international journal of advance engineering and...
TRANSCRIPT

International Journal of Advance Engineering and Research Development
Volume 5, Issue 04, April -2018
@IJAERD-2018, All rights Reserved 321
Scientific Journal of Impact Factor (SJIF): 5.71 e-ISSN (O): 2348-4470 p-ISSN (P): 2348-6406
INCREASING THE SAFETY OF BOMB DISPOSAL USING ZIGBEE
TECHNOLOGY
R.Odaiah1, T.S.Santosh kumar
2,p.Srujana Devi
3 ,D.Dhamodar Reddy
4
1Associate Professor, Electronics and Communication Engineering, Geethanjali College of Engineering and Technology
2Student, Electronics and Communication Engineering, Geethanjali College of Engineering and Technology
3Student, Electronics and Communication Engineering, Geethanjali College of Engineering and Technology
4Student, Electronics and Communication Engineering, Geethanjali College of Engineering and Technology
Abstract — The main goal of the project is to provide safety to the bomb disposal squad by providing an extra line of
defense.Provide a remote monitoring and controlling application for analysis of a suspicious packet (or bomb). Allow the
user to manipulate the packet using the robotic arm. To provide visual feedback from the site of the packet.To provide a
very user-friendly control application The Wireless Bomb Disposal Robot uses a control application, at the user end to
control the robot remotely using Wireless technology.
Keywords—Zigbee, Robotic arm, Metal detector, Temperature
I. INTRODUCTION
The project has been designed keeping in view the current law and order situation in India and throughout the
world. Everyday hundreds of trained personnel are either injured or lose their lives while defusing bombs. The main idea
of this robot is to provide the bomb disposal squad with safety and security from the risks that they face every day. Our
robot provides an extra layer of protection to the bomb disposal squad by allowing them to check and analyze a
suspicious packet before actually approaching it for disposal. A robot takes risk out of potentially deadly scenarios and
lets the bomb technician focus on what to do to an explosive device rather than on the immediate danger to life and limb.
The Wireless Bomb Disposal Robot uses a control application, at the user end to control the robot remotely using
Wireless technology. The bomb technician controls the robot using this application. The Wireless Bomb Disposal Robot
uses a control application, at the user end to control the robot remotely using Wireless technology. The bomb technician
controls the robot using this application. Input from the user is transmitted serially over an Zigbee to the Robot, where it
is received, identified and relayed to the appropriate module.
II. LITERATURE SURVEY
Industrial robots can easily automate picking a part up and placing it into a new location. Pick and place robots not only
speed up the process, which increases production rates, but they are also more accurate and do not fatigue. Most of the
movements that pick and place robots perform are back-breaking are hard to maneuver for humans.
The consistent output of a robotic system along with quality and repeatability are unmatched. Pick and place robots can
be reprogrammable and tooling can be interchanged to provide for multiple applications.
There are long term savings associated with a pick and place robotic work cell. An increase in output with a material
handling robotic system has saved factories money. With the advancements in technology and affordability of robots,
more pick and place robotic cells are being installed for automation applications.
In this highly developing society; time and man power are critical constrains for completion of task in large scales. the
automation is playing important role to save human efforts in most of the regular and frequently carried works e.g. most
of the industrial jobs like welding, painting, assembly, container filling etc. One of the major and most commonly
performed work is picking and placing of jobs from source to destination. For this purpose, ‘pick and place robot ‘maybe
used.
The pick and place robot is a microcontroller based mechatronic system that detects the object, picks that object from
source location and places at desired location. For detection of object, infrared sensors are used which detect presence of
object as the transmitter to receiver path for infrared sensor is interrupted by placed object. gantry and finally place it on
destination. If another object causes interrupt, it again does the same job. Whole process is controlled by micro controller
As soon as robot senses presence of object, it moves towards object, picks it with end effectors, and moves along way.
But here in our project work for detecting the object infrared sensors are not used, and in fact the objects are picked and
placed through remote control mechanism depending on the keys (push buttons) are pressed the robot is controlled
through wireless communication technology zigbee.
International Journal of Advance Engineering and Research Development (IJAERD)
Volume 5, Issue 04, April-2018, e-ISSN: 2348 - 4470, print-ISSN: 2348-6406
@IJAERD-2018, All rights Reserved 322
In manufacturing industry and nuclear industry, a large fraction of the work is repetitive and judicious application of
automation will most certainly result in optimum utilization of machine and manpower. A pneumatic `Pick and Place'
Robot has been developed to achieve automation in applications where great sophistication is not needed and simple
tasks like picking up of small parts at one location and placing them at another
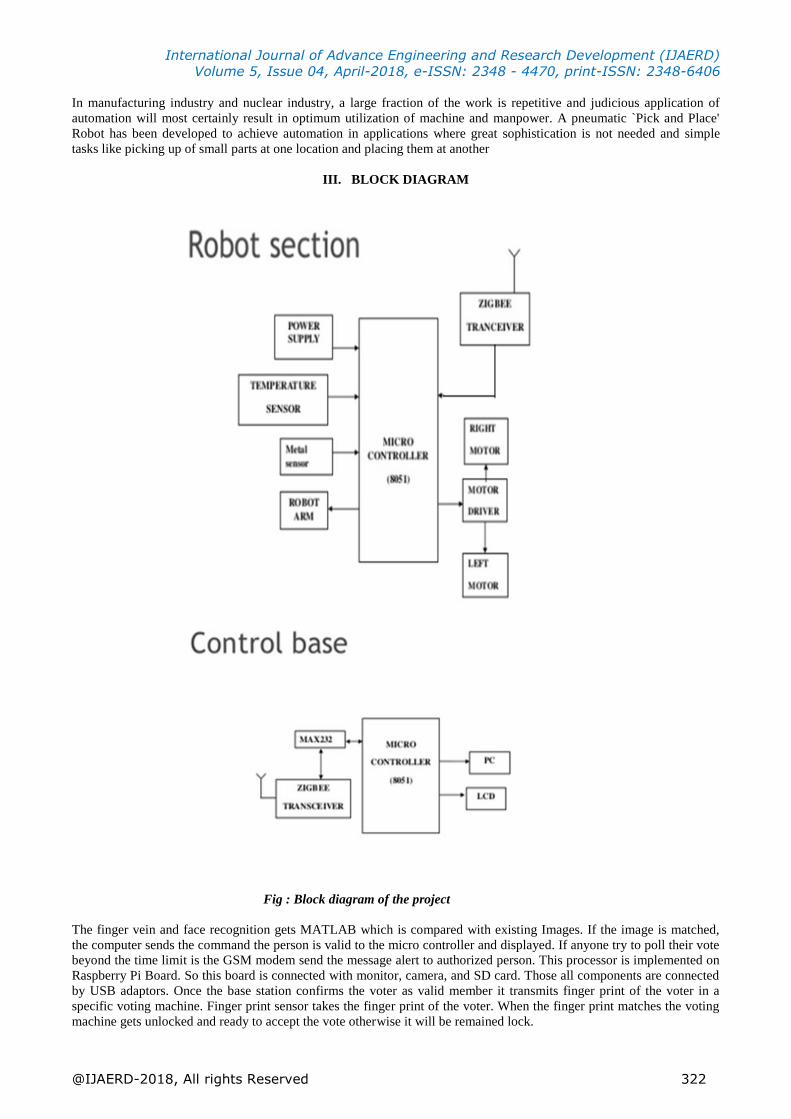
III. BLOCK DIAGRAM
Fig : Block diagram of the project
The finger vein and face recognition gets MATLAB which is compared with existing Images. If the image is matched,
the computer sends the command the person is valid to the micro controller and displayed. If anyone try to poll their vote
beyond the time limit is the GSM modem send the message alert to authorized person. This processor is implemented on
Raspberry Pi Board. So this board is connected with monitor, camera, and SD card. Those all components are connected
by USB adaptors. Once the base station confirms the voter as valid member it transmits finger print of the voter in a
specific voting machine. Finger print sensor takes the finger print of the voter. When the finger print matches the voting
machine gets unlocked and ready to accept the vote otherwise it will be remained lock.
International Journal of Advance Engineering and Research Development (IJAERD)
Volume 5, Issue 04, April-2018, e-ISSN: 2348 - 4470, print-ISSN: 2348-6406
@IJAERD-2018, All rights Reserved 323
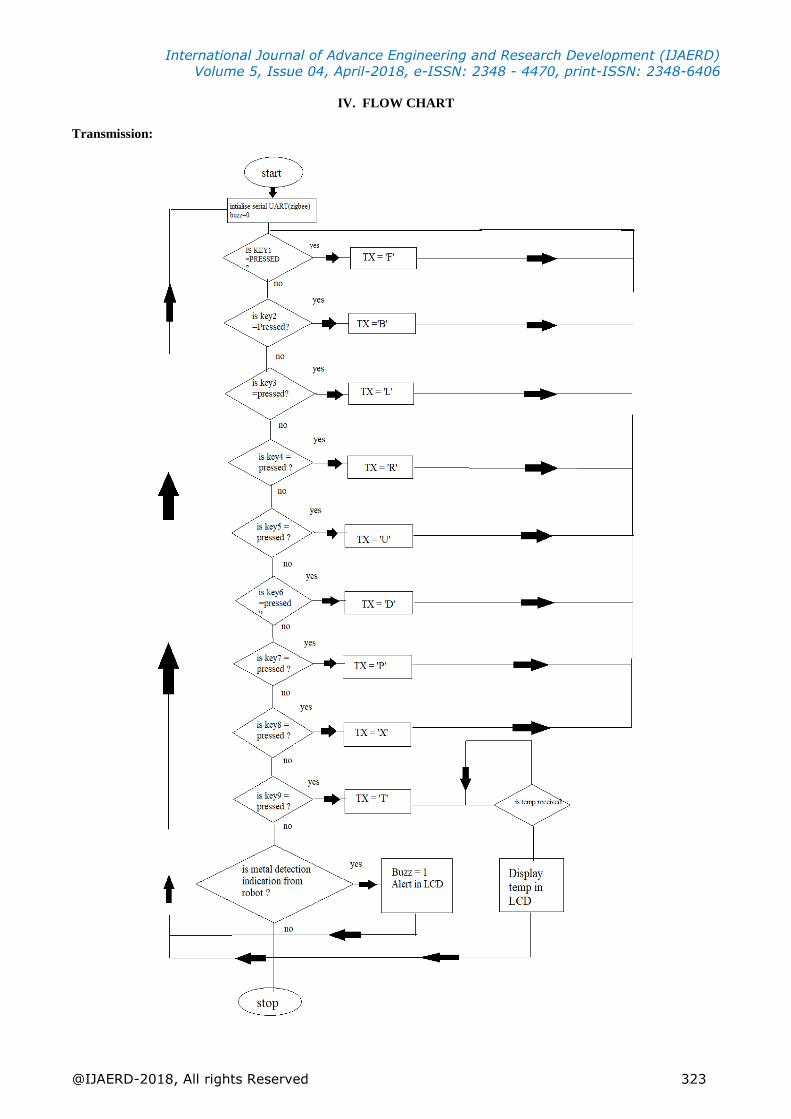
IV. FLOW CHART
Transmission:
International Journal of Advance Engineering and Research Development (IJAERD)
Volume 5, Issue 04, April-2018, e-ISSN: 2348 - 4470, print-ISSN: 2348-6406
@IJAERD-2018, All rights Reserved 324
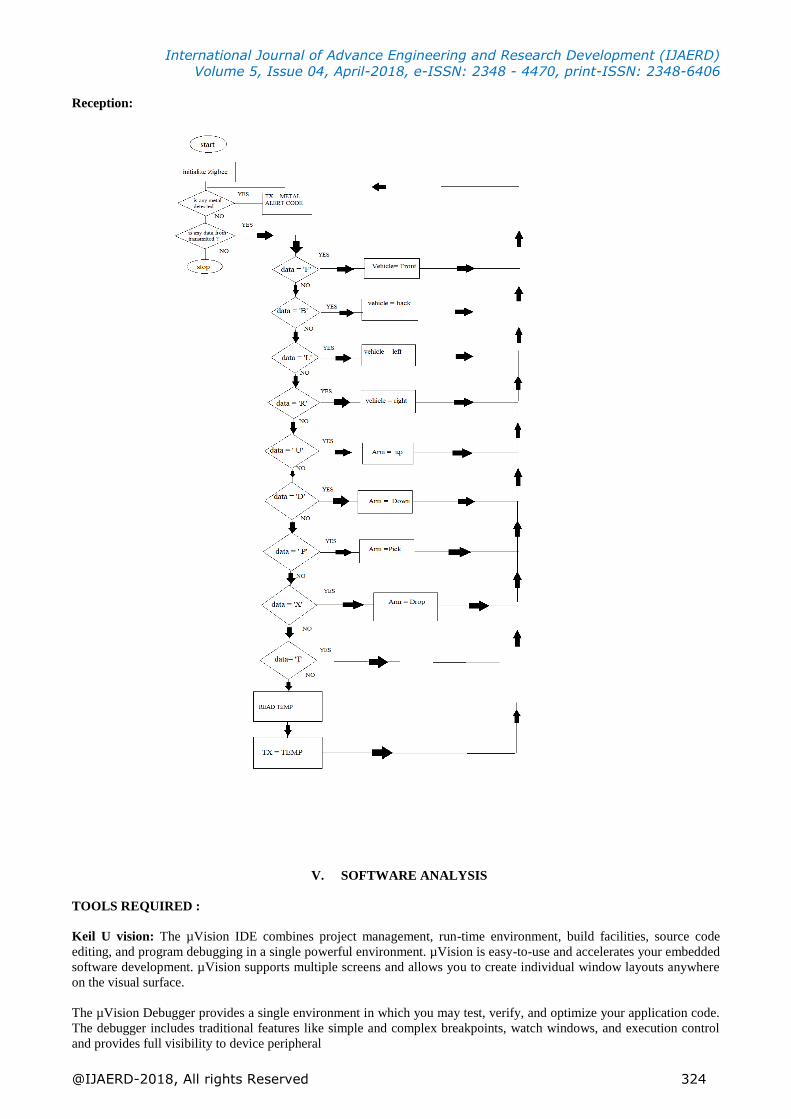
Reception:
V. SOFTWARE ANALYSIS
TOOLS REQUIRED :
Keil U vision: The µVision IDE combines project management, run-time environment, build facilities, source code
editing, and program debugging in a single powerful environment. µVision is easy-to-use and accelerates your embedded
software development. µVision supports multiple screens and allows you to create individual window layouts anywhere
on the visual surface.
The µVision Debugger provides a single environment in which you may test, verify, and optimize your application code.
The debugger includes traditional features like simple and complex breakpoints, watch windows, and execution control
and provides full visibility to device peripheral
International Journal of Advance Engineering and Research Development (IJAERD)
Volume 5, Issue 04, April-2018, e-ISSN: 2348 - 4470, print-ISSN: 2348-6406
@IJAERD-2018, All rights Reserved 325
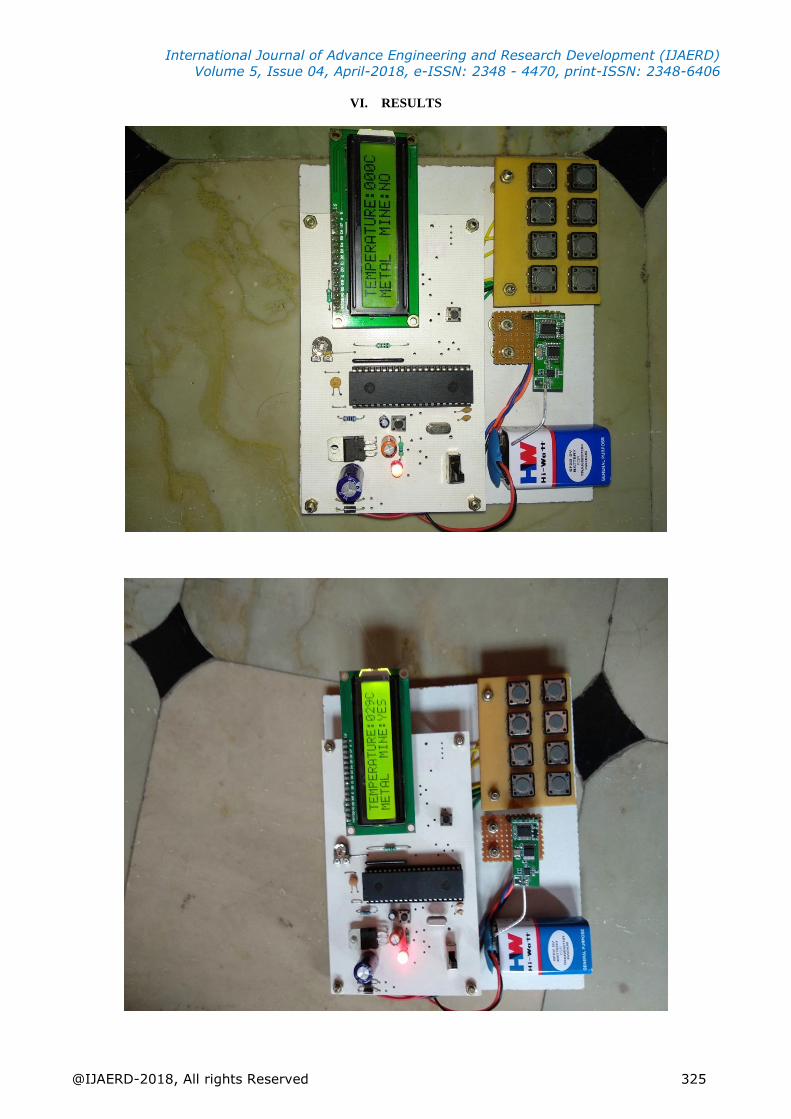
VI. RESULTS

International Journal of Advance Engineering and Research Development (IJAERD)
Volume 5, Issue 04, April-2018, e-ISSN: 2348 - 4470, print-ISSN: 2348-6406
@IJAERD-2018, All rights Reserved 326
VI. CONCLUSION AND FUTURE SCOPE
The robot is designed to move by our command and also by it own according to the command given by the
program. The video and audio are monitored at the control unit. In this prototype project, we design in such a
way that this robot can be moved anywhere and it can get the information of particular place. It is easy to detect
any faults or dangerous in the industry. It leads easy process without interaction of human. This project is very
much useful in the places where a human cannot go into the places like ground canals, smoke oriented caves and
this project is very much useful in such situations.For night mode or place where light is low a night vision
camera can be mounted o the robot instead of a standard camera,which will increase the visibility in case of no
light at all. Step climbing mechanism : it is used for using the staircase which help the user to move from one
floor to other floor. Wireless video transmission : it is used to keep the user away from the bomb site and control
it from a safe distance. Vision sensing technique : the camera is mounted above the robot and is able to pan and
tilt. Its image is displayed on a screen so that users can select a feature with a pointing device and detect it.

International Journal of Advance Engineering and Research Development (IJAERD)
Volume 5, Issue 04, April-2018, e-ISSN: 2348 - 4470, print-ISSN: 2348-6406
@IJAERD-2018, All rights Reserved 327
REFERENCES
ADVANCED EMBEDDED WIRELESS ROBOT WITH MOTION DETECTION SYSTEM AND LIVE VIDEO /
AUDIO TRANSMISSION by MA.WAJEED, K. VARUN KUMAR - International Journal of Communication Network
Security, ISSN: 2231 – 1882, Volume-2, Issue-2, 2013. (base paper).
Mobile Robot in Coal Mine Disaster Surveillance by Mr. Sabarish Chakkath , S.Hariharansiddharath , B.Hemalatha -
IOSR Journal of Engineering (IOSRJEN) e-ISSN: 2250-3021, p-ISSN: 2278-8719, www.iosrjen.org Volume 2, Issue 10
(October 2012), PP 77-82.
Wireless Surveillance Robot with Motion Detection and Live Video Transmission by A.Sivasoundari, S.Kalaimani,
M.Balamurugan -International Journal of Emerging Science and Engineering (IJESE) ISSN: 2319– 6378, Volume-I,
Issue-6 April 2013.
Design and Automation of Security Management System for Industries Based On M2M Technology by Swathi
Bhupatiraju, J V Subrahmanyeswara Rao -International Journal of Computer Engineering Science (IJCES) Volume 2
Issue 3 (March 2012) ISSN : 2250:3439.
AUTOMATED ADVANCED INDUSTRIAL and HOME SECURITY USING GSM and FPGA by
N.Chinthaih,K.Rajshekar - International Journal of Computer Science and Information Technologies, Vol. 2 (4) , 2011,
1598-1602.
.Develop a Multiple Interface Based Fire Fighting Robot by Ting L. Chien , Kuo Lan Su and Sheng Ven Shiau - IEEE
International Conference on Robotics and Automation,, vol.3, pp.2084-2086.