kinematic synthesiscs194-28/fa15/lectures/kinematic-synthesis-1.pdf · challenges in kinematics •...
TRANSCRIPT
KinematicSynthesisOctober6,2015MarkPlecnik
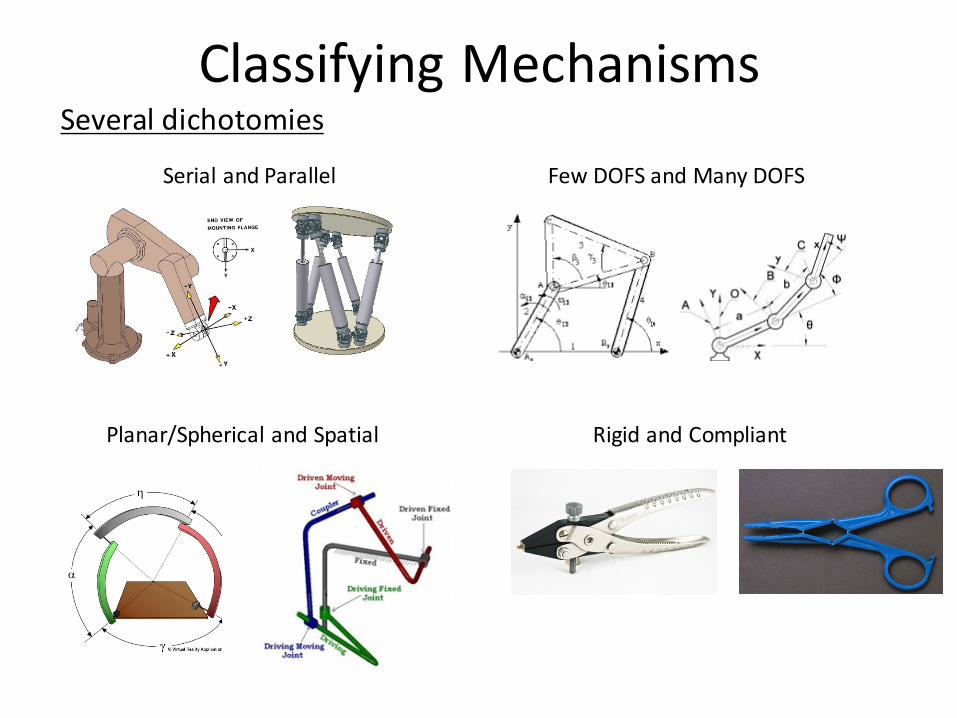
ClassifyingMechanismsSeveraldichotomies
SerialandParallel FewDOFSandManyDOFS
Planar/SphericalandSpatial RigidandCompliant
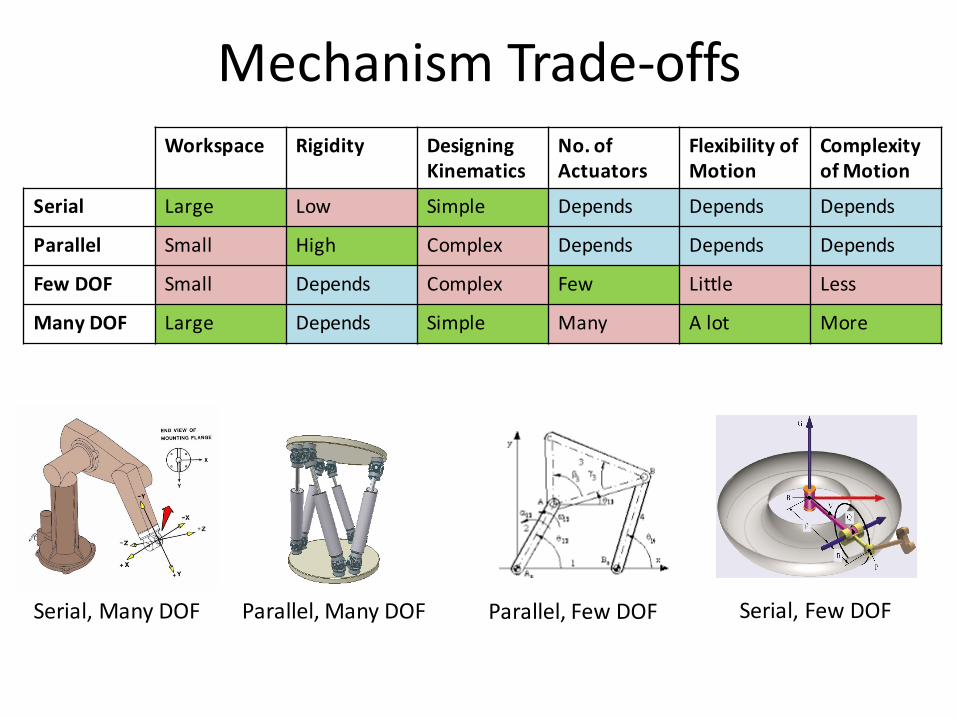
MechanismTrade-offsWorkspace Rigidity Designing
KinematicsNo. ofActuators
FlexibilityofMotion
ComplexityofMotion
Serial Large Low Simple Depends Depends Depends
Parallel Small High Complex Depends Depends Depends
FewDOF Small Depends Complex Few Little Less
ManyDOF Large Depends Simple Many Alot More
Serial,ManyDOF Parallel,ManyDOF Parallel,FewDOF Serial,FewDOF
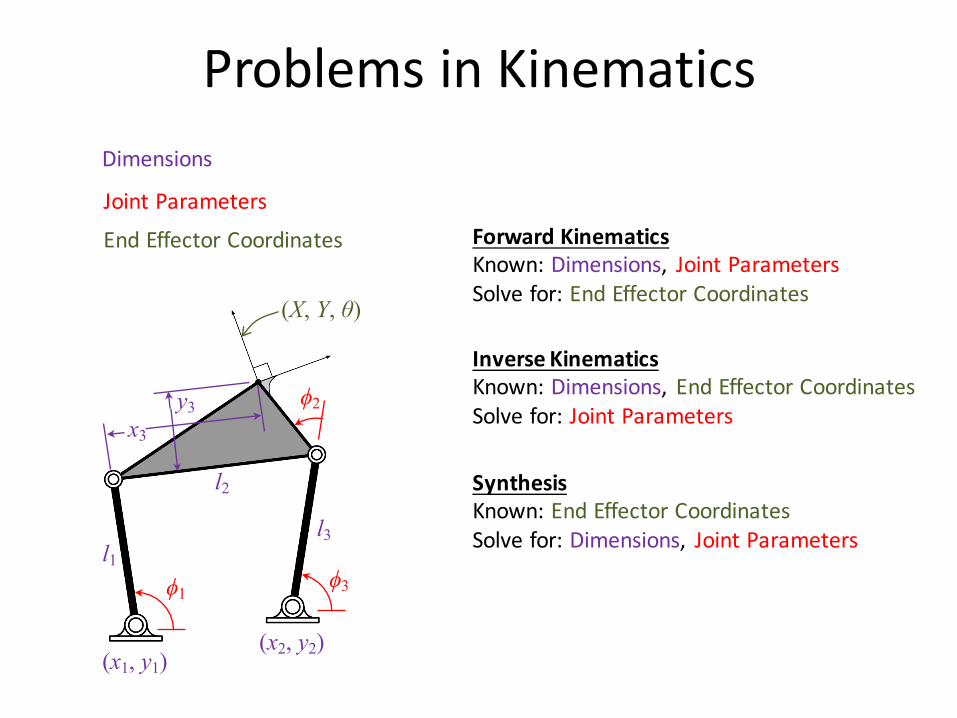
ProblemsinKinematics
(x1, y1)(x2, y2)
l1
l2
l3
x3
y3
(X, Y, θ)
ϕ1
ϕ2
ϕ3
Dimensions
JointParameters
EndEffectorCoordinates ForwardKinematicsKnown:Dimensions, JointParametersSolvefor:EndEffectorCoordinates
InverseKinematicsKnown:Dimensions, EndEffectorCoordinatesSolvefor:JointParameters
SynthesisKnown:EndEffectorCoordinatesSolvefor:Dimensions, JointParameters
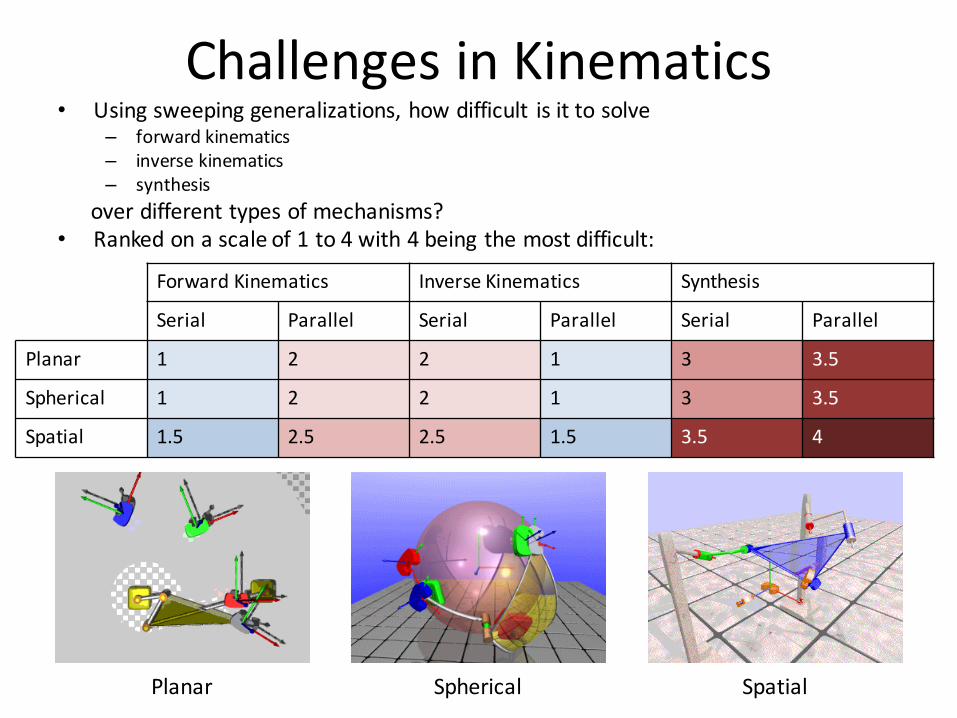
ChallengesinKinematics• Usingsweepinggeneralizations,howdifficult isittosolve
– forwardkinematics– inversekinematics– synthesis
overdifferenttypesofmechanisms?• Rankedonascaleof1to4with4being themostdifficult:
ForwardKinematics InverseKinematics Synthesis
Serial Parallel Serial Parallel Serial Parallel
Planar 1 2 2 1 3 3.5
Spherical 1 2 2 1 3 3.5
Spatial 1.5 2.5 2.5 1.5 3.5 4
Planar Spherical Spatial
SynthesisApproaches• Synthesisequationsarehardtosolvebecausealmostnothing isknownabout
themechanismbeforehand
SomeMethodsforSynthesis• Graphicalconstructions– 1soln perconstruction• Useatlases(libraries)(seehttp://www.saltire.com/LinkageAtlas/)• Evolutionaryalgorithms– multiplesolutions• Optimization– 1soln,goodstartingapproximationrequired• Samplingpotentialpivotlocations• Resultanteliminationmethods– allsolutions,limitedtosimpler
systems• Groebner Bases– allsolutions,limitedtosimplersystems• Intervalanalysis– allsolutionswithinaboxofusefulgeometric
parameters• Homotopy– allsolutions,canhandledegreesinthemillionsand
possiblygreaterwithveryrecentdevelopments
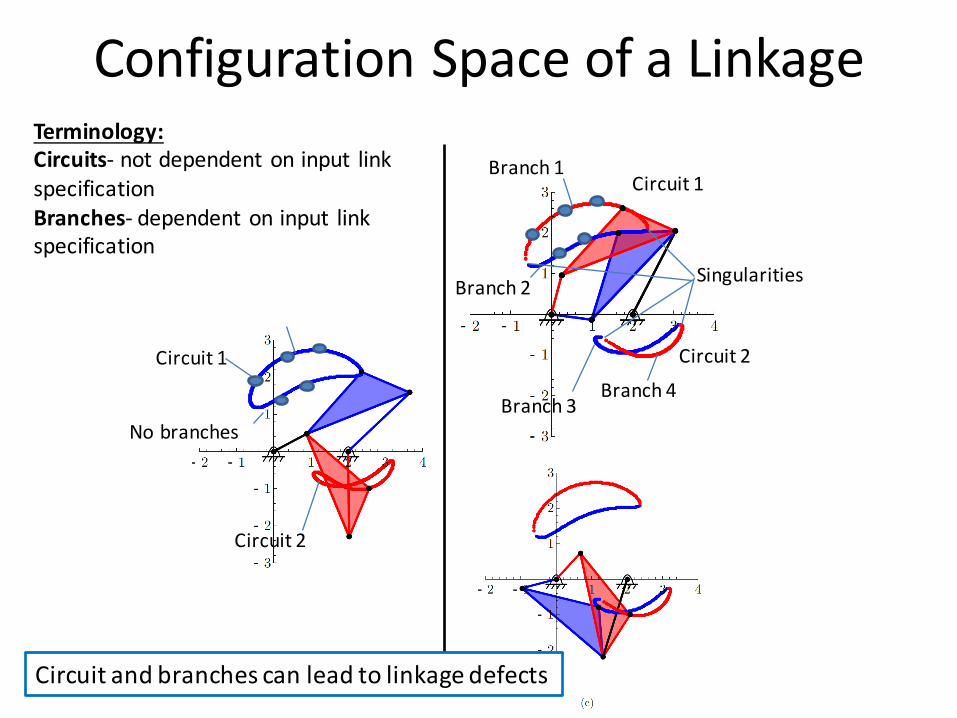
ConfigurationSpaceofaLinkageTerminology:Circuits- notdependentoninput linkspecificationBranches- dependentoninput linkspecification
Circuit1
Circuit2
Nobranches
Circuit1
Circuit2
Branch1
Branch2
Branch3Branch4
Singularities
Circuitandbranchescanleadtolinkagedefects
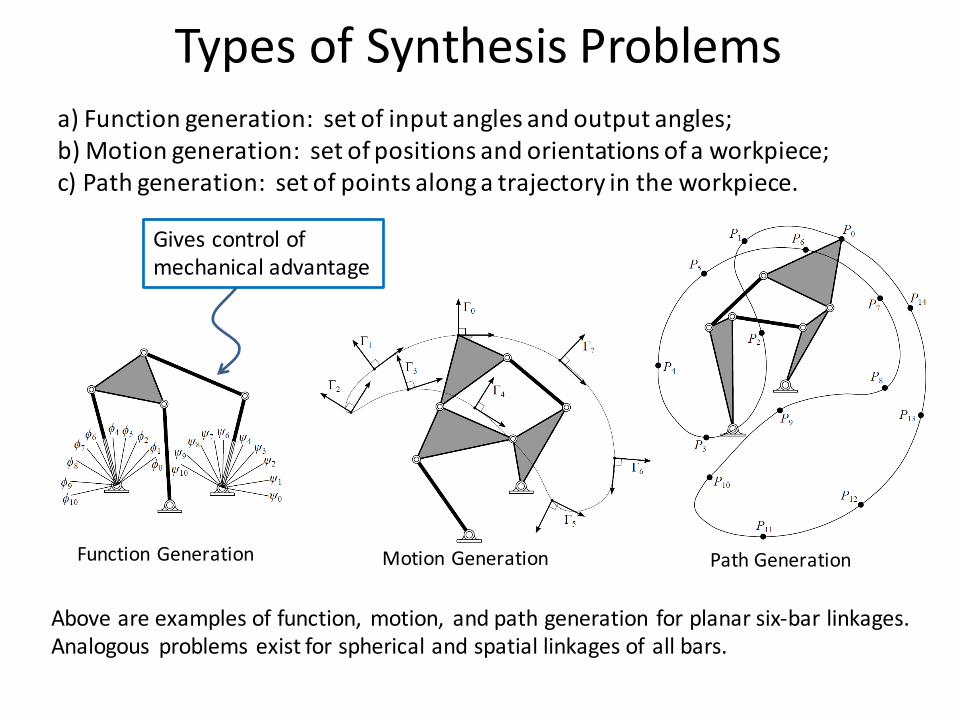
TypesofSynthesisProblemsa)Functiongeneration:setofinputanglesandoutputangles;b)Motiongeneration:setofpositionsandorientationsofaworkpiece;c)Pathgeneration:setofpointsalongatrajectoryintheworkpiece.
FunctionGeneration MotionGeneration PathGeneration
Aboveareexamplesoffunction,motion, andpathgeneration forplanarsix-barlinkages.Analogous problemsexistforsphericalandspatiallinkagesofallbars.
Givescontrolofmechanicaladvantage
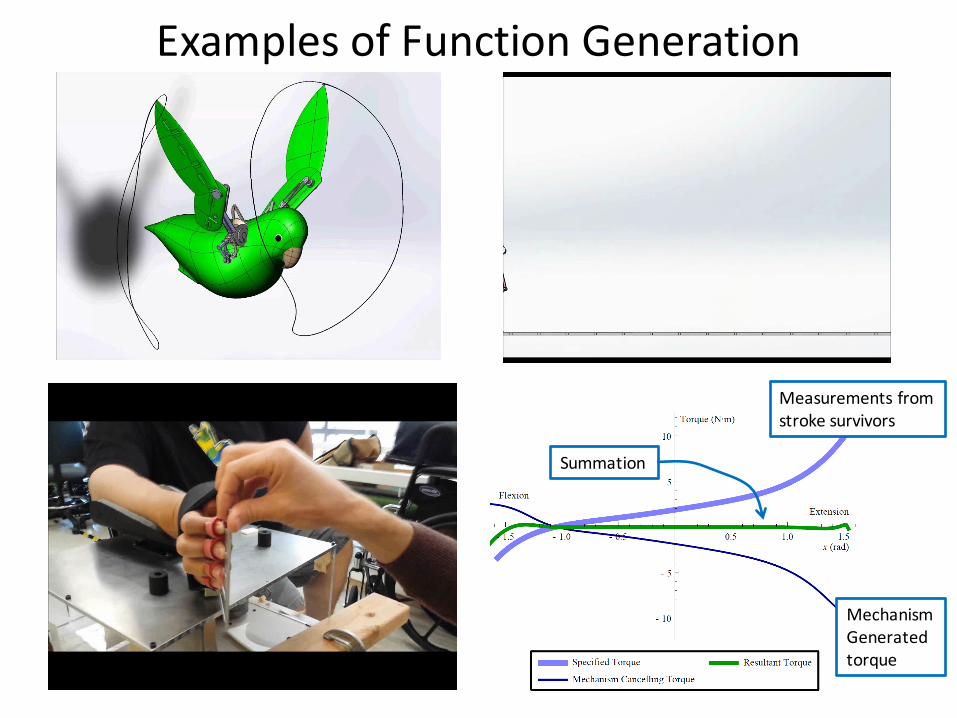
ExamplesofFunctionGeneration
Measurementsfromstrokesurvivors
MechanismGeneratedtorque
Summation

TheBirdExampleTechnique• Spatialchainsareconstrainedbysix-barfunctiongenerators
Spatialchain4DOF
Functiongeneratorstocontroljointangles AsingleDOF
constrainedspatialchain
Goal:achieveaccuratebiomimeticmotion
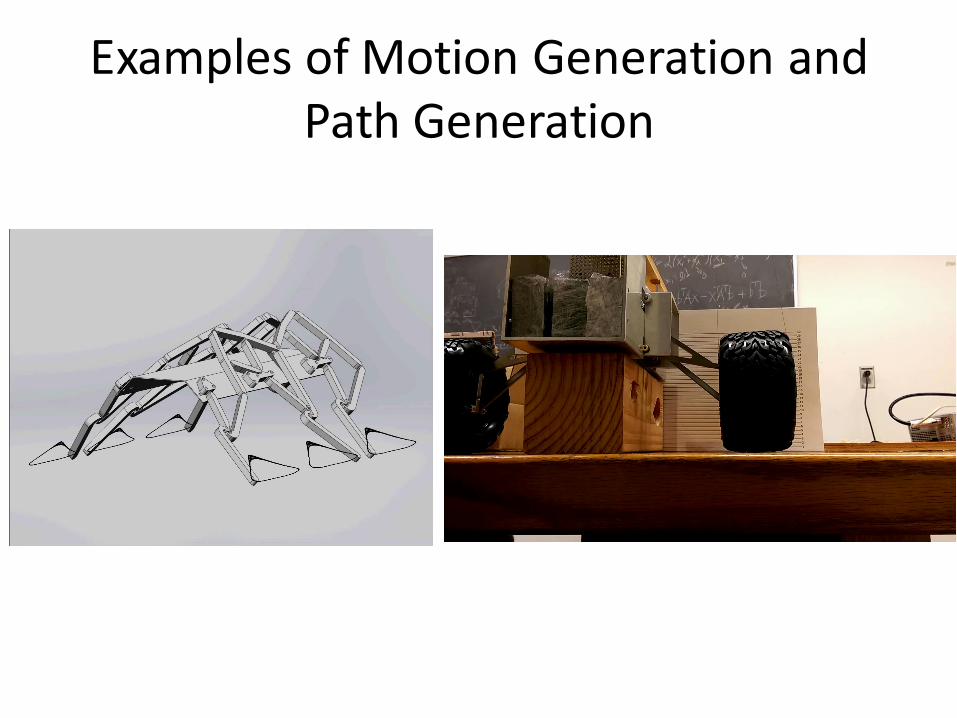
ExamplesofMotionGenerationandPathGeneration
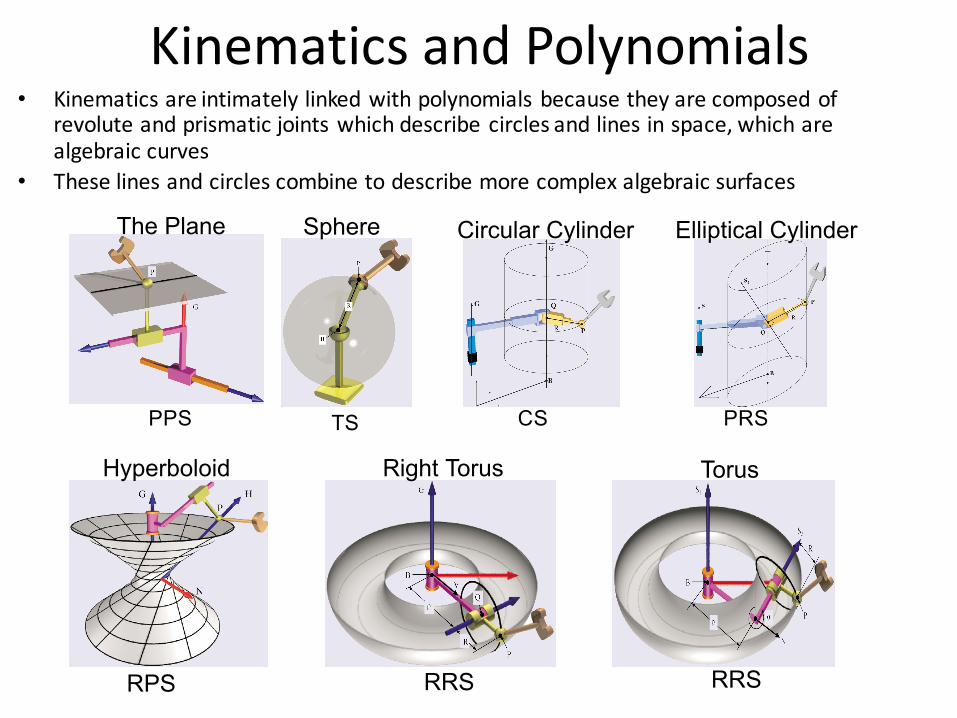
KinematicsandPolynomials• Kinematicsareintimatelylinkedwithpolynomialsbecausetheyarecomposedof
revoluteandprismaticjointswhichdescribecirclesandlinesinspace,whicharealgebraiccurves
• Theselinesandcirclescombinetodescribemorecomplexalgebraicsurfaces
PPS TS CS PRS
The Plane Sphere Elliptical CylinderCircular Cylinder
Hyperboloid
RPS
Right Torus
RRS
Torus
RRS
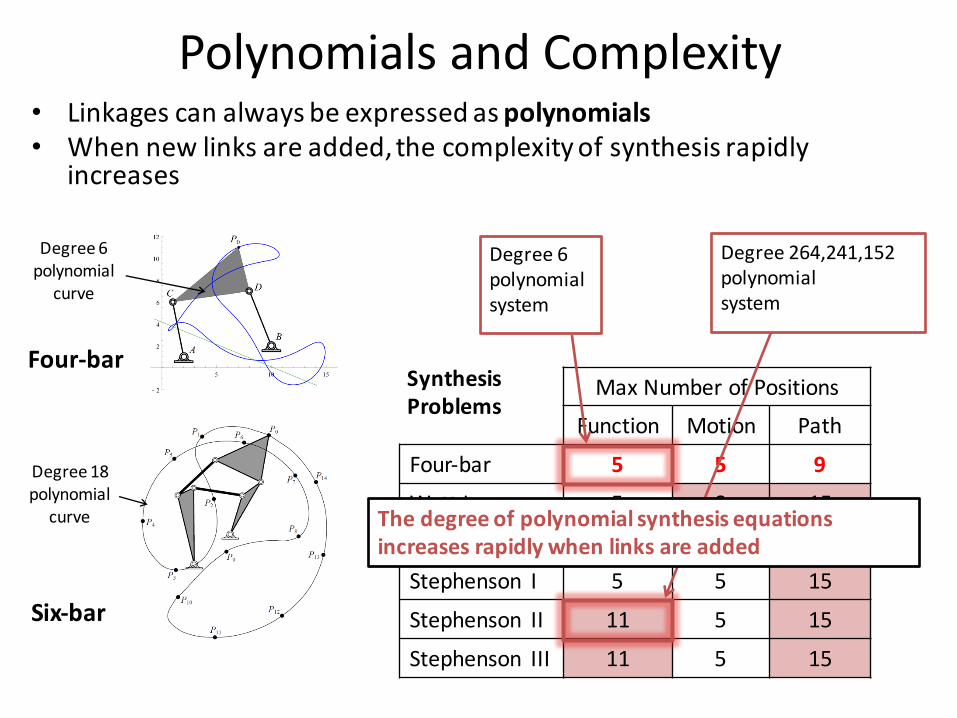
MaxNumberofPositionsFunction Motion Path
Four-bar 5 5 9
WattI 5 8 15
Watt II 9 5 9
Stephenson I 5 5 15
Stephenson II 11 5 15
Stephenson III 11 5 15
PolynomialsandComplexity• Linkagescanalwaysbeexpressedaspolynomials• Whennewlinksareadded,thecomplexityofsynthesisrapidly
increases
Four-bar
Six-bar
Degree6polynomial
curve
Degree18polynomial
curve
Degree6polynomialsystem
Degree264,241,152polynomialsystem
SynthesisProblems
Thedegreeofpolynomialsynthesisequationsincreasesrapidlywhenlinksareadded
Degree1polynomialcurve:
Degree2polynomialcurve:
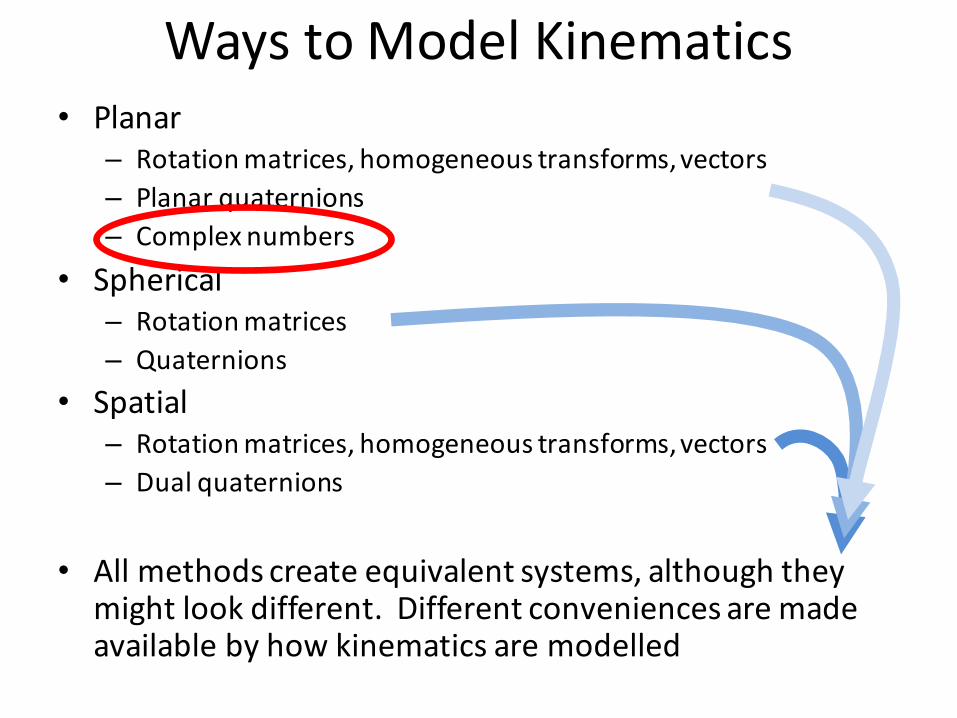
WaystoModelKinematics• Planar
– Rotationmatrices,homogeneoustransforms,vectors– Planarquaternions– Complexnumbers
• Spherical– Rotationmatrices– Quaternions
• Spatial– Rotationmatrices,homogeneoustransforms,vectors– Dualquaternions
• Allmethodscreateequivalentsystems,althoughtheymightlookdifferent.Differentconveniencesaremadeavailablebyhowkinematicsaremodelled
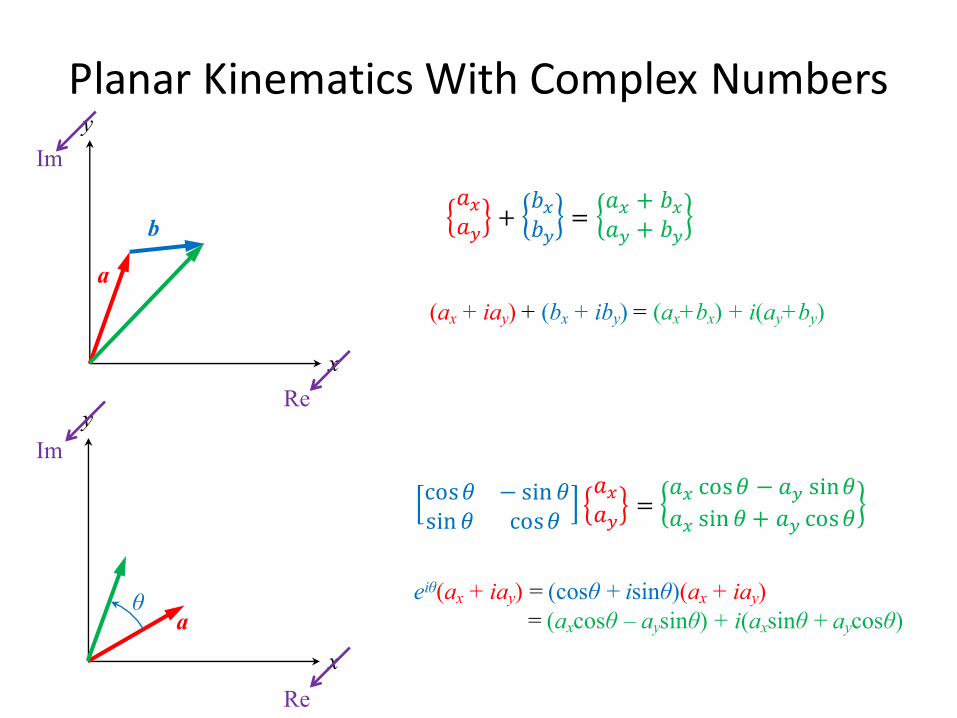
PlanarKinematicsWithComplexNumbers
θ
𝑎"𝑎# +
𝑏"𝑏#
=𝑎" + 𝑏"𝑎# + 𝑏#
cos𝜃 − sin 𝜃sin 𝜃 cos𝜃
𝑎"𝑎# =
𝑎" cos𝜃 − 𝑎# sin𝜃𝑎" sin 𝜃 + 𝑎# cos𝜃
(ax + iay) + (bx + iby) = (ax+bx) + i(ay+by)
eiθ(ax + iay) = (cosθ + isinθ)(ax + iay)= (axcosθ – aysinθ) + i(axsinθ + aycosθ)
a
b
x
y
x
y
Re
Im
Re
Im
a