:) = [x(i)^3, y(j)^3, x(i)^2*y(j), x(i)*y(j)^2,... x(i)*y(j), x(i), y(j), 1]; B(M*(i-1)+j) = z(i,j); end end coef = inv([A'*A])*A'*B; normed_error = norm(A*coef-B)/norm(B); return
146
test_ol_sensitivity.m % This function is designed to test the open sensitivity to variations in % system parameters as is defined in setup_sim_data. It does this by % comparing the A and B matrices as well as comparing stability % set the global variables global planeModel mass inertia body cav cavity DELTA global sim hwait % set constants and model data [mass, inertia, body, cav, cavity, rho] = setup_sim_data; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Setup simulation parameters %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% sim.dt = 0.001; %sec sim.t_stop = 2; %sec sim.simulating = false; % set the nominal speed V = 82.25; % set the turning acceleration turnG = 0; % set the flight condition: % 'straight-and-level' % 'turn' flight_con = 'straight-and-level'; %flight_con = 'turn'; % set the initial heading initial_heading = 0; % set the output reference frame and appropriate transformation matrix mass.origin_method = 'U of MN'; %('U of MN','Anteon') switch mass.origin_method case 'U of MN' dist = [0;0;0]; case 'Anteon' dist = [mass.x_cg;0;0]'; otherwise error('Incorrect origin setting') end r_tilde = [0,-dist(3),dist(2); dist(3),0,-dist(1); -dist(2),dist(1),0]; R = [eye(3),r_tilde; zeros(3),eye(3)]; % define value for uncertainty ranges minVal = 1; nomVal = 2; maxVal = 3;
147
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Define Initial/Trim Conditions %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % set the planing model (no planing is desired) planeModel = 'Hassan'; % set the appropraite trim conditions switch flight_con case 'straight-and-level' x0 = [0,0,initial_heading,V,0,0,0,0,0]'; thrust = -1*compute_drag(x0,zeros(6,1),rho); u0 = [0,0,0,0,0,0,thrust,0,0]'; [x0,u0,y0,dx,options] = trim('trim_6DOF_model',x0,u0,[],... [1,2,3,4,5,6,7,8,9],[2,4,6,8,9]); case 'turn' x0 = [0,0,initial_heading,V,0,0,0,0,(turnG*9.81)/V]'; x_dot = zeros(9,1); s1= sin(x0(1)); c1= cos(x0(1)); s2= sin(x0(2)); c2= cos(x0(2)); tan2= tan(x0(2)); sec2= sec(x0(2)); Tb2i_ang= [1, s1*tan2, c1*tan2 ; ... 0, c1, -s1 ; ... 0, s1*sec2, c1*sec2 ]; x_dot(1:3) = Tb2i_ang*x0(7:9); x_dot(1) = 0; thrust = -1*compute_drag(x0,zeros(6,1),rho); u0 = [0,0,0,0,0,0,thrust,0,0]'; [x0,u0,y0,dx,options] = trim('trim_6DOF_model',x0,u0,[],... [9],[8,9],[],x_dot,[1,2,3,4,5,6,7,8,9]); otherwise disp('Incorrect flight condition setting') return end % check for engineering zeros in x0 and u0 tol = 1e-9; for i = 1:length(x0) if abs(x0(i)) < tol x0(i) = 0; end end for i = 1:length(u0) if abs(u0(i)) < tol u0(i) = 0; end end % display the trim conditions disp(' ') disp('The trim conditions are as follows:') disp(' x0 u0 y0 dx0') disp([x0,u0,y0,dx]) % set the initial conditions thrust = u0(7:9); u0 = u0(1:6);
148

x0 = x0; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Compute the Nominal Linearized Model %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% input_step_matrix = zeros(6,6); state_step_matrix = zeros(9,9); planeModel = 'Hassan'; [A_nom,B_nom,C_nom,D_nom] = linmod('ol_model'); nom_sys = ss(A_nom,B_nom,C_nom,D_nom); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Check the sensitivity to the fin force and moment coefficients %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% for coef = 1:6 DELTA.Cfin_coef = coef; % compute the linear system with the min parameter DELTA.Cfin_rval = minVal; [A_min,B_min,C_min,D_min] = linmod('ol_model'); min_sys = ss(A_min,B_min,C_min,D_min); % compute the linear system with the max parameter DELTA.Cfin_rval = maxVal; [A_max,B_max,C_max,D_max] = linmod('ol_model'); max_sys = ss(A_max,B_max,C_max,D_max); % reset to the nominal value DELTA.Cfin_rval = nomVal; % make the varying system pole-zero map figure pzmap(nom_sys,'k',min_sys,'r',max_sys,'b') grid on legend('Nominal','Minimum','Maximum') title(['Open-Loop Pole-Zero Map for Fin Coefficient Index ',num2str(coef)]) end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Check the sensitivity to the cavitator Cd0 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % compute the linear system with the min parameter DELTA.Cd0_rval = minVal; [A_min,B_min,C_min,D_min] = linmod('ol_model'); min_sys = ss(A_min,B_min,C_min,D_min); % compute the linear system with the max parameter DELTA.Cd0_rval = maxVal; [A_max,B_max,C_max,D_max] = linmod('ol_model');
149
max_sys = ss(A_max,B_max,C_max,D_max); % reset to the nominal value DELTA.Cd0_rval = nomVal; % make the varying system pole-zero map figure pzmap(nom_sys,'k',min_sys,'r',max_sys,'b') grid on legend('Nominal','Minimum','Maximum') title('Open-Loop Pole-Zero Map for Cd_0') %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Check the sensitivity to the cavitator number %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % compute the linear system with the min parameter DELTA.sigma_rval = minVal; [A_min,B_min,C_min,D_min] = linmod('ol_model'); min_sys = ss(A_min,B_min,C_min,D_min); % compute the linear system with the max parameter DELTA.sigma_rval = maxVal; [A_max,B_max,C_max,D_max] = linmod('ol_model'); max_sys = ss(A_max,B_max,C_max,D_max); % reset to the nominal value DELTA.sigma_rval = nomVal; % make the varying system pole-zero map figure pzmap(nom_sys,'k',min_sys,'r',max_sys,'b') grid on legend('Nominal','Minimum','Maximum') title('Open-Loop Pole-Zero Map for \sigma parameter')
150
test_turnG.m function [maxG] = test_turnG(Vrange) % The purpose of this function is to test the min and max allowable turnG % before planing forces occur. Keep in mind that planing forces are not % desirable and that the limit of the trajectory profile is based on the % occurance of these planing forces % set constants and model data [mass, inertia, body, cav, cavity, rho] = setup_sim_data; sim.dt = 0.001; %sec sim.t_stop = 0.5; %sec sim.simulating = false; initial_heading = 0; delG = 0.1; pSec = 3; % check max turnG for range of velocities maxG = zeros(1,length(Vrange)); for vel_index = 1:length(Vrange) % stop when planing occurs hTransom = -100; count = 0; turnG = 0; while (hTransom < 0) & (count < 100) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Setup simulation parameters %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % set the nominal speed V = Vrange(vel_index); % set the flight condition: % 'straight-and-level' % 'turn' %flight_con = 'straight-and-level'; flight_con = 'turn'; % set the output reference frame and appropriate transformation matrix mass.origin_method = 'U of MN'; %('U of MN','Anteon') switch mass.origin_method case 'U of MN' dist = [0;0;0]; case 'Anteon' dist = [mass.x_cg;0;0]'; otherwise error('Incorrect origin setting') end r_tilde = [0,-dist(3),dist(2); dist(3),0,-dist(1); -dist(2),dist(1),0]; R = [eye(3),r_tilde; zeros(3),eye(3)];
151
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Define Initial/Trim Conditions %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % set the planing model (no planing is desired) planeModel = 'Hassan'; % set the appropraite trim conditions x_dot = zeros(9,1); switch flight_con case 'straight-and-level' x0 = [0,0,initial_heading,V,0,0,0,0,0]'; thrust = -1*compute_drag(x0,zeros(6,1),rho); u0 = [0,0,0,0,0,0,thrust,0,0]'; [x0,u0,y0,dx,options] = trim('trim_6DOF_model',x0,u0,[],... [1,2,3,4,5,6,7,8,9],[2,4,6,8,9]); case 'turn' x0 = [0,0,initial_heading,V,0,0,0,0,(turnG*9.81)/V]'; x_dot = zeros(9,1); s1= sin(x0(1)); c1= cos(x0(1)); s2= sin(x0(2)); c2= cos(x0(2)); tan2= tan(x0(2)); sec2= sec(x0(2)); Tb2i_ang= [1, s1*tan2, c1*tan2 ; ... 0, c1, -s1 ; ... 0, s1*sec2, c1*sec2 ]; x_dot(1:3) = Tb2i_ang*x0(7:9); x_dot(1) = 0; thrust = -1*compute_drag(x0,zeros(6,1),rho); u0 = [0,0,0,0,0,0,thrust,0,0]'; [x0,u0,y0,dx,options] = trim('trim_6DOF_model',x0,u0,[],... [9],[8,9],[],x_dot,[1,2,3,4,5,6,7,8,9]); otherwise disp('Incorrect flight condition setting') return end % check for engineering zeros in x0 and u0 tol = 1e-9; for i = 1:length(x0) if abs(x0(i)) < tol x0(i) = 0; end end for i = 1:length(u0) if abs(u0(i)) < tol u0(i) = 0; end end % set the initial conditions thrust = u0(7:9); u = u0(1:6); x = x0; % define transom position and determine immersion there xTransom = body.x2(pSec); planeLength = 0;
152

[hTransom,aTransom] = body_immersion(x,x_dot,xTransom,pSec,body); % store max turnG value if hTransom > 0 maxG(vel_index) = turnG else turnG = turnG + delG; end count = count + 1 end %while end %for
153
Appendix C This appendix shows how the system dynamics vary with velocity.
154
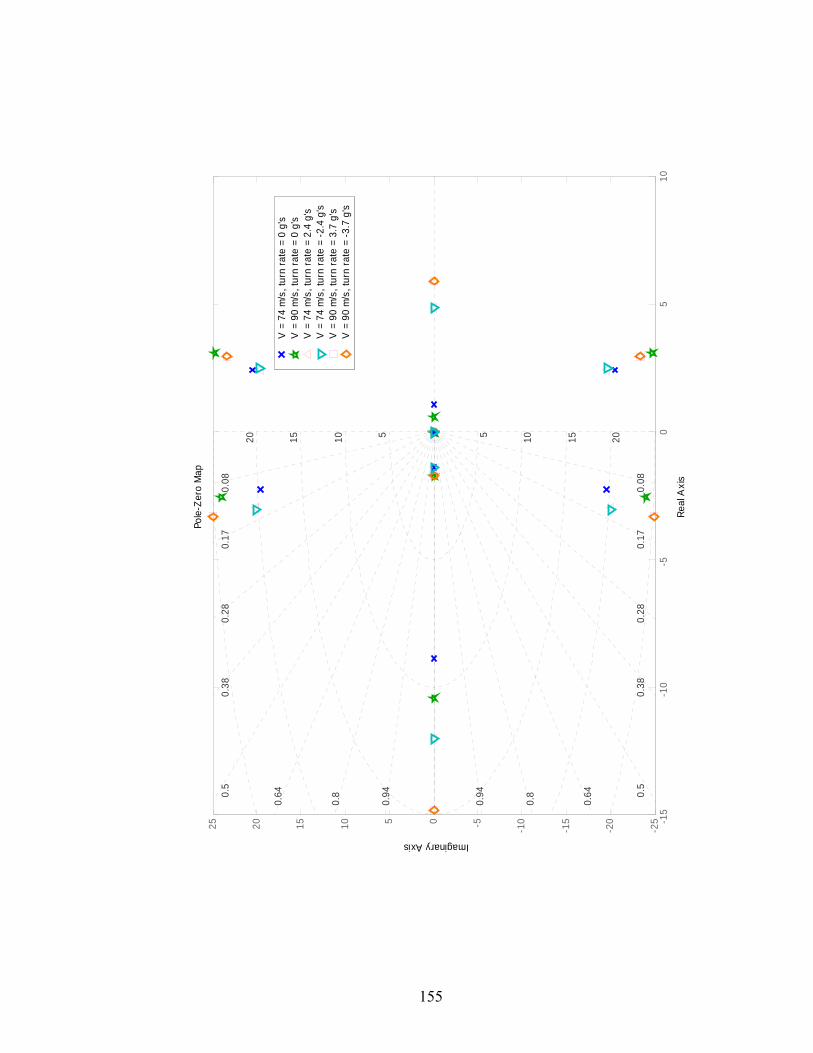
10
155
-15
-10
-50
5-2
5
-20
-15
-10-50510152025
0.38
0.28
0.17
0.08
0.94
0.8
0.640.
5
0.38
0.17
0.08
15
0.28
0.5
5 20
0.64
20 1015 105
0.8
0.94
V =
74
m/s
, tur
n ra
te =
0 g
'sV
= 9
0 m
/s, t
urn
rate
= 0
g's
V =
74
m/s
, tur
n ra
te =
2.4
g's
V =
74
m/s
, tur
n ra
te =
-2.4
g's
V =
90
m/s
, tur
n ra
te =
3.7
g's
V =
90
m/s
, tur
n ra
te =
-3.7
g's
Pole
-Zer
o M
ap
Real
Axi
s
Imaginary Axis

11 Appendix D This appendix displays pole-zero maps of the open-loop system for varying parameters. Given the range of the varying parameters, how the system dynamics change can be read from the graphs. The parameters shown here are the cavitation number, the cavitator drag coefficient and zero a.o.a., and the six fin force and moment coefficients.
156
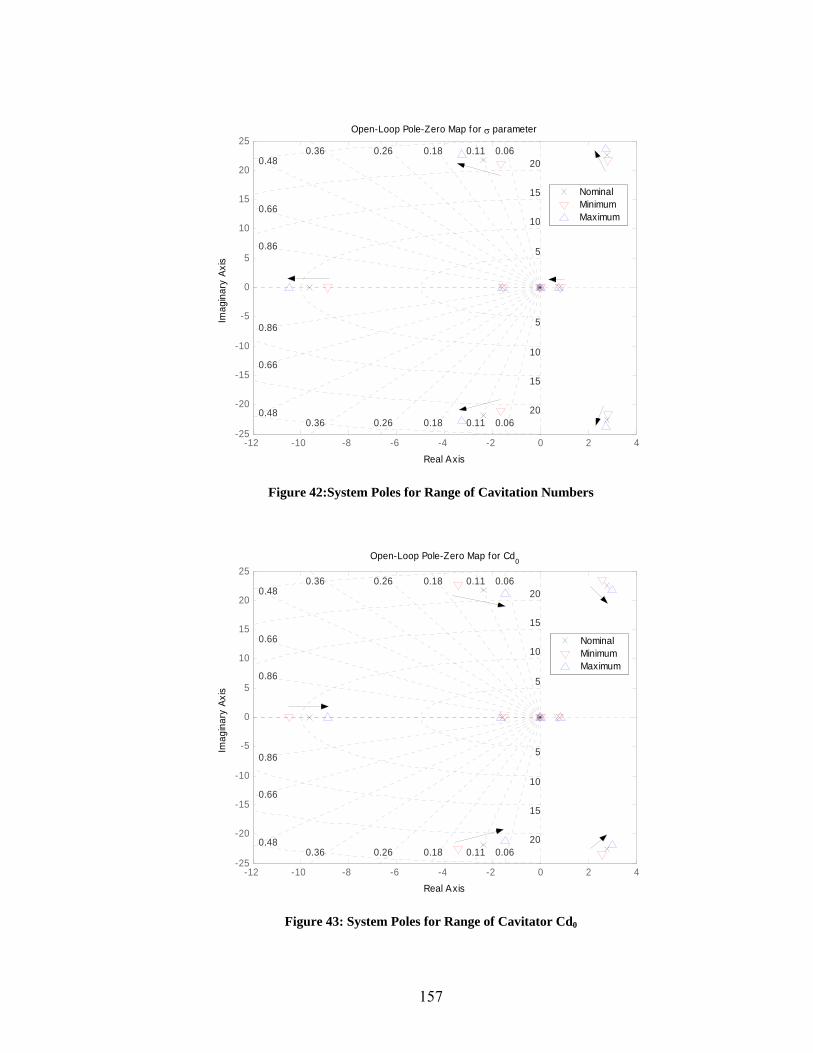
-12 -10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.66
0.480.36 0.26 0.18 0.11 0.06
0.36 0.26 0.18 0.11 0.06
0.86 5
0.66
0.48
15
20
0.86
15
10
10
20
5
NominalMinimumMaximum
Open-Loop Pole-Zero Map for σ parameter
Real Axis
Imag
inar
y Ax
is
Figure 42:System Poles for Range of Cavitation Numbers
-12 -10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.66
0.480.36 0.26 0.18 0.11 0.06
0.36 0.26 0.18 0.11 0.06
0.86 5
0.66
0.48
15
20
0.86
15
10
10
20
5
NominalMinimumMaximum
Open-Loop Pole-Zero Map for Cd0
Real Axis
Imag
inar
y Ax
is
Figure 43: System Poles for Range of Cavitator Cd0
157
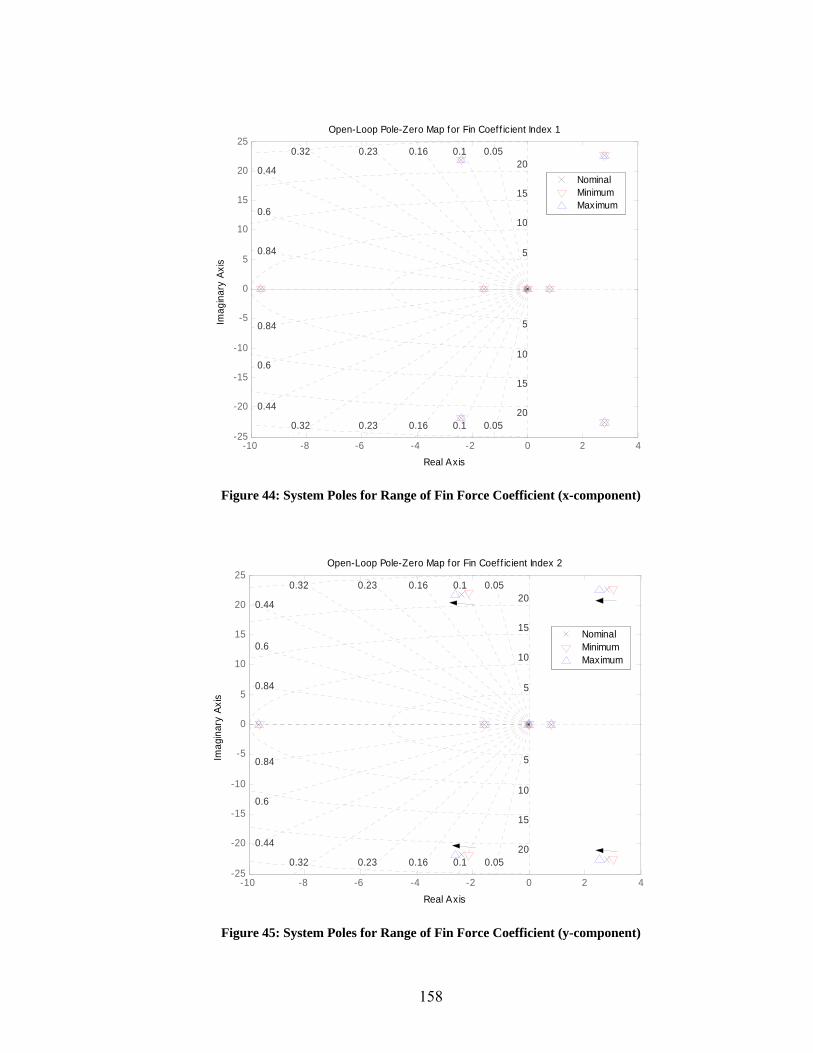
-10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.6
0.44
0.32 0.23 0.16 0.1 0.05
0.32 0.23 0.16 0.1 0.05
0.84 5
0.6
0.44
15
20
0.84
15
10
10
20
5
NominalMinimumMaximum
Open-Loop Pole-Zero Map for Fin Coef f icient Index 1
Real Axis
Imag
inar
y Ax
is
Figure 44: System Poles for Range of Fin Force Coefficient (x-component)
-10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.6
0.44
0.32 0.23 0.16 0.1 0.05
0.32 0.23 0.16 0.1 0.05
0.84 5
0.6
0.44
15
20
0.84
15
10
10
20
5
NominalMinimumMaximum
Open-Loop Pole-Zero Map for Fin Coef f icient Index 2
Real Axis
Imag
inar
y Ax
is
Figure 45: System Poles for Range of Fin Force Coefficient (y-component)
158
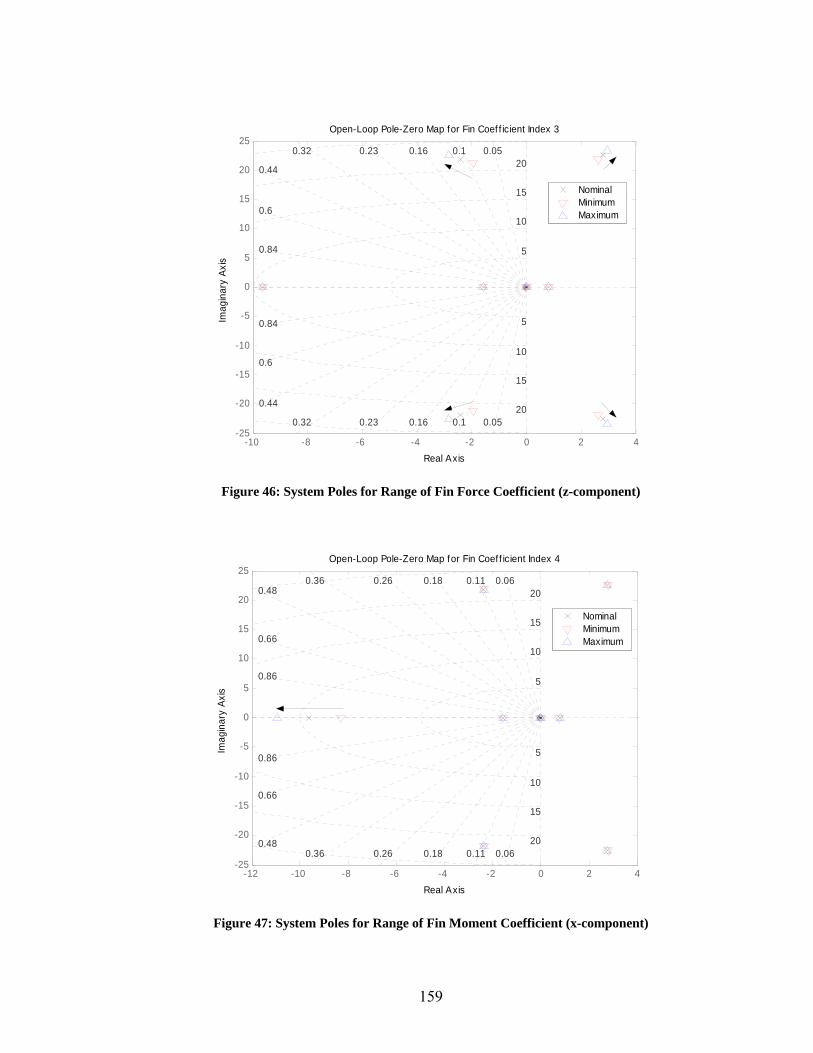
-10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.6
0.44
0.32 0.23 0.16 0.1 0.05
0.32 0.23 0.16 0.1 0.05
0.84 5
0.6
0.44
15
20
0.84
15
10
10
20
5
NominalMinimumMaximum
Open-Loop Pole-Zero Map for Fin Coef f icient Index 3
Real Axis
Imag
inar
y Ax
is
Figure 46: System Poles for Range of Fin Force Coefficient (z-component)
-12 -10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.66
0.480.36 0.26 0.18 0.11 0.06
0.36 0.26 0.18 0.11 0.06
0.86 5
0.66
0.48
15
20
0.86
15
10
10
20
5
NominalMinimumMaximum
Open-Loop Pole-Zero Map for Fin Coef f icient Index 4
Real Axis
Imag
inar
y Ax
is
Figure 47: System Poles for Range of Fin Moment Coefficient (x-component)
159
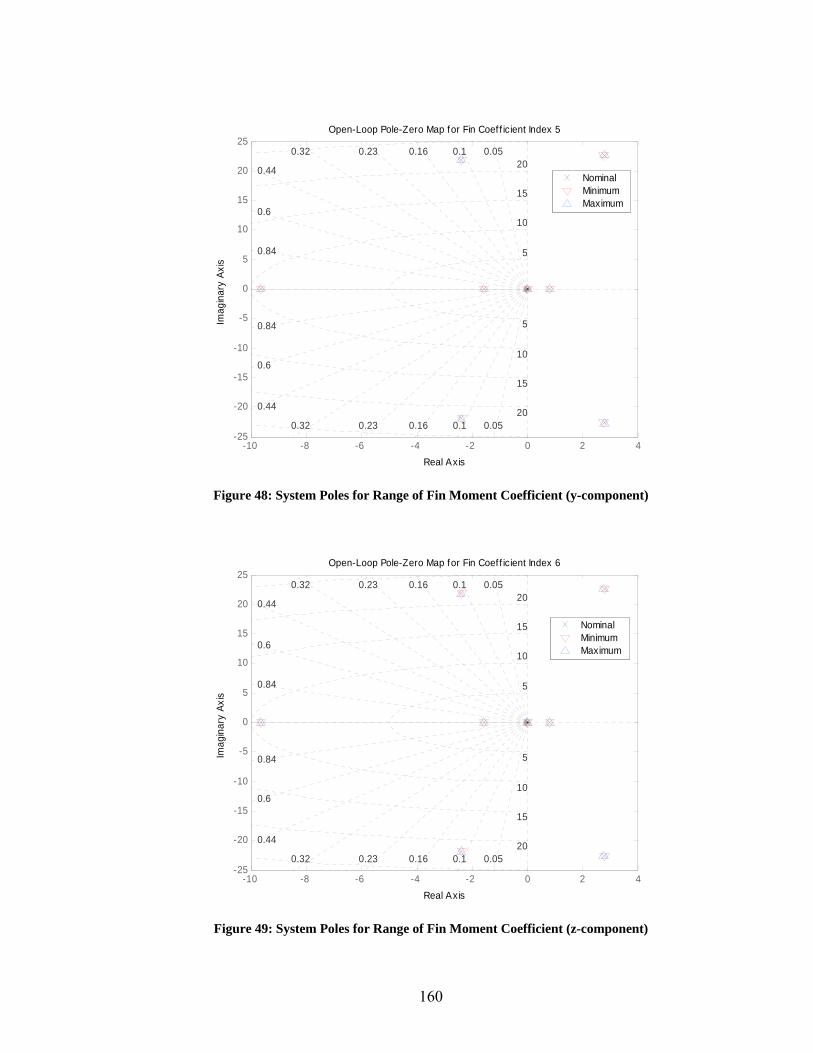
-10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.6
0.44
0.32 0.23 0.16 0.1 0.05
0.32 0.23 0.16 0.1 0.05
0.84 5
0.6
0.44
15
20
0.84
15
10
10
20
5
NominalMinimumMaximum
Open-Loop Pole-Zero Map for Fin Coef f icient Index 5
Real Axis
Imag
inar
y Ax
is
Figure 48: System Poles for Range of Fin Moment Coefficient (y-component)
-10 -8 -6 -4 -2 0 2 4-25
-20
-15
-10
-5
0
5
10
15
20
25
0.6
0.44
0.32 0.23 0.16 0.1 0.05
0.32 0.23 0.16 0.1 0.05
0.84 5
0.6
0.44
15
20
0.84
15
10
10
20
5
NominalMinimumMaximum
Open-Loop Pole-Zero Map for Fin Coef f icient Index 6
Real Axis
Imag
inar
y Ax
is
Figure 49: System Poles for Range of Fin Moment Coefficient (z-component)
160