ioamodif_
DESCRIPTION
ioaTRANSCRIPT

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
CUPRINS PREFAŢĂ.........................................................................................................................9
1 GENERALITĂŢI PRIVIND ÎNCERCAREA AUTOVEHICULELOR........................ 11
1.1 Principalele etape din dezvoltarea unui autovehicul................................................................................11
1.2 Încercări experimentale, importanţă, scop, clasificare, cerinţe...............................................................12
1.3 Pregătirea încercării autovehiculelor ........................................................................................................18 1.3.1 Întocmirea programului de încercări ........................................................................................................18 1.3.2 Alegerea, recepţia şi pregătirea autovehiculelor pentru încercări.............................................................20 1.3.3 Alegerea şi pregătirea aparaturii de măsurare...........................................................................................22 1.3.4 Alegerea şi pregătirea traseelor de măsurare ............................................................................................23
2 MĂSURAREA PE CALE ELECTRICĂ A MĂRIMILOR NEELECTRICE .............. 27
2.1 Generalităţi privind lanţul de măsurare ...................................................................................................27
2.2 Traductoare .................................................................................................................................................28 2.2.1 Rolul şi clasificarea traductoarelor ...........................................................................................................28 2.2.2 Caracteristicile principale ale traductoarelor ............................................................................................30 2.2.3 Traductoarele de inducţie .........................................................................................................................35 2.2.4 Traductoare inductive ...............................................................................................................................39 2.2.5 Traductoare potenţiometrice.....................................................................................................................45 2.2.6 Traductoare de impulsuri..........................................................................................................................47 2.2.7 Traductoare piezoelectrice........................................................................................................................50 2.2.8 Traductoare tensometrice rezistive ...........................................................................................................57 2.2.9 Traductoare tensometrice cu semiconductoare.........................................................................................62 2.2.10 Traductoare capacitive.........................................................................................................................64
2.3 Aparate utilizate în lanţul de măsurare.....................................................................................................67 2.3.1 Filtrele ......................................................................................................................................................67 2.3.2 Amplificatoare de măsură.........................................................................................................................69 2.3.3 Multiplexoare ...........................................................................................................................................73 2.3.4 Circuite de eşantionare şi numărare..........................................................................................................73 2.3.5 Conversia analog-numerică ......................................................................................................................74 2.3.6 Aparate de vizualizare şi înregistrare a semnalelor măsurate ...................................................................75 2.3.7 Colectoare pentru transmiterea semnalelor de moment de la arborii rotitori............................................79
2.4 Măsurarea asistată de calculator ...............................................................................................................81 2.4.1 Structura echipamentelor pentru măsurare asistată...................................................................................81 2.4.2 Achiziţia de date .......................................................................................................................................83 2.4.3 Funcţii fundamentale ale sistemelor de achiziţie ......................................................................................84

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
4
2.4.4 Condiţii impuse de procesul de măsurare .................................................................................................84
3 ÎNCERCAREA ŞI OMOLOGAREA ANSAMBLURILOR AUTOVEHICULULUI.... 87
3.1 Încercarea şi omologarea motorului..........................................................................................................87 3.1.1 Noţiuni generale privind încercarea motoarelor .......................................................................................87 3.1.2 Frâne pentru încercarea motoarelor ..........................................................................................................88 3.1.3 Măsurarea debitului de aer .......................................................................................................................94 3.1.4 Măsurarea consumului de combustibil .....................................................................................................98 3.1.5 Măsurarea temperaturilor şi a presiunilor...............................................................................................103 3.1.6 Echiparea unui stand de încercări motoare .............................................................................................104
3.2 Încercarea şi omologarea transmisiei ......................................................................................................105 3.2.1 Noţiuni generale privind încercarea transmisiei .....................................................................................105 3.2.2 Incercarea ambreiajului ..........................................................................................................................108 3.2.3 Încercarea cutiei de viteze ......................................................................................................................111 3.2.4 Încercarea transmisiiolor cardanice ........................................................................................................118 3.2.5 Încercarea punţilor motoare....................................................................................................................120 3.2.6 Încercarea transmisiei în ansamblu.........................................................................................................126 3.2.7 Posibilităţi de automatizare a regimurilor de încărcare ..........................................................................129
3.3 Încercarea şi omologarea suspensiei ........................................................................................................131 3.3.1 Generalităţi, metode de încercare ...........................................................................................................131 3.3.2 Încercarea elementelor elastice ale suspensiei........................................................................................132 3.3.3 Încercarea amortizoarelor .......................................................................................................................134 3.3.4 Încercarea suspensiei în ansamblu..........................................................................................................136
3.4 Încercarea şi omologarea sistemului de direcţie .....................................................................................139 3.4.1 Generalităţi, metode de încercare ...........................................................................................................139 3.4.2 Încercarea pe stand a capetelor de bară ..................................................................................................139 3.4.3 Încercarea pe stand a mecanismului de direcţie......................................................................................140 3.4.4 Încercarea pe stand a sistemului de direcţie............................................................................................141
4 DETERMINAREA PARAMETRILOR CONSTRUCTIVI ŞI DE MASĂ AI AUTOVEHICULELOR ................................................................................................ 144
4.1 Determinarea parametrilor constructivi .................................................................................................144 4.1.1 Determinarea dimensiunilor exterioare ale autovehiculelor ...................................................................145 4.1.2 Determinarea dimensiunilor interioare ale caroseriei autovehiculului ...................................................147
4.2 Determinarea caracteristicilor de masă ale autovehiculului .................................................................149 4.2.1 Determinarea masei şi repartiţia acesteia................................................................................................149 4.2.2 Determinarea poziţiei centrului de masă ................................................................................................150
5 DETERMINAREA PE CALE EXPERIMENTALĂ A PARAMETRILOR DINAMICI ŞI ECONOMICI AI AUTOVEHICULELOR ...................................................................... 153
5.1 Determinarea vitezelor autovehiculului ..................................................................................................153 5.1.1 Determinarea vitezei maxime .................................................................................................................153 5.1.2 Determinarea vitezei minime..................................................................................................................154 5.1.3 Determinarea vitezei medii.....................................................................................................................155
5.2 Determinarea parametrilor de accelerare şi de frânare ........................................................................156

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
5
5.2.1 Determinarea parametrilor de accelerare................................................................................................156 5.2.2 Determinarea parametrilor de frânare.....................................................................................................158
5.3 Detreminarea rezistenţelor la înaintare prin rulare liberă....................................................................164 5.3.1 Determinarea coeficientului de rezistenţă la rulare ................................................................................164 5.3.2 Determinarea coeficientului de formă ....................................................................................................165
5.4 Detreminarea consumului de combustibil...............................................................................................166 5.4.1 Parametrii de apreciere a consumului de combustibil ............................................................................167 5.4.2 Aparate folosite pentru măsurarea consumului de combustibil ..............................................................168 5.4.3 Determinarea consumului de combustibil în regim uniform ..................................................................170 5.4.4 Determinarea consumului mediu de combustibil ...................................................................................173 5.4.5 Determinarea consumului de combustibil în regim variabil ...................................................................174
5.5 Detreminarea forţei de tracţiune .............................................................................................................177 5.5.1 Determinarea forţei de tracţiune pe standuri cu rulouri ..........................................................................178 5.5.2 Determinarea forţei de tracţiune cu ajutorul carului de frânare ..............................................................181 5.5.3 Determinarea experimentală a caracteristicii de tracţiune ......................................................................185 5.5.4 Determinarea rezistenţelor la înaintare prin metoda remorcării .............................................................188
6 DETERMINAREA PARAMERTILOR DE MANIABILITATE ŞI STABILITATE AI AUTOVEHICULELOR ................................................................................................ 190
6.1 Determinarea parametrilor de maniabilitate ai autovehiculelor ..........................................................192 6.1.1 Determinarea razelor de viraj .................................................................................................................192 6.1.2 Determinarea unghiurilor de montaj ale roţilor de direcţie.....................................................................193 6.1.3 Determinarea unghiurilor maxime de bracare a roţilor de direcţie şi a raportului de transmitere unghiular al sistemului de direcţie ........................................................................................................................................194 6.1.4 Determinarea efortului la volan ..............................................................................................................195 6.1.5 Determinarea maniabilităţii la mersul rectiliniu .....................................................................................196 6.1.6 Determinarea maniabilităţii la trecerea de pe o bandă pe alta a drumului şi la intrarea în curbă............198 6.1.7 Determinarea maniabilităţii la deplasarea autovehiculului pe o traiectorie în formă de “S” ..................200 6.1.8 Determinarea capacităţii de virare dinamică a autovehiculului ..............................................................202 6.1.9 Determinarea capacităţii de virare statică a autovehiculului ..................................................................203
6.2 Determinarea parametrilor stabilităţii autovehiculului.........................................................................204 6.2.1 Determinarea stabilităţii longitudinale....................................................................................................205 6.2.2 Determinarea stabilităţii transversale......................................................................................................205
7 DETERMINAREA PE CALE EXPERIMENTALĂ A FIABILITĂŢII AUTOVEHICULELOR ................................................................................................ 208
7.1 Estimarea pe cale experimentală a indicatorilor de fiabilitate..............................................................208 7.1.1 Determinarea valorilor teoretice ale indicatorilor de fiabilitate..............................................................208 7.1.2 Estimarea punctuală a indicatorilor de fiabilitate prin metode neparametrice........................................210 7.1.3 Estimarea valorilor indicatorilor de fiabilitate prin metode parametrice ................................................212
7.2 Organizarea cercetărilor experimentale pentru evaluarea indicatorilor de fiabilitate.......................219 7.2.1 Achiziţia datelor primare pentru evaluarea indicatorilor de fiabilitate ...................................................222 7.2.2 Determinarea modelului repartiţiei teoretice pentru indicatorii de fiabilitate.........................................223
7.3 Criterii pentru întocmirea programelor de încercare la fiabilitate ......................................................224

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
6
8 ÎNCERCAREA AUTOVEHICULEOR ÎN CONDIŢII GRELE ................................ 225
8.1 Încercarea funcţionării îndelungate a autovehiculelor în regim de putere maximă ...........................225
8.2 Încercarea funcţionării autovehiculului în condiţii de temperatură scăzută a mediului ambiant .....226
8.3 Încercarea funcţionării autovehiculelor în condiţii de temperatură ridicată a mediului ambiant ....227
8.4 Încercarea comportării autovehiculelor în zone montane de mare altitudine .....................................229
9 ÎNCERCĂRI PRIVIND SIGURANŢA PASIVĂ A AUTOVEHICULELOR............. 233
9.1 Generalităţi ................................................................................................................................................233
9.2 Manechine antropometrice.......................................................................................................................235
9.3 Verificarea rezistenţei structurii autovehiculului...................................................................................239 9.3.1 Condiţii tehnice impuse autovehiculelor în cazul coliziunilor frontale ..................................................239 9.3.2 Comportarea structurii autovehiculului şi protecţia ocupanţilor în situaţia coliziunii laterale ...............240
9.4 Încercări de coliziune ale cabinelor utilitare efectuate prin metoda pendulului .................................241 9.4.1 Încercarea la impact frontal (încercarea A) ............................................................................................241 9.4.2 Rezistenţa acoperişului (încercarea B) ...................................................................................................241 9.4.3 Rezistenţa peretelui din spate (încercarea C)..........................................................................................242
9.5 Prescripţii privind fixarea autovehiculelor pe bancul de încercări.......................................................242
9.6 Metode de determinare a punctului ‘H’ şi a unghiului real de înclinare a spătarului şi verificarea relaţiilor cu punctul ‘R’ pentru înclinarea spătarului..........................................................................................243
9.6.1 Determinarea punctelor ‘H’ şi a unghiurilor reale de înclinare a spătarelor...........................................244
9.7 Caracteristicile manechinelor utilizate pentru determinarea punctelor ‘R’ şi ‘H’ .............................244 9.7.1 Poziţia manechinului ..............................................................................................................................244
9.8 Scenarii de încercare şi aparatura de măsurare privind siguranţa pasivă exterioară ........................247 9.8.1 Poziţia manechinului ..............................................................................................................................248 9.8.2 Pregătirea autoturismului........................................................................................................................249 9.8.3 Instalaţia de tracţiune pentru autovehiculele supuse coliziunilor ...........................................................249 9.8.4 Filmarea rapidă şi sisteme speciale de iluminare....................................................................................250 9.8.5 Măsurarea vitezei autoturismului ...........................................................................................................252 9.8.6 Instalaţia de achiziţie de date la coliziune ..............................................................................................252
9.9 Desfăşurarea testelor şi analiza rezultatelor ...........................................................................................254 9.9.1 Contactul cu autoturismul.......................................................................................................................255 9.9.2 Faza de zbor............................................................................................................................................257 9.9.3 Faza de târâre..........................................................................................................................................257
9.10 Concluzii.....................................................................................................................................................257
10 PRELUCRAREA ŞI INTERPRETAREA REZULTATELOR ÎNCERCĂRILOR 263
10.1 Generalităţi ................................................................................................................................................263

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
7
10.2 Precizia şi erorile de măsurare.................................................................................................................263 10.2.1 Clasificarea erorilor de măsurare .......................................................................................................264
10.3 Noţiuni de teoria probabilităţii.................................................................................................................266
10.4 Prelucrarea statistică a datelor experimentale .......................................................................................269 10.4.1 Media aritmetică ................................................................................................................................269 10.4.2 Media ponderată ................................................................................................................................269 10.4.3 Mediana .............................................................................................................................................270 10.4.4 Moda..................................................................................................................................................270 10.4.5 Probabilitatea şi intervalul de încredere.............................................................................................270 10.4.6 Abaterea medie pătratică ...................................................................................................................270
10.5 Calculul erorilor compuse ........................................................................................................................272 10.5.1 Calculul erororilor în cazul compunerii prin însumare ......................................................................272 10.5.2 Calculul erororilor în cazul compunerii prin combinaţii liniare.........................................................273 10.5.3 Calculul erororilor în cazul compunerii prin înmulţire ......................................................................273 10.5.4 Calculul erororilor în cazul compunerii prin sumă de puteri .............................................................274 10.5.5 Calculul erororilor în cazul compunerii prin produs de puteri...........................................................274 10.5.6 Calculul erororilor în cazul funcţiilor logaritmice .............................................................................275 10.5.7 Calculul erororilor în cazul funcţiilor de mai multe variabile............................................................275
11 NORME ŞI REGLEMENTĂRI INTERNE ŞI INTERNAŢIONALE UTILIZATE LA OMOLOGAREA AUTOVEHICULELOR..................................................................... 277
11.1 Prescurtări şi definirea unor termeni utilizati ........................................................................................277
11.2 Obiectul şi domeniul de aplicare al reglementărilor privind omologarea autovehiculelor.................279
11.3 Proceduri de aplicare a reglementărilor privind omologarea autovehiculelor în România ...............279
11.4 Reglementări care se aplică la omologarea de tip, a autovehiculelor şi remorcilor ............................281 BIBLIOGRAFIE.............................................................................................................

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
8

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
9
PREFAŢĂ În condiţiile actuale s-a impus necesitatea scurtării timpului de dezvoltare a unui
autovehicul nou, precum satisfacerea de către acesta a tuturor cerinţelor impuse de beneficiar în ceea ce priveşte performanţele dinamice şi economice, fiabilitatea, confortul, siguranţa în exploatare şi preţul de cost.
Pornind de la aceste considerente lucrarea de faţă îşi propune să abordeze cunoştinţele de bază privind principiile şi tehnica de măsurare a mărimilor specifice cercetării experimentale a autovehiculelor, metodele de investigare experimentală, eveluarea erorilor şi prelucrarea datelor experimentale.
Lucrarea este structurată pe unsprezece capitole, autorii aducându-şi contribuţia după cum urmează: CÂMPIAN Ovidiu capitolele 1, 2, 3, 4, 5, 6, 7, 8, 10,11; ŞOICA Adrian capitolul 9.
În capitolul 1 sunt prezentate importanţa, scopul şi principalele cerinţe impuse faţă de cercetarea experimentală. De asemenea sunt prezentate aspecte generale privind pregătirile care trebuie efectuate pentru încercarea autovehiculelor.
Capitolul 2 cuprinde informaţii privind lanţurile de măsurare utilizate la încercarea autovehiculelor, fiind tratate detaliat toate componentele lanţului de măsurare.
Capitolul 3 tratează problemele legate de încercarea în condiţii de laborator a principalelor ansambluri ale autovehiculelor: motor, transmisie, suspensie, sistem de direcţie, sistem de frânare. De asemenea sunt prezentate principalele standuri specializate în încercarea acestor ansambluri, traductoarele specifice utilizate, precum şi modalităţile de desfăşurare a încercărilor în condiţii de laborator.
În capitolul 4 se face o prezentare detaliată a parametrilor dimensionali şi de masă ai autovehiculelor şi a modalităţilor de determinare pe cale experimentală a acestora.
În capitolul 5 sunt prezentate posibilităţile de determinare pe cale experimentală prin încercări de drum şi de laborator a principalilor parametrii de apreciere a performanţelor autovehiculelor.
Capitolul 6 tratează problemele legate de aprecierea maniabilităţii şi stabilităţii autovehiculelor.
Capitolul 7 dezvoltă modalităţile de stabilire pe cale experimentală a parametrilor de apreciere a fiabilităţii.
În capitolul 8 este prezentată modalitatea de încercare a autovehiculelor şi a subansamblurilor acestora în condiţii grele de exploatare: climat tropical, climat polar, altitudine ridicată, etc.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
10
Capitolul 9 abordează atât aspecte legate de siguranţa pasivă interioară cât şi de cea experioară.
În capitolul 10 sunt prezentate modalităţile de estimare a erorilor rezultate în urma măsurătorilor şi principalele modalităţi de prelucrare a datelor obţinute prin încercări.
În capitolul 11 sunt prezentate principalele norme şi reglementări interne şi internaţionale utilizate la omelogarea autovehiculelor şi a subansamblurilor acestora.
La elaborarea prezentei lucrări a fost respectată programa analitică a cursului “Încercarea şi omologarea autovehiculelor” predat studenţilor care se pregătesc în specializarea autovehicule rutiere. Prin conţinut şi mod de tratare lucrarea este utilă şi specialiştilor care activează în domeniul concepţiei încercării şi exploatării autovehiculelor.
Autorii,

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
11
1 GENERALITĂŢI PRIVIND ÎNCERCAREA AUTOVEHICULELOR Evoluţia autovehiculelor începând cu primul autovehicul construit în anul 1769 de
inginerul militar francez Nicholas Jseph Cugnot, până la cele mai moderne modele actuale este foarte spectaculoasă. Secolul XX a însemnat pentru industria de autovehicule trecerea la producţia de masă, de la începutul acestui secol fiind produse peste un bilion de automobile. Autovehiculul a devenit parte integrantă a stilului modern de viaţă, el fiind principalul mijloc de realizare a mobilităţii.
Dezvoltarea rapidă a industriei constructoare de autovehicule din ultimele patru decenii a generat o criză de supraproducţie şi mutaţii importante în ceea ce priveşte nivelul producţiei şi repartiţia acesteia pe piaţă. Perioada actuală este caracterizată printr-o concurenţă acerbă pe piaţa autovehiculelor, care a generat schimbări importante în cadrul procesului de dezvoltare a unui autovehicul nou. Tendinţa actuală vizează menţinerea pieţelor existente şi câştigarea altora noi, prin producerea de autovehicule cu caracteristici dinamice, economice, ergonomice, funcţionale şi de siguranţă ridicate cu nivel de poluare chimică şi fonică redus şi preţ de cost cât mai mic.
Pe piaţă rămân competitivi doar constructorii care au centre de proiectare, de cercetare, de producţie şi de service puternice şi sunt capabili să se adapteze foarte rapid cerinţelor impuse de beneficiari. Perioada actuală este caracterizată printr-o continuă creştere a complexităţii procesului de dezvoltare a unui autovehicul nou ca urmare a cerinţelor impuse de mediul social şi natural şi datorită nivelului ridicat de calitate cerut de consumatori. Calitatea, în sensul ISO 9000 este totalitatea proprietăţilor şi caracteristicilor unui produs sau serviciu care poartă în ele capacitatea de a satisface cerinţele declarate sau implicite, ea constituind baza aprecierii tehnice şi economice.
Pentru realizarea dezideratului menţionat mai sus proiectanţii, cercetătorii şi producătorii de autovehicule îşi unesc forţele progresul industriei constructoare de autovehicule fiind asigurat prin întărirea tuturor compartimentelor care participă la dezvoltarea autovehiculelor noi.
1.1 Principalele etape din dezvoltarea unui autovehicul
Lansarea în producţie a unui autovehicul nou presupune parcurgerea următoarelor etape:
faza de proiectare; faza încercărilor experimentale; faza de producţie; perioada de serviciu. Trebuie subliniat faptul că aceste patru faze nu sunt independente, ci se află în
strânsă interdependenţă pe tot parcursul procesului de dezvoltare a unui autovehicul nou. De exemplu, defecte apărute cu frecvenţă ridicată în perioada de serviciu pot impune reconsiderarea parţială a proiectului şi reluarea unor etape din fazele de cercetare experimentală şi de pregătire a fabricaţiei astfel încât să se elimine cauzele de apariţie a defectelor. În alte cazuri pot apărea dificultăţi tehnologice în faza de pregătire a fabricaţiei sau în timpul procesului de producţie, care impun adoptarea unor modificări în proiect, a căror valabilitate trebuie confirmată prin teste experimentale înainte de a fi introduse în fabricaţie, pentru a nu favoriza apariţia ulterioară a

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
12
defectelor. De asemenea în timp pot fi descoperite vicii de proiectare, care impun reconsiderarea proiectului iniţial şi reluarea totală sau parţială a fazei încercărilor experimentale. Principalele etape din dezvoltarea unui autovehicul nou, legăturile şi corecţiile care pot interveni sunt prezentate schematic în figura 1.1.
După cum rezultă din cele prezentate mai sus lansarea pe piaţă a unui autovehicul nou presupune parcurgerea completă a celor patru faze. Cu cât defecţiunile sistematice şi cauzele acestora sunt depistate mai târziu, cu atât pierderile vor fi mai mari. Nivelul costurilor de remediere creşte considerabil când acestea sunt depistate în faza de producţie sau de exploatare.
Având în vedere schimbările rapide care au loc pe piaţa autovehiculelor, timpul scurs de la lansarea proiectului până la lansarea pe piaţă trebuie micşorat prin scurtarea timpilor de proiectare, cercetare experimentală, pregătire de fabricaţie şi prin abordarea unei strategii moderne de cercetare-dezvoltare, cum este ingineria concurentă. Dacă în anii 80 durata lansării pe piaţă a unui autovehicul complet nou era de 62-63 de luni, în prezent ea s-a redus la 43-44 luni, sau chiar mai puţin. Firma Peugeut a reuşit să reducă această durată la doar 33 luni. Prin abandonarea strategiei ingineriei convenţionale şi prin
utilizarea strategiei ingineriei concurente se realizează o suprapunere parţială a parcurgerii fazelor de proiectare şi încercare, renunţându-se la ideea obţinerii unui optim de fază în favoarea obţinerii unui optim în momentul lansării pe piaţă.
1.2 Încercări experimentale, importanţă, scop, clasificare, cerinţe Importanţa încercărilor autovehiculelor rezultă din faptul că diferite tipuri de
încercări, ca parte integrată a procesului de dezvoltare a unui autovehicul, contribuie în mod hotărâtor la îmbunătăţirea permanentă a acestora, în toate fazele dezvoltării. Prin încercări se verifică dacă principalii parametrii constructivi, indici tehnico-economici, calitatea execuţiei, performanţele, siguranţa şi rezistenţa în exploatare corespund cu documentaţia de execuţie. În cazul firmelor producătoare şi al unităţilor de reparaţii, prin încercări sunt validate procesele tehnologice de fabricaţie respectiv de reparaţie. În unităţile de exploatare prin încercări se stabileşte tipul optim de autovehicul pentru anumite condiţii de lucru, precum şi regimurile cele mai avantajoase de exploatare ale acestora.
Prin încercările efectuate pe autovehicule în ansamblu sau pe subansambluri ale acestora sunt puse în evidenţă: particularităţi funcţionale ale acestora; mărimi care caracterizează dinamicitatea, stabilitatea sau economicitatea; determinarea rezistenţei
Fig.1.1 Fazele dezvoltării unui autovehicul nou.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
13
în exploatare; cercetarea proceselor care au loc în diferite subansambluri şi mecanisme, precum şi în autovehiculul în ansamblu; etc.
Dintre obiectivele principale ale încercărilor pot fi enumerate următoarele: să verifice indicatorii tehnico-economici prevăzuţi în tema de proiectare; să descopere viciile de proiectare, de tehnologie sau de material; să verifice calitatea execuţiei; să valideze îmbunătăţirile constructive sau tehnologice aduse proiectului iniţial; să creeze baze de date complexe care pot fii utilizate la proiectarea autovehiculelor similare; să furnizeze date pentru estimarea cât mai corectă a duratei de serviciu a autovehiculului; să verifice compatibilitatea autovehiculului studiat cu diferite regimuri de exploatare; să verifice dacă prin proiect şi execuţie autovehiculul studiat corespunde cerinţelor impuse prin normativele interne şi internaţionale; etc.
Pentru a asigura o exploatare eficientă şi economică în toată perioada de serviciu, autovehiculul trebuie verificat cu atenţie, în momentul optim. Deşi nu se poate face o delimitare foarte strictă a încercărilor, poate fii schiţată o clasificare a acestora după următoarele criterii: după destinaţia încercărilor; după obiectul supus cercetării experimentale; după scopul cercetării experimentale; după condiţiile şi metodele de încercare. O astfel de clasificare principială este prezentată în tabelul 1.1.
Tabelul 1.1
Clasificarea încercărilor autovehiculelor. Încercări de cercetare ştiinţifică Încercări de omologare sau de tip Încercări de control periodic sau de lot
După destinaţie
Încercări de recepţie Încercări ale subansamblurilor autovehiculelor Încercări ale autovehiculului în ansamblu
După obiectul supus cercetării experimentale
Încercări pe modele la scară Încercări funcţionale Încercări de rezistenţă
După scopul cercetării experimentale
Încercări de durabilitate Încercări de laborator Încercări de drum Încercări de exploatare
După condiţiile şi metodele de încercare
Încercări în condiţii speciale
După destinaţia încercărilor, aşa cum rezultă din tabelul 1.1, deosebim următoarele tipuri de încercări: încercări de cercetare ştiinţifică; încercări de omologare sau de tip; încercări de control periodic sau de lot; încercări de recepţie.
Încercările de cercetare ştiinţifică sunt cele mai variate ca obiective, amploare şi mijloace utilizate pentru efectuarea lor. Acestea se efectuează în scopul rezolvării unor probleme complexe de interes general cum ar fii: studiul unor autovehicule noi sau a unor subansambluri noi; utilizarea unor noi tipuri de combustibili sau lubrifianţi; înlocuirea unor tehnologii cu altele mai moderne; înlocuirea unor materiale cu altele mai economice; cercetarea în detaliu a proceselor ce au loc în motor sau alte subansambluri ale autovehiculului; verificarea unor mecanisme şi piese noi; cercetarea

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
14
interacţiunii autovehiculului cu calea de rulare şi cu mediul înconjurător; cercetări privind stabilirea noilor metodici de cercetare experimentală; etc. Acest tip de încercări se efectuează în mod uzual în institute de cercetare puternice şi în centrele de cercetare organizate pe lângă facultăţile tehnice cu tradiţie. Pentru industria constructoare de autovehicule, încercările de cercetare ştiinţifică au o importanţă deosebită, ele constituind principala modalitate de validare a produselor şi tehnologiilor moderne, contribuind la îmbunătăţirea continuă a autovehiculelor.
Încercările de omologare sau de tip au un caracter oficial şi se efectuează, de obicei, în conformitate cu prevederile unor acte normative naţionale sau internaţionale cu caracter de lege. Prin aceste sunt alese prototipurile ce urmează să fie introduse în fabricaţia de serie, validându-se proiectul şi este încercată “seria zero” validându-se tehnologia de fabricaţie a noului autovehicul. Prin urmare se deosebesc două etape omologarea prototipului, ce constituie acceptarea soluţiilor constructive propuse a fi introduse în fabricaţie, şi omologarea seriei zero, având ca obiectiv avizarea tehnologiei de fabricaţie a unui autovehicul omologat ca prototip.
Procesul de dezvoltare a unui autovehicul nou presupune inevitabil proiectarea şi realizarea unui prototip şi încercarea şi perfecţionarea acestuia. În timpul încercărilor prototipului sunt puse în evidenţă deficienţele şi lipsurile de construcţie şi apreciază materialele de construcţie şi de exploatare utilizate, se stabilesc reglajele optime. Încercările de omologare ale autovehiculului în ansamblu trebuie să fie precedate de încercările de omologare ale principalelor ansambluri: motor; ambreiaj; cutie de viteze; transmisie longitudinală; punţi motoare; punţi nemotoare; suspensie; sistem de direcţie; etc.
După validarea prototipului se trece la fabricarea şi apoi încercarea “seriei zero”. În cadrul acesteia se execută cel puţin un lot de 10-15 autovehicule, utilizând maşinile unelte, sculele, dispozitivele şi verificatoarele proiectate şi executate pentru producţia de serie, pentru a se obţine aprecieri satisfăcătoare. Prin încercarea “seriei zero” se verifică tehnologia de fabricaţie, acestea presupun efectuarea unor probe în condiţii de exploatare, şi repetarea unor probe efectuate la încercarea prototipului. Încercările de omologare sunt încercări complexe de lungă durată, care au ca scop validarea proiectului şi a tehnologiei de fabricaţie a unui autovehicul nou.
Încercările de control periodic sau de lot se efectuează pentru a verifica dacă producătorul menţine nivelul de calitate al autovehiculului stabilit şi certificat prin omologare. În cadrul acestora sunt testate un procent mic din autovehiculele fabricate în serie, iar durata acestora trebuie să fie mai mică de 6 luni sau de 40.000 km rulaţi efectiv. De obicei se încearcă un autovehicul dintr-un lot de 3000-6000 de bucăţi sau un autovehicul pe trimestru, funcţie de mărimea seriei de producţie. Este raţional ca perioada de repetare a acestor probe să fie cât mai mare, iar amploarea lor să fie limitată la indicatorii esenţiali spre a reduce cheltuielile de fabricaţie. Atingerea acestui deziderat presupune un nivel ridicat şi stabil de calitate al fabricaţiei autovehiculului.
În cadrul acestor încercări se verifică şi durabilitatea organelor autovehiculului, această încercare fiind similară cu cea din cadrul încercărilor de omologare, cu deosebirea că se execută într-un timp mai scurt şi pe un parcurs mai redus. Există şi un program minim cadru în baza căruia trebuie să se desfăşoare încercările de control periodic, respectiv un rulaj de aproximativ 5.000 km, efectuat într-un timp de minimum 15 zile.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
15
Încercările de recepţie pot fi considerate ca fiind încercări incluse în procesul tehnologic de fabricaţie. Acestea se fac în scopul verificării calităţii autovehiculelor din fabricaţia curentă sau din reparaţii. În afara controlului final, care se execută de producător la toate autovehiculelor, controlul de recepţie se face de beneficiar sau de împuternicitul acestuia. În general încercările de recepţie au un caracter limitat şi urmăresc dacă autovehiculul îndeplineşte condiţiile generale de funcţionare.
După obiectul supus cercetării experimentale, încercările se clasifică în:
încercarea subansamblurilor şi agregatelor, încercarea autovehiculului în ansamblu şi încercări efectuate pe modele la sacră.
Încercarea subansamblurilor se face pentru a determina caracteristicile fiecărui ansamblu şi agregat al autovehiculului. Aceasta se referă la încercarea motorului, organelor transmisiei, direcţiei, suspensiei, frânelor, roţilor şi altor organe şi ansambluri ale autovehiculului. Încercarea ansamblurilor în condiţii de laborator trebuie să preceadă încercarea autovehiculului în ansamblu, atât în condiţii de laborator cât şi pe parcurs.
Încercarea autovehiculului în ansamblu se face pentru a stabili principalele caracteristici, parametrii şi performanţe privind: caracteristicile dimensionale şi de masă; calităţile dinamice; calităţile economice; capacitatea de trecere; confortabilitatea; ergonomia postului de conducere; fiabilitatea; securitatea circulaţiei; stabilirea coeficienţilor care caracterizează interacţiunea dintre autovehicul şi mediul înconjurător; pierderile din transmisie; etc.
Încercări pe model la scară se efectuează în scopul renunţări la unele încercări a căror preţ de cost este foarte ridicat. În locul obiectului de încercare se utilizează modele la scară urmând ca caracteristicile, parametrii şi performanţele autovehiculului să fie determinate pornind de la caracteristicile, parametrii şi performanţele modelului în baza legilor similitudinii geometrice, cinematice şi dinamice.
După scopul cercetării experimentale deosebim următoarele principale categorii
de încercări: încercări funcţionale; încercări de rezistenţă; încercări de durabilitate. Încercările funcţionale au ca principal scop punerea în evidenţă a unor caracteristici,
parametrii şi performanţe funcţionale şi de exploatare ale autovehiculului în ansamblu sau ale diferitelor subansambluri ale acestuia, cum sunt: parametrii capacităţii de trecere; parametrii de virare; etc.
Încercări de rezistenţă prin intermediul cărora sunt stabilite solicitările care produc distrugerea ansamblurilor şi subansamblurilor.
Încercări de durabilitate, dintre care deosebim încercările normale la care solicitările la care sunt supuse piesele sunt similare cu cele din exploatare şi accelerate la care solicitările sunt amplificate în vederea scurtării timpului de încercare. O altă metodă de scurtare a timpului de încercare în cazul probelor de durabilitate este mărirea frecvenţei de aplicare a solicitărilor variabile periodice în cazul în care aceasta nu influenţează în mod direct durata de viaţă.
După condiţiile şi metodele de încercare deosebim următoarele tipuri principale
de încercări: încercări de laborator; încercări de drum; încercări de exploatare; încercări în condiţii speciale.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
16
Încercările de laborator ale autovehiculului în ansamblu sau ale subansamblurilor acestuia se execută în condiţii staţionare, folosindu-se instalaţii prevăzute cu aparatură adecvată de încărcare, măsurare şi înregistrare. Încercările de laborator prezintă avantajul că permit cercetarea fenomenelor cu precizie ridicată şi fac posibilă înlăturarea influenţei factorilor care nu sunt studiaţi. Neajunsul metodei este acela că în laborator, nu pot fii simulate întocmai condiţiile în care funcţionează autovehiculul în exploatare.
Încercările de drum (de parcurs) se efectuează pe piste de încercare special amenajate sau pe porţiuni de drum prevăzute cu denivelări, cu profiluri şi acoperiri astfel realizate încât să corespundă condiţiilor reale de exploatare. În cazul în care traseele de încercare sunt corect alese, metodele de încercare şi aparatura utilizată corespund scopului urmărit şi condiţiilor de încercare, precizia datelor de încercare va fi pe deplin satisfăcătoare. Avantajul principal al metodei este că încercarea se face în condiţii foarte apropiate de cele de exploatare, fapt care asigură obţinerea unor rezultate similare cu cele din exploatare.
Încercările de exploatare se fac în mod periodic în condiţiile de lucru obişnuite ale întreprinderilor de exploatare de către personal calificat în acest sens, atât din întreprinderea producătoare cât şi din cea de exploatare. Precizia rezultatelor este cu atât mai bună cu cât numărul autovehiculelor încercate este mai mare, numărul încercărilor este mai ridicat şi durata lor este mai mare. În unele cazuri se recomandă efectuarea încercărilor combinate, de laborator şi de exploatare, pentru a completa şi valida rezultatele obţinute prin fiecare metodă separat. Dacă numărul autovehiculelor alese pentru încercare este suficient de mare, cercetările pot fii efectuate concomitent.
Încercările în condiţii speciale se efectuează în cazul autovehiculelor ce urmează să fie exploatate în condiţii speciale. Condiţiile speciale de încercare pot presupune: rulaj prelungit în coloană pe drumuri cu mult praf.; rulaj prelungit la temperaturi ridicate (35-45oC); rulaj cu viteză redusă pe teren nisipos şi mlăştinos; rulaj în condiţii de temperatură foarte scăzută ( sub -25oC); rulaj în condiţii tropicale; rulaj la altitudine ridicată; etc.
Este de remarcat faptul că aceste tipuri de clasificări ale încercărilor au un caracter orientativ, delimitarea precisă a încercărilor fiind foarte greu de realizat. Obţinerea unor rezultate concludente presupune de cele mai multe ori efectuarea unor încercări combinate care să se completeze reciproc.
Principalele cerinţe impuse încercărilor sunt: obiectivitatea; repetabilitatea;
corectitudinea; rapiditatea efectuării; economicitatea. Cerinţa ca încercările să fie obiective decurge de la sine, dacă se are în vedere
importanţa definirii unei soluţii constructive optime sau a cunoaşterii reale a stării tehnice a unui autovehicul aflat în exploatare fără idei preconcepute şi/sau considerente subiective.
Obiectivitatea încercărilor se realizează prin: atitudinea imparţială şi lipsită de prejudecăţi a încercătorului; asigurarea unor condiţii de încercare nesingulare şi neprivilegiate din punctul de vedere al eforturilor impuse autovehiculelor; eliminarea posibilităţii unor interpretări subiective a rezultatelor încercărilor, prin respectarea riguroasă a programului de încercare, utilizarea pe scară largă a aparaturii de încercare cu posibilităţi de înregistrare a datelor, respectarea metodologiei de prelucrare a

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
17
datelor; stabilirea cauzelor ce au dus la neînscrierea unor parametrii constructivi şi funcţionali în limitele prevăzute de documentaţia tehnică.
Pentru autovehicule, repetabilitatea încercărilor presupune încercarea în aceleaşi condiţii astfel încât pentru un autovehicul dat cu o stare tehnică bine precizată, rezultatele unor încercări repetate şi/sau efectuate în condiţii similare să nu difere semnificativ, iar aprecierile rezultate să rămână invariante.
Repetabilitatea încercărilor se realizează prin: utilizarea unor metode de încercare care nu sunt afectate de factorii ambientali aleatori; eliminarea sau atenuarea influenţei factorului uman prin utilizarea aceluiaşi şofer de încercare sau a unor conducători auto cu structură psiho-fiziologică şi pregătire profesională similară; limitare domeniului de variaţie a condiţiilor de încercare, acestea fiind foarte precis stabilite prin standardele care reglementează încercările (spre exemplu ST 6926/1).
Ideii de repetabilitate i se subscriu şi eforturile unor organizaţii internaţionale (I.S.O., D.I.N., S.A.E.) de a elabora unele normative de încercare cu grad mare de generalitate acceptate in diferite ţări.
Obţinerea corectitudinii încercărilor este în strânsă corelaţie cu asigurarea obiectivitătii şi repetabilităţii acestora, dar totodată mai presupune: cunoaşterea detaliată a fenomenelor investigate prin încercare; stabilirea judicioasă a limitelor de variaţie a parametrilor măsuraţi, utilizarea unor scheme de măsurare şi a unei aparaturi judicios alese; întocmirea corectă şi completă a programului de încercare, respectarea standardelor referitoare la acesta; asigurarea preciziei de măsurare impuse prin standarde; interpretarea justă a rezultatelor obţinute în urma încercărilor; repetarea încercărilor ori de câte ori rezultatele obţinute au caracter contradictoriu sau nu corespund cu cele disponibile de la încercări anterioare şi/sau determinate prin calcul.
Nu sunt greu de imaginat consecinţele grave pe care le poate avea luarea unor decizii de acceptare a lansării în fabricaţie şi/sau exploatare a autovehicule a căror proiect şi tehnologie au fost validate prin încercări incorecte.
Importanţa obţinerii rapide a rezultatelor unei încercări este uneori presantă, încât riscă să devină un scop în sine şi să compromită esenţial încercările. Obiectivul de rapiditate al încercărilor trebuie obţinut fără diminuarea altor calităţi impuse acestora, prin: programare judicioasă a succesiunii fazelor de încercare (eliminarea timpilor morţi); utilizarea pe cât posibil a metodelor de încercare accelerată; prelucrarea şi interpretarea rapidă a datelor prin folosirea sistemelor moderne de achiziţie stocare şi prelucrare a datelor obţinute în urma încercărilor; reducerea la minim a volumului încercărilor cu asigurarea unui nivel rezonabil de încredere.
Încercările constituie operaţiuni neproductive direct, consumatoare de timp, combustibil, materiale, forţă de muncă, iar costul acestora se reflectă direct în preţul autovehiculului. Asigurarea economicităţii încercărilor implică: întocmirea programului de încercare astfel încât volumul şi durata lucrărilor să fie minim fără a afecta calitatea acestora; efectuarea încercărilor pe cât posibil pe standuri şi în poligoane; în cazul probelor de parcurs, asocierea încercărilor de agregate şi ansambluri pe acelaşi autovehicul; încercarea unui număr mare de agregate sau ansambluri pe automobile aflate în exploatare; utilizarea datelor furnizate de sistemul service al întreprinderii producătoare; utilizarea la încercare a unui personal cu înaltă calificare profesională.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
18
1.3 Pregătirea încercării autovehiculelor În cele mai multe cazuri încercarea unui autovehicul sau a unui ansamblu al
acestuia se face în baza unei teme program de cercetare, anexată la contractul sau comanda lansată de beneficiarul încercării. Echipa de specialişti care va efectua încercarea trebuie să formuleze foarte clar obiectivele încercării, să aducă corecţiile necesare acolo unde acest lucru se impune, astfel încât desfăşurarea încercărilor să fie optimă, iar rezultatele acesteia să satisfacă în totalitate necesităţile beneficiarului. În cazul în care rezultatele buletinului de încercare sunt nefavorabile, din acesta trebuie să rezulte cauzele care au condus la nevalidarea produsului şi corecţiile care trebuie aduse pentru eliminarea acestora. Pentru a permite o anumită flexibilitate a programului de încercare şi o dozare corectă a eforturilor materiale şi umane, în scopul eficientizării procesului de încercare este necesară o delimitare a obiectivelor în principale şi secundare.
Obţinerea unor rezultate viabile în urma încercării autovehiculelor sau a subansamblelor trebuie asigurată încă din faza de pregătire a încercării. În această fază echipa care va efectua probele trebuie să-şi formeze o viziune clară şi corectă asupra: obiectivelor încercării; mijloacelor ce trebuie folosite în timpul încercării; etapele ce urmează să fie parcurse în timpul încercării; domeniul probabil în care se vor încadra rezultatele încercărilor. De multe ori sunt necesare săptămâni sau chiar luni de pregătire pentru o zi, o oră, un minut, sau o fracţiune de secundă în care se face încercarea.
1.3.1 Întocmirea programului de încercări Programul general de încercări este de obicei impus prin standarde sau norme
interne institutuţiei care efectuaează lucrările, organizatorilor desfăşurării acestora le revine obligaţia de a elabora un program detaliat care să asigure o eficienţă maximă a încercărilor.
Programul de încercare trebuie să cuprindă: Obiectivele încercării; Fazele de încercare prezentate în ordine cronologică cu precizarea obiectivelor
parţiale specifice fiecărei faze şi a termenelor de execuţie; Detalierea fiecărei faze de încercare, enumeraea în amănunt a lucrărilor
specifice, a locurilor, traseelor, poligoanelor sau standurilor de încercare şi a termenelor de execuţie;
Cerinţele de mediu necesare efectuării încercărilor; Regimurile de încercare avute în vedere în timpul probelor, sarcina utilă a
autovehiculelor la care se execută proba, regimul de viteză, etc.; Numărul parametrilor cercetaţi, complexitatea încercărilor şi numărul de repetări
a experimentelor; Precizia de măsurare a parametrilor determinaţi prin încercari, care trebuie să fie
în concordanţă cu valorile recomandate prin documentaţia tehnică şi prin standardele naţionale şi internaţionale;
Aparatura de măsurare, achiziţie a datelor şi de prelucrare a acestora, care trebuie să permită o apreciere rapidă, dacă este posibil în timp real a rezultatelor

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
19
pentru a aprecia reuşita încercării şi dacă este cazul necesitatea reluări parţiale sau totale a probei cu menţinerea sau schimbarea metodicii de încercare;
Responsabilităţile care revin părţilor contractante şi/sau colaboratorilor pentru asigurarea materială a încercărilor;
Responsabilităţile care revin individual personalului de încercare; Condiţiile specifice încercărilor pe stand, dacă este cazul; Numărul de produse încercate;
Programul de încercări depinde de: scopul cercetării experimentale (determinarea
calităţilor dinamice, de exploatare, etc.); de tipul autovehiculului (autoturism, autocamion, autoturism de teren, autocamion de teren, trenuri auto, tractoare de transport, tractoare agricole, tractoare industriale, etc.); de destinaţia încercării (cercetare ştiinţifică, de omologare sau de tip, de control periodic sau de lot, de recepţie).
Având în vedere cele prezentate mai sus rezultă că programele de încercări vor diferi între ele, dar vor avea şi foarte multe elemente comune aşa cum rezultă din schema aproximativă a etapelor de lucru în cadrul diferitelor tipuri de încercari prezentată în tabelul 1.2.
Tabelul 1.2
Schema aproximativă a etapelor de lucru pentru diferite tipuri de încercări. Tipul încercării
De omologare Denumirea etapei de lucru
Cercetare ştiinţifică Prototip Seria
zero
Control periodic
Recep-ţie
0 1 2 3 4 5 Verificarea documentaţiei de execuţie
Stabilirea programului de încercări
Pregătirea condiţiilor materiale necesare efectuării încercării
Pregătirea autovehiculului în vederea efectuării incercărilor
Verificarea funcţională preliminară şi verificarea calităţii montajului autovehiculului în ansamblu
Determinarea parametrilor dimensionali

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
20
0 1 2 3 4 5
Verificarea pe stand a subansamblurilor
Determinarea greutăţii autovehiculului şi repartiţia pe punţi
Determinarea poziţiei roţilor şi a razei minime de viraj
Verificarea caroseriei Verificarea calităţilor dinamice Verificarea capacităţii de trecere Determinarea calităţilor de exploatare
Verificarea durabilităţii Determinarea regimurilor termice Încercări de laborator Cercetarea zgomotului Verificarea automobilului în exploatare la beneficiar
Rulaj de control recepţie Încercări speciale
Elaborarea programului de încercare reprezintă una din cele mai importante faze ale încercărilor autovehiculelor, în care personalul implicat trebuie să posede o viziune clară şi unitară care să conducă la efectuarea unor încercări obiective, corecte, repetabile, efectuate în timp util şi cu eficienţă economică maximă.
1.3.2 Alegerea, recepţia şi pregătirea autovehiculelor pentru încercări Numărul autovehiculelor care se încearcă se alege funcţie de felul încercărilor
programate. La încercările de omologare spre exemplu se încearcă tot lotul de prototipuri şi întreaga “serie zero”, dacă numărul de autovehicule nu depăşeşte 10-15 buc. În cazul încercărilor de control periodic autovehiculele se aleg din fabricaţia curentă, în funcţie de volumul producţiei. Încercările de recepţie se efectuează la toate autovehiculele fabricate. În cazul altor tipuri de încercări, ca de exemplu cele de cercetare ştiinţifică sau de exploatare , numărul autovehiculelor care se încearcă se stabilesc de la caz la caz, în funcţie de scopul urmărit şi de programul de încercare stabilit. În toate cazurile se urmăreşte ca autovehiculele să fie corect asamblate, complet echipate cu accesorii şi scule şi să corespundă în totalitate stării tehnice impuse prin caietul de sarcini. Prin urmare, alegerea autovehiculului sau a autovehiculelor care trebuie încercate trebuie făcută astfel încât acesta sau acestea să fie reprezentativ respectiv reprezentative pentru o categorie bine definită pentru care se urmăreşte obţinerea unor informaţii viabile prin intermediul diferitelor tipuri de încercări. În cazul în care nu sunt respectate aceste reguli, apar dispersii mari ale rezultatelor, iar utilitatea acestora se micşorează până ce devine nesemnificativă.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
21
În funcţie de caracterul şi de volumul încercărilor la care este supus autovehiculul, se face pregătirea acestuia pentru încercare, care cuprinde următoarele etape: controlul stării tehnice a autovehiculului încercat, respectiv recepţionarea autovehiculului pentru încercare; întocmirea specificaţiei tehnice a autovehiculului; etalonarea şi instalarea aparatelor de măsurare, stocare şi prelucrare a datelor; stabilirea metodologiei de încercare în conformitate cu normele şi standardele în vigoare.
Recepţionarea autovehiculului se face în funcţie de tipul încercărilor ce urmează să fie executate. Spre exemplu, în cazul încercărilor periodice, autovehiculul trebuie astfel ales, încât să nu fie posibilă înlăturarea defectelor de fabricaţie prin reglaje suplimentare, care pot crea o imagine falsă asupra calităţii producţiei curente. În cazul recepţionării modelelor experimentale se acceptă eliminarea defectelor de fabricaţie înainte de executarea încercărilor, în vederea punerii în concordanţă a autovehiculului încercat cu condiţiile tehnice impuse de proiectant.
O primă activitate de recepţie a autovehiculului pentru încercare, indiferent de tipul încercărilor care urmează să fie efectuate, o constituie confruntarea cu prevederile documentaţiei de execuţie sau de însoţire. Dintre aceste se pot enumera următoarele: tipul; intreprinderea producătoare; numărul de serie pentru motor; numărul de serie pentru şasiu sau caroserie; caracteristicile tehnice ale autovehiculului în ansamblu şi ale componentelor acestuia. Ansamblul autovehiculului este caracterizat prin parametii de masă, paramerii dimensionali, parametrii funcţionali şi prin parametrii energetici, iar componentele acestuia sunt caracterizate prin parametrii specifici, cum sunt: raportul de transimitere; randamentul; coeficientul de amortizare; coeficientul de frecare; etc. Documentaţia tehnică în baza căreia se pot face aceste verificări trebuie să cuprindă: desenele de ansamblu ale autovehiculului; desenele de ansamblu şi de montaj ale principalelor subansamble; lista accesoriilor şi sculelor din componenţa setului de livrare; instrucţiuni de întreţinere şi de exploatare; cartea de reparaţii; catalogul pieselor de schimb; etc.
Pornind de la cerinţele programului de încercare se pot efectua şi măsurători iniţiale ale unor piese supuse uzării ( pneuri, bolţuri de arcuri, garnituri de fricţiune, arbori, angrenaje, etc.), verificări de stand ale unor subansamble (sistem de frânare, sistem de direcţie, sistem de iluminare), sigilări ale unor componente la care nu se admit intervenţii în timpul încercării.
Stările de încercare specifice pentru diferitele tipuri de încercări sunt definite prin ST 6926/1, iar în cazul încercărilor de cercetare pot fi adoptate conform cerinţelor impuse prin caietele de sarcini.
În cazul în care autovehiculul se încearcă pe drumurile publice, se vor fixa semnale avertizoare având forma şi dimensiunile arătate în figura 1.2, “ATENŢIUNE ÎNCERCĂRI”, care vor fi montate vizibil pe partea din faţă şi din spate a autovehiculului. Textul inscipţiei se va înscrie cu roşu pe fond alb, iar numărul provizoriu al autovehiculului ce urmează a fi
Fig. 1.2 Inscripţie de avertizare montată pe
autovehicul în timpul încercărilor efectuate pe drumuri publice.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
22
încercat este precedat de “PROBE”. Înaintea oricărui tip de încercare se va verifica starea tehnică a autovehiculului, iar
înaintea încercărilor privind dinamicitate şi consumul, motorul şi transmisia se vor încălzi la temperatura nominală prin efectuarea unui rulaj de lungime suficientă şi se vor verifica pierderile totale prin metoda rulării libere conform ST 6926/9.
Efectuarea adaptărilor pentru montarea aparaturii de măsură, achiziţie şi prelucrare a datelor experimentale, verificarea funcţionării şi etalonarea acestora sunt etape care fac parte din pregătirea autovehiculului pentru încercare.
Trebuie precizat faptul că efectuarea încercărilor se poate face doar după ce autovehiculul este rodat conform prescripţiilor uzinei producătoare şi după ce acesta ajunge la regimul de funcţionare nominal.
1.3.3 Alegerea şi pregătirea aparaturii de măsurare Pentru a obţine informaţiile dorite privind calităţile autovehiculelor încercate şi
pentru a înregistra cât mai fidel rezultatele încercărilor, sub formă digitală, analogică, sau grafică, în afara aparatelor de bord din dotarea standard se vor monta aparate de măsură, achiziţie şi prelucrare a datelor suplimentare. Numărul şi complexitatea aparaturii necesare încercărilor depinde în principal de tipul încercării, de condiţiile de încercare şi de gradul de utilare al laboratorului care urmează să efectueze cercetarea experimentală.
Asigurarea unei calităţi ridicate a cercetărilor experimentale, în condiţii de eficienţă economică maximă, presupune utilizarea unei instalaţii de măsurare, achiziţie şi prelucrare a datelor adecvate. Alegerea corectă a metodei de măsurare, utilizarea celor mai adecvate aparate de măsurare, achiziţie şi stocare a datelor, utilizarea celor mai performante softuri de prelucrare a datelor şi conceperea corectă a lanţului de măsură constituie premisa principală pentru obţinerea unor rezultate viabile în urma încercărilor. De asemenea trebuie asigurate condiţii optime de funcţiomnare a întregului lanţ de măsurare prin izolarea de vibraţii, protejarea de acţiunile excesive ale mediului ambiant, asigurarea tensiunii de alimentare corespunzătoare, etc. Calitatea unei măsurători depinde şi de caracteristicile metrologice (clasa de precizie, sensibilitatea, pragul de sensibilitate, puterea de rezoluţie) şi dinamice (domeniul dinamic, funcţia de transfer, domeniul de frecvenţe) ale aparaturii utilizate. În condiţiile în care pentru eficientizarea procesului de dezvoltare a unui autovehicul se impune scurtarea timpului de încercare, încercările acelerate ale componentelor şi/sau autovehiculelor în ansamblu sunt din ceîn ce mai utilizate. Aceasta impune creşterea volumului şi a vitezei de obţibnere a datelor în urma încercărilor, fapt care a condus la utilizarea unor lanţuri de măsură, achiziţie, prelucrare şi stocare a datelor foarte performante, care permit prelucrarea on-line a datelor, la finalul încercării fiind obţinută şi o primă formă finală a rezultatelor.
O etapă importantă în pregătirea aparaturii de măsurare, achiziţie, prelucrare şi stocare a datelor o constituie verificarea funcţionării şi etalonarea întregului lanţ. Aceasta se va face la începutul experimentării şi apoi periodic la anumite intervale de timp sau înaintea unor probe importante pentru a constata dacă între timp nu au apărut dereglări care pot afecta rezultatele încercărilor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
23
1.3.4 Alegerea şi pregătirea traseelor de măsurare În funcţie de caracterul experimentării sau al performanţelor care se determină,
încercarea autovehiculelor se face pe diferite categorii de drum. Indiferent de tipul încercărilor de parcurs sunt precizate cu exactitate condiţiile de drum în care se efectuează încercările.
În cazul efectuării probelor pentru stabilirea parametrilor dinamici şi economici ai autovehiculelor drumul trebuie să îndeplinească următoarele cerinţe: să aibă îmbrăcăminte tare, fără denivelări (cu acoperire de beton sau asfalt); să fie orizontal, în limita unor înclinări de maxim ± 5%; să fie rectiliniu; să aibă o lungime de 4-5 Km (astfel încât sa asigure atât porţiunea de lansare cât şi cea de frânare); să aibă o lăţime de 7,5 m; să fie ferite de vânt (în special de cel lateral); să fie jalonate cu pietre kilometrice şi hectometrice. Influenţa abaterii de la orizontalitatea drumului poate fi micşorată printr-o măsură acceptabilă prin repetarea probei din direcţie opusă şi adoptarea ca rezultat final al încercării a mediei aritmetice a celor două sau mai multe probe.
În cazul încercărilor efectuate pe drumuri publice, vor fi alese tronsoane cu circulaţie redusă, care pot fi temporar închise, cu acordul autorităţilor de resort. La
capetele şi pe intrările laterale ale tronsoanelor de drum utilizate pentru încercări se amplasează inscripţii de prevenire, având forma, dimensiunile şi conţinutul arătate în figura 1.3. Pentru a preveni apariţia accidentală a unor autovehicule în timpul efectuarii probelor efectuate cu închiderea circulaţiei (de obicei probele pentru determinarea parametrilor dinamici) intrările principale şi cele laterale sunt blocate sau prevăzute cu posturi de pază.
Dintre metodele de încercare la anduranţă sau la durabilitate ale autovehiculelor în ansamblu sau ale subansamblelor acestora, una dintre cele mai precise este încercarea în condiţii de trafic real, care se efectuează pe drumuri publice normale, încărcate la capacitatea nominală sau parţial, cu conducători auto care manifestă diferite temperamente de conducere şi în condiţii meteorologice specifice regimurilor de explatare. În timpul acestor încercări se recomandă să fie culese şi date necesare pentru stabilirea cât mai corectă a regimurilor de calcul şi a regimurilor de încercare pe stand sau în poligon.
Pentru a alege cât mai corect traseele pe care se efectuează încercările de anduranţă sunt necesare studii statistice prin care să să fie puşi în evidenţă factorii care determină regimurile de exploatare şi influenţează în mod hotărâtor solicitările din diferitele componente ale autovehiculelor [1], [2], [3]. Principalele caracteristici ale traseului pe care se efectuaează încercările sunt date de macroprofilul şi de microprofilul drumului.
Macroprofilul căii de rulare este caracterizat în principal de înclinarea longitudianală în funcţie de spaţiu sau timp, care poate fi caracterizată statistic prin frecvenţa de apariţie a diferitelor clase de înclinate longitudinală. O altă componentă importantă a
Fig. 1.3. Inscripţie de prevenire montată la
intrarea pe sectoarele de drum pe care se fac încercări.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
24
macroprofilului căii de rulare o constituie configuraţia drumului care este dată de: numărul de viraje pe km parcurs; raza virajelor; înclinarea transversală; vizibilitatea; etc. Din punct de vedere al macroprofilului căii de rulare se pot considera ca reprezentative următoarele patru categorii de drum: autostradă; drum urban sau de oraş; drum de şes; drum de deal şi de munte. Din punct de vedere al microprofilului căii de rulare semnificative sunt drumurile modernizate şi cele nemodernizate. Datele statistice prezentate în [1], [2], [3] arată că majoritatea conducătorilor auto nu utilizează autovehiculul pe aelaşi tip de drum, la aproximativ 95% observânduse un “amestec” de tipuri de drum utilizate.
Tabelul 1.3
Distanţa percursă de autovehicule în timpul încercărilor de anduanţă [mii km]. Autobuze
interurbane Felul drumului Auto-
turisme Stan-dard
De turism
Auto-buze
urbane
Autoca-mioane
Auto-trenuri
Drumuri cu îmbră-căminte rigidă
50 45 50 50 25 40
Drumuri de piatră brută, bolovani
10 10 10 10 10 5
Drumuri de piatră spartă şi de pietriş
10 10 10 10 10 5
Drumuri de pământ 10 - - - 15 3 TOTAL: 80 70 70 50 60 53
Din care: În condiţii de munte 10 10 5 10 10 - În condiţii urbane 20 - 30 10 10 -
Categoria drumurilor este reglementată de obicei prin normative cu caracter legal. În condiţiile concrete din România, informaţiile cuprinse în Legea nr. 227/2003 (legea drumurilor), privind aprobarea OG nr. 26/2003 pentru modificarea şi completarea OG nr. 43/1997, Ordinul 284/2003 pentru aprobarea listelor cuprinzând drumurile publice ca limitele maselor şi dimensiunilor maxime admise pentru vehicule de transport marfă, HCM 1100/1968 şi ST 6926/19 nu sunt suficiente pentru delimitarea şi caracterizarea completă a diferitelor categorii de drumuri. Spre exemplu coeficienţii de echinvalare a categoriilor de drum definiţi prin HCM 1100/68 după natura şi starea îmbrăcăminţii drumului au scopul de a permite normarea consumurilor de combustibili, lubrifianţi şi anvelope în exploatare. În cazul încercărilor pentru stabilirea parametrilor de confortabilitate, a duratei de viaţă, sau a stărilor de solicitare din diferitele subansamble, precizarea categoriei de drum este insuficientă, dacă nu se iau măsuri ca tronsoanele pe care se efectuează încercările să fie suficient de lungi pentru a asigura obţinerea unor date specifice unui proces aleator ergodic. Conform ST 6926/19 autovehiculele supuse încercărilor de rulaj de durată (anduranţă) vor parcurge distanţele specificate în tabelul 1.3.
În cazul încercărilor pentru stabilirea parametrilor de confortabilitate sau a solicitărilor dinamice maxime o influenţă deosebită o are microprofilul căii de rulare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
25
Funcţia h(t) de variaţi a înălţimii profilului drumului în timp este aleatoare, motiv pentru care aceasta poate fi caracterizată prin parametrii statistici cum sunt densitatea spectrală şi funcţia de corelaţie. Cercetări experimentale prezentate în [4] pun evidenţă faptul ca acesţi parametrii nu diferă esenţial pentru roţile din partea stângă şi cele din partea dreaptă, fapt pentru care pot fi considerate, cu bună aproximaţie egale pentru toate firele de deplasare.
O serie de lucrări din R.F.G., Anglia şi S.U.A. propun aproximarea densităţii spectrale prin funcţii relativ simple (1.1.), de tip fracţionar-exponenţial cu exponent negativ, care se reprezintă în coordonate dublulogaritmice prin drepte:
( )ω
ννν
−
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅=
o
CS ( 1.1)
unde C şi ω sunt constante specifice pentru fiecare categorie de drum, ν este numărul de undă, iar νo este numărul de undă de referinţă (de obicei 1/2π[cicluri/m]). Prin analiza rezultatelor experimentale efectuate pe un număr foarte mare de tronsoane de drum, în [5] au fost determinaţi parametrii C şi ω. Aceştia sunt centralizaţi în tabelul
1.4., iar în figura 1.4. este prezentată grafic variaţia densităţii spectrale pentru diferite categorii de drumuri.
Tabelul 1.4
Tipul de drum C [m3/ciclu] ω Drum asfaltat 16*10-6 2,10 Drum betonat 24*10-6 1,90 Drum pavat 189*10-6 1,54
Din analiza densităţilor spectrale determinate de LaBARRE ş.a. în [6], s-a ajuns la concluzia că acestea pot fi aproximate suficient de bine prin expresii
analitice de forma (1.2.) [7] şi [8]:
( )
⎪⎪
⎩
⎪⎪
⎨
⎧
≥⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
≤⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
=−
−
o
o
2
1
νννν
νννν
νω
ω
o
o
C
CS ( 1.2);
1 în care au fost utilizate aceleaşi notaţii ca şi în (1.4). În tabelul 1.5, sunt prezentate valorile medii ale exponenţilor ω1 şi ω2 şi intervalele de variaţie ale coeficienţilor C pentru diferite categorii. Reprezentarea grafică a funcţiei (1.2), în coordonate dublu logaritmice are forma a două drepte care se intersectează pentru ν=νo, valoare care corespunde pentru o lungime de undă λ=6,3m.
1,00E-09
1,00E-08
1,00E-07
1,00E-06
1,00E-05
1,00E-04
1,00E-03
1,00E-02
1,00E-01
0,01 0,1 1 10Număr de undă [cicluri/m]
Den
sita
tea
spec
trală
[m^3
/cic
lu]
Drum asfalt Drum betonat Drum pavat Fig. 1.4. Densitatea spectrală pentru diferite
categorii de drumuri.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
26
Tabelul 1.5 Tipul/calitatea drumului C [m3/ciclu] ω1 ω2
Foarte bună 2-8 Autostradă Bună 8-32 1,945 1,360
Foarte bună 2-8 Bună 8-32 Medie 32-128 Drum principal
Rea 128-514
2,05 1,440
Medie 32-128 Rea 128-512 Drum
secundar Foarte rea 512-2048 2,28 1,428
Trebuie menţionat faptul că relaţii de forma (1.1) şi (1.2) nu pot fi utilizate pentru
aproximarea densităţii spectrale la valori mici sau foarte mari ale numerelor de undă ν, deoarece aceasta tinde la infinit, respectiv la valoarea zero. Prin urmare pentru determinarea şi simularea parametrilor statistici ai căii de rulare este suficientă utilizarea domeniului de numere de undă ν cuprinse între 0,2 şi 5,4 [cicluri/m] domeniu corespunzător unor lungimi de undă λ cuprinse între 0,19 şi 50 [m].
Stabilite prin teoria funcţiilor aleatore ergodice, caracteristicile unui drum pot fi exprimate numeric univoc şi pot fi corelate cu spectrele vibraţiilor induse în subansamblurile autovehiculelor.
O altă modalitate folosită pentru a caracteriza traseele de încercare, pe baza vitezelor medii de deplasare, vmed, ale autovehiculelor, constă în compararea acesteia cu viteza maximă, vmax. În baza acestei metode pot fi stabilite convenţional patru categorii de drum [9]: categoria I-a pentru care vmed>=0,7*vmax; categoria a-II-a pentru care vmed=(0,4…0,7)*vmax; categoria a-III-a pentru care vmed=(0,2…0,4)*vmax; categoria a-IV-a pentru care vmed<=0,2*vmax.
În unele cazuri specialiştii utilizează o descriere complexă a traseelor de încercare, care constă în prezentarea unor date care să caracterizeze cât mai complet regimurile de funcţionare ale autovehiculului în diferite condiţii de exploatare pe diferite categorii de drum. Pentru aceasta se efectuează încercări complexe, pentru diferite tipuri de autovehicule, prin care sunt monitorizate date cum sunt: colectivele de solicitare; spectrele de solicitare; timpi relativi de utilizare a diferitelor trepte de viteză; numărul de cuplări ale ambreiajului; viteza medie de deplasare pe fiecare treaptă; frecvenţa relativă şi cumulată de apariţie a claselor de viteză; spectrele solicitărilor în suspensia autovehiculului; etc. Datele obţinute sunt prezentate sub o formă cât mai accesibilă astfel încât specialiştii să poată elabora rapid modelele de calcul şi de încercare pentru autovehicule similare.
În cazul încercărilor ce urmează să fie efectuate pe drumuri publice, vor fi alese zone cu curculaţie redusă, care îndeplinesc condiţiile împuse de standardele de încercare în vigoare. Pentru încercările efectuate în scopul determinării parametrilor dinamici şi de frânare porţiunea de drum pentru încercare este temporar închisă în scopul asigurării condiţiilor de încercare. Dacă programul de încercare nu o cere porţiunile de drum pe care se fac încercări se aleg în zone unde nu există şanţuri de scugere adânci, pante abrupte sau alte obstacole naturale sau artificiale.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
27
2 MĂSURAREA PE CALE ELECTRICĂ A MĂRIMILOR NEELECTRICE
2.1 Generalităţi privind lanţul de măsurare
Măsurarea pe cale electrică a unei mărimi neelectrice constă în conversia acesteia într-un semnal electric – de obicei în tensiune electrică – a cărei valoare să fie proporţională cu mărimea măsurată.
Principalele părţile componente ale unui lanţ de măsurare (fig. 2.1) sunt: • traductorul; • circuitul electric de conectare al traductorului; • amplificatorul; • sistemul de afişare sau înregistrare; • placa de achiziţie, stocare şi prelucrare a datelor.
Fig. 2.1. Schema bloc a lanţului de măsură.
Traductorul transformă mărimea neelectrică măsurată (deplasare, viteză,
acceleraţie, forţă, temperatură, etc.) într-o mărime electrică proporţională cu aceasta. În acest scop traductorul este ataşat de obiectul de măsură.
Sistemul de alimentare furnizează energia electrică necesară traductorului. El poate fii o baterie electrică sau un oscilator de audio frecvenţă. În cazul traductoarelor care prin convertire generează curent electric nu este nevoie de sistem de alimentare separat.
Circuitul electric de conectare asigură adaptarea circuitului de ieşire din traductor la intrarea în amplificator. El trebuie să asigure sensibilitatea şi precizie de măsurare impuse de probele ce urmează să fie efectuate.
Amplificatorul are rolul de a amplifica semnalul pentru a asigura sensibilitatea dorită a sistemului de măsurare, cât şi de a adapta nivelul semnalului la valoarea cerută de echipamentul de afişare şi înregistrare şi/sau de sistemul de achiziţie stocare şi prelucrare a datelor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
28
Sistemul de afişare şi înregistrare asigură posibilitatea citirii, vizualizării şi/sau înregistrării valorii semnalului de ieşire din lanţul de măsurare. În acest scop se utilizează aparate de măsură analoge, numerice, osciloscoape, înregistratoare pe hârtie sau pe bandă magnetică ş.a. În cazul lanţurilor moderne de măsurare rolul sistemului de afişare şi înregistrare este preluat în totalitate de sistemele de achiziţie stocare şi de prelucrare a datelor.
Sistemul de achiziţie stocare şi de prelucrare a datelor are rolul de a prelua datele analogice de la amplificator sau de la înregistratorul cu bandă magnetică, face conversia lor analog numerică, le înregistrează pe hardisck. Prin softul de prelucrare a datelor pe lângă prelucrare şi reluare a prelucrării după algoritmii doriţi este posibilă şi afişarea în timp real a datelor sub forma oscilogramelor, variaţiei în timp a mărimilor etc. Aceste sisteme prezintă următoarele avantaje: permit stocarea unui număr mare de date de cercetare; culegerea datelor se poate face cu frecvenţe de eşantionare ridicate; permit reluarea prelucrării datelor fără reluarea probelor.
Cerinţa principală faţă lanţurile de măsură este redarea reală cu precizia dorită a mărimii măsurate. Pentru a asigura o precizie ridicată traductorul trebuie să furnizeze ca mărime de ieşire o mărime electrică proporţională cu mărimea măsurată. Pe de altă parte este necesar ca coeficientul de proporţionalitate să se păstreze constant pe întreg domeniul de măsură al traductorului.
În anumite condiţii, coeficientul de proporţionalitate al traductorului poate fii modificat, fapt care introduce distorsiuni în sistem şi generează erori de măsurare. Apariţia distorsiunilor este cauzată de una sau mai multe din următoarele cauze: modificarea încărcării mecanice a obiectului măsurii prin montarea traductorului; necorelarea impedanţelor de cuplare a lanţului de măsurare; necorelarea frecvenţei semnalului măsurat cu răspunsul în frecvenţă al componentelor lanţului de măsurare; nivel ridicat al zgomotului în lanţul de măsurare; calibrarea necorespunzătoare a semnalului de măsurare; eşantionarea necorespunzătoare a semnalului de măsurare la conversia analog digitală; etc.
Cunoscând cauzele de apariţie a distorsiunilor pot fi luate cele mai eficiente măsuri în vederea reducerii distorsiunilor şi a îmbunătăţirii preciziei de măsurare.
2.2 Traductoare
2.2.1 Rolul şi clasificarea traductoarelor Traductorul este elementul primar care preia mărimea neelectrică, o transformă într-
o mărime electrică, care este măsurată. Operaţia aceasta se numeşte convertire şi poate fii făcută în mai multe moduri. În tabelul 2.1 sunt reprezentate principalele tipuri de convertiri utilizate în cazul traductoarelor.
După modul în care se realizează convertirea traductoarele se pot împărţi în: • Traductoare generatoare (active), în cazul cărora convertirea se realizează prin
preluarea unei părţi din energia obiectului măsurat şi transformarea acesteia în energie electrică ai cărei parametrii sunt măsuraţi. Asemenea traductoare folosesc fenomene fizice ca: inducţia electromagnetică, efectul piezoelectric, efectul fotoelectric etc. Pentru a nu modifica comportarea sistemului mecanic

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
29
este necesar ca prin traductoarele generatoare să fie preluată o parte extrem de redusă din energia sistemului.
• Traductoare modulare (pasive), care realizează conversia prin modificarea unei mărimi de circuit electric, cum este: rezistenţa electrică, inductanţa, capacitatea, conductivitatea , etc. Această modificare poate fi efectuată prin intervenţie mecanică, prin utilizarea directă a unor legi ale fizicii sau prin metoda compensaţiei.
Aportul de energie pentru convertire se realizează prin alimentarea traducoarelor modulatoare de la o sursă exterioară de curent electric.
Tabelul 2.1
CONVERSIA MĂRIMILOR NEELECTRICE ÎN MĂRIMI ELECTRICE A. Producerea mărimilor electrice prin transformarea energiei
B. Modularea mărimilor electrice
1. Prin intervenţie mecanică
2. Prin utilizarea directă a unor legi fizice
3. Prin metoda compensaţiei
Mărimi produse: Mărimi modulate: Mărimi modulate: Mărimi modulate: Tensiune; Curent; Sarcină.
Rezistenţă; Inductanţă; Capacitate.
Rezistenţă; Conductivitate; Permeabilitate; Constantă dielectrică; Tensiune; Sarcină.
Curent
Exemple: Exemple: Exemple: Exemple: Tahogenerator; Termocuplu.
Traductor rezistiv de alungire; Traductor inductiv de deplasare.
Termometru cu rezistenţă.
Pirometru cu radiaţie.
Pentru cercetarea experimentală din domeniul autovehiculelor se utilizează cel mai
frecvent traductoarele modulatoare, cu modulare prin intervenţie mecanică şi traductoarele generatoare.
După destinaţie traductoarele pot fi clasificate în: • traductoare de deplasare; • traductoare de viteză; • traductoare de acceleraţie; • traductoare de forţă; • traductoare de moment; • traductoare de presiune; • traductoare de temperatură; • etc.
Fiecare traductor în parte, funcţionează în baza unui principiu de conversie descris anterior.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
30
2.2.2 Caracteristicile principale ale traductoarelor Pentru a asigura precizia cerută de tipul încercărilor efectuate trebuie avuţi în
vedere parametrii de evaluare a caracteristicilor traductoarelor utilizate. Prin intermediul lor se stabileşte gradul în care traductorul ales corespunde încercărilor ce urmează să fie efectuate.
Parametrii principali în baza cărora pot fi evaluate caracteristicile unui traductor sunt: caracterul funcţiei de convertire; sensibilitatea; scala totală a sarcinii; caracteristica de frecvenţă sau răspunsul de frecvenţă; scala totală de ieşire; rezistenţa la ieşire; tensiunea electrică de alimentare (excitare); histerezisul; sensibilitatea la influenţa condiţiilor de mediu; rigiditatea traductorului; dimensiunile de gabarit şi masa traductorului.
Caracterul funcţiei de conversie a mărimii neelectrice măsurate n, numită şi sarcină sau mărime de intrare în mărime electrică uo, este recomandabil să fie liniară, pe întreg domeniul de măsură al traductorului, pentru a uşura prelucrarea şi interpretarea datelor. Liniaritatea traductorului se apreciază prin diferenţa maximă dintre curba de etalonare a traductorului şi dreapta care trece prin punctele corespunzătoare sarcinii minime şi sarcinii nominale exprimate în procente.
Sensibilitatea traductorului este definită prin raportul dintre variaţia mărimii semnalului de ieşire Δuo şi variaţia corespunzătoare mărimii neelectrice de intrare (variaţia sarcinii) Δn. Raportul Δuo/Δn caracterizează panta dreptei de etalonare fiind numeric egală cu sinusul acesteia. Acest raport trebuie astfel ales încât să se obţină precizia dorită de măsurare. Valoarea minimă a variaţiei mărimii de intrare care produce o variaţie perceptibilă (măsurabilă) a semnalului de ieşire determină pragul de sensibilitate al traductorului.
Scala totală a sarcinii, reprezintă domeniul de utilizare al traductorului, adică domeniul cuprins între valoarea maximă şi minimă a amplitudinii mărimii neelectrice de intrare. Ea serveşte la alegerea corespunzătoare a traductorului, având în vedere că depăşirea sarcinii maxime conduce la apariţia neliniarităţilor sau la distrugerea traductorului, iar la valori mai mici decât valoarea minimă variaţia mărimii electrice nu oferă precizie suficientă de măsurare.
Caracteristica de frecvenţă sau răspunsul de frecvenţă, determină limitele de frecvenţă ale mărimilor care intră în traductor, astfel încât să nu se producă o deformare a semnalului de ieşire din traductor peste limitele admise. Limitarea de frecvenţă apare de obicei ca urmare a fenomenului de rezonanţă mecanică a sistemului format din obiectul de încercat şi traductor.
Scala totală de ieşire, este dată de diferenţa mărimilor electrice maximă şi minimă corespunzătoare limitelor totale de scală de sarcină a traductorului. Aceste valori servesc pentru alegerea corespunzătoare a echipamentelor care se conectează semnalul de ieşire din traductor. În cazul traductoarelor modulare, scala de ieşire este determinată de valoarea tensiunii de alimentare.
Rezistenţa de ieşire, reprezintă rezistenţa electrică măsurată la bornele de ieşire ale traductorului. Valoarea acesteia prezintă importanţă pentru a asigura compatibilitatea cu echipamentul la care se conectează traductorul.
Tensiunea electrică de alimentare a traductorului este specifică traductoarelor modulare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
31
Histerezisul reprezintă diferenţa maximă dintre mărimile electrice de ieşire corespunzătoare aceleiaşi sarcini aplicate mai întâi crescător şi apoi descrescător, în domeniul de funcţionare al traductorului.
Sensibilitatea la condiţiile de mediu caracterizează variaţia caracteristicilor traductorului sub acţiunea diferiţilor factori de mediu: temperatură; umiditate; presiune hidrostatică; câmpuri electromagnetice; zgomot; etc.
Rigiditatea traductorului, reprezintă raportul dintre forţa aplicată şi deplasarea pe direcţia de acţiune a forţei. Această caracteristică prezintă importanţă pentru traductoarele care sunt ataşate sistemelor mecanice, deoarece provoacă schimbări a comportării dinamice a acestora. Rigiditatea traductoarelor trebuie să fie foarte mare în comparaţie cu sistemul atunci când acesta este montat în serie (la măsurarea forţelor, momentelor, presiunilor) şi trebuie să fie neglijabilă la montarea în paralel (la măsurarea deplasărilor).
Dimensiunile de gabarit şi masa traductorului determină posibilitatea utilizării traductorului din punct de vedere al ataşării la locul măsurării, cât şi al influenţării sistemului căruia i se efectuează măsurătorile.
Alegerea traductoarelor se face în baza caracteristicilor enumerate mai sus şi a cerinţelor impuse de condiţiile concrete în care se face cercetarea experimentală, astfel încât să fi atins scopul cercetării experimentale. În acelaşi timp trebuie asigurată compatibilitatea între componentele lanţului de măsură. La luarea deciziei privind alegerea tipului de traductor, trebuie avute în vedere în vedere posibilităţile de utilizare corelate cu costurile încercării.
Principalele tipuri de traductoare, caracteristicile lor şi domeniul de utilizare sunt centralizate în tabelul 2.2, iar posibilităţile lor de utilizare sunt prezentate în tabelul 2.3.
Tabelul 2.2
Nr.
Crt
Tipul traductorului/ reprezentarea schematică
Relaţia de
funcţionare
Utilizare Avantaje Dezavantaje
0 1 2 3 4 5
1 Traductor de inducţie cu magnet mobil.
vkU ⋅= Traductor diferenţial pentru vibraţii seismice.
Construcţie simplă; Sensibilitate ridicată; Caracteristică liniară.
2 Traductor de inducţie cu bobină mobilă.
vkU ⋅= Traductor pentru vibraţii seismice; Microfon; Excitator de vibraţii;
Funcţionare sigură.
Domeniu de măsură limitat; Legături electrice mobile.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
32
0 1 2 3 4 5
3 Traductor de inducţie tahogenerator.
ω⋅= kU Tahogene-rator de c.c.; Tahogene-rator de c.a.; Măsurarea vitezei liniare.
Funcţionare sigură; Tensiunea sau frecvenţa proporţională cu turaţia.
Tensiunea conţine un număr mare de armonici; Fiabilitate scăzută a tahogeneratoarele de c.c.
4 Traductor inductiv cu o bobină.
δ⋅≅ kL
pentru
δ<(0,1........ .......0,2)δo
Traductor diferenţial pentru măsurarea deplasărilor de valori foarte mici.
Sensibilitate mare.
Domeniu de măsură foarte mic. Este neliniar.
5 Traductor inductiv diferenţial cu două bobine.
xkL ⋅≅ Traductor diferenţial pentru măsurarea deplasărilor.
Domeniu de măsurare mare.
Este neliniar.
6 Traductor inductiv cu transformator diferenţial.
xkUUU
⋅=
=−
01
0201Traductor de deplasare.
Siguranţă foarte mare în funcţionare.
Domeniu de liniaritate restrâns.
7 Traductor potenţiometric.
α⋅=⋅=kUxkU
Traductor pentru deplasări unghiulare; Traductor de deplasare; Traductor de poziţie.
Simplu; Economic; Poate fi utilizat şi fără amplificare.
8 Traductor de impulsuri cu contact.
Măsurarea vitezelor unghiulare reduse; Înregistrarea regimurilor de funcţionare.
Simplu; Nu necesită amplifcare.
Fiabilitate redusă; Viteză unghiulară limitată.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
33
0 1 2 3 4 5
9 Traductor de impulsuri fără contact.
ω⋅≅ kU Măsurarea vitezei unghiulare.
Este robust, fiabil, sigur în funcţionare, are răspuns liniar.
Nu indică sensul de rotaţie; Tensiunea conţine armonici.
10 Traductor de impulsuri fotoelectric.
Măsurarea vitezei unghiulare; Numărător de rotaţii.
Traductor fără contact; Eroare mică; Răspuns liniar; Domeniu larg de frecvenţă.
Influenţat de lumina parazită.
11 Traductor piezoelectric.
FkE ⋅= Măsurarea forţelor; Măsurarea acceleraţiilor; Măsurarea momentelor; Măsurarea presiunilor; Microfon.
Nu sunt influenţate de câmpurile magnetice; Au domeniu de măsură foarte larg; Sunt liniare pe domeniul de măsurare.
Necesită rezistenţă de izolaţie foarte bună.
12 Traductor tensometric rezistiv cu fir liber.
LL
kRR
Δ=
=Δ
ε
ε
Măsurarea forţelor; Măsurarea presiunilor.
Erori mici; Nu necesită adezivi; Pot fii utilizate la temperaturi ridicate.
Sensibile la variaţii rapide de temperatură.
13 Traductor tensometric rezistiv cu fir sau folie pe suport.
εkRR=
Δ
Măsurarea majorităţii mărimilor mecanice prin intermediul alungirii.
Erori foarte mici; Multiple posibilităţi de utilizare; Funcţionează la frecvenţe mecanice mari.
Sensibilitate foarte mică; Sensibile la umiditate.
14 Traductor tensometric rezistiv cu semiconductoare.
( )tf
kRR
=
=Δ
ε
ε
Construcţia traductoare-lor de sensibilitate ridicată.
Sensibilitate mare; Funcţionează la frecvenţe mecanice mari.
Fragilitate mare; Răspuns neliniar la alungiri mari; Sensibilitate la variaţii de temperatură.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
34
0 1 2 3 4 5 15 Traductor capacitiv cu
distanţă dintre plăci variabilă.
oddC
CΔ
+=
1
1'
Măsurarea deplasărilor; Măsurarea presiunilor.
Sensibilitate foarte mare.
Sensibilitatea variază neliniar cu distanţa dintre plăci.
16 Traductor capacitiv cu suprafaţa plăcilor variabilă.
Lx
CCx =
Măsurarea deplasărilor.
Răspuns liniar. Sensibilitate transversală.
17 Traductor capacitiv cu dielectric deplasabil.
Lxk
CC
tx =
Largi domenii de utilizare.
Răspuns liniar; Sensibilitate transversală redusă.
Tabelul 2.3
Inductiv Tensometric Mărimile măsurate
Reg
imul
de
măs
urar
e
De
indu
cţie
Piez
oele
ctric
Pote
nţio
met
ric
Cu
o bo
bină
C
u do
uă
bobi
ne
Cu
rans
for-
mat
or d
ife-
renţ
ial
Rez
istiv
Cu
sem
i-co
nduc
tor
Cap
aciti
v
De
impu
lsur
i
0 1 2 3 4 5 6 7 8 9 10 11 S CS
Deplasări liniare sau unghiulare
D Viteză liniară
unghiulară Acceleraţie
S CS
Deformaţii
D S CS
Forţe
D

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
35
0 1 2 3 4 5 6 7 8 9 10 11 S CS
Momente de torsiune
D S CS
Presiuni
D
Legendă: - Traductor recomandat pentru măsurare; - Traductor cu utilizare limitată de amplitudine şi de frecvenţă; S – Regim static, f<3 Hz; CS – Regim cvasistatic, 3 Hz<f<25 Hz; D – Regim dinamic, f>25 Hz.
Tabelul 2.4
Convertoare mecanice-mecanice Tipul convertorului Mărimea de intrare Mărimea de ieşire
Unghi Deplasare Curea dinţată – roată dinţată Deplasare Unghi
Unghi Deplasare Cremalieră – roată dinţată Deplasare Unghi Deplasare Forţă Element elastic plan sau
axial Forţă Deplasare Unghi Forţă (moment) Arc spiral Forţă (moment) Unghi
Datorită faptului că în unele cazuri mărimea neelectrică nu poate fi transformată
direct în mărime electrică sunt situaţii în care aceasta este convertită tot într-o mărime neelectrică în primă fază, după care este transformată într-o mărime electrică măsurabilă. Principalele tipuri de convertoare mecanice-mecanice sunt prezentate în tabelul 2.4. Dintre cele mai utilizate convertoare mecanice-mecanice utilizate la încercarea autovehiculelor pot fi amintite: “roata a 5-a”, în cazul căreia spaţiul parcurs şi viteza de deplasare sunt convertite în deplasare unghiulară, respectiv viteză unghiulară, care la rândul lor sunt convertite şi măsurate pe cale electrică; măsurarea forţelor şi momentelor prin convertirea lor în deormaţii axiale sau unghiulare, care sunt măsurate cu ajutorul traductoarelor rezistive.
2.2.3 Traductoarele de inducţie
Traductoarele de inducţie funcţionează pe principiul inducţiei electromagnetice, ele fiind realizare sub forma generatoarelor de curent electric continuu sau alternativ, cu mişcare de rotaţie sau liniară. Traductoarele de inducţie la care mărimea de intrare este unghiul de rotaţie poartă numele de tahogeneratoare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
36
Schema tahogeneratorului de curent continuu este prezentată în figura 2.2. Principalele elemente componente al acestuia sunt: 1 – magnet permanent; 2 – rotor; 3 – înfăşurare; 4 –colector; 5 – perii. Tensiunea electromotoare de inducţie E, relaţia 2.1, este proporţională cu viteza unghiulară ω, fluxul magnetic inductor Φ şi o constantă K care depinde de caracteristicile constructive ale traductorului.
,Φ⋅⋅= ωkE ( 2.1)
Mărimea de ieşire din traductor – tensiunea electromotoare colectată la perii la funcţionarea în gol – are un caracter pulsatoriu, figura 2.3. Amplitudinea pulsaţiei se reduce prin mărirea numărului de secţiuni ale înfăşurării rotorului şi a numărului de perechi de poli.
Tahogeneratoarele se construiesc pentru turaţii nominale cuprinse între 750 rot/min şi 2000 rot/min, au puteri nominale de 75 – 1000 mW şi au o liniaritate mai bună de 1%. Tensiunea electromotoare în gol este, de obicei, 5 – 30 V.
Principalul neajuns al tahogeneratorului de curent continuu îl constituie colectorul, care limitează funcţionarea la turaţii scăzute şi constituie principalul element de uzură al traductorului. Din acest motiv aria de utilizare a acestui tip de traductor este limitată.
O altă variantă a traductorului de inducţie de curent continuu este traductorul de viteză liniară, figura 2.4. La acesta, tensiunea electromotoare în gol este proporţională cu viteza de deplasare v a solenoidului mobil 2 ,
care este acţionat şi deplasat prin intermediul tijei de legătură 3 în câmpul magnetic generat de magnetul permanent 1, graficul din figura 2.5. Cuplând mecanic tija de legătură cu sistemul mecanic care face obiectul măsurării, se măsoară viteza liniară în punctul de cuplare.
Tahogeeneratorul de curent alternativ, figura 2.6, prezintă avantajul că înfăşurările sunt fixe, iar partea mobilă este constituită de magneţii permanenţi, ne fiind necesare perii şi colectoare.
Fig. 2.2. Tahogeneratorul de curent continuu, schema
de funcţionare.
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
0 1,57 3,14 4,71 6,28
Unghiul de rotaţie [rad]
Tens
iune
a el
ectr
omot
oare
[V]
Fig. 2.3. Tahogeneratorul de curent continuu,
caracteristica de tensiune le mersul în gol.
Fig. 2.4. Traductorul de viteză liniară,
schema de funcţionare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
37
Din acest motiv se îmbunătăţeşte fiabilitatea, se poate ridica turaţia de măsurare şi se micşorează puterea necesară pentru antrenare. Rotorul este realizat sub forma unui magnet permanent cu mai multe perechi de poli, iar statorul este confecţionat din tole prevăzute cu crestături în care se introduce înfăşurarea.
Majorarea numărului de poli permite reducerea turaţiei minime, atunci când măsurarea tensiunii de ieşire se face cu un aparat cu bobină mobilă. Valoarea frecvenţei minime trebuie să fie de 4 la 10 Hz, funcţie de gradul de amortizare al aparatului de măsură.
Liniaritatea dintre turaţia de antrenare a traductorului şi valoarea semnalului de ieşire se obţine numai la funcţionarea în gol şi se înrăutăţeşte odată cu scăderea rezistenţei de sarcină, figura 2.7. Fenomenul se explică prin accentuarea căderii de tensiune la bornele componentei inductive şi a impedanţei interne a traductorului, odată cu creşterea frecvenţei curentului (turaţiei) . Cele trei curbe corespund pentru următoarele valori ale rezistenţelor de sarcină: 10 kΩ curba Ra1; 2 kΩ curba Ra2; 0,5 kΩ curba Ra3.
O altă variantă constructivă o reprezintă tahogeneratorul de curent alternativ cu excitaţie separată, reprezentat schematic în figura 2.8,a (schema de funcţionare) şi 2.8,b circuitul echivalent. În cazul acestei variante constructive statorul 1, are două înfăşurări
separate 2: o înfăşurare de excitaţie, alimentată de un oscilator de audiofrecvenţă cu tensiunea de excitaţie Uex şi o înfăşurare secundară la bornele căreia se obţine semnalul de ieşire Uo, proporţional cu viteza unghiulară măsurată pe axul 3 ω şi un miez 5. Rotorul 4, în formă de pahar se mişcă în câmpul electromagnetic produs de înfăşurarea de excitaţie. Tensiunea electromotoare indusă în secundar Uo va avea frecvenţă egală cu a tensiunii de excitaţie Uex şi amplitudine proporţională cu viteza unghiulară a arborelui de antrenare ω. Tahogeneratoarele care funcţionează după acest principiu prezintă avantajul
Viteza [m/s]
Tens
iune
a el
ectr
omot
oare
[V]
Fig. 2.5. Traductorul de viteză liniară,
caracterstică de funcţiune în gol.
Fig. 2.6. Tahogeneratorul de curent
alternativ
0
10
20
30
40
50
60
70
0 50 100 150 200 250 300
Viteza unghiulară [rad/s]
Tens
iune
a la
bor
nele
trad
ucto
rulu
i [V
]
Ra1 Ra2 Ra3 Fig. 2.7. Variaţia tensiunii electromotoare la
tahometrul de curent alternativ.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
38
extinderii zonei de măsură în zona turaţiilor reduse.
Etalonarea tahogeneratoarelor se face măsurând în paralel viteza unghiulară ω şi
tensiunea electromotoare Uo. Se determină în acest fel curba de etalonare a traductorului şi constanta de transformare a acestuia. Este indicat ca traductorul în general, cel de viteză unghiulară în particular să fie etalonat în cadrul lanţului de măsură.
Pentru măsurarea vitezei unghiulare trebuie selectată metoda şi echipamentul care asigură precizia dorită de etalonare. O metodă precisă şi relativ simplă de etalonare a tahogeneratoarelor constă în utilizarea unui stroboscop. Se antrenează arborele traductorului de viteză unghiulară cu un o instalaţie care permite modificarea turaţiei de antrenare în întreg domeniul de utilizare al traductorului. Menţinând constantă turaţia de antrenare, se iluminează cu lampa stroboscopică arborele tahogeneratorului, sau altă piesă care se roteşte cu aceiaşi viteză unghiulară şi se modifică frecvenţa de lucru a lămpii stroboscopice până imaginea piesei apare liniară. Între frecvenţa de lucru a lămpii stroboscopice şi viteza unghiulară de antrenare a traductorului există următoarea dependenţă:
strνπω ⋅⋅= 2 ( 2.2)
unde: ω este viteza unghiulară de antrenare a traductorului; νstr este frecvenţa de iluminare a stroboscopului.
Concomitent se măsoară valoarea mărimii de ieşire a traductorului Uo şi se stabileşte constanta de calibrare a traductorului.
În cazul traductoarelor de inducţie pentru viteză liniară calibrarea se face prin acţionarea acestuia cu ajutorul unui excitator de vibraţii care se deplasează după o lege
Fig. 2.8. Tahogeneratorul de curent alternativ, cu excitaţie separată: a – schema de funcţionare; b –
circuitul echivalent.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
39
sinusoidală cunoscută. Viteza determinată pe cale analitică v, se compară cu valoarea tensiunii de ieşire Uo şi se stabileşte constanta de calibrare a traductorului.
2.2.4 Traductoare inductive Traductoarele inductive se bazează în funcţionarea lor pe variaţia inductivităţii
proprii a unei bobine cu miez de fier sau pe variaţia inductivităţii mutuale, sub acţiunea mărimii de măsurat. Din punct de vedere constructiv se cunosc următoarele tipuri de traductoare inductive: traductoare inductive cu întrefier variabil; traductoare inductive de tip transformator; traductoare inductive cu miez mobil.
Traductoarele inductive cu întrefier variabil, prezentate schematic în figura 2.9,a,
au în componenţă un miez fix 1 pe care se găseşte o bobină 2 şi un miez mobil (armătură mobilă) 3 care se deplasează în faţa miezului fix sub acţiunea mărimii neelectrice de măsurat.
Inductanţa L a bobinei se modifică funcţie de valoarea întrefierului δ, obţinându-se o caracteristică de conversie de formă hiperbolică ca cea din figura 2.9,b. În acest caz valoarea inductanţei este dată de relaţia:
[H], 2
mRNL = ( 2.3)
unde: N este numărul de spire; Rm reluctanţa circuitului magnetic. Reluctanţa poate fi exprimată cu ajutorul relaţiei:
[1/H] 2104
19 ⎟
⎟⎠
⎞⎜⎜⎝
⎛ ⋅+
⋅⋅⋅= −
aff
fm AA
lR δ
μπ, ( 2.4)
Fig. 2.9. Traductorul inductive cu bobină simplă: a) schema de funcţionare; b) caracteristica de
conversie.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
40
în care: lf este lungimea circuitului în fier, în cm; δ-este valoarea întrefierului, în cm; Af-aria secţiunii miezului de fier, în cm2; Aa- aria întrefierului, în cm2; μf-permeabilitatea relativă a miezului de fier. Pentru deplasări reduse ale întrefierului ∆δ=(0,1.....0,2)δ0 caracteristica traductorului este satisfăcătoare, abaterea de la liniaritate fiind cuprinsă între 1% şi 5%.
Pentru îmbunătăţirea liniarităţii şi pentru lărgirea domeniului de măsurare se utilizează traductoarele construite după schema diferenţială, figura 2.10, care pot fi realizate prin legarea în punte a două inductanţe.
În montaj diferenţial bobinele au un număr de spire egale N1=N2=N,
acestea sunt introduse într-o punte alimentată cu o tensiunea alternativă Ua de frecvenţă f, în mod uzual 5 kHz. Tensiunea de dezechilibru Ud se obţine cu relaţia:
ω⋅Δ⋅⋅⋅⋅≈ LRUkU apd 2 ( 2.5)
unde: kp factor de proporţionelitate care depinde de puntea de măsură; Ua amplitudinea
tensiunii de alimentare; R rezistenţa din cele două braţe ale punţii; ∆L variaţia inductanţei L, care este datorată modificării întrefierului δ; ω este pulsaţia tensiunii de alimentare a punţii.
Din analiza relaţiei (2.5) se constată că în cazul traductoarelor inductive diferenţiale se dublează sensibilitatea şi se măreşte domeniul de liniaritate. În figura 2.11 este reprezentată grafic caracteristica traductorului inductiv simplu împreună cu caracteristica statică a traductorului inductiv cu întrefier variabil în montaj diferenţial.
În mod uzual domeniul de măsură pentru acest tip de traductoare este de ordinul milimetrilor. Pentru a obţine un optim între sensibilitate bună şi liniaritate bună, domeniul de variaţie al întrefierului δ trebuie să fie limital la domeniul δ∈[δo +/-(0,3.........0,4) δo].
Fig. 2.10. Traductorul inductiv, diferenţial.
Fig. 2.11. Caracteristica traductorului
diferenţial

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
41
Traductorul inductiv de tip transformator, are ca elemente sensibile două înfăşurări montate pe un miez de fier, care au o inductanţă variabilă sub acţiunea mărimii neelectrice de măsurat. Scema de principiu a unui astfel de traductor este prezentată în
figura 2.12. Înfăşurarea N1 este alimentată de la o sursă de tensiune alternativă Ua, iar prin deplasarea armăturii mobile a traductorului se modifică întrefierul δ, acesta determinând apariţia unei tensiuni Ue datorită fenomenului de inducţie magnetică:
axe UnkU ⋅⋅= ( 2.6) unde: n=N1/N2 este raportul numărului de spire al celor două înfăşurări; kx coeficientul de cuplaj al cărei valoare depinde de construcţia circuitului magnetic al sistemului şi de mărimea de măsurat.
Avantajul principal al traductoarelor inductive de tip transformator constă în faptul că la ieşire furnizează direct o tensiune alternativă, fără a mai fi necesară introducerea traductoarelor într-un circuit de măsurare separat.
Traductoarele inductive cu miez mobil, în variantă simplă, figura 2.13, este construit
dintr-o bobină 1 în interiorul căreia se deplasează un miez feromagnetic 2 sub acţiunea mărimii de măsurat. Variaţia inductanţei L funcţie de deplasarea x este reprezentată în graficul din figura 2.14. Se constată că acesta este neliniară. De asemenea în cazul acestui tip de traductor se exercită şi o forţă de atracţie asupra miezului.
Varianta diferentială a traductorului inductiv cu miez mobil, figura 2.15,
îmbunătăţeşte simţitor performanţele referitoare la sensibilitate şi la liniaritate şi elimină neajunsul forţelor magnetice parazite.
Fig. 2.12. Traductorul inductiv de tip
transformator.
Fig. 2.13. Traductorul inductiv cu miez mobil.
Fig. 2.14. Caracteristica traductorului inductiv cu
miez mobil.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
42
Elementul sensibil al traductorului este format din două bobine L1 şi L2, care au sensuri de înfăşurare diferite şi sunt conectate într-o punte de alimentare în curent de înaltă frecvenţă. Ca urmare a variaţiei mărimii de intrare se produce deplasarea x a miezului mobil 1, care conduce la modificarea celor două inductanţe în sens invers, conform curbelor L1 şi L2 din diagrama din figura 2.15. Inductanţa traductorului L rezultă ca sumă algebrică a celor două inductanţe. Se observă că domeniul de liniaritate se măreşte considerabil, ocupând o poziţie simetrică în raport cu p0ziţia centrală a miezului mobil. Funcţie de caracteristicile constructive traductoarele inductive cu miez mobil şi cu bobină diferenţială pot fi folosite pentru măsurarea deplasărilor cuprinse între zecimi de mm până la sute de mm.
Traductorul inductiv cu miez mobil de tip transformator diferenţial, figura 2.16,a, se foloseşte ca traductor de deplasare liniară sau unghiulară. Prin modificarea poziţiei miezului mobil se schimbă factorul de cuplaj dintre primarul transformatorului şi secundarul acestuia. Alimentând primarul cu curent alternativ de pulsaţie ω, în secundar vor fi induse tensiunile U01 şi U02, ce pot fi reprezentate prin vectori rotativi ca în figura 2.16,b. Tensiune electomotoare la bornele secundarului U0, se calculează ca
Fig. 2.15. Traductorul inductiv cu miez mobil şi bobine diferenţiale.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
43
sumă a tensiunilor U01 şi U02 din cele două înfăşurări ale secundarului. La rândul lor aceste depind de factorii de cuplaj M1 şi M2, corespunzători unei anumite poziţii a miezului mobil, şi se exprimă prin relaţii de forma:
. ; 202101 dtdi
MUdtdi
MU pp ⋅=⋅= ( 2.7)
Tensiunea la ieşirea din traductor depinde de poziţia miezului mobil 1, datorită modificării factorilor de cuplaj, poziţiei din mijloc corespunzându-i tensiune egală cu zero. Pentru calculul acesteia se foloseşte formula:
( )dtdi
MMUUU p⋅−=−= 2102010 . ( 2.8)
Conform caracteristicii de conversie a transformatorului diferenţial, figura 2.17, domeniul de liniaritate al acestuia este cuprins
între valorile xmin şi xmax ale mărimii măsurate, fiind simetric în raport cu poziţia mediană. Pentru traductoarele de cursă valorile uzuale ale domeniului de măsurare cu o eroare
Fig. 2.17. Caracteristica transformatorului
diferenţial.
Fig. 2.16. Transformatorul diferenţial.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
44
de neliniaritate de maxim 5% sunt ±(0,10-80 mm), iar pentru cele de deplasare unghulară de ± 60o. Înfăşurarea de excitaţie a traductorului este alimentată cu tensiuni de 3 – 15 V la frecvenţe de 50 – 20.000 Hz. Frecvenţele joase se folosesc pentru măsurarea deplasărilor liniare şi unghiulare cu variaţie lentă în timp, iar cele ridicate pentru cele cu variaţie rapidă în timp, deoarece odată cu creşterea frecvenţei de alimentare se îmbunătăţeşte răspunsul în frecvenţă al traductorului.
Transformatorul diferenţial 1, funcţionează pe principiul echipamentelor modulatoare de undă purtătoare şi se conectează în scheme de măsurare similare cu cea din figura 2. 18, care cuprind: amplificatorul de curent alternativ 2; demodulatorul 3; filtrul 4 şi voltmetrul 5. Mărimea de ieşire din filtru este înfăşurătoarea undei purtătoare modulate.
În tabelul 2.5 sunt prezentate caracteristici principale ale unor traductoarelor înductive produse de firma Hottinger Baldwin din R.F. Germania.
Tabelul 2.5
Tipul Modelul Domeniu de măsurare [mm]
Tipul legăturii
Sensibilitatea [mV/V]
Abaterea de la liniaritate [%]
Clasa de protecţie
WAT cu palpator 0...2 – 0...100 jumătate de punte şi punte întreagă
+ 80 +/-0,2 la +/-0,1 IP67(IP54)
WAL - 0...2 – 0...500 jumătate de punte şi punte întreagă
+ 80 +/-0,2 la +/-0,1 IP67(IP54)
WET cu palpator +/-1; +/-5 jumătate de punte
+/-10 <0,3/0,9 IP64
W1EL/0 - +/-1 jumătate de punte
+/-80 +/-0,2 IP20
WI cu palpator 2; 5; 10; jumătate de punte
+/-40 +/-0,2 IP67
WE - 10; 20; 50; 100 jumătate de punte şi punte întreagă
+ 80 +/-0,2 IP67(IP54)
Fig. 2.18. Schema lanţului de măsurare cu transformator diferenţial.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
45
Etalonarea traductoarelor inductive se face pe dispozitive speciale care permit măsurarea deplasărilor liniare sau unghiulare cu precizia necesară. Cuplând traductorul inductiv la dispozitiv se măsoară mărimea electrică de ieşire, corespunzătoare fiecărei valori a deplasării, se trasează punct cu punct, întreaga curbă de etalonare. Reglarea constantei de conversie se poate face prin modificarea tensiunii de alimentare a traductorului, fără a depăşi însă limita impură de condiţia de încălzire.
2.2.5 Traductoare potenţiometrice Traductorul potenţiometric este format dintr-o rezistenţă electrică uniform
repartizată pe un suport în lungul căruia poate culisa un cursor aflat în contact perfect cu rezistenţa. Cursorul traductorului este cuplat mecanic la obiectul de măsură, care prin acţiunea lui îi modifică poziţia. Mărimea de intrare în traductor poate fi o deplasare liniară sau o deplasare unghiulară.
Condiţiile necesare pentru ca un potenţiometru să poată fi utilizat ca traductor sunt: rezistivitatea acestuia să fie cât mai uniform repartizată în lungul elementului rezistent; rezistenţa de contact dintre cursor şi elementul rezistent să aibă valori cât mai reduse şi să fie constantă în timpul funcţionării; variaţia rezistivităţii cu temperatura să fie cât mai redusă.
Potenţiometrele care îndeplinesc cel mai bine aceste cerinţe sunt potenţiometrele cu fir, cu peliculă metalică şi cu peliculă de carbon.
Schemele de principiu ale traductoarelor potenţiometrice sunt prezentate în figura 2.19, respectiv în figura 2.19, a este prezentat traductorul potenţiometric liniar, iar în figura 2.19, b traductorul potenţiometric de rotaţie. În paralel sunt prezentate caracteristicile tensiunii de ieşire în gol Uo funcţie de deplasarea liniară x, respectiv unghiulară α. Această schemă de legare a traductorului prezintă următoarele dezavantaje: sensibilitate la variaţii de temperatură; imposibilitatea
reglării nivelului de zero. Pentru eliminarea acestor dezavantaje în practica se recomandă utilizarea unor
traductoare potenţiometrice legate în punte, ca cel prezentat în figura 2.20. În paralel se conectează potenţiometrul Re, cu ajutorul căruia se echilibrează puntea. Rezistenţa de sarcină Rs are rolul de a limita curentul care trece prin contactele cursorului
Fig. 2.19. Schema de funcţionare a traductoarelor
potenţiometrice: a) liniare; b) de rotaţie.
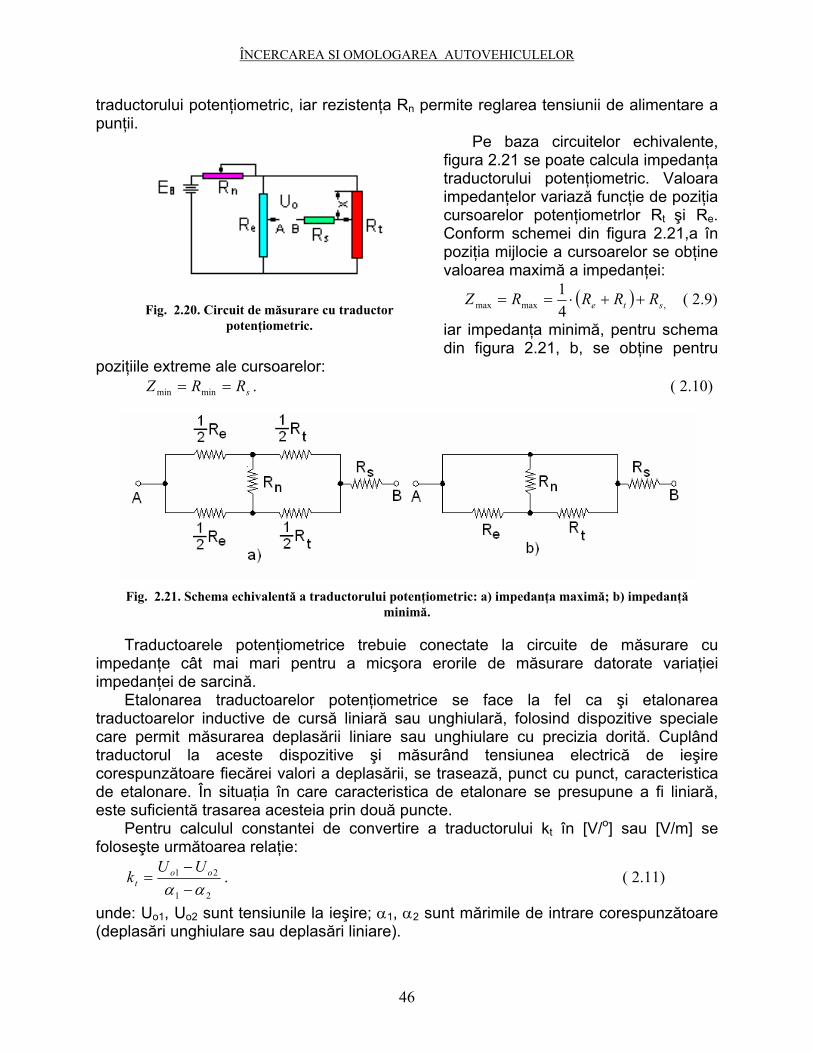
ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
46
traductorului potenţiometric, iar rezistenţa Rn permite reglarea tensiunii de alimentare a punţii.
Pe baza circuitelor echivalente, figura 2.21 se poate calcula impedanţa traductorului potenţiometric. Valoara impedanţelor variază funcţie de poziţia cursoarelor potenţiometrlor Rt şi Re. Conform schemei din figura 2.21,a în poziţia mijlocie a cursoarelor se obţine valoarea maximă a impedanţei:
( ) ,maxmax 41
ste RRRRZ ++⋅== ( 2.9)
iar impedanţa minimă, pentru schema din figura 2.21, b, se obţine pentru
poziţiile extreme ale cursoarelor: sRRZ == minmin . ( 2.10)
Traductoarele potenţiometrice trebuie conectate la circuite de măsurare cu impedanţe cât mai mari pentru a micşora erorile de măsurare datorate variaţiei impedanţei de sarcină.
Etalonarea traductoarelor potenţiometrice se face la fel ca şi etalonarea traductoarelor inductive de cursă liniară sau unghiulară, folosind dispozitive speciale care permit măsurarea deplasării liniare sau unghiulare cu precizia dorită. Cuplând traductorul la aceste dispozitive şi măsurând tensiunea electrică de ieşire corespunzătoare fiecărei valori a deplasării, se trasează, punct cu punct, caracteristica de etalonare. În situaţia în care caracteristica de etalonare se presupune a fi liniară, este suficientă trasarea acesteia prin două puncte.
Pentru calculul constantei de convertire a traductorului kt în [V/o] sau [V/m] se foloseşte următoarea relaţie:
21
21
αα −−
= oot
UUk . ( 2.11)
unde: Uo1, Uo2 sunt tensiunile la ieşire; α1, α2 sunt mărimile de intrare corespunzătoare (deplasări unghiulare sau deplasări liniare).
Fig. 2.20. Circuit de măsurare cu traductor
potenţiometric.
Fig. 2.21. Schema echivalentă a traductorului potenţiometric: a) impedanţa maximă; b) impedanţă
minimă.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
47
Traductoarele potenţiometrice sunt simple, robuste şi sigure în funcţionare. Datorită semnalul de ieşire care are o valoare suficient de mare, nu este necesară utilizarea amplificatoarelor şi nu sunt afectate de zgomotele electrice. Datorită acestor avantaje traductoarele potenţiometrice sunt utilizate pe scară largă la măsurarea deplasărilor liniare şi unghiulare.
Pentru a îmbunătăţi precizia rezultatelor obţinute cu acest tip de traductoare trebuie să se ţină seama de următoarele particularităţi:
traductoarele potenţiometrice bobinate nu pot fi folosite la măsurarea deplasărilor mici, datorită faptului că pasul dintre spire nu poate fi micşorat sub 0,02-0,05 mm;
contactul mecanic între cursor şi rezistenţa mecanică influenţează în mod negativ fiabilitatea traductorului;
durabilitate se micşorează considerabil atunci când mişcarea de rotaţie este alternativă;
uzura traductorului face să crească nivelul de zgomot electric produs de acesta; răspunsul în frecvenţă al traductorului este limitat, datorită forţelor de inerţie şi de
frecare din sistemul mecanic, iar nivelul de zgomot electric generat de contactul mobil creşte odată cu creşterea vitezei de deplasare. Se recomandă limitarea vitezei liniare dintre cursor şi rezistenţa electrică la maxim 3 m/s.
Conectând două sau mai multe traductoare potenţiometrice înţr-o singură punte de măsură pot fi efectuate măsurători complexe prin însumarea sau scăderea semnalelor. Caracteristicile traductoarelor potenţiometrice fac ca acestea să fie foarte des utilizate la încercarea autovehiculelor pentru măsurarea deplasărilor liniare sau unghiulare ale elementelor de comandă: volan; pedale; etc.
2.2.6 Traductoare de impulsuri În cazul traductoarelor de impulsuri mărimea de intrare, deplasarealiniară sau
unghiulară, este transformată în impulsuri electrice. Impulsurile deformă dreptunghiulară sunt cele mai utilizate deoarece prezintă avantajul obţinerii unei precizii ridicate. În cazul în care semnalul de ieşire din traductor diferă de această formă, acesta poate fi adus la forma dreptunghiulară cu ajutorul unor circuite electronice speciale, numite circuite de formare. În unele cazuri, pentru a sesiza imediat momentul în care se defectează traductorul de impulsuri, formarea acestora se face astfel încât ambele ramuri de tensiune constantă ale semnalului dreptunghiular să aibă tensiuni diferite de zero. În felul acesta informaţia de tensiune egală cu zero înseamnă numai traductor defect şi nu poate fi confundată cu lipsa mişcării. Proporţionalitatea dintre număr de impulsuri şi deplasărilor unghiulară sau liniară asigură liniaritatea caracteristicii de conversie.
După modul în care sunt obţinute impulsurile, traductoarele pot fi împărţite în două grupe:
traductoare de impulsuri cu contact; traductoare de impulsuri fără contact.
Traductoare de impulsuri cu contact produc impulsurile electrice prin închiderea şi
deschiderea unăr contacte electrice comandate de un sistem mecanic antrenat datorită deplasării ce urmează să fie măsurată. În figura 2.22 este prezentat un traductor de

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
48
impulsuri cu contact pentru măsurarea deplasărilor unghiulare. Mărimea neelectrică comandă cursorul 1, care se deplasează pe contactele de pe discul 2, închizând pe rând circuitele numărătoarelor de impulsuri A, B, C, D, E, F, G şi H. Fiecărui impuls electric îi corespunde o deplasare unghiulară ∆a. Numărătoarele de impulsuri oferă informaţia privind distribuţia pe clase a deplasărilor în domeniul de măsurare a traductorului +/-amax. Datorită contactelor mecanice aceste traductoare au o fiabilitate redusă comparativ cu traductoarele fără contact şi se utilizează numai pentru măsurarea deplasărilor cu viteze reduse, cum sunt: deplasarea pedalelor, deplasarea clapetei de acceleraţie, deplasarea volanului, ş.a.
Pentru eliminarea dezavantajelor traductoarelor de impulsuri cu contact se utilizează traductoare de impulsuri fără contact de inducţie, figura 2.23, sau fotoelectrice, figura 2.24.
Fig. 2.22. Traductor de impulsuri cu contact.
Fig. 2.23. Traductor de impulsuri fără contact de inducţie.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
49
În cazul traductoarelor de impulsuri fără contact de inducţie, figura 2.23, generarea impulsurilor se face prin variaţia câmpului magnetic al bobinei 1, la deplasarea prin dreptul miezului magnetic al unui disc 2, prevăzut cu creneluri. Forma danturii prelucrate în discul 2 influenţează forma semnalului la ieşirea din traductor, I, iar viteza unghiulară w este proporţională cu amplitudinea acestuia. Circuitul electric de formare 3, transformă semnalul I într-un semnal dreptunghiulat de forma II. Semnalul de tip treaptă poate fi prelucrat mult mai uşor cu ajutorul blocului de numărare 4, sau pe cale electrică, obţinându-se mărimile derivate viteză, acceleraţie, etc. Frecvenţa minimă inferioară este limitată de scăderea amplitudinii impulsului electric, neajuns care poate fi parţial remediat prin mărirea numărului de caneluri. Frecvenţa maximă este şi ea limitată de caracteristicile numărătorului, în principal de timpul de eşantionare la care lucrează acesta, deoarece frecvenţa de eşantionare trebuie să fie de cel puţin două ori mai mare decât frecvenţa semnalului prelucrat. Prin urmare pe lângă limitarea geometrică privind posibilitatea de mărire a numărului de caneluri mai intervine şi o limitare datorată lanţului de măsură şi caracteristicilor mărimii de măsurat.
În cazul traductoarelor de impulsuri fotoelectrice, figura 2.24, obţinerea impulsurilor se realizează cu ajutorul fototranzistorului 3, al sursei de lumină 1 şi al discului cu fante 2, cu ajutorul căruia este întrerupt fluxul de lumină. Semnalul de ieşire din traductor, care are formă trapezoidală poate fi folosit direct pentru comanda numărătorului de impulsuri 4. Fototranzistorul este caracterizat printr-un timp de răspuns foarte redus 1,5μs - 8μs, motiv pentru care domeniul de măsurare poate fi extins mult în comparaţie cu traductorul de impulsuri fără contact de inducţie. Dacă se au în vedere şi posibilităţile moderne de prelucrare a discurilor 2, domeniul de măsurare este limitat doar de
Fig. 2.24. Traductor de impulsuri fără contact optic.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
50
frecvenţa de eşantionare a numărătorului, de domeniul de variaţie al mărimii măsurate şi de caracteristica de conversie a traductorului. Prin utilizarea altor elemente fotovoltaice sau fotorezistente, în locul fototranzistorului, se pot obţine alte traductoare de impulsuri, care, datorită timpului de răspuns mai mare al elementului de comandă, coboară considerabil frecvenţa superioară de lucru a traductorului.
Datorită faptului că amplitudinea semnalului la ieşirea din traductor rămâne practic constantă (aproximativ egală cu tensiunea de alimentare a traductorului) acest tip de traductor poate fi utilizat şi când frecvenţa semnalului este foarte mică.
Ca dezavantaj principal al traductoarelor de impulsuri fotoelectrice trebuie menţionată necesitatea izolării foarte bune de influenţa luminii din mediul exterior, care ar putea influenţa negativ rezultatele încercărilor.
Traductoarele de impulsuri pot fi utilizate cu uşurinţă şi pentru măsurarea deplasărilor liniare sau a altor mărimi care pot fi convertite pe cale mecanică în deplasare. În cazul autovehiculelor, ele sunt utilizate în mod curent pentru măsurarea spaţiului, vitezei şi acceleraţiei, precum şi pentru măsurarea vitezelor unghiulareale diferitelor componente aflate în mişcare de rotaţie.
În concluzie se poate aprecia că traductoarele de impulsuri, în special cele fără contact, asigură o precizie ridicată a măsurătorilor, şi permit o prelucrare uşoară a semnalului în mod direct şi pe cale electrică.
2.2.7 Traductoare piezoelectrice Principiul de funcţionare al traductorului piezoelectric se bazează pe proprietatea
unor materiale cristaline de a produce sarcini electrice atunci când sunt solicitate mecanic. Sarcina electrică este proporţională cu solicitarea mecanică normală sau tangenţială, iar semnul acesteia se schimbă odată cu schimbarea sensului. Această proprietate o au anumite materiale monocristaline naturale cum sunt: tartratul de sodiu; tartratul de potasiu; turmalina şi cuarţul. În ultima perioadă aceste materiale au fost înlocuite cu materiale artificiale policristaline monocristaline sau policristaline şi ceramice feroelectrice polarizate. Materialele artificiale prezintă marele avantaj că, prin dirijarea procesului de fabricaţie se poate avea un control riguros asupra calităţii şi a proprietăţilor piezoelectrice. De asemenea acestea se pot fabrica în forma dorită şi stabilitatea lor termică este mult mai ridicată.
Principalele proprietăţi ale materialelor piezoelectrice utilizate în construcţia traductoarelor sunt:
constanta piezoelectrică Kp, definită prin raportul dintre sarcina electrică generată Q şi forţa aplicată F;
rigiditatea, exprimată în N/m, care influenţează valoarea frecvenţei proprii de oscilaţie a traductorului;
permitivitatea relativă, care influenţează capacitatea traductorului; rezistenţa electrică care influenţează mărimea curentului de scurgere; punctul Curie, care este punctul de la care se pierde ireversabilitatea
transformărilor piezoelectrice. În tabelul 2.6. sunt centralizate caracteristicile unor materiale piezoelectrice utilizate
mai frecvent.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
51
Tabelul 2.6
Materialul piezoelectric Punctul Curie oC
Constanta piezoelectrică
pC/N
Permitivitatea relativă r
Firma producătoare
Cuarţ 300 2 4 Bruel&Kjaer
PZ 23 (plumb-titana-zirconat)
350 270
1500 Bruel&Kjaer
PZ 45, ceramic (bismut-stronţiu-titan)
>500 16 165 Bruel&Kjaer
P 1-60 351 400 1500 Quartz&Silice
Casonic Grade 3 120 83 1000 Plessey
Schema de principiu a traductorului piezoelectric este reprezentată schematic în figura 2.25, a, iar schema electrică echivalentă în figura 2.25, b. Valorile uzuale ale rezistenţei electrice sunt Rt ≅ 2•1010 Ω, iar cele ale capacităţii traductorului sunt Ct≅ 2•10-14 F (farad 1F=1C/V).
În timpul solicitării mecanice normale de tracţiune/compresiune Fσ, sau a solicitării tangenţiale de forfecare Fτ, materialul piezoelectric se comportă la fel ca un condensator încărcat cu o sarcină electrică proporţională cu forţa aplicată. Chiar dacă rezistenţa Rt este foarte mare, ea permite să apară un curent electric de scurgere, care are ca efect descărcarea condensatorului echivalent. Aceasta face ca traductoarele piezoelectrice să nu poată fi utilizate pentru măsurători statice. Cu cât frecvenţa mărimii neelectrice măsurate este mai mică, cu atât efectul curentului de scurgere asupra erorii de măsură este mai ridicat.
Prin conectarea traductorului la circuitul de măsurare, de impedanţă dată, acest
fenomen se accentuează. Pentru extinderea domeniului de măsurare spre domeniul frecvenţelor joase, impedanţa circuitului de măsurare trebuie să fie cât mai mare. Deoarece la amplificatoarele de tensiune de construcţie actuală rezistenţa la intrare
Fig. 2.25. Traductorul piezoelectric: a – schema funcţională; b – schema electrică echivalentă.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
52
poate ajunge la 3000 MΩ, iar frecvenţa limită inferioară coboară până la valori de aproximativ 1 Hz, care corespunde principalelor cerinţe de măsurare a fenomenelor dinamice lente. De asemenea un alt dezavantaj este datorat faptului că capacitatea cablului de legătură al traductorului influenţează semnificativ sensibilitatea de măsurare, motiv pentru care se impun corecţii atunci când se schimbă cablul.
Dezavantajul mai sus menţionat se elimină utilizând amplificatoarele de sarcină, care datorită rapoartelor de amplificare ridicate a>1000 şi a impedanţelor de intrare foarte mari, care ajung în unele cazuri până la 10 GΩ, fac ca limita inferioară de frecvenţă a semnalului de intrare să coboare până la 0,003 Hz.
Calităţile pe care le au traductoarele piezoelectrice, sensibilitate ridicată, rigiditate mare, posibilitate de miniaturizare, etc., au făcut ca traductoarele piezoelectrice să fie utilizate în special pentru măsurarea vibraţiilor, ca traductoare de acceleraţie. Ele mai pot fi folosite ca traductoare de presiune sau ca traductoare de forţă.
Traductorul pentru măsurarea acceleraţiilor figura 2.26, se compune dintr-o masă seismică 2, montată deasupra elementului piezoelectric 4, prin intermediul pivotului de strângere 6, care realizează legătura cu baza de fixare 1. Aceasta este prevăzută cu un sistem de fixare a traductorului pe piesa de măsurat 7. Forţa de prestrângere dintre componentele accelerometrului este asigurată de elementul elastic 3. În timpul măsurătorilor, forţa de inerţie a masei elastice se transmite elementului piezoelectric şi este convertită în semnal electric care este preluat în circuitul de măsură prin intermediul mufei de legătură 5. Pentru frecvenţe sub frecvenţa de rezonanţă, acceleraţia masei seismice va fi egală cu acceleraţia bazei traductorului, iar amplitudinea semnalului electric va fi proporţională cu acceleraţia sistemului.
Traductoarele de acceleraţie piezoelectrice sunt realizate în două variante constructive:
Fig. 2.26. Traductor piezoelectric de acceleraţie : a – schema de principiu; b – schema traductorului
de compresie; c – schema traductorului de forfecare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
53
tip compresie, figura 2.26, b, la care masa seismică exercită o forţă de compresiune asupra elementului piezoelectric;
tip forfecare, figura 2.26, c, la care masa seismică exercită o forţă de forfecare asupra elementului piezoelectric. Acest tip de traductoare prezintă o sensibilitate mai ridicată şi sunt mai puţin perturbate de solicitările mecanice transmise prin bază, de acceleraţii care acţionează în direcţie transversală şi au o stabilitate termică mai ridicată.
Traductoarele piezoelectrice de acceleraţie sunt însoţite de fişe tehnice care conţin principalele caracteristici, iar cele de înaltă precizie sunt însoţite şi de diagrame de etalonare cu răspuns în frecvenţă.
Principalele tipuri de traductoare piezoelectrice de acceleraţie şi o parte dintre caracteristicile lor sunt prezentate intuitiv în figura 2.9. Gama uzuală de accelerometre, traductoarele de clasă mică şi mijlocie, satisfac o gamă largă de cerinţe. Acestea au o sensibilitate cuprinsă între 1 şi 10 pC/ms-2. Brüel & Kjær a hotărât să tipizeze aceste traductoare în vederea simplificării calibrării utilizând doar sensibilităţi normalizate de 1 sau de 10 pC/ms-2. Accelerometrele miniaturizate sunt folosite pentru vibraţiile cu frecvenţă sau amplitudine ridicată sau în locuri în care este necesară o greutate mică sau dimensiuni mici. Alte tipuri de traductoare sunt optimizate pentru măsurători de
Fig. 2.27. Tipuri principale de traductoare piezoelectrice.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
54
acceleraţii după trei direcţii perpendiculare 1, pentru măsurători la temperaturi ridicate 2, pentru calibrarea accelerometrelor sau pentru măsurători de înaltă precizie 3, pentru şocuri puternice 4, sau pentru vibraţii cu frecvenţe foarte reduse 5.
Alegerea accelerometrelor piezoelectrice se face în concordanţi cu obiectivele măsurătorii şi cu caracteristicile funcţionale ale sistemului ce urmează a fi măsurat .
Prima caracteristică care trebuie avută în vedere la un accelerometru este sensibilitatea acestuia. Ideal ar fi ca aceasta să fie cât mai mare, dar trebuie făcut un compromis deoarece o sensibilitate ridicată înseamnă dimensiuni şi mase mari ale accelerometrului. În condiţii normale sensibilitatea traductorului piezoelectric nu mai
constituie o problemă critică deoarece preamplificatoarele moderne sunt capabile să preia semnale de nivel foarte scăzut.
Atunci când se măsoară vibraţiile unor obiecte foarte uşoare masa accelerometrelor devine importantă, deoarece adăugarea unei mase suplimentare poate să modifice semnificativ parametrii procesului oscilatoriu: frecvenţa, amplitudinea, etc. Ca regulă de alegere a masei accelerometrului, aceasta nu trebuie să depăşească a zecea parte din masa dinamică a componentei pe care este montat.
În cazul în care trebuie măsurate nivele scăzute sau nivele ridicate de acceleraţie, o caracteristică importantă care trebuie avută în vedere este domeniul dinamic de utilizare al traductorului. Limita inferioară, amin, nu este de obicei determinată de accelerometru, ci de zgomotele electrice din cablul de conexiune al traductorului şi din circuitele amplificatorului. Această limită poate ajunge până la o sutime de m/s2 în cazul în care se folosesc lanţuri de măsură adecvate. Limita superioară, amax, este determinată de tensiunile structurale din elementul piezoelectric al traductorului. În mod obişnuit caracteristica accelerometrului, figura 2.28, este liniară până la valori maxime ale acceleraţiei de 50000 – 100000 m/s2. Accelerometrele concepute special pentru măsurarea şocurilor mecanice pot avea caracteristică liniară până la 1000 km/s2 (100000 g).
Sistemele mecanice au marea majoritate frecvenţe cuprinse între 10 Hz şi 1000Hz, dar măsurătorile sunt adeseori făcute până la 10 kHz deoarece deseori interesează componentele vibraţiilor de frecvenţă ridicată. Prin urmare, trebuie să ne asigurăm, când alegem accelerometrul, că domeniul de frecvenţă al acestuia acoperă integral domeniul de interes pentru încercarea pe care o efectuăm. Forma curbei care redă răspunsul în frecvenţă al unui traductor de acceleţie piezoelectric este reprezentată în figura 2.29. Domeniul de frecvenţă este limitat în partea inferioară de frecvenţa minimă fmin, care în condiţii normale este 1 Hz, şi în partea superioară de frecvenţa maximă fmax, care este determonată de frecvenţa de rezonanţă a traductorului fo. Ca regulă, valoarea superioară a frecvenţei se limitează la 1/3 fo, admiţându-se o eroare maximă de 12%
Fig. 2.28. Domeniul dinamic de utilizate al traductorului piezoelectic de acceleraţie.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
55
(1dB). În cazul accelerometrelor de clasă mică frecvenţa de rezonanţă fo, are valori mari, de aproximativ 180 kHz, iar în cazul accelerometrelor de clasă mare acesta este mult mai mică, valori de 20 – 30 kHz fiind uzuale.
Metoda de fixare a accelerometrului în locul de măsură are o importanţă deosebită pentru obţinerea acurateţii dorite a rezultatelor. Modul de fixare al traductorului trebuie ales în corelaţie cu frecvenţa de rezonaţă a traductorului, determinând frecvenţa de rezonanţă a traductorului montat. Trebuie menţionat faptul că limita superioară a domeniul de utilizare a traductorului se determină
pornind de la frecvenţa de rezonanţă în stare montată.
În figura 2.30, sunt prezentate principalele metode de fixare a accelerometrelor. Valoarea maximă a frecvenţei de rezonanţă a traducctorului montat, 31 kHz, se obţine prin montarea cu şurub pe suprafaţă rectificată, figura 2.30, a. În cazul fixării traductorului cu ceară de albine, figura 2.30, c, frecvenţa de rezonanţă se micşorează foarte puţin ajungând la aproximativ 29 kHz, dar metoda prezintă dezavantajul că nu poate fi utilizată decât până la temperaturi de 40oC. De asemene trebuie avut în vedere faptul că rezistenţa fixării cu ceară este relativ scăzută, şi din acest motiv acceleraţia trebuie limitată la 100 m/s2. Pentru eliminarea acestor inconveniente se poate recurge la fixarea traductorului cu ajutorul unei răşini cianoacrilice sau epoxidice pentru care frecvenţa de rezonanţă este 28 kHz. Fixarea traductorului cu şurub şi şaibă izolatoare
Fig. 2.29. Răspunsul în frecvenţă al traductoarelor
piezoelectice de acceleraţie.
Fig. 2.30. Metode de fixare a traductoarelor piezoelectrice de acceleraţie.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
56
din mică, figura 2.30, b, este utilizată cu precădere când traductorul trebie izolat electric de obiectul de măsură. Această metodă de fixare dă rezultate bune, frecvenţa de rezonanţă a traductorului montat fiind de aproximativ 28 kHz. Utilizarea unui magnet permanent, figura 2.30, d, este o metodă simplă şi eficientă de fixare a traductorului, care asigură o frecvenţă de rezonanţă în stare montată de aproximativ 7 kHz, respectiv o frecvenţă maximă de măsură de 2 kHz şi o acceleraţie maximă de 2000 m/s2. Fixarea accelerometrul cu mâna, utilizând un vârf palpator, figura 2.30, e, deşi este cea mai simplă şi rapidă metodă de fixare, introduce erori datorită faptului că frecvenţa de rezonanţă în stare montată este de 2 kHz, motiv pentru care semnalul trebuie filtrat cu un filtru trece-jos la limita valorii maxime de măsurare care este de aproximativ 1000 Hz.
Dintre condiţiile de mediu, influenţa principală asupra sensibilităţii o are temperatura. Odată cu creşterea temperaturiiare loc o reducere a sensibilităţii traductorului şi o creştere a capacităţii acestuia, figura 2.31. Aceste modificări sunt reversibile dacă temperatura nu depăşeşte punctul Curier specific materialului din care este confecţionat elementul piezoelectric. În cazul în care se fac măsurători la temperaturi ridicate, trebuie luate măsuri de răcire a traductoarelor. Accelerometrele obişnuite funcţionează
până la temperaturi de 250oC, la temperaturi mai mari elementul piezoelectric se depolarizează şi ca urmare sensibilitatea traductorului se va diminiua. Un astfel de traductor poate fi reutilizat după recalibrare. Pentru temperaturi mai mari, până la 400oC, au fost concepute traductoare cu elemente piezoectrice ceramice speciale. În cazul în care traductoarele sunt montate pe suprafeţe a căror temperatură ajunge la 350 – 400oC baza accelerometrului poate fi menţinută la temperaturi sub 250oC prin răcire şi izolare cu mică.
Alte influenţe cu pondere mai mică ale mediului exterior asupra sensibilităţii traductorului piezoelectric sunt produse de: tensiunile din baza de fixare; radiaţiile nucleare; câmpurile magnetice; umiditate; substanţe corozive; zgomote; vibraţii transversale; etc.
Caracteristicile traductorului de acceletraţie se modifică foarte puţin în timp dacă se respectă recomandările de folosire şi păstrare a acestora. Din experienţa folosirii acestui tip de traductoare s-a constatat că după un timp îndelungat de utilizare caracteristicile iniţiale nu s-au modificat cu mai mult de 2%. În practică există şi situaţii în care se impune recalibrarea accelerometrelor. Dintre aceste pot fi enumerate: supraîncărcarea termică prin depăşirea punctului Curie al elementului piezoelectric; supraîncărcarea mecanică prin şocuri şi vibraţii de frecvenţă şi intensitate mai mari decât cele pentru care au fost proiectate traductoarele.
Calibrarea traductoarelor piezoelectrice se face cu ajutorul unui echipament special, care constă într-o masă vibrantă, acţionată electrodinamic, care produce vibraţii cu
Fig. 2.31. Influenţa temperaturii asupra sensibilităţii
şi capacităţii traductoarelor piezoelectice.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
57
acceleraţia de 1 g (9,81 m/s2) la frecvenţă constantă, în mod obişnuit de 80 Hz. Valoarea mărimii de ieşire va corespunde acceleraţiei transmise traductorului pe masa vibrantă. Având în vedere influenţa întregului lanţ de măsură asupra parametrilor măsuraţi se recomandă etalonare întregului lanţ de măsură.
2.2.8 Traductoare tensometrice rezistive Traductoarele tensometrice rezistive, unele dintre cele mai utilizate traductoare în
tehnica măsurătorilor, funcţionează pe principiul variaţiei rezistenţei electrice a unui conductor supus deformaţiei longitudinale. Solicitând cu o forţă de tracţiune un rezistor R1, confecţionat dintr-un fir de constantan, legat într-o punte de măsură, se observă că rezistenţa electrică se modifică variaţia sarcinii longitudinale, figura 2.32. Odată cu anularea solicitării rezistenţa revine la valoarea iniţială. Acest fenomen a fost descoperit la mijlocul secolului XIX de fizicianul englez Wiliam Thomson.
Rezistenţa electrică a unui conductor de secţiune constantă se exprimă cu relaţia:
AlR ⋅= ρ ( 2.12)
unde: r este rezistivitatea; l lungimea firului; A aria secţiunii conductorului.
Prin logaritmarea şi diferenţierea relaţiei 2.12, se obţine:
AdA
ldld
RdR
−+=ρρ , ( 2.13)
care prin exprimarea în variaţie finită a mărimilor devine:
AA
ll
RR Δ
−Δ
+Δ
=Δ
ρρ . ( 2.14)
Dacă în relaţia 2.14 se înlocuieşte ∆l/l=e şi ∆A/A=-2me, în care m este coeficientul lui Poisson, se obţine:
( )μερρ 21+⋅+
Δ=
ΔRR . ( 2.15)
Considerând că rezistivitatea nu se modifică, relaţia 2.15 poate fi aproximată cu:
ε⋅≅Δ kRR , ( 2.16)
în care k este coeficientul de tensosensibilitate al materialului. Valoare coeficientului k, pentru conductoare monofilare obişnuite, este cuprinsă între 2 şi 3. Aceasta depinde de modul de prelucrare al diametrului, de tratamentul termic şi de cel mecanic.
Fig. 2.32. Experiaenţa lui W. Thomson.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
58
Aplicarea în tehinica măsurătorilor mecanice a fenomenului descoperit de W. Thomson s-a focut după aproximativ opt decenii, adică pe la sfârşitul deceniului patru al secolului trecut. Impulsionate de dezvoltarea aparatelor utilizate în lanţurile de măsură, în special a galvanometrelor şi a amplificatoarelor, au apărut şi primele traductoare tensometrice rezistive. În scurt timp acestea au devenit cel mai uzual mijloc de măsurare a tensiunilor mecanice şi componenta de bază din construcţia traductoarelor specializate în măsurarea mărimilor mecanice.
Traductorul tensometric rezistiv simplu, figura 2.33, cu o singură direcţi de măsurare este alcătuit din următoarele părţi componente: reţeaua metalică 2, care reprezintă partea sensibilă a traductorului, suportul necesar pentru fixarea reţelei metalice şi pentru izolarea electrică a acesteia de piesa pe care este fixată; elementul de coneţiune 3, care permite lipirea cablului de măsurare pe traductor, realizându-se circuitul de măsurare. Reţeaua electrică poate fi realizată în două moduri, din sârmă cu diametrul
de 20 – 150 mm, figura 2.33, a, respectiv din folie metalică cu grosime de 3 – 5 mm, figura 2.33, b. Pentru măsurare traductorul se aplică prin lipire cu un adeziv special, pe suprafaţa piesei aflată în stare netensionată. Odată cu solicitarea la care este supusă piesa, aceasta se deformează, concomitent cu aceasta se produce, deformaţia reţelei metalice şi variaţia
rezistenţei electrice a traductorului care este proporţională cu deformaţia. Tabelul 2.7
Material Coeficientul de tensosensibilitate
Rezistenţa specifică [Ωmm2/m]
Coeficientul de variaţie a
rezistenţei cu temperatura
[oC-1]
Tensiunea termoelectrică în
raport cu Cu [mV/oC]
Constantan 60 Cu 40 Ni
2,0 ... 2,1 0,45 .... 0,51 10. 10-6 43
55 Cu Ni 45
2,1 ... 2,4 0,476 10. 10-6 43
Izoelastic 36 Ni 8 Cr 52 Fe 0,5 Mo 3,5 Mn
2,8 ... 3,5 1,11 175. 10-6 22
Aliaj Pt W
4,0 ... 5,0 - - -
Condiţiile pe care trebuie să le îndeplinească materialul din care se confecţionează
reţeaua metalică sunt următoarele: rezistivitate mare cu variaţie liniară, în funcţie de deformaţia mecanică; histerezis redus; coeficient de variaţie a rezistenţei cu temperatura cât mai mic; coeficient de tensosesibilitate cât mai mare; limită de elasticitate cât mai mare; coeficient de dilatare liniară pe cât posibil egal cu al piesei pe care este lipit traductorul. Materialul care îndeplineşte cel mai bine cerinţele impuse este constantanul. Cu toate acestea şi alte materiale se folosesc la construcţia mărcilor
Fig. 2.33. Traductorul tensometric rezistiv simplu.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
59
tensometrice, funcţie de cerinţele impuse în mod prioritar. În tabelul 2.7, sunt centralizate principalele caracteristici ale materialelor folosite la confecionarea traductoarelor tensometrice.
Traductoarele tip folie, brevetate în Anglia în anul 1952, prezintă numeroase avantaje în comparaţie cu cele cu fir datorită grosimii reduse şi a tehnologiei de fabricaţie folosite. Dintre acestea pot fii enumerate următoarele: preiau mai fidel deformaţia piesei; cedează uşor căldura; au caracteristică liniară; sensibilitate scăzută la deformaţii transversale; etc.
Suportul traductoarului se confecţionează din hârtie în cazul traductoarelor cu fir, respectiv din materiale sintetice, răşini epoxidice, acrilice, fenolice, etc., pentru traductoarele cu folie. În cazul traductoarelor pentru temperaturi înalte ca material suport se utilizează fibra de sticlă (<800oC), mică (<1000oC) sau tabla metalică (>1000oC).
Adezivul de fixare a mărcii tensometrice trebuie să fie corelat cu natura suportului, cu baza pe care se fixează traductorul şi cu condiţiile în care se fac măsurătorile.
Pe domeniul de liniaritate a traductorului montat, funcţia de conversie a traductorului este similară cu cea pentru traductorul monofilar, cu excepţia constantei traductorului kt, care are valoare , mai mică decât k:
ε⋅≅Δ
tkRR . ( 2.17)
Dată fiind diversiunea cerinţelor de măsurare s-au construit mai multe tipuri de traductoare, dintre care pot fi amintite: traductoare tensometrice de tip rozetă cu două direcţii de măsurare, figura 2.34, a şi b; traductoare tensometrice de tip rozetă cu trei direcţii de măsurare, figura 2.34, c, d şi e; traductoare tensometrice cu destinaţie specială, 2. 35.
Traductoarele de tip rozetă cu două direcţii de măsurare se folosesc atunci când se cunoaşte direcţia efortului principal şi se urmăreşte creşterea preciziei de măsurare. Rozetele cu reţele orientate la 90o, figura 2.34, a, se folosesc în construcţia traductoarelor atunci când se doreşte compensarea erorii datorate variaţiei de temperatură, iar rozetele cu relele orientate la 45o faţă de axa de simetrie, figura 2.34, b, se folosesc pentru măsurarea solicitărilor de torsiune ale arborilor.
Traductoarele tensometrice rezistive de tip rozetă cu trei direcţii de măsurare, se utilizează pentru măsurarea stării plane de solicitare atunci când nu se cunoaşte direcţia pincipală de solicitare, figura 2.34, c şi d şi pentru măsurarea tensiunilor remanente figura 2.34, e.
Fig. 2.34. Traductoare tensometrice tip rozetă.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
60
Traductoarele tensometrice cu destinaţie specială, figura 2.35, au o formă particulară în funcţie de scopul în care au fost proiectate. Spre exemplu: pentru mărirea valorii constantei traductorului se foloseşte varianta cu patru reţele dispuse la 90o legate în punte, prezentată în figura 2.35, a; pentru măsurarea solicitărilor compuse, tangenţiale şi radiale a membranelor subţiri se folosesc mărci tesometrice ca cele din figura 2.35, b; atunci când gradientul deformaţiilor specifice în lungul direcţiei de măsurat nu este constant se utilizează traductori tensometrici multipli în lanţ, figura 2.35, c, d şi e; pentru punerea în evidenţă a vitezei de propagare a fisurilor se folosesc mărci tensometrice ca cele din figura 2.35, f.
Indiferent de tipul constructiv şi de calităţile acestora traductoarele tensometrice rezistive sunt caracterizate prin următoarele caracteristici principale: lungimea activă; rezistenţa electrică a traductorului; constanta de convertire a traductorului, kt; caracteristica de temperatură; domenul de temeratură de funcţionare; caracteristici mecanice cum sunt: deformaţia specifică maximă admisă; rezistenţa la oboseală; efectul de histerezis şi raza minimă de încovoiere; compatibilitatea cu adezivul.
Circuitul de măsurare al traductoarelor tensometrice rezistive cuprinde o punte Wheatstone, figura 2.35, sau un circuit potenţiometric, care transformă variaţia de rezistenţă a traductorului, într-o variaţie proporţională de tensiune sau curent. Schema generală a unei instalaţii de măsurare este prezentată în figura 2.36. Dispozitivul de colectare a semnalului, 2, care poate fi un colector cu ploturi sau cu inele şi perii,
Fig. 2.35. Traductoare tensometrice rezistive cu destinaţie specială.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
61
asigură posibilitatea efectuării măsurătorii cu mai multe traductoare. Semnalul electric de la îeşirea din punte, 3, este transmis circuitului de prelucrare, 4, pentru amplificare, demodulare şi filtrare, apoi în aparatul de măsurare, 5, în cazul măsurătorilor statice, sau în aparatul de înregistrare în cazul măsurătorilor dinamice.
Variaţia rezistenţei traductorului se măsoară prin compararea cu rezistenţe cunoscute, fiind folosit montajul în punte Wheatstone, după trei metode:
Metoda punţii echilibrate, metoda la nul;
Metoda punţii dezechlibrate, metoda deviaţiei;
Metoda punţii de referinţă. În tabelul 2.8 sunt prezentate
principalele configuraţii de punţi cu traductoare tensometrice utilizate la măsurarea momentelor de torsiune.
Metoda cea mai adecvată de măsurare a momentului de torsiune la diferite organe ale autovehiculelor este utilizarea traductoarelor tensometrice. Funcţionarea acestora se bazează pe măsurarea deformaţiilor care se produc într-un arbore solicitat la răsucire pură. Secţiunile principale în care se produc valorile maxime ale eforturilor unitare normale sunt înclinate la 45o faţă de secţiunea transversală, iar valoarea maximă a efortului unitar normal va fi egală cu cea a efortului unitar tangenţial maxim.
Una dintre problemele împortante care apare la măsurarea cu mărci tensometrice a momentelor de torsiune transmise prin arbori rotitori este transmiterea semnalului electric de la arborele rotitor la aparatura fixă a instaleţiei de măsurare. Această problemă se rezolvă prin utilizarea unor contacte mobile (colectoare) cu contact sub
Fig. 2.36. Circuit de măsurare în punte Wheatstone.
Fig. 2.37. Traductoare tensometrice rezistive cu destinaţie specială.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
62
forma unor perii şi a unor inele colectoare, sau fără contact prin unde radio modulate în frecvenţă.
Tabelul 2.8
Schema de dispunere a mărcilor tensometrice pe
arbore
Schema de conectare a mărcilor tensometrice
în punte de măsură
Relaţii de calcul
ex
e
UU
k⋅=
145ε
GDMt
⋅⋅⋅
= 3458
πε
ex
e
UU
k⋅=
145ε
44458
dDD
GMt
−⋅
⋅⋅
=π
ε
ex
e
UU
k⋅=
145ε
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅⋅
=2
1245 2 C
CbhG
Mtε
⎟⎠⎞
⎜⎝⎛=bhf
CC
2
1
2.2.9 Traductoare tensometrice cu semiconductoare Efectul piezoelectric în semiconductoare, descoperit în 1952, de către C.S. Smith, a
fost aplicat în construcţia traductoarelor tensometrice. Principiul de funcţionare al traductorului are la bază faptul că la solicitarea mecanică a unui cristal semiconductor, rezistivitatea variază în limite largi, ca urmare a modificărilor produse în mobilitatea electronilor, iar variaţia rezistenţei datorată modificării secţiunii cristalului este neglijabilă. Materialele semiconductoare cu efectul piezoelectric cel mai pronunţat sunt monocristalele de siliciu şi de germaniu. Variaţia rezistenţei electrice funcţie de deformaţia specifică nu este liniară, aceasta este descrisă de o relaţie de ordinul 2 de forma:
22
20
10 εε ⋅⋅⎟
⎠⎞
⎜⎝⎛+⋅⋅=
Δ ktt
ktt
RR , ( 2.18)

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
63
unde: t0 este temperature de referinţă; t – temperatura în momentul măsurării; k1 şi k2 – constantele traductorului.
Traductoarele tensometrice cu semiconductoare simple, figura 2.38, a, au ca element principal o lamelă 2 tăiată dintr-un monocristal semiconductor, liber sau montat pe un suport din material sintetic 1. Lamela semiconductoare are grosime de aproximativ 10 -50 mm, lungime de 2 -7 mm şi o lăţime de 0,1 – 0,5 mm. Conectarea la circuitul de măsurare se face prin intermediul conductoarelor de conexiune 3. Traductorul dublu, figura 2.38, b, construit din două lamele, una din cristal de tip P, şi cealaltă din cristal de tip N, legate în semipunte, realizează o bună compensare a erorilor de temperatură în domeniul uzual de măsură.
Prin implementarea controlată de impurităţi în reţeaua cristalină a semiconductorului pot fi modificate caracteristicile traductorului. Traductoarele construite cu semiconductoare de tip P, au factorul de convertire pozitiv, iar cele de tip N, au factor de convertire negativ. Caracteristicile traductoarelor tensometrice cu semiconductoare sunt prezentate în graficele din figura 2.39. Variaţia parabolică a rezistenţei electrice funcţie de deformaţia specifică a semiconductorului, figura 2.39, a, pune în evidenţă faptul că coeficientul de convertire nu este constant, ci depinde de nivelul solicitării. În cazul materialelor semiconductoare utilizate la construcţia acestui tip de traductoare, pentru domeniul de deformaţie +/-1000 mm/m, coeficientul de convertire poate fi considerat constant, având valori de 100 – 120, de circa 50 -60 ori mai mari decât în cazul traductoarelor rezistive. După cum se observă din graficul din figura 2.39, b, temperatura influenţează şi ea în mare măsură rezistivitatea cristalului semiconductor. O variaţie de la 20oC la 75oC produce o variaţie a rezistenţei electrice
Fig. 2.38. Traductoare tensometrice cu
semicondictoare.
Fig. 2.39. Caracteristicile traductoarelor tensometrice cu semiconductoare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
64
de aproximativ 3% a rezistenţei electrice, care echivalează cu o deformaţie specifică aparentă eo≈ 30mm/m.
Fixarea traductorului pe piesa se face prin lipire ca în cazul traductoarelor tensometrice rezistive cu folie. După lipire traductorul tensometric cu semiconductoare se contractă, motiv pentru care apare o modificare a stării iniţiale de tensiune şi a constantei traductorului. De asemenea trebuie avut în vedere faptul că cristalul semiconductor este foarte casant şi traductorul nu poate fi montat pe piese cu rază de curbură mică.
Valorile principalelor caracteristici ale traductoarelor tensometrice rezistive şi cu semiconductoare sunt centralizate în tabelul 2.9.
Tabelul 2.9
Tipul traductorului Denumirea caracteristicii Rezistiv Cu semiconductoare
Constanta de convertire 1,6 ... 3,6 80 ... 120 Rezistenţa electrică [Ω] 120; 350; 600; 1000 120 Puterea de rezoluţie [mm/m]
0,1 0,001
Liniaritatea <1% pentru e<10000 mm/m
<1% pentru e<1000 mm/m
Deformaţia specifică de rupere [mm/m]
20000 ... 25000 5000
Rezistenţa la oboseală [număr de cicluri]
107 106
Datorită caracteristicii de convertire neliniară, a sensibilităţii mari la variaţii de
temperatură şi a costului ridicat, traductoarele tensometrice cu semiconductoare sunt folosite pe o arie restrânsă de încercări, cu precădere atunci când se măsoară tensiuni de valoare mică deoarece aceste pot măsura deformaţii de ordinul 0,001 mm/m, în comparaţie cu 0,1 mm/m, cât poate măsura traductorul tensometric rezistiv.
2.2.10 Traductoare capacitive
Traductoarele capacitive sunt condensatoare electrice a căror capacitate este modificată de variaţia mărimii de intrare, în mod obişnuit o deplasare liniară sau unghiulară. Capacitatea condensatorului se determină cu relaţia:
dS
dSC ro ⋅⋅=⋅= εεε , ( 2.19)
în care: e este constanta dielectrică a mediului dintre placi; eo - permitivitatea electrică a vidului; er - permitivitatea relativă a mediului dintre plăci; S - suprafaţa plăcilor conductoare; d – distanţa dintre plăci.
Analizând relaţia 2.19 se observă că capacitatea condensatorului poate fi modificată în mai multe moduri, prin variaţia unuia dintre următorii parametrii: S, d, sau

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
65
e. Acest criteriu defineşte tipul constructiv al traductorului capacitiv, figura 2.40: cu distanţă dintre plăci variabilă, figura 2.40,a; cu suprafaţa plăcilor variabilă, figura 2.40,b; cu dielectric deplasabil, figura 2.40,c.
Traductoarele capacitive cu distanţă dintre plăci variabilă, figura 2.40, a, se compun
din două plăci, dintre care una se deplasează sub acţiunea mărimii neelectrice care este măsurată. Prin derivarea relaţiei 2.19, şi prin trecere la diferenţe finite şe poate exprima variaţia capacităţii traductorului:
dS
dC
ro ⋅⋅−=ΔΔ εε ( 2.20)
În cazul acestui tip de traductoare sensibilitatea creşre odată cu reducerea distamţei dintre plăci, iar obţinerea unei caracteristici liniare este condiţionată de variaţii ale distanţei dintre plăci ∆d mult mai mici decât d. Din aceste motive traductoarele capacitive cu distanţă între plăci variabilă sunt folosite doar pentru măsurarea deplasărilor liniare de valori foarte mici.
Traductoarele capacitive cu suprafaţa plăcilor variabilă, figura 2.40, b, sunt
condensatoare electrice la care sub acţiunea mărimii neelectrice măsurate se modifică poziţia relativă a plăcilor condensatorului. Aceste tipuri de traductoare se construiesc în două variante pentru deplasări liniare, respectiv pentru deplasări unghiulare. Capacitatea electrică a traductoarelor se modifică după o lege de variaţie liniară, conform relaţiilor:
maxCC
respectiv ,ααα ==
lx
CCx ( 2.21)
Fig. 2.40. Traductoare capacitive.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
66
Datorită dificultăţii tehnice de a realiza ghidarea plăcilor mobile ale traductoarelor, liniaritatea caracteridticii este deseori afectată de variaţia distanţei dintre plăci, pe lungimea de lucru.
Traductoarele capacitive cu dielectric variabil, figura 2.40, c, sunt condensatoare a
căror capacitate electrică este modificată datorită deplasării longitudinale între plăci, a unui miez din material dielectric. Când miezul din material dielectric pătrunde cu distanţa l, capacitatea rezultantă Cx se calculează considerând două condensatoare legate în paralel. Raportul dintre capacitatea electrică la un moment dat Cx şi capacitatea condensatorului când condensatorul se află în afara plăcilor Co poate fi scrisă sub forma:
lxk
lx
CC
to
r
r
o
x =+⋅
−⋅=
1
1
δδ
ε
ε ( 2.22)
în care kt este constanta traductorului. Aceste tipuri de traductoare prezintă avantajul variaţiei liniare a capacităţii Cx cu
deplasarea x şi o sensibilitate apropiată de zero la deplasări pe diercţie transversală. Câteva caracteristicile principale ale traductoarelorcapacitive sunt centralizate în
tabelul 2.10. Tabelul 2.10
Firma constructoare
Tipul traductorului
Domeniul de
măsurare [mm]
Eroarea de neliniaritate
[%]
Principiul de
funcţionare
Tipul circuitului de măsură
Observaţii
+/- 0,001 +/- 0,5
+/- 0,01 +/- 1,0
51 F 21
+/- 0,1 +/- 5,0
Fără contact direct, prin modificarea distanţei dintre armături
+/- 0,001
+/- 0,5
+/- 0,01
+/- 1,0
51 D 11
+/- 0,1 +/- 5,0
Idem Cu micrometru încorporat pentru calibrare statică
10 0,5%+/-0,01 mm
DISA Danemarca
51 D 05
70 0,5%+/-0,05 mm
Modificarea distantei dielectrice
Cu modulaţie de frecvenţă
Datorită faptului că capacitatea acestor tipurilor de traductoare are valoare foarte
mică, în mod obişnuit între 10-1 şi 10-2pF, pentru a obţine o caracteristică electrică convenabilă la ieşire, se recomandă ca alimentarea circuitelor de măsurare cu traductoare capacitive să se facă în înaltă frecvenţă, ele fiind conectate, în mod uzual, la un circuit rezonant acordat în apropierea punctului de rezonanţă. Capacitatea redusă a traductorului face ca aceasta să fie sensibil la influenţa capacităţilor parazite ale

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
67
circuitelor de măsură. Pentru a diminua efectul acestora asupra erorilor de măsurare, este necesară ecranarea tuturor elementelor circuitului.
Sensibilitatea ridicată a traductoarelor capacitive face ca acestea să fie utilizate pentru măsurarea deplasărilor foarte mici, 10-1 – 10-2 mm, şi în construcţia microfoanelor pentru măsurarea zgomotelor. Datorită simplităţii şi construcţiei robuste, aceste tipuri de traductoare pot fii utilizate cu precizie satisfăcătoare şi la încercarea autovehiculelor, pentru măsurarea deplasărilor de ordinul zecilor de mm sau grade cum sunt: amplitudinea maselor suspendate în raport cu calea de rulare; deformaţia anvelopei în timpul rulării; unghiului de rotire al clapetei de acceleraţie.
2.3 Aparate utilizate în lanţul de măsurare
2.3.1 Filtrele
Filtrele sunt reţele electrice care au proprietatea de a lăsa să treacă, numai anumite porţiuni a spectrului de frecvenţă a unui semnal electric.
Din punct de vedere al caracteristicii de frecvenţă filtrele se împart în patru mari
categorii: Filtru trece-jos, a cărui caracteristică este prezentată în figura 2.41, a; Filtru trece-sus, a cărui caracteristică este prezentată în figura 2.41, b; Filtre de bandă, a cărui caracteristică este prezentată în figura 2.41, c; Filtru de rejecţie bandă, a cărui caracteristică este prezentată în figura 2.41, d.
În tabelul 2.11, sunt prezentate schemele filtrelor de tip trece jos şi trece sus.
Fig. 2.41. Caracteristica de funcţionare a diferitelor tipuri de filtre.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
68
Tabelul 2.11
Filtru Trece – jos
Trece -sus
R-C
( )
( )τωϕτ
ωτ
⋅−=⋅=
+=
arctgCR
UU
i
e
;
;1
12
⎟⎠⎞
⎜⎝⎛
⋅=
⋅=
⎟⎠⎞
⎜⎝⎛+
=
τωϕ
τωτ
1;
;11
12
arctg
CR
UU
i
e
R-L
( )
( )τωϕ
τ
ωτ
⋅−=
=
+=
arctgLR
UU
i
e
;
;1
12
⎟⎠⎞
⎜⎝⎛
⋅=
=
⎟⎠⎞
⎜⎝⎛+
=
τωϕ
τ
ωτ
1
;
;11
12
arctg
LR
UU
i
e
În cazul utilizării schemelor din tabelul 2.11 frecvenţa de tăiere a filtrelor nu este
bine delimitată. Pentru a elimina acest inconvenient şi pentru a accentua panta de atenuare a filtrului se conectează în serie mai multe filtre după scheme similare cu cele prezentate în tabelul 2.12. Pentru exemplificare, în figura 2.42, este prezentată caracteristica de frecvenţă a două filtre trece-jos realizate în variantele: o secţiune de filtrare R-C, I; două secţiuni de filtrare R-C, II.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
69
Tabelul 2.12
Filtru trece -jos Filtru trece – sus
( )
12
2211
2
10;
;1
1
RRCRCR
UU
i
e
⋅≥⋅=⋅=
+=
τωτ
12
2211
2
10;
;11
1
RRCRCR
UU
i
e
⋅≥⋅=⋅=
⎟⎠⎞
⎜⎝⎛+
=
τωτ
Un filtru de bandă poate fi realizat
prin înserierea unui filtru trece-jos cu un filtru trece sus. În ultima perioadă se constantă tendinţa de filtrare numerică a semnalului, majoritatea soft-urilor utilizate pentru achiziţia şi prelucrarea datelor numerice dispun de funcţii de filtrare numerică foarte puternice şi eficiente. În felul acesta dacă filtrarea se face după o salvare a datelor obţinute în urma încercărilor, în cazul în care parametrii de filtrare au fost aleşi greşit se poate relua această etapă fără a repeta încercarea.
2.3.2 Amplificatoare de măsură Amplificatoarele electronice sunt aparate care folosesc la amplificarea semnalelor
electrice transmise de traductoare sau chiar la prelucrarea acestor semnale. Din punct de vedere al modului de variaţie în timp a semnalului măsurat, distingem:
amplificatoare de curent alternativ pentru semnale cu variaţie rapidă în timp; amplificatoare de curent continuu pentru semnale statice sau cu variaţie lentă în
timp;
Fig. 2.42. Caracteristica de filtrare pentru filtru trece
jos cu o secţiune de filtrare I şi cu două secţiuni de filtrare II.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
70
amplificatoare operaţionale, la care amplificarea corespunde unei operaţii matematice. Amplificatoarele de curent alternativ sunt cele mai utilizate în tehnica măsurătorilor.
În prezent nu mai sunt folosite amplificatoarelel cu etaje de amplificare realizate cu tuburi electronice, acestea fiind înlocuite de amplificatoarele cu etaje de amplificare tranzistorizate şi cu circuite integrate. În figura 2.43 sunt prezentate schemele de conexiune pentru un etaj de amplificare cu tranzistoare cu emitor comun, 2.43, a, respectiv cu tranzistor cu bază comună, 2.43, b.
Dintre firmele constructoare de asemenea de asemenea amplificatoare pot fi amintite Helwett & Packard (S.U.A.) şi Bruel & Kjaer (Danemarca).
Amplificatoare de curent continuu
au fost construite şi ele la început în variante cu etaje de amplificare cu tuburi electronice, în prezent fiind utilizate doar cele cu etaje de amplificare tranzistorizate şi cu circuite integrate.
În figura 2.44, este prezentată schema unui amplificator de curent continuu, simetric, cu două etaje de amplificare realizate cu tranzistori.
Pentru amplificarea semnalelor de mărime constantă, sau cu variaţie în domeniu restrâns în raport cu timpul, se utilizează amplificatorul cu undă purtătoare, cu modulare demodulare.
Fig. 2.43. Etaje de amplificare pentru amplificatoare de curent alternativ.
Fig. 2.44. Schema amplificatorului de curent
continuu cu două etaje de amplificare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
71
Schema bloc a acestui aparat, împreună cu forma semnalului în diferite puncte este prezentată în figura 2.45.
Semnalul măsurat este folosit pentru modularea în amplitudine a undei generate de oscilatorul local. Unda modulată este amplificată cu un amplificator cu cuplaj R-C, după care este demodulată cu sensibilitate la faza şi filtrată în vederea blocării componentei corespunzătoare frecvenţei undei purtătoare. La ieşirea din amplificator, semnalul trebuie demodulat pentru a-i reda adevăratul sens de variaţie.
Dintre firmele care produc amplificatoare de curent continuu pot fi enumerate: Bruel&Kjaer (Danemarca), Philips (Olanda), Kistler (Elveţia), Ithaco (S.U.A.).
Amplificatoarele operaţionale au apărut odată cu apariţia circuitelor electronice, ele
fiind capabile să asigure factori de amplificare mare, într-o gamă de frecvenţă deosebit de largă, începând de la curent continuu până la zeci de MHz.
Un amplificator operaţional, figura 2.46, are intrare simetrică, diferenţială şi ieşire nesimetrică, amplificare foarte mare, de ordinul 106, impedanţă mare de intrare, etc. Legea de amplificare a semnalelor este de forma:
( )npo VVAV −⋅= ( 2.23) Performanţele unui circuit
care foloseşte un amplificator operaţional pot fi modificate substanţial prin reacţii corespunzătoare: amplificarea poate fi micşorată; stabilitate îmbunătăţită; mărimea rezultatelor parazite reduse; lărgime de bandă crescută; viteze de lucru crescute; neliniaritate diminuată; etc.
Fig. 2.45. Schema amplificatorului de curent continuu cu modulare demodulare.
Fig. 2.46. Schema amplificatorului operaţional.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
72
În tabelul 2.13 sunt centralizate schemele prinncipalelor tipuri de amplificatoare operaţionale şi legile de amplificare corespunzătoare:
amplificatoare operaţionale cu circuit repetator de tensiune; amplificatoare operaţionale cu circuit sumator de tensiune; amplificatoare operaţionale cu circuit integrator a tensiunii; amplificatoare operaţionale cu circuit derivator a tensiunii.
Tabelul 2.13
Tipul amplificatorului
operaţional
Schema Legea de amplificare
Cu circuit repetator de tensiune
ino VV =
Cu circuit sumator de tensiune
321 VVVVo ++=
Cu circuit integrator a tensiunii
∫ ⋅⋅
= dtVCR
V ino1
Cu circuit derivator a tensiunii
dtdV
CRV ino ⋅=
Amplificarea foarte mare a unui amplificator operaţional oferă unui circuit cu reacţie
o proprietate foarte utilizată, anume aceia că factorul de transfer devine independent de amplificare, fiind determinat doar de mărimile componentelor externe ataşate amplificatorului operaţional, cu consecinţe benefice privind precizia de măsurare. Folosind proprietăţile amplificatoarelor operaţionale legate după diferite scheme se poate realiza o gamă foarte largă de circuite speciale, care sunt utilizate în tehnica măsurătorilor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
73
2.3.3 Multiplexoare Necesitatea transmiterii simultan printr-un canal de comunicaţie a mai multor
semnale electrice se face prin multiplexare, operaţia inversă fiind demultiplexarea. În măsurarea numerică, procesul de multiplexare poate urma după conversia analog numerică, caz în care se vorbeşte de multiplexarea numerică, sau se face cu separarea căilor analogice în timp, fază sau frecvenţă, multiplexarea analogică.
Procesul de multiplexare cu separare în timp, descris schematic în figura 2.47, necesită sisteme de comutaţie care să deschidă, respectiv să închidă accesul unei mărimi spre o anumită direcţie, prin urmare aceasta se realizează cu n comutatoare ki, dintre care la un moment dat doar unul conduce una din cele n intrări ii, spre o ieşire unică E. Comanda celor n comutatoare se face prin circuitul de comandă Ck care primeşte informaţia de la decodorul, D.
Tehnica actuală de măsurare pune la dispoziţie o gamă largă de multiplexoare capabile să comute 4, 8, 16 canale spre o singură ieşire, cu posibilitatea extinderii gradului de multiplexare.
2.3.4 Circuite de eşantionare şi numărare Măsurătorile numerice ale semnalelor conţin o succesiune de operaţii şi durează un
anumit interval de timp, din acest motiv se doreşte ca în timpul necesar multiplexării valoare măsurandului să nu se modifice. Din aceste considerente au apărut componente şi scheme, ca cea prezentată în figura 2.48, care execută prelevarea unui eşention din mărimea ce se va măsura, precum şi păstrarea şi memorarea acesteia până la sfârşitul procesului. Valoarea eşantionului trebuie să difere cât mai puţin de valoarea măsurandului în intervalul de eşantionare, iar scurgerea timpului nu trebuie să conducă la modificarea valorii memorate.
Fig. 2.47. Schema bloc a multiplexorului cu n canale.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
74
Sistemul de comandă, T, al comutatorului este acţionat din exterior cu semnale binare, de regulă compatibile TTL, DTL sau MDS conduce la două regimuri de funcţionare, conform poziţiei comutatorului K. În poziţia I, semnalul de intrare este amplificat de amplificatorul de intrate A1, cu un factor care poate fi diferit de 1, încarcă condensatorul CM, este amplificat de A2 şi se regăseşte la ieşirea E cu o valoare proporţională, în acest caz circuitul realizând o urmărire a semnalului de intrare. În momentul comutării, în poziţia 2, condensatorul CM va avea o valoare dependentă de valoarea semnalului, iar ieşirea circuitului va repeta această tensiune pe o durată relativ lungă de timp, până se va închide din nou contactul, iar procesul se repetă. Dacă stare închisă a comutatorului durează un timp scurt, semnalul este preluat de CM şi memorat pe durata respectivă, prelevarea fiind de fapt extragerea unui eşantion din semnalul măsurat.
Pentru minimizarea erorilor unui astfel de circuit, se cer anumite performanţe cum sunt: amplificatorul A1 trebuie să aibă o impedanţă cât mai mică de ieşire pentru a putea încărca rapid condensatorul CM; condensatorul CM să aibă o valoare mică, iar dielectricul utilizat o absorbţie redusă; impedanţa la intrare a amplificatorului A2 trebuie să fie cât mai mare; timpul de comutare al întrerupătorului K trebuie să fie cât mai scurt; amplificarea circuitului trebuie să fie constantă, iar cele două amplificatăare se leagă în cascadă; etc.
2.3.5 Conversia analog-numerică În tehnica numerică de prelucrare a datelor este necesară obţinerea unei secvenţe
numerice proporţională cu o mărime analogică. Există o multitudine de convertoare analog-numerice şi este de remarcat faptul că metodele de conversie pot fi îmbunătăţite în cel puţin trei direcţii, viteză, precizie, cost, după cum urmează:
Convertoare analog numerice cu funcţionare în paralel, caracterizate prin viteză mare de funcţionare, timpul de conversie situîndu-se în jurul sutelor de nanosecunde. Conversia se face prin compararea mărimii convertibile cu etalonul, multipli şi submultiplii acestuia;
Convertoare analog numerice cu integrare, caracterizat prin precizie ridicată, erorile nedepăşind valorile de 0,01%. Se utilizează un procedeu de conversie cu transformare intermediară în timp, astfel încât lanţul de prelucrare al semnalului analogic, primit de la traductor, devine tensiune-timp-număr. Prima conversie, tensiune-timp se face cu o metodă care poate fi de mare precizie, cum este integrarea simplă, dublă, cu patru pante, cu multe pante, cu dublă integrare repetată.
Fig. 2.48. Schema circuitului de eşantionare numărare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
75
Covertoare analog numerice cu aproximare succesivă sunt cel mai frecvent utilizate. Metoda folosită pentru conversie este metoda aproximării succesive ce constă dintr-un şir de operaţii ce se desfăşoară în atâtea faze câţi biţi are numărul cu care se exprimă valoarea măsurandului, în fiecare fază urmând să se determine valoarea unui bit. Rezultă că aceste convertoare au o viteză ceva mai mică decât convertoarele în paralel, dar cu mult mai mare decât cele cu integrare.
2.3.6 Aparate de vizualizare şi înregistrare a semnalelor măsurate
În tehnica măsurătorilor, pentru înregistrarea semnalelor, se folosesc o varietate foarte mare de echipamente.
Aceste echipamente permit măsurarea în regim dinamic şi urmărirea în timp a variaţiei semnalului.
La alegerea aparaturii de înregistrare a semnalelor trebuie să se tină seama de următoarele aspecte:
Precizia necesară la măsurare; Puterea electrică a semnalului; Frecvenţa maximă a semnalului înregistrat; Numărul de mărimi ce urmează să fie înregistrate;
În tabelul 2.14 sunt prezentate caracteristicile principalelor tipuri de aparate pentru înregistrarea şi vizualizarea semnalelor. Caracteristica cea mai importantă, după care se alege tipul aparatului utilizat pentru vizualizarea şi înregistrarea semnalelor, este limita superioară de frecvenţă, care reprezintă frecvenţa maximă a unui semnal sinusoidal, care poate fi redat cu distorsiuni minime de către aparat.
Tabelul 2.14
Nr. crt.
Denumirea Eroare uzuală [%]
Limita superioară de frecvenţă [Hz]
1 Aparate de supraveghere: Înregistrator prin puncte; Înregistrator prin linii;
0,2 ... 0,5 0,2 ... 1,5
0,01 ... 0,05 0,25 ... 2,00
2 Înregistratoare rapide: Cu pârghie rigidă şi vârf inscriptor; Cu hârtie termosensibilă; Cu jet de cerneală.
5 ... 10 3 ... 10 2 ... 5
80 ... 100
140 ... 300 400 ... 800
3 Înregistratoare ultrarapide Oscilograful cu fascicol luminos; Osciloscopul cu tub catodic; Înregistratorul magnetic
5
1 ... 5 -
10 103 ... 25 103
până la 20 109 până la 3 105
Dintre aparatele de înregistrare utilizate cel mai frecvent în activitatea de cercetare
experimentală din domeniul autovehiculelor pot fi menţionate următoarele: înregistrateoarele cu pârghie rigidă şi vârf inscriptor; osciloscopul; oscilograful cu spot luminos; înregistartorul cu bandă magnetică. Sistemele moderene de achiziţie şi prelucrare a datelor permit stocarea datelor direct pe suportul magnetic al calculatorului,

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
76
harddisk, şi vizualizarea acestuia pe ecranul calculatorului. În aceste condiţii aparatele clasice de înregistrare şi vizualizare a semnalelor, enumerate mai sus, încep să fie din ce în ce mai rar utilizate, în cazul lanţurilor de măsură specializate, sau în cazul în care se impune înregistrarea unui semnal a căru frecvenţă depăşete frecvenţa maximă la care poate lucra sistemul de achziţie, stocare şi prelucrare a datelor.
Înregistratorul cu pârghie rigidă şi vârf inscriptor, figura 2.49, s-a impus în principal
datorită simplităţii constructive. Înregistrarea semnalului se face direct pe o bandă de hârtie a cărei viteză de derulare, vh, este constantă. Trasarea curbei pe hârtia, 2, este făcută de un vârf inscriptor, 3, fixat la extremitatea unei pârghii rigide articulate, 1, care
este acţionată electromagnetic, deplasarea ei fiind proporţională cu valoarea semnalului măsurat. Trasarea curbei pe hârtie se poate face cu cerneală, prin zgâriere pe hârtie cerată sau termic prin actiunea unui vârf încălzit pe hârtia cu parafină. Frecvenţa maximă de lucru a acestui tip de înregistrator este înfluenţată de frecvenţa proprie de oscilaţie a pârghiei; de viteza de depunere şi de uscare a cernelii; de frecarea dintre vîrful inscriptor şi suportul de hârtie.
Unul dintre dezavantajelel principale ale înregistratorului cu pârghiie rigidă şi vârf inscriptor constă în aceea că eroarea creşte odată cu amplitudinea datorită faptului că vârful inscriptor are o deplasare după un arc de cerc, iar citirea semnalului se face în coordonate rectangulare. Pentru diminuarea erorii unii constructori recomandă folosirea hârtiei imprimate cu caroiaj în coordnate cilindrice.
Osciloscopul cu tub catodic, este aparatul cel mai des utilizat pentru vizualizarea
variaţiei în timp a mărimilor măsurate şi pentru măsurarea diverselor mărimi electrice. Prin prezentarea formei de variaţie în timp a semnalului, aşa-zisa formă de undă, se oferă o cantitate de informaţie mai mare decât în cazul altor aparate ( date cu privire la valorile maxime, frecvenţa, faza iniţială, distorsiuni, etc.)
Osciloscopul prezintă o serie de calităţi, dintre care pot fi enumerate: Lipsa inerţiei în procesul măsurării, respectiv timpul de răspuns de ordinul
nanosecundelor, ceea ce permite studierea semnalelor electrice cu frecvenţe până la 150 MHz (în cazul osciloscoapelor în timp real) şi până la 20 GHz (în cazul osciloscoapelor cu eşantionare).
Sensibilitate ridicată şi precizie bună; Vizualizarea semnalelor nerepetitive ale proceselor tranzitorii (în cazul
osciloscoapelor cu tuburi catodice cu memorie); Impedanţă de intrare mare, ceea ce înseamnă consum de energie foarte mic de la
sursa de semnal şi neinfluenţarea acestei surse;
Fig. 2.49. Schema înregistratorului cu pârghie rigidă şi vârf
inscriptor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
77
Posibilitatea cuplării cu aparatura numerică de memorare şi de prelucrare a datelor; Posibilitatea reprezentării funcţiilor de tip y=f(x), deci nu în raport cu timpul ci în
raport cu o mărime externă x. Datorită acestor calităţi, osciloscopul este aparatul de măsurat analogic cel mai
complet, cu o largă utilizare în practica măsurătorilor mărimilor electrice.
Schema de principiu a unui osciloscop standard este prezentată în figura 2.50, cu următoarele semnificaţii ale blocurilor componente: tub catodic (TC), care reprezintă dispozitivul de măsurare şi de afişare a osciloscopului; atenuator de intrare (A), care constă într-un divizor de tensiune de tip RC, reglabil în trepte cu comutatorul K2; preamplificatorul (PA) care amplifică semnalul la nivelul cerut de amplificatorul Ay; linia de întârziere (LI), care are rolul de a întârzia cu (100-200) ns semnalul aplicat plăcilor de deflexie pe verticală, pentru a fi uşor în urma semnalului declanşat şi aplicat deflexiei pe orizontală; amplificatorul final (Ay) amplifică tensiunea de la ieşirea din PA până la valoarea cerută de sistemul de deflexie pe verticală; baza de timp (BT) are rolul de a genera o tensiune liniar variabilă în timp, necesară comenzii spotului pe orizontală; tensiunea de baleiaj este sincronizată pe semnalul de măsurat când comutatorul K3 este în poziţia a, sau pe un semnal exterior când K3 este în poziţia b; amplificatorul final (Ax) amplifică semnalul bazei de timp până la nivelul cerut de deflexia pe orizontală. Semnalul pentru deflexţia pe orizontală poate proveni de la BT, atunci când comutatorul K5 este în poziţia a, osciloscopul funcţionând în coordonate y-t, sau de la intrarea X, când K5 este în b, osciloscopul funcţionând în sistemul y-x. Blocul de alimentare (BA), are rolul de a furniza tensiuni continue stabile pentru alimentarea blocurilor PA şi BT, a amplificatoarelor finale Ax şi Ay şi pentru alimentarea tubului catodic TC. Cu P1, P2, P3, P4 şi P5 au fost notate potenţiometrele de reglare necesare pentru o vizualizare mai bună.
Unele construcţii moderene de osciloscoape au capacitatea de a memora datele măsurate pe baza cărora se pot realiza următoarele aplicaţii specifice:
Afişarea continua a unui semnal nerepetativ sau a unei imagini fixe după desfăşurarea fenomenului;
Fig. 2.50. Schema de principiu a osciloscopului catodic.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
78
Compararea a două semnale care apar la momente diferite de timp; Afişarea unui semnal cu frecvenţă redusă de repetiţie fără pâlpâirea imaginii; Punerea în evidenţă a variaţiilor unui semnal produse de modificarea unor
parametrii de mediu sau de timp; Reducerea perturbaţiilor aleatoare.
Osciloscoapele cu memorie este utilizat pentru sesizarea şi vizualizarea în bune condiţii a semnalelor din regimurile tranzitorii rapide, când ochiul nu are timp să perceapă oscilograma produsă pe ecranul osciloscopului în timp real.
Osciloscoapele cu memorie se realizează în două variante fundamental diferite: cu memmorie analogică şi cu memorie numerică.
Din analiza cataloagelor firmelor specializate de prestigiu se conturează următoarele tendinţe în evoluţia osciloscopului: utilizarea circuitelor integrate; utilizarea ecranului în culori; utilizarea ecranului cu cristale lichid; implementarea într-o structură multifincţională de tip multimetru, realizarea osciloscoapelor numerice cu microprocesor; etc.
Deoarece la frecvenţe ridicate (50 -100 MHz) osciloscopul analogic este superior celui numeric, s-au fabricat osciloscoape ce pot funcţiona atât în analogic cât şi în numeric. Realizările din domeniul microelectronicii duc nemijlocit la miniaturizarea şi creşterea performanţelor osciloscoapelor.
Mai nou, s-au realizat produse informatice de tip “software”, care permit simularea întregului osciloscop catodic cu ajutorul unui calculator, de tipul IBM-PC, echpat cu placă de achziţie de date.
Oscilograful cu fascicul luminos, este caracterizat prin faptul că înregistrarea nu se
face prin contactul direct dintre elementul de scriere şi hârtie, ci printr-un sistem optic care proiectează unspot luminos pe hârtia fotosensibilă. În acest fel frecvenţa maximă a semnalului care poate fi înregistrat poate creşte până la 25 kHz.
Înregistratorul magnetic cu
bandă, până la apariţia plăcilor specializate în achiziţia de date, înregistratorul magnetic a reprezentat cel mai răspândit mijloc de stocare a datelor obţinute la măsurători. Avantajele folosirii acestuia sunt: domeniu de frecvenţă larg; înregistrarea în paralel a mai multor semnale; comprimarea sau extensia scării timpului prin modificarea vitezei de derulare a benzii de redare; reproducerea semnalului de oricâte ori este nevoie pentru analiza şi prelucrarea lui completă şi corectă; posibilitatea de conectrare la un sistem de
Fig. 2.51. Schema înregistratorului cu bandă magnetică.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
79
achiziţie şi de prelucrare automată a datelor. În figura 2.51 este prezentat schematic principiul de funcţionare al înregistratorului
pe bandă magnetică. Capul de înregistrare 1, este construit dintr-o înfăşurare 2, realizată pe un miez feromagnetic 3. Curentul de înregistrare i alimentează înfăşurarea, iar ca efect se produce un flux magnetic care se închide prin stratul magnetizabil 4 al benzii 6, aflată în mişcare cu viteza vb prin dreptul capului de înregistrare. Cu 5, a fost notat suportul din material plastic al benzii prin care se asigură rezistenţa şi elasticitaea optimă a acesteia. Particulele de oxid feric care conpun stratul magnetizabil păstrează starea de magnetizare astfel imprimată şi după ce au ieşit din contactul cu capul de înregistrare. Redarea informaţiei înregistrate se face prin deplasarea benzii magnetice prin dreptul unui cap de redare, care are o construcţie similară cu a celui de înregistrare. Variaţia fluxului magnetic produsă de deplasarea benzii 6, produce o tensiune electromotoare care reproduce semnalul care a fost înregistrat.
2.3.7 Colectoare pentru transmiterea semnalelor de moment de la arborii rotitori
La măsurarea momentelor pe cale tensometrică, după captarea semnalelor de la
mărcile tensometrrice, aflate în mişcare de rotaţie, transmiterea acestora la lanţul de măsură fix se realizează cu ajutorul unor colectoare, care pot fi realizate în mai multe variante constructive, cum sunt: cu inele şi perii colectoare; inductive; telemetrice.
În cazul colectoarelor cu contact mecanic, figura 2.52, se recomandă utilizarea unor inele colectoare 2 din argint, sau cel puţin argintate şi a unor perii colectoare, 3,
Fig. 2.52. Schema bloc a lanţului de măsură a momentului la care captarea şi transmiterea semnalului
se face cu colector cu inele şi perii.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
80
din grafit. În schema bloc a lanţului de măsură au mai fost utilizate următoarele notaţii: 1 puntea Wheatstone pentru măsurarea momentului; 4 amplificatorul de măsurare format din amplificatorul propriuzis şi din alimentatoarele A1 şi A2 care alimentează cu curent puntea 1, respectiv amplificatorul; 5 filtrul de tip trece – jos; 6 echipamentul de înregistrare şi de stocare a datelor cu alimentatorul său A6.
În figura 2.53, este prezentat un traductor specialiuzat în măsurarea momentului de la ieşirea din cutia de viteze cu trei arbori sau din cutia de distribuţie. Pentru construcţia acestuia se utilizează o flanşă specială 1, care permite montarea colectorului de trecere 2 şi a mărcilor tensometrice 3. Mărcile tensometrice, tip 10/300 FB A 12 Hottinger s-au montat într-o zonă în afara îmbinării canelate, a cărei perete a fost subţiat, pentru mărirea elesticităţii. Legarea mărcilor se face în punte Wheastone, iar alimentarea şi captarea semnalelor de la aceasta se realizează prin inelele 4 ale colectorului de trecere SK 50 şi periile colectoare 5. Suportul periilor colectoare se
fixează rigid pe carcasa cutiei de viteze sau a cutiei de distribuţie, pentru a asigura posibilitatea reglării periilor.
Pentru măsurarea momentelor de torsiune transmise roţilor, se pot folosi traductoare electrice rezistive specializate, figura 2.54, construite din arbori planetari, la care amplasarea mărcilor tensometrice se face în zone sensibilizate prin subţiere. Mărcile tensometrice 1, legate în punte
Wheatstone, sunt lipite pe arborii planetari 2, iar alimentarea şi captarea semnalelor de la traductoare se face prin inelele 3 şi prin periile 4 ale colectorului de capăt. Cu ajutorul dispozitivului 5 sunt îndepărtate periile din grafit de pe inelele colectoare în timpul în care nu se transmite semnale.
În celelalte două cazuri transmitera semnalelor se realizează prin inducţie, cu ajutorul unui colector de tipul celui prezentat în figura 2.55, respectiv prin telemetrie cu modulare în frecvenţă, cu ajutorul unui colector de tipul celui prezentat în figura 2.56
Fig. 2.53. Traductor de moment echipat cu
colector de trecere.
Fig. 2.54. Traductor de moment echipat cu
colector de capăt.
Fig. 2.55. Schema bloc a colectorului cu
transmisie prin inducţie.
Fig. 2.56. Schema bloc a colectorului cu transmisie
prin telemetrie.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
81
2.4 Măsurarea asistată de calculator În cadrul acestui subcapitol sunt prezentate unele modalităţi de realizare a unor
măsurări electronice de laborator, prin utilizarea sistemelor de calcul automat ("hardware"-ul şi "software"-ul necesar achiziţionării, monitorizării si prelucrării datelor), precum şi testarea echipamentelor electronice cu ajutorul calculatoarelor personale (PC) universale sau specializate (microprocesoare pentru măsurări).
În orice laborator de măsurări unde exista cel puţin un sistem de calcul automat de tip PC compatibil IBM (şi o astfel de condiţie este îndeplinită astăzi de toate laboratoarele de încercare), se pot efectua o serie de măsurări, operaţii de testare şi activităţi de urmărire a datelor obţinute în urma încercărilor cu asistenţa calculatorului, ca:
masurarea unor mărimi şi a unor parametri specifici în regim de durată, cu
memorarea şi prelucrarea datelor obţinute din măsurări, precum şi reprezentarea lor într-o formă comodă pentru interpretare (grafice, tabele, diagrame). În acest fel se pot măsura marimi electrice ca: tensiuni la borne, curenti electrici, frecvente, defazaje, faze, derive, factori de cuplaj etc., prin care sunt puse în evidenţă mărimile mecanice pentru care s-au efectuat măsurătorile;
reprezentarea grafica, atât pe un "display" propriu sistemului de achiziţie cât si pe "display"-ul calculatorului, a modului de variaţie în timp pentru mărimi nerepetitive sau a dependenţei dintre diferite marimi măsurate;
monitorizarea comportării în funcţionare a unor echipamente şi instalaţii de încercare;
analiza armonică (spectrală) a semnalelor în cazul măsurării vibraţiilor şi zgomotelor;
reprezentarea caracteristicilor unor semnale precum şi a funcţiilor de transfer etaje sub forma dependentei de frecvenţă (amplitudine-frecvenţă). Această listă poate fi continuată în funcţie de necesităţi, dotări, specificul
aplicaţiilor şi de imaginaţia "operatorului".
2.4.1 Structura echipamentelor pentru măsurare asistată Un sistem destinat măsurării şi achiziţiei de date asistată de calculator are structura
generală prezentată în figura 2.57, în care elementul de preluare este determinat de modul cum se "conectează" aparatul de măsură la echipamentul testat şi poate fi format din: fise, sonde, elemente sensibile, traductoare, senzori etc., sau - mai general - un "senzor inteligent". care conţine un convertor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
82
Tendinţa actuală este ca structura unui sistem modern de achiziţie şi măsurare să arate aşa ca în schema din figura 2.58.
Calculatorul de tip PC folosit trebuie să aibă următoarea configuraţe minimă:
placă de bază, de tip Pentium; microprocesor (Pentium); RAM (memorie cu acces aleator - "Random Access Memory"); HDD ("Hard Disc"); FDD (unitatea pentru disc flexibil - "Floppy Disc"); placă video SVGA pentru prelucrarea datelor grafice; monitor; tastatură, mouse şi alte periferice (scanner, plotter, imprimantă); fax MODEM; placa retea.
Structura interfeţei "hardware" sau a plăcii de achiziţie este prezentată în figura
2.59. Pentru aceasta sunt necesare precizările următoare: intrari/iesiri (I/O) analogice sunt semnale, perturbatoare de informatie, de tipul:
curent (2-20 mA sau 4-20mA); tensiune (0 - 100 V; +/- 10 V;+/- 5 V;0 - 20 mV);
Fig. 2.57. Schema generală a lanţului de măsură şi achiziţie a datelor asistată de calculator.
Fig. 2.58. Schema unui sistem modern de achiziţie şi măsurare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
83
intrări/ieşiri (I/O) numerice sunt semnale:numerice (de tip doua stări (DA, NU), (0,1) sau valoarea numerică a unor mărimi (binar, BCD, zecimal)); cvasinumerice (număr de impulsuri/secunda sau frecvenţă/perioadă unui tren de impulsuri.
2.4.2 Achiziţia de date
Sistemele de achiziţie a datelor sunt sisteme care îndeplinesc urmatoarele cerinţe: preiau datele rezultate în urma măsurătorilor; stochează aceste date; prelucrează datele în vederea analizei; transmit informaţia (către un centru de decizie sau către cercetător).
Sistemele de achiziţie a datelor se pot clasifica dupa numărul canalelor de preluare a datelor în:
sisteme monocanal, cele care preiau datele de la un singur măsurand; sisteme multicanal: cu multiplexare analogică (comutarea intrarilor se face analogic);
cu multiplexare digitală (comutarea intrărilor se face dupa ce au fost convertite). Alegerea tipului de sistem de achiziţie multicanal cu multiplexare analogică sau
digitală se face în funcţie de tipul şi numărul mărimilor de măsurat, modul de variaţie al acestor mărimi, viteza de achiziţie necesară etc.
Realizarea unei arhitecturi pentru un sistem de achiziţie de date impune, în prealabil, studii complete si complexe de natură tehnică-tehnologică (analiza sistemului, procesului sau fenomenului ce trebuie monitorizat) şi totodată o analiză de natură economică (pentru a deţine: eficientă, economie şi preţuri de cost, întreţinere şi exploatare corespunzatoare obiectivelor impuse).
Cu alte cuvinte, se impune realizarea unei funcţii obiectiv (care va avea un minimum sau un maximum) în care parametrii de modificat vor fi ponderile funcţiilor fundamentale ale sistemelor de achiziţie, iar restrictiile vor fi condiţii de natură tehnică şi economică.
Fig. 2.59. Structura unei plăci de achiziţie de date.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
84
Prin urmare, este necesară definirea si analiza: funcţiilor fundamentale ale sistemelor de achiziţie; condiţiilor tehnice impuse de procesul (procesele) de măsurare; condiţiilor economice.
2.4.3 Funcţii fundamentale ale sistemelor de achiziţie Preluarea datelor despre mărimile de interes (în cazul nostru mărimi electrice
rezultate în urma măsurătorilor), cu precizarea că se analizează numai mărimi electrice (curenţi, tensiuni) deoarece în esenţa semnalul aferent oricarei alte marimi fizice va fi convertit în final tot în tensiune sau curent. Acest lucru se realizează, practic, cu ajutorul placilor de achiziţie a datelor (carte sunt interfeţele între lanţul de măsură şi calculatoarele electronice), majoritatea plăcilor sau interfeţelor utilizând semnale primare, semnale de curent sau tensiune.
Stocarea datelor se face fie temporar (pentru analiza momentană sau a transmisie), fie permanent.
Suportul de stocare poate fi, în funcţie de necesităţi şi condiţii de lucru: memorii: ROM ("Read Only Memory"), RAM sau/şi magnetice (suport magnetic); suport nevolatil, ca: înregistratoare, imprimante, memorii nevolatile de capacităţi
mari (de exemplu un CD). Interpretarea şi prelucrarea datelor se poate face în funcţie de complexitatea
sistemului asistat şi de tipurile de mărimi achiziţionate: local sau global. Transmiterea datelor se face conform standardelor, iar modalităţile de transmisie se
adaptează în funcţie de topologia ariei în care se desfasoară procesul precum şi de amplasarea centrului de decizie.
Astfel se poate folosii pentru transmisia de date standardul RS 232, 485 etc. (pentru transmisia serială, în cazul în care distanţa de transmisie este mai mica decât 200 m), transmisia pe portul paralel sau prin reţea, transmisia prin MODEM (pentru distanţe mari) şi nu în ultimul rând transmisia radio sau GSM.
2.4.4 Condiţii impuse de procesul de măsurare Aceste condiţii sunt determinate de:
tipul parametrilor (mărimilor) monitorizate; modul de variaţie a mărimilor; numărul mărimilor monitorizate; dispunerea în spaţiu a senzorilor sau traductoarelor ce preiau mărimile măsurate.
Condiţiile impuse de proces determină numărul şi natura intrărilor şi ieşirilor necesare sistemului de achiziţie precum şi algoritmii ce se pretează pentru manipularea şi prelucrarea datelor.
"Dispunerea spaţiala" a mărimilor măsurate în cadrul laboratorului de încercare (eventual controlate) determină metodele de transmisie locală a datelor.
Este de precizat ca aceste condiţii impuse de procesul de măsurare, înpreună cu condiţiile de natură economică, determină în final arhitectura sistemului de măsurare electronic. Pentru clarificare, se prezintă în continuare un exemplu.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
85
Se dă un proces măsurare pentru care este necesara monitorizarea a cel puţin 7 parametri, iar procesul se desfăşoară întrun laborator de încercare pe o arie de 800 m2. Trei parametri variază lent, doi parametri sunt de natură numerică, iar ceilalti doi parametri variaza rapid. În urma măsurătorilor electronice, deciziile asupra procesului se iau centralizat, de către un sistem "master" aflat la distanţa faţă de proces. Exemplul practic al acestui tip de proces îl poate constitui sistemul de monitorizare şi comandă al unui stand de încercare a motarelor în timpul efectuării probelor de anduranţă.
În aceste condiţii, un sistem de măsurat electronic elegant, acoperitor, dar care nu este restricţionat economic ar avea urmatoarele caracteristici:
7 intrări: cinci analogice, două numerice şi doua analogice; transmisie la distanţă prin radio sau GSM; transmisie locală prin cablu.
Pentru a reduce costurile unui asemenea sistem se face o analiza în urma careia se constata dacă: alegerea unui procesor mai ieftin (care asigură performanţe mai slabe, un numar de I/O mai mic) în combinaţie cu un sistem de multiplexare al I/O este mai ieftin decât un procesor mai avansat care oferă un număr suficient de I/O.
O altă problemă care apare derivă din plasarea spaţială a sistemului de măsurare electronică în raport cu procesul şi cu calculatorul, aceasta ducând la soluţii diferite atât pentru achizitie cât si pentru transmisie, cazurile prezentate în schema din figura 2.60, respectiv amplasarea plăcii de achiziţie de date în imediata apropiere a sistemului pentru care se fac măsurătorilor, figura 2.60,a, sau amplasarea plăcii de achiziţie de date în imediata calculatorului electronic, figura 2.60, b.
În urma analizei caracteristicilor, funcţiilor şi restricţiilor pe care trebuie să le satisfacă un sistem de achiziţie şi măsurare se poate avansa o arhitectura de sistem de măsurare, achiziţie şi comandă modern, ca cel din figura 2.61.
Pe baza acestei arhitecturi se poate realiza un sistem de măsurare, achiziţie şi monitorizare folosind un procesor pe 8 biti din clasa 80C522, sistem ce va fi prezentat pe larg în cele ce urmeaza.
Fig. 2.60. Schema de amplasare a componentelor sistemului de măsurare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
86
În general, în cazul măsurării, monitorizării şi achiziţiei de date se folosesc procesoare industriale, ce înglobează, pe lânga funcţii de unitate centrală, cât şi funcţii specifice circuitelor programabile. În sens strict, procesoarele 80C522 fac parte din familia MCS-SX, cu specificaţia că 8052 are în plus un "timer" de 16 biţi utilizabil la generarea "clock"-ului pentru linia serială. "Timer"-ul de 16 biţi poate opera în două moduri: "autoload" sau "captura".
Din punct de vedere al structurii, familia MCS-SX conţine: unitatea centrala pe 8 biti; oscilator şi ceas intern; 32 linii de I/O; 64 K spaţiu de adresare pentru memoria RAM externă; 64 K spaţiu de adresare pentru memoria program externa (EPROM); două "timer"-e de 16 biţi (la 8052 - 3 "timer"-e); 5 linii de întrerupere cu două nivele de prioritate (la 8052 - 6linii); port serial "full-duplex"; procesor logic.
"Controler"-ele 80CSX posedă spaţiu separat pentru adresarea memoriei program şi a memoriei de date.
Memoria program externa (ROM) la 80C52 poate fi de maximum 64 K, cu precizarea că 4 K sau 8 K sunt în interiorul "cip"-ului (pentru programe mici, memoria program interna este suficientă).
Memoria de date externa (RAM) poate fi de maximum 64 K, 128 K sau 256 K, fiind disponibili în interiorul circuitului, alături de o seama de registre SFR ("Special Function Registers").
Fig. 2.61. Arhitectura unui sistem modern de achiziţie şi măsurare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
87
3 ÎNCERCAREA ŞI OMOLOGAREA ANSAMBLURILOR AUTOVEHICULULUI
3.1 Încercarea şi omologarea motorului
3.1.1 Noţiuni generale privind încercarea motoarelor Pentru a studia performanţele dinamice, economice şi ecologice ale motoarelor cu
ardere internă care echipează autovehiculele trebuie controlată foarte precis viteza unghiulară şi momentul care solicită motorul. În felul acesta pot fi puse în evidenţă regimurile foarte variate de exploatare. Acest lucru se realizează pe standuri de încercare prevăzute cu frâne. Schema unui astfel de stand este prezentată în figura 3.1, el fiind compus din următoarele elemente principale: 1 – motorul cu ardere internă; 2 – frâna; 3 – lagărele de susţinere a arborelui frânei; 4 – braţul frânei; 5 – contragreutatea pentru echilibrarea frânei; 6 – traductorul de viteză unghuilară.
Pentru a efectua încercarea motoarelor în condiţii de laborator, acestea trebuie să
fie instrumentate pentru a măsura cu precizia impusă parametrii cum sunt: debitul de aer; debitul de combustibil; temperatura; presiunea; avansul la aprindere (în cazul motoarelor cu aprindere prin scânteie); avansul la injecţie; etc. Pentru a putea înţelege mai bine procesele complexe de curgere şi ardere care au loc în interiorul cilindrilor, este necesară vizualizarea proceselor cu ajutorul echipamentelor optice de măsură.
Fig. 3.1 Schema standului pentru încercarea motoarelor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
88
Aprecierea motoarelor se poate face pe baza parametrilor determinaţi în timpul încercărilor efectuate pe standunduri. Prin caracteristică a motorului se înţelege dependenţa unor parametrii caracteristici ai motorului (putere, moment, consum), funcţie de unul dintre parametrii caracteristici regimului de funcţionare (viteza unghiulară, sarcina). Caracteristicile principale ale motoarelor care se determină prin încercări pe standuri sunt: caracteristicile de viteză unghulară la sarcini parţiale şi totale; caracteristica de sarcină la viteza unghiulară constantă; caracteristica de mers în gol; caracteristica pierderilor mecanice; etc. Pe standuri mai pot fii efectuate încercări prin care sunt determinate: calităţile de pornire; siguranţa în funcţionare; fiabilitatea; etc.
3.1.2 Frâne pentru încercarea motoarelor Rolul principal al frânelor utilizate la încercarea motoarelor este de a genera un
moment rezistent care acţionează asupra arborelui cotit pentru a determina momentul şi puterea furnizată de motor. Momentul de frânare este reglabil, comanda frânelor realizându-se după unul dintre următorii algoritmi: menţinerea vitezei unghiulare constante a arborelui cotit; menţinerea unui moment de frânare constant; menţinerea sarcinii motorului prin comanda unui debit de combustibil constant.
În practica încercării motoarelor sunt folosite următoarele patru tipuri de frâne: frâne mecanice; frâne aerodinamice; frâne hidrodinamice; frâne electrice.
Frânele mecanice, au o construcţie simplă,
actionarea lor este uşoară, motiv pentru care prereţul lor de cost este relativ scăzut. Principiul de construcţie a unei frâne mecanice cu fricţiune, este prezentat schematic în figura 3.2. După arborele cotit al motorului se fixează tamburul 1. Momentul de frânare, Mf, este produs prin acţionarea frânei cu bandă 2, cu ajutorul dispozitivului cu şurub 7. Pentru creşterea eficienţei frânării banda de frânare 2 este placată cu materialul de fricţiune 3. Rotirea frânei cu bandă este oprită de braţul 4, prin intermediul elementului elastic al
dinamometrului 5, care are şi rolul de a măsura forţa F, care aplicată la distanţa r echilibrează momentul de frecare Mf. Pentru a amortiza oscilaţiile braţului 4 se foloseşte un amortizor 6, care este legat în paralel cu dinamometrul 5.
Momentul de torsiune dezvoltat de motorul cu ardere internă Me, pentru a învinge momentul de frânare Mf, se calculează cu relaţia:
rFMM fe ⋅== ( 3.1) unde: Me este momentul efectiv al motorului; Mf momentul de frânare; F forţa care echilibrează momentul de frecare; r raza la care este aplicată forţa F.
Pentru calculul puterii dezvoltate de motorul cu ardere internă, Pe, se foloseşte relaţia:
Fig. 3.2 Schema frânei mecanice.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
89
ω⋅= ee MP ( 3.2) în care: ω este viteza ungiulară a arborelui cotit al motorului.
Frâna permite modificarea momentului motor Me prin modificarea momentului de frânare Mf. Pentru un moment de frânare şi pentru o sarcină a motorului dată, viteza unghiulară a motorului se stabilizează la o anumită valoare pentru care puterea furnizată de motor Pe este efgală cu puterea consumată prin frecare Pf. Acesta este principiul după care se determină momentul motor corespunzător pentru diferite viteze unghiulare şi sarcini ale motorului. Frânele mecanice au următoarele dezaventaje: momentul de frânare este constant pentru o forţă de strângere a benzii de frânare, la viteze unghiulare ridicate apar vibraţiile şi pericolul de gripare; instabilitate la funcţionarea la viteze ungiulare diferite; datorită încălzirii apar variaţii importante ale coeficienţilor de frecare. Datorită acestor dezavantaje acest tip de frâne nu mai sunt utilizate la încercările de laborator.
Indiferent de modalitatea de creere a momentului rezistent, prin utilizarea forţei de frecare, a forţei de rezistenţă aerodinamică, a celei hidrodinamice sau a celei electromagnetice, principiul de măsurare a momentului motor este acelaşi. Frânele utilizate în prezent în construcţia standurilor de încercare motor moderne sunt frânele electrice, foarte rar mai sunt în uz frâne hidrodinamice.
Frânele aerodinamice au o construcţie simplă, sub forma unor ventilatoare cu
palete lungi. Acest tip de frâne au fost utilizate la încercări de anduranţă la regimuri staţionare. Dezavantajul principal al acestui tip de frână constă în reglarea dificilă a încărcării motorului, deoarece pentru aceasta este necesară oprirea acestuia şi modificare caracteristicilor ventilatorului prin modificarea geometriei sau a dimensiunilor acestuia. Pentru măsurarea puterii motorului se foloseste una dintre următoarele trei metode: calibrare înaintea încercărilor; măsurarea momentului reactiv al motorului încercat; măsurarea momentului care solicită axul de legătură al frânei cu ventilatorul cu un traductor de cuplu.
Frânele hidrodinamice se mai află încă în folosinţă în unele dintre laboratoarele de
încercare a motoarelor. Statorul şi rotorul sunt cuplate prin intermediul apei, sau a fluidului utilizat, care transmite momentul de la rotor la stator. Modificarea rezistenţelor se face relativ încet, fiind necesare câteva secunde pentru stabilizare. De asemenea acest tip de frâne nu pot fii utilizate la antrenarea motoarelor încercate. Frânele hidrodinamice se pot clasifica în două categorii principale: cu fricţiune (discuri, bolţuri) şi cu turbulenţă (cavităţi).
În figura 3.3, a este prezentată schematic frâna cu bolţuri. Bolţurile se distribuie uniform pe suprafaţa exterioară a rotorului 1 şi pe cea interioară a statorului 2. Pe rotor sunt amplasate minim două rânduri de bolţuri. Apa introdusă în frână prin robinetul 3, formează datorită forţei centrifuge un inel în corpul 2, care este antrenat în mişcare de rotaţie. Frecarea dintre acest inel şi rotorul 1 generează momentul rezistent, iar frecarea dintre inel şi statorul 2 îl transmite corpului frânei. Robinetul 4 asigură evacuarea apei din frână. Pentru obţinerea unui regim stabilizat de încercare condiţia de continuitate impune ca debitele robinetelor 3 şi 4 să fie egale, iar mărimea acestora trebuie reglată astfel încât să se asigure o răcire optimă a apei. În mod uzual sunt folosite frâne cu mai multe compartimente. În figura 3.3, b este prezentată schema constructivă pentru o

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
90
frână cu bolţuri cu două compartimente I şi II. Specific pentru această frână este peretele 5, care separă compartimentele vecine, iar domeniul de reglaj va fii suma domeniilor aferente celor două secţiuni ale frânei. Frâna cu mai multe compartimente introduce un parametru suplimentar de reglaj, numărul de compartimente active. Succesiunea cuplării compartimentelor are ca scop reducerea domeniului regimurilor instabile, specifice umplerii parţiale cu apă. Pentru momente rezistente mici, lucrează un singur compartiment, odată cu mărirea acestora cuplează pe rând următoarele compartimente.
Domeniul de utilizare al frânelor
hidrodinamice, reprezentat în figura 3.4, este limitat de parabola OA, corespunzătoare umplerii maxime cu apă, de dreapta AB, corespunzătoare momentului maxim, de dreapta BC, corespunzătoare puterii maxime, de dreapta CD, corespunzătoare turaţiei maxime şi de dreapta OD, corespunzătoare puterii mimime absorbite la funcţionarea frânei fără apă. Parabolele 1 şi 2 se obţin la umplerea parţială a frânei cu apă, iar trecere de la funcţionarea în regimul a la regimul b se poate obţine prin micşorarea secţiunii robinetului 3. Prin această manevră se obţine reducerea debitului apei, prin urmare pentru stabilizarea funcţionării frânei trebuie acţionat şi robinetul 4, astfel încât debitele ce trec prin robinetele 3 şi 4 să fie egale. Debitul de apă trebuie ales astfel încât temperatura apei să nu depăşească 75oC. La temperaturi mai mari apare pericolul de
Fig. 3.3. Schema frânei cu bolţuri. a – cu un compartiment; b – cu două compartimente.
Fig. 3.4 Domeniul de utilizare al
frânelor hidraulice.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
91
vaporizare parţială, mediul bifazic determinând o instabilitate pronunţată a momentului rezistent. De asemenea vaporizarea favorizează depunerea, suprafeţele rotorului şi statorului, a sărurilor dizolvate în apă. Pentru ca frânele să fie eficiente, domeniul de putere al frânei trebuie să acopere întregul domeniu de putere al motorului încercat, altfel spus, caracteristica externă de putere a motorului trebuie să nu depăşească suprafaţa OABCD.
Frânele electrice, au arborele conectat la un generator electric. Funcţionarea
frânelor electrice se bazează pe interacţiunea câmpurilor magnetice ale rotorului şi statorului, momentul rezultant transmis la carcasa statorului reprezintă momentul de frânare. Un mare avantaj al frânelor electrice este acela că câmpul electromagnetic poate fi modificat aproape instantaneu, în felul acesta poate fi modificat foarte rapid momentul rezistent. Modificarea rapidă a momentului rezistent este folositoare mai ales în cazul în care se efectuează încercări dinamice, în timpul cărora sarcina motorului variază foarte rapid în sens crescător sau descrescător.
Funcţie de varianta constructivă, frânele electrice îndeplinesc numai rolul de frână, sau îndeplinesc rolul de frână şi de motor de antrenare pentru motorul încercat. Utilizând frâna ca motor de antrenare sunt puse în evidenţă pierderile produse de mecanismele auxiliare ale motorului, de vâscozitatea uleiului, de frecările din mecanismul motor şi calităţile de pornire ale motorului.
Ca generatoare electrice, frânele electrice transformă energia mecanică furnizată de motorul cu ardere internă încercat în energie electrică care este transmisă într-o reţea de încărcare. Încărcarea se produce fie cu ajutorul unui reostat (cu apă sau cu rezistenţe metalice), în acest caz energia electrică se transformă în energie termică, fie se conectează generatorul la reţea şi energia este livrată diverşilor consumatori.
Frânele electrice se clasifică în: frâne de curent continuu (DC direct-curent); frâne de curent alternativ (AC alternating-curent); frâne cu curenţi turbionari.
În cazul frânelor de curent continuu (DC) momentul rezistent poate fi reglat într-o
gamă foarte largă. În cazul frânelor de putere mică nu este necesară utilizarea răcirii cu apă fiind suficientă răcirea cu aer a reostatului de încărcare. Marele avantaj al frânelor de curent continuu constă în posibilitatea folosirii lor ca motor de antrenare. Alte avantaje ale acestui tip de frâne sunt: modifică foarte rapid momentul rezistent; pot fi controlate uşor cu ajutorul calculatorului electronic. Dezavantajul principal al acestui tip de frână îl constituie momentul de inerţie mare, care împiedică modificarea rapidă a vitezelor unghiulare.
Frânele de curent alternativ (AC) sunt generatoare de curent alternativ, care pot
funcţiona atât ca frâne cât şi ca motoare de antrenare. Frânele de curent alternativ pot modifica foarte rapid momentul rezistent şi pot fi controlate cu ajutorul calculatorului electronic. La fel ca şi în cazul frânelor de curent continuu modificarea rapidă a vitezelor unghiulare este împiedicată de momentul de inerţie mare al componentelor aflate în mişcare de rotaţie.
Frânele cu curenţi turbionari sunt folosite pe scară largă în laboratoarele de încercare. În cazul acestor frâne energia electrică generată este transformată în căldură în frână, iar transferul de căldură către mediul exterior este realizat forţat de o instalaţie

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
92
de răcire cu apă. Frânele cu curenţi turbionari au o construcţie simplă şi sunt robuste. Spre deosebire de frânele de curent continuu şi de cele de curent alternativ acest tip de frâne nu pot fi folosite pentru antrenare. Frânele cu curenţi turbionari sunt uşor de controlat cu ajutorul calculatoarelor electronice, iar momentul rezistent poate fi modificat foarte rapid. Datorită momentului de inerţie mai scăzut pot fi realizate schimbări mult mai rapide ale vitezelor unghiulare decât în cazul frânelor de curent continuu şi a celor de curent alternativ.
În figura 3.5 este prezentată diagrama de funcţionare pentru frâna cu curenţi turbionari. Aria delimitată de curbele caracteristice limitează momentul rezistent pe care îl poate genera frâna. Cele cinci curbe caracteristice sunt: OA – dreapta pentru turaţii scăzute, în lungul acesteia momentul rezistent este generat de curentul turbionar maxim, care poate fi dat de frână la turaţii scăzute; AB – dreapta corespunzătoare momentului maxim, aceasta caracterizează momentul rezistent maxim pe care îl poate genera frâna; BC – parabola corespunzătoare puterii maxime, aceasta arată care este puterea maximă care poate fi disipată de frână, funcţie de care este dimensionat sistemul de răcire cu apă al frânei; CD – limita turaţiei maxime, dată de turaţia maximă la care poate funcţiona frâna la parametrii normali; OD – caracteristica pierderilor reziduale datorate frecărilor din lagăre, rezistenţele aerodinamice şi de magnetizarea remanentă. Peste această caracteristică este suprapusă şi caracteristica de moment a unui motor cu ardere internă. Pentru ca încercarea motorului să se efectueze în condiţii bune, diagrama de moment a motorului trebuie să fie cuprinsă în interiorul conturului OABCDO, pentru toate regimurile de încercare.
După cum s-a mai amintit la începutul subcapitolului pentru comanda unei frâne, indiferent de tipul ei, este utilizat la un moment dat unul dintre următorii trei algorimi principali de comandă ai frânelor:
menţinerea vitezei unghiulare constante a arborelui cotit; menţinerea unui moment de frânare constant; menţinerea unui debit de combustibil constant.
Menţinerea vitezei unghiulare constante a arborelui cotit - Comanda frânei după
acest algoritm are ca obiectiv menţinerea constantă a vitezei unghiulare a motorului în timpul încercărilor efectuate la diferite nivele ale momentului motor. Spre exemplu, laborantul doreşte să păstreze o valoare constantă a turaţiei motorului la 2500 rot/min, dar măreşte valoare momentului motor de la 60 N*m la 110 N*m, comandând un debit mai mare de combustibil. Pentru menţinerea turaţiei constante la 2500 rot/min este nevoie ca momentul rezistent generat de frână să crească, astfel încât să echilibreze momentul motor de 110 Nm.
Fig. 3.5 Diagrama de funcţionare a
frânelor cu curenţi turbionari.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
93
În cazul frânelor cu apă controlul frânei se face manual după cum urmează. Cu motorul funcţionănd la 2500 rot/min şi 60 N*m, se măreşte debitul de combustibil, rezultând o creştere a turaţiei. Momentul rezistent al frânei este mărit manual de către laborant până când turaţia se stabilizează la 2500 rot/min. Să presupunem că momentul motor obţinut este de 90 N*m, mai mic decât cel pe care urmărim să-l obţinem. Se reia procedeul de reglare manuală în paşi succesivi, prin mărirea debitului de combustibil urmată de mărirea momentului rezistent până când la valoarea 2500 rot/min a turaţiei se obţine momentul dorit de 110 N*m.
Frânele electrice sunt capabile să menţină viteza unghiulară constantă în mod automat în felul următor: sistemul de comandă şi control al standului de încercare motor este poziţionat pe “menţinere constantă a vitezei unghiulare”, spre exemplu la o valoare de 2500 rot/min a turaţiei; operatorul va mări lin debitul de combustibil până când momentul va ajunge la valoarea de 60 Nm; operatorul va mări lin debitul de combustibil până când se obţine momentul ţintă 110 Nm; în timpul acestui proces sunt monitorizaţi în permanenţă parametri de funcţionare a motorului. Pentru menţinerea vitezei unghiulare constante este mărit încet momentul de frânare până când viteza unghiulară se stabilizează la valoarea comandată.
Menţinerea unui moment de frânare constant – Comanda după acest algoritm îşi
propune să menţină momentul dezvoltat de motor la o valoare constantă, indiferent de deschidere a clapetei de acceleraţie, respectiv de debitul de combustibil comandat în cazul motoarelor cu aprindere prin comprimare. La fel ca şi în cazul menţinerii constante a vitezei unghiulare comanda standului de încercare poate fi făcută manual sau automat.
În cazul utilizării frânelor electrice momentul motor poate fi păstrat constant în mod automat în felul următor: sistemul electronic de comandă a standului de încercare este poziţionat pe “menţinere moment constant”, spre exemplu selectându-se o valoare a momentului de 110 Nm; operatorul comandă lin mărirea debitului de combustibil admis; în timp ce operaorul măreşte debitu de combustibil prin sistemul de comandă şi control al standului se monitorizează parametrii de funcţionare a motorului şi se menţine momentul rezistent la valoarea constantă prestabilită. Ca consecinţă a menţinerii constante a momentului rezistent şi a măriri debitului de combustibil se constată creşterea vitezei unghiulare şi a puterii dezvoltate de motorul cu ardere internă. Prin efectuarea unor încercări complexe în care palierele de moment constant sunt combinete cu paliere de viteză unghiulară constantă se pot stabili cicluri de încercare pentru punerea în evidenţă a calităţilor economice, de consum, şi a celor privind emisiile poluante.
Menţinerea unui debit de combustibil constant – Funcţionarea după acest algoritm
de comandă îşi propune menţinerea constantă a deschiderii clapetei de acceleraţie sau a debitului de combustibil comandat de pompa de injecţie şi încercarea motorului la diferite momente rezistente şi viteze unghiulare. Acest mod de comandă se foloseşte la determinarea caracteristicilor de sarcină totală şi a caracteristicilor de sarcini parţiale. Efectuarea încercărilor, folosind acest algoritm de comandă se face în felul următor: este stabilită sarcina pentru care se face determinarea prin stabilirea deschiderii clapetei de acceleraţie sau a debitului de combustibil admis; se aduce motorul în

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
94
regimul de funcţionare corespunzător momentului maxim pentru sarcina de încercare; se notează viteza unghiulară şi momentul dezvoltat de motor; se comandă reducerea lină a momentului rezistent, obţinându-se o creştere uşoară a vitezei unghiulare şi a puterii dezvoltate de motorul cu ardere internă şi se notează valorile obţinute pentru moment şi viteză unghiulară; acest procedeu se repetă până la atingerea vitezei unghiulare maxime corespunzătoare sarcinii la care se face încercarea.
Acest tip de încercare poate să înceapă şi de la viteza unghiulară maximă a motorului cu ardere internă, în acest caz comandându-se o creştere lină a momentului rezistent. În urma acestor încercări se pot stabili şi caracteristicile de consum şi de emisii poluante în timpul funcţionării la sarcini parţiale.
3.1.3 Măsurarea debitului de aer Estimarea debitului masic al aerului consumat de motorul cu ardere internă se
poate face pornind de la expresia următoare:
ssiv knVm
60
.ρη= ( 3.3)
în care: ri este densitatea aerului în [kg/m3]; ηv randamentul volumic; Vs cilindrea totală; ks constantă (ks=1 pentru motoarele în doi timpi; ks=2 pentru motoarele în patru timpi). La determinarea densităţii aerului, ri, funcţie de condiţiile de mediu se poate folosi relaţia:
i
ii RT
p=ρ ( 3.4)
unde: pi presiunea absolută [Pa]; R constanta specifică aerului [J/kgoK]; Ti temperatura absolută [oK].
În practică s-a constatat că aproximarea debitului de aer consumat, cu ajutorul relaţiei 3.3, nu este suficient de precisă. În consecinţă se recurge la măsurarea debitului pentru aprecierea cu precizie a randamentului volumic, a coeficientului de saturaţie şi al gazelor nearse recirculate.
Având în vedere caracterul curgerii gazelor prin motoarele cu ardere internă se au în vedere două tipuri de măsurători ale debitului gazelor, şi anume: măsurători instantanee; măsurători cvasi-staţionare.
Măsurătorii instantanee – Datorită caracterului ciclic al proceselor care au loc în
motoarele cu ardere internă şi datorită schimbărilor rapide ale caracteristicii curgerii gazelor de la debite egale cu zero până la valorile maxime în câteva fracţiuni de secundă, cercetătării sunt interesaţi de studiul amănunţit al proceselor de curgere care au loc în toate fazele de funcţionare ale motoarelor cu ardere internă. Spre exemplu ei pot determina valorile maxime al debitului de aer din timpul admisiei, debitul de gaze arse evecuate, debitul de amestec nears reîntors în galeria de admisie datorate curgerii inverse înainte de închiderea supapei de admisie. Studiul acestor procese presupune utilizarea unui lanţ de măsură specializat cu răspuns foarte rapid (câteva milisecunde) şi cu un domeniu foarte larg al valorilor determinate.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
95
Măsurători cvasi-staţionare – În cazul acestui tip de măsurători, cercetătorii nu sunt interesaţi de determinarea variaţiei debitului de aer sau de gaze arse, ci sunt interesaţi de valorile medii ale acestora, valori care caracterizează întreg ciclu de funcţionare. Spre exemplu, dacă un motor cu ardere internă consumă 6 m3 de aer în 10 minute, debitul mediu de aer va fi de 10 l/s.
Aceste două direcţii principale de cercetare experimentală a curgerii gazelor au
impus dezvoltarea unor metode adecvate care pot fi utilizate în laboratorele de încercare a motoarelor pentru determinarea debitelor instantanee şi qvasi-staţionare ale gazelor admise sau evacuate.
Măsurarea debitului de aer cu ajutorul
dispozitivelor calibrate de reducere a secţiunii – Cea mai simplă metodă de măsurare a debitului în cazul măsurătorilor cvasi – staţionare, figura 3.6, constă în utilizarea unui dispozitiv calibrat de reducere a secţiunii 1, amplasat la intrarea într-un rezervor de liniştire 2. Alimentarea motorului cu ardere internă cu aer se face din rezervorul de liniştire 2, al cărui volum trebuie să fie suficient de mare pentru a amortiza pulsaţiile generate de motorul cu ardere internă, astfel încât curgerea prin orificiul calibrat să fie suficient de lină. Cu ajutorul manometrului 3 este măsurată diferenţa de presiune ∆p.
Formulele de calcul a debitului masic .m şi
volumic .V sunt aceleaşi pentru toate tipurile de
reducere a secţiunii şi au forma:
2ACV 2 d
..ppACm d Δ⋅⋅⋅=Δ⋅⋅⋅⋅=
ρρ ( 3.5)
unde: Cd coeficientul de descărcare al dispozitivului de reducere a secţiunii; A aria minimă a dispozitivului; r densitatea aerului; ∆p căderea de presiune după dispozitivul de reducere a secţiunii. Căderea de presiune ∆p, după dispozitivul de reducere a secţiunii, se calculează cu relaţia:
hgp i ⋅⋅=Δ ρ ( 3.6) în care: ri este densitatea lichidului utilizat în manometru; g - acceleraţia gravitaţională; h - diferenţa dintre înălţimile coloanelor de lichid ale manometrului, reprezentate în figura 3.7.
Densitatea aerului r se determină cu relaţia:
a
o
RTp
=ρ ( 3.7)
Fig. 3.6 Măsurarea a debitului cu dispozitive calibrate de reducere
secţiunii.
Fig. 3.7 Variaţia debitului masic şi a
diferentei de presiune.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
96
unde: po este presiunea atmosferică absolută [Pa]; Ta temperatura aerului [oK]; R constanta specifică aerului [J/kgoK].
Din experienţa de cercetare acumulată s-au stabilit dimensiunile optime ale dispozitivului de reducere a secţiunii, constatându-se că utilizarea unor diafragme plate asigură obţinerea unor coeficienţi de descărcare Cd acceptabili. Valorile uzuale sunt Cd≈0.6, iar căderea de preiune rezultată ∆p<1,2 kPa. Datorită oscilaţiilor de presiune această metodă nu poate fi utilizată pentru determinarea debitului instantaneu de aer, fapt ilustrat şi de diagrama din figura 3.7, în care este prezentată pe acelaşi grafic
variaţia în timp a debitului masic .m şi al căderii de presiune ∆p pentru un proces
pulsator.
Măsurarea debitului de aer cu ajutorul contoarelor volumetrice – În practica încercărilor sunt utilizate diferite tipuri de contoare volumetrice, cum sunt: cu tambur; cu membrană; cu rotor Roots. Dintre acestea cea mai precisă metodă de măsurare a debitelor de aer mari în cazul proceselor cvasi – staţionare, constă în utilizarea unor contoare construite după principiul compresoarelor Roots figura 3.8. Debitul masic al aerului care trece printr-un astfel de contoar se
calculează cu o formulă de forma:
nVm di ⋅⋅= ρ.
( 3.8) unde: Vd este volumul de gaz trecut prin contoar; ri densitatea gazului intrat în contoar; n turaţia mecanismului Roots [rot/s].
Acurateţea măurătorilor nu este influenţată de pulsaţiile de presiune, acest tip de aparat oferă o precizie mai mare de măsurare în comparaţie cu cele cu dispozitive calibrate de reducere a secţiunii şi cu cele cu dispozitive de laminare. Deplasarea aerului prin contorul Roots determină o mică cădere de presiune cuprinsă în mod obişnuit între 1 şi 2 kPa. Ca dezavantaj trebuie menţionat răspunsul mai lent la
schimbările rapide de debit, datorat în principal inerţiei componentelor aflate în mişcare de rotaţie.
Măurarea debitului de aer cu ajutorul
dispozitivelor de laminare – În figura 3.9 este prezentată schema de principiu a unui anemometru cu dispozitiv de laminare utilizat pentru măsurarea debitelor de aer în cazul curgerii cvasi-staţionare. Aparatul este construit din numeroase pasaje de curgere paralele astfel încât să se asigure o curgere laminară. Dimensiunile uzuale ale pasajelor de
Fig. 3.8 Contoar volumetric de tip
Roots.
Fig. 3.9 Anemometru cu dispozitiv de
laminare.
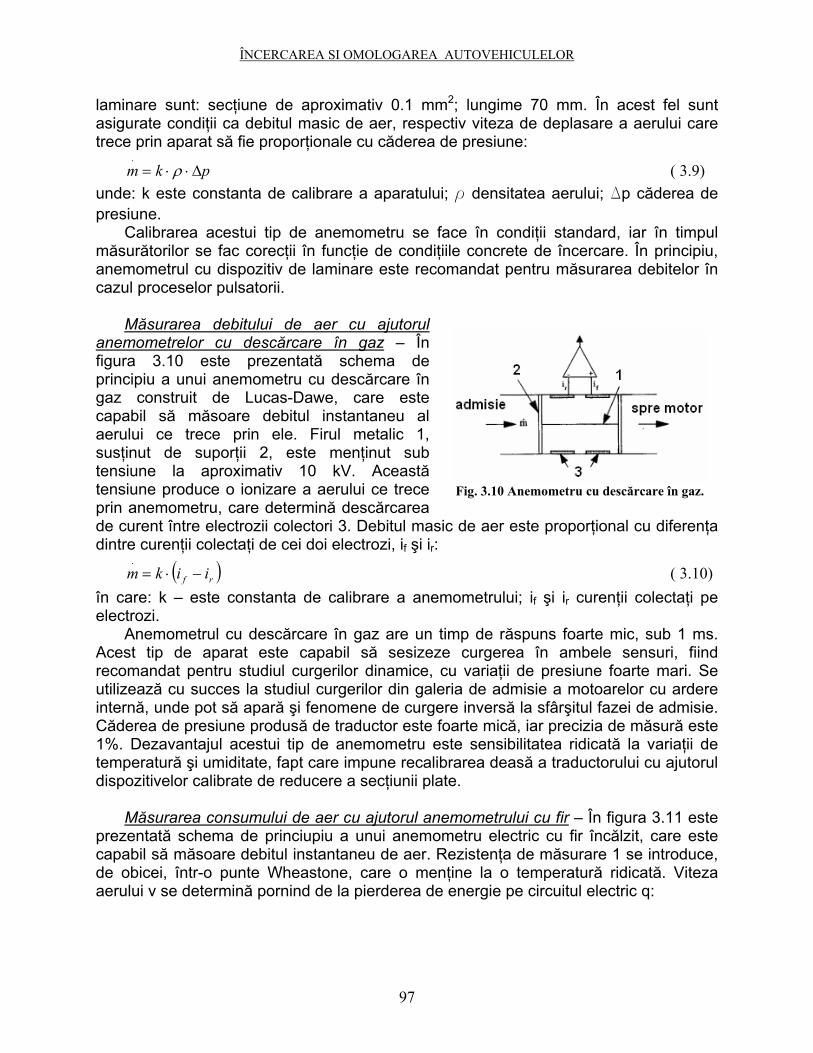
ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
97
laminare sunt: secţiune de aproximativ 0.1 mm2; lungime 70 mm. În acest fel sunt asigurate condiţii ca debitul masic de aer, respectiv viteza de deplasare a aerului care trece prin aparat să fie proporţionale cu căderea de presiune:
pkm Δ⋅⋅= ρ.
( 3.9) unde: k este constanta de calibrare a aparatului; r densitatea aerului; ∆p căderea de presiune.
Calibrarea acestui tip de anemometru se face în condiţii standard, iar în timpul măsurătorilor se fac corecţii în funcţie de condiţiile concrete de încercare. În principiu, anemometrul cu dispozitiv de laminare este recomandat pentru măsurarea debitelor în cazul proceselor pulsatorii.
Măsurarea debitului de aer cu ajutorul
anemometrelor cu descărcare în gaz – În figura 3.10 este prezentată schema de principiu a unui anemometru cu descărcare în gaz construit de Lucas-Dawe, care este capabil să măsoare debitul instantaneu al aerului ce trece prin ele. Firul metalic 1, susţinut de suporţii 2, este menţinut sub tensiune la aproximativ 10 kV. Această tensiune produce o ionizare a aerului ce trece prin anemometru, care determină descărcarea de curent între electrozii colectori 3. Debitul masic de aer este proporţional cu diferenţa dintre curenţii colectaţi de cei doi electrozi, if şi ir:
( )rf iikm −⋅=.
( 3.10) în care: k – este constanta de calibrare a anemometrului; if şi ir curenţii colectaţi pe electrozi.
Anemometrul cu descărcare în gaz are un timp de răspuns foarte mic, sub 1 ms. Acest tip de aparat este capabil să sesizeze curgerea în ambele sensuri, fiind recomandat pentru studiul curgerilor dinamice, cu variaţii de presiune foarte mari. Se utilizează cu succes la studiul curgerilor din galeria de admisie a motoarelor cu ardere internă, unde pot să apară şi fenomene de curgere inversă la sfârşitul fazei de admisie. Căderea de presiune produsă de traductor este foarte mică, iar precizia de măsură este 1%. Dezavantajul acestui tip de anemometru este sensibilitatea ridicată la variaţii de temperatură şi umiditate, fapt care impune recalibrarea deasă a traductorului cu ajutorul dispozitivelor calibrate de reducere a secţiunii plate.
Măsurarea consumului de aer cu ajutorul anemometrului cu fir – În figura 3.11 este
prezentată schema de princiupiu a unui anemometru electric cu fir încălzit, care este capabil să măsoare debitul instantaneu de aer. Rezistenţa de măsurare 1 se introduce, de obicei, într-o punte Wheastone, care o menţine la o temperatură ridicată. Viteza aerului v se determină pornind de la pierderea de energie pe circuitul electric q:
Fig. 3.10 Anemometru cu descărcare în gaz.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
98
( )cvbaRIq ⋅+≅⋅= ρ2 ( 3.11)
unde: q este energia pierdută de rezistenţa electrică, care a fost transformată în căldură; I curentul care trece prin rezistenţă; R rezistenţa electrică; r densitatea aerului; v viteza curentului de aer; a, b, c constante determinate la calibrarea anemometrului.
Utilizând ecuaţia de continuitate:
sAvm ⋅⋅= ρ.
, ( 3.12) unde: As este aria secţiunii de trecere. Din relaţiile 3.11 şi 3.12 rezultă:
C
mBARIq ⎟⎠⎞
⎜⎝⎛⋅+=⋅=
.2 ( 3.13)
în care A, B şi C sunt constante determinate la calibrarea anemometrului. Din relaţia 3.13 se observă că debitul de aer variază funcţie de energia transformată în căldură după o funcţie nelineară.
Acest tip de anemometru răspunde instantaneu la schimbări ale debitului de combustibil. Pentru a asigura un răspuns rapid, dimensiunile firului 1 trebuie să asigure o inerţie termică cât mai redusă, ceea ce înseamnă că diametrul va fi foarte mic, <100 μm, fapt care conduce la obţinerea unor traductoare foarte fragile. În practică sunt folosite fire de diametre mai mari care asigură o robusteţe mai ridicată traductorului. Trebuie amintit faptul că traductorul măsoară debitul în ambele direcţii, dar spre deosebire de anemometrul cu descărcare electrică este incapabil să pună în evidenţă sensul curgerii.
Estimarea debitului de aer pornind de la analiza gazelor arse – Debitul de aer admis
în motoarele cu ardere internă poate fi măsurat indirect prin analiza produşilor de ardere rezultaţi. Metodele bazate pe analiza gazelor arse nu sunt precise, motiv pentru care sunt utilizate numai atunci când sunt suficiente informaţii aproximative şi se face analiza gazelor din alte considerente.
3.1.4 Măsurarea consumului de combustibil Măsurarea consumului de conbustibil se poate face utilizând una dintre următoarele
metode: volumetrică; debitmetrică; gravimetrică; indirectă. Măsurătorile de consum şi înstalaţiile utilizate pentru efectuarea acestora se împart
în două mari catergorii: care determină consumul mediu de combustibil; care determină consumul instanatneu de combustibil.
Măsurarea consumului mediu de combustibil – Pentru măsurarea consumului
mediu de combustibil se utilizează: metoda volumetrică, figura 3.12, a; metoda gravimetrică, figura 3.12, b; metode indirecte, similare cucea din figura 3.12, c.
Fig. 3.11 Anemometru electric cu fir.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
99
Metoda volumetrică , prezentată schematic în figura 3.12, a se aplică în mai multe
variante, una dintre acestea fiind metoda vaselor gradate. Metoda se realizează prin trecerea din rezervor în vasul gradat 1 şi a apoi alimentarea cu combustibil a motorului cu ardere internă cu ajutorul robinetului cu trei căi 4. Acest robinet are trei poziţii de lucru: I – alimentare motor direct din rezervor; II - alimentare vas gradat;III – alimentare motor din vasul gradat. Robinetul 5, care face legătura dintre vasul gradat 1 şi mediul exterior are poziţia deschis pentru regimurile II şi III şi închis pentru regimul I. Unele aparate permit alegerea opţiuni de alimentare cu un volum calibrat de combustibil până la reperul 3 predefininduse volumul de combustibil consumat. Se măsoară automat, sau manual cu ajutorul unui cronometru durata t, în care se consumă un anumit volum de combustibil, situiat între reperele 2 şi se determină consumul orar mediu cu relaţia:
[kg/h] 6,3t
VC ρ⋅⋅= ( 3.14)
în care: V este volumul de combustibil consumat [cm3]; r densitatea volumică a combustibilului [g/cm3]; t timpul în care s-a consumat combustibilul [s]. Dificultatea
Fig. 3.12 Scheme de aparate pentru măsurarea consumului mediu de combustibil: a – prin metoda volumetrică; b – prin metoda gravimetrică; c – prin metoda indirectă.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
100
determinării precise a densităţii combustibilului şi introducerea erorilor legate de aceasta reprezintă dezavantajul esenţial al metodei volumetrice.
Metoda este foarte simplă, iar în cazul în care măsurătorile se fac pentru perioade de timp mai mari de 2 minute eroarea de măsurare poate ajunge la 1%. Ea poate fi automatizată prin instalarea unor senzori optici de nivel a lichidului şi a unui sistem automat de comandă a robineţilor 4 şi 5. Un alt avantaj al metodei constă în faptul că aparatura poate fi adaptată foarte uşor atât pentru încercările de laborator cât şi pentru cele de parcurs.
Metoda gravimetrică – În figura 3.12,b este prezentată schematic metoda gravimetrică de măsurare a consumului orar de combustibil. Principalul avantaj al acestei metode constă în măsurarea directă a masei combustibilului consumat din rezervorul 1 cu ajutorul traductorului de masă 2. La începutul măsurătorii vasul 1 este alimentat de la rezervorul de combustibil prin robinetul 3. În timpul măsurătorilor robinetul 3 este menţinut în poziţia închis, iar alimentarea motorului se face din vasul 1. Combustibilul neconsumat este reintrodus în vasul 1 prin conducta de retur. Consumul orar de combustibil se calculează cu relaţia:
[kg/h] 6,3 21
tmmC −
⋅= ( 3.15)
în care: m1 – masa vasului cu combustibil la începutul la începutul încercării [g]; m2 – masa vasului cu combustibil la sfârşitul încercării [g]; t – timpul în care se face încercarea [s]. Şi acest sistem de măsură a consumului de combustibil poate fi automatizat prin utilizarea unui sistem electronic adecvat de comandă şi control.
Metodele indirecte – În scchema din figura 3.12,c este prezentată una dintre metodele indirecte de determinare a consumului orar de combustibil. Ca şi metoda gravimetrică şi aceasta prezintă avantajul că este măsurată masa de combustibil consumat. Un plutitor de formă cilindrică 2 este introdus în interiorul unui vas cilindric 1 şi este măsurată forţa exercitată de plutitor asupra traductrului de forţă 3. Conform principiului lui Arhimede datorită schimbării condiţiilor de plutire pe măsură ce combustibilul este consumat de motor se schimbă şi forţa exercitată de plutitor asupra traductorului 3, variaţia forţei fiind direct proporţională cu masa de combustibil consumată. Robineţii 4 şi 5 sunt de acelaşi tip şi au acelaşi rol ca şi cei utilizaţi în cazul aparatelor pentru măsurare volumetrică a consumului orar de combustibil, iar poziţiile lor de funcţionare sunt aceleaşi. La fel ca şi în cazul metodelor prezentate mai sus şi acest sistem de măsură se pretează la automatizare.
Măsurarea consumului instantaneu de combustibil – Pentru măsurarea consumului
instantaneu de combustibil se folosesc diferite tipuri de debitmetre, car pot asigura obţinerea unor măsurători cu diferite grade de precizie.
Sistemul Flo-Tron, prezentat schematic în 3.13, a este capabil să măsoare consumul orar instantaneu de combustibil al motorului cu ardere internă. Acest sistem are un răspuns foarte rapid, şi de aceia poate monitoriza consumul de combustibil în cazul regimurilor tranzitorii. Acest sistem utilizează o schemă hidraulică echivalentă cu cea a punţii Wheatstone din electricitate. Patru orificii calibrate 1 sunt legate în punte şi pompa de alimentare 2 antrenează combustibilul prin sistemul hidraulic. Când nu intră şi nu iese combustibil din puntea hidrauluică aceasta este echilibrată şi variaţia de presiune ∆p=0. Dacă prin punte trece combustibil puntea se dezechilibrează şi variaţia

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
101
de presiune ∆p dintre intrarea I şi ieşirea II este proporţională cu consumul orar instantaneu de combustibil. Consumul orar idicat de acest tip de debitmetru nu este influeţat de vâscozitatea şi de densitatea combustibilului. Eroarea aparatului poate fi redusă sub 0,5%, iar timpul de răspuns mai mic de 0,5 s la o creştere de tip treaptă a debitului de combustibil.
Debitmetrul Fisher – Porter prezentat în figura 3.13, b este un alt tip de aparat
utilizat pentru determinarea consumului orar instantaneu de combustibil în cazul în care nu se urmăreşte obţinerea unei precizii ridicate de măsurare. Acest tip de debitmetru se compune dintr-un plutitor scurt, de formă conică 2, care este liber să se mişte în interiorul unui vas transparent gradat de formă conică 1. Combustibilul care intră prin partea inferioară ridică sau coboară plutitorul datorită frecării vâscoase şi a presiuni, mărind sau micşorând secţiunea de trecere. Acest tip de debitmetru este calibrat de constructor pentru un anumit tip de combustibil şi asigură o eroare maximă de câteva procente.
Pentru corectarea rezultatelor în cazul schimbării densităţii se poate folosi factorul de corecţie determinat cu una dintre relaţiile:
( )( ) lichide)(pentru
22
11.
2
.
1
ρρρρρρ⋅−
⋅−=
p
p
m
m ( 3.16)
şi
gaze)(pentru 2
1.
2
.
1
ρρ
=m
m ( 3.17)
Fig. 3.13 Scheme de aparate pentru măsurarea consumului instantaneu de combustibil:
a – aparatul Flo –Tron; b – aparatul Fisher-Porter.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
102
unde: .
1m şi .
2m sunt debitele masice pentru fluidul cu care a fost calibrat aparatul, respectiv pentru fluidul cu care se calibrează aparatul; r1 şi r2 sunt densităţile corespunzătoare; rp este densitarea plutitorului. Simplificarea relaţiei obţinută pentru gaze s-a datorat aproximării rp>>r1 şi rp>>r2.
În cazul în care apar şi schimbări ale vâscozităţii la corecterea rezultatelor se folosesc factori de corecţie calculaţi cu una dintre relaţiile:
( )( ) lichide)(pentru
122
211.
2
.
1
γρρργρρρ⋅⋅−
⋅⋅−=
p
p
m
m ( 3.18)
şi
gaze)(pentru 12
21.
2
.
1
γργρ⋅⋅
=m
m ( 3.19)
în care γ1 şi γ2 sunt vâscozităţile pentru fluidul cu care a fost calibrat aparatul, respectiv pentru fluidul cu care se calibrează aparatul. Simplificarea relaţiei pentru gaze s-a făcut din aceleaşi considerente ca şi în cazul determinării factorului de corecţie pentru modificarea densităţii.
În practica încercărilor se mai utilizează şi alte tipuri de debitmetre cum sunt cele cu turbină, care măsoară debitul volumic cu o eroare de maxim 1%. Calibrarea acestora este puţin afectată de vâscozitate, mai ales în cazul debitmetrelor cu dimensiuni mici. Sunt caracterizate de un răspuns rapid la modificarea debitului de lichid, acesta fiind influenţat de inerţia rotorului turbinei.
În cazul motoarelor cu injecţie, o mare parte din combustibilul ce trece prin pompa
de alimentare nu este utilizat de motor, mai precis în cazul injecţiei pe benzină ceamai mare perte a combustibilului revine în rezervorul autovehiculului. În cazul măsurătorilor de laborator precise se impune folosirea unor debitmetre adecvate pe conducta de alimentere şi pe cea de retur, consumul orar de combustibil calculându-se ca diferenţă dintre cele două consumuri. Ca alternativă mai ieftină, pentru aproximarea consumului de combustibil este recircularea acestuia prin preluarea, după o prealabilă răcire în schimbătorul de căldură 1, între debitmetru şi pompa de injecţie, figura 3.14, a.
Fig. 3.14 Metode de preluare a debitului de combustibil neconsumat:
a – între debitmetru şi motor; b – direct în debitmetru.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
103
Deoarece combustibilul recirculat conţine vapori şi gaze această metodă poate introduce erori mari. Pentru eliminarea acestui inconvenient s-a recurs la preluarea returului direct în debitmetru, figura 3.14, b, în felul acesta realizându-se o mai bună ventilare a combustibilului recirculat. O soluţie similară cu aceasta este prezentată în figura 3.12, b.
3.1.5 Măsurarea temperaturilor şi a presiunilor Măsurarea temperaturilor, din motor presupune utilizarea unor termometre cu
caracteristici diferite pentru diversele măsurători efectuate la încercarea motoarelor: temperatura lichidului de răcire; temperatura uleiului; temperatura amestecului de combustibil; temperatura gazelor arse; temperatura mediului ambiant; etc. Termometrele pot fi împărţite în două grupe principale: termometre cu contact direct; termometre care măsoară de la distanţă.
Termometrele cu contact direct sunt de mai multe feluri: termometrele de dilatare; termometre manometrice; pirometre cu termocuplu; termometre cu termorezistenţă electrică; etc.
Termometrele care măsoară de la distanţă sunt: cu radiaţie totală; cu radiaţie parţială.
Măsurarea temperaturii cu termocupluri – se bazează pe legătura între forţa termoelectromotoare la bornele termocuplului şi diferenţa temperaturilor aplicate conexiunilor sale calde şi rece. Mecanismul apariţiei forţei termoelectromotoare la bornele cuplului se explică prin teoria conductibilităţii termice a metalelor. Contactul a două metale diferite permite difuzia electronilor din metalul unde aceştia se află în concentraţie superioară către metalul unde concentraţia este mai mică. Deplasarea electrozilor generează o diferenţă de potenţial între conductori. Când intensitatea câmpului electric, datorat acumulării sarcinilor electrice, ajunge suficient de mare, procesul migraţiei electronilor încetează. Domeniul de măsură posibil de investigat cu ajutorul termocuplelor este -50oC – +1800 oC.
Măsurarea temperaturii cu termorezistenţe – se bazează pe proprietatea materialelor bune conducătoare de electricitate de a-şi modifica rezistenţa electrică odată cu creşterea temperaturii. Rezistenţa electrică a metalelor, de obicei, creşte cu creşterea temperaturii. Această manifestare apare ca o consecinţă a sporirii dificultăţii deplasării electronilor prin reţeaua cristalină a metalului, deoarece temperatura amplifică oscilaţia ionilor din nodurile reţelei. Domeniul de temperaturi, posibil de investigat cu o termorezistenţă cu Pt, este -260oC - +1000oC. La temperaturi mai reduse de 500oC, Pt este inertă în majoritatea mediilor, cu excepţia C, vaporilor de Si, K, Na. Pentru limita superioară (1000oC) materialul devine casant. Materialele pure răspund favorabil majorităţii solicitărilor enumerate, frecvent fiind utilizate Pt, Cu, Ni.
Măsurarea presiunilor – presupune utilizarea unor traductoare de presiune
adecvate pentruefectuarea măsurătorilor în diferite puncte de lucru: în instalaţia de ungere; în diferite puncte ale instalaţiei de alimentare, în spacial în cazul motoarelor cu alimentare prin injecţie; în colectorul de admisie; în mediul exterior; în interiurul cilindrilor pentru trasarea diagramei indicate; etc.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
104
Deosebim trei categorii principale de aparate de măsurare a presiunii: Manometre metalice, care pot fi cu tub, cu membrană sau cu burduf; Manometre cu lichid, care pot fi cu tub U, cu coloană, cu tub înclinat, cu plutitor sau
cu balanţă inelară; Traductoare de presiune, care pot fi: piezoelectrice, tensometrice sau capacitive.
În cercetarea experimentală a motoarelor se folosesc de obicei traductoare specializate şi manometre cu lichid, care au o precizie ridicată, manometrele metalice fiind utilizate în exploatare ca instalaţii de bord.
3.1.6 Echiparea unui stand de încercări motoare Pentru realizarea experimentelor complexe prevăzute pentru un motor cu aprindere
prin scânteie clasic, a fost concepută o schemă generală de stand de încercări. Standul de încercări are în componenţă următoarele instalaţii şi echipamente de măsură, figura 3.15:
frână hidraulică sau electrică 1; instalaţie pentru determinarea consumului de combustibil; barometru şi termometru pentru determinarea condiţiilor atmosferice; traductor optic de p.m.s, folosit şi pentru determinarea turaţiei reale 4; traductor declanşare scânteie electrică 5; vacuummetru pentru determinarea depresiunilor din colectorul de admisie 2; traductor potenţiometric pentru determinarea deschiderii clapetei obturator 6; traductor temperatură gaze de evacuare (termocuplu) 7;
Fig. 3.15 Schemă de echipare a unui stand de încercare motoare cu aprindere prin scânteie.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
105
analizor de gaze (NOx, CO, CO2, O, HC, λ) 8; traductor piezoelectric pentru măsurarea variaţiei presiunii în cilindrul nr. 1, 3; amplificator de sarcină 9; sistem automat de achiziţie de date 10.
3.2 Încercarea şi omologarea transmisiei
3.2.1 Noţiuni generale privind încercarea transmisiei Scopul cercetării experimentale a transmisiei autovehiculului în ansamblu şi a
subansamblurilor acesteia este de a pune în evidenţă calităţile constructive şi de exploatare ale acestora pentru a valida proiectul sau procesul tehnologic de fabricaţie sau reparaţie. Pentru aceasta este necesar să se efectueze atât încercări pe parcurs cât şi încercări de laborator. Regimurile de încercare în condiţii de laborator sau de poligon se determină pornind de la datele culese la încercările efectuate în condiţii de exploatare, astfel încât condiţiile de încercare să fie similare cu cele de exploatare, iar parametrii determinaţi să reflecte realitatea specifică utilizării autovehiculului în condiţi normale.
Transmisia în ansamblui, sau componentele acesteia: ambreiajul, cutia de viteze, cutia de distribuţie, transmisia cardanică şi puntea motoare pot fi încercate pe standuri specializate echipate cu aparatură de comandă, măsurare, înregistrare şi prelucrare a datelor adecvate scopului şi obiectivelor urmărite prin încercare.
Dintre obiectivele principale urmărite la încercarea transmisiilor şi a componentelor
acesteia pot fi enumerate următoarele: determinarea momentului maxim transmis; determinarea pierderilor de putere şi a randamentului la diferite regimuri de
încercare; determinarea nivelului de zgomot şi a vibraţiilor produse în timpul funcţionării; determinarea deformaţiilor arborilor şi a carcaselor; determinarea turaţiilor critice ale arborilor cardanici şi echilibrarea lor; determinarea rezistenţei la uzură; determinarea parametrilor de apreciere a durabilităţii şi a fiabilităţii; stabilirea regimului termic; stabilirea lubrifiantului optim pentru fiecare ansamblu pentru atingerea eficienţei
maxime a ungerii; verificarea corectitudinii angrenării; verificarea mecanismelor de cuplare şi de zăvorâre a treptelor de viteze; verificarea etanşărilor; verificarea lagărelor; etc.
În cazul în care rezultatele cercetăriilor experimentale nu sunt favorabile din
buletinul de încercare trebuie să rezulte cauzele care au condus la deteriorarea şi scoaterea prematură din uz a componentei încercate, precum şi regimurile de sarcină la care s-a produs distrugerea acesteia.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
106
O categorie aparte de încercări ale transmisiei sunt încercările de cercetare, care urmăresc îmbunătăţirea şi/sau modernizarea transmisiilor prin:
încercarea unor tipuri noi de transmisii în vederea adaptării lor la cerinţele impuse de exploatarea autovehiculelor moderne;
promovarea unor noi tipuri de lubrifianţi cu caracteristici superiori celor utilizaţi în prezent;
promovarea unor piese din materiale cu caracteristici optime care să asigure o fiabilitate mai ridicată şi/sau un preţ de cost mai scăzut;
verificarea pe cale experimentală a unor ipoteze teoretice legate de femomenele care au loc în organele transmisiei.
Randamentul transmisiei, ηtr, este parametrul principal care caracterizează
eficienţa acesteia. Acesta este definit ca raport dintre puterea transmisă la roţile motoare PR şi puterea efectivă a motorului Pe şi se catculează cu relaţia:
e
c
e
ce
e
Rtr P
PPPP
PP
−=−
== 1η , ( 3.20)
unde Pc reprezintă pierderea de putere în transmisie. Determinarea randamentului transmisiei se face pe standuri speciale de încercare
pentru transmisia în ansamblu sau separat pentru fiecare dintre componentele acesteia. În cazul determinării separate a randamentului este pusă în evidenţă ponderea randamentului fiecărei componente în randamentul total al transmisiei, care se calculează cu o relaţie de forma:
tfotccdcvatr ηηηηηηη ⋅⋅⋅⋅⋅= , ( 3.21) în care: ηa este randamentul ambreiajului; ηcv - randamentul cutiei de viteze; ηcd - randamentul cutiei de distribuţie; ηtc - randamentul transmisiei cardanice; ηo - randamentul reductorului central; ηtf - randamentul transmisiei finale.
În cazul transmisiilor mecanice pierderile mari apar în subansamblurile transmisiei care au în componenţă angrenaje.
Pierderile de putere în transmisiile cu roţi dinţate pot fi grupate în: pierderi care depind de valoarea momentului transmis: pierderi care nu depind de momentul transmis. Din prima grupă fac parte pierderile datorate frecării dintre dinţii roţilor dinţate şi într-o măsură mai mică pierderile datorate frecărilor din lagăre. Din cea de a doua grupă fac parte pierderile datorate barbotării uleiului, care depind în special de turaţia pieselor din transmisie. La un regim de turaţie şi temperatură constant, indiferent de momentul transmis, aceste pierderi rămân constante.
Pentru o transmisie cu roţi dinţate care asigură realizarea unui raport de transmitere constant i relaţia dintre momentul la intrare M1 şi momentul la ieşire M2 este următoarea:
μMiMM −⋅= 12 , ( 3.22) unde Mμ este momentul pierdut prin frecare, care poate fi aproximat cu o relaţie de forma:
( ) ( ) 24
43
32
214
43
32
21 MncncncnccnbnbnbnbbM oo ⋅⋅+⋅+⋅+⋅++⋅+⋅+⋅+⋅+=μ ( 3.23) în care: bo, b1, b2, b3, b4, co, c1, c2, c3, c4 sunt coeficienţii polinoamelor de aproximare, dependenţi de construcţia transmisiei cu roţi dinţate şi de temperatura uleiului din transmisie; n este turaţia de antrenare a transmisiei cu roţi dinţate.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
107
Notând cu: ( ) ( ) ( ) ( )4
43
32
214
43
32
21 ncncncnccnCşinbnbnbnbbnB oo ⋅+⋅+⋅+⋅+=⋅+⋅+⋅+⋅+= , polinoamele de ordin patru utilizate pentru aproximarea momentului pierdut în transmisie Mμ se obţine pentru momentul la ieşire din transmisie M2, relaţia:
( )( )nCnBMiM
+−⋅
=1
12 , ( 3.24)
iar pentru momentul pierdut prin frecare Mμ: ( )( )
( )( ) iMnCnC
nCnBM ⋅⋅
++
+= 111μ . ( 3.25)
Analizând relaţia 3.25 rezultă că pierderile de moment de torsiune din transmisia mecanică cu roţi dinţate Mμ, au o variaţie liniară funcţie de momentul de antrenare în cazul funcţionării în regim termic şi de turaţie constant, figura 3.16. În acest caz apare o pierdere de moment constantă A1(n)=B(n)/(1+C(n)) şi o pierdere proporţională cu raportul de transmitere i şi momentul de antrenare M1, cu coeficientul de proporţionalitate A2(n)=C(n)/(1+C(n)).
Introducând relaţia 3.24 în relaţia de definiţie a randamentului pentru o transmisie
cu roţi dinţate rezultă:
( )( )( ) iMnCnB
nCMiM
⋅⋅
+−
+=
⋅=
11
2 111
1η ( 3.26)
Relaţia 3.26 mai poate fi pusă şi sub forma:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
−⋅−=iMnBtg
1
)(11 αη 3.27)
unde: B(n) reprezintă pierderile la mersul în gol; α - unghiul format de dreapta momentului pierdut prin frecare şi axa momentului de antrenare.
0 40 80 120 160 2000,5
0,6
0,7
0,8
0,9
1
0
4
8
12
16
20
n= 3000 rot/min
n=2000 rot/min
n=1000 rot/min
n=1000 rot/min
n=2000 rot/min
n=3000 rot/min
1cv
μ
M
M/i
η
[Nm]
[Nm
]
Cutie cu patru trepte pentru autoturism treapta a III a
0 40 80 120 160 2000,5
0,6
0,7
0,8
0,9
1
0
4
8
12
16
20
1cvM [Nm]
η
M/i
[Nm
]
Cutie cu patru trepte pentru autoturism treapta a IV a
n=1000 rot/min
n=2000 rot/min
n=2000 rot/minn=1000 rot/min
n=3000 rot/min
n=3000 rot/min
μ
Fig. 3.16 Variaţia momentului pierdut prin frecare şi a randamentului în cazul unei cutii de viteze cu trei
arbori pentru autoturism, treapta a III a şi treapta a IV a.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
108
Analizând relaţiile 3.26 şi 3.27, rezultă că pentru cazul funcţionării în regim termic şi de turaţie constant, randamentul transmisiei mecanice cu roţi dinţate are o variaţie hiperbolică, figura 3.16, şi anume valoarea randamentului se reduce prin micşorarea cuplului transmis. Calitatea şi temperatura uleiului, influenţează în mare măsură atât pierderile mecanice cât şi pe cele hidraulice. Randamentul transmisiei mai depinde şi de nivelul uleiului din carter.
3.2.2 Incercarea ambreiajului Conform rolului pe care îl indeplineşte în cadrul transmisiei şi a condiţiilor de
funcţionare, încercarea ambreiajului presupune atingerea parţială sau în totalitate a următoarelor obiective principale: determinarea cuplării line, fără şocuri a ambreiajului; gradul de patinare; momentul maxim transmis; capacitatea de filtrare a oscilaţiilor de torsiune transmise de motorul cu ardere internă; uzura garniturilor de fricţiune şi fiabilitatea ambreiajului în ansamblu; regimul termic din timpul funcţionării.
Datorită faptului că evaluarea fiabilităţii şi compararea durabilităţii diferitelor ambreiaje şi garnituri de fricţiune este dificil de stabilit prin încercări în condiţii reale de exploatare, încercarea ambreaiajelor se face de obicei pe standuri, obţinându-se în felul acesta rezultate mai precise într-un timp mai scurt. Standurile moderne de încercare au capacitatea de a simula cât mai exact condiţiile din timpul exploatării şi de a permite accelerarea încercărilor fără a perturba rezultatele obţinute.
Principalii parametrii care se determină la încercarea ambreiajelor mecanice sunt: momentul transmis; turaţia arborelui conducător; turaţia arborelui condus; numărul de cuplări şi decuplări; timpii de cuplare şi de decuplare; intensitatea cuplării şi a decuplării; temparatura în diferite puncte ale ambreiajului.
În figura 3.17 este prezentat schematic un stand universal de încercare a
ambreiajelor, care poate simula diferite regimuri de exploatare, asigurând în felul acesta condiţii de încercare similare condiţiilor reale de exploatare. Motorul electric 2, echipat cu regulatorul 1, care are rolul de a menţine constantă turaţia antrenează arborele
Fig. 3.17 Stand universat pentru încercarea ambreiajului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
109
conducător 4 prin intermediul cuplajului 3. Puterea şi turaţia motorului electric trebuie să corespundă cu cele ale mătorului cu ardere internă care echipează autovehicului al cărui ambreiaj se încearcă. Pe arborele conducător este montat un excitator 5, care constă într-un dispozitiv cu mase elestice suspendate elastic, care generează un moment pulsator prin care sunt simulate oscilaţiile torsionale produse în timpul funcţionării motorului cu ardere internă. Partea condusă a ambreiajului de încercat 6 este montată pe arborele condus 7, pe care sunt montate şi masele inerţiale scimbabile 15, 16 şi 17, care reproduc inerţia maselor în mişcare de rotaţie şi translaţie ale autovehiculului al cărui ambreiaj este supus încercării. Frâna 13 realizează un moment rezistent constant corespunzător rezistenţei totale a drumului. Standul mai poate fi echipat şi cu frână aerodinamică care să simuleze rezistenţa aerului. Frâna 14 este folosită la oprirea periodică a întregului sistem. Decuplarea periodică a ambreiajului încercat 6 şi cuplarea frânei 14 se face cu ajutorul motorului electric 23, prin intermediul amgrenajelor melcate 21 şi 20 şi a pârghiilor 22 şi 19.
Valoarea momentului transmis la arborele condus al ambreiajului şi variaţia acestuia la cuplarea şi decuplarea ambreiajului este pusă în evidenţă de sistemul de măsură format din traductorul de moment 10, amplificatorul 12, şi de aparatul de înregistrare 11.
Dispozitivul dinamonetric 8 indică momentul absorbit de frâna 13, iar modificarea momentului de frânare se face prin roata 9 şi sistemul de pârghii aferent dispozitivului dinamometric.
Turaţia părţii conduse se măsoară cu ajutorul tahometrului 18. În timpul încercării momentul de torsiune constant dezvoltat de motorul electric este
transformat de către xcitator într-un moment cu variaţie periodică, care, prin intermediul ambreiajului încercat până când acesta ajunge la turaţia arborelui conducător. În acest moment se termină un ciclu de încercare, pârghia 22 decuplează ambreiajul iar pârghia 19 cuplează frâna 14. Ciclurile de încercare se repetă succesiv până la finalizarea programului de încercare, care a fost stabilit în concordanţă cu scopul încercării. Încercarea dinamică, complexă, a ambreiajelor impune solicitarea acestora în condiţii cât mai apropiate de cele reale, din exploatare. Durabilitatea acestor cuplaje şe determină prin repetarea încercărilor până la 60 000 cicluri.
În figura 3.18 sunt prezentate fazele unui ciclu de încercare. În graficul I este prezentată cu linie continuă variaţia turaţiei părţii conduse şi cu linie întreruptă cea a părţii conducătoare, în graficull II este prezentată variaţia deplasării discului de ambreiaj, iar în graficul III cea a deplasării saboţilor frânei 14.
În cazul în care se doreşte studierea variaţiei temperaturii în diferite puncte ale ambreiajului, se montează termocuple iar instalaţia va fi completată cu toată aparatura de măsură şi înregistrare.
Dacă se urmăreşte evoluţia uzurii în timp, după un anumit număr de cicluri se fac măsurători ale componentelor aflate în frecare.
Pentru a pune în evidenţă regimul de cuplare a ambreiajului se înregistrează creşterea momentului transmis prin ambreiaj la cuplarea acestuia. Pentru aceasta se utilizează un traductor de moment şi aparatura de măsură şi înregistrare adecvată.
Pentru măsurarea momentului maxim transmis prin ambreiaj, moment utilizat pentru calculul coeficientului de rezervă al ambreiajului se măreşte continuu momentul de frânare până când ambreiajul începe să patineze. Punerea în evidenţă a patinării se

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
110
face măsurând în acelaşi timp viteza unghiulară a arborelui conducător şi a celui
Fig. 3.18 Fazele unui ciclu de încercare a ambreiajului.
Fig. 3.19 Curbe caracteristice materialelor de frecare pentru garnituri de fricţiune.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
111
condus. În figura 3.19 sunt prezentate câteva curbe caracteristice ale ambreiajelor şi ale
materialelor de fricţiune determinate pe cale experimentală.
3.2.3 Încercarea cutiei de viteze
Conform rolului pe care îl indeplineşte în cadrul transmisiei şi a condiţiilor de funcţionare, încercarea cutiei de viteze presupune atingerea parţială sau în totalitate a următoarelor obiective principale: determinarea randamentului şi a pierderilor de putere la diferite sarcini şi la diferite turaţii; determinarea caracteristicii de temperatură; determinarea mărimii, poziţiei şi caracterului petei de contact la funcţionarea sub sarcină; determinarea nivelului de zgomot şi a vibraţiilor produse în timpul funcţionării; determinarea deformaţiilor de torsiune şi încovoiere a arborilor; determinarea rezistenţei la oboseală a roţilor dinţate; determinarea durabilităţii rulmenţilor; derterminarea rezistenţei la uzură a principalelor piese; determinarea calităţii şi a fiabilităţii etanşărilor; stabilirea calităţii şi a fiabilităţii sincronizatoarelor; determinarea fiabilităţii globale a cutiei de viteze; funcţionarea mecanismului de comandă; încercări pentru validarea înlocuirii unor materiale sau lubrianţi; etc.
Funcţie de obiectivele cercetării şi de dotarea institulului de cercetare care efectuează încercările, cutiile de viteze pot fi testate direct pe autovehicul sau pe standuri speciale în condiţii de laborator. Încercarea pe standuri trebuie să asigure reproducerea regimurilor din exploatare astfel încât rezultatele obţinute în urma acestora să coincidă cu cele obţinute în condiţii reale de exploatare.
Dotarea unui stand de încercare pentru cutii de viteze trebuie să permită: măsurarea momentului de torsiune la întrarea şi la ieşirea din cutia de viteze; măsurarea vitezei unghiulare la intrarea în cutia de viteze şi la ieşirea din ea şi reglarea acesteia astfel încât să fie acoperit întreg domeniu de funcţionare; menţinerea regimului termic optim cu o toleranţă de ±5oC la temperatura uleiului; reglarea şi măsurarea momentului la care se face încercarea în limita a ±1%; înregistrarea numărului de schimbări de viteze şi a timpilor de funcţionare în fiecare treaptă de viteze; etc. Prin urmare echipamentele de măsură ale standurilor trebuie să cuprindă: termometru pentru determinarea temperaturii uleiului din carter, cu precizie de ±2%; manometru pentru determinarea presiunii uleiului din carter, cu precizie de ±2%; tahometre pentru măsurarea turaţiei de acţionare a cutiei de viteze şi a frânei, cu precizie de ±1%; contor de rotaţii, cu precizie de ±0,5%. În afara acrestor dotări minime sunt necesare şi alte aparate de măsurare cum sunt: osciloscoape; sonometre; vibrometre; etc.
Metodele de ncercare a cutiilor de viteze pe stand se clasifică în: Metoda de încercare în flux de energie deschis; Metoda de încercare în flux de energie închis.
Metoda de încercare în flux de energie deschis - Standurile construite după
principiul fluxului de energie deschis trebuie să îndeplinească următoarele cerinţe: puterea nominală a motorului de antrenare trebuie să fie minim egală cu cea a motorului care echipează grupul motopropulsor din care face parte cutia de viteze; turaţia motorului de antrenare trebuie să se regleze continu şi să acopere întreaga

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
112
gamă de turaţii la care lucrează cutia de viteze; instalaţia de frânare trebuie să fie astfel dimensionată încât să permită simularea rezistenţelor la înaintare în toate treptele de viteze; aparatura de măsură cu care este dotat standul trebuie să permită măsurarea momentului de torsiune la intrarea în cutia de viteze şi la ieşirea din aceasta.
Schema de principiu a unui stand de încercare cutii de viteze în flux de energie
deschis este prezentată în figura 3.20 şi se compune din motorul electric de antrenare 1, a cărui stator este liber în lagăre şi poate oscila cu unghiuri mici în jurul poziţiei de echilibru, ambreiajul 2, care are şi rolul de cuplaj de siguranţă la apariţia suprasolicitărilor, cutia de viteze de încercat şi frâna 4. La fel ca şi în cazul standurilor de încercare a motoarelor ca element de frânare se poate folosi un generator electric cu stator oscilant sau o frână hidraulică. În cazul utilizării generatorlui electric pe post de frână energia creată se debitează într-o reţea electrică sau se descarcă pe o rezistenţă variabilă. Funcţie de caracteristicile motorului 1 şi ale frânei 4, ambreiajul 2 poate să lipsească, schema din figura 3.21.
În cazul motoarelor şi frânelor cu stator oscilant, măsurarea momentului M1, transmis de motorul de antrenare 1 şi a momentului de frânare M2 generat de frâna 4 se face prin echilibrarea statoarelor cu forţele G1 şi G2 care acţonează la braţele r1 şi r2, figura 3.21. Legarea cutiei de viteză de încercat 3 se face cu ajutorul cuplajelor de siguranţă 2. Pentru a determina puterile şi a stabili pierderea de putere se măsoară viteza unghiulară de antrenare w1 şi cea de la ieşirea din cutia de viteze w2.
Expresiile momentelor şi puterilor la intrarea şi la ieşirea din cutia de viteze sunt:
Fig. 3.20 Schema unui stand de încercare cutii de viteze în flux de energie deschis.
Fig. 3.21 Schema unui stand de încercare cutii de viteze în flux de energie deschis echipat cu motor de antrenare şi frână cu stator oscilant.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
113
111111111 ωω ⋅⋅=⋅=⋅= rGMPrGM ( 3.28) respective:
cvirGrGMPrGM 122
222222222 ωωω
⋅⋅=⋅⋅=⋅=⋅= ( 3.29)
iar pierderea de putere în cutia de viteze ∆P este:
122
11122
11121 ωω
ω ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅−⋅=
⋅⋅−⋅⋅=−=Δ
cvcv irGrG
irGrGPPP ( 3.30)
cu icv s-a notat raportul corespunzător treptei încercate din cutia de viteze. Randamentul cutiei de viteze ηcv se determină cu următoarea relaţie:
cvcv irG
rGPP
⋅⋅⋅
==11
22
2
1η ( 3.31)
Dezavantajul principal al standurilor prezentate în figurile 2.20 şi 3.21 constă în faptul că datorită faptului că cutiile de viteze sunt amplificatoare de cuplu, raportul de transmitere este supraunitar cu excepţia prizei directe şi a supraprizei, iar momentul M2, de frânare, este mai mare decât M1, motiv pentru care frâna electrică sau cea hidraulică va avea dimensiuni mari.
Pentru micşorările dimensiunilor elementului de frânare, în practica încercărilor se utilizează cutia de viteze auxiliară 4, figura 3.22, care nu trebuie să fie identică cu cea de încercare 2. În cazul acestei scheme pierderile proprii din cutia de viteze se cumulează cu celeale ale cutiei de viteze auxiliare, fiind refletate în momentul de frânare M2=G2r2.
Pierderile de putere şi randamentul cutiei de viteze încercate se determină cu ajutorul relaţiilor 3.30 şi 3.31. Între turaţia elementului de frânare n3 şi turaţia la intrarea în cutia de viteze n1 şi cea de la ieşirea din aceasta n2, există următoarea dependenţă:
cvacv
ininn ⋅== 3
12 ( 3.32)
unde: icv este raportul de transmitere al cutiei de viteze; icva - raportul de transmitere al cutiei de viteze auxiliare.
Fig. 3.22 Schema unui stand de încercare cutii de viteze în flux de energie deschis cu cutie auxiliară pentru multiplicarea turaţiei frânei.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
114
Datorită faptului că pierderea de putere ∆P este foarte mică în comparaţie cu pierderea de antrenare P1 şi cea de frânare P2, în cazul folosirii schemelor din figurile 3.21, 3.22, precizia determinării randamentului este nesatisfăcătoare.
Pentru a îmbunătăţii precizia de determinare a randamentului cutiei de viteze ηcv şi
pierderilor de putere din aceasta ∆P se recomandă utilizarea unui stand de încercare construit după schema din figura 3.23. În acest caz elementul de frânare 5 este un generator electric cu stator fix, iar cutia de viteze de încarcare 3 se fixează pe un cadru oscilant 4 care este echilibrat cu greutatea Gr , amplasată la braţul de pârghie rr. Pentru realizarea legăturilor dintre generatorul 1 şi cutia de viteză 3 şi dintre aceasta şi frâna 4 se utilizează cuplajele 2. În timpul încercării datorită momentului transmis cutia de viteze 3 împreună cu cadrul oscilant are tendinţa să se rotească faţă de poziţia de echilibru, menţinerea în poziţia de echilibru realizându-se prin modificarea greutăţi Gr sau a braţului rr la care acţionează acesta. O altă metodă de menţinere a poziţiei de echilibru este utilizarea unui traductor de forţă a cărui deformaţie este neglijabilă.
Pornind de la relaţia de echilibru a puterilor: cvPP η⋅= 12 ( 3.33)
şi de la relaţia de definiţia a acestora: cvMM ηωω ⋅⋅=⋅ 1122 ( 3.34)
înlocuind icv=w1/w2 se obţine: cvcviMM η⋅⋅= 12 ( 3.35)
în care P1, P2 sunt puterile la intrare, respectiv la ieşirea din cutia de vitaze; M1, M2 sunt momentele la intrare, respectiv la ieşirea din cutia de viteze; w1, w2 - vitezele unghiulare la intrarea, respectiv la ieşirea din cutia de viteze; icv - raportul de transmitere al cutiei de viteze pentru treapta încercată; ηcv - randamentul cutiei de viteze pentru treapta încercată.
Echilibrul static pentru sistemul din figura 3.23. este:
Fig. 3.23 Schema standului pentru încercarea cutiei de viteze cu montare pe cadru oscilant.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
115
21 MMM r =+ ( 3.36) respectiv:
cvcvr iMMM η⋅⋅=+ 11 ( 3.37) de unde rezultă randamentul cutiei de viteze:
cv
rr
cv
rcv irG
rGiM
M 1111111
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅
−=⋅⎟⎟⎠
⎞⎜⎜⎝
⎛+=η ( 3.38)
Pornind de la relaţia de definiţie a randamentului:
1
1
PPP
cvΔ−
=η ( 3.39)
se poate determina pierderea de putere ∆P din cutia de viteze cu relaţia: ( ) ( ) 1111 11 ωηη ⋅⋅⋅−=⋅−=Δ rGPP cvcv ( 3.40)
Un astfel de stand se pretează la încercare acutiilor de vitaze cu trei arbori şi a cutiilor de viteze cu doi arbori cu o singura ieşire spre puntea din spate.
Datorită faptului că în cazul standului prezentat în figară 3.23. trebuie utilizat un
generator de frânare de dimensiuni mari, se recurge la folosirea unor standuri construite după schema din figura 3.24, unde pe cadrul osciland 4 se montează cutiile identice 3 şi 6. Arborii de ieşire ale celor două cutii de viteze se leagă între ei prin intermediul transmisiei bicardanice 5, arborele primar al cutiei de viteze 3 se leagă la motorul de antrenare 1 prin cuplajul 2, iar cel al cutiei de viteze 6 se leagă cu generatorul de frânare cu stator fix 7.
Pornind de la relaţia de echilibru a puterilor şi de la ipoteza că randamentele cutiilor de viteze 3 şi 6 sunt egale rezultă:
212 cvPP η⋅= ( 3.41)
respectiv: 2
1122 cvMM ηωω ⋅⋅=⋅ ( 3.42) ţinând seama că w1=w2 deoarece cutiile funţionează în aceeaşi treaptă de viteză şi arborele de ieşire din cutia de viteze 3 este cuplat cu cel de ieşire din cutia 6 rezultă:
Fig. 3.24 Schema standului pentru încercare pentru două cutii de viteze identice montate pe cadru oscilant.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
116
212 cvMM η⋅= ( 3.43)
de unde se poate determina expresia randamentului ηcv:
1111
2 11rGrG
MM
MM rrr
cv ⋅⋅
−=−==η ( 3.44)
în care: P1, P2 sunt puterile la intrarea în cutia de viteze de încercare, respectiv la ieşirea din cutia de viteze auxiliare; M1, M2 - momentele la intrarea în cutia de viteze de încercare, respectiv la ieşirea din cutia de viteze auxiliare; w1, w2 - vitezele unghiulare la intrarea în cutiade viteze de încercare, respectiv la ieşirea din cutie de viteze auxiliare; ηcv - randamentul cutiilor de viteze; Mr - momentul care acţionează asupra cadrului oscilant; G1 - forţa de echilibrare a statorului motorului de antrenare 1 care acţionează la braţul r1; Gr - forţa de echilibrare a cadrului oscilant, care acţionează la braţul rr.
Indiferent de tipul de stand utilizat, în cazul metodei de încercare în flux de energie deschis motoarele de antrenare şi elementele de frânare trebuie sa aibă puteri mari, cel puţin egale cu puterea maxima pe care o transmite cutia de viteze de încercat. Energia dezvoltată de elementul de frânare, de obicei, se pierde deoarece recuperarea sub forma enegiei electrice debitate la reţea a acesteia este posibilă numai prin utilizarea unor instalaţii complexe formate dintr-un grup de maşini electrice după schema Ward-Lconard sau dintr-un invertor cu tiristoare.
Metoda încercării în flux de energie închis - Acastă metodă prezintă avantajul unui
consum de energie redus în comparaţie cu metoda în flux deschis, motiv pentru care se utilizează mai ales în cazul încercărilor de lungă durată. În principiu, la acest tip de încercare, se utilizează două ansambluri sau subansambluri identice (unul de încercare şi unul de serviciu), care se cuplează cinematic între ele formând un circuit închis. Solicitarea elementului încercat se realizează cu ajutorul unor dispozitive sau mecanisme de încărcare. Motorul electric de antrenare debitează în acest caz numai energia necesară pentru acoperirea pierderilor din subansamblul încercat, cel de serviciu şi din elementele de legătură, obţinându-se un consum de energie mult redus în comparaţie cu metoda de încercare în flux deschis.
În afară de cerinţele impuse standurilor pentru încercarea cutiilor de viteze în flux deschis, standurile în flux închis mai trebuie să îndeplinească următoarele cerinţe suplimentare: puterea nominală a motorului de antrenare trebuie să fie minim 15%-25% din puterea de antrenare a cutiei de viteze pe autovehicul; elementele şi mecanismele de închidere ale circuitului trebuie astfel proiectate încât să reziste în timpul încercărilor; dispozitivele utilizate pentru încărcarea subansamblului încercat trebuie să asigure întreaga gamă de solicitări întâlnite în exploatare şi să poată fi echipate cu traductoare de turaţie şi moment; să permită comanda automată după programul de încercare impus.
După felul în care se realizează fluzul închis de energie, standurile de încercare se clasifică în:
Standurile mecanice, lacre fluxul de energie se transmite prin elemente mecanice; Standurile electromecanice, la care fluxul de energie se transmite parţial prin
elemente mecanice, parţial prin elemente electrice.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
117
Datorită faptului că sunt mai simple şi mai uşor de realizat standurile mecanice sunt cele mai răspândite. Standurile moderne permit simularea condiţiilor de exploatare şi au un grad foarte mare de universaliate, cu modificări minime pot fi folosite pentru încercarea diferitelor subansambluri din componenta transmisiei.
Standurile de încercare în flux de energie închis mai pot fi clasificate în funcţie de: dispozitivele de încercare; modul de amplasare al subansamblului încercat; metodele de măsurare; destinaţie; etc.
În figura 3.25 este prezentată schema unui stand de încercare cutii de viteze cu flux
de energie închis. Motorul electric cu rotor oscilant 1 antrenează, prin intermediul ambreiajului 2 (care are şi rol de cuplaj de siguranţă), întreg circuitul închis al standului. Acesta este format din cutia de viteze de încercare 6, care este fixată pe un cadru oscilant, cutia de serviciu 8, reductoarele de legătură 5 şi 7, care au rapoarte de transmitere egale, şi dispozitivul de încărcare 3, care crează un moment de torsiune permanent între arborele de intrare 4 şi arborele de ieşire tubular 9.Arborii primari ai cutiei de viteze sunt cuplaţi cu arborii reductorului 5, iar cei secundari cu arborii reductorului 7, prin intermediul cuplajelor elastice 10, astfel încât cutia de serviciu 8 să se rotească în sens invers celei de încercat 6. Valoarea momentului de torsiune poate fi controlată cu ajutorul unui traductor montat în celula de torsionare 3. Notând momentul de răsucire introdus prin celula de torsiune Mt, momentul la intrarea în cutia de viteze MI se determină cu relaţia:
tI MrGM +⋅= 11 ( 3.45) Pornind de la relaţia de echlibru între momentul care intră în cutia de viteze MI şi
care iese MII: IIrI MMM =+ ( 3.46)
respectiv: cvcvIrI iMMM η⋅⋅=+ ( 3.47)
rezultă relaţia de calcul a randamentului cutiei de viteze:
Fig. 3.25 Schema standului pentru încercarea cutiei de viteze cu flux de energie închis.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
118
cvt
rr
cvI
r
cvI
rIcv iMrG
rGiM
MiMMM 1111
11
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅⋅
−=⋅⎟⎟⎠
⎞⎜⎜⎝
⎛−=
⋅+
=η ( 3.48)
Pierderea de putere din cutia de viteză ∆P se calculează cu relaţia: ( ) ( ) ( ) 11111 ωηη ⋅+⋅⋅−=⋅−=Δ tcvIcv MrGPP ( 3.49)
În cazul în care cutia de viteze nu este montată pe cadru oscilant, schema 3.25 va fi completată cu două traductoare de cuplu care măsoară momentele la intrarea şi la ieşirea din cutia de viteze încercată.
În funcţie de locul din laboratorul de încercare şi de gradul de universalitate al standului pot fi concepute şi alte variante de amplasare cum sunt: în plan vertical; în linie; etc.
Pe standurile de încercare prezentate pot fi efectuate diferite tipuri de încercări, funcţie de obiectivele acestora, fiind alese programele optime de încercare.
Spre exemplu în cazul încercărilor de fiabilitate, când se urmăreşte stabilirea duratei de viaţă a cutiei de viteze până la apariţia primei defectări, poat fi urmărite şi uzurile pieselor pe parcursul încercării. Acest lucru poate fi realizat prin demontarea repetată după anumiţi timpi de încercare şi măsurare dimensiunilor şi masei pieselor, sau prin determinarea cantităţii de fier din uleiul de transmisie, metodă mai puţin precisă.
În cazul încercărilor pentru stabilirea nivelului de zgomot, se folosec sonometre care permit înregistrarea fenomenelor acustice, iar încercările se efectuează în camere izolate acustic. În urma acestor încercări se pot stabili legături dintre: calitatea de execuţie şi nivelul de zgomot; nivelul de zgomot şi gradul de uzură; forma spectrului acustic şi componenta deteriorată, stabilindu-se metode de diagnosticare calitativă şi cantitativă pe cale acustică; etc. Similar cu acestea pot fi dezvoltate încercări pentru stabilirea nivelului de vibraţii produse de funcţionarea cutiei de viteze. Pentru aceasta cutia de viteze încercată este echipată suplimentar cu traductoare de acceleraţie adecvete amplasate în punctele optime pentru stabilirea spectrelor de vibraţie. În baza acestor rezultate pot fi obţinute informaţii simeilare cu cele obtinute la încercările pentru determinarea nivelului de zgomot.
În afară de probele mai sus menţionate cutiile de viteze mai sunt supuse unor probe pentru stabilirea: forţelor la cuplarea treptelor de viteze; caracteristicii de încălzire; rigidităţii arborilor; calităţii etanşărilor; calităţii lagărelor; etc.
3.2.4 Încercarea transmisiiolor cardanice
Obiectivele încercării transmisiei cardanice sunt: determinarea randamentului şi a pierderilor; determinarea turaţiei critice; determinarea regimului termic; determinarea uzurii pieselor; etc. Înainte de încercare transmisia cardanică se controlează riguros să respecte toate prescripţiile din documentaţia de execuţie referitoare la: cordoanele de sudură; montaj; echilibrare; etc.
La fel ca şi celelalte subansamble ale transmisiei şi transmisia cardanică poate fi încercată pe standuri cu flux de energie deschis sau închis, de diferite tipuri.
În schema din figura 3.26 este prezentat un stand cu flux de energie deschis pentru determinarea pierderilor din transmisiile cardanice. Transmisia cardanică 3 este antrenată de motorul electric de curent continuu cu stator oscilant 1, prin intermediul

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
119
cuplajului 2. Generatorul electric cu stator oscilant 5, legat de partea condusă a arborelui cardanic prin cuplajul 4, asigură momentul rezistent. Pentru a încerca transmisii cardanice de diferite lungimi şi la diferite unghiuri de înclinare α motorul electric 1 şi generatorul de frânare 4 se montează pe suporţi care culisează după direcţia x şi y. Dacă standul nu este echipat cu un motor electric cu turaţie variabilă care să permită încercarea transmisiei cardanice la turaţii diferite se poate monta o cutie de viteze cu randament cunoscut.
Pentru determinarea randamentului transmisiei cardanice, se măsoară momentele M1 şi M2 prin echilibrarea statoarelor motorului şi generatorului cu ajutorul greutăţilor G1, respectiv G2. Randamentul se calculează cu relaţia:
11
22
1
2
11
22
1
2
rGrG
MM
MM
PP
⋅⋅
==⋅⋅
==ωω
η ( 3.50)
Pentru determinarea rezistenţei la solicitări statice a transmisiei cardanice, se efectuează probe pe maşini de încercare la torsiune, care dezvoltă un moment care creşte treptat până la ruperea celei mai slabe secţiuni a transmisiei de încercat. În timpul acestei probe se măsoară şi deformaţiile corespunzătoare diferitelor momente, determinându-se şi caracteristica de rigiditate la răsucire a transmisiei cardanice încercate.
Dacă se doreşte reproducerea sarcinilor dinamice care solicită transmisia
longitudinală se poate intercala un excitator ca cel utilizat la standul de încercare al ambreiajului, momentul de solicitare constant furnizat de motorul electric devine variabil. Standurile de încercare a transmisiei longitudinale cu flux deschis prezintă dezavantajul
Fig.3.26. Schema standului de încercare pentru determinarea pierderilor din transmisia cardanică în
flux de energie deschis.
Fig. 3.27. Schema standului cu flux de energie închis pentru încercarea transmisiei cardanice.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
120
consumului ridicat de energie folosirea lor fiind evitată mai ales la încercările de lungă durată.
Pentru încercarea transmisiilor cardanice, cele mai răspândite sunt standurile de încercare cu flux de energie închis. În figura 3.27 este prezentată schema unui astfel de stand. Acesta se compune dintr-o parte de antrenare, formată din motorul electric de antrenare cu stator oscilant 1, ambreiajul 2, care joacă şi rolul de cuplaj de siguranţă, şi din circuitul închis, format din reductoarele 5 şi 7 şi din transmisia cardanică de încercat 6 şi cea de serviciu 8.
Încărcarea circuitului închis se realizează prin rotirea flanşei arborelui de intrare 4 în raport cu flanşa 3, care este solidară cu arborele de ieşire 9 şi care este astfel torsionat. Reductoarele 5 şi 7 au raport de transmitere egal cu unitatea, reductorul 7 fiind deplasabil pentru a permite încercarea transmisiilor cardanice de diferite lungimi şi cu diferite unghiuri de înclinare α.
După încărcarea circuitului cu momentul de torsiune Mt (prin răsucirea arborelui 9), se determină puterea Pα pentru antrenarea montajului corespunzător unghiului de înclinare α , figura 3.27,a şi P0 corespunzător unghiului α=0, figura 3.27,b, când pierderile din transmisia cardanică sunt nule. Considerând că pierderile din transmisiile longitudinale sunt egale, puterea pierdută suplimentar în transmisia cardanică la transmiterea momentului sub unghiul α, este dată de relaţia:
( )021 PPP −⋅=Δ α ( 3.51)
3.2.5 Încercarea punţilor motoare Obiectivele încercării punţilor motoare sunt: verificarea angrenării; verificarea
calităţii materialelor şi a tehnologiei de fabricaţie sau de reparaţie; determinarea caracteristicii de temperatură; determinarea nivelului de zgomot şi de vibraţii; verificarea etanşărilor; determinarea randamentului şi a pierderilor de putere; verificarea rezistenţei şi a rigidităţii componentelor, diferenţial, reductor central, arbori planetari, transmisie finală; verificarea rigidităţii carterului; determinarea durabilităţii în ansamblu şi pe componente; verificarea comportării lubrifianţilor; etc.
Toţi aceşti parametrii care caracterizează calitatea unei punţi se pot determina pe instalaţii special concepute. Schema şi echipamentele unui astfel de stand de încercare trebuie să asigure posibilitatea obţinerii regimurilor de sarcini şi viteze ale funcţionării punţilor motoare, trebuie să asigure următoarele posibilităţi: măsurarea turaţiei arborelui de intrare; măsurarea momentelor de torsiune ale arborilor de intrare şi de ieşire; reglarea vitezei unghiulare de antrenare în domeniul de lucru al punţii; reglarea răcirii pentru funcţionarea la temperatura nominală cu o abatere de ± 5oC; înregistrarea, atunci când este cazul a sarcinii, a numărului de cicluri de încercare sau a timpului de încercare.
Încercarea punţilor motoare se poate face pe standuri cu flux de energie deschis sau închis, în funcţie de scopul şi de durata încercărilor.
Schema unui stand pentru încercarea punţii motoare în flux deschis este prezentată în figura 3.28.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
121
Motorul electric cu stator oscilant 1 antrenează, prin intermediul ambreiajului 2, care joacă şi rolul de cuplaj de siguranţă , şi a cutiei de viteze 3, puntea motoare 4.
Frânarea se realizează cu ajutorul generatoarelor electrice 5 şi 6 cu stator oscilant, sau cu două frâne hidraulice de putere corespunzătoare. Cutia de viteze 3 realizează treptele de viteze la care funcţionează puntea motoare pe autovehicul, când nu se dispune de un motor de antrenare cu viteză unghiulară variabilă care să permită realizarea întregii game de viteze unghiulare. În cazul utilizării standului pentru determinarea randamentului şi a pierderilor din puntea de încercat, este necesar să se cunoască randamentul cutiei de viteze 3. Pentru determinarea pierderilor şi a randamentului punţii motoare se măsoară momentul M1 dezvoltat de motor, prin echilibrarea statorului acestuia cu greutatea G1 la braţul r1, momentele M2 şi M2’ ale generatoarelor de frânare cu greutăţile G2, respectiv G2’ la braţul r2 şi viteza unghiulară la intrare ω1 (pentru egalizarea turaţiilor celor doi arbori, diferenţialul se poate bloca) .
Momentul M1 şi puterea P1 dezvoltată de motor se determină cu relaţiile: 111111111 respectiv ωω ⋅⋅=⋅=⋅= rGMPrGM ( 3.52)
unde ω1 este viteza unghiulară a motorului de antrenare. Momentul M1’şi puterea P1’ cu care este antrenată puntea motoare încercată se
determină cu relaţiile: cvcvcvcvcvcv rGPPirGiMM ηωηηη 1111
'1111
'1 respectiv ⋅⋅=⋅=⋅⋅⋅=⋅⋅= ( 3.53)
în care icv este raportul din cutia de viteze; ηcv - randamentul cutiei de viteze. Momentele M2, M2’şi puterile P2, P2’ la arborii frânelor se determină cu relaţiile:
ocv
ocv
iirG
MPrGM
iirGMPrGM
⋅⋅⋅
=⋅=⋅=
⋅⋅⋅
=⋅=⋅=
12'
22
'2
'22
'2
'2
122222222
respectiv
respectiv
ωω
ωω
( 3.54)
unde: io este raportul de transmitere al reductorului central; ω2 este viteza unghiulară a arborilor de ieşire din puntea motoare.
Dacă diferenţialul nu este blocat datorită frecărilor puterile P2 şi P2’ nu sunt întotdeauna egale, pe o instalaţie de acest tip se poate determina şi repartiţia puterii şi a momentului de torsiune pe arborii planetari.
Fig. 3.28 Schema standului pentru încercarea punţii motoare
în flux de energie deschis.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
122
Puterea totală absorbită de frână este:
( )'22
12'22 GG
iir
PPPocv
f +⋅⋅
=+=ω ( 3.55)
iar pierderea de putere în puntea motoare este:
] ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅−⋅⋅⋅=−=+−=Δ '
222
111'
1'
22'
1 GGiir
rGPPPPPPocv
cvf ηω ( 3.56)
Randamentul punţii se calculează cu relaţia: ( )
1
'22
1
2'
1'
1
'22
'1
'1
GGG
iirr
PP
PPP
PPP
ocv
f −⋅
⋅⋅==
+=
Δ−=η ( 3.57)
Standul prezentat schematic în figura 3.28 poate fi modificat să utilizeze motor de antrenare şi generatoare de frânare cu rotoare fixe, în acest caz măsurarea momentelor de torsiune M1’, M2 şi M2’ făcându-se cu traductoarele de moment de torsiune 7, 8 şi 9.
Pentru încercarea punţilor motoare se recomandă să fie folosite standuri de energie în flux de energie închis, construite după scheme similare cu cele folosite la încercarea cutiilor de viteze şi a transmisiilor cardanice.
În schema din figura 3.29, puntea de încercare 6 este amplasată deasupra punţii de serciu 4, punţile fiind plasate în plan vertical, rezultând un stand foarte compact. Arborii cardanici 3 şi 8 şi reductoarele 5,7 şi 10, cu raport de transmitere unitar şi număr impar de roţi închid circuitul standului. Celula de încărcare 9, montată pe arborele 8 asigură încărcarea punţii de măsurare. Pentru antrenarea standului se foloseşte motorul cu stator oscilant 1, iar adaptarea vitezei unghiulare de antrenare se realizează cu ajutorul reductorului 2. Arborii cardanici 3 şi 8 şi reductoarele 5,6 şi 10 se proiectează astfel încât standul să fie cât mai flexibil pentru a fi folosit la încercarea mai multor tipuri de punţi motoare.
O altă variantă de stand de încercare punţi este prezentată schematic în figura 3.30. Puntea de
încercat 4 şi cea de serviciu 8 sunt legate în serie prin intermediul arborelui cardenic 6 şi prin reductoarele 5, 7 şi 11, iar încărcarea se realizează prin dispozitivul 9 cu ajutorul căruia este torsionat arborele 10. Antrenarea standului se face cu ajutorul motorului cu
Fig. 3.29 Schema standului pentru încercarea punţii motoare în flux de energie inchis, cu plasate în plan
vertical.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
123
stator oscilant 1, a reductorului 2 şi a arborelui cardanic 3. Acest stand prezintă dezavantajul că ocupă o suprafaţă mare.
În figura 3.31 este prezentată schema unui stand de încercare punţi motoare la care punţile 4 şi 5 sunt amplasate faţă în faţă, iar închiderea circuitului se realizează prin patru reductoare conice 9, cu raport de transmitere unitar şi doi arbori cardanici 8. Încărcarea circuitului se realizează pri torsionarea arborelui 6 cu dispozitivul 7, iar antrenarea se face cu motorul cu stator oscilant 1, prin intermediul reductorului 2 şi a angrenajului 3. Utilizarea reductoarelor conice şi a unor arbori cardanici lungi constituie dezavantajul acestui stand.
În figura 3.32 sunt reprezentate schematic standurile pentru încercarea în condiţii de laborator a carterului punţii spate, a grinzii punţi din spate şi a punţii rigide faţă.
Fig. 3.30. Schema standului cu flux de energie închis pentru încercarea punţii motoare, cu punţi aşezate în
serie.
Fig. 3.31 Schema standului pentru încercarea punţii
motoare în flux de energie inchis, cu plasarea punţilor faţă în faţă.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
124
În cazul standului pentru încercarea statică a carterului punţii, figura 3.32, a, pe
jugul 2, care este conceput astfel încât să se sprijine pe platformele pentru arcuri acţionează în centru forţa F, care se transmite în mod egal prin cele două puncte de sprijin. Capetele carterului, în zona planului longitudinal de simetrie al roţii, se spriţină pe traductoarele de forţă 1 şi 3. Deformaţia carterului punţii poate fi măsurată cu ajutorul traductorului de deplasare 4. Forţa care acţionează asupra jugului 2 poate fi mărită
treptat până la ruperea carterului. Pentru studiul comportării la oboseală a carterului punţii se folosesc standuri concepute după schema din figura 2.32, b, caz în care forţa F se poate aplica prin intermediul unei pârghii lungi şi are caracter pulsator, fiind generată de un mecanism cu excentric sau de un cilindru servohidraulic comandat în forţă. În cazul standurilor moderne se folosesc doi cilindrii servohidraulici care acţionează în zona de sprijin a traductorilor 1 şi 3, iar sprijinul carterului se face pe platformele pentru montajul arcurilor.
În figura 3.33 este prezentat un stand servohidraulic pentru încercarea la oboseală a fuzetelor. Cilindrul hidraulic 3 este comandat în forţă de servovalva 1 şi distribuitorul hidraulic 2. Pe tija cilindrului este montat traductorul de forţă 4 care monitorizează solicitarea la care este supusă piesa de încercare 7, în cazul de faţă fuzeta, şi oferă informaţii sistemului de comandă al
Fig. 3.32. Schema standului pentru încercarea carterului punţii: a) la rezistenţă statică; b) la oboseală.
Fig. 3.33 Schema standului servohidraulic pentru
încercarea fuzetelor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
125
standului. Legătura dintre fuzeta încercată 7 şi traductorul de forţă 4 se face prin lamela elastică 5, braţul de solicitare 6 şi bucşa de adaptare 8. Cu un astfel de stand programul de încercare pate fi astfel condus încât să simuleze cât mai fidel solicitările din exploatare.
În figura 3.34 este prezentat schematic sistemul de comandă electronic şi hidraulic
al unui stand servohidraulic ecipat cu un cilindru, ca cel din figura 3.33. Componentele hidraulice principale ale standului sunt grupul de forţă 1, format dintr-un sistem de pompe, răcitoare şi rezervoare, acumulatorul 2, filtrul 3, distribuitorul 4 şi cilindrul hidraulic 5. Semnalul de comandă este dat de generatorul de semnal programabil 6, sau de placa de achiziţie de date şi comandă montată în calculatorul care supravehează procesul, este preluat de amplificatorul de comandă şi transmis servovalvei 8, care realizează legătura dintre sistemul de comandă electronic şi distribuitorul hidraulic. Semnalul primit de la traductorul de forţă 9 este monitorizat pentru evidenţierea solicitărilor la care este supusă piesa în timpul încercărilor fiind vizualizat prin intermediul osciloscopului 10. În acaleşi timp este retransmis prin amplificatorul de feedback 11 în amplificatorul de comandă pentru a corecta comanda ce urmează să fie dată standului. Comanda unui astfel de stand se face în forţă sau în deplasare, el fiind prevăzut cu dispozitive de protecţie care să sesizeze deteriorarea piesei, spre exemplu creşterea peste o anumită limită a deplasării în cazul comenzii în
Fig. 3.34. Schema bloc a sistemului de comandă electronic şi hidraulic pentru un stand servohidraulic cu un cilindru.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
126
forţă îndică ruperea piesei, la fel şi micşorarea sub o anumită limită a forţei la comanda în deplasare. Testele efectuate pe acest tip de standuri pot fi eccelerate în limita posibilităţilor tehnice ale standurilor prin mărire frecvenţei solicitării, ştiut fiind că frecvenţa solicitorilor influenţează într-o măsură nesemnificativă rezultatele testelor la solicitarea de oboseală.
3.2.6 Încercarea transmisiei în ansamblu În cadrul încercărilor de laborator se practică şi încercarea în ansamblu a
transmisiei, pentru a obţine o viziune completă asupra comportării întregii transmisii. În cazul tractoarelor această modalitate de încercare este inpusă şi din considerente constructive, componentele transmisiei fiind montate în cartere comune.
Obiectivele încercărilor sunt similare cu cele prezentate în subcapitolele referitoare la încercarea celorlalte subansamble ale transmisiei.
Încercarea transmisiei în ansamblu se poate face prin două metode: pe standuri cu flux de energie deschis şi pe standuri cu flux de energie închis. Principial nu apar diferenţe între standurile utilizate la încercarea transmisie în ansamblu şi cele utilizate la încercarea celorlalte componente ale transmisiei.
Pentru încercarea transmisiei în ansamblu se poate folosi un stand de încercare cu flux de energie deschis construit după schema prezentată în figura 3.35. Motorul electric cu stator oscilant 1, antrenează prin intermediul cuplajului 2 transmisia de încercat 3. Momentele rezistente la ieşirea din transmisie M2 şi M2’ sunt realizate cu ajutorul frânelor cu stator oscilant 6 şi 7, care sunt legate de transmisie cu ajutorul cuplajelor 4 şi 5. În cazul în care nu dispunem de motor cu stator oscilant şi de frâne cu stator oscilant, pentru
măsurarea momentelor se pot folosi trei traductoare tensometrice amplasate după cum urmează: la intrarea în ansamblulu transmisiei; la ieşirile din transmisie înainte de frâna.
Pierderile de putere din transmisie se calculează cu relaţia: ( )
⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅+−⋅=−=Δ
trf i
rGGrGPPP 2
'22
111 ( 3.58)
iar randamentul transmisiei: ( )
1
2'22
1 rGrGG
PPf
tr ⋅⋅−
==η ( 3.59)
Pentru determinarea pierderilor de putere la mersul în gol al transmisiei sau pentru rodaj pot fi folosite standuri construite după schema din figura 3.36. Un astfel de stand se compune din motorul cu stator oscilant 1, care antrenează componentele transmisiei:
Fig. 3.35 Schema standului cu flux de energie
deschis pentru încercarea transmisiei în ansamblu.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
127
ambreiajul 2; cutia de viteze 3; transmisia longitudinală 4; puntea motoare 5; roţile motoare 6. Spre deosebire de schema din figura 3.55 lipsesc elementele de frânare.
Cunoscând turaţia şi momentul de antrenare se pot determina pierderile de putere
la mersul în gol cu relaţia: 111 ω⋅⋅=Δ rGP ( 3.60)
Conform celor prezentate în subcapitolul 3.2.1, pierderile la funcţionarea în gol diferă foarte mult de cele din timpul funcţionării sub sarcină.
O încercare similară poate fi efectuată direct pe autovehicul, prin suspendarea acestuia şi antrenarea transmisiei cu ajutorul motorului autovehiculului. Pentru stabilirea pierderilor de putere este necesară măsurarea turaţie şi momentului la intrare, metoda necesitând montarea unui traductor de moment între motor şi ambreiaj. Pierderile de putere la mersul în gol mai pot fi determinate şi prin antrenarea transmisiei de la roţile motoare cu ajutorul unor motoare cu stator oscilant, în condiţiile în care ambreiajul autovehiculului este decuplat.
O informaţie calitativă asupra pierderilor de putere din transmisie se poate obţine prin consumul specific de combustibil la antrenarea transmisiei în gol cu o anumită turaţie.
În baza acestor măsurători pot fi determinate cu aproximaţie pierderile de putere din transmisise la mersul în gol, pentru determinarea randamentului transmisiei fiind necesare încercări mai complexe efectuate pe stadduri similare cu cele prezentate în figura 3.35 şi3.37.
Schema de principia a unui stand de încercare a transmisiilor cu flux de energie închis depinde în principal de tipul transmisiei care se încearcă. La alegerea schemeii trebiue să se aibă în vedere ca standul să prezinte un ridicat grad de universalitate şi să permită automatizarea regimurilor de încărcare şi a operaţiunilor de comandă avute în vedere prin programul de încercare.
Schema generală a unui stand de încercarea a transmisiilor în flux de energie închis depinde de tipul transmisiei care se încearcă. La alegerea ei trebuie să se aibă în vedere ca standul să prezinte un ridicat grad de universalitateşi să permită automatizarea regimurilor de încărcare şi a operaţiunilor de comandă avute în vedere prin programul de încercare.
Fig. 3.36. Schema standului pentru determinarea pierderilor de putere din transmisie.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
128
Fig. 3.37. Schema standului cu flux de enegie închis pentru încercarea transmisie în ansamblu.
Fig. 3.38. Schema standului cu flux de enegie închis pentru încercarea transmisie unui automobile
sau tractor pe roţi.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
129
În cazul standului pentru încercarea transmisiei autovehiculelor în flux de energie închis, figura 3.37, transmisia de încercat 9 şi cea de serviciu, împreună cu reductorul 11, angrenajele 6 şi 8 şi cu arborele cardanic 7 formează circuitul închis al standului de încercare. Dispozitivul de încărcare 4 asigură torsionarea circuitului, iar antrenarea standului se face de către motorul cu stator oscilant 1, prin intermediul reductorului 2 şi a ambreiajului 3. Suplimentar, pentru monitorizarea momentului de antrenare al transmisiei se poate folosi şi un traductor de cuplu 10 cu întreg lanţul de măsură aferent. Acest stand este construit după acelaşi principiu cu standul de încercare a punţilor motoare din figura 3.30.
În schema din figura 3.38 este prrezentat un stand de încercare transmisii tractoare pe roţi şi automobile. Standul se compune din cele două transmisii de încercat, 18 şi de serviciu 17, din dispozitivul de încărcare 4, din elementele de închidere şi cele de antrenare. Arborii roţilor motoare sunt cuplaţi între ei prin perechile de reductoare cilindrice 7 şi 8, respectiv 9 şi 10 şi prin arborii de legătură 12 şi 13. Reductoarele 8 şi 9 sunt unite prin cuplajul 14, iar transmisiile 17 şi 18 se leagă de reductoarele conice 3 şi 5 (care au raport de transmitere unitar) prin intermediul arborilor cardanici 6. Standul este antrenat de motorul electric 1 prin intermediul ambreiajului 2. Pentru măsurarea momentului de torsiune la intrarea în puntea de încercare 18 se foloseşte traductorul 11, iar penru măsurarea momentelor de la ieşire se folosesc cele două traductoare de moment 16.
Schema din figura 3.38 poate fi adaptată uşor prin echiparea cu două diferenţiale pentru încercarea transmisiilor tractoarelor pe şenile.
3.2.7 Posibilităţi de automatizare a regimurilor de încărcare Alegerea regimului de lucru al standurilor pentru încercarea componentelor
transmisiei presupune în principal reglarea solicitării (momentului de torsiune rezistent) şi a vitezei unghiulare. Modificarea solicitării după prescripţiile programului de încercare se face cel mai uşor cu ajutorul dispozitivelor de încărcare cu comandă hidraulică.
Schema unei instalaţii hidraulice care permite menţinerea constantă a presiunii de
ulei în dispozitivul de încărcare sau să o modifice în trepte după un anumit program este prezentată ân figura 3.39. Pompa 1 refulează ulei în circuitul hidraulic, acesta ajungând în rezervorul de ulei 7, fie prin supapa de presiune maximă 3, fie prin unul dintre droselele 2. Supapele electromagnetice comandă trecerea uleiului hidraulic printr-
Fig. 3.39. Schema instalaţiei hidraulice de încărcare în trepte.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
130
un anumit drosel. În conducta 5 se obţine o anumită valoare constantă a presiunii comandate, care se transmite şi cilindrului dispozitivului de încărcare 6. Instalaţia din figura 3.39 permite realizarea a cinci trepte de încărcare, care pot fi programate prin intermediul supapelor electromagnetice într-o anumită succesiune în conformitate cu programul de încercare.
În figura 3.40 este reprezentată schema de principiu a unei instalaţii hidraulice de comandă şi acţionare a dispozitivului de încărcare. Aceasta este formată din cilindrul hidraulic 5, care este comandat de dispozitivul de comandă 4, prin intermediul instalaţiei hidraulice de comandă 5. Energia necesară acţionării cilindrului 5 este produsă de grupul de forţă 2, format din motorul electric M şi pompa hidrostatică P, care refulează uleiul hidraulic din rezervorul 7.
Folosirea cilindrilor hidraulici servocomandaţi pentru realizarea sarcinilor variabile a căpătat o largă răspândire în ultima perioadă, datorită faptului că se poate modifica rapid şi foarte precis încărcarea standului.
Schema unei înstalaţii servohidraulice de comandă şi acţionare a dispozitivului de încărcare cu circuit închis de reglare este reprezentată în figura 3.41. Presiunea necesară acţionării cilindrului hidraulic 3 al celulei de încărcare este generată de grupul de forţă format din motorul electric 2 care acţionează pompa hidrostatică cu debit variabil 1. Instalaţia are un sistem de urmărire automată a programului de încercare, reprezentat prin circuitul închis de reglare automată a cărui structură este prezentată în figura 3.41. Mărimea de comandă Xi dată de blocul de programare 4, este comparată cu mărmea de ieşire Xe măsurată de traductorul de moment 8 şi amplificată de amplificatorul 7, în blocul de comparare şi reglare 5. Acesta furnizează semnalul Xm care comandă sistemul de execuţie 6 format dintr-o servovalvă şi un distribuitor hidraulic. În
Fig. 3.40 Schema de principiu a instalaţiei de comandă şi acţionare a dispozitivului de încărcare.
Fig. 3.41 Schema instalaţiei servohidraulice de
comandă şi acţionare a dispozitivului de încărcare cu circuit închis de reglare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
131
felul acesta prin corecţii succesive încărcarea rezultată Xe este adusă la o valoare foarte apropiată de valoarea comandată Xi.
În afară de reglarea automată a sarcinii este necesară şi reglarea automată a turaţiei. Pentru aceasta blocul de programare va comanda şi turaţia de antrenare a standului în concordanţă cu încărcarea.
3.3 Încercarea şi omologarea suspensiei
3.3.1 Generalităţi, metode de încercare Încercarea suspensiei se poate face prin încercări de parcurs şi prin încercări de
laborator, pe standuri de încercare specializate. Prezentul capitol tratează o parte din încercările efectuate pe standuri pentru suspensia în ansamblu, sau pentru componentele acesteia.
Încercările pe stand se fac pe autovehiculul în ansamblu, pe ansamblul suspensiei sau pe componentele acesteia: arcuri, amortizoare, stabilizatoare, articulaţii, tampoane limitatoare, etc.
Principalii parametri care caracterizează calităţile suspensiei sunt: caractreistica
elastică verticală a suspensiei şi a elementelor sale elastice, figura 3.42, a şi caracteristica elastică unghiulară, transversală a acesteia, figura 3.42, b. Pentru determinarea caracteristicii elastice verticale se stabileşte dependenţa dintre sarcina verticală F şi deformaţia elementului elastic h. Perechile de valori forţă F, deformaţie h se determină atât la încărcare cât şi la descărcare trasând caracteristica F=f(h) prezentată în figura 3.42,a. Pe curbă se marchează încărcarea nominală Fn şi starea descărcată Fo. Între caracteristica de încărcare şi cea de descărcare apar diferenţe esenţiale, pornind de la care se determină forţa de frecare Ff, săgeata statică ho şi cursa suspensiei până la tamponare.
Caracteristica elastică unghiulară transversală a suspensiei reprezintă dependenţa momentului M care provoacă înclinarea transversală a caroseriei cu unghiul αt, figura 3.42, b. Metodica de determinare a rigidităţii unghiulare, a frecărilor aferente este identică cu cea de determinare a rigidităţii verticale.
Fig. 3.42. Caracteristicile elastice ale suspensiei: a - verticală; b – unghiulară transversală.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
132
Datorită particularităţilor de montaj, a frecărilor din articulaţii şi a amortizărilor, în funcţie de tipul suspensiei, caracteristica elastică a suspensiei în ansamblu diferă considerabil de caracteristia elementului elastic. Caracteristica elastică a suspensiei se determină separat pentru suspensia faţă şi spate. Pentru determinarea caracteristicii elastice, autovehiculul, se aşează cu roţile, a căror suspensie se încearcă, pe un cântar, se încarcă treptat, măsurând concomitent forţa F şi distanţa dintre caroserie şi sol, sau dintre caroserie şi axa roţilor. În primul caz se pune în evidenţă şi influenţa pneurilor, iar în al doilea caz doar caracteristica suspensiei.
Caracteristica elementului elastic propriuzis se poate determina pe o instalaţie de încercat arcuri, procedându-se la fel ca la încercarea suspensiei în ansamblu.
Prin încercările la oscilaţii forţate pe stand se reproduc oscilaţiile specifice deplasării în diferite condiţii introducând diferite tipuri de perturbaţii, aleatoare sau periodice care caracterizează funcţionarea suspensiei la deplasarea pe o anumită categorie de drum într-un anumit regim de exploatare.
Perturbaţiile aleatoare şi cele perioade se pot simula pe instalaţii complexe prin aşezarea roţilor pe cilindrii hidraulic vibratorii de tip hidropuls. Perturbaţiile periodice pot fi simulate şi pe standuri cu rulouri sau cu bandă rulantă, pe care se montează neregularităţi de forma şi dimensiunile dorite.
Trebuie subliniat faptul că deşi probele pe stand sunt o formă evoluată şi comodă de încercare a suspensiei, ele nu pot înlocui în totalitate încercările de parcurs, deoarece autovehiculul evoluează foarte rapid şi dacă la început rolul principal al suspensiei era să asigure confortul în prezent se insistă tot mai mult pe asigurarea siguranţiei circulaţiei prin caracteristicile suspensiei, suspensia autovehiculelor moderne devenind un element de siguranţă activă.
3.3.2 Încercarea elementelor elastice ale suspensiei În prima fază se determină caracteristica elastică a arcului, punându-se în evidenţă
calităţile sale funcţionale. Pentru încercările de durabilitate ale
arcurilor variaţia amplitudinii de oscilaţie trebuie să corespundă cu condiţiile reale de lucru. Se urmăreşte stabilirea: numărului total al ciclurilor de încercare până la apariţia ruperii; numărul total de cicluri până la apariţia deformaţiilor remanente; modificarea caracteristicii elastice după un anumit număr de cicluri; etc. În afară de acestea în timpul încercărilor se urmăreşte uzura pieselor care au suprafeţe de frecare (cercei, bolţuri, articulaţii, etc.). Pentru scurtarea timpului de încercare aceasta se poate aceelera prin mărirea frecvenţei de oscilaţie, ştiut fiind faptul că influenţa acesteia asupra duratei de viaţă este nesemnificativă.
Fig. 3.43 Stand pentru încercarea arcurilor
suspensiei.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
133
Pentru încercarea arcurilor semieliptice, figura 3.42, acestea se aşează pe stand astfel încât planul foii principale să fie paralel cu masa standului. Fixarea arcului pe stand trebuie să permită mişcarea arcului la fel ca şi în stare montată pe autovehicul. În mod obişnuit arcul este articulat la capătul 6 şi rezemat la capătul 7. Standul este comandat în forţă, prin alegerea forţei medii de solicitare şi a amplitudinii, iar deplasarea este limitată la o anumită valoare maximă astfel încât standul să fie protejat şi se sesizeze momentul în care a apărut ruperea. Pe standul a cărui schemă este prezentată în figura 3.43, încărcarea se realizează cu ajutorul cilindrului hidraulic 1 comandat de valva electrohidraulică 5, care primeşte semnalul de comandă de la dispozitivul 4. Acest dispozitiv compară semnalele primite de la dispozitivul de programare 3 şi de la traductorul de forţă 2 şi monitorizează semnalul primit de la traductorul de deplasare.
La stabilirea programului de încercare la durabilitate a arcului din foi se are în vedere în mod obişnuit un ciclu de solicitare sinusoidal cu următorii parametrii ai ciclului de solicitare:
Valoarea medie a forţei Fm, care se alege de obicei egală cu sarcina statică; Valoarea amplitudinii Fa, care se alege într-o primă aproximaţie cu relaţia
Fa=(0,3....0,5)Fmax; Valoarea maximă a forţei Fmax=Fm+Fa;
Pentru arcurile semieliptice nesimetrice, valoarea Fmax se determină cu relaţia:
21
minmaxmax llJ
LWJF
p
t
⋅⋅⋅⋅⋅
=σ ( 3.61)
unde: σmax este valoarea maximă a efortului unitar pe foaia principală, 750 Mpa; Jt - momentul de inerţie total al foilor arcului semieliptic; Jp - momentul de inerţie al foii pricipale; L - lungimea totală; l1 -lungimea din dreapta secţiunii; l2 -lungimea din stânga secţiunii.
Valoarea amplitudinii Fa se poate calcula cu relaţia:
21
min
llJLWJ
Fp
taa ⋅⋅
⋅⋅⋅=σ ( 3.62)
în care: σa este valoarea amplitudinii efortului unitar, 250 Mpa. Cursa care rezultă pentru cilindrul de acţionare a standului se determină cu relaţia:
a
a
CF
S⋅
=2 ( 3.63)
unde: Ca este rigiditatea arcului semieliptic. Pentru a prezenta o durabilitate acceptabilă în baza programului de încercare
prezentat mai sus, arcul din foi trebuie să suporte până la rupere (2...3)*105 cicluri de solicitare.
Regimul de solicitare la care se face încercarea trebuie să producă detreiorarea arcului, încadrându-se în zona cu pantă descrescătoare, I, a curbei Wohler. Prin analiza ruperii se poate stabili şi cauza ruperii: solicitarea la oboseală – care este cauza naturală; concentrator de tensiune care a grăbit îniţierea şi propagarea fisurii – cauză accidentală care trebuie eliminată; suprasolicitare - cauză accidentală care trebuie eliminată; etc.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
134
Încercările se esfectuează pe mai multe produse, rezultatele finale fiind interpretarea statistică a rezultatelor parţiale. În cazul în care se doreşte compararea a două caracteristici de oboseală pentru două tipuri de arcuri, se stabilesc cel puţin două regimuri de încercare pentru fiecare dintre acestea, aflate pe zona I a curbei Wohler, zona în care se produc ruperi. Se efectuează încercări pentru mai multe arcuri din fiecare tip şi rezultă în urma încercărilor cele două curbe tensiune – număr de cicluri trasate experimental. Prin compararea celor două caracteristici de rezistenţă la oboseală se pune în evidenţă comportarea celor două produse la diferite regimuri în timpul exploatării.
Construcţia standurilor pentru arcuri elicoidale este similară, cu precizarea că pentru mărirea productivităţii pot fi încercate mai multe arcuri simultan.
3.3.3 Încercarea amortizoarelor Încercarea amortizoarelor în condiţii de laborator presupune efectuarea
următoarelor tipuri de probe: probe funcţionale, pentru detrminarea caracteristicii de funcţionare (de lucru) şi a caracteristicii funcţionale a amortizoarelor; probe de a anduranţă pentru determinarea rezistenţei în exploatare a amortizorului în ansamblu şi a diferitelor componente ale amortizorului cum sunt garniturile de etanşare, supape, tije, gidaje, etc.
În figura 3.44 este prezentată schema de principiu a unui stand de încercare
amortizoare pe care poate fi ridicată atât caracteristica de funcţionare sau de lucru Fa=f(s) pentru o viteză constantă de deplasare a pistonului, adică variaţia forţei de amortizare funcţie de cursa amortizorului, cât şi caracteristica funcţională sau externă a amortizorului Fa=f(v), adică variaţia forţei de amortizare funcţie de viteza de deplasare a pistonului. În componenţa standului intră următoarele elemente principale: A grupul
Fig. 3.44. Schema standului pentru încercare amortizoare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
135
convertizor; B standul propriuzis; C lanţul de măsurare, achziţie şi vizualizare a datelor; D pupitrul de comandă.
Grupul convertizor A, este compus din motorul de curent alternativ trifazic 1, care antrenează generatorul de curent continuu 2, care alimentează motorul de curent continuu 3 al standului propriuzis.
Standul propriuzis B, este format din motorul de curent continuu 3 cu turaţie variabilă de la 0 la 3000 rot/min, cuplajul electromagnetic 4 care face legătura cu volantul 6 prin intermediul reductorului planetar 5. Raza r de amplasare a manetonului volantului 6 este reglabilă în domeniul 0....75mm, obţinându-se o cursă variabilă a bielei 7 prin care este antrenată culisa 8. Amortizorul de încercat 9 este articulat cu unul din capete pe culisa 8, celălalt capăt fiind articulat într-un punct fix la carcasa standului de încercare.
Lanţul de măsură, achiziţie, stocare şi vizualizare a datelor C, este format din traductorul de cursă 10 legat în paralel cu amortizorul, din traductorul de forţă 11 legat în serie cu amortizorul, din amplificatoarele de măsură 13, sursa de alimentare 12 şi componentele de achiziţie, stocare şi vizualizare a datelor 14.
Pupitrul de comandă D, este format din întrerupătoarele 15, 16 şi 17, care comandă generatorul 1, motorul de antrenare a standului 3 şi cuplajul electromagnetic 4. În plus mai este prevăzut cu un potenţiometru pentru reglarea turaţiei motorului de antrenare.
Cu datele primite de la traductorul de cursă şi cel de forţă se pot trasa caracteristica de funcţionare şi caracteristica externă a amortizorului. În figura 3.45 este prezentată o caracteristică externă pentru un amortizor bitubular. Punctele caracteristice ale acestei diagrame sunt cele la care viteza de deplasare a pistonului este egală cu viteza critică vcr, moment în care se face trecerea de la regimul I de funcţionare în care uleiul circulă numai prin tubul interior la regimul II în care uleiul circulă şi prin tubul exterior şi se micşorează panta forţelor de amortizare atât pe cursa de destindere cât şi pe cea de comprimare. Din diagramă se observă că la aceiaşi viteză de deplasare a pistonului valoarea forţelor de amortizare pe destindere este mai mare decât pe comprimare.
Încercarea amortizoarelor se poate face foarte eficient pe standuri servohidraulice adecvate. Spre exemplu firma Citroen recomandă pentru testele de anduranţă ale amortizoarelor un ciclu armonic de solicitare obţinut prin suprapunerea unei deplasări cu amplitudine de 10 mm după o lege de formă sinusoidală cu frecvenţa de 10 Hz (care simulează denivelările drumului) peste o oscilaţie sinusoidală cu amplitudine de 100 mm şi frecvenţă de 1 Hz (care simulează oscilaţia caroseriei). Astfel de cicluri de
Fig. 3.45 Caracteristica externă a unui amortizor
bitubular.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
136
încercare impun utilizarea standurilor servohidraulice la încercarea amortizoarelor. În timpul probelor de anduranţă trebuie monitorizată temperatura de lucru a amortizoarelor şi dacă este cazul trebuie asigurată răcirea acestora.
3.3.4 Încercarea suspensiei în ansamblu Încercarea suspensiei în ansamblu presupune utilizarea unor standuri complexe ca
cel prezentat în figura 3.46. Acesta este un stand utilizat la încercarea ansamblului suspensiei faţă independente prin solicitări după mai multe direcţii, şi anumele trei pentru fiecare roată. Pentru conectarea cilindrilor servohidraulici la punctele de aplicaţie a forţelor au fost folosite bare tubulare de legătură şi sisteme de pârghii. Prinderea ansamblului suspensiei pe stand se face la fel ca şi pe autovehicul iar aplicarea forţelor multiaxiale de solicitare se face în planul de simetrie al roţii.
În mod obişnuit cilindrii hidraulici se montează direct pe componenta testată, dar
utilizarea legăturilor lungi prezintă două avantaje esenţiale: reduce masa care oscilează reducând în felul acesta efectele inerţiei; reduce nivelul de precizie necesar comenzilor minimizând erorile ce pot apare la comanda standului.
Fig. 3.46. Stand servohidraulic pentru încercarea ansamblului suspensiei faţă prin solicitări multiaxiale.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
137
În figura 3.47, a este reprezentat schematic un stand de testare biaxială la anduranţă a suspensiei, mişcarea pe verticală fiind recomandat să se controleze în deplasare, iar cea laterală în forţă. Cilindrul hidraulic 1 transmite măşcarea la pârghia 3, iar de la aceasta la bara tubulară 7 prin intermediul căreia se transmite mişcarea principală I, pe verticală, la semiansamblul suspensiei faţă format din braţul inferior 9, elementul elastic 10 şi amortizorul 11. Forţa pe direcţie verticală se măsoară cu ajutorul traductorului de forţă 5. Pentru realizarea solicitării laterale se foloseşte cilindrul hidraulic 2, care transmite solicitarea la pârghia 4 şi de la aceasta prin bara tubulară de legătură 8 la elementele suspensiei încercate. Forţa pe direcţia laterală II este măsurată cu traductorul de forţă 6. În mod obişnuit mişcarea după direcţia II este comandată în forţă cu limitare în deplasare. Problema principală la astfel de sisteme de încercare complexe este sincronizarea comenzilor date pe diferitele axe de solicitare pentru a nu produce distrugeri accidentale ale componentelor testate sau ale standului de încercare.
În figura 3.47, b este prezentată schematic o variantă mai evoluată a unui stand de testare biaxială a suspensiei faţă în ansamblu, caz în care se foloseşte o piesă de adaptare 4 montată direct pe fuzetă. Aceasta preia atât solicitarea principală pe direcţia I primită prin intermediul barei tubulare de legătură 5, cât şi solicitarea secundară II transmisă de cilindrul hidraulic 1, prin pârghia 2 şi bara de legătură 3. Schema permite montarea traductoarelor de forţă 9 în imediata apropiere a cilindrilor hidraulici. Cu 6, 7 şi 8 au fost notate componentele semisuspensiei testate şi anume arcul, amortizorul şi braţul inferior.
Ambele scheme pot fi completate pentru simularea solicitărilor triaxiale la nivelul roţii. Utilizarea unor astfel de standuri de încercare permite folosirea unor programe de încărcare care să se apropie căt mai mult de solicitările reale din exploatare. De asemenea trebuie menţionat faptul că testarea suspensiei în ansamblu oferă o viziune completă privind comportarea acestui subansamblu, punând în evidenţă legăturile şi influenţele reciproce care există între comonente.
Fig. 3.47. Scheme de standuri servohidraulice pentru încercarea biaxială la anduranţă a suspensiei
faţă independente.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
138
În cazul în care se doreşte testarea suspensiei montate pe autovehicul se folosesc
standuri servohidraulice complexe, figura 3.48, echipate cu 12 cilindrii hidraulici, care realizează o solicitare triaxială la nivelul fiecărei roţi. În acet caz poate fi studiat şi răspunsul suspensiei la diferite prerturbaţii exterioare provenite în principal de la calea de rulare şi interioare provocate de funcţionarea diferitelor subansambluri. În felul acesta poate fi apreciat şi nivelul de confort pe care îl poate asigura autovehiculul în ansamblu. Problema principală care trebuie rezolvată la testarea pe astfel de standuri de încercare este modalitarea de fixare a autovehiculului pe stand fără a influenţa semnificativ rezultatele probelor.
Testarea suspensiei în laborator trebuie să se facă pornind de la datele obţinute la testarea suspensiei în timpul probelor de parcurs şi de la datele obţinute la determinarea profilului longitudinal al drumului, prin respectarea acestor premise
Fig. 3.48. Stand servohidraulic pentru încercarea suspensiei cu 12 cilindri.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
139
rezultatele obţinute în laborator vor confirma comportarea în exploatare a acestui subansamblu.
3.4 Încercarea şi omologarea sistemului de direcţie
3.4.1 Generalităţi, metode de încercare Alături de sistemul de frânare sistemul de direcţie este unul dintre cele mai
importante sisteme prin intermediul căruia se asigură siguranţa deplasării autovehiculelor. Pornind de la aceste premise se stabilesc obiectivele încercării sistemului de direcţie sau a componentelor acestuia. Dintre încercările principalele se pot enumera: probele funcţionale; probe de rezistenţă; probe de anduranţă şi rezistenţă la oboseală şi uzură; probe ergonomice prin care se determină uşurinţa în conducere şi randamentul direct şi indirect al sistemului de direcţie. În aceste sens se fac încercări ale elemntelor componelte în laborator şi încercări în laborator şi pe parcurs a sistemului în ansamblu.
3.4.2 Încercarea pe stand a capetelor de bară Dintre elementele componente ale sistemului de direcţie care sunt supuse unor
solicitări importante în timpul exploatării autovehiculului putem aminti capetele de bară, care se uzează atât datorită şocurilor la care sunt supuse, cât şi sub acţiunea solicitărilor uzuale. Pentru a stabili caracteristicile capetelor de bară au fost concepute şi realizate standuri pentru încercări la oboseală şi la şocuri care reproduc solicitările reale din timpul funcţionării.
În figura 3.49 este reprezentat schematic standul de încercare a capetelor de bară. Elementele principale ale standului sunt preluate de la sistemele de direcţie pentru care se încearcă capetele de bară. Grinda 1 este fixată rigid pe stand astfel încât cele două capete de bară încercate 2 să lucreze în condiţii apropiate de cele din exploatare. Cei doi cilindrii hidraulici 3 acţionează asupra sistemului de direcţie solicitând fuzeta la un ciclu alternant simetric prin intermediul capetelor de bară 4. Sistemul de încărcare este format de cilindrii hidraulici 5, care acţionează asupra fuzetei opuse prin capetele de bară 6. În acest fel pe stand pot fi încercate şase capete de bară de acelaşi tip sau de tipuri diferite.
Elementul de comandă electromagnetică 7 acţionează asupra distribuitorului hidraulic 8, care comandă circuitul hidraulic format din pompa hidrostatică 9, droselul 10 şi cilindrii 3. Frecvenţa maximă la care poate lucra circuitul hidrostatic ajunge până la 5 Hz, iar unghiul de rotire maxim al fuzetei poate ajunge la 30o-35o. Modifica presiunii în instalaţia hidrostatică se face prin droselul 10, iar încărcarea standului se modifică prin intermediul droselului 11.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
140
Standul este dotat cu următoarele traductoare, aparate de măsură, achiziţie, stocare şi vizualizare a datelor: traductoarele tensometrice de forţă 12 şi 13;
amplificatorul de măsură 14; sistemul de achiziţie stocare şi vizualizare a datelor; numărătorul de cicluri 16.
La fel ca şi în cazul celorlalte componente ale sistemului de direcţie, capetele de bară se încearcă la solicitările echivalente maxime şi la oboseală pentru a stabili veriga cea mai slabă din sistemul de direcţie. În timpul încercărilor de anduranţă ale capetelor de bară poate fi urmărită şi evoluţia jocurilor şi pot fi stabilite jocurile admisibile pentru siguranţa în exploatare.
3.4.3 Încercarea pe stand a mecanismului de direcţie Mecanismul de direcţie se încearcă pe standuri la sarcini constante sau variabile,
care simulează mai corect condiţiile de funcţionare din exploatare şi care accelerează deteriorarea prin oboseală a diferitelor elemente componente. Transmisia standului pentru încercarea mecanismului de direcţie la fiabilitate asigură o rotaţie alternativă a coloanei volanului şi a dispozitivului de încărcare care generează o forţă rezistentă.
Fig. 3.49. Schema standului de încercare a capetelor de bară.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
141
În figura 3.50 este prezentată schema unui stand pentru încercarea mecanismului de direcţie. Motorul 1 acţionează pompa hidrostatică 2 care refulează uleiul în motorul hidrostatic 3, care are mişcare oscilatorie cu amplitudine unghiulară cuprinsă între 16o şi 240o. Ansamblul de mecanisme cu roţi dinţate 4 şi 5 (cilindric, respectiv conic), amplifică această mişcare, rezultând o mişcare oscilatorie cu patru până la şase rotaţii funcţie de mecanismul de direcţie care este încercat. Frâna hidraulică 6 formată dintr-un piston prevăzut cu un orificiu reglabil, a cărui tijă 7 este legată printr-un capăt de bară de levierul de direcţie încercat 8. Manometrele 9 oferă informaţii privind forţa rezistentă. Pe o astfel de instalaţie se fac încercări de lungă durată. În timpul încercărilor după anumite perioade de timp casetele de direcţie se demontează pentru a măsura uzura.
Prin măsurarea momentului cu care este antrenat arborele volanului Mv şi a momentului la arborele levierului de direcţie Ml se pot determina randamentul direct ηd şi cel invers ηi al mecanismului de direcţie.
Randamentul direct al mecanismului de direcţie se determină cu relaţia:
l
vd M
iM ωη⋅
= ( 3.64)
iar randamentul invers:
ω
ηiM
M
v
li ⋅= ( 3.65)
unde: iw este raportul de transmitere unghiular al mecanismului. În cazul încercărilor la uzură ale mecanismului de diercţie, frecvenţa rotirii volanului
trebuie să fie egală cu frecvenţa maximă care apare în exploatare (≈ 1 rot/s), iar forţa aplicată la volan se alege 30% - 40% din forţa necesară bracării roţilor de direcţie pe loc. În timpul încercărilor se roteşte arborele volanului la unghiurile maxime.
La încercarea mecanismului de direcţie la oboseală se aplică o sarcină variabilă la articulaţia levierului de direcţie, cu ajutorul unor instalaţii de antrenare electrice sau hidrostatice.
Pe standuri combinate se pot încerca mecanismele de direcţie la uzare şi oboseală, fiind posibilă şi încercarea mecanismelor de direcţie cu servomecanism.
3.4.4 Încercarea pe stand a sistemului de direcţie Cele mai complete şi complexe teste de laborator ale sistemului de direcţie în
ansamblu se efectuează pe standuri servohidraulice de încercare a punţi faţă directoare, figura 3.51. Acestea sunt capabile să simuleze cele mai complexe situaţii de exploatare, practic pista de încercare este adusă în laborator. La testarea sistemului de
Fig. 3.50 Schema standului pentru încercarea mecanismului de direcţie.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
142
direcţia se ţine seama de forţele de frânare, de forţele de accelerare şi de reacţiunile normale şi laterale la roţile punţii faţă.
Fig. 3.52. Schema standului servohidraulic pentru încercarea punţii faţă directoare.
Fig. 3.51. Stand servohidraulic pentru încercarea punţii faţă directoare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
143
În figura 3.52 este prezentată schema standului servohidraulic pentru încercarea punţii faţă directoare în ansamblu. Acesta se compune din patru coloane de gihare 1, grinda mobilă 2, cilindrii de poziţionare a grinzii mobile şi elementele de glisare 4. Pentru prinderea punţii faţă pe stand se foloseşte piesa de adaptare 6. Motorul hidrostatic 7 acţionează asupra coloanei volanului. Încărcarea punţii se realizează cu ajutorul cilindrilor 8, care transmit forţele prin intermediul pârghiilor 5. Rularea roţilor este simulată cu ajutorul rolelor 9, iar frânarea este asigurată de cilindrul hidrostatic de frânare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
144
4 DETERMINAREA PARAMETRILOR CONSTRUCTIVI ŞI DE MASĂ AI AUTOVEHICULELOR Parametrii constructivi şi de masă sunt elementele de bază ce definesc un
autovehicul, influenţând direct unele calităţi de exploatare şi determinând forţele şi momentele care acţionează asupra sistemului de rulare, transmisie şi caroserie în timpul deplasării. Aceşti parametri servesc pentru aprecierea obiectivă a calităţilor diferitelor tipuri de autovehicule şi pentru a scoate în evidenţă dacă aceştia corespund condiţiilor de lucru impuse în exploatare. Cunoscând aceşti parametri pot fi alese autovehiculele corespunzătoare condiţiilor de exploatare date.
4.1 Determinarea parametrilor constructivi Parametrii constructivi ai autovehiculelor sunt daţi în primul rând de caracteristicile
dimensionale exterioare şi interioare ale acestora. Cunoaşterea parametrilor constructivi (dimensionali) ai autovehiculelor permite formularea unor aprecieri referitoare la adoptarea arhitecturii generale a acestuia la cerinţele domeniului de utilizare, înscrierea în normele de gabarit, calitatea execuţiei, etc. Determinarea dimensiunilor se efectuează în special la autovehiculele noi pentru a verifica modul de respectare şi încadrare în prevederile documentaţiei de execuţie sau în unele situaţii deosebite cum ar fi: la încercări de lot sau de control, la încercările unor autovehicule ieşite din reparaţia capitală, la autovehiculele recarosate în decursul exploatării lor, etc. În general se determină numai acele dimensiuni cu importanţă evidentă în exploatare, influenţând capacitatea de transport a diferitelor mărfuri, capacitatea de trecere, maniabilitatea, stabilitatea sau asigurând condiţii de ergonomie pentru conducătorul auto şi pasageri.
Pentru efectuarea măsurării dimensiunilor, autovehiculul va fi aşezat pe un platou orizontal cu îmbrăcăminte din beton sau asfalt, cu suprafaţă netedă, având o abatere de maxim ±2%. Roţile trebuie să fie în poziţia corespunzătoare deplasării în linie dreaptă. Starea de încărcare a autovehiculului se va stabili în conformitate cu starea tehnică a acestuia. Stările de încărcare în vederea măsurării dimensiunilor sunt:
fără sarcină utilă (masa proprie în stare de exploatare); cu sarcină utilă maximă.
În timpul măsurătorilor, autovehiculul trebuie să fie realizat şi echipat, conform documentaţiei de execuţie a constructorului, pneurile să nu prezinte uzură a profilului şi să fie umflat la presiunea indicată de constructor, corespunzătoare stării de încărcare.
Încărcătura este simulată prin testare cu saci de nisip, alice din metal, blocuri de beton, balast, etc. Masa corespunzătoare personalului de bord va fi de 75 Kg şi se va repartiza 61 Kg pe perna scaunului sprijinit de spătar şi 14 Kg pe locul rezervat picioarelor. La autovehiculele destinate transportului de persoane, masa persoanelor va fi de 68 Kg de persoană şi se va repartiza: 54 Kg pe perna scaunului, rezemat de spătar şi 14 Kg pe locul rezervat picioarelor. Masa echivalentă a bagajelor pentru un pasager va fi de 20 Kg la autoturisme şi autobuze interurbane, 7 la autobuzele urbane şi 25 la autocare. Masa corespunzătoare bagajelor se va aşeza în portbagaje.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
145
Cele mai utilizate dispozitive şi aparate pentru măsurători dimensionale ale autovehiculelor sunt: rulete de 2 m, 10m, 25m; şublere de 50 mm, 250 mm, 1000 mm, 2000 mm; linii gradate de 2000 şi 5000 mm, aparate pentru măsurarea unghiurilor şi firul cu plumb.
4.1.1 Determinarea dimensiunilor exterioare ale autovehiculelor Aceste dimensiuni care caracterizează construcţia unui autovehicul (automobil sau
tractor) sunt cele prezentate în figura 4.1 pentru autocamioane, figura 4.2 pentru tractorele pe roţi şi figura 4.3 pentru tractorele pe şenile.
Dimensiunile de gabarit – sunt cele mai mari dimensiuni privind lungimea A,
lăţimea E şi înălţimea D, ţinând seama şi de dimensiunile cabinei sau caroseriei. Se măsoară ca fiind distanţele dintre planele formând un paralelipiped care încadrează perfect autovehiculul, toate elementele laterale fixate rigid (barele de protecţie, butucii roţilor, aripile, mânerele uşilor etc.) fiind cuprinse între aceste plane.
Ampatamentul L (baza sau distanţa între punţi la automobile şi distanţa între axa steluţei motoare şi axa roţii de întindere) se determină prin măsurarea distanţei dintre centrele roţilor, la automobile şi prin măsurarea distanţei dintre axa steluţei
Fig. 4.1. Dimensiunile exterioare ale autocamioanelor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
146
motoare şi cea a roţii de întindere la tractoarele pe şenile. La automobilele cu mai multe punţi se măsoară succesiv distanţele dintre centrele roţilor la câte două punţi alăturate.
Ecartamentul (faţă B1 şi spate B2 şi B la tractoarele pe şenile), reprezintă distanţa
dintre axele mediane ale roţilor de pe aceeaşi punte. Pentru efectuarea acestei măsurători se recomandă trasarea cu vopsea a cercului median pe coama de rulare a anvelopei, în vederea imprimării pe platoul de măsurare a urmelor planului median al roţilor de pe aceeaşi punte. Distanţa dintre aceste puncte reprezintă ecartamentul automobilului.
Fig. 4.2. Dimensiunile exterioare ale tractoarelor pe roţi.
Fig. 4.3. Dimensiunile exterioare ale tractoarelor pe şenile.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
147
Lumina C (garda la sol) reprezintă distanţa dintre sol şi punctul cel mai de jos al autovehiculului, şi se determină ca fiind înălţimea maximă a unui paralelipiped amplasat transversal între roţile autovehiculului, peste care acesta poate să se deplaseze fără să atingă vreun element component.
Consolele faţă F şi spate G sunt distanţele pe orizontală dintre axa de geometrie a punţii din faţă respectiv a punţii din spate până la extremităţile din faţă şi din spate ale autovehiculului şi se determină măsurând distanţele de la axele punţilor din faţă şi din spate până la planul vertical transversal anterior şi respectiv până la planul vertical transversal posterior care încadrează autovehiculul.
Raza longitudinală ρ1 şi transversală ρ2 se determină ca rază a unui cilindru tangent la roţile din faţă, din spate şi punctul de lumină minimă al şasiului dintre punţi şi respectiv, raza unui cilindru tangent la roţile de pe aceeaşi punte şi la punctul cel mai de jos situat între roţi.
Unghiurile de trecere din faţă α1 şi spate α2 sunt unghiurile determinate de sol şi tangentele duse la roţi prin punctele extreme din faţă (α1) şi spate (α2) şi se măsoară ca fiind unghiurile diedre maxime cuprinse între planul orizontal al platoului pe care se sprijină autovehiculul şi un plan tangent la conturul părţii inferioare a caroseriei, astfel încât nici un punct al acestuia sau al accesoriilor fixate rigid să nu se situeze sub plan.
Dimensiunile platformei – l × k × M reprezintă lungimea (l), lăţimea (k) şi înălţimea (M), dimensiuni care se măsoară în interiorul acesteia.
4.1.2 Determinarea dimensiunilor interioare ale caroseriei autovehiculului
Corelarea judicioasă a dimensiunilor interioare ale autovehiculului urmăreşte crearea condiţiilor ergonomice favorabile pentru conducătorul auto şi personalul de bord şi realizarea confortului pentru pasageri. Comoditatea conducerii şi confortul călătorilor trebuie realizată asigurând totodată rezistenţa caroseriei, estetica şi aerodinamicitatea formei şi la un cost acceptabil.
Definirea dimensiunilor caracteristice postului de conducere se face în raport cu două plane, şi anume: planul de referinţă şi planul de proiecţie prezentate în figura 4.4. Planul de referinţă P este un plan perpendicular pe planul longitudinal median al autovehiculului, care trece prin centrul suprafeţei de apăsare a pedalei de acceleraţie şi este înclinat faţă de planul orizontal astfel încât proiecţia punctului R pe acest plan să se situeze la 200 mm faţă de suprafaţa pedalei.
Planul de proiecţie este paralel cu planul de referinţă şi trece prin centrul suprafeţei de apăsare a pedalei de frână sau ambreiaj. Se impune ca scaunul conducătorului auto să fie separat de scaunele pasagerilor din faţă, iar reglarea acestuia să asigure poziţia optimă a corpului omenesc pentru trei grupe dimensionale reprezentative.
Dimensiunile cabinei, ale locului de muncă al conducătorului auto şi amplasarea locului de comandă sunt prezentate în figurile 4.5 şi 4.6
Determinarea practică a dimensiunilor prezentate în figurile 4.5 şi 4.6 se fac cu ajutorul unui manechin (v. Capitolul referitor la siguranţa pasivă a autovehiculului). Toate rezultatele măsurătorilor se compară cu cele recomandate de normele în vigoare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
148
Fig. 4.4. Elementele postului de conducere.
Fig. 4.5 Dimensiunile interioare ale postului de conducere.
Fig. 4.6 Dimensiunile locului de muncă al conducătorului auto.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
149
4.2 Determinarea caracteristicilor de masă ale autovehiculului Masa totală a autovehiculului, repartiţia ei între roţi şi poziţia centrului de masă au
un rol important în asigurarea stabilităţii, capacităţii de trecere, a confortului şi economicităţii autovehiculului. Având în vedere dificultăţile de determinare analitice a caracteristicilor de masă la proiectarea autovehiculului, acestea trebuie determinate experimental odată cu realizarea prototipului, în cadrul încercărilor de control, cât şi odată cu efectuarea unor modificări de organizare şi amenajare a autovehiculelor.
4.2.1 Determinarea masei şi repartiţia acesteia Frecvent, pentru determinarea masei autovehiculului, se utilizează cântarul-
basculă, prevăzut cu platformă şi rampă de acces. Suprafaţa platformei cântarului trebuie să fie orizontală, iar mărimea ei trebuie să permită aşezarea autovehiculului cu cel puţin două punţi învecinate simultan. Platforma cântarului trebuie să aibă acces la ambele capete , iar în jurul acesteia să existe platouri din beton, orizontale şi la acelaşi nivel cu suprafaţă platformei. Mărimea platourilor de la capetele platformei trebuie să fie cel puţin egală cu jumătatea ampatamentului autovehiculului de cântărit pentru a putea cântări masa fiecărei punţi, iar cea laterală cel puţin jumătatea ecartamentului, asigurând cântărirea masei ce revine roţilor de pe una din părţile autovehiculului. Gradaţiile de pe cursorul cântarului trebuie să fie distincte până la 1 Kg, iar precizia de măsurare să se încadreze în limitele ± 5%.
Un alt mijloc folosit la determinarea repartiţiei masei constă dintr-un sistem de cântare individuale denumite ladametre care se amplasează sub fiecare dintre roţile autovehiculului simultan. Aceste cântare pot fi de tip mecanic sau electronic şi, de obicei sunt mobile, putând fi adaptate la diferite ecartamente şi ampatamente sau formule de roţi.
Pentru măsurarea masei agregatelor sau ansamblurilor distincte ale autovehiculului se folosesc balanţe obişnuite, cântare decimale sau dispozitive de cântărire cu ceas comparator.
Pe lângă aparatura folosită la măsurarea masei propriu-zise, la măsurătorile de masă şi de repartiţie a masei se mai utilizează mijloace pentru determinarea
Fig. 4.7. Repartizarea greutăţii autovehiculului pe punţi.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
150
dimensiunilor liniare, (rulete, liniare gradate, etc), mijloace pentru determinarea dimensiunilor unghiulare (raportoare obişnuite şi optice sau nivelă cu cadran şi microscop), mijloace de indicare pentru înclinarea autovehiculului şi mijloace de indicare a nivelului axelor de coordonate.
Repartiţia masei autovehiculului Ga în cazul automobilelor şi Gc greutatea de
exploatare în cazul tractoarelor, G1 pe puntea din faţă şi G2 pe puntea din spate pentru un autovehicul cu două punţi este prezentată în figura 4.7. Determinarea maselor pe punţile autovehiculului atunci când se cunosc greutatea totală a autovehiculului (Ga sau Gc), ampatamentul şi poziţia în plan orizontal a centrului de masă se poate face analitic sau experimental atunci când nu se cunosc parametrii enumeraţi.
Conform figurii 4.2 se poate scrie:
( ) ( ) ( )LaGG
LbGGGGGG cacaca ⋅=⋅=+= 2121 G ,G , ( 4.1)
Determinarea repartiţiei maselor pe punţi în mod analitic este diferită deoarece nu
în toate cazurile se dispune de datele necesare (masă, ampatament, poziţia centrului de masă în plan orizontal), frecvent pentru determinarea acestor mărimi se foloseşte metoda experimentală. În acest caz, automobilul de încercat pregătit pentru a îndeplini condiţia de încercat, se aşază pe platforma cântarului, consecutiv, în situaţiile următoare:
cu toate roţile, atunci când se determină masa totală (Ga respectiv Gc); numai cu roţile punţii din faţă, pentru determinarea masei ce revine acestei punţi
(G1); numai cu roţile punţii din spate, pentru determinarea masei ce revine acestei punţi
(G2); cu toate roţile din partea dreaptă pentru determinarea masei ce revine acestei părţi
(G1d + G2d) • cu toate roţile din partea stângă pentru determinarea masei ce revine acestei
părţi (G1s + G2s) şi se determină prin cântărire masele corespunzătoare.
În cazul utilizării unor cântare individuale pentru fiecare roată (sistem de ladametre),
toate datele necesare se obţin printr-o singură cântărire. Pentru a elimina unele erori de cântărire, rezultatul final va fi stabilit din media
aritmetică a câte două măsurări, efectuate prin aducerea autovehiculului pe platforma cântarului din ambele sensuri. Diferenţa dintre cele două măsurări precum şi dintre suma maselor pe punţi şi masa totală a autovehiculului trebuie să se încadreze în limitele preciziei de măsurare ± 5%.
4.2.2 Determinarea poziţiei centrului de masă De obicei, coordonatele centrului de masă se determină pentru masa totală maximă
a autovehiculului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
151
Coordonatele centrului de masă al autovehiculului orizontale (a şi b) şi înălţimea (hg) se determină experimental conform schemei din figura 4.8.
La determinarea coordonatelor orizontale ale centrului de masă (mărimile a şi b)se procedează conform paragrafului, 4.2.1 prin cântărire succesivă a autovehiculului încărcat (Ga respectiv Gc), apoi puntea din faţă (G1) şi puntea din spate (G2), după care cunoscând aceste mărimi prin calcul se obţine:
( )
.)(
;
;
1
2
1
2
LGGGb
LGGG
a
ba
GG
ca
ca
=
=
=
( 4.2)
La autovehiculele cu trei punţi, cu puntea dublă în spate, ampatamentul L şi coordonata b se consideră ca fiind de la puntea din
faţă respectiv de la centrul de masă până la planul vertical transversal ce trece prin jumătatea distanţei dintre cele două punţi din spate.
Determinarea înălţimii centrului de masă (hg) în general se face pe cale experimentală utilizând valorile obţinute la cântărirea autovehiculului aşezat succesiv în poziţie orizontală (Ga respectiv Gc), şi înclinat fie cu puntea din faţă pe cântar (G1) fie cu puntea din spate conform figurii 4.8.
Determinarea înălţimii centrului de masă se face, de obicei, pentru masa totală a autovehiculului. La autovehiculele destinate transportului de persoane, se determină pentru sarcina maximă, adică încărcată cu oameni, manechini sau prin alte metode de simulare care să asigure o repartizare a sarcinii în mod corespunzător (vezi paragraful 4.1).
Atunci când a fost determinată masa totală a autovehiculului (Ga respectiv Gc), pentru determinarea experimentală a înălţimii centrului de masă (hg) se procedează conform figurii 4.8. în felul următor:
autovehiculul se aduce cu roţile de la o punte pe platforma cântarului (puntea din spate în cazul de faţă) şi se determină masa G2 ce revine acestei punţi în poziţie orizontală;
autovehiculul se ridică cu cealaltă punte (puntea din faţă) la o înălţime oarecare şi se măsoară masa '
2G ce revine punţii considerate cu autovehiculul în poziţie înclinată.
Fig. 4.8. Determinarea experimentală a coordonatelor
centrului de masă.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
152
Cunoscând aceste mărimi (Ga respectiv Gc; G2 şi '2G ) şi coordonatele longitudinale
ale centrului de masă se poate scrie : ( ) ( )baGaGG ca +⋅=⋅ 2 ( 4.3)
de unde:
aLG
aba
GGG ca 22)(
)( =+
= ( 4.4)
Dacă se scrie ecuaţia de momente în raport cu axa roţilor din faţă (punctul 0) se obţine:
0)sin)(cos(cos)('2 =−+−+ ααα rhgaGbaG a ( 4.5)
Din această relaţie prin înlocuirea valorilor date de relaţia 4.4 şi grupând termenii care conţin expresia înălţimii centrului de masă, se obţine:
rGG
ctgahg +−⋅= )1(2
'2α ( 4.6)
unde: α este unghiul de înclinare al autovehiculului; r – raza roţii autovehiculului; G2 şi '2G reprezintă masa pe roţile spate în poziţie orizontală şi respectiv înclinată; a – distanţa
dintre puntea din faţă şi centrul de masă al autovehiculului. Pentru a evita erorile produse de deformaţiile pneurilor şi ale suspensiei se
recomandă ca unghiul α să fie mai mare de 10…15°, suspensia la cele două punţi să fie blocată iar presiunea aerului în pneu să fie cea dată în cartea tehnică a autovehiculului. În scopul obţinerii unei exactităţi ridicate este de dorit ca determinarea înălţimii centrului de masă să se repete prin cântărirea ambelor punţi ale autovehiculului.
Tot pentru determinarea înălţimii centrului de masă se poate folosi şi „metoda platformei înclinate”. În această situaţie e necesară o platformă cu posibilitatea de înclinare acţionată hidraulic cu ajutorul unui cilindru telescopic, din care cauză metoda este aplicată mai rar.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
153
5 DETERMINAREA PE CALE EXPERIMENTALĂ A PARAMETRILOR DINAMICI ŞI ECONOMICI AI AUTOVEHICULELOR Calităţile dinamice împreună cu consumul de combustibil, constituie principalele
performanţe ale autovehiculului. Viteza medie de deplasare a autovehiculului constituie cel mai sintetic parametru de
apreciere a calităţilor dinamice. Aceasta este direct înfluenţată de viteza maximă a autovehiculului, de parametrii procesului de accelerare, de capacitatrea de a urca rampe şi de capacitatea de frânare. Cei mai importanţi parametri de apreciere a calităţilor de demarare sunt acceleraţie, timpul şi spaţiul de demarare. Capacitatea de frânare crează premisele punerii în valoare în deplină securitate, a calităţilor de accelerare, viteză şi starea drumului, dacă îndemânarea conducătorului auto şi calităţile sistemullor de direcţie, suspensie şi propulsie sunt corespunzătoare.
Calităţile dinamice ale unui autovehicul sunt în strânsă legătură cu calităţile de tracţiune, care asigură posibilităţile de deplasare ale acestuia.
Metodologia de determinare a parametrilor dinamici, de frânare şi econimici ai autovehiculelor este precis reglementată prin standarde interne şi internaţionale.
5.1 Determinarea vitezelor autovehiculului
5.1.1 Determinarea vitezei maxime Viteza maximă este cea mai mare viteză stabilă pe care o poate menţine
autovehiculul pe distanţa de 1 Km, pe drum orizontal, neted de asfalt sau beto, cu condiţia ca după încercare să nu apară o funcţionare anormală a autovehiculului şi ca acesta să poată funcţiona încontinuare. Încercarea se poate face pe un poligon special amenajat sau pe o porţiune de drum orizontal de calitate corespunzătoare, jalonat conform schemei din figura 5.1. Pentru a compensa eventualele diferenţe de nivel, traseul va fi parcurs de două ori, în ambele sensuri.
În timpul încercării, pedala de acceleraţie trebuie să fie complet apăsată,
verificându-se dacă această poziţie corespunde alimentării motorului cu debitul maxim de combustibil. Lungimea traseului de încercare trebuie aleasă astfel încât să permită
Fig. 5.1. Schema tronsonului de drum pentru determinarea vitezei maxime.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
154
accelerarea pe porţiunea de lansare I până la atingerea vitezei maxime cu care este parcursă porţiunea II pe care se efectuaează încercarea. De asemenea lungimea porţiunii de frânare III trebuie să fie suficientă pentru a asigura oprirea în deplină siguranţă a autovehiculului.
Viteza maximă se determină ca viteză medie de deplasare pe tronsonul de drum pe care se face încercarea II, care are o lungime de 1 Km, prin măsurarea duratei de timp în care se efectuează încercarea:
ttLv 1000
max == ( 5.1)
în care: L este lungimea tronsonului pe care a fost efectuată încercarea, 1000 m; t – timpul în care este parcursă distanţa L. Rezultatul final al încercării se calculează ca medie a cel puţin patru încercări, efectuate două într-un sens, două în celălalt sens.
Pentru măsurarea timpului este indicat să se folosească un cronometru cu precizie de 0,05s, declanşat şi oprit de experimentatorul aflat în autovehiculul încercat, în momentul trecerii prin dreptul jaloanelor, care marchează începutul A, respectiv sfârsitul sectorului de încercare B. Dacă viteza maximă este foarte mare, pentru mărirea preciziei de măsurare, acţionarea aparatului de măsurare a timpului se face cu ajutorul unei instalaţii cu celule fotoelectrice sau a unei instalaţii cu contact dispusă pe suparafaţa drumului.
În cazul în care motorul autovehiculului este prevăzut cu limitator de turaţie, determinarea vitezei maxime se face cu regulatorul scos din funcţiune.
La încercările efectuate pentru omologarea noilor tipuri de autovehicule se determină viteza maximă pentru fiecare treaptă.
În timpul efectuarii probelor pentru determinarea vitezei maxime trebuie acordată o atenţie deosebită menţinerii nivelului regimului optim, fiind necesară rularea cu viteză redusă între probe pentru asigurarea răcirii astfel încât temperatura uleiului să ajungă la temperatura de regim.
În fişa de măsurare se va indica şi turaţia motorului la care s-a obţinut viteza maximă, utilizând în acest scop un traductor de turaţie care să asigure precizia impusă de efectuarea probelor.
5.1.2 Determinarea vitezei minime Viteza minimă stabilă este viteza cea mai mică cu care autovehiculul se poate
deplasa într-o anumită treaptă de viteză, uniform, fără bătăi şi şocuri în transmisie, sau opriri ale motorului, iar la apăsări bruşte ale pedalei de acceleraţie motorul se accelerează normal. Viteza minimă stabilă oferă o informaţie referitoare la stabilitatea funcţionării grupului motopropulsor la turaţii coborâte. În condiţii concrete de trafic intens urban o importanţă deosebită o prezintă viteza minimă stabilă din prima treaptă de viteze, iar în condiţiile de deplasare interurbană cea din ultima treaptă de viteze.
Pentru determinarea vitezei minime stabile este necesar un sector de drum similar cu cel folosit pentru determinarea vitezei maxime, figura 5.1, cu deosebirea că perţiunea de încercare II este mult mai scurtă, are doar 200 m. Autovehiculul intră pe porţiunea de drum de încercare II cu viteza minimă stabilă în treapta pentru care se face încercarea şi parcurge întreg tonsonul II cu această viteză. După finalizarea probei

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
155
se verifică dacă motorul se accelerează normal la apăsarea bruscă a pedalei de acceleraţie. Traseul se parcurge de mai multe ori în ambele sensuri, măsurându-se timpul t necesar parcurgerii lui, iar viteza medie stabilă se calculează ca medie a vitezelor medii calculate cu relaţia:
ttLv 200
min == ( 5.2)
Pentru determinarea vitezei minime stabile se pot folosi şi alte aparate utilizate
pentru măsurarea vitezei de deplasare, cum sunt dispozitivele spaţiu-viteză-timp, de tip roata a 5-a.
5.1.3 Determinarea vitezei medii În practica încercărilor şi a exploatării autovehiculelor se definesc trei tipuri de
viteze medii de deplasare: viteza medie tehnică; viteza medie tehnică de exploatare; viteza comercială.
Viteza medie tehnică rezultă prin împărţirea spaţiului parcurs la timpul efectiv necesar pentru parcurgerea lui.
Viteza medie tehnică de exploatare, rezultă prin împărţirea spaţiului parcurs la timp, ţinându-se seama de opririle legate de circulaţie: la stopuri; bariere de cale ferată; la intersecţii; etc.
Viteza medie comercială, are în vedere atât opririle legate de circulaţie, cât şi cele legate de exploatare: timpii necesari depanărilor; timpii necesari încărcării sau urcării pasagerilor; timpii necesari descărcării sau coborârii pasagerilor; etc.
Viteza medie tehnică este legată numai de calităţile tehnice şi de configuraţia drumului, celelalte viteze depind şi de condiţiile de exploatare şi de mentenabilitatea autovehiculului.
Pentru a avea o semnificaţie practică, viteza medie trebuie raportată la condiţiile concrete de deplasare: condiţiile meteorologice; categoria drumului; particularităţile drumului; etc.
Determinarea orcăreia dintre vitezele medii enumerate mai sus presupune înregistrarea amănunţită a duratelor de circulaţie şi staţionare, pe un traseu de lungime stabilită, ales în corelaţie cu destinaţia principală a autovehiculului încercat. O astfel de evidenţiere se obţine comod cu ajutorul unui vitezograf montat la bordul autovehiculului.
Deplasarea autovehiculului în timpul încercărilor se face cu viteza maximă admisă de regulamentul de circulaţie, iar în cazul drumurilor de categorie inferioară în condiţiile asigurării integrităţii mărfurilor transportate şi a evitării distrugerii unor componente ale autovehiculului. Având în vedere cele menţionate mai sus se poate trage concluzia că vitezele medii ale autovehiculului depind şi de calităţile suspensiei autovehiculului. Traseele stabilite pentru încercare vor fi parcurse în ambele sensuri, rezultatul încercării fiind media rezultatelor pe sens de deplasare. Lungimea traseelor de încercare se alege de 50-100 Km, funcţie de obiectivul urmărit.
Funcţie de caracteristicile de viteză obţinute pentru anumite trasee se pot stabili cicluri standardizate de încercare care pot stabili cicluri standardizate de încercare care pot fi folosite la determionări pe standuri cu rulouri sau în poligoane. Astfel de cicluri

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
156
satandardizate de încercare se folosesc pentru determinarea consumului de combustibil şi al emisiilor poluante.
5.2 Determinarea parametrilor de accelerare şi de frânare
5.2.1 Determinarea parametrilor de accelerare Principalii parametrii de apreciere a calităţilor de demarare sunt timpul şi spaţiul de
demarare, adică timpul, respectiv spaţiul în care autovehiculul pornind de pe loc ajunge la 90% din viteza maximă, vmax, pe care o poate dezvolta, precum şi aceeleraţiile pe care le poate obţiene în diferitele trepte de viteză. De asemenea, calităţile de accelerare se exprimă prin timpul sau spaţiul în care autovehiculul, pornind de la viteza iniţială vo va atinge o viteză finală vf, respectiv acceleraţia medie a procesului de demarare. Indiferent de forma în care sunt prezentaţi aceşti parametrii de apreciere a calităţilor de demarare, dacă nu se stabileşte o lege de variaţie continuă pe timpul demarajului, ei caracterizează de fapt acceleraţia medie a procesului de demarare.
Pentru determinarea completă a calităţilor de accelerare se pot utiliza aparate de tipul “spaţiu-viteză-timp”, numite “roata a 5-a”, cu ajutorul cărora pot fi înregistrate variaţiile în timp a spaţiului, vitezei şi acceleraţiei.
Determinarea calităţilor de accelerare cu schimbarea treptelor de viteze –
Accelerarea autovehiculului se face de la punct fix, adică de la viteza vo=0. Acesta se aduce în dreptul jalonului care marchează începutul sectorului de măsurare, cu motorul
încălzit, ambreiajul decuplat şi cutia de viteze cuplată în treapta I-a. Conducătorul auto porneşte de pe loc cuplând brusc ambreiajul şi apăsând pedala de acceleraţie până în poziţia extremă, având însă grijă ca pornirea din loc să nu fie însoţită de zmucituri. În continuare schimbarea treptelor de viteze se face la atingerea turaţiei nominale, rapid, fără zgomot, prin menţinerea pedalei de acceleraţie în poziţia extremă, corespunzătoare funcţionării pe caracteristica externă, până la atingerea a 90% din viteza maximă a autovehiculului.
Utilizând “roata a 5-a” şi aparatura de achiziţie stocare,
prelucrare şi vizualizare a datelor se trasează diagramele s=f(t), v=f(t) şi v=f(s). Pe aceste curbe se marchează şi momentele schimbării tuturor treptelor de viteze, iar pe diagrama v=f(t) este indicat să se marcheze şi momentele corespunzătoare parcurgerii spaţiilor de 500 m şi 1000 m, figura 5.2. Pentru de determinarea duratei aceeerării până
Fig. 5.2. Diagrama de demarare a unui autoturism
echipat cu cutie de viteze cu patru trepte.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
157
la 500 m şi 1000 m, se procedează în mod similar, măsurând timpul la pornirea din loc până la momentul trecerii prin dreptul jaloanelor care marchează limitele sectoarelor respective. Această durată poate fi determinată cu mai multă precizie prin prelucrarea întregistrării efectuate în timpul încercării. Folosind datele din figura 5.2. se trasează variaţia vitezei funcţie de spaţiu v=f(s), prezentată în figura 5.3.
Determinarea calităţilor de accelerare într-o singură treaptă de viteze – accelerarea autovehiculului se efectuează de la viteza minimă stabilă în treapta respectivă până la turaţia nominală sau până la 90% din viteza maximă pentru treapta de viteză maximă. Pe tot timpul demarajului pedala de acceleraţie comandă debitul maxim de combustibil, motorul funcţionând pe caracteristica externă.
Parametrii caracteristici procesului de demarare se înregistrează cu un aparat de tipul “roata a 5-a”, iar cu datele obţinute se trasează curbele v=f(t) şi v=f(s).
În figura 5.4, este prezentată diagrama de aceelerare v=f(t), pentru o autoutilitară echipată cu motor cu aprindere prin comprimare şi cutie de viteze cu patru trepte, pentru treapta a IV-a. Din diagramă se observă că acelerarea autovehiculului de la o viteză de 30 Km/h la 65 Km/h se face în timp de aproximativ 50 s, repriza obţinută fiind relativ bună pentru categoria de autovehicule încercată. Variaţia acceleraţiei a=f(v), figura 5.5 se obţine prin derivare (grafică, analogică sau numerică) a funcţiei v=f(t). Pornind de la aceste curbe carateristice fiecărei trepte de viteze se obţine variaţia acceleraţiei pe trepte, funcţie de viteza de
Fig. 5.3. Diagrama de demarare în funcţie de spaţiul
parcurs.
Fig. 5.4. Diagrama de accelerare în treapta a IV –a patru o
autoutilitară echpată cu MAC.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
158
deplasare a=f(v), prezentate în figura 5.6 a şi b. Curbele de accelerare a=f(v), caracteristice autovehiculelor de capacitate mică şi mijlocie, figura 5.6,a, sunt asemănătoare cu cele ale caracteristicii dinamice şi numărul lor depinde de numărul de
trepte din cutia de viteze. Trebuie menţionat faptul că în cazul autovehiculelor grele, caracteristica prezentată în figura 5.6, b, acceleraţia obţinută în treapta a II-a poate să fie superioară celei din treapta a I-a, datorită inerţiei mari a transmisiei.
5.2.2 Determinarea parametrilor de frânare Din punctul de vedere al autovehiculului, siguranţa circulaţiei este influenţată în
principal de capacitatea de frânare a acestuia şi de stabilitatea şi manevrabilitatea autovehiculului în timpul procesului de decelerare. O influenţă deosebită o are şi viteza medie de circulaţie, precum şi condiţiile de aderenţă.
Odată cu dezvoltarea intensă a transporturilor auto au apărut o serie de documente normative internaţionale dintre care menţionez în primul rând Regulamentul nr. 13 al C.E.E. a O.N.U, în care sunt prezentate prescripţiile referitoare la omologarea sistemului de frânare al autovehiculelor.
Calităţile de frânare se apreciază prin spaţiul de frânare din locul începerii acţionării pedalei de frână până la oprirea autovehiculului, pornind de la anumite valori iniţiale ale
Fig. 5.5. Caracteristica a=f(v), obţinută prin
derivarea v=f(t).
Fig. 5.6. Diagrama acceleraţiei pe trepte de viteză: a – pentru un autovehicul de clasă mică sau medie;
b – pentru un autovehicul greu.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
159
vitezei. Aceeleraţiile medii şi maxime de frânare reprezintă şi ele parametrii importanţi ai procesului de frânare. O caracterizare completă din punct de vedere cinematic a procesului de frânare, se obţine trasând diagrama de frânare a=f(t), figura 5.7, a. Pentru înţelegerea completă a procesului de frânare, această diagramă poate fi completată şi cu alţi parametrii cum sunt: variaţia forţei aplicate elementului de comandă, figura 5.7, b; variaţia vitezei unghiulare a roţilor frânate; variaţia presiunii din insatlaţia de frânare; etc.
Pe baza diagramelor mai sus menţionate se determină şi alţi parametrii cum sunt: timpul de răspuns iniţial, timpul de frânare efectivă şi timpul de revenire, a căror valori caracterizează inerţia sistemului de frânare şi influenţează deceleraţia maximă şi medie a frânării.
Diagramele de frânare rezultate în urma determinărilor experimentale poate fi schematizate pentru simplificarea investigaţiilor teoretice şi experimentale. În figura 5.8 este prezentată una dintre cele mai utilizate scheme de simplificare, conform căreia procesul de frânare se desfăşoară în două faze distincte:
Pe timpul de răspuns iniţial convenţional tri’, mişcare a autovehicului cu deceleraţie zero;
Pe timpul de frânare activă convenţional tfa’, menţinerea autovehiculului uniform decelerată cu acceleraţia am. În limita unei erori mai mici de 6,5%
pentru calculul parametrilor de frânare specifică schematizării din figura 5.8 se folosesc următoarele relaţii:
ffi
im stv
va−⋅
⋅=2
21 ( 5.3)
i
fifri v
tvst
⋅−⋅=
2' ( 5.4)
Fig. 5.7. Diagramele de frănare: a) diagrama de acceleraţie; b) diagrama forţei de acţionare aplicate
asupra elementului de comandă.
Legendă a-momentul începerii acţionării pedalei de frână; b-momentul opririi automobilului; tf-timpul total de frânare; tcf-timpul de creştere a forţei de frânare; tfa-timpul de frânare activă; tri-timpul de răspuns iniţial.
Fig. 5.8. Diagrama de frânare schematizată.
1- evoluţia reală; 2 – evoluţia schematizată.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
160
Fig. 5.9. Diagrama dependenţei forţei la pedală Fp
funcţie decursa pedalei lp.
m
iriif a
vtvs⋅
+⋅=2
2' ( 5.5)
în care: vi este viteza iniţială; tf – timpul de frânare; sf – spaţiul de frânare; am – deceleraţia. O relaţie de tipul 5.5 stă la baza normării spaţiului de frânare în Regulamentul Nr. 13 al C.E.E. a O.N.U. Din analiza acestei relaţii rezultă faptul că un spaţiu de frânare excesiv de mare poate fi datorat, unei deceleraţii prea mici pe timpul intervalului de frânare activă, unui timp de răspuns iniţial prea mare sau ambelor cauze.
Determinarea eficienţei frânei de serviciu – se face prin încercări de parcurs sau pe
standuri. Încercarea pe standuri cu rulouri a căpătat o mare răspândire în perioada actuală deoarece permite determinarea directă a forţei de frânare la roţile autovehiculului pentru diferite forţe de apăsare a pedalei de frână. Cu toate că condiţiile de încercare pe stand diferă de cele reale în ceea ce priveşte repartiţia greutăţii pe punţi, motiv pentru care se modifică limitarea de către aderenţă a forţelor de frânare, acestea furnizează date utile cu privire la funcţionarea şi reglarea frânelor. Din acest motiv standurile pentru încercarea frânelor sunt utilizate tot mai mult în intreprinderile constructoare, în service-uri şi secţii de întreţinere şi reparaţii şi în institutele de cercetare. Spre deosebire de aceste încercări, prin încercările de parcurs, se obţin rezultate care caracterizează calităţile reale ale sistemului de frânare.
Indiferent de modul de încercare a sistemului de frânare, înaintea acesteia autovehiculul trebuie supus unui control pentru a certifica că se află în stare perfectă de funcţionare. Garniturile de fricţiune trebuie să fie rodate prin rulări prealabile, iar jocurile dintre garnituri şi tamburi sau discuri trebuie să fie reglate la valorile prescrise în documentaţie. Înaintea încercării se efectuează proba de rulare liberă, prin care se
verifică dacă apar rezistenţe suplimentare la înaintare.
În timpul încercărilor pentru determinarea eficienţei frânei de serviciu se apasă brusc pedale de frână, după care se menţine forţa de apăsare a pedalei de frână la o valoare constantă. Datorită faptului că controlul forţei de apăsare a pedalei de frână Fp este greu de realizat, în practica încercărilor se stabileşte în prealabil dependenţa dintre aceasta şi cursa la pedală lp, figura 5.9. Pornind de la aceasta, pentru controlul forţei de apăsare pe pedala de frână Fp, se montează un limitator de cursă, iar pe timpul frânării pedala se menţine apăsată la valoarea lp a cursei.
În tabelul 5.1., sunt centralizate

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
161
vitezele iniţiale şi eforturile la pedală impuse pentru determinarea prin încercare a eficienţei frânei diferitelor tipuri de autovehicule.
Tabelul 5.1
Condiţii de încercare a instalaţiilor de frânare Caracteristica autovehiculului şi a
autotrenului Condiţiile măsurării
Efortul maxim aplicat la pedala sau maneta frânei [N]
Categoria autovehiculului sau a autotrenului
Masa totală [Kg]
Viteza [Km/h]
Cu piciorul Cu mâna Autovehicule pentru transport persoane cu număr maxim de locuri =8*
- 80 ±2% 500 400
Autovehicule pentru transport persoane cu număr de locuri mai mare de 8*
Până la 5000
60 ±2% 700 400
Autovehicule şi autotrenuri pentru transport de persoane
Peste 5000 60 ±2% 700 400
De la 1000 la 3500
70 ±2% 700 400
Peste 3500 până la 12000
50 ±2% 700 400
Autovehicule şi autotrenuri pentru transport de mărfuri
Peste 12000
40 ±2% 700 400
*numărul de locuri indicat nu cuprinde locul conducătorului. O deviere mare de la direcţie de deplasare în timpul frânării, indică un reglaj diferit
al frânelor pe cele două părţi, materiale de fricţiune cu caracteristici diferite, uzuri diferite sau dezechilibrări ale circuitului hidraulic.
Eficienţa frănei de siguranţă şi a celei auxiliare se determină în mod similar cu deosebirea că efortul depus la pedala sau levierul de comandă al frânei de siguranţă nu trebuie să depăşească 400 N.
Determinarea esficacităţii frânelor
încălzite – Eficienţa frânelor încălzite se apreciază comparând parametri obţinuţi în cazul frânelor reci cu cei obţinuţi în stare încălzită. Încălzirea frânelor se realizează prin accelerări şi frânări intense executate succesiv pe un drum orizontal, între anumite limite de viteză şi deceleraţie prestabilite. Condiţile de încălzire a frânelor pentru diferite categorii de autovehicule recomandate de Regulamentul Nr. 13 al C.E.E.a O.N.U. sunt centralizate în tabelul 5.2, în care sunt indicate atât vitezele iniţiale şi finale,
Fig. 5.10. Variaţia în timp a spaţiului de frânare şi a
temperaturii garniturilor de frânare pentru un autovehicul care frânează succesiv de la 30 Km/h:
1,2,3,4 – temperaturile garniturilor de frecare la roata din: faţă stânga; faţă dreapta; spate stânga; spate
dreapta; 5 – spaţiul de oprire.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
162
şi numărul n de cicluri de accelerare-frânare pentru fiecare tip de autovehicul. Forţa de apăsare pe pedala de frânare este astfel dozată încât să se obţină la prima frânare o deceleraţie de 3 m/s2.
O imagine completă privind scăderea eficacităţii frânelor încălzite se obţine prin înregistrarea temperaturii garniturilor de fricţiune şi a performanţelor de frânare la sfârşitul fiecărui ciclu sau grupe de cicluri de accelerare-frânare. În figura 5.10 sunt prezentate rezultatele unor astfel de încercări efectuate prin frânarea succesivă a unui autovehicul de la viteza de 30 Km/h până la oprire, cu o frecvenţă de aproximativ 1,5 frânări pe minut. Încercarea se încheie atunci când între 3-4 măsurări succesive difererenţele de temperatură sunt sub 2 oC. După răcirea frânelor se verifică revenirea parametrilor frânării la valorile anterioare.
Tabelul 5.2
Incercarea ciclică a instalaţiei de frânare Metoda Frânarea ciclică
Condiţii Categoria autovehiculului v1
[Km/h] v2
[Km/h] ∆t [s]
n
Autovehicule destinate pentru transport persoane cu număr maxim de locuri = 8
v=0,8 vmax <100
0,5 v1 45 15
Autovehicule destinate pentru transport persoane cu număr de locuri mai mare de 8, cu masa admisibilă până la 5000 Kg
v=0,8 vmax <100
0,5 v1 55 15
Autovehicule şi autotrenuri pentru transportul mărfurilor cu masa admisibilă de la 1000 la 3500 Kg
v=0,8 vmax <100
0,5 v1 55 15
Autovehicule şi autotrenuri pentru transportul mărfurilor cu masă admisibilă peste 3500 Kg, precum şi automobile pentru transportul persoanelor cu număr de locuri mai mare de 8 şi masă admisibilă mai mare de 5000 Kg
v=0,8 vmax <60
0,5 v1 60 20
Determinarea eficacităţii frânelor ude – În cazul autovehiculelor cu capacitate mare
de trecere şi a autovehiculelor echipate cu frâne disc, este necesară stabilirea eficienţei frânelor ude.
Încercarea se face la deceleraţii constante: 3 m/s2 pentru autocamioane şi autobuze respectiv 2,5 m/s2 pentru autobuze, prin efectuarea a 15 frânări complete succesive cu măsurarea efortului la pedală de la viteza de 30 Km/h în cazul autocamioanelor şi autobuzelor şi 40 Km/h în cazul autoturismelor, la distanţe de 400 m respectiv 800 m una de alta, după ce saboţii sau plăcuţele de fricţiune au stat complet în apă timp de 2 min. În figura 5.11 este prezentată curba de variaţie a forţei necesare la pedală pentru obţinerea deceleraţiilor precizate mai sus în funcţie de numărul de frânări. Calitatea frânelor ude de a reveni la parametrii iniţiali se apreciază după numărul de frânări

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
163
necesare ca forţa la pedală pentru obţinerea deceleraţiei indicate să ajungă la valoarea stabilită pentru frânele uscate şi reci.
Determinarea timpului de răspuns şi a
timpului de revenire a frânei de serviciu – Această măsurare este o operaţie premergătoare încercării frânelor care se efectuează cu autovehiculul în staţionare, prin măsurarea presiunii la conducta de intrare în cilindrul de frână cel mai defavorizat din punctul de vedere al alimentării cu lichid de frână sau cu aer. Cursele tijelor pistoanelor se reglează pentru un joc minim dintre garniturile de
fricţiune şi tamburi sau discuri, iar în cazul instalaţiilor pneunmatice în rezervoarele de aer presiunea este egală cu presiunea la care intră în funcţiune regulatorul de presiune, sau cu 90% din presiunea cu care constructorul a calculat dispozitivul de frânare. În
cazul instalaţiilor de frânare servoasistate motorul autovehiculului este pornit.
Ca timp de răspuns iniţial sau timp de revenire se consideră timpul în care presiunea fluidului de lucru în cilindrii sau camere creşte, respectiv scade cu 10% din valoarea maximă, măsurat din momentul acţionării sau eliberării pedalei.
Timpul de răspuns şi cel de revenire se determină pe baza diagramei de variaţie a presiunii lichidului din cilindrii de frână sau a aerului din camerele de frână, la apăsarea şi eliberarea bruscă a pedalei de frână. Pentru măsurarea şi înregistrarea variaţie presiunii, figura
5.12, se recomandă folosirea lanţ de măsură adecvat în componenţa căruia sunt utilizate traductoare de presiune şi sisteme de achiziţie stocare şi prezentare a datelor. Numărul încercărilor este de minim 2.
Determinarea eficacităţii frânei de staţionare – Încercarea prânei de staţionare
(parcare) impune verificarea siguranţei reţinerii autovehiculului pe o pantă de 18%, respectiv 12% atât în poziţia de urcare cât şi în cea de coborâre. Încercarea se poate efectua atât în poligon cât şi pe o porţiune de drum care are înclinarea mai sus menţionată, şi a cărui suprafaţă este netedă şi uscată. Încercarea presupune măsurarea efortului minim de acţionare a manetei frânei de staţionare pentru a menţine autovehiculul pe una dintre pantele mai sus menţionate timp de 5 minute. În cazul
Fig. 5.11.Variaţia efortului aplicat la pedală funcţie
de frânările succesive la deceleraţie constantă:
a – cu frâne uscate; b – cu frâne ude.
Fig. 5.12.Variaţia presiunii în instalaţia de frânare:
A – momentul acţionării; B – momentul eliberării pedalei.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
164
autovehiculelor de teren se recomandă ca încercarea frânei de staţionare să se facă pe o pantă egală cu panta maximă pe care o poate urca.
Valoarea efortului la manetă determinat este maximul dintre valorile medii obţinute pentru poziţia de urcare, respectiv coborâre, iar valorile medii se calculează ca medii aritmetice pentru cel puţin trei măsurători. Valoarea efortului determinat nu trebuie să depăşească valoarea din coloana a 5-a a tabelului 5.1. Efortul se determină cu ajutorul unor manete tensometrice, sau a unor traductoare de forţă.
5.3 Detreminarea rezistenţelor la înaintare prin rulare liberă Cea mai comodă metodă utilizată pentru determinarea rezistenţelor la înaintarea
unui autovehicul este încercarea la rulare liberă. Prin rularea liberă se înţelege deplasarea unui autovehicul sub acţiunea inerţiei pe un drum rectiliniu, orizontal cu înveliş de asfalt sau beton de calitate foarte bună. Modul de desfăşurare a încercărilor de rulare liberă este precis stabilit de normativele interne şi internaţionale. Autovehiculul se apropie de sectorul de măsurare al traseului de încercare cu o viteză specifică, care depinde de tipul autovehiculului şi obiectivele încercării, iar în dreptul jalonului care marchează începutul sectorului respectiv operatorul acţionează ambreiajul, aduce manete cutiei de viteze în poziţia neută şi opreşte motorul. Cu o ruletă adecvată se măsoară spaţiul parcurs de autovehicul, iar cu un cronometru este măsurat timpul de rulare liberă. Pentru ridicarea preciziei de măsurare se poate folosi la măsurare o instalaţie de tip “roata a 5-a”.
Spaţiul de rulare liberă sr se compară cu lungimea recomandată de constructor şi oferă informaţii referitoare la starea tehnică a autovehiculului. Un spaţiu de rulare mai mic decât cel recomandat poate indica: randament scăzut al transmisiei, care poate fi datorat reglajelor incorecte, execuţiei necorespunzătoare sau uzurii; pierderi datorate frecărilor din sistemul de frânare; pierderilor din sistemul de rulare; etc. Proba de rulare liberă este o probă obligatorie care se efectuează înainte de celelalte probe pentru determinarea performanţelor dinamice.
5.3.1 Determinarea coeficientului de rezistenţă la rulare La determinarea coeficientului de rezistenţă la rulare, f, prin proba de rulare liberă,
se lansează autovehiculul în rulare liberă de la o viteză iniţială, v1, mică ( se recomandă o viteză de aproximativ 15 Km/h) şi se măsoară timpul în care autovehiculul ajunge la viteza finală v2 ( se recomandă o viteză de aproximativ 10 Km/h) prin rulare liberă. Condiţiile de drum şi cele de încercare sunt cele precizate mai sus. Pentru diminuarea influenţei abaterii de la înclinarea orizontală şi a vitezei vântului, măsurătorile se efectuează succesiv în ambele sensuri, pe acelaşi tronson de drum, valoarea finală rezultând ca medie a cel puţin două valori obţinute pentru acelaşi sens de deplasare.
La stabilirea relaţiei de calcul pentru coeficientul de rezistenţă la rulare se porneşte de la expresia bilanţului de tracţiune:
δFFFFF aprR +++= ( 5.6)

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
165
în care: FR este forţa la roată; Fp – forţa de rezistenţă a pantei; Fa – forţa de rezistenţă a aerului; Fd – forţa de rezistenţă la demarare.
Se particularizează relaţia (5.6) pentru rularea liberă a unui autovehicul între două viteze de valoare mică pe drum orizontal: FR=0 – rulare liberă; Fp=0 – drum orizontal; Fa≈0 – viteza de deplasare are valoare foarte mică, iar forţa de rezistenţă a aerului este neglijabilă în comparaţie cu celelalte forţe rezistente.
În urma acestor simplificări rezultă: δFFr = ( 5.7),
respectiv: mamgmf ⋅⋅−=⋅⋅ 'δ ( 5.8),
de unde:
tgvv
fga
f m
⋅−
=⋅−= 21'' sau δδ ( 5.9)
în care: am este acceleraţia medie; g – acceleraţia gravitaţională; m – masa autovehiculului; d’ – coeficientul maselor în mişcare de rotaţie corespunzător rulării libere.
Dacă se consideră coeficientul maselor în mişcare de rotaţie corespunzător rulării libere d’ aproximaiv egal cu 1, rezultă:
ga
tgvvf m=⋅−
≈ 21 ( 5.10)
În cazul în care proba se efectuează până la o viteză finală v2=0, valoarea coeficientului de rezistenţă la rulare se poate determina şi cu relaţia:
rsgvf⋅⋅
=2
21 ( 5.11)
unde: sr este spaţiul de rulare liberă. Deşi precizia rezultatelor nu se încadrează în cerinţele impuse de cercetarea
experimentală, pentru a evita creşterea costurilor cu încercarea metoda rulării libere este des utilizată pentru determinarea coeficientului de rezistenţă la rulare în cazul în care se doreşte obţinerea unor informaţii calitative.
Pentru ridicarea preciziei de măsurare se poate folosi la măsurare o instalaţie de tip “roata a 5-a”.
5.3.2 Determinarea coeficientului de formă Pentru determinarea coeficientului de formă cx, prin metoda rulării libere,
autovehiculul pe care se efectuează încercarea este accelerat până la o viteză apropiată de cea maximă pe o şosea care respectă cerinţele impuse pentru proba de rulare liberă. Se lansează autovehiculul în rulare liberă de la o viteză iniţială v1, la o viteză finală v2, care trebuie să fie cu 10 – 15 Km/h şi se măsoară timpul de rulare liberă t.
Acceleraţia medie am şi viteza medie vm se determină cu relaţiile:
2 respectiv 2112 vvv
tvv
a mm+
=−
= ( 5.12)

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
166
Se particularizează expresia bilanţului de tracţiune (5.6) pentru rularea liberă între două viteze de valoare mare: FR=0 – rulare liberă; Fp=0 – drum orizontal.
În urma simplificării rezultă:
021 '2 =⋅⋅+⋅⋅⋅⋅+⋅ mmxa amvAcGf δρ ( 5.13)
de unde:
2
'2
m
ma
x vAga
fGc
⋅⋅
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−⋅⋅−
=ρ
δ ( 5.14)
Dacă se consideră coeficientul maselor în mişcare de rotaţie corespunzător rulării libere d’ aproximaiv egal cu 1 şi se neglijează forţa de reistenţă la rulare, Fr≈0, rezultă:
2
2
m
mx vA
amc
⋅⋅⋅⋅
−=ρ
( 5.15)
Deşi precizia rezultatelor nu se încadrează în cerinţele impuse de cercetarea experimentală, pentru a evita creşterea costurilor cu încercarea metoda rulării libere este des utilizată pentru determinarea coeficientului de formă în cazul în care se doreşte obţinerea unor informaţii calitative.
Pentru ridicarea preciziei de măsurare se poate folosi la măsurare o instalaţie de tip “roata a 5-a”.
5.4 Detreminarea consumului de combustibil Consumul de combustibil al autovehiculului depinde de factori legaţi de construcţia
acestuia (tipul şi puterea motorului, particularităţile transmisiei şi a sistemului de rulare, etc.) şi de condiţiile de utilizare (calitatea şi structura reţelei rutiere, nivelul tehnic al sistemului de întreţinere şi reparaţie, calificarea personalului de exploatare). Din această cauză nu există un indicator unic al economicităţii autovehiculului din punct de vedere al consumului de combustibil, ci un grup de indicatori stabiliţi fie pentru condiţiile specificate, fie pentru tipuri de activităţi concrete la care acestea sunt utilizate.
Ca activitate de încercare a autovehiculului, măsurarea consumului de combustibil, are ca scop determinarea unor indicatori care să ilustreze premizele oferite de acesta pentru o exploatare rentabilă din punct de vedere a cheltuielilor de exploatare legate de asigurarea combustibililului necesar.
Măsurările de consum cu caracter de încercare nu se efectuează numai la omologarea unui autovehicul nou sau modernizat, ci şi după reparaţii capitale sau alte activităţi de mentenanţă. Măsurarea consumului de combustibil în condiţii normale trebuie să reprezinte o activitate de control periodic, pentru evitarea unor cheltuieli de exploatare mărite. Condiţiile de încercare sunt în general cele prezentate la determinarea calităţilor dinamice ale autovehiculului, afară de cazul situaţiei de exploatare deosebite (în regiuni montane, pe timp de iarnă, în tren sau pe drumuri nemodernizate etc.)

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
167
5.4.1 Parametrii de apreciere a consumului de combustibil Consumul de combustibil al autovehiculului ar trebui să fie exprimat printr-un
parametru care să ţină seama nu numai de consumul în timpul mersului ci şi de cel necesar încălzirii motorului, manevrării autovehiculului în diferite condiţii, precum şi de consumul în timpul opririlor când motorul merge în gol. Deoarece ponderea cea mai mare revine însă consumului în timpul mersului, aprecierea consumului de combustibil al autovehicului se face, în general, după mărimea acestuia.
Consumul de combustibil pentru unitatea de parcurs a autovehiculului Qs se determină cu ajutorul relaţiei:
⎥⎦⎤
⎢⎣⎡=KmKg
vG
Qa
ts ( 5.16)
în care: Gt este consumul orar de combustibil, în Kg/h; va – viteza autovehiculului în Km/h. cunoscând că:
⎥⎦⎤
⎢⎣⎡=hKgPc
G eat 310
( 5.17)
în care: ca este consumul specific de combustibil în g/Wh sau g/CPh; Pe - puterea efectivă a motorului în W sau CP, se mai poate scrie că:
⎥⎦⎤
⎢⎣⎡=KmKg
VPcQa
eas 310
( 5.18)
Din ecuaţia bilanţului de putere se poate scrie:
)sincos(6,3
2
dtdvm
KSvGfGV
P aaaaa
tr
ae
δαα
η+++= ( 5.19)
şi atunci:
)sincos(106,3
23 dt
dvmKSVGfGcQ aaaaa
tr
as
δααη
+++= ( 5.20)
unde Ga - este greutatea totală a autovehiculului; f-coeficientul de rezistenţă la rulare; α - unghiul pantei pe care urcă autovehiculul; K- coeficientul aerodinamic; S - suprafaţa secţiunii transversale a autovehiculului; va – viteza de deplasare a autovehiculului; d -
coeficientul maselor în mişcare de rotaţie; ma - masa autovehiculului; dtdva - acceleraţia
autovehiculului; ηtr – randamentul transmisiei. Pe baza acestei relaţii se observă că consumul de combustibil a autovehiculului
depinde de greutatea lui, de calitatea şi profilul drumului, de viteză, de regimul la care funcţionează, de economicitatea motorului şi de randamentul transmisiei.
Parametrul de apreciere cel mai utilizat pentru consumul de combustibil al autovehiculului este consumul la 100 km parcurşi, exprimat uneori în Kg şi de regulă în litri, după cum rezultă din următoarele relaţii:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
168
⎥⎦⎤
⎢⎣⎡=
KmKgQQ s 100
100 ( 5.21)
şi
⎥⎦⎤
⎢⎣⎡=
KmlQQ s
100100
γ ( 5.22)
în care γ - este densitatea sau masa volumică a combustibilului, în Kg/m3. De asemenea, pentru aprecierea consumului de combustibil se mai poate folosi
consumul pe tona-Km, la autocamioane şi consumul pe Km sau consumul pe călător Km la autovehiculele de transport persoane.
Determinarea consumului de combustibil presupune efectuarea unor încercări pentru stabilirea: consumului de combustibil de control; caracteristici economice de consum în funcţie de viteza uniformă; consumul în regim mixt de deplasare a autovehiculului (condiţii urbane): consumul de combustibil pe drumuri de diferite categorii; consumul de combustibil pentru operaţii auxiliare etc.
Măsurarea consumului de combustili se face cu motorul şi transmisia încălzită la temperatura de regim, cu autovehcilulele la care s-a efectuat rodajul.
5.4.2 Aparate folosite pentru măsurarea consumului de combustibil În prezent există o mare varietate de aparate utilizate pentru măsurarea consumului
de combustibil, începând cu simpli cilindri sau recipienţi gradaţi şi terminând cu aparate electronice cu afişaj numeric sau înregistrarea mărimilor asistate de minicalculatoare. În unele situaţii (unităţi de exploatare a autovehiculelor), şi cu respectarea unor metodologii de lucru precise, este posibilă măsurarea consumului de combustibil chiar şi fără utilizarea aparaturii speciale (metoda refacerii plinului rezervorului de combustibil).
În figura 5.13 se prezintă un volum iniţial de combustibil fix, similar cu un rezervor auxiliar, utilizabil pentru măsurători de consum în regim nestaţionar sau pe distanţe mici. Cilindrii 11 şi 13 ai debitmetrului, alimentaţi prin robinetul 7 de la pompa de combustibil a motorului, comunică între ei prin robinetul 12; închiderea sau deschiderea robinetului permite utilizarea unui singur cilindru sau a ambilor, obţinîndu-se astfel sensibilităţi diferite de măsurare. Cilindrul 11 împreună cu electrodul 9, fixat în izolatorii 10, reprezintă un condensator cilindric, în care combustibilul joacă rol de dielectric. Prin variaţia nivelului de combustibil din cilindrul 11 variază şi capacitatea electrică a condensatorului, condensator care este conectat la o punte capacitivă 1, a cărei alimentare se face cu ajutorul generatorului de înaltă frecvenţă 2. Dezechilibrul punţii este amplificat în amplificatorul 3 şi apoi redresat în reostatul 4. Semnalul continuu este din nou amplificat în amplificatorul 5 şi înregistrat pe banda oscilografului 6. Legătura dintre debimetru şi aparatura electrică se realizează cu ajutorul cablului ecranat 15. Controlul nivelului de lichid din debimetru se realizează cu ajutorul sticlelor de nivel 8 şi 16. Umplerea debimetrului se realizează prin pâlnia 14 şi robinetul 12.
În cazul determinării consumului de combustil în regim de funcţionare nestaţionar, concomitent cu înregistrarea consumului instantaneu, se înregistrează şi parametrii mişcării autovehiculului, cu ajutorul unui dispozitiv “roata a 5-a”.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
169
Tot pentru măsurarea consumului de combustibil este debimetrul cu pistonaşe de tip Egon Kühlner, care permite măsurarea cu înregistrare pe un contor a consumului de combustibil pe durata de timp măsurabilă (consumul orar). O variantă deosebit de indicată pentru măsurări în regim nestaţionar, permite înregistrarea pe o bandă de hârtie cerată a impulsurilor corespunzătoare consumării unui volum de combustibil egal cu volumul unei curse a pistonaşului şi a unor impulsuri de timp.
Fig. 5.13. Schema de principiu a unui debitmetru pentru măsurarea consumului de combustibil.
Fig. 5.14. Schema de montare a traductorului de debit în circuitul de alimentare a motorului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
170
Un alt debitmetru cu pistonaşe este cel de tip Flowtronic, care constă dintr-un traductor de debit cu patru pistonaşe în radial (în cruce), puse în mişcare de presiunea combustibilului, a căror mişcare liniară este transformată de un arbore cotit în mişcare de rotaţie a unui arbore pe care se află un generator de impulsuri electronice cu frecvenţă proporţională cu turaţia, impulsuri care sunt transmise la un aparat de înregistrare format dintr-un contor de impulsuri şi un microcalculator, programat să execute anumite operaţii de calcul pentru determinarea diferitelor consumuri specifice. Aparatul permite efectuarea unor măsurări pe distanţe mici şi mari, asigurând o precizie de ±0,5%, putând măsura debite de 0,5 ... 60 l/h. Modul de montare a traductorului de debit în circuitul de alimentare a motorului este prezentat în figura 5.14.
În figura 5.14,a este prezentată montarea traductorului de debit în cazul unui motor cu aprindere prin scântei, iar în figura 5.14, b în cazul motorului cu aprindere prin comprimare.
5.4.3 Determinarea consumului de combustibil în regim uniform Economicitatea de combustibil la deplasarea în regim uniform a autovehiculului se
apreciează cu ajutorul caracteristicii economice, care reprezintă variaţia dintre consumul de combustibil la suta de km (Q în l/100 Km), rezistenţa totală a drumului (ψ) şi viteza de deplasare (Va), după cum se arată în figura 5.15.
Curba superioară care limitează caracteristica economică reprezintă dependenţa dintre consumul de combustibil şi viteză la admisia plină a motorului şi deci abscisele punctelor de intersecţie a, b, c, d, e, f determină vitezele maxime ce le poate dezvolta autovehiculul în condiţii de deplasare caracterizate de fiecare curbă. Linia AA uneşte punctele consumului minim, care determină viteza economică în condiţii diferite, la o anumită treaptă de viteză.
Caracteristica economică a autovehiculului la deplasarea cu regim uniform (va=const.) poate fi obţinută pe
cale experimentală prin mai multe metode: Cu ajutorul datelor obţinute la încercarea motorului în laborator; Cu ajutorul datelor obţinute la încercarea autovehiculului în laborator; Cu ajutorul datelor obţinute la încercarea autovehiculului pe drum.
a) Determinarea consumului de combustibil cu ajutorul datelor obţinute la
încercarea motorului în laborator. La încercarea pe standul de probă a motorului de autovehicul se determină puterea efectivă Pe, şi consumul orar de combustibil Gt ale acestuia, în funcţie de turaţia n şi diferite deschideri ale clapetei carburatorului sau
Fig. 5.15.Caracteristica economică a autovehiculului
la deplasarea în regim uniform.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
171
diferite poziţii ale cremalierei pompei de injecţie. În felul acesta se obţin o serie de caracteristici parţiale (10% ... 100%), după cum este prezentat în figura 5.16.
După aceasta se determină prin calcul puterea necesară învingerii rezistenţelor de deplasare pe un anumit drum (Pr) funcţie de turaţie, cu ajutorul relaţiei:
tr
ar
PPP
ηψ +
= ( 5.23)
în care: Py este puterea necesară învingerii rezisteţelor drumului; Pa – puterea necesară învingerii rezistenţei aerului; ηtr – randamentul transmisiei. Curbele astfel obţinute se trasează tot în graficul din figura 5.16. Punctele de intersecţie ale acestei curbe cu cele ale puterii motorului la diferite regimuri, determină valorile maxime ale vitezelor autovehiculului, corespunzătoare fiecărei deschideri a clapetei de acceleraţie sau fiecărei poziţii a cremalierei pompei de injecţie.
Trasând dreptele verticale prin aceste puncte de intersecţie pe graficul consumului orar de combustibil Gt=f(n) se obţin valorile consumurilor orare Gt1, Gt2, etc., pentru vitezele automobilului
va1, va2, etc., obţinute mai înainte. Cunoscând valorile consumului orar de combustibil şi vitezele corespunzătoare se poate calcula consumul de combustibil respectiv cu ajutorul relaţiilor 5.21 şi/sau 5.22. Valorile astfel obţinute servesc la trasarea caracteristicii economice a autovehiculului la regim uniform Q=f(Va), după cum se arată în figura 5.16.
b) Determinarea consumului de combustibil cu ajutorul datelor obţinute la încercarea autovehiculului în laborator. La încercarea pe stand a autovehiuculului se determină cunsumul orar al acestuia Qt, în funcţie de forţa la roata motoare FR, la diferite viteze constante şi deschideri variabile ale clapetei de acceleraţie sau diferite poziţii ale cremalierei pompei de injecţie, date trasate în figura 5.17
Utilizând acest grafic, împreună cu caracteristica de tracţiune a autovehiculului pe un grafic de forma unei ciclograme, figura 5.18 se poate trasa caracteristica economică a autovehiculului.
În acest scop în cadranul I al ciclogramei se trasează curbele FR=f(Qt), obţinute la încercarea autovehiculului pe standul de probă. În cadranul II se trasează curbele de rezistanţă sumară la deplasare Fy=f(va) funcţie de viteză la diferite valori ale coeficientului rezistenţei totale a drumului y. În cadranul III se trasează dreptele înclinate v1, v2, v3, etc., la unghiuri obţinute cu ajutorul relaţiei:
Fig. 5.16. Trasarea caracteristicii economice a autovehiculului cu ajutorul datelor obţinute la
încercarea motorului în laborator.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
172
oii V
tg 100=α
( 5.24) în care: voi este o viteză oarecare a autovehiculului. În cadranul IV se construieşte caracteristica economică a autovehiculului prin proiecţia punctelor v1, v2, v3, etc., pe una din curbele cadranului II (curba y3 în cazul de faţă) şi de acolo în cadranul I şi III. Construcţia propriu-zisă este prezentată în figura 5.18.
Fig. 5.17. Dependenţa dintre forţa la roată şi consumul
orar de combustibil.
Fig. 5.18. Ciclograma autovehiculului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
173
c) Determinarea consumului de combustibil cu ajutorul datelor obţinute la încercarea pe drum a autovehiculului. Consumul de combustibil în acest caz se determină pentru autovehiculul încărcat cu sarcină utilă maximă. Sectorul de drum pe care se efectuează probele trebuie să fie orizontal, rectiliniu, cu îmbrăcămintea dură, asfaltat sau betonat să aibă o lungime suficientă pentru stabilizarea vitezei şi efectuarea măsurătorilor.
Pentru efectuarea încercărilor autovehiculul se aduce la viteză constantă oarecare înaintea sectorului de drum de încercat care de obicei se ia 1 km, viteză cu care se parcurge porţiunea de încercat înregistrându-se consumul de combustibil, spaţiul parcurs şi timpul, date cu care se determină consumul de combustibil pentru viteza stabilită. Această experienţă se repetă pentru mai multe valori constante ale vitezei şi se obţine caracteristica economică Q=f(va), pentru condiţiile date.
Aceleaşi încercări se repetă şi pentru alte categorii de drumuri cu rezistenţe totale y diferite şi cunoscute, pentru a obţine mai multe curbe ale caracteristicii economice.
Fiecare măsurătoare se va repeta de câteva ori în ambele sensuri ale traseului, până ce se pot alege două rezultate consecutive ce diferă între ele cu mai puţin de 5%, a căror medie corespunde fiecărei viteze.
5.4.4 Determinarea consumului mediu de combustibil La determinarea consumului mediu de combustibil, sectorul de drum de încercat se
va alege în afara localităţilor şi cu intensitate mijlocie a traficului, pentru a putea menţine o viteză de deplasare pe cât posibil constantă. Lungimea sectorului va fi de 10 km şi se va parcurge de două ori în ambele sensuri, însumându-se astfel un parcurs de 40 km.
Viteza de deplasare pentru măsurare se va alege funcţie de timpul autovehiculului, după cum urmează:
autocamioane şi autobasculante 45 ... 50 km/h; autobuze 60 ... 65 km/h; autoturisme şi variante de autoutilitare 65 ... 75 km/h.
Parcurgerea sectorului de drum în fiecare sens include pornirea autovehiculului de pe loc şi accelerarea acestuia, cu schimbarea progresivă a vitezelor până în treapta maximă de viteze, în care se va menţine viteza de deplasare constantă conform tipului de autovehicul încercat. Conform normelor în vigoare încercarea se va efectua la trei tipuri de autovehicule din producţia de serie, după ce s-a efectuat rodajul autovehiculului sau de trei ori pe acelaşi autovehicul, calculându-se valoarea medie a rezultatelor obţinute, folosind relaţia:
]100/[100
KmlS
QCm = ( 5.25)
în care: Q este valoarea medie a cănsumului măsurat, în l; s – lungimea traseului de încercat în Km.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
174
5.4.5 Determinarea consumului de combustibil în regim variabil
Caracteristica economică la regim uniform nu reflectă în suficientă măsură economicitatea obiectivă a autovehiculelor care circulă în regim variabil şi în special a celor din oraşele aglomerate în condiţii reale de exploatare, lucru ce se explică prin aceea că în oraşe regimul de mişcare uniform nu este caracteristic şi constituie mai puţin de 50% din întreaga durată a mişcării, iar în unele cazuri lipseşte în totalitate. Ponderea mişcării uniforme depinde de mărimea distanţei între opriri, respectiv dacă distanţa între opriri nu este prea mare atunci mişcarea uniformă poate să nu existe. La
distanţe mari între opriri mişcarea uniformă joacă un rol considerabil în regimul total al mişcării şi prin urmare are o pondere mare şi asupra consumului de combustibil.
Autovehiculele care circulă în oraşele aglomerate, de cele mai multe ori se deplasează în regim variabil (figura. 5.19) caracterizat prin demaraj (curba OA), mişcare staţionară (porţiunea AB), mişcarea încetinită sau prin inerţie (porţiunea BC) şi frânare (porţiunea CD).
Dintre aceste patru faze de deplasare, demarajul ocupă un loc principal şi determină într-o oarecare măsură calităţile economice în regim variabil. Cu toate acestea caracteristica economică a demarajului nu dă o vedere de ansamblu a economicităţii autovehiculelor care funcţionează în regim variabil (în condiţiile orarelor aglomerate) ci folosindu-se doar pentru studiul unor faze ale ciclului de mişcare, lucru care se explică prin faptul că această caracteristică nu ia în consideraţie fazele mişcării staţionare (dacă există), de inerţie şi frânării, iar în afară de aceasta ea se determină pentru un spaţiu şi timp de ciclu nelimitat.
Din această cauză, pentru a studia economicitatea autovehiculelor în regim variabil este necesar a se construi caracteristica economică în cicluri închise de mişcare, caracteristică ce ia în consideraţie toate regimurile principale de mişcare ce au loc în exploatare (demaraj cu schimbarea succesivă a treptelor din cutia de viteze, mişcarea uniformă, încetinire şi frânare).
Analizând economicitatea autovehiculelor la deplasarea în cicluri inchise de mişcare (figura 5.19) se observă că consumul de combustibil depinde foarte mult de distanţa între staţii. În afară de aceasta el depinde de viteza finală de demaraj şi intensitatea sa, precum şi de regimurile de încetinire şi frânare. Deci se poate concluziona că parametrul cel mai convenabil al economicităţii autovehiculelor în regim variabil (care circulă de obicei în oraşele aglomerate) îl constituie consumul total de combustibil în cicluri închise de mişcare. Acest indice este generos în comparaţie cu indicii unor faze de mişcare, fapt care îl face să se poată fi folosit la aprecierea economicităţii autovehiculelor care funcţionează în regim variabil.
Fig. 5.19. Ciclu de mişcare închis a autovehiculului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
175
Consumul de combustibil pe unitatea de drum, în cicluri închise de mişcare (Qs.cicl.) se poate determina cu o relaţie în care intră consumul absolut de combustibil (Qcicl.) în l, pentru tot ciclul de mişcare şi spaţiul (Scicl.) în m, adică:
]/[.
... KmlSQQcicl
ciclciclS = ( 5.26)
În relaţia 5.26 consumul de combustibil (Qcicl.), pentru tot ciclul de mişcare se determină ca suma consumurilor absolute de combustibil în fazele ciclului.
][. lQQQQQQQ SnestFISdcicl +=+++= ( 5.27) unde: Qd, QS, QI şi QF reprezintă consumul de combustibil în l pentru fazele de demaraj, mişcare uniformă, încetinire şi frânare; Idnest QQQ += ; QF – consumul absolut în fazele de mişcare variabilă; QS – consumul absolut de combustibil în faza staţionară, care se ia din caracteristica economică a autovehiculului în regim uniform.
Luând în consideraţie relaţia 5.27 şi exprimând consumul de combustibil la 100 de km parcurşi, relaţia pentru calculul consumului de combustibil în cicluri închise de mişcare ia următoarea formă:
]100/[100.. KmlSSQQQSnest
SnestciclS +
+= ( 5.28)
unde: FIdnest SSSS ++= este spaţiul corespunzător mişcării variabile; SS – spaţiul mişcării staţionare.
Cu această relaţie se poate calcula consumul de combustibil în cicluri închise de mişcare pentru viteze medii ale ciclului. Pentru aceasta trebuie să se recurgă la încercări experimentale, întrucât un calcul analitic este aproape imposibil, în timpul cărora se înregistrează având la dispoziţie o aparatură complexă (debitmetrul pentru înregistrarea cunsumului, “roata a cincea“, etc.) variaţia vitezei şi consumului de combustibil în funcţie de spaţiul ciclului şi timpul în care se parcurge spaţiul ciclului. Aceste determinări se fac pentru ciclul nestaţionar maxim (demaraj cu intensitate maximă până la viteza de 50 km/h), obţinându-se o diagramă de felul celei prezentate în figura 5.20.
Fig. 5.20. Ciclurile mişcării nestaţionare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
176
Ciclul nestaţionar maxim, astfel determinat, se împarte în cicluri mai mici corespunzătoare spaţiilor Snest1, Snest2, etc., cărora le corespunde o anumită viteză medie. După aceea pentru fiecare ciclu, exmplu ciclul 2, se determină spaţiile fiecărei faze a ciclului (Sd2, SI2 şi SF2), cu ajutorul cărora se determină consumurile Qd2, QI2 şi QF2, consumuri care se introduc în relaţia 5.28. În felul acesta se determină consumul de combustibil corespunzător vitezei medii a ciclului 2. În continuare se procedează identic, şi pentru celelalte cicluri de mişcare nestaţionară, iar în cazul în care spaţiul ciclului este mai mare decât cel maxim al mişcării nestaţionare, consumul de combustibil QS se ia din caracteristica economică a mişcării uniforme corespunzătoare vitezei de 50 km/h.
Pentru a se putea trasa variaţia consumului de combustibil în cicluri închise de mişcare funcţie de viteza medie a ciclului, trebuie determinată această viteză pentru fiecare ciclu în parte. La calculul vitezei medii pentru ciclurile arătate se admite că Scicl=Snest1, Scicl=Snest2, Scicl=Snest3, Scicl=Snestmax şi Scicl>Snestmax. La determinarea timpilor corespunzători mişcării nestaţionare se procedează conform figurii 5.20, determinând timpii corespunzători tnest1, tnest2, tnest3, tnestmax.
În cazul în care Scicl>Snestmax, ciclul respectiv va avea şi fază a mişcării staţionare, adică SS=Scicl-Snestmax. Având aceste elemente se poate determina viteza medie corespunzătoare fiecărui ciclu folosind relaţia:
]/[6,36,3.. hKmttSS
ttttSSSSV
Snest
Snest
FISd
FISdciclm +
+=
++++++
= ( 5.29)
Cu mărimile astfel determinate se trasează caracteristica economică a mişcării variabile (variaţia consumului de combustibil în cicluri închise de mişcare în funcţie de viteza medie a ciclului), caracteristică prezentată în figura 5.21.
Pe baza curbelor din figura 5.21 se poate construi caracteristica economică universală care exprimă depedenţa consumului de combustibil în cicluri de mişcare (QS.cicl.) pentru o valoare dată a vitezei medii a ciclului (Vm.cicl.). O asemenea caracteristică complexă obţinută la încercarea autobuzului TV-2U.E este prezentată
în figura 5.22. În felul acesta se obţine un grafic complex care stabileşte legătura dintre consumul
de combustibil în cicluri de mişcare, viteza medie pe cicluri, spaţiul ciclului şi viteza de demaraj. Deci, având la dispoziţie o asemenea caracteristică pot fi determinate consumurile optime şi regimurile de mişcare ale autovehiculului care lucrează în oraşele aglomerate în aşa fel încât ele să asigure economicitatea optimă în exploatare.
Pentru compararea autovehiculelor de clase şi capacităţi diferite este mai indicat ca consumul de combustibil în l/100 km să fie raportat la unitatea de sarcină utilă sau la
Fig. 5.21. Caracteristica economică a autovehiculului
în cicluri închise de mişcare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
177
numărul de pasageri. În cazul când consumul de combustibil la 100 de km se raportează la unitatea de sarcină utilă relaţia 5.28 capătă forma:
]100
[100.. tKm
lSSQQ
GQ
Snest
Snest
uciclS +
+= ( 5.30)
unde: Gu este sarcina utilă a autovehiculului corespunzătoare unei capacităţi determinate a lui.
Pentru cazul când consumul de combustibil la 100 de km se raportează la numărul de pasageri, relaţia 5.28 ia următoarea formă:
]100
[100.. nKm
lSSQQ
nQ
Snest
SnestciclS +
+= ( 5.31)
unde: n este numărul de pasageri corespunzător unei capacităţi determinate.
5.5 Detreminarea forţei de tracţiune Pentru autovehiculele destinate transportului de mărfuri echipate cu remorci şi
pentru tractoare este foarte importantă măsurarea forţei de tracţiune pentru a determina posibilităţile de tractare a remorcilor sau ale maşinilor agricole. Pentru a pune în evidenţă forţele de tracţiune corespunzătoare diferitelor viteze se trasează caracteristica de tracţiune a autovehiculului supus încercării.
Fig. 5.22. Caracteristica universală.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
178
5.5.1 Determinarea forţei de tracţiune pe standuri cu rulouri Pentru determinarea staţionară a calităţilor de tracţiune ale autovehiculelor se
folosesc instalaţii speciale construite pe baza principiului reversibilităţii, care constă în aceia că autovehiculul cercetat este fix şi “drumul” se mişcă. Roţile motoare ale autovehiculului se aşează pe rulouri rotitoare, care joacă rolul drumului mobil, astfel încât axele lor de rotaţie să se afle în acelaşi plan vertical. Forţa la roată este măsutrată cu ajutorul unui dispozitiv de frânare (mecanic, hidraulic sau electric), care acţionează asupra arborelui ruloului.
Pentru menţinerea pe rulouri, autovehiculul este ancorat cu un cablu de un punct fix, poziţia cablului fiind în planul orizontal care trece prin axele roţilor, perpendicular pe punctul care se află la jumătatea distanţei dintre cele două roţi motoare. În mod uzual roţile nemotoare se aşează pe platforme de cântărire.
Mărimea forţei de tracţiune la roţile motoare se poate determina cu una dintre următoarele metode:
se măsoară momentul de răsucire la arborele ruloului; se măsoară forţa preluată de punctul de fixare al autovehiculului; se măsoară sarcina care acţionează asupra roţilor nemotoare.
În figura 5.23, este prezentată schematic o instalaţie dinamometrică pentru măsurarea forţei de tracţiune.
În această figură au fost folosite următoarele notaţii: G – greutatea autovehiculului; Z1 – reacţiunea normală la roţile punţii faţă; Z2 – reacţiunea normală la roţile punţii spate; F1 – forţa indicată de dinamometrul fixat între autovehicul şi punctul de ancorare; F2 – forţa indicată de sistemul de frânare al ruloului; F3 – forţa indicată de sistemul de cântărire al punţii nemotoare; Fm – forţa de tracţiune la roţile motoare; Ff2 – forţa de rezistenţă la rulare pe rulou; Mt – momentul de torsiune la arborele ruloului; Mf – momentul pierdut prin frecare în lagăre; Mw – pierderile prin frecarea tamburului cu
Fig. 5.23. Schema standului cu rulouri pentru măsurarea forţei de tracţiune.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
179
aerul; rd – raza dinamică a roţilor motoare; Rt – raza tamburului; l – braţul frânei ruloului; L – ampatamentul autovehiculului; a şi b – cotele de poziţie a centrului de masă faţă de puntea din faţă, respectiv din spate.
Momentul de torsiune la arborele ruloului este: ωMMlFM ft ++⋅= 2 ( 5.32)
iar forţa de tracţiune la roţile motoare va fi:
fZRM
Ft
tm ⋅+= 2 ( 5.33)
unde f este coeficientul de rezistenţă la rulare între pneu şi rulouri. Pentru determinarea forţei de tracţiune funcţie de forţa F1 care reţine autovehiculul
pe standul cu rulouri se face cu relaţia:
dt
tm rR
RfZFF
+⋅⋅+= 21 ( 5.34)
Pentru determinarea forţei de tracţiune la roţile motoare funcţie de sarcina ce revine la roţile punţii nemotoare, se scrie ecuaţia de echilibru a momentelor în raport cu axa roţilor motoare:
,01 =⋅−⋅+⋅ bGrFLZ dm ( 5.35) de unde:
( )dd
m rLZG
rLZbG
F⋅−
=⋅−⋅
= 111 ( 5.36)
Ultima metodă este cea mai precisă, relaţia 5.36 fiind des utilizată pentru calculul forţei de tracţiune.
Standurile cu rulouri construite după schema 5.23 au căpătat o largă răspândire în practica încercării autovehiculelor.
În figura 5.24 este prezentată o schemă de stand cu rulouri, la care prin momentul
de inerţie al rulourilor s-a urmărit să se apropie condiţiile de încercare pe stand cu cele din exploatare, şi anume energia necesară accelerării rulourilor este egală cu energia necesară accelerării masei în mişcare de translaţie a autovehiculului încercat. În cazul unui astfel de stand, forţa de tracţiune se măsoară prin echilibrarea cadrului oscilant.
Fig. 5.24. Schema unui stand cu rulouri.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
180
Rulourile au forma unor cilindri goi la interior, iar pentru determinarea greutăţii lor poate fi utilizată relaţia:
,2
2 21
2
GGsDgbDG ++⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
⋅+⋅⋅⋅⋅= γππ ( 5.37)
în care: D este diametrul exterior al rulourilor; b – lăţimea rulourilor; g – grosimea materialului din care este confecţionat ruloul; s – grosimea pereţilor laterali ai rulourilor;
γ – greutatea specifică a materialului ruloului; G1 – adausul de greutate pentru nervurile de întărire; G2 – adausul provenit de la părţile în mişcare de rotaţie ale autovehiculului care se încearcă. Lăţimea rulourilor standurilor pentru încercarea autoturismelor este de ≈ 300 mm, aceasta crescând corespunzător pentru autocamioane şi autobuze.
Dependenţa greutăţii rulourilor, pentru un stand de forma celui din figura 2.24, funcţie de diametru este prezentată în graficul din figura 5.25. În cazul în care lăţimea rulourilor permite încercarea mai multor tipuri de autovehicule, pentru acordarea standului cu vehiculul încercat şi regimul de încercare pot fi utilizate mase volante detaşabile, care pot fi cuplate şi decuplate prin comandă de la distanţă în cazul standuriulor perfecţionate.
Forţa de tracţiune la circumferinţa rulourilor Fm se detrmină cu relaţia:
( ) ,12 dtdv
rJJF arm ⋅⋅+= ( 5.38)
în care: Jr este momentul de inerţie de bază al părţilor în mişcare de rotaţie ale standului în raport cu axa rulourilor; Ja – momentul de inerţie adiţional în raport cu axa ruloului; r – raza ruloului; v – viteza; t – timpul.
Forţa de tracţiune Fm, în timpul accelerării autovehiculului se determină cu relaţia:
dtdvmFm ⋅= ( 5.39)
unde m este masa autovehiculului. În timpul încercărilor efectuate pe standuri cu rulouri se urmăreşte să se echivaleze
efectul inerţie a standului cu cel al masei autovehiculului, exprimată matematic prin egalarea relaţiilor 5.38 şi 5.39:
( ) 2
1r
JJm ar ⋅+= . ( 5.40)
Menţinerea echivalenţei energetice pe tot parcursul încercării este posibilă prin reglarea permanentă a valorii Ja. Pentru reglarea lui Ja este necarar ca frâna care acţionează asupra arborelui ruloului să dezvolte un moment de răsucire egal cu:
Fig. 5.25. Dependenţa diametrului rulourilor de
diametrul lor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
181
dtdv
rJM at ⋅⋅=
1 . ( 5.41)
Momentul de răsucire pozitiv necesar frânării rulourilor în timpul simulării proceselor de accelerare poate fi generat de o frână cu curenţi turbionari sau de o frână de curent continuu, iar momentul negativ necesar antrenării rulourilor în timpul simulării proceselor de frânare poate fi produs doar de o frână de curent continuu, care poate lucra şi în regim de generator.
În figura 5.26 este prezentată schema constructivă a unui stand cu rulouri complex, care permite măsurarea forţei de tracţiune. Pe acest tip de stand poate fi determinat şi consumul de combustibil corespunzător diferitelor cicluri standardizate de funcţionare. De asemenea standul poate fi echipat şi cu echipamentul necesar determinării emisiilor poluante pentru ciclurile de funcţionare mai sus menţionate. Forţa de tracţiune se măsoară cu ajutorul cadrului oscilant şi a cântarului. În afară de frâna de curent continuu, pentru mărirea domeniului de lucru, acest stand este prevăzut cu o frână hidrauluică şi cu una mecanică.
5.5.2 Determinarea forţei de tracţiune cu ajutorul carului de frânare Pentru determinarea forţei de tracţiune la cârlig, în timpul deplasării, autovehiculul
încercat tractează un alt vehicul a cărui rezistenţă la înaintare poate fi modificată, conform programului, în domeniul impus de încercare. În limbajul utilizat de specialiştii în cercetarea experimentală a autovehiculelor astfel de vehicule sunt numite care de frânare, remorci dinamometrice sau cărucioare dinamometrice.
Fig. 5.26. Schema unui stand cu rulouri complex.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
182
Pentru a fi eficient, un car de frânare trebuie să acopere întreg domeniul de forţe reuistente specifice autovehiculelor încercate, în toată gama de forţe la roată şi viteze. Prin urmare un car de frânare trebuie: să dezvolte o forţă rezistentă maximă mai mare decât forţa de tracţiune maximă a autovehiculului încercat; să permită modificarea înălţimii cârligului de remorcare, pentru a asigura forţei de tracţiune o direcţie paralelă cu calea de rulare; să permită reglarea precisă a regimului de încercare; să fie prevăzute cu o cabină în care să lucreze operatorul şi în care să fie montate pupitrul de comandă şi instalaţia de măsurare stocare şi vizualizare a datelor obţinute în urma încercărilor; să fie deconectate automat toate traductoarele la sfârşitul unei experienţe; să permită vizualizarea parametrilor măsuraţi pe timpul încercărilor; să permită obţinerea unor informaţii primare imediat după terminarea încercării; să asigure o comunicare continuă între operator şi conducătorul auto prin radio sau interfon, în vederea sincronzării acţiunilor lor; să asigure posibilitatea măsurării în clasa de precizie impusă de standarde a următorilor parametrii: forţă de tracţiune, turaţia motorului, consumul de combustibil, patinarea roţilor motoare, spaţiul parcurs, timpul, temperatura combustibilului în cazul în care se foloseşte o metodă volumetrică de măsurare a consumului; să asigure măsurarea unor parametrii caracteristici regimului de exploatare cum sunt: temperatura lichidului de răcire, temperatura uleiului şi temperatura mediului ambiant.
Carele de frânare pot fi clasificate în funcţie de tipul frânelor, de tipul sistemului de rulare şi în funcţie de modul de deplasare până la locul în care se efectuează încercările. În funcţie de tipul frânelor utilizate aceste se clasifică în: care de frânare cu frână mecanică; cu frână hidraulică; cu frână electrică. După tipul sistemului de rulare deosebim: care de frânare pe roţi; care de frânare pe şenile; care de frânare pe roţi şi pe şenile. În funcţie de modul de deplasare până la locu de efectuare a încercărilor carele de frânare pot fi: care de frânare remorcate; care de frânare autopropulsate.
Indiferent de tipul carului de frânare, forţa de rezistenţă generată de acesta poate fi modificată şi prin modificarea greutăţii acestuia, prin lestare, în felul acesta modificându-se rezistenţa la rulare a acestuia.
În cazul carelor de frecare echipate cu frână mecanică cu tambur, aceasta se poziţionează în cadrul transmisiei în locul potrivit, astfel încât să nu fie nevoie de dimensiuni mari. Deoarece lucrul mecanic de frecare se transformă integral în căldură, tamburul închis este răcit cu apă luată dintr-un rezervor aşezat pe şasiu într-un loc convenabil. Sistemul de răcire poate fi prevăzut cu un radiator.
În figura 5.27 este prezentată schema de principiu a unui car de frânare echipat cu frînă hidraulică. Instalaţia hidrostatică de frânare este montată pe şasiul unui autocamion iar pompa cu roţi dinţate 2 plasată în locul motorului autocamionului, este acţionată de roţile motoare ale acestuia, prin intermediul transmisiei. Acesta aspiră uleiuldin rezervorul 1 şi îl refuleazăîn cutia cu supape 3 unde este situat droselul de frânare 6. Prin modificarea secţiunii de trecere a uleiului se modifică sarcina pompei şi rezistemţa la înaintare opusă de carul de remorcare, care este proporţională cu aceasta. Prin intermediul şurubului de reglaj 7 este reglată rezistenşa de inaintare, aceasta fiind controlată prin intermediul manometrului 8. La trecerea forţată a uleiului prin orificiul calibrat al dorselului cu secţiune variabilă, acesta se încălzeşte. Pentru răcirea acestuia, uleiul trece prin radiatorul 4, de unde se reîntoarce în rezervorul 1. Robinetul le permite trecerea uleiului hidraulic direct în rezervor la mersul în gol, iar

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
183
robinetul 10 permite trecerea parţială sau total a uleiului prin radiator, sensul curgerii fiind indicat prin săgeţi. Supapa de siguranţă 5 protejază instalaţia împotriva creşterii exagerate a presiunii. Pentru micşorarea neuniformităţilor (pulsaţiilor) se utilizează camera de egalizare a presiunii 9.
În figura 5.28 este prezentată schema de principiu a unui car de frânare, echipat cu
frână electrică, construit pe şasiul unui autocamion la care forţa de tracţiune se măsoară cu ajutorul unui traductor hidraulic de forţă. În calitate de frână electrică se pot folosi generatoare de curent continuu cu autoexcitaţie, cu excitaţie independentă, cu excitaţie mixtă, generatoare de curent alternativ şi frâne cu curenţi turbionari. În figura 5.29, este prezantată schema de principiu a unei frâne electrice cu generator de curent continuu cu excitaţie mixtă, a cărui indus este 5. Generatorul este antrenat de roţile motoare ale carului de remorcare prin intermediul transmisiei mecanice, el fiind legat în
Fig. 5.27. Schema instalaţiei de frânare hidostatice a carului de frânare.
Fig. 5.28. Schema unui car de frânare cu frână electrică şi dispozitiv hidraulic de măsurare a forţei de tracţiune.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
184
Fig. 5.25. Schema frânei electrice cu generator
de curent continuu cu excitaţie mixtă.
locul motorului cu ardere internă. Generatorul debitează curent reostatului de sarcină 1, care este compus din mai multe secţiuni. Reostatul este conectat în serie cu înfăşurarea de excitaţie 7, care la rândul ei este legată în serie cu înfăşurarea indusului 5. Reglajul fin al momentului de frânare se realizează cu reastatul în trepte şi continuu cu cursorul 4. Acestea sunt conectate în serie cu înfăşurarea de excitaţie 2, care este legată în paralel cu înfăşurarea indusului 5. Intensitatea curentului din circuitul generatorului este măsurată cu ajutorul ampermetrului 9, iar cea a curentului de excitaţie cu ajutorul ampermetrului 3. Tensiunea la bornele indusului se măsoară cu ajutorul voltmetrului 6. În cazul utilizării
generatorului pe post de frână se închide întrerupătorul 8. Bilanţul de tracţiune al autovehiculului încercat, pentru cazul deplasării cu viteză
constantă pe un drum orizontal este: tarR FFFF ++= ( 5.42)
unde: FR este forţa la roată; Fr – forţa de rezistenţă la rulare; Fa – forţa de rezistenţă a aerului; Ft – forţa de tracţiune.
Forţa de tracţiune se măsoară cu ajutorul traductoarelor de forţă specializate, iar în cazul carelor de frânare moderne, achiziţia, stocare, prelucrare şi vizualizarea datelor se face cu ajutorul unor sistemelor moderne comandate de calculatoare electronice special echipate cu plăci de achiziţie a datelor.
Ca traductoare de forţă pot fi folosite în parctica determinării forţei de tracţiune trebuie amintite: arcuri de oţel elicoidale sau în foi, cuplate cu traductoare de deplasare; traductoare de forţă hidrostalice, la care măsurarea forţei se face prin măsurarea presiunii din circuitul hidrostatic al traductorului; traductoare electro-rezistive; traductoare inductive.
În figura 5.30 este prezentată schema de principiu a instalaţiei tensometrice pentru
Fig. 5.30. Schema de principiu a lanţului de măsurare a forţei de tracţiune cu traductor de forţă
tensometric rezistiv.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
185
Fig. 5.31. Schema elementului de tracţiune al traductorului de forţă tensometric rezistiv.
măsurarea forţei de tracţiune. În această schemă, un singur braţ al punţii este activ, celelate braţe fiind rezistenţe
fixe. Pe elementul de tracţiune 1 se lipeşte marca tensometrică activă 2, care reprezintă prezintă rezistenţa R1 a punţii Whetstone 3, alimentată cu curent de tensiune U. Semnalul de la punte este preluat de amplificatorul 4 şi este transmis sistemului de achiziţie, stocare, prelucrare şi vizualizare a datelor 5. Sunt situaţii când se folosesc două braţe active ale punţii, caz în care mărcile tensometriceactive R1 şi R2 se aşează astfel încât variaţia rezistenţelor lor să fie de semn opus, iar celelalte două braţe ale punţii intră în schema amplificatorului sau sunt folosite pentru compensarea variaţiei de temperatură.
În figura 5.31, este prezentată schema unui element de tracţiune al traductorului de forţă tensometric rezistiv, a cărui element elastic este o tijă cu secţiune dreptunghiulară pe care se lipesc mărcile tensometrice R1 şi R2. Cele două mărci tensometrice R1 sunt lipite pe faţetele înguste ale tijei, care suns situate în planul vertical de simetrie pentru a proteja traductorul de influenţa momantelor încovoietoare, iar cele două mărci R2 lipite pe feţele opuse, late, pe o direcţie perpendiculară pe direcţie de aplicare a forţei, astfel încât să nu fie supuse deformării servesc pentru compensarea variaţiei rezistenţei datorate variaţiei de temparatură. Celelalte două braţe ale punţii R3 şi R4 întră şi schema lanţului de măsură fiind amplasate în imediata apropiere a amplificatorului de măsură. Pentru a micşora influenţa deformaţiilor de torsiune, elementul de tracţiune se cuplează între autovehiculul încercat şi carul de frânare prin intermediul unor cârlige care se pot roti faţă de direcţia în care acţionează forţa.
5.5.3 Determinarea experimentală a caracteristicii de tracţiune Caracteristica de tracţiune a autovehiculului, constă în reprezentarea grafică, pe
baza datelor obţinute prin calcul sau pe cale experimentală, a curbelor de variaţie a puterii de tracţiune Pt, vitezei de lucru v, patinării d, consumului orar de combustibil C, consumului specific de combustibil c în funcţie de forţa de tracţiune Ft. Metodica şi condiţiile de încercare pentru ridicarea experimentală a caracteristicii de tracţiune este reglementată prin norme interne şi internaţionale.
Parametrii măsuraţi pentru determinarea pe cale experimentală a caracteristicii de tracţiune sunt: forţa de tracţiune Ft; turaţia motorului n; consumul de combustibil; patinarea roţilor motoare d; spaţiul parcurs s; timpul t; temperatura combustibilului dacă consumul de combustibil se determină pe cale volumetrică. Pentru caracterizarea completă a regimului de încercare se mai măsoară: temperatura lichidului de răcire; temperatura uleiului; temperatura mediului ambiant; presiunea atmosferică; umiditatea solului, în cazul încercări tractoarelor agricole pe roţi sau pe şenile.
În cazul autovehiculelor pe roţi cu pneuri, încercarea se efectuează pe o suprafaţă curată, orizontală uscată cu îmbrăcăminte din beton sau din macadam, iar pentru

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
186
tractoarele pe şenile încercarea se face pe o pistă din argilă, orizontală, curată şi bine tasată sau pe alte terenuri care asigură calităţi de aderenţă similare. Pentru a compensa abaterile de la poziţia orizontală a pistei de încercare probele se efectuează în ambele sensuri, iar ca rezultat final se consideră media rezultatelor obţinute pentru sensurile de parcurs.
În cazul încercărilor efectuate pe pistă de argilă, pe mirişte sau pe soluri similare, este necesar să se determine şi umiditatea solului la o adâncime de 5 cm, recomandându-se ca umiditatea solului să se încadreze în valorile normale de 15% -20%. Pentru determinarea umidităţii solului, exprimate procentual se foloseşte relaţia:
[ ]%100⋅−
=sum
sussums m
mmϕ ( 5.43)
unde: msum este masa solului umed; msus – masa probei de sol uscate la temperatura de 105oC timp de 6 ore.
Încercările de tracţiune trebuie să se execute cu motorul şi transmisia la temteratura de regim, motiv pentru care se face o încălzire prealabilă sub sarcină a autovehiculului încercat.
Pentru a asigura controlul direcţie tractorului, bara de tracţiune trebuie să fie plasată la înălţimea prescrisă de constructor, iar momentul de stabilitate longitudinală la forţa de tracţiune maximăă trebuie să fie mai mic decât momentul de stabilitate la care începe cabrarea tractorului, adică să fie îndeplinită condiţia:
AGchF sslt ⋅⋅≤⋅ 1 ( 5.44) în care: Ft este forţa de tracţiune; h – înălţimea la care este plasată bara de tracţiune; G1 – sarcina statică pe roţile din faţă; A – ampatamentul tractorului; cssl – coeficientul de siguranţă la stabilitate longitudinală, care are valoare 0,8.
Caracteristica de tracţiune se determină experimental prin încărcarea treptată cu ajutorului carului de frânare în fiecare treaptă, conform prescripţiilor din programul de încercare, cu o forţă care creşte de la zero până la valoarea forţei de tracţiune care corespunde vitezei minime la care tractorul poate lucra, regim limitat de aderenţă sau de valoarea momentului motor. În timpul încercărilor motorul funcţionează pe caracteristica externă, fiind alimentat cu debitul maxim de combustibil (maneta sau pedala de acceleraţie este apăsată la maximum, comandând deschiderea completă a clapetei de acceleraţie, în cazul motoarelor cu aprindere prin scânteie echipate cu carburator, sau debitul maxim de combustibil în cazul motoarelor alimentate prin injecţie). Pentru fiecare treaptă de viteze se fac cel puţin 12 probe, în timpul cărora se menţine încărcare constantă, în felul acesta obţinându-se cel puţi 12 puncte caracteristice.
Pentru trasarea caracteristicii de tracţiune se folosesc următoarele relaţii de calcul: Viteza medie de deplasare a tractorului:
tsv = ( 5.45)
în care: s este spaţiul parcurs în timpul încercării; t – durate probei. Puterea de tracţiune a tractorului:
vFP ttr ⋅= ( 5.46) în care: Ft este forţa medie de tracţiune; v – viteza medie de deplasare a tractorului.
Patinarea roţilor motoare sau a şenilelor:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
187
[ ]%100⋅−
=s
gs
nnn
δ ( 5.47)
în care: ns este numărul de rotaţii ale roţilor motoare (steluţei) în sarcină; ng – numărul de rotaţii la mersul în gol. Pentru determinarea patinării cu precizie suficientă se recomandă ca traductoarele utilizate să transmită un numărul minim de 8 impulsuri pe rotaţie.
Consumul orar de combustibil:
⎥⎦⎤
⎢⎣⎡⋅
⋅=hkg
tV
Q cρ6,3 ( 5.48)
în care: Vc este volumul de combustibil consumat în timpul experimentului, exprimat în cm3; t – durata experimentului, în s; r – densitatea combustibilului, în g/cm3. În cazul în care temperatura la care se face experimentul diferă de temperatura standard se aplică corecţii la relaţia (5.48).
Fig. 5.32. Caracteristica de tracţiune.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
188
Consumul specific de combustibil:
⎥⎦⎤
⎢⎣⎡⋅=kWhg
PQctr
1000 ( 5.49)
în care: Q este consumul orar de combustibil, în kg/h; Ptr – puterea de tracţiune a tractorului în kW.
Rezultatele încercărilor de tracţiune se prelucrează şi se reprezintă grafic sub forma unor diagrame ce cele prezentate în figura 5.32.
În cazul autovehiculelor cu capacitate mărită de trecere se recomandă ca forţa de tracţiune la cârlig să se determine mărind forţa de rezistenţă la înaintare a carului de frânare până la patinarea roţilor sau până la oprirea motorului acestuia.
5.5.4 Determinarea rezistenţelor la înaintare prin metoda remorcării Forţa de rezistenţă la rulare, Fr, şi forţa de rezistenţă a aerului, Fa, pot fi determinate
direct prin încercarea autovehiculului pe drum folosind metoda remorcării. Determinarea forţei de rezistenţă la rulare Fr, prin metoda remorcării constă în
măsurarea cu traductoare de forţă adecvate a forţei de tractare Ft, din cablul de legătură dintre vehiculul tractor şi cel remorcat, care rulează cu viteză constantă, cu cutia de viteze în poziţia neutră. Încercarea se efectuează la viteză redusă, pe o porţiune de drum orizontală şi rectilinie, în condiţii de atmosferă liniştită, viteza vântului mai mică de 3 m/s. Încercarea se face în ambele sensuri de deplasare, iar rezultatul este media rezultatelor parţiale.
Valoarea coeficientului global de rezistenţă la rulare poate fi aproximată cu ajutorul relaţiei:
a
t
GF
f = ( 5.50)
în care: Ft este valoare medie a forţei de tracţiune din cablul de remorcare, determinată pe tronsonul pe care s-au făcut măsurătorile, care pentru condiţiile date poate fi aproximată cu valoarea medie a forţei de rezistenţă la rulare; Ga – greutatea autovehiculului.
Determinarea forţei de rezistenţei aerului Fa, prin metoda remorcării, constă în măsurarea forţei de tractare Ft, din cablul de legătură dintre vehiculul tractor şi cel remorcat, care rulează cu viteză constantă, cu cutia de viteze în poziţia neutră. Lungimea cablului trebuie să fie cel puţin de cinci ori mai mare decât lungimea autovehiculului tractor, pentru ca rezultatele încercării să nu fie influenţate de vârtejurile produse în spatele vehiculului tractor. Porţiunea de drum pe care se efectuează încercarea trebuie să fie orizontală, rectilinie cu înveliş tare din asfalt sau beton de calitate bună.
Forţa de tracţiune Ft se măsoară cu ajutorul unui traductor de forţă şi reprezintă rezistenţa la înaintare a autovehiculului remorcat. Bilanţil de tracţiune pentru condiţiile mai sus menţionate este exprimat prin relaţia:
2
21 vAcGfFFF xaart ⋅⋅⋅⋅+⋅=+= ρ ( 5.51)

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
189
în care: Fr este forţa de rezistenţă la rulare; Fa – forţa de rezistenţă a aerului; f – coeficientul de rezistenţă la rulare; Ga – greutatea autovehiculului; r – densitatea aerului; cx – coeficientul de formă pe direcţia de depasare; A – suprafaţa frontală a autovehiculului; v – viteza de deplasare a autovehiculului.
Din relaaţia (5.51) rezultă:
22vAGfF
c atx ⋅⋅
⋅−⋅=ρ
( 5.52)
Aplicarea metodei remorcării, la determinarea forţei de rezistenţă a aerului, presupune cunoaşterea coeficientului de rezistenţă la rulare.
Metoda remorcării pentru determinarea rezistenţelor la înaintare nu prezintă o precizie ridicată, dar este o metodă ieftină care este aplicată alături de metoda rulării libere atunci când se încadrează în precizia impusă cercetării.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
190
6 DETERMINAREA PARAMERTILOR DE MANIABILITATE ŞI STABILITATE AI AUTOVEHICULELOR Maniabilitatea sistemului autovehicul-conducător reprezintă capacitatea acestuia de
a se deplasa cât mai exact în direcţia comandată de conducătorul auto, adică a executa virajele dorite sau de a menţine mersul rectiliniu. O slabă maniabilitate a autovehiculului se caracterizează prin tendinţa acestuia de a-şi modifica spontan direcţia de mers, iar la rotirea volanului să se deplaseze pe o curbă care nu corespunde celei solicitate de conducătorul auto prin acţionarea sistemului de direcţie. Stabilitatea autovehiculului este caracterizată de calităţile acestuia de a se deplasa în diferite condiţii de drum meteoclimatice fără a se răsturna şi fără deraparea laterală sau alunecarea longitudinală a roţilor de la o punte sau de la toate punţile simultan. Pierderea stabilităţii apare ca rezultat al caracteristicii forţelor care acţionează asupra autovehiculului şi anume: forţa de tracţiune, de frânare, forţele laterale (deplasarea în viraj, vânt lateral puternic), forţe de inerţie, al oscilaţiilor autovehiculului şi dezechilibrării organelor componente, al calităţii drumului (denivelări, neregularităţi, înclinare longitudinală şi transversală).
Maniabilitatea împreună cu stabilitatea au mare importanţă pentru securitatea circulaţiei rutiere a autovehiculului, ele depinzând de caracteristicile sale constructive, de caracteristicile căii de rulare precum şi de caracteristicile regimului de deplasare. De asemenea maniabilitatea este strâns legată de stabilitate, deoarece cu cât stabilitatea este mai bună, cu atât mai mult traiectoria reală de mers a autovehiculului se apropie de traiectoria dorită şi imprimată de conducătorul auto. Din această cauză la determinarea maniabilităţii şi stabilităţii, trebuie determinaţi în ansamblu toţi parametrii care le caracterizează şi influenţează reciproc cum ar fi: maniabilitatea la mers rectiliniu şi în timpul manevrelor de trecere de pe o bandă a drumului pe alta sau de ocolire bruscă a unui obstacol, manevrabilitatea la intrarea şi ieşirea din curbă, capacitatea de virare statică şi dinamică, efortul la volan şi razele de virare, stabilitatea longitudinală, stabilitatea transversală în timpul virajului şi pe drumuri rectilinii cu înclinare transversală, înclinarea laterală a caroseriei, unghiurile de montaj şi unghiurile de bracare maximă ale roţilor de direcţie, precum şi raportul de transmitere unghiular al sistemului de direcţie.
Determinarea maniabilităţii şi stabilităţii autovehiculelor se face în general pe poligoane special amenajate pentru efectuarea încercărilor de ansamblu ale autovehiculului, poligoane amenajate în special pe lângă Centrele de cercetare şi marile societăţi constructoare de autovehicule. Traseul unui poligon cu o configuraţie complexe, care permite realizarea unor regimuri adecvate pentru stadiul maniabilităţii şi stabilităţii autovehiculelor este prezentat în figura 6.1.
În această figură tronsoanele liniare 1, 2, 4, 6, 7, 8, 11, 14 au lungimi diferite, tronsoanele circulare 3, 5, 9, 13, au raze diferite, tronsoanele 10 şi 12 sunt tronsoane speciale.
Tronsoanele liniare sunt în general cu înveliş de asfalt, cu înclinare longitudinală maxim 1% şi transversală de maxim 0,5%. Tronsonul special 10, este alcătuit în general din porţiuni cu obstacole de diferite forme şi dimensiuni având o lungime totală de circa 300 mm, iar suprafaţa căii de rulare prezentând mai multe tipuri de învelişuri: tronsonul

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
191
cale de rulare având praguri alternative cu denivelare de 80 mm, tronsonul cu aşa-zise “cuiburi de găină”, tronsonul cu “bare de vibrare” şi “spinare de măgar”, tronsonul cu pavaj grosier din roci eruptive “bazalt-granit-andezit” dispuse astfel încât să realizeze şi diferenţa de nivel între un maxim şi un minim de 5 cm.
Structura complexă a traseelor şi încercărilor care se efectuează pot da informaţii
atât pentru aprecierea maniabilităţii, cât şi pentru aprecierea stabilităţii. La studiul maniabilităţii, parcurgerea tronsoanelor circulare, liniare şi a pistei
speciale pot determina parametrii legaţi de maniabilitatea la mers rectiliniu şi în timpul trecerii de pe o bandă a drumului pe alta sau de ocolire bruscă a unui obstacol, intrarea şi ieşirea din curbă, capacitatea de virare şi efortul la volan.
Referitor la studiul stabilităţii, parcurgerea tronsoanelor liniare, circulare plane şi cu înclinaţie sau ale pistei speciale 10 cu anumite viteze şi încărcături, permit obţinerea de informaţii privind limitele stabilităţii în viraj şi pe traiectorii liniare, respectiv date numerice privind viteze şi acceleraţii liniare, viteze unghiulare, forţe longitudinale şi transversale sau verticale (cupluri) necesare cercetării.
Autovehiculele supuse determinării maniabilităţii şi stabilităţii trebuie să corespundă în totalitate condiţiilor tehnice stabilite prin cartea tehnică a autovehicului şi să fie încărcate la valoarea nominală a sarcinii utile, care trebuie să fie uniform distribuită pe platforma autovehiculului sau pe scaune. De asemenea în prealabil trebuie să se verifice toate jocurile din sistemul de direcţie, presiunea aerului din pneuri şi uzura anvelopelor, care conform normelor nu trebuie să depăşească 30% din înălţimea iniţială a proeminenţelor benzii de rulare. Parametrii maniabilităţii şi stabilităţii trebuie să se determine în condiţii normale de exploatare, fie în poligoane pe suprafeţe special amenajate, fie pe anumite porţiuni de drum delimitate la 500 m atunci când determinările se fac cu viteza de 10…30 km/h şi la 1000 m pentru viteze mai mari.
Fig. 6.1. Traseul unui poligon de încercare a autovehiculelor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
192
La alegerea sectoarelor sau traseelor de încercare trebuie avut în vedere aspecte de natura organizatorică şi anume: zone de pregătire – început – terminare a măsurătorilor, căile de acces şi degajare din zonă, zone de securitate şi intervenţie în caz de nevoie, de asemenea trebuie alese drumuri publice cu circulaţie redusă care în caz de necesitate (încercări dinamice) se închid, cu concursul organelor de poliţie.
Efectuarea încercărilor de determinare a maniabilităţii şi stabilităţii autovehiculelor se realizează cu conducători auto experimentaţi de înaltă calificare, instruiţi special înaintea fiecărei probe. În cazul unor încercări comparative, determinările trebuie făcute de aceleaşi persoane.
Ca rezultatele să corespundă în totalitate, agregatele transmisiei autovehiculului trebuie aduse la un regim termic normal, printr-o rulare adecvată pe un parcurs convenabil, timp în care se verifică şi reglajul aparaturii de înregistrare. Aceste încercări trebuie efectuate pe timp lipsit de precipitaţii, cu viteza vântului care nu trebuie să depăşească 3 m/s, temperatura mediului ambiant de 5…30°C (cu excepţia încercărilor efectuate pe drumuri sau piste acoperite cu zăpadă sau gheaţă pentru care domeniul de temperaturi este 3…15°C), iar diferenţa de temperatură dintre diferite experienţe să nu depăşească ±3°C.
6.1 Determinarea parametrilor de maniabilitate ai autovehiculelor Devierea autovehiculului de la traiectoria rectilinie sau de la direcţia de mers impusă
de conducătorul auto prin rotirea volanului poate fi cauzată de starea tehnică şi particularităţile constructive ale acestuia şi anume: unghiurile de montaj ale roţilor directoare, trapezul de direcţie, jocurile din sistemul de direcţie, elasticitatea laterală a pneurilor, diferenţele de presiune din pneurile roţilor din dreapta şi din stânga, tipul suspensie, cât şi de factori externi, cum sunt neregularităţile şi înclinarea transversală a drumului, vântul lateral, aderenţa şi rezistenţa la rularea diferită a roţilor din dreapta şi din stânga.
Verificarea maniabilităţii autovehiculului are drept scop determinarea unor caracteristici constructive ale autovehicului care au o influenţă nejustificată asupra capacităţii de virare (razele de viraj, unghiurile de montaj ale roţilor de direcţie, unghiurile maxime de bracare a acestora, raportul de transmitere unghiular al sistemului de direcţie şi efortul la volan) şi a unor parametri care caracterizează direct capacitatea de virare cum ar fi: maniabilitatea la mersul rectiliniu, la trecerea de pe o bandă a drumului pe alta cu ocolirea bruscă a unor obstacole, la intrarea şi ieşirea din curbă, la deplasarea pe o traiectorie în forma de S, capacitatea de virare statică şi dinamică.
6.1.1 Determinarea razelor de viraj Determinarea razelor de viraj se efectuează pe un platou orizontal a poligonului de
încercare sau pe porţiuni de drum, betonat sau asfaltat cu suprafaţa netedă, uscată şi curăţată, având o mărime corespunzătoare virării şi manevrării cu uşurinţă a autovehiculului. Pentru caracterizarea maniabilităţii interesează parametrii prezentaţi în

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
193
figura 6.2 şi anume: raza minimă de viraj Rmin, raza gabaritică exterioară de viraj Rge, raza gabaritică interioară de viraj Rgi şi lăţimea Lv definită de relaţia:
gigev RRL −= ( 6.1)
La determinarea acestor parametrii, autovehiculul se deplasează cu o viteză medie cuprinsă între 3…5 km/h atât pentru viraj la dreapta, cât şi la stânga, cu roţile bracate până la limitatoare, probele fiind repetate până când se obţin valori ale parametrilor cât mai apropiate pentru virajul la dreapta şi cel la stânga al autovehiculului.
Pentru determinarea razei minime de viraj, roata din faţa exterioară virajului, după ce autovehiculul s-a înscris în viraj cu raza minimă, se pulverizează cu vopsea sau praf de cretă şi în acest fel pe platforma de încercare se înscriu urmele roţii respective sub forma unei traiectorii circulare. Centrul instantaneu al virajului O se determină prin măsurarea diametrului cercului obţinut în două direcţii perpendiculare una pe alta. Raza minimă de viraj se măsoară de la acest centru până la mijlocul urmei lăsate de roata considerată. Razele gabaritice exterioare şi interioare se determină cu ajutorul unui fir cu plumb prin proiecţiile pe suprafaţa platoului în multe zone ale punctelor exterioare ale autovehiculului.
6.1.2 Determinarea unghiurilor de montaj ale roţilor de direcţie Maniabilitatea şi stabilitatea autovehiculului sunt influenţate în cea mai mare
măsură de geometria de aşezare a roţilor de direcţie, unghiurile de montaj a roţilor din spate şi de corectitudinea trapezului de direcţie.
Unghiurile de montaj ale roţilor de direcţie sunt prezentate în figura 6.3 şi au următoarele semnificaţii: α - unghiul de înclinare transversală a roţii (unghiul de cădere); β - unghiul de înclinare transversală a pivotului; γ - unghiul de înclinare longitudinală a pivotului (unghiul de fugă); δ - unghiul de convergenţă a roţilor de direcţie, unghi care în mod uzual se exprimă prin diferenţa a-b, în mm.
Valorile prezentate se stabilesc de către constructor la proiectarea autovehiculului, iar controalele şi reglajele sistemului de direcţie în timpul procesului de fabricaţie asigură în principiu, realizarea practică a acestora precum şi o verificare suplimentară se impune practic numai cu ocazia încercărilor de omologare a prototipului, după ieşirea autovehicului din reparaţia capitală şi prin sondaj la verificările tehnice periodice. Face excepţie convergenţa, care constituie un parametru de verificare periodică în decursul exploatării normale a autovehiculului.
Fig. 6.2. Parametrii de viraj ai autovehiculului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
194
Modificări ale sarcinii dispuse pe roţile de direcţie ca urmare a dispunerii încărcăturii în alt mod decât cel avut în vedere la proiectarea autovehicului, deformaţii remanente ale elementelor elastice sau uzurii ale unor elemente ale punţii şi suspensiei din faţă pot duce la modificări ale unghiurilor de montaj ale roţilor de direcţie, în consecinţă dat fiind rolul acestor unghiuri va fi necesară o verificare ori de câte ori autovehiculul este pregătit în vederea unor încercări la maniabilitate şi sau stabilitate, sau la încercări de fiabilitate la care se urmăreşte şi uzura pneurilor.
La ora actuală verificarea geometriei roţilor de direcţie se efectuează pe instalaţii moderne care reduc timpul necesar pentru aceasta, măsurarea unghiurilor de montaj ale direcţie, în totalitatea lor, a devenit o operaţie de control periodic al stării tehnice a autovehicului.
6.1.3 Determinarea unghiurilor maxime de bracare a roţilor de direcţie şi a raportului de transmitere unghiular al sistemului de direcţie
Aceste unghiuri se determină cu roţile de direcţie aşezate pe discuri rotitoare,
gradate din 0,5 în 0,5°, iar pe obada volanului se trasează repere cu vopsea din 45 în 45° şi fixând pe caroserie o săgeată corespunzătoare poziţiei neutre a volanului şi liniei de reper de pe volan.
Pentru determinarea unghiurilor maxime de viraj (bracaj), se aşează roţile de direcţie pe discurile rotitoare mai întâi în poziţie neutră (corespunzătoare deplasării rectilinie şi apoi se virează roţile spre dreapta respectiv spre stânga până la poziţiile extreme, determinate de limitatoare. În acest fel se măsoară unghiurile maxime de viraj spre dreapta (θd.d. şi θd.s.), respectiv spre stânga (θs.d. şi θs.s.) ale fiecărei din roţi, precum şi unghiurile maxime de rotire ale volanului faţă de poziţia neutră spre dreapta şi spre stânga (θd şi θs).
Raportul de transmitere unghiular al direcţiei se determină în limitele unui unghi de bracaj al roţilor de direcţie de până la 20°, folosind relaţia:
Fig. 6.3. Unghiurile de montaj ale roţilor de direcţie.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
195
.
....
2 b
svdviθαα
ω+
= ( 6.2)
în care: αv.d. şi αv.s. sunt valorile unghiurilor de rotire a volanului spre dreapta şi respectiv spre stânga, corespunzătoare unghiului de bracaj al roţilor.
Pentru a determina raportul de transmitere unghiular al direcţiei este comod să construim mai întâi graficul dependenţei dintre unghiul de bracaj şi cele de rotire a volanului, vb fαθ = plecând de la poziţiile extreme de rotire a volanului spre dreapta şi spre stânga cu oprirea acestuia din 45 în 45° până la poziţia neutră.
Uneori interesează ca parametrii de viraj, numărul de rotiri ale volanului corespunzător unghiurilor maxime de bracaj ale roţilor faţă de poziţia lor la deplasarea rectilinie (poziţia neutră).
6.1.4 Determinarea efortului la volan Determinarea efortului la volan permite aprecierea uşurinţei acţionării sistemului de
direcţie al autovehiculului când roţile de direcţie se întorc la trecerea consecutivă a roţilor din stânga şi din dreapta peste nişte obstacole peste artificiale şi la deplasarea pe traiectoria curbilinie în forma de “opt”.
În primul caz roţile autovehiculului se deplasează obstacolele de forma şi dispunerea celor prezentate în figura 6.4, dispuse pe o platformă betonală, orizontală şi curată.
Trecerea peste obstacole se face cu viteza de 20 km/h, consecutiv cu roţile din dreapta şi din stânga, volanul fiind menţinut tot timpul nemişcat. Efortul la volan în acest caz se calculează ca media aritmetică a trei valori, separat pentru trecerea peste obstacole cu roţile din partea stângă şi partea dreaptă ale autovehiculului.
În al doilea caz încercările pentru măsurarea efortului la volan se efectuează pe o traiectorie “în opt” trasată pe o platformă betonată uscată, orizontală şi curată, figura 6.5.
Fiecare buclă a optului este prevăzută cu câte trei părţi de 3,5m, realizate cu nişte jaloane. Dimensiunile traiectoriei prezentată în figura 6.5,a se foloseşte în cazul autovehiculelor de persoane cu mai puţin de opt locuri şi la autovehiculele de bunuri cu masa totală maximă până la 3,5 t, iar dimensiunile traiectoriei prezentate în figura 6.5,b se foloseşte la toate celelalte categorii de autovehicule. Autovehiculele din prima
Fig. 6.4. Forma şi dimensiunile pentru
determinarea efortului la volan.
Fig. 6.5. Traiectoria în “opt” pentru determinarea
efortului la volan.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
196
categorie parcurg traiectoria cu 25 km/h, iar cele dintr-a doua, cu viteza de 20km/h. Pentru aprecierea uşurinţei de acţionare a volanului, se calculează valoarea medie a eforturilor maxime aplicate la volan, obţinute în decursul a câte trei parcurgeri ale
traiectoriei în ambele sensuri de mişcare. Pentru măsurarea efortului la volan, se utilizează diferite tipuri de aparate adaptate la volanul autovehiculului în aşa fel încât să nu deranjeze manevrele conducătorului auto în timpul conducerii şi executării încercărilor. Un astfel de aparat, bazat pe măsurare tensometrică a efortului la volan, este prezentat în figura 6.6. Măsurarea forţei se foloseşte bucşa calibrată 1, montată între volan şi coloana acestuia şi traductoarele tensometrice 2, lipite pe bucşă. Unghiul de rotire al volanului se înregistrează cu ajutorul traductorului 3, acţionat prin transmisia 4, formată din două
angrenaje.
6.1.5 Determinarea maniabilităţii la mersul rectiliniu Maniabilitatea la mersul rectiliniu se determină pe sectoare de pistă sau drum
orizontale cu lungimea nu mai mică de 800 m, lăţimea nu mai mică de 3,5 m, înclinare longitudinală de cel mult 1% şi înclinare transversală nu mai mare de 0,5%. Sectorul de încercare are forma şi planul dimensional dat în figura 6.7.
După cum se observă, pe calea de rulare a traseului care trebuia parcurs sunt plasate obstacole 1 ale căror forma şi dimensiuni sunt date în figura 6.8. Aceste obstacole sunt confecţionate din tablă cu grosimea de 2 mm, iar cavitatea prismatică obţinută este umplută cu beton. Dimensiunile de gabarit au următoarele dimensiuni:
Fig. 6.6. Aparat pentru determinarea efortului la volan pe cale tensometrică.
Fig. 6.7. Sectorul de încercare pentru determinarea maniabiliţăţii la mersul rectiliniu.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
197
a=230 mm, b=600 mm, h=40 mm pentru autovehiculele de persoane cu mai puţin de opt locuri şi la autovehiculele de bunuri cu masa totală maximă până la 3,5 t, iar pentru celelalte tipuri de autovehicule a=280 mm, b=600 mm, şi h=60 mm.
Sectoarele pe care se efectuează încercările vor avea următoarele tipuri de îmbrăcăminte:
asfaltate sau betonate, netede, curate, uscate şi umezite în mod uniform pe toată lungimea de măsurare;
pietruite cu bolovani de râu, uscate şi de calitate suficient de bună pentru a permite viteza de deplasare de cel puţin 70 km/h pentru autoturisme şi 60 km/h pentru autobuze şi autocamioane în condiţii de securitate;
acoperite cu zăpadă bătătorită, care să asigure deplasarea autovehicului în condiţii de siguranţă, cu vitezele arătate mai înainte. Pe fiecare sector de drum se execută nu mai puţin de opt încercări intr-o singură
direcţie, cu mişcare uniformă şi două valori ale vitezei de deplasare: una în apropiere de viteza maximă sau de viteza minimă limitată de condiţiile de securitate şi alta cu 10…30 km/h mai mică decât cea maximă pentru autoturisme şi cu 5…15 km/h mai mică decât cea maximă pentru autobuze şi autocamioane.
Viteza de parcurgere a sectorului de măsurare se stabilizează înainte de a intra pe acest sector şi se menţine neschimbată în limită ±3 km/h, având grija ca autovehiculul să se menţină pe mijlocul benzii de circulaţie în aşa fel încât roţile acestuia să treacă peste toate obstacolele artificiale şi cu deplasări minime ale volanului. Aparatele de înregistrare se conectează la intrarea pe sectorul de măsurare şi se deconectează la ieşirea de pe acest sector, asigurând măsurarea continuă a unghiului de rotire a volanului α şi a unghiului dintre axa longitudinală a autovehicului şi direcţia de mişcare γ a timpului, precum şi înregistrarea unor semnale corespunzătoare începutului şi sfârşitului experienţei.
Înregistrarea unghiului α se face cu ajutorul unui traductor potenţiometric montat la volan, iar a unghiului γ cu un traductor giroscopic montat pe podeaua autovehicului, ambele traductoare fiind conectate la sistemul de măsură şi achiziţie de date, care pune la dispoziţia experimentatorului oscilograme de tipul celei prezentate în figura 6.9. Liniile neutre ale curbelor unghiurilor se trasează la prelucrarea oscilogramei în aşa fel încât suma suprafeţelor superioare să fie egală cu suma suprafeţelor
Fig. 6.8. Forma şi dimensiunile de gabarit ale
obstacolelor.
Fig. 6.9. Oscilograma unghiului γ şi α, în timpul deplasării
rectilinii a autovehiculului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
198
inferioare. Linia a corespunde poziţiei neutre a volanului, iar b mişcării autovehicului exact pe direcţia sectorului de măsurare.
Pentru fiecare parcurgere a sectorului de măsurare valorile medii corespunzătoare unghiurilor α şi γ şi valoarea medie a frecvenţei schimbării sensului de rotaţie a volanului se calculează cu relaţiile:
lmS ααα ='
0 ( 6.3)
lmS γχγ ='
0 ( 6.4)
tlmp
2=ν ( 6.5)
în care: mα, mγ, mt reprezintă scările de înregistrare pe oscilogramă a unghiurilor α şi γ şi respectiv a timpului; p – numărul de vârfuri ale curbei α=f(t) diferenţiate între ele prin mai mult de 3°; l – lungimea de oscilogramă prelucrată, corespunzătoare vectorului de măsurare. Parametrii α0’, γ0’ şi ν se pot obţine direct prin utilizarea unei aparaturi speciale de integrare.
După obţinerea acestor valori, se calculează pentru fiecare tip de sector şi fiecare viteză de încercare, valorile medii ale acestor parametri (α0,γ0,ν) ca media aritmetică a datelor diferitelor parcurgeri ale sectoarelor de drum.
Aprecierea maniabilităţii autovehicului la mersul rectiliniu se face cu ajutorul vitezei
medii de deviere laterală a autovehicului (−
rV ), dată de relaţia:
0γamr VV =−
( 6.6) în care: Vam reprezintă viteza medie de deplasare a autovehicului pe sectorul de drum considerat, γ0 - unghiul mediu de deviere laterală a autovehicului de la traiectoria rectilinie.
6.1.6 Determinarea maniabilităţii la trecerea de pe o bandă pe alta a drumului şi la intrarea în curbă
Trecerea autovehicului de pe o bandă de circulaţie pe alta se face la manevra de
depăşire, la pregătirea şi la ocolirea bruscă a unor obstacole apărute instantaneu pe traiectoria de deplasare. Acest aspect al maniabilităţii prezintă o influenţă deosebită asupra securităţii circulaţiei. Încercările au un caracter comparativ, se efectuează pe un sector de drum lat de cel puţin 10 m, cu o lungime de cel puţin 500 m, marcat conform figurii 6.10, având următoarele tipuri de învelişuri: beton sau asfalt cu suprafaţa netedă şi curată, asfalt cu suprafaţa uniform umedă, zăpadă bătătorită. Înclinarea transversală a drumului să nu depăşească 0,5°, iar cea longitudinală 1°. Suprafaţa drumului este delimitată de două benzi de circulaţie cu lăţimea de 3,5 m fiecare, având acostament lateral dus de minimum 2 m pe ambele părţi.
Prin încercări succesive, conducătorul auto, stabileşte mai întâi curbă limită pe care autovehiculul o poate realiza cu o viteza dată de trecerea de pe o bandă de circulaţie pe alta fără răsturnare sau derapare sau se stabileşte viteza limită pentru o curbă dată în

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
199
aceleaşi condiţii (fără răsturnare sau derapare). Toate încercările comparative se efectuează cu aceleaşi viteze de deplasare, stabilite funcţie de tipul autovehiculului şi starea drumului. Maniabilitatea autovehiculelor se verifică pentru două valori ale vitezei de deplasare, cu o diferenţă între ele de cel puţin 10 km/h (50 km/h respectiv 60 km/h), executând 8 ... 10 parcursuri pentru fiecare din cele două viteze. Parametrul de apreciere a maniabilităţii în acest caz, se consideră cea mai mare viteză cu care se efectuează toate aceste probe. Cu ajutorul aparaturii de măsura şi a unor traductoare montate pe autovehicul, se înregistrează variaţia unghiului de abatere a volanului (α) de la poziţia neutră şi a autovehicului de la direcţia rectilinie iniţială, variaţia prezentată în figura 6.11.
Pe baza înregistrărilor reprezentate grafic în figura 6.11 se determină mărimile
comparative de apreciere a maniabilităţii autovehicului la virarea bruscă şi anume: timpul de intrare în viraj (t’), timpul total de ocolire de la începerea rotirii volanului până
Fig. 6.10. Marcarea sectorul de încercare pentru efectuarea manevrei de trecere de pe o bandă pe alta
a drumului.
Fig. 6.11. Variaţia unghiurilor de rotire α şi γ în timpul efectuării manevrei de trecere de pe o bandă
pe alta a drumului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
200
când amplitudinea oscilaţiei longitudinale (γmin≤1,5°), amplitudinea maxima a axei longitudinale a autovehicului (γmax). Se poate face o prelucrare statistică a oscilogramelor obţinute, calculând unghiul total de rotire al volanului şi valoarea medie a vitezei unghiulare de rotire a axei longitudinale a autovehicului, care se confruntă cu aprecieri subiective ale conducătorului auto experimentator.
Marcarea drumului la efectuarea manevrei de intrare şi ieşire din curbă este prezentat în figura 6.12.
Acest traseu folosit la verificarea maniabilităţii la intrarea în curbă, are drept scop determinarea vitezei cu care se poate deplasa autovehiculul menţinându-şi capacitatea de virare, la intrarea în curbă cu raze constante, pe drumuri cu coeficient de aderenţă mare. Viteza limită se consideră viteza la care autovehiculul îşi pierde maniabilitatea prin răsturnare sau neînscriere pe traiectoria de mers dorită. Experienţele se execută pe o platformă circulară cu raza până la 120 m, acoperită cu beton sau asfalt, fără înclinare, având suprafaţa netedă, uscată şi curată, cu o rază de întoarcere de 25 m pentru autocamioane şi autobuze cu număr
de locuri mai mare de 10 şi de 35 m pentru autoturisme şi autobuze de capacitate mică. Cordonul de intrare în curbă se recomandă să aibă o lăţime de cel puţin 3 m.
Preîntâmpinarea răsturnării autovehicului, pe latura exterioară curbei se realizează prin fixarea unui dispozitiv de rezemare cu una sau două roţi de siguranţă suspendate, care vin în contact cu suprafaţa de rulare în momentul când roţile autovehiculului din interiorul curbei se desprind de sol, moment marcat cu ajutorul unui contact electric.
Înclinarea limită a caroseriei autovehicului la intrarea în curbă se recomandă să nu fie mai mare de 25 ... 30°, după care intră în funcţiune dispozitivul de rezemare.
În timpul încercărilor conducătorul auto, în mod progresiv, de la experienţă la experienţă, măreşte viteza de deplasare a autovehicului cu 1 ... 2 km/h până la limita la care se produce pierderea maniabilităţii şi după aceea efectuează 5 ... 6 parcursuri cu această viteză limită.
Aprecierea maniabilităţii autovehiculelor la intrarea în curbă se face prin valoarea medie a vitezei limită atinsă în cele 5 ... 6 parcursuri înregistrate.
6.1.7 Determinarea maniabilităţii la deplasarea autovehiculului pe o traiectorie în formă de “S”
Această încercare este folosită pentru aprecierea maniabilităţii autovehicului la deplasarea curbilinie cu regim de viteză stabilizat, dar cu unghiuri de bracare variabile.
Fig. 6.12. Marcarea sectorului de încercare pentru efectuarea manevrei de întrare şi ieşire din curbă.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
201
În acest caz, autovehiculul se încarcă pe un coridor de formă “S”, cu două curbe dispuse la 90° spre stânga şi spre dreapta prezentat în figura 6.13.
Delimitarea acestui coridor se face cu ajutorul unor jaloane dispuse la 5 m unul de altul, lăţimea coridorului A şi distanţa dintre axele celor două direcţii paralele la intrare şi ieşire H se aleg în funcţie de parametrii autovehicului, respectiv:
AHBLA 3 şi )(2 =+= ( 6.7) în care: L este ampatamentul autovehicului, B - ecartamentul autovehicului.
Aparatura de încercare instalată pe autovehicul trebuie să permită înregistrarea următorilor parametrii: timpul, viteza de deplasare, spaţiul, unghiul de rotire şi cuplul la volan, vitezele unghiulare şi acceleraţiile liniare după cele trei axe ale autovehiculului. Încercările se recomandă să se execute cu viteze de 10, 20 şi 30 km/h.
Parametrii de apreciere ai maniabilităţii în acest caz sunt: capacitatea de virare dinamică, reacţia autovehiculului la bracarea roţilor şi unghiul dintre vectorul vitezei punctului din mijlocul punţii din
spate şi axa longitudinală a autovehiculului. Conform figurii 6.14 se poate
scrie maniabilitate dinamică sub forma:
2212
2
sincos)( δδδθθδ
+−=tg
tgRR
( 6.8) în care: R2δ şi R2 sunt razele instantanee ale virajului punctului din mijlocul punţii din spate cu şi, respectiv, fără devierea laterală a roţilor de direcţie; δ1 şi δ2 - unghiurile de deviere laterală a punţilor din faţă şi din spate; θ - unghiul de bracare a roţilor.
Capacitatea de virare dinamică se determină cu ajutorul valorilor medii ale raportului R2δ/R2 pentru timpul parcurgerii întregii traiectorii în
formă de “S”.
Fig. 6.13. Marcarea sectorului de încercare pentru
efectuarea deplasării pe o traiectorie în formă de “S”.
Fig. 6.14. Schema cinematică a efectuării virajului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
202
Întârzierea reacţiei autovehicului la bracarea roţilor de direcţie se determină cu ajutorul diferenţei valorilor medii ale raportului R2δ/R2 la intrarea şi ieşirea din curbă, valori care se determină începând cu unghiul de bracare de 5° şi apoi mai mari.
Unghiurile dintre vectorul vitezei centrului punţii din spate şi axa longitudinală a autovehicului se determină cu ajutorul valorii medii a unghiurilor maxime de deviere la puntea din spate δ2max din toată seria de încercări.
Maniabilitatea autovehicului este cu atât mai bună cu cât valoarea medie a raportului R2δ/R2 este mai apropiată de unu, cu cât este mai mică diferenţa dintre valorile R2δ/R2 la intrarea şi ieşirea din curbă şi cu cât este mai mic unghiul δ2max.
6.1.8 Determinarea capacităţii de virare dinamică a autovehiculului
Pentru a determina capacitatea de virare dinamică a autovehicului este necesar ca acesta să se deplaseze pe o traiectorie sinusoidală (în slalom) marcată cu 8 ... 10 jaloane dispuse colinar pe axa drumului, la distanţă S unul de altul. Distanţa S trebuie să fie egală cu: 10 m, la autovehiculele cu ampatamentul sub 2,7 m; 15 m la autovehiculele cu ampatamentul de 2,7 ... 3,5 m; 20 m, la autovehiculele cu ampatamentul peste 4,2 m, figura 6.15.
Autovehiculul se echipează cu aparatura necesară înregistrării concomitente a rotirii
volanului şi a rotirii axei longitudinale a autovehicului în raport cu axa drumului în funcţie de timp.
În timpul experienţelor, autovehiculul se conduce printre jaloane, la o distanţă cât mai mică posibil cu viteza constantă care se schimbă de la cea mai mare posibilă până la cea mai mică (8 ... 10 km/h), la intervale de 2 ... 3 km/h, iar volanul se roteşte lin şi continuu, fără opriri mai mari de 0,2 s sau smucituri în sensul opus faţă de rotaţia necesară. Sectorul de măsurare se parcurge de 3 ... 5 ori, cu intrare atât pe stânga cât şi pe dreapta şi în ambele sensuri, timp în care se înregistrează unghiurile de rotire ale volanului şi a axei longitudinale a autovehiculului în raport cu axa drumului, precum şi timpul.
Fig. 6.15. Marcarea drumului la efectuarea deplasării pe traiectorie în slalom.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
203
Capacitatea de virare dinamică este caracterizată de următorii parametrii: diferenţa dintre unghiurile de deviere la puntea faţă şi din spate: viteza maximă de rotire a volanului în timpul parcurgerii sinusoidei, diferenţa dintre valoarea reală şi cea teoretică necesară unghiului de rotire a volanului pe o porţiune de drum cuprinsă între patru jaloane consecutive. Ca parametru ajutător se foloseşte diferenţa dintre unghiurile de deviere ale punţilor, în momentul atingerii valorii maxime a unghiului de rotire a volanului. Toţi aceşti parametrii se prezintă sub forma unor funcţii de acceleraţie unghiulară maximă la deplasarea pe sinusoidă.
Aprecierea calităţilor de virare dinamice se face pe baza întârzierii rotirii autovehicului în raport cu rotirea volanului, exprimată prin diferenţa unghiurilor de deviere ale punţilor din faţă şi din spate ale autovehicului la acceleraţia maximă a acestuia, în timpul mişcării pe traiectoria sinusoidală, iar aprecierea modului de lucru al conducătorului auto se face prin viteza maximă de rotire a volanului în timpul parcurgerii traiectoriei sinusoidale şi diferenţa dintre numărul de rotiri teoretic necesare ale volanului pe sectorul de măsurare şi numărul de rotiri realizat practic.
Traiectoria pe care se deplasează autovehiculul în acest caz, chiar dacă nu reproduce o situaţie reală de exploatare, datorită modului de desfăşurare (deplasare în slalom), conduce apariţia unor forţe şi acceleraţii laterale rapid variabile ca valoare şi sens şi a unor manevrări continue a direcţiei, fiind un test util atât pentru studiul maniabilităţii cât şi pentru stabilitate.
6.1.9 Determinarea capacităţii de virare statică a autovehiculului
Pentru determinarea capacităţii de virare statică a autovehiculului care reprezintă de fapt capacitatea de a se opune derapării determinate de acţiunea forţei centrifuge la deplasarea pe o traiectorie circulară. Aprecierea capacităţii de virare statică se face cu ajutorul variaţiei diferenţei Δδst dintre unghiurile de deviere la puntea din spate δ1 şi la puntea din spate δ2, funcţie de acceleraţia centrifugă ac, la mişcarea uniformă pe cerc a autovehiculului, cu volanul blocat, dată de relaţia:
)(21 cst af=−=Δ δδδ ( 6.9) sau cu ajutorul dependenţei dintre rezerva stabilităţii statice W şi acceleraţia centrifugă ac, adică:
)(%100..c
gc afLl
W == ( 6.10)
în care: lc.g. este distanţa de la centrul de masă al autovehiculului până la linia neutră de întoarcere, situată la înălţimea centrului de masă, L – ampatamentul autovehiculului. Încercările trebuie efectuate pe o platformă betonată sau asfaltată, orizontală, netedă şi uscată, pe un traseu având forma şi dimensiunile prezentate în figura 6.16.
Aparatura utilizată trebuie să asigure înregistrarea neîntreruptă a unghiului de deviere la puntea din spate a spaţiului h’ timpului parcurs de un punct oarecare al autovehiculului, sau a unghiului de deviere de la ambele punţi şi acceleraţie centrifugă.
În timpul încercărilor autovehiculul se deplasează pe cerc, cu o viteză constantă având o creştere succesivă de viteză după fiecare tură, începând cu viteza minimă

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
204
stabilită (3 ... 4 km/h) până la viteza limită obţinută din condiţia de securitate, menţinând valoarea acesteia constantă pe întreg parcursul lungimii unui cerc.
Cunoscând datele constructive ale autovehiculului, raza de viraj la mişcarea cu viteză minimă, fără deviere, unghiul de deviere a punţii din spate δ2 la diferite viteze şi calculând pe baza datelor înregistrate, razele de viraj corespunzătoare diferitelor viteze de încercare (cu existenţa devierii), se poate determina unghiul de deviere δ1, şi acceleraţia centrifugă ac. Cu ajutorul acestor date se trasează un grafic conform relaţiei 6.9. Un asemenea grafic pentru un autovehicul oarecare este prezentat în figura 6.17.
6.2 Determinarea parametrilor stabilităţii autovehiculului
În anumite condiţii deplasarea autovehiculelor pe roţi poate deveni instabilă, situaţie în care conducerea pe direcţia dorită poate să fie foarte dificilă sau chiar imposibilă. Pierderea stabilităţii apare ca rezultat al caracteristicii forţelor care acţionează asupra autovehiculelor şi anume: forţa de tracţiune, forţa de frânare, forţele laterale care apar la deplasarea în viraj, vânt puternic, vânt lateral puternic, forţe de inerţie determinate de oscilaţiile autovehiculului şi dezechilibrările organelor componente, al calităţii drumului (denivelări, neregularităţi, înclinare longitudinală şi transversală).
Fig. 6.16. Marcarea drumului la efectuarea deplasării pe
traiectorie circulară.
Fig. 6.17. Caracteristica de virare statică a autovehiculelor.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
205
Stabilitatea autovehiculului este proprietatea acestuia de a se opune alunecării, patinării, derapării şi răsturnării
În funcţie de direcţia de mişcare în raport cu axa longitudinală de simetrie a autovehiculului putem vorbi despre stabilitatea longitudinală şi stabilitatea transversală.
6.2.1 Determinarea stabilităţii longitudinale
Pierderea stabilităţii longitudinale a autovehiculului la urcarea rampelor sau coborârea pantelor mari, în timpul demarajului şi frânării, prin patinarea, sau alunecarea longitudinală, sau prin răsturnare. La autovehiculele obişnuite rampa maximă este limitată de forţa de tracţiune şi de aderenţa cu solul la valori la care este exclus pericolul răsturnării longitudinale şi de aceea această verificare are sens numai la autovehiculele speciale, cu capacitate de trecere mare, la care răsturnarea longitudinală nu este precedată de alunecarea longitudinală, lucru care apare atunci când ghb /≤ϕ (în raport cu puntea din spate la urcare) şi gha /≤ϕ (în raport cu puntea din faţă la coborâre), unde ϕ este coeficientul de aderenţă, a şi b – coordonatele longitudinale ale centrului de masă, hg – înălţimea centrului de masă al autovehiculului.
Încercările pentru determinarea stabilităţii longitudinale pentru autovehiculele care se pretează au drept scop determinarea unghiului rampei sau pantei maximale de la care poate începe răsturnarea autovehiculului pe un drum cu aderenţă cunoscută. Testele se efectuează pe poligoane speciale prevăzute cu rampe având înclinări diferite şi paliere intercalate, suficient de lungi pentru a obţine viteza de încercare dorită. Din motive de siguranţă, în faţa autovehiculului de încercat se deplasează cu aceeaşi viteză, pe palierul orizontal, un autovehicul cu greutate şi forţă de tracţiune mai mari, legat de primul printr-un cablu. Mişcarea autovehiculelor se coordonează prin radio, astfel încât cablul de siguranţă să rămână uşor întins fără a fi însă tensionat. Încercările se efectuează la diferite viteze pe rampe din ce în ce mai mari până când roţile din faţă ale autovehicului de încercat încep să se desprindă de sol, unghiul rampei la care începe desprinderea roţilor de sol se numeşte unghi de stabilitate longitudinală la răsturnare. Aceste încercări sunt de obicei precedate de o testare în condiţii de laborator cu autovehiculul pe o platformă basculantă prevăzută într-o parte cu un dispozitiv special de ridicare. Unghiul limită găsit la această testare va fi folosit la alegerea rampei în vederea încercării pe parcurs. Încercările pe poligon, se efectuează uniform, având în vedere că accelerarea autovehiculului pe rampă reduce stabilitatea, iar încetinirea mişcării măreşte stabilitatea lui aparentă.
6.2.2 Determinarea stabilităţii transversale
Pierderea stabilităţii transversale a autovehiculului se poate produce fie prin deraparea autovehiculului, fie prin răsturnarea transversală în jurul liniei ce uneşte punctele de contact ale roţilor de pe aceeaşi parte, sub acţiunea forţelor centrifuge ce apar la deplasarea în viraj sau sub acţiunea componentei paralele cu drumul a greutăţii autovehiculului, la deplasarea lui pe un drum cu înclinare transversală. Atunci când înclinarea transversală a drumului este mare, răsturnarea sau deraparea poate avea loc

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
206
şi la deplasarea rectilinie a autovehiculului. De asemenea, forţa datorită unui vânt puternic, atunci când este îndreptată spre exteriorul virajului, care are acelaşi sens cu forţa centrifugă, poate provoca deraparea sau răsturnarea autovehiculului. La viraje ponderea stabilităţii este în mare măsură atenuată de rotirile bruşte ale volanului de direcţie. Aprecierea stabilităţii transversale se poate face fie pe baza unor parametrii constructivi, fie prin determinarea directă a stabilităţii pe parcurs în diferite condiţii de deplasare. În primul caz, pentru aprecierea stabilităţii transversale, se determină în laborator sau pe parcurs: înclinarea transversală a caroseriei şi unghiul limită de răsturnare, poziţia axei de ruliu a caroseriei şi rigiditatea transversală a suspensiei.
Unghiul limită de înclinare transversală a drumului βr la care începe răsturnarea autovehiculului este dat de relaţia:
gr h
Btg2
=β ( 6.11)
iar unghiul limită de înclinare transversală a drumului la care începe deraparea βd a autovehiculului este:
ϕβ =dtg ( 6.12) Deci, condiţia ca răsturnarea transversală să fie precedată de derapare (fenomen
mai puţin periculos) este:
ghB
2≤ϕ ( 6.13)
unde: B este ecartamentul roţilor autovehiculului, hg – înălţimea centrului de masă, ϕ –coeficientul de aderenţă.
Determinarea analitică a unghiului de stabilitate transversală βr este destul de dificilă, deoarece asupra acestuia acţionează în plus rigiditatea unghiulară a cadrului, respectiv caroseriei autovehiculului, deformaţiile arcurilor şi pneurilor, prin care se micşorează valoarea unghiului stabilităţii transversale. De aceea unghiurile stabilităţii statice transversale a autovehiculului se recomandă să fie determinate în condiţii de laborator pe stand care are o platformă cu posibilitatea înclinării în plan transversal de felul celei prezentate în figura 6.18.
Pe platforma 1 se aşează autovehiculul care se asigură împotriva alunecării cu opritoarele 2 şi 3 fixate în dreptul roţilor, iar cu dispozitivul hidraulic de ridicare 4 se înclină platforma cu unghiul dorit. Unghiul de înclinare laterală a caroseriei ψ se
Fig. 6.18. Platformă pentru determinarea unghiului de înclinare transversală a caroseriei.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
207
determină în funcţie de unghiul de înclinare al platformei de aşezare a autovehiculului cu relaţia:
αβψ −= ( 6.14) (8.12)
în care β este unghiul de înclinare a caroserie faţă de planul orizontal. Înclinând treptat platforma de aşezare a autovehiculului se determină curba de
)(αψ f= şi unghiul limită de răsturnare al autovehiculului αr care corespunde momentului desprinderii de suprafaţa de sprijin al roţilor descărcate (Z=O), unghi care se defineşte ca unghi de stabilitate transversală statică.
Pe platformă se montează traductoare electromagnetice care se află sub roţile autovehicului încercat, traductoare care în momentul desprinderii roţilor de platformă, deconectează sistemul hidraulic de înclinare şi prin aceasta, automat opreşte platforma în momentul în care a fost atins unghiul static de stabilitate transversală. Pentru ca la înclinarea limită să nu se producă răsturnarea autovehiculului, acesta se asigură printr-un cablu de siguranţă 5 prins de un perete din partea opusă tendinţei de răsturnare. Dispozitivul hidraulic dispune de supape electromagnetice, care blochează un sistem de siguranţă, concomitent cu oprirea înclinării platformei.
Stabilitatea transversală este influenţată de mişcarea pe plan transversal a maselor suspendate faţă de cele nesuspendate, mişcare caracterizată de poziţia axei de raliu a caroseriei şi rigiditatea suspensiei.
Determinarea stabilităţii transversale pe parcurs permite aprecierea directă a acesteia privind tendinţa autovehiculului de a derapa sau a se răsturna în diferite condiţii de deplasare. Încercarea se efectuează în timpul virajelor şi în timpul deplasării pe drumuri cu înclinare transversală cunoscută.
În primul caz rezultatele se obţin la determinarea maniabilităţii la intrarea în curbă (vezi subcapitolul 6.1.6)
Stabilitatea autovehiculelor la deplasarea pe drumuri cu înclinare transversală necesită amenajarea unor piste speciale, pe care autovehiculul se deplasează cu viteza de circa 5 km/h pe drum cu suprafaţă netedă, dură şi cu aderenţă cât mai bună, având înclinarea transversală din ce în ce mai mare.
Unghiul de înclinare a drumului în locul unde, datorită înclinării apare tendinţa de răsturnare a autovehiculului se numeşte unghi de stabilitate transversală în timpul deplasării. Pentru ca, în momentul pierderii stabilităţii autovehiculului de încercat să nu se răstoarne, se leagă de partea superioară a caroseriei cu un cablu ancorat la celălalt capăt de un autovehicul greu şi cu stabilitate mare, care se deplasează cu aceeaşi viteză pe un drum amplasat în partea superioară drumului cu înclinare transversală.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
208
7 DETERMINAREA PE CALE EXPERIMENTALĂ A FIABILITĂŢII AUTOVEHICULELOR
7.1 Estimarea pe cale experimentală a indicatorilor de fiabilitate
Măsura cu ajutorul căreia se exprimă cantitativ fiabilitatea sau una din caracteristicile ei, poartă denumirea de indicator de fiabilitate. Există foarte mulţi indicatori de fiabilitate, dar fiecare estimează doar una din caracteristicile fiabilităţii.
7.1.1 Determinarea valorilor teoretice ale indicatorilor de fiabilitate Indicatorii de fiabilitate permit efectuarea calculelor de fiabilitate, compararea
fiabilităţii diferitelor ansamble, analiza diverşilor factori asupra fiabilităţii, fundamentarea cerinţelor de fiabilitate impuse produselor, fundamentarea necesarului de piese de schimb şi a organizării reparaţiilor necesare bunei funcţionări a diferitelor sisteme.
Estimarea valorilor indicatorilor se face prin: metode neparametrice, aplicarea cărora nu necesită identificarea legii de repartiţie a
timpului de funcţionare; metode parametrice, care presupun identificarea prealabilă a legii de repartiţie a
timpului de funcţionare. Fiabilitatea unui sistem depinde de cea a elementelor componente, lucru care
impune analiza indicatorilor de fiabilitate ai elementelor şi abia apoi cea a sistemelor. Prin urmare, analiza sistemelor presupune, în primul rând cunoaşterea indicatorilor de fiabilitate ai elementelor, indicatori care se împart în două categorii:
indicatori de fiabilitate ai elementelor nereparabile; indicatori de fiabilitate ai elementelor reparabile.
Valorile teoretice ale indicatorilor de fiabilitate, se pot determina considerând totalitatea elementelor mulţimii respective, valori care se mai numesc valori adevărate sau valori în populaţie.
Relaţiile de calcul pentru valorile teoretice ale indicatorilor de fiabilitate sunt prezentate în tabelul 7.1 care se referă la timpul de funcţionare până la defectare, în cazul produselor reparabile.
Tabelul 7.1
Definiţia şi relaţiile de calcul ale principalilor indicatori de fiabilitate. Nr. crt Indicatorul Simbol Definiţie Valoarea teoretică
0 1 2 3 4 1. Funcţia de
repartiţie a timpului de funcţionare
F(t)
Probabilitatea ca produsul să se defecteze în intervalul de timp (0, t): F(t)=P(T ≤ t) )0(
)()0()(N
tNNtF −=

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
209
0 1 2 3 4
2. Densitatea de probabilitate a timpului de funcţionare
f(t)
Limita raportului dintre probabilitatea ca produsul să se defecteze în intervalul (t, t+Δt) şi mărimea intervalului când Δt→0
tttTtPtf
t ΔΔ+<<
=∞→Δ
)(lim)(
tNttNtNtttf
Δ⋅Δ+−
=Δ+)0(
)()(),(
3. Funcţia de fiabilitate R(t)
Probabilitatea ca produsul să funcţioneze fără să se defecteze în intervalul de timp de mărimea (0, t) : R(t)=P(T>t) )0(
)()(NtNtR =
4. Intensitatea (rata de defectare)
z(t)
Limita raportului dintre probabilitatea ca produsul să se defecteze în intervalul (t, t+Δt), condiţionată de funcţionarea în intervalul (0, t), şi mărimea intervalului, când Δt→0:
tTttTtPtZ
t Δ>Δ+≤<
=→Δ
)1\(lim)(0
ttNttNtNtttz
Δ⋅Δ+−
=Δ+)(
)()(),(
5. Media timpului de funcţionare m
Valoarea medie a timpului de funcţionare
∫∞
⋅⋅=0
)( dttftm ∑=
=)0(
1)0(1 N
iitN
m
6. Dispersia timpului de funcţionare D
Momentul centrat de ordinul 2 al timpului de funcţionare:
∫∞
⋅⋅−=0
2 )()( dttfmtD
∑=
−=)0(
1
2)()0(
1 N
ii mt
ND
7. Abaterea medie pătratică
σ ∫∞
⋅⋅−==0
2 )()( dttfmtDσ ∑=
−=)0(
1
2)()0(
1 N
ii mt
Nσ
8. Coeficientul de variaţie
ν
Caracterizează gradul de împrăştiere a timpului de funcţionare faţă de valoarea medie
∫
∫∞
∞
⋅⋅
⋅⋅−
==
0
0
2
)(
)()(
dttft
dttfmt
mσυ ∑
∑
=
=
−= )0(
1
)0(
1
2
)0(1
)()0(
1
N
ii
N
ii
tN
mtN
υ
9. Cuantila timpului de funcţionare
tF Timpul în care produsul funcţionează cu o anumită probabilitate (1-F): P(T ≤ tF)
Timpul până la care se defectează F(T)N(T) produse
Observaţii: 1. Indicatorii de la 1,3 şi 9 sunt adimensionali; indicatorii de la 2 şi 4 se exprimă în ore-1, cei de la 5,
7, 48 în ore iar cel de la 6 în ore2. 2. În unele cazuri, în loc de ore, indicatorii de fiabilitate pot fi exprimaţi în kilometri parcurşi, cicluri de
funcţionare, etc. 3. Simbolurile utilizate au următoarele semnificaţii:
N(0) – numărul total de elemente din eşantion; N(t) – numărul de elemente aflate în stare de funcţionare la momentul t;
t – mărimea intervalului de timp; ti – timpul de funcţionare al elementului i = 1,2,…N(0) 4. Pentru f(t) şi z(t) se determină valorile medii în intervalul (t, ti+Δ t).

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
210
7.1.2 Estimarea punctuală a indicatorilor de fiabilitate prin metode neparametrice
Acest mod de estimare se utilizează atunci când nu se cunoaşte modelul statistic
de repartiţie al timpilor de funcţionare a componentelor analizate. În acest caz se supun n produse (sisteme, subsisteme sau elemente) unor încercări de fiabilitate în timp de t ore, care reprezintă durata misiunii care trebuie îndeplinită între două lucrări de mentenanţă preventivă şi pentru care se cere determinarea indicatorilor de fiabilitate. Încercarea se consideră fără înlocuire. Experimentarea poate fi realizată şi la produse reparabile, prin faptul că procesul de reparare nu modifică repartiţia timpilor de defectare a produselor, cât şi atunci când un număr de produse identice funcţionează simultan sau în perioade diferite, dar fiecare produs este încercat pentru aceeaşi durată de funcţionare.
În tabelul 7.2 sunt prezentate relaţiile de calcul pentru estimarea punctuală a valorilor indicatorilor de fiabilitate, valori care nu pot fi extrapolate pentru durate diferite de cele ale observaţiilor, iar estimarea se face distinct, pentru produse reparabile şi nereparabile.
Tabelul 7.2
Relaţiile de calcul pentru estimarea punctuală a indicatorilor de fiabilitate. Valoarea estimată punctual pentru produsele : Nr.
crt Indicatorul Sim- bol nereparabile reparabile
1. Funcţia de repartiţie a timpului de funcţionare
)(ˆ tF 1
;(**)(*)
+nr
nr
qr′
2. Densitatea de probabilitate a timpului de funcţionare
)(ˆ tf tntnΔ⋅Δ )(
-
3. Funcţia de fiabilitate )(ˆ tR
11;
(**)(*)
++−−
nrn
nrn
qrq ′−
4. Intensitatea (rata de defectare) )(ˆ tz
ttNtnΔ⋅
Δ)(
)(
-
5. Media timpului de funcţionare m ∑
=
Σ =n
ii nrt
nrT
1
)(1; ∑=
′p
jjtp 1
1
6. Dispersia timpului de funcţionare D ∑
=
−−
n
ii mt
n 1
2)ˆ(1
1 ∑
=
−′−
p
jj mt
p 1
2)ˆ(1
1
7. Abaterea medie pătratică σ ∑
=
−−
n
ii mt
n 1
2)ˆ(1
1 ∑
=
−′−
p
jj mt
p 1
2)ˆ(1
1
8. Coeficientul de variaţie υ
mτ
mτ
9. Cuantila timpului de funcţionare Ft Timpul până la care se defectează
F(t)n produse Durata fiecăreia din cele q misiuni F(T)q fiind ratate
Observaţii: 1. Simbolurile utilizate au următoarele semnificaţii:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
211
n = N(0) – volumul eşantionului; N(t) – numărul de produse aflate în stare de funcţionare la momentul t; r = n(t) – numărul de defectări observate până la momentul t; Δ t – intervalul de timp ales; n(Δ t) – numărul de defectări în intervalul Δ t; ti – momentul de apariţie al unor defectări; i = 1,2…n; TΣ - durata cumulată de funcţionare a produselor:
trntTr
ii )(
1
−+= ∑=
Σ ;
r – numărul de misiuni în care produsul s-a defectat; q – numărul de misiuni de durată t, iniţiate asupra produsului; p – numărul de încercări efectuate asupra unui produs până la defectarea sa; tj – durata unei încercări, j = 1,2,..p; 2. Relaţiile notate cu (**) sunt valabile dacă ultima defectare coincide cu sfârşitul intervalului de
observare (ti = t), iar cele notate cu (*) sunt valabile în caz contrar (ti ≠ t). 3. Pentru indicatorii f(t) şi z(t) se pot determina numai valorile medii.
Având în vedere că estimarea indicatorilor F(t), f(t), R(t) şi z(t) din tabelul 7.2 este
dependentă de intervale succesive de timp în care se produc defectări la produse nereparabile, gruparea pe intervale a valorilor observate în vederea estimării punctuale a indicatorilor de fiabilitate se face conform tabelului 7.3 .
Tabelul 7.3
Gruparea valorilor observate în vederea estimării punctuale a indicatorilor de fiabilitate.
Nr.
Crt.
Limitele intervalelor
t…Δ t
Numărul de defec-tări pe intervalul n(Δ t)
Numărul de produ-se active la sfârşi-tul intervalului N(t)
Rata de defectare pe inter-valul Z(t)
Densitatea de proba-bilitate a timpului de funcţio-nare f(t)
Funcţia de repartizare a tim-pului de funcţio-nare F(t)
Funcţia de fiabilitate R(t)
În conformitate cu tabelul 7.3 se pot estima punctual numai valorile indicatorilor F(t)
şi R(t), întrucât observaţiile efectuate se vor încheia la sfârşitul intervalului de timp stabilit iniţial, folosind relaţiile:
qrtF′
=)()
( 7.1)
şi
qrqtR′−
=)()
. ( 7.2)
în care r′ este numărul de misiuni din cele iniţiale în care produsul s-a defectat; q - numărul de misiuni de durată t, iniţiate asupra produsului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
212
7.1.3 Estimarea valorilor indicatorilor de fiabilitate prin metode parametrice
Pentru a folosi aceste metode, este necesar să se cunoască modelul statistic adecvat studiului fiabilităţii unui anumit produs. Fiabilitate prin model statistic se înţelege repartiţia statistică care descrie comportarea în timpul funcţionării până la defectare. Repartiţiile statistice sunt definite pe intervalul (0, ∞), timpul fiind o mărime pozitivă (t>0).
La studiul metodelor statistice, trebuie luate în consideraţie următoarele aspecte: cum se identifică modelul statistic, în cazul în care acesta este necunoscut; cum se estimează parametrii modelului respectiv, în cazul în care acesta este
cunoscut. Estimarea parametrică a indicatorilor
de fiabilitate, după ce a fost identificat modelul statistic adecvat, se poate face prin metode grafice sau analitice. În primul caz se utilizează metoda reţelelor de probabilitate, care sunt grafice realizate pe o reţea gradată rezultată prin simpla sau dubla logaritmare (figura 7.1) pe care se prezintă punctele: ti , reprezentând valorile din eşantionul de volum n ordonat crescător şi Fn(ti) care reprezintă valorile funcţiei empirice de repartiţie.
Estimatorul Fn(ti) = r/n, adecvat pentru testul Kolgomorov – Smirnov, este convenabil atunci când se utilizează reţele de probabilitate doar pentru eşantioane foarte mari, care în practică se obţin rar.
Estimatorul Gunar Blam, este un estimator punctual, general al funcţiei de
repartiţie care are forma:
1)(
+−+−
=ii
iin n
rtF
βαα
( 7.3)
în care iα şi iβ sunt aleşi în funcţie de particularităţile repartiţiei adoptate.
Diferiţi cercetători particularizând relaţia 7.3, deduc afirmaţiile funcţiei de repartiţie după cum urmează:
Estimaţia de tip Hansen ( iα =1/2 şi iβ =3/2), sub forma:
1)(
+−+−
=ii
iin n
rtF
βαα
( 7.4)
Fig. 7.1. Utilizarea reţelei de probabilitate în vederea validării metodelor experimentale.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
213
Estimaţia de tip Weibull, ( iα = iβ = 0), sub forma :
1)(
+=nrtF in ( 7.5)
Estimaţia de tip Kao, ( iα = iβ = 1), sub forma:
11)(
+−
=nrtF in ( 7.6)
Estimaţia de tip Johnson, sub forma:
4.03.0)(
+−
=nrtF in ( 7.7)
(10.6) Estimaţia de tip Belam, apreciată ca fiind cel mai bun estimator punctual pentru
repartiţia normală , N(t, m, σ), sub forma:
25.037.0)(
+−
=nrtF in ( 7.8)
La aplicarea metodei grafice, principala problemă este constituirea unei dependenţe liniare între punctele coordonatelor ti şi Fn(ti) prin faptul că punctele considerate nu se vor situa pe dreapta teoretică, deoarece în practică nu se lucrează cu valori teoretice pentru t şi Fn(t).
Metoda grafică, folosind reţele de probabilitate, poate evidenţia provenienţa unor date rezultate prin amestecul a două loturi de produse cu caracteristici diferite.
Modelele tratate prin metoda grafică aplicate frecvent la ora actuală sunt: modelul de repartiţie exponenţială şi modelul de repartiţie Weibull.
Estimarea valorilor indicatorilor de fiabilitate prin modelul repartiţiei exponenţiale
În tabelul 10.4 sunt redaţi principalii indicatori de fiabilitate, cu relaţiile de calcul şi cu reprezentarea grafică a unora dintre ei.
Tabelul 7.4
Principalii indicatori de fiabilitate în cazul repartiţiei exponenţiale. Nr. crt Indicatorul Simbol Expresia analitică Reprezentarea grafică
0 1 2 3 4 1. Funcţia de
repartiţie a timpului de funcţionare
F(t) te λ−−1
2. Densitatea de
probabilitate a timpului de funcţionare
f(t) te λλ −⋅
3. Funcţia de
fiabilitate R(t) te λ−

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
214
0 1 2 3 4 4. Intensitatea
(rata de defectare)
z(t) λ sau
θ1
⎟⎠⎞
⎜⎝⎛ =
ϑλ 1
5. Media timpului de funcţionare
m
λ1
sau θ
6. Dispersia timpului de funcţionare
D 2
1λ
sau 2θ
7. Abaterea medie pătratică
σ
λ1
sau θ
8. Coeficientul de variaţie
ν 1=
θσ
Construcţia reţelei de probabilitate se poate realiza pornind de la relaţia funcţiei de
repartiţie a timpului de funcţionare, din tabelul 7.4, sunt de forma: tetF λ−=1)( ( 7.9)
care poate fi scrisă şi sub forma:
)(1
1tF
e t
−=λ ( 7.10)
Prin logaritmare, relaţia 7.10 devine:
ttF
λ=− )(1
1ln ( 7.11)
Expresia )(1
1lntF−
se ia egală cu Y, iar valorile scării pentru axa ordonatei funcţie de
repartiţia timpului de funcţionare se obţine cu relaţia:
YetF 11)( −= ( 7.12)
Adoptând diferite valori pentru Y se pot obţine valorile care vor fi trecute pe axa ordonatelor, la o scară logaritmică simplă, iar relaţia Y=λt, pe reţeaua de probabilitate respectivă, reprezintă dreapta funcţiei de repartiţie empirică a timpului de funcţionare prezentată în figura 7.2.
În figura 7.2 sunt reprezentate punctele rezultate din setul de valori (ti, Fn(ti))pentru 1<i<n înscrise pe cele două axe de coordonate ale reţelei de probabilitate. Prin setul de puncte înscrise pe reţeaua de probabilitate se va trasa dreapta care va aproxima cel mai probabil funcţia empirică de repartiţie corespunzătoare eşantionului de date experimentale avute la dispoziţie.
Dacă se va admite substituţia:
m1
=λ ( 7.13)
funcţia de fiabilitate va avea forma:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
215
metFtR1
)(1)(−
=−= ( 7.14) Dacă mt )= , se obţine:
368.0)( 1 === −eetR mm)
( 7.15) sau:
%8.36)( =tR ( 7.16) de unde:
632.0368.01)(1)( =−=−= tRtF)
( 7.17) sau:
%2.63)( =tF ( 7.18) Dacă pe ordonata reţelei de
probabilitate se ia valoarea F(t) şi se trasează o dreaptă paralelă la abscisă, până ce intersectează dreapta ce reprezintă funcţia empirică, se obţine un punct al cărui abscisă reprezintă chiar valoarea estimată a
mediei timpului de funcţionare m. În această situaţie, se poate obţine valoarea estimată a parametrului λ, cunoscând
valoarea estimată a parametrului m, deci:
m)) 1=λ ( 7.19)
Dispunând de aceste date se pot estima valorile tuturor indicatorilor de fiabilitate, specifici repartiţiei exponenţiale.
Estimarea valorilor indicatorilor de fiabilitate prin modelul Weibull Indicatorii de fiabilitate specifici modelului de repartiţie Weibull precum şi
prezentarea grafică a celor care au variaţia în funcţie de timpul de funcţionare, sunt prezentaţi în tabelul 7.5.
Tabelul 7.5
Principalii indicatori de fiabilitate în cazul repartiţiei Weibull. Nr. crt Indicatorul Simbol Expresia analitică Reprezentarea grafică
0 1 2 3 4 1. Funcţia de
repartiţie a timpului de funcţionare
F(t) β
ηγ⎟⎟⎠
⎞⎜⎜⎝
⎛ −−
−1
1 e
Fig. 7.2. Reţeaua de probabilitate în cazul
repartiţiei exponenţiale.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
216
0 1 2 3 4
2. Densitatea de probabilitate a timpului de funcţionare
f(t) β
ηγβ
ηγ
ηβ ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−
−
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛ −⋅
11
et
3. Funcţia de
fiabilitate R(t) β
ηγ⎟⎟⎠
⎞⎜⎜⎝
⎛ −−
1
e
4. Intensitatea
(rata de defectare)
z(t) 1−
⎟⎟⎠
⎞⎜⎜⎝
⎛ −⋅
β
ηγ
ηβ t
5. Media
timpului de funcţionare
m ⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅Γ⋅+ 11
βηγ
6. Dispersia timpului de funcţionare
D ⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅Γ−⎟⎟
⎠
⎞⎜⎜⎝
⎛+⋅Γ 1112 22
ββn
7. Abaterea medie pătratică
σ
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅Γ−⎟⎟
⎠
⎞⎜⎜⎝
⎛+⋅Γ 1112 22
ββn
8. Coeficientul de variaţie
ν
⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅Γ
⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅Γ
11
12
2
β
β
Utilizarea reţelelor de probabilitate de tip Weibull oferă o cale extrem de practică
în prezentarea datelor şi analiza datelor de observaţie în următoarele condiţii: există un număr relativ mic de date observate; fiind vorba de produse în faza de omologare, repartiţia este necunoscută; se realizează prin calcul de tatonare în vederea unei prelucrări ulterioare riguroase
pe calculator; este necesară o testare rapidă a datelor în vederea verificării conformităţii cu
prescripţiile impuse sau în scopul obţinerii rapide a unor viziuni de ansamblu asupra rezultatelor sau de dirijare a programului de experimentare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
217
În urma analizei aplicării modelului de repartiţie Weibull se pot observa următoarele
avantaje: reprezintă o formă analitică simplă; prin existenţa a trei parametri poate descrie fenomene şi procese de complexitate
ridicată; are un corespondent în cazul analizelor de fiabilitate a proceselor de degradare a
produselor; permite elaborarea de metode cu grad ridicat de operativitate.
În comparaţie cu modelul exponenţial, modelul Weibull prezintă următoarele avantaje:
modelul Weibull capătă un plus de fidelitate în descrierea proceselor de degradare a elementelor şi sistemelor tehnice în timpul utilizării în exploatare, prin cei doi parametri suplimentari ce-i conţine faţă de modelul exponenţial;
ratei (intensităţii) de defectare nu-i mai este impusă ipoteza simplificatoare a constantei în timp ca fiind dependentă de timp, fapt ce corespunde într-o măsură mai mare cu desfăşurarea proceselor şi fenomenelor de defectare. Modelul Weibull înglobează în plus modelele exponenţiale ( β = 1), Rayleigh ( β =
2), normal ( β = 3…4) şi altele sub forma unor cazuri particulare evidenţiate prin introducerea parametrului de formă β .
În figura 7.3 este dată o reţea de probabilitate pentru repartiţia Weibull, cunoscută şi sub denumirea de reţeaua Allan Plait, construită prin efectuarea unor duble logaritmări
Fig. 7.3. Reţeaua de probabilitate în cazul repartiţiei Weibull.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
218
asupra funcţiei de repartiţie a timpului de funcţionare, dată în tabelul 7.5, adusă sub forma:
βγ )(
)(11 −=
−te
tF ( 7.20)
care prin logaritmare pentru γ = 0, capătă următoarea formă:
ηββ lnln)(1
1lnln −=−
ttF
( 7.21)
Stabilirea unor relaţii de tip liniar între termenii )(1
1lnlntF−
şi tln permite
construirea reţelei de probabilitate. Pe reţeaua de probabilitate (fig. 10.3), se marchează perechile de puncte ti şi Fn(ti),
în care ti reprezintă valorile timpilor de funcţionare ordonaţi crescător (scara absciselor este logaritmică, q alegându-se astfel ca toate punctele să poată fi reprezentate pe reţeaua de probabilitate), iar Fn(ti) funcţie empirică a timpului de funcţionare care se determină cu relaţia:
4.03.0)(
+−
=nrtF in ( 7.22)
Sau:
1nr)(tF in +
= ( 7.23)
în care r=1,2…n este numărul de ordine al defectării. Estimarea parametrilor repartiţiei Weibull pe baza reţelei Allan Plait se poate face
prin mai multe modalităţi, şi anume:
Estimarea parametrului de localizare γ În situaţia în care perechile de puncte ti şi Fn(ti), înscrise pe reţeaua de probabilitate
se aliniază după o dreaptă D, figura 7.3, parametrul de localizare γ este egal cu zero. Dacă punctele nu se aliniază după o dreaptă ci după o curbă C, se pot desprinde următoarele cazuri posibile:
modelul statistic nu este de tip Weibull; modelul statistic este de tip Weibull, însă „mascat” în sensul că trebuie determinat
mai întâi parametrul γ. În cel de al doilea caz pot să apară următoarele două situaţii:
punctele se înscriu după o curbă de felul celei prezentate în figura 7.4, a, iar o asemenea formă se întâlneşte în cazul în care elementul supus observării se află la sfârşitul perioadei de rodaj.
punctele se înscriu după o curbă de felul celei prezentate în figura 7.4, b, formă care se întâlneşte când produsele supuse observării au un oarecare grad de uzura din perioada anterioară sau când o serie de cauze de defectare sunt acumulate în produsul analizat în perioada de proiectare sau de fabricaţie. Estimarea parametrului γ se efectuează prin încercări, scăzând din ti, o mărime
0<a0<ti (fig. 10.3). Se figurează din nou perechile de puncte ti – a0 şi Fn(ti) şi se urmăreşte tendinţa de aliniere după o dreaptă. Dacă nu se manifestă această tendinţă se repetă procedura cu alte valori ale parametrului a0 . După mai multe încercări,

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
219
punctele se dispun după o dreaptă, iar modelul este de tip Weibull cu parametru de localizare γ = a0.
Valoarea parametrului γ se poate determina şi prin interpolare, folosind relaţia:
mn
mn
tttttt21
21
−+−⋅
=γ) ( 7.24)
în care t1 şi tn sunt valorile extreme ale timpului de funcţionare, figura 7.4; tm – abscisa corespunzătoare funcţiei empirice de repartiţie cu valoarea medie.
Estimarea parametrului de scară η Parametrul η se determină pe reţeaua Weibull, figura 7.3, dacă se identifică pe linia
marcată cu η, ce corespunde ordonatei F(t) = 63.2%, punctul A, în care acesta se intersectează cu dreapta D, care aproximează repartiţia experimentală. Acest lucru se bazează pe faptul că dacă se înlocuieşte în expresia de repartiţie a timpului de funcţionare, F(t) valoarea t = η, adică:
632.011)( 1)(
=−=−= −−
eeFβ
ηη
η ( 7.25) sau:
%2.63)( =ηF ( 7.26) Estimarea parametrului de formă β Parametrul de formă β se poate determina dacă din punctul de coordonate 1; 63.2,
figura 7.3, se trasează o paralelă la dreapta D (linia P) care aproximează repartiţia experimentală. Valoarea parametrului β se citeşte în punctul B situat la intersecţia acestei drepte cu axa notată cu β.
7.2 Organizarea cercetărilor experimentale pentru evaluarea indicatorilor de fiabilitate
Este necesar să se realizeze o verificare permanentă a calităţii de exploatare, atât a
autovehiculelor cât şi a principalelor componente ale acestora începând încă din faza de proiectare şi terminând cu perioada de utilizare – exploatare. În fiecare etapă
Fig. 7.4. Cazuri posibile de repartiţie a punctelor pe reţeaua de probabilitate de tip Weibull.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
220
obiectivele încercărilor sunt diferite şi sunt limitate la un control al fiabilităţii specifice momentului desfăşurării acestora.
În etapa de proiectare - cercetare – dezvoltare de produs, este necesar să se verifice dacă soluţiile constructive alese asigură calitatea impusă prin temă, adică se verifică prin încercări gradul de încorporare în fiecare subansamblu al autovehiculului nivelul proiectat cu ajutorul indicatorilor şi caracteristicilor prevăzute în acest scop. În felul acesta se pot aduce încă în această fază o serie de corectări şi îmbunătăţiri produsului în vederea obţinerii unui produs cu înalte calităţi funcţionale pe o durată cât mai îndelungată.
La fabricaţie, încercările prevăzute în faza de asimilare a produsului testează corectitudinea procedeelor tehnologice de fabricaţie preconizate, calitatea şi precizia utilajelor folosite pentru prelucrarea pieselor precum şi eficienţa controlului tehnic de calitate în diverse faze ale procesului de producţie. În a doua fază se urmăreşte prin încercări periodice, stabilitatea întregului proces de realizare a produsului în sensul repetabilităţii indicatorilor şi caracteristicilor de calitate, în orice moment al fabricaţiei.
În etapa de exploatare, încercările de fiabilitate au ca obiectiv principal să stabilească în ce ritm se degradează calităţile de exploatare pe măsura creşterii duratei de utilizare a produselor. De asemenea, se poate aprecia corectitudinea şi oportunitatea unor lucrări de mentenanţă în vederea menţinerii nivelului de calitate realizat în procesul de fabricaţie.
Încercările trebuie să creeze condiţii de evaluare a gradului de degradare al diferitelor componente indiferent de etapa de realizare sau utilizare în care se află componentele autovehiculului. Aceste încercări se fac în scopul asigurării posibilităţilor de stabilire a măsurilor ce trebuie luate pentru îmbunătăţirea nivelului de calitate.
După regimul de încercare la diferite tipuri de încercări (mecanice, termice, electrice, hidraulice, etc), încercările componentelor autovehiculelor pot fi:
încercări în condiţii normale când factorii de solicitare prin metodica de încercare nu depăşesc valorile limită prevăzute prin documentaţia tehnică (caietul de sarcini, norma internă, etc.), atât sub aspectul nivelelor cât şi în privinţa ritmurilor de solicitare;
încercări accelerate când se urmăreşte reducerea duratei prin creşterea nivelurilor de solicitare, care poate să fie la limita de deteriorare a condiţiilor de funcţionare când se urmăreşte conservarea mecanismului şi naturii defectărilor în scopul creării posibilităţii de analiză şi evaluare rapidă a procesului de degradare în funcţie de tipul de încercare. În anumite situaţii nivelele de solicitare pot depăşi limita maximă a degradărilor când încercările se vor desfăşura în regim forţat, urmărind durata totală de funcţionare a unui produs până la distrugerea parţială sau totală, punând în evidenţă rezerva iniţială a calităţii sale. Pentru a mări nivelul certitudinilor în privinţa rezultatelor, sunt supuse încercărilor un
lot sau un eşantion semnificativ de componente, în scopul stabilirii indicatorilor prin prelucrări statistice adecvate. Valorile obţinute în urma încercărilor se vor compara cu cele stabilite prin documentaţia tehnică a produsului. În scopul reducerii timpului de încercare, încercările desfăşurate încetează odată cu defectarea tuturor componentelor dintr-un eşantion sau pot fi întrerupte când experienţa încetează înainte de defectarea tuturor componentelor din eşantion. În funcţie de modul de încheiere a experimentului încercările pot fi organizate în următoarele variante:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
221
încercări trunchiate, care încetează odată cu atingerea unei durate de experimentare precizate;
încercări cenzurate, care încetează odată cu atingerea unui număr precizat de
Fig. 7.4. Clasificarea încercărilor de fiabilitate.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
222
componente defecte din eşantion; încercări cumulate (cenzurate progresiv), pentru care nu s-au stabilit reguli precise
de încheiere, când unele exemplare, în funcţiune, sunt retrase din experimentul desfăşurat. Calitatea şi în special fiabilitatea poate fi estimată în orice moment pe baza duratei cumulate de încercare şi a numărului de componente defectate;
încercări secvenţiale, care încetează în momentul în care numărul de componente defectate constante şi durata cumulată de încercare, permite să se afirme că fiabilitatea este superioară sau inferioară unei valori prestabilite. Locul de desfăşurare a încercărilor de fiabilitate poate să fie în laboratoare speciale,
în poligoane cu posibilitatea simulării condiţiilor de exploatare şi în condiţii de exploatare.
Încercările desfăşurate în laborator, pe standuri specializate pentru componente distincte şi încercările în poligoane special amenajate sau naturale, organizate pentru ansamblul autovehicul, au avantajul principal gradul înalt de reproductivitate în orice situaţie şi posibilitatea controlului permanent al regimului de experimentare prin înregistrarea corectă a tuturor parametrilor funcţionali sau constructivi necesari pentru aprecierea şi evaluarea condiţiilor de defectare. Ca dezavantaj poate fi amintit faptul că în majoritatea cazurilor, mai ales în condiţii de laborator, nu se pot reproduce integral condiţiile reale de funcţionare în exploatare, ceea ce reduce gradul de fidelitate a experimentului faţă de situaţia reală.
Încercările în exploatare permit obţinerea celor mai autentice informaţii despre fiabilitatea produsului, însă este dificilă achiziţionarea corectă a datelor, durează mult şi pot exista diferenţe destul de mari între nivelele reale de solicitare de la un component la altul din eşantionul de experimentare. Accelerarea încercărilor se poate realiza prin organizarea activităţilor de transport în mai multe schimburi.
În timpul experienţelor, mai ales când se desfăşoară în laborator sau în poligon, se impun anumite cerinţe, printre care pot fi amintite: condiţiile de funcţionare cele mai caracteristice din exploatare, condiţiile mediului înconjurător şi condiţiile de timp. Datele necesare pentru a construi diagramele de repartiţie a colectivelor de solicitări trebuie obţinute înaintea elaborării programului de încercări.
7.2.1 Achiziţia datelor primare pentru evaluarea indicatorilor de fiabilitate
Etapa importantă a activităţii de organizare a încercărilor de fiabilitate, o prezintă înregistrarea informaţiilor care trebuie să fie consemnate în fişa de urmărire a defecţiunilor, date care trebuie sa facă referiri la următoarele aspecte ale procesului de defectare a componentului:
identificarea produsului: tipul, seria şi alte elemente pentru identificarea elementului investigat;
date referitoare la utilizarea produsului: data fabricării şi introducerii în exploatare, timpul de funcţionare până la defectare, etc.
date privitoare la defecţiuni: simptome, modul de manifestare, cauza, localizarea în schema generală constructivă a componentului;

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
223
acţiuni întreprinse după defectarea produsului: diagnosticarea şi expertiza defecţiunii, natura şi tipul acţiunilor de mentenanţă, timpul de lucru efectiv, timpul total de imobilizare, costul materialelor şi manoperei.
Prelucrarea datelor primare permite în prima fază elaborarea unor materiale de sinteză şi de sistematizare sub formă de diagrame şi tabele, cu date centralizate pe întregul lot aflat sub urmărire în care pot fi evidenţiate fluxul defecţiunilor pe agregatele de bază ale autovehiculelor sau pentru autovehicule în ansamblu. Histogramele sunt cele mai utilizate reprezentări care pot fi ordonate în ordinea descrescătoare a numărului de defectări (în valori absolute sau relative) sau după principalele cauze de defectare, denumite diagrame tip Pareto.
Din informaţiile prelucrate, se formulează decizii în privinţa separării componentelor critice din ansamblul constructiv, la care vor trebui întreprinse măsuri de îmbunătăţire şi de corectare a nivelului de fiabilitate.
7.2.2 Determinarea modelului repartiţiei teoretice pentru indicatorii de fiabilitate
Rezultatele experimentale obţinute pe baza încercărilor de fiabilitate au un caracter aleatoriu şi necesită o prelucrare statistică. Deci, problema determinării unui anume model statistic constă în verificarea concordanţei între repartiţia empirică a duratei de funcţionare şi a repartiţiei teoretică, presupusă adevărată.
Pentru ca metodele statistico-matematice de prelucrare a datelor să aibă valabilitate, trebuie ca datele sa satisfacă următoarele condiţii de ordin general:
să fie autentice; să fie reprezentative din punct de vedere statistic; să fie omogene din punct de vedere statistic; să aparţină unei legi de repartiţie corespunzătoare naturii procesului cercetat.
La determinarea indicatorilor de fiabilitate este necesară prelucrarea statistică a datelor experimentale, prelucrare care cuprinde mai multe etape.
Condiţia pentru estimarea corectă a parametrilor statistici specifici procesului
analizat o constituie asigurarea omogenităţii materialului statistic prelevat. Caracterul nealeator al datelor experimentale este caracterizată prin următoarele:
prezenţa unor tendinţe; prezenţa unor fluctuaţii periodice; existenţa unor discontinuităţi; prezenţa unor valori extreme aberante;
Testele principale pentru verificarea caracterului aleatoriu al datelor experimentale
sunt următoarele: metoda irităţiilor: metoda diferenţelor succesive: metoda aglomerării pe faze.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
224
7.3 Criterii pentru întocmirea programelor de încercare la fiabilitate Din cele prezentate în subcapitolele precedente rezultă că volumul încercărilor de
fiabilitate şi nivelul de elaborare al metodicilor de încercare se subordonează concomitent scopului şi tipului de încercare. Marea varietate (cantitativă şi calitativă) a lucrărilor implicate nu exclude însă existenţa unor criterii orientative comune ce trebuie să stea la baza întocmirii în detaliu a programelor de încercare. Dintre acestea, trebuie subliniate următoarele:
stabilirea cu exactitate a circumstanţelor şi cauzelor reale ale defectărilor; definirea exactă a stării de defectare şi a defectării însăşi, pentru toate
elementele, ansamblurile şi agregatele urmărite, precum şi pentru autovehicul în ansamblu;
cunoaşterea exactă a condiţiilor de exploatare, sub aspectul regimului de solicitare, nivelului tehnic al exploatării şi a altor particularităţi de utilizare;
folosirea unui limbaj corect şi fără echivoc, inclusiv limbajul statisticii matematice şi al teoriei fiabilităţii;
asigurarea unei informări operative asupra rezultatelor obţinute în timpul încercărilor încă din primele faze ale acestora;
asigurarea unei anumite elasticităţi a programului de încercare, pentru a permite reorientarea acestuia în funcţie de semnificaţia primelor rezultate analizate.
Ca şi celelalte încercări, încercările de fiabilitate trebuie integrate într-un program de fiabilitate la nivelul întreprinderii constructoare sau de transport, în conexiune cu programul de gestiune a calităţii. Aspectele economice nu trebuie subestimate, deoarece utilizarea informaţiilor obţinute trebuie să compenseze cheltuielile de încercare, în cea mai mare parte costisitoare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
225
8 ÎNCERCAREA AUTOVEHICULEOR ÎN CONDIŢII GRELE
Încercările care fac obiectul acestui capitol se vor referii la acele condiţii sau regimuri de funcţionare a căror pondere în ansamblul condiţiilor de funcţionare sunt restrânse, respectiv acele condiţii sau regimuri care în exploatarea autovehiculelor sunt întâlnite rar.
Constructorul de autovehicule defineşte calităţile de exploatare ale acestora pentru anumite condiţii medii, în raport cu care apar şi condiţii extreme, care sunt tratate din punct de vedere al încercărilor în capitolul de faţă. Aceste stări afectează unele calităţi de exploatare şi nu în ultimul rând, economicitatea, dinamicitatea şi fiabilitatea autovehiculelor.
Condiţiile meteo-climaterice şi de relief care au caracter extrem ale ţării care produce autovehicule poate deveni normale în condiţiile altor ţări unde autovehiculul ar putea fi exploatat sau se află în tranzit. Caracterul extrem în condiţiile meteo-climaterice şi de relief ale ţării noastre este dat de următorii factori:
particularităţile drumurilor caracterizate prin rezistenţa la înaintare deosebit de mari care solicită motorul în regim de cuplu maxim;
temperaturile mediului ambiant care pot fi egale sau mai mici de –30°C, egale sau mai mari de 30°C;
gradul de prăfuire al aerului; altitudinea ridicată, care poate fi mai mare de 1500 ... 2000m; diferite combinaţii ale factorilor enumeraţi.
În anumite ţări cum este şi ţara noastră unele încercări de acest tip se pot efectua numai în anumite perioade ale anului şi pe o reţea restrânsă de trasee, fapt pentru care trebuie făcută o pregătire din timp, având în vedere că în mod frecvent nu există posibilităţi de repetare ale acestora.
În cazul autovehiculelor pregătite pentru export, unele din aceste încercări se pot efectua peste hotare, în condiţiile zonei geografice ce se are în vedere la pregătirea unor autovehicule pentru export.
8.1 Încercarea funcţionării îndelungate a autovehiculelor în regim de putere maximă
Încercările în regim de putere maximă se execută în condiţii pe piste inelare de
viteze, datorită faptului că ele implică deplasarea îndelungată a autovehiculului cu viteză maximă, deoarece este riscant de efectuat pe drumuri de circulaţie publică, chiar dacă ar fi autostrăzi. Prin funcţionarea îndelungată la viteză maximă ia naştere un echilibru dinamic între deplasările de energie prin frecare ce au loc în motor, agregatele transmisiei şi sistemul de rulare şi degajările de căldură în mediul ambiant. În felul acesta se urmăreşte ca temperatura la care se stabilizează echilibrul dinamic să nu aibă valori care să pună în pericol buna funcţionare a agregatelor şi sistemelor autovehiculelor. Fluxul termic de intrare în agregate la aceste încercări este mult mai mare decăt la încercările făcute pentru cuplul maxim, datorită vitezei relative a aerului

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
226
ambient de 8 ... 10 ori mai ridicate, deci, sub aspectul regimului termic, încercările în regim de putere maximă sunt complementare celor în regim de cuplu maxim.
Pentru încercare, autovehiculul se echipează cu aparatură de măsurare şi înregistrare a temperaturii apei de răcire şi uleiului din motor, uleiului din agregatele transmisiei şi a pneurilor (superficial şi în masa pneului), neglijându-se frânele şi treptele din reductoarele transmisiei care sunt solicitate într-o măsură foarte restrânsă fapt care face ca ele să nu fie urmărite.
Durata încercărilor din acestă categorie, se stabileşte în funcţie de complexitatea obiectivelor urmărite, astfel dacă se doreşte cunoaşterea doar a valorilor de echilibru termic ale temperaturii de lucru a agregatelor ce se stabilizează la valori asimptotice specifice, sau dacă se urmăreşte efectul de durată al fluxului termic sporit, manifestat prin fenomenul de uzare sau oboseală, încercarea se continuă pe un parcurs mai mare (mii sau zeci de mii de kilometri) devenind în această situaţie o încercare de fiabilitate accelerată şi trebuie pregătită ca atare, situaţie în care se fac măsurători preliminare ale pieselor supuse uzurii, planificarea operaţiilor de mentenanţă, ţinerea evidenţei defectărilor etc. Această încercare este scumpă justificându-se numai în cazul când volumul de fabricaţie al tipului de autovehicul încercat este suficient de mare pentru ca cheltuielile să fie amortizate fără a afecta costul.
Varietatea indicatorilor care trebuie măsuraţi la funcţionarea îndelungată a autovehiculului în regim de putere maximă duce la o varietate corespunzătoare a mijloacelor de măsurare utilizate. În general sunt folosite traductoare de cuplu şi temperatură (termocupluri) a căror semnale se amplifică şi se vizualizează. Se înregistrează sau se introduc într-un sistem de prelucrare statistică. În unele cazuri indicatorii de putere sau lucru mecanic se obţin indirect prin multiplicarea electronică a unor semnale date de traductoare cuplu-turaţie, rezultat care este proporţional cu puterea, iar integrarea semnalului va da lucrul mecanic.
Aparatura de înregistrare şi măsurare utilizată la încercările din categoria celor prezentate se dispune în general în caroseria autovehiculul de încercat, astfel încât problema legăturii dintre traductoare, amplificatoare şi aparatura de înregistrare a semnalelor este relativ simplu de rezolvat. Sunt însă necesare măsuri speciale de protejare a aparaturii. Atunci când alimentarea cu curent a aparaturii de măsurare nu e de tipul “cu baterie” sau “de la baterie”, trebuie un convertor de putere adecvat şi montarea pe autovehicul a unei baterii de acumulatoare de capacitate suficientă.
8.2 Încercarea funcţionării autovehiculului în condiţii de temperatură scăzută a mediului ambiant
Limita inferioară a temperaturii mediului ambiant, în ţara noastră, oscilează în jurul
valorii de –30 ... 35°C, situaţie în care este necesar ca utilizarea să nu întâmpine dificultăţi .
Utilizarea autovehiculului în aceste condiţii sau chiar la temperaturi superioare limitelor prezentate, este însoţită de o serie de dificultăţi specifice, în sensul că funcţionarea motorului şi a altor agregate se înrăutăţeşte ca urmare a creşterii vâscozităţii combustibilului şi uleiului, a înrăutăţirii ungerii, scăderii performanţei bateriei de acumulatoare, a elasticităţii pneurilor etc.. De asemenea se măreşte fragilitatea şi

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
227
riscul de rupere a reperelor din mase plastice şi cauciuc, se înrăutăţeşte funcţionarea sistemelor de alimentare din cauza formării unor dopuri de gheaţă în tubulatură, conducerea autovehiculului devine mai dificilă, mai ales atunci când sunt acoperite cu un strat de zăpadă sau ghiaţă şi nu în ultimul rând randamentul conducătorului auto este afectat defavorabil de temperaturile scăzute.
Încercarea autovehiculului în condiţiile arătate se face în scopul verificării eficienţei măsurilor constructive (instalaţiilor şi dotărilor specifice) menite să asigure utilizarea normală a acestuia, efectuarea sarcinilor de transport, sau stabilirea necesităţii unor astfel de măsuri. În acest sens se au în vedere mijloacele de uşurare a pornirii motorului, mijloacele de reglare a temperaturii fluidului de răcire, instalaţia de încălzire a cabinei (caroseriei), mijloacele antiderapante şi instalaţia de reglare centralizată a presiunii din pneuri.
Aprecierile instalaţiilor şi mijloacelor arătate se fac în conformitate cu instrucţiunile din documentaţia de execuţie. Verificarea eficacităţii preîncălzitoarelor de pornire, apreciată prin timpul de creştere a temperaturii apei de răcire şi uleiului pană la o valoare bine stabilită se face la punct fix, după o staţionare a autovehiculului sub cerul liber timp de 12 ... 24 ore. Pentru alte verificări este necesar un rulaj de 50 ... 100 Km, pe un traseu fără declinităţi mari, bine cunoscut (sub aspectul naturii, stării îmbrăcăminţii, al limitelor şi particularităţilor acostamentului), înzăpezit, urmărindu-se evoluţia apei de răcire şi a uleiului din motor circulându-se cu jaluzelele închise sau cu eventualele huse prevăzute de fabricant a uleiului din agregate transmisiei, a aerului din cabină sau caroserie (instalaţia de încălzit fiind în funcţiune). Viteza medie pe toată durata efectuării încercărilor se stabileşte în funcţie de limita permisă condiţiilor de drum, în jur de 15 Km/h. În timpul încercărilor se vor măsura din 10 în 10 minute temperatura şi umiditatea aerului, viteza vântului, grosimea stratului de zăpadă, funcţionarea ştergătoarelor de parbriz.
Înainte de efectuarea rulajului, autovehiculul va fi pregătit comform instrucţiunilor exploatării de iarnă şi anume: se va verifica dacă în instalaţia de răcire se află lichidul antigel prescris, dacă s-au utilizat uleiuri de iarnă, dacă dispozitivul antigel din componenţa transmisiei pneumatice a frânelor este umplut cu lichid. De asemenea se va verifica dacă preâncălzitorul de pornire, instalaţia electrică şi în primul rând bateria de acumulare se află în stare de funcţionare.
Date fiind condiţiile atmosferice precare în care se efectuează încercările din această categorie, este indicat ca la rulaj să participe şi un autovehicul de intervenţie cu caracteristici adecvate, la care să se facă apel atunci când mijloacele de mărire a capacităţii de trecere din dotarea sau componenţa autovehiculului încercat se dovedesc a fi insuficiente în anumite cazuri.
8.3 Încercarea funcţionării autovehiculelor în condiţii de temperatură ridicată a mediului ambiant
Asemenea condiţii de lucru în ţara noastră pot fi întâlnite de autovehiculele cu mare
capacitate de trecere sau autovehiculele destinate şantierelor, utilizate în zonele cu climat excesiv în perioada de vară (Dobrogea, sudul Moldovei, Câmpia română).

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
228
Aproape în toate cazurile, temperaturile ridicate sunt însoţite ca urmare a particularităţilor utilizării de un grad înalt de prăfuire a aerului.
Rezistenţa la înaintare sporită, datorită circulaţiei în afara drumurilor sau pe drumuri nemodernizate, duce la funcţionarea motorului în regim de cuplu maxim şi în consecinţă viteze mici de deplasare. Acest lucru duce în general la supraîncălziri puternice ale motorului şi agregatele transmisiei, supraîncălzirea motorului fiind datorată şi de reducerea eficacităţii radiatorului, ca urmare a îmbâcsirii cu praf. În acelaşi timp, gradul sporit de prăfuire a aerului duce la îmbibarea rapidă a filtrelor de aer, la pătrunderea aerului în motor şi uzarea rapidă a suprafeţelor de frecarea ale acestuia. Capetele de bară de direcţie şi pivoţii fuzetei fiind expuse prafului, suferă, de asemenea o uzare rapidă.
Temperatura ridicată în cabină (caroserie) la care se adaugă temperatura produsă de supraîncălzire a motorului, reducerea vizibilităţii drumului datorită norilor de praf, praful pătruns în cabină (caroserie), înrăutăţesc în mod simţitor condiţiile de conducere şi comfort, în cazul când instalaţia de ventilaţie sau condiţionare a aerului nu este în măsură să răspundă la astfel de suprasolicitări.
În condiţiile arătate, încercarea autovehiculului, necesită: măsurarea regimului termic al motorului (temperatura apei de răcire la ieşirea din
motor şi a uleiului din baia de ulei) şi al agregatelor transmisiei (cutia de viteze, cutia de distribuţie, carterele punţilor);
înregistrarea condiţiilor de funcţionare a motorului (turaţia, cuplu, numărul însumat de rotaţii) şi transmisiei (timpul de deplasare în diferite trepte de viteze) şi numărul de schimbări de viteze;
măsurarea vitezei medii de deplasare a autovehiculului pe traseul de încercare; măsurarea temperaturii şi gradul de prăfuire a aerului din cabină (caroserie); măsurarea temperaturii, presiunii şi umidităţii aerului ambiant şi a vitezei vântului şi determinarea concentraţiei prafului din aer la înălţimi de 0,5...2m de sol;
determinarea parametrilor şi microprofilului terenului sau drumului inclus în traseul de cercetare.
Aceste încercări vor fi efectuate pe trasee cu rezistenţă la înaintare deosebit de mari şi anume: terenuri nisipoase, mirişti, arături, drumuri în balastiere etc. Sectorul de măsurare trebuie să aibă o lungime de cel puţin 50 ... 100 Km, admiţându-se şi rulaje în circuit închis. Încercările vor fi efectuate la orele cele mai calzi ale zilei (10 ... 16), la temperaturi ale aerului ambiant peste 30°C, pe timp lipsit de precipitaţii.
La parcurgerea traseului autovehiculul de încercat se va deplasa cu viteza maximă permisă de natura terenului, ţinând seama că aceasta este limitată de condiţiile de “mers lin”, iar sarcina utilă se va reduce corespunzător indicaţiilor uzinei constructoare sau proiectantului pentru categoria de drum pe care se efectuează încercările.
Înainte de efectuarea fiecărui rulaj, se fac plinurile cu ulei şi se montează elemente filtrante noi, iar după încheierea rulajului, se iau probe de ulei din carterul motorului şi agregatele transmisiei în vederea determinării cantităţii de praf pătrunse în aceste ansambluri. De asemenea, se iau probe de aer din diferite puncte ale cabinei (caroseriei) şi la diferite intervale ale rulajului. În situaţia în care regimul termic al agregatelor depăşeşte limitele normale, încercarea se întrerupe până la răcire adecvată, notându-se timpul de staţionare necesar în acest scop. Aceste încercări se recomandă să aibă un caracter comparativ (să fie încercat concomitent şi un

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
229
autovehicul de referinţă, iar momentele caracteristice să fie fotografiate, filmate şi prezentate cu toate detaliile necesare pentru o reconstituire ulterioară).
La autovehiculele tropicalizate, verificarea funcţionării în condiţie de temperatură ridicată a mediului ambiant şi rezistenţe mari la înaintare constituie un examen hotărâtor, însă se recomandă ca aceste încercări să se efectueze în condiţii reale, adică în zona geografică avută în vedere şi să fie completate cu verificarea capacităţii de trecere şi dinamică precum şi consumul de combustibil.
Pentru măsurarea numărului de cuplări sau acţionări de comenzi (pedala de frână, de ambreiaj, maneta cutiei de viteze) se poate face relativ simplu, cu ajutorul unor microîntrerupătoare montate convenabil pe comenzi sau conexiuni cu acestea şi a unor contoare electromagnetice. Simplitatea metodei permite neinducerea ei în sistemul complex de măsurare a celorlalte mărimi ce caracterizează funcţionarea autovehiculului în condiţii de temperatură ridicată.
8.4 Încercarea comportării autovehiculelor în zone montane de mare altitudine
Deplasarea pe drumuri de munte este caracterizată prin serpentine frecvente şi de curbură mare, urcuşuri şi coborâşuri îndelungate şi abrupte, iar în unele cazuri, printr-o calitate proastă a îmbrăcămintei, lucru ce atrage funcţionarea motorului în sarcini variabile cu predominarea regimului de lucru la cuplul maxim şi utilizarea motorului ca frână. Altitudinea ridicată duce la scăderea puterii motorului, datorită reducerii gradului de umplere şi perturbarea reglajului optim al agregatelor auxiliare.
În acelaşi timp apar perturbaţii la regimul termic al motorului şi anume: la urcuşuri îndelungate pot apare supraîncălziri, iar la coborâri – cu motorul la
mers în gol forţat şi ucrând ca frână – subrăciri; la altitudine mare, scade densitatea aerului reducând schimbul de căldură al
radiatorului cu atmosfera, precum şi productivitatea radiatorului; sunt afectaţi de asemenea, parametrii funcţionali ai aparatelor instalaţiei
electrice. Acţiunea factorilor enumeraţi duce la utilizarea parţială a disponibilităţilor motorului
îngreunând condiţiile de funcţionare ale acestuia. Prin scăderea puterii trebuie să se recurgă la o utilizare mai frecventă a treptelor de viteze inferioare din cutia de viteze, ceea ce face ca motorul să funcţioneze în regim de cuplu maxim, provocând creşterea solicitărilor din transmisia autovehiculului. În acelaşi timp sistemul de direcţie este supus unor solicitări deosebite ca urmare a virajelor frecvente, cu unghiuri mari de bracare ale roţilor de direcţie, de asemenea, frânele de serviciu sunt intens solicitate la coborâri. Toate aceste fenomene se pot asocia în anumite condiţii şi cu o stare proastă a îmbrăcăminţii drumului, fie ca microprofil, fie ca aderenţă, lucru ce afectează negativ fiabilitatea autovehiculului în ansamblul său.
Încercările privind comportarea autovehiculului în zone montane de mare altitudine au ca scop determinarea măsurării în care funcţionarea agregatelor şi ansamblurilor autovehiculului este afectată de particularităţile menţionate mai sus şi stabilirea eventualelor măsurări constructive sau de exploatare care să permită utilizarea sigură a autovehiculului în asemenea situaţie. La astfel de încercări se supun numai tipurile noi de autovehicule (modele experimentale şi prototipuri) sau autovehiculelor care lucrează

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
230
în condiţii de rulaj montan şi la altitudine ridicată, la care comportarea nu este cunoscută.
În anumite situaţii se efectuează şi încercări de fiabilitate, mai ales la beneficiar, în condiţii de exploatare reală, în cariere montane, exploatări forestiere, şantiere, care au ca scop stabilirea durabilităţii autovehiculelor, precizarea perioadelor optime de efectuare a lucrărilor de mentenanţă (întreţineri tehnice), stabilirea consumului de combustibil, piese de schimb etc.
Încercările din primul caz constau în parcurgerea a 2 ... 3 intinerare dus-întors pe trasee cu zone aflate în cea mai mare parte la altitudini de 1500 ... 2000 m, lungi de 50 ... 100 Km, timp în care se măsoară şi se înregistrează temperatura şi presiunea atmosferică, umiditate, viteza vântului, altitudinii, stările şi declinităţile drumului precum şi parametrii principali ai agregatelor autovehiculului şi anume:
temperatura lichidului de răcire a motorului la ieşirea din acesta; temperatura uleiului din motor şi din agregatele transmisiei; temperatura saboţilor de frână; cuplul motorului şi numărul însumat de rotaţii ale motorului care se vor raporta la
1 Km de drum parcurs; treapta de viteze în care s-a circulat pe diferite porţiuni de drum; numărul de frânări raportat, de asemenea la 1 Km de drum; distribuţia valorilor deceleraţilor de frânare.
Unii dintre parametrii enumeraţi pot fi măsuraţi direct cu ajutorul unor traductoare specifice cum sunt: mărci tensometrice, traductoare de cuplu, turaţie, deplasare, traductoare de acceleraţie, termocupluri etc.
Semnalele date de traductori se amplifică şi se vizualizează, se înregistrează, sau se întroduc într-un sistem de prelucrare (clasificare) statistică.
Valorile măsurate şi înregistrate se corelează cu profilul longitudinal al traseului de încercare şi cu timpul de parcurgere corespunzător.
Prin cronometrări, se vor determina vitezele medii pe diferite sectoare caracteristice ale traseului şi pe întreg traseul. În acest scop se poate utiliza şi un vitezograf montat în locul vitezometrului de bord. Diagrama vitezografului permite nu numai determinarea cu
Fig. 8.1. Schema profilului longitudinal al drumului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
231
precizie a vitezei medii, ci şi evidenţierea unor particularităţi ale parcurgerii sectorului (sectoarelor) de măsurare cum ar fi: uniformitatea deplasării, funcţionarea motorului la turaţia indicată duratele unor opriri etc. Totodată vitezograful asigură şi un confort asupra modului de conducere a autovehiculului de către conducătorul experimentărilor. Profilul longitudinal al drumului se poate trasa pe baza unor date cartografice existente la direcţiile regionale sau cu ajutorul unui altimetru montat la bord, distanţele măsurîndu-se cu contorul de kilometri de bord care a fost efectuat în prealabil sau pe baza bornelor kilometrice, dacă există. Înclinările medii ale drumului pe sectoarele caracteristice se vor prelua din schema profilului drumului prezentată în figura 8.1, iar înclinările locale şi lungimile respective se vor determina cu un clinometru şi o ruletă.
În figura 8.1 au fost folosite urmăoarele notaţii: i1, i2, ... i6 reprezintă valorile pantei drumului pe sectoarele înclinate; L1, L2 ... L6 – lungimile sectoarelor de drum în pantă; LI, LII, LIII – lungimile sectoarelor de drum în palier; h1, h2 ... h6 – diferenţele de nivel între diferitele sectoare de drum; H – diferenţa de nivel între punctele extreme A şi B ale traseului.
Sinuozitatea traseului se poate aprecia cu relaţia:
m
c
RL
S = ( 8.1)
în care Lc este lungimea însumată a porţiunilor curbilinii în serpentinele traseului; Rm – raza medie a curburilor.
Sinuozitatea traseului S se va raporta de asemenea la 1 Km de drum. Mărimea S se va determina fie în baza planului drumului, la scară adecvată,
analizat în prealabil, fie utilizănd un dispozitiv special, montat în conexiune cu volanul şi care permite măsurarea unghiului de bracaj al roţilor de rotire al volanului în raport cu poziţia neutră. Ţinând cont de complexitatea parametrilor care trebuie măsuraţi şi înregistraţi la dotare autovehiculului care face obiectul încercărilor cu aparatură trebuie să se ţină seama de cerinţele economice ale încercărilor, se recomandă ca determinarea regimurilor de funcţionare să se efectueze centralizat, în sensul că în cadrul unui singur rulaj sau al unei singure succesiuni de rulaje caracteristice să se urmărească concomitent cât mai mulţi indicatori ai regimurilor respective, deziderat care poate fi atins prin utilizarea unor sisteme de măsurare multicanal, compatibile cu o gamă largă de tipuri de traductoare (rezistive, capacitive, inductive, electrodinamice, piezoelectrice, termocupluri, termistoare, termorezistenţe) şi în componenţa cărora intră diverse aparate de condiţionare şi amplificare a semnalelor.
Autovehiculele supuse încercărilor în prealabil trebuie rodate pe un parcurs de 5.000 ... 10.000 Km şi verificate minuţios din punct de vedere tehnic înaintea începerii rulajului de încercare. Regimurile de funcţionare se vor urmării pe tot parcursul încercărilor, iar în cazul ieşirii acestora din limitele prescrise şi anume: fierberea apei de răcire, temperaturi ale uleiului din motor mai mari de 110°C, temperaturi a tamburilor de frână mai mari de 100°C, temperatura lichidului din dispozitivele de frânare hidraulice mai mari de 80°C etc., autovehicululul se va urmări până la revenirea la condiţii de lucru normale. Observaţiile referitoare la incidentele tehnice survenite, modificări de reglaje, avansul la aprindere şi injecţia etc., vor fi notate şi analizate ulterior. Vor fi consemnate de asemenea incidentele legate de natura drumului şi modul în care mijloacele din dotarea autovehiculului au depăşit situaţiile critice.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
232
În cazul în care există condiţii adecvate, se recomandă şi o verificare a unor parametrii de exploatare ai autovehiclulelor la altitudine ridicată cum ar fi: viteza maximă rampa maximă şi consumul de combustibil.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
233
9 ÎNCERCĂRI PRIVIND SIGURANŢA PASIVĂ A AUTOVEHICULELOR
9.1 Generalităţi Siguranţa circulaţiei şi automobilul au fost mult timp doi parteneri dificil de împăcat.
În perioada copilăriei automobilului, proiectanţii şi inginerii au acordat o atenţie redusă pericolelor apărute o data cu noua “aventură”. Sistemele de direcţie, frânare şi suspensie au evoluat, devenind eficace, dar aceste progrese s-au datorat nevoii de îmbunătăţire a noului şi revoluţionarului mijloc de transport, fără a se ţine cont de vreun principiu de siguranţă în adevăratul sens al cuvântului.
Siguranţa pasivă poate fi definită prin: „reducerea consecinţelor accidentelor”, şi poate fi împărţită în:
Siguranţa exterioară, acest termen acoperind toate măsurile de reducere a severităţii vătămărilor în cazul coliziunii dintre autovehicule şi pietoni, biciclişti sau motociclişti. Factorii care influenţează siguranţa exterioară sunt forma autovehiculului şi comportamentul la deformare a caroseriei;
Siguranţa interioară, prin aceasta urmărindu-se minimizarea forţelor şi acceleraţiilor care acţionează asupra ocupanţilor unui autovehicul în eventualitatea unui accident. Dintre factorii care influenţează siguranţa interioară se pot aminti:
Deformarea caroseriei autovehiculului; Sistemele de reţinere a pasagerilor şi bagajelor; Interiorul autovehiculului, prin zonele posibil de a fi lovite de pasageri; Sistemul de direcţie; Modul de fixare a parbrizului; Protecţia împotriva incendiilor; Penetrarea prin parbriz a diferitelor componente din construcţia autovehiculului.
În anul 1930 statisticile privind victimele “armei mortale” erau indiscutabil nefavorabile. Numărul victimelor la 100.000 de mile parcurse de automobile a ajuns în USA la 15,6 persoane în comparaţie cu 3,5 în anul 1980 şi 1,8 în prezent. Cifrele sunt într-o continuă scădere, dar ar trebui să fie mult mai mici pentru ca societatea să privească transportul rutier ca sigur.
Cel mai bun şi sigur mod de a supravieţui unui accident este de a nu-l avea. Cu toate că pregătirea şi instruirea conducătorului auto sunt cele mai ieftine şi ideale căi de creştere a siguranţei rutiere efective, din păcate nici una dintre ele nu este cu adevărat eficace şi obiectivul de creare a unui mediu rutier mai sigur a revenit tehnologiei.
O primă soluţie este aceea de a proiecta autovehicule şi infrastructuri rutiere care sunt suficient de competitive în sensul prevenirii apariţiei unui accident. Pericolele sunt evitate prin utilizarea unei întregi game de tehnologii, de la frânarea ABS şi anvelopele radiale (în curs de dezvoltare pre - frânarea automată pentru evitarea obstacolelor) până la diverse materiale pentru învelişul asfaltic şi controlul computerizat al traficului urban.
A doua soluţie este de a construi autovehicule care să protejeze ocupanţii în caz de accidente. Această soluţie defineşte conceptul de Securitate Pasivă oferită de autoturism pasagerilor în caz de accident.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
234
Cele două aspecte ale siguranţei rutiere coexistă, fiind complementare unul celuilalt, rămânând totuşi independente unul de celălalt.
Astăzi, companiile producătoare de autovehicule se confruntă cu reglementări legislative tot mai stricte în privinţa numeroaselor aspecte ale siguranţei pasive a autovehiculelor. Siguranţa pasagerilor unui autovehicul şi a pietonilor a condus la necesitatea înţelegerii efectelor accidentului asupra oamenilor, fiinţe complexe în întregul lor, dar care se subdivid în bărbaţi, femei şi copii, având diferite caracteristici biologice şi fizice.
Pe baza studiilor statistice întreprinse asupra accidentelor de circulaţie s-au elaborat o gamă vastă de teste executate în condiţii de laborator, care să verifice comportarea din punctul de vedere al securităţii pasive a modelelor noi de autovehicule. O enumerare a câtorva din acestea se face în tabelul 9.1.
Tabelul 9.1 Obiectivul testului Tipul de încercare
Gradul de vătămare corporală Impact frontal Impact oblic Impact lateral Impact din spate Impact frontal decalat Răsturnare fără impact
Integritatea habitaclului Impact frontal Impact lateral Impact din spate Impact frontal decalat
Penetraţia volanului Impact frontal Rezistenţa scaunelor Impact frontal şi din spate Rezistenţa puntelor de ancorare a centurilor de siguranţă
Verificarea forţelor şi a poziţionării
Rezistenţa centurilor de siguranţă Rezistenţa barelor paraşoc Impact frontal
Impact oblic Deformaţia pavilionului Verificarea rezistenţei prin căderea pe pavilion
Din datele statistice rezultă că un procent de peste 60% din totalul accidentelor îl
reprezintă coliziunile frontale. O clasificare a tipurilor de teste, reglementate legislativ, este prezentată în tabelul 9.2. coliziunile laterale deţin un procent de 30% din totalul numărului de accidente. Peste 26% din totalul deceselor în urma accidentelor rutiere şi peste 17% din totalul vătămărilor grave au loc în cazul coliziunilor laterale. O clasificare a testelor de coliziune laterală la care sunt supuse autovehiculele în laboratoarele de securitate pasivă sunt prezentate în tabelul 9.3.
Impactul dintre vehicul şi pieton este în prezent o problemă foarte importantă a Securităţii Pasive. Date culese din întreaga lume indică faptul că în accidentele rutiere sunt ucişi mult mai mulţi pietoni decât pasageri ai vehiculelor implicate. Un pieton lovit cu o viteză de 60 km/h este foarte probabil sa fie ucis, indiferent de soluţiile de siguranţă incorporate în autovehicul. Separarea pietonilor de trafic prin infrastructuri stradale este cea mai mare contribuţie în domeniul siguranţei pietonilor, tehnologia având un cuvânt important de spus în acest domeniu. În prezent companiile constructoare de autoturisme, perfecţionează echipamente care să permită evitarea coliziunii, pe bază de radar sau ultrasunete, care să pre-frâneze autovehiculul la apariţia

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
235
pericolului de a lovi un obstacol, inclusiv un pieton. Prevenirea coliziunii precum şi munca în domeniul Securităţii Pasive se materializează la General Motors prin adaptarea a peste 100 de tehnologii, inclusiv sisteme electronice create cu scopul de a stopa modalităţile de conducere agresivă.
9.2 Manechine antropometrice Proiectarea şi producerea de manechine pentru coliziuni, care permit producătorului
realizarea unor vehicule mai sigure a devenit o mică industrie, însă de înalt nivel tehnologic. Principalii producători mondiali sunt First Technology, o campanie britanică, care are o sucursală, inclusiv o fabrică, în Plymouth şi Robert Denton Inc. din USA. Manechine complete şi părţi de rezervă se livrează în aproximativ 500 de unităţi pe an. Sunt disponibile şase dimensiuni ale manechinelor - toate variante de Hybrid III - manechine copii în diferite faze pentru testarea scaunelor destinate lor, manechine
pieton şi manechine pentru coliziunile laterale în diferite variante. Iniţial, copiii manechin au avut tendinţa de a nu fi decât un “sac de fasole”, dar First Technology a dezvoltat un model foarte instrumentat CRABI (Child Restraint and Air-Bag Interaction dummy), acest manechin simulând un copil în vârstă de 6 luni. În acest moment un manechin Hybrid IV (THOR) este în cercetare şi dezvoltare în cadrul unui contract al Departamentului Transporturilor USA şi Universitatea din Michigan.
Manechinul Hybrid III, prezentat în figura 9.1, a fost proiectat să aproximeze mărimea, forma, şi masa a 50% din bărbaţii adulţi. Scheletul manechinelor este compus în primul rând din elemente metalice care îi conferă o bună rezistenţă structurală. Această structură este acoperită cu piele de vinil şi spumă care îi dau forma
umană externă dorită. Vinilul a fost ales pentru piele deoarece poate fi reparat uşor prin încălzire. Hybrid III prezintă o coloană vertebrală curbată de cauciuc care dă, în poziţia aşezat, forma dorită a conducătorului auto. Articulaţiile, torsionabile cu un moment constant, sunt folosite la umeri şi genunchi pentru a minimaliza timpul necesar reglării rezistentei articulaţiei. Structura umărului a fost proiectată să reziste încărcărilor date de centura de umăr. Răspunsul acceleraţiei capului manechinului Hybrid III mimează răspunsul acceleraţiei capului uman pentru impactul capului în faţă şi în lateral. Răspunsul îndoirii în faţă şi în lateral a gâtului său mimează răspunsul uman. Structura pieptului său mimează răspunsul uman al reflectării forţei pentru impacturile directe
Fig. 9.1. Manechinul Hybrid III.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
236
distribuite pe stern. Genunchii săi au fost proiectaţi să mimeze datele impactului genunchilor umani. Originalul Hybrid III folosea articulaţii mecanice care transmiteau forţele axiale dar nu şi pe cele de torsiune atât pentru genunchi cât şi pentru articulaţia gleznei. Ca rezultat al testării susţinerii genunchiului articulaţia genunchiului a fost modificată astfel încât să permită translaţia înainte - înapoi a tibiei relativ cu femurul iar articulaţia gleznei a fost modificată, ea având în componenţă o articulaţie sferică pentru a permite rotaţia laterală a piciorului relativ cu tibia. În plus partea centrală a tibiei a fost dotată cu instrumente cu care să se evalueze o varietate de vătămări ale piciorului. Recent Begeman şi Prasad au prezentat date recoltate de la cadavre care sugerează ca unghiul de dorsiflexie al gleznei ar trebui mărit de la 30 de grade la 45 de grade. Un prototip al articulaţiei a gleznei care incorporează aceasta creştere a unghiului a fost dezvoltată şi în prezent este evaluată.
Manechinul Hybrid III s-a dovedit a fi o unealtă de testare foarte reuşit deoarece are bune calităţi de repetabilitate şi durabilitate. Capacităţile sale de măsurare şi o bună biofidelitate permit o evaluare mult mai bună a eficacităţii sistemelor de reţinere a pasagerilor, decât datele furnizate de măsurătorile efectuate cu manechinul Hybrid II.
Pentru studii accidentologice şi optimizări constructive ale autoturismelor se fabrică în prezent şi o variantă de biomanechin Hybrid III pieton.
Cu toate că au devenit foarte sofisticaţi, manechinele nu reuşesc să simuleze în întregime corpul uman. Elementele esenţiale includ greutatea şi centrul de greutate. Nu a putut fi proiectat nimic care să simuleze creierul, însă pot fi măsurate acceleraţiile liniare şi unghiulare. Statistici despre leziunile cerebrale posibile pot fi extrapolate din rezultatele testelor. First Technology lucrează pentru a dezvolta manechine cu oase din fibra de carbon sau Kevlar (CRABI are deja oase din material plastic), datorită faptului că aceste materiale sunt capabile sa simuleze mai bine răspunsul la forţe de zdrobire şi ar putea respecta mai bine raportul greutate/densitate. O cutie toracică din materiale compozite poate fi o aplicaţie particulară a acestei tehnologii. Manechine cu mai multe canale vor fi utilizaţi, chiar dacă vor fi mai sofisticaţi. O altă direcţie de dezvoltare este cea a “ manechinilor oblici ” folosiţi în teste de răsturnări şi coliziune laterală. Nu trebuie însă uitat, ca există o diferenţă între biofidelitatea şi durabilitatea unui manechin. Vorbind la modul general, în prezent, cu cât este mai biofidel un manechin, cu atât el devine mai puţin fiabil. În mod normal viaţa medie a unui set de coaste este de aproximativ 30 de teste NHTSA. Materialele compozite ar trebui să mărească durabilitatea o dată cu menţinerea biofidelităţii.
Coliziunea simulată pe computer este acum un element cheie în proiectarea auto, iar companiile consideră că aceasta şi testarea fizică sunt complementare. Simularea scurtează programele de cercetare şi economiseşte fonduri, dar testele fizice sunt aproape totdeauna necesare. Testele fizice sunt numeroase şi variate, dar tipic este un test al impactului cu toracele efectuat pentru a simula un impact la 24 Km/h. Forţa de rezistenţă a cutiei toracice este măsurată înmulţind acceleraţia blocului de test cu masa sa. Un traductor măsoară comprimarea coastelor. First Technology şi Robert Denton văd companiile constructoare de autovehicule devenind foarte interesate în dezvoltarea şi integrarea unui scaun pentru copil şi în folosirea unor manechine pietoni.
Eforturile depuse de către producătorii de autovehicule şi de specialiştii companiilor în domeniul securităţii pasive a vehiculelor nu au fost niciodată aşa de mari, şi reflectă interesul public în privinţa fiecărui aspect.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
237
Tabelul 9.2 Japonia Regulamente de siguranţă
japoneze, Articolul 18 paragraful 2 USA FMVSS 208 Europa ECE/96/79 Canada CMVSS 208 Australia ADR 69/00
Categoria de aplicare; Data aplicării
Automobile cu tipuri diferite de capote.
Apr. 94 – continuat cu vehicule noi Ian. 96 – capota de tip comercial;
Automobile: Sept. 86 – Camioane (> 3.5 t): Sept. 94 -
M1 (≤ 2,5 t): Nou tip oct. 98 -, aplicare din Oct. 2003
Automobile: Ian. 98 – (HIC este aplicabil după sept 98)
Camioane: Ian. 98 – (HIC/ deplasarea torace este aplicabilă
după sept 98)
Nou tip Iul. 95 -, continuat ian 96 – cu bariera mobilă
Tipul coliziunii
Coliziune frontală
Coliziune frontală / Coliziune decalată unghiular cu 30°
Coliziune decalată 40%
Coliziune frontală
Coliziune frontală
Viteza de impact 50 km/h 30 MPH (48,3 km/h) 56 km/h 48 km/h 48 km/h
Greutatea autovehiculului testat
Greutatea autovehicul neîncărcat + 2 manechine – supra – greutăţile
aşteptate
Greutatea autovehicul neîncărcat + 2 manechine + greutatea bagajelor
Greutatea autovehicul neîncărcat + 2 manechine
Greutatea autovehicul neîncărcat + 2 manechine + greutatea bagajelor
Greutatea autovehicul neîncărcat + 2 manechine + greutatea bagajelor
Condiţii de reţinere pentru centuri Specificate Nespecificate Specificate Specificate Specificate
Manechine utilizate Hybrid II sau Hybrid III Hybrid III Hybrid III Hybrid III Hybrid III
Cap HIC (36 msec) < 1000 HIC (36 msec) ≤ 1000 HIC (HPC) ≤ 1000
Acceleraţia ≤ 80 G pe o perioadă de 3 msec
Acceleraţia ≤ 80 G (Vârful valorii) Cereri alternative sunt specificate
pentru airbaguri instalate în scaune *HIC (15 msec) ≤ 700
HIC (36 msec) ≤ 1000 În caz de necontact sunt aplicabile
cerinţe alternative *HIC (15 msec) ≤ 700
*Extensia gâtului ≤ 3,3 kN
Gât Nespecificate
(Numai pentru teste pe sanie) Momentul de compresiune lateral ≤
190 Nm Momentul de extensie din lateral ≤ 57
Nm Forţa de extensie ≤ 3,3 kN
Încărcarea de compresiune ≤ 4,0 kN Încărcarea de forfecare ≤ 3,1 kN
Încărcarea ≤ 3,3 kN (0 msec), 2,9 kN (35 msec), 1,1 kN (60 msec)
Forţa de forfecare ≤ 3,1 kN (0 msec), 1,5 kN (25-35 msec), 1,1 kN (45 msec) Momentul de extensie lateral ≤ 57 Nm
Nespecificate Nespecificate
Torace Acceleraţia ≤ 60 G Acceleraţia ≤ 60 G Deplasarea ≤ 3 inches (76,2 mm)
Vietza la torace ≤ 1,0 m/s (V*C – Viscous Criterion)
Deplasarea ≤ 50 mm
Deplasarea ≤ 50 mm (Autoturisme) Deplasarea ≤ 60 mm (Camioane)
Deceleraţia ≤ 60 G Deplasarea ≤ 3 inches (76,2 mm)
Femur 1000 daN sau mai puţin 2250 Lbs (1000 daN) sau mai puţin Încărcarea ≤ 9,07 kN (0 msec), 7,56 kN (10 msec) 1000 daN sau mai puţin 1000 daN sau mai puţin
Genunchi Nespecificate Nespecificate Alunecarea spre înainte a încheieturii genunchiului ≤ 15 mm Nespecificate Nespecificate
Criterii de
vătămare
Gambă Nespecificate Nespecificate
TCFC ≤ 8 kN (Criteriul de performanţă al compresiei tibiei)
Indexul tibiei ≤ 1 (= M/Mc+F/Fc)< Fc = 35.9 kN - Forţa de compresiune
critică; Mc = 225 Nm - Momentul de îndoire critic
Nespecificate Nespecificate

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
238
Tabelul 9.3 Japonia Regulamente de siguranţă japoneze,
Articolul 18 paragraful 3 USA FMVSS 214 Europa ECE/96/27
Categoria de aplicare; Data aplicării
Automobile, camioane (SRP < 700 mm); Nou tip Oct. 98 – continuat cu vehicule noi Sept. 2000
Automobile: Sept. 93 – 10%, sept. 96 – 100% Camioane Sept. 98 -
M1, N1 (R point < 700 mm) Nou tip oct. 98 -, aplicare din Oct. 2003
Tipul coliziunii
Coliziune laterală la 90˚
Unghi de 27˚ înclinare pe sanie coliziune normală
Coliziune laterală la 90˚
Viteza de impact 50 km/h 33,5 MPH (54 km/h) 50 km/h
Greutatea autovehiculului testat
Greutatea autovehicul neîncărcat + 100 kg ( 1 manechin şi instrumentele de testare)
Greutatea autovehicul neîncărcat + 2 manechine + greutatea bagajelor
Greutatea autovehicul neîncărcat + 100 kg ( 1 manechin şi instrumentele de testare)
Manechine utilizate Eurosid 1 SID Eurosid 1 Cap HIC (HPC) < 1000 HIC (36 msec) < 1000 HIC (HPC) < 1000
Torace RDC < 42 mm Criteriul de performanţă al deplasării toracelui
TTI < 85 G (Automobile 4D) TTI < 90 G (Automobile 2D) TTI < 85 G (autocamioane)
Vietza la torace ≤ 1,0 m/s (V*C – Viscous Criterion) RDC < 42 mm, 5 G
Pelvis RSPF < 6 kN Criteriul de performanţă al forţei pe pelvis Acceleraţia laterală < 130 G RSPF < 6 kN
Criterii de
vătămare
Abdomen APF < 2.5 kN Criteriul de performanţă al forţei pe abdomen Nespecificate APF < 2.5 kN
ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
239
9.3 Verificarea rezistenţei structurii autovehiculului
9.3.1 Condiţii tehnice impuse autovehiculelor în cazul coliziunilor frontale Întrucât deformaţiile vehiculelor după încercările de coliziune frontală cât şi nivelul
de menţinere a sănătăţii persoanelor rănite în cadrul criteriilor de performanţă aferente impactului pot furniza indicii asupra vitezelor şi traiectoriilor momentele accidentelor, s-a considerat utilă prezentarea în continuare a câtorva prescripţii tehnice impuse în momentul de faţă.
Încercările se fac pe o pistă betonată, suficient de lungă, pentru a permite vehiculului atingerea, în regim stabilizat, a unei viteze cuprinsă între 48,3 km/ şi 56 km/h. Pentru aceasta autovehiculul poate folosi motorul propriu, dar în mod obişnuit el este tractat cu un cablu a cărui acţiune încetează pe ultimii metri dinaintea locului impactului, pentru a nu influenţa rezultatele măsurătorilor. Coliziunea are loc cu suprafaţa unui bloc de beton cu masa de cel puţin 70000 kg, bine ancorat pe sol, numit curent, barieră fixă. Suprafaţa de impact, perpendiculară pe direcţia de înaintare a autovehiculului, are lăţimea de 3 m şi înălţimea de 1,5 m; de regulă suprafaţa este acoperită cu plăci de placaj cu grosimea de 20 mm, iar între acestea şi beton se prevăd plăci din tablă de oţel.
Autovehiculul trebuie echipat cu toate elementele componente, ca în starea de exploatare normală, dar fără încărcătură. Dacă este tractat cu cablu, instalaţia de alimentare se umple în proporţie de 90% cu un lichid neinflamabil, cu masa specifică echivalentă cu a combustibilului; dacă este propulsat de motorul propriu, se face plinul cu combustibil în aceeaşi proporţie de 90% a rezervorului.
Pentru măsurarea vitezei se folosesc înregistratoare cu o precizie de 1%. Având în vedere costul ridicat al acestei probe cât şi numărul lor redus pe perioada unui an, concomitent se efectuează şi alte încercări care au cu totul alte scopuri, aşa că aparatura de măsură utilizată este deosebit de complexă şi necesită o pregătire prealabilă pretenţioasă şi de durată.
După coliziune se execută măsurători în cadrul cărora este admisă o compresiune pe direcţia de măsurare cu o forţă de cel mult 100 N aplicată pe o suprafaţă de 5 cm x 5 cm.
Într-o primă serie de măsurători se consideră două plane transversale verticale, dintre care unul trece prin punctul R (mijlocul articulaţiei coxo-femurale a manechinului 3D aşezat pe scaun) iar celălalt prin proeminenţa din habitaclu aflată cea mai în spate în raport cu suprafaţa tabloului de bord. Se impune ca pe o lăţime de câte 150 mm de o parte şi de alta a planului longitudinal care trece prin centrul scaunului, distanţa între planele menţionate să nu fie sub 450 mm; aceste măsurători se fac pentru fiecare loc de pe scaunele din faţă.
Alte măsurători, legate tot de scaunele din faţă, au în vedere trasarea, înainte de coliziune, a liniei de intersecţie a planului longitudinal care trece prin centrul scaunului considerat cu planul orizontal care conţine centrul pedalei frânei de serviciu în stare de repaus. Se măsoară distanţa, pe această dreaptă, între punctele ei de intersecţie cu partea din faţă a habitaclului şi cu planul transversal vertical care trece prin punctul R. După coliziune, această distanţă nu trebuie să scadă sub 650 mm.
Înainte de încercări, se consideră o dreaptă orizontală transversală care trece prin centrul pedalei frânei de serviciu în stare de repaus şi se determină punctele de intersecţie ale acesteia cu pereţii laterali care delimitează amplasamentul picioarelor. După impact se măsoară distanţa dintre două plane longitudinale care trec prin aceste

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
240
puncte; pentru fiecare loc de pe scaunele din faţă se impune o distanţă de cel puţin 250 mm.
Înainte de coliziune se măsoară distanţa dintre podea şi plafon de-a lungul unei drepte verticale care trece prin punctul R şi este situată în planul longitudinal care cuprinde centrul scaunului. Aceeaşi distanţă măsurată după impact nu trebuie să se micşoreze cu mai mult de 10%.
După coliziune se mai impun următoarele condiţii:
nici o componentă rigidă din interiorul habitaclului nu trebuie să prezinte un risc de rănire gravă pentru ocupanţi (să nu aibă suprafeţe ascuţite sau tăioase);
uşile laterale nu trebuie să se deschidă în perioada impactului; să existe posibilitatea deschiderii unui număr suficient de uşi pentru evacuarea
pasagerilor, fără a se face apel la scule sau la mijloace de descarcerare.
9.3.2 Comportarea structurii autovehiculului şi protecţia ocupanţilor în situaţia coliziunii laterale
Ca şi în cazul precedent, efectele coliziunii laterale se analizează sub aspectele
comportării structurii vehiculului şi al protecţiei ocupanţilor. Prescripţiile tehnice se aplică deocamdată numai acelor vehicule din categoriile MI şi NI, la care punctul R obţinut pentru reglajul scaunului în poziţia cea mai de jos, este situat la o înălţime, faţă de sol, mai mică sau egală cu 700 mm.
Încercarea de coliziune laterală constă în lovirea autovehiculului (staţionat) în partea laterală cu o barieră mobilă având masa de 950 ± 20 kg şi amplasată pe un cărucior cu ampatamentul de 3000 mm. Suprafaţa de impact a barierei este deformabilă (fagure din aluminiu) şi are o lăţime de 1500 mm şi o înălţime de 500 mm. Bariera mobilă se deplasează pe o traiectorie perpendiculară pe planul longitudinal median al autovehiculului; planul longitudinal median al barierei mobile trebuie să coincidă, în cadrul unor distanţe de ±25 mm cu planul transversal ce trece prin punctul R al, scaunului din faţă, de pe partea laterală unde are loc lovirea. Pista de încercare, acoperită cu îmbrăcăminte dură, trebuie să aibă o lungime suficient de mare pentru a permite atingerea unei viteze stabile a căruciorului de 50 ± 1 km/h; înaintea impactului cu această viteză trebuie între-ruptă legătura de tractare a căruciorului.
Vehiculul care se încearcă trebuie să fie dotat cu tot echipamentul interior care poate influenţa măsurătorile. Rezervorul de combustibil trebuie să fie umplut cu apă în proporţie de 80%.
Manechinul are o construcţie specială, impusă de procedura de încercare şi manevrare în situaţia unei coliziuni laterale; el trebuie fixat cu centura de siguranţă şi aşezat pe scaun într-o poziţie medie de reglaj a acestuia. In interiorul manechinului se prevăd traductoare pentru măsurarea:
acceleraţiilor centrului capului pe cele trei direcţii ortogonale X, Y şi Z; deformării cavităţii toracice în trei puncte; forţelor în bazinul manechinului în două locuri; forţelor din abdomenul manechinului.
În mod obişnuit coliziunea se efectuează pe partea laterală a conducătorului auto. Prescripţiile tehnice impuse comportării structurii la coliziune laterală sunt aproximativ similare cu cele referitoare la coliziunea frontală. Se impune în primul rând ca nici o uşă să nu se deschidă în timpul încercării. După impact trebuie să fie posibile următoarele operaţii, fără a întrebuinţa scule speciale:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
241
deschiderea unui număr suficient de uşi pentru evacuarea tuturor ocupanţilor; să se elibereze manechinul din centura de siguranţă; să se scoată manechinul din vehicul; nu trebuie să apară vârfuri sau muchii ascuţite care să sporească riscul rănirilor; pierderile de lichid de înlocuire sau combustibil nu trebuie să depăşească 30
grame/minut. Referitor la protecţia ocupanţilor se impun criterii de performanţă la nivelul capului,
toracelui, abdomenului şi articulaţiei pubiene.
9.4 Încercări de coliziune ale cabinelor utilitare efectuate prin metoda pendulului
9.4.1 Încercarea la impact frontal (încercarea A) Pendulul va fi din oţel, cu masa uniform repartizată: masa sa va fi de 1500 kg ± 250
kg. Suprafaţa de lovire dreptunghiulară şi plană, va avea 2500 mm în lăţime şi 800 mm în înălţime. Muchiile pendulului vor fi rotunjite cu o rază de curbura de cel puţin 15 mm.
Asamblarea pendulului trebuie să fie o construcţie rigidă. Pendulul va fi suspendat liber prin două tije fixate rigid pe pendul şi distanţate cu cel puţin 1000 mm. Tijele vor avea lungimea minimă de 3500 mm, măsurată între axa de suspendare şi centrul geometric al pendulului, figura 9.2.
Pendulul va fi poziţionat astfel încât, în poziţie verticală, faţa sa frontală să fie în contact cu partea cea mai avansată a vehiculului; centrul său de masă să fie situat la 150 mm sub punctul R şi la maxim 1400 mm deasupra solului; centrul său de masă sa fie situat în planul longitudinal de simetrie al vehiculului.
Pendulul va lovi cabina din faţă înspre spate. Direcţia de impact va fi orizontală şi paralelă cu planul longitudinal de simetrie al vehiculului. Energia de impact va fi de 3000 kgfm pentru vehiculele cu o masă totală autorizată care nu depăşeşte 7000 kg şi de 4500 kgfm pentru cele cu o masă totală autorizată depăşind această valoare.
9.4.2 Rezistenţa acoperişului (încercarea B) Acoperişul cabinei trebuie să reziste la o sarcină statică corespunzând unei mase
maxime pentru axa (axele) faţă a vehiculului de maxim de 10 tone. Această sarcină va fi
Fig. 9.2. Schema procedeului de testare prin metoda pendulului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
242
repartizată uniform pe toate elementele portante ale structurii acoperişului cabinei sau ale compartimentului conducătorului, cu ajutorul unui suport rigid de formă corespunzătoare.
9.4.3 Rezistenţa peretelui din spate (încercarea C) Peretele din spate al cabinei trebuie să reziste la o sarcina statică de 200 kg pe
tona de sarcina utilă autorizată. Această sarcină va fi aplicată cu ajutorul unei plăci rigide, perpendiculară pe axa longitudinală de simetrie a vehiculului, acoperind cel puţin toată suprafaţa din spate a cabinei, situată deasupra lonjeroanelor şi deplasându-se paralel cu aceasta axă.
9.5 Prescripţii privind fixarea autovehiculelor pe bancul de încercări Încercarea A se va efectua pe o cabină montată pe un vehicul în felul următor, vezi
figura 9.3: Fiecare lanţ sau cablu de ancorare trebuie să fie din oţel şi să poată rezista la o
forţă de tracţiune de cel puţin 100 kN. Lonjeroanele şasiului se aşează pe blocuri de lemn, pe toată lăţimea lor şi pe o
lungime de cel puţin 150 mm. Partea din faţă a blocurilor nu trebuie să fie mai avansată decât extremitatea din spate a cabinei, nici mai în spate decât mijlocul ampatamentului. La cererea producătorului, şasiul va fi aşezat în poziţia corespunzătoare celei pe care o ocupă la sarcină plină. Mişcarea de recul a şasiului se limitează cu ajutorul lanţurilor sau al cablurilor A, fixate în faţa şasiului şi, simetric în raport cu axa longitudinală, distanţa între punctele de fixare fiind de cel puţin 800 mm. După tensionare, lanţurile sau cablurile trebuie să formeze cu planul orizontal un unghi de cel mult 25º în jos, iar proiecţia lor pe un plan orizontal trebuie să formeze un unghi de cel mult 10º în raport cu axa longitudinală a vehiculului. Lanţurile sau cablurile se pot încrucişa.
Mişcarea laterală este limitată de lanţurile sau cablurile B, fixate în mod simetric pe saşiu în raport cu axa sa longitudinală. Punctele de fixare pe saşiu trebuie să se afle la cel mult 5 m şi la cel puţin 3 m de faţa vehiculului. După tensionare, lanţurile şi cablurile trebuie să formeze cu planul orizontal un unghi de cel mult 20º în jos, iar proiecţia lor pe un plan orizontal trebuie să formeze un unghi de cel puţin 25º şi de cel mult 45º în raport cu axa longitudinală a vehiculului.
Lanţul sau cablul C este mai întâi tensionat cu o sarcină aproximativa de 100 kgf. Se întind apoi cele 4 lanţuri sau cabluri A şi B şi se supune lanţul sau cablul C la un efort de tracţiune de cel puţin 1000 kgf. Unghiul format de acest lanţ sau acest cablu cu planul orizontal nu poate depăşi 15º. O forţă verticală de blocare de cel puţin 50 kgf trebuie aplicată în punctul O între saşiu şi sol.
La cererea producătorului, încercarea poate fi efectuată cu cabina montată pe un cadru special, cu condiţia de a se aduce dovada că acest montaj reproduce pe cel existent pe vehicul.
Se vor lua măsuri pentru ca vehiculul să nu se deplaseze în mod sensibil în timpul încercării. În acest scop, se va acţiona frâna de mână, se va cupla o treaptă de viteză, la roţile din faţă se montează cale de blocare.
Deformarea diferitelor elemente ale suspensiei (arcuri, pneuri etc.) se elimină cu ajutorul unor piese rigide.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
243
Trebuie luate masuri pentru ca, în timpul încercării, cadrul sa nu se deplaseze în mod sensibil.
9.6 Metode de determinare a punctului ‘H’ şi a unghiului real de înclinare a spătarului şi verificarea relaţiilor cu punctul ‘R’ pentru înclinarea spătarului
Punctul ‘H’, care caracterizează poziţia în habitaclu a unui ocupant în poziţia aşezat
este proiecţia, pe un plan longitudinal, a axei teoretice de rotaţie a picioarelor faţă de toracele unui corp omenesc, reprezentat de manechinul descris mai jos.
Punctul ‘R’, sau ‘punct de referinţă al locului pe scaun’ este punctul de referinţă indicat de constructor, care are coordonate determinate în raport cu structura vehiculului. El corespunde poziţiei teoretice a articulaţiei bazinului (punct ‘H’) pentru poziţia, de conducere sau de folosire normală, cea mai joasă şi cea mai din spate dată fiecăruia din scaunele prevăzute de către producătorul vehiculului.
„Unghiul de înclinare a spătarului” este înclinarea spătarului faţă de verticală. „Unghiul real de înclinare al spătarului” este unghiul format de verticala care trece
prin punctul H şi linia de referinţă a toracelui corpului uman, reprezentat de manechinul descris în paragrafele următoare.
„Unghiul prevăzut de înclinare a spătarului” este unghiul prevăzut de producător, care determină înclinarea spătarului pentru poziţia, de conducere sau de folosire normală, cea mai de jos şi cea mai din spate data fiecăruia din scaune de către producătorul vehiculului. El este format de punctul ’R’ cu verticala şi linia de referinţă a toracelui şi corespunde, teoretic, unghiului real de înclinare.
Fig. 9.3. Ancorarea autovehiculului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
244
9.6.1 Determinarea punctelor ‘H’ şi a unghiurilor reale de înclinare a spătarelor
Se vor determina un punct ‘H’ şi un ‘unghi real de înclinare al spătarului’ pentru
fiecare loc pe scaun, prevăzut de către producător. Atunci când scaunele situate pe acelaşi rând pot fi considerate similare (bancheta,
scaune identice etc.), nu se va determina decât un singur punct ‘H’ şi un singur ‘unghiul real de înclinare a spătarului’ pe un rând de scaune, pe un loc considerat reprezentativ pentru rândul respectiv. Acest loc va fi:
pentru rândul din faţă, scaunul conducătorului; pentru rândul/rândurile din spate, un loc situat spre exterior.
Pentru fiecare determinare a punctului ‘H’ şi a ‘unghiului real de înclinare a spătarului’, scaunul considerat se va plasa în poziţia, de conducere sau de folosire normală, cea mai de jos şi cea mai din spate prevăzută pentru acest scaun de către producător. Spătarul, dacă are înclinarea reglabila, este blocat aşa cum este specificat de către producător sau, în lipsa specificării, în aşa fel încât unghiul real de înclinare sa fie cât mai aproape de 25º.
9.7 Caracteristicile manechinelor utilizate pentru determinarea punctelor ‘R’ şi ‘H’
Se va folosi un manechin tridimensional a cărui masă şi contur sunt cele ale unui
adult de talie mijlocie. Acest manechin este reprezentat în figura 9.4 şi figura 9.5. şi cuprinde:
două elemente care simulează unul spatele şi celalalt şezutul corpului, articulate intr-o axă care reprezintă axa de rotaţie între bust şi coapse. Proiecţia acestei axe pe latura manechinului este punctul ’H’ al manechinului;
două elemente simulând gambele şi articulate în raport cu elementul simulând şezutul;
două elemente simulând labele picioarelor, legate de picioare prin două articulaţii simulând gleznele;
în plus, un element simulând şezutul este prevăzut cu o nivelă care permite controlul înclinării sale în sens transversal. Masele, reprezentând masa fiecărui element al corpului, sunt situate în puncte
adecvate, constituind centrele de greutate corespunzătoare, pentru a realiza o masă totală a manechinului de aproximativ 76,6 kg. Detalii pentru diferite mase sunt date în tabelul din figura 9.5.
Linia de referinţă a toracelui manechinului este luată în consideraţie printr-o dreaptă trecând prin punctul de articulaţie al piciorului de bazin şi punctul de articulaţie teoretică a gâtului pe torace vezi figura 9.4.
9.7.1 Poziţia manechinului
Instalarea manechinului tridimensional se efectuează în modul următor: Se plasează vehiculul pe un plan orizontal şi se reglează scaunele după cum este
indicat anterior;

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
245
Se acoperă scaunul pentru încercări cu o pânză pentru a uşura instalarea corectă a manechinului;
Se aşează manechinul pe locul pentru încercări, axele articulaţiilor sale fiind perpendiculare pe planul longitudinal de simetrie al vehiculului;
Labele picioarelor manechinului în felul următor: Pentru locurile din faţă, în aşa fel încât nivela care permite controlul înclinării şezutului în sens transversal sa fie adusă la orizontală;
Pentru locurile din spate, labele picioarelor sunt aşezate în aşa fel încât sa fie, în măsura posibilităţilor, în contact cu scaunele din faţă.
În cazul în care labele picioarelor se sprijină pe niveluri diferite ale podelei, laba piciorului care ajunge prima în contact cu scaunul din faţă serveşte ca referinţă, iar cealaltă labă a piciorului este aşezată în aşa fel încât nivela care permite controlul înclinării transversale a şezutului sa fie adusa la orizontală;
Daca punctul ‘H’ se determină pe un loc median, labele picioarelor sunt plasate de o parte şi de cealaltă a tunelului;
Se aşează masele pe coapse, se aduce la orizontală nivela transversală a şezutului şi se aşează masele pe elementul care reprezintă şezutul;
Se îndepărtează manechinul de spătarul scaunului folosind bara de articulaţie a genunchilor şi aducând spatele spre înainte. Se repune manechinul la loc pe scaun
Fig. 9.4. Elementele constructive ale manechinului tridimensional.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
246
lăsând ca şezutul sa alunece spre spate până ce va întâmpina rezistenţă, apoi se va rabate, din nou, spre înapoi spatele pe spătarul scaunului;
Se va aplica de doua ori o forţă orizontală de cca. 10 daN ± 1daN (10 kgf ± 1 kgf) pe manechin. Direcţia şi punctul de aplicare a forţei sunt reprezentate printr-o săgeată neagră pe figura 9.5;
Se plasează masele sub laturile stânga şi dreapta apoi masele bustului. Se menţine la orizontală nivela transversală a manechinului.
Menţinând nivela transversală a manechinului la orizontală, se aduce spatele spre înainte până ce masele bustului vor fi deasupra punctului ‘H’, astfel se va anula orice frecare pe spătarul scaunului;
Se aduce uşor spatele spre înapoi, pentru a se termina instalarea sa. Nivela transversală a manechinului trebuie să fie orizontală, în caz contrar, se va
proceda din nou aşa cum este indicat mai sus; Dacă există elemente ale vehiculului care împiedică instalarea manechinului
tridimensional, este permisă deplasarea sau demontarea lor.
Fig. 9.5. Dimensiunile şi masele manechinului.
.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
247
9.8 Scenarii de încercare şi aparatura de măsurare privind siguranţa pasivă exterioară
Încercările au fost efectuate în Laboratorul de Securitate Pasivă al S.C. Automobile
Dacia – Renault S.A. Piteşti. Pentru definirea încercărilor s-au considerat ca reprezentative pentru cazul accidentelor pieton – automobil următoarele două situaţii:
Pieton în poziţie laterală (traversând strada), automobil frânând; Pieton în poziţie cu faţa spre autoturism.
Viteza autoturismului în momentul impactului a fost de aproximativ 30 km/h. O
schemă a amplasării aparaturii şi a locului de producere a impactului este prezentată în figura 9.6. Pentru efectuarea încercărilor s-a folosit următoarea aparatură:
Fig. 9.6. Schema impactului dintre autoturism şi pieton.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
248
Manechin pieton conform descrierii din capitolele anterioare. În cadrul Laboratorului Dacia-Renault a fost montat un cap de la un manechin de tipul Hybrid II fabricaţie First Technology USA;
Autoturism Dacia Nova pregătit pentru coliziune şi echipat cu două biomanechine humanoide Hybrid II First technology USA;
Sistem de frânare îmbarcat în autoturism; Instalaţie de tracţiune pentru autoturisme Messring Gmbh Germania (pista coliziune,
instalaţie tracţiune, cablu tracţiune, cărucior tracţiune autoturisme, amortizor deblocare cărucior tracţiune, sistem deblocare pene conice, blocare cablu tracţiune);
Sistem de iluminare pentru filmare rapidă (1000 img/sec); Camere filmare rapidă 1000 img/sec STARLEX USA şi sistem electronic de
sincronizare a startării simultane sau decalate a camerelor de filmare rapidă; Sistem de măsurare a vitezei autoturismului Tag Heuer – Elveţia; Două fotocelule de startare automată a camerelor le filmare, una pentru sistemul de
înregistrare din instalaţia de achiziţionare date la coliziune şi una, semnal trigger pentru magnetofon;
Cabluri Bendix pentru achiziţie date la coliziune; Două accelerometre triaxiale Bell Howell USA tip 4-204-0001; Instalaţie achiziţie date la coliziune Bell Howell USA; Softuri pentru analiza şi prelucrarea semnalelor şi imaginilor filmate la 1000 img/sec; Surse de alimentare şi accesorii specifice încercărilor de coliziune.
9.8.1 Poziţia manechinului
Manechinul pieton a fost modificat în Laboratorul Securitate Pasivă Piteşti prin adăugarea unui cap de biomanechin Hybrid II instrumentat cu un accelerometru Bell & Howell tip 4-204-0001 montat în centrul de greutate. În vederea unei mai bune fixări a
Fig. 9.7. Planele anatomice ale corpului:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
249
capului manechinului s-au făcut modificări pentru prinderea acestuia în trei puncte situate pe umeri, respectiv coloana vertebrală. Pentru măsurarea acceleraţiilor la nivelul toracelui, pe coloana vertebrală a manechinului s-a montat un al doilea accelerometru de acelaşi tip. Accelerometrele au fost montate cu axele paralele cu cele trei plane anatomice ale corpului (coronal, sagital şi transversal), vezi figura 9.7. Axele X şi Y pe care s-au înregistrat acceleraţiile sunt conţinute în planele sagital, respectiv coronal, iar axele Z sunt paralele la planul transversal.
9.8.2 Pregătirea autoturismului Autoturismul utilizat a fost marca Dacia Nova. Acesta a fost lestat la o greutate de
1024 kg, cu rezervorul de combustibil gol. Partea din faţă, respectiv capota au fost vopsite pentru a se diferenţia zonele cu potenţiale diferite de vătămare a pietonului şi pentru a facilita analizele de imagine cu softul FALCON Germania. În autoturism au fost montate două manechine Hybrid II Fyrst Technology USA.
În portbagaj a fost montat un sistem special de frânare cu declanşare electrică prin cablu. Scopul a fost de a declanşa frânarea autoturismului în momentul impactului cu manechinul pieton, şi evitarea distrugerii lui prin impactul cu bariera fixă de coliziune (170 tone + bloc mecano - sudat pentru coliziune decalat) aflată la circa 15 metri de zona de impact.
9.8.3 Instalaţia de tracţiune pentru autovehiculele supuse coliziunilor Această instalaţie este fabricată de firma Messring Gmbh Germania. Instalaţia
poate tracta autovehicule cu masa maxima de 2 tone la o viteza maxima de 150 km/h cu o precizie de ± 1 km/h şi cu acceleraţii cuprinse intre 2 şi 10 m/s2. Ea se compune din următoarele subansamble şi instalaţii:
Fig. 9.8. Cântărirea autoturismului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
250
Pista de coliziune cu o lungime de 200 m, care permite coliziuni auto cu bariere fixe (zid), cu bariere mobile (1100 kg şi 1800 kg), autoturism cu autoturism (2 în mişcare sau unul stând pe loc), coliziune laterală, coliziune laterală autoturism cu bariera copac, răsturnări autoturism.
Unitatea de acumulare a energiei pneumo-hidraulică cu servovalvă de comandă controlată prin calculator, butelii azot, acumulatoare cu piston, motor hidraulic de acţionare şi motor electric.
Unitatea de antrenare a autoturismului compusă din: cablu de tracţiune (fără sfârşit) 400 m, cărucior tracţiune autoturisme, canal rulare cărucior, amortizor deblocare cărucior tracţiune, sistem deblocare pene conice.
Unitatea electronică de comandă care permite introducerea mărimilor definitorii pentru tracţiune (viteza, timpul de accelerare, timp de mers uniform şi timpul de frânare). Unitatea permite startarea din camera de achiziţie a datelor la coliziune, memorarea parametrilor tracţiunii şi oprirea în caz de urgentă.
9.8.4 Filmarea rapidă şi sisteme speciale de iluminare Pentru analiza coliziunilor manechin pieton s-au folosit două camere de filmare
rapide STARLEX USA reglate pentru o viteza de 1000 img/sec. Aceste camere au fost poziţionate pentru filmarea de tip: vedere de sus şi din lateral stânga.
Gradul de iluminare necesar a fost obţinut prin montarea a 30 lămpi cu becuri Osram de 1 kw fiecare. S-au montat 20 lămpi în poziţie laterală şi 10 lămpi pentru iluminare de sus.
Startarea camerelor se face cu instalaţii speciale de sincronizare şi startare simultană. Ţinând cont că rola de film Kodak color utilizată are 30 m, iar camera are nevoie de un timp de accelerare, se va obţine un timp efectiv de filmare de cca 1,5 sec.
Fig. 9.9. Instalaţia de frânare îmbarcată pe autoturism.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
251
O manevră nesincronizată duce la pierderea fenomenelor dorite a se studia la viteze ridicate. Camerele utilizate permit viteze de filmare de până la 10000 img/sec, dar aceasta presupune fenomene foarte rapide şi iluminări deosebite.
Fig. 9.10. Camerele de filmare de mare viteză şi fotocelulele Tag Heuer.
Fig. 9.11. Poziţionarea fotocelulelor Tag Heuer şi aparatura de startare automată.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
252
9.8.5 Măsurarea vitezei autoturismului Viteza autoturismului a fost măsurată cu un vitezometru cu fotocelule electrice Tag
Heuer fabricat în Elveţia. Precizia de măsurare este de 0,1%, distanţa între cele două fotocelule fiind de 1 m.
9.8.6 Instalaţia de achiziţie de date la coliziune Instalaţia de achiziţie de date la coliziune este de construcţie Bell & Howell USA. Ea
dispune de 56 canale de măsură cu posibilitate de analiză pe trei căi:
vizualizare grosieră pe VU-metre cu leduri care indică eventualele defecţiuni pe canale;
înregistratoare ultrarapide cu ultraviolete; înregistrare numerică pe magnetofon special cu 56 piste.
Instalaţia este formată din 3 blocuri constructive care conţin: Condiţionere, amplificatoare, filtre SAE, vizualizare grosiera; Module conversie şi deconversie analog/numeric, magnetofon;
Fig. 9.12. Aparatura pentru achiziţia datelor experimentale.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
253
Blocuri automatizare startare coliziune, protecţii şi avertizoare avarii, înregistrator ultraviolete. În utilizarea semnalelor înregistrate de magnetofon se utilizează aparate gen lupa
de timp, coroborate cu reducerea severă a turaţiei magnetofonului. Pentru efectuarea testelor, manechinul “pieton” a fost instrumentat cu două
accelerometre triaxiale tip 4 – 204 – 0001 fabricat de Bell & Howell – USA. Un accelerometru (seria 1956) s-a montat în centrul de greutate al capului (capul
manechinului HYBRID II) iar al doilea (seria 1914) s-a montat în centrul cutiei toracice a manechinului pieton. Deceleraţiile care apar în momentul impactului autoturismului cu manechinul sunt măsurate pe cele trei direcţii ale sistemului de referinţă considerat (pentru vehicul XX’, YY’, ZZ’).
Legăturile electrice între accelerometre şi instalaţia de achiziţie de date, codificarea şi înregistrarea s-au făcut prin cablu care conţine 10 canale de transmisie independente.
Momentul impactului cu vehiculul s-a marcat prin contact electric montat la nivelul genunchiului manechinului.
Viteza vehiculului înainte de impact s-a măsurat cu ajutorul instalaţiilor timp – viteza Tag - Heuer Elveţia direct în km/h.
Nivelul maxim al deceleraţiilor măsurate în cap (după axele x, y, z). a fost în domeniul 0 ± 200 g iar nivelul maxim al deceleraţiilor măsurate în cutia toracică (după axele x, y, z) a fost în domeniul 0 ± 100 g.
Fiecare canal de filtrare corespunzător fiecărui canal de măsură a fost reglat astfel:
Pentru deceleraţiile măsurate în cap – domeniul de frecvenţă s-a reglat între 0 – 1000 Hz (corespunzător frecvenţei de tăiere de 1650 Hz la – 3 dB);
Pentru deceleraţiile măsurate în cavitatea toracică domeniul a fost de 0 – 180 Hz (frecvenţa de tăiere corespunzătoare de 300 Hz la – 3 dB).
Înregistrarea deceleraţiilor (măsurate, amplificate şi filtrate) s-a făcut la nivelul de 0± 5 V pentru 0 ± 200 g – cap, respectiv 0 ± 5 V pentru 0 ± 100 g – torace, pe hârtie fotosensibilă cu aparatul oscilograf cu raze ultraviolete tip 5 – 139 - Bell & Howell –
Fig. 9.13. Accelerometrul triaxial Bell & Howell montat în capul pietonului.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
254
USA precum şi pe bandă magnetică cu magnetofon tip 4020 A Bell & Howell – USA, prelucrate digital de un sistem PCM (procesare în cod).
Domeniul de măsură reglat pentru fiecare canal al oscilografului a fost de 0± 5 V = 0 ± 50 mm = 0± 200 g pentru deceleraţiile din cap şi 0 ± 5 V = 0 ± 50 mm = 0 ± 100 g pentru deceleraţiile din cutia toracică. Canale de măsură au fost: 1. Prim contact; 2. Deceleraţie cap axa – X; 3.
Deceleraţia cap axa – Y; 4. Deceleraţia cap axa – Z; 5. Deceleraţia torace axa – X; 6. Deceleraţia torace axa – Y; 7. Deceleraţia torace axa – Z.
9.9 Desfăşurarea testelor şi analiza rezultatelor După pregătirea aparaturii necesare s-au desfăşurat două experimente, după
scenariile prezentate anterior. În cadrul primului test pietonul a fost aşezat în faţa autovehiculului, în poziţia
"traversând strada”, cu piciorul stâng înspre autoturism. Impactul a avut loc în regiunea genunchiului stâng, puţin deasupra acestuia. Viteza autoturismului în momentul impactului a fost de 29,58 km/h, autovehiculul lovind pietonul cu zona mediană a barei paraşoc. Acţionarea asupra sistemului de frânare s-a făcut cu 2 m înainte de locul coliziunii.
La al doilea test pietonul a fost aşezat cu faţa spre autoturism, el fiind lovit frontal de zona mediană a barei paraşoc a autoturismului care se deplasa în regim uniform cu viteza de 30,21 km/h. Impactul asupra pietonului a avut loc în regiunea genunchilor.
În urma efectuării testelor, pentru obţinerea în format electronic ale diagramelor acceleraţiilor la nivelul toracelui şi capului manechinului, rezultatele, obţinute pe hârtia de oscilograf au fost scanate în format “Black and White Drawing” şi salvate ca fişiere în format Windows Bitmap Monocrome.
În etapa următoare cu ajutorul softurilor de analiză s-a făcut o digitizare a fişierelor
care conţin graficele acceleraţiilor. Pentru aceasta s-au executat următorii paşi: Setarea originii reprezentării şi a limitelor superioare a axelor X şi Y; Captura punctelor de pe imaginea scanată. Programul permite achiziţionarea a
maximum 1000 de puncte de pe imagine. Digitizarea se poate face în mod automat sau semiautomat, prin indicarea de către utilizator a zonei care se doreşte a fi digitizată;
Scrierea bazei de date; Importarea bazei de date într-un program specializat în reprezentări grafice; Reprezentarea grafică a valorilor conţinute în baza de date.
Din analiza diagramelor obţinute s-a constatat că pentru viteza de impact de 30
km/h durata coliziunii efective dintre pieton şi automobil este de aproximativ 250 ms, după aceasta pietonul căzând pe carosabil. Impactul în regiunea membrelor inferioare ale pietonului durează aproximativ 90 ms. Timpul după care pietonul se loveşte cu capul de parbriz este de aproximativ 190 ms.
La ambele probe pietonul a fost proiectat cu capul în parbrizul autoturismului. De asemenea membrele inferioare s-au rupt în zona de contact cu bara paraşoc. În timpul celui de al doilea test manechinul s-a rupt din articulaţia bazinului. Acest lucru s-a datorat reglajului momentului din articulaţie, moment care a depăşit valoarea la care s-a produs ruperea articulaţiei în zona de sudură. Acceleraţiile medii înregistrate, din

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
255
momentul impactului în zona genunchiului, până la izbirea pietonului cu capul în parbriz şi pe durata impactului secundar, cu solul, sunt centralizate în tabelul 9.4.
Forţa medie de impact asupra manechinului a fost în cazul primului test de aproximativ 5300 N. La căderea de pe autoturism pe sol, se remarcă din graficul acceleraţiilor, manechinul nu a lovit solul cu capul ci doar s-a rostogolit pe acesta în urma mişcării de rotaţie imprimată la impactul în zona picioarelor. Acceleraţiile apărute în cazul impactului secundar sunt mai mici decât la coliziunea directă cu autoturismul.
Acceleraţiile mai mari apărute la testul numărul doi se datorează ruperii manechinului din articulaţia bazinului.
În urma efectuării experimentelor, atât la prima cât şi la cea de-a doua probă, avariile provocate de pieton autoturismului au fost importante doar în regiunea parbrizului. Pe capotă s-au înregistrat doar urme de ştergere. Bara paraşoc nu a suferit deformaţii.
Analizând înregistrările filmate şi diagramele se poate afirma că impactul cuprinde trei faze principale:
Contactul cu autoturismul, durează din momentul impactului până când pietonul se desprinde de autoturism;
Faza de zbor, din momentul separării pietonului de autoturism până la impactul cu solul;
Faza de târâre, din momentul luării contact cu solul, până la poziţia finală a pietonului.
Tabelul 9.4
Acceleraţiile medii înregistrate la nivelul capului şi toracelui manechinului Impact primar Impact secundar Test nr
Cap Torace Cap Torace [g] [g] [g] [g] 1 7,525 7,338 5,78 5,137 2 10,81 10,994 10,92 8,344
9.9.1 Contactul cu autoturismul Această fază cuprinde o serie de sub-faze, datorită complexităţii fenomenelor care
apar: Impactul primar cu lovirea pietonului la nivelul genunchiului; Rezemarea pietonului cu femurul de muchia capotei, simultan cu rabaterea părţii
superioare a corpului pe capota autoturismului; Rotirea corpului pietonului în jurul axei sale longitudinale; Impactul capului pietonului cu parbrizul; Căderea de pe autoturism.
La impactul primar pietonul este lovit la nivelul genunchiului de către bara paraşoc a autoturismului. Deoarece în cazul prezentat autoturismul a fost frânat doar cu puntea spate nu s-a observat o mişcare de tangaj a acestuia în momentul frânării. După un timp foarte scurt muchia capotei vine în contact cu femurul pietonului.
Tot aici se poate vedea fenomenul de “mulare” a membrelor inferioare pe partea frontală a autoturismului. Acesta se datorează mobilităţii articulaţilor membrelor inferioare sau, în cazurile nefericite datorită fracturării oaselor. Partea inferioară a piciorului, până la genunchi, tinde să fie trasă sub autovehicul dar datorită diferenţei de

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
256
masă dintre această regiune şi restul corpului în final se va produce fenomenul de “mulare”. În faza de tragere a picioarelor sub autoturism sunt posibile apariţii ale fracturilor de gleznă.
Rabaterea pietonului pe capotă începe cu o oarecare întârziere, faţă de momentul impactului.
Mişcarea de rotaţie a pietonului în jurul axei sale longitudinale ia naştere datorită poziţiei piciorului manechinului care este lovit prima dată de bara paraşoc. Punctul de aplicaţie al forţei de impact este excentric faţă de axa longitudinală a pietonului şi astfel
Fig. 9.15. Mişcarea de rotaţie a pietonului .
Fig. 9.14. Impactul primar .

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
257
apare un moment de rotaţie. Rotaţia începe cu o oarecare întârziere, aceasta datorându-se distribuţiei masei pietonului pe picioare.
La rabaterea pietonului pe capota autoturismului rotaţia are loc în jurul punctului de contact dintre capotă şi femur. În momentul când pietonul se loveşte cu capul de parbriz, deoarece partea superioară a corpului este mai grea decât picioarele, pentru un timp corpul şi capul pietonului devin corp comun cu autoturismul, iar picioarele se rotesc în jurul articulaţiei bazinului, datorită mişcării imprimate la impactul primar.
Desprinderea de autoturism, în cazul vitezelor de impact mici, se manifestă în general prin căderea în lateral sau prin alunecarea de pe capotă, după ce autoturismul s-a oprit. În primul caz viteza pietonului în momentul desprinderii de autoturism este egală cu viteza autoturismului.
9.9.2 Faza de zbor
După ce pietonul s-a desprins de autoturism, până la impactul secundar, va descrie prin aer o traiectorie parabolică. În cazul prezentat această fază este aproape inexistentă, datorită vitezei mici de coliziune. Faze de zbor apar doar la viteze de peste 40 km/h.
9.9.3 Faza de târâre
Odată ajuns pe sol pietonul se va rostogoli şi va aluneca, poziţia finală fiind complet aleatoare. Contactul cu solul se poate face cu oricare dintre părţile corpului. S-a constatat că în urma impactului secundar, cu solul, pietonul nu a atins carosabilul cu capul ci doar cu toracele şi membrele inferiore, rostogolindu-se pe acesta.
9.10 Concluzii
În urma înregistrărilor, din diagramele acceleraţiilor şi filmările efectuate, rezultă:
Forţa maximă la impactul dintre bara paraşoc a autoturismului şi pieton apare după un timp de aproximativ 25 de ms, efectul acesteia fiind ruperea piciorului manechinului.
Valoarea forţei la nivelul genunchiului în acest caz a fost de ordinul a 10000 N. Acceleraţia maximă înregistrată a fost în momentul lovirii manechinului cu capul de
parbrizul autoturismului, la 190 ms de la impactul primar. Valoarea acceleraţiei la nivelul capului în acest caz a depăşit 100 g. La nivelul toracelui valoarea medie a acceleraţiei înregistrate pe o perioadă de 20
ms a fost de aproximativ 18 g şi a avut loc la impactul secundar, cu solul. Distanţa de proiectare a pietonului în cazul primului test a fost 7,5 m pe direcţia de
deplasare a autoturismului, valoare care se încadrează în limitele stabilite de Kuhnel.
Avariile suferite de autoturism, la coliziunea cu pietonul s-au materializat prin urme de ştergere în zona superioară a capotei şi prin spargerea parbrizului.
Deşi la primul test pietonul a fost lovit cu centrul barei paraşoc, datorită mişcării de rotaţie imprimată acesta a căzut de pe autovehicul prin laterala dreaptă, fapt confirmat şi de urmele lăsate pe capotă.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
258
Autoturism marca: DACIA NOVA R 523
Masa gol [kg] 827 Repartiţie faţă / spate [kg] 442/385 Masa echipat [kg] 1024 Repartiţie faţă / spate [kg] 530/494 Ampatament [mm] 2475 Viteza de desfăşurare a testului: 29,58 km/h Regimul de deplasare: frânare
Direcţia de deplasare a autoturismului Rectilinie, a lovit din lateral pietonul pe partea stângă, de-a lungul axei Y a acestuia din urmă.
Punctul de impact Observaţii
Bară protecţie Median la 510 mm faţă de sol Nu a suferit nici o deformaţie
Capota Zona frontală, aria centrală a capotei şi cea capotă parbriz Zgârieturi minore
Aripi - - Echipamente
supuse deformării Parbriz Dreapta la 250 mm de linia
mediană şi de muchia superioară Spart dar nu s-a deplasat de pe cheder
Ora de desfăşurare: 1723
*(Se vor nota date despre autoturism) Autoturismul a fost frânat doar cu puntea spate. Presiunea gazului în buteliile de azot 12,8 bar. Timpul scurs până la atingerea forţei nominale de frânare a fost de 0,51 sec. Distanţa parcursă de autovehicul în acest timp: 4,20 m. Lungimea urmelor de frânare a fost 7,25 m. Spaţiul total parcurs de autovehicul până la oprire a fost 11,45 m.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
259
Manechin antropometric RUTY 1
Segmentul de corp Înălţimea [cm] Masa [kg] Capul + gâtul 26 5 Corpul + mâinile 58 40 Picioarele 96 28 Total ansamblu 180 73
Direcţia de lovire A fost lovit lateral pe partea stângă, de-a lungul axei Y
Acceleraţia maximă Viteza unghiulară Segmentul de corp Articulaţia
Momentul din
articulaţie
Număr de mase
manechin X Y Z X Y Z Observaţii
- - [Nm] - [g] [g] [g] [rad/s] [rad/s] [rad/s] -
Capul Gât Adaptare cap
biomanechin HYBRID II
95 40 88 Sunt grupate în
intervalul 195 – 220 ms
Şold 1 (flexie, extensie)
2 x 50
Şold 2 (lateral) 50 Umăr 2 x 9
Corpul
Braţ 2 x 9
16 12 12
Nu sunt grupate
in jurul unui anumit interval
Femur superior 2 x 15 Picioare Genunchi 2 x 50
11
- - - Nu s-au făcut măsurători
*(Se vor nota distanţele de aruncare ale pietonului) Pietonul a fost lovit în zona genunchiului stâng, după care a fost proiectat cu capul în parbrizul autoturismului. Piciorul stâng s-a rupt deasupra articulaţiei genunchiului. În urma impactului secundar pietonul a ajuns cu capul înspre direcţia de deplasare a autovehiculului, în laterala deraptă a acestuia, respectiv la 1,1 m (măsurat la şold) faţă de linia mediană a autoturismului şi 7 m (măsurat la şold) faţă de punctul de unde s-a produs

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
260
Acceleraţiile capului obţinute în urma impactului primar asupra genunchiului
Acceleraţiile capului obţinute în urma impactului cu parbrizul autoturismului
Acceleratiile capului la impactul primar
-200
-160
-120
-80
-40
0
40
80
120
160
200
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250
Timpul [ms]
Acc
eler
atia
(g)
Acceleratia pe axa X
Acceleratia pe axa Y
Acceleratia pe axa Z
Acceleratia rezultanta

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
261
Acceleraţiile toracelui obţinute în urma impactului primar asupra genunchiului
Acceleraţiile toracelui obţinute în urma impactului dintre capul pietonului şi parbrizul autoturismului
Acceleratiile toracelui la impactul primar
-100
-80
-60
-40
-20
0
20
40
60
80
100
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220 230 240 250
Timpul [ms]
Acc
eler
atia
(g)
Acceleratia pe axa X
Acceleratia pe axa Y
Acceleratia pe axa Z
Acceleratia rezultanta

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
262
Acceleraţiile capului în momentul când pietonul a căzut de pe autoturism şi a atins solul
Acceleraţiile capului în momentul când pietonul se rostogoleşte pe carosabil
Acceleratiile capului la impactul secundar
-200
-160
-120
-80
-40
0
40
80
120
160
200
810 820 830 840 850 860 870 880 890 900 910 920 930 940 950 960 970 980 990 1000 1010
Timpul [ms]
Acc
eler
atia
(g)
Acceleratia pe axa X
Acceleratia pe axa Y
Acceleratia pe axa Z
Acceleratia rezultanta

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
263
10 PRELUCRAREA ŞI INTERPRETAREA REZULTATELOR ÎNCERCĂRILOR
10.1 Generalităţi Prelucrarea matematică a datelor experimentale, analiza şi interpretarea lor
constituie o problemă importantă pentru toţi specialiştii care lucrează în cercetarea experimentală. Utilizarea metodelor numerice moderne de prelucrare şi analiză a rezultatelor are următoarele scopuri principale:
Punerea rezultatelor sub o formă cât mai utilă şi accesibilă specialiştilor care urmează să le folosească ulterior;
Estimarea adevăratelor valori ale mărimilor măsurate, a erorilor de măsurare şi a preciziei măsurării. Prin urmare, calitatea rezultatelor obţinute în urma cercetărilor experimentale este
influenţată şi de volumul de date, precizia mijloacelor de măsurare utilizate şi de modul în care a fost efectuată prelucrarea datelor.
10.2 Precizia şi erorile de măsurare În practică, nici o determinare experimentală nu poate fi efectuată absolut exact,
deoarece în mod obligatoriu aceasta este afectată de erori, datorită: Variaţiei în timp a fenomenului măsurat; Unor imperfecţiuni a organelor de simţ; Aparaturii şi metodelor de măsurare; Condiţiilor de măsurare; etc.
Perfecţionarea aparaturii şi a metodicii de lucru poate conduce la obţinerea unor aproximări mai exacte, însă trebuie menţionat faptul că există totuşi o limită până la care pot fi micşorate erorile măsurare. Cu cât precizia de măsurare este mai mare cu atât dificultatea şi costurile experimentului sunt mai mari. Ca urmare a acestui lucru decurge necesitatea ca pentru fiecare experiment să fie impusă precizia optimă, care în mod uzual este prezentată în standardele, normele, regulamentele de încercare, sau în lucrările de specialitate.
Prin eroarea de măsurare ∆x se înţelege diferenţa dintre valoarea măsurată x şi adevărata valoare a parametreului a, fiind exprimată matematic prin relaţia:
axx ii −=Δ ( 10.1) unde i=1,2,.....,n este indicele măsurării în cadrul a n măsurări efectuate. Una dintre problemele principale ale prelucrării numerice a datelor obţinute pe cale
experimentală este estimarea adevăratelor valori ale mărimilor obţinute în urma cercetării experimentale. Este un fapt cunoscut că măsurătorile în cadrul cercetării experimentale se repetă pentru a putea estima valoarea reală a. Spre exemplu pentru procesul de rulare liberă, efectuat pe un drum orizonta, cu configuraţie rectilinie, din asfalt de calitate bună, în următoarele condiţii: viteză iniţială 15 km/h; viteză finală 10 km/h; viteza vântului mai mică de 3 m/s, rezultatele privind timpul de rulare liberă au

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
264
fost obţinute în urma a 84 de probe effectuate (42 pe sens de depasare). Aceste sunt centralizate în tabelul 10.1. Timpul a fost măsurat cu un cronometru digital cu precizie de 0,01 s. Se poate observa că timpul de rulare liberă, variază între 10,38 s şi 10,60 s, iar valoarea medie a timpului de rulare liberă pentru cele 84 de probe este 10,496 s.
Tabelul 10.1
Nr. probei 1 2 3 4 5 6 7 8 9 10 11 12 Timpul de rulare liberă [s]
10,56 10,49 10,57 14,48 10,56 10,45 10,49 10,60 10,45 10,48 10,45 10,51
Nr. probei 13 14 15 16 17 18 19 20 21 22 23 24 Timpul de rulare liberă [s]
10,49 10,51 10,48 10,50 10,51 10,45 10,51 10,56 10,49 10,49 10,43 10,44
Nr. probei 25 26 27 28 29 30 31 31 33 34 35 36 Timpul de rulare liberă [s]
10,53 10,43 10,58 10,49 10,52 10,44 10,49 10,50 10,43 10,51 10,50 10,42
Nr. probei 37 38 39 40 41 42 43 44 45 46 47 48 Timpul de rulare liberă [s]
10,44 10,42 10,54 10,54 10,44 10,47 10,46 10,47 10,54 10,47 10,55 10,48
Nr. probei 49 50 51 52 53 54 55 56 57 58 59 60 Timpul de rulare liberă [s]
10,54 10,46 10,51 10,49 10,44 10,42 10,46 10,48 10,42 10,52 10,57 10,51
Nr. probei 61 62 63 64 65 66 67 68 69 70 71 72 Timpul de rulare liberă [s]
10,53 10,57 10,39 10,42 10,57 10,48 10,56 10,54 10,57 10,52 10,54 10,49
Nr. probei 73 74 75 76 77 78 79 80 81 82 83 84 Timpul de rulare liberă [s]
10,55 10,56 10,60 10,48 10,38 10,50 10,47 10,43 10,48 10,59 10,46 10,54
Întrebările care se pun în urma acestor încercări repetate sunt:
Cât de apropiată este valoarea medie 10,496 s de valoarea reală? Influenţează numărul de probe acurateţea valorii medii? Domeniul de variaţie al valorilor măsurare, afectează valoarea medie?
Răspunsul la aceste întrebări poate fi găsit studiind cauzele erorilor de măsurare, modalităţile de estimare a acestora şi modalităţile de reducere a acestora.
10.2.1 Clasificarea erorilor de măsurare
Clasificarea erorilor de măsurare este prezentată schematic în figura 10.1. La
efectuarea măsurătorilor pot apare următoarele tipuri de erori: grosolane; sistematice; aleatoare.
Erorile grosolane apar datorită calificării necorespunzătoare, experienţei insuficiente
sau/şi neatenţiei personalului . Ca exemple pentru aceste erori pot fi amintite: Citirea pe altă scală a instrumentelor cu scări multiple; Selecţia greşită a factorului de amplificare; Aprecierea poziţiei acului indicator faţă de reperele scării.
Erorile grosolane sunt relativ uşor de identificat prin repetarea măsurătorilor. Într-un set de date obţinute pe cale experimentală, valorile ce onţin erori grosolane se situează

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
265
la limitele domeniului. În mod obişnuit aceste valori se elimină în cadrul prelucrărilor încercărilor experimentale.
Erorile sistematice sunt consecinţa unor factori cunoscuţi ca: instrumentul de măsură; metoda de măsurare; mărimile cu influenţă minoră; condiţiile de mediu exterior; regimul desfăşurării experimentului.
Experienţa şi atenţia experimentatorului este adesea utilizată pentru eliminarea acestui tip de eroare. Un exemplu de eroare sistematică este folosirea unui termometru digital calibrat greşit, care la temperatura de îngheţ a apei pure indică 1oC, iar la fierberea acesteia 101oC. Prin etalonarea greşită a termometrului respectiv i s-a indus o eroare sistematică de + 1oC, constantă pe tot domeniul de măsurare de la 0oC la 100oC.
Un alt exemplu de eroare sistematică referitor tot la măsurarea temperaturilor poate fi datorat etalonării greşite în sensul că la transformarea apei pure în gheţă indică 0oC, iar la fierberea ei 101oC. Prin etalonarea greşită termometrului respectiv i s-a indus o eroare sistematică crescătoare de la 0oC, pentru o temperatură de 0oC, până la +1oC, pentru temperatura de 100oC. Prin urmare la o temperatură de 30oC, eroarea sistematică va fi de +0,3oC.
Tot o eroare sistematică apare şi în cazul nerespectării condiţiilor iniţiale şi finale ale experimentului de rulare liberă prezentat mai sus. Dacă datorită calibrării greşite a
Fig. 10.1. Clasificarea erorilor de măsurare.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
266
dispozitivului de măsurare a vitezei autovehiculului, experimentul începe la 14 km/h în loc de 15 km/h, valorile timpilor de rulare vor fi diminuate.
Erorile sistematice pot crea probleme serioase în munca de cercetare experimentală, deoarece sunt foarte greu de depistat. Acest tip de erori nu pot fi eliminate prin repetarea experimentului şi medierea rezultatelor obţinute. Spre exemplu eroarea constată de +1oC poate să nu fie detectată o lungă perioadă de timp până la următoarea calibrare a instrumentului de măsură, la fel şi eroare de -1 km/h, a instrumentului de măsură a vitezei.
În cazul în care valoarea rezultatelor poate fi estimată prin calcul pe cale teoretică şi se constată diferenţe între rezultatele experimentale şi cele teoretice se verifică etalonarea întregului lanţ de măsură, pentru a depista eventualele erori sistematice. În majoritatea cazurilor, valoare reală ce urmează să fie măsurată nu se cunoaşte, motiv pentru care detectarea şi eliminarea erorilor sistematice se face destul de greu.
Erorile aleatoare sunt consecinţa unor factori imposibil de evaluat aprioric, iar erorile din această categorie se distribuie potrivit unei legi statistice. Analiza erorilor aleatoare stabileşte împrăştierea rezultatelor. Dacă revenim la experimentul rulării libere putem identifica următoarele cauze:
eroarea de comandă a conometrului; mici variaţii ale vitezei iniţiale; diferenţa între timpul real şi cel arătat de cronometru, datorită faptului că precizia de
afişare a acestuia este de 0,01 s, iar incrementarea valorii se face din sutime în sutime (eroare maximă – 0,01 s). Cu toate că sunt mai uşor de identificat decât erorile sistematice, erorile aleatoare
nu pot fi eliminate în totalitate, pe când cele grosolane şi sistematice pot. Aceste erori pot fi corectate şi minimizate prin efectuarea mai multor probe pentru determinarea aceleiaşi mărimi urmate de analize statistice a rezultatelor şi de estimarea erorilor. Prin urmare pentru stabilirea preciziei de măsurare sunt prelucrate statistic erorile aleatoare.
Teoria erorilor de măsurare şi metoda celor mai mici patrate sunt strâns legate de teoria probabilităţilor, statistica matematică, teoria informaţiei şi teoria grafurilor. Pe baza teoriei probabilităţilor şi a statisticii matematice se poate studia repartiţia erorilor care are un rol hotărâtor în prelucrarea rezultatelor obţinute prin măsurătoare.
10.3 Noţiuni de teoria probabilităţii Erorile aleatoare de măsurare sunt caracterizate de o lege de repartiţie bine
determinată. Prezenţa unei astfel de legi poate fi stabilită repetând de multe ori, în condiţii identice măsurarea unei anumite mărimi şi considerând numărul m de rezultate ale măsurătorilor care se încadrează într-un anumit interval. Raportul dintre acest număr şi numărul n al tuturor măsurătorilor efectuate se apropie de o valoare constantă, pentru un număr suficient de mare de probe, reprezentând frecvenţa relativă de încadrare a mărimii în intervalul (clasa) considerat.
Repetând măsurarea unei variabile, ca în cazul determinării timpului de rulare liberă a autovehiculului, se constată că valorile măsurate sunt distribuite în jurul valorii medii, aşa cum rezultă din figura 10.2. În această figură este reprentat numărul de apariţii în fiecare interval (clasă), spre exemplu pentru clasa a 2-a corespunzătoare intervalului

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
267
10,401 – 10,420 s se constato 5 apariţii din 84, deci o frecvenţă relativă de 5,95%. De asemenea se constată că în zona valori medii 10,496 s, frecvenţa de apariţie este mai ridicată, astfel:
În intervalul 10,461 – 10,480 sunt 12 apariţii, corespunzătoare unei frecvenţe relative de 14,29%;
În intervalul 10,481 – 10,500 sunt 13 apariţii, corespunzătoare unei frecvenţe relative de 15,48%;
În intervalul 10,501 – 10,520 sunt 10 apariţii, corespunzătoare unei frecvenţe relative de 11,90%. În mod obişnuit, repartiţia erorilor aleatoare de măsurare se face după o legea
normală (legea lui Gauss). În figura 10.3, este prezentată frecvenţa de distribuţie pentru o creştere progresivă
a numărului de probe de rulare liberă, sunt redate grafic rezultatele pentru primele 24 de probe, pentru primele 48 de probe, respectiv pentru cele 84 de probe efectuate. Dacă proba s-ar repeta de o infinitate de ori repartiţia datelor se face după o lege normală, cu cât creşte numărul de probe frecvenţa de distribuţie se apropie din ce în ce mai mult de distribuţia teoretică.
Se pune problema de ce este necesar să se aproximeze frecvenţa de distribuţie cu o distribuţie teoretică. În practică s-a recurs la utilizarea distribuţiei teoretice, deoarece analiza statistică poate fi aplicată mult mai uşor pe această distribuţie. În afară de distribuţia normală (Gaussiană), în practica prelucrării datelor experimentale mai sunt utilizate distribuţia binomială şi distribuţia Poisson.
Densitatea de repartiţie a legii normale este dată de relaţia:
Fig. 10.2. Distribuţia timpului de rulare liberă pentru cele 84 de probe.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
268
( ) 2
2
21 σ
πσ
x
exp−
⋅⋅⋅
= ( 10.2)
unde: σ (σ>0) este eroarea medie pătratică, sau eroarea standard; σ2 – dispersia măsurotorilor.
Legea normală de repartiţie se determină pornind de la următoarele ipoteze:
Erorile de măsurare pot avea un şir neîntrerupt de valori;
La un număr mare de măsurări, erorile de aceiaşi mărime cu semne diferite au aceiaşi frecvenţă de apariţie;
Odată cu creşterea erorii se micşorează frecvenţa de apariţie. În figura 10.4 este
reprezentată curba de repartiţie a legii normale pentru diferite valori ale erorii standard σ (σ=1/2, σ=1 şi σ=2). Din acest grafic se observă că atunci când
Fig. 10.3. Influenţa numărului de probe asupra distribuţiei.
Fig. 10.4.Curbele repartiţiei normale.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
269
σ scade curba de repartiţie intersectează axa probabilităţii p(x) într-un punct din ce în ce mai îndepărtat de origine. Cu ajutorul acestui grafic se poate stabili cât de frecvent pot apărea erorile aleatoare.
10.4 Prelucrarea statistică a datelor experimentale Prelucrarea statistică a rezultatelor experimentale presupune folosirea unor valor
tipice de selecţie ca: media aritmetică; media ponderată; mediana; moda; etc.
10.4.1 Media aritmetică Media aritmetică a unui grup de n valori (x1, x2, ......., xn) se calculează cu relaţia:
∑=
⋅=+++
=n
ii
nmed x
nnxxx
x1
21 1....... ( 10.3)
unde: xmed este media aritmetică; i – indicele măsurării; n – numărul de repetări a probei.
În cazul rulării libere, din exemplul considerat mai sus valoarea medie a celor 84 de
probe este de 10, 496 s. Un număr mai mare de probe conferă o precizie mai ridicată, şi o valoare medie mai apropiată de cea adevărată. Spre exemplu:
Pentru prima probă, valoarea medie este 10,56 s; Pentru primele 6 probe, valoarea medie este 10,518 s; Pentru primele 12 probe, valoarea medie este 10,508 s; Pentru primele 48 probe, valoarea medie este 10,492 s; Pentru cele 84 probe, valoarea medie este 10,496 s.
Se observă că valoarea 10,496 s corespunzătoare mediei celor 84 de probe este
cea mai apropiată de valoarea adevărată a probei, iar valorile 10, 56 s obţinute în prima probă şi 10,518 s, obţinute pentru primele 6 probe sunt cele mai depărtate de aceasta.
10.4.2 Media ponderată
În cazul prelucrării rezultatelor măsurătorilor de precizii diferite şe foloseşte media
ponderată care este definită de relaţia:
∑
∑=
=
=
=− =
+++++
= ki
ii
ki
iii
k
kkpmed
p
xp
pppxpxpxp
x
1
1
21
2211
..................... ( 10.4)
Abaterea medie pătratică ponderată este dată de relaţia:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
270
( ) ( ) ( )
∑
∑
=
=−
−−−
=+++
−++−= k
ii
k
ipmedii
k
pmedkkpmedp
p
xxp
pppxxpxxp
S
1
1
2
21
2211
......................
( 10.5)
unde p1, p2, ......, pk sunt ponderile măsurătorilor x1, x2,......,xk, presupuse cunoscute şi care sunt invers proporţionale cu dispersiile erorilor corespunzătoare, σ1
2, σ22, ......, σk
2.
10.4.3 Mediana Mediana este acea valoare a variabilei aleatoare care împarte întregul şir de
rezultate dispuse în ordine crescătoare sau descrescătoare în două părţi egale şi caracterizează seria de date prelucrate din punc de vedere al repartiţiei frecvenţei în cadrul seriei.
10.4.4 Moda
Prin modă se înţelege valoarea de repartiţie căreia îi corespunde frecvenţa maximă
de apariţie. În anumite cazuri repartiţia de frecvenţe poate avea două valori de frecvenţe, ambele fiind cele mai probabile, repartiţii numite bimodale. În cazul în care aceiaşi frecvenţă de repartiţie are mai multe mode, repartiţia respectivă poartă numele de repartiţie plurimodală. În cazul în care repartiţia de frecvenţe are în mijlocul ei în loc de maxim un minim, aceasta se numeşte antimodală. La fel ca mediana, moda reprezintă o valoare medie de poziţi sau de structură, iar în cazul distribuţiilor simetrice aceasta este egală cu media aritmetică.
10.4.5 Probabilitatea şi intervalul de încredere
În cazul în care valoarea adevărată a unei măsurători este x, media aritmetică este
xmed, şi eroarea de măsurare ∆x, se poate presupune că α este probabilitatea că rezultatul măsurării se deosebeşte de valoarea adevărată cu o mărime mai mare decât ∆x, lucru care se poate scrie sub forma:
( ) α=Δ+<<Δ− xxxxxP medmed ( 10.6) Probabilitatea α se numeşte probabilitate de încredere sau coeficient de siguranţă,
iar intervalul valorilor de la xmed-∆x, până la xmed+∆x se numeşte interval de încredere. În relaţia 10.6, considerând o probabilitate α, rezultatul măsurătorii nu iese din
limitele intervalului de încredere. La măsurători obişnuite se recomandă ca α=0,9...0,95 iar pentru cele extrem de importante α=0,999.
10.4.6 Abaterea medie pătratică
O întrebare importantă care se pune în practica cercetării experimentale este “Cât
de apropiată este valoarea medie de valoare adevărată?”. Răspunsul la această

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
271
întrebare îl aflăm calculând abaterea medie pătratică a valorii individuale s, şi abaterea medie pătratică a valorii medii Sm.
Valoarea adevărată a aparţine domeniului xmed±Sm. Precizia valorilor individuale este caracterizată de valoarea medie pătratică a
valorilor individiuale:
( )∑=
−−
=n
imedi xx
ns
1
2
11 , ( 10.7)
iar precizia şirului de măsurători efectuate asupra aceleiaşi mărimi (în aceleaşi condiţii), este caracterizată de valoarea medie pătratică a valorii medii:
( )∑=
−−
=−
=n
imedim xx
nnsS
1
2
11
1 ( 10.8)
Această valoare este cunoscută sub denumirea de abatere medie pătratică a valorii medii Sm, care poate fi folosită pentru a estima eroarea standard a valorii medii. Pentru exemplul considerat Sm=0,0055 s pentru cele 84 probe, Sm=0,0066 s pentru primele 48 de probe, Sm=0,0157 s pentru primele 12 probe, Sm=0,0229 s pentru primele 6 probe. Rezultă că:
xmed=10,518 ± 0,0229 s pentru primele 6 probe; xmed=10,508 ± 0,0157 s pentru primele 12 probe; xmed=10,492 ± 0,0066 s pentru primele 48 probe; xmed=10,496 ± 0,0055 s pentru cele 84 de probe.
Prin urmare din cele prezentate mai sus rezultă o abaterea medie pătratică a valorii medii este cu atât mai mică cu cât numărul probelor scade.
Dacă dacă de probe este foarte mare, se obţine abaterea standard definită prin următoarea relaţie:
( ) ( ) ( )
( )∑=
−=
=−+−+−
=
n
imedi
mednmedmed
xxn
nxxxxxx
1
2
222
21
1
.................σ
( 10.9)
Pentru un număr mai mare de probe abaterea medie pătratică a valorilor idividuale s tide să fie egală cu σ. Spre exemplu pentru cele 84 probe ale testului de rulare liberă rezultă:
σ=± 0,0497 şi s=± 0,0500 Abaterea medie pătratică este măsura împrăştierii valorilor în cadrul unei probe
care se repetă. O abatere a mediei pătratice mare indică o împrăştiere mare a rezultatelor.
Exemplificând pentru cazul rulării libere, abaterea medie a valorilor individuale are următoarele valori:
s=0,0518 s pentru primele 6 probe; s=0,0522 s pentru primele 12 probe; s=0,0453 s pentru primele 48 probe; s=0,0500 s pentru toate cele 84 probe.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
272
Cu cât creşte numărul de probe împrăştierea scade, stabilizându-se la o valoare constantă.
Un mod de apreciere a valorii optime a abaterii medii pătratice individuale, este compararea acesteia cu valoarea medie, prin coeficientul de variaţie cv:
[ ]% 100⋅=med
v xsc ( 10.10)
O valoare mare a acestui coeficient arată o împrăştiere ridicată a rezultatelor obţinute.
10.5 Calculul erorilor compuse În cazul încercărilor, unele mărimi ca viteza unghiulară, momentul se măsoară şi
debitul, etc., şi pornind de la acestea se calculează alte mărimi cum este puterea, consumul specific, etc. O problemă importantă este stabilirea erorii totale pornind de la erorile parţiale, utilizând legi de compunere specifice a erorilor de măsură.
Să presupunem că dorim să cunoaştem perimetrul P, al unui poligon de încercare a autovehiculelor, acesta se calculează cu relaţia:
medmedmedmed DCBAP +++= ( 10.11) unde: Amed, Bmed, Cmed şi Dmed sunt valorile medii ale laturilor obţinute în urma a n măsurări. Corespunzător acestora se pot calcula abaterile medii pătrate ale valorilor medii pentru fiecare latură: Sm,A, Sm,B, Sm,C, Sm,D. Probelma care trebuie rezolvată este stabilirea abaterii medii pătrate a valorii medii a perimetrului Sm,P, pornind de la abaterile medii pătrate ale laturilor. 10.5.1 Calculul erororilor în cazul compunerii prin însumare
Dacă variabila compusă este definită ca sumă: ............++= medmed YXZ ( 10.12)
în care: Xmed este valoare medie a parametrului X, calculată în baza a n măsurări X1, X2, ........., Xn; Ymed - valoare medie a parametrului Y, calculată în baza a n măsurări Y1, Y2, ........., Yn.
Abaterea medie pătratică a şirului compus va fi dată de relaţia: ...............2
,2
,, ++= YmXmZm SSS ( 10.13) Relaţia 10.13 este valabilă şi pentru o variabilă compusă de forma:
............+++= medmed YXkZ ( 10.14) unde k este o constantă.
Relaţia 10.13 este valabilă şi pentru o variabilă compusă de forma: ............+−= medmed YXZ (10.15)
Pentru exemplificare cosiderăm două incinte alăturate în care se măsoară
temperatura. În prima temperatura este 97±0,5oC, iar în cea de a doua 81±0,4oC. Diferenţa de temperatură dintre cele două incinte va fi: 16±[0,52+0,42]0,5 oC=16±0,64oC.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
273
10.5.2 Calculul erororilor în cazul compunerii prin combinaţii liniare
Dacă variabila compusă este definită ca:
.............++= medmed bYaXZ ( 10.16) atunci abaterea medie pătratică a valorii medii pentru şirul compus se calculează cu relaţia:
...............2,
22,
2, ++= YmXmZm SbSaS ( 10.17)
Relaţia 10.17 este valabilă şi pentru o variabilă compusă de forma: ............+++= medmed bYaXkZ ( 10.18)
unde k este o constantă. Expresia 10.17, rămăne valabilă şi pentru cazul în care o parte din termenii relaţiei
10.18 sunt negativi: .............+−+= medmed bYaXkZ ( 10.19)
Pentru exemplificare se poate considera platforma dreptunghiulară a unui autocamion care are lungimea L=3±0,005 m şi lăţimea l=2±0,004 m. Se impune calculul perimetrului platformei.
Valoarea medie a acestua este: P=2L+2l=10 m. Eroarea standard a perimetrului mediu este: [220,0052+220,0042]0,5=0,013 m Din exemplul prezentat rezultă că valoarea estimată a perimetrului este 10±0,013
m. Un caz particular îl reprezită variabila obţinută prin înmulţirea cu un scalar definită
prin relaţia: medaXZ = ( 10.20)
a cărei abatere medie pătratică a valorii medii este:
XmXmZm aSSaS ,2
,2
, == ( 10.21)
10.5.3 Calculul erororilor în cazul compunerii prin înmulţire Dacă variabila compusă este definită ca:
..............medmedYXZ = ( 10.22)atunci abaterea medie pătratică relativă a valorii medii a şirului compus se calculează cu relaţia:
............2
2,
2
2,, ++=
med
Ym
med
XmZm
YS
XS
ZS
( 10.23)
Pentru exemplificare se conside platforma dreptunghiulară a unui autocamion, care are lungimea L=3±0,005 m şi lăţimea l=2±0,004 m. Se impune calculul suprafeţei platformei.
Valoarea medie a acesteia este: A=Ll=6 m2

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
274
Eroarea relativă standard a mediei ariei este: [0,0052/32+0,0042/22]0,5=0,0026 Prin urmare, eroarea standard reprezintă 0,26% din valoarea medie a ariei de 6 m2,
ceea ce exprimat în unităţi de suprafaţă reprezintă 0,016 m2. Deci aria pletformei poate fi estimată la: 6 m2±0,26% sau 6 m2±0,016 m2.
10.5.4 Calculul erororilor în cazul compunerii prin sumă de puteri Dacă variabila compusă este definită ca:
................++= vmed
umed YXZ (10.24)
atunci abaterea medie pătratică a valorii medii a şirului compus se calculează cu relaţia:
[ ] [ ] .............2,
212,
21, ++= −−
YmvmedXm
umedZm SvYSuXS ( 10.25)
Pentru exemplificare se calculează aria unei încăperi fonice de formă pătrată cu latura L=3±0,005 m în care este montat un stand de încercare motoare.
Aria medie estimată este: A=L2=9 m2 Eroarea standard a ariei estimate este: [(2*31)2 0,0052]=0,03 m2,
iar aria estimată este 9±0,03 m2.
10.5.5 Calculul erororilor în cazul compunerii prin produs de puteri Dacă variabila compusă este definită ca:
................⋅⋅= vmed
umed YXZ ( 10.26)
atunci abaterea medie pătratică relativă a valorii medii a şirului compus se calculează cu relaţia:
...........2
2,2
2
2,2, +⋅+⋅=
med
Ym
med
XmZm
YS
vXS
uZS
( 10.27)
Pentru exemplificare se poate considera consumul spacific de combustibil ce, pentru un motor cu ardere intermă, definit de relaţia:
e
V
e
ee P
QPC
c ⋅== ρ ( 10.28)
unde: Ce este consumul orar de combustibil în [kg/h]; Pe - puterea efectivă a motorului în [kW]; Qv – debitul volumetric al combustibilului în [cm3/h]; r - densitatea combustibilului în [g/cm3].
Pentru determinarea experimentală a consumului specific au fost măsurate următoarele mărimi:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
275
r = 0,81 ± 0,015 g/cm3 Qv = 8521 ± 82 cm3/h Pe = 20 ± 0,3 kW Înlocuind valorile măsurate în relaţia 10.28 şi rezolvând-o rezultă pentru consumul
specific mediu o valoare de 345,1 g/kWh. Aplicând relaţia 10.27, pentru eroarea standard se obţine valoarea:
( ) kWhgSecm
/89,820
3,018521821
81015,011,345 2
22
2
22
2
22
, =⋅−+⋅+⋅⋅=
rezultă că consumul specific de combustibil estimat este de 345,1±8,89 g/kWh sau 345,1 g/kWh ±2,6%.
În cazul în care una dintre erori este preponderentă, influenţând esenţial eroarea totată se impune în principal diminuarea acstei erori pentru a ne încadra în eroarea totală împusă.
10.5.6 Calculul erororilor în cazul funcţiilor logaritmice
Dacă variabila compusă este definită ca:
medXZ log= ( 10.29) atunci abaterea medie pătratică a valorii medii a şirului compus se calculează cu relaţia:
med
XmZm X
SS ,
, = ( 10.30)
10.5.7 Calculul erororilor în cazul funcţiilor de mai multe variabile
În cazul unor funcţii generale de mai multe variabele de forma: ...........,.........( , medmed YXfZ = ( 10.31)
abaterea medie pătratică a valorii medii a funcţiei compuse se calculează cu relaţia:
( )[ ] [ ] ( )[ ] [ ] ....................2,
2'2,
2', ++= YmmedXmmedZm SYfSXfS ( 10.32)
unde:
( ) ( )
( ) ( )medmed
medmedmed
medmed
medmedmed
YZ
YYXf
Yf
XZ
XYXf
Xf
∂∂
=∂
∂=
∂∂
=∂
∂=
,
,
'
'
Se pune condiţia va valiabilele Xmed, Ymed, .......... din funcţia Z=f(Xmed, Ymed, ....) să fie independente unele faţă de cealelalte.
Pentru cazul particular al unei funcţii de forma: medmedYkXZ = ( 10.33)
în care k este o constantă. Derivatele parţiale au următoarea expresie:

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
276
( )
( ) medmed
med
medmed
med
kXYZYf
kYXZXf
=∂∂
=
=∂∂
=
'
'
Relaţia 10.32 devine: [ ] [ ] [ ] [ ] ....................2
,22
,2
, ++= YmmedXmmedZm SkXSkYS ( 10.34) Împărţind ambii termeni ai relaţie 10.34 cu Z se obţine:
[ ] [ ][ ]
[ ] [ ][ ]
....................2
2,
2
2
2,
2, ++=
medmed
Ymmed
medmed
XmmedZm
YkXSkX
YkXSkY
ZS
( 10.35)
Prin simplificarea relaţia 10.35 devine: [ ] [ ]
....................2
2,
2
2,, ++=
med
Ym
med
XmZm
YS
XS
ZS
( 10.36)
Pentru cazul particular al unei funcţii de forma: medmedmedmed QPYXZ −= ( 10.37)
Nu este necesar să se folosească formula generală pentru calculul abetreii medii pătraticve deoarece se pot folosi legile prezentate anterior.
Abaterea medie pătratică a valorii medii pentru primul terman se calculează cu relaţia:
2
2,
2
2,
,med
Ym
med
XmmedmedXYm Y
SXS
YXS += ( 10.38)
În mod similar abaterea medie pătratică a valorii medii pentru cel de al doilea terman se calculează cu relaţia:
2
2,
2
2,
,med
Qm
med
PmmedmedPQm Q
SPS
QPS += ( 10.39)
Cele două abateri pătratice parţiale se compun după legea compunerii prin însumare şi se obţine abaterea medie pătratică a valorii medii pentru funcţia Z:
2,
22,
22,
22,
22,
2,, QmmedPmmedYmmedXmmedPQmXYmZm SPSQSXSYSSS +++=+= ( 10.40)
Se poate confirma acest rezultat utilizând relaţia de compunere pentru funcţii de variabile multiple. Cele patru derivate parţiale fiind:
( ) ( )
( ) ( ) medmed
medmedmed
med
medmed
medmedmed
med
PQZQfQ
PZPf
XYZYfY
XZXf
=∂∂
==∂∂
=
=∂∂
==∂∂
=
''
''
se introduc în relaţia 10. 32 şi se obţine: 2
,22
,22
,22
,2
, QmmedPmmedYmmedXmmedZm SPSQSXSYS +++= ( 10.41), soluţie similară cu 10.40.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
277
11 NORME ŞI REGLEMENTĂRI INTERNE ŞI INTERNAŢIONALE UTILIZATE LA OMOLOGAREA AUTOVEHICULELOR Condiţiile tehnice pe care trebuie să le îndeplinească autovehiculele în vederea
omologării şi admiterii în circulaţie pe drumurile publice din România, RNTR 2, sunt reglementate prin Ordinul Nr. 211 din 11 februarie 2003, publicat în Monitorul Oficial al României, Partea I, nr. 275 din 18 aprilie 2003.
11.1 Prescurtări şi definirea unor termeni utilizati Principalele prescurtări şi definiţii utilizate în domeniul transporturilor şi al omologării
autovehiculelor sunt sistematizate în cele ce urmează: ABS - Sistem automat antiblocare a rotilor la frânare; ASR - Dispozitiv automat antipatinare la demarare sau accelerare; CE - Comunitatea Europeana; CEE - Comunitatea Economica Europeana; Directivă - act normativ al Consiliului/Comisiei sau al Parlamentului European; Directivă de baza (specifica) - directivă care se referă la omologarea unui anumit
sistem al vehiculului (de exemplu sistemul de frânare), sau a unei componente (de exemplu farul), ori a unei entităţi tehnice independente (de exemplu bara antiîmpănare), care poate fi omologată separat de vehicul;
Directivă-cadru - directiva care se referă la omologarea unui tip de vehicul în intregime;
EN - Standard European; EURO – 1 - omologare privind emisiile poluante ale autovehiculelor conform
Directivei 70/220/CEE modificată prin Directiva 96/69/CE treapta A, sau Regulamentului nr. 83 ECE - UN seria de amendamente 02, ori omologarea motoarelor diesel pentru autovehicule, conform Directivei 88/77/CEE modificată prin Directiva 91/542/CEE I, sau Regulamentului nr. 49 ECE - UN seria de amendamente 02 treapta A;
EURO – 2 - omologare privind emisiile poluante ale autovehiculelor conform Directivei 70/220/CEE, modificată prin Directiva 96/69/CE, treapta B, sau Regulamentului nr. 83 ECE -UN seria de amendamente 03, ori omologarea motoarelor diesel pentru autovehicule, conform Directivei 88/77/CEE, modificată prin Directiva 91/542/CEE II, sau Regulamentului nr. 49 ECE - UN seria de amendamente 02 treapta B;
EURO – 3 - omologare privind emisiile poluante ale autovehiculelor conform Directivei 70/220/CEE modificată prin Directiva 98/69/CE, treapta A, sau Regulamentului nr. 83 ECE -UN seria de amendamente 05, ori omologarea motoarelor diesel pentru autovehicule, conform Directivei 88/77/CEE, modificată prin Directiva 1999/96/CE treapta A, sau Regulamentului nr. 49 ECE – UN seria de amendamente 03 treapta A;
EURO – 4 - omologare privind emisiile poluante ale autovehiculelor conform Directivei 70/220/CEE, modificată prin Directiva 98/69/CE treapta B, sau

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
278
Regulamentului nr. 83 ECE - UN seria de amendamente 05 ori omologarea motoarelor diesel pentru autovehicule, Directivei 88/77/CEE modificată prin Directiva 1999/96/CE treapta B(1), sau Regulamentului nr. 49 ECE - UN seria de amendamente 03 treapta B(1);
ISO - Organizaţia Internaţională de Standardizare; Omologare pentru circulaţia pe drumurile publice din România – procedură
administrativa prin care autoritatea competentă certifică, conform legislaţiei în vigoare, că un tip de vehicul, un sistem sau componenta ori o entitate tehnica independentă satisface cerinţele tehnice prevăzute în prezentele reglementări;
Omologare de tip - procedură administrativă prin care autoritatea competentă certifică, conform legislaţiei în vigoare, la cererea constructorului sau a reprezentantului autorizat al acestuia, că un vehicul fabricat sau importat în serie satisface cerinţele tehnice prevăzute pentru acest caz în reglementări;
Omologarea de tip în mai multe etape - procedură administrativă prin care autoritatea competentă certifică, conform legislaţiei în vigoare, la cererea constructorului sau a reprezentantului autorizat al acestuia, că un tip de vehicul incomplet sau completat satisface cerinţele tehnice. Poate fi acordată pentru vehiculul completat, vehiculul de bază (de exemplu şasiu echipat) sau pentru alte trepte intermediare de montaj al vehiculului;
Omologarea de certificare individuală - procedură administrativă prin care autoritatea competentă atestă, conform legislaţiei în vigoare, că un vehicul fabricat sau importat satisface cerinţele tehnice prevăzute pentru acest caz. Ea poate fi acordată în cazul: vehiculelor noi care nu se fabrică în serie (de exemplu, vehiculele montate din piese separate sau produse artizanal), vehiculelor cu destinatii speciale, sau vehiculelor noi importate, care nu au omologare de tip pentru circulatia pe drumurile publice din România; certificării stării tehnice a vehiculelor utilizate, care au mai fost înmatriculate în străinatate; modificării categoriei de încadrare sau a categoriei de folosinţă a vehiculului; înlocuirii tipului de motor prevăzut de constructor cu alt tip; înlocuirii caroseriei şi/sau a şasiului vehiculului; înlocuirii ori modificării unor componente, sisteme sau entităţi tehnice cu altele din afara gamei de echipare originală.
Regulament CEE (CE) - Regulament al Uniunii Europene; Regulament ECE – UN - Regulament anexa la Acordul privind adoptarea de
prescripţii tehnice uniforme aplicabile vehiculelor cu roţi, echipamentelor şi componentelor ce pot fi montate sau utilizate pe vehicule cu roţi şi condiţiile de recunoaştere reciprocă a omologărilor eliberate pe baza acestor prescripţii, încheiat la Geneva la 27 martie 1958;
RE3 ECE - UN - Rezoluţia de ansamblu nr. 3 a Comisiei Economice pentru Europa a ONU;
STAS - standard de stat; SR - standard român; SR ISO - standard român echivalent cu un standard ISO; SR EN - standard român echivalent cu un standard european (EN).

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
279
11.2 Obiectul şi domeniul de aplicare al reglementărilor privind omologarea autovehiculelor
Reglementările privinde omologarea autovehiculelor definesc cerinţele pe care
trebuie să le îndeplinească vehiculele rutiere la omologarea în vederea admiterii în circulaţie pe drumurile publice, sub aspectul siguranţei active şi pasive, protecţiei mediului ambiant şi protecţiei drumurilor publice. Acestea se aplică tuturor categoriilor de vehicule destinate să circule în mod permanent sau ocazional pe drumurile publice şi sunt destinate transportului de persoane şi/sau de mărfuri ori efectuării de servicii sau lucrări.
Sistemele, componentele sau entităţile tehnice independente care concură la siguranţa circulaţiei şi protecţia mediului, precum şi piesele de schimb aferente trebuie să îndeplinească cerinţele specifice împuse, prin reglementări sau prin standarde specifice, pentru a putea fi utilizate la vehiculele autorizate să circule pe drumurile publice.
Admiterea în circulaţie a combinaţiilor de vehicule este condiţionată de asigurarea compatibilităţii dintre autovehiculul tractor şi vehiculul tractat şi de respectarea condiţiilor tehnice specifice fiecăruia dintre aceste vehicule.
Condiţiile tehnice impuse pentru omologarea/certificarea individuală a vehiculelor produse artizanal sau a vehiculelor noi produse în serii mici, în vederea admiterii în circulaţie pe drumurile publice din România sunt similare cu cele utilizate pentru omologarea autovehiculelor produse în serie mare, iar condiţiile tehnice impuse pentru omologarea individuală a vehiculelor utilizate care au fost importate sunt cele care au fost valabile la data omologării de tip a vehiculului respectiv, cu excepţia cazurilor în care reglementările actuale indică cerinţe mai severe, îndeosebi în domeniul protecţiei mediului, sau existenţa unor componente ori echipamente moderne pentru siguranţa rutieră, care pot fi adaptate ţinandu-se seama de construcţia autovehiculului respectiv.
11.3 Proceduri de aplicare a reglementărilor privind omologarea autovehiculelor în România
Regia Autonomă "Registrul Auto Român", denumită în continuare Registrul Auto
Român, certifică încadrarea vehiculelor rutiere în normele de siguranţă a circulaţiei, de protectie a mediului, de protecţie a drumurilor pe care circulă, precum şi incadrarea în categoriile prevăzute de reglementarile în vigoare. În acest scop acordă:
Omologarea de tip pentru circulatia pe drumurile publice din România a vehiculelor rutiere construite în ţară sau importate în serii (cantităţi) mai mari de 10 bucaţi de acelaşi tip pe an;
Omologarea şi certificarea individuală pentru circulaţia pe drumurile publice din România a vehiculelor rutiere: noi, de acelaşi tip, construite în ţară sau importate în serie, care nu depăşesc 10 autovehhicule pe an, vehiculelor unicat; vehiculelor fabricate artizanal sau în serii mici; certificarea stării tehnice a vehiculelor utilizate; înlocuirea caroseriei şi/sau a şasiului vehiculelor care trebuie sa corespundă prevederilor din reglementare valabile pentru omologare; modificarea categoriei de

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
280
încadrare sau a categoriei de folosinţă a vehiculului care trebuie să corespundă prevederilor reglementări valabile pentru omologare; înlocuirea tipului de motor prevăzut de constructor cu alt tip de motor.
Certificarea şi omologarea componentelor şi entitătilor tehnice independente care concură la siguranţa rutieră şi la protecţia mediului şi care pot fi certificate/omologate separat de vehicul;
Certificarea şi omologarea pieselor de schimb şi a materialelor de exploatare, destinate vehiculelor rutiere şi care concură la siguranţa circulaţiei şi protectia mediului, fabricate în condiţiile indicate în reglementările în vigoare;
Atestarea îndeplinirii de către vehiculele rutiere a condiţiilor privind gradul redus de poluare chimica şi sonoră, care urmează să beneficieze de facilităţile acordate de reglementările în vigoare. În scopul asigurării conformităţii produselor fabricate şi comercializate în serie cu
tipul omologat, Registrul Auto Român ca serviciu tehnic notificat asigură urmatoarele: Certificarea managementului sistemului calităţii la producătorul autohton de vehicule
ori componente sau entităţi tehnice independente şi verificarea existenţei unor dispoziţii şi proceduri satisfăcătoare pentru asigurarea unui control eficace, astfel încât vehiculele, echipamentele sau componentele fabricate să corespundă cu tipul omologat;
Atunci când există semnale ca unele tipuri de vehicule nu îşi menţin în exploatare caracteristicile şi performanţele consemnate la omologarea de tip sau individuală, ceea ce poate afecta siguranţa rutieră sau protecţia mediului, Registrul Auto Roman poate efectua probe de anduranţă în condiţii corespunzatoare celor din exploatare sau probe accelerate echivalente, pentru a se face demersurile necesare în vederea restabilirii conformităţii. În conformitate cu Hotararea Guvernului nr. 610/1992 privind cartea de identitate a
vehiculului, publicată în Monitorul Oficial al Romaniei, Partea I, nr. 262 din 21 octombrie 1992, pe baza omologării şi certificării pentru circulaţia pe drumurile publice din România, Registrul Auto Român înscrie în Cartea de identitate a vehiculului datele tehnice şi de identificare ale vehiculului:
Datele de identificare se pot înscrie şi de producator sau de reprezentantul autorizat al acestuia la vehicule omologate ca tip, înserarea altor date decât cele înscrise în Cartea de identitate a vehiculului fiindu-i interzisa producatorului;
Orice modificare adusă vehiculului, care afectează datele tehnice şi de identificare înscrise în cartea de identitate a vehiculului, reclamă reverificarea vehiculului de catre Registrul Auto Român şi reactualizarea cărţii de identitate cu noile date sau, după caz, anularea cărţii de identitate şi eliberarea alteia, după reomologarea vehiculului. De la procedura de certificare si omologare pentru circulatia pe drumurile publice
din Romania sau de la unele prevederi ale prezentelor reglementari pot fi exceptate unele categorii de vehicule cum sunt: bicicletele echipate cu motor electric cu putere nominală de maxim 0,25 kW; remorcile tractate de biciclate cu motor; maşini monoax pentru lucrări (motocultoare, motocositoare şi altele similare), care sunt conduse de

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
281
conducator pedestru; utilajele şi maşinile pentru lucrări agricole sau forestiere, tractate sau purtate pe tractor (pluguri, grape, maşini de semanat şi recoltat, batoze, echipamente de stropit şi altele similare), precum şi alte maşini şi agregate pentru lucrări în diferite domenii (construcţii, industrie), cu condiţia ca masa lor maximă autorizată să nu depaseasca 3,0 tone, iar viteza lor maximă, prin construcţie, să nu depăsească 30 km/h; scaunele rulante pentru persoane cu handicap locomotor; autovehicule de epocă; autovehicule de competiţii; etc.
11.4 Reglementări care se aplică la omologarea de tip, a autovehiculelor şi remorcilor
Prevederile tehnice care se aplică pentru omologarea de tip, a autovehiculelor şi
remorcilor, conform Directivei 70/156/CE, cu ultima modificare prin Directiva 2000/40/CE sunt centralizate în tabelul 11.1. În tabelul 11.2. sunt centralizate alte reglementori utilizate la omologarea de tip a autovehiculelor şi remorcilor.
Prevederile tehnice care se aplică pentru omologarea de tip, a tractoarelor agricole
şi forestiere sunt centralizate în tabelul 11.3. Prevederile tehnice care se aplică pentru omologarea de tip, a autovehiculelor cu
două sau trei roţi, conform Directivei 92/61/CEE, cu ultima modificare prin Directiva 2000/7/CE sunt centralizate în tabelul 11.4

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
282
Tabelul 11.1
Directive ale Uniunii Europene Regulamente
ECE
Categoriile de vehicule la care se aplica Obiectul omologarii
Directiva de baza
CEE (CE)
Ultima modificare
care se aplica
M1 M2 M3 N1 N2 N3 O1 O2 O3 O4
Nr. Regulament ECE - UN
Seria de
amen-
damente/
addenda
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
1. Nivel zgomot 70/157 1999/101 X X X X X X 51 02/1
1.Amortizoare zgomot de înlocuire
70/157 1999/101 X X X X X X 59 00/2
2. Emisii poluante pentru autovehicule M1 si N1
70/220 1999/102 X X X X X X 83 05
3. Rezervoare carburant / bara antiîmpanare spate
70/221 2000/8 X X X X X X X X X X 58 01
4. Placi de înmatriculare spate 70/222 - X X X X X X X X X X - -
5. Echipamente de directie 70/311 1999/7 X X X X X X X X X X 79 01/1
6. Balamale si încuietori pentru usi
70/387 98/90 X X X X X X X X 11 02/1
7. Dispozitivele de semnalizare sonora
70/388 87/354 X X X X X X 28 00/2
8. Vizibilitatea înapoi 71/127 88/321 X X X X X X 46 01/3
9. Sisteme de frânare 71/320 98/12 X X X X X X X X X X 13 09/2
9. Garnituri de frâne de înlocuire
71/320 98/12 X X X X X X X X X X 90 01/2
10. Compatibilitatea electromagnetica
72/245 95/54 X X X X X X X X X X 10 02
11. Emisii poluante vizibile la motoarele diesel
72/306 97/20 X X X X X X 24 03

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
283
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
12. Amenajarea interioara a autovehiculelor
74/60 2000/4 X 21 01/2
13. Dispozitive de protectie impotriva folosirii neautorizate
74/61 95/56 X X X X X X 18 02
13. Sisteme de alarma 74/61 95/56 X X X X X X 97 01
14. Protectia conducatorului fata de volan în cazul unei coliziuni
74/297 91/662 X X 12 03/3
15. Scaunele autovehiculelor, ancorajele si rezematoarele lor de cap
74/408 96/37 X X X X X X 17 07
16. Proeminente exterioare 74/483 87/354 X 26 02/1
17. Vitezometru si mersul înapoi
75/443 97/39 X X X X X X 39 00/2
18. Placi de identificare 76/114 87/354 X X X X X X X X X X - -
19. Ancorajele centurilor de siguranta
76/115 96/38 X X X X X X 14 05
20. Instalarea echipamentelor de iluminare si semnalizare luminoasa
76/756 97/28 X X X X X X X X X X 48 02
21. Catadioptri 76/757 97/29 X X X X X X X X X X 3 02/5
22. Lampi de contur, lampi de pozitie laterale fata si spate, lampi de frânare
76/758 97/30 X X X X X X X X X X 7 02/4
22. Lampi pentru circulatie diurna
76/758 97/30 X X X X X X X X X X 87 00/2
22. Lampi de contur 76/758 97/30 X X X X X X X X X X 91 00/2
23. Lampi indicatoare de directie
76/759 1999/15 X X X X X X X X X X 6 01/7

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
284
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
24. Dispozitive de iluminare a placii de înmatriculare spate
76/760 97/31 X X X X X X X X X X 4 00/7
25. Faruri si becuri cu incandescenta R2 si HS1
76/761 1999/17 X X X X X X 1 01/6
25. Faruri capsulate(sealed beam)
76/761 1999/17 X X X X X X 5 02/4
25. Faruri echipate cu becuri cu incandescenta cu halogen (H1, H2, H3, HB3, HB4, H7 si/sau H8)
76/761 1999/17 X X X X X X 8 04/7
25. Faruri echipate cu becuri cu incandescenta cu halogen (H4)
76/761 1999/17 X X X X X X 20 02/4
25. Faruri capsulate cu halogen 76/761 1999/17 X X X X X X 31 02/4
25. Becuri cu incandescenta destinate utilizarii la echipamente de iluminat omologate
76/761 1999/17 X X X X X X 37 03/18
25. Faruri echipate cu surse de lumina cu descarcare în gaz
76/761 1999/17 X X X X X X 98 00/1
25. Surse luminoase cu descarcare în gaz folosite la farurile autovehiculelor
76/761 1999/17 X X X X X X 99 00/1
26. Faruri de ceata (fata) 76/762 1999/18 X X X X X X 19 02/8
27. Dispozitive de remorcare 77/389 96/64 X X X X X X - -
28. Lampi de ceata spate 77/538 1999/14 X X X X X X X X X X 38 00/6
29. Lampi de mers înapoi 77/539 97/32 X X X X X X X X X X 23 00/5
30. Lampi de stationare 77/540 1999/16 X X X X X X 77 00/4
31. Centuri de siguranta 77/541 2000/3 X X X X X X 16 04/10

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
285
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
32. Câmpul de vizibilitate în fata al conducatorului
77/649 90/630 X - -
33. Identificarea comenzilor 78/316 94/53 X X X X X X - -
34. Dejivrarea si dezaburirea 78/317 - X - -
35. Stergatoare si spalatoare de parbriz
78/318 94/68 X - -
36. Incalzirea habitaclului 78/548 - X - -
37. Acoperirea rotilor 78/549 94/78 X - -
38. Rezematori de cap 78/932 87/354 X 17 07/2
39. Emisiile de CO2/Consum de combustibil
80/1268 1999/100 X - -
40. Puterea motorului 80/1269 1999/99 X X X X X X 85 00/1
41. Emisii la motoare diesel 88/77 2001/27 X X X X X X 49 02/2
42. Dispozitive de protectie antiîmpanare laterala
89/297 - X X X X 73 00/2
43. Dispozitive de protectie la împroscare
91/226 - X X X X - -
44. Mase si dimensiuni 92/21 95/48 X - -
45. Geamuri de securitate 92/22 - X X X X X X X X X X 43 00/6
46. Pneuri, autovehicule si remorci
92/23 - X X X X X X X X X X 30 02/11
46. Pneuri, autovehicule comerciale si remorci
92/23 - X X X X X X X X X X 54 00/13
46. Roti de rezerva de uz temporar
92/23 - X X X X X X X X X X 64 00/1
47. Limitatoare de viteza 92/24 - X X X - -
48. Mase si dimensiuni 97/27 - X X X X X X X X X - -

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
286
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
49. Proeminente exterioare ale cabinei
92/114 - X X X - -
50. Elemente mecanice de atelare
94/20 - X X X X X X X X X X - -
51. Comportarea la foc 95/28 - X - -
52. Impact frontal 96/79 1999/98 X - -
53. Impact lateral 96/27 - X X - -
54. Vehicule ADR 98/91 - X X X X X X X - -
55. Dispozitive antiîmpanare fata
2000/40 - X X 93 -

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
287
Tabelul 10.2.
Regulamente ECE Directive UE
Obiectul omologarii Nr.Reg ECE-OUN
Amend/
addenda
Directiva de baza CEE(CE)
Ultima modificare
Observatii
0 1 2 3 4 5
Frânarea 13H 00 - - Omologare alternativa, echivalenta cu omologarea conform Reg. 13 ECE - OUN, valabila si pentru vehicule omologate în afara Europei
Caracteristici constructive ale autobuzelor
36 03/1 - - Se aplica pâna la aparitia Directivei UE privind autobuzelele
Dispozitive de retinere pentru copii
44 03/2 - - Echiparea este optionala, dar dispozitivele trebuie omolgate conform Regulamentului nr. 44 ECE - OUN
Caracteristici constructive ale minibuzelor
52 01/1 - - Se aplica pâna la aparitia Directivei UE privind autobuzele
Proeminente exterioare ale cabinei
61 00 92/114 - Se recunoaste echivalenta pentru omologarea nationala
Rezistenta caroseriei autobuzelor
66 00/1 - - Încercarea poate fi înlocuita prin calcule
Autovehicule alimentate cu GPL
67 01 - - Cuprinde atât omologarea/ certificarea componentelor, cât si montarea pe

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
288
autovehicul
0 1 2 3 4 5
Determinarea vitezei maxime
68 00/1 - - Se poate demonstra si prin calcul sau alte metode
Omologare placi de identificare spate pentru vehicule lente
69 01 - -
Omologare placi de identificare spate pentru vehicule lungi si grele
70 01 - -
Ancorarea scaunelor autobuzelor
80 01/1 - - Se poate demonstra si prin calcul sau alte metode
Limitatoare de viteza
89 00 92/6 - Se recunoaste echivalenta pentru omologarea nationala
Instalarea limitatoarelor de viteza
89 00 92/94 - Se recunoaste echivalenta pentru omologarea nationala
Lampi de contur 91 02 - -
Dispozitiv de protectie antiîmpanare fata
93 00 2000/40 -
Masurare emisii de CO2, consum carburant
101 00/2 80/1268 1999/100 Se recunoaste echivalenta pentru omologarea nationala
Dispozitive scurte de atelare vehicule utilitare
102 00 - - N2 ,N3 ,O3 , O4

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
289
0 1 2 3 4 5
Omologare catalizatori de înlocuire
103 00/1 70/220 98/77 Se recunoaste echivalenta pentru piese de schimb la omologarea nationala
Omologare marcaje reflectorizante vehicule lungi si grele
104 00/1 - - Se aplica optional
Omologare vehicule ADR
105 01 98/91 - Se recunoaste echivalenta pentru omologarea nationala
Omologare pneuri resapate pentru auto- vehicule si remorci
108 00 - -
Omologare pneuri resapate pentru auto- vehicule comerciale si remorci
109 00 - -
Omologare vehicule- cisterna împotriva rasturnarii
111 01 - -

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
290
Tabelul 10.3.
Directive UE Regulamente ECE
Obiectul omologarii
Directiva de baza CEE (CE)
Ultima modifi- care
Nr. Reg ECE - UN
Amend/ addenda
Observatii
0 1 2 3 4 5
Caracteristici, precum si componente utilizate la tractoare cu roţi
74/151 98/38 - -
- masa maxima încarcat
74/151 I
98/38 - - T1, T2, T3, T4.1, T4.2
- placa de înmatriculare
74/151 II
98/38 - - T1, T2, T3, T4.1, T4.2
- rezervorul de carburant
74/151 III
98/38 - - T1, T2, T3, T4.1, T4.2
- mase – balast 74/151 IV
98/38 - - T1, T2, T3, T4.1, T4.2
- avertizor acustic 74/151 V
98/38 - - T1, T2, T3, T4.1, T4.2
Este aplicabila ca alternativa directiva 70/388/CE (autovehicule si remorci)
- nivel sonor (extern)
74/151 VI
98/38 - - T1, T2, T3, T4.1, T4.2
Este aplicabila ca alternativa Directiva 70/157/CE (autovehicule si remorci)

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
291
0 1 2 3 4 5
Viteza maxima prin constructie si platforma de încarcare a tractoarelor
74/152 98/89 - -
Viteza maxima 74/152 par. 1
98/89 - - T1, T2, T3, T4.1, T4.2
Platforma de încarcare
74/152 par. 2
98/89 - - T1, T2, T3, (T4.1), T4.2
Oglinzi retrovizoare
74/346 98/40 - - T1, T2, T3, (T4.1), T4.2
Câmpul de vizibilitate al tractoristului si stergator de parbriz
74/347 97/54 71 00 T1, T2, T3, (T4.1), (T4.2)
Este aplicabila ca alternativa Directiva 77/649/CE (autovehicule si remorci)
Sistemul de directie al tractoarelor cu roti
75/321 98/39 - - T1, T2, T3, T4.1, T4.2
Este aplicabila ca alternativa Directiva 70/311/CE (autovehicule si remorci)
Deparazitarea radio-electrica a tractoarelor cu roti
75/322 2000/2 - - T1, T2, T3, T4.1, T4.2
Este aplicabila ca alternativa Directiva 72/245/CE (autovehicule si remorci)
Frânarea tractoarelor cu roti
76/432 97/54 - - T1, T2, T3, (T4.1), T4.2
Este aplicabila ca alternativa Directiva 71/320/CE

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
292
0 1 2 3 4 5
Scaunul însotitorului la tractoarele cu roti
76/763 1999/86 - T1, T3, T4.1, T4.2, T4.1, T4.2
Nivelul sonor la urechile tractoristului
77/311 97/54 - T1, T2, T3, T4.1, T4.2
Dispozitiv de protectie în caz de rasturnare
77/536 1999/55 - - T1, T4.1, T4.2
Masuri contra emisiilor de fum ale motoarelor diesel
77/537 97/54 - - T1, T2, T3, T4.1, T4.2
Este aplicabila ca alternativa Directiva 72/306/CE (autovehicule si remorci)
Scaunul tractoristului
78/764 1999/57 - - T1, T2, T3, (T4.1), T4.2
Instalatia de iluminare si semnalizare luminoasa
78/933 1999/56 86 00/1 T1, T2, T3, (T4.1), (T4.2)
Omologarea corpurilor de iluminare si semnalizare luminoasa
79/532 97/54 - - T1, T2, T3, T4.1, T4.2
Sunt aplicabile ca alternativa directivele 76/757/CE, 76/758/CE, 76/759/CE, 76/760/CE, 76/761/CE, 76/762/CE, 77/538/CE, 77/539/CE (autovehicule si remorci)
Dispozitiv de remorcare, mersul înapoi
79/533 1999/58 - - T1, T2, T3, (T4.1), T4.2 Fara bara de remorcare

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
293
0 1 2 3 4 5
Dispozitive de protectie împotriva rasturnarii tractoarelor (încercari statice)
79/622 1999/40 - - T1, T4.1, T4.2
Spatiul de conducere si accesul la postul de conducere
80/720 97/54 - - T1, T3, T4.1, T4.2
Priza de putere si aparatoarele acesteia
86/297 97/54 - - T1, T2, T3, T4.1, T4.2
Dispozitive de protectie în cazul rasturnarii tract- toarelor cu ecartament îngust, montate în spate
86/298 2000/19 - - T2
Amplasarea si identificarea comenzilor
86/415 97/54 - - T1, T2, T3, T4.1, T4.2
Dispozitive de protectie antirostogolire pentru tractoare cu ecartament îngust, montate în fata
87/402 2000/22 - - T2
Caracteristici constructive si diverse componente ale tractoarelor
89/173 2000/1 - -
- dimensiuni si mase remorcabile
89/173 I
2000/1 - - T1, T2, T3, (T4.1), (T4.2)
- geamuri de securitate
89/173 III
2000/1 - - T1, T2, T3, T4.1, T4.2; Este aplicabila ca alternativa Directiva 92/22/CE

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
294
0 1 2 3 4 5
- regulator de viteze
89/173 II, 1
2000/1 - - T1, T2, T3, T4.1, T4.2
- protectia elementelor motorului
89/173 II, 2
2000/1 - - T1, T2, T3, (T4.1), T4.2
- legaturi mecanice
89/173 IV
2000/1 - - T1, T2, T3, T4.1, (T4.2)
- placuta fabricantului
89/173 V
2000/1 - - T1, T2, T3, T4.1, T4.2
- legaturi de frânare cu remorca
89/173 VI
2000/1 - - T1, T2, T3, T4.1, (T4.2)
Emisii poluante gazoase si particule din motoare
2000/25 - 96 00/1 T1, T2, T3, T4.1, T4.2 Este aplicabila ca alternativa Drectiva 88/77/CE (autovehicule si remorci)
Pneuri pentru vehiculele agricole si remorcile lor
- - 106 00/1
Tabelul 10.4.
Directive UE Regulamente ECE
Obiectul omologarii Directiva de baza CEE (CE)
Ultima modifi- care
Nr. Reg ECE - UN
Amend/ addenda
Observatii
0 1 2 3 4 5
Zgomotul si instalatia de evacuare, amortizoare de zgomot de înlocuire pentru motociclete
78/1015 89/235 - - De la 17.06.1999 aceasta directiva este înlocuita prin art. 3 par. 3 din Directiva 97/24/CE

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
295
0 1 2 3 4 5
Oglinzi retrovizoare 80/780 80/1272 81 00/1 De la 17.06.1999 aceasta directiva este înlocuita prin art. 3 par. 1 din Directiva 97/24/CE
Instalatia de frânare 93/14 - 78 02/2
Simbolizarea dispozitivul de comanda, control si indicatoare
93/29 2000/74 60 00/1 Regulamentul nr. 60 cuprinde si comenzile motocicletelor si mopedelor
Avertizorul sonor 93/30 - - -
Picior articulat de sprijin 93/31 2000/72 - -
Dispozitiv de retinere pentru însotitor la vehicule cu 2 roti
93/32 1999/24 - - Curea sau mânere
Dispozitive împotriva utilzarii neautorizate
93/33 1999/23 62 00/1
Inscriptii de identificare 93/34 1999/25 - -
Instalatia de iluminare si semnalizare luminoasa la vehicule cu 2-3 roti
93/92 2000/73 53 74 01/1 01/1 Echivalenta cu R 53/01/1 este recunoscuta prin D 93/92/CEE art. 3 iar cea cu R 74 pe plan national
Mase si dimensiuni la motociclete
93/93 - - -
Montarea placi înmatriculare motociclete
93/94 1999/26 - -
Viteza maxima prin constructie, momentul si puterea maxima utila
95/1 - - -
Caracteristici principale si componente ale vehiculelor cu 2-3 roti
97/24 - - -
- Pneuri si montarea lor 97/24 capitolul
1
- 30 54 64 75
02/11 00/13
00/1 00/9

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
296
0 1 2 3 4 5
- Echipamente de iluminare si semnanlizare luminoasa
97/24 capitol 2
97/24
-
19 20 37 38 50 56 57 72 82
02/8 026 034 006
00/2 00/2 01/2 00/2
00
- Proeminente exterioare 97/24
capitol 3
- - -
- Oglinzi retrovizoare 97/24
capitol 4
- 81 00/1
- Emisii poluante 97/24
capitol 5
- - -
- Rezervor de carburant 97/24
capitol 6
- - -
- Protectie împotriva utilitarii neautorizate
97/24
Capitol 7
- - -
- Compatibilitate electromagnetica
97/24
capitol 8
- - -
- Zgomot 97/24
capitol 9
- - -
- Dispozitive de atelare 97/24
capitol 10
- - -
- Centurile de siguranta pentru vehicule carosate si ancorarea lor
97/24
capitol 11
- - -
- Geamuri, instalatii de stergere, spalare, uscare si dejivrare a parbrizului
97/24 capitol
12
- - -
Vitezometrul 2000/7 - - -

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
297
BIBLIOGRAFIE 1 Apostolescu, N., ş.a., Bazele cercetării experimentale a maşinilor termice,
Editura Didactica şi Pedagogica, Bucuresti, 1979. 2 Asandei, C., Cercetări asupra dinamicii evenimentelor rutiere pieton – automobil,
teza de doctorat, Braşov, 2001. 3 Avramescu, N., ş.a., Dinamica accidentelor grave de circulaţie 1990-1999, M.I.
direcţia Poliţiei Rutiere, 2000. 4 Baron, T. s.a., Calitate şi fiabilitate. Editura Tehnica Bucuresti, 1988 5 Bartford, N.C., Experimental Measurements: Precision, Error, and Truth, John
Wiley and Sons, 2nd Edition, Chichester, 1985. 6 Bodan, I.M., Optimum staffing for machine maintenance P.H.D Dissartation,
New york Univarsity 0972 7 Braun, H., Untersuchungen uber Fahrbahnunebenheiten. Deutsche
Kraftfahrtfoshung und Strassenverkehrstechnik 186, 1966. 8 Câmpian O.V., Contribuţii la studiul solicitărilor din transmisiile mecanice ale
automobilelor în vederea dimensionării lor raţionale. Teză de doctorat, Universitatea TRANSILVANIA Braşov, 1998.
9 Câmpian, O., Studiul solicitărilor din transmisiile mecanice ale automobilelor., Editura Universităţii Transilvania Braşov, 2004.
10 Campian, O.,ş.a., Dinamica autovehiculelor. Vol I editura Universitatii "Transilvania" Brasov, 1999.
11 Câmpian, O.V., Aspecte privind cercetarea experimentală a solicitărilor din transmisiile mecanice ale autovehiculelor,În Revista Inginerilor de automobile, Nr. 4/1999, pag. 16-21.
12 Câmpian, O.V., Câmpian, V., Ciolan, Gh., Thierheimer, W.W., Determinarea colectivelor globale de solicitare ale componentelor transmisiei autovehiculelor pe baza măsurătorilor efectuate în trafic real, În buletinul, PRASIC’02 – Simpozion naţional cu participare internaţională Proiectarea ASIstată de Calculator, Vol. I – Mecanisme şi Tribologie, 7-8 noiembrie 2002, Braşov, România, ISBN 973-635-064-9.
13 Câmpian, O.V., Câmpian, V., Thierheimer, W., Basic Principles in the Experimental Research of Strain in Motor Vehicles Transmission., În buletinul celei de a 17-a conferinţe internaţionale, Science and Motor Vehicles’99 Automotive Engineering for Better Quality of Life, Constanţa, 11 iunie 1999, pag B16-1 la B16-4.
14 Câmpian, O.V., Câmpian, V., Thierheimer, W.,Solicitări în transmisiile mecanice ale automobilelor la deplasarea pe drumuri nemodernizate.În Buletinul sesiunii de comunicări Academia Militară, 1999, pag. 27-34.
15 Câmpian, O.V., Pereş, Gh., Câmpian, V., Bazele statistice ale cercetărilor în vederea stabilirii colectivelor de solicitare ale componentelor transmisiilor mecanice., În buletinul CONAT’96, vol. IV (Conferinţă naţională cu participare internaţională), Universitatea Transilvania Braşov, 13-15 noiembrie 1996, pag. 281-288.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
298
16 Câmpian, O.V., Pereş, Gh., Câmpian,V., Aspecte privind prelucrarea şi analiza datelor experimentale ce descriu cinematica mişcării autovehiculelor., În buletinul CAR’97 (Conferinţă cu participare internaţională), Piteşti 22 noiembrie 1997, pag. 105-110.
17 Câmpian, O.V., Pereş, Gh., Thierheimer, W., Câmpian, V., Modalităţi de prezentare condesată a datelor privind solicitările din transmisiile mecanice. În buletinul sesiunii de comunicări ştiinţifice a cadrelor didactice SECOMAR, Constanţa, 3-5 iunie 1999, vol. 3, pag. 158-164.
18 Câmpian, O.V., Pereş, Gh., Thierheimer, W., Câmpian, V., Studiul experimental al solicitărilor din transmisiile mecanice,În buletinul sesiunii de comunicări ştiinţifice a cadrelor didactice SECOMAR, Constanţa, 3-5 iunie 1999, vol. 3, pag. 165-170.
19 Câmpian, O.V., Principii de bază utilizate în cercetarea experimentală a solicitărilor din transmisiile mecanice ale autovehiculeor, În Tehnologii moderne Calitate Restructurare, vol. IV, Editura Tehnică INFO, Chişinău, 1999, ISBN-9975-910-77-7, pag. 265.
20 Câmpian, V., Dinamicitatea şi economicitatea automobilelor în regim de funcţionare nestaţionar,Teza de doctorat, Braşov, 1968.
21 Câmpian, V., Dinamicitatea şi economicitatea automobilelor în regim nestaţionar, Teza de doctorat, Braşov, 1968.
22 Ciocardia, C., ş.a., Bazele cercetării experimentale în tehnologia construcţiilor de maşini. Editura Didactică şi Pedagogică, Bucuresti, 1979.
23 Ciolan, Gh., Sălăjan, C., Preda, I., Filip, N., Câmpian, O.V., Traductor pentru măsurarea cuplului în transmisia automobilului tot-teren ARO-10, În buletinul sesiunii Centrului de Scafandrii Constanţa, Constanţa, 1991, pag. 132-135.
24 Dodds, C.J., Generalised Terrain Dynamic Inputs to Vehicles. BSI Document 72/34562 (ISO/TC/108/WG9(MEE/158/3/1)).
25 Dods, C.J., ş.a. The description of road surface roughness. Jurnal of Sound and Vibration 31, nr.2, 1973.
26 Doebelin, E.O., Measurement Systems: Aplications and Design, McGraw-Hill Kogazsha, Tokzo, 1975.
27 Drăghici, I., ş.a. Calculul şi construcţia cuplajelor, Editura Tehnică, 1978. 28 Federn, K., ş.a. Drehschwingungs-Prufmaschinen fur umlaufende
Maschinenelemente, Entwicklung under schwingungstechnischer und Konstruktionsmetodischen Aspekten. In: Konstruktion, nr. 9, 1974.
29 Filip, N.,Influenţa factorilor tehnologici asupra fiabilităţii autovehiculelor, Teza de doctorat, Brasov 1998.
30 Gaiginschi, R., Filip, I., Expertiza tehnică a acidentelor rutiere, Editura Tehnică, Bucureşti, 2002.
31 Ghejan, P., Vasu, O., Câmpian, O.V., Metoda de culegere şi prelucrare în analiza vibraţiilor aleatoare ale autovehiculelor. În buletinul CONAT 93 (Conferinţa Naţională de Automobile şi Tractoare cu paticipare internaţională), vol. II, Universitatea Transilvania Braşov, 18-20 martie 1993, Braşov, 1993, pag. 179-186.
32 Hilohi, C., Untaru, M., Soare, I., Druţă, Gh., Metode şi mijloace de încercare a automobilelor, Editura Tehnică, Bucureşti, 1982.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
299
33 Iantenco, N.N., Kolubania, procinat I forzinovanie ispatania grozavih automobile, Masinostrenie, Moskva, 1972.
34 Isaic-Maniu, Al., Metoda Weibull. Aplicaţii. Editura Academiei Romane, Bucuresti 1983
35 Kirkup, L., Experimental Methods: An Introductionn to Analzsis and Presentation of Data, John Wiley and Sound, Brisbane., 1994
36 Kuhnel, A., Der Fahrzeug Fussganger Unfall und seine Rekonstruktion Dissertation, TU-Berlin, 1980.
37 Kukukay F., Rechner unterstutztegentriebe-dimensionierung mit reprezentativen Lastkollective. ATZ 92, 1990.
38 LaBarre, R. P., ş.a.,The Measurement and analysis of road surface roughnes. Motor Industry Research Association Report. 1970, nr.5.
39 Laptev, ş.a., Dorojnie ispitanie automobilei, Masghiz, Moskva, 1962. 40 Manea, A. Cercetarea experimentală a Maşinilor Termice, Editura Matrix Rom,
Bucureşti,2002 41 Mitschke, M. ş.a., Dinamik der Kraftfahrzenge, Springer, Veslag, Berlin. 1972
Untaru, M., ş.a., Automobile, Editura Didactică şi Pedagogică, Bucureşti, 1975. 42 Nagy, T., Erlitz, U., Elementele unui program de fiabilitate pentru automobile.
Buletinul Universitatii Braşov vol XIX, 1977 43 Nagy, T.,Salajan, C. , Exploatarea şi tehnica transporturilor auto. Editura
Didactica si Pedagogica,Bucuresti, 1975. 44 Neagoe, D., Contribuţii teoretice şi experimentale la studiul stabilităţii şi
maniabilităţii autoturismelor de fabricaţie româneasca în vederea îmbunătăţirii acestora, Teza de doctorat, Brasov 2000.
45 Negruş E., Soare, I., ş.a., Încercarea autovehiculelor. Editura Didactică şi Pedagogică, Bucureşti, 1983.
46 Negrus, E, ş.a., Cercetarea experimentală a autovehiculelor, Institutul Politehnic Bucuresti, 1982
47 Plint, M., Marty, A., Engine, Engine Testing: Teory and Practice, Butterworth – Heinemann, Oxford, 1995.
48 Popescu I, Martinescu, I.,Fiabilitate. Editura Gryphon, Brasov, 1995 49 Rau, H., Erweiterte Analysemoglichkeiten von Fussgangerunfallen mit Hilfe
der rechnerischen Simulation suf der Basis des Mehrkorpersystems MADYMO, Vuf. 5/1998.
50 Rau, H., Kuhnel, A., Burg, H., Fussganger chwindikeiten und Zeugenansagen Dekra-Fachschriftenschibe, Vuf. 8/1976.
51 Rau, H., Otte D., Schulz B., Coliziuni autoturism - pieton în domeniul superior al vitezelor. Rezultate cu manechine în domeniul 70 - 90 km/h., Verkehrsunfall und Fahrzeugtechnik, 12/2000.
52 Sada, M.G., La methodologie des plans d'experiences. In revista Inginerus de l'automobile, nr.13, Decembrie, 1981
53 Sireţeanu, T., Gundisch, O., Părăian, S., Vibraţiile aleatoare ale automobilelor. Editura Tehnică, Bucureşti, 1981.

ÎNCERCAREA SI OMOLOGAREA AUTOVEHICULELOR
300
54 Soare, I., Instalaţii şi utilaje pentru încercarea automobilelor şi tractoarelor,
Institutul Politehnic Bucuresti, 1969. 55 Şoica, A., Aparatură şi tehnici de măsurare folosite la reconstruirea impactului
autoturism - pieton, Referat nr. 3 din teza de doctorat, Braşov, 2001. 56 Şoica, A., Asandei, C., Aspecte privind coliziunile de tipul autoturism – pieton,
Conferinţa NAV-MAR-EDU, Constanţa, 2001. 57 Şoica, A., Cercetări privind modelarea impactului autoturism - pieton, teza de
doctorat, Braşov, 2002. 58 Şoica, A., Florea, D., Aspects of human body modelling with application on car
crash tests, Conferinţa „Prevention of traffic accidents on roads 2000”, Novi Sad – Yugoslavia, 2000.
58 Şoica, A., Florea, D., Computer simulation of the pedestrian trajectory after the vehicle impact, Conferinţa „Prevention of traffic accidents on roads 2000”, Novi Sad – Yugoslavia, 2000.
60 Şoica, A., Florea, D., Luca Motoc, D., The conceive of an antropomorphic dummy for the car crash tests, A VIII-A Conferinţă de Autovehicule Rutiere, Piteşti, 2000.
61 Store, R., Air Flow Measurement in Internal Combustion Engine, SAE Paper No. 890242, 1989.
62 Thierheimer, W., Rus, F., Câmpian, O.V., Zamfira, S.,Research Concerning the Middle Class Vehicles Road Amble. În buletinul celei de a 17-a conferinţe internaţionale, Science and Motor Vehicles’99 Automotive Engineering for Better Quality of Life, Constanţa, 11 iunie 1999, pag B17-1 la B17-4.
63 Tierheimer, W., Cercetări privind optimizarea corelării suspensiei cu direcţia la autoturismelor cu tracţiune pe faţa, Teza de doctorat, Braşov, 1998.
64 Tiron, M., Prelucrarea statistică şi informaţională a datelor de măsurare. EdituraTehnică Bucureşti, 1976.
65 Tiron, M., Teoria erorilor de măsurare şi metoda celor mai mici pătrate., Editura Tehnică Bucureşti, 1972.
66 Untaru, M,,ş.a., Dinamica autovehiculelor. Reprografia Universităţii din Braşov, 1988.
67 Untaru, M., ş.a., Constructia şi calculul automobilelor, Editura Didactica si Pedagogica, Bucuresti, 1974.
68 Wright, D.H., Testing Automotive Materials and Components, Published by SAE, USA, 1993.
69 **** Bruel&Kjaer, documentaţie tehnică. 70 **** Colectia de regulamente a ECE-ONU. 71 **** Fatigue Design Book, Society of Automotive Engineer, New York, 1997. 72 **** Kistler, documentaţie tehnică.