in copyright - non-commercial use permitted rights / …31941/... · boutros zurich, december 1963....
TRANSCRIPT
Research Collection
Doctoral Thesis
Numerical methods for the inversion of Laplace transforms
Author(s): Boutros, Youssef Zaki
Publication Date: 1964
Permanent Link: https://doi.org/10.3929/ethz-a-000087892
Rights / License: In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For moreinformation please consult the Terms of use.
ETH Library

Prom. Nr. 3491
NUMERICAL METHODS FOR THE INVERSION
OF LAPLACE TRANSFORMS
Thesis presented to
THE SWISS FEDERAL INSTITUTE OF TECHNOLOGY, ZURICH
for the degree of
DOCTOR OF MATHEMATICS
by
YOUSSEF ZAKI BOUTROS
B. Sc. Elec. Eng. University of Alexandria
Dipl. Math. ETH Zurich
Citizen of the United Arab Republic
Accepted on the recommendation of
Prof. Dr. E. Stiefel
Prof. Dr. P. Profos
1964
ASCHMANN & SCHELLER AG, ZURICH
Leer - Vide - Empty

Preface
The present work deals with some practical methods for the numerical in¬
version of Laplace transforms covering those which are frequently met with
in stable networks and regulation problems.
I take this opportunity to acknowledge my indebtedness and gratitude to
Prof. Dr. E. Stiefel for his generous support during the investigations for this
thesis. I wish also to express my sincere thanks to Dipl. Ing. A. Schai for the
suggestion of the practical problem of Chapter IV.
I am very grateful to Prof. Dr. P. Profos for accepting this thesis.
YoussefZ. Boutros
Zurich, December 1963.
3
Leer - Vide - Empty

Index
Page
Chapter I: Introduction 7
Chapter II: Inversion of Laplace Transforms using Laguerre Functions 8-25
1. Development of the method 8
2. Procedure for the practical application 12
3. Remarks 13
4. Numerical examples 21
5. Conclusion 25
Chapter III: Laplace Transforms with known Position of the Dominant Pole 25-35
1. Simple real pole 25
2. Conjugate complex pair of poles 28
3. Remarks 35
Chapter IV: Position Control System with Load Disturbance 35-52
1. Determination of C/R 37
2. Determination of C/TL 40
3. Output c (t) corresponding to different inputs on both sides 42
Chapter V: Linear Flow of Heat 52-60
1. Development of the method 52
2. Numerical examples 58
Appendix 61
References 63
Zusammenfassung 64
Curriculum vitae 64
5

Leer - Vide - Empty

CHAPTER I
Introduction
The present work deals with the problem of determining the inverse function
of a given Laplace transform, which is assumed to be analytic in the entire
right half plane including the imaginary axis. This method of determining the
inverse function requires only the numerical values of the transform at these
points which are distributed on the imaginary axis in a given way, or even on
an axis parallel to it and lying entirely in the domain of regularity of the giventransform. In case of an empirically given function, it is more convenient to
calculate the values of the transform directly at these given points (otherwise
by interpolation in these points). However, the inverse function will be deter¬
mined as a finite sum of Laguerre functions, which represents it over every
finite time interval 0^t1-^tSU<co-
Laplace transforms which satisfy the formerly stated conditions are fre¬
quently met with in the analysis of stable networks of electrical engineeringand in regulation problems. Here the singularities of the transfer function are
mainly poles which lie to the left of the imaginary axis. Because it is difficult
in general to find an explicit expression for the transfer function, it is usually
measured experimentally at various frequencies (these can be chosen directly,
and are those mentioned above).In Chapter II, the general method of inversion is developed, while in the
remarks other types of transforms, not satisfying exactly the above require¬
ments, are treated. Besides, the convergence of the Laguerre series is fully
discussed. It is proved that this method delivers, for t = 0, the actual value f (0)1
of the original function and not its mean value — f (0) as in the case of Fourier
inversion.
Chapter III treats the case where the position, and only the position, of the
dominant pole*) of the transform is known. Thus, we are able to obtain the
asymptotical behaviour of the inverse function as well. Numerical examples
are given at the end of each chapter.
In Chapter IV, a practical problem concerning a position control system is
completely solved. The results are found to be very satisfactory and confirm
the stability of this method.
Chapter V deals with the application of the method of Chapter II to the
problem of the linear flow of heat.
The appendix contains the program necessary for the practical use of this
method on computers. It is written in the Algol language.
*) The pole having the largest real part.
7

CHAPTER II
Inversion of the Laplace Transforms using Laguerre Functions
/. Development of the method
00
The Laplace transform F (p) = J f (t)e_ptdt, considered as a functiono
of the complex variable p = s + i co, is assumed to be analytic in the right half
plane including the imaginary axis. Further, let lim {pF (p)}, p = io>, exist
and be finite and uniquely determined as p approaches infinity in both direc¬
tions of the imaginary axis*). Besides, assume F (p) can be calculated numer¬
ically at arbitrary points of the imaginary axis. This is almost always the case
in stable networks, where the frequency response is known.
The main idea of this method of inversion consists in finding a suitable
representation of the given transform in its domain of regularity, using a
certain class of functions whose inversion is known. For this purpose, we make
use of the conformal mapping
/ —P(1)
l + P
of the complex plane on itself; / is a real positive number (see II.3, Remark 3).This transformation maps the entire right half plane into the interior of the
unit circle. The unit circle itself becomes the image of the infinite imaginary axis.
Let us now introduce the function
G (p) = (/ + p) F (p). (2)
It remains finite even as p tends to ± i oo. The reason why we multiply F (p)
by (I + P) will be explained later. Further, we express G (p) in terms of the
new variable z and denote the resulting function by G (z). This function is
finite on the unit circle and analytic in its interior. We approximate G (z) by
a polynomial
P (z) =n^Ck zk (3)k = 0
and calculate its coefficients Ck by interpolation to the function G (z) in
*) For the refinement of the method we shall assume sometimes F (p) to be regular at
infinity.

n points on the unit circle*). We divide the unit circle in n equal parts and
numerate the points of division in a clockwise sense beginning from the pointz = 1 (the image of p = 0). Moreover, let us denote the n-th root of unity by
w = e_i9,
2tcwhere & =
. It should be noted that wn = 1 or
n
wn—1 = (w—1)(1 + w + w2+ ... + w"-1) = 0,
n—1
that is, J] wk = 0 for a root of unity w ^ 1. In generalk = 0
n—1
£ Wmk = 0, wm # 1,k = 0
for wm is also a root of unity. In other words
"yV*=
( n f°r m = °' n' 2n' -'(4)
k^0 \ 0 otherwise. l '
The points of division on the unit circle will be
zv = wv = e-iva,v = 0, 1,2, ...,(n-l).
The inverse images of these points lie on the imaginary axis of the p plane,symmetrically with respect to the origin, and are given by
icov = U tan (v&/2), v = 0, 1, ..., (n— 1).
Let now P (z) interpolate G (z) in the points zv.
P (zv) = G (zv) = G (i«v) = (/ + i<> F (icov), v = 0, 1, ..., (n - 1).
This yields the following system of linear equations for the determination of the
polynomial coefficients Ck:
n^Cm wvm = (/ + i<> F (icov), v = 0, 1, ..., (n - 1).m = 0
*) Harmonic analysis. However, if n —> oo the polynomial (3) becomes the Taylor ex¬
pansion of G (z) at the point z = 0 and the coefficients C^ become its Fourier coefficients.
This series converges everywhere in the interior of the unit circle.
9

10
57):85,p.result:8;75,p.40;78,p.3;75,p.3;81,p.
[4]:(seefollowsasstepsinoutcarriedbewilltransformthisofinversionThe
1+q)k+(2/I+p)k+(/
(-l)kqk(/-p)k
—/.p=q
variablenewtheintroduce
weplacefirsttheIninverted.becouldfunctionsrationalresultingthethat
soonebynumeratortheofthatexceedsdenominatortheofdegreetheway
thisIn(2).inp)+(/by(p)Fmultipliedhavewewhyobviousisitplacethis
Atdetermined.beeasilycaninversionwhosetransformsLaplacesimpleare
P)k+(/...,(n-l),1,0,=k1^-,
-^ —p)k(/
functionsThe
(/+p)K+1o=kp/+\/o=(/+p)kp)+(/(6)•
ot+i,,,^L=
in—1ck£~=(p)f
and
0=k
G(z)~£Ckz<,k
n—1
namely(p),Fand(z)GforrepresentationsfollowingthehaveweThus,
defined.completelyis(z)Gof(z)PpolynomialapproximatingtheNow,
v=0n
(5)1).-(n...,1,0,=kw"vk,(itov)Fi«v)+(/£-=Ck
nCk.is
thatandk,=mforonly05^valueahassideright-handthe(4)toAccording
wvc°-k>.2cm£=cmwv(—«££
=w-vk(icv)Fi<>+(/£v=0m=0v=Om=0
£cmw^-«=£cm2>£
=
n—1n—11—nn—1
1).—(nto0from
voversumandvkwbysidesbothonmultiplywesystemthissolvetoorderIn

Laplace transform Inverse function
1e"2/t
(2/+q)
1 tk
(2/ + q)k+1 k!e"2/t
qk 1 dkq(tke"2/t)
(2/ + q)k+1 k! dtk
(/ + p)k + 1 k! dtk
The last inverse function can be expressed in terms of the Laguerre functions.
These are defined as (see [6])
et/2 dk.
t
They build an orthogonal system of damped functions in the interval (0, oo)
and have all the value 1 at t = 0.
Hence we can write the last inverse function of the table above as
(-l)k/k(2/t).
Inverting F (p) in (6) term by term we obtain its inverse function f (t)
f(t)~n£1(-l)k 0^(2/1). (7)k = 0
Since /k (t) takes on real values for real arguments t, so should f (t). Therefore,
in (7) we shall need only the real parts of the coefficients C^. If we write
Ck = £k + i%»
f (t) reduces to
f(t)~nS1(-l)Hk/k(2/t). (8)
11
On the other hand, let
(/ + iwv) F (iwv) = av + i(3v.
Substituting this in the expression (5) for Ck we get for the real part
1 "-1/ 2tt 2n\
lk = — >, lavcosvk pvsinvk . (9)n
v = o \ n n '
In almost all practical cases and especially in electrical networks, the trans¬
form F (p) takes on real values for real arguments. Moreover, the points of
division on the unit circle zv and zn_v are conjugate complex. Hence, accord¬
ing to the Schwarz principle of reflection, the values (/+ icov)F(iwv) and
(/ + io>n_v) F(ia)n_v) in the sum (5) will be conjugate complex. Thus, the
coefficients Ck will be all real. That is, the imaginary parts 7)k are not present
at all.
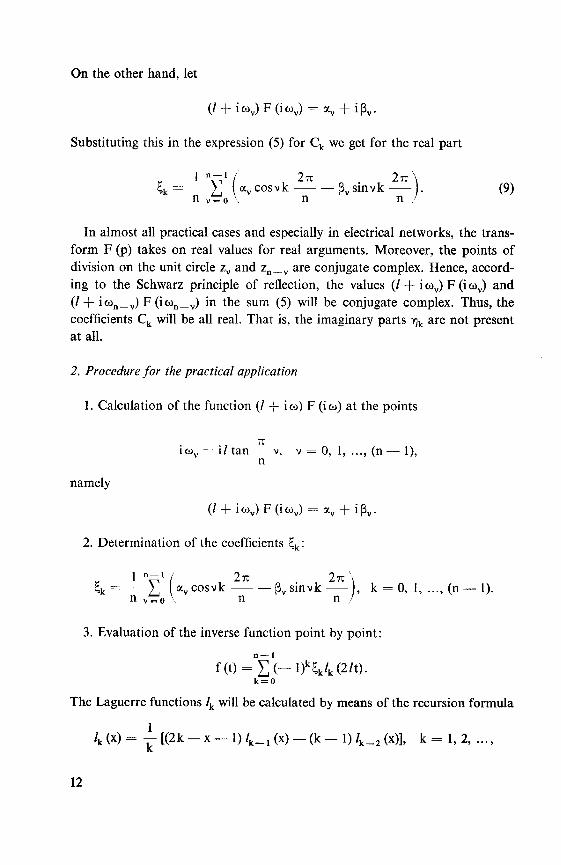
2. Procedure for the practical application
1. Calculation of the function (/ + i to) F (i oj) at the points
icov = i/ tan -
v, v = 0, 1, ..., (n — 1),n
namely
(/ + itov) F (icov) = ocv + ipv.
2. Determination of the coefficients \y:
1 n-'/ 7-k 2n\
Kk = — L «v cosvk (3V sinvk ,k = 0, 1, ..., (n — 1).
nv = o \ n n /
3. Evaluation of the inverse function point by point:
f(t)=n£(-l)ki;k/k(2/t).k = 0
The Laguerre functions lk will be calculated by means of the recursion formula
k W =
yK2k - x - l) 4-i W - (k - l) /k_2 (x)], k = l, 2, ...,
12

where /_, (x) = 0 and l0 (x) = e~x/2.
3. Remarks
1. This method of inversion can be modified somewhat to suit the case where
the transform F (p) is given on an axis parallel to the imaginary axis and which
lies entirely in the domain of regularity of F (p). Let this axis have the equation
p = a, where a > 0. The parallel translation q = p — a reduces this case to
the previous one. Hence, we invert F (q) as before and then multiply the result
by the factor eat to obtain the inverse of F (p). This parallel translation can be
used in order to avoid any finite singularities of F (p) which may lie on the
imaginary axis of the transform plane. In this case the value of F (p) on this
new axis will be needed.
2. Let p = oo be an essentially singular point of F (p); the value F (i oo) will
be required in calculating (/ + iwv) F (i^v) f°r v — n/2- The point p = oo
corresponds to the point z = — 1 by means of the conformal mapping
/+P
Hence, if G (z = — 1) can not be easily calculated, then we make the regulardivision as stated before, not on the unit circle | z | = 1 but on a concentric
one with radius r, 0 < r < 1. Its inverse image in the transform plane is againa circle which lies entirely to the right of the imaginary axis and has its centre
on the real axis. On this circle the function (/ + p) F (p) is completely defined.
The points of division in the z plane are in this case
zv = rwv
where w = e—l2"/n. The inverse images in the transform plane are
1 — zv / (1 — r2) + i2/r sin v27r/np„ = s„ + io)„ = / =
.Fv v
l + zv (1 + r2) + 2rcosv27r/n
The procedure for the determination of the coefficients £k should be modified
as follows:
13

G^-^C^k = 0
Gv = G (zv) = (/ + pv) F (pv) = a, + ipv
n—1
= £Ck(Zv)kk = 0
at\ckTk) Wvkk = 0
1 t 1
nr v=o
=—r- Y" (av + i(3v) cosvk h i sinvknr^vfo \ n n /
1 n—' / 2tc 27t
£k = 3d {Ck} = —j-V (ccv cosvk pv sinvk
nr v=0\ n n
3. Choice of /: In the following, we shall assume F (p) to be regular at infi¬
nity. The mapping parameter / affects a dilatation in the transform plane,because
l-V=
1-(P/Q
/ + p 1 + (p//)'
For every finite positive /, the right half plane will be mapped into the unit
circle and the imaginary axis will always have the unit circle as image, see
Figure II-1. According to our assumptions for F (p), the singularities of G (z)can only lie outside this circle. Now, if we let the degree of the approximating
polynomial P (z) tend to infinity, we obtain the Taylor expansion of G (z) at
the point z = 0. This series converges inside the circle with centre at the originand passing through the next singularity of G (z); accordingly, its radius is
greater than 1. Thus, the convergence of this series on the unit circle can be
accelerated by making the circle of convergence as large as possible. This can
be achieved by an appropriate choice of /. In this way, the approximation of
G (z) by a polynomial P (z) of fixed degree (n — 1) will be improved.
As said before, a circle having its centre at the origin of the z plane will have
as inverse image, a circle with centre on the real axis. Here, the circle of con-
14

\N_ N
sC t^j *** Uj
/ /\ !>
•=jf / \ wX /
u.
c
N
3
c
to
15

vergence lies to the exterior of the unit circle. Therefore, its inverse image will
lie entirely in the left half plane. Moreover, it should be noted that the point
z = oo is the image of p = — / (Figure II-1). Hence, enlarging the radius of the
circle of convergence will mean diminishing that of its original image. Accord¬
ingly, if we can guess where the singularities of F (p) may lie, even as a cloud,
then we try to enclose them inside the circle lying entirely in the left half plane,
having its centre on the negative real axis, and subtending the smallest angle
at the origin. The length of the tangent from the origin to this circle is the re¬
quired /.
The following special cases should also be stated:
i) Simple real pole — a, a > 0: In this case it is quite clear that / will be
directly equal to a. The image of this pole will lie at infinity.
ii) Two conjugate complex poles — a ± ib, a > 0:
For fixed / the radius of the circle, with centre at the origin and passing
through their images, is given by
__
\[P — (a2 + b2)]M^4WT_
[(/_a)2 + b2]'
It is maximum for / = ]/a2 + b2 and this maximum is
|b|fmax
V^+W-a'
1The original image of this circle will have its centre at (a2 + b2) and the
a
|b| ,,
radius y a2 + b2.In other words, this circle touches the radius vector of
a
each pole at this pole.
4. Choice of n: A reasonable value for n which compromises between accu¬
racy and calculation time, is found to be 24. This time is mainly proportional
ton.
5. Convergence of the Laguerre series: In our discussion we shall need a
theorem concerning the term by term inversion of series representing Laplacetransforms. For this purpose, we shall state it now (see [5], p. 186, Theorem
22.1):
16

Theorem
Let a function F (p) be represented as an infinite series:
F(p) = £Fk(p), Fk(p) = Je-"tfk(t)dt, k = 0, 1, ...,
k = 0 0
where all these integrals exist in a common half plane 91p ^ s0. In addition,
the following should hold:
a) The integrals
CO
je-pt|fk(t)|dt = Gk(p), k = 0, 1, ...,
o
should exist in this half plane, which implies that the integrals Gk (s0) exist.
b) The series
SGk(s0)k = 0
CO
should converge so that also ^ Fk (p) converges in 91p ^ s0 absolutely and
k = 0
uniformly.
CO
Then ^ fk (t) converges, even absolutely, towards a function f (t) for
k = 0
almost all t 2: 0, and f (t) is the original function of F (p), i. e.
GO CO
£Fk(p) «- £fk(t).k=0 k=0
The Laplace transform of f (t) converges for 91p ^ s0 absolutely.
In addition to the former assumptions for F (p), we shall suppose it to be
analytic also at p = oo. As said before, if we let the degree n of P (z), the
approximating polynomial of G (z), tend to infinity, P (z) will be identical
with the Taylor expansion of G (z) at z = 0:
CO
G(z) = £Ckzk (10)k=0
or, in terms of p,
17

£l fl— pxk
k = o \ / + p
If we use the relation (2) connecting G (p) with F (p), we get the following
representation for F (p):
« (/ — p)k
Before we apply the theorem above, we verify at first the assumptions stated
there:
Fk (P) = Ck (jl~f,r - fk (0 = (- Dk Ck/k (2/t).
All transforms Fk (p) exist in the half plane 9tp ^ s0 > 0.
a) Since |/k (x)| ^ 1 for x k 0, the following estimation holds:
T T T
Ye—* |fk (t)| dt = /"e—' |Ck/k| dt £ |CJ / e—'dt = ~[1 - e—^
o o
Hence,
T
Gk (s0) = lim / e-sot |fk (t)| dt g lim -L^i-[1 — e-s'T] = -i^-
< oo.
T—><aj T—>oo s0 s00
1 °°
b) Since the series (10) is absolutely convergent for |z| = 1, — £] ICJso k = o
is a convergent majorant of the series Y]Gk(s0). Therefore, the latter isk=o
convergent.
Hence, we can apply the former theorem and get
f(t) = £(_l)kCk/k(2/t), (11)k = o
which converges absolutely for almost all t ^ 0 towards the actual inverse
function of F (p).
18

Moreover, we shall prove that the Laguerre series (on the right-hand side
of (11)), together with all its derivatives, converges uniformly everywhere
over every finite interval 0 ^ t ^ T < oo. Let us denote by <& (t) the function
represented by the Laguerre series (11), i. e.
O (t) = g (- l)k Ck/k {lit) = £ fk (t), (12)k=0 k=0
and let f (t) be the actual original function of F (p). The last theorem states
that f (t) and <X> (t) are identical except over a set of measure zero. Since F (p)is assumed to be analytic at infinity, f (t) will be an integral function of the
exponential type (see [5], p. 191, Theorem 22.3). Because |/k(x)| ^ 1 for
x ^ 0, k = 0, 1, 2, ... (see [10], p. 159), the following estimation holds:
ifk(t)i = i(-i)k cy.a/omcj
for all t ^ 0. Besides, the Taylor expansion (10) of G (z) converges absolutelyCO
on the unit circle so that ]T | Ck | also converges. Therefore, this is a convergentk=0
majorant for (12) whose terms are independent of t. Hence, the Laguerre series
converges uniformly (even absolutely) towards O (t) over every finite interval
0 ^ t ^ T < oo. Since the Laguerre functions are continuous for t ^ 0,
O (t) will be also continuous. Thus we have two functions, O (t) and f (t),which are both continuous and which coincide with each other for t ^ 0
except over a set of measure zero. Therefore, they are identical
*(t) = f(t), t^0.
We shall prove now that the derivative of f (t), for t ^ 0, can be obtained
by differentiating its Laguerre series term-wise. For this purpose, we state at
first some properties of the Laguerre polynomials L£a) (x) (see [10], p. 96-98
and [11]):
(a) lk (x) = e-*-'2 Lfc (x), Lk (x) = Lf (x).
(b) ~ I4°> (x) = (- l)1l£_+» (x).ax
(c) e~x/21 L£° (x) I ^ (k + a), equality holds for x = 0.
The k-th term fk of the series (12) can be rewritten in the form
fk(t) = e-'t[(-DkCkLk(2/t)].
19
Differentiating this with respect to t we get
fk (t) = - /fk (t) + e-" — [(- l)k CkLk (2/t)]dt
= - /fk (t) + e-" (- l)k Ck (- 21) L^i, (2/t)
= - /fk (t) - 2/ [(- l)k Cke-" L*1!, (2/t)]
Using the property (c) of L^a) given above we can write
| (- l)k Cke-" U*L, (2/t) | ^ | C^| e-" | L<», (2/t) | g k | Ck | .
Therefore,
|fk(t)| g /|fk(t)| + 2/[k|Ck|] g MCJ + 2/MCkl]
and accordingly
£ [/ |Ck| + 2/(k |Ck|)] = /£|Ck| + 2#f;k|Ck|, (13)k=0 k=0 k=l
where the first series on the right-hand side converges as already proved. On
the other hand, the differentiation of G (z) in (10) yields
GO
G'(z) = £kCkzk-'k= 1
which converges absolutely on the unit circle |z| = 1. Hence, the series (13)
is a convergent majorant (whose terms are independent of t) of the derived
series
GO
k = 0
Therefore, it converges uniformly (even absolutely) over every finite interval
0^ t^T< oo. Moreover, it is known from the analysis that if a series
converges uniformly towards a function f (t) over a certain interval, and its
termwise-derived series is uniformly convergent (over the same interval), then
the latter converges towards the derivative of f (t). Hence,
20

Efk(ok = 0
converges towards f' (t). In the same way, we can prove that the higher derivat¬
ives of f (t) can be obtained from the former ones by further differentiation.
Thus we have the final result:
If F (p) is analytic at infinity, then the Laguerre series (11) converges uni¬
formly (even absolutely) over every finite interval 0 ^ t :g T < oo towards
the actual original function f (t), where F (p) is the Laplace transform of f (t).
The derviatives of f (t) can be obtained by differentiating the Laguerre series
of f (t) term-wise, which converges again uniformly (even absolutely) over the
same time interval.
This holds especially at t = 0 which is missing in the case of the Fourier
inversion.
4. Numerical examples
(See the Appendix for the program.)
1. Consider the transform
a
sin
p + 2F (p) = ,
a real,
(p + 1) sin —-
p + 2
which is regular at infinity and for which limp F (p) = a. It has simple polesp—> oo
at —1 and — I 2 ± ,k = 1, 2, ....
These accumulate at p = — 2 and
lie all on the negative real axis. The exact inverse is a monotone decreasing
function which falls from 0.3 at t = 0 to about 10-7 at t = 15 and is given by
sina.
1 " (— l)k sinak7t
f(t) = -—e-' + - £ ^ '—
sml -k k'Ti k
e-(2-^)' e-(2+^r)t
(kn — 1) (kic + 1)
The numerical inverse is compared with this function (for the parameters
21
1
/ ' \ ^^^/ / \ ^^/ ' \ —~_
I •!• J ^^
,
2-J.\ -2 -2+1 U 0
Figure 11-2.
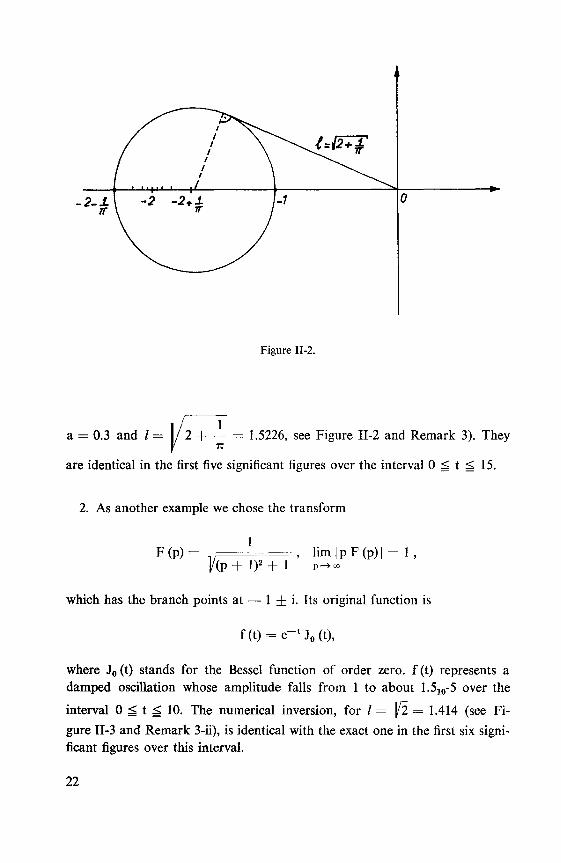
a = 0.3 and / = 1/ 2 -\ = 1.5226, see Figure II-2 and Remark 3). They
are identical in the first five significant figures over the interval 0 ^ t ^ 15.
2. As another example we chose the transform
F(p)=17=L=-> lim|PF(p)| = l,]/(p + l)3 + 1 p-»»
which has the branch points at — 1 ± i. Its original function is
f(t) = e-lJ0(t),
where J0 (t) stands for the Bessel function of order zero, f (t) represents a
damped oscillation whose amplitude falls from 1 to about 1.510-5 over the
interval 0 ^ t ^ 10. The numerical inversion, for I = ]/2 = 1.414 (see Fi¬
gure II-3 and Remark 3-ii), is identical with the exact one in the first six signi¬ficant figures over this interval.
22

Figure II-3.
3. The following example is chosen to show the applicability of this method
to Laplace transforms which are not regular at infinity. Let us consider the
function
F(p)ShaVp
(p + 1) Sh 1/p,a< 1;
it has simple poles at — 1 and —k27r2 (k = 1, 2, ...) which accumulate at
infinity, lim [p F (p)] is zero as p -+ oo on all straight lines passing through the
origin, except in the direction of the negative real axis. The exact originalfunction is given by the series
f(t) =sma
sinl
£i k(— l)ksinakTC., „
2,1 V -i '- e~kn
'.
A (k27r*-l)
The transform F (p) is inverted numerically for a = 0.5 and 1=1 (in this
case / is arbitrary). Figure II-4 shows this result as well as the deviation from
the exact inverse.
23

f(t>
03.
0.2.
0.1.
Figure II-4a. The inverse function (Example 3).
Figure II-4b. The error (Example 3).
24

5. Conclusion
This method of inversion has shown its merits of being accurate, stable,
and simple in its application. It gives the inverse function, to a reasonable
degree of accuracy, at every finite t S; 0.
A similar method of inversion using Laguerre functions is developed in [8],
p. 292-303. It expands the function G (z) at the point z = 0 in a Taylor series
and determines the inverse function as a Laguerre series having mainly the
same coefficients. Numerical examples using this method have shown that
in most cases of technical significance, the computation of the coefficients of
the Taylor series from the derivatives of G (z) is, from the numerical point of
view, not feasible with sufficient accuracy. Accordingly, the Laguerre series
representing the inverse function does not converge towards the actual value
except for a very narrow time interval and with a poor degree of accuracy.
CHAPTER III
Laplace Transforms with known position of the Dominant Pole
We suppose that the position of the dominant pole of F (p) is approximately
known, while the residue in this pole can not be calculated easily. In the follow¬
ing we shall discuss two practical cases, the first concerning a simple real pole,the other a conjugate complex pair.
/. Simple real dominant pole
Let a be this pole, a < 0 real. Its image in the z plane by means of the former
conformal mapping (1) is
/ — a
a = ;/ + a
it lies again on the real axis of the z plane. We construct the function G (p) =
(/ + p) F (p) and express it in terms of the new variable z as before. Here we
interpolate the function G (z) by a rational function R (z) of the form
n—1
£ckzkR(z) = — (14)
z — a
25

which takes on the values Gv at the points zv, v = 0, 1, ..., (n — 1), namely
R (z,) = Gv = G (zv) = G (wv) = G (icov),
where wv and <ov are the same as defined in Chapter II. The coefficients Cj,are determined by means of the following system of linear equations
n—1
k = 0
_^Ckwvk = YVJ v = 0, 1, ...,(n-l),
where
Yv = (wv-a)Gv.
The solution of this system is obtained as before (see Chapter II)
Ck = -n£Yvw-v\ k = 0, 1, ...,(n-l).n
v = o
Expression (14) can be rewritten as
n— 1
L CkzkU n-2
R(Z)=J^» =_b=-l_ + SbjZi.z — a z — a j = o
Thus, we can calculate bj (j = — 1,0, 1, ...,n — 2) in terms of the C^ (k = 0,
1, ...,n — 1). This yields the following recursion formula
bj = Cj+1 + abJ + 1, j=— 1, 0, 1, ..., (n —2),
where bn_, = 0. Hence, we can write now
G (z) ~ R (z) = ~^L +n£2bkZK (15)z — a k^o
and get the following representation for the Laplace transform
F(p) = 7/-^TG(p)(f+ P)
26

l + p
b_,(/ + a) ,'n2. (/-P)"
2/(p-a) k^0ka+p)k + 1'
The inverse function of the first term is
(/ + a)
2/9t{b_,}eP
(/ —p)k .
and that of r—p is (— 1) L (2/t) as in Chapter II. Hence, the resul-(/ + p)k+I
v k F
tant inverse function of F (p) becomes
f(t)~-(/ + a)
2/
n—2
"I]k = 0
31 {b_J eat + £ (- l)k 31 {bk} lk (2/t). (16)
As in Chapter II, if F (p) takes on real values on the real axis, the coefficients
Q, and consequently the bk, will be all real. It should be noted that the above
expression for f (t) gives its actual as well as its asymptotical behaviour. Because,
if we expand F (p) around the dominant pole p = a in a Laurent series, the
principal part will have the form
p —a. The corresponding asymptotical
part of f (t) becomes
3l{A}eat.
On the other hand, the process of inversion described before will yield the
following:
F(p)p —a
+ regular part at p = a,
G(p) = (/ + p)p —a
+ regular part at p = a,
27

1—z) AG (z) = (/ + / + regular part at z == a
1 + z ) 1 —z/ a
1 + z
2/A
regular part at z = a
(/-a)-z(/ + a)
— 2/A= h regular part at z = a.
(/ + a) (z — a)
Comparing this representation of G (z) with (15) we get
— 2/Ab
,=
.-1
(/ + a)
Substituting this in the expression (16) of f (t) we obtain
2/l ~u
2/ (/ + a)
= 3i{A}eat. q.e. d.
Therefore, we have a numerical method for determining the residue A of
F (p) in the dominant pole a.
1/ 1As a numerical example we considered the first one in II.4, for / = 1/4
y it2
= 1.9745 (see Figure III-l and Remark III.3.1); the dominant pole is a = — 1.
Figure III-2 shows the inverse function as well as its asymptotical part. The
comparison between this f (t) and the exact inverse function shows that the
results are accurate to five significant figures.
2. Conjugate complex pair of dominant poles
Let us denote these poles by
^i>2 =a±ib,a <0.
28

Figure III-l.
Figure III-2. The inverse function and its asymptotical part.
29
Their images in the z plane will be again conjugate complex and are given by
(/2_a2_b2)Ti2/b1,2 ^
(/ + a)2 + b2
We construct the function
G(p) = (/ + p)F(p)
/ —pas before and express it in terms of the variable z = to obatin G (z).
/ + p
We interpolate now this function by a rational function of the form
n—1
£ckzkR(z)
(z-^Mz-Q
which takes on the values Gv at the points zv as in Chapter II. The coefficients
Ck can be then calculated by means of the resulting system of linear equations
n—1
k = 0
£Ckwvk = Yv, v=0, 1, ...,(n-l).
where
Yv = [(wv + <x)2 + P2] Gv, v = 0, 1, ..., (n - 1).
The solution of this system is given by
Ck = - n^Yvw-vk, k==0, 1, ...,(n-l).n v=o
Thus the function R (z) is now completely defined. We write it in the form
ax a, n^3
The new coefficients a1; a2 and bj can be determined in terms of Ck:
30

bk = Ck + 2-(<*2+P2)bk + 2 + 2abk+1, k = 0, 1, ...,(n-3),
where bn_j = bn_2 = 0 and
k = 0
Ki— C2 2(3 k = 0
10,1*,
n—1
Eck£k=0
£2 — £i 2(3 k=o
Therefore, we write
G(z) ~R(z) = —^- +-^- + £ bk
Z — (=i Z — <,2 k=0
(17)
and
F(p)1
(/ + P)
1
(/ + P)
G(p)
/-pCi
/-pv
+k?obklTT7/ + p / + p
^2
i
Yiai (/ + Tti) a2 (/ + 7r2)
P — % P — TC2
nv3b (/~p)k
"Ak(/ + P)k+1"
The first two terms, together with the factor before the bracket, have the
inverse function
1
JR{a1(/ + 7t])e"'t + a,(/ + 7t>)e*'t}
— eat [A cos bt — B sin bt]2/
L (18)
where
31

A = (/ + a)(Tl + y2)-b(S1-S2),
B=(/+a)(81-S2) + b(Yl + y2)
(19)
and
ai = Ti + iSi,
a2 = y2 + iS2,
so that the inverse function of F (p) becomes
f (t) eat [A cos bt — B sin bt] +°£ (— l)k 9t {bk} lk (2/t).2/ k = o
This formula includes both the actual as well as the asymptotical behaviour of
the inverse function. We shall prove, in a similar way as in III.2, that the terms
before the sum give the asymptotical part of f (t). Let the principal parts
corresponding to the dominant poles be
Ax+
(A1 + A,)(p-a) + ib(A1 —A^
(p-*i) (P-O (p-a)2 + b2
The asymptotical part of f (t) is the inverse of this expression, namely
eat [91 {A1 + A2} cosbt + Sft {i (A1 — A2)} sinbt].
Inverting F (p) as before we get:
Ai A2F(p)
G(p) =
G(z)
(P — ^i) (p — rc2)+ regular part at p = iz1>2
MZ + p),
A2(/ + p)
(P — *i) (P — ^2)regular part at p = nU2
AAl + l1—z
AAl+l1—z
l+z 1+z
regular part at z = £t.
32

=
7TT—V7Z FT—
77T—V7Z FT + reSular Part at z = ^u •
(/ + Ttj) (Z — y (/ + 7r2) (Z — Q
Comparing this expression with (17) we have
— 21A1a, =
(/ + *i)
— 2/A2a, = .
Substituting this in the expression (18) for the asymptotical part we obtain
-~fft{nx(l+ tO e"" + a2 (/ + rt2) e""}
= —— 31 {— 2/Aie(a + ib)t—
2/A2e<a-ib><}
2/l ;
= eat 81 {Aieibt + A2e-ibt}
= eat [3* {A± + A2} cosbt + 31 {i (Ax — A2)} sinbt] q. e. d.
However, if the transform F (p) takes on real values on the real axis, then,
according to the discussion of Chapter II, the coefficients C^, and consequently
bk, will be all real. The coefficients a! and a2 become conjugate complex. That is
Yi = y2 = T and Sj. = — S2 = §
or
a12 = y ± i8.
Hence, (19) becomes
A = 2Y(/ + a) —2Sb,
B =2S(/ + a) + 2yb.
As a numerical example we chose the function
33

1
v t +is A ^^v. 1/ 11 Vs. i/ i i/ / i
/ /YSs£^
/ / \ ' ^^/ / iI ' i 1 1 ^^
\ ~2'1 H/ i/ t
0
-i
Figure III-3.
6 t
Figure III-4 The inverse function and its asymptotical part.
34

F(p) =1 1
(p + l)2 +T+
"(p~+2)2+l '
which is regular at infinity lim p F (p) = 0; it has its dominant poles at
p— 00
— 1 ± i. Figure III-3 shows that the appropriate value of / is ]/5 = 2.23606.
The numerical inverse function as well as its asymptotical part are shown in
Figure III-4. A comparison with the exact initial function
f(t) = e-'(l +e~t)sint
shows that the absolute error is less than 1.510-10 over a time interval of
0 ^ t ^ 10, where the amplitude of oscillation falls from 0.47995 to 0.00060.
3. Remarks
1. Since the images of the dominant poles of G (p) are no longer poles of
Y (z), / should be chosen in such a manner that the images of all poles, other
than those of the dominant poles, will be located as far as possible from the
unit circle (see Chapter II.3, Remark 3).
2. The farther the remaining poles of F (p) lie with respect to the dominant
poles, the more accurate will be the asymptotical part of f (t).
3. Numerical experiments have shown that the determination of the asymp¬
totical part is sensitive to the number n of division points. It should not be
chosen too large.
CHAPTER IV
Poistion Control System with Load Disturbance
This system (see [1], p. 377) is subjected to both input and load disturbances.
Shown in Figure IV-1 is a block diagram representing the system being con¬
sidered.
The position input R is compared to the controlled variable position C in
a selsyn control transformer, and the difference E appears as an a-c voltage
signal. A discriminator-amplifier rectifies and amplifies E to produce Ml5 from
which is subtracted B^ The feedback voltage M2, the net signal, is amplified
35

Selsyn
control
transformer
R E
Discnminatoi,
preamplifier
Amplifier,
amphdyne
+
M, M2
En 01
voltage
nC
K2
(Tfp+l)(T11p+l)
uB,
Disturbance
load torque
1*R/KT
_+
M. M,
Filler
K6p2(T6p + 1)
(T, p+l)(Tbp-|- l)(T,p+l)
Motor Controlled
and \om\ variable,
cK.,
P(Tmp+l)
Acceleration
feedback
K5p;
Velocity
feedback
K,p
Figure IV-1. Block diagram showing position control system subjected to input position
motion and disturbance load torque.
Kx = 14.8 volts/radian
K2 = 2300 volts/volt
K3 = 0.526 radian per second/volt
K4 = 0.98 volt/radian per second
K5 = 0.01368 volt/radian per second2
Ke =0.193 second2
Tf = 1/31.5 = 0.0317 second
Tq = 1/17.6 = 0.0569 second
Tm = 1/9.1 = 0.110 second
Ta = 1/0.986 = 1.014 seconds
Tb = 1/5.26 = 0.19 second
T6 = 0.016 second
T, = 0.0016 second
R/KT = 0.855 volt/pound-foot
36

by an amplifier and an amplidyne, the voltage of which M3 is impressed on the
d-c motor with attached load. A disturbance load torque TL is also applied to
the load. A tachometer and an acceleration generator supply d-c voltages to
the filter, the output of which is the feedback voltage Bj. It is desired to deter¬
mine the output motion both for the different motions of R and for the applica¬tion of various torques TL.
By making use of the equivalent block diagram for a motor with electrical
and mechanical inputs applied, Figure IV-1 may be redrawn as is done in
Figure IV-2, where, in addition, the feedback circuit is shown in a somewhat
simplified form. The literal form of a transfer function is shown above the
block to which it refers.
Since the system is assumed to be linear, superposition of the effects of the
two inputs may be applied; thus the output response for each input may be
determined independently. The various steps in the process of regrouping the
transfer function blocks for each input are described below.
/. Determination of C/R
For this purpose the load torque TL is set equal to zero. The elements G2
and G3 are combined to form G7, and the block diagram appears in the form
shown in Figure IV-3. The effect of feeding Hx around G7 results in the effective
transfer function G8, which is shown in Figure IV-4. The process of determiningthe C/R from Figure IV-4 is quite straight forward. The various transfer
functions indicated in Figures IV-2, IV-3, and IV-4 are given below:
GKa
G3
(Tfp + 1) (Tqp + 1)
K3
P(TmP+l)
2 3
G7 = G2G3 —
Hx =
p(Tmp+l)(Tfp+l)(Tqp+l)
K4K6p3(l + <K5/K4)p)(T6p+l)
(Tap+l)(Tbp+l)(T7p+l)
37

R^+/-n E
^o
M, M,
MB,
nC
K,
(Tfp+ l)(Tqp+l)
K,
P(TmP + D
K4K6p3 1+KTP (r«p+i)
(T,p+l)(Tbp+ l)(T7p+l)
Figure IV-2. Alternate representation of system of Figure IV-1.
G7
-vE
K, SV-)2
G2G,C
,C
iB,1 '
H,
' '
Figure IV-3. Simplified block diagram of system of Figure IV-2 (with TL = 0).
M, G7-> » K,
C
.c
1 i G,H,
' '
Figure IV-4. Further simplification of block diagram of system of Figure IV-3 (with TL = 0).
38
K2K3K4K6p2 (1 + <KS/K4> p) (T6p + 1)
KjGg =
(Tap + 1) (Tbp + 1) (T7p + 1) (Tmp + 1) (TfP + 1) (Tqp + 1)
K,G7
1 + G7Hj
KiK2K3
p(Tmp + l)(Tfp+l)(Tqp + l)
K2K3K4K6p3 (1 + <K5/K4> p) (T6p + 1)
p(Tap + 1) (Tbp + 1) (T7p + 1) (Tmp + 1) (Tfp + 1) (Tqp + 1)
=
K,K2K3 (TaP + 1) (Tbp + 1) (T7p + 1)
K2K3K4K6p3(l + <K5/K4>p)(T6p+l)+p(Tap+l)(Tbp+l)(T7p+l)(Tmp+l)(Tfp+l)(Tqp+l)-
Hence, we obtain for the resultant transfer function
C/R =K'Gs
=
K,K2K3 (Tap + 1) (Tbp + 1) (T7p + 1)=
Pjjp)1+K^ P7(p) P7(p)'
where
P7 (p) = £ a,pij = o
= K,K2K3 (Tap + 1) (TbP + 1) (T7p + 1) +
+ K2K3K4K6p3 (1 + <K5/K4> p) (T6p + 1) +
+ P (TaP + 1) (Tbp + 1) (T7p + 1) (Tmp + 1) (Tf p + 1) (Tqp + 1)
and
P3 (P) = t bkPk_
kfk = 0
The numerical values of the coefficients are as follows :
b0 = 1.7905104 a0 = 1.7905104
bx = 2.1592104 at = 2.1593104
b2 = 3.4868103 a2 = 3.4882103
b3 = 5.5237 a3 = 2.3479102
a4 = 6.9084
a5 = 5.365310-2
a6 - 4.215910-5
a, = 6.1150lft-8
39

In the following we shall denote this transfer function by
I>kPkk=0
U!(P)==^
j = 0
2. Determination of C/T^
When the effect of the load torque disturbances is considered, the position
input R is set equal to zero and the block diagram appears as shown in FigureIV-5. In this figure the feedback function Hx and the error amplification Kxform a parallel grouping of elements, the effective transfer function of which
is called H2. H2 and G2 combine in series to provide the total feedback quantityfor the forward function G3 as shown in Figure IV-6. The process of determin¬
ing C/TL for the block diagram shown in Figure IV-6 becomes analogous to
that for the normal feedback case when it is realised that the polarity of the
feedback quantity is reversed before it appears at the point where it "adds" to
the load torque. The transfer function C/TL is given by
TtR 4 ^
M
CiZ
* Ma
H2
i r
~
1
C iH, * 1 '
G2 46
1 M,K,
N +
11 ^R=0
Figure IV-5. Simplified block diagram of system of Figure IV-2 (with R = 0).
40

TL> R/KT ^fn M3G3 £
T
4
H3
G2H2
Figure IV-6. Further simplification of block diagram of system of Figure IV-5 (with R = 0).
where
Hi
C/TL = (R/KT)1 + G2G3H2
'
K,
(Tfp + l)(TqP+l)'
P(TmP+D
K4K6p3(l + <K5/K4)p)(T6p+D
(Tap+l)(Tbp + l)(T7p+l)
H2 — Ht + Kt
K1(Tap+l)(Tbp+l)(T7p+l)+K4K6p3(l+<K5/K4>p)(Ttp+l)
(Tap+l)(Tbp+l)(T7p+l)
=
K2K3[K1(Tap+l)(Tbp+l)(T7p+l)+K4K6p3(l+<K5/K4>p)(T6p+l)]232
P (Tap + 1) (Tbp + 1) (T7p + 1) (Tmp + 1) (Tfp + 1) (Tqp + 1)
Hence we get for the resultant transfer function
U2(p) = C/TLp,<p) syp7(p)
j = 0
41

where
P5 (p) = (R/KT) K3 (Tap + 1) (Tbp + 1) (T7p + 1) (Tfp + 1) (Tqp + 1)'ql
5
k = 0
and its coefficients are as follows:
b£ = 4.497310-1
b,' = 5.821710-1
b'2 = 1.364210-1
b^ = 8.873510-3
b; = 1.702610-4
b^ = 2.502610-7
The polynominal P7 (p) is exactly the same as in IV. 1.
3. The outputs c (t) corresponding to different inputs on both sides
In the following we shall denote by c, (t) the output corresponding to the
input side R (Figure IV-1), while by c2 (t) that of the input side TL. This is
illustrated in Figure IV-7.
r(t) N aft) —+-c(t) tL (t) H uft) I—+>cft)
\ I
R(p)—»| //Tf/J~]—^(p) T (p)—*\ Ua(p)~\-+Ca(p)
Figure IV-7. Input-output relations.
42

a) Pulse response:
This is the output corresponding to a Dirca-pulse input. In the transform
plane, the input transform becomes
R (P) = TL (p) = 1
and the output transform will be
Cj (p) = U, (p) = j e-ptUj (t) dt, j = 1, 2.
o
Hence, we get for the output
Cfc(t) = u,(t), j = l, 2.
Both transfer functions Uj (p) satisfy the conditions of our inversion method
ofChapter II. Hence, we invert them by this method and obtain the correspond¬
ing pulse responses Cj (t), j = 1, 2, which are shown in Figures IV-8 and IV-9
respectively.
b) Step response:
The Input is given by
f 0 t < 0,
r(t) = tL(t) =
[ 1 t > 0.
The Laplace transform of this function is 1/p so that the output becomes
q (P) = - u, (P)p
=-i + F, (p), j = 1, 2,P
where
and
A! = u, (0)=1,
A2 = uss(0) = 2.511810-5
Fj =
£dkpkk = 0
EamPmm = 0
43
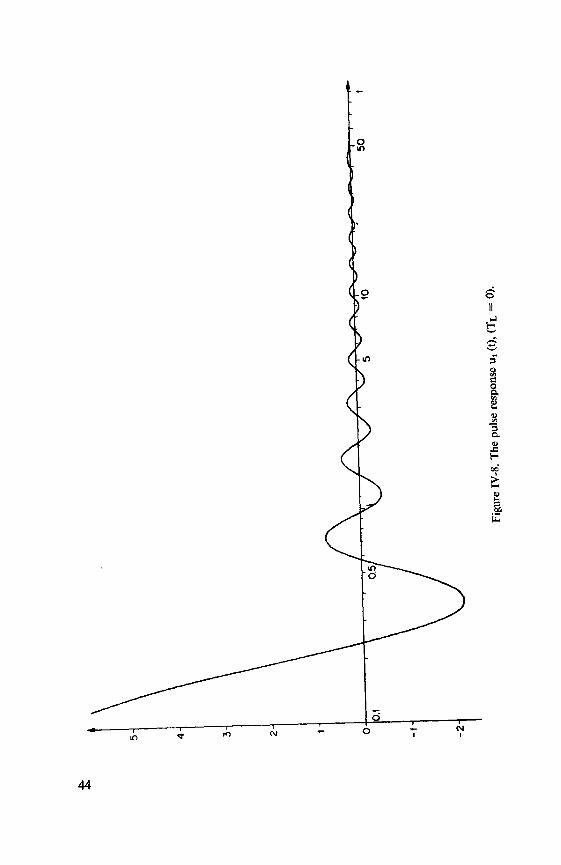
0).
-(TL
(t),
ux
response
puls
eThe
IV-8.
Figure
*

0).
=(R
(t),
u2
response
pulse
The
IV-9.
Figure
Ul*-

F2 = k-^ .
EamPmm = 0
The coefficients in the numerators are as follows:
d0 = -l d; = 3.980510-2
dt = — 1.4044 d; = 4.880710-2
d2 = — 2.2927102 d^ = 2.976110-3
d3 = — 6.9084 ds = — 3.259910-6
d4 = — 5.365310-2 d'4 = — 1.097410-6
d5 = —4.215910-5 ds = —1.058910-9
d6 = -6.114910-8 < = — 1.535910-12
The functions F} (p) are inverted using our method of Chapter II to get their
original functions fs (t) and the resultant outputs become
c, (t) = A, + f, (t), j = l,2.
These are drawn, together with their asymptotical parts Aj, in Figures IV-10
and IV-11 respectively.
c) Sinusoidal input:
Let the input be of the form
r(t) = tL(t) = cost.
Its Laplace transform is
R (P) = TL (p) =~j , (poles ± i),
which gives the output transforms
Cs (p) = -^~ U, (p),p2 + 1
whose dominant poles are again ± i. Since the residues, in this case, are
easily computed, we shall not use the method of Chapter III.2 but subtract
the principal part corresponding to them.
46

0).
=TL
(with
part
saymptotical
its
and
response
step
The
IV-10.
Figure
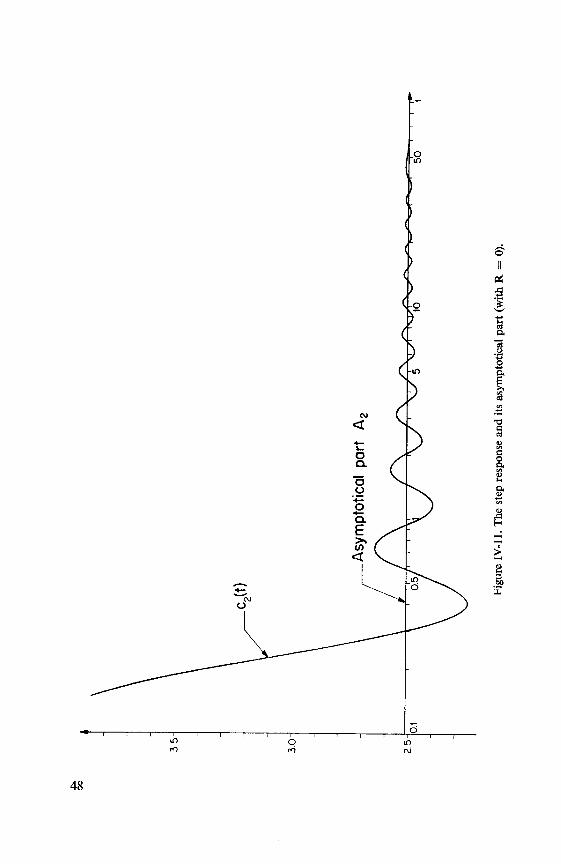
0).
=R
(wit
hpart
asymptotical
its
and
response
step
The
IV-11.
Figure

A: B,
Cj (P) = —j-r + '— + G, (p),p + 1 p —1
where
Aj = juj(-i) =1
y(xi-'yj)
B,= yUj(+i) =i
y (xj + [y)
and
xx = 1.0072 x2 = 2.524210-5
Yl = 5.132710-3 y2 = 2.369310-6
The transforms Gj (p) are as follows:
t^PkG1(p) =
k = 0
7
I>mPmm = 0
6
n (n\ -k = 0
E^p"m = 0
where
e0 = 91.902 <* = 4.242210-2
e1 = — 18.422 ei = 4.893410-2
e2 = — 2.3087102 e2 = 2.964410-3
e3 = — 6.9579 ea = — 3.990210-6
e4 = — 5.403910-2 e; = — 1.103910-6
e5 = — 4.200010-5 e5 = — 1.120010-9
e6 = 0.0000 < = — 1.000010-11
The functions Gj (p) have been inverted by our method of Chapter II to get
gj (t) which add to the asymptotical parts
49

0).
=TL
(with
part
asymptotical
its
and
(t)
Ci
output
The
IV-12.
Figure
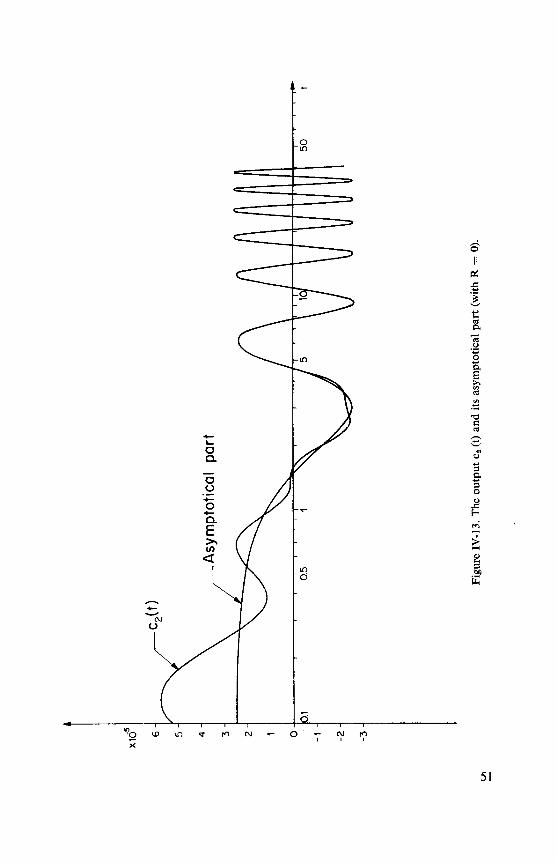
0).
=R
(with
part
asymptotical
its
and
(t)
c2
output
The
IV-13.
Figure

(Xj cost — y; sint)
to give the outputs
Cj (t) = (Xj cost — Vj sint) + % (t), j == 1, 2.
These are shown in Figures IV-12 and IV-13 respectively and are comparedwith their asymptotical parts.
CHAPTER V
Linear Flow of Heat
1. Development of the method (see [9], p. 175)
The homogeneous body - e. g. rod, wall, etc. -, through which the heat
flows in the direction of the x axis, is supposed to occupy the interval (0, a).Both ends, x = 0 and x = a, should always be kept at the constant temperatures
0 and b respectively. Moreover, it will be assumed that at t = 0 a certain
initial distribution F (x) of the temperature is given over the interval (0, a),where naturally F (0) = 0 and F (a) = b. It is required to determine the
temperature U (x, t) at every point x and time t. In addition, U (x, t) should
satisfy the partial differential equation
82U
-G(x)
where c is a given constant and G (x) a given function (of x only). This problemcan be summarised mathematically as follows:
It is required to find a function U (x, t) which satisfies
1. the partial differential equation:d\J a2u
ax2
2. the boundary conditions: i) U (0, t) = 0 and
ii) U (a, t) = b,
and
3. the initial condition: U (x, 0) = F (x).
G(x)
(20)
52

Before we begin with the numerical solution of this problem, we homogeniseat first the second boundary condition - the reason will be explained later - by
introducing the new temperature
V (x, t) = U (x, t) - H (x), (21)
where H (x) is a function of x only which represents the steady state solution
(asymptotical solution, t -» oo). Because of
fulfil, according to (20), the conditions
d2H
0 this state H (x) must
dx2G (x), H (0) = 0, H (a) = b.
This is again a boundary-value problem for the determination of H (x). This
can be done by integrating the differential equation either exactly, in case G (x)is simple and explicitly given, or numerically, in case it is complicated or
numerically given. In the last case it is advisible to calculate H (x) directly at
the points x; given below.
Our problem takes now the new form:
Find V (x, t) which satisfies
1. the partial differential equation:
SV r d2V=c
G(x)
St [ dx2V
\
2. the boundary conditions: i) V (0, t) = 0 and \ (22)
ii) V (a, t) = 0,
and
3. the initial condition: V (x, 0) = F (x) — H (x) = F* (x).
In order to solve this problem numerically, we divide the interval (0, a) in m
equal parts, each having the length
h =m
and calculate the temperatures
53

Vj(t) = V(xj,t)
at the points of division
Xj == jh, j = 1, 2, ...,m— 1
for an arbitrarily chosen time t 2> 0; they are now functions of the time t only.The second derivative appearing in the differential equation will be approx¬
imated numerically by
dx2 h
so that this differential equation could be replaced by the system of ordinary
differential equations
dt= c
V,-, —2V, + Vi + 1— G4 , j = 1, 2, ...,
m —1,
where Gj = G (Xj) and V0 (t) = Vm (t) = 0. Now we introduce the new variable
T = th2
and get the following system
dV,
dT
i= Vj_,-2Vj + Vj+1-h2Gj, j= 1,2, ...,m-l. (23)
For the sake of simplicity, but without restricting the applicability of this
method, we shall put G (x) = 0. In this case the steady state is simply
H (x) = — x.
a
(24)
The last system will then reduce to
dV;i-= Vj_1-2Vj + Vj + 1, j= 1,2, ...,m-l. (25)
54

In order to eliminate the derivative on the left-hand side, we make use of the
Laplace transformation:
-* vj(P)
0 _> v0 (p) ee vm (p) & 0
-> pVj(p) — F*, j = 1, 2, ...,m — 1,
where, according to (24) and the initial condition in (22),
f; = fj--^-xj = fj-Aj, f; = f; = o.a. ill
Therefore, the system (25) will be transformed into
pvj —F* =vj_I— 2Vj + vj + I
or
-vj_1(p) + (2 + p)vj(p)-vj + 1(p)-F;, j = l, ...,m-l. (26)
Since the transforms Vj (p) are all analytic in the right half plane includingthe imaginary axis, we can make use of the method of Chapter II for the deter¬
mination of the initial functions Vj (t) and consequently Uj (t). If the boun¬
dary conditions had not been homogenised, the second would have yielded the
btransform um (p) = — which has a pole at p = 0.
P
Before we begin with the actual inversion, we evaluate at first these trans¬
forms, or, strictly speaking, the functions
Wj (p) = (1 + P) ^ (p), w0 (p) = wm (p) s 0,
at the points
& 2tz
pv = itanv —, # =,
v = 0, 1, ...,n —1.
2 n
Multiplying (26) by (1 + p), putting p = pv and writing
55
V;(T)
V0(T) = Vm(T)
dVj_dx

Wj (pv) = wjv = <xjv + ipjv
we get
—
w(j_1)v + ^2 + itanv~j wjv—w(j + 1)v= Fj M +itanv —
Comparison of real and imaginary parts on both sides yields
0(j-l)v + 2ajv — ao+ i)v— tanv
^' Pjv = Fj
ft ft
Pd-Dv + 2pjv — p0 + 1)v+ tanv — <xjv
= tanv —. F*
(27)
j = 1,2, ..., m—1,
where a0v = (30v = amv = (3mv = 0 for all values of v. The first of these equa¬
tions can be written as
Pjv = cotv —. [— a(j_1)v + 2ajv — a(j+ 1)v— Fi ] (28)
which, when substituted in the second equation, will yield the following system
of linear equations for the determination of the aJV:
&
EaiJaiv = -cos^~.(F*_1-F; + F:+1)+F,*,i=1.2,...,m-l, (29)j=i
where
(a,,) =
/A-C B C \/B A B C 0 |C^
B^
A_
C~~
B
B--„,
C
A'"'
B"'
C
\0 C B A B
C B A-C/
56

A = 5cos2v — + 1, B = — 4cos2v —-
,and C = cos2v —
.The solution of
this system, for every fixed value of v = 0, 1, ...,n — 1, delivers the unknowns
aJV,j = 1, 2, ...,m — 1. The corresponding (3JV are then obtained by direct
substitution in (28). Now the required numerical values of the functions
wj (p)> J = 1> 2, ...,m — 1, at the points of division pv are completely defined.
This is all that is needed for the numerical inversion by the method ofChapter II.
We summarise the steps of calculation as follows (j = 1, 2, ...,m — 1):
The function
w, (p) = (1 + p) Vj (p)
will be transformed by the conformal mapping
1-Pz =
1+P
to give w, (z), which will be approximated by a polynomial of the form
wJ(z)~ngc]kzk.
The coefficients Cjk are calculated by interpolation in the points (the images
0fpv)
zv = e-v».
wJV = ^ (zv) = w, (pv) = aJV + ipjv = £ Cjke ,vk9, v = 0, 1, ...,n — 1
n —1
k = 0
Cjk = - ^ w]Velvk9, k = 0, 1, ...,n—1.n
v = 0
£jk = 9* {Cjk} = - ^(a^cosvk* - pjv sinvkft).n
v = 0
The inverse function of
v](p)=TT7wJ(p)=k?C]k7]-^pT
57

becomes
viW=Y(-i)kwk(2T)k = 0
or, in terms of the original time variable t,
Hence, we get for the resultant temperature (see Relations (21) and (24))
Uj (t) = -^ j +£(- l)k £jk/k (~ t) , j = 1, 2, ...,m- 1.
2. Numerical examples
1. F (x) = x2, a = 4,
m = 4, n = 12.
2. F(x)= sin(yxj ,
m = 4, n = 12.
The results are shown in Figures V-1 and V-2 respectively. The calculated
temperatures Uj (t) approach their respective asymptotical values Uj (oo) with
increasing time t.
b = 16, c = 1.
a = b == c = 1.
58

12
11
10
1.Example
V-1.
Figure
67
6

^
i.^\\
60

Appendix
Program for the Method of Chapter II
A. Formal parameter list
n: Number of divisions.
/: Parameter of the conformal mapping.
r: Radius of the circle in the z plane, on which the division is made
(normal case r = 1).
d: Parallel displacement of the imaginary axis of the transform plane
(normal case d = 0).
10: Begin of the time interval.
delta: Time increment.
11: End of the time interval.
gl, g2: Arrays representing respectively the real and imaginary parts of the
function G (p) at the points of division.
Inform: Procedure which is responsible for printing the instantaneous value
of t and the corresponding value f of f (t).
61

B. ALGOL-program
procedure Lapinversion (n, /, r, d, tO, delta, tl, gl, g2, Inform);
integer n; real /, r, d, tO, delta, tl; array gl, g2; procedure Inform;
begin
integer i, k, j;real theta, p, q, si, s2, t, /0, /l, 12, m ,f;
array xi [0: n — 1], x, y [0: n];theta := 8 x arctan (l)/n;
p:= cos (theta); q := sin (theta);
x[0]:=x[n]:=l;y[0]:=y[n]:=0;
x [1] := x [n — 1] := p; y [1] := q; y [n — 1] :== — q;
for i := 2 step 1 until n/2 do
begin
if n = 4 x i then
begin
x[i] := x[3xi] := 0;
y[i]:= l;y[3xi]:= — 1
end else
if n = 2 x i then
begin
xp]:=-l;y[i]:=-0end else
beginx [i] := x [n — i] := p x x [i — 1] — q x y [i — 1];
y H := (y [i — 1] + q x x [i]) / p; y [n — i] := — y [i]end
end i;
Coefficients:
for k := 0 step 1 until n/2 do
beginsi := s2 := 0;
for i : = 0 step 1 until n — 1 do
begin
j := i x k — entier (i x k/n) x n;
si := si +gl[i] X x[j];s2:= s2 + g2[i] x y [j]
end i;
if k = 0 then xi [0] : = s 1 / n else
if n = 2 x k then xi [k] : = s 1 / (n x r f k) else
62

begin
xi[k]:= (si —s2)/(n x rfk);
xi[n —k] := (si + s2)/(n x r t (n — k))end
end k;
Laguerre:
for t := tO step delta until tl do
begin
/0:=0;/l:=exp((d — I) x t);
m:= — l;f := xi[0] x /l;
for k : = 1 step 1 until n — 1 do
begin72 := ((2 x (k — / x t) — 1) x /l — (k — 1) x 10) / k;
f := f + sign (m) x xi [k] x 12;
m:= — m;/0 := 11; l\ := /2
end k;
Inform (t, f);end Laguerre
end Lapinversion
References
1. Chestnut, H., R. W. Mayer: Servomechanisms and Regulating System Design. Volume 1,
1951.
2. Courant, R., D. Hilbert: Methods of Mathematical Physics. Volume 1, 1953.
3. Doetsch, G.: Handbuch der Laplace-Transformation. 1950.
4. Doetsch, G.: Tabellen zur Laplace-Transformation und Anleitung zum Gebrauch. 1947.
5. Doetsch, G.: Einfuhrung in Theorie und Anwendung der Laplace-Transformation. 1958.
6. Jahnke-Emde-Losch: Tafeln hoherer Funktionen. 1960.
7. Kaczmarz, St., H. Steinhaus: Theorie der Orthogonalreihen. 1935.
8. Lanczos, C: Applied Analysis. 1957.
9. Stiefel, E.: Einfuhrung in die numerische Mathematik. 1961.
10. Szego, G.: Orthogonal Polynomials. 1939.
11. Szego, G.: Ein Beitrag zur Theorie der Polynome von Laguerre und Jacobi. Mathema-
tische Zeitschrift, Band 1 (1918), S. 343-356.
63

Zusammenfassung
Die vorliegende Arbeit behandelt die numerische Riicktransformation einer
auf der imaginaren Achse und in der Halbebene rechts davon analytischen
Laplace-Transformierten. Diese Aufgabe tritt auf bei den praktischen Pro-
blemen der Elektro- und Regelungstechnik, wo der Frequenzgang experimentell
gemessen werden kann. Diese Methode verlangt nur die numerischen Werte
des Frequenzganges fur gewisse Frequenzen.
In Kapitel III ist ein Verfahren fur den Fall entwickelt, wo die Lage (und nur
die Lage) der dominanten Pole bekannt ist. Hier sind wir in der Lage, zugleichden asymptotischen Teil der Zeitfunktion zu gewinnen.
Kapitel IV illustriert die Losungsmethode bei einem praktischen Problem der
Regelungstechnik.
Die Anwendung dieser Methode auf die eindimensionale Warmeleitung ist
in Kapitel V behandelt.
CURRICULUM VITAE
I was born in Alexandria (Egypt) on the 8th of december 1932. There I
visited the primary school for four years and the secondary school for five years.
Afterwards I joined the Faculty of Engineering of the University of Alexandria
and obtained the degree B. Sc. in Electrical Engineering in June 1955. Duringthe following three years I worked as an assistant at the same faculty for the
Department of Mathematics and Physics. In November 1958 I was sent to
Switzerland by the Egyptian government for graduate studies in applied ma¬
thematics. In April 19591 enrolled at the Swiss Federal Institute of Technologyin Zurich (fourth semester - Department of Mathematics and Physics). In
Spring 1962 I obtained the Diploma in Mathematics. Since July 1962 I have
been developing the theory for this thesis at the Institute of Applied Mathe¬
matics using its electronic computer ERMETH for the numerical investigations.
64