iacopo barsotti appunti di geometria ii - math.unipd.itcandiler/didafiles/appunti-geo.pdf · nario...
TRANSCRIPT
Iacopo Barsotti
Appunti di Geometria II(Universit a di Padova 1972–73)

Copyrigth c© 2011-∞
Tutti i diritti su questo testo sono riservati. Non ne e consentito alcun uso a scopi commer-ciali. Sono consentite la riproduzione e la circolazione informato cartaceo o su supportoelettronico portatile ad esclusivo uso scientifico, didattico o documentario, purche il docu-mento non venga alterato in alcun modo, ed in particolare mantenga le corrette indicazionidi data e fonte originale e la presente nota di copyright.
(Iacopo Barsotti)

Indice
Prefazione VII
1 Prodotti esterni, norme, spazio affine 11.1 Lezione 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Lezione 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Lezione 3 (cfr. lezione 45 di [AA]) . . . . . . . . . . . . . . . . . 31.4 Lezione 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.5 Lezione 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.6 Lezione 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.7 Lezione 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.8 Lezione 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.9 Lezione 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.10 Lezione 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.11 Lezione 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.12 Lezione 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.13 Lezione 13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.14 Lezione 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.15 Lezione 15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.16 Lezione 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271.17 Lezione 17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291.18 Lezione 18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2 Spazi proiettivi 352.19 Lezione 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.20 Lezione 20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.21 Lezione 21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.22 Lezione 22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.23 Lezione 23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.24 Lezione 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.25 Lezione 25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.26 Lezione 26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.27 Lezione 27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.28 Lezione 28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
VI Indice
3 Matrici 553.29 Lezione 29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.30 Lezione 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.31 Lezione 31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.32 Lezione 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.33 Lezione 33 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 623.34 Lezione 34 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.35 Lezione 35 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643.36 Lezione 36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 663.37 Lezione 37 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4 Quadriche 694.38 Lezione 38 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.38 Lezione 38bis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.39 Lezione 39 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734.40 Lezione 40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.41 Lezione 41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.42 Lezione 42 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 784.43 Lezione 43 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 804.44 Lezione 44 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 814.45 Lezione 45 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 844.46 Lezione 46 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 864.47 Lezione 47 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 894.48 Lezione 48 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 914.49 Lezione 49 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 944.50 Lezione 50 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 964.51 Lezione 51 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
A La versione del 1969/70 101A.13 Lezione 13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101A.14 Lezione 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102A.15 Lezione 15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104A.16 Lezione 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106A.17 Lezione 17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106A.18 Lezione 18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109A.19 Lezione 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110A.20 Lezione 20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112A.21 Lezione 21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115A.22 Lezione 22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116A.23 Lezione 23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117A.24 Lezione 24 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118A.25 Lezione 25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Elenco dei simboli 123
Indice analitico 125

Prefazione
Il testo su cui mi sono basato per questa trascrizione e una dispensa dattiloscrittae ciclostilata che veniva prodotta dall’allora bidello Franco Mazzuccato del Semi-nario Matematico e venduta agli studenti che seguivano il corso di Geometria II.Una copia di queste dispense e conservata presso la Biblioteca del SeminarioMatematico di Padova.
La qualita del contenuto e la brillantezza dello stile espositivo fanno di questepagine un ottimo testo di lettura per chi voglia approfondire alcuni aspetti, forseoggi ingiustamente trascurati, dei corsi di base di Geometria. Per questo motivole note sono state riprodotte in una forma piu facilmente accessibile, rispetto allevecchie dispense ciclostilate.
Per quanto riguarda la “composizione tipografica” di questepagine,possiamodire che l’utilizzo della macchina da scrivere per la composizione del testo origi-nale presenta notevoli limitazioni rispetto alle possibilita attualmente concesse dalTEX, ma permette comunque, utilizzando eventualmente simboli aggiunti succes-sivamente a mano, di ottenere una sufficiente raffinatezza nelle notazioni, comeben sanno i lettori di testi piu o meno contemporanei pubblicati nei Lecture No-tes della Springer o di note di seminari. Nella trascrizionesi e quindi cercato dimantenersi il piu possibile aderenti alle notazioni originali, comprese alcune abi-tudini tipiche di Barsotti, quali quella di non mettere parentesi sull’argomento difunzioni di una variabile (anche nel volume Appunti di Algebra o in articoli diricerca da lui pubblicati, si trovafv invece del piu consuetof(v)). Non si sonoinvece mantenute le abbreviazioni, molto diffuse nel testo, ed alcune terminologietipiche, quali l’uso del termine “addittivo” in luogo di “additivo”, perche questeultime mi risultano universalmente accettate e il mantenimento del testo originalea rischio di possibili fraintendimenti. In questi casi, cosı come per evidenti erroridi stampa, le modifiche sono state introdotte senza particolari indicazioni nel te-sto. In qualche caso si e comunque ritenuto opportuno evidenziare le differenzeintrodotte rispetto alla lezione originale. Le figure presenti nel testo sono staterealizzate con Metapost cercando di riprodurre fedelmentei disegni presenti nelladispensa.
La speranza e quindi che le lezioni di Barsotti possano essere anche pergli studenti di oggi una lettura appassionante ed uno stimolo ad uno studio piuapprofondito di aspetti pur elementari, ma non per questo banali, della geometria.
Maurizio Candilera

1Prodotti esterni, norme, spazio affine
1.1 Lezione 1
In tutto il corso, salvo esplicito avviso in contrario, tutti gli spazi vettoriali siintendono di dimensione finita. Il corso presuppone la conoscenza del corso diAlgebra; per taluni (pochi) risultati si citera direttamente, con la sigla [AA], ilvolumeAppunti di Algebra, di Iacopo Barsotti (Zanichelli 1968).
Benche la teoria della dualita fra spazi vettoriali si supponga nota dal corsodi Algebra, ne daremo qui definizioni e risultati; per le dimostrazioni vedansi lelezioni 42 e 43 di [AA].
SianoV eW spazi vettoriali sul corpoC; un’applicazione(v,w) 7→ v w diV ×W (prodotto cartesiano) suC e bilinearese e separatamente lineare nellav(per ogniw) e nellaw (per ogniv); e unadualita se intanto e bilineare, e se inoltreaccade che l’unicov (risp. l’unicow) che rendev w = 0 per ogniw (risp. perogni v) sia lo0. Si dice anche cheV , W sono duali l’uno dell’altro nella dualita“”. Altra notazione usata da vari autori (ma mai in questi appunti) in luogo div w e la〈v , w〉.Teorema 1.1.1.SiaV spazio vettoriale suC, e siaW = HomC (V,C). Allora vie una dualita fra V eW data dav w = wv. SeW ′ e un qualsiasi duale diV ,vi e un unico isomorfismof di W ′ su tuttoW tale chev fw′ = v w′ per ogniv ∈ V .
L’(1.1.1) dice che il duale diV e unico a meno di isomorfismi, e che ha lastessa dimensione diV ; lo si indichera in generale conV ∗; altre notazioni spessousate sonoV , V t, tV (quellat e iniziale ditrasposto, che e un altro modo di direduale). L’(1.1.1) dice anche cheV ∗∗ ∼= V ; questoV ∗∗ e il biduale di V , e diregola viene identificato conV .
Due elementiv ∈ V , v∗ ∈ V ∗ diconsi ortogonali se v v∗ = 0; sev1, . . . , vn e base diV , la suadualeo traspostae la basev∗1 , . . . , v∗n di V ∗
tale chevi v∗j = δij (simbolo di Kronecker); notare che l’asterisco appiccicatoad un vettore qualsiasiv, non pensato come elemento di una base, non significaproprio nulla.
SeX e sottoinsieme diV , l’ortogonaledi X e il sottospazioX⊥ (semprecosı indicato) diV ∗ formato dai vettori che sono ortogonali ad ognix ∈ X;

2 Capitolo 1
inoltreX⊥⊥e il minimo sottospazio diV che contieneX. In particolare, seX e
gia sottospazio, alloraX⊥⊥= X.
Lemma 1.1.2.SeU e sottospazio diV , allora dimU + dimU⊥ = dimV .
1.2 Lezione 2
SianoV , U spazi vettoriali suC, e siaf ∈ HomC (V,U). Esiste un’unicaf∗ ∈HomC (U∗, V ∗) tale chev f∗u∗ = fv u∗ per ogniu∗ ∈ U∗; la f∗ e latraspostadi f , e si haf∗∗ = f , (fg)∗ = g∗f∗. Inoltre kerf∗ = (imf)⊥, ondeimf∗ = (kerf)⊥.
Siaf legata alla matriceA = (aij) per mezzo della basev1, . . . , vn di V edellau1, . . . , um di U :
f(vi) =
m∑
j=1
ajiuj;
allora f∗ e legata allatraspostaA∗ di A (ossiaa∗ij = aji) per mezzo delle basiduali delle precedenti. Se in particolareU = V , ossia sef ∈ EndCV , alloraf∗ ∈ EndCV ∗; l’applicazionef 7→ f∗ applica EndCV , che e unaC-algebra, suEndCV ∗, che e pure unaC-algebra; e una reciprocita di algebre.
Parentesi: SeC e un corpo, unaC-algebraM e uno spazio vettoriale suC,non necessariamente di dimensione finita, che sia anche un anello, e tale inoltreche(ca)b = a(cb) = c(ab) per c ∈ C e pera, b ∈ M ; si intende che le opera-zioni di somma in quanto spazio vettoriale e in quanto anellodebbano coincidere.Un’applicazioneg : M → N di unaC-algebra su un’altra e unomomorfismosee tale sia quandoM , N sono considerati come spazi vettoriali, sia quando sonoconsiderati anelli; e unantiomomorfismose e omomorfismo di spazi vettoriali ese inoltreg(ab) = g(b)g(a); e unareciprocita se e un antiomomorfismo iniettivoe suriettivo.
Altra parentesi che servira tra poco: siaG un insieme sul quale e definital’operazione+, associativa e commutativa (per esempio gli interi non negativi).SiaA un anello (risp. unaC-algebra); taleA dicesigraduato, oG-graduato, se esomma diretta di gruppi additivi (risp. di spazi vettorialisuC, non necessariamen-te di dimensione finita)Ag, indicizzati da ung che percorre tuttoG, in manierache il prodotto di un elemento diAg per uno diAh stia in Ag+h. Notare chequando si considerano somme dirette di infiniti enti si intende che ogni elementodi A sia somma di un numero finito di elementi scelti negliAg. Gli elementi diAg diconsiomogenei di gradog; esempio tipico e quello diA = C[x1, . . . , xn],conC corpo edx1, . . . , xn indeterminate; quiG consiste degli interi non negativi,mentreAg e l’insieme (spazio vettoriale suC) delle formedi gradog, ossia deipolinomi ogni cui monomio ha gradog (ivi compreso il polinomio0).

Prodotti esterni, norme, spazio affine 3
1.3 Lezione 3 (cfr. lezione 45 di [AA])
Ricordiamo che ilgruppo simmetricodi ordinen!, indicato conPn, e il gruppodi tutte le permutazioni din oggetti; contiene come sottogruppo invariante diindice 2 il gruppo alternanteAn, che consiste di quelle permutazioni che sonodi classe pari, ossia ottenibili mediante un numero pari di scambi. Se gli oggettisono i numeri1, 2, . . . , n in quest’ordine, per vedere se una certa permutazionep = (p1, . . . , pn) e di classe pari o dispari basta contare il numero delle inversioni:si ha unainversioneogniqualvolta si ha una coppia(pi, pj) coni < j, mapi > pj;classe pari se c’e un numero pari di inversioni. Chiamiamosegnaturadi p, insimboli sgnp, il numero 1 se p ha classe pari, e il numero−1 se p ha classedispari. E come dire chesgnp e l’immagine, nel gruppo moltiplicativo±1,di p modulo il sottogruppo invarianteAn. Quindi sgn(pq) = (sgnp)(sgnq), esgn(p−1) = sgnp. Sen = 1 si prendeP1 = A1 = 1, sgn1 = 1; idem sen = 0.
SiaS un insieme; un’applicazionef di S × · · · × S (n volte) su un corpoCealternantese:
1. f(. . . , si, . . . , sj , . . . ) = −f(. . . , sj, . . . , si, . . . ), ossiaf cambia segno scam-biando due suoi argomenti,
2. f(. . . ) = 0 se due degli argomenti sono uguali.
Notare che, seC non ha caratteristica2, la condizione2 e conseguenza della1, in quanto sesi = sj la 1 da2f(. . . , si, . . . , sj, . . . ) = 0. D’altra parte, se l’Sdi prima e anche spazio vettoriale suC, e se si richiede chef sia multilineare(definizione simile a quella di bilineare, lezione 1), allora per controllare chef siaanche alternante basta verificare la2; la 1 infatti ne segue nel modo seguente (oveprendiamon = 2 per semplicita):
0 = f(u+v, u+v) = f(u, u)+f(u, v)+f(v, u)+f(v, v) = f(u, v)+f(v, u).
Al solito, sen = 0 o n = 1 la definizione precedente cade in difetto; ed allora,sen = 1 ogni applicazione diS in C sara considerata alternante; sen = 0 leapplicazioni alternanti saranno semplicemente gli elementi di C. Notiamo (dondeil nome) che set e una permutazione di1, . . . , n si ha
(1.3.1) f(st1 , . . . , stn) = (sgnt)f(s1, . . . , sn).
SiaV spazio vettoriale di dimensionen suC, e ne siaV ∗ il duale; indiche-remo conEi, odEi(V ) se si vuole essere pignoli, lo spazio vettoriale suC (perora non palesemente di dimensione finita) delle applicazioni i-lineari alternanti diV ∗ × · · · × V ∗ (i volte) suC; quindiE0 = C, E1 = V . Liberiamoci subito delsospetto sulla dimensione:Lemma 1.3.2.Nelle notazioni precedenti, siaf ∈ Ei; allora f(x1, . . . , xi) = 0se lex1, . . . , xi sono linearmente dipendenti.
Teorema 1.3.3.Ei = 0 per i > n; invece per0 ≤ i ≤ n si ha dimEi =(ni
)= n!
i!(n−i)! . Se inoltrev∗1 , . . . , v∗n e base diV ∗, una base diEi e data dalleft
4 Capitolo 1
cosı definite: t e un sottoinsieme ordinato, di cardinalita i, dell’insieme ordinato1, . . . , n; edft manda lai-uplav∗t1 , . . . , v
∗ti su1, ed ogni altrai-upla di elementi
della base, ad indici ordinati, sullo0.
Dim. Per il (1.3.2): se lexj sono linearmente dipendenti, una di esse, per esempiol’ultima, e combinazione lineare delle precedenti:xi =
∑i−1j=1 cjxj, concj ∈ C.
Ed alloraf(x1, . . . , xi) =∑i−1
j=1 cjf(x1, . . . , xi−1, xj) = 0 (perche l’ultimaxj euguale a qualche precedentexj).
Per il (1.3.3): il primo asserto discende da (1.3.2), perch´e inV di dimensionen, non ci sono piu din vettori linearmente indipendenti. Per il resto, basta di-mostrare l’asserto sulla base, dato che
(ni
)e proprio il numero delle sotto-i-uple
ordinate di unan-upla ordinata.Sia dunquef ∈ Ei; alloraf =
∑t f(v
∗t1 , . . . , v
∗ti)ft: infatti ambo i membri
danno lo stesso risultato se applicati ad unai-upla ordinata qualsiasiv∗s1 , . . . , v∗si ;
quindi, per la multilinearita, anche se applicati ad una qualsiasii-upla di elementidi V ∗ (non necessariamente scelti nella base).
Cio dimostra che left generanoEi; resta da dimostrare che esse sono linear-mente indipendenti. Se allora
∑t ctft = 0, conct ∈ C, applicando allai-upla
v∗s1 , . . . , v∗si (cons ordinato) si ottienecs = 0. C.V.D.
1.4 Lezione 4
Siaf ∈ Ei, g ∈ Ej; definiamo ilprodotto esternof ∧ g come l’elemento diEi+j
tale che, perx1, . . . , xi+j ∈ V ∗, si abbia:
(1.4.1) (f ∧ g)(x1, . . . , xi+j) =∑
t
(sgnt)f(xt1 , . . . , xti)g(xti+1, . . . , xti+j
),
ove la somma e estesa a tutte le permutazionit di 1, . . . , i + j per le qualit1 < · · · < ti e ti+1 < · · · < ti+j.
Occorre far vedere chef ∧ g e effettivamente elemento diEi+j; la multili-nearita e ovvia; per l’alternanza, suppongasi per esempio xh = xk conh 6= k;quando nel secondo membro di (1.4.1) tantoh quantok sono fra i primii elementits, oppure fra gli ultimij, quel termine del secondo membro si annulla poichef eg sono alternanti. Se invece si considera un termine, indicizzato dat, nel qualehcade fra i primii ek fra gli ultimi j, per vedere bene la cosa spezziamo la permu-tazionet nei primi i e negli ultimij elementi:t = (T1, T2); e scriviamo il terminecosı:
(1.4.2) sgn(T1, T2) f(xT1)g(xT2
);
nellaT1 sostituiamoh con k, ottenendoS1, e nellaT2 sostituiamok conh, ot-tenendoS2. OraS1 edS2 sono permutazioni che possono essere non piu ordi-nate (ossia gli elementi non piu susseguentesi nell’ordine naturale); ordiniamole,

Prodotti esterni, norme, spazio affine 5
ottenendoZ1 eZ2; nella (1.4.1) c’e anche il termine
sgn(Z1, Z2) f(xZ1)g(xZ2
) =
= sgn(Z1, Z2) ((sgnS1)(sgnZ1) f(xS1)) ((sgnS2)(sgnZ2) g(xS2
)) =
= sgn(S1, S2) f(xS1)g(xS2
) =
= −sgn(T1, T2) f(xS1)g(xS2
).
Ma f(xS1) = f(xT1
), e analogamente perS2 eT2. Quindi questo termine elide il(1.4.2), e in conclusionef ∧ g e alternante.
Fra le seguenti regole solo l’ultima non e ovvia e sara dimostrata:
f ∧ g = (−1)ijg ∧ f sef ∈ Ei eg ∈ Ej ;
f ∧ f = 0 sef ∈ Ei coni dispari;c ∧ f = f ∧ c = cf sec ∈ C ef ∈ Ei;
f ∧ (g + h) = f ∧ g + f ∧ h(1.4.3)(f + g) ∧ h = f ∧ h+ g ∧ h
f ∧ (g ∧ h) = (f ∧ g) ∧ h (onde si scrivef ∧ g ∧ h).
L’ultima si dimostra cosı: intanto, sef ∈ Ei, g ∈ Ej , h ∈ Er, invece discriverext1 , . . . , xti scriviamoxT1
; invece di scriverexti+1, . . . , xti+j
scriviamoxT2
; invece di scriverexti+j+1, . . . , xti+j+r
scriviamoxT3; e quando la permuta-
zione(T1, T2, T3) e la permutazione naturale (ossia ordinata nell’ordine naturale),chiamiamola(I1, I2, I3):
[f∧(g ∧ h)](xI1 , xI2 , xI3) =
=∑
T1 ord(T2,T3) ord
sgn(T1, T2, T3) f(xT1)(g ∧ h)(xT2
, xT3) =
=∑
T1 ord(T2,T3) ord
sgn(T1, T2, T3) f(xT1)
∑
S2 ord,S3 ord(S2,S3) perm.
di (T2,T3)
sgn(S2, S3) g(xS2)h(xS3
) =
=∑
T1 ordS2 ordS3 ord
sgn(T1, S2, S3) f(xT1) g(xS2
)h(xS3).
In questa formulaf non compare in modo diverso dag odh, salvo l’ordinamentof , g, h; percio si raggiunge lo stesso risultato partendo da(f ∧ g) ∧ h. C.V.D.
L’ultima (1.4.3) da, perf = c ∈ E0 = C e tenendo presente la terza,
(1.4.4) c(g ∧ h) = (cg) ∧ h = g ∧ ch
(l’ultima ottenuta sostituendof , g, h con, rispettivamenteg, c, h).

6 Capitolo 1
Ora poniamoE = E(V ) = E0⊕E1⊕· · ·⊕En; e uno spazio vettoriale suCdi dimensione1+n+
(n2
)+ · · ·+
( nn−2
)+n+1 = 2n; see = e0⊕ e1⊕· · ·⊕ en
edf = f0 ⊕ f1 ⊕ · · · ⊕ fn sono elementi diE, definiamo
e ∧ f = e0 ∧ f0 ⊕ (e0 ∧ f1 + e1 ∧ f0)⊕ (e0 ∧ f2 + e1 ∧ f1 + e2 ∧ f0)⊕· · · ⊕ (e0 ∧ fn + · · · + en ∧ f0).
Le (1.4.3), (1.4.4) dicono cheE, con questa definizione, e un’algebra graduata suC, detta l’algebra esternasuV ; gli elementi diEi sono i suoi elementi omogeneidi gradoi (lo 0 e omogeneo di ogni grado).
1.5 Lezione 5
Siav1, . . . , vn base diV , e al solito siav∗1 , . . . , v∗n la base duale diV ∗; gli ele-mentift del Teorema 1.3.3 non sono altro, per la definizione 1.4.1, che i prodottivt1 ∧ · · · ∧ vti ; si puo quindi dire:Teorema 1.5.1.Sev1, . . . , vn e base diV , una base diEi e data dallevt1 ∧· · · ∧ vti , ovet1, . . . , ti e un qualsiasi sottoinsieme ordinato di1, . . . , n.
ed ancheTeorema 1.5.2.I vettori x1, . . . , xi di V sono linearmente dipendenti se, e solose,x1 ∧ · · · ∧ xi = 0.Dim. del (1.5.2). Se essi sono dipendenti, uno di essi e combinazione lineare deglialtri; si ripete allora la prima parte della dimostrazione del Lemma 1.3.2, usandola seconda delle (1.4.3) (tenere presente chexj ∈ E1 e che1 e dispari).
Reciprocamente, sex1, . . . , xi sono indipendenti, essi fanno parte di una basedi V , onde il loro prodotto esterno e elemento di una base diEi per (1.5.1), ed epercio non nullo. C.V.D.
Ora, al solito, il giochetto delle applicazioni lineari: sianoV , U spazi vet-toriali suC, e siaf ∈ HomC (V,U); definiamo un’applicazioneEi(f) = fi =f ∧ · · · ∧ f (i volte) diEi(V ) suEi(U) mediante lafi(x1 ∧ · · · ∧ xi) = fx1 ∧· · · ∧ fxi. Si controlla subito che questa e una buona definizione e chefi ∈HomC (Ei(V ), Ei(U)); quindiF = E(f) = f1⊕· · ·⊕fn ∈ HomC (E(V ), E(U)),per lo meno in quanto spazi vettoriali; maF e anche omomorfismo in quantoC-algebre, dato che
F ((x1 ∧ · · · ∧ xi) ∧ (y1 ∧ · · · ∧ yj)) = fi+j(x1 ∧ · · · ∧ yj) =
= fi(x1 ∧ · · · ∧ xi) ∧ fj(y1 ∧ · · · ∧ yj) =
= F (x1 ∧ · · · ∧ xi) ∧ F (y1 ∧ · · · ∧ yj).
Consideriamo in particolare il caso difn quandof ∈ EndCV edn = dimV ; e unendomorfismo diEn
∼= C; ed ogni endomorfismo diC in quanto spazio vettorialesuC consiste nella moltiplicazione per un elemento diC. In altre parole,fn ∈ C,e per qualunque basev1, . . . , vn di V (od anche non-base) si ha
fv1 ∧ · · · ∧ fvn = fn v1 ∧ · · · ∧ vn.

Prodotti esterni, norme, spazio affine 7
Questofn e chiamato ildeterminantedi f ed e indicato condet f ; poiche leapplicazionif 7→ F , f 7→ fi, quandof percorre EndCV sono chiaramenteomomorfismi1 di C-algebre si ha subito ilTeorema 1.5.3(Teorema di Binet). det(fg) = (det f)(det g).
Inoltre, il Teorema 1.5.2 dice chef e singolare, o degenere(ossia non iniet-tiva, o equivalentemente non suriettiva) se, e solo se,fn = 0:
(1.5.4) det f = 0 se, e solo se,f e singolare.
I (1.5.3) e (1.5.4) messi insieme danno:
(1.5.5) sef e nonsingolare, si hadet f−1 = (det f)−1.
Piu preciso del (1.5.4) e il seguente risultato, conseguenza del (1.5.2):Teorema 1.5.6.Sef ∈ EndCV , il rango di f (ossiadimfV ) e il massimoi per ilqualeEi(f) = fi 6= 0.
Ed ora leghiamo il prodotto esterno con la dualita: oltre agli Ei = Ei(V )vi sono gliE∗
i = Ei(V∗); l’averli indicati con un asterisco fa pensare che essi
siano duali degliEi, in qualche modo canonico determinato dalla dualita “” fraV e V ∗ (duali in qualche dualita lo sono certamente, visto che hanno la stessadimensione); cio e effettivamente vero, come mostra il risultato seguente:Teorema 1.5.7.Per ognii esiste un’unica applicazione bilineare(a, b) 7→ a bdi Ei ×E∗
i suC tale che
(x1 ∧ · · · ∧ xi) (y1 ∧ · · · ∧ yi) = (x1 ∧ · · · ∧ xi)(y1, . . . , yi)
perxj ∈ V , yj ∈ V ∗. Essae una dualita fraEi edE∗i .
Dim. Si vede subito che se l’applicazione bilineare descritta esiste essa e una dua-lita. Per controllare che esista, osserviamo intanto che una (unica) applicazionebilineare con la proprieta descritta esiste quando perx1, . . . , xi si prenda un sot-toinsieme ordinato di una base ordinatav1, . . . , vn di V . Per far vedere che taleapplicazione gode della stessa proprieta quando lexj siano arbitrarie, basta farvedere che continua a goderne se una di esse viene cambiata. Ora, per esempio,se laxi viene sostituita con
∑j cjvj, si ha
(x1 ∧ · · · ∧ xi) y =∑
j
cj(x1 ∧ · · · ∧ xi−1 ∧ vj) y =
=∑
j
cj(x1 ∧ · · · ∧ xi−1 ∧ vj)(y) = (x1 ∧ · · · ∧ xi)(y).
C.V.D.
1Il testo originale riporta la parola “isomorfismi”, ma si tratta di una svista, perche le applicazionitra EndCV ed i vari EndCEi(V ) non sono in generale ne iniettive ne suriettive.

8 Capitolo 1
Agganciando il (1.5.7) a quanto precede si vede che: sef ∈ EndCV edf∗
ne e il trasposto, allora(f∗)n = (fn)∗. Infatti
(v1 ∧ · · · ∧ vn) (f∗)n(v∗1 ∧ · · · ∧ v∗n) = (v1 ∧ · · · ∧ vn)(f
∗v∗1 , . . . , f∗v∗n) =
=∑
t
(sgnt)(v1 f∗v∗t1) · · · (vn f∗v∗tn) =
=∑
t
(sgnt)(fv1 v∗t1) · · · (fvn v∗tn) =
= (fv1 ∧ · · · ∧ fvn)(v∗1 , . . . , v
∗n) =
= fn(v1 ∧ · · · ∧ vn) (v∗1 ∧ · · · ∧ v∗n) =
= (v1 ∧ · · · ∧ vn) (fn)∗(v∗1 ∧ · · · ∧ v∗n).
Ma fn = det f = (det f)∗, onde(fn)∗ = det f ; morale:
(1.5.8) det f∗ = det f.
1.6 Lezione 6
Si e parlato di determinanti, ed e bene far vedere che si tratta proprio della vecchiaconoscenza. Siaf ∈ EndCV , sia v1, . . . , vn base diV , e siaA = (aij) lamatrice legata adf per mezzo di quella base:
fvi =∑
j
ajivj .
Questa da
(det f)v1 ∧ · · · ∧ vn = fv1 ∧ · · · ∧ fvn =∑
j
aj11 · · · ajnnvj1 ∧ · · · ∧ vjn ,
ove la somma e estesa in teoria al variare di ciascunji da 1 a n. Ma se duejihanno lo stesso valore, il prodotto esterno si annulla, cosicche basta far variare laj su tutte le permutazioni di1, . . . , n. Ma allora, indicizzando diversamente siottiene
(det f)v1 ∧ · · · ∧ vn =
∑
j∈Pn
(sgnj)aj11 · · · ajnn
v1 ∧ · · · ∧ vn,
ossiadet f =∑
j∈Pn(sgnj)aj11 · · · ajnn. Il secondo membro di questa e pro-
prio il noto detA, determinante della matriceA. Ora i (1.5.3), (1.5.4), (1.5.5,(1.5.8)assumono il solito significato della teoria dei determinanti. Il (1.5.6) invecefa sorgere il sospetto che glifi che vi compaiono abbiano a che fare con i minoridi A, dato che il rango dif non e che la caratteristica diA, ossia il massimoi per

Prodotti esterni, norme, spazio affine 9
il quale esistono minori non nulli diA di ordinei. Ed infatti, si cerchi la matricelegata adfi, nella base diEi costituita daivt1 ∧· · ·∧vti (cfr. 1.5.1). SeB = (bsr)e questa matrice (e les, r sono orai-uple ordinate di interi positivi≤ n), da unaparte si ha
(1.6.1) fi vr1 ∧ · · · ∧ vri =∑
s
bsrvs1 ∧ · · · ∧ vsi ,
e dall’altra, come piu sopra,
fi vr1 ∧ · · · ∧ vri = fvr1 ∧ · · · ∧ fvri =∑
s
as1r1 · · · asirivs1 ∧ · · · ∧ vsi ,
ove la somma e estesa a priori al variare di ciascunsj da1 an. Ma di nuovo ci sipuo limitare a far variares su tutte lei-uple di interi positivi distinti≤ n, ciascunai-upla presa in tutti i possibili ordinamenti; se infine riordiniamo ciascunai-uplanell’ordine naturale, il coefficiente divs1 ∧ · · · ∧ vsi nella formula precedente di-viene
∑t(sgnt)at1r1 · · · atiri , ovet percorre tutte le permutazioni dis1, . . . , si.
Ora l’espressione precedente e precisamente il minore diA estratto dalle righes1, . . . , si e dalle colonner1, . . . , ri. Se lo indichiamo conAsr, un confronto conla (1.6.1) permette di affermare che1.6.2.La matrice formata coi minoriAsr e legata adfi = f ∧ · · · ∧ f (i volte)mediante la base diEi descritta nel Teorema 1.5.1.
Da qui possiamo dedurre la1.6.3(Regola di Laplace generalizzata). SeA e una matrice quadratan × n, sene scelganoi colonne di indicir1, . . . , ri (in ordine crescente); per ogni scelta dii righe di indici s1, . . . , si (in ordine crescente), siaAsr il minore di queste righee colonne. Siano poiS,R le j-uple (conj = n− i) ordinate complementari delles, r in 1, . . . , n. Allora
detA =∑
s,S
sgn(s, S) sgn(r,R)AsrASR.
Idem scambiando le parole “righe” e “colonne”.Dim. Scriviamo
(det f)vr1 ∧· · ·∧vri ∧vR1∧· · ·∧vRj
= fi(vr1 ∧· · ·∧vri)∧fj(vR1∧· · ·∧vRj
),
e sfruttiamo la (1.6.2) perfi edfj; l’ultima espressione diviene
∑
s,S
AsrASRvs1 ∧ · · · ∧ vsi ∧ vS1∧ · · · ∧ vSj
,
ove, al solito, basta prendere come insiemeS il complementare dis in 1, . . . , n(ordinato, naturalmente). Se ora questovs1 ∧ · · · ∧ vSj
lo vogliamo scrivere come

10 Capitolo 1
vr1∧· · ·∧vri∧vR1∧· · ·∧vRj
(come nella prima formula di questa dimostrazione),si acquista il fattoresgn(s, S) sgn(r,R). C.V.D.
Per finire questa esposizione sull’algebra esterna, osserviamo che e bensı veroche ogni elemento diEi e combinazione lineare di prodotti esterni dii vettori, manon e in generale vero che sia proprio prodotto esterno dii vettori. Cio e pero veronel caso specialei = 1 (banale); donde, vista la simmetria delle dimensioni degliEi, viene il dubbio che debba essere vero anche peri = n− 1. Dimostriamolo:Teorema 1.6.4.Sen = dimV , ogni elemento diEn−1 e prodotto esterno din−1elementi diV .Dim. Fissato un0 6= e ∈ En, per ogni coppia(ei, en−i), conej ∈ Ej , esiste unc ∈ C tale cheei ∧ en−i = ce. L’applicazione(ei, en−i) 7→ c e una dualita fraEi edEn−i (esercizio); la indicheremo, nel caso particolarei = n − 1, con unpuntino invece del solito tondino:en−1 · e1. Sia allora0 6= yn ∈ En−1, ondeyn eelemento di una basey1, . . . , yn di En−1; ne siav1, . . . , vn la base duale diV = E1, e pongasi
a = (v1 ∧ · · · ∧ vn−1) · vn 6= 0.
Ora si hayn · vi = δni, ed anche(v1 ∧ · · · ∧ vn−1) · vi = aδni. Quindi yn =a−1(v1 ∧ · · · ∧ vn−1). C.V.D.
1.7 Lezione 7
SiaV spazio vettoriale suC, e sia(x, y) 7→ g(x, y) una applicazione bilineare diV × V suC, detta ancheforma bilinearesuV . Se la caratteristica diC non e2,pongasi
gs(x, y) =1
2[g(x, y) + g(y, x)] e ga(x, y) =
1
2[g(x, y) − g(y, x)] .
Orags esimmetrica, ossiags(x, y) = gs(y, x), mentrega e alternante, detta ancheantisimmetrica. Quindi per studiare le forme bilineari suV , basta studiare sepa-ratamente le simmetriche e le alternanti, sempre cheC non abbia caratteristica2; nulla naturalmente vieta di dare qualche risultato anche nel caso della carat-teristica2. Sia dunqueg simmetrica o alternante; unx ∈ V dicesi isotropo seg(x, x) = 0 (seg e alternante, sono tutti isotropi); lag e degenerese esiste qual-che vettorex 6= 0 che eortogonalead ogniy: g(x, y) = 0, ondeg(y, x) = 0 perogni y. L’insieme di talix e un sottospazio diV , detto il nucleoed indicato conkerg. Infine, un sottospazio nel quale lag induca la forma bilineare nulla e dettoisotropo2; quest’ultimo concetto, ma non gli altri, resta significativo anche quando
2Segnaliamo la differenza con la terminologia di [D] (Jean Dieudonne,Sur les groupes classi-ques, Publ. Inst. Math. Univ Strasbourg, 1948) ove i sottospazi isotropi sono quelli su cuig induceuna forma bilineare degenere, mentre i sottospazi su cuig induce la forma identicamente nulla so-no detti “totalmente isotropi”. Il testo [MH] (John Milnor eDale Husemoller,Symmetric BilinearForms, Springer Verlag 1973) preferisce il termine “self-orthogonal subspaces”.

Prodotti esterni, norme, spazio affine 11
g sia bilineare qualsiasi. Torniamo allag simmetrica o alternante; seU = kerg, eW e complementare diU in V , la restrizione dig aW e nondegenere: sia infatti0 6= x ∈ W ; se si avesseg(x, y) = 0 per ogniy ∈ W , la stessa varrebbe per ogniy ∈ V , ondex apparterrebbe adU , il che non e. Si puo percio asserire cheV esomma diretta di un sottospazioU sul quale lag e nulla, e di unW sul quale enondegenere. La scelta diU e unica, ma non quella diW ; se peroW1, W2 sonodue scelte diW , e seg1, g2 sono le restrizioni dig aW1, W2 rispettivamente, sipuo porre fraW1 eW2 il seguente isomorfismo: perx ∈ W1 si scrivax = z + y,conz ∈ W2 edy ∈ U ; la x 7→ z e l’isomorfismo voluto. Sex 7→ z edx′ 7→ z′, siha
g2(z, z′) = g(z, z′) = g(z + y, z′ + y′) = g(x, x′) = g1(x, x
′);
insomma, l’isomorfismo diW1 su tuttoW2 cambiag1 in g2. Quindi l’applicazionebilineare (simmetrica o alternante) non degenere legata aduna degenere e unica ameno di isomorfismi, e ci potremo percio limitare a studiarele nondegeneri.
Diciamo subito che seV , U sono spazi vettoriali suC muniti di forme bili-nearig, h, un isomorfismot di V su tuttoU che soddisfa lah(tx, ty) = g(x, y)dicesi unaisometria(rispetto ag, h); gli spazi diconsiisometrici. Con le stessenotazioni, ma senza l’ipotesi di isometria e neppure di uguaglianza di dimensione,lo spazioV ⊕ U puo essere dotato della formak cosı definita:
k(v ⊕ u, v′ ⊕ u′) = g(v, v′) + h(u, u′);
tale forma sara indicata cong ⊞ h e chiamatasomma ortogonale; ancheV ⊕ U ,dotato dig ⊞ h, sara indicato conV ⊞ U e chiamatosomma ortogonale. Se nellaformula precedente che definiscek si usa il− in luogo del+, si ha ladifferenzaortogonale: g ⊟ h, V ⊟ U . I ⊟g, ⊟V , sono ovviamente gli0 ⊟ g e 〈0〉 ⊟ V ,quest’ultimo essendoV dotato di−g. Si noti cheg ⊟ g e V ⊟ V non sono0;quest’ultimo eV ⊕ V dotato dellak(x⊕ x′, y ⊕ y′) = g(x, y)− g(x′, y′).
Un’applicazione bilineare non degenere e anche unaautodualita; se e sim-metrica si chiama unanormasuV , e lo spazioV insieme ad una propria norma eunospazio normato.
Le applicazioni bilineari simmetriche sono intimamente legate alle applica-zioni o forme quadratichesuV . Si chiama cosı un’applicazionef : V → C taleche:
1. f(cx) = c2fx sec ∈ C edx ∈ V ;2. La(x, y) 7→ g(x, y) = f(x+ y)− fx− fy e una forma bilineare, certamente
simmetrica.
Come si vede dalla definizione stessa, ad una forma quadratica f e legatauna bilineare simmetricag, dalla qualef e ricostruibile quando la caratteristicadi C non sia2 col porref(x) = 1
2g(x, x); e questa stessa formula da, per ognig bilineare simmetrica (ed anche non simmetrica), unaf quadratica, sempre chela caratteristica non sia2. Percio, se la caratteristica non e2, alle quadratichesi possono applicare la nomenclatura ed i risultati delle bilineari simmetriche:nucleo, degenereo no,sommaedifferenza ortogonali, vettoriesottospazi isotropi.

12 Capitolo 1
1.8 Lezione 8
Vediamo la traduzione in matrici del contenuto della lezione precedente. Siav1, . . . , vn una base diV ; i vettori diV sono glix1v1+ · · ·+xnvn, conxi ∈ C,
e questi possono essere identificati con le matriciX =
( x1
...xn
)di tipo n × 1; la
forma bilineareg e completamente identificata col dare leaij = g(vi, vj). SeA ela matriceaij , si ha
g
∑
i
xivi,∑
j
yjvj
=
∑
ij
aijxiyj = X∗AY
(al solitoX∗ e la trasposta diX, ossia la matrice(x1, . . . , xn) di tipo 1 × n). Lag e simmetrica (risp. alternante) se, e solo se, laA e simmetrica(ossiaA∗ = A)o rispettivamenteantisimmetrica(ossiaA∗ = −A)3. SeA e simmetrica, la formaquadraticaf ad essa legata (se la caratteristica non e2) e laX 7→ 1
2X∗AX =
12
∑ij aijxixj = f(X); questa e proprio una forma nelle indeterminatexi (qua-
dratica, ossia di grado2) nel senso della lezione 2.SeA, B le matrici di due forme bilineari,g, h (su due spazi), la matrice di
g ⊞ h e(A 00 B
), e quella dig ⊟ h e
(A 00 −B
).
Siau1, . . . , un un’altra base diV , con la trasformazione di basi data da
(1.8.1) uj =∑
i
pijvi.
PostoP = (pij), il vettore rappresentato daX nella basev e rappresentatoda P−1X nella baseu. SeB e la matrice dig nella baseu, si dovra avere(P−1X)∗BP−1X = X∗AX; ma(P−1X)∗ = X∗(P−1)∗, ondeX∗P ∗−1BP−1X =X∗AX, e infine
(1.8.2) B = P ∗AP.
Due matriciA, B, con elementi in un anello commutativo con identita (inquesto caso nel corpoC), che sono legate fra loro dalla (1.8.2), conP matrice adelementi in quell’anello e invertibile in quell’anello, diconsicongruentiin quell’a-nello; la relazione di congruenza e ovviamente un’equivalenza, ossia e riflessiva,simmetrica e transitiva. Nel caso presente due matrici sonocongruenti se, e so-lo se, sono legate alla stessa forma bilineare (od anche quadratica nel caso dellesimmetriche) mediante basi diverse.
3Gia qui dovrebbe porsi l’ipotesi che la caratteristica siadiversa da2. Se la caratteristica fosse2 la definizione data di matrice antisimmetrica coinciderebbe con quella di matrice simmetrica, mala matrice di una forma bilineare alternante deve soddisfare anche la condizioneaii = 0

Prodotti esterni, norme, spazio affine 13
L’essereg non degenere significa che la validita diX∗AY = 0 per ogniYcomportaX∗ = 0; maX∗AY = 0 per ogniY e equivalente aX∗A = 0; quindig e non degenere se, e solo se, laX∗A = 0 comportaX∗ = 0; ossia se, e solo se,A e non degenere (= nonsingolare; insomma, sedetA 6= 0).
Sappiamo che seg e degenere e simmetrica o alternante, si puo scrivereV =U ⊞W , oveg e nulla suU e nondegenere suW ; quindiTeorema 1.8.3.Ogni matriceA simmetrica o antisimmetrica ad elementi in uncorpoe congruente, su quel corpo, ad una matrice del tipo
(B 00 0
), conB nonde-
genere, ed avente ordine eguale alla caratteristica diA.Si puo aggiungere che se la forma quadraticaf e vista proprio come for-
maf(x), nelle indeterminatex1, . . . , xn, uncambiamento di base corrisponde aduna sostituzione lineare nelle indeterminate; se laA di f viene trasformata inuna
(B 00 0
), la f(x) diviene unaf ′(y), ove pero, se l’ordine diB e m < n, le
ym+1, . . . , yn non compaiono; quindi:Corollario 1.8.4. La caratteristica della matrice di una forma quadratica ugua-glia il minimo numero di indeterminate (combinazioni lineari delle date) checompaiono effettivamente nella forma.
Torniamo alla (1.8.2); al solito, la (1.8.1) poteva essere considerata non comeun cambiamento di base, ma come un isomorfismot di V su uno spazioU di baseu1, . . . , un; la (1.8.2) da allora la matrice legata, per mezzo diu1, . . . , un,alla forma bilineare diU che rendet isometria. Facciamo invece di nuovoU = V ,ma cerchiamo quand’e che questat e isometria: oraV ha gia lag, e quindi occorreche laB definita dall’(1.8.2) coincida con laA:
(1.8.5) A = P ∗AP.
Se vogliamo usaret direttamente si ragiona cosı:t e isometria se, e solo se,g(tx, ty) = g(x, y); qualorag sia nondegenere, ossia sia autodualita, e si possaquindi scriverexy in luogo dig(x, y), la precedente divienetxty = xy. Qui,ricordando la trasposizione delle applicazioni lineari, si sarebbe tentati di scrivereindifferentementetx ty = x t∗ty oppuretx ty = t∗tx y, raggiungendo inambo i casi il risultato che:1.8.6.t e isometria (di uno spazio in se) se, e solo se,t∗t = ι (ι=iota, che indicherasempre l’applicazione identica); ossia se, e solo se,t∗ = t−1.
Il risultato e vero, ma e stato raggiunto in modo troppo semplicistico; infattila t∗ definita dat∗x y = c ty non coincide in generale con lat, definita dax ty = tx y; si ha certamente(t)∗ = t∗ = t, ma non si ha net∗∗ = t,
ne ˜t = t. Questo e perche i risultati sulla bidualita sono stati raggiunti, nellalezione2, identificando in modo canonico il biduale diV conV ; il modo canonicoconsisteva nell’identificare la base biduale del biduale diV con la base di partenza.Nel caso presente, il duale diV e gia dato, ed eV stesso con la stessa base; labase duale chissa chi e, e la biduale vattelapesca! Comunque, l’(1.8.6) e vero siacome scritto, sia sostituendovi l’asterisco con la tilde. Se perog e o simmetrica,o alternante (oltre che nondegenere), allorat∗ = t e non ci sono patemi. Per lamatriceP di t, la regola resta l’(1.8.5), anche nel caso degenere.

14 Capitolo 1
SeP e matrice di una isometria diV in se, edA (ossiag) e nondegene-re, prendendo i determinanti di (1.8.5) si ottienedetA = (detP )2 detA, ossia(detP )2 = 1, detP = ±1:Teorema 1.8.7.Le (matrici delle) isometrie di uno spazio con forma bilineare nondegenere sonomodulari, ossia con determinante±1.
Quelle con determinante+1 sono chiamateunimodulari(ma semplicementemodulari da certi autori).
1.9 Lezione 9
Abbiamo visto che ci si puo ridurre allo studio delle forme bilineari suV chesono non degeneri, e che inoltre sono o norme (ossia simmetriche), o alternanti.Ora dobbiamo appunto iniziare questo studio; un po’ di nomenclatura: una normasu V dicesi iperbolica (ed il V munito di essa dicesispazio iperbolico) seVcontiene un sottospazioV1 che e l’ortogonale di se stesso inV ; naturalmente taleV1 e isotropo. Sen = dimV , m = dimV1, si ha dimV ⊥
1 = n−m; maV ⊥1 = V1,
onden − m = m, n = 2m. Quindi gli spazi iperbolici hanno tutti dimensionepari, doppia di quella di un loro qualsiasi sottospazio che sia l’ortogonale di sestesso. Invece, una norma suV dicesiellittica (e lo spazio eellittico)se l’unicovettore isotropo diV e lo 0, ossia sex x 6= 0 perx 6= 0. Quanto alle formealternanti nondegeneri, ci limiteremo a stipulare che uno spazio munito di unatale forma sara detto esso stessoalternante. Le isometrie diV in se prendonoanche nomi diversi nei vari casi: per gli spazi normati si chiamanotrasformazioniortogonali ; per quelli alternanti si chiamanotrasformazioni simplettiche. Glispazi iperbolici e quelli alternanti possono essere trattati in modo simile, comemostra questo primo (e praticamente unico) risultato:Teorema 1.9.1.SeC non ha caratteristica2, uno spazio suC e iperbolico se, esolo se,e somma ortogonale di spazi normati di dimensione2, ciascuno dei qualiha una basev,w tale chev v = w w = 0, v w = 1. Senza ipotesi suC, lostesso vale per gli spazi alternanti.
[Il trucco naturalmente sta nel non aver detto chi ew v, che sara+1 per gliiperbolici e−1 per gli alternanti].Dim. SeV e iperbolico, sappiamo gia che contiene un sottospazioV1 che e l’or-togonale di se stesso; ne siav1, . . . , vm una base. SeV e alternante, siaV1 unsottospazio isotropo massimale (massimale fra gli isotropi); l’ortogonaleV ⊥
1 diV1 in V contieneV1, e non contiene nient’altro: che se0 6= v ∈ V ⊥
1 r V1, alloraV1 + 〈v〉 e ancora isotropo, contro l’ipotesi di massimalita. Qui,come sempre nelseguito, indico con〈S〉 il minimo spazio vettoriale che contieneS.
In ambo i casi, siaw ∈ V tale chevi w = δi1; possibile percheV ∼= V ∗ ∼=HomC (V,C); nel caso alternante,w e gia isotropo, e se lo si chiamaw1, lo spazio〈v1, w1〉 e il primo fra quelli richiesti. Nel caso iperbolicow non e detto che siaisotropo; pongasi alloraw1 = xv1 + w, conx ∈ C; e ancoravi w1 = δi1, ed eanchew1 w1 = 2x + w w. Dato che la caratteristica diC non e2, la x puoessere scelta in modo chew1 sia isotropo; e di nuovo〈v1, w1〉 e il primo degli

Prodotti esterni, norme, spazio affine 15
spazi cercati. Chiamiamolo, in ambo i casi,U1, e consideriamo il suo ortogonaleU⊥1 in V ; questoU⊥
1 e ancora alternante o iperbolico, e la funzione diV1 per essoe assolta da〈v2, . . . , vm〉. Quindi si puo costruire unU2 = 〈v2, w2〉, eccetera.Questo dimostra il teorema in una direzione; nell’altra e ovvio. C.V.D.
Il (1.9.1) dice che per uno spazio alternante (necessariamente di dimensionepari) la base puo essere scelta in modo che la matrice della forma alternante sia
(1.9.2)
0 1−1 0
0 1−1 0
. ... . .
0 1−1 0
(di ordine2m);
e dice anche che se la caratteristica diC non e2, la matrice di una forma iperbolicapuo divenire
(1.9.3)
0 11 0
0 11 0
.. .. . .
0 11 0
(di ordine2m).
Le due matrici sono state ottenute prendendo la basev1, w1, v2, w2, . . . , vm, wm.Se prendiamo la stessa, ma nell’ordinev1, . . . , vm, w1, . . . , wm, le matrici diven-gono
(0 1m
−1m 0
)alternante,(1.9.4)
(0 1m
1m 0
)iperbolico,(1.9.5)
ove1m vuol dire la matrice identica di ordinem.
16 Capitolo 1
Nel caso iperbolico c’e una forma ancora piu simpatica: poniamoxi = vi +wi, yi = vi −wi, e prendiamo la basex1, . . . , xm, y1, . . . , ym; la matrice diviene:
(1.9.6)
2 0 . . . . . . . . . 0
0. . . . . .
......
. . . 2. ..
......
. . . −2. . .
......
. ... . . 0
0 . . . . . . . . . 0 −2
(m elementi= 2 edm elementi= −2).
Se il corpo contiene una radice quadrata di2, dividendo lexi, yi per essa la matriceprecedente diviene
(1m 00 −1m
).
1.10 Lezione 10
Possiamo trarre alcune conseguenze: intanto il (1.9.6) dice che
V = 〈x1, . . . , xm〉⊞ 〈y1, . . . , ym〉 ,
e inoltre che〈y1, . . . , ym〉 e isometrico a⊟ 〈x1, . . . , xm〉. Si ha cosı il “solo se”del risultato seguente:Lemma 1.10.1.Se il corpo non ha caratteristica2, uno spazioe iperbolico se, esolo se,e differenza ortogonale di due spazi normati isometrici.Dim. del “se”. SeV = U ⊟U , conU normato, i vettoriu⊕u, quandou percorreU , formano un sottospazio isotropo diV , di dimensione= dimU , che quindi el’ortogonale di se stesso inV . C.V.D.
Invece una conseguenza del (1.9.4) e la seguente:Corollario 1.10.2.Ogni matrice antisimmetrica di ordine dispari, ad elementiinun anello commutativo con identita, ha determinante nullo. Ogni matrice antisim-metrica di ordine pari, ad elementi in un anello come sopra, ha per determinanteil quadrato di un elemento dell’anello.Dim. Per ora lasciamo perdere l’anello e rimaniamo nel corpoC. Una matriceantisimmetrica di ordine dispari da una forma alternante su uno spazio di dimen-sione dispari, e per quanto visto una tale forma deve essere degenere, cosicche ildeterminante della matrice e0. Nel caso pari, siaA la matrice data; sedetA = 0,bene perche0 e un quadrato. SedetA 6= 0, lo spazio e alternante, e con ba-se oppportuna la matrice diviene quella del (1.9.4), che indichiamo conB. Maallora, per (1.8.2), esiste una matrice invertibileP tale cheA = P ∗BP , ondedetA = (detP )2, come voluto.
Ora prendiamo perC il corpo specialeQ(. . . , tij , . . . ), ove (sen = dimV )le i, j assumono tutti i valori1, . . . , n con i < j, e ove letij sono indeterminate;Q e il corpo razionale. SiaA la matrice antisimmetrica che ha l’elementotij nel
Prodotti esterni, norme, spazio affine 17
postoi, j, l’elemento−tij nel postoj, i, e0 sulla diagonale. Se alloran e dispari,si deve averedetA = 0. Ma detA e un polinomio nelletij a coefficienti interi,ed e il polinomio0; tale quindi resta se letij vengono sostituite con elementiqualsiansi di un anello commutativo con identita.
Se invecen e pari, saradetA = (q(t))2, conq(t) polinomio nellet a coef-ficienti razionali; ma il suo quadrato e a coefficienti interi, quindi q(t) stesso ea coefficienti interi (lemma di Gauss, 4.31 di [AA]). Se di nuovo le tij vengonosostituite con elementi di un anello commutativo con identita, la relazione restavera. C.V.D.
Il q(t) di cui si e appena parlato e definito a meno del fattore±1; possiamodefinirlo completamente col richiedere che esso divenga1, e non−1, quando laA diviene la (1.9.4). Questoq(t) si chiama ilpfaffianodi ordinen.
1.11 Lezione 11
Cosı abbiamo terminato con gli iperbolici e gli alternanti, ed e stato facile trovarlitutti; resta da parlare dei normati non iperbolici. Prima parliamo di fatti generali.Lemma 1.11.1.SeC ha caratteristica6= 2, per ogni norma suV esiste qualchevettore non isotropo. In altre parole, un sottospazio diV e isotropo se, e solo se,tale e ogni suo elemento.Dim. Sev,w ∈ V si ha(v + w) (v + w) = v v + w w + 2v w; se ognivettore fosse isotropo, sarebbev w = 0, assurdo. C.V.D.
Lemma 1.11.2.In uno spazio normato, vettori non isotropi, a due a due ortogo-nali, sono linearmente indipendenti.Dim. Se
∑i civi = 0 (ci ∈ C), si ha0 = vj
∑i civi = cjvj vj, ondecj = 0.
C.V.D.
Un vettorev enormalizzato, o e unversore, sevv = 1; unar-upla di vettorie ortogonalese essi sono a due a due ortogonali; eortonormalese e ortogonaleed ogni suo elemento e un versore; quindi unabase ortonormalee unabase auto-duale, ossia duale di se stessa. Una base ortogonale si riconosce dal fatto che lamatrice legata alla norma per mezzo di essa ediagonale, ossia con elementi tuttinulli fuori della diagonale (principale). La base e ortonormale se questa matrice eaddirittura la matrice identica.Teorema 1.11.3.Sev1, . . . , vn e base diV , esiste una unica norma diV perla quale quella basee ortonormale. Reciprocamente, ogni spazio normato incaratteristica 6= 2 ha basi ortogonali; e se ogniv v, per lo meno per iv diuna base ortogonale,e quadrato di un elemento del corpo, esistono anche basiortonormali.Dim. Per la prima parte, la norma e quella che nella data base e legata alla matriceidentica. Per la seconda, si scelga un vettore non isotropov1 (cfr. 1.11.1); l’orto-gonaleU di 〈v1〉 e normato dalla stessa norma, ed e complementare av1. Se allorail teorema era supposto vero per dimensioni minori di dimV (e lo e per dimensio-ne1), questoU ha base ortogonalev2, . . . , vn, che conv1 da una base ortogonale

18 Capitolo 1
di V . Se infine e vera la faccenda dei quadrati, siaci ∈ C tale chec2i = vi vi;questoci e non nullo perche una norma ha nucleo zero; postoui = c−1
i vi, lau1, . . . , un e base ortonormale. C.V.D.
Teorema 1.11.4.SiaV spazio normato suC, e siaf ∈ EndCV . SeC non hacaratteristica2, la f e trasformazione ortogonale se, e solo se,fv fv = v vper ogniv ∈ V . Se inveceV ha basi ortonormali,f e ortogonale se, e solo se,trasforma una data (e quindi ogni) base ortonormale in una base ortonormale.
Dim. Sefv fv = v v si ha
2(fv fw) = f(v + w) f(v + w)− fv fv − fw fw =
= (v + w) (v +w) − v v − w w = 2(v w),
e laf e ortogonale. Se invecev1, . . . , vn e base ortonormale, si hafvi fvj =f∗fvi vj, e questa coincide conδij = vi vj se, e solo se,f∗ = f−1. C.V.D.
E qui giunto il momento di dire che unamatrice ortogonalee la matriceP di una trasformazione ortogonale rispetto ad una base ortonormale; deve cioesoddisfare la
(1.11.5) P ∗ = P−1.
Invece unamatrice simpletticae la matriceP (di ordine2m) di una trasfor-mazione simplettica rispetto ad una base nella quale la forma alternante abbia lamatrice (1.9.4); deve cioe soddisfare (come conseguenza dell’1.8.5) la
(1.11.6) P ∗ =
(0 1m
−1m 0
)P−1
(0 −1m
1m 0
).
1.12 Lezione 12
E chiaro che uno spazio normato e ellittico se, e solo se, noncontiene nessun sot-tospazio iperbolico di dimensione positiva (perche gli ellittici non hanno vettoriisotropi non nulli, e gli iperbolici ne hanno); invece un iperbolico puo benissimocontenere degli ellittici: per esempio, ogni sottospazio generato da un vettore nonisotropo e ellittico. Tramite vari lemmi vogliamo far vedere che ogni spazio nor-mato, in caratteristica diversa da2, e somma ortogonale di un iperbolico ed unellittico. Anzitutto nella dimostrazione del Teorema 1.9.1 si e visto che ogni sot-tospazio isotropo massimale di un alternante e l’ortogonale di se stesso; facciamovedere che cio vale anche per gli iperbolici:Lemma 1.12.1.Se il corpo non ha caratteristica2, ogni sottospazio isotropomassimale di uno spazio iperbolicoe l’ortogonale di se stesso.
Dim. SiaV iperbolico, eV = V1 ⊕V2, conV1, V2 isotropi e duali l’uno dell’altronella data norma (cfr. 1.9.5). Sian = dimV1 = dimV2; sia poiU isotropo
Prodotti esterni, norme, spazio affine 19
massimale, di dimensionem. A priori m ≤ n (percheU e contenuto inU⊥); sesi dimostra chem = n, resta dimostrato cheU = U⊥. Sia per assurdom < n, esiaW = V1 ∩ U , r = dimW . Se fosser = m, si avrebbeU ⊂ V1 (il segno⊂vuol dire propriamente contenuto), edU non sarebbe massimale. Quindir < meW ⊂ U ; pongasi
U = W ⊕W ′, W ′ non vuoto.
La relazioneV = V1 ⊕ V2 da le due proiezionipr1 epr2 suV1 eV2; sia alloraZl’ortogonale inV1 dellapr2W ′; cosıW e ortogonale aW ′ (perche sono ambeduenell’isotropoU ) ed apr1W ′ (perche sono ambedue nell’isotropoV1), e quindie anche ortogonale apr2W ′ (perche unw′ ∈ W ′ e w′ = pr1w
′ + pr2w′). Di
conseguenzaW e in V1, ed e ortogonale apr2W ′ ondeW ⊆ Z, e certamenteW ⊂ Z, perche dimW = r e
dimZ = n−dimpr2W′ ≥ n−dimW ′ = n−(dimU−dimW ) = n−m+r > r.
Esiste quindi unoz ∈ Z che/∈ W ; questo e isotropo (perche e inV1), e ortogonalea W (stesso motivo), e ortogonale apr2W ′ (perche e inZ), ed e ortogonale apr1W
′ (perche siaz chepr1W ′ sono inV1). Percioz e ortogonale aW ′ ed anchea W , ossia e ortogonale adU . Ma alloraU + 〈z〉 e isotropo ed e piu grandedi U , perchez, essendo inV1, ma non inW , non e inU . cio contrasta con lamassimalita diU . C.V.D.
Lemma 1.12.2.Se il corpo non ha caratteristica2, uno spazio normatoV =Vi ⊞ Ve, conVi iperbolico eVe ellittico non nullo, none iperbolico.Dim. SiaVi = U⊕U ′, conU , U ′ isotropi duali l’uno dell’altro nella norma. DicocheU e isotropo massimale anche inV . Se infattiu⊕u′⊕e (conu ∈ U , u′ ∈ U ′,e ∈ Ve) e isotropo e ortogonale adU , dall’essere(u ⊕ u′ ⊕ e) u1 = 0 per ogniu1 ∈ U , segueu′ = 0; e da(u ⊕ e) (u ⊕ e) = 0 seguee e = 0, ondee = 0.Quindiu⊕ u′ ⊕ e = u ∈ U .
Se oraV fosse iperbolico, scatterebbe il (1.12.1):U sarebbe l’ortogonale dise stesso inV , e si avrebbe dimV = 2dimU = dimVi, assurdo perche dimVe 6=0. C.V.D.
Teorema 1.12.3.Se la caratteristica del corpo none 2, ogni spazio normatoesomma ortogonale di uno ellittico ed uno iperbolico.Dim. SianoV lo spazio,U un suo sottospazio isotropo massimale,U⊥ l’ortogo-nale diU in V , eVe un complementare diU in U⊥. Allora Ve non ha elementiisotropi non nulli, e quindi e normato (1.11.1) ellittico.Se alloraVi = V ⊥
e (in V ),eU ⊆ Vi, e
dimVi = dimV − dimVe = dimV − (dimU⊥ − dimU) =
= dimV − (dimV − dimU) + dimU = 2dimU.
PertantoU e l’ortogonale di se stesso inVi, eVi e normato iperbolico. Ne seguecheVi ∩ Ve = 〈0〉, ed un computo di dimensioni dice cheV = Vi ⊞ Ve. C.V.D.

20 Capitolo 1
1.13 Lezione 13
La decomposizione descritta nel Teorema 1.12.3 e chiaramente non unica; la stes-sa scelta diVe (che ha il solo dovere di essere complementare di qualcosa) lomostra. Vogliamo pero far vedere che e unica a meno di isometrie.Lemma 1.13.1.In caratteristica diversa da2, due spazi normati ellitticiV , Wsono isometrici se, e solo se,V ⊟W e iperbolico.Dim. Il “solo se” discende dal (1.10.1). Per il “se”, siaU sottospazio diV ⊟W chesia l’ortogonale di se stesso; vogliamo intanto mostrare che dimV = dimW (=dimU). Se fosse per esempio dimV > dimW , si avrebbe dimU + dimV >dim(V ⊟W ), ondeU ∩V 6= 〈0〉. Questo spazio sarebbe ellittico (come sottospa-zio dell’ellittico V ) e isotropo (come sottospazio diU ), assurdo. Si e cosı vistoche dimV = dimW = dimU .
OraU ⊕ V = U ⊕ W = V ⊟ W , e quindiU (sottinsieme diV × W ) eun’applicazione biunivocaf di V su tuttoW : precisamente l’applicazione che av ∈ V fa corrispondere l’unicow ∈ W tale chev ⊕ w ∈ U . L’essereU isotropodice chef e isometria:0 = (v ⊕ w) (v′ ⊕ w′) = v v′ − w w′. C.V.D.
Teorema 1.13.2(di estensione delle isometrie - Ernst Witt). Sia V uno spazionormato su un corpo di caratteristica diversa da2; siaU un sottospazio diV , nonnecessariamente normato, e siaf una isometria diU suV (naturalmente non sututto V , ma semplicemente sufU ). Allora esiste una trasformazione ortogonaleg di V tale chegu = fu peru ∈ U .Dim. Diremo semplicemente che “laf e estendibile ad una isometriag di V ”.Fra gli spaziU ′ ⊆ V , ma contenentiU , ai qualif e estendibile ve ne sara unomassimale; possiamo supporre che questo sia lo stessoU . La dimostrazione siarticola poi in tre passi.(a) Dico cheU e normato: se infatti il nucleo di “” in U contiene unu 6= 0, siaWcomplementare di〈u〉 in U . Siav ∈ V ortogonale aW e tale chev u = 1; allorav /∈ U (percheU e ortogonale adu), e col metodo usato nella dimostrazione delTeorema 1.9.1 questov puo essere trovato anche isotropo. Siav′ analogamentelegato adfU , fu, fW ; si puo allora estenderef : U → fU ad unaf ′ : U⊕〈u〉 →fU ⊕ 〈v′〉 col richiedere chef ′v = v′. Ma cio contrasta con la massimalita diU .(b) SiaZ = U⊥ (in V ) e siaZ ′ = (fU)⊥ (in V ). per(a), Z eZ ′ sono normati,e complementari inV di U , fU rispettivamente. Per (1.12.3) si puo scrivereZ = Zi ⊞ Ze, Z ′ = Z ′
i ⊞ Z ′e; voglio dimostrare cheZe, Z ′
e sono isometrici, peril che, a norma del (1.13.1), basta dimostrare cheZe ⊟ Z ′
e e iperbolico. E infatti,V ⊟ V = (U ⊟ fU) ⊞ (Z ⊟ Z ′), e Z ⊟ Z ′ = Z ′′
i ⊞ Z ′′e . Allora V ⊟ V =
(U ⊟ fU) ⊞ Z ′′i ⊞ Z ′′
e ; maV ⊟ V e U ⊟ fU sono iperbolici per (1.10.1); talee allora(U ⊟ fU) ⊞ Z ′′
i ; il (1.12.1) comporta dunque cheZ ′′e = 〈0〉, ossia che
Z ⊟Z ′ e iperbolico. Ne segue che anche(Zi ⊟Z ′i)⊞ (Ze ⊟Z ′
e) e iperbolico, e ilsolito ragionamento ci dice cheZe ⊟ Z ′
e e iperbolico, come voluto.(c) SeZe eZ ′
e sono isometrici, tali sono ancheZ, Z ′, visto che hanno la stessadimensione. Siaf ′ una isometria diZ su tuttoZ ′; ora laf : U → fU puo essereestesa ad unag : V = U ⊞ Z → fU ⊞ Z ′ = V cosı: g(u ⊕ z) = fu ⊕ f ′z).C.V.D.
Prodotti esterni, norme, spazio affine 21
Si noti che questo finale dice che in realta doveva essere finoda principioU = V , Z = 0.
Possiamo terminare con ilTeorema 1.13.3.SeV espazio normato su un corpo di caratteristica diversa da2, e se come nel (1.12.3) si scriveV = Vi ⊞ Ve = V ′
i ⊞ V ′e , conVi, V ′
i iperbolicieVe, V ′
e ellittici, esiste una trasformazione ortogonalef di V tale chefVi = V ′i ,
fVe = V ′e .
Dim. Per (1.10.1),V ⊟V e iperbolico; maV⊟V = (Vi⊟V ′i )⊞(Ve⊟V ′
e), onde, per(1.12.2), ancheVe ⊟ V ′
e e iperbolico; ma allora, per (1.13.1), esiste una isometriaf di Ve su tuttoV ′
e ; questo dice intanto cheVe e V ′e hanno la stessa dimensione,
il che a sua volta comporta che ancheVi eV ′i hanno la stessa dimensione; percio
c’e una isometriag di Vi su tuttoV ′i . Laf ⊞ g e quella chiamataf nell’enunciato.
C.V.D.
1.14 Lezione 14
Siamo cosı ridotti, per classificare tutti gli spazi normati, alla classificazione degliellittici. “Classificare” in Matematica significa nella migliore delle ipotesi dareuna regola per costruirli tutti, e per riconoscere se due distinti sono o no la stessacosa (isometrici, nel caso presente). Questo traguardo e raramente raggiunto, edallora ci si contenta di classificare certi enti col dire (ossia dimostrare) che essisono in corrispondenza biunivoca con enti gia noti, o piu facili da studiare. Perquesto e spesso utile riuscire a presentare le strutture inistudio sotto “forma ca-nonica”, che vuol dire forma di tipo prestabilito, di facileispezione e confronto.Vediamo il caso degli spazi normati; intanto, un tale ente euno spazio con unanorma; siccome ci sono gli spazi senza norme, ma non le norme senza spazi, par-leremo di classificazione delle norme. Poniamo due normef , g sul corspoC (dicaratteristica non2) nella stessa classe se, e solo se, le loro componenti ellittichesono isometriche, ed indichiamo con[f ] la classe dif ; ogni classe contiene unanorma ellittica, unica a meno di isometrie. SeWC e l’insieme delle classi di normesul corpoC, in WC si puo definire l’operazione+ cosı: [f ]+ [g] = [f⊞g] (verifi-care che e una buona definizione!).E associativa e commutativa; c’e uno0 (zero),che e la classe[0] costituita da tutte le norme iperboliche; c’e−[f ] = [⊟f ]. In-sommaWC e un gruppo abeliano, ilgruppo di Wittdi C; in generale e arduo il cal-colarlo, ma alcuni casi sono semplici (ed ecco visto un esempio di classificazionemediante riduzione a qualcosa di gia studiato; in questo caso, un gruppo).
Per esempio, seC e algebricamente chiuso, ogni norma ha basi ortonormali(1.11.3), e quindi tutti gli spazi normati della stessa dimensione sono isometrici:iperbolici se di dimensione pari, e somma ortogonale di un iperbolico e di unoellittico di dimensione1 se di dimensione dispari. Quindi:1.14.1.SeC e algebricamente chiuso e di caratteristica non2, il gruppo di WittWC e isomorfo al gruppo0, 1, con1 + 1 = 0.
Altro caso facile e quello deicorpi ordinati: si chiama cosı un corpoC checome gruppo additivo sia un gruppo ordinato, e tale inoltre che il prodotto di
22 Capitolo 1
due positivi sia positivo; ne segue subito che piu per meno fa meno, che meno permeno fa piu, e che i quadrati (eccetto lo zero) e le loro sommesono positivi; hannocertamente caratteristica0. Per questi il risultato e meglio espresso direttamentesugli spazi normati:Teorema 1.14.2(di Sylvester o Regola d’inerzia). SiaV spazio normato sul corpoordinatoC; esistono allora degli interim, n, conm+ n = dimV , tali che ognibase ortogonale diV contengan elementiv per i qualivv > 0, edm per i qualiv v < 0.
Dim. Sianov1, . . . , vn+m, w1, . . . , wr+s due basi ortogonali, convi vi > 0se i ≤ n, e < 0 se i > n, e conwi wi > 0 se i ≤ r, e < 0 se i > r;occorre dimostrare cher = n. Dico che i vettoriv1, . . . , vn, wr+1, . . . , wr+s
sono linearmente indipendenti. Se infatti
n∑
i=1
xivi =r+s∑
j=r+1
yjwj ,
moltiplicando (ossia tondinando) ciascun membro per se stesso si ottiene
n∑
i=1
x2i vi vi =r+s∑
j=r+1
y2jwj wj;
il primo membro e non negativo, il secondo nonpositivo, onde sono ambedue nulli.Ma allorax2i = y2j = 0 per l’ordinamento. Cio dimostra chen+ (n+m− r) ≤n+m, ossia chen ≤ r; analogamenten ≥ r, onden = r. C.V.D.
Nelle notazioni del Teorema 1.14.2, l’interon − m dicesi indice d’inerziadella norma, o dello spazio od anche della forma quadratica legata alla norma.Corollario 1.14.3. Notazioni come nel (1.14.2); seC ha anche la proprieta cheogni suo elemento positivoe un quadrato (come il corpo reale), esistono basiortogonali tali chev v = ±1 per ogni loro elemento.
Dim. Nel (1.14.2) basta dividere ogniv per(vv)1/2 sevv > 0, o per(−vv)1/2sev v < 0 C.V.D.
Quest’ultimo dice che
Corollario 1.14.4. SeC e come nel Corollario 1.14.3, il gruppo di WittWC eisomorfo al gruppo additivo degli interi razionali.
Tutte queste cose possono essere dette in termini di matricio di forme qua-dratiche, nel qual caso non e piu necessario fare l’ipotesi di nondegenerazione chee necessaria per le norme. Sappiamo che una forma quadratica, o una bilinearesimmetrica, e determinata dalla propria matrice; e che dueforme quadratiche so-no isometriche, ossia trasformabili l’una nell’altra mediante sostituzione linearedelle indeterminate, se, e solo se, le loro matrici sono congruenti, e cioe legatedallaB = P ∗AP conP invertibile. Ora gli (1.11.3), (1.8.3), (1.14.2), (1.14.3)possono essere riuniti nel seguente

Prodotti esterni, norme, spazio affine 23
Teorema 1.14.5.Ogni matrice quadrata simmetricaA ad elementi in un corpoCdi caratteristica diversa da2 e congruente, suC, ad una matrice diagonale, dettala forma canonica per congruenza diA; il numero degli zeri sulla diagonaleeinvariante, ossiae lo stesso per tutte le forme canoniche diA. SeC e ordinatosono invarianti anche il numero degli elementi diagonali positivi e quello deglielementi diagonali negativi. SeC e algebricamente chiuso, tutti gli elementi dia-gonali non nulli possono essere scelti uguali ad1. Se infineC e ordinato, ed ognisuo elemento positivoe un quadrato, vi sono forme canoniche (di Sylvester) in cuigli elementi diagonali assumono solo i valori0, 1, −1.
Questo si collega con altre considerazioni: siaC ordinato, e sia
f(x) =∑
1≤i,j≤n
aijxixj (conaij = aji)
una forma quadratica vista come polinomio. Se allex si danno valoriy in C,la y 7→ f(y) e un’applicazione diC × · · · × C in C (funzione din variabiliindipendenti); bene, la forma quadratica e detta:
• definita positiva(risp. negativa) sef(y) > 0 (risp. f(y) < 0) per ogniy 6= 0;• semidefinita positiva(risp. negativasef(y) ≥ 0 (risp. f(y) ≤ 0) per ogniy 6= 0;
• indefinitanegli altri casi.
Al lume del (1.14.5) si puo dire che:
1. La forma e definita positiva (risp. negativa) se, e solo se, tutti gli elementidiagonali di una forma canonica per congruenza della sua matrice sono positivi(risp. negativi);
2. La forma e semidefinita positiva (risp. negativa) se, e solo se, tutti gli elementidiagonali di una forma canonica per congruenza della sua matrice sono≥ 0(risp.≤ 0).
Attenzione le norme legate a forme quadratiche definite (positive o negative)sono ovviamente tutte ellittiche; se inC ogni elemento positivo e un quadrato,anche il reciproco e vero; ma in altri corpi puo essere falso: per esempio, sulcorpo razionale, la forma di matrice
(1 00 −2
)e ellittica ma non definita!E utile
poter riconoscere la definitezza della matrice data senza dover prima trasformarlaa forma canonica; il risultato che segue raggiunge appunto questo scopo, e mostrafra l’altro che la definitezza dipende solo dai coefficienti della forma (mentre echiaro che l’ellitticita dipende anche dal corpo nel qualeessi si considerano im-mersi, e puo quindi cambiare con l’ingrandirsi di questo corpo). Ricordiamo cheunminore principaledella matrice quadrataA e il determinante di una matriceBottenuta daA cancellandovi certe righe e le colonne con gli stessi indici; e unacatenadi tali minori e costituita didetB1,detB2, . . . ,detBn, oveBi ha ordinei(ondeBn = A), eBi e ottenuta daBi+1 cancellando una riga e la corrispondentecolonna. Ed allora:

24 Capitolo 1
Teorema 1.14.6.SiaC un corpo ordinato, siaf una forma quadratica suC e nesiaA la matrice in una certa base. Alloraf e definita positiva se, e solo se, una,e quindi ogni, catena di minori principali diA e costituita di numeri positivi.Edefinita negativa se−f e definita positiva.Dim. Sia f definita positiva e siav1, . . . , vn base diV ; in 〈v1, . . . , vi〉 la finduce una forma definita positiva, la cui matriceAi e estratta dalle primei righe ecolonne dellaA; pertanto laAi ha una forma canonicaBi = P ∗
i AiPi ad elementidiagonali tutti positivi. Ma alloradetAi = detBi(detP )−2 > 0.
Reciprocamente, siaf non definita positiva, e siai il minimo intero tale che laf non sia definita positiva su〈v1, . . . , vi〉; lo e pero su〈v1, . . . , vi−1〉, ondeAi−1
ha forma canonicaBi−1 = P ∗i−1Ai−1Pi−1 ad elementi diagonali positivi. Posto
Pi =(Pi−1 00 1
)(di ordinei), laBi = P ∗
i AiPi e matrice non definita positiva; ma
esiste una sua forma canonica(
Bi−1 00 bi
)(dimostrarlo!), ondebi ≤ 0 edetB′
i ≤0, che a sua volta comportadetBi ≤ 0, detAi ≤ 0. C.V.D.
1.15 Lezione 15
Vi e la nozione di “orientamento” di uno spazio (anche non vettoriale), che inrealta e una nozione di tipo topologico: qui la esporremo in modo algebrico peralcuni casi particolari.
Caso di uno spazio vettoriale V su un corpo ordinato C Fra lebasiordinate di V poniamo una relazione di equivalenza (che puo essere chiamataequiorientamento) col definire
(v1, . . . , vn) ∼ (w1, . . . , wn) se, e solo se,v1 ∧ · · · ∧ vnw1 ∧ · · · ∧ wn
> 0;
qui, quel rapporto significadet f sef e l’endomorfismo dato dafwi = vi. SeL1, L2 sono le due classi in cui le basi ordinate vengono suddivise dalla relativapartizione,L1 edL2 sono i dueorientamentidi V , eV stesso, dotato di uno diessi, e unospazio vettoriale orientato; si noti che in questo caso lo spazio non erasupposto normato.
Caso di uno spazio vettoriale normato V con basi ortonormali su uncorpo C di caratteristica 6= 2 Fra le basi ordinate ortonormali diV poniamoancora una relazione di equivalenza∼ col definire(v1, . . . , vn) ∼ (w1, . . . , wn)se, e solo se, laf del caso precedente, che ora sara ortogonale, e unimodulare.Valgono le altre definizioni come nel caso precedente; seC e anche ordinato, eVha basi ortonormali, le due definizioni non si contraddicono.
In ambo i casi e piuttosto ovvio lo stabilire quand’e che unautomorfismofdi V ha diritto ad essere chiamatoorientato, ossia quand’e chef conserva l’o-rientamento: dovra esseredet f > 0 nel primo caso, e nel secondof dovra essere

Prodotti esterni, norme, spazio affine 25
trasformazione ortogonale unimodulare. Tuttavia in matematica, ingenerale, nonappena si e definito un oggetto con una certa struttura ci si pone il problema didefinire i sottooggetti che ereditano quella struttura; nelcaso presente non e affat-to chiaro come un sottospazio di uno spazio orientatoV riceva automaticamenteun orientamento, neppure nel caso piu semplice di sottospazi di dimensione1 (nelqul caso l’orientamento si chiama anche ilverso). Questa non chiarezza rispec-chia il fatto che non e possibile; il significato di cio (guardarselo bene, che ledimostrazioni di impossibilita, di cui questa e un caso minimo, sono state le ulti-me arrivate nello sviluppo logico dell’uomo) sara chiarito dall’esempio seguente:spazio di dimensione3, con orientamentoL contenente base ordinata(u, v, w);
sottospazio〈u, v〉; endomorfismof :
u 7→ v
v 7→ u
w 7→ −w
. Questof mandaL suL ma
manda l’orientamento(u, v) nel (v, u).Torniamo alle definizioni; nel secondo caso (spazio normatocon basi orto-
normali) si puo dire di piu. Scelto un orientamentoL, sia(v1, . . . , vn) una baseortonormale ordinata che gli appartiene; se(x1, . . . , xn) e unan-upla ordinata divettori, il numero
(x1 ∧ · · · ∧ xn) (v1 ∧ · · · ∧ vn) =x1 ∧ · · · ∧ xnv1 ∧ · · · ∧ vn
(cfr.1.5.7)
e indipendente dalla scelta di(v1, . . . , vn) in L. Tale numero dicesi ilvolumedellan-upla ordinata(x1, . . . , xn), ed indicasi con|x1, . . . , xn|; area sen = 2,lunghezzasen = 1. Esso cambia di segno se si cambia l’orientamento.
Teorema 1.15.1.Nelle ipotesi precedenti, si ha
|x1, . . . , xn|2 = (x1 ∧ · · · ∧ xn) (x1 ∧ · · · ∧ xn).
Dim. Se infattic e il volume, si ha
c2 = (x1 ∧ · · · ∧ xn) c(v1 ∧ · · · ∧ vn) = (x1 ∧ · · · ∧ xn) (x1 ∧ · · · ∧ xn).
C.V.D.
Il (1.15.1) suggerisce che se si ha uno spazio normatoV anche senza orien-tamento, di dimensionen, e se(x1, . . . , xn) e unar-upla di suoi vettori, conrqualsiasi, si puo chiamarequadrato del suo volumeed indicare con|x1, . . . , xr|2il numero(x1 ∧ · · · ∧ xr) (x1 ∧ · · · ∧ xr). Per computarlo in pratica quandoVha basi ortogonali si procede cosı: sia
x1 ∧ · · · ∧ xr =∑
s
asvs1 ∧ · · · ∧ vsr ,
ove v1, . . . , vn e una base ortonormale diV , ed (s1, . . . , sr percorre tutti isottoinsiemi ordinati di1, . . . , n di cardinalitar. Allora (avendosi una base

26 Capitolo 1
ortonormale)
(1.15.2) |x1, . . . , xr|2 =∑
s
a2s(vs1 ∧ · · · ∧ vsr) (vs1 ∧ · · · ∧ vsr) =
=∑
s
a2s(vs1 vs1) · · · (vsr vsr).
Se infine glixi sono dati mediante la stessa base, per esempioxi =∑
j bjivj ,il numeroas della (1.15.2) si ottiene cosı:
x1 ∧ · · · ∧ xr =
∑
j1
bj11vj1
∧ · · · ∧
∑
jr
bjrrvjr
=
=∑
j
bj11 · · · bjrr vj1 ∧ · · · ∧ vjr =∑
s
Bsvs1 ∧ · · · ∧ vsr ,
ove l’indice j e “disordinato” mentres e, come prima, ordinato, e oveBs e il
minore delle righe indicizzate das nella matrice le cui colonne sono le
(b1i...
bni
);
percioas = Bs.Forse non e superfluo notare che se la base e ortonormale, la(1.15.2) esprime
il fatto che il quadrato del volume e la somma dei quadrati dei volumi delle proie-zioni dellar-upla data sui sottospazi〈vs1 , . . . , vsr〉; perr = 1 edn = 2 questo eil teorema di Pitagora.
Chiudiamo con un collegamento col calcolo vettoriale “pratico”: nel solitospazio tridimensionale vi e il “prodotto scalare” di due vettori, indicato conv×win Italia e conv · w all’estero (e chiamatodot product in inglese); esso non ealtro che una norma definita positiva (sui reali), e quindi loindicheremo col solitotondino; lo spazio puo essere ora orientato mediante uno dei due orientamenti.Vi e poi il “prodotto vettoriale o esterno”, indicato conv ∧ w in Italia e conv×w all’estero (e chiamatocross productin Inglese), e che ovviamente non e unprodotto esterno nel nostro senso; lo indicheremo conv∧w; che cosa esso sia puoessere ricostruito tenendo presente cheuv∧w deve essere il volume di(u, v, w);si ottiene allora:1.15.3.Esiste un unico isomorfismog di E2 su tuttoV tale che|x, y, z| = x g(y ∧ z); quindi y∧z = g(y ∧ z).Dim. Sappiamo cheE2 ha dimensione3, e che e l’insieme di tutti gliy ∧ z (cfr.Teorema 1.6.4); percio la(x, y ∧ z) 7→ |x, y, z| e un’applicazione bilineare diV × E2 su C. Quindi per ogni scelta diy ∧ z l’applicazione precedente e unelemento di HomC (V,C); ma data la autodualita “” di V , questo elemento diHomC (V,C) sara della formav −, conv ∈ V dipendente day ∧ z. Se questovlo chiamiamo appuntog(y∧z), la g e lineare e soddisfa la|x, y, z| = g(y∧z)x.C.V.D.

Prodotti esterni, norme, spazio affine 27
1.16 Lezione 16
Premettiamo che seV , U sono spazi vettoriali su corpiC, F , e sep : c 7→cp ∈ F e un isomorfismo diC su tuttoF (scritto come esponente anziche comemoltiplicatore a sinistra), un’applicazionep-semilinearedi V suU e unaf : V →U tale chef(v + v′) = fv + fv′ e f(cv) = cpfv per c ∈ C. Sep e l’identitasi ricasca nelle solite lineari. Latrasposizione semilinearee simile alla solita efunziona cosı:
(1.16.1) (v f∗u∗)p = fv u∗.
La f∗ ep−1-semilineareBene; sep e un automorfismo diC (ondeF = C map non e necessariamente
l’identita), un’applicazioneg di V ×V suC che sia lineare nel primo argomento ep-semilineare nel secondo dicesip-sesquilineare(letteralmente, lineare una voltae mezzo). Se essa e nondegenere (solita definizione) la possiamo indicare con(x, y) 7→ xy, ma questa “” non e una autodualita, ma unadualita sesquilineare.Non si puo ovviamente pretendere che essa sia simmetrica; se perop e tale chep−1 = p, ossia chep2 = ι, si puo richiedere che la dualita sesquilineare siahermitiana, ossia tale chey x = (x y)p; se questo accade si ha, come nelcaso simmetrico, che coincidono i due traspostif∗ edf di unf ∈ EndCV dati daf∗x y = x fy, x fy = fx y (infatti: f∗x y = x fy = (fy x)p =
(y fx)p = (fx y)p2 = fx y. Si noti pero che perc ∈ C si ha(cf)∗ = cpf∗;si noti anche che in una hermitiana ilv v appartiene sempre al sottocorpo diCinvarianteperp, ossia formato daic tali checp = c.
Di importanza particolare sono le hermitiane nel caso in cuiC e il corpocomplesso, ep e il coniugio: cp = c = complesso coniugato dic; in tal casov ve sempre nel corpo reale. Non faremo uno studio dettagliatodelle hermitiane, macome collegamento con altre teorie presentiamo un esempio fondamentale che hapero il difetto che lo spazio vettoriale che si costruisce ha dimensione infinita.Dobbiamo premettere ilLemma 1.16.2(di Schwarz). Sianoa1, . . . , an, b1, . . . , bn numeri complessi; al-lora ∣∣∣∣∣
∑
i
aibi
∣∣∣∣∣
2
≤(∑
i
|ai|2)(∑
i
|bi|2).
(Qui il simbolo| | significa valore assoluto).
Dim. Pongasik =(∑
i aibi) ∣∣∑
i aibi∣∣−1
, onde|k| = 1. Perx, y reali si ha:
0 ≤∑
i
|xkai + ybi|2 =∑
i
(xkai + ybi)(xkai + ybi) =
= x2∑
i
|ai|2 + 2xy
∣∣∣∣∣∑
i
aibi
∣∣∣∣∣+ y2∑
i
|bi|2.

28 Capitolo 1
Il secondo membro e una forma quadratica inR[x, y] (R e il corpo reale), ed esemidefinita positiva; quindi, per (1.14.6, e non negativoil determinante della suamatrice ossia il (∑
i
|ai|2)(∑
i
|bi|2)
−∣∣∣∣∣∑
i
aibi
∣∣∣∣∣
2
.
C.V.D.
Naturalmente si sarebbe potuto usare un criterio per le equazioni di secondogrado, che e poi la stessa cosa.
Cio premesso, siaH l’insieme delle successionia = (an)n∈N di numericomplessi, tali che
∑n∈N |an|2 esista (finito), ossia converga. Scriviamoca =
(can)n∈N perc ∈ C (corpo complesso), ea+ b = (an+ bn)n∈N. Questa ha sensose si dimostra che
∑n∈N |an + bn|2 converge; ma
n∑
k=1
|ak + bk|2 =n∑
k=1
(ak + bk)(ak + bk) ≤n∑
k=1
|ai|2 +n∑
k=1
|bi|2 + 2
∣∣∣∣∣n∑
k=1
ak bk
∣∣∣∣∣ ,
che per (1.16.2) e minore o uguale di
n∑
k=1
|ai|2 +n∑
k=1
|bi|2 + 2
((n∑
k=1
|ai|2)(
n∑
k=1
|bi|2))1/2
,
che e tutta roba limitata quandon tende ad infinito.Definiamo infine
a b =∑
n∈Nanbn,
che di nuovo esiste per (1.16.2). QuestoH e ora uno spazio vettoriale suC, didimensione infinita (le(0, . . . , 0, 1, 0, . . . ) ne sono unabase topologica4, e l’ap-plicazione(a, b) 7→ a b e una norma hermitiana suH rispetto al coniugio.QuestoH normato e lospazio di Hilbert. La sua utilita sta in un’altra costruzio-ne che e tipicamente non algebrica e non geometrica, e che tuttavia da un oggettoalgebrico e geometrico. SiaH ′ l’insieme di tuttle le funzioni complessef(x) divariabile reale, definite in un certo intervalloI, e che inI sonoa quadrato som-mabile, e cioe tali che
∫I |f(x)|2dx esiste; qui l’integrazione usata deve essere
quella di Lebesgue, un po’ piu generale di quella di Riemann–Mengoli–Cauchydel programma di II anno. TaleH ′ e in modo ovvio uno spazio vettoriale suC (ovvio se si ammette che la somma di due funzioni a quadrato sommabile sia
4Cio significa che il sottospazio vettoriale diH da esse generato edensoin H ; ovvero cheogni elemento diH e limite di una successione di combinazioni lineari finite di elementi della basetopologica. Il limite si considera rispetto alla distanzad(a, b) = ‖a − b‖ =
√
(a− b) (a− b),che rendeH uno spazio metrico.
Prodotti esterni, norme, spazio affine 29
ancora a quadrato sommabile); se si ponef g =∫I f(x)g(x)dx (che si dimo-
stra esistere), la(f, g) 7→ f g e una forma hermitiana suH ′, il cui nucleo elo spazioH0 delle f(x) nulle quasi ovunque, e cioe tali che
∫I |f(x)|2dx = 0.
Quindi il “” induce una norma hermitiana suH = H ′/H0. QuestoH e lostesso (o meglio, e isomorfo a quello) definito prima: ad unaf basta far cor-rispondere laa = (an)n∈N tale che lean siano le componenti dif rispetto adun sistema ortonormale5. Un tipico sistema ortonormale e quello di Fourier,per esempio, quandoI e l’intervallo (0, 2π); i suoi elementi sono le immaginimod H0, delle fn(x) = 1√
2πexp(nix), pern = 0,±1,±2, . . . ; qui i signifi-
ca (−1)1/2. Alla immagine dig(x) ∈ H ′ in H corrisponde la successione(a0, a1, a−1, a2, a−2, . . . ), ove
an = g fn =
∫ 2π
0g(x)fn(x)dx;
si ha cioe laserie di Fourierg(x) =∑
n anfn(x) mod H0.
1.17 Lezione 17
Uno spazio affinedi dimensionen sul corpoC e la struttura formata da tutti glioggetti seguenti:
1. Un insiemeS non vuoto;2. Uno spazio vettorialeT suC, di dimensionen;3. Un’applicazione(t, P ) 7→ P + t, di T × S su S che gode delle proprieta
seguenti:
a) P + 0 = P ;b) (P + t) + v = P + (t+ v);c) nella relazioneQ = P + t, se due dei tre oggetti,P , Q, t, sono dati arbitra-
riamente, il terzo esiste ed e unico.
Uno spazio affine di dimensione1, o rispettivamente2, dicesiretta affineorispettivamentepiano affine. Si scrive ancheQ − P = t in luogo diQ = P + t;lo spazio vettorialeT e chiamato ilgruppo astratto delle traslazionidello spazioaffine; gli elementi diS sono ipunti dello spazio; inoltre, per brevita, spesso sichiama il soloS “lo spazio affine”, sottintendendoT e l’applicazione. Fissato unP ∈ S, la t 7→ P + t e corrispondenza biunivoca fra tuttoT e tuttoS; pertanto,non appena sia datoT , si puo prendere perS il T stesso, privato della strutturadi spazio vettoriale e dotato della sola struttura di differenza di (punti, ossia di)vettori.
5Ovvero una famiglia numerabile qn | n ∈ N tale cheqn qm = δmn e che il sottospaziovettoriale da essa generato sia denso inH .
30 Capitolo 1
Se(T, S) e (T ′, S′) sono spazi affini sui corpiC, C ′, un’applicazione affinedel primo sul secondo e un’applicazioneg di S suS′ per cui esista un’applicazionep-semilinearef di T su T ′ (con p isomorfismo opportuno diC su C ′), con laproprietag(P + t) = gP + ft; questaf , se esiste, e unica, perche appuntof(P − Q) = gP − gQ. La f e iniettiva (risp. suriettiva) se, e solo se, tale ela g (dimostrarlo). Le applicazioni affini di un(T, S) su tutto se stesso, per lequali laf e lineare, si chiamanoaffinita, e chiaramente formano un gruppo. Unsottospazio affinedi (T, S) e un(T ′, S′), conT ′ sottospazio vettoriale diT edS′
sottoinsieme diS, tale che l’immersione diT ′ in T edS′ in S sia un’applicazioneaffine; seP ′ ∈ S′, S′ consiste di tutti iP ′ + t′ quandot′ percorreT ′6. Siano(T1, S1), (T2, S2) sottospazi affini di(T, S); seS1 ∩ S2 contiene un puntoP , sihaS1 = P + T1, S2 = P + T2, ondeS1 ∩ S2 = P + (T1 ∩ T2); analogamente,se(T3, S3) e il minimo sottospazio affine che contiene i due spazi dati,e S3 =P + (T1 + T2); quindi
(1.17.1) dim(S1 ∩ S2) + dimS3 = dimS1 + dimS2.
Due tali sottospazi (che abbiano cioe un punto in comune) diconsi incidenti; di-consi inveceparalleli se uno dei due spazi vettorialiT1, T2 e sottospazio del’altro;quindi se due sottospazi sono incidenti e paralleli, l’uno sara sottospazio dell’altro;i due sottospazi affini diconsi infinesghembise non sono ne incidenti ne paralleli7
Per spazi non incidenti l’analoga della (1.17.1) e:
(1.17.2) dimC(T1 ∩ T2) + dimS3 = dimS1 + dimS2 + 1;
in quanto dimS3 = dim(T1 + T2) + 1.Un sottospazio di dimensionen − 1 di uno spazio affineS di dimensionen
dicesi uniperpiano affinedi S.Se(T, S) e spazio affine, unriferimento affineconsiste di una base ordinata
(t1, . . . , tn) di T e di un puntoO (la letteraO, da distinguere dallo0 di T ) diS; questo si chiama l’origine del riferimento. Dato un riferimento affine, ognipuntoP ∈ S e univocamente individuato dalle suecoordinate affinio cartesianex1, . . . , xn, che sono gli elementi diC tali cheP = O +
∑i xiti; quandon = 1,
l’unica x si chiama anchecoordinata ascissa; quandon = 2, lex1, x2, in qualcheordine prestabilito, si chiamano anche, rispettivamente,l’ ascissae l’ordinata. Perdare un riferimento affine si puo dare, anzicheO e le ti, l’insieme ordinato delleretteRi = O + 〈ti〉 ed il puntoU = O +
∑i ti, dettopunto unita. In tal caso
6Anche l’insieme vuoto∅ si considera un sottospazio affine (di dimensione−1)7Le definizioni in questo ambito differiscono tra i vari autori. Ad esempio, [B] Marcel Berger,
Geometry, Springer 1987 (2 voll), non da alcuna definizione in proposito e si limita a parlare disottospazi affini che si intersecano o sono “paralleli” (quando coincidono i sottospazi direttori) o“debolmente paralleli” (quando sono paralleli secondo la definizione data qui) e non da nomencla-tura per le altre possibili situazioni. Per altri autori, ledefinizioni di incidenti e paralleli coincidonocon le presenti, ma i sottospazi sghembi sono quelli per cuiS1 ∩ S2 = ∅ e T1 ∩ T2 = 〈0〉(e quindi sono sghembe –cioe con intersezione vuota– le loro chiusure nello spazio proiettivo).Personalmente, preferisco quest’ultima definizione a quella data qui da Barsotti.

Prodotti esterni, norme, spazio affine 31
O si ritrova come intersezione delleRi (che hanno l’unico dovere di intersecarsiin un punto e di non stare su uno stesso iperpiano), mentreti, o meglioO + tie l’intersezione diRi con l’iperpiano passante perU e parallelo all’iperpianoHi
delleRj conj 6= i; quindiU ha l’unico dovere di non stare su nessuno degliHi;questi sono gliiperpiani coordinati, mentre leRi sono gliassi coordinati.
Sia(x1, . . . , xn) un sistema di coordinate cartesiane suS, legate ad un riferi-mento affine(O, t1, . . . , tn); un iperpianoH di S sara costituito dai puntiQ+V ,oveQ e un punto fissato diH e V e sottospazio vettoriale diT di dimensionen − 1; seq1, . . . , qn sono le coordinate diQ, e se
∑i ait
∗i e una base diV ⊥ (nel
dualeT ∗ di T ), si ha che un puntoP , di coordinatex1, . . . , xn, e suH se, e solose,P −Q ∈ V , ossia se, e solo se,
∑i ai(xi − qi) = 0, e infine, se, e solo se,
(1.17.3)n∑
i=1
aixi = b (b =∑
i aiqi).
La (1.17.3), unica a meno di un fattore moltiplicativo non nullo in C, e l’equazionedi H nel sistema(x1, . . . , xn); e ogni tale relazione, con leai non tutte nulle, el’equazione di un iperpiano; gli iperpianiH, H ′ sono paralleli se, e solo se, leaidell’uno sono proporzionali a quelle dell’altro. Dato che ogni sottospazio affine diS, di dimensionem, e intersezione din−m iperpiani (cfr. 1.17.1), si comprendeche cosa siano le “equazioni di un sottospazio”.
Unametricasu uno spazio affine(T, S) (che diviene allora unospazio affinemetrico) e una norma suT ; se “” e tale norma, ilquadrato della distanzafra PeQ (punti siS) e |P − Q|2 = (P − Q) (P − Q) (cfr. lez. 15); analogamenteper i quadrati dei volumi. Si noti che laP − Q 7→ |P − Q|2, perQ fisso, euna forma quadratica suT 8, la quale, seC non ha caratteristica2, corrispondeproprio alla forma bilineare “”; quindi la metrica suS, ossia la norma suT , edeterminata non appena sia data l’applicazione sopra descritta, come e giusto chesia per poterla chiamare “metrica”.
Seti tj = aij, e sex, y sono le coordinate diP,Q, avremo
(1.17.4) |P −Q|2 =∑
1≤i,j≤n
aij(xi − yi)(xj − yj);
e se la base e ortogonale:
(1.17.5) |P −Q|2 =n∑
i=1
aii(xi − yi)2;
e se e ortonormale:
(1.17.6) |P −Q|2 =n∑
i=1
(xi − yi)2.
8Per essere pignoli, sarebbet 7→ |(Q+ t)−Q|2, al variare dit ∈ T .

32 Capitolo 1
Allo spazio affine si trasferisce, con cautela, la nomenclatura diT : i sottospaziP + T1, Q + T2 sonoortogonali se i due spaziT1, T⊥
2 sono l’uno sottospaziodell’altro (non importa quale di quale), nel qual caso lo stesso vale perT2 eT⊥
1 .SeC e ordinato, se ogni elemento positivo diC e un quadrato, e se la metrica(ossia la norma) e definita positiva, la radice quadrata nonnegativa di|P −Q|2 ela distanzafraP eQ; con essa lo spazio affine metrico diviene uno spazio metriconel senso della topologia, chiamatospazio euclideo(e metrica euclidea).
SeC e ordinato, ovvero seC non ha caratteristica2 eT ha basi ortonormali,un orientamentoL di T si chiama un orientamento di(T, S), e questo si chiamaunospazio affine orientato(nel secondo caso sara anche metrico).
1.18 Lezione 18
Passiamo a trattare delle affinita di(T, S); si e visto che sono le applicazionibiunivocheg di S su tuttoS per le quali esiste una (unica)f ∈ EndCT tale chegP = gO+ f(P −O). Questef sono elementi invertibili di EndCT ; il gruppo ditali elementi, dettogruppo linearedi dimensionen suC sara indicato con GL(T )o con GLn(C)9;
Il gruppo delle affinita sara indicato con AffT o con Affn(C). L’affinita gsopra descritta e univocamente determinata col daref e gO, quandoO sia statofissato; segO −O = t, si ha
(1.18.1) gP = O + t+ f(P −O);
inoltre laf ∈ GL(T ) ed il t ∈ T possono essere dati ad arbitrio. Si sono cosı iden-tificati gli elementig di Aff T con le coppie(f, t), ma la identificazione dipendedalla scelta diO; a rigore, si dovrebbe scrivereg = (f, t)O, e lasciamo al lettoreverificare che(f, t)Q = (f, t+(Q−O)− f(Q−O))O; Nel seguitoO sara fisso,e sara omesso come indice di(f, t). Il (1.18.1) da la legge di composizione10 diqueste coppie:
(f, t)(f ′, t′)P = (f, t)(O + t′ + f ′(P −O)
)=
= O + t+ f(t′ + f ′(P −O)) = O + t+ ft′ + ff ′(P −O),
onde
(1.18.2) (f, t)(f ′, t′) = (ff ′, t+ ft′).
Da qui seguono varie conseguenze:
9La notazione qui usata e ormai (quasi) universalmente diffusa e quindi la troviamo preferibilealla notazione “Lin” e “Lin(C, n)” utilizzata da Barsotti, che aggiunge “questa notazione, comealtre analoghe che seguiranno, e mnemonica e ad hoc per questi appunti; non e standard e non eusata nella letteratura”.
10Quanto segue si potrebbe riassumere dicendo che “la scelta di O definisce un isomorfismo traAff T ed il prodotto semidirettoT ⋊ GL(T ).”

Prodotti esterni, norme, spazio affine 33
1. Il gruppo AffT contiene il sottogruppo formato dalle(f, 0) che sara detto ilgruppo delleaffinita centrali di centroO e isomorfo a GL(T ); i suoi elementisono queig ∈ Aff T per i qualiO e punto unito, ossia tale chegO = O.L’immagine del gruppo GL(T ) in Aff T , pur essendo sempre isomorfa a GL(T ),dipende chiaramente dalla scelta diO.
2. Il gruppo AffT contiene il sottogruppo formato dalle(ιT , t), detto delletrasla-zioni (e si tralascia l’aggettivo “astratte” usato perT ); tale gruppo e isomorfioaT ed ogni suo elemento, eccetto l’identita (t = 0) e privo di punti uniti. Que-sto sottogruppo e indipendente dalla scelta diO, perche i suoi elementi sono leapplicazioniP 7→ P + t, pert ∈ T .
3. L’applicazionep : (f, t) 7→ f da origine alla sequenza esatta di gruppi
0 → Tj // Aff T
p // GL(T ) → 1
per cuiT e isomorfo al nucleo dip e GL(T ) ∼= Aff T/T .
Se lo spazio affine e anche metrico, le affinitag per le qualif e trasformazio-ne ortogonale si chiamanocongruenzeo movimenti rigidi; l’(1.11.4) e l’(1.18.1),mostrano che seC non ha caratteristica2 la g e congruenza se, e solo se,|gP −gO|2 = |P −O|2 per un datoO e per ogniP , ossia se, e solo se, conserva i qua-drati delle distanze. Tutte le traslazioni sono congruenze, mentre sono congruenzesolo gli elementi di GL(T ) che corrispondono a trasformazioni ortogonali; questielementi diconsirotazioni di centroO. Le traslazioni conservano l’orientamento(se c’e), mentre le affinita centrali, e in particolare le rotazioni, sonodirettese loconservano (a determinante positivo, oppure unimodulari), e inversealtrimenti.Lo scrivere(f, t) = (1, t)(f, 0) = (f, 0)(1, f−1t) (cfr. 1.18.2) comporta che:Teorema 1.18.3.Ogni movimento rigidog di uno spazio affine metricoe ottenibilemediante una traslazione seguita da una rotazione di centroO preassegnato; odanche in ordine inverso. La rotazionee univocamente determinata dag (ed anzil’elemento diGL(T ) che le corrisponde non dipende dalla scelta diO), mentre latraslazione dipende daO.
Chiudiamo coll’esprimere tutto in matrici:usiamo inS il riferimento (O, t1, . . . , tn); i punti verranno identificati con le ma-
trici X =
1—x1
...xn
, xi ∈ C; gli elementi di GL(T ) con matrici in GLn(C) (n× n
ed invertibili ad elementi inC), e gli elementi diT con matricin× 1. Se alloraF
e la matricen× n di f (legata alla baset1, . . . , tn) eda =
( a1...an
)e il vettoret
(ondea1, . . . , an sono le coordinate cartesiane diO + t), dico che(f, t) ∈ Aff Tpuo essere rappresentato dalla matrice (a blocchi)
(1.18.4) B =
(1 0a F
),

34 Capitolo 1
nel senso che se(f, t)X = Y , allora
(1.18.5) Y = BX;
provare per credere! Nel capitolo sullo spazio proiettivo si vedra il vero motivo diquell’1 che sta in cima alleX, Y .
Naturalmente, al solito, la (1.18.5) puo essere interpretata, anziche come unaaffinita, come formula di trasformazione di coordinate: sesi ha un nuovo sistemadi riferimento (O′, t′1, . . . , t
′n) nel quale la nuova origine,O′, ha come vecchie
coordinate−a1, . . . ,−an, e per le quali la nuova baset′1, . . . , t′n di T e lega-ta alla vecchia mediante leti =
∑j fjit
′j (ove (fji)1≤j,i≤n = F ), allora nella
(1.18.5) se lexi sono le vecchie coordinate di un punto, leyi ne sono le nuove.
2Spazi proiettivi
2.19 Lezione 19
Lo spazio affine, costruito nella lezione 17, ha alcune peculiarita che lo rendo-no un po’ scabroso da trattare, nel senso che bisogna sempre fare una casisticaminuziosa. Per esempio, seS e affine di dimensione2, e si vuole trovare l’in-tersezione tra rette (non coincidenti)ax + by = c, eda′x + b′y = c′, occorretrovare la soluzione dei sistema delle due equazioni; ora, se il determinante
∣∣ a ba′ b′
∣∣e non nullo, ossia quasi sempre, la soluzione c’e e le rettesono incidenti, men-tre se e nullo non c’e e le rette sono parallele; una discussione o dimostrazioneche dipendesse dalla soluzione di quel sistema dovrebbe essere divisa in due partiseparate. Anche topologicamente (se si opera sui reali) lo spazio affine mancadi certe proprieta simpatiche: per esempio non e compatto: gli intervalli aper-ti . . . , (0, 2), (1, 3), (2, 4), (3, 5), . . . ne sono un ricoprimento con aperti che noncontiene nessun ricoprimento finito. Ma torniamo alla faccenda delle parallele, etanto per non ripeterci troppo usiamo il simboloAn in luogo della frase “spazioaffine di dimensionen”. Se prendiamo due sottospaziHr, Hs (r eds sono le ri-spettive dimensioni) di unAn, conr+ s ≥ n, dati per esempio daHr = P +Wr,Hs = Q+Ws (conWr, Ws sottospazi delT delle traslazioni diAn), le (1.17.1),(1.17.2) dicono che essi si intersecano, salvo il caso di sottospazi paralleli1 Il pa-rallelismo appare quindi come una vera e propria eccezione,ed in matematica leeccezioni si tenta sempre di eliminarle. Siccome qui quelloche manca e un “puntod’incontro”, il modo piu semplice per trarsi d’impaccio equello di inventare nuovipunti, la cui specialita sia di stare su coppie di spazi paralleli. Il modo che si pre-senta spontaneo e il chiamare “punto improprio” diAn ognidirezioneintendendocon cio l’insieme di tutte le rette parallele ad una data (rette affini, si intende);un sottospazioHr “contiene” un certo punto improprio se contiene qualcuna diquelle rette parallele (i soliti punti saranno chiamati “propri”). Se si fa questo si
1Come, ad esempio, si ha inA5 con il riferimento(O, e1, . . . , e5), considerando i sottospaziH3 = O + 〈e1, e2, e3〉 eK3 = O + e5 + 〈e2, e3, e4〉, ove chiaramente eH3 ∩K3 = ∅. Qui si emodificato il testo originale che contiene un’imprecisionee dice “salvo il caso in cui uno deiWr,Ws e sottospazio dell’altro, ossia salvo il caso di parallelismo”.
36 Capitolo 2
vede che gliHr, Hs sopradescritti s’incontrano sempre, e sono paralleli se, eso-lo se, la loro intersezione e tutta formata da punti impropri. Il discorso potrebbeessere continuato cosı (e cosı e nato storicamente), ma non rimedierebbe al guaiodi dover sempre considerare una casistica, in quanti i puntiimpropri e quelli pro-pri dovrebbero essere trattati diversamente. Daremo quindi una definizione chesembra molto diversa, e faremo poi vedere che si tratta dellastessa cosa.
Chiameremospazio proiettivosuC (corpo), di dimensionen ≥ −1, e indi-cheremo con(Sn, σ), l’ente costituito dai seguenti oggetti:
1. L’insieme[Vn+1] di tutti i sottospazi vettoriali di uno spazio vettorialeVn+1 suC (l’indice denota la dimensione come sempre nel seguito);
2. Un’applicazione biunivocaσ di [Vn+1] su tutto un insiemeSn = σ[Vn+1].
Al solito, per “elementi” dello spazio proiettivo si intenderanno gli elementi diSn,cosicche si dira generalmente “siaSn uno spazio proiettivo”, sottintendendo ilσ;ed anzi, talvolta si prendera semplicementeSn = [Vn+1] e σ = ι (applicazioneidentica). Ma per non cadere in certe trappole occorre, almeno finche non si hapratica con l’argomento, tenere ben distintoSn da[Vn+1].
Dato unSn, i σVm+1, conVm+1 sottospazi vettoriali di dimensionem + 1di Vn+1, sono glielementi di dimensionem di Sn; gli elementi di dimensioni−1, 0, 1, 2, n − 1, n si chiamano rispettivamente ilvuoto, i punti, le rette, i piani,gli iperpiani, il sostegnodi Sn; due elementiσVi, σVj si appartengonose unodei due spaziVi, Vj e sottospazio dell’altro. A loro volta, gliS−1, S0, S1, S2,si chiamano ilvuoto proiettivo, il punto proiettivo, la retta proiettiva, il pianoproiettivo. Notare che il vuoto proiettivo e privo di punti, ma non e l’insiemevuoto perche contieneσ 〈0〉.
Si notera subito una stranezza: l’Sn non e, come tutti gli spazi dabbene,l’insieme dei propri punti, ma e l’insieme del vuoto, dei punti, delle rette, deipiani, . . . , degli iperpiani, e del sostegno. Tuttavia l’insieme dei punti di Sn esiste,e si chiama lospazio proiettivo punteggiatoo di punti, legato adSn; quindi c’e ilvuoto punteggiato, che e l’insieme vuoto, ilpunto punteggiato(di cardinalita1),la retta punteggiata, il piano punteggiato.
2.20 Lezione 202 SeAr = σUr+1, Bs = σWs+1 sono elementi diSn, scriveremoAr < Bs seUr+1 ⊂ Ws+1, ossia seAr eBs si appartengono edr < s; porremoAr ∩ Bs =σ(Ur+1 ∩Ws+1) = [elemento di dimensione massima fra quelli che sono≤ Ar e≤ Bs]; porremo ancheAr + Bs = σ(Ur+1 +Ws+1) = [elemento di dimensioneminima fra quelli che sono≥ Ar e ≥ Bs]. SeAr ∩ Bs = vuoto, Ar e Bs
sonosghembi(altrimenti sonoincidenti); se inoltreAr +Bs = sostSn, essi sonocomplementari.
2In realta nel testo non compare l’inizio della lezione 20, ma compare nella numerazione delleformule; percio ne abbiamo posto (arbitrariamente) l’inizio in questo punto

Spazi proiettivi 37
Dato unAr, esso definisce subito due spazi proiettivi: l’uno e quelloche haAr come sostegno, e che quindi e formato di tutti gli elementi di Sn che sono≤ Ar; consiste deiσV quandoV ⊆ Ur+1, ed e quindi ilσ[Ur+1], di dimensioner; e detto ilsottospaziodi Sn di sostegnoAr, e vedremo in seguito che e veramen-te un sottospazio. L’altro spazio proiettivo definito daAr e quello che haAr comevuoto, che e quindi formato da tutti gli elementi diSn che sono≥ Ar; consiste deiσV quandoV ⊇ Ur+1, ma questo non mostra che sia spazio proiettivo; per since-rarcene, poniamoV ′
n−r = Vn+1/Ur+1, chiamiamoh l’omomorfismo naturale diVn+1 suV ′
n−r, e definiamo unσ′ di [V ′n−r] suSn cosı:
(2.20.1) σ′Z = σh−1Z.
Allora lo spazio descritto eσ′[V ′n−r] ed ha quindi dimensionen−r−1; si chiama
stella di centroAr (fasciose ha dimensione1) in Sn. Notiamo subito che l’essere“sottospazio di” o “stella in” non e una particolarita di questi spazi, ma solo unarelazione speciale col datoSn.
Altra cosa: siaV ∗n+1 il duale diVn+1, e definiamo unσ∗ di [V ∗
n+1] suSn cosiı:
(2.20.2) σ∗Z = σZ⊥.
Ora(Sn, σ∗) e uno spazio proiettivo che ha lo stesso insiemeSn di (Sn, σ); sara
indicato con(S∗n, σ
∗) o brevementeS∗n, e chiamato ilduale. SeA e elemento di
Sn o S∗n indifferentemente, e se la dimensione diA come elemento diSn e m,
quella come elemento diS∗n en −m− 1; seB e un altro elemento, e seA < B
in Sn, saraA > B in S∗n; l’elementoA ∩ B in Sn e l’elementoA + B in S∗
n;l’elementoA+B di Sn e l’elementoA+B in S∗
n. E S∗∗n = Sn; il vuoto di Sn e
il sostegno diS∗n; i punti di S∗
n sono gli iperpiani diSn, ecc.. L’insieme dei puntidi S∗
n, e quindi degli iperpiani diSn, e lospazio di iperpiani legato adSn (pianorigato sen = 2, spazio di pianisen = 3). Se infineA e elemento diSn, e seA1, A2 sono rispettivamente il sottospazio diSn di sostegnoA, e la stella diSn
di centroA, alloraA∗1, A
∗2 sono rispettivamente la stella diS∗
n di centroA ed ilsottospazio diS∗
n di sostegnoA. A questo punto si puo enunciare il
Teorema 2.20.3(di dualita proiettivo). Ogni asserto riguardante gli elementi diun Sn e le loro proprieta di appartenenza resta vero quando ogni elemento didimensionei viene sostituito con uno di dimensionen − i − 1; in particolare,“punti” con “iperpiani”.
Il (2.20.3) e vago nell’enunciato; per renderlo preciso cisi dovrebbe impego-lare nella logica formale; ecco un esempio di cio che vuol dire e di cio che nonvuol dire: l’asserto “il pianoH si appartiene coi puntiP , Q” non e dualizzabileperche non ci sono i “duali” diH, P , Q. Invece l’asserto “se tre piani diS3 non siappartengono con una stessa retta essi si appartengono con esattamente un punto”(in parole povere: se tre piani non hanno in comune una retta s’incontrano in unpunto) ha il seguente duale: “se tre punti diS3 non si appartengono con una stessaretta, essi si appartengono con esattamente un piano” (in parole povere: tre puntinon allineati determinano un piano).

38 Capitolo 2
2.21 Lezione 21
Siano (Sn, σ), (S′m, σ′) spazi proiettivi sui corpiC, C ′, con sostegniσVn+1,
σ′V ′m+1, e siafS un’applicazione diSn suS′
m; la fS e un’applicazione proiettivase esiste un’applicazionep-semilinearefV di Vn+1 suV ′
m+1 (conp isomorfismoopportuno diC su tuttoC ′) tale che
(2.21.1) fSσVi+1 = σ′fV Vi+1 per ogniVi+1 ⊆ Vn+1.
Si ha:
Lemma 2.21.2.SiagV una applicazioneq-semilineare diVn+1 suV ′m+1 tale che
la (2.21.1) sia soddisfatta dopo la sostituzione difV con gV . Allora imgV =imfV e kergV = kerfV ; se inoltrefV ha rango> 1, si hap = q, ed esiste una ∈ C ′ non nullo tale chegV v = afV v per ogniv ∈ Vn+1.
Dim. Sia Ur = kerfV , e pongasiVn+1 = Ur ⊕ Wn−r+1; sia w0, . . . , wn−r
base diW , e pongasiw =∑
iwi. Da σ′ 〈fVwi〉 = fSσ 〈wi〉 = σ′ 〈gV wi〉, siha 〈fV wi〉 = 〈gV wi〉, ondegV wi = aifV wi, con0 6= ai ∈ C ′; analogamente,gV w = afVw. Ma gV w =
∑i gV wi =
∑i aifV wi, mentreafV w =
∑i afVwi.
Quindiai = a per ognii. Se poiu ∈ Ur si haσ′ 〈gV u〉 = fSσ 〈u〉 = σ′ 〈fV u〉 =σ′ 〈0〉, ondegV u = 0, u ∈ kerg; con ragionamento reciproco si ottiene chekergV = kerfV ; il discorso di prima da poi che un elemento
∑i xigV wi di imgV
(conxi ∈ C ′) si puo scrivere come∑
i(axi)fVwi ∈ imfV ; pertantoimfV =imgV .
Se imfV ha dimensione almeno2, pongasiz = w0 + xw1, con x ∈ C.Allora, al solito, gV z = bfV z per unb ∈ C ′; ma gV z = gV w0 + xqgV w1 =a(fVw0+xqfVw1), mentrebfV z = b(fV w0+xpfVw1). Quindia = b exq = xp.Ora e chiaro chegV
∑i xiwi =
∑i x
pi afVwi = afV
∑i xiwi. C.V.D.
Il Lemma 2.21.2 dice che lafV (dettasoprastantealla fS) e essenzialmenteunica; la sua dimostrazione prova che:
Lemma 2.21.3.Una applicazionefS di Sn suS′m e proiettiva ed ha applicazione
soprastantefV se, e solo se,
1. fSσ 〈v〉 = σ′ 〈fV v〉 per ogniv ∈ Vn+1, o equivalentementefSP = σ′fV σ−1Pper ogni puntoP di Sn;
2. Se un elemento ed un punto diSn si appartengono, anche le lorofS-immaginisi appartengono.
Casi particolari di applicazioni proiettive:
1. kerfV = 〈0〉, ossiafV e iniettiva; accade se, e solo se,Sn non ha punti la cuiimmagine e il vuoto diS′
m; la fS dicesiiniettiva; e biunivoca traSn edimfS , econserva la dimensione.
2. Sn e sottoinsieme diS′m ed fS e l’applicazione identica e manda i punti su
punti; per1 la fS e iniettiva e si chiama l’immersionedi Sn in S′m; l’Sn e detto
sottospazio proiettivodi S′m.

Spazi proiettivi 39
3. fV e biiettiva, ossia iniettiva su tuttoV ′m+1; accade se, e solo se,fS induce
una biiettiva tra spazi punteggiati; allorafS e biiettiva fraSn edS′m nel solito
senso, e conserva la dimensione; viene dettacollineazione, ed ancheproiettivitaquando lafV sopastante e, o puo essere scelta, lineare.
4. PostoUr = kerfV , fV e l’omomorfismo naturale diVn+1 su tuttoV ′m+1 =
Vn+1/Ur, onder+m = n. Per ogni elementoZ di [Vn+1], l’elementofV Z di[V ′
m+1] e l’insieme dei vettoriv + Ur per i qualiv puo esser scelto inZ; questisono in corrispondenza biunivoca con gliZ+Ur, e richiederemo ulteriormentecheσ′ sia definita daσ′fV Z = σ(Z + Ur), come nella (2.20.1). Con cio ilLemma 2.21.2 comporta chefSσZ = σ(Z + Ur) = σZ + σUr. La fS cosıcostruita si dira laproiezione diSn di centroσUr oppureda σUr; proiettareσZ da σUr vuol dire appunto costruirefSσZ; e questo oggetto si chiama laproiezionedi σZ daσUr. Lo spazioS′
m = S′n−r cosı costruito non e altro che
la stella inSn di centroσUr; il Tr−1 = σ[Ur] e un sottospazio proiettivo diSn,detto il nucleodi fS, e indicato conkerfS; e l’insieme di tutti gli elementi diSn la cuifS-immagine e il vuoto diS′
m; l’S′m e anche indicato conSn+1/Tr−1.
5. Caso generale. Sappiamo che lafV puo essere cosı decomposta:
Vn+1 suriezione
// Vn+1/kerfVbiiezione
// imfV immersione
// V ′m+1 ;
corrispondentemente,fS si spezza cosı:
Sn proiezione
// Sn/kerfScollineazione
// imfS immersione
// S′m .
Dati Sn edS′m, una applicazione proiettivafS di Sn suS′
m, con la sopra-stantefV , ha naturalmente latraspostaf∗, di S′
m suS∗n, con la soprastantef∗
V(tenere presente la (1.16.1) per la trasposizione semilineare); in particolare, sefS e immersione,f∗
S e proiezione di centro il sostegno diSn, mentre sefS eproiezione di centroA, f∗
S e l’immersione siS′m∗ in S∗
n. Se perofS e collineazio-ne, laf∗
S puo anche essere interpretata come collineazione diS′m suSn cosı: da
f∗Sσ
∗V = σ∗f∗V V per (2.21.2) si ottienef∗
Sσ′V ⊥ = σ(f∗
V V )⊥ per (2.20.2); ma(f∗
V V )⊥ = f−1V V ⊥, ondef∗
Sσ′V ⊥ = σf−1
V V ⊥, che mostra che
2.21.4.SefS e collineazione diSn suS′n, allora f∗
S, come applicazione diS′n su
Sn, coincide conf−1S .
Intendiamoci bene: laf∗S e sempre applicazione diS′
m∗ = S′
m (come insiemi)suS∗
n = Sn; il guaio e che sefS non e collineazione, quell’applicazione non eproiettiva.
2.22 Lezione 22
Una applicazione proiettiva diSn suS′m∗ si chiama unareciprocita di Sn suS′
m;unaautoreciprocita e una reciprocita diSn in se che sia una proiettivita diSn

40 Capitolo 2
suS∗n. Per dare una autoreciprocita basta dare l’fV soprastante, che e un’appli-
cazione lineare non degenere diVn+1 su V ∗n+1; ed ormai sappiamo che un tale
oggetto identificaVn+1 con V ∗n+1, cosicche la dualita preesistente fra questi di-
viene un’autodualita. Si e visto nella prima parte che fraqueste sono importantile norme e le alternanti non degeneri. L’unicita essenziale di fV (2.21.3) ci dal’unicita essenziale della autodualita soprastante ad una autoreciprocita; ed allorale autoreciprocita provenienti da norme che non siano anche alternanti (questo vadetto per la caratteristica2) si chiamanopolarita, mentre quelle provenienti daalternanti si chiamanosistemi nulli.Teorema 2.22.1.Una autoreciprocita fS : Sn → S∗
n e una polarita o un sistemanullo se, e solo se,e vero l’asserto seguente: ogniqualvoltaP , Q sono punti diSn
tali cheQ si appartenga confSP , allora P si appartiene confSQ. La fS e poipolarita (risp. sistema nullo) se esiste (risp. non esiste) qualchepuntoP di Sn
che non si appartenga confSP .Dim. La autodualita “” di Vn+1 e definita dav v′ = v fV v
′; dire cheσ 〈v〉si appartiene confSσ 〈w〉 = σ∗ 〈fV w〉 = σ 〈fV w〉⊥ e equivalente a dire chev fV w = 0, ossia chev w = 0. L’altro asserto vuole invece direw v = 0;questo e conseguenza del primo (ossia e vero per tutti iv,w per i quali e vero ilprimo) se, e solo se, la autodualita soddisfa lav w = ±w v (dimostrarlo!). Sevale il + o se la caratteristica e2 si ha una norma; se vale il− e la caratteristicanon e2 si ha l’alternanza. Poi,σ 〈v〉 si appartiene confSσ 〈v〉 se, e solo se,v v = 0; questo e vero per ogniv se, e solo se, il tondino e alternente (e ladefinizione dell’alternanza). C.V.D.
C’e un’ultima operazione da introdurre, che si riattacca aquanto detto subitoprima e subito dopo del (2.21.4). Una specialita degli spazi vettoriali, e quindi de-gli spazi proiettivi, e che ogni sottospazio ha dei complementari; Questo permettedi dare degli isomorfismi canonici fra sottospazi e immagini: siaV spazio vetto-riale, e ne sianoU , U ′ sottospazi complementari, cosiccheV = U ⊕ U ′; postoV ′ = V/U , siafV l’omomorfismo naturale diV suV ′; questofV induce un iso-morfismogV di V ′ su tuttoU ′ mediante lagV (fV v) = pr2v; talegV e ovviamenteil reciproco della restrizione difV adU ′. Trasferiamo tutto agli spazi proiettiviS = σ[V ], T = σ[U ], T ′ = σ[U ′], eS′ = S/T = (stella inS di centrosostT ) =σ′[V ′] col σ′ del (2.20.1). I sostegni diT eT ′ sono complementari inS, e l’fS diS suS′ (la proiezione dasostT ) induce una proiettivitagS di S′ su tuttoT ′, che eil reciproco della restrizione difS aT ′. Questa restrizione fa corrispondere ad unA ∈ T ′ l’elementoA+ sostT di S, e si noti cheA esostT sono sghembi; quindigS fa corrispondereA adA + sostT ; maA = (A + sostT ) ∩ sostT ′ (percheZ = (U ⊕Z)∩U ′ seZ e sottospazio diU ′). Questa proiettivitagS della stellaS′
sul sottospazioT ′ che, ripeto, consiste inB 7→ B∩ (sostT ′), si chiamasezione diS′ consostT ′ in S; perB ∈ S′ il B ∩ sostT ′ si chiama di nuovo lasezione diBconsostT ′ in S, ed il verbo che si usa per “fare una sezione” esegareo secare. Ebene avvertire che poi in pratica si segano gli elementi diS′ anche con deisostT ′
che, anziche essere complementari, contengono dei complementari (contengononel senso di>) di sostT ; con cio si ottiene una proiettivita della stellaS′ non sututto T ′, ma suimgV , che e la stella inT ′ di centro(sostT ) ∩ (sostT ′); questo

Spazi proiettivi 41
non e che il terzo teorema di omomorfismo degli spazi vettoriali trasportato aiproiettivi:
(2.22.2)T + T ′
T=
T ′
T ∩ T ′ ;
in questa formula si sono trasferiti, per comodita, i simboli + e∩ dagli elementi diS ai sottospazi dei quali quegli elementi sono i sostegni; ci sentiremo autorizzatia farlo anche in seguito, e quindi notiamo subito che:gli elementi diT + T ′ sonogli A + A′, conA, A′ elementi diT , T ′ rispettivamente; gli elementi diT ∩ T ′
sono gliA ∩A′.Tutto cio che si puo costruire su uno spazio vettoriale ha naturalmente la sua
interpretazione proiettiva; una delle cose che conosciamoe l’algebra esterna, omeglio i suoi elementi omogeneiE0 = C, E1 = V , E2, . . . , En, En+1 (il V sarasupposto di dimensionen+ 1). Osserviamo che un sottospazioU di dimensionem+1 di V e determinato da una sua basex0, . . . , xm; ed il Teorema 1.5.2 insiemecon la multilinearita e l’alternanza del prodotto esterno(1.4.3) mostrano che lacorrispondenzaU 7→ 〈x0 ∧ · · · ∧ xm〉 e biunivoca, ossia che l’elemento a destradipende unicamente daU e non dalla base scelta. Si puo quindi asserire che glielementi dello spazio proiettivoSn = σ[V ] sono iσ 〈h〉, ove h percorre tuttigli elementi diE =
⊕iEi che sono prodotti esterni di vettori diV ; il numero
di fattori esterni da la dimensione. Qui si e naturalmentestipulato di scrivereσ 〈x0 ∧ · · · ∧ xm〉 = σU , e si e anche stipulato che0 sia l’unico elemento diCche e prodotto esterno di vettori diV . Si noti che, per (1.5.2),
2.22.3.Gli elementiσ 〈h〉, σ 〈k〉 di Sn sono incidenti se, e solo se,h ∧ k = 0.
Nella dimostrazione del Teorema 1.6.4 si e visto che, fissato une ∈ En+1 nonnullo, l’applicazione(h, k) 7→ c ∈ C, ovec e dato dah ∧ k = ce, e una dualitatraEm+1 edEn−m, dualita che indicheremo con “”; si puo percio prendereEn
come dualeV ∗ di V , ed ecco cheS∗n e legato adE∗ comeSn lo e adE. L’(1.6.4)
stesso ci conferma che ogni elemento diEn e legato ad un iperpiano diSn, mentregli elementi diEi, quando1 < i < n, non sono tutti legati ad elementi diSn.
2.23 Lezione 23
Si era promesso di mostrare che gli spazi proiettivi ora costruiti sono dei “com-pletamenti” di spazi affini, ed e giunto il momento di mantenere la promessa.Partiamo dallo spazio proiettivo(S, σ), di dimensionen ≥ 0; una proiettivitafS di S in se e unaomologiase esiste un iperpianoZ di S tale chefS inducala proiettivita identica sul sottospazio proiettivo diS che haZ per sostegno; per(2.21.3), e quanto dire che ogni punto che si appartiene conZ deve essere unitoperfS .Lemma 2.23.1.SefS e omologia, taleef∗
S.
Dim. UsiamoV = σ−1sostS, edU = σ−1Z, cosicche, per (2.21.2) e (2.21.3),la fV soprastantefS puo essere scelta in modo da indurre l’identita inU . Sia

42 Capitolo 2
v0, . . . , vn base diV , conv1, . . . , vn base diU : fV vi = vi per i > 0; presala base dualev∗i di V ∗, cerchiamo delleai ∈ C tali che, postov′i = v∗i + aiv
∗0
(i = 1, . . . , n), si abbiaf∗V v
′i = v′i (se le troviamo il teorema e dimostrato). Ora,
in effetti evj f∗V v
′i = fV vjv∗i +aifV vj v∗0 , e noi vogliamo che questa, per ogni
j, coincida convj v∗i +aivj v∗0 . Perj > 0 l’identita richiesta e automaticamenteverificata perchefV vj = vj; perj = 0 essa si riduce afV v0 v∗i +aifV v0 v∗0 =ai, dalla quale si possono ricavare leai sefV v0 v∗0 6= 1. Se invece questo e= 1, cio significa chefV v0 = v0 + (elemento diU); in tal caso questo elementodi U puo essere preso fra iv1, . . . , vn, per esempiov1: fV v0 = v0 + v1 (sequell’elemento fosse0, fV sarebbe l’identita ed il risultato sarebbe ovvio). Ora siha, peri 6= 1, vj f∗
V v∗i = fV vj v∗i = vj v∗i ; cio mostra che lev∗0 , v
∗2 , . . . , v
∗n
hanno ancora la proprietaf∗V v
∗i = v∗i . Si e cosı visto chef∗
S e omologia. C.V.D.
Il significato del Lemma 2.23.1, alla luce del (2.21.4), e ilseguente: sefSe omologia, non solo c’e un iperpiano che e sostegno di un sottospazio su cuifS induce l’identita; ma c’e anche un punto che e centro di una stella su cuifSinduce l’identita. Ed anzi, per la simmetria del (2.23.1),quest’ultima proprietacaratterizza da sola le omologie. L’iperpiano ed il punto sichiamano l’asseedil centro di omologia, e l’omologia especialese asse e centro si appartengono;ma l’omologia identica e considerata sia speciale che non speciale. Nella dimo-strazione del Lemma 2.23.1 l’asse difS eZ = σU ; il centro e l’asse dif∗
S, chenel primo caso (quello con leai) e σ 〈v′1, . . . , v′n〉⊥, e nel secondo (esclusa l’i-dentita) eσ 〈v∗0 , v∗2 , . . . , v∗n〉⊥. Fatti i conti risulta che il centro nel primo caso eσ 〈v0 −
∑ni=1 aivi〉, che non si appartiene con l’asse, mentre nel secondo eσ 〈v1〉,
che si appartiene con l’asse. Questo mostra che vi e corrispondenza biunivoca frale omologie speciali di asseσU da una parte, e l’insiemeU dall’altra: all’elemen-to u ∈ U corrisponde l’omologiafS il cui fV e dato dafV v = v sev ∈ U , efV v0 = v0 + u. In questa corrispondenza al prodotto di omologie corrispondela somma dei corrispondenti elementi diU , il che mostra intanto che le omologiespeciali di dato asse formano un gruppo abeliano. Inoltre, seu e la corrispondentefS sono date, acu (conc ∈ C) corrisponde l’omologia il cuifV efV v0 = v0+cu;sara indicata concfS; in tal modo le omologie descritte vengono a formare unospazio vettoriale suC isomorfo adU , e il loro prodotto sara quindi indicato colsegno+. La corrispondenza trovata dipende dalla scelta div0, ma la struttura dispazio vettoriale che ne scaturisce non ne dipende (dimostrazione immediata; mafarsela!). Lo spazio vettoriale delle omologie speciali diasseZ sara indicato conOmZ .
Dati dunqueS eZ, siaA l’insieme dei punti diS che non si appartengonoconZ, e siaT = OmZ ; la coppia(T,A) e uno spazio affine di dimensionensuC se si definisce, pert ∈ T eP ∈ A, P + t = [trasformato diP mediantet](quello che normalmente si indicherebbe contP ): ed infatti lea), b), c) delladefinizione nella Lezione 17 sono soddisfatte. Questo(T,A) sara chiamato lospazio affine ottenuto mediante la scelta dell’iperpiano improprio(o all’infinito )Z; il sottospazio diS di sostegnoZ, ed i suoi elementi, sottospazi e stelle, sonochiamatiimpropri o all’infinito ; gli altri, propri o al finito (ma una stella al finitopuo avere centro all’infinito).

Spazi proiettivi 43
La costruzione non sarebbe molto significativa se non si mostrasse che le ap-plicazioni affini sono tutte e sole le restrizioni agli spaziaffini di certe applicazioniproiettive:Teorema 2.23.2.SianoS, S′ spazi proiettivi suC, C ′, di dimensionin, m nonnegative; siano(T,A) e (T ′,A′) gli spazi affini ottenuti daS, S′ mediante sceltadi iperpiani impropriZ, Z ′. Un’applicazione proiettivagS di S suS′ e tale che lasua restrizionegA adA (supposta applicazione diA suA′) e applicazione affinedi (T,A) su(T ′,A′) se, e solo se,gSZ ≤ Z ′. Ed ognigA proviene nel modo dettoda un’unicagS .Dim. SegA e applicazione affine, intantogAA ⊆ A′, ondeg−1
S (Z ′ ∩ sostimgS)e un insieme di elementi diS tutti ≤ Z; quello di massima dimensione dovendoavere dimensionen− 1, esso coincidera conZ; cio mostra chegSZ ≤ Z ′. Reci-procamente, segS ha la proprieta detta, si hagSZ ≤ (Z ′∩sostimgS), ed un contodi dimensioni mostra che deve valere l’=; quindi di nuovog−1
S (Z ′ ∩ sostimgS)contiene un elemento di dimensionen − 1 che deve coincidere conZ; ed infinegSA ⊆ A′. Fissato unP ∈ A, per ognit ∈ T pongasigT t = gA(P + t)− gAP ;nelle notazioni della dimostrazione del Lemma 2.23.1 questo e equivalente al direche set e data dav0 7→ v0 + u, la gT t e data dagV v0 7→ gV v0 + gV u; percio lagT e semilineare daT aT ′, e lagA e affine.
Per ultimo, si vede subito che questa coppia(gT , gA) poteva essere assegnata,col che ilgV , e quindi ilgS , veniva determinato dall’ultima formula scritta. C.V.D.
In particolare, nel Teorema 2.23.2 il nucleo digS deve aver sostegno chesi appartenga conZ; cio spiega perche non si e mai parlato del nucleo nelleapplicazioni affini: esso e fuori dello spazio affine.
Confrontando con la Lezione 18 si vede ora che AffA e la restrizione adA delgruppo delle proiettivita che hannoZ come elemento unito; cheT e la restrizioneadA di OmZ ; e che GL(T ) e il gruppo delle restrizioni adA delle proiettivitadi S che hannoZ edO come elementi uniti. In un’altra parte di queste lezionivedremo che cosa significa, dal punto di vista proiettivo, introdurre una metrica inA.
2.24 Lezione 24
Diamo un lemma che nel seguito sara continuamente usato; premettiamo che lascritturax1, . . . , xi, . . . , xn significax1, . . . , xn saltandoxi.Lemma 2.24.1.Sia V spazio vettoriale di dimensionen sul corpoC, e ne siav1, . . . , vn una base; siau un elemento diV che non appartenga al sottospazio〈v1, . . . , vj , . . . , vn〉 (per ogni j). E allora possibile sceglierev′1, . . . , v
′n, u
′ inmodo che〈v′i〉 = 〈vi〉 per ognii, che〈u′〉 = 〈u〉, e cheu′ = v′1 + · · · + v′n; e sev′′i , u′′ e un’altra tale scelta, esiste unc ∈ C non nullo tale chev′′i = cv′i.Dim. Sarau =
∑i xivi, conxi 6= 0 per ognii; basta prendereu′ = u, v′i = xivi.
Data poi l’altra scelta, e suppostou′′ = cu′, da∑
i v′′i =
∑i cv
′i, e dav′′i = civ
′i
(dato che〈v′′i 〉 = 〈v′i〉) si ricavaci = c. C.V.D.

44 Capitolo 2
Dato ora unSn suC, sianoP0, . . . , Pn suoi punti; essi formano un(n + 1)-edro(un triangolo sen = 2) se nessun elemento diSn, che non sia il sostegno, licontiene tutti; insomma, seP0 + ·+Pn = sostSn. Se(P0, . . . , Pn) e un(n+1)-edro, siaU un punto diSn che non si appartenga con nessuno degli iperpianiP0+ · · ·+ Pi+ · · ·+Pn; l’insieme ordinato(P0, . . . , Pn, U) si chiama unsistemadi riferimentoin Sn; in particolare, l’(n+1)-edro(P0, . . . , Pn) ne e l’(n+1)-edrofondamentale, edU ne e ilpunto unita. Il Lemma 2.24.1 mostra che si possonotrovare e sono unici, a meno di un fattore non nullo inC, gli elementiv0, . . . , vn, udi V = σ−1sostSn, tali chePi = σ 〈vi〉, U = σ 〈u〉, eu = v0 + · · ·+ vn. SeP eun punto qualsiasi diSn, lexi ∈ C tali cheP = σ 〈
∑i xivi〉 ne sono lecoordinate
proiettiveo omogenee; esse sono determinate a meno di un fattore non nullo inC;ed ogni tale(n+1)-upla, eccetto quella nulla, da un punto diSn; quindi lo spaziopunteggiato legato adSn e in corrispondenza biunivoca con le matrici(n+1)×1( x0
...xn
)non nulle ad elementi inC, intendendo pero che matrici proporzionali
diano lo stesso punto; in particolare, le coordinate diU sono1, . . . , 1, donde ilnome di punto unita. Naturalmente, appena e dato un sistema di riferimento inSn
ne e subito dato uno inS∗n, costituito dagli iperpianiRi = P0+ · · ·+ Pi+ · · ·+Pn
di Sn come(n+1)-edro fondamentale, e da un punto unita inS∗n che e l’iperpiano
Z di Sn che si appartiene con tutti i puntiUij cosı definiti: le coordinate diUij
sono tutte0, eccettoxi = 1 edxj = −1. Di nuovo, gli iperpiani diSn sono incorrispondenza biunivoca (a meno del solito fattore di proporzionalita) con tuttele (n + 1)-uple non nulle di numeri diC, che ora pero scriveremo come matrici1× (n+ 1) (a0, . . . , an); l’iperpiano unita e(1, . . . , 1). Le ai sono naturalmentele coordinate proiettive di un punto diS∗
n; ma quando sono viste come coordinatedi un iperpiano diSn sogliono essere chiamatecoordinate pluckeriane. Si ha
Teorema 2.24.2.Con la precedente scelta di sistemi di riferimento inSn edS∗n,
l’iperpiano a = (a0, . . . , an) ed il puntox =
( x0
...xn
)si appartengono se, e solo
se,ax = 0.
Dim. Ci riferiamo alle considerazioni che chiudono la lezione 22, ed al (2.22.3);se i vi, u sono quelli che sono serviti per costruire il sistema di riferimento inSn, si haRi = σ 〈v∗i 〉⊥, ovev∗i = (−1)iv0 ∧ · · · ∧ vi ∧ · · · ∧ vn ∈ En = V ∗
(non farsi spaventare dal−1, che e comodo ma non ha effetto suRi); si ha ancheZ = σ 〈u∗〉⊥, ove u∗ =
∑i v
∗i , come si vede sfruttando appunto il (2.22.3),
ed il fatto cheZ deve appartenersi con gliUij = σ 〈vi − vj〉. Questo mostrache una delle dualita “” fra V edEn di cui si parla alla fine della lezione 22 eottenibile mediantee = v0 ∧ · · · ∧ vn. I v∗i , u∗, sono legati fra loro come vuole ladefinizione di sistema di riferimento, ed iv∗i formano una base inV ∗, duale dellav0, . . . , vn. OraRi = σ∗ 〈v∗i 〉 in quanto elemento diS∗
n, eZ = σ∗ 〈u∗〉, il σ∗
essendo dato da (2.20.2). La relazioneax = 0 viene cosı a significare(∑
i aiv∗i )
(∑
i xivi) = 0, ossia∑
j xjvj ∈ 〈∑i aiv∗i 〉⊥, e infinex < a (identificandox ed
a col punto e l’iperpiano), per (2.20.2). C.V.D.

Spazi proiettivi 45
Il (2.24.2) e interpretabile nel solito modo: l’iperpianoa e il “luogo” dei puntix tali cheax = 0; questa e cio che di solito si chiama “l’equazione” di a. E ancheinterpretabile, inS∗
n, alla rovescia: il puntox e “l’ inviluppo” degli iperpiania talicheax = 0; questa ha quindi diritto di chiamarsi “l’equazione” del puntox.
Ora che abbiamo le coordinate e facile vedere chi e il gruppo delle proietti-vita: e il gruppo quoziente del gruppo moltiplicativo delle matrici(n+1)×(n+1)ad elementi inC, di determinante non nullo, modulo il sottogruppo delle ma-trici scalari non nulle; la proiettivita di matriceM manda il puntox suMx, el’iperpianoa suaM−1.
Se fissiamo(1, 0, . . . , 0) = R0 come iperpiano improprio, lo spazio affineAn che si ottiene e costituito dai puntix conx0 6= 0; il fattore di proporzionalita
puo essere eliminato col richiedere chex0 = 1, ossia coll’identificare
( x0
...xn
)con
(x′
0
...x′
n
), ovex′i = xi/x0; ecco che lex′i sono le coordinate cartesiane del punto
x, nel sistema di riferimento affine(P0, t1, . . . , tn), oveti e l’omologia specialedi asseR0 che mandaP0 suσ 〈v0 + vi〉 (cfr. lezione 17). Per il Teorema 2.23.2,le affinita diAn sono le restrizioni adAn delle proiettivita aventi matriceM (adeterminante non nullo) tale che(1, 0, . . . , 0)M−1 = (1, 0, . . . , 0); di tali M sonopercio tutte quelle del tipoM =
(1 t0b M ′
), conM ′ matricen × n a determinante
non nullo. Questo spiega la strana forma (1.18.4) delle matrici delle affinita.Per quanto precede, una proiettivita manda un sistema di riferimento (di punti
o di iperpiani) in un altro, ed e completamente determinatada questa coppia:Teorema 2.24.3.SianoP0, . . . , Pn+1 punti (o iperpiani) di unSn, tali che nessuna(n + 1)-upla di essi si appartenga con un iperpiano (risp. punto); idem perP ′0, . . . , P
′n+1 edS′
n; allora esiste una unica proiettivita fS di Sn suS′n (se iP ,
P ′ sono tutti punti o tutti iperpiani), o una unica reciprocita fS di Sn suS′n (se i
P son punti ed iP ′ iperpiani, o viceversa) tale chefSPi = P ′i per ognii.
2.25 Lezione 25
Per la retta proiettivaS1 i sistemi di riferimento hanno un carattere particolarmen-te semplice; intanto un sistema di riferimento consiste di tre punti, che sarannochiamatiP∞ (quello che verra preso come punto improprio per costruireuna rettaaffine),P0 (quello che sara preso come origine), eP1 (punto unita), a 2 a 2 distinti.SeP e un altro punto, le coordinate proiettive diP si trovano cosı:P∞ = σ 〈v∞〉,P0 = σ 〈v0〉, P1 = σ 〈v∞ + v0〉 per (2.24.1),P = σ 〈x∞v∞ + x0v0〉; e coordi-nate diP sonox0, x∞. Per la retta affineA, con punto improprioP∞, la coordi-nata ascissa rispetto a(P0, t), ovet mandaP0 suP1 e lascia fissoP∞, ex = x∞
x0.
Questox ∈ C (oppurex = ∞ seP = P∞; qui si puo usare questo simbolo,perche la retta proiettiva ha esattamente un punto in piu di quella affine, ed alloraa questo punto si puo dare una coordinata “affine” che naturalmente non sta inC,per esempio il simbolo∞) si chiama ilbirapporto dei quattro punti, e si indica

46 Capitolo 2
con (P∞,P0,P1,P ). Si puo subito fare una serie di giochetti; poniamo
(2.25.1)
(P ,Q,R,S) = x; allora si vede subito che
(Q,P ,R,S) = (P ,Q,S,R) =1
x(l’ultima seS 6= P,Q)
(P ,R,Q,S) = (S,Q,R,P ) = 1− x (l’ultima seS 6= Q,R)
.
Scambiando in tutti gli altri modi possibili, e purcheS sia diverso daP,Q,R, sitrovano solo i6 seguenti valori:x, 1
x , 11−x , 1− 1
x = x−1x , 1
1− 1
x
= 1− 11−x = x
x−1 .
Sex = −1, questi si riducono ai soli3 valori −1, 2, 12 (ovvero 1, 0,∞ seC
ha caratteristica2); in questo caso l’insieme ordinato(PQRS) si chiamagruppoarmonico (uso arcaico della parola gruppo), e si dice anche cheS e il quartoarmonicodopoP,Q,R,o infine cheR,S (risp. P,Q) separano armonicamenteP,Q (risp.R,S). Le (2.25.1) permettono di dare significato a (P ,Q,R,S) anchequando solo3 dei 4 punti sono distinti, visto che un significato c’e quandoScoincide conP , oQ, odR; ecco i significati che si ottengono: (P ,P ,Q,S) = 1,(P ,Q,P ,S) = 0, (P ,Q,Q,S) = ∞, oltre naturalmente a (P ,Q,R,P ) = ∞,(P ,Q,R,Q) = 0, (P ,Q,R,R) = 1.
Chiaramente le proiettivita conservano i birapporti, mentre le collineazioniapplicano ad essi l’isomorfismop di C legato alla collineazione. Siano alloraa, b, c, d quattro elementi diC ∪ ∞, di cui almeno tre distinti, per esempioa, b, c, e sianoA,B,C,D (questa e un’altraC, ma non si fara confusione) i quat-tro punti diS che li hanno come coordinate ascisse rispetto aP∞, P0, P1. C’eun’unica proiettivita che mandaA suP∞, B suP0, C suP1, ed essa manderaD su unX tale che (A,B,C,D) = (P∞,P0,P1,X). Ogni proiettivita ha unamatrice( r s
r′ s′ ) = M , e manda il punto di coordinate proiettive( x∞
x0) nel punto
di coordinateM ( x∞
x0). Quindi manda il punto di coordinata ascissax in quel-
lo di coordinata ascissarx+sr′x+s′ ; poiche deve mandarea su∞, b su 0, c su 1, si
ricava s′ = −r′a, s = −rb, e r(c − b) = r′(c − a). Il punto D viene man-dato sul puntoX di coordinata rd+s
r′d+s′ = (c−a)(d−b)(c−b)(d−a) ; quindi e questo il valore di
(A,B,C,D) = (P∞,P0,P1,X). Questo valore dipende solo daa, b, c, d e sarachiamato ilbirapportodi questi quattro elementi diC ∪ ∞:
(2.25.2) (a, b, c,d) =(c− a)(d− b)
(c− b)(d− a).
Qui e bene osservare che, per quanto detto prima sul significato del simbolo∞ come “ascissa” del punto improprio, finche si lavora con birapporti si avverail sogno del matematico pigro, ossia:1∞ = 0, 1
0 = ∞, ed anche, con cautela,∞∞ = 1 (ma 2∞
∞ = 2) e 00 = 1 (ma 2·0
0 = 2!).Torniamo ai gruppi armonici per fare un disegnino:

Spazi proiettivi 47
n
p
q s
P XQ
A
B
C
D
R
H
m
h
r
Sono date la rettah ed i puntiP , Q, R; si vuole costruire il quarto armonicoXdopo questi tre; il disegno si spiega da se; la figura costituita daABCDmnpqrs eunquadrangolo piano completo: 4 punti (vertici) a3 a3 non allineati, e le6 rette(lati) che li congiungono a2 a2; lati che s’incontrano su un vertice sonoadiacenti(comep, m); se no,opposti(comep, q); i tre punti d’incontro di coppie di latiopposti (ossiaP , Q, H) sono ipunti diagonali. Spiegazione del perchePQRX egruppo armonico:
(P ,Q,R,X) = (A,C,H,X) (proiezione dih daB sur)= (Q,P ,R,X) (proiezione dir daD suh)
(dimostrare che queste proiezioni si possono fare, ossia che i centri sono comple-mentari alle rette con cui si sega). Quindi, per (2.25.1), ilnumerox = (P ,Q,R,X)soddisfa allax = 1
x , x2 = 1, x = ±1; se la caratteristica non e2, non ex = 1percheX non coincide conR (dimostrarlo!); quindix = −1.
Costruzione duale (farsi il disegno): puntoH e rettep, q, r per esso;qua-drilatero piano completocon lati abcd, vertici PQRSMN , e diagonali p, q,h = rettaRS. Rettax perR edH e quarta armonica dopop, q, r.
Esercizio: ora che conosciamo birapporti e gruppi armonici, trovare chi sonoin realta iQij della lezione 24.
2.26 Lezione 26
Si e visto che le collineazioni cambiano il birapporto solonel senso che ci appli-cano ilp della semilinearita; l’importante e che vale il reciproco:
Teorema 2.26.1.SianoS, S′ rette proiettive sui corpiC, C ′; sia p isomorfi-smo diC su tuttoC ′, e siafS applicazione biunivoca diS su tuttoS′ con laproprieta seguente: intanto manda sostegno su sostegno e vuoto su vuoto, e poiesistono punti distintiP∞, P0, P1 di S tali che per ogni puntoP ∈ S si abbia(fSP∞,fSP0,fSP1,fSP ) = (P∞,P0,P1,P )p. allora fS e collineazione diS suS′.
Dim. SiaV = σ−1sostS, V ′ = σ′−1sostS′, e poiP∞ = σ 〈v∞〉, P0 = σ 〈v0〉,P1 = σ 〈v0 + v∞〉, come e possibile a norma del (2.24.1). Scelgo analogamentefSP∞ = σ′ 〈v′∞〉, ecc.; oraV = 〈v∞, v0〉, e V ′ = 〈v′∞, v′0〉, sicche esiste un

48 Capitolo 2
p-semiisomorfismofV di V su tuttoV ′ tale chefV v∞ = v′∞, fV v0 = v′0 ondefV (v0+v∞) = v′0+v′∞. Dico chefSσ 〈v〉 = σ′ 〈fV v〉 per ogniv, col che sara di-mostrato chefS e collineazione (cfr. 2.21.1). E infatti (fSP∞,fSP0,fSP1,fSP ) =(P∞,P0,P1,P )p = (P ′
∞,P ′0,P ′
1,P ′), la prima eguaglianza per ipotesi sufS, e laseconda perche laσ 〈v〉 7→ σ′ 〈fV v〉 e collineazione. L’identita del primo e ultimobirapporto dimostrano quanto si voleva. C.V.D.
Si notera che ci si va sempre piu allontanando da costruzioni “vettoriali” edavvicinandosi a costruzioni “geometriche”, intendendosicon questo quelle costru-zioni e dimostrazioni che sfruttano solo le proprieta delle operazioni+ e∩ neglispazi proiettivi ed il concetto di dimensione degli elementi (dette ancheproprietadi appartenenza); del resto cio non deve sorprendere se si pensa che la geometriaproiettiva e nata dalla teoria della prospettiva nel disegno, e che solo recentemen-te si e inquinata con spazi vettoriali, prodotti esterni e altre diavolerie. Il (2.26.1)caratterizzerebbe le collineazioni fra rette senza ricorso a spazi vettoriali se si po-tesse definire il birapporto in maniera puramente geometrica. Questo non lo sipuo in realta fare, ma si e visto nella lezione 25 che certibirapporti (quelli= −1)sono definibili geometricamente. E vi e inoltre un caso speciale nel quale bastaconservare questi birapporti per avere una collineazione;il caso e in realta abba-stanza generale, in quanto copre tutte le caratteristiche eccetto2; acquista perosignificato geometrico (mediante la costruzione grafica della lezione 25) solo sela retta su cui si considerano i birapporti e gia sottospazio di unSn conn ≥ 2:
Teorema 2.26.2.SianoS, S′ rette proiettive sul corpoC di caratteristica 6= 2 >,e siaf un’applicazione diS su tuttoS′ che mandi vuoto su vuoto, sostegno susostegno, e tale chefP, fQ, fM, fN sia gruppo armonico ogniqualvolta taleeP,Q,M,N ; allora f e collineazione. Se poiC, come gruppo additivoe ordinatoe archimedeo,f e proiettivita.
Dim. (Comessatti). FissiamoP∞, P0, P1, e P ′i = fPi, sicche suS, S′ so-
no fissate coordinate ascisse, edf puo essere considerata come applicazione diC ∪∞ su tutto se stesso, che lascia fissi∞, 0, 1; si deve dimostrare chef e au-tomorfismo diC. (0, 2x,x,∞) = −1 per (2.25.2), sicche (0,f(2x), f(x),∞) =−1, ondef(2x) = 2f(x) per (2.25.2). Poi (2x, 2y,x+ y,∞) = −1, onde(2f(x),2f(y),f(x+ y),∞) = −1 che daf(x + y) = f(x) + f(y). Infine(x,−x,1,x2) = −1, onde (f(x),f(−x),1, f(x2)) = −1; maf(−x) + f(x) =f(−x+ x) = f(0) = 0, sicchef(−x) = −f(x), e la precedente porgef(x2) =f(x)2; ora
2f(xy) = f(2xy) = f((x+ y)2 − x2 − y2) =
= f((x+ y)2)− f(x2)− f(y2) = f(x+ y)2 − f(x)2 − f(y)2 =
=(f(x) + f(y)
)2 − f(x)2 − f(y)2 = 2f(x)f(y),
e cio dimostra, con le precedenti, chef e automorfismo diC.SeC e ordinato e archimedeo come gruppo additivo, esso e sottogruppo or-
dinato dei reali (2.39 di [AA]); laf(x2) = f(x)2 dice allora che lef -immaginidei positivi sono positive (2.40 di [AA]), sicchef e applicazione ordinata diC in
Spazi proiettivi 49
se; ma manda1 su 1 perche e isomorfismo di corpi, sicche per la 2.38 di [AA]essa e l’applicazione identica diC in se, e proviene quindi da una proiettivita diS suS′. C.V.D.
Si noti che in caratteristica6= 2 il (2.26.2) darebbe una notevole semplifica-zione della prossima dimostrazione del punto 3 del Teorema 2.27.1.
Il Teorema 2.26.2 spiega la preminenza dei gruppi armonici nella geometriaproiettiva classica: essa era costruita sul corpo reale, quindi per controllare cheun’applicazione biunivoca fra rette fosse una proiettivita bastava controllare checonservasse i gruppi armonici. [Fra parentesi, il nome gruppo armonico discendedalla musica: si credeva che un accordo musicale fosse gradevole quando le lun-ghezze delle corde (supposte ugualmente tese e dello stessomateriale) fossero inprogressione armonica, e cioe tali che i loro reciproci (che ora sappiamo essereproporzionali alle frequenze) fossero in progressione aritmetica. Ed i numeria, x,b sono appunto in progressione armonica se, e solo se,0 ex separano armonica-mentea, b. In pratica l’unica base per la credenza era l’accordo tonale maggiore(do mi sol), ove i rapporti delle frequenze, con 5 decimali esatti, e con la “scalatemperata” usata oggigiorno, sono4, 00000 : 5, 03968 : 5, 99324, abbastanzavicini a 4 : 5 : 6.]
La speranza di poter fare tutto geometricamente, che fallisce nel caso piusemplice (retta) fra i non banali (i banali sono il vuoto proiettivo ed il punto pro-iettivo), e invece ben riposta per gli spazi di dimensione> 1; a cio e dedicato ilresto di questa parte di lezioni. Prima di enunciare il risultato che segue, avvertia-mo che laproiezione inS di A daB suD (usata sia come operazione, sia comerisultato dell’operazione) significa la proiezione inS di A daB (ossia proiezionedi centroB, ristretta adA), seguita dalla sezione inS conD.
Lemma 2.26.3.Sianor, r′ rette di un piano proiettivoS2, e sianoR, R′ i sotto-spazi proiettivi diS2 di sostegnir, r′; allora ogni proiettivita diR suR′ e prodottodi al piu tre proiezioni inS2, di rette da punti su rette.
Dim. Ser 6= r′ la dimostrazione e tutta contenuta nel disegno seguente:
B
A
C
B′
A′
C ′
C ′′
B′′
X ′′
r
r′
s
X
X ′
H
50 Capitolo 2
La spiegazione e questa: la proiettivitaf mandaA,B,C suA′, B′, C ′, oveA,A′
sono diversi daH = r ∩ r′ (possibile perche una retta ha almeno3 punti, vistoche un corpo ha almeno2 elementi); per (2.24.3), queste tre coppie determinanola proiettivita f . D’altra parte si costruiscanoB′′ = (A + B′) ∩ (A′ + B) eC ′′ = (A+C ′)∩ (A′+C), che sono distinti, e si scrivas = B′′+C ′′ (questas edettaasse di collineazione). Ora una proiettivitag di R suR′ puo essere costruitacosı: partendo dal puntoX di R, lo si proietti daA′ sus, in X ′′; si proiettiX ′′
daA sur′, e sia questoX ′ = gX. La g e costruita con due proiezioni, e mandaA,B,C in A′, B′, C ′; dunqueg = f come voluto.
Se invecer = r′, usiamo unr′′ 6= r, e costruiamo una proiettivitah di R′ suR′′ mediante proiezione suR′′ di R da un puntoO fuori di r edr′′. Sef era ladata daR adR′, la hf e fraR edR′′, onde per quanto precedehf e prodotto didue proiezioni; ma alloraf = h−1hf e prodotto di tre. C.V.D.
Il disegno del Lemma 2.26.3 da un metodo pratico di costruzione di pro-iettivita. Se la proiettivita si puo ottenere con una sola proiezione (diR, da unpuntoD, suR′), viene chiamata anche unaprospettivita, ed ilD ne e ilcentro diprospettiva. Dimostrare per esercizio che:Corollario 2.26.4. Notazioni come in (2.26.3), ma conr 6= r′. Allora la dataproiettivita e una prospettivita se, e solo se, il puntoH = r ∩ r′ corrisponde a sestesso.
2.27 Lezione 27
Tre punti di unSn si chiamanoallineati se si appartengono con una medesimaretta. Il risultato seguente e centrale, e da fra l’altro il motivo del nome “collinea-zione”; e il primo teorema “sodo” di geometria proiettiva che esponiamo3
Teorema 2.27.1.SianoS, S′ piani proiettivi sui corpiC, C ′; sia g applicazionebiunivoca diS su tutto quello diS′ che mandi terne di punti allineati su terne dipunti allineati. Allorag e univocamente estensibile ad una collineazione diS suS′.
Dim. Estendiamo subito lag cosı (e sara chiaramente l’unica possibilita di esten-sione con speranza di rendere lag collineazione):g(vuoto diS) = vuoto diS′,g(sostS) = sostS′; poi, ser e retta diS, e per esempior = P + Q, conP , Qpunti, poniamogr = gP +gQ; la condizione sull’allineamento mostra che questae una buona definizione. Se poir 6= s, e certogr 6= gs: se infatti fossegr = gs,per ogni puntoP di S (esclusor ∩ s) si trovino puntiPr, Ps, appartenentisi conr, s rispettivamente, tali cheP , Pr, Ps siano allineati, e che nePr nePs coincida
3Il teorema seguente, o meglio, la sua successiva generalizzazione a dimensione maggiore, sitrova spesso in letteratura con il nome di “Teorema Fondamentale della Geometria Proiettiva” (equesto il caso del libro [GA] Emil Artin,Geometric Algebra(Interscience, 1957)) e trova genera-lizzazioni a spazi proiettivi su anelli. Qui Barsotti si differenzia dalla tradizione e chiama TeoremaFondamentale un successivo teorema sulla decomposizione delle proiettivita in una successione diproiezioni.

Spazi proiettivi 51
conr ∩ s. Allora sono allineatigP , gPr, gPs, e inoltre,gPr, gPs sono distinti esi appartengono congr; quindi gP si appartiene congr, contro l’ipotesi cheimgsia tutto il piano punteggiato. Si conclude che l’estensione di g ora costruita einiettiva. E anche suriettiva: se infatti,r′ e retta diS′ eP ′, Q′ sono punti che conessa si appartengono, si har′ = g(g−1P ′ + g−1Q′).
La dimostrazione si articola in varie parti:1. Scegliamo3 punti allineati e distintiP∞, P0, P1 in S e le lorog-immagini
P ′i in S′, che sono distinte e allineate. Ser = P∞ + P0 e r′ = gr = P ′
∞ +P ′0, per ogni puntoX che si appartenga conr, l’X ′ = gX si appartiene conr′.
Dato allorax ∈ C, si cerchiX tale chex = (P∞,P0,P1,X), e si pongaxp =(P ′
∞,P ′0,P ′
1,X′), ove maturalmenteX ′ significagX. La x 7→ xp e applicazione
di C suC ′; proviamo anzitutto che essa e su tuttoC ′: datox′ ∈ C ′, sceltoX ′
tale che (P ′∞,P ′
0,P ′1,X ′) = x′, basta dimostrare cheX ′ = gX per unX ben
determinato. Puo questoX non appartenersi conr? Se cosı fosse, la rettaX+P0
sarebbe diversa dar, ma avrebbe comeg-immagine laX ′+P ′0 = r′ = gr, contro
la dimostrata biunivocita dig anche fra rette.2. Dimostriamo che l’applicazionep di C suC ′ costruita in1 e indipendente
dalla scelta diP∞, P0, P1; si scelgano anche deiQ∞, Q0, Q1, e siaq l’applica-zione diC suC ′ che se ne ricava; siat = Q∞ + Q0, e siaf la proiettivita diR(retta proiettiva di sostegnor) suT (retta proiettiva di sostegnot) che mandaPi
suQi; posto poiQ′i = gQi, siaf ′ costruita analogamente traR′ eT ′. Sia ha
(Q∞,Q0,Q1,X)p = (P∞,P0,P1,f−1X)p =
= (P ′∞,P ′
0,P ′1,gf
−1X) = (Q′∞,Q′
0,Q′1,f ′gf−1X);
d’altra parte (Q∞,Q0,Q1,X)q = (Q′∞,Q′
0,Q′1,gX), e si sarebbe a cavallo se si
potesse dimostrare chef ′gf−1 = g, ossia chegfg−1 = f ′. Ora il (2.26.3) dicechef ed f ′ si ottengono con al piu tre proiezioni; se percio ogni proiezione (=proiezione e sezione) che si attua inS per costruire laf , viene ripetuta inS′ conle g-immagini (dei centri delle proiezioni ecc.), si ottiene inS′ la f ′; ma d’altraparte la proiettivita che si ottiene inS′ e anchegfg−1; quindi gfg−1 = f ′, comevoluto. resta cosı provato chep = q.
3. Ora mostriamo (seguendo una dimostrazione di Emil Artin)chep e iso-morfismo di corpi; ci occorrono gli spazi vettorialiV = σ−1sostS e V ′ =σ′−1sostS′, di dimensione3; anzi, possiamo supporre cheσ e σ′ siano l’iden-tita, cosiccheg applica[V ] su [V ′]. SiaV = 〈v1, v2, v3〉, V ′ = 〈v′1, v′2, v′3〉, con〈v′i〉 = g 〈vi〉 e 〈v′1 + v′2 + v′3〉 = g 〈v1,+v2 + v3〉 (possibile per 2.24.1). Poiche〈v1 + v2〉 e allineato con〈v1〉, 〈v2〉, ed anche con〈v3〉, 〈v1 + v2 + v3〉, lo stessovale dopo aver applicatog, e ci dice che
g 〈v1 + v2〉 =⟨v′1, v
′2
⟩∩⟨v′3, v
′1 + v′2 + v′3
⟩=⟨v′1 + v′2
⟩.
Analogamente per〈v2 + v3〉 e 〈v′2 + v′3〉. Visto questo, ricordiamo che il dire,per esempio, che (〈v1〉, 〈v2〉, 〈v1 + v2〉, 〈v〉) = x ∈ C e equivalente a dire che〈v〉 = 〈v2 + xv1〉. Ora si ha:

52 Capitolo 2
3a. 〈v′1 + v′3 + (x+ y)pv′2〉 = [punto diS′ che ha birapporto(x + y)p do-po 〈v′2〉, 〈v′1 + v′3〉, 〈v′1 + v′2 + v′3〉] = [g-immagine del punto diS che ha birap-portox + y dopo〈v2〉, 〈v1 + v3〉, 〈v1 + v2 + v3〉] = g 〈v1 + v3 + (x+ y)v2〉 ⊆g(〈v1 + xv2〉+ 〈v3 + yv2〉) = 〈v′1 + xpv′2〉+ 〈v′3 + ypv′2〉.Se ora si esprime il fatto chev′1 + v′3 + (x + y)pv′2 e combinazione lineare div′1 + xpv′2 ev′3 + ypv′2, si trova che esso e la loro somma, e che percio(x+ y)p =xp + yp.
3b. 〈v′1 + xpv′3 + (xy)pv′2〉 = [punto diS′ che ha birapporto(xy)p dopo〈v′2〉,〈v′1 + xpv′3〉, 〈v′1 + v′2 + xpv′3〉] = [g-immagine del punto diS che ha birapportoxy dopo〈v2〉, 〈v1 + xv3〉, 〈v1 + v2 + xv3〉] = g 〈v1 + xv3 + (xy)v2〉 ⊆ g(〈v1〉+〈v3 + yv2〉) = 〈v′1〉+ 〈v′3 + ypv′2〉.Se ora si esprime il fatto chev′1 + xpv′3 + (xy)pv′2 e combinazione lineare div′1 ev′3 + ypv′2, si trova che e la somma del primo con il secondo moltiplicato perxp,e che percio(xy)p = xpyp, ed e dimostrato chep e omomorfismo di corpi.
4. Resta da dimostrare che esiste un’applicazionep-semilineareh di V sututto V ′ tale che〈hv〉 = g 〈v〉 per ogniv. Ma ora basta prenderehvi = v′iper i = 1, 2, 3; infatti, per (2.26.1) e (2.24.3) si avra〈hv〉 = g 〈v〉 per ogniv ∈ 〈v1, v2〉; preso poi un〈w〉 6= 〈v3〉, e anche6= 〈0〉, sia〈v〉 = 〈v3, w〉∩〈v1, v2〉.Allora g 〈v〉 = 〈hv〉 eg 〈v3〉 = 〈hv3〉, onde di nuovog 〈w〉 = 〈hw〉 perche〈w〉 eallineato con〈v〉 e 〈v3〉. C.V.D.
2.28 Lezione 28
Teorema 2.28.1.Il (2.27.1) resta vero quandoS, S′ siano spazi proiettivi didimensionen ≥ 2.
Dim. Intanto, l’estensione dig da una applicazione di spazi punteggiati ad una dispazi proiettivi si fa come per il (2.27.1); in essenza consiste nell’identificare ogniA ∈ S con l’insieme dei punti che con esso si appartengono. Con ci`o si dimostracheg manda ogni sottospazioT di dimensione2 in un T ′ di S′; e naturalmentenel cosı fare definisce, per (2.27.1), un isomorfismopT di C su tuttoC ′. La primacosa da vedere e che questopT e in realta indipendente daT . Se infattiT e Zsono dueS2, e se dim(T ∩ Z) ≥ 1, e certopT = pZ , perche nella dimostrazionedel Teorema 2.27.1 era bastata una retta per definire ilp. Se invece,T ∩ Z hadimensione≤ 0, costruiamo una catena frasostT esostZ nel seguente modo: sesostT = P1 + P2 + P3 (punti) esostZ = Q1 +Q2 +Q3, la catena e:sostT =P1+P2+P3, P1+P2+Q1 (se non va beneQ1, ossia seP1+P2+Q1 e una rettae non un piano, andra beneQ2 o Q3), P1 + Q1 +Q2, Q1 +Q2 + Q3 = sostZ.Le intersezioni fra due elementi successivi della catena sono rette, onde di nuovopT = · · · = pZ ; lo chiameremop.
Ora occorre trovare l’applicazionep-semilinearef di V = σ−1sostS su tut-to V ′ tale che〈fv〉 = g 〈v〉 per ogniv, avendo di nuovo suppostoσ = σ′ =ι. Si comincia da basiv0, . . . , vn e v′0, . . . , v
′n tali che 〈v′i〉 = g 〈vi〉, e che
〈∑i v′i〉 = g 〈∑i vi〉 (per 2.24.1), e si definiscefvi = v′i. Questaf manda
una somma divi nella somma corrispondente div′i; quindi mandav0, v1, v0 + v1

Spazi proiettivi 53
in v′0, v′1, v
′0 + v′1; ma lag manda〈v0〉 su 〈v′0〉, 〈v1〉 su 〈v′1〉, ed anche〈v0 + v1〉
su 〈v′0 + v′1〉, perche il punto〈v0 + v1〉 e l’intersezione della retta〈v0, v1〉 con〈v2, . . . , vn, v0 + · · ·+ vn〉. Quindi 〈fv〉 = g 〈v〉 sev ∈ 〈v0, v1〉, come nel punto4 della dimostrazione del Teorema 2.27.1. Poi si prosegue coni v ∈ 〈v0, v1, v2〉,dato che ognuno sta nel〈w, v2〉 per qualchew ∈ 〈v0, v1〉, ecc. C.V.D.
Siamo cosı giunti al
Teorema 2.28.2(T. Fondamentale della Geometria Proiettiva). SianoT , T ′ sot-tospazi propri, della stessa dimensionem, di un Sn con n ≥ 1; allora ogniproiettivita di T suT ′ e prodotto di un numero finito di proiezioni inSn (di certiSr, da certi centri, su certiS′
s).
Dim. SeT , T ′ sono in uno stessoSm+1, bene; se no, preso unSm+1 ⊃ T , proiet-tiamoT ′ suSm+1, da un elemento diSn che sia complementare disostSm+1 inSn, e sghembo consostT ′. La proiezioneT ′′ e contenuta nello stessoSm+1 checontieneT , e se il teorema e vero perT eT ′′ e anche vero perT eT ′. Ci si e cosıridotti al caso in cuim = n − 1. Se poi, in questo caso,T = T ′, proiettiamoT ′
da un puntoP /∈ T su un iperpiano diSn diverso daT ; ora siamo ridotti al casoin cui T e T ′ hanno sostegni che sono iperpiani diversi, la cui intersezione sarapercio unoZ di dimensionem− 1 = n− 2 ≥ 0.
Distinguiamo a questo punto due sottocasi:1. Ogni puntoP che si appartiene conZ corrisponde a se stesso:fP = P
sef e la data proiettivita; dico allora chef e proiezione diT suT ′ in Sn da unpuntoU . Presi infatti puntiQ1, Q2 di T che non si appartengano conZ, e postoR = Z ∩ (Q1 +Q2), dafR = R segue chefQ1, fQ2, R sono allineati; quindiQ1, Q2, fQ1, fQ2 si appartengono con lo stesso piano, e le retteQi + fQi siappartengono con un puntoU ∈ Sn. QuandoQ percorre i punti diT che non siappartengono conZ, le retteQ + fQ sono incidenti percio a2 a 2; sem > 1questo puo accadere solo se il loro punto d’incontro e sempre lo stessoU ; seinvecem = 1, si puo raggiungere la stessa conclusione nel modo seguente: laproiezione diT suT ′ daU (l’U trovato per primo) mandaZ suZ (che ora e unpunto),Q1 sufQ1, eQ2 sufQ2; quindi, per (2.24.3) essa coincidef .
2. Non ogni punto che si appartiene conZ corrisponde a se stesso; in questocaso la dimostrazione si fa per induzione sum, dato che perm = 1 il risultatoe gia noto (2.26.3). Sia dunquem ≥ 2, e pongasiZ ′ = fZ ∈ T ′; SiaL uniperpiano diSn che si appartenga conZ ′, ma che non sia nesostT nesostT ′, epongasiZ ′′ = L∩ sostT , sicche dimZ ′′ = m− 1; siag una arbitraria proiettivitadi T suT ′, che sia prodotto di proiezioni e mandiZ ′′ suZ (e facile costruirla). Lafg ristretta aZ ′′ (che per risparmiare simboli sara identificato col sottospazio chelo ha per sostegno), e proiettivita diZ ′′ suZ ′, e per l’induzione e quindi costrui-bile, nello spazioL, mediante proiezioni da punti diL (diciamoH1, . . . ,Hr) disottospazi diL di dimensionem−1 (diciamoZ1 = Z ′′, Z2, . . . , Zr) su sottospazidella stessa dimensione, diciamoZ2, Z3, . . . , Zr+1 = Z ′. Se prendiamo per ogniZi un sottospazioZ ′
i di S di dimensionem, che contengaZi ma nonL, e in par-ticolare,Z ′
1 = T eZ ′r+1 = T ′, le proiezioni degliZ ′
i dagliHi sugliZ ′i+1 danno
una proiettivitah, prodotto di proiezioni, che estende daT a T ′ la restrizione difg aZ ′′.

54 Capitolo 2
Dah = fg suZ ′′ = g−1Z si ottienfg−1 = f suZ, ondegh−1f e proiettivitadi T suT ′ che induce l’identita suZ. Qui si casca nel caso1, sicchegh−1f eprodotto di proiezioni; ma tali essendoh e g, anchef deve essere prodotto diproiezioni. C.V.D.
Qui termina la esposizione dei fatti generali della geometria proiettiva; vi enaturalmente una messe di risultati particolari, che un tempo, in mancanza di teo-rie generali che ne permettessero la dimostrazione con metodi standard, dovevanoessere studiati e dimostrati caso per caso. Una parte di questi sara esposta nellasezione dedicata alle quadriche, sia perche di utilita immediata in altre parti dellamatematica ed anche in meccanica e fisica, sia perche a loro volta danno un esem-pio concreto di un’altra larga branca della geometria. Qui vogliamo solo darel’enunciato (lasciando la dimostrazione come esercizio) di un teorema di notevoleimportanza storica. Nomenclatura: untriangolo consiste di tre puntiA, B, C nonallineati, e delle tre rettea = B + C, b = A + C, c = A + B. Due triango-li ABCabc e A′B′C ′a′b′c′ dello stessoSn sonoomologici rispetto ad una certacorrispondenza biunivoca (per esempio laA 7→ A′, ecc) se i puntia ∩ a′, b ∩ b′,c ∩ c′, sono allineati; sono inveceprospettivise le retteA+ A′, B + B′, C + C ′
si appartengono con uno stesso punto. Cio premesso, l’asserto e il seguente:Teorema 2.28.3(di Desargues). Due triangoli sono omologici rispetto ad unacerta corrispondenza biunivoca se, e solo se, sono prospettivi rispetto alla stessacorrispondenza.

3Matrici
3.29 Lezione 29
Si e gia visto, e si continuera a vedere nel seguito, che molti risultati sono riducibilia proprieta delle matrici (per esempio la dualita, le norme, le proiettivita). Qui ciinteressiamo appunto di matrici pure e semplici. In generale si constata che certerelazioni di equivalenza fra matrici sono interessanti, e si cerca allora se fra tuttele matrici equivalenti ad una data ve ne sia una, o alcune, pi`u semplice delle altre;questa matrice piu semplice si chiama laforma canonicadella data rispetto aquella particolare equivalenza.
Un primo tipo di equivalenza e la congruenza (lezione 8), che si e visto essereutile quando si parla di forme quadratiche, norma dualita,ecc.; e una relazione diequivalenza fra matrici ad elementi in un corpo, che pero eimportante solo quandoci si limita a matrici che siano simmetriche o antisimmetriche, e quando inoltre ilcorpo non abbia caratteristica2; la forma canonica per congruenzae descritta nei(1.14.5), (1.14.6); quella di una matrice antisimmetrica nei (1.9.4), (1.10.2). Nonparleremo quindi piu della congruenza.
Prima di parlare di altri tipi di equivalenza ci occorre la nozione di modulo:SiaA un anello, che supporremo sempre commutativo e dotato di identita; unA-modulo (sinistro) e un insiemeM , con un’operazione+ (m + n ∈ M perm,n ∈ M ), ed una operazione di prodotto per scalari (am ∈ M pera ∈ A edm ∈ M ) soddisfacenti a tutti gli assiomi che dovrebbero essere soddisfatti seAfosse un corpo edM uno spazio vettoriale suA; in effetti, seA e un corpo, unA-modulo e proprio uno spazio vettoriale suA. I nostriA-moduli si supporrannosempreunitari ossia tali che1m = m per ognim ∈ M (1 e l’identita diA).Le definizioni di omomorfismo, isomorfismo, somma, complementare, ecc., diA-moduli possono essere immaginate; valgono i tre teoremi di isomorfismo; si puoanche immaginare che cosa sia un insieme di generatori di unA-modulo. NegliA-moduli si puo parlare di elementi linearmente dipendentio indipendenti (suA),e si puo parlare di combinazioni lineari; non e pero vero che se certi elementi sonolinearmente dipendenti, uno di essi debba essere combinazione lineare degli altri;quindi non si puo parlare di “base” o di “dimensione”.
Un A-modulo generato da elementi indipendentix1, x2, . . . dicesi libero oliberamente generato(dagli xi), e gli xi i suoi generatori liberi (il fatto di aver

56 Capitolo 3
indicizzato glix con gli interi non sta ad indicare che essi siano al piu una infi-nita numerabile). UnA-modulo generato da un numero finito di elementi dicesifinitamente generato, od anchefinito; uno con un solo generatore dicesicicli-co; uno senza sotto-A-moduli propri 6= 0 dicesisemplice; vale il Teorema diJordan-Holder1.
SiaM un A-modulo finito, generato dax1, . . . , xm; si chiede se esso e an-che generato day1, . . . , yn (suoi elementi). Cio sara vero se, e solo se, esistonoelementiaij , brs in A tali cheyi =
∑j aijxj, xr =
∑s brsys; niente di strano.
Suppongasi pero ora che tanto lex quanto ley generinoM liberamente; alloraxr =
∑s brsys =
∑sj brsasjxj, eyi =
∑j aijxj =
∑js aijbjsys, donde, per la
liberta,∑
s brsasj = δrj,∑
j aijbjs = δis. Se si sapesse che le matrici(aij), (brs)sono quadrate, ossia chem = n, queste ultime direbbero che esse sono l’una lareciproca dell’altra; e che esse siano quadrate lo si vede cosı: se fossem > n,la (aij) avrebbe meno righe che colonne, e la prima delle relazione precedentivisualmente apparirebbe cosı:
b a = 1 ;
aggiungendom− n ultime colonne nulle allab, edn −m ultime righe nulle allaa, la relazione resterebbe vera, il che e ovviamente impossibile perche ciascunamatrice al primo membro ha ora determinante nullo [parentesi quadra per i pigno-lissimi: la teoria dei determinanti l’abbiamo svolta per matrici ad elementi in uncorpo, mentre queste hanno elementi in un anello; pero la definizione di determi-nante e il teorema di Binet, possono essere trasferiti da un corpo ad un anello colmetodo seguito per il pfaffiano: si parte da matrici ad elementi che sono indeter-minate, e quindi in un corpo, e poi si applica un omomorfismo che manda questeindeterminate su elementi dell’anelloA]. Concludiamo percio col
Lemma 3.29.1.SiaM un A-modulo libero finito, e ne siax1, . . . , xm un in-sieme di generatori liberi; il numerom dipende solo daM , e leyi =
∑j aijxj
(i = 1, . . . ,m) formano un insieme di generatori, certo liberi, diM se, e solo se,la matrice(aij) e invertibile suA, ossia se, e solo se,det(aij) e una unita di A.
Il numerom si dira l’ordine di M (seA e un corpo, esso e la dimensionedello spazio vettorialeM ). SiaN un sotto-A-modulo finito diM , con generatoriliberi y1, . . . , yn, e siaH la matrice(hij) tale cheyi =
∑j hijxj ; se si sostitui-
scono i generatori liberixi con deglix′i (sempre liberi), e gliyi con degliy′i, saraanalogamentey′i =
∑j h
′ijx
′j; ci sono poi le matriciP = (pij), Q = (qij) tali che
1Si veda la Lezione 25 di [AA].
Matrici 57
y′i =∑
j pijyj , xi =∑
j qijx′j , sicche
y′i =∑
j
pijyj =∑
jr
pijhjrxr =∑
jrs
pijhjrqrsx′s.
La liberta da oraH ′ = PHQ; notare che:H edH ′ sonon × m; P e n × n;Q em ×m; P eQ sono invertibili suA. Morale: seH e una matrice legata adun sotto-A-modulo libero diM nel modo detto, un cambiamento dei generatoriliberi mandaH nellaH ′ = PHQ, conP , Q invertibili suA. Anche questa e unarelazione di equivalenza fra matrici presentatasi in modo naturale; e detta appuntoequivalenza(in A).
Strettamente legate ad esse sono leoperazioni elementari(in A) sulle matrici;esse sono le seguenti:
Operazioni elementarisulle righe(o a sinistra):
1. Moltiplicare una riga (ossia tutti i suoi elementi) per una unita dell’anelloA;2. Scambiare fra loro due righe;3. Aggiungere ad una riga il prodotto di un’altra per un elemento diA.
Operazioni elementarisulle colonne(o a destra): stessa roba, ma con le colon-ne.
Osserviamo che:
1. Moltiplicare la prima riga perc ∈ A significa moltiplicare la data matrice, asinistra, per ( c
1...
1
);
questa e invertibile sec e unita (se fosse stata lai-esima riga, l’elementocsarebbe andato nel posto(i, i));
2. Scambiare la prima con la seconda riga vuol dire moltiplicare a sinistra per ;
0 11 0
1...
1
;
invertibile suA;3. Aggiungere alla prima riga la seconda moltiplicata perc vuol dire moltiplicare
a sinistra per.
1 c0 1
1...
1
;
anche questa e invertibile suA.
Le operazioni elementari sulle colonne sono analoghe, ma con moltiplicazio-ne a destra. Percio la matrice ottenuta daH mediante operazioni elementari eequivalente adH; vedremo che, sotto certe condizioni, vale anche il reciproco.

58 Capitolo 3
3.30 Lezione 30
Lemma 3.30.1.SiaA campo d’integrita a ideali principali, e siaM =(
a ba′ b′
),
ad elementi inA; sia d unMCD di a, b, e pongasid = pa + bq, conp, q ∈ A.
PostoV =(
p b/dq −a/d
), la V e invertibile inA, edMV (chee equivalente adM )
ha l’elementod nel posto(1, 1).Dim. L’elemento di posto(1, 1) in MV e ap + bq = d; si ha poidetV =
−pa+bqd = −1. C.V.D.
Siamo ora in grado di dimostrare il seguente risultato fondamentale:Teorema 3.30.2(dei divisori elementari). SiaA come in (3.30.1), e siaM matricem× n ad elementi inA, con, per esempio,n ≤ m; allora M e equivalente inAad una matrice in cui tutti gli elementi sono0 esclusi al piu quelli di posto(i, i)(i = 1, . . . , n), che sono uguali a certiei, con la proprieta cheei+1 e multiplo diei. Tali ei, detti i fattori invariantidi M , sono univocamente determinati a menodi fattori unita diA. Ed anzi,e1e2 · · · ei e unMCD dei minori di ordinei di M .Dim. Per ognia ∈ A non nullo siah(a) il numero dei suoi fattori primi, distintio no; e per una matriceN siah(N) il minimo tra gli h degli elementi non nullidi N . Fra leN equivalenti adM se ne scelga una, per esempioN , il cui h(N)sia minimo; per mezzo di scambi di righe e di colonne si porti al posto(1, 1) unelementoa di N tale cheh(a) = h(N) (si chiami ancoraN la matrice ottenuta).Oraa divide tutti gli elementi della prima riga diN , ed anche tutti quelli dellaprima colonna: che altrimenti, per (3.30.1) (ove la matrice 2 × 2 che vi comparee un pezzo dellaN ), l’a potrebbe essere sostituito con und tale cheh(d) < h(a),e cio mediante moltiplicazione a destra o sinistra per unaV invertibile. Cio visto,con l’operazione elementare3 tutti gli elementi della prima riga e quelli dellaprima colonna, eccetto l’a al posto(1, 1), possono essere fatti diventare0; la N e
ora equivalente alla(
a t00 N1
). Ripetiamo conN1, eccetera, fino ad ottenere la
N ′ =
e1e2
. ..en
0 . . . . . . 0...
...0 . . . . . . 0
.
L’ e1 ea; se esso non dividessee2, e per esempio un loroMCD fossed, la ( e1 e2 )sarebbe equivalente a( e1 e2
e2 ), e questa, per (3.30.1), ad una avented nel posto(1, 1), impossibile; per lo stesso motivoe2 divide e3, ecc. Infine e vero chee1e2 · · · ei e unMCD dei minori di ordinei di N ′; resta da vedere che abbialo stesso ufficio perM . OraM = PN ′Q, edN ′ = P−1MQ−1; l’asserto derivaallora dal seguente teorema di Binet generalizzato, la cui dimostrazione e conse-guenza del (1.6.2):in un prodottoRS di matrici, il minore formato con le righe
Matrici 59
i1, . . . , ir e le colonnej1, . . . , jr e la somma di tutti i prodotti dei minori diRestratti dalle righei1, . . . , ir per i corrispondenti minori diS estratti dalle co-lonnej1, . . . , jr (“corrispondenti” vuol dire che le colonne del primo fattore e lerighe del secondo hanno gli stessi indici). C.V.D.
3.31 Lezione 31
Il Teorema 3.30.2 ci da la forma canonica rispetto all’equivalenza, ed anche permatrici rettangolari; il nome deriva dalla definizione seguente: si scrive ognieiche non sia ne unita ne0 come prodotto di potenze di elementi primi distinti:
ei = ph(i,1)1 p
h(i,2)2 · · · ph(i,s)s ;
dovra essereh(i + 1, j) ≥ h(i, j). Gli elementiph(i,j)j in cui h(i, j) > 0 sono idivisori elementaridi M . Il (3.30.2) stesso ha un’importante conseguenza per gliA-moduli; ci occorre prima ilLemma 3.31.1.SiaA campo d’integrita a ideali principali e siaM unA-modulolibero di ordinem; allora ogni sottomoduloN di M e libero e di ordine≤ m.E inoltre possibile scegliere insiemi liberi di generatorix1, . . . , xm di M edy1, . . . , yn di N tali che yi = eixi, ove0 6= ei ∈ A ed ei divide ei+1; gli eisono univocamente determinati, a meno di fattori che sono unita di A, daM edN .Dim. Primo asserto: per induzione sum, visto che e banalmente vero perm = 1(perche?). Siax1, . . . , xm insieme di generatori liberi diM ; seN ⊆ Ax1 +· · ·+Axm−1, essoN e libero per l’induzione. Se no, l’insieme degliam ∈ A perciascuno dei quali esistono deglia1, . . . , am−1 ∈ A tali che
∑mi=1 aixi ∈ N , e un
ideale(bm) 6= (0) di A. Sianob1, . . . , bm−1 ∈ A tali chey =∑m
i=1 bixi ∈ N .Per ognix ∈ N esiste una ∈ A tale chex−ay ∈ N ∩ (Ax1+ · · ·+Axm−1) (perla proprieta dibm); quindiN e somma diretta dell’A-modulo ora scritto, che perla ricorrenza e libero, e diAy; ne segue cheN e libero ed e ovvio che ha ordine≤ m (se si estende tutto sul corpo quoziente diA, gli ordini diventano dimensionidi spazi vettoriali).
Secondo asserto: e conseguenza immediata del (3.30.2), e della interpreta-zione sugliA-moduli dell’equivalenza fra matrici (lezione 29); notareche gli eidi (3.30.2) che sono uguali a0 vengono buttati via. C.V.D.
La conseguenza importante del Teorema 3.30.2 cui si e accennato e la se-guente:Teorema 3.31.2.SiaA come nel Lemma 3.31.1, e siaM unA-modulo finito; al-lora M e somma diretta diA-moduli ciclici, e piu precisamenteM ∼=
∑iA/eiA,
ove gli ei sono non unita di A ed ei+1 e multiplo di ei. Gli ideali (ei) sonounivocamente determinati da queste condizioni.Dim. SiaM0 l’A-modulo libero finitoAm, ovem e la cardinalita di un insiemedi generatori diM ; sez1, . . . , zm generanoM , l’applicazione diM0 suM che

60 Capitolo 3
manda(a1, a2, . . . , am) sua1z1 + · · ·+ amzm e un omomorfismo diM0 su tuttoM . Quindi M ∼= M0/N per un opportuno sotto-A-moduloN di M0. Sceltein M0 ed N le x, y come nel (3.31.1), si haM0 = Ax1 ⊕ · · · ⊕ Axm, N =Ay1 ⊕ · · · ⊕Ayn = Ae1x1 ⊕ · · · ⊕Aenxn, onde
M ∼= A/Ae1 ⊕ · · ·A/Aen ⊕Axn+1 ⊕ · · · ⊕Axm.
Ma per i > n si haAxi ∼= A = A/0A, ossia si prendeei = 0 per questicasi. Se poi qualcheei (fra i non nulli) e unita diA, lo si butta via perche in talcasoA/Aei = (0); supporremo che non sia stato necessario fare questo, sicche icontinua ad avere i valori1, . . . ,m.
Resta solo da dimostrare l’unicita degliei; osserviamo anzitutto che la sommadegliA/Aei conei 6= 0 (ossia peri = 1, . . . , n) corrisponde al sotto-A-moduloM ′ di M formato dagli elementia torsione, ossia deglix tali cheax = 0 perqualchea 6= 0. TaleM ′ e ovviamente ben determinato, e percio e ben determina-to l’ordine diM/M ′, che e unA-modulo libero, isomorfo alla somma di quelli,fra gli A/Aei, per i qualiei = 0; quindi il numero di questi, ossiam−n, dipendesolo daM . Vediamo ora gliei non nulli; per fare questo si lavorera suM ′, ondepossiamo addirittura supporre cheM = M ′, ossia cheM sia a torsione(il chevuol dire che ogni suo elemento e a torsione). IntantoM ha una certa lunghezzah(M) nel senso del Teorema di Jordan-Holder (2.19 di [AA]): essae la cardina-lita, diminuita di1, di una qualsiasi catena massimale di sotto-A-moduli di M ;si vede subito che, espresso il prodottoe1, . . . , en come prodotto di elementi pri-mi (distinti o no), tale lunghezza e il numero di questi fattori primi [basta tenerepresente che una catena massimale inA/(p1 · · · pr), con i pi primi, e data dagliA/(p1 · · · ps) pers = 1, . . . , r]. Cio comporta subito che seh(M) = 1 esiste ilsoloe1, che esso e primo, e che(e1) e univocamente determinato in quanto esso el’ annullatoredi M (ossia l’insieme deglia ∈ A tali cheax = 0 per ognix ∈ M ).La dimostrazione puo ora farsi per induzione suh: constatato che(en) e l’an-nullatore diM , e che quindi esso e univocamente determinato, siap un divisoreprimo dien, siaP il sotto-A-modulo diM formato daglix ∈ M tali chepx = 0,e pongasiQ = M/P . Sep divide er, . . . , en, ma noner−1, si ha
P ∼=n∑
i=r
(ei/p)
(ei), e Q =
r−1∑
i=1
A
(ei)⊕
n∑
i=r
A
(ei/p).
Poicheh(Q) < h(M), per la ricorrenza gli(ei) (i = 1, . . . , r − 1) e gli (ei/p)(i = r, . . . , n) sono determinati; anche il numeron − r + 1 di questi ultimi edeterminato, percheP e isomorfo alla somma diretta din − r + 1 corpi isomorfiadA/(p). Quindi (e1), . . . , (en) sono determinati. C.V.D.
Notare che, come gia visto nella dimostrazione, il numero di ei che sono nullie l’ordine dell’addendo libero diM .
3.32 Lezione 32
Prima di passare ad altro osserviamo che:

Matrici 61
Lemma 3.32.1.SeA e campo d’integrita euclideo, due matrici ad elementi inAsono equivalenti se, e solo se, sono ottenibili l’una dall’altra mediante operazionielementari.
Dim. In una direzione lo sappiamo gia (lezione 29). Per l’altra direzione, notiamoche tutta la dimostrazione del (3.30.2) puo essere ripetuta per gli euclidei,usandoper h(a) il grado di a nel senso euclideo, e usando in luogo della equivalenzala equivalenza elementare(ossia la trasformabilita l’una nell’altra per mezzo dioperazioni elementari su righe e colonne). Quando si arrivaal punto in cui occorreil Lemma 3.30.1, si ragiona cosı: “che altrimenti uno di questi elementi, nondivisibile pera, potrebbe essere sostituito, con la operazione elementare3, colresto della propria divisione pera; e cio contro l’ipotesi suh(a)”. Tutto il resto filaliscio. Si conclude che una matrice ha la stessa forma canonica per equivalenza oper equivalenza elementare; percio i due tipi di equivalenza coincidono. C.V.D.
Una famosa applicazione del (3.31.2):
Teorema 3.32.2.Ogni gruppo abeliano finitoe somma diretta di gruppi ciclici;resta vero se si sostituisce “finito” con “finitamente generato”.
(Dimostrarlo per esercizio).
Ed ora passiamo al terzo ed ultimo tipo di equivalenza fra matrici, quella datadaM ′ = PMP−1 (su un corpoC), conP nonsingolare; le matriciM ,M ′ diconsisimili; e il tipo di equivalenza che si trova come risposta alla domanda: sotto qualicondizioniM edM ′ rappresentano lo stesso elemento di EndCV rispetto a basidiverse? (V e uno spazio vettoriale suC, di dimensionen). Anche la simiglianzae riconducibile a dei moduli: siax una indeterminata suC, pongasiK = C[x], esi costruisca unK-modulo il cui supporto (=insieme dei suoi elementi) e ancoraV , e che quindi verra ancora indicato conV , nel modo seguente: fissato unα ∈EndCV , si porra(f(x))v = (f(α))v per v ∈ V e perf(x) ∈ K; la f(α) haun ovvio significato. Si noti che la definizione precedente ein accordo con lamoltiplicazione scalare nello spazio vettorialeV .
Il Teorema 3.31.2 assicura che esistonovr, . . . , vn ∈ V , con r ≥ 1, talicheV sia la somma diretta deiKvi, e che l’annullatore divi sia l’ideale diKgenerato da un certoei = ei(x), di grado positivo nellax, e tale cheei dividaei+1 perr ≤ i < n. Vi e dell’arbitrarieta nella scelta degliei, ma la elimineremocol richiedere che essi siano polinomi monici (nessuno di essi e nullo percheVe spazio vettoriale di dimensione finita suC, e quindi non contiene sottospaziisomorfi aK).
L’ en e particolarmente importante; infattien(α)vi = 0 per ognii, onde (datoche gliαjvi generanoV suC) ancheen(α)v = 0 per ogniv ∈ V , siccheen(α) =0. D’altra parte, sef(x) ∈ K e tale chef(α) = 0, daf(α)vn = 0 segue chef(x)e multiplo dien(x); percioen(x) e il generatore monico dell’ideale formato daglif(x) ∈ C[x] tali chef(α) = 0; e detto ilpolinomio minimo, o funzione minima,di α [che esso dovesse esistere lo si sapeva a priori, perche fragli 1, α, α2, α3, . . .ce n’e al massimon2 di linearmente indipendenti suC].
62 Capitolo 3
3.33 Lezione 33
Continuando, suppongasi che un certoei(x), che chiameremoe(x) per risparmia-re indici, sia della forma
(3.33.1) e(x) = xs − as−1xs−1 − · · · − a0 (s dovrebbe esseresi);
le αjvh (h = r, . . . , n; j = 0, 1, . . . , s − 1) formano una base diV suC; datocheα trasforma ogniKvh in se, la matriceB associata adα per mezzo di quellabase e formata di blocchi:
B =
Br
Br+1
.. .Bn
,
ove il bloccoBi (sempre lai che si era tralasciato di scrivere) e dato daBi = (bhj),con α(αj−1vi) =
∑sh=1 bhj(α
h−1vi); questa dabhj = 0 eccetto che nei casiseguenti:bj+1,j = 1 sej < s; bhs = ah−1. Visualmente:
(3.33.2) Bi =
0 . . . 0 a01 a1
. . ....
1 as−1
, ovveroBi = a0 ses = 1.
La matrice (3.33.2) si chiama lacompagnadel polinomio (3.33.1). Prima di con-cludere prendiamo la matricex−Bi e ne cerchiamo i fattori invarianti inK; il cri-terio enunciato alla fine del Teorema 3.30.2 dice che essi sono 1, 1, . . . , 1,det(x−Bi) = ei(x). Quindi i fattori invarianti dix−B, inK, sono1, . . . , 1, er(x), . . . , en(x)(tanti quanti ne occorrono per averen fattori invarianti). LaB e la matrice associa-ta adα mediante una certa base speciale diV (laαjvh); in un altra base qualsiasi,α avra una certa matriceM , simile aB: B = P−1MP ; le matricix−M , x−Bsono legate dax − B = P−1(x −M)P , e sono percio equivalenti suK; ne se-gue che gli1, . . . , 1, er(x), . . . , en(x) sono anche i fattori invarianti dix − M ,cosicche abbiamo dimostrato che ogni matriceM ad elementi inC e simile, suC, ad unaB del tipo descritto, costruita con le compagne dei fattori invarianti 6= 1dellax−M suK. PertantoM edM ′ sono simili se, e solo se, hanno la stessaB,e quindi se, e solo se,x−M , x−M ′ sono equivalenti suK. Morale:Teorema 3.33.3(il cui ultimo asserto e il Teorema di Frobenius). Due matriciM ,M ′, quadrate di ordinen ad elementi nel corpoC, sono simili inC se, e solo se,le x − M , x − M ′ sono equivalenti inC[x], x essendo una indeterminata. Seer(x), . . . , en(x) sono i fattori invarianti monici diversi da1 di x −M in C[x],la M e simile inC ad una matrice fatta di blocchi sulla diagonale, tali blocchiessendo le matrici compagne degliei(x). Infine,en(x) e il polinomio minimo diM , ed e uguale al rapporto fradet(x − M) ed il MCD in C[x] dei minori diordinen− 1 di x−M .
La matrice simile aB, fatta con le compagne, dicesi laforma canonica diJordandi B, ed e unica (si intende, forma canonica per simiglianza).

Matrici 63
3.34 Lezione 34
La forma canonica di Jordan ha l’inconveniente (psicologico) che matrici diago-nali possono benissimo avere forme canoniche non diagonali(trovarne qualcunaper esercizio). Si ovvia a questo inconveniente per mezzo dialtre forme canoni-che che ora descriveremo. Osserviamo dapprima che sef(x), g(x) sono polinomimonici primi fra loro, con le matrici compagneF , G, la matrice
(F 00 G
)ha come
fattori invarianti una sfilza di numeri1, edfg (lo si vede col MCD dei minori;per accettata improprieta di linguaggio si parla talvoltadei “fattori invarianti dellamatriceM ” intendendo in realta i “fattori invarianti della matricex−M ”); percioessa e simile alla compagna difg. Questo, ed il (3.33.3), danno subito:
Corollario 3.34.1.Notazioni come nel Teorema 3.33.3; alloraB e simile ad unamatrice fatta di blocchi diagonali, tali blocchi essendo lematrici compagne deidivisori elementari dix−B in C[x].
Anche questa e una forma canonica per simiglianza (senza nome). Sia infinef(x) monico irriducibile, e siaF la sua compagna; siaN una matrice quadrata,di ordine r uguale a quello diF , ossia al grado dif , i cui elementi siano tutti0, eccetto quello della prima riga ed ultima colonna, che e1; seh e un interopositivo, pongasi
G =
F 0 . . . . . . 0
N F. . .
...
0.. .
. . .. . .
......
.. . . . . . . . 00 . . . 0 N F
,
conh blocchi uguali adF edh − 1 uguali adN . In G c’e una fila ininterrotta dinumeri1 subito sotto la diagonale principale; quindi i fattori invarianti di x−G,eccetto l’ultimo, sono1; l’ultimo e det(x−G) = (det(x−F ))h = f(x)h. PercioG e simile alla matrice compagna difh, e si chiama laipercompagnadi fh. Il(3.34.1) da ora:
Corollario 3.34.2.Notazioni come nel Teorema 3.33.3; alloraB e simile ad unamatrice fatta di blocchi diagonali, tali blocchi essendo lematrici ipercompagnedei divisori elementari dix−B in C[x].
Questa forma canonica dicesi laforma canonica razionale, e dipende in modoessenziale daC (anche la precedente): si nota infatti che seC ′ e prolungamento2
di C, i fattori invarianti diC sono gli stessi se computati inC[x] o C ′[x]; ma idivisori elementari cambiano.
2Per Barsotti il termine “prolungamento” e sinonimo di “estensione”, ovvero qui si dice cheC′
e un corpo che contieneC come sottocorpo. [NdR]

64 Capitolo 3
Vediamo un’altra cosa; data laM quadrata di ordinen ad elementi inC, ildet(x−M) = g(x) non cambia seM viene sostituita con una simile:
det(x− P−1MP ) = det(P−1(x−M)P
)=
= (detP−1)(det(x−M))(detP ) = det(x−M).
Se alloraB e la forma canonica di Jordan diM , e see1(x), . . . , en(x) sono ifattori invarianti dix−M in C[x], si ha
(3.34.3) g(x) = det(x−M) = det(x−B) = e1(x) · · · en(x).
Il polinomio g(x) ora introdotto si chiama ilpolinomio caratteristico(o fun-zione caratteristicadi M ; ricordando cheen(x) era il polinomo minimo, e che glialtri ei(x) dividonoen(x), si vede che
3.34.4.Il polinomio caratteristicoe multiplo del polinomio minimo, ma ne hagli stessi fattori primi, eventualmente con esponenti maggiori. Sen e l’ordinedella matrice, il coefficiente di(−1)iXn−i nel polinomio caratteristico uguagliala somma dei minori principali di ordinei della matrice (peri = 1 tale sommaela traccia della matrice).
Osservando cheen(M) = 0 se ne deduceg(M) = 0, donde il famoso:
Teorema 3.34.5(di Hamilton-Cayley). Siag(x) il polinomio caratteristico di unamatriceM (quadrata ad elementi in un corpo). Allorag(M) = 0.
Domande:g(x), seC e algebricamente chiuso, ha gian zeri inC, sen e ilsuo grado; come la mettiamo l’aver trovato un altro zero, ossia M? Perche non sipoteva dimostrare il (3.34.5) dicendo semplicemente cheg(M) = [g(x)]x=M =[detx−M ]x=M = det(M−M) = 0? Si puo definire il polinomio caratteristicodi unα ∈ EndCV ?
3.35 Lezione 35
La “equazione”g(x) = 0 si chiama l’equazione secolaredi M ; il nome e dovutoal fatto che fu notata per la prima volta nel problema di sapere come mai l’effettocombinato di tutti i pianeti del sole su uno di essi e di farneavanzare il perieliodi un piccolo angolo ogni secolo. Le sue radici inC, ossia gli zeri dig(x) in C,si chiamano gliautovalori, o radici caratteristiche, di M in C (o di α ∈ EndCVseα e associata adM ); i v ∈ V tali cheαv = cv per qualchec ∈ C, ovvero
gli y =
(y1...yn
), conyi ∈ C, tali cheMy = cy, diconsi gliautovettorio vettori
caratteristicidi α, o diM ; la condizione da(c−M)y = 0 ondedet(c−M) = 0,g(c) = 0, sicchec e autovalore (si intende, sev o y e non nullo); viceversa, sec eautovalore la(c −M)y = 0 ha soluzioniy 6= 0. Quindi ad ogni autovalore sonoassociati degli autovettori non nulli; meglio ancora:

Matrici 65
Lemma 3.35.1.Lo spazio vettorialeVc suC degli autovettoriy di M tali cheMy = cy per un datoc, ha dimensione positiva se, e solo se,c e autovalore diM .
Lavorando non sux−M , ma sulla matrice diagonale i cui elementi diagonalisono i fattori invarianti dix−M , il (3.35.1) puo essere cosı precisato (ricordiamoche la nullita di una matrice quadrata e la differenza tra l’ordine e la caratteristica):Teorema 3.35.2.Notazioni come nel Lemma 3.35.1, e sianoei(x) i fattori inva-rianti di x−M ; allora
dimVc = [nullita di c−M ] =
= [numero degliei(x) che hannoc come zero] ≤≤ [molteplicita di c come zero del polinomio caratteristico diM ].
La somma deiVc e diretta, come si vede dal seguente:Teorema 3.35.3.Autovettori non nulli appartenenti ad autovalori distintisonolinearmente indipendenti; se la matricee simmetrica, essi sono a due a dueortogonali (ossiay∗1y2 = 0).Dim. SiaMyi = ciyi, con ici diversi a 2 a 2; se
∑ri=1 aiyi = 0, moltiplicando a
sinistra perM,M2, . . . ,M r−1 si ottiene∑r
i=1 aicjiyi = 0 perj = 0, . . . , r − 1.
La matrice dei coefficienti delleaiyi, ossia la
1 1 . . . . . . 1c1 c2 crc21 c22 c2r...
...cr−11 cr−1
2 . . . . . . cr−1r
,
e non degenere perche il suo determinante e ildeterminante di VandermondeV (c1, . . . , cr), che vale
∏1≤i<j≤r(cj − ci) 6= 0 (dimostrarlo per esercizio, e
se non ci si riesce, vedere la dimostrazione alla fine della lezione 37). Quindiaiyi = 0, ossiaai = 0, e ley1, . . . , yr sono linearmente indipendenti.
Per l’ortogonalita
c2y∗1y2 = y∗1My2 = (y∗1My2)
∗ = y∗2My1 = c1y∗2y1 = c1y
∗1y2,
ondey∗1y2 = 0. C.V.D.
Il (3.35.3) parte prima, applicato ad unα ∈ EndCV , ha un significato evi-dente; la parte seconda no, perche non e chiaro cosa vogliadire “ortogonali” senon e stata data una norma (e d’altro canto non e neanche chiaro che cosa vogliadire “simmetrica”). Il suo significato e il seguente:Corollario 3.35.4.Seα ∈ EndCV , e se e una qualsiasi norma suV tale che ri-spetto ad essaα∗ = α, e sev1, v2 sono autovettori diα appartenenti ad autovaloridistinti, allora v1 v2 = 0.Dim. Praticamente la stessa. C.V.D.

66 Capitolo 3
3.36 Lezione 36
Sfruttiamo i risultati precedenti:Teorema 3.36.1.SiaM matrice quadrata di ordinen ad elementi nel corpoC; iseguenti asserti sono equivalenti:
1. M e simile. inC, ad una matrice diagonale;2. M possieden autovettori linearmente indipendenti suC;3. Il polinomio minimo diM suC e prodotto di fattori lineari distinti;4. Per ogni autovalorec ∈ C, la sua molteplicita come zero del polinomio carat-
teristico diM uguaglia la nullita di c − M , e la somma di tali molteplicita en.
Se le condizioni sono soddisfatte, gli elementi diagonali,nella matrice diagonalesimile alla data, sono gli autovalori, ciascuno ripetuto tante volte quanta nee lamolteplicita descritta al punto4.Dim. L’asserto non numerato discende dal fatto che il polinomio caratteristiconon cambia nella relazione di simiglianza. Per i numerati:1 ⇒ 2 ovvio: gli
autovettori di una diagonale sono i
0...010...0
; 2 ⇒ 4 discende da (3.35.2); idem per
4 ⇒ 2. Il (3.35.2) col (3.33.3), da anche4 ⇔ 3; infine, 3 ⇒ 1 discende da(3.34.1). C.V.D.
Un ultimo tipo di equivalenza: due matrici quadrateM , M ′ ad elementi inun corpo sonoortogonalmente similisu quel corpo seM ′ = P−1MP , conPortogonale (cfr. lezione 11) e ad elementi in quel corpo; e una relazione di equi-valenza. E chiaro che seM e ortogonalmente simile ad una matrice diagonale,M deve essere simmetrica; e anche chiaro che due matrici ortogonalmente similisono simili ed anche congruenti. Cio premesso, si ha:Teorema 3.36.2.SiaM matrice simmetrica di ordinen ad elementi in un cor-po C di caratteristica 6= 2, e tale che in esso ogni somma din quadrati sia unquadrato. Se alloraM e simile, inC, ad una matrice diagonaleD, essae ancheortogonalmente simile, inC, aD.Dim. Nello spazio vettoriale numerico di dimensionen suC (che e poi quello dibasev1, . . . , vn con
vi =
0...010...0
(i− esima componente),
M e matrice di un endomorfismoα; i vi sono ortonormali nella solita normavw = v∗w. SeM e simile alla diagonaleD, per il2 di (3.36.1)α han autovettori

Matrici 67
w1, . . . , wn che formano una base, e che sono ortogonali per (3.35.3). Se in Cogni somma din quadrati e un quadrato, iwi possono essere scelti normalizzati(cfr. 1.11.3), sicchew1, . . . , wn e base ortonormale. Ma allora la matrice chetrasforma la basev nella w e ortogonale, ed essa trasforma per simiglianzaMnellaD. C.V.D.
Corollario 3.36.3.SiaC un corpo ordinato, tale che in esso la somma din qua-drati sia un quadrato, e cheC[
√−1] sia algebricamente chiuso. Allora ogni
matrice simmetrica di ordinen ad elementi inC e ortogonalmente simile, inC,ad una diagonale.Dim. Per (3.36.1) e (3.36.2) basta dimostrare che il polinomio minimo f(x)della matrice simmetricaM e prodotto di fattori lineari distinti inC[x]. SeK = C[
√−1], quel polinomio minimo e certamente prodotto di fattori lineari
in K[x], tali fattori essendox − a, cona autovalore diM in K. Occorre dimo-strare che questia sono veramente inC, e che sono distinti. Se si indica con unasbarra superiore il coniugato di un elemento diK suC, o anche di una matrice,daMy = ay (y essendo autovalore non nullo) si ricavay∗My = ay∗y. Pren-dendo il trasposto coniugato di ambo i membri, e ricordando cheM∗ = M , se nededuceay∗y = ay∗y; ma y∗y =
∑i yiyi, ed ogniyiyi e somma di due quadrati
di elementi diC. Quindi y∗y 6= 0, eda ∈ C, come si voleva.Ora occorre vedere che non ci possono essere fattori lineariripetuti. Sup-
pongasi chef(x) = (x − a)2h(x), e pongasik(x) = (x − a)h(x); allorak(x)2 = f(x)h(x), k(M)2 = f(M)h(M) = 0. Ma N = k(M) e simmetri-ca, ha elementi inC, ed e non nulla, dato chek(x) ha grado minore del grado dif(x); quindi gli elementi della diagonale diN2 sono somme di quadrati di ele-menti diC, ed almeno in un caso questi elementi sono non tutti nulli. NeseguecheN2 6= 0, contraddizione C.V.D.
3.37 Lezione 37
Lemma 3.37.1.SiaM matrice quadrata di ordinen ad elementi nel corpoC; siax indeterminata, e siah(x) ∈ C[x]; ser1, . . . , rn sono le radici caratteristiche diM , supposte inC, e ciascuna comparente tante volte quante nee la molteplicita,si hadeth(M) = h(r1) · · · h(rn).Dim. Si prolunghiC in un corpoK tale cheh(x) = k(s1 − x) · · · (sq − x), conk ∈ C edsi ∈ K; allorah(M) = k(s1 − M) · · · (sq − M), ondedet h(M) =kn∏
i det(si −M) = kn∏
ij(si − rj) =∏
j h(rj), come voluto; ora ilK nonserve piu. C.V.D.
Teorema 3.37.2.Notazioni come nel Lemma 3.37.1; allora le radici caratteristi-che dih(M) sono leh(r1), . . . , h(rn).Dim. Siay un’altra indeterminata, e si pongap(x) = y−h(x) ∈ (C(y))[x]; si hap(M) = y − h(M), onde il (3.37.1), applicato ap(x), da che
det(y − h(M)) = det p(M) =∏
i
p(ri) =∏
i
(y − h(ri));

68 Capitolo 3
madet(y − h(M)) e il polinomio caratteristico dih(M). C.V.D.
Come promesso nella lezione 35, ecco la dimostrazione del Teorema di Van-dermonde: aggiungendo allai-esima riga (i > 1) la (i − 1)-esima moltiplicataper−c1, il determinante non cambia; d’altra parte la prima colonnadella nuovamatrice consta di un1 nel posto(1, 1), e di0 altrove. Cancellandovi prima riga eprima colonna, la matrice che resta ha la colonnai-esima divisibile perci+1 − c1;eseguita la divisione, resta la matrice di Vandermonde delle c2, . . . , cr, sicche
V (c1, . . . , cr) = (c2 − c1)(c3 − c1) · · · (cr − c1)V (c2, . . . , cr);
ne discende per induzione il valore usato nella dimostrazione del Teorema 3.35.3.

4Quadriche
4.38 Lezione 38
In questa parte lavoreremo sempre in spazi proiettivi; sarebbe pesante mantenerein piena forza la nomenclatura della seconda parte; adotteremo invece la nomen-clatura piu familiare nella quale “spazio proiettivo” significa “spazio proiettivopunteggiato”, e cioe l’insieme dei suoi punti; con cio le parole ‘retta”, “piano”,ecc. vengono ad indicare dei sottospazi, e non degli elementi di dimensione supe-riore [questo cambiamento di nomenclatura non e totalmente senza conseguenze;cfr. lezione 38bis].
Sia dunqueSn uno spazio proiettivo sul corpoC, che in questa lezione sup-poniamo algebricamente chiuso; scelto un sistema di riferimento inSn, un puntoP e assegnato col daren+1 elementip0, . . . , pn ∈ C, non tutti nulli, e determinatia meno di un fattore non nullo inC; lo chiameremo spesso il punto(p0, . . . , pn),o semplicementep; qui non occorre porre lepi in colonna e considerarle comeformanti una matrice(n+ 1)× 1, ma non e vietato farlo.
Sianox0, . . . , xn indeterminate suC; un sottoinsiemeU di S e unavarieta(algebrica) suC se esiste un numero finito di formef1(x), . . . , fr(x) ∈ C[x]tali che: p ∈ U se, e solo se,fj(p) = 0 per j = 1, . . . , r; naturalmentefj(p)significafj(p0, . . . , pn). Notare che l’esserefj forme garantisce che questa siauna buona definizione, in quanto sefj(p) = 0, anchefj(cp) = 0 per c ∈ C.Per brevita diremo (arcaicamente) che lefi(x) = 0 sono leequazioni diU , mateniamo bene in mente che lefi(x) si guardano bene dall’essere= 0, e che sonole fi(p) perp ∈ U che sono= 0. La locuzione “le equazioni diU ” non comportacheU determini univocamente le proprie equazioni: per esempio,la f2 puo esseresostituita conf r
2 + f s1 (r, s esponenti interi positivi) senza cambiareU . Spesso
diremo anche, per descrivere quanto precede, “sianox0, . . . , xn un sistema dicoordinate proiettive suSn”; e infatti chiaro che, una volta fissate lexi, un puntoP di coordinatep0, . . . , pn puo essere identificato con l’omomorfismo diC[x] suC che mandaxi supi (e con gli omomorfismi ad esso proporzionali); quindipi e ilvalore assunto daxi in P (sempre a meno di un fattore non nullo), e sara indicatoconxi(P ).
Esempi 1. 1. Il vuoto e una varieta: le sue equazioni sono, per esempio, x0 =0, . . . , xn = 0; oppure anche1 = 0.

70 Capitolo 4
2. Ogni puntoP e una varieta: le sue equazioni sonop0xi − pix0 (i =1, . . . , n), se per esempiop0 6= 0.
3. Ogni iperpiano e una varieta: la sua equazione e laa0x0+ · · ·+anxn = 0che e stata appunto chiamata l’equazione dell’iperpiano nella lezione 24.
4. Sn e una varieta: la sua equazione e0 = 0 (unico caso in cui il primomembro e sul serio zero).
5. L’intersezione di due (e quindi di un numero finito) di varieta e una varieta:sefi(x) = 0 e gj(x) = 0 sono rispettivamente le equazioni delle due varieta,quelle dell’intersezione sonofi(x) = gj(x) = 0.
6. Da 5 e 3 segue che ogni sottospazio diSn e varieta, le cui equazionipossono essere prese tutte lineari; si chiamanovarieta lineari.
7. L’unione di due (e quindi di un numero finito di) varieta euna varieta: sefi(x) = 0 e gi(x) = 0 sono rispettivamente le equazioni delle due varieta, quelledell’unione sonofi(x)gj(x) = 0.
Sarebbe tentante dire che seF e applicazione proiettiva diSn suSm, eU evarieta diSn, alloraFU e una varieta diSm; peccato che sia falso!E pero vero incerti casi importanti; prima di esporli, una osservazione ed una definizione.
L’osservazione e che se una varietaU contiene infiniti punti di una rettaR,deve contenere tutti i punti diR: infatti, intantoU ∩R e una varieta inR; sey0, y1e un sistema di coordinate proiettive suR, sianofi(y) = 0 le equazioni diU ∩R.Fattoy0 = 1, le fi(1, y1) = 0 sono soddisfatte da infiniti valori diy1, sicche iprimi membri sono0; ma allora, per l’omogeneita,fi(y0, y1) = 0, edU ∩R = R.
La definizione e la seguente: siaU varieta; laU e unconose esiste un puntoP ∈ U tale che: per ogniQ ∈ U , diverso daP , ogni punto della rettaP + Qappartiene adU . Un P siffatto dicesi “appartenente al vertice diU ”. SeP eP ′
appartengono al vertice, ogni punto diP + P ′ e suU ; se poiQ 6= P,P ′, ognipunto diP +Q e diP ′+Q appartiene adU ; ma allora ogni punto diP +P ′+Qappartiene adU , sicche ogni punto diP + P ′ appartiene al vertice. Si vede cosıche l’insieme dei punti appartenenti al vertice diU e un sottospazio diSn detto ilverticedi U . Ora si ha:
Teorema 4.38.1.SiaU varieta diSn e siaF una proiettivita diSn su unS′n; allo-
ra FU e varieta di S′n. Sia inveceU varieta di unSm ⊂ Sn, e siaSr sottospazio
di Sn sghembo adSm; sia F la proiezione diSn di centroSr, e siaV l’insiemedeiP ∈ Sn ciascuno dei quali appartiene a qualche punto diFU (ricordare chei punti di FU sono degliSr+1). Allora V e un cono, il cui vertice contieneSr.
Dim. Per il primo asserto: sianox0, . . . , xn e y0, . . . , yn sistemi di coor-dinate proiettive suSn, S′
n rispettivamente, e siaxi =∑
j aijyj un’applica-zione lineare soprastante adF . SianofS(x) = 0 le equazioni diU ; allorafS(. . . ,
∑j aijyj, . . . ) = 0 sono quelle diFU , siccheFU e varieta.
Per il secondo asserto: scelgasi un sistema di coordinate proiettivex0, . . . , xntale che le equazioni diSm sianoxm+1 = · · · = xn = 0, e che quelle diSr sianox0 = · · · = xn−r−1 = 0. SefS(x0, . . . , xm) = 0 sono le equazioni diU ,queste stesse sono le equazioni diFU , visto che lex0, . . . , xn−r−1 sono anche unsistema di coordinate proiettive sulla stellaSn/Sr (en − r − 1 ≥ m percheSr,

Quadriche 71
Sm sono sghembi). Un punto diFU e unSr+1 le cui equazioni sono quelle cheesprimono essere lex0, . . . , xn−r−1 proporzionali a certex0, . . . , xn−r−1 ∈ Cche soddisfano lefS(x) = 0; in altre parole, queste stesse equazioni sono leequazioni diV . Che poiV sia cono il cui vertice contieneSr e palese. C.V.D.
4.38 Lezione 38bis
Questa lezione e per chi desideri approfondire un po’ le motivazioni di certe de-finizioni; non e necessaria per la comprensione del resto del corso o per l’esame.Intanto, un controesempio all’essereFU varieta: nel pianoS2 fissiamo un sistemadi riferimentoP0, P1, P2, (Q punto unita); sianox0, x1, x2 le relative coordinateproiettive. SiaS1 la retta proiettivaP0 + P1; su questa si fissi il sistema di riferi-mentoP0, P1, (punto unitaQ′ = proiezione diQ daP2 suS1), e sianoy0, y1 lerelative coordinate proiettive (l’equazione diS1 ex2 = 0).
P1
P2
P0
x1 = 0x0 = 0
x2 = 0
Q
Q′
U
S1
LaU sia la varieta di equazionex0x2 − x21 = 0; siaF l’applicazione proiettiva diS2 suS1 che consiste nel proiettareS2 daP2 suS1; allora unaFV soprastante adFS = F e data da
(4.38bis.1) y0 = x0, y1 = x1;
sex = (x0, x1, x2) percorreU , ossiax0x2 − x21 = 0, l’y = Fx percorre tutti ipunti(y0, y1) di S1 per ciascuno dei quali esiste un puntox tale chey0x2−y21 = 0.Fra questi punti non c’e punto(0, 1) = P1, ma ci sono tutti gli altri, siccheFU etuttoS1 eccettoP1; questo insieme si e visto non essere una varieta. Cio mostrache la definizione di “applicazione proiettiva” andava beneper gli spazi proiettividefiniti a suo tempo, ma non per gli spazi proiettivi punteggiati che usiamo ora;ed il perche si puo vedere con un esame approfondito dei motivi delle definizioni:una applicazione di un insiemeV su unoW e un certo sottoinsieme diV ×W ; seV , W hanno certe ulteriori strutture, le applicazioni piu sensate sono quelle chepartecipano di quelle strutture; cosı, seV , W sono spazi vettoriali,V ×W diventaanch’esso uno spazio vettoriale se lo si indica conV ⊕W ; ed ora un sottoinsiemeFV di V ⊕ W e applicazione lineare se, fra l’altro, e sottospazio vettoriale diV ⊕W . Passiamo agli spazi proiettiviS = [V ], T = [W ]; intanto[V ⊕W ] non e

72 Capitolo 4
in corrispondenza biunivoca conS × T , ma perlomeno contiene un sottoinsieme(quello deiV ′ ⊕ W ′, conV ′, W ′ sottospazi diV , W ) che e in corrispondenzabiunivoca conS × T ; identifichiamolo conS × T . Ora l’intersezione diS ×T con [FV ] e cio che abbiamo chiamatoFS , e la definizione funzionava beneperche questoFS e appunto un sottoinsieme diS × T , ed e quanto di piu vicinoad uno spazio proiettivo si possa acchiappare. Ma seS, T vengono interpretaticome spazi proiettivi punteggiati, tutto questo cade, perche seP e punto diSappartenente al nucleo diFS , l’elemento del vecchioS × T la cui pr1 e P eP × (vuoto diT ), e questo non e un elemento del nuovoS × T .
Quindi, per dare una definizione sensata di applicazione proiettiva (che peroricevera il nome diapplicazione razionale lineare) per spazi proiettivi punteggiatioccorre trovare qualcosa di familiare che rappresenti l’S × T ; torniamo aV eW : ora S = [V ]1 e T = [W ]1, ove l’indice 1 vuol dire che si consideranosolo i sottospazi di dimensione1. Il [V ⊕ W ]1 non ha nessun sottoinsieme incorrispondenza biunivoca canonica con[V ]1× [W ]1; se pero si costruisceV ⊗W(prodotto tensoriale, [AA] lezione 49), ecco che[V ⊗ W ]1 intanto e uno spazioproiettivo punteggiato, e poi contiene il sottoinsieme dei〈v ⊗ w〉 (v ∈ V ,w ∈ W ,entrambi6= 0), che e appunto in corrispondenza biunivoca conS×T , e che quindisara indicato conS × T . Ed anzi, questo sottoinsieme e una varieta di[V ⊗W ]1;dimostrazione: seV e identificato con le matrici(n + 1) × 1 di elementi diC,eW con le matrici1 × (m + 1), V ⊗ W puo essere identificato con le matrici(n+ 1)× (m+ 1), ed anzi,v ⊗ w con la matricevw. Si tratta di vedere quandouna matrice di tipo(n + 1) × (m + 1) sia un prodottovw; la risposta (esercizio,e comunque ci torneremo in seguito) e “quando abbia caratteristica≤ 1”, sicchele equazioni diS × T non sono altro che i minori di ordine2 eguagliati a0.Piu precisamente: partiamo da unS(n+1)(m+1)−1 un cui sistema di coordinateproiettive scriviamo con due indici:zij, i = 0, . . . , n; j = 0, . . . ,m; le equazionizijzrs−zrjzis = 0 danno una varieta in corrispondenza biunivoca con unSn×Sm
(dettavarieta di Segre, o prodotto alla Segredi Sn edSm).Ora che siamo riusciti a vedereS × T come qualcosa che ha senso nella
teoria che abbiamo in esame, e facile stabilire chi debba essereFS : l’FV eraun sottoinsieme diV × W ; l’immagine diFV in V ⊗ W genera (ma non e) unsottospazio vettoriale diV ⊗ W , diciamoF ′; e l’[F ′] ∩ (S × T ) e cio che oravogliamo chiamareFS .
Vediamo sull’esempio precedente come questoFS differisca da quello usatoprima; nell’esempioS eraS2, T eraS1; S × T e la varieta (nell’S5 di coordinateproiettivezij , i = 0, 1, 2; j = 0, 1) formata dai pnti di coordinatezij = xiyj,
conx, y punti diS, T rispettivamente;F ′ e generato da tutti gli(
x0x1x2
)( y0 y1 ) =
( x0y0 x0y1x1y0 x1y1x2y0 x2y1
), onde[F ′] ha equazionez01 − z10 = 0. L’intersezione conS × T
produce percio l’equazione
(4.38bis.2) x0y1 − x1y0 = 0.
Ecco che ora il punto incriminato(0, 1) = P1 di T proviene, secondoFS , da tuttii punti (0, x1, x2) di S; e fra questi vi e ilP2 = (0, 0, 1) di U . Nella vecchiaFS
Quadriche 73
taleP2 era il centro, e corrispondeva percio al vuoto diT (ed e per questo cheP1
mancava fra le immagini di punti).Un’analisi ulteriore rivela che
1. La vecchiaFS esprime, algebricamente, una eguaglianza fra certixi edyi (la4.38bis.1); geometricamente esprime che:FSP e l’intersezione diS1 conP2 +P ;
2. Il nuovoFS esprime, algebricamente, una proporzionalita fra certixi e certiyi(la 4.38bis.2); geometricamente esprime che:P eP ′ si corrispondono inFS seP2, P , P ′ sono allineati.
3. Se si analizza ulteriormente l’intersezione di[F ′] non conS×T , ma conU×T(che e quella che conta), si vede che essa e unione delle dueseguenti varietaD1
eD2: laD1 = P2×T e la corrispondenza fraU eT che fa corrispondereP2 ∈U ad ogni punto diT ; inveceD2 ha equazioniy0x1−x0y1 = 0, y0x2−x1y1 =0, e naturalmentex0x2−x21 = 0: ad ogniP ∈ U , diverso daP2 fa corrispondereFSP (in qualunque interpretazione diFS); ed aP2 fa corrispondereP1 soltanto.
Daro ora, senza dimostrazione, la seguente informazione:
Teorema 4.38bis.3.Per ogni applicazione razionale lineare, il corrispondente diuna varieta e una varieta.
Notare che le applicazioni razionali lineari sono corrispondenze, ma non ne-cessariamente applicazioni nel vero senso della parola, perche ad un punto delprimo spazio possono far corrispondere piu di un punto del secondo; e un prezzoche si deve pagare per evitare i maggiori inconvenienti illustrati.
4.39 Lezione 39
C continua ad essere algebricamente chiuso. Una varietaU e unaipersuperficie(curva per n = 2, superficieper n = 3; le parole superficie e ipersuperficierestano invariate al plurale, anche se ormai sono solo i matematici a saperlo; laparola “specie” e stata piu fortunata, e soltanto la rai osa dire “speci”1) se puoessere definita con una sola equazione; ed in questa espressione includiamo laequazione1 = 0 (che da laipersuperficie vuota) ma non la0 = 0 (che darebbetutto lo spazio, non considerato ipersuperficie). Vorrei anche avvertire, a scanso diequivoci, che mentre la parola ipersuperficie descrive una proprieta di una varietarispetto allo spazio in cui e immersa, le parole curva e superficie, che qui vengonosate come sinonimi di ipersuperficie in casi speciali, descrivano in realta, in unateoria piu generale che non svolgiamo, delle proprieta divarieta indipendenti dallospazio in cui sono immerse.
Una varieta eirriducibile se non e unione di due sue sottovarieta proprie(sottovarieta vuol proprio dire varieta che sia anche sottoinsieme).
1...all’epoca non esistevano ancora le emittenti private. [NdR]

74 Capitolo 4
Lemma 4.39.1.Una ipersuperficieU di equazionef(x) = 0, conf(x) irridu-cibile, e irriducibile; inoltre f(x) genera l’ideale diC[x] formato da tutti ig(x)aventi la proprieta cheg(x(P )) = 0 per ogniP ∈ U .
Dim. Sia M quell’ideale (che sia un ideale non c’e dubbio); supponiamo poiche f(x) contenga veramente tuttex0, . . . , xn con grado positivo (se cosı nonfosse, basterebbe applicare una sostituzione lineare invertibile di indeterminateper ottenere che cosı fosse). Se0 6= g(x) ∈ M , dico cheg(x) ha la stessaproprieta; se infattig(x) ∈ C[x0, . . . , xn−1], sianop0, . . . , pn−1 ∈ C arbitrari,ma non tutti nulli, e siapn ∈ C tale chef(p) = 0; questopn esiste percheC ealgebricamente chiuso ef(p0, . . . , pn−1, xn) ∈ C[xn] ha grado positivo2. Allorap ∈ U , ondeg(p0, . . . , pn−1) = 0. Essendop0, . . . , pn−1 arbitrari, questo dag(x) = 0, contro l’ipotesi.
Cio premesso, siag(x) elemento diM di grado minimo nellaxn; questogrado, sia essos, e certo> 0 per quanto visto. Considerandof eg come elementidi C(x0, . . . , xn−1)[xn], si puo divideref perg: f = gq′+ r′, over′ = 0, ovveror′ ha inxn grado< s. Eliminando il denominatore comuneh(x0, . . . , xn−1) diq′, r′, si ottienehf = gq + r, conr polinomio nellx0, . . . , xn nullo oppure digrado< s nellaxn. Dato chef eg si annullano su ogni punto diU , r deve fare lostesso, impossibile ser 6= 0 perche il suo grado nellaxn e troppo piccolo. Percior = 0, e g divide hf . Ma f e irriducibile, onde og e associato adf , ovverogdivideh; l’ultima cosa e impossibile, percheg han+ 1 indeterminate edh ne haal piu n. Perciog e associato adf . La stessa dimostrazione, ora che sappiamocheg e irriducibile, mostra cheg, e quindif , divide ogni elemento diM , e inconclusione cheM = fC[x].
Suppongasi oraU riducibile: U = U1 ∪ U2; adUi e legato un idealeMi, esi vede subito cheM = M1 ∩ M2; dato cheU1 ⊂ U , ci sono puntip tali chef(p) = 0, ma chefi(p) 6= 0 per qualcuna delle equazionifi(x) = 0 di U1. Oraf1 ∈ M1, e certof1 /∈ M (altrimenti laf(p) = 0 comporterebbef1(p) = 0); seanalogamente,f2 ∈ M2, ma /∈ M , si ha chef1f2 /∈ M percheM e primo; maf1f2 ∈ M1 ∩M2 = M , contraddizione. C.V.D.
SeU e varieta, dicesicomponente (irriducibile)di U ogni sottovarieta irri-ducibileU ′ di U per la quale esista qualche sottovarieta propriaU ′′ di U con laproprietaU = U ′ ∪ U ′′.
Teorema 4.39.2.Una ipersuperficie non vuotaU di equazionef(x) = 0 e unionedelle ipersuperficie irriducibili le cui equazioni hanno come primi membri i fattoriirriducibili di f(x); e queste sono tutte e sole le componenti diU .
Dim. Sef =∏
i grii , con i gi irriducibili a due a due non associati, ef(p) = 0
se, e solo se,gi(p) = 0 per qualchei; quindi U e unione delleUi di equazioni
2In realta, se laf(p) = 0 si riducesse adh = 0 con 0 6= h ∈ C, la pn non esisterebbe.Si puo essere sicuri che questo caso cattivo non si avvera sesi richiede chef(x) contenga unmonomio nella solaxn, ossia chef(0, . . . , 0, 1) 6= 0; cio e equivalente al richiedere cheU nonpassi per il punto(0, . . . , 0, 1) e questo lo si puo sempre ottenere con opportuna scelta del sistemadi riferimento.

Quadriche 75
gi(x) = 0; e queste sono irriducibili, ed anche componenti, per (4.39.1). Sia poiU ′ componente diU ; si haU ′ =
⋃i(Ui∩U ′), ove leU ′∩Ui vuote si suppongono
non scritte. EssendoU ′ irriducibile, cio comporta che qualcheUi ∩ U ′ non esottovarieta propria diU ′, siccheU ′ ⊆ Ui per qualchei. Poi, daU = U ′ ∩ U ′′,conU ′′ sottovarieta propria diU , si ricavaUi = (Ui∩U ′)∪(Ui∩U ′′); l’essereUi
irriducibile ora comporta che oU ′ = Ui, che e quanto si vuole dimostrare, ovverocheUi ∩ U ′′ = Ui, ondeUi ⊆ U ′′. Ma quest’ultima relazione e falsa, perche daU = U ′ ∪ U ′′ ⊆ U ′′, e cioeU = U ′′, contro l’ipotesi cheU ′′ fosse sottovarietapropria diU . C.V.D.
4.40 Lezione 40
C e ancora algebricamente chiuso, ma questa ipotesi sara abbandonata nel corsodi questa lezione. I (4.39.1), (4.39.2) mostrano che vi e corrispondenza biunivocafra ipersuperficie (diSn) irriducibili e forme irriducibili di C[x], queste ultimea meno di un fattore non nullo inC; o meglio, fra ipersuperficie irriducibili edideali primi principali diC[x]; e che la corrispondenza e estensibile fra ipersu-perficie (tutte) e forme che sono prodotti di fattori irriducibili distinti, sempre ameno di fattori non non nulloi inC, ed ivi compresa la forma1, supposta prodottodi zero fattori irriducibili. Possiamo ulteriormente estendere questa corrisponden-za se chiamiamodivisore(suSn) ogni elemento del gruppo additivo liberamentegenerato dalle ipersuperficie irriducibili. Al divisoreD =
∑i eiUi, con gli ei
interi e leUi ipersuperficie irriducibili distinte, in numero finito, si fa corrispon-deref(x) =
∏i fi(x)
ei ∈ C(x), sefi(x) = 0 e l’equazione diUi scelta confiirriducibile. In questo modo la corrispondenza e biunivoca fra il gruppo additivodei divisori e il gruppo moltiplicativoC(x)∗/C0, oveC0 = gruppo degli elementinon nulli di C, e C(x)∗ = gruppo degli elementi omogenei non nulli diC(x).Un elemento omogeneo diC(x) e il quoziente fra due forme diC[x], il suo gradoessendo la differenza fra quello del numeratore e quello deldenominatore.
ScriveremoD = divf(x), o divSnf(x) per maggiore precisione; l’ipersu-perficie
⋃i Ui (unione dellecomponentidi D che compaiono conmolteplicita ei
non nulla) e ilsupportodi D, eccetto cheD = 0 ha per supporto l’ipersuperfi-cie vuota. Se gliei sono tutti≥ 0, ed uno almeno e> 0, D si chiamapositivoo effettivo, ogni D puo essere scritto come differenza di due divisori positivi:D = D1 −D2; seD = divf , D1 eD2 si chiamano rispettivamente lozeroed ilpolodi f , semprecheD1 eD2 non abbiano componenti comuni; i divisori effettivisono percio idivf conf ∈ C[x].
Un divisore di tipo1U , conU ipersuperficie irriducibile, si chiama undiviso-re primo, e viene spesso indicato con la stessa letteraU che indica il suo supporto;ma e una cosa diversa: il supporto e un insieme di punti, mentre il divisore primoe soltanto un elemento di un certo gruppo, e non ha punti.
Ora abbandoniamo l’ipotesi cheC sia algebricamente chiuso, e indichiamocon C la sua chiusura algebrica; seSn e definito suC, la sua estensione aCsara indicata conSn; le varieta in Sn, dette anche varieta inSn definite suC,sono quelle varieta inSn che possono essere definite da equazioni i cui primi

76 Capitolo 4
membri appartengano aC[x]; un divisore suSn, detto anche undivisore suSn
razionale suC, e un divisore suSn del tipodivf(x), ovef(x) ∈ C(x); resta veroche il gruppo dei divisori suSn e isomorfo aC(x)∗/C0. Notare che con questedefinizioni un punto diSn e proprio un punto diSn definito suC, ossia tale chele sue coordinate possano essere scelte inC; lo si chiama anche, in analogia con idivisori, razionale suC.
Alcuni esempi:
1. C corpo reale,C complesso,D = div(x21 + x22 − x20), in S2; e razionale suC;la x21 + x22 − x20 = 0 da una ipersuperficie irriducibileU in S2 (curva), definitasuC; D = 1U e primo, e laU ha infiniti puti “reali”, ossia razionali suC, ilcui insieme non e una varieta.
2. Come prima, ma conx21 + x22 + x20; U e ancora irriducibile, eD = 1U primo,bencheU sia definita suC e irriducibile, non ha punti reali.
3. Sempre inS2, D = div(x21 + x22); la x21 + x22 = 0 e una curva riducibile diS2, con componentiU1 di equazionex1 +
√−1x2 = 0, e U2 di equazione
x1−√−1x2 = 0 (due rette); benchex21+x22 sia irriducibile inC[x], il divisore
D non e primo, ma e uguale a1U1 + 1U2; la curvaU1 ∪ U2 = suppD ha ununico punto reale, e precisamente(0, 0, 1); a differenza del caso1, questo puntoe una varieta, ma non una curva.
Gli esempi precedenti mostrano che benche una varieta diSn possa averepunti razionali suC, l’insieme di tali punti puo non essere una varieta, oppure see varieta puo non essere una ipersuperficie anche se la data lo e. Nel caso di unavarieta lineareH di Sn, ossia di un sottospazioH di Sn definito da equazioni acoefficienti inC, l’insieme dei suoi punti razionali suC e ancora un sottospazioH di Sn, della stessa dimensione diH in quanto definito dalle stesse equazioni;ma e un caso fortunato.
La differenza fra il grado del numeratore e quello del denominatore dif(x),ossia il grado di omogeneita dif(x), si chiama l’ordinedi D = divf(x); seSm
e sottospazio diSn, ma non disuppD, siano∑n
j=0 aijxj = 0 (i = 1, . . . , n −m) le sue equazioni; da esse si possono ricavare, per esempio, le xm+1, . . . , xncome combinazioni lineari delle rimanenti; se le sostituiamo in f(x), otteniamoun g(x0, . . . , xm) che e 6= 0 (ed anche6= ∞, ossia col denominatore6= 0; siintende chef(x) va prima ridotta ai minimi termini). Il divisore dig(x) suSm el’ intersezionedi D conSm, in simboliD∩Sm = Sm∩D; il suo supporto e proprioSm ∩ suppD seD e divisore effettivo. ChiaramenteordD = ord(D ∩ Sm),siccheordD e, perm = 1, il numero di punti di quest’intersezione, ogni puntocontato con la molteplicita con la quale le sue coordinate compaiono come zerodel polinomiog(x0, x1); meglio ancora, sep e il punto ep0 6= 0, la molteplicitache conta e quella dip1 come radice dig(p0, x1). Questo mostra che il passaggiodalle ipersuperficie ai divisori e analogo al passaggio dalle radici pure e semplicidi una equazione alle radici con le loro molteplicita.

Quadriche 77
4.41 Lezione 41
Una quadrica, in Sn sul corpoC (conica sen = 2), e un divisore effettivo diordine2; e quindi undivf(x), ovef(x) =
∑ij aijxixj , con gliaij elementi diC
non tutti nulli; qui stiamo evidentemente parlando di formequadratiche, sicche perprudenza supporremo d’ora in poi, e per tutta questa parte quarta, cheC non abbiacaratteristica2. Si puo allora supporre che la matriceA = (aij) sia simmetrica,visto che la parte antisimmetrica non ha influenza suf(x). La A determina laquadricaQ, e ne e determinata a meno di un fattore non nullo inC; inoltre siamoin un caso in cui non soloQ determinasuppQ, ma in cuisuppQ determinaQ;infatti, dovendoQ avere ordine2, possono darsi solo i tre casi seguenti:
1. Q e un divisore primo; allorasuppQ e una ipersuperficie irriducibile;2. Q e somma di due divisori primi distinti, ciascuno di ordine1; ognuno di questi,
essendo di ordine1, ha come supporto un iperpiano diSn, sicchesuppQ el’unione di due iperpiani;
3. Q e due volte un divisore primo di ordine1; in tal casosuppQ e un iperpiano,che a priori e iperpiano diSn, ma che vedremo essere in realta ipersuperficie inSn.
In tutti e tre i casi, appena vediamo chi esuppQ sappiamo come ricostruireQ.
La f(x) precedente si puo scriverex∗Ax, se al solitox =
( x0
...xn
); lo studio
delle quadriche e percio lo studio delle forme quadratiche, o il che e lo stesso, dellebilineari simmetriche, sullo spazio vettorialeV tale cheSn sia lo spazio proiettivopunteggiato legato a[V ]; o piu precisamente, delle forme quadratiche a meno diproporzionalita: ecco perche di queste forme quadratiche interessano solo gli zeri,mentre gli altri valori, che avrebbero significato suV (cfr. parte prima), perdonoogni significato inSn.
I casi1, 2, 3 precedenti devono essere riconosciuti daA, o dalla forma qua-dratica; eccone il modo, in ordine inverso:
3. A ha caratteristica1: se infatti l’equazione dell’iperpianosuppQ e a∗x = 0,cona matrice non nulla(n + 1) × 1 ad elementi inC, si haf(x) = (a∗x)2 =x∗(aa∗)x, edA = ρaa∗, conρ coefficiente di proporzionalita inC, ha carat-teristica1 (ogni riga e proporzionale ada∗). Ora si puo vedere chesuppQ edefinito suC: infatti ρaa∗ deve avere elementi inC; se uno degli elementi nonnulli di a viene fatto uguale ad1, una certa riga diA diviene proprio uguale aρa∗, siccheρa ha elementi inC; quindi ρ ∈ C eda ha elementi inC.
2. A ha caratteristica2: se infatti le equazioni dei due iperpiani che sono le com-ponenti disuppQ sonoa∗x = 0 e b∗x = 0, cona, b ad elementi inC, saraf(x) = (a∗x)(b∗x) = x∗(ab∗)x, ondeA = 1
2(ab∗ + ba∗); questa ha carat-
teristica2, perche intanto ogni riga e combinazione lineare dia∗ e b∗, sicche
la caratteristica e≤ 2; e poi se∆ =∣∣∣ ai biaj bj
∣∣∣ e un minore di(a, b) non nullo,
il minore delle righe e colonnei, j di A e uguale a−∆2/4 (fare il conto), ede quindi non nullo; quindi la caratteristica e proprio2 e non1. C’e anche da
78 Capitolo 4
osservare, in questo caso, che ogni riga diA e combinazione lineare dia∗ eb∗, sicche ser, s sono due tali righe indipendenti, e certo ad elementi inC,le rx = 0, sx = 0 sono le equazioni dell’Sn−2 intersezione dei due iperpianicomponenti disuppQ; pertanto tale intersezione e definita suC.
1. A ha caratteristica maggiore di2: se infatti la caratteristica em < n + 1, laforma quadraticaf(x) suV ha nucleo di dimensione uguale alla nullita diA(cfr. lezione 7, e 1.8.3), e quindi uguale an + 1 − m; ed allora, per quantodetto dopo l’(1.8.3), con una trasformazione lineare invertibile di coordinate acoefficienti inC la f(x) diviene una forma che contiene solom indeterminate;per il (4.38.1) (e soprattutto per la sua dimostrazione) laf(x) = 0 e un conoil cui vertice e un sottospazio diSn, definito suC, di dimensione uguale alnumero di indeterminate che mancano, diminuito di1, ossian − m. Se oram ≤ 2, questo numero e≥ n − 2; se la dimensione en − 1, il cono e uniperpiano, caso3 e non1; se la dimensione en − 2 (del vertice s’intende), ilcono e due iperpiani distinti, caso2 e non1. Quindi, nel caso1 la caratteristicadi A e maggiore di2 come annunciato all’inizio.
Le quadriche il cui supporto e un cono si chiamanoconi quadrici; si e cosı vistoche:Teorema 4.41.1.Una quadrica inSn e un cono quadrico se, e solo se, la suamatricee singolare; ed in tal caso il verticee un sottospazio diSn di dimensioneuguale alla nullita della matrice diminuita di1; tale verticee poi definito suC.
Le quadriche a matrice singolare sono dettequadriche degeneri, e le quadri-che descritte ai punti2 e3 si chiamanoquadriche spezzate. Dato che, per (4.38.1),il supporto di una quadrica degenere non e altro che la proiezione (nel senso piupreciso del 4.38.1) dal proprio vertice del supporto di una quadrica non degeneredi uno spazio di dimensione minore, basta limitarsi allo studio delle quadrichenondegeneri. Notare che sen = 1 (retta), ogni quadrica (somma di due punti)e spezzata; le degeneri sono i punti con molteplicita2; la parola “cono” perdesignificato (l’unico cono e la retta stessa).
4.42 Lezione 42
Quando unSn e considerato, come nel caso presente, spazio punteggiato, il suodualeS∗
n sara lo spazio di iperpiani formato dai suoi iperpiani; converremo chel’iperpiano di equazioneax = 0, cona = (a0, . . . , an), abbiaa0, . . . , an comecoordinate proiettive (pluckeriane), in accordo con quanto detto nella lezione 24.D’ora in poi parleremo prevalentemente di quadriche non spezzate in due iperpianicoincidenti, sicche sara inopportuno insistere ferocemente nella distinzione fraquadrica e suo supporto.
Siax∗Ax = 0 l’equazione di una quadrica non degenere; lax 7→ (Ax)∗ =x∗A e una proiettivita diSn suS∗
n, ossia una autoreciprocita diSn (lezione 22),che indicheremo conπ. Sex, y sono due punti tali chey appartenga aπx, si ha(x∗A)y = 0, onde(y∗A)x = 0, il che significa chex appartiene aπy. Questo, edil (2.22.1), mostrano cheπ e polarita, in quanto di puntix che non appartengano a

Quadriche 79
πx ce ne sono a bizzeffe (tutti quelli che non appartengono allaquadrica). Questoπ sara detto lapolarita legata alla quadrica; sea = πx, a e lapolaredi x, edx ilpolo di a. Le quadriche non degeneri appaiono cosı come i luoghi dei punti che,per una data polarita, stanno sulla propria polare; tali punti da essere presi inSn,salvo che taluni di essi saranno razionali suC. Naturalmente una polarita suSn dimatriceA e anche una polarita suS∗
n di matriceA−1, per (2.21.4); in altre parole,sea = πx = x∗A, allorax = (aA−1)∗. Quindiπ, o A, determina una quadricanon degenere inS∗
n, i cui “punti” sono iπx quandox percorre la quadrica inSn.Quindi la quadrica diSn, dettaquadrica-luogo, e il luogo dei punti (diSn) cheappartengono alla propria polare, mentre quelle diS∗
n, dettaquadrica inviluppo, eil luogo degli iperpiani (diSn) che passano per il proprio polo; le due quadriche,luogo e inviluppo, saranno detteduali l’una dell’altra; se una e chiamataQ, l’altrasaraQ∗.
Strettamente legata alla polarita e la questione della tangenza: abbandoniamoper un po’ l’ipotesi cheC non abbia caratteristica2, e siaD un divisore effettivoin Sn; un puntoP ∈ suppD dicesisemplicesuD se esiste qualche rettaR di Sn,passante perP ma non contenuta insuppD, tale cheP compaia con molteplicita1 inD∩R; dicesimultiploosingolarealtrimenti; sen = 1 la definizione ha ancorasenso, ma vuol dire semplicemente cheP e semplice se compare con molteplicita1 in D. Un Sm ⊆ Sn e tangente aD in P se intantoP ∈ Sm, e se inoltre oSm ⊆ suppD, ovveroP e punto singolare diD ∩ Sm; questo comporta subitoche seSm e tangente aD in P , e seSr ⊆ Sm passa perP , ancheSr e tangente aD in P . Il risultato generale e:Teorema 4.42.1.SiaD = divf(x) divisore effettivo suSn, e siaP ∈ suppD;siaai il valore, in C, che ∂f
∂xiassume inP , e pongasia = (a0, . . . , an); allora:
1. P e singolare suD se, e solo se,a = 0; in tal caso ogniSm passante perP etangente aD in P ;
2. SeP none singolare, unSm passante perP e tangente aD in P se, e solo se,e contenuto nell’iperpianoax = 0.
Dim. Pongasifi(x) = ∂f∂xi
, siccheai = fi(P ). Su una rettaR perP , si scel-gano le coordinate proiettivet, y in modo cheP abbia coordinatet = 1, y = 0.L’immersione diR in Sn e un’applicazione proiettiva una cui applicazione linearesoprastante sara del tipox = pit+biy, con lebi ∈ C non tutte nulle, o brevementex = Pt+By. LaR sara quindi tangente aD in P se, e solo se, ildivRf(Pt+By)ha come componente, con molteplicita maggiore di1, il puntoP di Sn, ossia ilpunto(1, 0) di R (oppure sef(Pt+By) = 0). EssendoP = divRy, cio accadrase, e solo se,f(Pt+By) e divisibile pery2. Ora, laf(Pt+By), come polinomionellay a coefficienti inC[t], ha il termine notof(Pt) = 0 e il termine di primogrado uguale a
∑i aibit
r−1y ser = degf(x) = ordD: infatti tale termine e
y
[∂f(Pt+By)
∂y
]
y=0
= y∑
i
bifi(Pt) = y∑
i
biaitr−1.
Poiche la divisibilita richiesta significa che tale termine di primo grado e 0, sivede che sea = 0 ogni R e tangente, siccheP e singolare. Se invecea 6= 0,

80 Capitolo 4
R e tangente se, e solo se,∑
i aibi = 0; dato che∑
i aipi = rf(P ) = 0 (euna proprieta di tutte le forme), la precedente significa
∑i ai(pit + biy) = 0, e
questa a sua volta vuol dire cheR appartiene all’iperpiano di equazioneax = 0.Il passaggio daR ad un qualsiasiSm e ovvio. C.V.D.
Corollario 4.42.2. Il luogo dei punti singolari diD e una varieta definita suC.
Dim. Le sue equazioni sonof(x) = 0, ∂f∂x0
= 0, . . . , ∂f∂xn
= 0. C.V.D.
Nel caso2 del (4.42.1), l’iperpianoax = 0 e l’iperpiano tangenteaD in P .
4.43 Lezione 43
Torniamo alle quadriche, e quindi alla convenzione cheC non abbia caratteristica2. Possiamo applicare il Teorema 4.42.1 allaf(x) = x∗Ax di una quadricaQ; lefi del (4.42.1) sono lefi(x) = 2
∑j aijxj elemento di indicei in 2Ax; quindi,
per un puntop ∈ suppQ le ai del (4.42.1) formano, a meno del fattore2, lamatrice1 × (n + 1) data dap∗A, che e quella delle coordinate pluckeriane dellapolare dip, quando questa esiste. Percio il puntop e singolare suQ se, e solose,p∗A = 0 (il che fra l’altro include l’esserep∗Ap = 0, ossiap ∈ suppQ); edi tali P ne esistono se, e solo se,A e singolare come matrice; questip, comevettori, sono quelli del nucleo della forma quadratica, e come punti sono quellidel vertice diQ [Quest’ultimo fatto, dato qui come conseguenza di quanto giasappiamo sul vertice, si vede anche elegantemente cosı: sep e singolare, ogniretta perp ha inp intersezione almeno doppia conQ, e quindi esattamente doppiapercheordQ = 2, oppure giace susuppQ; se tale retta passa per un altro puntodi suppQ, ma non giace susuppQ, intersecaQ in un divisore di ordine almeno3, assurdo percheordQ = 2; quindi deve giacere susuppQ]. Si e cosı visto:Teorema 4.43.1.Una quadrica ha punti singolari se, e solo se,e degenere; ed intal caso i suoi punti singolari sono tutti e soli quelli del vertice.
Per le non degeneri si ha:Teorema 4.43.2.Un iperpiano diSn e tangente alla quadrica non degenereQ diSn se, e solo se, contiene il proprio polop; ed in tal casop e l’unico punto ditangenza. In altre parole, datop ∈ Q, l’iperpiano tangente aQ in p e la polaredi p.Dim. Il (4.42.1) dice subito che l’iperpiano tangente aQ in p e la polarea dip; questo stesso iperpiano non puo essere tangente aQ altrove, perche un puntodiverso dap ha una polare diversa daa. C.V.D.
Se si mettono insieme i (4.43.1), (4.43.2) si vede che seQ e degenere convertice Sm, e seP e un suo punto semplice, l’iperpiano tangente aQ in P etangente aQ anche in tutti i punti diSm + P , e solo in questi.
Tutto questo puo naturalmente essere ripetuto per le quadriche inviluppo, os-sia per quelle diS∗
n; esse avranno “punti tangenti”; da notare che la dualeQ∗
di unaQ di S∗n esiste quandoQ e non degenere, ed e l’insieme degli iperpiani
tangenti aQ, siccheQ e l’insieme dei “punti tangenti” aQ∗. SeQ e degene-re, l’insieme dei suoi iperpiani tangenti e una varieta manon il supporto di una

Quadriche 81
quadrica: per esempio, inS2, seQ = R1 +R2 (rette distinte), quell’insieme con-siste di tutte le rette perR1 ∩ R2; e cioe una “retta” diS∗
2 . Cio non toglie chele quadriche degeneri diS∗
n esistano: scimmiottando la loro costruzione mediantevertice e quadrica non degenere di un sottospazio, si fa cosı: si sceglie unS∗
n−m−1sghembo conS∗
m (stella diSn di centro unSm sghembo al precedenteSn−m−1;notare che qui l’asterisco apposto ai simboli di sottospazio sta solo a ricordare chesono sottospazi diS∗
n, e non comporta la loro dualita con gli stessi simboli nonasteriscati); inS∗
n−m−1 si prende una quadrica non degenereH∗ (che consisteraquindi degli iperpianiL di Sn che contengonoSm e tali cheL ∩ Sn−m−1 sia tan-gente ad una quadrica non degenereH di Sn−m−1); la nostra quadrica degenereQ∗ sara allora l’insieme degli iperpianiK di Sn ciascuno dei quali appartiene adun fascio il cui centro e l’intersezione di uno qualunque dei precedentiL con uniperpiano qualunque contenenteSn−m−1. Si constata con un po’ di pensamentiche questo vuol dire solamente che:K ∈ suppQ∗ se, e solo se, oK contieneSn−m−1, ovveroK ∩ Sn−m−1 e tangente adH. Casi speciali:
1. Pern = 1: il solito punto contato due volte.2. Pern = 2:
(a) matrice di caratteristica2: due fasci di rette con centri distinti;(b) matrice di caratteristica1: un fascio di rette contato due volte.
3. pern = 3:
(a) matrice di caratteristica3: si sceglie una conica non degenereH su un pianoT ; la Q∗ e l’insieme formato daT (vertice) e da tutti i pianiK 6= T tali cheK ∩ T sia tangente adH;
(b) matrice di caratteristica2: due stelle (di piani) con centri distinti;(c) matrice di caratteristica1: una stella di piani contata due volte.
4.44 Lezione 44
La teoria delle quadriche, e soprattutto delle coniche, ha contribuito profonda-mente alla creazione della geometria proiettiva; vi e quindi una messe di risultatiche un tempo erano di dimostrazione un po’ riposta, ma che orapossono essereconsiderati dei semplici esercizi. Taluni di questi meritano di essere conosciuti,sia per l’eleganza che per l’utilita; eccone alcuni.
Ne premettiamo uno riguardante le proiettivita sulla retta: una tale proiettivitaπ di una rettaR (su C) in se, e unainvoluzionese e anche una polarita, ossiaπ2 = 1 = proiettivita identica; la matriceM , di tipo 2 × 2, di π dovra dunqueessere tale cheM2 = c = matrice scalare non nulla, sicche, seπ non e l’identita,il suo polinomio caratteristico saraz2 = c, e per (3.36.1)M sara simile a
(b 00 −b
),
oveb ∈ C e una radice quadrata dic. Supposto cheM abbia gia questa forma, ipunti unitidi π (quelli che corrispondono a se stessi) sono(0, 1) = u e(1, 0) = v;una coppia di punti corrispondenti sarax = (x0, x1) ey = (x0,−x1). Ora si vedeche il birapporto (u,v,x,y) = (∞,0,x1/x0,−x1/x0) vale−1 sicche:
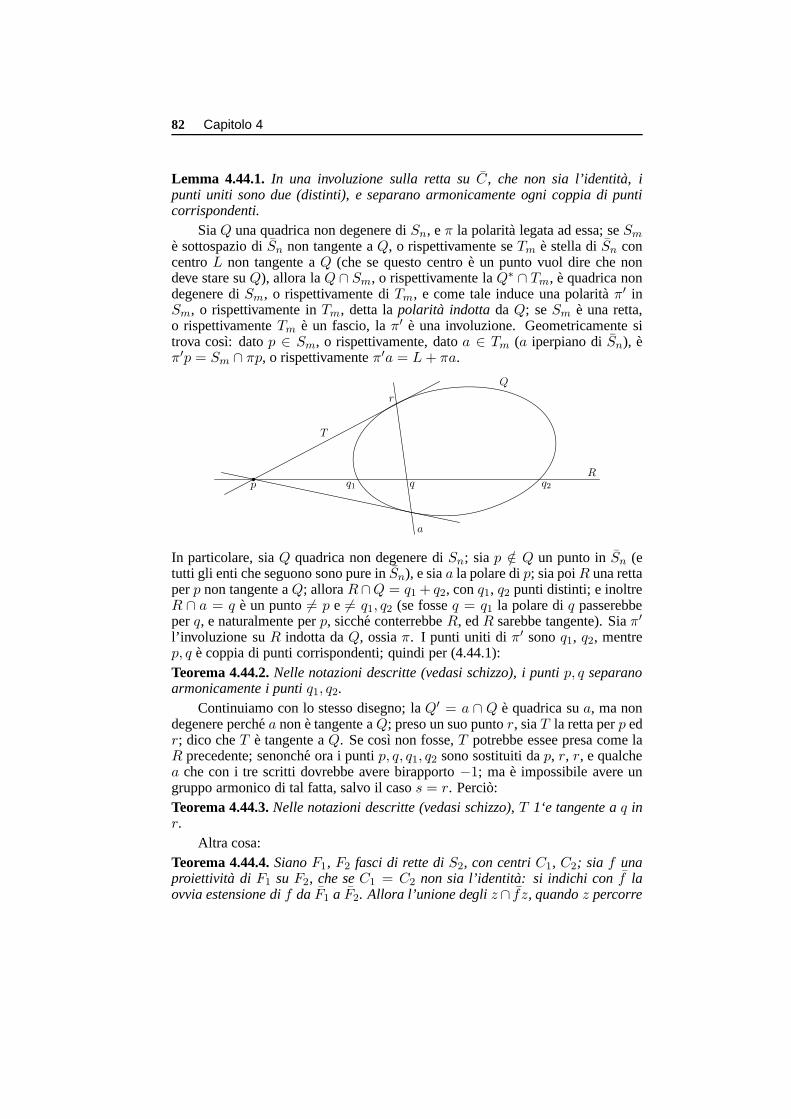
82 Capitolo 4
Lemma 4.44.1.In una involuzione sulla retta suC, che non sia l’identita, ipunti uniti sono due (distinti), e separano armonicamente ogni coppia di punticorrispondenti.
SiaQ una quadrica non degenere diSn, eπ la polarita legata ad essa; seSm
e sottospazio diSn non tangente aQ, o rispettivamente seTm e stella diSn concentroL non tangente aQ (che se questo centro e un punto vuol dire che nondeve stare suQ), allora laQ ∩ Sm, o rispettivamente laQ∗ ∩ Tm, e quadrica nondegenere diSm, o rispettivamente diTm, e come tale induce una polaritaπ′ inSm, o rispettivamente inTm, detta lapolarita indottadaQ; seSm e una retta,o rispettivamenteTm e un fascio, laπ′ e una involuzione. Geometricamente sitrova cosı: datop ∈ Sm, o rispettivamente, datoa ∈ Tm (a iperpiano diSn), eπ′p = Sm ∩ πp, o rispettivamenteπ′a = L+ πa.
p
r
a
q
T
R
Q
q1 q2
In particolare, siaQ quadrica non degenere diSn; siap /∈ Q un punto inSn (etutti gli enti che seguono sono pure inSn), e siaa la polare dip; sia poiR una rettaperp non tangente aQ; alloraR∩Q = q1 + q2, conq1, q2 punti distinti; e inoltreR ∩ a = q e un punto6= p e 6= q1, q2 (se fosseq = q1 la polare diq passerebbeperq, e naturalmente perp, sicche conterrebbeR, edR sarebbe tangente). Siaπ′
l’involuzione suR indotta daQ, ossiaπ. I punti uniti di π′ sonoq1, q2, mentrep, q e coppia di punti corrispondenti; quindi per (4.44.1):Teorema 4.44.2.Nelle notazioni descritte (vedasi schizzo), i puntip, q separanoarmonicamente i puntiq1, q2.
Continuiamo con lo stesso disegno; laQ′ = a ∩ Q e quadrica sua, ma nondegenere perchea non e tangente aQ; preso un suo puntor, siaT la retta perp edr; dico cheT e tangente aQ. Se cosı non fosse,T potrebbe essee presa come laR precedente; senonche ora i puntip, q, q1, q2 sono sostituiti dap, r, r, e qualchea che con i tre scritti dovrebbe avere birapporto−1; ma e impossibile avere ungruppo armonico di tal fatta, salvo il casos = r. Percio:Teorema 4.44.3.Nelle notazioni descritte (vedasi schizzo),T 1‘e tangente aq inr.
Altra cosa:Teorema 4.44.4.SianoF1, F2 fasci di rette diS2, con centriC1, C2; sia f unaproiettivita di F1 suF2, che seC1 = C2 non sia l’identita: si indichi conf laovvia estensione dif da F1 a F2. Allora l’unione degliz∩ fz, quandoz percorre

Quadriche 83
F1, e il supporto di una conicaQ di S2; la Q e degenere (=spezzata nel caso diS2) solo nei casi seguenti:
1. C1 6= C2 ma f e una prospettivita; in tal caso le componenti (distinte) diQsono la retta perC1 eC2, e l’asse di prospettivita;
2. C1 = C2 ed f ha due rette unite distinte:Q e spezzata in quelle due rette;3. C1 = C2 edf ha una sola retta unita:Q e quella retta, ma con molteplicita 2.
Reciproco parziale: SiaQ una conica non degenere diS2, e sianoC1, C2 suoipunti razionali suC; ad ogni rettaz di S2 per C1 si faccia corrispondere laz′
perC2 tale cheQ ∩ z′ − C2 = Q ∩ z − C1; allora la z 7→ z′ e proiettivita delfascio di centroC1 (in S2 su quello di centroC2.
Dimenticavo di dire che l’asse di prospettivita e per i fasci di rette quello cheil centro di prospettivita e per le rette (lezione 26).Dim. I casi2 e 3 sono ovvii; per il caso1, e per il reciproco, conviene il metodo
analitico. PrendiamoC1 =(
010
), C2 =
(001
), sicche le rette perC1 sono le
a = (a0, 0, a2), e quelle perC2 le b = (b0, b1, 0); la proiettivitaf sara data dab = aM , per una matriceM opportuna3 × 3 (e in realta una2 × 2 gonfiata pertener conto degli zeri fissi ina e b). Il punto x e suQ se, e solo se, e soluzionecomune diax = 0 edaMx = 0 per qualchea 6= 0, ossia se, e solo se, il sistemaprecedente, nelle incognitea0, a2 ammette soluzione non nulla. Cio accade se,e solo se, il minore delle righe0 e 2 della matrice dei coefficienti e nullo; matale minore e quadratico omogeneo non nullo inx0, x1, x2, ondeQ e conica. Lospezzamento diQ darebbe chef e prospettivita.
Per il viceversa basta ragionare cosı: datoz, lo z ∩ Q si ottiene risolven-do una equazione quadratica; ma una soluzione e gia nota (il puntoC1), sicchebasta risolvere una equazione lineare; trovata l’altra intersezionep, la rettaz′ sitrova linearmente; in tal modo si passa daz a z′ linearmente, e l’applicazione eun’applicazione proiettiva, che e necessariamente una proiettivita perche la suaimmagine contiene piu di unoz′. C.V.D.
Chiamiamop il punto Q ∩ z′ − C2 = Q ∩ z − C1 descritto nel (4.44.4); lacorrispondenzap 7→ z e biunivoca, e permette quindi di considerareQ stessa, omegliosuppQ, come unS1, dato cheF1 e unS1; ed anzi, i puntidisuppQ che so-no razionali suC sono in corrispondenza con le rette diF1, sicche il loro insiemepuo essere considerato come unS1. Questo sarebbe pero vano se la identificazio-ne dipendesse dalla scelta diC1; il (4.44.4) dice appunto che cosı non e. In altreparole, sep1, p2, p3, p4 sono punti diQ, di cui almeno3 distinti, e se ci proponia-mo di definire il loro birapporto per mezzo di (p1,p2,p3,p4) = (z1, z2, z3, z4), il(4.44.4) assicura che questa e una buona definizione. Ora sipuo dire che:
Teorema 4.44.5.Ogni conica non degenere razionale suC e uno spazio proiet-tivo punteggiato di dimensione1 (retta) suC (non, naturalmente, un sottospaziodell’S2 che la contiene). Se poiQ ha almeno un punto razionale suC, l’insiemedi tali punti e uno spazio proiettivo punteggiato di dimensione1 suC.

84 Capitolo 4
I (4.44.4), (4.44.5) permettono di risolvere graficamente “con la sola riga”problemi di secondo grado, purche sia data una conica (o conriga e compasso sela conica non e data).
4.45 Lezione 45
SeA0,A1 sono le matrici di due quadriche distinteQ0, Q1 nello stessoSn, laA =t0A0+ t1A1, cont0, t1 ∈ C, non ambedue nulli, e la matrice di una quadricaQ diSn; tutte queste quadricheQ, in corrispondenza biunivoca con i punti della rettaC su cuit0, t1 sono coordinate proiettive, formano unfascio di quadrichesuC;esso e quindi uno spazio proiettivo di dimensione1 suC. Se si permette at0, t1diassumere valori inC, si ottiene naturalmente l’estensione suC del fascio descritto(ma le quadriche non saranno piu tutte razionali suC). SeP e punto disuppQ0∩suppQ1, esso appartiene anche asuppQ per ogniQ; vi e una relazione moltostretta fra i fasci di quadriche e l’intersezione fra due di esse; e pero abbordabile,con quanto e a nostra disposizione, solo per le coniche.
Sia dunqueF un fascio di coniche suC, due distinte delle quali sono leQ0, Q1 di prima. Se queste sono ambedue spezzate, ed hanno una componentecomune, quella componente e comune a tutte leQ (dimostrarlo), sicche ogniQ espezzata; questo e un caso poco interessante (ed accade anche quando leQi sonoambedue spezzate ed hanno in comune un punto del vertice), e lo escluderemo. Intal casoQ e spezzata se, e solo se,detA = det(t0A0 + t1A1) = 0; il divF detAe una ipersuperficie di ordine3 in F , che e percio somma di tre “punti”L1, L2, L3
di F , ciascun punto essendo naturalmente una conicaQ ∈ F spezzata. Due diqueste, o tutte e tre, possono coincidere, e studieremo i vari casi in dettaglio. Datoche una degenere nel fascio c’e certamente (laL1), possiamo prendereQ0 = L1;laQ1 sara presa non spezzata.
1. L1 = R + T rette distinte, conP = R ∩ T /∈ suppQ1, edR,T nontangenti aQ1; ora suppL1 ∩ suppQ1 consta di4 punti a3 a 3 non allineati;vogliamo dimostrare che il fascio consta di tutte le conichepassanti per questi4punti:
R
T
Q1
P
si osservi infatti che l’equazione di una conica inS2 contiene6 coefficienti, deter-minati dalla conica a meno di proporzionalita; quindi l’insieme di tutte le coniche

Quadriche 85
forma unS5; quelle che passano per un punto formano unS4; per2, un S3; per3,un S2 (rete), e per4 non allineati, un fascio. Nel caso presente, le tre coppie dilatiopposti del quadrangolo piano completo (lezione 25) che ha iquattro punti comevertici sono le3 coniche spezzate, tutte distinte.
2. L1 = R+ T , conP = R ∩ T ∈ suppQ1, edR, T non tangenti aQ1; orasuppQ1 ∩ suppL1 consta di3 punti,P e altri dueP1, P2, non allineati;
P
P1
P2
P ′
Q1
H
M
R
T
L1 eQ1 hanno in comune la tangenteH in P , sicche cio resta vero per ogniQ ∈ F(dimostrarlo). Dato che l’imposizione di una tangente datain un dato punto e,nell’S5 del caso1, due condizioni lineari, il dare3 punti e la tangente in uno di essida4 condizioni lineari, siccheF consta di tutte le coniche passanti per i tre punti eaventi inP tangenteH. Una di queste eL1, che possiamo prendere come divisoredi x1x2; un’altra eL2 = H + (rettaM perP1 eP2, che possiamo prendere comedivisore di(x1 + x2)x0. OraQ e il divisore dit0x1x2 + t1(x1 + x2)x0, sicchedetA = t0t
21, donde si vede cheL3 = L1. Due qualunque coniche del fascio si
chiamanotangentiin P .3. (vedasi figura del caso2). L1 = H +M , conP ′ = H ∩M /∈ suppQ1,
edH, ma nonM , tangente aQ1 in un puntoP certo 6= P ′; 3 punti di interse-zione, e cioeP e i dueP1, P2 di M ∩ Q1; di nuovoH e tangente comune, ondeL2 = somma delle due retteR (perP eP1) eT (perP eP2); idem come caso2conL1, L2 scambiate.
4. L1 = R + T , conP = R ∩ T /∈ suppQ1, maR, T tangenti aQ1 in P1,P2 rispettivamente;2 punti d’intersezione, e ivi due tangenti date, distinte;
P1
P2
PH
R
T
Q1
le Q ∈ F sono determinate da queste proprieta,L2 = 2(rettaH perP1, P2);L1 = divx1x2; L2 = divx20; Q = div(t0x1x2 − t1x
20); detA = t20t1, sicche
L3 = L1.5. L1 = R + T , P = R ∩ T ∈ suppQ1, R tangente aQ1 in P ; due punti di
intersezioneP eP ′; due qualunque coniche del fascio sonoosculatrici in P .

86 Capitolo 4
P
P ′
Q1
RT
SeL2 6= L1, P deve essere sul vertice diL2, col che le equazioni sia disuppL1
che disuppL2 possono essere espresse in modo da contenere solo, per esempio,x0 ed x1; lo stesso sara vero di ogniQ, onde ogniQ e spezzata, caso escluso.Questo basta a dire cheL2 = L1, e quindi= L3.
6. (Vedasi figura del caso 4).L1 = 2H, H non tangente aQ1; seP1 + P2 =H ∩ Q1, tutte leQ passano perP1, P2, ed hanno ivi le tangentiR, T di Q1; ecome il caso4.
7. L1 = 2R, R tangente aQ1 in P ; un punto d’intersezione ed ivi datatangente;
P
Q1
R
due qualunque coniche del fascio sonoiperosculatrici in P . Stesso discorso delcaso5, siccheL1 = L2 = L3.
C’e un premio come conseguenza di tutta questa discussione: chiamiamociclo (di dimensione zero) suSn ogni elemento del gruppo additivo liberamentegenerato dai punti; per i cicli si adotta la nomenclatura deidivisori: l’unione deipunti e il supporto; poi ci sono lecomponenti, le molteplicita, i cicli effettivio positivi, e l’ordine del ciclo (=somma delle molteplicita). Ora l’intersezioneQ∩Q′ di due coniche qualunque del fascio (ma due coniche stanno sempre in unfascio) puo essere definita come ciclo effettivo di ordine4 nel modo seguente (inumeri si riferiscono ai casi elencati):
1. La somma dei quattro punti;2. e 3.2P + P1 + P2;4. e 6.2P1 + 2P2;5. 3P + P ′;7. 4P .
4.46 Lezione 46
Prima di proseguire, non voglio passare sotto silenzio l’enunciato (senza dimostra-zione) di un famoso teorema di cui la definizione che chiude lalezione precedente

Quadriche 87
e un minimo esempio. Vi e un metodo, che non descrivo, di definire l’intersezio-ne din divisori di Sn quando l’intersezione dei loro supporti consta di un numerofinito di punti. Il risultato e il seguente:
Teorema 4.46.1(di Bezout). SeD1, . . . ,Dn sono divisori diSn, di ordini r1, . . . , rn,e se
⋂i suppDi e un insieme finito, allora
⋂iDi e un ciclo di ordine
∏i ri.
Questo teorema e, fra l’altro, un modo di esprimere correttamente un teoremasulle equazioni, un cui enunciato abbastanza comune, ma falso, e il seguente:sen equazioni algebriche inn incognite hanno un numero finito di (sistemi di)soluzioni, tale numero e uguale al prodotto dei loro gradi.Esempio della falsitadi questo enunciato:x = 0, xy = 1; gradi 1, 2; soluzioni: nessuna; traduzionegeometrica:x0 = 0, x0x1 = x22; sono retta e conica; intersezione, ossia soluzioni:punto(0, 1, 0) con molteplicita2.
Passiamo ad altro, e precisamente alla classificazione delle quadriche non de-generi. Non dimentichiamo che seSn = [V ]1, i punti della quadrica (perlomenoquelli razionali suC) sono i〈v〉 generati daiv ∈ V non nulli e isotropi nella nor-ma la cui matrice e la matrice della quadrica; stiamo perci`o studiando le norme,e ci dobbiamo aspettare le difficolta connesse col gruppo diWitt. Cominciamocon laclassificazione proiettiva; significa che data unaQ non degenere, occorretrasformarla, mediante proiettivita, in una la cui matrice sia “canonica”; equiva-lentemente: occorre trovare un nuovo sistema di riferimento proiettivo nel qualela matrice dellaQ sia canonica. Le matrici delle quadriche si trasformano percongruenza, sicche il (1.14.5) dice che ogni quadrica non degenere puo ridursialle forme:
C arbitrario:n∑
i=0
cix2i = 0, 0 6= ci ∈ C;(4.46.2)
C algebricamente chiuso:n∑
i=0
x2i = 0;(4.46.3)
C ordinato con ogni elem. positivo un quadrato:(4.46.4)r∑
i=0
x2i −n∑
i=r+1
x2i = 0;2r ≥ n− 1;r univocamente determinato.
Il (4.46.2) da poche informazioni, perche se ci imbattiamo in due quadriche condei ci diversi, non sappiamo dire se esse siano o no la stessa quadrica in sistemidi riferimento diversi; i (4.46.3) e (4.46.4) invece danno informazioni totali: ilprimo dice che, per quei corpi, vi e una sola quadrica, a menodi trasformazioniproiettive; il secondo dice che, per quei corpi, vi e un numero finito di quadriche(sempre a meno di. . . ), riconoscibili dal numeror che e un invariante.
Casi particolari:
4.46.5.C come nel (4.46.4),n = 2, r = 1: x20 + x21 − x22 = 0; coniche con puntirazionali suC; idem,r = 2: x20 + x21 + x22 = 0; coniche senza punti razionali suC.

88 Capitolo 4
4.46.6.C come nel (4.46.4),n = 3, r = 1: x20 + x21 − x22 − x23 = 0; quadriche apunti iperbolici; infiniti punti razionali suC; idem,r = 2: x20+x21+x22−x23 = 0;quadriche a punti ellittici; infiniti punti razionali suC; idem,r = 3: x20 + x21 +x22 + x23 = 0; quadriche senza punti razionali suC.
Il motivo della nomenclatura sui punti e il seguente: seC e ordinato, ognicoppia di piani distintia, b spezza il complementare dia ∪ b in S3 in due parti;precisamente la parte formata dai puntip per i quali il rapportoap
bp e positivo, equella per la quale e negativo. Si puo anche dire che seA3 e lo spazio affineper il qualeb e il piano improprio, il complementare dia in A3 e spezzato indue daa; precisamente il pezzo formato dai puntip con ap > 0, e quello conap < 0, avendo scelto le coordinate dip, come e solito per gli spazi affini, inmodo chebp = 1. Notare che un piano solo non spezzaS3; il tutto e ripetibileperSn qualunque. L’ordinamento inC rendeC spazio topologico; quindiA3 eanch’esso topologico in quanto omeomorfo aC ×C ×C; seb e un altro piano, eA′3 e il corrispondente spazio affine, le topologie diA3 ∩ A′
3 indotte da quella diA3 e da quella diA′
3, coincidono; questo permette di parlare di “intorni del puntoq” in S3, intendendosi che essi siano presi in qualsiasiA3 il cui piano improprionon contengaq.
Premesso tutto questo, si consideri la quadricaQ del (4.46.6),r = 1. Lametrica data dalla sua matrice (nello spazio vettorialeV4 soprastante il proiettivoS3) e iperbolica, onde, per (1.9.3), con un cambiamento di coordinate l’equazionedella quadrica divieney0y1 + y2y3 = 0; il cambiamento ey0 = x0 + x3, y1 =x0 − x3, y2 = x1 + x2, y3 = x1 − x2; consideriamo un suo puntop razionale suC nel quale, per esempio,p0 6= 0, sicche si puo supporrep0 = 1; in un intornodi esso inS3 e anchey0 6= 0, onde di nuovoy0 = 1, e l’equazione in coordinatecartesiane divieney1 + y2y3 = 0. La polarea di p (solo i suoi punti razionalisuC) ha equazionep1 + y1 + p3y2 + p2y3 = 0; si vede quindi che le retteRp ,Tpintersezioni dia con i pianiy2 = p2 ey3 = p3 sono distinte e sono suQ ∩ S3;percioQ ∩ a = Rp + Tp. Le retteRp, Tp, al variare dip, sono le dueschiere direttedi Q, e si constata facilmente che ogniRp interseca ogniTq (ma non coincidecon essa), mentre dueRp (idem per dueTp) sono sghembe se non coincidono. Ilfatto cheQ ∩ a abbia, in un intorno dip, dei punti razionali suC mostra gia,intuitivamente, che laa “attraversa”Q in un intornop, ossia che i punti diQrazionali suC in un intorno dip, stanno alcuni in uno, e altri nell’altro, di queidue pezzi diA3 di cui si e parlato prima; si esprime cio appunto col dire che ognip epunto iperbolico. Per vederlo bene cerchiamo il segno dip1+y1+p3y2+p2y3quandoy appartiene aQ ∩ A3
3 ed e vicino ap. La y ∈ Q significay1 = −y2y3,sicche cerchiamo il segno dip1−y2y3+p3y2+p2y3 quandoyi = pi+εi, εi ∈ Cpiccoli; sostituendo si ottiene−ε2ε3, che effettivamente assume valori positivi enegativi.
Vediamo cosa succede per laQ del (4.46.6),r = 2; ora la metrica non eiperbolica, ma lo diventa suC per (1.14.2) (basta sostituirex2 con ix2, ovei2 =
3Q ∩ S3 nel testo.

Quadriche 89
−1); cambiando dallex alle y (ma oray2 = x1 + ix2, y3 = x1 − ix2) si trovanoancora le due schiere di rette, che pero sono inS3 e non definite suC. Orainteressa ancora il segno dip1+ y1+p3y2+p2y3 nell’intorno dip in S3; e questaespressione e ancora−ε2ε3; senonche oraε2 = η1 + iη2, ε3 = η1 − iη2, conη1, η2 ∈ C; pertanto−ε2ε3 = −η21 − η22 < 0: i punti di Q, razionali suC, viciniap, stanno in uno solo dei due pezzi in cuia separaA3.
4.47 Lezione 47
Passiamo allaclassificazione affine. Ora inSn si e fissato un iperpianoZ, peresempiox0 = 0, come iperpiano improprio, ottenendo uno spazio affineAn; letrasformazioni permesse sono le affinita (lezione 17), ossia (lezioni 23 e 24) leA 7→ M∗AM conM di tipo (1.18.4) (ripetuto nella lezione 24):
(4.47.1) M =
1 0 . . . 0b1... M ′
bn
.
Se laQ non e degenere, ovvero e degenere ma non spezzata inZ+ iperpiano,l’equazione diQ nelle coordinate affiniyi =
xi
x0(i = 1, . . . , n) resta di secondo
grado, sebbene non piu omogenea. La si puo ottenere indifferentemente dallax∗Ax = 0 sia dividendo perx20, sia ponendox0 = 1.
Una prima classificazione delle non degeneri e fra le tangenti a Z, dettepa-raboloidi (parabolesen = 2), e le altre, dettequadriche a centro; il centro e ilpolo diZ; naturalmente un’affinita non cambia la proprieta di esser paraboloideo a centro. SiaQ′ = Q ∩ Z, siccheQ e paraboloide o a centro secondocheQ′ edegenere o no; la matriceA′ di Q′ e ottenuta dallaA di Q cancellandovi la primariga e la prima colonna; l’M ′ del (4.47.1) puo essere scelto in modo che laA′
assuma forma canonica diagonale; laA diviene allora
a0 a1 . . . ana1 c1...
. . .an cn
.
Si noti che, per quanto detto alla lezione 29, la trasformazioneA 7→ M∗AM , conM del tipo (4.47.1), permette di fare su righe e colonne diA tutte le operazionielementari (le stesse sulle righe che si fanno sullle colonne) ad eccezione delleseguenti: 1) moltiplicazione della prima riga (colonna) per un numero6= 1; 2)scambio della prima riga (colonna) con altra; 3) aggiunta della prima riga (colon-na), moltiplicata per un numero6= 0 ad altra riga (colonna). Se allora leci sonotutte non nulle, ossia seQ e a centro, operazioni elementari permesse annullanole a1, . . . , an, ma non certoa0 percheQ e non degenere; resta la forma canonica:

90 Capitolo 4
4.47.2.Q a centro;C arbitrario:∑n
i=0 cix2i = 0; ci ∈ C, ci 6= 0;
4.47.3.Q a centro;C algebricamente chiuso:∑n
i=0 x2i = 0;
4.47.4.Q a centro; C ordinato e con ogni positivo un quadrato:∑r
i=0 x2i −∑n
i=r+1 x2i = 0; r univocamente determinato e≥ 0 (ossiax20 deve aver coeffi-
ciente+1).
L’ultimo caso si e ottenuto cosı: laa0 la si fa diventare1 dividendo tutto pera0; le ci si fanno diventare±1 mediante operazioni elementari permesse, che orain C sono possibili perche i positivi sono quadrati. Il centro nelle (4.47.2,3,4),e (1, 0, . . . , 0). Come nella classificazione proiettiva, ici del (4.47.2) non sonounici, sicche il (4.47.2) dice poco; invece il (4.47.3) dice che vi e un sol tipo diquadriche a centro, ed il (4.47.4), over e univocamente determinato, da i vari tipidi quadriche a centro. Casi particolari del (4.47.4) (cfr. 4.46.5 e 4.46.6):4.47.5.• Come (4.47.4), man = 2, r = 0: x20 − x21 − x22 = 0; ellissecon infiniti
punti razionali suC; la Q′ = Q ∩ Z non ha punti razionali;• idem,r = 1; x20 + x21 − x22 = 0; iperbole; ha infiniti punti razionali suC; laQ′ = Q ∩ Z ha due punti razionali (distinti);
• idem,r = 2; x20 + x21 + x22 = 0; ellisse senza punti razionalisuC.
4.47.6.• Come (4.47.4), man = 3, r = 0: x20 − x21 − x22 − x23 = 0; ellissoidecon infiniti punti razionali suC; la Q′ = Q ∩ Z non ha punti razionali;
• idem,r = 1; x20 + x21 − x22 − x23 = 0; iperboloide iperbolico, o a una falda(perche?); infiniti punti razionali suC; Q′ = Q ∩ Z ha punti razionali;
• idem, r = 2; x20 + x21 + x22 − x23 = 0; iperboloide ellittico, o a due falde(perche?); infiniti punti razionali suC; Q′ = Q ∩ Z ha punti razionali;
• idem,r = 3; x20 + x21 + x22 + x23 = 0; ellissoide senza punti razionalisuC.
Nelle quadriche a centro, le rette per il centro sono idiametri, e gli iperpianiper il centro sono gliiperpiani diametrali; nel fascio (pern = 2) o stella (pern > 2) di centro nel centro della quadrica, la polarita indotta dalla quadrica (le-zione 44) si chiama l’involuzione dei diametri coniugati; pern = 2 e veramenteun’involuzione; i due elementi corrispondenti si chiamanoconiugati. Se il cor-poC e come nel (4.47.4), la distinzione (delle quadriche a centro) in iperboloidie ellissoidi e valida per qualunque dimensione dello spazio; Q e iperboloideseQ∩Z ha punti razionali suC; eellissoidealtrimenti. Per il (4.44.3), fra i diametrivi sono le rette tangenti aQ e passanti per il centro, che sono poi le rette per ilcentro e per i punti diQ ∩ Z; sono rette diSn, ma seQ e iperboloide, e soloallora, alcune di esse contengono due punti razionali suC (il centro e il punto ditangenza quando questo e razionale suC), e sono quindi estensioni suC di rettedi Sn tutte queste rette, anche quando non sono definite suC, sono gliasintotidiQ; pern = 2, le ellissi hanno due asintoti non definiti suC; le iperboli ne hannodue definiti suC. Pern > 2 gli asintotiti sono tutte le rette (generatrici) di uncono quadrico proiettanteQ ∩ Z dal centro diQ, detto il cono asintotico; la suaequazione si ottiene ponendox0 = 0 nell’equazione della quadrica.
Veniamo al caso in cuiQ′ = Q∩Z e degenere, siccheQ e un paraboloide. Laforma diA che precede il (4.47.2) e ancora valida, ma ora uno deici = 0 (ma nondue perche in tal casoA stessa sarebbe singolare). Mediante operazioni elementari

Quadriche 91
permesse, si puo supporre checn = 0; si puo poi annullarea0, a1, . . . , an−1
perchean 6= 0; infine,an diventa1 mediante proporzionalita. Quindi
4.47.7.Q paraboloide;C arbitrario: 2x0xn +∑n−1
i=1 cix2i = 0; ci ∈ C, ci 6= 0;
4.47.8.Q paraboloide;C algebricamente chiuso:2x0xn +∑n−1
i=1 x2i = 0;4.47.9.Q paraboloide;C ordinato e con ogni positivo un quadrato:2x0xn +∑r
i=1 x2i −
∑n−1i=r+1 x
2i = 0; r univocamente determinato.
Casi speciali:4.47.10.Come (4.47.9), man = 2: 2x0x2 + x21 = 0; parabolainfiniti puntirazionali suC;4.47.11.• Come (4.47.9), man = 3, r = 1: 2x0x3 + x21 − x22 = 0; paraboloide
iperbolico, o a sella; infiniti punti razionali suC;• idem, mar = 2; 2x0x3 + x21 + x22 = 0; paraboloide ellittico; infiniti punti
razionali suC.
4.48 Lezione 48
Passiamo allaclassificazione metrica; seAn e lo spazio affine ottenuto prendendoZ, ossiax0 = 0 come iperpiano improprio, e il gruppoT delle omologie spe-ciali di asseZ come gruppo delle traslazioni (lezione 23), bisogna anzitutto dareuna metrica suAn, e cioe una norma suT (lezione 17). Questa sara determinatada una matrice simmetrica non degenereH di tipo n × n. Come si e visto al-la lezione 23,T e isomorfo (sebbene non canonicamente) allo spazio vettorialei cui sottospazi di dimensione1 sono i punti diZ, sicche diremo addirittura cheZ = [T ]1; se quindi ci si contenta di dare la matriceH a meno di proporzionalita,ossia di dare la metrice a meno dell’unita di misura, basta dare la quadrica non
degenerex′∗Hx′ = 0 su Z, ovex′ significa
( x1
...xn
). Tale quadrica, che come
ripeto e equivalente alla metrica esclusa l’unita di misura, si chiama l’assoluto, edi suoi punti si chiamano ipunti ciclici; il motivo sta nel fatto che, come vedremo,nel cason = 2, una conica e un cerchio se, e solo se, passa per i due punti ciclici.Invece le rette diAn che, in quanto rette diSn contengono qualche punto ciclico,si chiamano lerette isotrope; in generale, si chiamanoisotropi tutti i sottospazidi An che in quanto sottospazi diSn, hanno conZ una intersezione tangente al-l’assoluto. Ed allora, l’insieme di tutti gli iperpiani isotropi, piuZ e una quadricainviluppo (quadrica diS∗
n) degenere (cfr. la fine della lezione 43); anche questaviene spesso chiamata l’assoluto. La sua equazione, in coordinate pluckeriane, e
(4.48.1) a(0 00 H−1
)a∗ = 0.
L’assoluto da una polarita suZ (polarita assoluta): x′ 7→ (Hx′)∗; se proiettiamox′ e la sua polare(Hx′)∗ da un puntoP di An, che senza perdita di generalitapossiamo supporre essere(1, 0, . . . , 0), le x′ e (Hx′)∗ sono coordinate rispet-tivamente di un “punto” e di un “iperpiano” della stella di centro P , sicche la

92 Capitolo 4
x′ 7→ (Hx′)∗ diviene una polarita in quella stella. Un puntoy′ della stella, ossiauna retta diSn, appartiene all’iperpiano(Hx′)∗ sex′∗Hy′ = 0. Ma questa e lacondizione di ortogonalita dei vettorix′, y′ di T , sicche la polarita della stella equella che fa corrispondere ad ogni retta perP l’iperpiano perP ad essa ortogo-nale; si chiama percio l’involuzione degli angoli retti(ma e una involuzione solosen = 2).
SiaQ una quadrica non degenere diSn; per poterne ridurre la matrice aduna forma canonica occorre anzitutto che il sistema di riferimento di partenza(x0, . . . , xn) sia in qualche modo canonico rispetto alla metrica; e l’unico modoche conosciamo e quello di richiedere che i vettori (nello spazioT delle trasla-zioni) che mandano(1, 0, . . . , 0) sugli (1, 0, . . . , 0, 1, 0, . . . , 0) (1 nei posti0 edi)formino una base in qualche modo canonica; cio possiamo ottenere seC e algebri-camente chiuso richiedendo base ortonormale, e cioeH = 1; o seC e ordinato,con ogni positivo un quadrato, richiedendo cheH sia del tipo
h1h2
. . .hn
, conhi = ±1.
Supporremo allora sempre nel seguito di essere in uno di questi due casi; do-podiche, seA e la matrice diQ, i movimenti rigidi trasformanoA in M∗AM ,conM avente la forma (4.47.1), ove pero ora laM ′ deve essere matrice di unatrasformazione ortogonale (leM , M ′ sono rispettivamente leB, F del (1.18.4);quest’ultima condizione significa, per (1.8.5),
(4.48.2) M ′∗HM ′ = H.
SeC e algebricamente chiuso si e visto cheH = 1, sicche le trasformazio-ni ortogonali sono date da matrice ortogonali; dopodiche non sappiamo andareavanti, perche non sappiamo nulla sulla forma canonica della matrici simmetri-che rispetto alla simiglianza ortogonale nel caso di corpi algebricamente chiusi.
Ad esempio, pern = 2, seA =(
1 0 00 1+i 10 1 1−i
), con i2 = −1 (corpo comples-
so), la conica e a centro, ma la sua matrice non e riducibilea forma diagonalemediante movimenti rigidi del piano: infatti
(1+i 11 1−i
)ha l’unico autovalore1
(cfr. 3.36.1). Percio abbandoniamo l’impresa, e passiamoad investigare l’unicocaso per il quale abbiamo un risultato utile: il corpoC ordinato, tale che ogni suoelemento positivo sia un quadrato, e tale cheC[
√−1] sia algebricamente chiuso;
questa convenzionee in forza fino alla lezione50 compresa.Anche sotto questa ipotesi, seH non e definita (positiva o negativa) non si
riesce sempre a diagonalizzare l’A′ della matrice di una conica. Se per esempio,A′ = ( 1 2
2 1 ), non esiste unaM ′ ad elementi inC tale cheM ′∗A′M ′ sia diagonalee che la (4.48.2) sia soddisfatta conh1 = 1, h2 = −1: se infatti poniamoM ′ =

Quadriche 93
( x yz t ), le precedenti relazioni significano
xy + zt+ 2(xt+ yz) = 0
xy = zt
x2 − z2 = 1
y2 − t2 = −1
Ora, dalle prime due seguezt + xt + yz = 0, che moltiplicata perx e tenendoconto della seconda dat(xz + x2 + z2) = 0; e t 6= 0 (altrimenti y2 = −1dall’ultima), ondexz + x2 + z2 = 0, che insieme alla terza daxz + 2x2 = 1. Dinuovox 6= 0 (per la terza), sicchez = (1 − 2x2)/x, che sostituita nella terza da3x4 − 3x2 + 1 = 0, e questa equazione non puo dare unx2 reale. Supporremoquindi d’ora in poi, e fino alla lezione 50 compresa, cheH sia definita, ed anzicheH = 1 (spazio euclideo). Il casoH = −1 e perfettamente analogo; il caso diH non definito (positivo o negativo) e anch’esso riducibile,per computi pratici, alcasoH = 1 mediante trasformazioni del tipoxj 7→
√−1xj per certej.
Con le convenzioni fatte, le isometrie sono date dalleM con M ′ matriceortogonale; e sappiamo da (3.36.2) cheA′ e ortogonalmente simile ad una matricediagonale; si puo cioe supporre
A =
? ?c1
?. . .
cn
.
Ora, il solito discorso fatto per la classificazione affine: con unaM del tipo(4.47.1), ma conM ′ = 1, laA puo essere ridotta alla forma
(4.48.3) B =
a 0 . . . 0 b0 a1...
. . .
0. . .
b an
ovea = −1, b = 0, ai 6= 0 per le quadriche a centro, mentrea = 0, b = −1,ai 6= 0 sei 6= n, an = 0 per i paraboloidi; morale:4.48.4.C ordinato, con ogni positivo un quadrato, e conC[
√−1] algebricamente
chiuso; spazio euclideo; quadriche a centro:
n∑
i=1
aix2i = x20;
gli ai ∈ C univocamente determinati;

94 Capitolo 4
4.48.5.C idem; spazio euclideo; paraboloidi:
n−1∑
i=1
aix2i = 2x0xn;
gli ai ∈ C univocamente determinati a meno di un cambiamento complessivo delsegno.
4.49 Lezione 49
Proseguiamo con la classificazione metrica. Intanto interessa saper trovare i valoridegliai dei (4.48.3, 4.48.4, 4.48.5) dallaA originale; cominciamo dalle quadrichea centro. Per passare daA a B si e applicata prima una simiglianza ortogonaleallaA′; poi si e applicata allaA una congruenza con unaM a determinante1 chelasciaA′ invariata; e infine si e diviso per unρ ∈ C non nullo. I ci erano gliautovalori diA′, e gli ai = ρ−1ci sono quelli diB′, siccheρai = ci; poi,
detA′ =∏
i
ci = ρn∏
i
ai mentre detA = ρn+1 detB = −ρn+1∏
i
ai,
siccheρ = − detAdetA′ , e infine
4.49.1.Nella (4.48.4), gliai sono gli autovalori della matriceA′ moltiplicati per−detA′
detA .Per i paraboloidi il discorso e simile, ma le formule sono:
(prodotto autovalori non nulli diA′)= ρn−1∏
i 6=n
ai,
detA = ρn+1 detB = −ρn+1∏
i 6=n
ai,
siccheρ−2 = −prodotto autovalori non nulli diA′
detA :
4.49.2.Nella (4.48.5) gliai uguagliano gli autovalori non nulli della matriceA′
moltiplicati per la radice quadrata (una qualunque delle due) del rapporto fra illoro prodotto e− detA.
Un po’ di nomenclatura riguardante le (4.48.4, 4.48.5). I nomi per le conichee quadriche (sen = 2, 3) sono gli stessi che nei casi (4.47.5, 4.47.6) e (4.47.10,4.47.11); resta da dare dei nomi (pern qualunque) ai coefficienti stessi: nel ca-so (4.48.4) (quadriche a centro) glia−1
i sono iquadrati dei semiassi(vedremo
perche), sicche i semiassi sono i±a−1/2i ; e pero invalso l’uso di chiamaresemias-
sela radice quadrata positiva, inC, di ±a−1i (il ± scelto in modo che±ai > 0);
tale semiasse e poi chiamatorealeseai > 0, e trasversoaltrimenti. Nel (4.48.5),gli a−1
i si chiamano semplicementeparametri; sono determinati, come si e visto,

Quadriche 95
a meno del segno; se pero lo spazio affine, oltre che metrico,e orientato, il cam-biamento di segno non e piu permesso se si vuol mantenere l’orientamento, ed iparametri restano univocamente determinati.
Un puntox di An ha da un punto fissoP , che prendiamo uguale a(1, 0, . . . , 0),un quadrato della distanza dato dar2 6= 0 se, e solo se,
∑ni=1 r
−2x2i = x20, il luo-go di tutti i punti di Sn soddisfacenti a questa e una ipersuperficie irriducibile,supporto di una quadrica. Tale quadrica e dettasfera(cerchioo circolo sen = 2)di centroP equadrato del raggior2; cio vale per un corpoC qualunque e metricaarbitraria4; ma nel nostro caso si vede che una sfera e un ellissoide il cui centro(come quadrica a centro) e proprio il centro della sfera, e icui quadrati dei semias-si sono tutti uguali (al quadrato del raggio). Notare che unaquadrica non degeneree sfera se, e solo se, la sua intersezione con l’iperpiano improprio e l’assoluto. Perr = 0 si ottengono lesfere degeneri, che sono iconi isotropidi vertice nel centrodella sfera; e volendo uno puo anche parlare della “sfera diraggio infinito”, che el’iperpiano improprio diSn con molteplicita2.
SiaT un iperpiano diverso daZ, ne siap il polo rispetto aQ, e siaR unaretta perp, non suZ e non tangente aQ; seq = R ∩ T , e seq1 + q2 = R ∩Q, il(4.44.2) dice che (p, q, q1, q2) = −1; sep ∈ Z, ossia seT e iperpiano diametrale,e se si sceglie suR una coordinata affine tale chep, q, q1 abbiano coordinate∞, 0,1, si constata cheq2 ha coordinata−1. L’avereq1, q2 coordinate di segno oppostodice (come vedremo nell’ultima lezione) che sep viene considerato “esterno” al“segmento”q1, q2, alloraq e “interno”. Poi, se si sceglie un sistema di coordinatecartesiane ortogonali di origine inq, per le quali l’assoluto abbia ancora matriceH = 1, e tale cheq1 sia il punto(1, c, 0, . . . , 0) [possibile per il 1.13.2], il puntoq2 avra un−c in luogo di c sicche i quadrati delle distanze diq da q1 e q2 sonouguali (ed uguali ac2). Tutto cio si esprime col dire che
Teorema 4.49.3.In una quadrica a centro, ogni iperpiano diametrale dimezzalecorde aventi direzione coniugata (ossia passanti per il suopolo). Resta vero per iparaboloidi, ove in luogo di “iperpiano diametrale” si legga “iperpiano propriocon polo improprio”, il che vuol dire “iperpiano proprio passante per il punto ditangenza del paraboloide con l’iperpiano improprio”.
Fra gli iperpiani descritti (diametrali per le quadriche a centro, o passanti perecc. ecc. per i paraboloidi) vogliamo cercare queiT il cui polo p e tale che ogniretta propriaR perp (tutte parallele fra loro) sia ortogonale aT ; occorre chep eT ∩Z siano polo e polare nella polarita assoluta; seb = (b0, b
′) (conb′ 6= 0) sonole coordinate pluckeriane diT , il polo p e p = A−1b∗ (ma richiediamo chep0 =0); T ∩Z e l’iperpianob′ di Z, e noi vogliamo chep′ = H−1b′∗ = b′∗. OraAp =b∗, e dap0 = 0 segueA′p′ = b′∗, p′ = A′−1b′∗, siccheρA′−1b′∗ = b′∗, ρb′ = b′A′.I b′ sono percio gli autovettori non nulli diA′: nel caso (4.48.4) la condizionep0 = 0 da b0 = 0, ossiaT e iperpiano diametrale, come ci si aspettava; ib′ siottengono scegliendo un datoai in (4.48.4) come autovalore, poi tutti gliaj =
4Ovviamente, cambiando metrica, cambiera la forma dell’equazione del luogo di puntiequidistanti da un punto dato. [NdR]
96 Capitolo 4
ai, e siano per esempioai = ai1 , ai2 , . . . , ais , e prendendo comeb′ qualunque(b1, . . . , bn) 6= 0 in cui tutti i bj con indice fuori dell’insieme(i1, . . . , is) sononulli; in generale quando tutti gliai sono distinti si trovano esattamenten tali b′;ma in un caso estremo (sfera) tutti gli iperpiani diametralivanno bene. Comunquesia, i diametri coniugati agli iperpiani diametrali del tipo descritto si chiamanoassidella quadrica a centro; essi coincidono con le intersezioni di n− 1 qualunque fraquegli iperpiani diametriali speciali distinti. Mettendoinsieme questo col (4.49.3)si ottiene che:
Teorema 4.49.4.Ogni quadrica a centro inSn ha almeno unan-upla di assi fraloro ortogonali. I quadrati dei suoi semiassi sono i quadrati delle distanze dalcentro dei punti in cui la quadrica interseca i propri assi.
Passiamo a trattare dei paraboloidi (4.48.5); i conti fattiprima vanno modifi-cati: continua ad essere vero che il polop di T ep = A−1b∗; ma ora la condizionep0 = 0 dabn = 0; il resto dei conti va bene, ed ib′ sono gli autovettori non nullidi A′ per i qualibn = 0; per ottenereb occorre usare unb0 desunto dab∗ = Ap,ossia (per 4.48.3)b0 = bn = 0. Il resto del caso precedente, con la descrizione deirimanentibi, va bene. Ora si vede che tutti gli iperpiani trovati passanoper i punti(1, 0, . . . , 0) e (0, . . . , 0, 1), sicche essi contengono la retta passante per quei duepunti; questa e l’assedel paraboloide, ed il primo punto descritto ne e ilvertice(parola usata in senso del tutto diverso da quello del vertice di un cono; notare cheil secondo punto e proprio il vertice del conoQ ∩ Z).
4.50 Lezione 50
C’e un’ultima cosa che e bene sapere sulle coniche, dal punto di vista metrico;essa e valida per qualunqueH, e quindi fino alla formula (4.50.1) l’H sara sup-posto arbitrario. Ho detto coniche e non quadriche perche per n > 2 il discorsoche sto per fare non funziona in generale; il punto in cui non funzionerebbe lo in-dichero con un asterisco (*), lasciando il perche come esercizio. E dunquen = 2;prendiamo un punto propriop = (1, p′)∗; nel fascio di centrop, ad ogni rettab laQ fa corrispondere, per involuzione indotta nel fascio, una rettaR; questa involu-zioneπ puo essere ottenuta cosı: si trasla l’origine nel puntop mediante laM del(4.47.1) conbi = pi eM ′ = 1; la matrice diQ divieneM∗AM , e quella diQ∗ e(M∗AM)−1 quella dell’assoluto restaH perche una traslazione e un movimentorigido). Laπ e l’involuzione (= polarita) legata alla intersezione della conica in-viluppo Q∗ con b0 = 0; la matrice di tale intersezione e quella delle ultime duerighe e colonne in(M∗AM)−1 = M−1A−1M∗−1.
SeA−1 =(d0 d∗
d D
), la matrice descritta e lad0p′p′∗ − (p′d∗ + dp′∗) + D.
Bene: noi cerchiamo dei punti proprip (che chiameremofuochidella conica) peri quali l’involuzioneπ coincida con l’involuzione degli angoli retti. Quest’ultimae data dalla matriceH, sicche noi vogliamo che, per un opportunoρ 6= 0 in C, siabbia
(4.50.1) d0p′p′∗ − (p′d∗ + dp′∗) = ρH −D.

Quadriche 97
Queste sono tre equazioni fra tre incognite (*), lep1, p2, ρ, ed hanno sempresoluzioni (*). Vediamo di risolverle esplicitamente nei casi (4.48.4) e (4.48.5),sicche oraH torna ad essere= 1.
Caso (4.48.4): nella (4.50.1) si had0 = −1, dii = a−1i , e gli altri elementi di
A−1 sono0; quindi le (4.50.1) divengono
−p21 = ρ− a−11
−p1p2 = 0
−p22 = ρ− a−12
.
Dalla seconda si hap1 = 0, oppurep2 = 0; nel primo caso la prima daρ = a−11 ,
e la terza dap22 = a−12 − a−1
1 ; analogamente nell’altro caso; percio:
Teorema 4.50.2.Un cerchio ha un solo fuoco, chee il centro; un’ellisse o iperbolenon cerchio di equazione (4.48.4) ha quattro fuochi, e precisamente(1, 0,±[a−1
2 −a−11 ]1/2) e (1,±[a−1
1 − a−12 ]1/2, 0). Di questi, due sono razionali suC e due no.
Caso (4.48.5): si had2 = −1, d11 = a−11 , e gli altri elementi diA−1 sono
nulli; percio le (4.50.1) divengono
0 = ρ− a−11
p1 = 0
2p2 = ρ
.
Dalla prima,ρ = a−11 , sicchep2 = 1
2a1:
Teorema 4.50.3.Una parabola di equazione (4.48.5) ha un solo fuoco; essoerazionale suC, ede dato da(1, 0, 1
2a1).
4.51 Lezione 51
In quanto precede, specie nella lezione48, l’S1 e piuttosto trascurato; l’assolutodi S1 dovrebbe essere una quadrica inZ, maZ e un punto, il solitoP∞, e non haquadriche; cio e giusto, perche una metrica nello spazioaffineA1 e data, a menodell’unita di misura, non appena sia datoP∞, per il semplice motivo che in unospazio vettoriale di dimensione1 vi e una sola norma a meno di proporzionalita;ed anzi, ogni tale spazio e orientabile, sicche si puo definire non solo il quadratodella lunghezza di ogni vettore, ma anche la lunghezza, che `e cio che sarebbe chia-mato il volume in dimensione> 1 (parlo sempre di unC ordinato). Se si prende ladistanza fra unP0 ed unP1 come unita di misura, ecco chex = (P∞,P0,P1,X)e la lunghezza del vettoret = X − P0 ∈ T .
Questo e in accordo con la nostra intuizione quando l’S1 lo pensiamo propriocome retta; ma fra gliS1 ci sono anche i fasci di rette del piano, e per questiS1 lacostruzione descritta sarebbe la seguente: si fissa una rettar∞, poi l’“angolo” r0r1come unita di misura; dopodiche la “lunghezza” di un angolo r0x e (r∞, r0, r1,x).

98 Capitolo 4
La misura cosı ottenuta non e pero affatto quella normalmente usata; diviene unatalvolta usata quandor∞ ed r0 siano ortogonali (nel senso familiare solito), er1 sia la bisettrice dir∞r0: allora la misura descritta e il cosiddettocoefficienteangolaredi r0x, ossiatan r0x. L’altra misura, quella in gradi o in radianti, nonsalta affatto fuori dalle nostre lucubrazioni; ed anzi, gliunici angoli dei quali si eparlato nel corso sono i retti. Questo ci fa sospettare che negli S1 ci debba essereun altro tipo di “metrica”, che non rientra fra quelle sulle quali abbiamo spesotanto tempo.
Osserviamo che, fissata inS1 una quadricaQ = P1 + P2, conP1 6= P2, e trepuntiX, Y , Z, si ha
(P1,P2,X,Y )(P1,P2,Y ,Z) = (P1,P2,X,Z),
come conseguenza di (2.25.2). Percio questo birapporto (P1,P2,X,Y ) ha quasila proprieta di una “distanza”, nel senso che la distanza fra X eZ e il prodotto,invece che la somma, della distanza fraX eY e di quella fraY eZ. Il trucco perpassare dai prodotti alle somme e il logaritmo; mettiamociquindi nel caso in cuiC = R, e scriviamod(X,Y ) = k log (P1,P2,X,Y ), conk numero complessonon nullo per ora arbitrario; questa espressione ha sempre significato se l’insiemeP1, P2,X, Y consta di almeno tre punti distinti (si intende chelog∞ = ∞ elog 0 = −∞). Ora i casi sono due:
1. P1 eP2 reali, ossia razionali suC; essi dividonoS1 in duesegmenticosı definiti:scelto unX ∈ S1, X /∈ P1, P2, un segmento e formato dagliY /∈ P1, P2tali che (P1,P2,X,Y ) > 0; l’altro da quelli per cui quel birapporto e< 0; sicontrolla subito che la definizione e indipendente dalla scelta diX. Nel secondocaso diremo cheX,Y separanoP1, P2 (questo e lo stesso discorso fatto nellalezione 46, ove due piani spezzanoS3 in due pezzi). SeX,Y sono sullo stessosegmento, vi e un sololog (P1,P2,X,Y ) reale, determinato a meno del segno(per 2.25.1) perche nella quadricaQ non si sa chi siaP1 e chiP2. Preso perkun reale non nullo, e fissato un orientamento col dire quale sia P1 e qualeP2
(questo da proprio un orientamento dello spazio vettoriale soprastante adS1,nel senso della lezione 15), lad(X,Y ) funziona benissimo come distanza. Duepunti dello stesso segmento hanno distanza reale, che e nulla se, e solo se,X =Y ; e d(X,Z) = d(X,Y ) + d(Y,Z); poi d(P1,X) = −∞, d(P2,X) = +∞;se inveceX,Y sono in segmenti diversi, ilk log (P1,P2,X,Y ) e complessonon reale, ed e determinato a meno di multipli interi di2kπi, ovei2 = −1 eπe il numero di Archimede. Una siffatta definizione di distanza da unametricaiperbolicadi S1.
2. P1, P2 non reali, e quindi con ascisse complesse coniugate; il (2.25.2) da allorache, per ogni coppiaX, Y di punti reali, e quindi diversi daP1, P2, il birapporto(P1,P2,X,Y ) e il rapporto fra due numeri complessi coniugati non reali; il suologaritmo e percio puramente immaginario, e definito a meno di multipli interidi 2πi (ed anche a meno del fattore±1 se non si stabilisce chi siaP1 e chiP2).Sceltok = hi con h reale, e fissatiP1, P2, ecco ched(X,Y ) e reale, ma edefinita a meno di multipli interi di2hπ. Una siffatta distanza da unametrica

Quadriche 99
ellittica suS1, e 2hπ e l’ampiezzadi S1. E questa, conh = 1 la metrica (inradianti) usualmente adottata per la misura degli angoli.
Le due metriche descritte si chiamanonon euclidee; tutte quelle descritte nelresto di questo corso sonoeuclidee, ovviamente in un senso diverso da quellodato nela lezione 17. Le euclidee possono anche essere chiamateparaboliche, inquanto casi limite (perP1 = P2) delle non euclidee. Facciamolo vedere, partendoper esempio dal caso iperbolico (la partenza da quello ellittico funziona nellostesso modo).
Le coordinate ascisse diP1, P2 sianoz e −z, con z > 0; quelle diX, Y ,sianox, y; e si prendak = hz; si ha
d(X,Y ) = k log (z,−z,x,y) = hz log(x− z)(y + z)
(x+ z)(y − z),
che e reale se|x|, |y| sono ambedue< z. Quandoz tende a∞ (col cheP1,P2 vengono a coincidere conP∞), questa espressione tende al valore2h(y − x)(regola di l’Hospital), che e appunto la distanza frax ed y in una metrica dellesolite.
In tutto il corso, riferendosi al cason = 2, si e data una metrica nel pianoper mezzo di un assoluto consistente in una conica inviluppodegenere, a supportoriducibile; essa definisce su ogni retta non appartenente alla conica una metricaparabolica, fissata dal punto improprio (intersezione della retta col vertice del-l’assoluto) e da una unita di misura variabile da retta a retta, e determinata dallaposizione del punto improprio rispetto ai punti ciclici; mentre su ogni fascio acentro proprio definisce una metrica non euclidea, ellittica se i punti ciclici sononon reali, e iperbolica altrimenti. Si sarebbe potuto invertire il ruolo retta-fascio,dando come assoluto una conica non degenere (ed allora che sia luogo o invilupponon interessa piu), si ottengono metriche non euclidee siasulle rette che sui fasci.Sono queste lemetriche non euclideedel piano, che sono ellittiche o iperbolichesecondoche l’assoluto non ha o ha punti reali. Da notare chesono metriche non diun piano affine, ma di tutto il piano proiettivo, esclusi, nelcaso iperbolico, i puntireali (risp. le rette reali) dell’assoluto come centri di fasci (risp. come sostegni dipunteggiate). Tuttavia, sempre nel caso iperbolico, per evitare punti con distanzenon reali, si preferisce limitarsi a considerare solo la porzione di piano formatadai punti interni all’assoluto (o meno frequentemente soloda quelli esterni); ledefinizioni sono le seguenti: un punto (retta) einternoaQ se intanto/∈ Q (/∈ Q∗),e se inoltre le due rette diQ∗ (i due punti diQ) per il punto (sulla retta) non sonoreali; eesternose non e ne interno, ne suQ (suQ∗). SeQ ha punti reali, ogni retta(punto) per un punto interno (su una retta interna) e esterno, e reciprocamente.
Nel caso ellittico, due rette qualunque s’incontrano sempre, ossia non ci so-no parallele; nel caso iperbolico (ma solo punti interni), ogni rettaR ha, per unpuntoP fuori di essa, due “parallele”, che sono le rette passanti per P e per,rispettivamente, le due intersezioni diR con l’assoluto.
Storicamente, le geometrie non euclidee nacquero dal tentativo, sempre anda-to a vuoto, di far discendere il quinto postulato di Euclide (quello delle parallele)

100 Capitolo 4
dai precedenti; i postulati venivano considerati “veritapalesi”, ed il quinto sem-brava meno palese degli altri (ora sappiamo che sono tutti arbitrari). Falliti tuttii tentativi, nel secolo scorso un rampollo di famiglia militare ungherese (Bolyai)e un insegnante di matematica russo (Lobacevski) si provarono a spingere alleestreme conseguenze la negazione del quinto postulato; il primo non ammettendonessuna parallela5, ed il secondo ammettendone due. Ottennero, invece del para-dosso in cui speravano, la geometria ellittica e iperbolicarispettivamente; si seppepoi che Gauss, il piu insigne dei matematici allora viventi, aveva gia trovato, conmetodi differenziali, quei due risultati e molti altri; diciamo anzi che il non rag-giungimento di paradossi da parte di Bolyai e Lobacevski nonbastava affatto adimostrare che le loro geometrie erano possibili; per fare questo occorreva unacostruzione basata su enti di provata serieta, quali i numeri reali; e appunto cioche il metodo di Gauss (o quello esposto in questo corso) riuscı ad ottenere.
5Non e vero che Bolyai non ammettesse nessuna parallela; sialui che Lobacevski neammettevano due, e trovavano la geometria iperbolica (notadell’Autore).
ALa versione del 1969/70
La dispensa trascritta nelle pagine precedenti e una sortadi “punto d’arrivo” deitentativi compiuti da Barsotti –giunto a Padova nel 1968– per definire e delimitarei contenuti del corso di Geometria 2. Una prima versione fu ladispensa dell’AnnoAccademico 1969/70, che circolo con varie aggiunte e correzioni. Quella dispensaconteneva 60 lezioni cosı suddivise:
parte I,Complementi sugli spazi vettoriali; lezz.1–12;parte II,Algebra Omologica; lezz. 13–25;parte III,Spazio Proiettivo; lezz. 26–37;parte IV,Matrici; lezz 38–48;parte V,Quadriche; lezz. 49–60.
Come si vede la gran parte degli argomenti e stata ripresa con modifiche e amplia-menti nella versione che abbiamo riportato, con l’esclusione dei contenuti dellaparte II a cui Barsotti ha dovuto rinunciare, credo per motivi di tempo, vista anchela riduzione operata nel numero delle lezioni. Riprodurre qui tutta la dispensami sembrerebbe uno scrupolo filologico degno di miglior causa; puo essere inve-ce interessante riproporre la sezione omessa per evidenziare anche in questo casol’originalita e la abilita nella presentazione della materia che caratterizzano lo stiledi Barsotti.
A.13 Lezione 13
Questo titolo (Algebra Omologica) descrive un metodo per maneggiare certe si-tuazioni un po’ complicate che si presentano spesso; il metodo in se non costruiscenulla, ed e essenzialmente un linguaggio; solo i primissimi elementi vengono quiesposti. Premettiamo qualche definizione che fa parte di altre teorie (cfr. lezioni33, 34, 37, 38 di [AA]). Sia A un anello, che supporremo sempre commutativo edotato di identita; unA-modulo (sinistro) e un insiemeM , con una operazione+(m + n ∈ M perm,n ∈ M ), ed una operazione di prodotto scalare (am ∈ Mper a ∈ A edm ∈ M ) soddisfacenti a tutti gli assiomi che dovrebbero veniresoddisfatti seA fosse un corpo edM uno spazio vettoriale suA; in effetti, seAe un corpo, unA-modulo e proprio uno spazio vettoriale. I nostriA-moduli si

102 Appendice A
supporranno sempreunitari, ossia tali che1m = m perm ∈ M (1 e l’identita diA). Le definizioni di omomorfismi, isomorfismi, somma complementare, ecc., diA-moduli possono essere immaginate; valgono i tre teoremi diomomorfismo; sipuo anche immaginare cosa sia un insieme di generatori di unA-modulo. NegliA-moduli si puo parlare di elementi linearmente dipendentio indipendenti (suA),e si puo parlare di combinazioni lineari; non e pero piu vero che se certi elementisono linearmente dipendenti, uno di essi debba essere combinazione lineare deglialtri; quindi non si puo parlare di “base” o di “dimensione”.
Un A-modulo generato da elementi indipendentix1, x2, . . . dicesi libero oliberamente generatodagli xi, e gli xi sono i suoigeneratori liberi (il fatto diaver indicizzato glix con gli interi non sta ad indicare che essi siano al piu un’in-finita numerabile). UnA-modulo generato da un numero finito di elementi dicesifinitamente generato, od anchefinito; uno con un solo generatore dicesicicli-co; uno senza sotto-A-moduli propri 6= 0 dicesisemplice; vale il teorema diJordan-Holder.
Nell’algebra omologica conviene spesso pensare ad un omomorfismof di unA-moduloM in unoN come ad un ente che porta con se i moduli di partenza edi arrivo; l’immaginefM sara allora indicata conimf ; pertanto la restrizione dif daM ad imf = fM e un altro omomorfismo (seimf ⊂ N ), per esempiog;taleg e suriettivo, mentref non lo era. Una successione (finita o no)
. . .M1f1 // M2
f2 // M3 . . . ,
ove gliMi sonoA-moduli e glifi omomorfismi, dicesiesattase per ognii per ilqualefi edfi+1 esistono si haimfi = kerfi+1; per esempio, la
0 → Mf // N
g // P → 0
e esatta se, e solo se,f e iniettivo, g e suriettivo, eP = N/M dopo opportuneidentificazioni.
A.14 Lezione 14
Premesso tutto questo, e premesso anche che spesso chiamemremo freccia unomomorfismo, si ha:Lemma A.14.1.Se nel diagramma
0 // M //
N //
P
// 0
0 // M ′ // N ′ // P ′ // 0
,
in cui le successioni orizzontali sono esatte, manca la prima, o l’ultima, frecciaverticale, ed il diagramma quadrato rimanentee commutativo, allora la frec-cia mancante puo essere introdotta in modo unico se si richiede che tutto ildiagramma ottenuto sia commutativo.

La versione del 1969/70 103
Dim. banale. C.V.D.
Un A-modulograduatoe un moduloM che sia somma diretta diA-moduliMi: M = · · · ⊕Mi−1 ⊕Mi ⊕Mi+1 · · · (la somma puo essere finita da una parteo da ambedue se ci si mettono degli zeri); gli elementi diMi diconsi digrado i(talvolta didimensionei). Un omomorfismo di grador dell’A-modulo graduatoM sull’ M ′ e un omomorfismof che mandiMi suM ′
r+i; la restrizione dif adMi si usa indicare confi.
Un complesso(o A-complesso) e unA-modulo graduatoM , dotato di unendomorfismod di grado1 (o −1), tale chedd = 0, ossia tale cheimdi−1 ⊆kerdi:
· · · // Mi−1di−1 // Mi
di // Mi+1// . . . .
Vi e una nomenclatura psicologica legata ai complessi: spesso se le frecce siscrivono con la punta a destra (ossia sed ha grado1) si parla di “coomologia”, ese con la punta a sinistra (ossia sed ha grado−1) di “omologia”; di fatto, se si fauna teoria e poi la si dualizza, si premette un “co” a tutte le parole, o si toglie sec’era gia; si usano anche scrivere gli indici in alto quandoc’e il “co”, e in bassoquando non c’e; non sempre useremo queste convenzioni.
Gli elementi diMi diconsi lecatene(cocatene) di dimensionei; i di sono glioperatori dibordoocontorno(cobordoococontorno), od anche ledifferenziazioni(codifferenziazioni). Se gliMi sono liberi; e in ognuno e fissato un insieme digeneratori liberi, questi si chiamano talvolta lecelleo simplessidi dimensionei.Si poneZi(M) = kerdi ⊆ Mi, ed i suoi elementi si chiamano icicli (cocicli)di dimensionei; si pone ancheBi(M) = imdi−1 ⊆ Mi, e i suoi elementi sichiamano ibordi (cobordi) di dimensionei. L’A-moduloZi/Bi = Hi(M) e l’i-esimo gruppo di omologia(coomologia). Sono quindi esatte la riga e la colonnadel seguente diagramma, dovedB e la restrizione did daM aB.
0
Bi
0 // Zi
// MidB // Bi+1
// 0 .
Hi
0

104 Appendice A
La somma diretta degliHi e unA-modulo graduato che si indica conH(M) e sichiama l’omologia(coomologia) di M :
0
B
0 // Z
// MdB // B // 0 (riga e colonna esatte).
H
0
Se in una teoria si usano sia delle omologie, con indice in basso, che delle coo-mologie, con indice in alto, l’H omologico si indica conH∗, quello coomologicoconH∗.
Un omomorfismog di grador di un complessoM su unoM ′ e un omomor-fismo siffatto di moduli graduati che renda commutativo il diagramma
(A.14.2) Md //
g
M
g
M ′d′
// M ′
Per mezzo di essi si definiscono isottocomplessi(bisogna che0 // Mg // M ′
sia esatta), e leimmagini (bisogna cheMg // M ′ // 0 sia esatta); notare
che0 e il complesso conMi = 0 per ognii.
A.15 Lezione 15
L’operatoreH fa passare dai complessi agliA-moduli graduati; esso e “funtoria-le”, nel senso che fa anche passare dagli omomorfismo fra complessi agli omo-morfismi fraA-moduli graduati, come ora spieghiamo: abbiasi l’omomorfismo
Mg // M ′ , e consideriamo il diagramma
(A.15.1) 0 // B //
gB
Z //
gZ
H //
gH
0
0 // B′ // Z ′ // H ′ // 0
,

La versione del 1969/70 105
ove il gH a priori manca; qui,gB e la restrizione dig a B, che esiste per lacommutativita di (A.14.2), egZ quella dig aZ. Poiche le righe sono esatte, ilgHesiste per (A.14.1) se si vuole che il diagramma resti commutativo (lo e senza ilgH ); questogH e appunto l’omomorfismo diH suH ′ che corrisponde alg di MsuM ′.
Teorema A.15.2(fondamentale dell’omologia). Sia
0 // M ′ f // Mg // M ′′ // 0
una successione esatta, conM ,M ′,M ′′, complessi, edf, g di grado0; se alloraσe l’omomorfismo canonico diZ suH, esiste l’omomorfismoh = σ′f−1
Z dg−1Z σ′′−1
di H ′′ in H ′, ed esso ha grado1 e rende esatta la successione
H ′ fH // H
gH
H ′′h
aaCC
C
C
C
C
C
C
.
Dim. Sez′′ ∈ Z ′′, siay ∈ g−1z′′ ∈ M , determinato a meno di elementi inkerg =imf ; inoltre d′′gy = d′′z = 0, ondegdy = 0, edy ∈ kerg = imf , determinatoa meno di elementi did(imf) = fB′. Esiste unoz′ ∈ M ′ tale chefz′ = dy,ed e determinato a meno di elementi diB′, ed anzi,fd′z′ = dfz′ = ddy = 0,sicchez′ ∈ Z ′. L’immagine diz′ in H ′ e ora univocamente determinata, e si ecosı definito un omomorfismoh∗ di Z ′′ in H ′, di grado1. Si puo cosı scrivere ilseguente diagramma commutativo a righe esatte (oveh e stato aggiunto a normadel (A.14.1), eι e l’identita):
0 // B′′ //
Z ′′ //
h∗
H ′′ //
h
0
0 // 0 // H ′ι
// H ′ // 0
che ci da la costruzione dih.Ora per l’esattezza del diagramma dell’enunciato:
1. E gHfH = σ′′gZσ−1σfZσ′−1 = σ′′gZfZσ′−1, per (A.15.1); questo e0 perche
gZfZ = 0; quindi imfH ⊆ kergH . Poi, seσx ∈ kergH , conx ∈ Z, deveessereσ′′gZx = gHσx = 0, gZx ∈ B′′ = gB, x ∈ Z ∩ [B + fM ′] =Z ∩ fM ′ = fZ ′, ondeσx ∈ σfZ ′ = fHσ′Z ′ = imfH .
2. E hgH = σ′f−1Z dg−1
Z σ′′−1σ′′gZσ−1 = σ′f−1Z dσ−1 = 0 perchedσ−1 = 0;
percio imgH ⊆ kerh. Poi seσ′′gx ∈ kerh, conx ∈ g−1Z ′′, si deve avereσ′f−1dx = 0, f−1dx ⊆ B′, dx ∈ fB′ = fd′M ′ = dfM ′, x ∈ fM ′ + Z,gx ∈ gZ, σgx ∈ σgZ = gHH = imgH .

106 Appendice A
3. E fHh = σfZσ′−1σ′f−1
Z dg−1Z σ′′−1 = σdg−1
Z σ′′−1 = 0 perche quindiimh ⊆kerfH . Se poiσ′x ∈ kerfH , conx ∈ Z ′, si avraσfx = 0, fx ∈ B, x ∈f−1[dM ∩ fZ ′]. Consideriamo uny ∈ M tale chedy ∈ fZ ′; per un taley ed′′gy = gdy = 0, ondegy ∈ Z ′′, y ∈ g−1Z ′′; pertantox ∈ f−1dg−1Z ′′, eσ′x ∈ σ′f−1dg−1σ′′−1H ′′ = imH.
C.V.D.
A.16 Lezione 16
Per parecchi moduli e definita un’applicazioneord , dei moduli stessi sugli interi,o in generale su un gruppo abelianoΓ, che soddisfa la condizione seguente: se0 → M → N → P → 0 e esatta,ordN esiste se, e solo se, esistonoordM edordP ; e si ha inoltreordN = ordM+ordP . Esempi sono l’ordine di un gruppofinito abeliano (che e unA-modulo conA = anello degli interi); la dimensione diuno spazio vettoriale di dimensione finita.
Bene, seM e un complesso, e se vi e un’applicazione “ord ” per i suoiHi,e se inoltre gliHi sonoquasi tutti0 (ossia tutti eccetto al piu un numero finito),l’elemento diΓ dato da
(A.16.1) χ(M) =∑
i
(−1)iordHi
si chiama lacaratteristica di Eulero-Poincare di M ; l’ ordHi e l’i-esimonumerodi Betti di M .Teorema A.16.2.Nelle notazioni precedenti, seordMi esiste per ognii, se enullo per quasi tutti glii, e seHi = 0 per quasi tutti gli i, si ha χ(M) =∑
i(−1)iordMi.Dim. L’esattezza di0 → Zi → Mi → Bi+1 → 0 dice che esistonoordZi edordBi+1, e cheordMi = ordZi+ordBi+1. Poi, l’esattezza di0 → Bi → Zi →Hi → 0 dice cheordHi esiste, e cheordZi = ordBi + ordHi. In conclusione,ordMi = ordBi + ordHi + ordBi+1; moltiplicando per(−1)i e sommando siha il risultato. C.V.D.
A.17 Lezione 17
Possiamo subito dare un esempio, semplice ma fondamentale,di quanto precede;basta munirsi di un anelloA e di un insieme finitoF ; occorre pero prima unadefinizione: fra gli ordinamenti diF puo porsi una relazione di equivalenza coldefinireα ∼ β se, e solo se, la permutazione che cambiaα in β e pari, ossiadi segnatura1 (cfr. lezione 45 di [AA]). Le due classi in cui questa equivalenzaripartisceF si dicono gliorientamentidi F , edF con un orientamento e unin-sieme orientato. Da notare che un orientamento diF non definisce (a differenzadegli ordinamenti) degli orientamenti nei sottoinsiemi: gli ordinamenti(a, b, c),

La versione del 1969/70 107
(b, c, a) di a, b, c appartengono allo stesso orientamento, ma inducono ina, cordinamenti appartenenti a orientamenti diversi. Peri = 0 edi = 1 la definizionecade; diremo che∅ non ha orientamenti, e che gli insiemi di cardinalita1 hannoun solo orientamento. Dati alloraA edF , cominciamo con l’ordinareF , e con-sideriamo l’A-moduloM ′
i i cui generatori liberi sono i sottoinsiemi ordinati diFdi cardinalitai+1; questo peri = 0, 1, . . . , n sen+1 = cardF ; poniamo ancheM ′
i = 0 per gli altri valori dii. PostoM ′ =⊕
iM′i , M
′ diviene un complessocol definire il bordod∗ (di grado−1) cosı:
d′∗(s0, . . . , si) =∑
j
(−1)j(s0, . . . , sj , . . . , si),
ove il cappuccio susj significa chesj va saltato (si verifichi ched′∗d′∗ = 0). Non
e pero questo il complesso che ci interessa; se indichiamocon (s0, . . . , si) nonl’insieme ordinato, ma quello orientato (secondo l’orientamento cui quell’ordina-mento appartiene), e se inoltre identifichiamo(s1, s0, . . . , si) con−(s0, . . . , si),quandoi ≥ 1, in luogo diM ′
∗, d′∗ otteniamo gliM∗, d∗; verificare che ild∗ e bendefinito dalla stessa formula1, ossia dalla
(A.17.1) d∗(s0, . . . , si) =∑
j
(−1)j(s0, . . . , sj , . . . , si).
Gli (s0, . . . , si) orientati (con ciascuno dei due orientamenti, ossia i±(s0, . . . , si)se i > 0) sono i simplessidel complesso costruito (detto talvoltacomplessosimpliciale discendentedi F ).
Facciamo un altro giochetto: siaM i l’A-modulo delle applicazioni alternan-ti di S × · · · × S (i + 1 fattori) suA (ed M i = 0 se i < 0); una φ dicesialternantese cambia segno quando si scambiano fra loro due argomenti, eseinoltre vale0 quando due argomenti coincidono (questo va detto per il casodel-la caratteristica2); se i = 0 ogni φ si considera alternante. QuestoM i non ealtro che HomA (Mi, A), e ne e ilduale secondo una definizione di dualita fraA-moduli perfettamente analoga a quella per spazi vettoriali (cfr. lezione 42 di[AA]); anzi, essendo i moduli in questione liberi e finiti, resta anche vero (eserci-
zio!) che il duale diM i eMi. PostoM∗ =⊕
iMi, il M∗
d∗ // M∗ ha un duale
M∗ M∗d∗
oo dato dad∗x y = x d∗y (x ∈ M∗, y ∈ M∗; “” e l’operazione
di dualita), ossia da:
(A.17.2) (d∗φ)(s0, . . . , si) =∑
j
(−1)jφ(s0, . . . , sj, . . . , si).
Questod∗ e un operatore di cobordo di grado1, edM∗ e un complesso,dualediM , dettocomplesso simpliciale ascendentedi F ; i simplessidi M i sono iφ chemandano un(s0, . . . , si) su1 e tutti gli altri, escluso−(s0, . . . , si), su0.
1[Nota dell’Autore]: tutto questo si puo dire piu ampollosamente ma meno chiaramente se sivuole evitare l’uso della parola imprecisa “identificare”;provarcisi per esercizio

108 Appendice A
Le definizioni precedenti possono essere messe in altra lucesfruttando i pro-dotti esterni; questi sono stati definiti solo per gli spazi vettoriali, ma e chiaro chele loro prime proprieta valgono anche per gliA-moduli liberi finiti. L’insiemeorientato(s0, . . . , si) non e altro che il prodotto esternos0 ∧ · · · ∧ si di elementidi M0; insomma,Mi = M0 ∧ · · · ∧M0, i+ 1 volte; seF = (x0, . . . , xn), orien-tato, la base duale, inM0, della x0, . . . , xn, e data daglix0, . . . , xn tali chexi xj = δij (scriviamoxi xj in luogo dixixj); ed alloraM i = M0∧ · · · ∧M0
(i+1 volte), con la dualita(s0∧· · ·∧si)(t0∧· · ·∧ti) = (s0∧· · ·∧si)(t0, . . . , ti)(cfr. l’analogo 1.5.7). Postoy∗ = x0 + · · ·+ xn ∈ M0, la (A.17.2) diviene
A.17.3.Perx∗ ∈ M∗, si had∗x∗ = y∗ ∧ x∗.
La (A.17.1) non si presta ad interpretazione altrettanto semplice senza in-trodurre nuovi concetti. Comunque la (A.17.3) ci permette di trovare subito lacoomologia diM∗; infatti, scegliamo intanto come insieme di generatori liberi diM0 gli elementiy∗, x∗1, . . . x
∗n (il che e possibile); allora:
Z0 e liberamente generato day∗, B0 = 0 ondeH0 ∼= Z0;Zi (per 0 < i ≤ n) e liberamente generato dagliy∗ ∧ x∗σ1
∧ · · · ∧ x∗σicon
(σ1, . . . , σi) sottoinsieme ordinato di(1, . . . , n), Bi = Zi, ondeH i = 0.
Dualizziamo (e possibile in questo caso particolare):
Z0 = M0, B0 =(ortogonale diy∗ in M0) = modulo liberamente generato dax1, . . . , xn, ondeH0
∼= A;Zi =(ortogonale diBi in Mi) e liberamente generato daglixτ1 ∧ · · · ∧ xτi per0 < i < n, Bi = Zi, ondeHi = 0. Zn = 0, Bn = 0, ondeHn = 0.
Vediamo che cos’e la caratteristica di Eulero-Poincare di M∗ edM∗; intantooccorre una funzione “ord ” valida per gliMi, Zi, Bi, Hi; ora, in generale unatale funzione non c’e; ma se, come in questo caso, i moduli sono tutti liberi finiti,e inoltre si richiede la validita dellaordN = ordM + ordP solo per quelle0 → M → N → P → 0 esatte per le qualiN = M ⊕ P (ed e cosı in questocaso), si puo prendereordM = numero dei suoi generatori liberi. Allora si vedesubito, per (A.16.1), che
(A.17.4) χ(M∗) = χ(M∗) = 1.
Controlliamo il (A.16.2): si dovrebbe avere
1 =n∑
i=0
(−1)i(n+ 1
i+ 1
);
e infatti la somma e1− (1− 1)n+1 = 1.
La versione del 1969/70 109
A.18 Lezione 18
Quanto esposto nella Lezione 17 e, sı, un’applicazione della omologia, ma in sepuo sembrare un gioco complicato su enti piuttosdto semplici, gli insiemi finiti.La sua vera applicazione e quella che segue, che e poi quella che ha originatotutta la teoria. Si dovrebbe cominciare con uno spazio affine, ma siccome nonne abbiamo ancora parlato prenderemo uno spazio vettorialeV di dimensionen+1 sui realiR; sev0, . . . , vi sono suoi elementi linearmente indipendenti (ondei ≤ n), chiameremosimplessoin V (di dimensionei), conscheletrov0, . . . , vi,quello che in uno spazio affine sarebbe l’(i + 1)-edro di verticiv0, . . . , vi e chequi definiamo cosı: il simplesso e l’insieme
x | x ∈ V, x = α0v0 + · · · + αivi, αj ∈ R, αj > 0, α0 + · · ·+ αi = 1 ;
invece, unsimplesso orientatosara l’insieme di un simplesso e di un orientamen-to del suo scheletro. Lefaccedel simplesso sono i simplessi il cui scheletro esottoinsieme non vuoto dello scheletro del simplesso (ivi compreso il simplessostesso ed i suoivertici).
Pongasi inV una norma ellittica definita positiva (cfr. lezione 14); l’applica-zionev 7→ √
v v (≥ 0) diviene una metrica inV nel senso della topologia, cherendeV omeomorfo aR × · · · × R (n + 1 fattori; prodotto topologico;R con lasolita topologia). In tal caso si vede subito che la chiusuradi un simplesso non ealtro che l’unione di tutte le sue facce.
Sia alloraS uno spazio topologico; diremocella di dimensionei di S l’entecostituito da:
1. L’immagine omeomorfaE′ di un simplessoE di dimensionei (di qualcheV didimensione≥ i+ 1), in un omeomorfismoα di E (chiusura diE) suS;
2. L’insieme delleα-immagini dei vertici diE, detto loscheletrodella cella;
notare che la cella non e l’unione di1 e 2, ma e l’insieme di1 e 2; spessochiameremo “cella” semplicemente l’aperto descritto in1.
UnatriangolazioneK suS e un insieme finito di celleE′′j = (E′
j , scheletro)tale che gliE′
j siano a 2 a 2 disgiunti, e che se una cella appartiene aK, ancheogni sua faccia vi appartenga. SeK e una triangolazione, l’unione degli sche-letri delle sue celleE′′
j e una unione di simplessi nel senso della lezione 17 (diquesta appendice); si puo costruire l’A-modulo liberoK∗ che li ha per generatoriliberi, e taleK∗ diviene un complesso nel senso della lezione 14 (sempre di que-sta appendice) per mezzo deld∗ di (A.17.1); analogamente si definisce ilK∗ col(A.17.2); essi danno (mediante gliH∗ edH∗) l’ omologiae coomologiadi K; seK copre tutto S, ossia seS e l’unione degliE′
j , l’omologia e la coomologia diK sono ovviamente degli invarianti per omeomorfismo diS; se capita che questiinvarianti siano indipendenti dalla scelta della triangolazione, ovvero indipenden-ti da tale scelta purche la triangolazione soddisfi a certe condizioni topologiche,allora tali invarianti sono invarianti topologici diS, e l’omologia e coomologiasono l’omologiaecoomologiadi S.
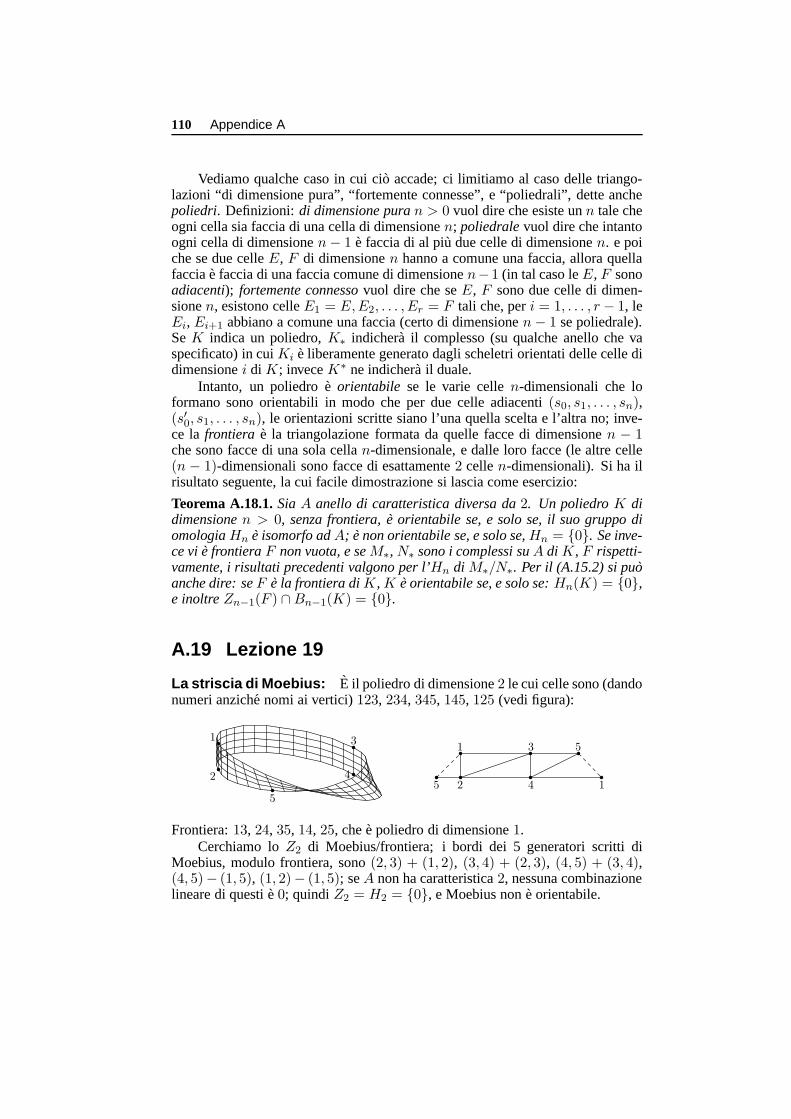
110 Appendice A
Vediamo qualche caso in cui cio accade; ci limitiamo al casodelle triango-lazioni “di dimensione pura”, “fortemente connesse”, e “poliedrali”, dette anchepoliedri. Definizioni: di dimensione puran > 0 vuol dire che esiste unn tale cheogni cella sia faccia di una cella di dimensionen; poliedralevuol dire che intantoogni cella di dimensionen− 1 e faccia di al piu due celle di dimensionen. e poiche se due celleE, F di dimensionen hanno a comune una faccia, allora quellafaccia e faccia di una faccia comune di dimensionen−1 (in tal caso leE, F sonoadiacenti); fortemente connessovuol dire che seE, F sono due celle di dimen-sionen, esistono celleE1 = E,E2, . . . , Er = F tali che, peri = 1, . . . , r − 1, leEi, Ei+1 abbiano a comune una faccia (certo di dimensionen− 1 se poliedrale).SeK indica un poliedro,K∗ indichera il complesso (su qualche anello che vaspecificato) in cuiKi e liberamente generato dagli scheletri orientati delle celle didimensionei di K; inveceK∗ ne indichera il duale.
Intanto, un poliedro eorientabile se le varie cellen-dimensionali che loformano sono orientabili in modo che per due celle adiacenti(s0, s1, . . . , sn),(s′0, s1, . . . , sn), le orientazioni scritte siano l’una quella scelta e l’altra no; inve-ce la frontiera e la triangolazione formata da quelle facce di dimensionen − 1che sono facce di una sola cellan-dimensionale, e dalle loro facce (le altre celle(n − 1)-dimensionali sono facce di esattamente2 cellen-dimensionali). Si ha ilrisultato seguente, la cui facile dimostrazione si lascia come esercizio:
Teorema A.18.1.SiaA anello di caratteristica diversa da2. Un poliedroK didimensionen > 0, senza frontiera,e orientabile se, e solo se, il suo gruppo diomologiaHn e isomorfo adA; e non orientabile se, e solo se,Hn = 0. Se inve-ce vie frontieraF non vuota, e seM∗, N∗ sono i complessi suA di K, F rispetti-vamente, i risultati precedenti valgono per l’Hn di M∗/N∗. Per il (A.15.2) si puoanche dire: seF e la frontiera diK, K e orientabile se, e solo se:Hn(K) = 0,e inoltreZn−1(F ) ∩Bn−1(K) = 0.
A.19 Lezione 19
La striscia di Moebius: E il poliedro di dimensione2 le cui celle sono (dandonumeri anziche nomi ai vertici)123, 234, 345, 145, 125 (vedi figura):
3
4
1
2
5
1 3 5
5 2 4 1
Frontiera:13, 24, 35, 14, 25, che e poliedro di dimensione1.Cerchiamo loZ2 di Moebius/frontiera; i bordi dei 5 generatori scritti di
Moebius, modulo frontiera, sono(2, 3) + (1, 2), (3, 4) + (2, 3), (4, 5) + (3, 4),(4, 5)− (1, 5), (1, 2)− (1, 5); seA non ha caratteristica2, nessuna combinazionelineare di questi e0; quindiZ2 = H2 = 0, e Moebius non e orientabile.
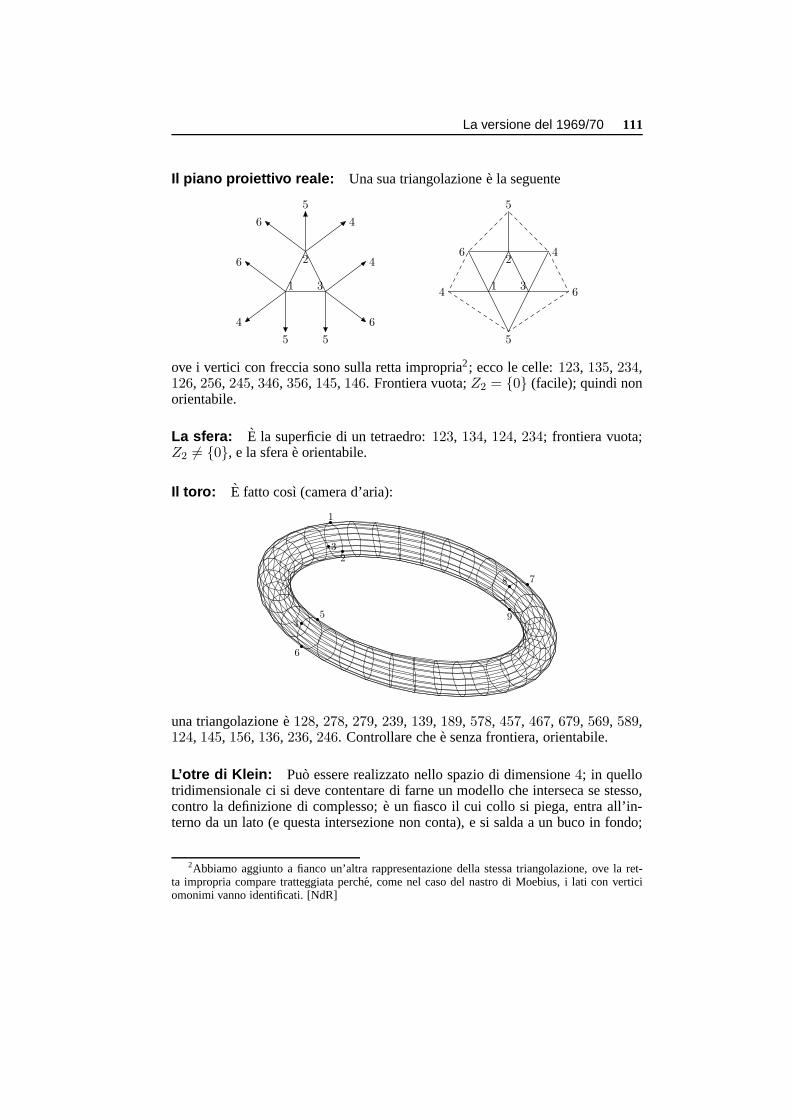
La versione del 1969/70 111
Il piano proiettivo reale: Una sua triangolazione e la seguente
5
6 4
26 4
1 3
4 6
5 5
1
2
34
5
6
4
5
6
ove i vertici con freccia sono sulla retta impropria2; ecco le celle:123, 135, 234,126, 256, 245, 346, 356, 145, 146. Frontiera vuota;Z2 = 0 (facile); quindi nonorientabile.
La sfera: E la superficie di un tetraedro:123, 134, 124, 234; frontiera vuota;Z2 6= 0, e la sfera e orientabile.
Il toro: E fatto cosı (camera d’aria):
1
32
4
6
5
7
9
8
una triangolazione e128, 278, 279, 239, 139, 189, 578, 457, 467, 679, 569, 589,124, 145, 156, 136, 236, 246. Controllare che e senza frontiera, orientabile.
L’otre di Klein: Puo essere realizzato nello spazio di dimensione4; in quellotridimensionale ci si deve contentare di farne un modello che interseca se stesso,contro la definizione di complesso; e un fiasco il cui collo sipiega, entra all’in-terno da un lato (e questa intersezione non conta), e si saldaa un buco in fondo;
2Abbiamo aggiunto a fianco un’altra rappresentazione della stessa triangolazione, ove la ret-ta impropria compare tratteggiata perche, come nel caso del nastro di Moebius, i lati con verticiomonimi vanno identificati. [NdR]

112 Appendice A
per triangolarlo basta tagliare il toro con un taglio in123, e riincollarlo in modoche l’123 su un moncone vada a combaciare con l’132 sull’altro; ecco percio latriangolazione:128, 278, 279, 239, 139, 189, 578, 457, 467, 679, 569, 589, 134,145, 156, 126, 236, 346. Frontiera vuota, non orientabile.
A.20 Lezione 20
Prendiamo perA il corpo razionale; allora tutti gliA-moduli finiti sono spazivettoriali, e la loro dimensione funge da funzione “ord ” (lezione 16); esiste perciola caratteristica di Eulero-Poincare, ed esistono i numeri di Betti. Premesso chechiamiamosuperficie chiusal’unione di tutte le celle di un poliedro di dimensione2 senza frontiera, vale il seguente risultato fondamentale (la cui dimostrazione nondiamo, ma meta della quale, e cioe il “solo se”, e facile e puo essere fatta comeesercizio):
Teorema A.20.1.Due superficie sono omeomorfe se, e solo se, scelti dei poliedriK, K ′ che le ricoprano, essi sono intanto o ambedue orientabili o ambedue nonorientabili, e se inoltre le caratteristiche di Eulero-Poincare diK∗, K ′
∗ sul corporazionale coincidono.
Si hanno anche i seguenti fatti che diamo per informazione e senza dimostra-zione: per una superficie non orientabile, la caratteristica χ di Eulero-Poincarepuo assumere i valori1, 0,−1,−2, . . . ; per una orientabile i valori2, 0,−2,−4, . . . ;posto alloraχ = 1−p per le prime, eχ = 2−2p per le seconde, l’interop puo as-sumere i valori0, 1, 2, . . . , e si chiama ilgeneredella superficie. Inoltre, il numero2 − χ, che coincide conp + 1 per le non orientabili, o con2p per le orientabili,e l’ordine di connessionedella superficie, e coincide con il massimo interoh taleche si possano fare sulla superficieh “tagli” senza “rompere la connessione”, os-sia senza che essa divenga un insieme sconnesso. E infine, la superficie campioneorientabile di generep e la sfera conp manichi3, e cioe una sfera nella quale sisiano fatti2p buchi circolari, ogni coppia dei quali viene congiunta con un “mani-co”. Invece la superficie campione non orientabile di generep e una “sfera conpstriscie di Moebius”, ossia una sfera conp buchi circolari, i quali sono saldati allefrontiere di altrettante striscie di Moebius (notare che lafrontiera di una strisciadi Moebius e omeomorfa ad un circolo). Per esempio:
Il toro e omeomorfo a una sfera con 1 manico;L’otre di Klein e omeomorfo a una sfera con 2 striscie di Moebius;Il piano proiettivo e omeomorfo ad una sfera con 1 striscia di Moebius.
Vi e poi un altro risultato inteessante, che siamo perfettamente in grado didimostrare; consideriamo un poliedro di dimensionen, senza frontiera, che siaimmerso in uno spazio vettoriale (o affine) di dimensione> n, e le cui celle sianoproprio simplessi nel senso della lezione 18, e non loro immagini omeomorfe (per
3letterale. [NdR]

La versione del 1969/70 113
n = 2, un solito poliedro della geometria elementare se lo spazioha dimensione3; pern = 1 un poligono, piano o gobbo). Ragioniamo pern = 2 per semplicita:se prendiamo un piano che contenga una cella di dimensione2, tutte le celle di di-mensione2 di quel poliedro, appartenenti a quel piano, formano un numero finitodi poliedri; se in uno di questi cancelliamo dalla lista delle celle di dimensione1(segmenti) una tale cellaa che appartenga a2 celle di dimensione2 (adiacenti)b, c, il numero delle celle di dimensione1 diminuisce di1; se pero nel contempole due celle adiacenti le riuniamo, e chiamiamo “cella di dimensione 2” l’unioneb ∪ a ∪ c, anche il numero complessivo di celle di dimensione2 diminuisce di1.Quindi le nuove “celle” di dimensione1 non sono piu dei simplessi, ma sono aloro volta gli interni di poliedri piani; il giochetto puo continuare finche non ci siimbatta in unaa la distruzione della quale non fa diminuire di uno il numero dellecelle di dimensione2;
1
2
3 4
5
6
nel disegno le celle di dimensione2 siano le123, 134, 125, 256, 356, 345; possia-mo distruggere13, 25, 35, 12, 34, ma non56, perche cosı facendo non diminui-rebbe il numero delle nuove “celle” di dimensione2. Fatto questo sulle celle didimensione1, lo ripetiamo su quelle di dimensione0 che risultino su una stessaretta. Alla fine il nostro poliedro risulta fatto di “facce” ciascuna delle quali euna unione di celle nel senso iniziale della parola; le operazioni fatte non hannoalterato la somma a secondo membro nel (A.16.2), e ovviamente quella a primomembro e ancoraχ(M) (perA corpo razionale). Se allora il numero delle “facce”di dimensionei e indicato conFi, si ha
(A.20.2) χ =∑
i
(−1)iFi,
che e una famosa formula di Eulero.Esempi:
- Tetraedro(quattro triangoli equilateri);χ = 2, per (A.20.1) (omeomorfo allasfera);F2 = 4, F1 = 6, F0 = 4; e infatti 4− 6 + 4 = 2.
- Cubo (esaedro;6 quadrati);χ = 2; F2 = 6, F1 = 12, F0 = 8; e infatti6− 12 + 8 = 2.
- Dodecaedro(12 pentagoni regolari);χ = 2; F2 = 12, F1 = 30, F0 = 20; einfatti 12− 30 + 20 = 2.
- Ottaedro(8 triangoli equilateri);χ = 2; F2 = 8, F1 = 12, F0 = 6; e infatti8− 12 + 6 = 2.
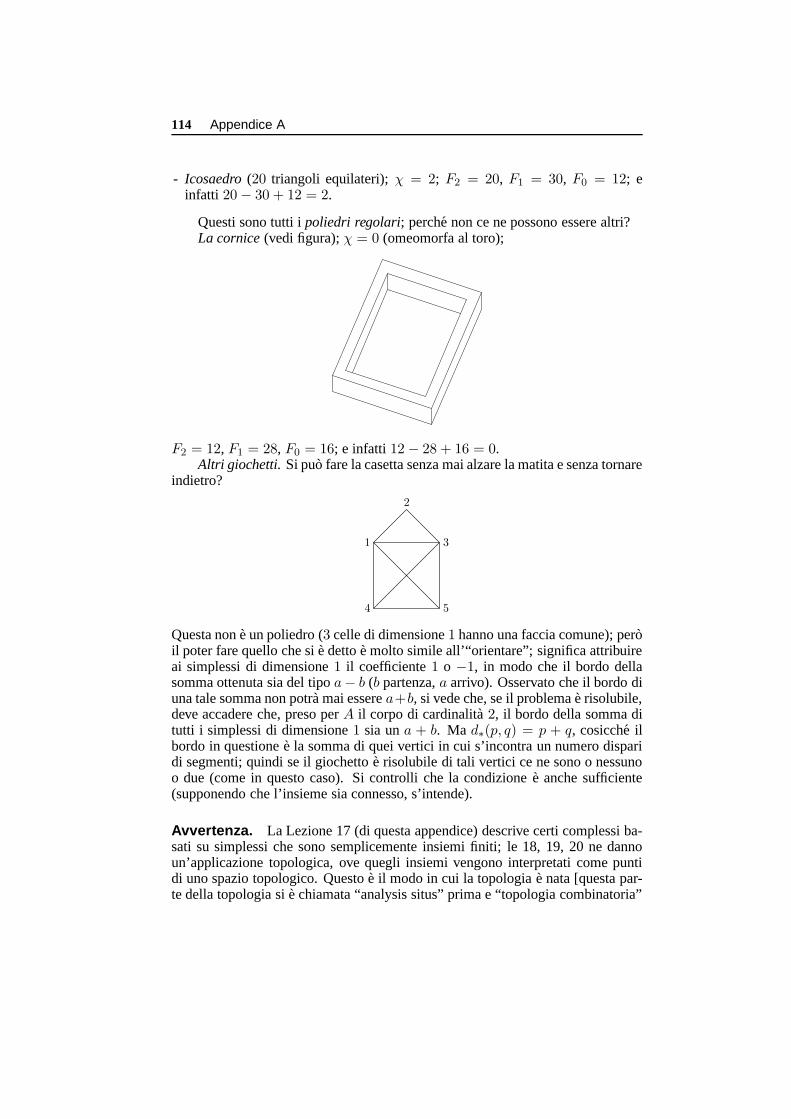
114 Appendice A
- Icosaedro(20 triangoli equilateri);χ = 2; F2 = 20, F1 = 30, F0 = 12; einfatti 20− 30 + 12 = 2.
Questi sono tutti ipoliedri regolari; perche non ce ne possono essere altri?La cornice(vedi figura);χ = 0 (omeomorfa al toro);
F2 = 12, F1 = 28, F0 = 16; e infatti 12− 28 + 16 = 0.Altri giochetti. Si puo fare la casetta senza mai alzare la matita e senza tornare
indietro?
1
2
3
4 5
Questa non e un poliedro (3 celle di dimensione1 hanno una faccia comune); peroil poter fare quello che si e detto e molto simile all’“orientare”; significa attribuireai simplessi di dimensione1 il coefficiente1 o −1, in modo che il bordo dellasomma ottenuta sia del tipoa− b (b partenza,a arrivo). Osservato che il bordo diuna tale somma non potra mai esserea+b, si vede che, se il problema e risolubile,deve accadere che, preso perA il corpo di cardinalita2, il bordo della somma ditutti i simplessi di dimensione1 sia una + b. Ma d∗(p, q) = p + q, cosicche ilbordo in questione e la somma di quei vertici in cui s’incontra un numero disparidi segmenti; quindi se il giochetto e risolubile di tali vertici ce ne sono o nessunoo due (come in questo caso). Si controlli che la condizione eanche sufficiente(supponendo che l’insieme sia connesso, s’intende).
Avvertenza. La Lezione 17 (di questa appendice) descrive certi complessi ba-sati su simplessi che sono semplicemente insiemi finiti; le 18, 19, 20 ne dannoun’applicazione topologica, ove quegli insiemi vengono interpretati come puntidi uno spazio topologico. Questo e il modo in cui la topologia e nata [questa par-te della topologia si e chiamata “analysis situs” prima e “topologia combinatoria”
La versione del 1969/70 115
poi; ora si chiama “topologia algebrica”].E pero bene avvertire che ad iniziare dal1932, per poter trattare spazi topologici completamente slegati dai numeri reali sie adottato un metodo diverso: gli insiemi finiti usati per i simplessi sono non piuinsiemi di punti, ma insiemi di aperti di uno spazio; la trattazione e meno visuale,ma piu semplice e piu generale. Non ne parliamo.
A.21 Lezione 21
Per dare un’altra applicazione dell’algebra omologica dobbiamo introdurre alcuninuovi concetti. SiaA un anello (commutativo con identita); unaderivazioneD diA e un’applicazione diA in se (e in teorie piu minuziose anche diA in qualco-s’altro), tale cheD(x + y) = Dx + Dy, D(xy) = xDy + yDx. Se ne deducesubitoD0 = 0, D(x − y) = Dx − Dy, eD1 = D(−1) = 0. L’insieme dellederivazioni diA e unA-modulo se si definiscexD mediante la(xD)y = x(Dy).Lemma A.21.1. SeA e campo d’integrita con corpo quozienteC, e seD ederivazione diA, esiste un’unica derivazione diC che induceD in A.Dim. Basta porreD(xy ) =
Dxy −xDy
y2; questa e l’unica perche0 = D1 = D(y 1
y ) =
yD( 1y ) +1yDy. C.V.D.
Un a ∈ A tale cheDa = 0 e unacostanterispetto aD; le costanti rispettoa D formano un sottoanelloA0 di A contenente il sottoanello fondamentale, eformano un sottocorpo seA e corpo; laD e A0-lineare, ossiaD(ax) = aDxpera ∈ A0. Certe volte conviene parlare solo delleD il cui anello delle costanticontiene un dato anelloB, ossia delleD che inducono inB la derivazione0 (obanale); esse saranno chiamate le derivazionidi A suB.Lemma A.21.2.SiaA un campo d’integrita, e sianox1, . . . , xn indeterminate suA; allora esistono, e sono uniche, le derivazioniD1, . . . ,Dn di A[x] suA tali cheDixj = δij ; esse formano un insieme di generatori liberi dell’A-modulo dellederivazioni diA[x] suA.Dim. LeDi esistono perche
Di
(∑
r
arxr11 · · · xrii · · · xrnn
)=∑
r
riarxr11 · · · xri−1
i · · · xrnn ;
questa da anche l’unicita. Se poiD e qualsiasi, si haD =∑
i(Dxi)Di; le Di
sono generatori liberi perche da∑
i yiDi = 0 si ottiene, applicando adxj , cheyj = 0. C.V.D.
Le Di del (A.21.2) si denotano spesso con∂∂xi, notazione che ha senso solo
quando sia ben chiaro chi siaA e chi siano lex1, . . . , xn; si usa scrivere∂y∂xiin
luogo di(
∂∂xi
)y; si dicederivare rispettoadxi in luogo di “applicareDi”.
Un polinomio in una indeterminata, a coefficienti in un corpo, e separabilese non ha radici di molteplicita> 1 (in una chiusura algebrica del corpo).

116 Appendice A
Lemma A.21.3.Sia C un corpo,x una indeterminata suC, ed f = f(x) unpolinomio inC[x]. Allora f e separabile se, e solo se,f(x) e ∂f
∂x sono primi fraloro. Inoltre: seC ha caratteristica0, ogni f irriducibile e separabile; seC hacaratteristicap 6= 0, un talef e separabile se, e solo se,f(x) /∈ C[xp].
Dim. La D = ∂∂x puo ovviamente essere estesa ad una derivazione diK[x] su
K, conK chiusura algebrica diC. Se alloraf(x) = a∏
i(x − ki), conki ∈ K,si haDf =
∑j a∏
i 6=j(x − ki); i fattori irriducibili di f (in K[x]) sono glix − ki; uno di questi, per esempiox − k1, compare certamente in tutti i terminidi∑
j con j > 1; compare anche nel primo termine se, e solo se,k1 = kjper qualchej 6= 1, ossia se e solo sef non e separabile; cio dimostra la primaparte. Per la seconda si scrivaf = anx
n + an−1xn−1 + · · · + a0, ondeDf =
nanxn−1 + (n − 1)an−2x
n−1 + · · · + a1, e si applichi la prima parte. L’f e giairriducibile, onde e primo con tutti i polinomi eccetto lo0; quindif e inseparabilese, e solo se,Df = 0; ne segue l’asserto. C.V.D.
A.22 Lezione 22
Lemma A.22.1.SiaC un corpo,D una derivazione diC, eK = C[θ] un prolun-gamento finito semplice separabile diC (ossia tale che il polinomio minimo diθsuC sia separabile). Allora esiste una derivazione∆ di K che inducaD in C.Dim. Siaf(x) il polinomio minimo diθ suC, ondef(θ) = 0; pongasig(x) =( ∂∂x)f(x), con la ∂
∂x computata come derivazione inK[x] suK; se la∆ esiste, sideve avere∆f(θ) = 0; ma sef(x) =
∑ni=0 cix
i, e
∆f(θ) =n∑
i=0
(Dci)θi + g(θ)∆θ.
Ora, g(x) e un polinomio di grado< n, e non e nullo perchef e separabile;perciog(θ) 6= 0, e∆θ = −∑i(Dci)θ
i/g(θ); quindi∆, se esiste, e unica. Per farvedere che esiste basta prendere per∆θ l’espressione trovata, col che il∆y perogni y ∈ K e determinato per linearita, e basta far vedere che la∆ cosı definita eproprio una derivazione. Lo lasciamo come esercizio.4 C.V.D.
Dai (A.21.2), (A.21.3), (A.22.1), segue:Teorema A.22.2.Sia K un prolungamento del corpoC, di trascendenza fini-ta n suC, e si supponga cheK possieda suC una base separantex1, . . . , xn;cio significa che lex1, . . . , xn sono algebricamente indipendenti suC, cheK ealgebrico suC(x1, . . . , xn), e che ogni elemento diK ha su questo corpo un po-linomio minimo separabile (sempre vero se, per esempio,C ha caratteristica0).Allora le derivazioni diK suC formano uno spazio vettoriale suC di dimensionen.
Ci poniamo ora nelle condizioni del (A.22.2); lo spazio vettoriale delle deri-vazioni sara indicato conderK/C; il suo duale sara indicato conΩ1
K/C , e i suoi

La versione del 1969/70 117
elementi si chiamano idifferenziali diK suC, di dimensione1, o semplici. LospazioEr suΩ1
K/C , che e quindi lo spazio delle applicazionir-lineari alternantidi der × · · · × der (r volte) suC, e indicato conΩr
K/C , e i suoi elementi sono i
differenziali (diK suC) di dimensioner, o r-upli; si pone ancheΩ0K/C = K. Il
3.42 di [AA] dice dunque cheΩrK/C ha dimensione
(nr
), e che gliΩr conr > n
sono= 0; poniamo= 0 anche gliΩr con r < 0. SeΩK/C =⊕
r ΩrK/C ,
trasformeremo questo spazio vettoriale graduato (suK) in un complesso (lezio-ne 14 di questa appendice) diC-moduli (ossia di spazi vettoriali suC, di solitodi dimensione infinita), e non, si noti bene, diK-moduli. Per fare questo vi defi-niremo und = dK/C di grado1; la definizione e la seguente, oveωr ∈ Ωr
K/C , equindiωr(D1, . . . ,Dr) ∈ K:
(dωr)(D0, . . . ,Dr) =r∑
i=0
(−1)iDiωr(D0, . . . , Di, . . . ,Dr)+
+∑
i<j
(−1)i+jωr([Di,Dj ],D0, . . . , Di, . . . , Dj , . . . ,Dr).(A.22.3)
Qui occorre spiegare che[Di,Dj ] significaDiDj −DjDi, ossia che perx ∈ Ksi ha [Di,Dj ]x = Di(Djx) − Dj(Dix); si controlla subito che[Di,Dj ] e unaderivazione diK suC.
A.23 Lezione 23
Occorre far vedere intanto che ildωr definito da (A.22.3) e veramente multilinearealternante. Ora, ser = 0, ondeωr = x ∈ K, la (A.22.3) dice che
(A.23.1) (dx)D = Dx,
e questa applicazione,D 7→ Dx e effettivamente lineare; per ognir, inoltre,ciascun termine del II membro di (A.22.3) eK-lineare in ciascunaDh, onde talee dωr. Per l’alternanza, se per esempioD0 = D1, nella
∑i se ne vanno tutti i
termini contenenti siaD0 cheD1 in parentesi, e resta solo
D0ωr(D1,D2, . . . )−D1ωr(D0,D2, . . . ) = 0;
invece nella∑
i<j (che esiste solo ser > 1) se ne vanno di nuovo i terminicontenenti siaD0 cheD1 (ossia doveD0 eD1 non hanno il cappuccio), e resta
−ωr([D0,D1],D2, . . . ) +∑
j>1
(−1)jωr([D0,Dj ],D1, . . . , Dj , . . . ,Dr)
+∑
j>1
(−1)j+1ωr([D1,Dj ],D0,D2, . . . , Dj , . . . ,Dr) = 0.

118 Appendice A
Quindi dωr e alternante, onde∈ Ωr+1K/C . Poi, l’applicazioneω 7→ dω e C-
lineare, come si vede subito dal (A.22.3); vediamo come si comporta rispettoalla moltiplicazione per unx ∈ K; il (A.22.3) dice subito che
(A.23.2) d(xωr) = d(x ∧ ωr) = dx ∧ ωr + x ∧ dωr
(cfr. 3.40 e 3.41 di [AA]).Questo ci fa ricordare cheΩK/C e anche un’algebra, e ci suggerisce di ricer-
care la relazione trad e∧. Se allorax1, . . . , xn e una base separante diK suC(cfr. A.22.2), pongasiLi =
∂∂xi
; le dx1, . . . , dxn appartengono aΩ1K/C , e sono
linearmente indipendenti suK, perche se∑
i yidxi = 0, e0 = (∑
i yidxi)Lj =yj; quindi ledxi sono una base diΩ1
K/C suK. Prima di proseguire notiamo perinciso una conseguenza immediata del primo fatto, che e poiuna formula ben notain Analisi:A.23.3.sey ∈ K, edy =
∑i
∂y∂xi
dxi
(basta applicare ambo i membri adLi). Continuiamo; intanto pery ∈ K la(A.22.3) comporta che
(ddy)(D0,D1) = D0D1y −D1D0y − [D0,D1]y = 0,
ossiaddy = 0; dico allora che:
(A.23.4) d(ωr ∧ ωs) = (dωr) ∧ ωs + (−1)rωr ∧ (dωs)
seωi ∈ ΩiK/C , per r = 0 o s = 0 questa e la (A.23.2); poi seωr, ωs sono
elementi della base descritta, ossia prodotti esterni di vari dxi, questa si riduce a0 = 0 (basta osservare che per un taleωr, se nella (A.22.3) si prendono delleLj inluogo delleDh, tutto nel secondo membro va a0, dato che leLj commutano fraloro); attesa allora laC-linearita di ambo i membri, basta dimostrare la (A.23.4)quandoωr, ωs sono multipli, a coefficienti inK, di elementi della base descritta:ωr = yω′
r, ωs = zω′s. Il primo membro diviened(yzω′
r ∧ ω′s) = d(yz) ∧ ω′
r ∧ ω′s
per (A.23.2); il secondo diviene
zdy ∧ ω′r ∧ ω′
s + (−1)ryω′r ∧ dz ∧ ω′
s = zdy ∧ ω′r ∧ ω′
s + ydz ∧ ω′r ∧ ω′
s
per 3.41 di [AA]; ma queste coincidono, come richiesto.E ora finalmente possiamo vedere chedd = 0, ossia cheddωr = 0 per ogni
ωr; infatti dd(yω′r) = d(dy ∧ ω′
r) = 0 per (A.23.4), percheddy = dω′r = 0.
QuindiΩK/C e un complesso nel quale vale la (A.23.4).
A.24 Lezione 24
Ora che abbiamo il complessoΩK/C possiamo considerare i cocicliZr e i cobordiBr; gli ωr ∈ Zr sono quelli per cuidωr = 0, e si chiamano differenzialichiusi;

La versione del 1969/70 119
gli ωr ∈ Br sono quelli per cui esiste unωr−1 tale cheωr = dωr−1, e si chiamanodifferenziali esatti. Se si prendono due elementi diΩn
K/C , essi saranno del tipoσ1 ∧ · · · ∧ σn eσ′
1 ∧ · · · ∧ σ′n; si sa inoltre che il secondo e multiplo del primo se
questo e non nullo; il coefficienteJ ∈ K tale cheσ′1 ∧ · · · ∧ σ′
n = Jσ1 ∧ · · · ∧ σnsi chiama l’jacobianodi σ′
1 ∧ · · · ∧σ′n rispetto aσ1 ∧ · · · ∧σn, e si indica con una
delle notazioni
σ′1 ∧ · · · ∧ σ′
n
σ1 ∧ · · · ∧ σn, J
(σ′1, . . . , σ
′n
σ1, . . . , σn
).
Seσi = dxi eσ′i = dx′i si scrive anche
d(x′1, . . . , x′n)
d(x1, . . . , xn), J
(x′1, . . . , x
′n
x1, . . . , xn
).
L’applicazioneK-linearef di ΩnK/C tale cheσ′
i = fσi e data, nel secondo caso,
dadx′i = fdxi, ossia dafdxi =∑
j∂x′
i
∂xjdxj ; quindi J
(x′
x
)= det f = det(
∂x′
i
∂xj),
che e la solita definizione dell’jacobiano in Analisi; si vede anche cheJ 6= 0 se,e solo se, ledx′i sono linearmente indipendenti suK, ossia se, e solo se, lex′isono una base separante (“variabili indipendenti” dell’Analisi). Sen = 1 si ha inparticolare∂x′
∂x = J(x′
x
)= dx′
dx , noto simbolo per le derivate “totali”; si noti chequesto e un vero rapporto di differenziali.
Che cosa ci se ne fa di tutta questa costruzione? Finche si vuole usare tuttoil ΩK/C , poco, in quanto esso e canonicamente legato aK eC, e quindi non puocontenere informazioni nuove. L’utilita sta quando o si usano dei sottocomplessidi ΩK/C che siano anche sottoalgebre e che siano spazi vettoriali suC di dimen-sione finita, ovvero quando tutta la teoria sia fatta non partendo da un corpoC,ma da un anello; o infine quandoK e di sua natura ignoto, e si usa tutto il mac-chinario esposto per studiarlo. Cio che in ogni caso e estremamente interessantee il fatto che le due applicazioni dell’algebra omologica qui esposte (topologiae differenziali) sono intimamente legate tra loro, come orafaremo vedere, senzapero dare dimostrazioni.
Diamo solo degli esempi per illustrare l’affermazione precedente.
A.25 Lezione 25
Si prenda perC il corpo reale (anche il complesso andrebbe bene); ci interessaun poliedroK di dimensionen, e conK∗ si indichera il complesso sul corporeale; chiamiamoF la C-algebra delle “funzioni differenziabili suK”; funzionisuK vuoldire applicazioni diK (unione delle celle diK) su C; dato poi l’o-meomorfismo usato per definire le celle, esse saranno funzioni reali di n variabilireali, e come tali ha senso parlare di differenziabilita. PorremoF i = Ωi
F/C , e
F ∗ =⊕
i Fi; indicheremo cond sia il d∗ di K∗ che il d∗ di F ∗. Si puo definire
120 Appendice A
un’applicazioneC-bilineare(S, ω) 7→ S ω ∈ C di Ki × F i suC nel modoseguente, per approssimazioni successive; intanto basta definirla quandoS, ω so-no simplessi, ossia basta definire laS (dx1 ∧ · · · ∧ dxi); ora, S e una cella,ossia l’immagine omeomorfa di un simplesso in uno spazio vettoriale V suC,di dimensionem ≥ n; i suoi vertici sono le immagini di certi vettoriv0, . . . , vi;le x1, . . . , xi sono i coefficienti con cui certi vettoriw1, . . . , wi (che generanolo stesso spazio generato daivj − v0) compaiono nell’espressione di un puntodella cellaS; usando la base dualew∗
1, . . . , w∗i prenderemo allora, come prima
approssimazione diS ω, la
(i!)−1(w∗1 ∧ · · · ∧w∗
i )(v1 − v0, . . . , vi − v0).
La seconda approssimazione consiste nel suddividereS in tante celleS′1, S
′2, . . .
di dimensionei, nel computare gliS′j ω nel modo detto, e nel farne la somma. Si
puo dimostrare che se le suddivisioni sono fatte con giudizio, queste approssima-zioni tendono ad un limite, che e appunto l’S ω; esso e comunemente denotatocon
∫S ω, e chiamato l’integrale di ω su S. Se i = 0,
∫S ω e semplicemente
la somma dei valori cheω (elemento diK) assume nei punti diS (che sono unnumero finito).
Nei casi piu simpatici (qui naturalmente non diamo dettagli) l’applicazione
(Si, ωi) 7→∫
Si
ωi
(ora gli indici danno la dimensione) e una dualita; ma il piu bello e che in essa led di K∗ edF ∗ sono trasposte l’una dell’altra:
(A.25.1)∫
dSi
ωi−1 =
∫
Si
dωi−1 (formula di Green-Stokes).
QuindiH∗ (coomologia diF ∗) e il duale diH∗ (omologia suK∗), e le proprietadi K possono essere trovate studiandoH∗.
Esempi. 1. K e il segmento aperto(a, b), e le sue facce sonoa e b; F e fattodi funzioni differenziabili in(a, b). La (A.25.1) scritta con un simbolismo piucomune in questo caso, dice semplicemente che
∫ ba df(x) = f(b)− f(a).
2. Prendiamo perK la regione fra due circonferenze concentriche, triangolatacome si vuole; se si prende perS un cerchio tutto contenuto inK (tutto il suointerno), ondedS e la circonferenza, la (A.25.1) dice che
∫
dSfdx+ gdy =
∫
S
(∂g
∂x− ∂f
∂y
)dx ∧ dy
(usualmente indicato con∫∫
S(. . . )dx dy). Ma questo puo non esser vero se ilcerchioS non e tutto inK (per esempio, se e concentrico colle due circonferen-ze che delimitanoK); per esempio,ω = ydx−xdy
x2+y2, che e chiuso ma non esatto,

La versione del 1969/70 121
ha integrale nullo lungo le curve chiuse il cui interno e tutto in K, ma non lun-go quelle senza questa proprieta; il suo “integrale” fattocon la testa nel sacco e− arctan(y/x), chenoneun elemento diF .
3. Esercizio. Chi conosce gli operatori vettorialigrad, rot puo cercare il lorosignificato nel contesto di questa teoria.
122
Elenco dei simboli
N numeri naturali,0 inclusoZ numeri interiQ,Q>0 numeri razionali, risp. numeri razionali positiviR,R>0 numeri reali, risp. numeri reali positiviC numeri complessiQ∗,R∗,C∗ elementi invertibili inQ, risp.R,C
V ∗ spazio duale diV 1V ∗∗ spazio biduale diV 1X⊥ sottospazio ortogonale inV ∗ 1f∗ applicazione lineare trasposta 2A∗ matrice trasposta 2Pn gruppo simmetrico di ordinen! 3sgnp segnatura della permutazionep 3Ei(V ) spazio delle formei-lineari alternanti suV ∗ 3f ∧ g prodotto esterno di applicazioni multilineari alternanti4E(V ) algebra esterna suV 6vt1 ∧ · · · ∧ vti vettori della base diEi(V ) associata ad una base diV 6Ei(f) omomorfismo associato adf : V → U 6g ⊞ h somma ortogonale di due forme bilineari 11V ⊞ U somma ortogonale di due spazi 11g ⊟ h differenza ortogonale di due forme bilineari 11V ⊟ U differenza ortogonale di due spazi 11〈S〉 minimo sottospazio che contieneS 14WC gruppo di Witt del corpoC 21v∧w prodotto vettoriale 26(T, S) spazio affine 29(O, t1, . . . , tn) riferimento affine 30An spazio affine di dimensionen 35(Sn, σ) spazio proiettivo di dimensionen 36[V ] insieme dei sottospazi vettoriali diV 36sostS sostegno di uno spazio vettoriale inSn 36Ar < Bs relazione di appartenenza (nello spazio proiettivo) 36Ar ∩Bs intersezione fra elementi dello spazio proiettivo 36Ar +Bs elemento generato daAr eBs nello spazio proiettivo 36(Sn, σ
∗) spazio proiettivo duale di(Sn, σ) 37(fS, fV ) applicazione proiettiva 38
124 Appendice A
OmZ spazio vettoriale delle omologie speciali di asseZ 42(P0, . . . , Pn, U) sistema di riferimento inSn 44(P∞,P0,P1,P ) birapporto di quattro punti allineati 46(a, b, c,d) birapporto di quattro elementi diC ∪ ∞ 46V (c1, . . . , cr) determinante di Vandermonde 65xi(P ) valore assunto inP dalla coordinataxi 69D =
∑i eiUi divisore (suSn) 75
divSnf(x) divisore di una funzione razionale 75suppD supporto di un divisore 75Sn estensione diSn (def. suC) a C 75Zi(M) cicli di dimensionei 103Bi(M) bordi di dimensionei 103Hi(M) i-esimo gruppo di omologia del complessoM 103derK/C spazio vettoriale delle derivazioni diK suC 116Ω1K/C differenziali diK suC 116
Indice analitico
C-algebra graduata, 2n+ 1-edro, 44
elementi omogenei di gradog, 2spazio proiettivo duale, 37
affinita, 30centrali, 33traslazioni, 33
algebra esterna, 6annullatore di unA-modulo, 60applicazionep-semilineare tra spazi vet-
toriali, 27applicazione affine, 30applicazione alternante, 3applicazione bilineare, 1applicazione lineare trasposta, 2applicazione proiettiva, 38
immersione, 38iniettiva, 38soprastante, 38trasposta, 39
applicazione razionale lineare, 72applicazione sesquilineare, 27asintoti, 90asse
del paraboloide, 96di una quadrica a centro, 96
asse di prospettivita, 83assoluto
(quadrica inviluppo), 91(quadrica luogo), 91
autoreciprocita, 39autovalori, 64autovettori, 64
base duale, 1
base ortonormale, 17base separante, 116base topologica, 28basi ordinate equiorientate, 24biduale, 1birapporto di quattro punti allineati, 45birapporto quattro elementi diC∪∞,
46bordi (in un complesso), 103
caratteristica di Eulero-Poincare di uncomplesso, 106
catene, 103cella di dimensionei, 109celle, 103centro di prospettiva, 50centro di una quadrica affine, 89cerchio, circolo, 95cicli (in un complesso), 103ciclo
componenti, 86effettivo (positivo), 86molteplicita di una componente, 86ordine del ciclo, 86supporto, 86
ciclo (di dim. 0 inSn, 86classificazione affine delle quadriche, 89classificazione proiettiva (delle quadri-
che), 87coefficiente angolare, 98collineazione, 39complesso (diA-moduli), 103complesso simpliciale, 107componente (irriducibile), 74congruenze, 33
dirette e inverse, 33coni isotropi, 95
125
126 INDICE ANALITICO
conica inS2, 77cono, 70
quadrico, 78cono asintotico, 90coordiante omogenee, 44coordinate pluckeriane di un iperpiano,
44coordinate proiettive, 44costante, 115curve e superficie come particolari iper-
superficie, 73
derivazionebanale, 115di A suB, 115su un anello, 115
determinante di un endomorfismo, 7determinante di Vandermonde, 65diametri
(di una quadrica a centro), 90coniugati, 90
differenza ortogonale di due forme bili-neari, 11
differenziali, 117chiusi, 118esatti, 119
divisorecomponenti, 75effettivo, 75molteplicita delle componenti, 75primo, 75razionale suC, 76supporto, 75
divisore suSn, 75divisori elementari di una matrice, 59dualita, 1dualita hermitiana, 27dualita sesquilineare, 27
elementi di torsione di unA-modulo, 60ellisse
con punti razionali, 90senza punti razionali, 90
ellissoide, 90con punti razionali, 90senza punti razionali, 90
endomorfismo degenere, 7endomorfismo singolare, 7equazione di un iperpiano, 31equazioni di una varieta algebrica, 69equivalenza elementare, 61equivalenza fra matrici suA, 57
facce di un simplesso, 109fascio
di coniche iperosculatrici, 86di coniche osculatrici, 85di coniche tangenti, 85
fascio (pencil) di quadriche, 84fattori invarianti di una matrice, 58forma bilineare, 10forma bilineare degenere, 10forma canonica di Jordan, 62forma canonica di una matrice, 55forma canonica razionale, 63forma quadratica, 11forma quadratica definita negativa, 23forma quadratica definita positiva, 23forma quadratica indefinita, 23forma quadratica semidefinita negativa,
23forma quadratica semidefinita positiva,
23forme, 2formula di Green-Stokes, 120freccia, 102funzioni a quadrato sommabile, 28funzioni nulle quasi ovunque, 29fuochi, 96
generatori liberi di un modulo, 55genere (di una superficie), 112gruppo alternante, 3gruppo armonico, quaterna armonica, 46gruppo delle traslazioni dello spazio af-
fine, 29gruppo di Witt di un corpo, 21gruppo simmetrico, 3
immagine di un complesso, 104indice d’inerzia, 22insieme orientato, 106
INDICE ANALITICO 127
intersezione (come ciclo), 86intersezione di un divisore diSn con un
sottospazio proiettivo, 76inversione, 3involuzione, 81involuzione degli angoli retti, 92involuzione dei diametri coniugati, 90iperbole, 90iperboloide, 90
ellittico, 90iperbolico, 90
iperpiani diametrali (di una quadrica acentro), 90
iperpiano affine, 30iperpiano all’infinito, 42iperpiano improprio, 42iperpiano tangente a un divisore in un
punto semplice, 80ipersuperficie, 73isometria, 11
jacobiano, 119
matrice compagna di un polinomio, 62matrice ipercompagna, 63matrice ortogonale, 18matrice simplettica, 18matrice trasposta, 2matrici congruenti, 12matrici modulari, 14matrici ortogonalmente simili, 66metrica ellittica
ampiezza, 99metrica ellittica (sulla retta), 99metrica iperbolica(sulla retta), 98metrica parabolica (sulla retta), 99metrica su uno spazio affine, 31metriche non euclidee del piano, 99metriche non euclidee sulla retta, 99minore principale di una matrice, 23modulo
ciclico, 56finitamente generato, 56finito, 56generatori liberi, 55graduato, 103
liberamente generato, 55libero, 55semplice, 56unitario, 55
modulo (sinistro) su un anello, 55modulo finito a torsione su un PID, 60
norma ellittica, 14norma iperbolica, 14norma su uno spazio vettorialeV , 11nucleo di una forma bilineare, 10numeri di Betti (di un complesso), 106
omologia, 41asse, 42centro, 42speciale, 42
omomorfismo (di grador) di comples-si, 104
omomorfismo diC-algebre, 2operatore di bordo, 103operazioni elementari
sulle colonne, 57sulle righe, 57
ordine di connessione, 112ordine di un divisore, 76ordine di un modulo libero, 56orientamenti, 24orientamenti (di un insieme finito), 106ortogonale nello spazio duale, 1ortogonali, 1ortonormale,r-upla17
parabola, 91paraboloide
ellittico, 91iperbolico, 91
paraboloidi, 89parametri di un paraboloide, 94pfaffiano, 17piano proiettivo, 36piano punteggiato, 36piano rigato, 37polare di un punto, 79polarita, 40
128 INDICE ANALITICO
legata ad una quadrica non degene-re, 79
polarita assoluta, 91polarita indotta (su un sottospazio o una
stella), 82poliedri regolari, 114poliedro, 110
fortemente connesso, 110frontiera, 110orientabile, 110
polinomio caratteristico (funzione carat-teristica)
di un endomorfismo, 64polinomio minimo (funzione minima) di
un endomorfismo, 61polinomio separabile, 115polo di un iperpiano, 79prodotto esterno, 4proiettivita, 39proiezione di centro un elemento diSn,
39proiezione di un elemento diSn, 39proiezione seguita da sezione, 49prospettivita, 50punti allineati, 50punti ciclici, 91punti dello spazio affine, 29punto esterno ad una conica, 99punto interno ad una conica, 99punto iperbolico (su una quadrica), 88punto proiettivo, 36punto punteggiato, 36punto semplice (su un divisore), 79punto singolare (su un divisore), 79
quadrangolo piano completo, 47punti diagonali, 47vertici e lati, 47
quadrati dei semiassi, 94quadrato del volume, 25quadrica
luogo ed invuluppo, 79quadrica inSn, 77quadriche a centro, 89quadriche degeneri, 78
spezzate, 78
quadriche duali, 79quadrilatero piano completo
lati diagonali, 47lati e vertici, 47
quadrilatero piano completo, 47quarto armonico, 46
radici caratteristiche (autovalori), 64reciprocita, 39reciprocita diC-algebre, 2Regola di Laplace generalizzata, 9retta e piano affine, 29retta esterna ad una conica, 99retta interna ad una conica, 99retta proiettiva, 36retta punteggiata, 36rette isotrope, 91riferimento affine, 30
assi coordinati, 31coordinate affini, 30iperpiani coordinati, 31origine, 30punto unita, 30
riferimento proiettivo, 44(n+ 1)-edro fondamentale, 44punto unita, 44
rotazioni, 33
schiere di rette su una quadrica, 88segnatura, 3semiasse, 94
reale, 94trasverso, 94
serie di Fourier, 29sezione nello spazio proiettivo, 40sfera, 95
centro, 95quadrato del raggio, 95
simplessi (di un complesso simplicia-le), 107
simplesso orientato (nello spazio affi-ne), 109
sistemi nulli, 40somma ortogonale di due forme bilinea-
ri, 11sottocomplesso, 104
INDICE ANALITICO 129
sottospazi affini incidenti, 30sottospazi affini paralleli, 30sottospazi affini sghembi, 30sottospazi isotropi (diAn), 91sottospazi ortogonali, 32sottospazio affine, 30sottospazio isotropo, 10sottospazio proiettivo, 38sottospazio proiettivo tangente a un di-
visore, 79sottovarieta, 73Spazi vettoriali duali, 1spazio affine, 29
direzione, 35metrico, 31orientato, 32
spazio alternante, 14spazio di Hilbert, 28spazio di piani, 37spazio ellittico, 14spazio euclideo, 32spazio iperbolico, 14spazio normato, 11spazio proiettivo, 36
elementi complementari, 36elementi di dimensionem, 36elementi incidenti, 36elementi sghembi, 36elemento generato, 36intersezione, 36iperpiani, 36piani, 36punteggiato, 36punti, 36relazione di appartenenza, 36rette, 36sostegno, 36sottospazio, 37sottospazio vuoto, 36spazio di iperpiani, 37
spazio vettoriale orientato, 24stella di centroAr in Sn, 37successione esatta, 102superficie chiusa, 112supporto
di un divisore, 75
teorema di Pitagora, 26trasformazioni ortogonali, 14trasformazioni simplettiche, 14trasposizione semilineare, 27trasposto, 1triangolazione, 109
di dimensione pura, 110poliedrale, 110
triangoliomologici, 54prospettivi, 54
triangolo, 54
varietacomponente irriducibile, 74irriducibile, 73
varieta algebrica, 69varieta di Segre, prodotto alla Segre, 72varieta inSn definite suC, 75varieta lineari inSn, 70versore, 17vertice
del paraboloide, 96vertice di un cono, 70vettore isotropo, 10vettore normalizzato, 17vettori caratteristici (autovettori), 64vettori ortogonali per un’applicazione bi-
lineare, 10volume di unan-upla ordinata, 25vuoto proiettivo, 36vuoto punteggiato, 36
zero e polo dif ∈ C(x), 75