grade 11/12 math circles -...
TRANSCRIPT
1
Faculty of Mathematics Centre for Education in
Waterloo, Ontario Mathematics and Computing
Grade 11/12 Math Circles
Fall 2014 - Nov. 26
Optimization and Operations Research, Part 2
Shortest Path
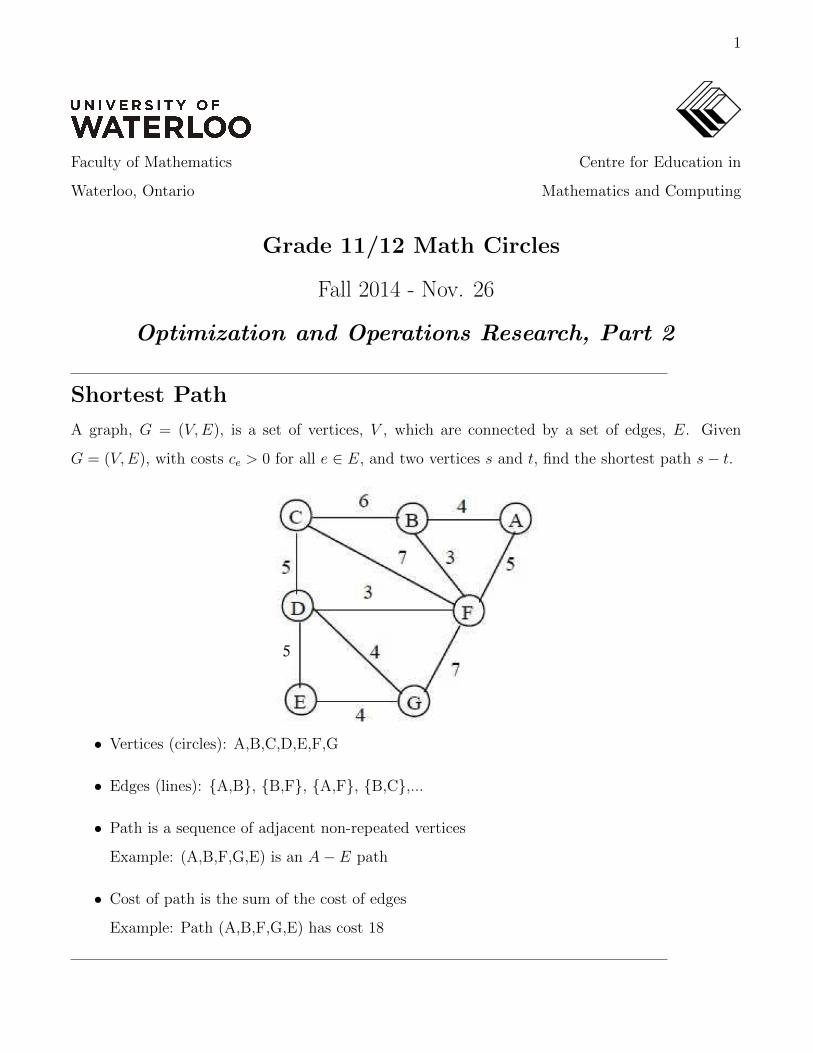
A graph, G = (V,E), is a set of vertices, V , which are connected by a set of edges, E. Given
G = (V,E), with costs ce > 0 for all e ∈ E, and two vertices s and t, find the shortest path s− t.
• Vertices (circles): A,B,C,D,E,F,G
• Edges (lines): {A,B}, {B,F}, {A,F}, {B,C},...
• Path is a sequence of adjacent non-repeated vertices
Example: (A,B,F,G,E) is an A− E path
• Cost of path is the sum of the cost of edges
Example: Path (A,B,F,G,E) has cost 18

2
Dijkstra’s Shortest Path Algorithm
Given G = (V,E), with costs ce > 0 for all e ∈ E, and initial vertex s, find the shortest s− v path
for all v ∈ V .
Dijkstra’s algoritme: Maintain a set S for which we know the shorts s− v path of cost d(v) for all
v ∈ S.
1. Let S = {s}, d(s) = 0
2. For all v 6∈ S that are adjacent to some vertex in S do
1. Compute d′(v) = min{d(u) + cuv : u ∈ S, {u, v} ∈ E}
3. Let w be the vertex with smallest d′(v).
4. Let S ← S ∪ {w} and d(w) = d′(w).
Also, the shortest s−w path will be the shortest s− u path in w appended (where u was the
vertex that determined d′(w))
5. If S 6= V , go to step 2.
* See exercises in slideshow for demonstrations of the algorithm.
Guaranteeing Optimality
Question:
Suppose you give me a path that you claim is the shortest possible. If I don’t trust you (or how
you implemented Dijkstra’s algorithm), how can you convince me that you are right (i.e. you
found the optimal solution)?
This is in general a hard question to answer without looking through EVERY single possible
solution (or in this instance running Dijkstra’s algorithm myself).
It is much easier to prove that a solution is NOT optimal than to prove that it is.

3
Introducing Barriers
Suppose I want to claim that the path (s, a, c, b, t) is the shortest s− t path.
A barrier is defined by a set S ⊂ V such that s ∈ S and t 6∈ S.
Let δ(S) be the set of edges that go from a vertex in S to a vertex not in S.
Let w(S) be a given weight associated to barrier S.
Suppose we define w(S) = 3 for S = {s}.
Any path from s to t must cross the above barrier and have length at least w(S).
Shortest path must have length ≥ 3.
4
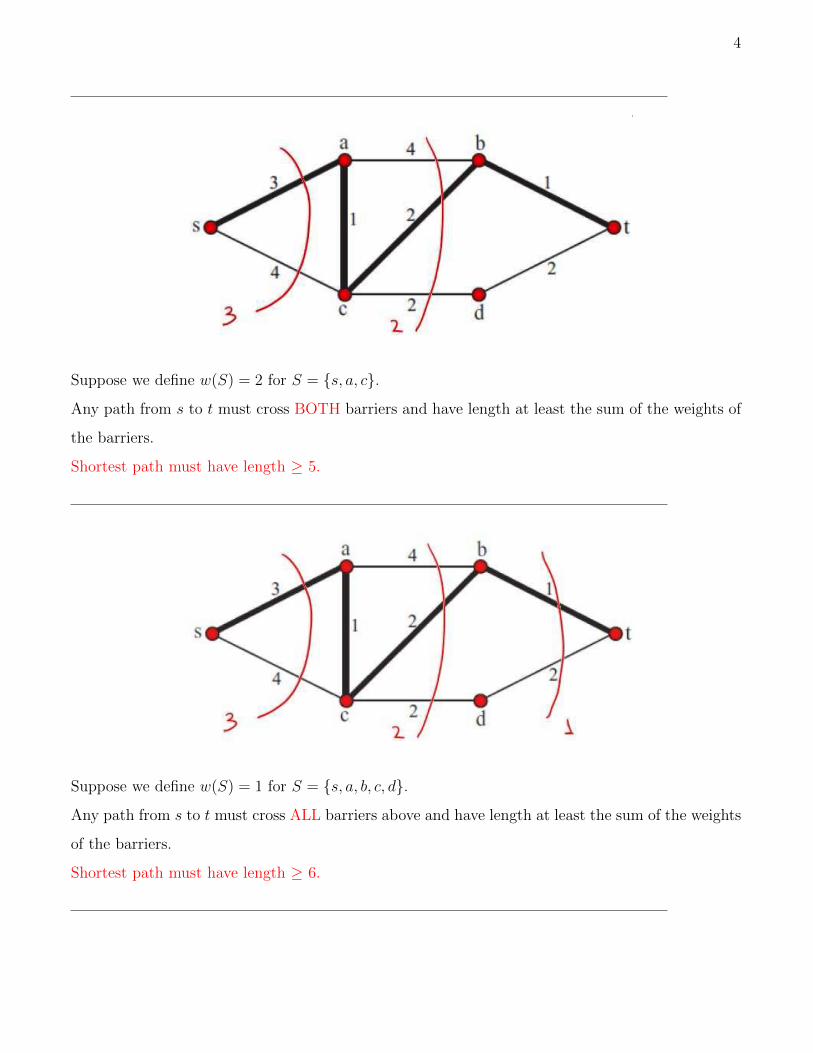
Suppose we define w(S) = 2 for S = {s, a, c}.
Any path from s to t must cross BOTH barriers and have length at least the sum of the weights of
the barriers.
Shortest path must have length ≥ 5.
Suppose we define w(S) = 1 for S = {s, a, b, c, d}.
Any path from s to t must cross ALL barriers above and have length at least the sum of the weights
of the barriers.
Shortest path must have length ≥ 6.
5
Shortest Path With Barriers
• If the length of each edge is at least the sum of the weights of the barriers that it crosses, then
we have a set of “feasible barriers”
• Let l(P ) be the length of a path P and w(B) be the weight of a set of feasible barriers B.
• We argued that:
l(P ) ≥ w(B), for all paths P and feasible barriers B
• Hence we have a min-max relationship:
min{l(P ) : P is a path} ≥ max{w(B) : B is a set of feasible barriers}
Theorem
If
min{l(P ) : P is a path} = max{w(B) : B is a set of feasible barriers}
Then we have found the optimal solution for the shortest path. This is called a certificate of
optimality.
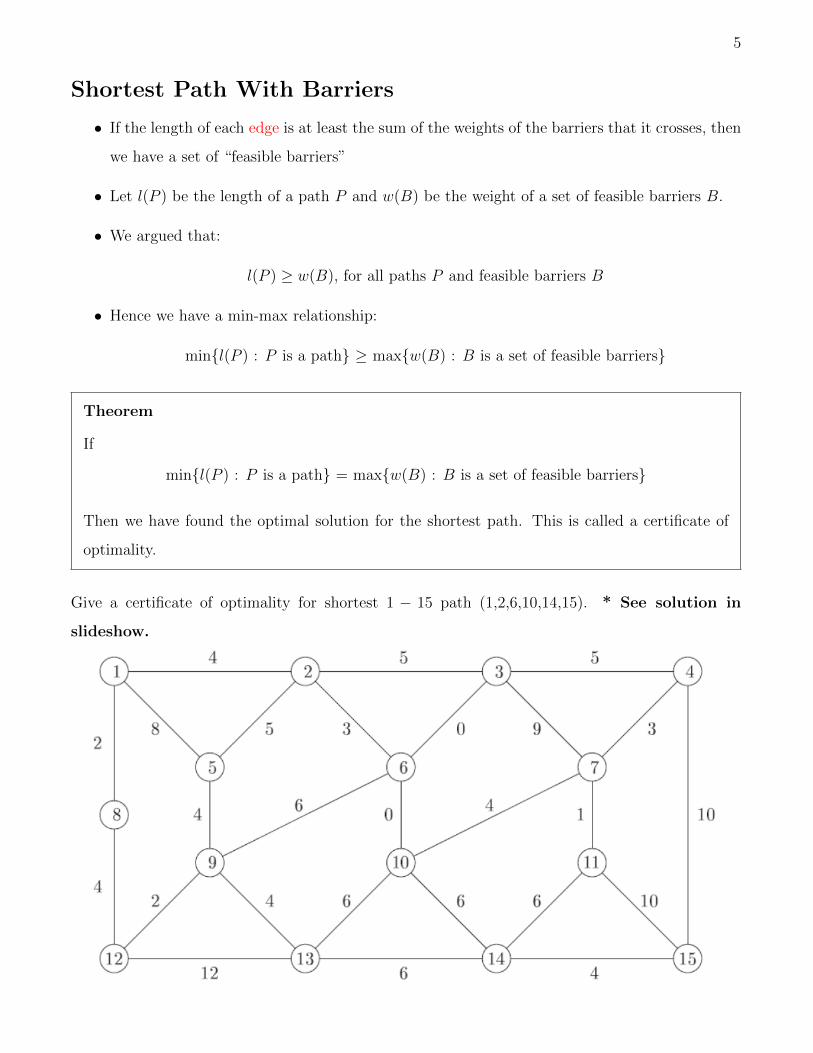
Give a certificate of optimality for shortest 1 − 15 path (1,2,6,10,14,15). * See solution in
slideshow.
6
Linear Programming
Let’s say we have an optimization problem of producing trains and soldiers subject to carpentry
and finishing hours.
max 3x1 +3x2
s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9
x1 ≥ 0
x2 ≥ 0
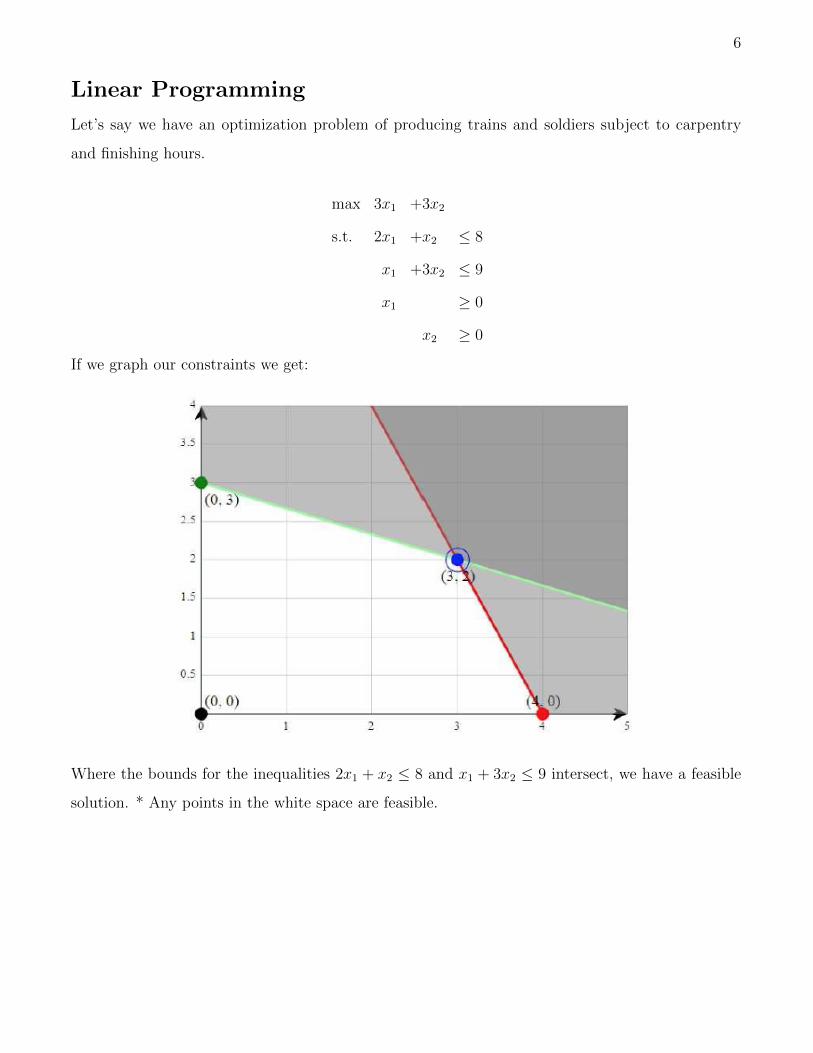
If we graph our constraints we get:
Where the bounds for the inequalities 2x1 + x2 ≤ 8 and x1 + 3x2 ≤ 9 intersect, we have a feasible
solution. * Any points in the white space are feasible.
7
Bounding the Objective Function
Question:
How can we bound the value 3x1+3x2 for any values of (x1, x2) satisfying the constraints below?
max 3x1 +3x2
s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9
x1 ≥ 0
x2 ≥ 0
Let’s add together multiples of our inequality constraints to see if we can find any bounds:
• 3 × 2nd constraint + 6 × 4th constraint:
3x1 + 3x2 ≤ 27
• 3 × 1nd constraint + 3 × 3rd constraint:
3x1 + 3x2 ≤ 24
• 1st constraint + 2nd constraint + 4th constraint:
3x1 + 3x2 ≤ 17
In general, for any y1, y2, y3, y4 ≥ 0:
3x1 + 3x2 = y1(2x1 + x2) + y2(x1 + 3x2) + y3(−x1) + y4(−x2)
= (2y1 + y2 − y3)x1 + (y1 + 3y2 − y4)x2
≤ 8y1 + 9y2
as long as
(2y1 + y2 − y3) = 3
(y1 + 3y2 − y4) = 3
So any solution must have objective value at most 8y1 + 9y2

8
Duality
This leads to the following related optimization problems:
PRIMAL (P)
max 3x1 +3x2
s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9
x1 ≥ 0
x2 ≥ 0
DUAL (D)
min 8y1 +9y2
s.t. 2y1 +y2 −y3 = 3
y1 +3y2 − y4 = 3
y1 ≥ 0
y2 ≥ 0
y3 ≥ 0
−y4 ≥ 0
Theorem (Weak Duality)
Let zP be the objective value of a feasible solution to (P) and zD be the objective value of a
feasible solution to (D). Then
zP ≤ zD
Theorem (Strong Duality)
Let zP be the objective value of the optimal solution to (P) and zD be the objective value of
the optimal solution to (D). Then
zP = zD
Using these theorems we know that if we find an objective value zD that equals an objective value
for zP , we have found upper and lower bounds for (P) and (D) respectively.
For the optimization problem above, we know a feasible solution to (P) is x1 = 3, x2 = 2, with
objective value 15. We can for instance find y1 = 1.2, y2 = 0.6, y3 = y4 = 0 which gives an objective
value of 15 for (D). So 15 is an upper bound for (P) and a lower bound for (D).
9
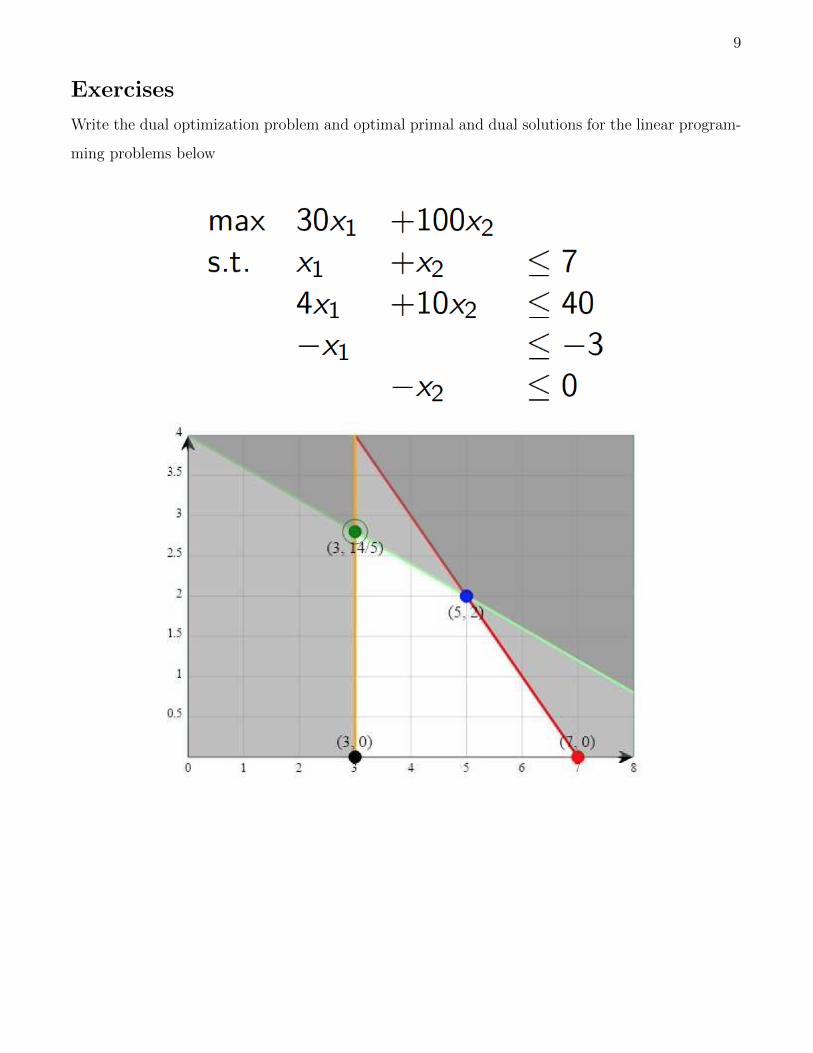
Exercises
Write the dual optimization problem and optimal primal and dual solutions for the linear program-
ming problems below

10