harsh weather operation: increased safety and efficiency · harsh weather operation: increased...
TRANSCRIPT

SST.2012.5.2‐5: Grant no. 314286E‐guided vessels: The 'autonomous' ship
Harsh weather operation: Increased safety and efficiency
Laura WALTHER, Research AssociateFraunhofer Center for Maritime Logistics and Services CML
http://www.unmanned‐ship.org
MUNIN Workshop at SMM10 September 2014, Hamburg/Germany

Motivation (1)
2
“The most common cause of losses in 2013, and for the last 12 years, was foundering (sinking or submerging) [69], accounting for almost three quarters of all losses, with bad weather a significant driver.”
„Foundering remains the main cause of loss, accounting for 45% of losses since 2002.”
Source: Safety and Shipping Review 2014, Allianz Global Corporate & Specialty

Process
Autonomousnavigationsystemdesign
Navigation with regardsto weather
Integrated approach
Test Scenario
Conclusionsand Outlook
3

Process
Autonomousnavigationsystemdesign
Navigation with regardsto weather
Integrated approach
Test Scenario
Conclusionsand Outlook
4

Autonomous navigation system design
5
AdvancedSensor Module (ASM)
Autonomous Ship Controller (ASC)
Autonomous Navigation System (ANS)
CollisionAvoidance (CA)
Weather Routing (WR)
ShoreControl
Centre (SCC)
Autonomous Engine Monitoring and Control(AEMC)

Process
Autonomousnavigationsystemdesign
Navigation with regardsto weather
Integrated approach
Test Scenario
Conclusionsand Outlook
6

Navigation with regards to weather
Guide vessel safely through different weather conditions during voyage
Dangerous phenomena given by MSC.1/Circ. 1228, IMO (2007):
Surf‐riding and broaching‐to
Reduction of intact stability when riding a wave crest amidships
Synchronous rolling motion
Parametric roll motion
The avoidance of these hazards must be ensured by the weather routing module of the ANS.
7

Current state of weather routing
Aim to find the optimal route of a vessel concerning fuel efficiency, ship safety and duration of the voyage considering the weather conditions.
State‐of‐the‐art systems:
Bon Voyage System 7, Voyage Calculation and Fleet Decision Support System 2.0 by AWT a StormGeo Company
Ship Performance Optimisation System (SPOS) by MeteoGroup
Vessel and Voyage Optimization Solution (VVOS) by Jeppesen
Baseline for weather routing of autonomous vessels in harsh conditions
8

Process
Autonomousnavigationsystemdesign
Navigation with regardsto weather
Integrated approach
Test Scenario
Conclusionsand Outlook
9

Integrated Approach
Strategic Weather Routing
WR‐S Long‐term
Optimize route based on weather forecasts (0‐72h and up to 10 days)
A*‐Algorithm with 2D+t
Find the safest and most efficient route
Operational Weather Routing
WR‐O Short‐term
Evaluate real‐time information on weather conditions at the ship’s position and induced ship responses
IMO regulations
Avoid and react to dangerous situations
10

Architecture
11
Static
Operational
Strategic
Operational
Strategic
Voyage Related
ANS WR Module
Documentation

Process
Autonomousnavigationsystemdesign
Navigation with regardsto weather
Integrated approach
Test Scenario
Conclusionsand Outlook
12
Input
Output
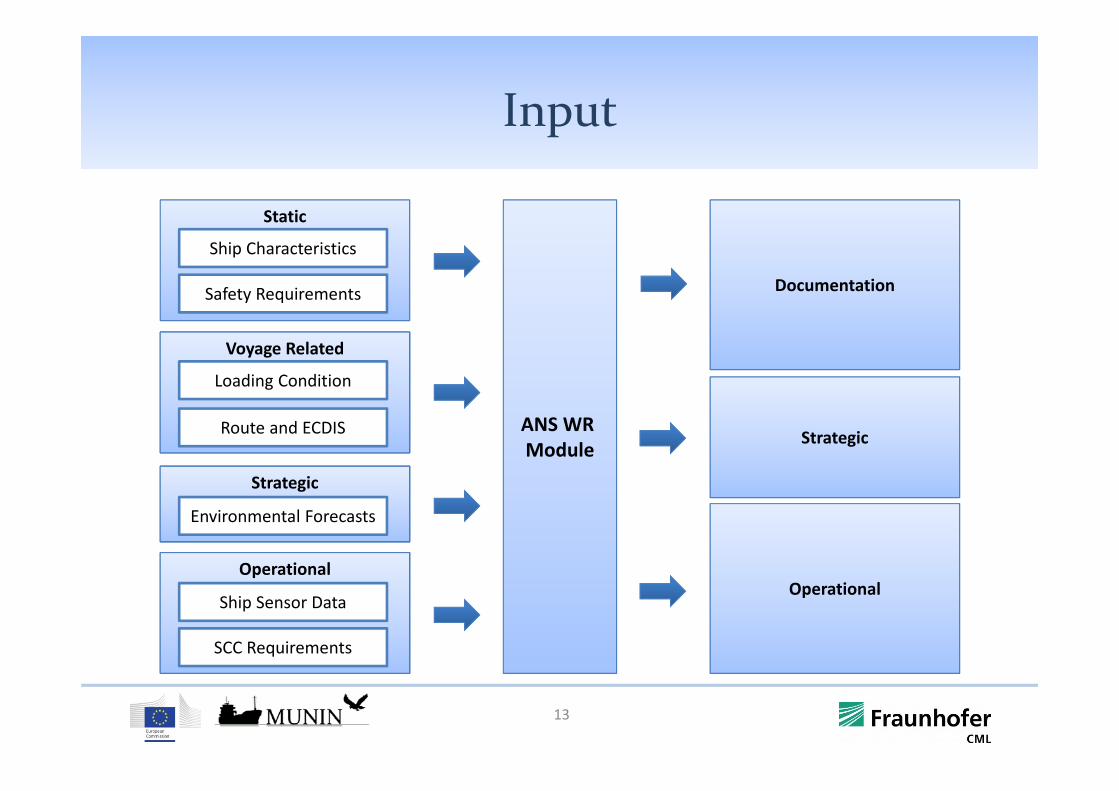
Input
13
Operational
Strategic
Operational
Strategic
Voyage Related
ANS WR Module
Documentation
Static
Ship Characteristics
Safety Requirements
Operational
Strategic
Voyage Related
Ship Sensor Data
Route and ECDIS
Environmental Forecasts
SCC Requirements
Loading Condition

WR‐S: Input
14

Output
15
Operational
Strategic
Operational
Strategic
Voyage Related
ANS WR Module
Documentation
Static
Ship Characteristics
Safety Requirements
Operational
Strategic
Voyage Related
Ship Sensor Data
Route and ECDIS
Environmental Forecasts
SCC Requirements
Loading Condition
Operational
Strategic
Fuel Consumption
Next Waypoint
Voyage Plan
Rudder Angle
Propeller Revolutions
Documentation
Monitoring
Logging
Messages

WR‐O: Polar Plot
16

Process
Autonomousnavigationsystemdesign
Navigation with regardsto weather
Integrated approach
Test Scenario
Conclusionsand Outlook
17

Ship characteristics
18
Characteristics Symbol ValueType ‐ Bulk Carrier
Length Loa 225m
Breadth B 32.26m
Depth D 10.0m
Speed vs 15.4kn
Displacement ∆ 57500t
Wind area lateral AL 2304m²
Wind area frontal Ax 648m²

Safety requirements
Guidance according to MSC.1/Circ. 1228, IMO (2007)
19
Condition Critical when Action
Surf‐riding and broaching‐to 135°< α < 225°and
. √
[kn]
Speed and/or course outside dangerous region
Wave crest amidships 0.6 Lpp < λ < 2.3 Lpp Avoid according wave lengths
Successive high‐wave‐attack λ > 0.8 LppH1/3 > 0.04 Lpp
TE 1.8…3.0 ∙ Tw
Speed and/or course outside dangerous region
Synchronous rolling andparametric rolling motions
TE TRor
TE 0.5 ∙ TR
In following, quartering, head, bow or beam seas adjust
course and speed adequately

WR‐S: Test (1)
20

WR‐S: Test (2)
21

WR‐S: Test (3)
22

WR‐O: Test waypoints
23

WR‐O: Test (1)
24

WR‐O: Test (2)
25

WR‐O: Test (3)
26

Process
Autonomousnavigationsystemdesign
Navigation with regardsto weather
Integrated approach Architecture Conclusions
and Outlook
27

Conclusions & Outlook
Short term application
Navigational support for bridge team by
Visualization
Recommendation for action
Increased safety in harsh weather situations
Outlook
Test and comparison of voyage plan and fuel consumption with dataprovided by Marorka
28

Thank you for your attention
29