ieee robot - university of tennessee at martin · ieee robot 2007 team members : dae ... ir...
TRANSCRIPT
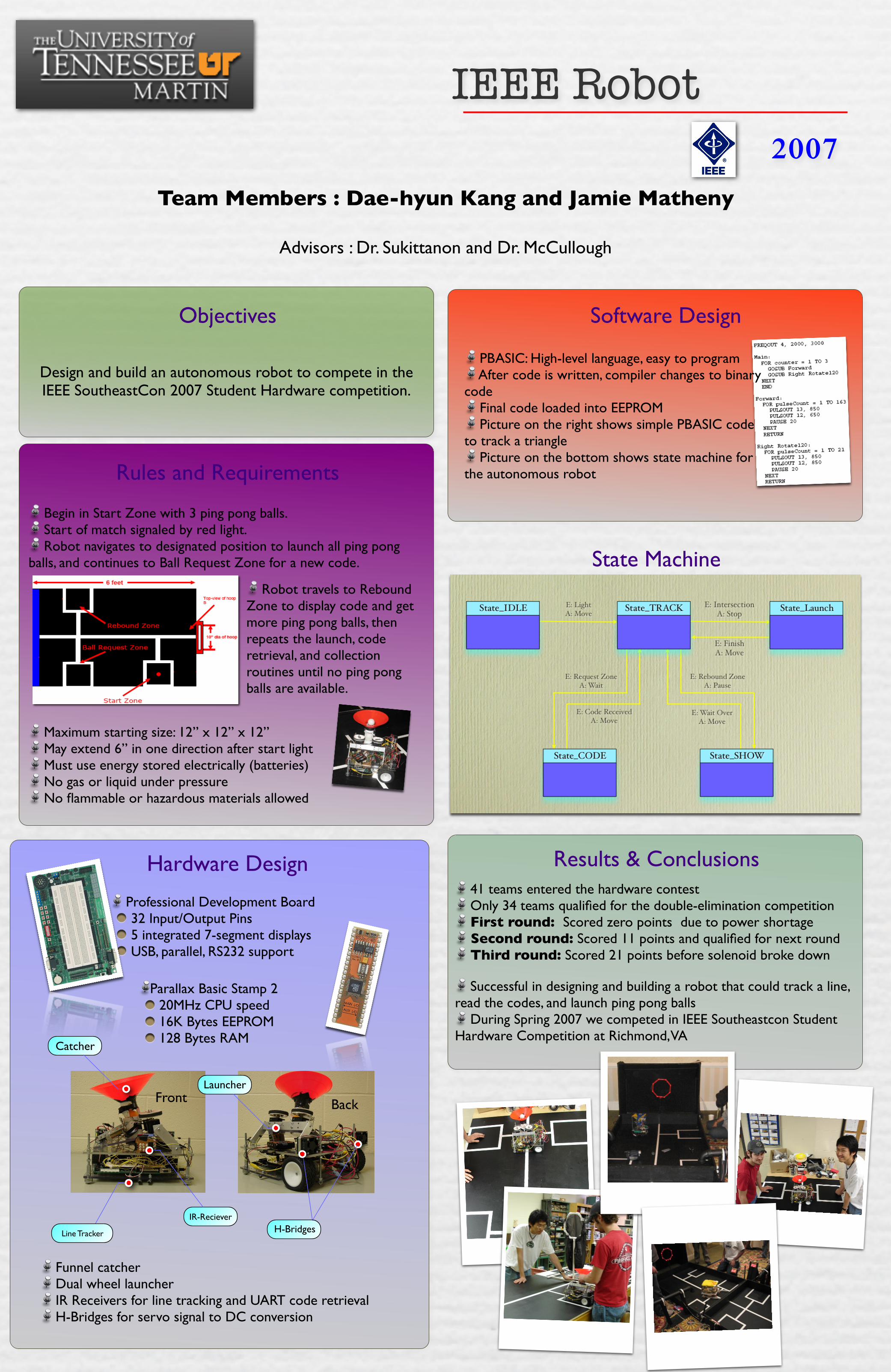
IEEE Robot2007
Team Members : Dae-hyun Kang and Jamie Matheny
Advisors : Dr. Sukittanon and Dr. McCullough
Objectives
Design and build an autonomous robot to compete in the IEEE SoutheastCon 2007 Student Hardware competition.
Rules and Requirements
Begin in Start Zone with 3 ping pong balls. Start of match signaled by red light. Robot navigates to designated position to launch all ping pong
balls, and continues to Ball Request Zone for a new code.
Robot travels to Rebound Zone to display code and get more ping pong balls, then repeats the launch, code retrieval, and collection routines until no ping pong balls are available.
Maximum starting size: 12” x 12” x 12” May extend 6” in one direction after start light Must use energy stored electrically (batteries) No gas or liquid under pressure No flammable or hazardous materials allowed
Professional Development Board 32 Input/Output Pins 5 integrated 7-segment displays USB, parallel, RS232 support
Funnel catcher Dual wheel launcher IR Receivers for line tracking and UART code retrieval H-Bridges for servo signal to DC conversion
Hardware Design
Parallax Basic Stamp 2 20MHz CPU speed 16K Bytes EEPROM 128 Bytes RAM
Front Back
Software Design
PBASIC: High-level language, easy to program After code is written, compiler changes to binary
code Final code loaded into EEPROM Picture on the right shows simple PBASIC code
to track a triangle Picture on the bottom shows state machine for
the autonomous robot
State Machine
41 teams entered the hardware contest Only 34 teams qualified for the double-elimination competition First round: Scored zero points due to power shortage Second round: Scored 11 points and qualified for next round Third round: Scored 21 points before solenoid broke down
Results & Conclusions
Successful in designing and building a robot that could track a line, read the codes, and launch ping pong balls
During Spring 2007 we competed in IEEE Southeastcon Student Hardware Competition at Richmond, VA
Catcher
Launcher
H-BridgesIR-Reciever
Line Tracker