general-purpose payload- oriented software architecture...
TRANSCRIPT

General-purpose Payload-oriented Software Architecture
for Nano-SatellitesCarles Araguz
Elisenda Bou-BalustEduard Alarcón
2015 Flight Software Workshop, Johns Hopkins University Applied Physics Laboratory

Introduction
General-purpose Payload-oriented Software Architecture for Nano-Satellites 2015 Flight Software Workshop 2
→ Nano-satellites have become an affordable alternative for companies, research organizations and universities to access the space market. Either as consumers or as providers. Low-cost, short development times. Proven to be suitable platforms for:
• technology demonstration (Bowmeester 2010);• a variety of EO and remote sensing purposes (Selva 2012);• space research (e.g. GeneSat-1);• and many other space applications (e.g. low-power communications, maritime activity
surveillance).
PlanetLabs Flock-1 unit NASA’s O/OREOSTyvak Intrepid platform
Oct. 27th, 2015
© PlanetLabs, www.planet.com © Tyvak Inc., www.tyvak.com www.nasa.gov/mission_pages/smallsats/ooreos

Nano-satellite programs: current context
→ Many nano-satellite missions are developed under educational programs. Generally less demanding in terms of accuracy and reliability. A clear sign of the on-going democratization of space. Continuous exploration of science return capabilities → complexity growth.
General-purpose Payload-oriented Software Architecture for Nano-Satellites 2015 Flight Software Workshop 3Oct. 27th, 2015
→ Nano-satellites are envisioned to be favorable for the development of new mission architectures (Banhart 2007): Fractionated spacecraft. Satellite constellations (e.g. PlanetLabs Flock). Federated Satellite Systems.
Image credit: © TU Delft

Nano-satellite hardware-software development
→ Integration of hardware modules/subsystems. Compliant with the CubeSat standard.
→ Developers ultimately need to write their custom software to control the spacecraft at device- and system-level.
→ Less attention has been placed on software-related issues during the consolidation of the CubeSat era. Software is the final architectural element to achieve a desired functionality. Software characteristics are critical for the mission → its correctness affects the
functionality of the spacecraft.
→ Designing proper software architectures: Essential to achieve system-wide quality attributes (e.g. reliability, performance…) Should not be understood as the mere fact of writing functionally correct programs.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 4
Presentation outline
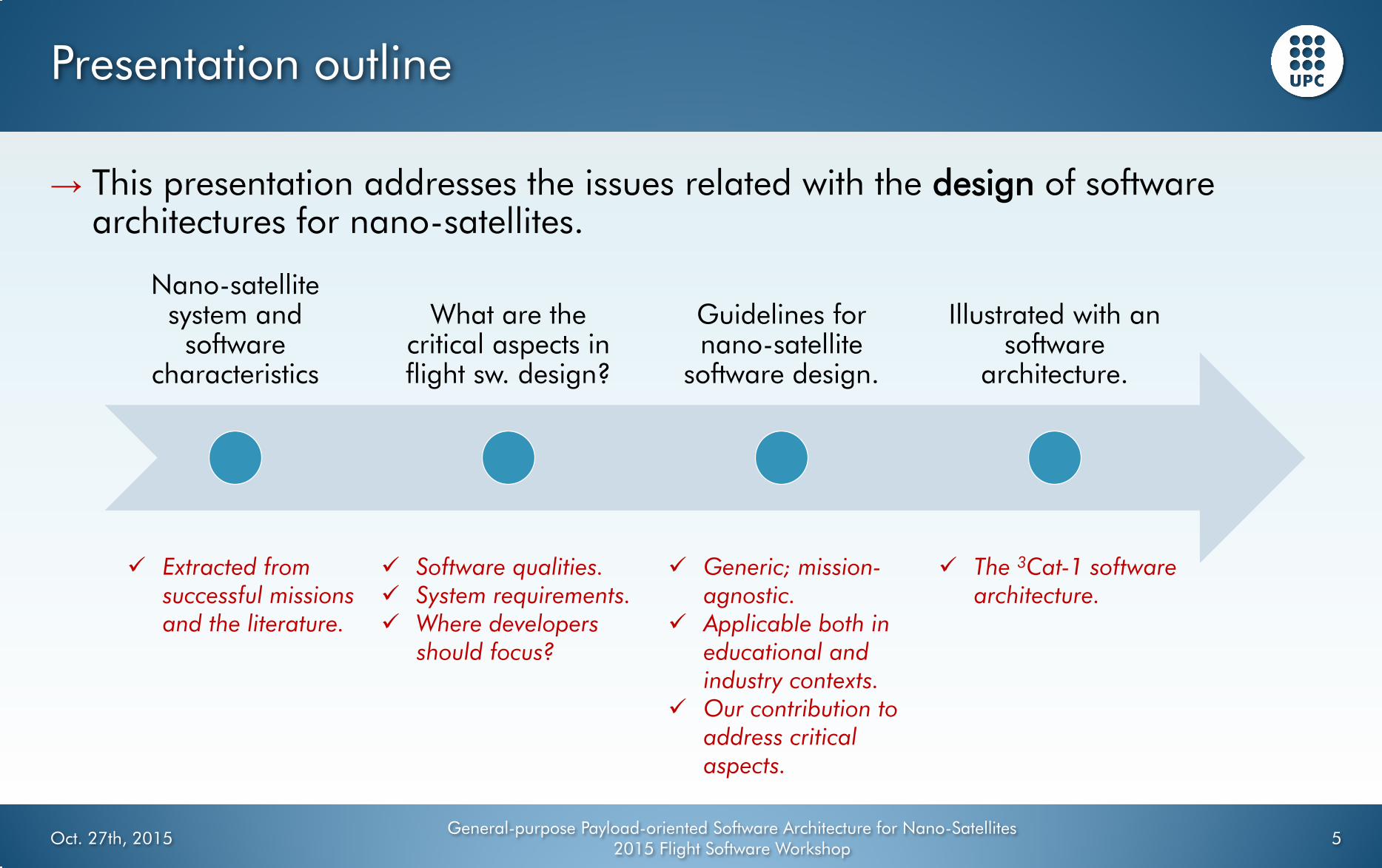
→ This presentation addresses the issues related with the design of software architectures for nano-satellites.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 5
Software qualities. System requirements. Where developers
should focus?
Extracted from successful missions and the literature.
Generic; mission-agnostic.
Applicable both in educational and industry contexts.
Our contribution to address critical aspects.
The 3Cat-1 software architecture.
Nano-satellite system and
software characteristics
What are the critical aspects in flight sw. design?
Guidelines for nano-satellite
software design.
Illustrated with an software
architecture.

Presentation outline
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 6
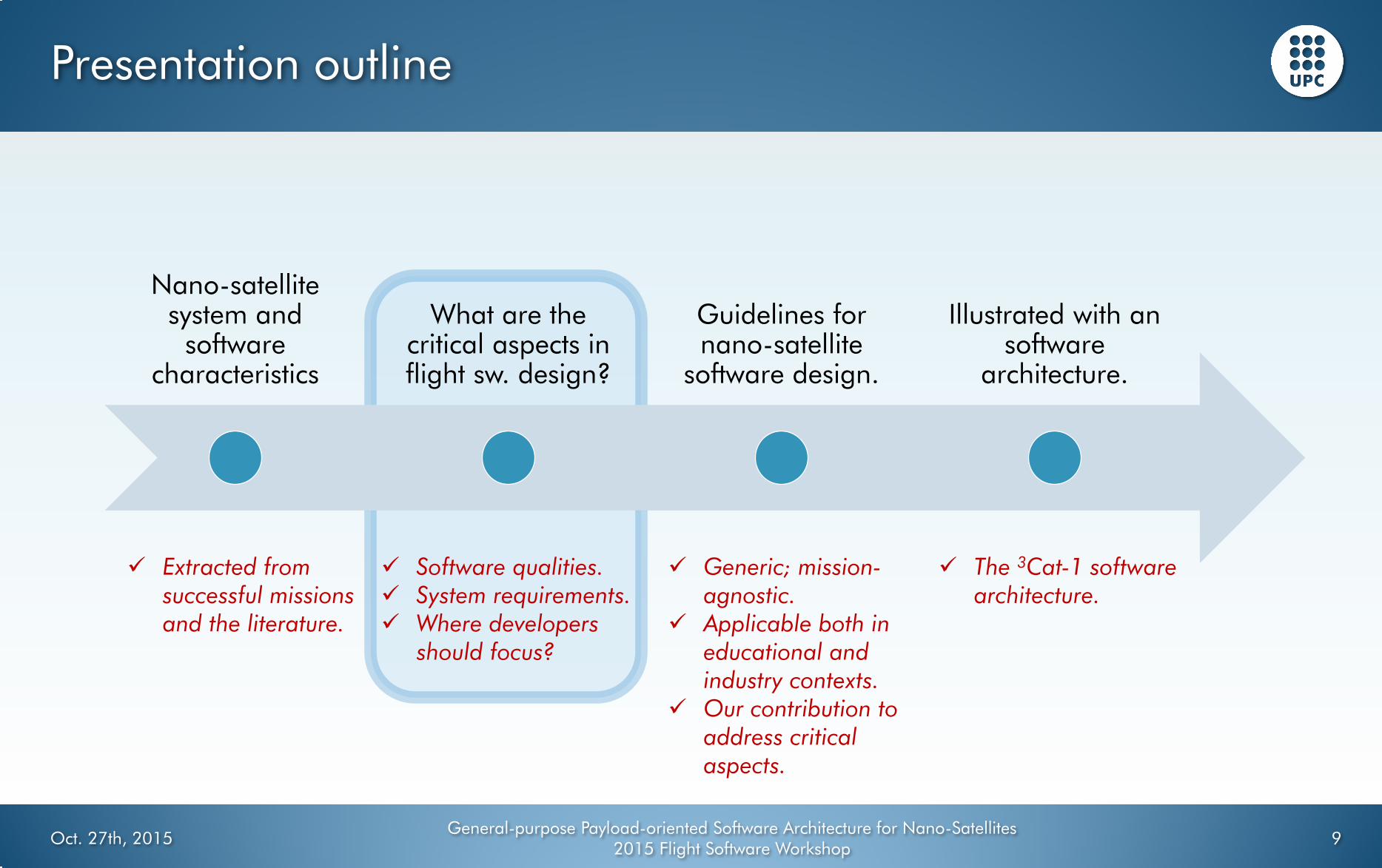
Nano-satellite system and
software characteristics
What are the critical aspects in flight sw. design?
Guidelines for nano-satellite
software design.
Illustrated with an software
architecture.
Software qualities. System requirements. Where developers
should focus?
Extracted from successful missions and the literature.
Generic; mission-agnostic.
Applicable both in educational and industry contexts.
Our contribution to address critical aspects.
The 3Cat-1 software architecture.

Nano-satellite system characteristics
→ Reusable platforms: The same platform is used for several generations within the same nano-satellite program. Low-cost. Fast development cycles.
→ COTS components: Non-rad-hard technology.
→ No hardware redundancy.→ Limited power availability.→ On-board computers with very low computational resources: Single-Board Computer modules (SBC) for embedded applications. ARM CPU, 40~500 MHz. ~256 MB of RAM or less (e.g. GOMSpace’s NanoMind: 4 MB).
→ Constrained communication links.→ Usually LEO orbits.→ Ground-operated: time-tagged commands are uplinked and executed sequentially.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 7
© GOMSPace – Nanomind© Gumstix – Overo© Taskit – StampAD5

Nano-satellite software characteristics
→ Many approaches to improve system reliability: Process isolation and protected memory areas. Real-Time Operating Systems: small footprint, soft-real-time Linux kernels. FDIR methodology: ESA’s OPS-SAT CubeSat, TU Delft’s DelFFi (Bräuer 2015). Software redundancy: triplicate critical data. Robust communications: prevent unreliable delivery of digital data. Hardware and software-watchdogs. …
→ Some approaches towards modularity and updateability.: Dynamically-linked libraries: encapsulate re-usable components.
→ Architectural diversity: Centralized: e.g. CalPoly’s 2nd Gen. Bus (Manyak, 2011). Decentralized/distributed: e.g. AAUSAT3 software (Bønding 2008).
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 8
Presentation outline
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 9
Software qualities. System requirements. Where developers
should focus?
Extracted from successful missions and the literature.
Generic; mission-agnostic.
Applicable both in educational and industry contexts.
Our contribution to address critical aspects.
The 3Cat-1 software architecture.
Nano-satellite system and
software characteristics
What are the critical aspects in flight sw. design?
Guidelines for nano-satellite
software design.
Illustrated with an software
architecture.

Requirements for next-generation nano-satellite software
→ Where should software engineers focus?1. Robustness → software quality.2. Software modularity and scalability → software quality.3. Autonomy → functionality.
→ Fundamental for nowadays’ nano-satellite software.→ ROBUSTNESS:
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 10
Large spacecraft: Rad-hard components to help mitigate
SEU and SEL. Sophisticated real-time kernels,
hypervisors and middleware with flight heritage (e.g. cFS/cFE.)
Nano-satellites:• SEU and SEL are critical (use of COTS
and tightly constrained power budgets).• Some can be adopted, although they are
usually unknown (especially in university programs). Engineers tend to use other alternatives (e.g. FreeRTOS, std. Linux…)
• Designing robustness is critical (at an architectural level too.)

Requirements for next-generation nano-satellite software
→ The capabilities of satellite constellations consisting of many (identical or heterogeneous) nano-satellites are promising.
→ Unceasing technology miniaturization is allowing new, smaller, less power demanding and more capable devices and modules potentially increasing the payload capacity of nano-satellites.
→ Due to their low cost, nano-satellite platforms are usually reused. New generations of nano-satellites have the same basic subsystems but host different payloads.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 11
Flexible architectures: easy to update/port when the underlying hardware changes.
Scalable and modular in terms of payload functionality (i.e. payload management capabilities)
Easy to maintain and fix.
MODULARITY AND SCALABILITY:

Requirements for next-generation nano-satellite software
→ AUTONOMY:
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 12
→ Limited observability: Constrained communication links:
• Usually in the UHF band. • Limited telemetry data rates/volume.• Downloading fine-grained state history is unfeasible.
LEO orbits: ~5-8 passes per day; ~10 minutes each. Need to be able to autonomously recover from errors
and re-plan its activities.
→ On-board data analysis improves science return (e.g. NASA’s EO-1: CASPER) Higher computational capabilities are required. In nano-satellites, e.g. IPEX (CASPER).
→ New mission architectures demand unit-autonomy: Nodes need to proactively cooperate (communicate,
exchange resources) to achieve global common goals.
image credit: mathworks.com
image credit: jpl.nasa.gov/cubesat/ipex.php
Presentation outline
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 13
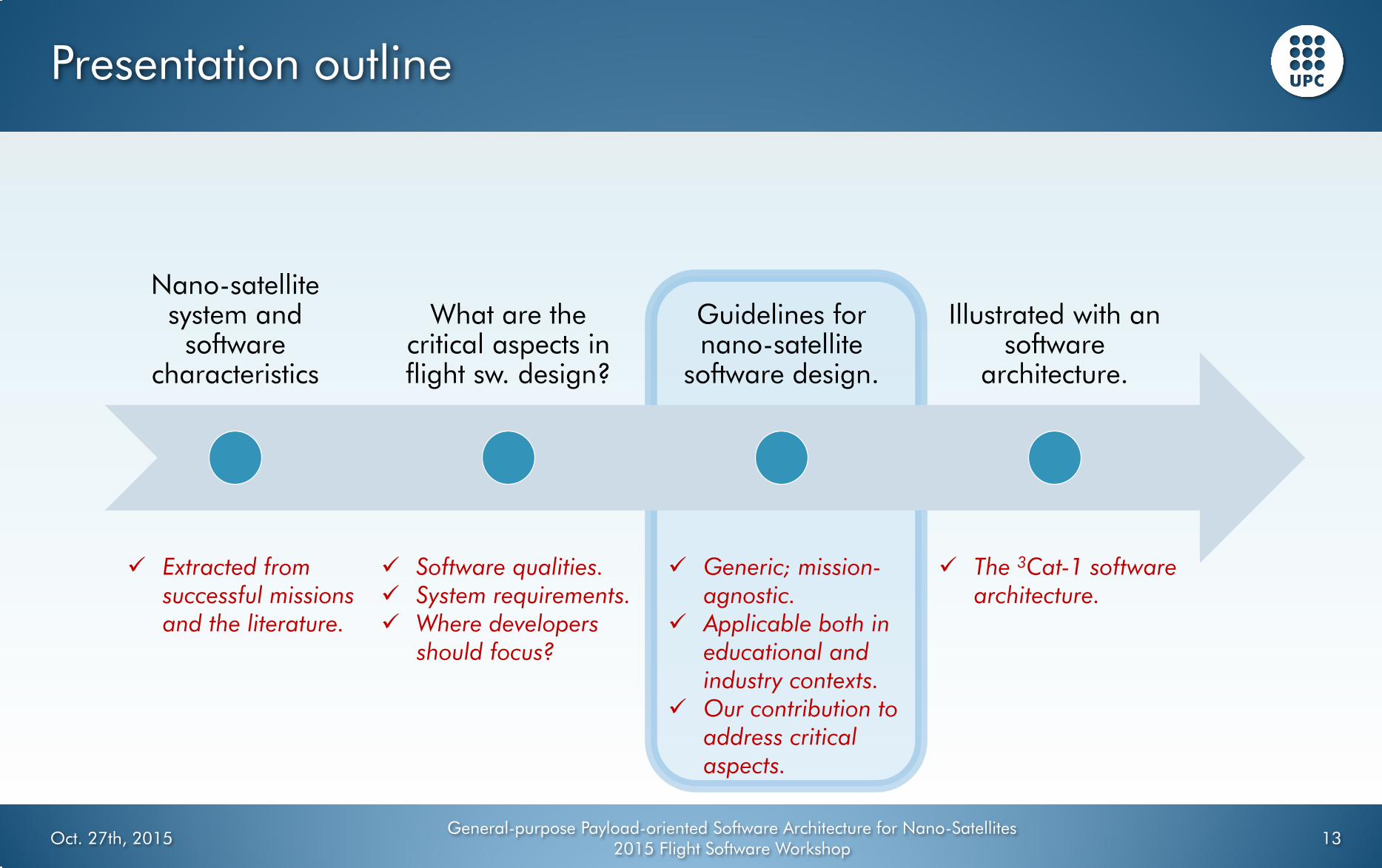
Software qualities. System requirements. Where developers
should focus?
Extracted from successful missions and the literature.
Generic; mission-agnostic.
Applicable both in educational and industry contexts.
Our contribution to address critical aspects.
The 3Cat-1 software architecture.
Nano-satellite system and
software characteristics
What are the critical aspects in flight sw. design?
Guidelines for nano-satellite
software design.
Illustrated with an software
architecture.
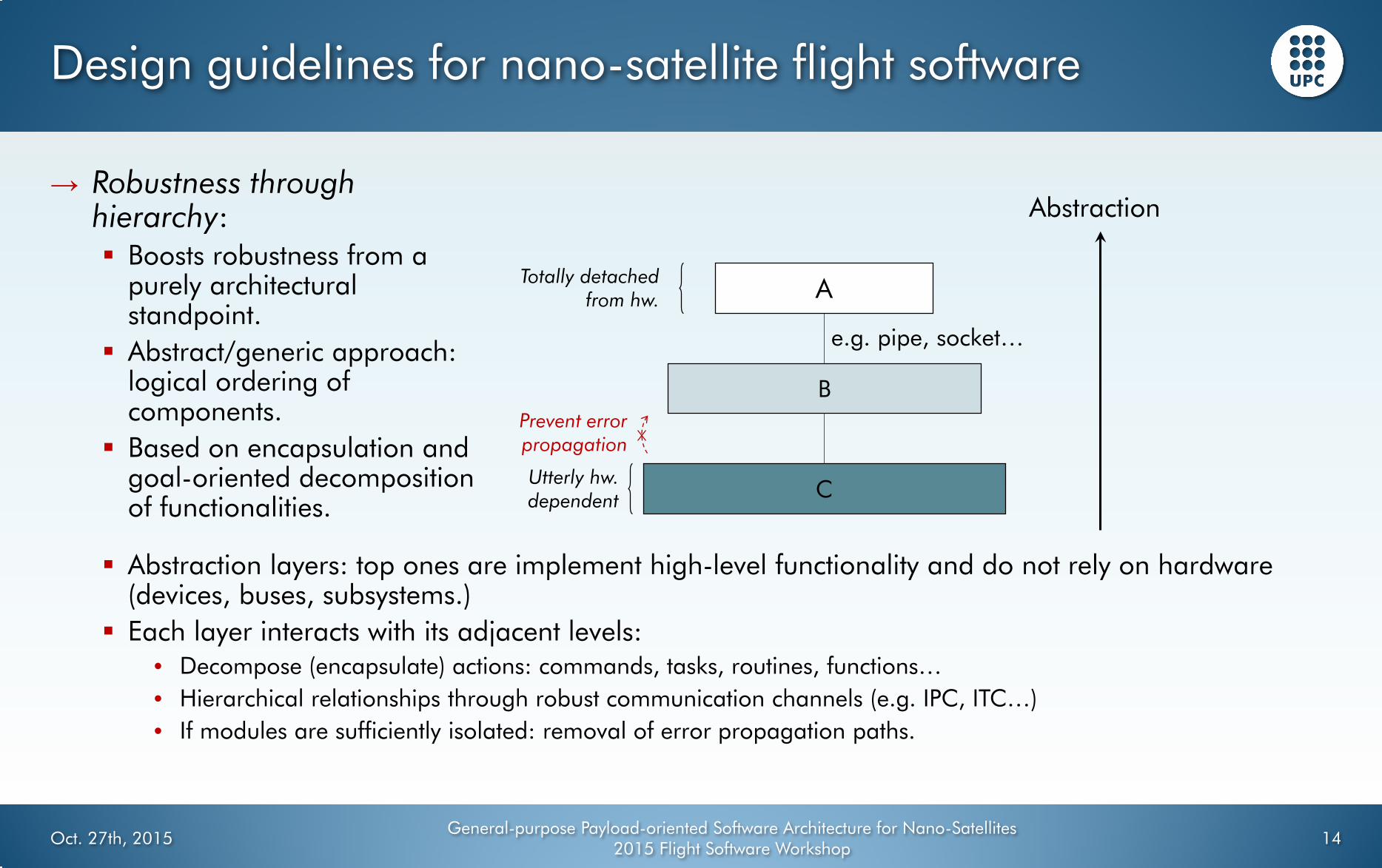
Design guidelines for nano-satellite flight software
→ Robustness through hierarchy: Boosts robustness from a
purely architectural standpoint.
Abstract/generic approach: logical ordering of components.
Based on encapsulation and goal-oriented decomposition of functionalities.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 14
B
C
Totally detached from hw.
Utterly hw. dependent
A
Abstraction
Prevent error propagation
Abstraction layers: top ones are implement high-level functionality and do not rely on hardware (devices, buses, subsystems.)
Each layer interacts with its adjacent levels:• Decompose (encapsulate) actions: commands, tasks, routines, functions…• Hierarchical relationships through robust communication channels (e.g. IPC, ITC…)• If modules are sufficiently isolated: removal of error propagation paths.
e.g. pipe, socket…

Design guidelines for nano-satellite flight software
→ Robustness through hierarchy: Horizontal fragmentation
based on functionality. Functionalities are
disseminated across levels of abstraction.
• Minimizes complexity of each component.
• From high-level (very abstract) goals to low-level (close to hardware) goals.
• High-level (critical) are detached from hardware sources of error. E.g.:
o Subsystem’s power failure.o File system failure.o Payload failure.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 15
b1 b2
c1 c3c2 c4 c6c5
b3
a1Totally detached
from hw.
Utterly hw. dependent
b4
functionalities are much more intertwined
Start high-level tasks, set mission constraints, trigger system states, validate sensor data with models.
Manage active processes/threads, expand states, decrypt telemetry commands, manage subsystems.
Send commands to devices, enable power regulators, log scientific data.
Abstraction
f1 (e.g. energy management)f2 (e.g. attitude control)f3 (e.g. communications)f4 (e.g. payload management)f5 (e.g. data processing and storage)Fu
nctio
nalit
y
Prevent error propagation
Illustrative goals

Design guidelines for nano-satellite flight software
→ Payload-oriented modularity: Identifying the subsets which maximize internal coupling and minimize coupling
between modules is a demanding intellectual exercise influenced by subjectivity.
To achieve reusability, maintainability and flexibility: proper modularization should:• Identify what parts of the system are likely to change.• Locate those parts (i.e. their functionality) in specialized components.• Design inter-module interfaces that are insensitive to the anticipated changes, preventing the
changeable aspects to be revealed by the interface. Changeable parts:
• Subsystems: they are not removed, but can change (EPS, ADCS, COM…)• Payloads hosted by the spacecraft will differ from one mission to another.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 16

Design guidelines for nano-satellite flight software
→ Payload-oriented modularity:
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 17
Checked
Initialized Running
HaltedOne-time action
Idle
Entry point
Exit
Finished
init()
check()
run()
halt()done<osf>()
done
halt()
init()
Common interface for all low-level modules (subsystem and payload control.)
Interface: set of functions that can be invoked outside the module, namely:
• check() – Verify that the subsystem does not present any error. Runs unit tests and reports issues.
• init() – Cleanly initializes subsystem/payload and acquires static resources (e.g. memory, DB connection, starts peripheral’s drivers…)
• run() – Executes routines.• halt() – Resets all system variables and devices,
releases resources and exits.• One-shot functions – Interrupts or duplicates
execution thread, to retrieve instantaneous data (e.g. sensors), trigger internal state transition or to perform one-time actions (e.g. enable DC/DC.)
o The list of OSF is custom to each module.Generic FSM for payload/subsystem modules.

Design guidelines for nano-satellite flight software
→ Towards autonomous spacecraft:
Providing autonomous mission planning capabilities. Concept initially explored by NASA’S DS-1 RAX. Autonomy system:
• Ability to intelligently plan activities.• Ability to robustly execute this plan.• Based on mission goals (e.g. study crop evolution, capture images of volcano eruptions),
deterministic environmental conditions (e.g. orbit position, input power) and system constraints (e.g. battery state-of-charge.)
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 18
Ground-segment-operated: time-tagged telemetry commands are uploaded at
each pass. Task schedule is generated by ground-segment.
Autonomous spacecraft. Mission operators upload/update mission goals.
Tasks are scheduled on board.Change in the operability paradigm

Design guidelines for nano-satellite flight software
→ Towards autonomous spacecraft: Architectural approach: 3 essential
components to design an Autonomy System. Task Planner:
• Collects high-level goals → tasks.• Schedules system resource allocation for their
execution (e.g. memory, storage, power.)• Could prioritize tasks.
Executive System: • Decomposes plan of action.• Perform all procedures to achieve it.• Monitors constraints are not violated.
Task Generation Engine:• Advanced/optional component.• On-board instrument data analysis to trigger
task generation.• Checks system state and proposes
maintenance tasks (e.g. reaction wheels desaturation, database maintenance.)
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 19
Task Planner
Executive SystemTask Generation
Engine
Environmental conditions (predicted)
System constraints
Environmental conditions (actual)
Ground Segment mission goals
higher-priority tasks
lower-priority
tasksplan of action
Control procedures;Spacecraft subsystems
Instrument data;Maintenance requirements
fault diagnosis
Inflicts severe computational burden (CPU time, memory, power).
Forces parts of the Autonomy Sys. to be enabled intermittently (scheduler).

Presentation outline
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 20
Software qualities. System requirements. Where developers
should focus?
Extracted from successful missions and the literature.
Generic; mission-agnostic.
Applicable both in educational and industry contexts.
Our contribution to address critical aspects.
The 3Cat-1 software architecture.
Nano-satellite system and
software characteristics
What are the critical aspects in flight sw. design?
Guidelines for nano-satellite
software design.
Illustrated with an software
architecture.

Applying design criteria: mission context
→ The CubeCAT (3Cat) program: Nano-Satellite and Payload Laboratory at UPC
BarcelonaTech. 3Cat-1:
• Technology demonstrator mission.• Explore the payload capacity of a 1U CubeSat.• 7 payloads
o Visible low-resolution CMOS camera.o Geiger counter based on COTS module.o CellSat: silicon Solar Cells.o Graphene Transistor characterization.o Wireless Power Transfer experiment.o MEMS-based atomic oxygen detector. o Self-powered beacon based on energy-harvesting techniques.
• OBC: AT91SAM9G20, ARM7 at 400 MHz, 64 MB. Test campaign in its last stage. Spacecraft delivery in December 2015, launch
tentative date Jan-Mar 2016. 3Cat-2, 3Cat-3 currently in development.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 21

Applying design criteria: 3Cat-1 software architecture
→ OS: Xenomai 2.6.2.1 + Linux kernel 2.6.35.9 (RT hypervisor approach). Software architecture deployed as non-real-time processes, and real-time tasks.
→ Four-tiered architecture: Inter Process Communication based on RT-pipes, RT-heaps, regular pipes, files and
SQLite3 databases.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 22
SYSTEM CORE
PROCESS MANAGER
SYSTEM DATA BUS
HARDWARE-DEPENDENT MODULES
Heaps
RT kernel managed
Sys. Logs & houskeeping DB’s
High-level system state control (global FSM), Energy states, Autonomy System (Task Planner)
System Executive: state expansion, high-level task decomposition (into processes, routines, etc.)
Command forwarder system. Transparent interface between Procman and HWmod.
Low-level payload and subsystem controllers. Encapsulated with a general purpose interface.
payloadoutputfiles
conf. files
RT pipes
pipes
pipes

Applying design criteria: 3Cat-1 software architecture
→ Hardware-dependent modules (HWmod): Encapsulation of payload and subsystem functionality → 7
processes with the same interface.
→ System Data Bus (SDB): A transparent, reliable and secure interface to low-level processes. Ad-hoc protocol:
• 34 commands (4 to control process FSM and 30 OSF)• 7 control frames (ACK, asynchronous notifications…)
→ Process Manager (Procman): A robust multi-threaded executive. Executes high-level actions. Decomposes mission tasks
into a set of sequential actions. Manages low-level process states.
→ System Core (Syscore): Monitors system vitals/variables: state-of-charge, temperatures,
power input, latch-up’s. Implements high-level (system) Finite State Machine. Encompasses a Fully elastic, priority-based, multi-
resource task planner.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 23
Task Database
IteratorPlanner Prepare SchedulerPlanner
Globals
Schedule
task_planner_globals.pl task_planner_prepare.pl task_planner.pl
task_database.pl Planner
task_planner.out
eps
EPSμC
RFtrans-mitter
comms
IMU &ADCS μC
acs
mems
CPLDCameraμC
camera
WPT > μC
wpt-gt
digital signal
geiger
UART SPI UARTGPIO
UART UART I2C GPIO
OBC process
Externalto OBC
List of HWmod processes and hardware components
Task Planner components (implemented in Prolog)

Conclusion
→ Current nano-satellite trends have not focused on software issues. Nano-satellite designs have explored many techniques and designs to improve the spacecraft
functionality, and system-wide qualities.
→ Due to the current context, three design areas can be improved: robustness, modularity oriented to payloads, spacecraft autonomy. Some of these have been extensively explored for large satellites. Nano-satellites can be an essential element in complex architectures and also require the exploration
of software design techniques and architectural approaches.
→ Three design guidelines are proposed: Generic: mission-agnostic, applicable in educational and industrial programs. Proper encapsulation and hierarchy of components. Re-usable architectures; payload/subsystem modularization & interface definition. Nano-satellites may also benefit from autonomous capabilities.
• Change of paradigm: from command-based to goal-oriented.• An enabler for nano-satellite constellations.• Reduced observability and bandwidth requires intelligent instrument control.• Computational requirements are critical and will determine the availability of such systems.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 24

Thanks for you attention
Carles Araguz – [email protected]
Elisenda Bou-Balust – [email protected]
Eduard Alarcón – [email protected]
General-purpose Payload-oriented Software Architecture for Nano-Satellites 2015 Flight Software Workshop
25Oct. 27th, 2015

Backup slides
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 26

Nano-satellite software techniques and designs
→ Process isolation and protected memory. UNIX process model instead of TSP kernels/middleware.
→ Real-Time Operating Systems: Critical to avoid priority inversion, deterministic execution of critical tasks… Instead of using industry renowned products (i.e. VxWorks, RTEMS, QNX, LynxOS, …)
nano-satellite developers tend to prefer free/open-source alternatives.• Small-footprint: FreeRTOS, uC/COS-III…• Soft-real-time Linux: PREEMPT_RT, Xenomai, uCLinux.
→ FDIR methodology: E.g. ESA’s OPS-SAT CubeSat: dedicated FDIR computer that monitors each payload
through modular controller. Despite complex FDIR systems requiring high computational capabilities, some nano-
satellite programs have analyzed fault trees, and designed procedures to circumvent errors. E.g. TU Delft’s DelFFi (Bräuer 2015).
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 27

Nano-satellite software techniques and designs
→ De-embeddable core: CalPoly’s 2nd Gen. Bus (Manyak, 2011)
→ Decentralized/distributed approaches: AAUSAT3 software (Bønding 2008)
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 28
Static System Processes
Watchdog
System Manager
Beacon
Comms.
Data Logger
Static Mission Processes
ADCS
Payload
Temporary Processes
Export Databa
se
Read State
Read Sensor
s
“One-off” experiments
PolySat Library Base PolySat Library Full
Event Handl
er
Crypto.
Conf. mgnt.
Basic CMD
handler
IPC
Err./Dbg. IF
Database
Payload/ADCS drivers
Linux Kernel
Processes layer
Dynamically-linked libraries
layer
Operative System
Full modeDegraded mode
Diagram extracted from Manyak 2011, and adapted
Electric Power Subsys.Libraries
RTOS (FreeRTOS)
CAN bootloader
AT90CAN128
Flight Plan.
Logger
Libraries
RTOS (FreeRTOS)
CAN bootloader
AT90CAN128
Ground Comms.Libraries
RTOS (FreeRTOS)
CAN bootloader
AT90CAN128
ADCS (2)
Libraries
RTOS (FreeRTOS)
CAN bootloader
AT91SAM7A1
AIS (1) (payload)
Libraries
RTOS (FreeRTOS)
CAN bootloader
AT90CAN128
AIS (2) (payload)
Libraries
OS (uCLinux)
CAN bootloader
ADSP-BF537
ADCS (1)
Libraries
RTOS (FreeRTOS)
CAN bootloader
AT90CAN128
CAN bus

Nano-satellite software techniques and designs
→ Dynamically-linked libraries. Reusable code/segmented software: easy to update/maintain.
→ Software redundancy: Data redundancy: triplicate critical data (e.g. config. params.) in EEPROM (Hishmeh 2009). Bootloader redundancy: triplicate kernel images in NAND.
→ Other techniques: Robust communications:
• Prevent unreliable delivery of digital data (over digital buses, e.g. SPI, I2C, CAN…)• Error Detection and Correction techniques (EDAC): data integrity checks, Ack/Nack, Handshakes,
timeouts… Hardware and software watchdogs:
• Restart modules when unexpected deadlocks happen.• Process heartbeat (between components; also among different CPU’s)
Robust programming.• Strict coding rules.• When applying industry standards for software reliability is too complex or unfeasible, adopt simpler
alternatives: G. J. Holzmann “The power of 10: rules for developing safety-critical code” (NASA/JPL Laboratory for Reliable Software)
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 29

Requirements for next-generation nano-satellite software
→ Assessing the goodness of the software is fundamental to understand the system’s strengths and weaknesses.
→ Software quality: “The degree to which the software possesses a desired combination of quality attributes” (IEEE Std 1061-1992). Quality attributes:
• Non-functional requirements.• Intertwined with each other:
reliability ↔ performance ↔ portability, … • Orthogonal to the software functionality.
Each quality attribute should be weighted in the context of system-specific goals.
Subjective assessment:• The list of attributes is diverse.• Units or numerical representation are usually not
defined.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 30
subsetability
availability
predictabilityusability
conceptual integrity
changeability
extensibility
maintainability
variability
portability
reliability
recoverability
efficiency
performance
inspectability
security

Applying design criteria: 3Cat-1 software architecture
→ Hardware-dependent modules (HWmod) Subsystem HWmod:
• EPS → Controls power management board, performs housekeeping.
• ACS → Interfaces attitude control and determination board.
• Comms. → Implements comms. protocol and delivers telemetry commands to the system.
Payload HWmod:• MEMS, Camera, Geiger, WPT-GT → perform
experiment/demonstration by interacting with the dedicated board and devices.
All of them implement a common interface (check(), init(), run(), halt() and 22 one-shot functions.) Each process is configured with a set of PARAM=<value>
pairs defined in their configuration files. Processes start and remain in idle until a command
arrives. If an error occurs, they are automatically restarted by the architecture.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 31
eps
EPSμC
RFtrans-mitter
comms
IMU &ADCS μC
acs
mems
CPLD CameraμC
camera
WPT > μC
wpt-gt
digital signal
geiger
UART SPI UARTGPIO
UART UART I2C GPIO
OBC process
Externalto OBC

Applying design criteria: 3Cat-1 software architecture
→ System Data Bus (SDB) Transparently, reliably and securely forward commands and data (accounting for
command permission level). Encapsulates/hids low-level architectural structure and components.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 32
PROCESS MANAGER
HWmod1 HWmod2 HWmod3
HWmod1 FIFO’s HWmod2 FIFO’s HWmod3 FIFO’s
Procman FIFO’s
SYSTEM DATA BUS
Implements a custom protocol: • 34 commands (4 to control process FSM
and 30 OSF)• 7 control signals (ACK, asynchronous
notifications…) SDB v2
• Modular Command System → parametrized definition of mission commands: fixed at compile-time.
• SDB is a common command interface for all architectural levels.
• Multi-Level Security domains can be defined to protect critical/system commands.

Applying design criteria: 3Cat-1 software architecture
→ Process Manager (Procman) A robust multi-threaded executive. Executes high-level actions.
• Runs system states triggered by the Syscore.• Notifies subsystem failures (resulting from HWmod.check() invocations or from asynchronous signals.
Decomposes mission tasks into a set of sequential actions.
• Defines and executes task handler routines.• Plan of action defined by Syscore in the
schedule file. Manages low-level process states.
• Through the SDB protocol.• Writes/checks module parameters to configuration files.
Interacts with the kernel to control OBC power states.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 33
CommsCoordinator
Main
Telemetry
Power Sched Watchdog
TaskPSH
Task DB
System Data Bus
x N
Schedule
ProcmanFIFO’s
RT pipes
OBC Powerdrivers
Syscore commands
Standbyrequests

Applying design criteria: 3Cat-1 software architecture
→ System Core (Syscore) Critical management section (RT). Monitors system vitals/variables: state-of-charge, temperatures, power input, latch-up’s. Encompasses an on-board task planner. System State Control:
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 34
System Safety & Sate Control
Syslog
Monitor
Syscore
Watchdog
Standby
Task Manager
Fully Elastic Multi-Resource Priority-based Task Planner
Energy Manager
Orbit Propagator
Resource predictor
Task DBReal-time task or component
Non-real-time process
Controls
Controls
Dynamic input data
Static input data
Schedule
Outcome
to/fromProcess
Manager
RT pipes Sensors
data
Accessible from lower
layers
CONTINGENCY
STANDBY
PAYLOADS
COMMS
IDLE
INIT
Critical energy or initiallization errors
Critical energyor safety issues
Critical energyor safety issues
Comm.window
orenergylevel

Applying design criteria: 3Cat-1 software architecture
→ Autonomy System: Task Planner Fully elastic, priority-based, multi-resource task planner. Constraint-Satisfaction Problem solver. Fully-elasticity:
• Resources capacity: dynamic.• Task “consumptions”: variable.
Types of dynamic resources:• Instantaneous, the removal of activities returns its capacity to
the initial value (e.g. power, subsystem availability);• and cumulative, the removal of activities does not imply returning them to their initial capacity
(e.g. energy, storage).
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 35
Problem definition
Search heuristics and backtracking strategy
Problem specification or partial solution in terms of variables and
constraints
Constraint propagation
Initialconstraints
New constraints (decision)
New constraints (propagation)
Task Database IteratorPlanner Prepare Scheduler
Planner GlobalsSchedule
task_planner_globals.pl task_planner_prepare.pl task_planner.pl
task_database.pl Planner
task_planner.out
Static constraints: environmental/mission constraints (predicted temperature, orbit position, comms. window…)
Implemented in Prolog.

Applying design criteria: 3Cat-1 software architecture
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 36
→ Prolog Task Planner open problems: Cumulative resource with intrinsic limits. Final resource capacity. Performance (CPU time and memory)
→ Affect problem complexity (worsens performance): Number of time units (resolution, scheduling window
width) Number of tasks. Number of resources consumed by each task. Task consumption profiles. Number of cumulative resources. Context (inherent problem restrictions: too much
constrained)
0
10
20
30
40
50
60
70
80
90
0
100
200
300
400
500
600
700
800
900
1000
A100 A100sim.
A200 A300 A400 A500
CPU
tim
e (s
econ
ds)
Logi
cal i
nfer
ence
sM
illio
ns
Performance vs. granularity
CPU time Inferences
612,08
0
100
200
300
400
500
600
700
0
10
20
30
40
50
60
70
1 2 3 4 5 6 7 8 9 10
CPU
tim
e (s
econ
ds)
MB
Number of tasks
Performance vs. number of tasks (ARM machine)
0
50
100
150
200
250
300
350
400
0% 20% 40% 60% 80% 100%
Mem
ory
(MB
)
Completion
Memory (scenario A:500)
Stack Global used Local used Trail used

References
→ J. Bouwmeester, J. Guo, “Survey of worldwide pico- and nanosatellite missions, distributions and subsystem technology”, Acta Astronautica, 2010.
→ D. Selva, D. Krejci, “A survey and assessment of the capabilities of Cubesats for Earth observation”, ActaAstronautica, 2012.
→ D. J. Barnhart, T. Vladimirova and M. N. Sweeting. “Very-Small-Satellite Design for Distributed Space Missions”, Journal of Spacecraft and Rockets, 2007.
→ F. Bräuer, “System Architecture Definition of the DelFFi Command and Data Handling Subsystem”, MSc thesis, TU Delft, 2015.
→ G. Manyak, “Fault Tolerant and Flexible CubeSat Software Architecture”, MSc thesis, CalPoly, 2011.
→ J. Bønding, K. F. Jensen, M. Pessans-Goyheneix, M. B. Tychsen, K. Vinther, “Software Framework for Reconfigurable Distributed System on AAUSAT3”, 2008.
→ S. F. Hishmeh, T. J. Doering, J. E. Lumpp Jr., “Design of Flight Software for the KySat CubeSat Bus”, IEEE Aerospace Conference, 2009.
→ G. Holzmann, “The Power of 10: Rules for Developing Safety-Critical Code”, IEEE Computer, 2006.
→ IEEE Standard for a Software Quality Metrics Methodology, IEEE Std 1061-1992.
Oct. 27th, 2015General-purpose Payload-oriented Software Architecture for Nano-Satellites
2015 Flight Software Workshop 37